optimal regions for congested transport - ricam | welcome filewe consider a geographical region in...
TRANSCRIPT

Optimal regions for congested
transport
Giuseppe Buttazzo
Dipartimento di Matematica
Universita di Pisa
http://cvgmt.sns.it
Workshop “Optimal Transport in the Applied Sciences”Johann Radon Institute (RICAM)
Linz, December 8–12, 2014

Joint work with:
Guillaume Carlier - Paris DauphineSerena Guarino - University of Pisa
Math. Model. Numer. Anal. (M2AN),(to appear)
available at:http://cvgmt.sns.it
arxiv.org
1

We consider a geographical region Ω in which
two densities f+ and f− are given; for in-
stance we may think f+ is the distribution
of residents in Ω and f− the distribution of
working places. We assume∫Ωf+ dx =
∫Ωf− dx.
We also assume that the transport in Ω is
congested and that the congestion function
is given by a convex nonnegative superlinear
function H.
2

It is known that in this case the traffic flux σ,
in the stationary regime, reduces to a min-
imization problem of the form (Beckmann
model)
min ∫
ΩH(σ) dx : σ ∈ Γf
where
Γf =− div σ = f in Ω, σ · n = 0 on ∂Ω
,
being f = f+− f−. See for instance Brasco-
Carlier, Carlier-Jimenez-Santambrogio for de-
tails on the model.
3

The pure Monge’s problem corresponds to
H(s) = |s| in which no congestion occurs,
and the congestion effect is higher for larger
functions H.
In some cases, the transportation cost can
be +∞ if the source and target measures f+
and f− are singular; for instance, if H has a
quadratic growth, in order to have a finite
cost it is necessary that the signed measure
f = f+ − f− be in the dual Sobolev space
H−1.
4

Our goal is to reduce the congestion acting
on a suitable region C which has to be deter-
mined. More precisely, two congestion func-
tions H1 and H2 are given, with H1 ≤ H2,
and the goal is to find an optimal region
C ⊂ Ω where we enforce a traffic conges-
tion reduction.
Since reducing the congestion in C is costly,
a penalization term m(C) is added, to de-
scribe the cost of the improvement, then pe-
nalizing too large low-congestion regions.
5

For every region C we then consider the shape
function
F (C) = min ∫
Ω\CH2(σ) dx+
∫CH1(σ) dx : σ ∈ Γf
and so the optimal design of the low-congestion
region amounts to the minimization problem
minF (C) +m(C) : C ⊂ Ω
.
Much of the analysis below depends on the
penalization function m(C).
6

The case m(C) = kPer(C)
Theorem For every k > 0 there exists anoptimal solution Copt.
Indeed, a minimizing sequence Cn has a uni-formly bounded perimeter and so we may as-sume that Cn tends strongly in L1 to someset C. The perimeter is L1-lower semicon-tinuous; moreover, the optimal σn ∈ Γf pro-viding the value
F (Cn) =∫
Ω\CnH2(σn) dx+
∫CnH1(σn) dx
7

are weakly L1 compact, due to the super-
linearity of the congestion functions (de La
Vallee Poussin theorem). The conclusion
now follows from the strong-weak lower semi-
continuity theorem for integral functionals.
The necessary conditions of optimality are:
σ =
∇H∗1(∇uint) in C
∇H∗2(∇uext) in Ω \ C
where uint and uext solve the PDEs
8

−div(∇H∗1(∇uint)
)= f in C
∇H∗1(∇uint) · ν = 0 on ∂Ω ∩ C−div(∇H∗2(∇uext)
)= f in Ω \ C
∇H∗2(∇uext) · ν = 0 on ∂Ω ∩ (Ω \ C)
with the transmission condition across ∂C
∇H∗1(∇uint)−∇H∗2(∇uext)·νC = 0 on ∂C∩Ω.
Performing the shape derivative on ∂C we
also obtain on ∂C ∩Ω
9

H2
(∇H∗2(∇uext)
)−H1
(∇H∗2(∇uext)
)≤ kHC
≤ H2
(∇H∗1(∇uint)
)−H1
(∇H∗1(∇uint)
).
where HC is the mean curvature on ∂C. Since
H1 ≤ H2 this gives that HC ≥ 0.
If d = 2 and Ω is convex, replacing C by
its convex hull diminishes the perimeter and
also the congestion cost, so the optimal C
are convex.
10

