optimization of fuzzy controller parameter by using …ijesta.com/upcomingissue/08.03.2016.pdfvolume...
TRANSCRIPT

Volume 02, No. 3, March 2016
Pa
ge5
3
Optimization of Fuzzy Controller Parameter by Using
A Firefly Algorithm
Soumya Chauhan
Department of Electrical Engineering, Deenbandhu Chhotu Ram University of Science and Technology,
Murthal, Sonepat (Haryana) India
ABSTRACT:
Firefly Algorithm (FA) is one of the latest nature-inspired algorithms. Finding the best global
optimal point, speed up the convergence by tuning the FA parameters and the ability of
dealing with multimodality are some merits of FA. In this paper, FA is applied to tune
optimal fuzzy parameters for FLC which are used in plant for liquid level and temperature
control. MATLAB/ Simulink program has been used to achieve the optimal parameters of the
membership functions. The results show clearly that the optimized FLC using FA has better
performance compared to manually adjustments of the system parameters for different
datasets.
KEYWORDS: Firefly algorithm, Fuzzy logic controller, Particle swarm optimization,
1. INTRODUCTION
FLC is a popular technique that has been increasing interest in the past decades since it has a
linguistic based structure and its performance is quite robust for nonlinear system, complex
systems or system whose mathematical model is not known. However, FLC including some
parameters such as linguistic control rules and limits and type of membership functions has
to be tuned for a given system. A major drawback of FLC is that the tuning process becomes
more difficult and very time consuming when the number of the system inputs and outputs
is increased. Evolutionary algorithms regarding tuning the membership function parameters
of FLC have been studied extensively in the literature. These studies can be divided into
three groups as genetic algorithm [5], PSO [3,13], and cuckoo algorithm [20, 21]. In many
industrial processes, control of liquid level is required. Several researchers have investigated
the problem of controlling liquid flow [22–28]. A constrained predictive control algorithm
based on feedback linearization applied to a coupled tank apparatus is given in [29]. In [30],
several sliding mode control schemes for the coupled tanks system and liquid level control
are proposed. Fuzzy logic is as a powerful problem-solving methodology with a great
number of applications in level control. Intelligent control including fuzzy control [31–36],
neural network control [37], and genetic algorithms [5] has also been applied to liquid level
system. Water level control is highly important in industrial applications such as boilers in
nuclear power plants. In many industrial processes, control of liquid level and temperature
control is required for e.g., in water purification systems; boilers; industrial chemical
processing and automatic liquid dispensing .The typical actuators used in liquid level control
and temperature control systems include pumps, stepper motor, on-off valves, etc.
stabilizing the water level of a plant around a predetermined level is an important problem
since dynamics of coupled system some amount of delay which can be increased by delay.
The right choice of an optimization algorithm can be crucially important in finding the right

Volume 02, No. 3, March 2016
Pa
ge5
4
solutions for a given optimization problem. There exist a diverse range of algorithms for
optimization.
Firefly Algorithm (FA) is one of the latest nature-inspired algorithms. Finding the best
global optimal point, speed up the convergence by tuning the FA parameters and the ability
of dealing with multimodality are some merits of FA[39]. Fireflies cover the search space by
random and information based steps which present two random search and local search to
the algorithm respectively which conveys exploration and exploitation in firefly algorithm
[33]. But, important point in firefly algorithm is keeping balance between exploration and
exploitation. In standard firefly algorithm, controlling parameters of these two kinds of
searches are initialized at the beginning and these values don‘t change until end of the
searching process and this cannot indicate proper balance between these two kinds of
searches considering different conditions that algorithm will be faced in different steps of
solving problem. Therefore, we have used a fuzzy controller for tuning the parameters
which control balance between random search and local search dynamically in each step of
solving problem (with considering progress of solving problem). This method increases
performance of the firefly algorithm in finding optimal solution by keeping balance between
these two kinds of searches. We have used the proposed method for optimization of fuzzy
controller parameters for a temperature and water level system.
In this paper, fuzzy controller (Mamdani type) to control of liquid level and temperature in
tanks are used. We present optimization of Mamdani-type fuzzy regulator parameters using
FA. MATLAB software is used for designing and simulating. This paper is organized as
follows. In Section2, system model is presented. In Section3, the controller design based on
Mamdani system is given. In Section4, Simulink model is presented. In Section5,FA is
described. Finally, the results, conclusion and future direction are illustrated.
II. GENERAL FORMULATION OF THE SYSTEM MODEL OF LIQUID LEVEL
AND TEMPERATURE
1. System Model for Level
The tank system [1-2] is shown in Fig. 1
Fig. 1: Schematic diagram of coupled tank system
By applying the laws of physics to get a mathematical model of the system to become the
dynamic equation of the system, as in equations (1)&(2).
Volume 02, No. 3, March 2016
Pa
ge5
5
= (1)
= - (2)
Where:
F =steady-state liquid flow rate, c /sec.
F = out flow rate from first tank, c /sec.
= out flow rate from second tank, cm3/sec.
And = coefficients, c /sec.
( = level first tank, cm. = level second tank, cm).
=the cross sectional area for first tank, c .
=the cross sectional area for second tank, c
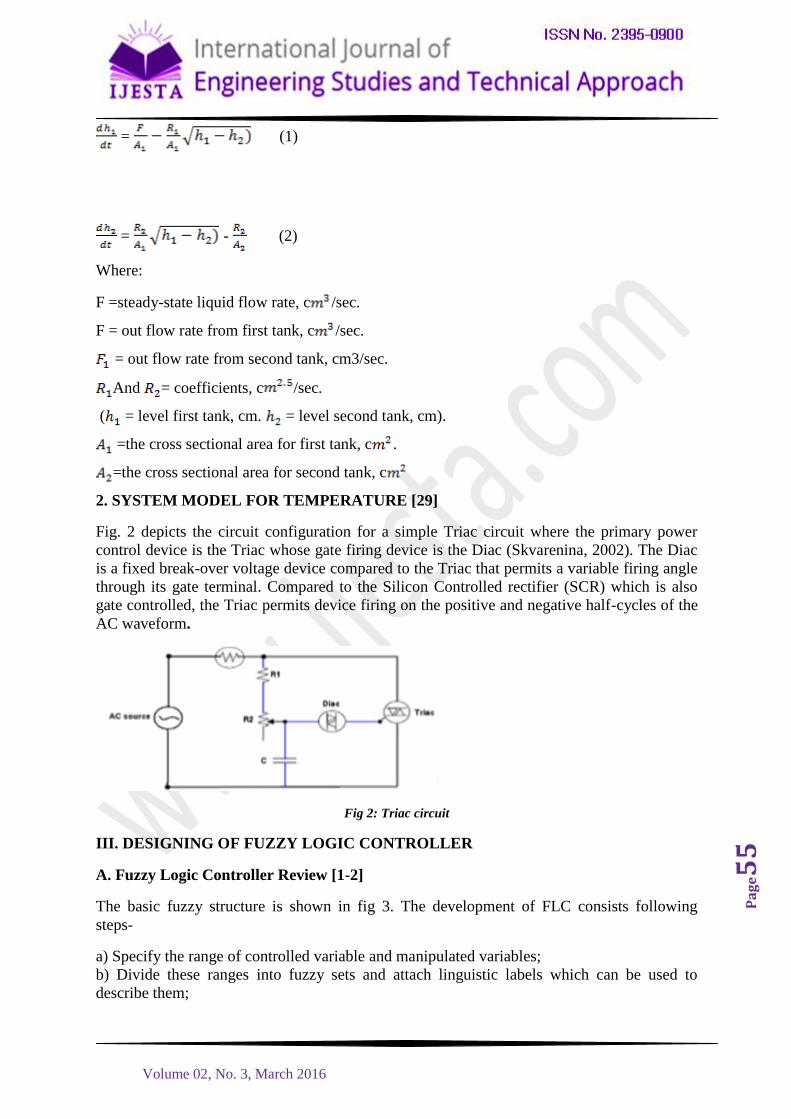
2. SYSTEM MODEL FOR TEMPERATURE [29]
Fig. 2 depicts the circuit configuration for a simple Triac circuit where the primary power
control device is the Triac whose gate firing device is the Diac (Skvarenina, 2002). The Diac
is a fixed break-over voltage device compared to the Triac that permits a variable firing angle
through its gate terminal. Compared to the Silicon Controlled rectifier (SCR) which is also
gate controlled, the Triac permits device firing on the positive and negative half-cycles of the
AC waveform.
