optimisation de la macro et microgéométries des … · • une dépouille linéaire en tête, 2...
TRANSCRIPT

1
Optimisation de la macro et microgéométries des
dentures pour minimiser les fluctuations de l’erreur
de transmission et de la raideur d'engrènement
Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
2
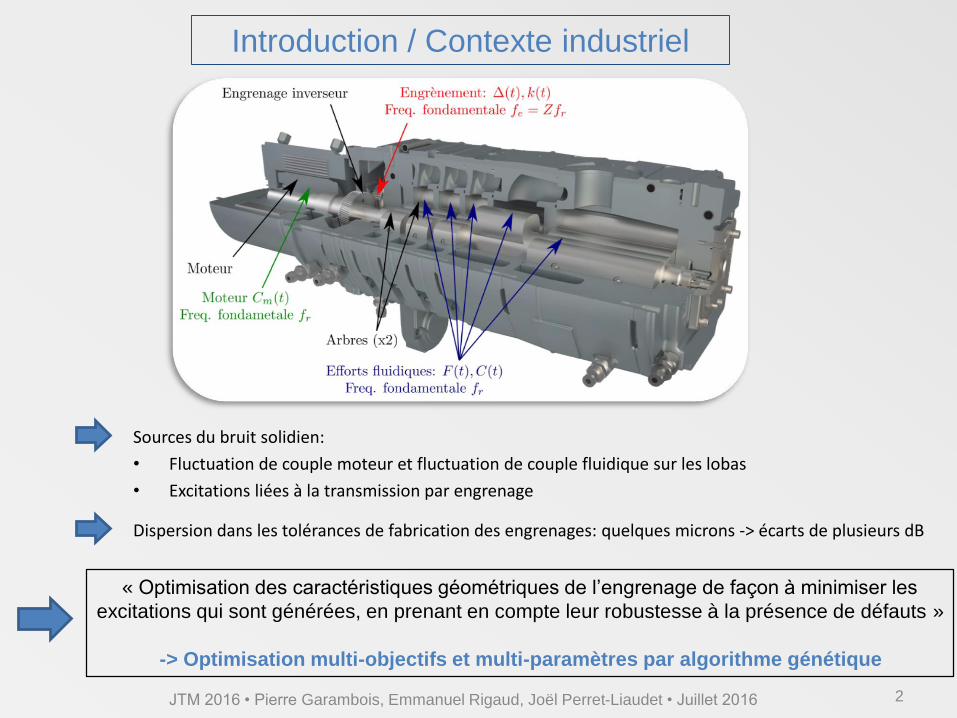
Introduction / Contexte industriel
Sources du bruit solidien:
• Fluctuation de couple moteur et fluctuation de couple fluidique sur les lobas
• Excitations liées à la transmission par engrenage
« Optimisation des caractéristiques géométriques de l’engrenage de façon à minimiser les
excitations qui sont générées, en prenant en compte leur robustesse à la présence de défauts »
-> Optimisation multi-objectifs et multi-paramètres par algorithme génétique
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
Dispersion dans les tolérances de fabrication des engrenages: quelques microns -> écarts de plusieurs dB

JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016 3