The case m(C) = k|C|
Passing from sets C to density functions θ(x) ∈[0,1] we obtain the relaxed formulation
minσ,θ
∫Ω
(θH1(σ) + (1− θ)H2(σ) + kθ
)dx
.
The minimization with respect to θ is straight-forward and the optimal θ is
θ = 1H1(σ)+k<H2(σ),
which reduces the problem to
minσ
∫ΩH2(σ) ∧
(H1(σ) + k
)dx.
11

Since the function H = H2 ∧ (H1 + k) is not
convex, a further relaxation gives finally the
problem
minσ
∫ΩH∗∗(σ) dx.
If σ is a solution, we have
• if H∗∗(σ) = H2(σ) we take θ = 0, that is no
improvement for low congestion is needed;
• if H∗∗(σ) = H1(σ) + k we take θ = 1, that
is in this region we have to spend a lot to
improve the congestion;
• if H∗∗(σ) < H(σ) we have to spend re-
sources proportionally to θ(x) ∈]0,1[.
12

If H1 and H2 only depend on |σ| we get
θ(x) =
0 if |σ| ≤ r1|σ|−r1r2−r1
if r1 < |σ| < r2
1 if |σ| ≥ r2
where r1 and r2 can be explicitly computed
from H1 and H2:
r1 = max. solution of H∗∗(r) = H2(r)
r2 = min. solution of H∗∗(r) = H1(r) + k.
Some numerical computations can be made
when H1 and H2 are quadratic.
13

The problem in this case is similar to thetwo-phase shape optimization problem, forwhich we refer to the book by Allaire [Springer2001]. We take:
H1(σ) = a|σ|2, H2(σ) = b|σ|2 with a < b.
Then we have
H∗(ξ) =ξ2
4b∨(ξ2
4a− k
)and we simply have to solve the elliptic prob-lem (with Neumann b.c.)
min ∫
Ω
(H∗(∇u)− fu
)dx
.
14
Heuristically we may expect for highly con-centrated sources a distribution of the low-congestion region around the sources. Onthe contrary, for sources with a low con-centration, we may expect a distribution ofthe low-congestion region mostly betweenf+ and f−.
In the following examples, we consider f+
and f− two Gaussian distributions with vari-ance λ, centered at two points x0 and x1.We also take a = 1 and b = 4 (at equal traf-fic density the velocity in the low-congestionregion = four times the one in the regionwith normal congestion).
15

Gaussian sources (left) with variance λ =
0.02; plot of θ (right) using the penalization
parameter k = 0.4. Computations made by
Serena Guarino using FreeFem.
16
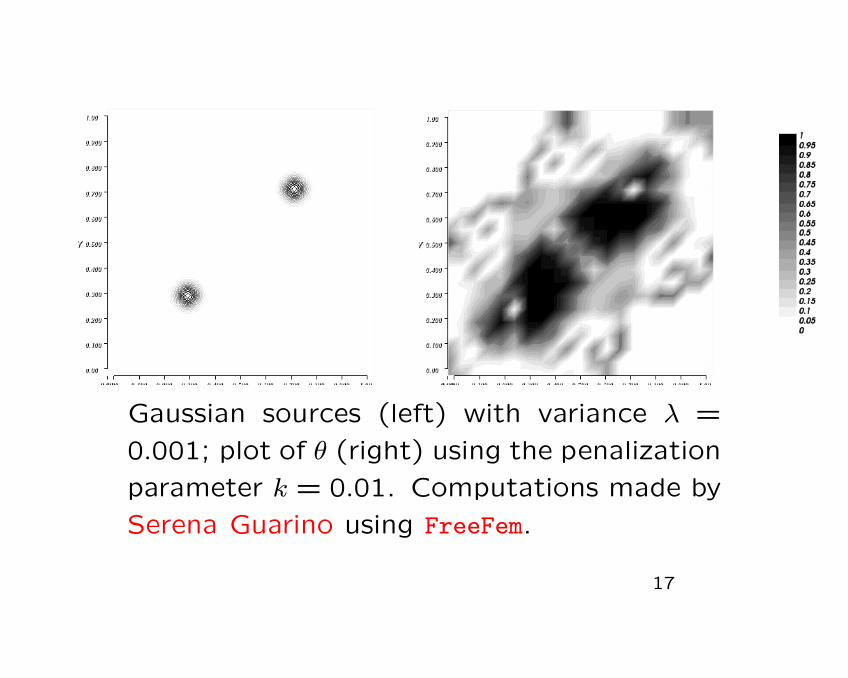
Gaussian sources (left) with variance λ =
0.001; plot of θ (right) using the penalization
parameter k = 0.01. Computations made by
Serena Guarino using FreeFem.
17