Fig 2: Triac circuit
III. DESIGNING OF FUZZY LOGIC CONTROLLER
A. Fuzzy Logic Controller Review [1-2]
The basic fuzzy structure is shown in fig 3. The development of FLC consists following
steps-
a) Specify the range of controlled variable and manipulated variables;
b) Divide these ranges into fuzzy sets and attach linguistic labels which can be used to
describe them;
Volume 02, No. 3, March 2016
Pa
ge5
6
c) Determine the rule base to specify control action;
d) Application of suitable defuzzification method.
The number of necessary fuzzy sets and their ranges were designed based upon the
experience gained on the process. The standard fuzzy set consists of three stages:
Fuzzification, Decision- Making Logic and Defuzzification.
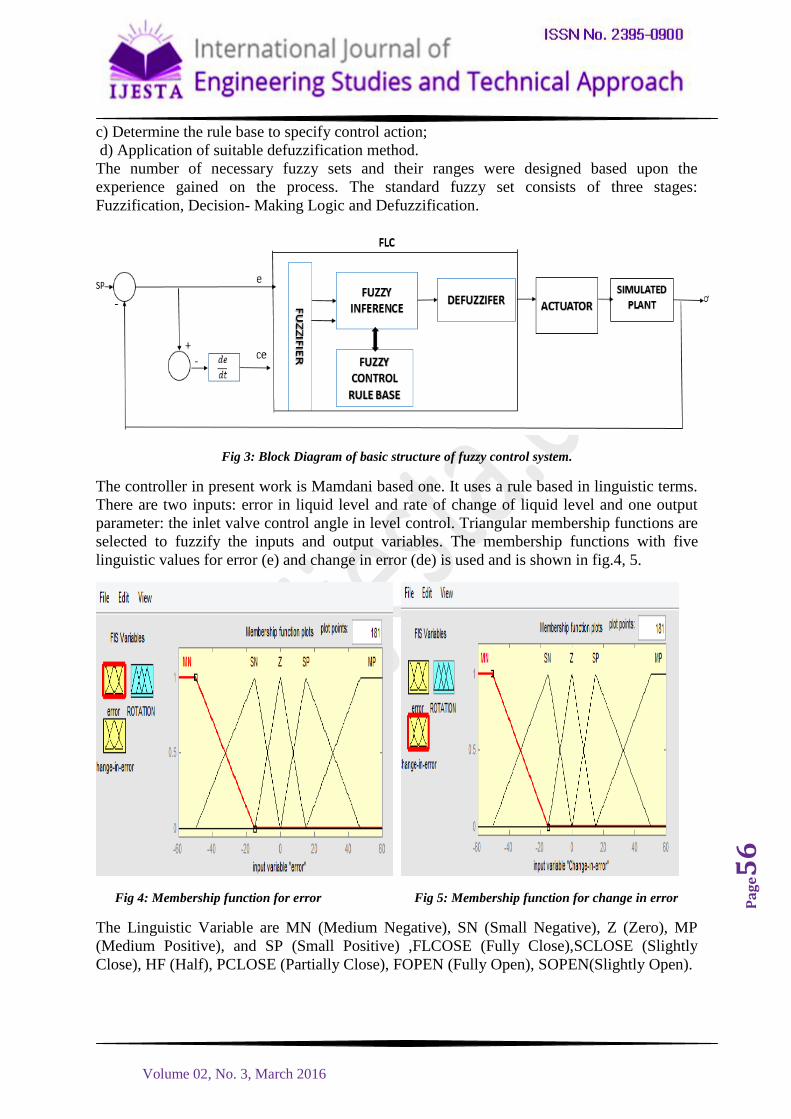
Fig 3: Block Diagram of basic structure of fuzzy control system.
The controller in present work is Mamdani based one. It uses a rule based in linguistic terms.
There are two inputs: error in liquid level and rate of change of liquid level and one output
parameter: the inlet valve control angle in level control. Triangular membership functions are
selected to fuzzify the inputs and output variables. The membership functions with five
linguistic values for error (e) and change in error (de) is used and is shown in fig.4, 5.
Fig 4: Membership function for error Fig 5: Membership function for change in error
The Linguistic Variable are MN (Medium Negative), SN (Small Negative), Z (Zero), MP
(Medium Positive), and SP (Small Positive) ,FLCOSE (Fully Close),SCLOSE (Slightly
Close), HF (Half), PCLOSE (Partially Close), FOPEN (Fully Open), SOPEN(Slightly Open).