Plan
1. Caractérisation des excitations générées par les engrenages
2. Objectifs et paramètres de l’optimisation
3. Modèle analytique de flexion de dentures
4. Algorithme d’optimisation
5. Résultats
4
1- Caractérisation des excitations générés par la
transmission par engrenage
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
5
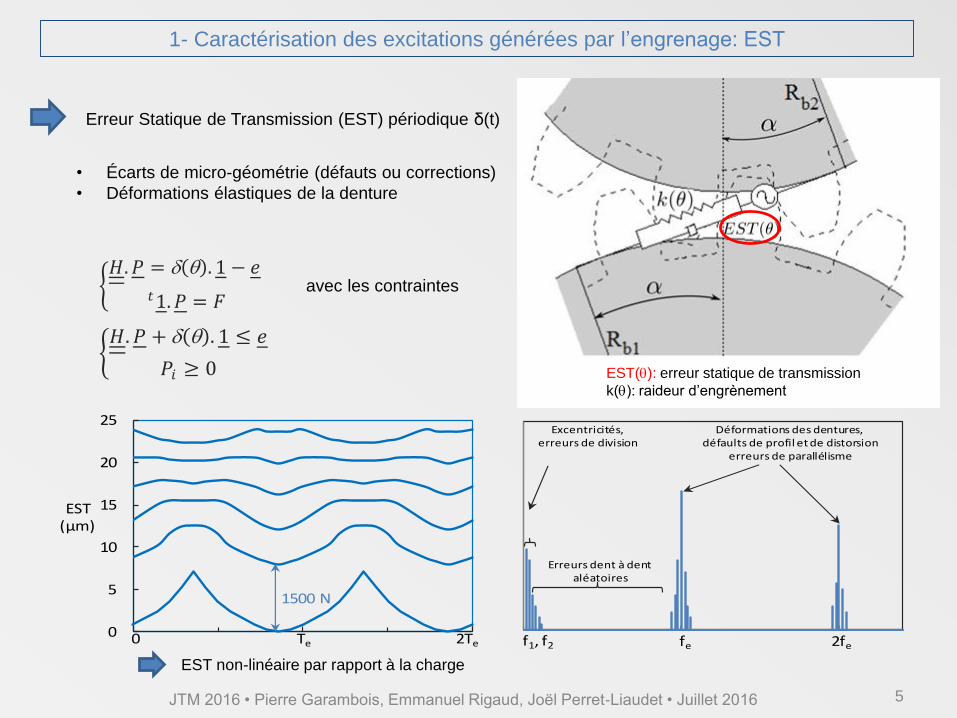
1- Caractérisation des excitations générées par l’engrenage: EST
𝐻.𝑃 = . 1 − 𝑒
𝑡1.𝑃 = 𝐹
Erreur Statique de Transmission (EST) périodique δ(t)
𝐻.𝑃 + . 1 ≤ 𝑒
𝑃𝑖 ≥ 0
• Écarts de micro-géométrie (défauts ou corrections)
• Déformations élastiques de la denture
0
5
10
15
20
25
EST (µm)
Te
1500 N
2Te0 f1, f2 fe 2fe
Excentricités,erreurs de division
Déformations des dentures,défaults de profil et de distorsion
erreurs de parallélisme
Erreurs dent à dent aléatoires
avec les contraintes
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
EST(): erreur statique de transmission
k(): raideur d’engrènement