A free boundary problem arising in PDEoptimization(Joint work with E. Oudet and B. Velichkov)
In the problem above assume we have a groundcongestion given by the function H(σ) =12|σ|
2 and that, investing an amount θ ofresources produces a lower congestion like
12(1+θ)|σ|
2. We have then the problem
sup∫D θ dx=m
infu∈H1
0(D)
∫D
(1 + θ
2|∇u|2 − fu
)dx
where the total amount of resources to spendis fixed.
18

In this case the Dirichlet zero boundary con-dition means that we want to transport themass f(x) dx to the boundary of D. A similarsituation occurs when we have the Neumannboundary condition but for a right-hand sidef with zero mean.
Interchanging the sup and the inf above gives
infu∈H1
0(D)sup∫
D θ dx=m
∫D
(1 + θ
2|∇u|2 − fu
)dx
and now the sup with respect to θ, for a fixedu, is easy to compute and we end up with
minu∈H1
0(D)
1
2
∫D|∇u|2 dx+
m
2‖∇u‖2∞−
∫Dfu dx
.
19

The existence of a solution u for this lastproblem is straightforward and, by strict con-vexity it is also unique. In order to solve theinitial optimization problem the questions areto recover the optimal function θ from u andto describe the boundary of the free set
Ω =|∇u| < ‖∇u‖∞
.
• An easier case is the torsion problem, wheref = 1. Indeed, we may show the equivalencewith the obstacle problem
min ∫
D
(1
2|∇u|2−u
)dx : u ∈ H1
0(D), u(x) ≤ kd(x)
20

where d(x) is the distance function from ∂D
and k = ‖∇u‖∞. In this case the free set
Ω =|∇u| < ‖∇u‖∞
coincides with the
complement|u| < kd
of the contact set.
Since the solution uk of the obstacle prob-
lem is continuous, the free set Ω is open.
• Still in the torsion case, by the equivalence
with the obstacle problem, we may conclude
that the free boundary ∂Ω is C1,α up to a
singular set of zero Hausdorff d−1 measure.
21

• Still in the torsion case, the cut locus of D,that is the set where the distance functiond is singular, is fully contained into the freeset Ω.
• When f = 1 and D is the unit ball, theexplicit expression of θ can be computed:
θ(r) =[r
am− 1
]+where am is a suitable constant.
• The previous argument cannot be repeatedfor a general right-hand side f .
22

• A much easier case is when the constraint
on θ is of Lp type (p > 1)θ ≥ 0,
∫Dθp dx ≤ m
.
In this case the optimal θ is given by (q = p′)
θ = m1/p|∇u|2/(p−1)( ∫
D|∇u|2q dx
)−1/p
where u solves the minimum problem for
1
2
∫D|∇u|2 dx+
m1/p
2
( ∫D|∇u|2q dx
)1/q−∫Dfu dx.
23

• Question 1. If the right-hand side f is as-
sumed regular, can we obtain regularity re-
sults for the free boundary ∂Ω? This would
imply that on the free set Ω the PDE
−∆u = f
holds. Similarly, one may expect a regularity
result for u.
• Question 2. Under which conditions on
the data the free set Ω does not touch the
exterior boundary ∂D? This seems to hap-
pen in several numerical computations.
24

•Question 3. Can we prove that an optimal
function θ exists? In this case its support is
contained in D \ Ω; moreover, if the free set
Ω is regular, we obtain that θ satisfies the
first order equation
−div(θ∇u) = f in D \ Ω.
In the torsion case this amounts to the PDE
∇θ · ∇d+ θ∆d = cf in D \ Ω
for a suitable constant c.
25

Plot of the gradient when D is the unit disk
and f = 1. The red line is the free boundary,
m = 0.5 left, m = 0.1 right.
26

Plot of the gradient when D is the unit square
and f = 1. The red line is the free boundary,
m = 0.5 left, m = 0.1 right.
27

Plot of the gradient when D is an ellipse and
f = 1. The red line is the free boundary,
m = 0.5 left, m = 0.1 right.
28

Plot of the gradient when D is a treffle and
f = 1. The red line is the free boundary,
m = 0.5 left, m = 0.1 right.
29

Other pictures are available at the Edouard
Oudet web page.
Work in progress with E. Oudet and B.
Velichkov.
30