Volume 02, No. 3, March 2016
Pa
ge5
7
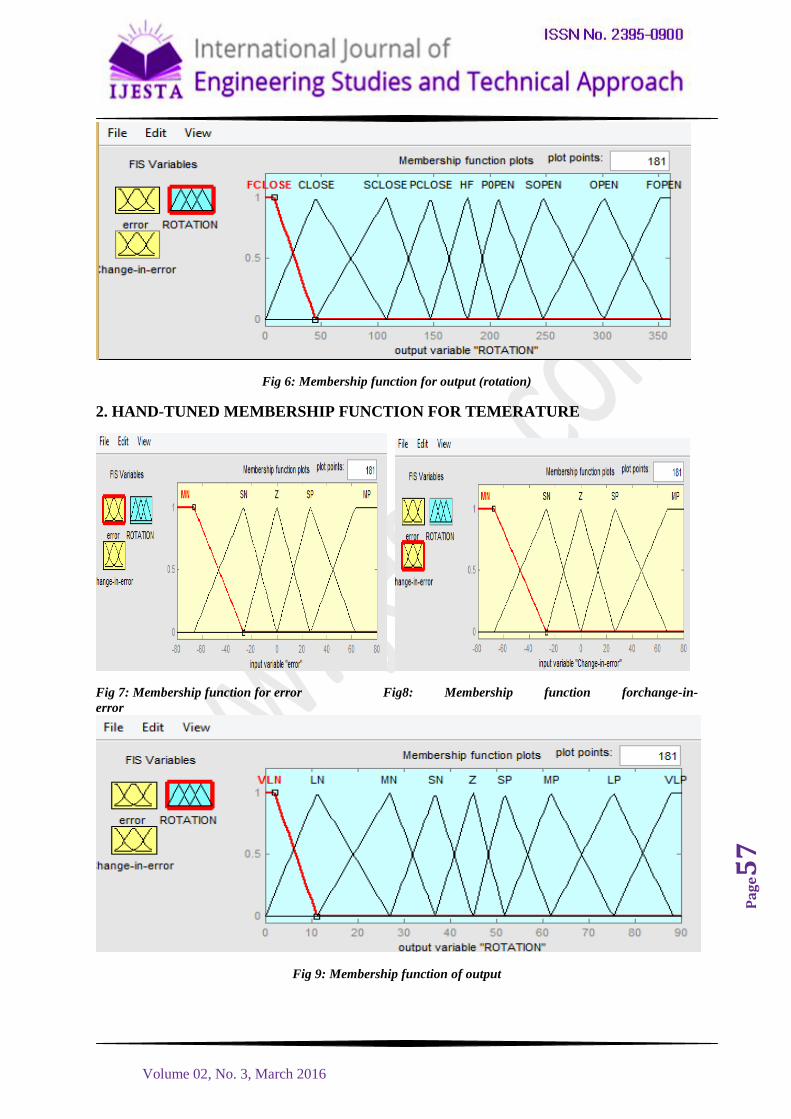
Fig 6: Membership function for output (rotation)
2. HAND-TUNED MEMBERSHIP FUNCTION FOR TEMERATURE
Fig 7: Membership function for error Fig8: Membership function forchange-in-
error
Fig 9: Membership function of output
Volume 02, No. 3, March 2016
Pa
ge5
8
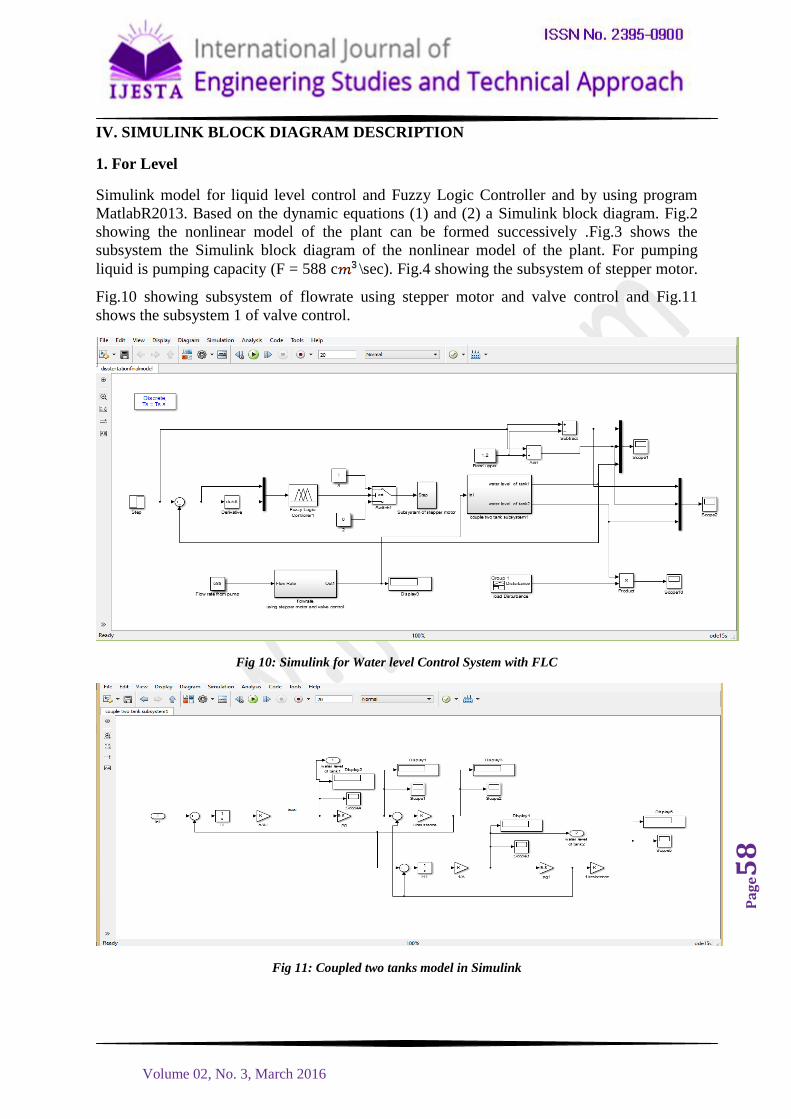
IV. SIMULINK BLOCK DIAGRAM DESCRIPTION
1. For Level
Simulink model for liquid level control and Fuzzy Logic Controller and by using program
MatlabR2013. Based on the dynamic equations (1) and (2) a Simulink block diagram. Fig.2
showing the nonlinear model of the plant can be formed successively .Fig.3 shows the
subsystem the Simulink block diagram of the nonlinear model of the plant. For pumping
liquid is pumping capacity (F = 588 c \sec). Fig.4 showing the subsystem of stepper motor.