EST non-linéaire par rapport à la charge
6
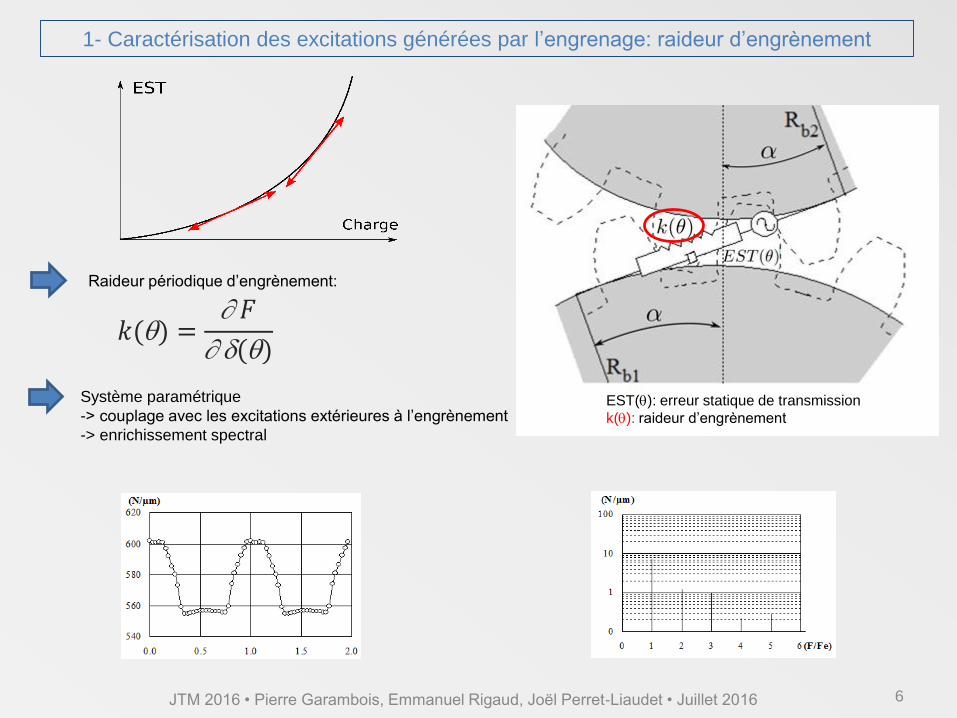
𝑘() = 𝐹
()
Raideur périodique d’engrènement:
Système paramétrique
-> couplage avec les excitations extérieures à l’engrènement
-> enrichissement spectral
1- Caractérisation des excitations générées par l’engrenage: raideur d’engrènement
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
EST(): erreur statique de transmission
k(): raideur d’engrènement

7
2- Objectifs et paramètres de l’optimisation
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
8
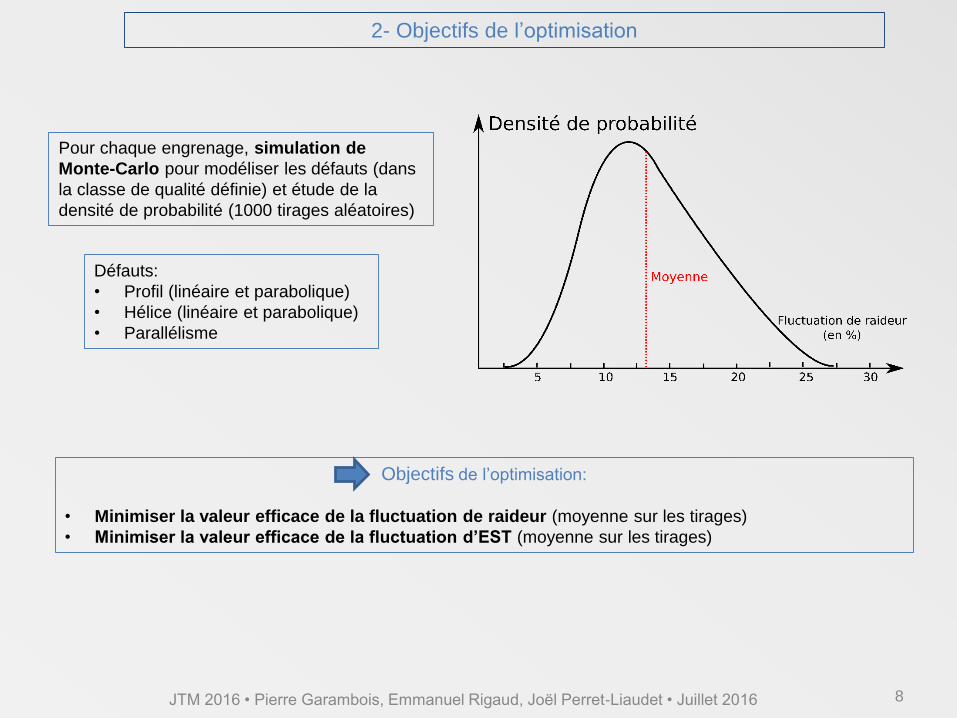
2- Objectifs de l’optimisation
Pour chaque engrenage, simulation de
Monte-Carlo pour modéliser les défauts (dans
la classe de qualité définie) et étude de la
densité de probabilité (1000 tirages aléatoires)
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
Objectifs de l’optimisation:
• Minimiser la valeur efficace de la fluctuation de raideur (moyenne sur les tirages)
• Minimiser la valeur efficace de la fluctuation d’EST (moyenne sur les tirages)
Défauts:
• Profil (linéaire et parabolique)
• Hélice (linéaire et parabolique)
• Parallélisme
9
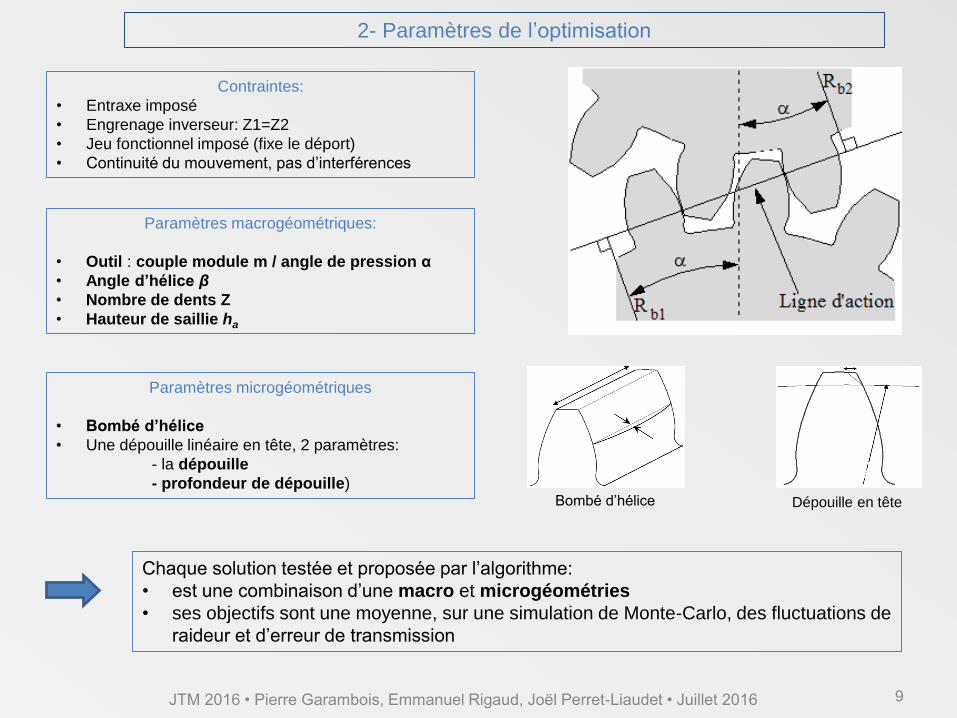
2- Paramètres de l’optimisation
Paramètres macrogéométriques:
• Outil : couple module m / angle de pression α
• Angle d’hélice β
• Nombre de dents Z
• Hauteur de saillie ha
Paramètres microgéométriques
• Bombé d’hélice
• Une dépouille linéaire en tête, 2 paramètres:
- la dépouille
- profondeur de dépouille)
Chaque solution testée et proposée par l’algorithme:
• est une combinaison d’une macro et microgéométries
• ses objectifs sont une moyenne, sur une simulation de Monte-Carlo, des fluctuations de
raideur et d’erreur de transmission
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
Contraintes:
• Entraxe imposé
• Engrenage inverseur: Z1=Z2
• Jeu fonctionnel imposé (fixe le déport)
• Continuité du mouvement, pas d’interférences
Bombé d’hélice Dépouille en tête
10
3- Modèle analytique associé de flexion de dent