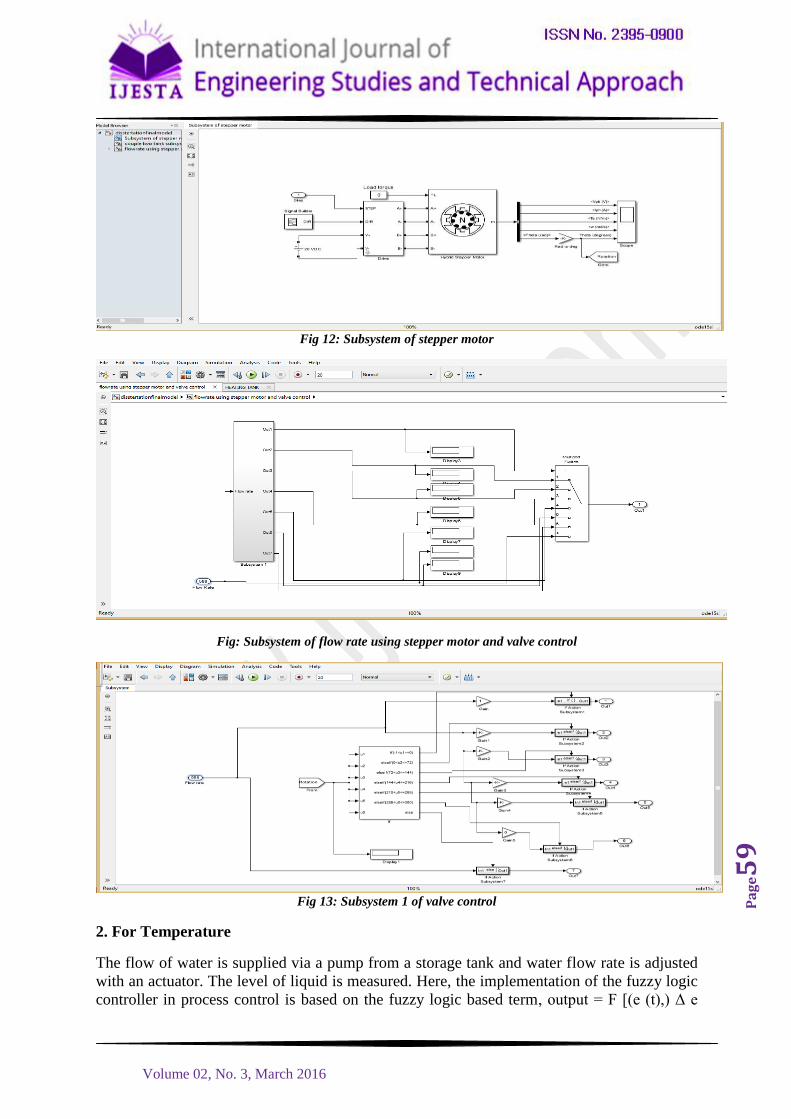
Fig.10 showing subsystem of flowrate using stepper motor and valve control and Fig.11
shows the subsystem 1 of valve control.
Fig 10: Simulink for Water level Control System with FLC
Fig 11: Coupled two tanks model in Simulink
Volume 02, No. 3, March 2016
Pa
ge5
9
Fig 12: Subsystem of stepper motor
Fig: Subsystem of flow rate using stepper motor and valve control
Fig 13: Subsystem 1 of valve control
2. For Temperature
The flow of water is supplied via a pump from a storage tank and water flow rate is adjusted
with an actuator. The level of liquid is measured. Here, the implementation of the fuzzy logic
controller in process control is based on the fuzzy logic based term, output = F [(e (t),) Δ e

Volume 02, No. 3, March 2016
Pa
ge6
0
(t)]. In this the fuzzy sets e (t) (Temperature error) and de (t) (Change in temperature error)
acts as the input. And the output is a firing angle which lies in the interval of [ ]. Here
through fuzzy output, get the firing angle which triggers the triac. Then fuzzy is further
connected with triac circuit and through this firing angle calculate the value of TRAIC
voltage (load voltage) from this formula(1).
V=f ( (1)
V=triac voltage
f ( = function of firing angle
Through this triac voltage, we have to calculate (Rms voltage) from TRIAC circuit.
Then, the value of will be put in the formula of power which is shown in formula (2)
P= (2)
In this formula, the value of R will be taken as a constant value. And the changes
according to the firing angle. The value of power will put in this formula (3) to get rise in
temperature ( =100 ) which is shown in formula (3)
(3)
, P= power, t= time, density=1,
Fig 14: Simulink model of Temperature Control

Volume 02, No. 3, March 2016
Pa
ge6
1
Fig 15: Subsystem 1 of AC source and measuring unit
Fig 16: Subsystem 2 of measuring unit
Fig 17: Subsystem 3 of measuring unit

Volume 02, No. 3, March 2016
Pa
ge6
2
Fig 18: subsystem 4 of triac
Fig 19: Subsystem 5 of rise in temperature
V. FIREFLY OPTIMZATION ALGORITHM (FA)
In the firefly algorithm, the flashing light of fireflies is an amazing sight in the summer sky in
the tropical and temperate regions. There are about two thousand firefly species, and roost
fireflies produce short and rhythmic flashes. The pattern of flashes is often unique for a
particular species. The flashing light is produced by a process of bioluminescence, and the
true functions of such signaling system are still being debated. However, two fundamental
functions of such flashes are to attract mating partners (communication), and to attract
potential prey. In addition, flashing may also servo as a protective warning mechanism to
remind potential predators of the bitter taste of fireflies. The rhythmic flash, the rate of
flashing and the amount of time form part of the signal system that brings both sexes
together. Females respond to a male‘s unique pattern of flashing pattern of other species
while in some species such as photuris, female fireflies can eavesdrop on the bioluminescent
courtship signals and even mimic the mating flashing pattern of other species so as to lure
and eat the male fireflies who may mistake the flashes as a potential suitable mate. Some
Volume 02, No. 3, March 2016
Pa
ge6
3
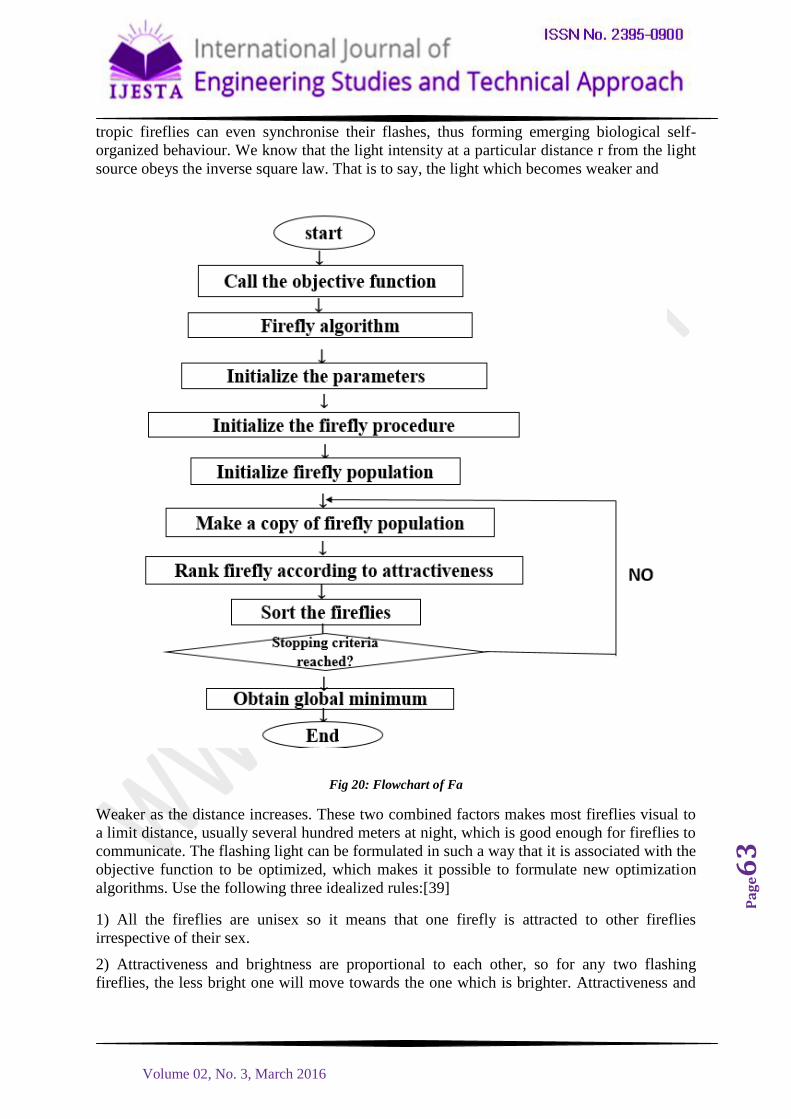
tropic fireflies can even synchronise their flashes, thus forming emerging biological self-
organized behaviour. We know that the light intensity at a particular distance r from the light
source obeys the inverse square law. That is to say, the light which becomes weaker and
Fig 20: Flowchart of Fa
Weaker as the distance increases. These two combined factors makes most fireflies visual to
a limit distance, usually several hundred meters at night, which is good enough for fireflies to
communicate. The flashing light can be formulated in such a way that it is associated with the
objective function to be optimized, which makes it possible to formulate new optimization
algorithms. Use the following three idealized rules:[39]
1) All the fireflies are unisex so it means that one firefly is attracted to other fireflies
irrespective of their sex.