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
11
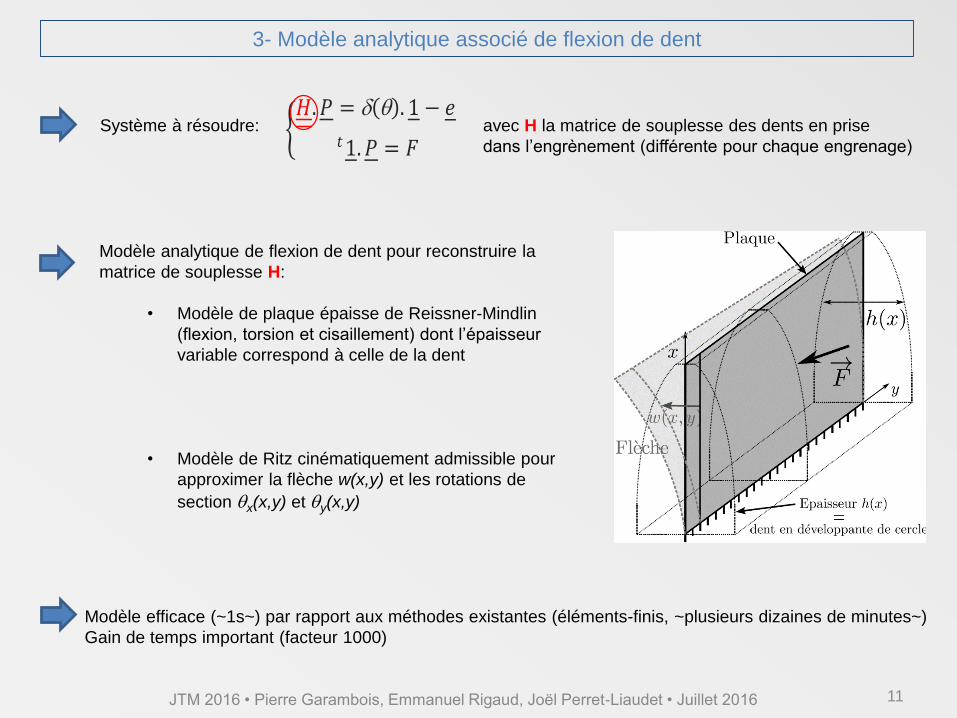
3- Modèle analytique associé de flexion de dent
𝐻.𝑃 = . 1 − 𝑒
𝑡1.𝑃 = 𝐹 Système à résoudre: avec H la matrice de souplesse des dents en prise
dans l’engrènement (différente pour chaque engrenage)
Modèle analytique de flexion de dent pour reconstruire la
matrice de souplesse H:
• Modèle de plaque épaisse de Reissner-Mindlin
(flexion, torsion et cisaillement) dont l’épaisseur
variable correspond à celle de la dent
• Modèle de Ritz cinématiquement admissible pour
approximer la flèche w(x,y) et les rotations de
section x(x,y) et y(x,y)
Modèle efficace (~1s~) par rapport aux méthodes existantes (éléments-finis, ~plusieurs dizaines de minutes~)
Gain de temps important (facteur 1000)
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
12
4- Algorithme génétique d’optimisation
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
13
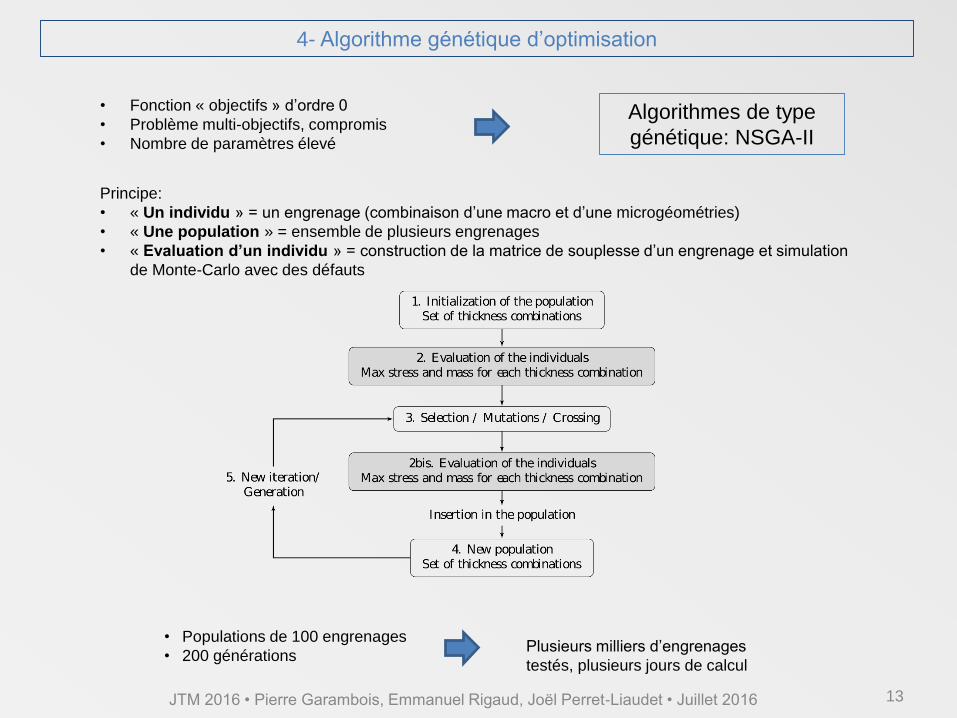
4- Algorithme génétique d’optimisation