2) Attractiveness and brightness are proportional to each other, so for any two flashing
fireflies, the less bright one will move towards the one which is brighter. Attractiveness and
Volume 02, No. 3, March 2016
Pa
ge6
4
brightness both decrease as their distance increases. If there no one brighter than other firefly,
it will move randomly.
3) The brightness of a firefly is determined by the view of the objective function.
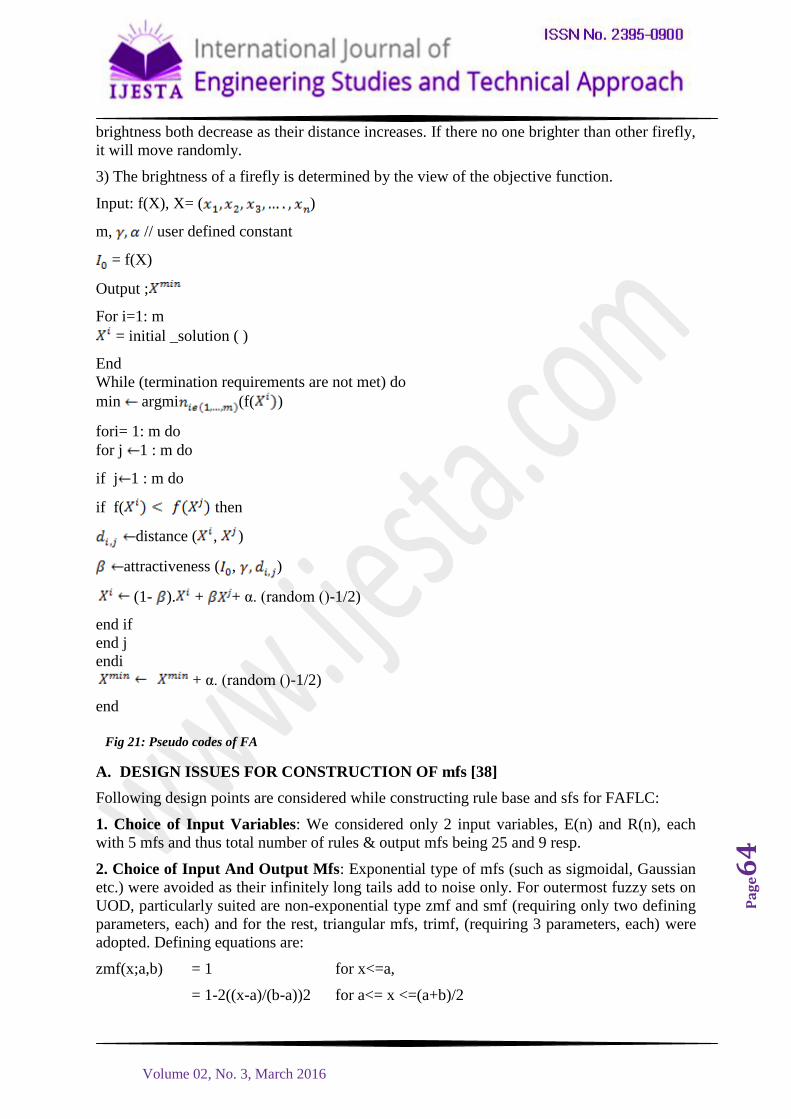
Input: f(X), X= ( )
m, // user defined constant
= f(X)
Output ;
For i=1: m
= initial _solution ( )
End
While (termination requirements are not met) do
min argmi (f( )
fori= 1: m do
for j 1 : m do
if j 1 : m do
if f( then
distance ( , )
attractiveness ( , )
(1- ). + + α. (random ()-1/2)
end if
end j
endi
+ α. (random ()-1/2)
end
Fig 21: Pseudo codes of FA
A. DESIGN ISSUES FOR CONSTRUCTION OF mfs [38]
Following design points are considered while constructing rule base and sfs for FAFLC:
1. Choice of Input Variables: We considered only 2 input variables, E(n) and R(n), each
with 5 mfs and thus total number of rules & output mfs being 25 and 9 resp.
2. Choice of Input And Output Mfs: Exponential type of mfs (such as sigmoidal, Gaussian
etc.) were avoided as their infinitely long tails add to noise only. For outermost fuzzy sets on
UOD, particularly suited are non-exponential type zmf and smf (requiring only two defining
parameters, each) and for the rest, triangular mfs, trimf, (requiring 3 parameters, each) were
adopted. Defining equations are:
zmf(x;a,b) = 1 for x<=a,
= 1-2((x-a)/(b-a))2 for a<= x <=(a+b)/2

Volume 02, No. 3, March 2016
Pa
ge6
5
= 2((x-b)/(b-a))2 for (a+b)/2 <= x <= b
= 0 for x >=b.
where parameters a and b locate extremes of sloped portion of curve.
smf(x;a,b) = 1 – zmf(x;a,b)
trimf(x;a,b) = max(min((x-a)/(b-a), (c-x)/(c-b)), 0)
where a,b,c respectively locate start, peak and end points.
B. DESIGN OF ADAPTIVE FITNESS FUNCTION
A performance criterion such as ISE is although quite general but has disadvantage of being
unable to distinguish between persisting errors (even though well within tolerance band) and
initial sluggishness. To cover more facets of time-response, a synthetic, more comprehensive
fitness-function as follows is adopted:
Fitness-function= (w1+w2+w3+w4)/ (w1*ISE +w2*Mp+w3*tr+ w4*ts) (1)
where w1,…,w4 are user-settable weights (free-parameters) to lay emphasis on different
facets of response. Design of such a comprehensive fitness function needs much more
attention in case FA-FLC is to operate at SPC. We considered following points in its design:
i) In synthesizing a comprehensive fitness function for a FA meant to tune an FLC
operating at SPC, one cannot be oblivious of numerical properties/ scale of different factors
constituting the fitness function. For instance, at higher SPCs, ISE can get numerically too
dominant over Mp, tr and ts, so static chosen weights can mean that ISE is getting the tilt in
its favour, totally eclipsing other performance indices. In other words, firefly good on all
other accounts (viz. Mp, tr and ts) will keep on getting superseded by firefly poor on these
accounts but dominant merely on account of ISE. We, therefore, felt a need to adapt fitness
function by choosing weight w1 as follows: w1 = 0.2/(SPC)2.
ii) Values of w3 and w4 were held constant at 0.5 and 2 respectively, as these indices are
relatively independent of SPC; latter weight is kept much higher as ts is generally more
crucial than tr.
iii) w2 is adapted as follows depending upon whether Mp is within tolerance band (normal
weight) or Mp exceeds it (heavily de-weighted):
If (Mp>0.05*abs(SPC)),
w2 =0.1/abs(SPC);
else w2 = 0.5/sqrt(abs(SPC)
VI. EXPERIMENTAL RESULTS
In this section results of experiments and simulations will be presented. We have solved the
problem of tuning of fuzzy controller parameters for water level and temperature control by
using firefly algorithm which provides desired solution using MATLAB. Fig 5.3 shows the
response of fuzzy controller of water level of tank 2 under simulation environment. The
controller stabilizes the desired water level very quickly.
Volume 02, No. 3, March 2016
Pa
ge6
6
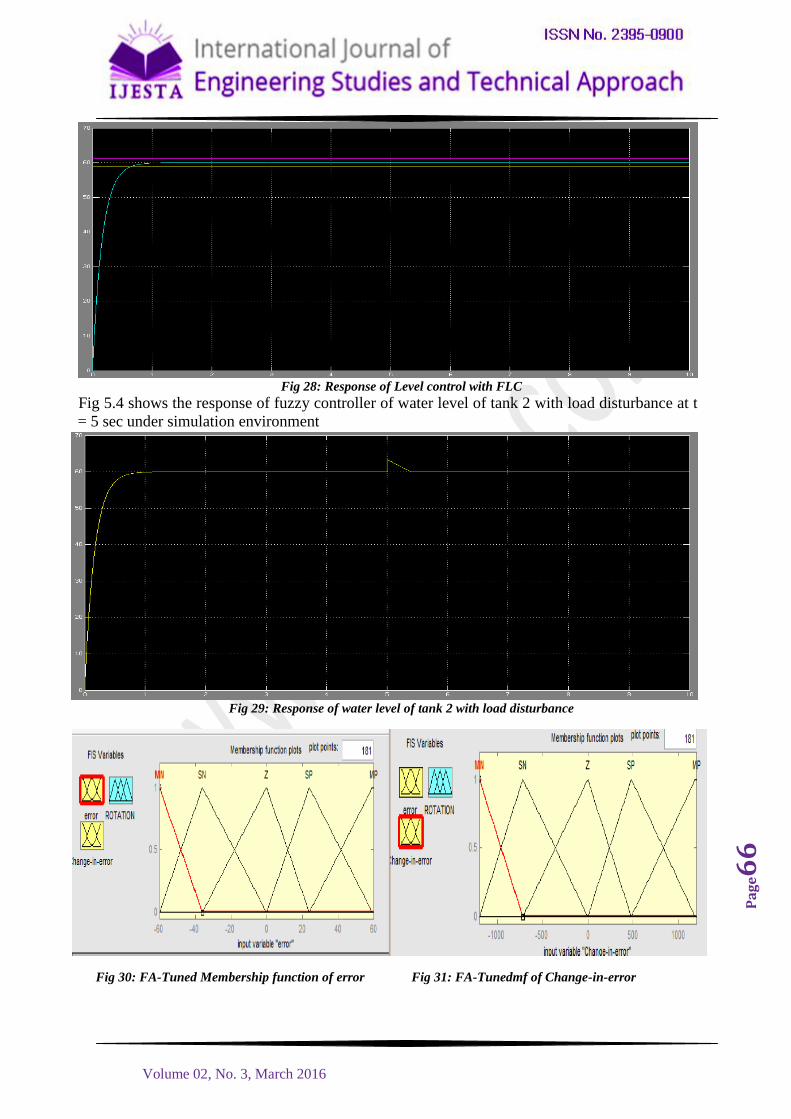
Fig 28: Response of Level control with FLC
Fig 5.4 shows the response of fuzzy controller of water level of tank 2 with load disturbance at t
= 5 sec under simulation environment
Fig 29: Response of water level of tank 2 with load disturbance
Fig 30: FA-Tuned Membership function of error Fig 31: FA-Tunedmf of Change-in-error

Volume 02, No. 3, March 2016
Pa
ge6
7
Fig 32: Membership function of Output
Fig 33: Response of water level of tank 2 with FA-FLC
FAFLC: Evolved mfs shown in Fig and correspond to following bestf firefly:
[-60, -36, -60, -36, 0, -36, 0, 24, 0, 24, 59.4, 24, 59.4, -1200, -720, -1200, -720, 0 ,-720,0,
480, 0,480, 1188, 480, 1188, 0,480.0,0,480.0,864,480.0,864,1104, 864, 1104, 1200, 1104,
1200, 1320, 1200, 1320, 1824, 1320, 1824, 2064, 1824, 2064, 2376, 2064, 2376]
Fig 34: Result for FA-FLC for temperature control
Volume 02, No. 3, March 2016
Pa
ge6
8
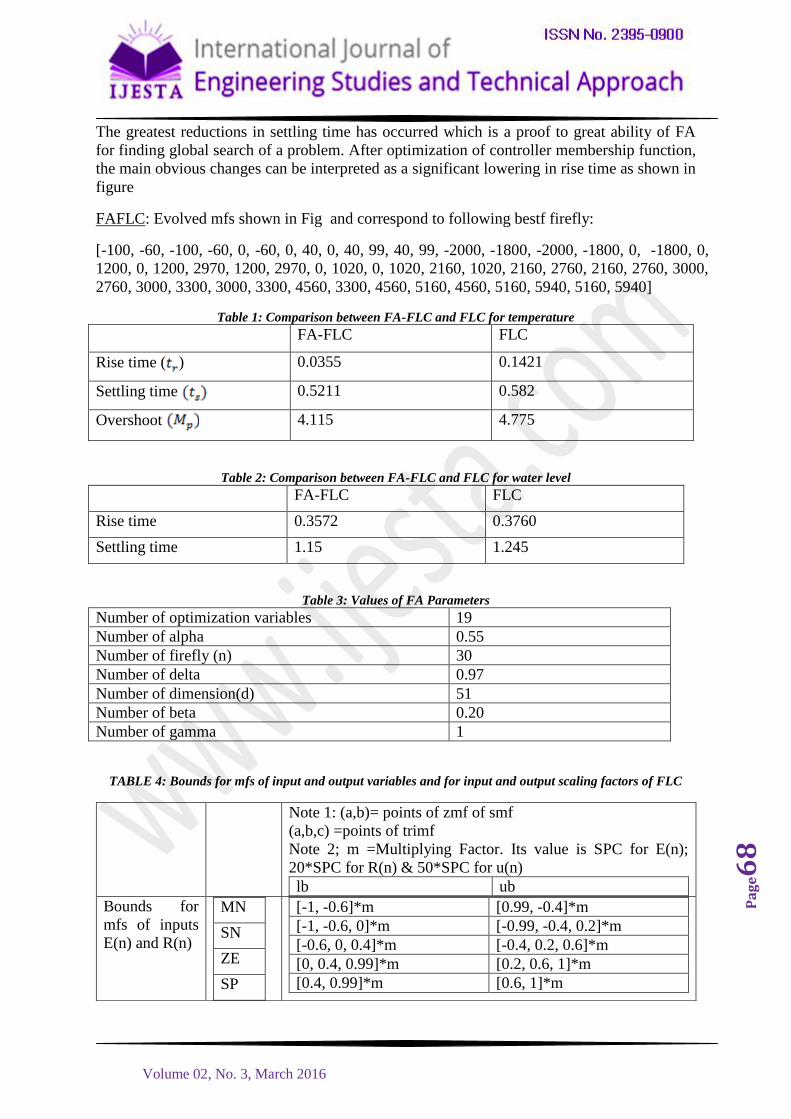
The greatest reductions in settling time has occurred which is a proof to great ability of FA
for finding global search of a problem. After optimization of controller membership function,
the main obvious changes can be interpreted as a significant lowering in rise time as shown in
figure
FAFLC: Evolved mfs shown in Fig and correspond to following bestf firefly:
[-100, -60, -100, -60, 0, -60, 0, 40, 0, 40, 99, 40, 99, -2000, -1800, -2000, -1800, 0, -1800, 0,
1200, 0, 1200, 2970, 1200, 2970, 0, 1020, 0, 1020, 2160, 1020, 2160, 2760, 2160, 2760, 3000,