• Fonction « objectifs » d’ordre 0
• Problème multi-objectifs, compromis
• Nombre de paramètres élevé
Algorithmes de type
génétique: NSGA-II
Principe:
• « Un individu » = un engrenage (combinaison d’une macro et d’une microgéométries)
• « Une population » = ensemble de plusieurs engrenages
• « Evaluation d’un individu » = construction de la matrice de souplesse d’un engrenage et simulation
de Monte-Carlo avec des défauts
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
• Populations de 100 engrenages
• 200 générationsPlusieurs milliers d’engrenages
testés, plusieurs jours de calcul
14
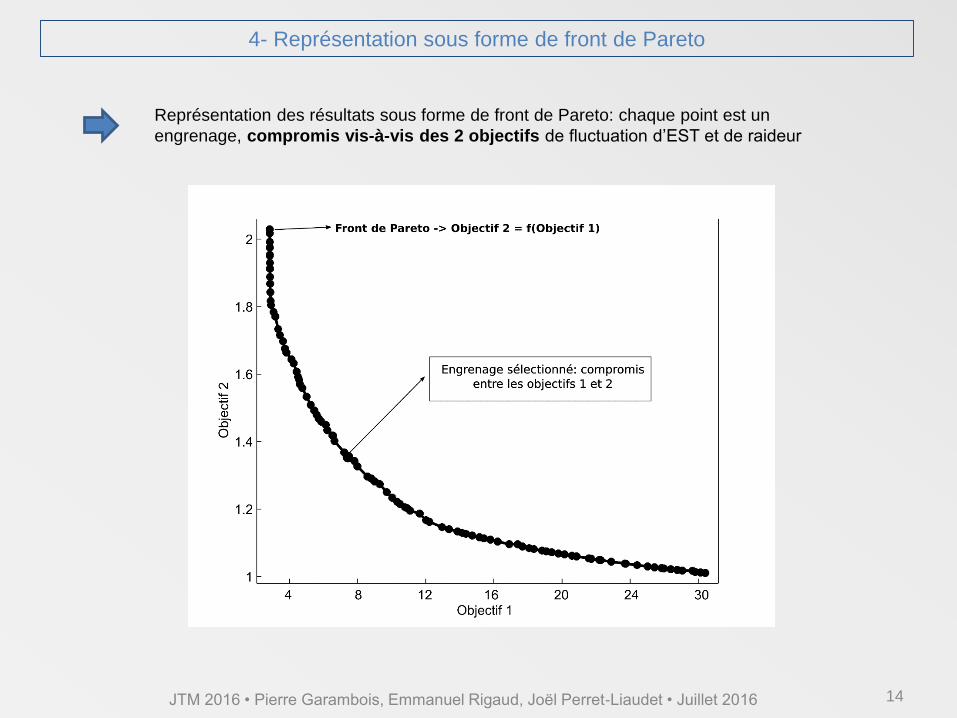
4- Représentation sous forme de front de Pareto
Représentation des résultats sous forme de front de Pareto: chaque point est un
engrenage, compromis vis-à-vis des 2 objectifs de fluctuation d’EST et de raideur
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
15
5- Résultats de l’optimisation
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
16
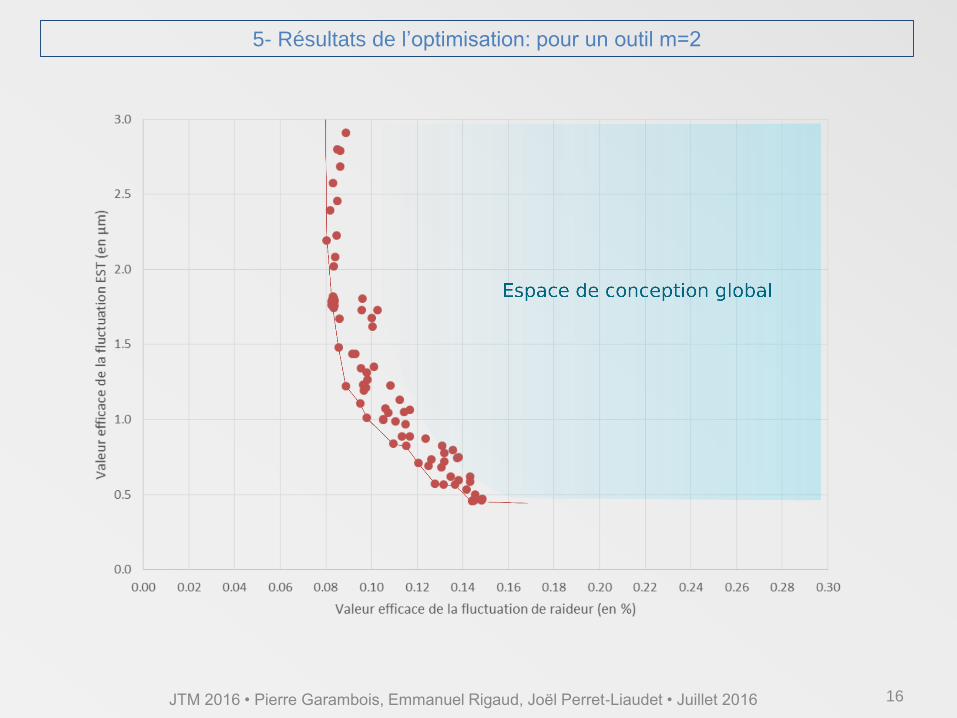