2760, 3000, 3300, 3000, 3300, 4560, 3300, 4560, 5160, 4560, 5160, 5940, 5160, 5940]
Table 1: Comparison between FA-FLC and FLC for temperature
FA-FLC FLC
Rise time ( ) 0.0355 0.1421
Settling time 0.5211 0.582
Overshoot 4.115 4.775
Table 2: Comparison between FA-FLC and FLC for water level
FA-FLC FLC
Rise time 0.3572 0.3760
Settling time 1.15 1.245
Table 3: Values of FA Parameters
Number of optimization variables 19
Number of alpha 0.55
Number of firefly (n) 30
Number of delta 0.97
Number of dimension(d) 51
Number of beta 0.20
Number of gamma 1
TABLE 4: Bounds for mfs of input and output variables and for input and output scaling factors of FLC
Note 1: (a,b)= points of zmf of smf
(a,b,c) =points of trimf
Note 2; m =Multiplying Factor. Its value is SPC for E(n);
20*SPC for R(n) & 50*SPC for u(n)
lb ub
Bounds for
mfs of inputs
E(n) and R(n)
MN
SN
ZE
SP
[-1, -0.6]*m [0.99, -0.4]*m
[-1, -0.6, 0]*m [-0.99, -0.4, 0.2]*m
[-0.6, 0, 0.4]*m [-0.4, 0.2, 0.6]*m
[0, 0.4, 0.99]*m [0.2, 0.6, 1]*m
[0.4, 0.99]*m [0.6, 1]*m

Volume 02, No. 3, March 2016
Pa
ge6
9
V. CONCLUSION AND FUTURE DIRECTION
With a large number of parameters (51 points of mfs for a two-inputs and one-output FLC),
FLC design truly represents a search problem in high-dimensional, multi-modal hyperspace
typically suited for FA. In this work, simulation experimental results on the control of level
and temperature using firefly algorithm have been provided and it has been demonstrated that
FA is an efficient method. FA-FLC outperforms a hand-tuned FLC.
Following new directions can be pursued: (a) adapting FLC for temperature and level control
systems subjected to wide range of set-points. (b) adapting control parameters of FA.
REFERENCES
i. Dharamniwas, Aziz Ahmad, Varun Redhu and Umesh Gupta, ―Liquid Level Control by
Using Fuzzy Logic Controller‖, pp. 537-549, July 2012
ii. Evelia Lizárraga Olivas, Oscar Castillo, Fevrier Valdez and José Soria, ―Ant Colony
Optimization for Membership Function Design for a Water Tank Fuzzy Logic
Controller‖ IEEE Transaction, 2013
iii. Majid Joshani, Rubiyah Yusof, Marzuki Khalid, A. Imam Cahyadi, ―Swarm
Intelligence Based Fuzzy Controller – A Design for Nonlinear Water Level Tank‖,
International Conference on Intelligent Systems Modelling and Simulation, 2012
iv. PROCYK, T. J AND MAMDANI, E. H. ―A Linguistic self-organizing process
controller‖, Automatica, Vol. 15., pp. 15-30,1979
v. B. SUBUDHI AND A. K. SWAIN, ―Optimization of Membership Functions of Fuzzy
Logic Controller for Controlling Liquid Level Using Genetic Algorithm‖, pp.77, Jan.—
Feb. 1997.
vi. Ahmad Hatta bin Abdullah, ―Design and Development of Fuzzy Logic Based Level
Controller‖, UniversitiTeknikal Malaysia Melaka, May 2008
vii. Harshdeep Singh, ―Design of Water Level Controller Using Fuzzy Logic System‖,
National Institute of Technology Rourkela, Department of Mechanical Engineering.
viii. J.S. Saini and Y.P. Singh, ―Use of Causal Knowledge in a Real-time Fuzzy Logic
Controller‖, IEEE Transaction, 1995
MP
Bounds for
mfs of output
u(n)
VLN
LN
MN
SN
ZE
SP
MP
LP
VLP
[0, 0.17]*m [0.1, 0.18]*m
[0, 0.17, 0.36]*m [0.1, 0.20, 0.39]*m
[0.17, 0.36, 0.46]*m [0.20, 0.39, 0.47]*m
[0.36, 0.46, 0.5]*m [0.39, 0.47, 0.57]*m
[0.46, 0.5, 0.55]*m [0.47, 0.57, 0.67]*m
[0.5, 0.55, 0.76]*m [0.57, 0.67, 0.87]*m
[0.55, 0.76, 0.86]*m [0.67, 0.87, 0.99]*m
[0.76, 0.86, 0.99]*m [0.87, 0.99, 1]*m
[0.86, 0.99]*m [0.99, 1]*m
Volume 02, No. 3, March 2016
Pa
ge7
0
ix. W. Tan, ‗Water level control for a nuclear steam generator‘, Nuclear Engineering and
Design, vol.241, pp.1873-1880, 2011
x. A. Shome and D. Ashok, ‗Fuzzy Logic Approach for Boiler Temperature and Water
level Control‘, International Journal of Scientific and Engineering Research, vol.3, pp.