5- Résultats de l’optimisation: pour un outil m=2
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016

17
5- Résultats de l’optimisation: pour un outil m=2
0.000
0.500
1.000
1.500
2.000
2.500
3.000
0.000 0.025 0.050 0.075 0.100 0.125 0.150 0.175
Val
eur
effi
cace
de
la f
luct
uat
ion
d’E
ST (
en µ
m)
Valeur efficace de la fluctuation de raideur (en %)
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
Données Macro-géométriques Données micro-géométriques Objectifs (moyenne sur 1000 tirages)
Module Angle Pres. Nb dentsCoeff Déport Angle Hélice Coeff Saillie Bombé hél Dép. Prof Dép. RMS Fluct Raideur RMS Fluct EST
(mm) (°) (°) (μm) (μm) (mm) (ramenée à la moy) NUM CAS
2 20 19 -0.036 5 0.590 0 0 0.000 0.083 1.741 15
2 20 18 0.408 10 0.688 5 0 0.000 0.086 1.670 7
2 20 17 0.521 20 0.795 0 5 0.409 0.093 1.439 9
2 20 16 0.804 25 0.903 0 5 0.431 0.105 0.997 8
18
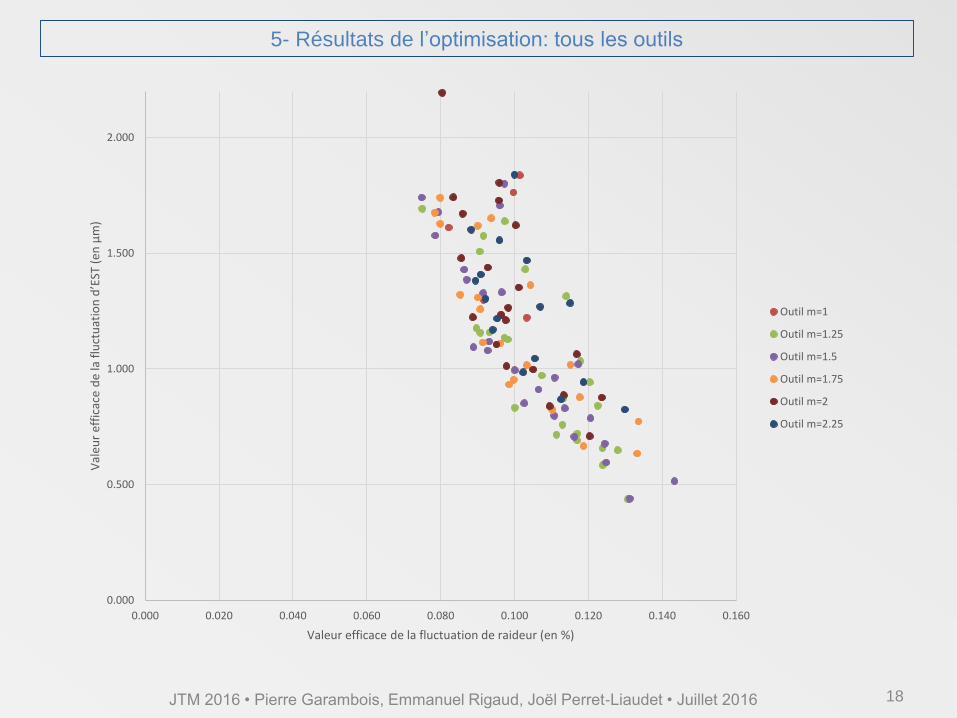
5- Résultats de l’optimisation: tous les outils
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
0.000
0.500
1.000
1.500
2.000
0.000 0.020 0.040 0.060 0.080 0.100 0.120 0.140 0.160
Val
eur
effi
cace
de
la f
luct
uat
ion
d’E
ST (
en µ
m)
Valeur efficace de la fluctuation de raideur (en %)
Outil m=1
Outil m=1.25
Outil m=1.5
Outil m=1.75
Outil m=2
Outil m=2.25

19
Conclusions et perspectives
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016

20
Conclusions et perspectives
Modèle analytique de flexion de dent:
• Modèle de plaque épaisses couplé à un modèle de Ritz
• Gain de temps de calcul d’EST (facteur 1000)
Procédure d’optimisation robuste:
• Génération aléatoire d’un engrenage
• Paramètres à la fois macro et microgéométriques
• Objectifs de fluctuation de raideur et d’EST avec prise en compte de la robustesse
aux défauts
• Résultats variés: outil d’aide à la décision pour l’utilisateur
JTM 2016 • Pierre Garambois, Emmanuel Rigaud, Joël Perret-Liaudet • Juillet 2016
Perspectives
Fabrication de prototypes dans le cadre du FUI ARPE pour la Pfeiffer Vacuum