1-6, 2012
xi. O. Safarzadeh, A.Kahki Sedigh and A.S. Shirani, ―Identification and robust water level
Control of horizontal steam generators using quantitative feedback theory‖, Energy
Conversion and Management, vol.52, pp.3103-3111, 2011
xii. M.S Das Gupta, ―Fuzzy and ANN Controller Design and Implementation on a level
control setup‖, UGC National Conference on advances on industrial automation, vol.2,
March 2004.
xiii. Majid Joshani, RubiyahYusof, Marzuki Khalid, A. Imam Cahyadi, ―Swarm Intelligence
Based Fuzzy Controller – A Design for Nonlinear Water Level Tank‖, International
Conference on Intelligent Systems Modelling and Simulation, 2012
xiv. NamrataDey, Ria Mandal, M Monica Subashini, ―Design and Implementation of a
Water Level Controller using Fuzzy Logic‖, International Journal, Vol 5 No 3, Jun-Jul
2013
xv. M.S.M Aras, M.F. Basar, N. Hasim, M.N. Kamaruddin, H.I. Jaafar, ―Development and
Modeling of Water Tank System Using System Identification Method‖ ,International
Journal, Volume-2, August 2013.
xvi. ZHAO Taoyan, LI Ping and CAO Jiangtao, ―Study of Interval Type-2 Fuzzy Controller
for the Twin-tank Water Level System‖,Chinese Journal of Chemical Engineering, Vol.
20, Dec 2012.
xvii. K.Govinda, Sreekar.ch, Sandilya .k, ―Reservoir Water Level Indicator using UM66
Microcontroller‖,International Journal for Scientific Research & Development, Vol. 2,
2014
xviii. Daniel Wu, FakhreddineKarray, Insop Song, ―Water Level Control by Fuzzy Logic and
Neural Networks‖, University of Waterloo
xix. P. Singhala, D. N. Shah, B. Patel, ―Temperature Control using Fuzzy Logic‖,
International Journal of Instrumentation and Control Systems (IJICS) Vol.4, No.1,
January 2014.
xx. Saeed Balochian, EshaghEbrahimi, ―Parameter Optimization via Cuckoo Optimization
Algorithm of Fuzzy Controller for Liquid Level Control‖, Hindawi Publishing
Corporation Journal of Engineering Volume, 2013
xxi. NaaJu Na, Zeugnam Bien, ―A Fuzzy Controller for the Steam Generator Water Level
Control and its Practical Self-Tuning Based on Performance‖, Journal of Korean
nuclear society, vol.27, no.3, 1995.
xxii. SurachaiPanich, ―Development of Fuzzy Controller for Water Level in Stream Boiler
Tank‖, Journal of Computer Science 6 (11): 1233-1236, 2010.
xxiii. ChulHwan Jung, Kee-Choon Kwon, ―A fuzzy controller with a real-time tuning
algorithm and its application to a steam generator water level control‖, Control and
Cybernetics vol. 27, No. 4, 1998.

Volume 02, No. 3, March 2016
Pa
ge7
1
xxiv. Isizoh A. N., Okide S. O, Anazia A.E., Ogu C.D, ―Temperature Control System Using
Fuzzy Logic Technique‖, (IJARAI) International Journal of Advanced Research in
Artificial Intelligence, Vol. 1, No. 3, 2012.
xxv. Seyed Kamaleddin Mousavi Mashhadi, Elham Sareban, Amir Aminian, ―Design Fuzzy
Controller for Synthesis Water Level‖, Journal of mathematics and computer
Science,vol.9 ,2014.
xxvi. P. J. King and E. H. Mamdani, ―The application of fuzzy control systems to industrial
process,‖ Automatica, vol. 13, pp. 235–242, 1977
xxvii. W. J. M. Kickert and H. R. Van Nauta Lemke, ―Application of a fuzzy logic controller
in a warm water plant,‖ Automatica, vol. 12, pp. 301–308, 1976
xxviii. Sven Fagerstrom and Nagy Bengiamin, ―Modelling and Characterization of Power
Electronics Converters Using Matlab Tools‖, vol.1, pp. 133-165, 2012
xxix. Teccor electronics, ―Phase Control Using thyristors,‖ pp 1-9, 2002
xxx. Rabisankar Roy, Susmita Das, Jayanta Kumar Ray, Shreyashi Barat, BiswarupNeogi,
―Automatic Speed Control of Single Phase Induction Motor with the Variation of
Ambient Temperature‖, ISSN 2250-3153,Volume 2, Issue 11, November 2012
xxxi. Disha, Mr.Pawan Kumar Pandey, Rajeev Chugh, ―Simulation of Water Level Control in
a Tank Using Fuzzy Logic‖, ISSN: 2278-1676 Volume 2, Issue 3 ,PP 09-12,Sep-Oct
2012
xxxii. Zaid Abed AljasimMuhasain and Saif Abed AljasimMuhasain, ―Analysis and Design of
Controller for Level Process Control without Sensor‖, (NUCEJ), Vol.13 No.1, pp.84-
97, 2010
xxxiii. Xin-She Yang and Xingshi He, ―Firefly Algorithm : Recent Advances and
Application‖, Int. J. Swarm Intelligence,2013, Vol. 1, No. 1, pp. 36-50.
xxxiv. Adelson Menezes Lima∗, Samequefariascunha De Oliveira, Missilene Da Silvafarias,
Tarcisio Da Silvabarreto, Elmer Rolando Llanos Villarreal, ―Application the control in
tanks using fuzzy theory‖, 2012
xxxv. Aniket B. Kabde, A. Dominic Savio, ―Position Control of Stepping Motor‖,Vol. 3,
Issue 4, April 2014
xxxvi. Vasilija Sarac, ―Application of Matlab/Simulink in hybrid stepper motor modelling‖,
2013
xxxvii. Ahmad Johan Mahbob, MahanijahMd Kamal and FaiezaHanumYahaya, ―Water
Temperature Using Fuzzy Logic‖, IEEE Transaction on CSPA, 2009
xxxviii. J.s. Saini, Dr. M.gopal, Dr. A.P. Mittal, ―Evolving Optimal Fuzzy Logic Controllersby
Genetic Algorithms‖, Volume 50, Issue 3, pp.179-190, 2004
xxxix. X. S. Yang, Nature-Inspired Metaheuristic Algorithm, Luniver Press, Beckington, UK,
2nd edition, 2010
xl. Xin-She Yang and Xingshi He, ―Firefly Algorithm: Recent Advances and Application‖,
Int. J. Swarm Intelligence,2013, Vol. 1, No. 1, pp. 36-50.