oral report rev2
TRANSCRIPT
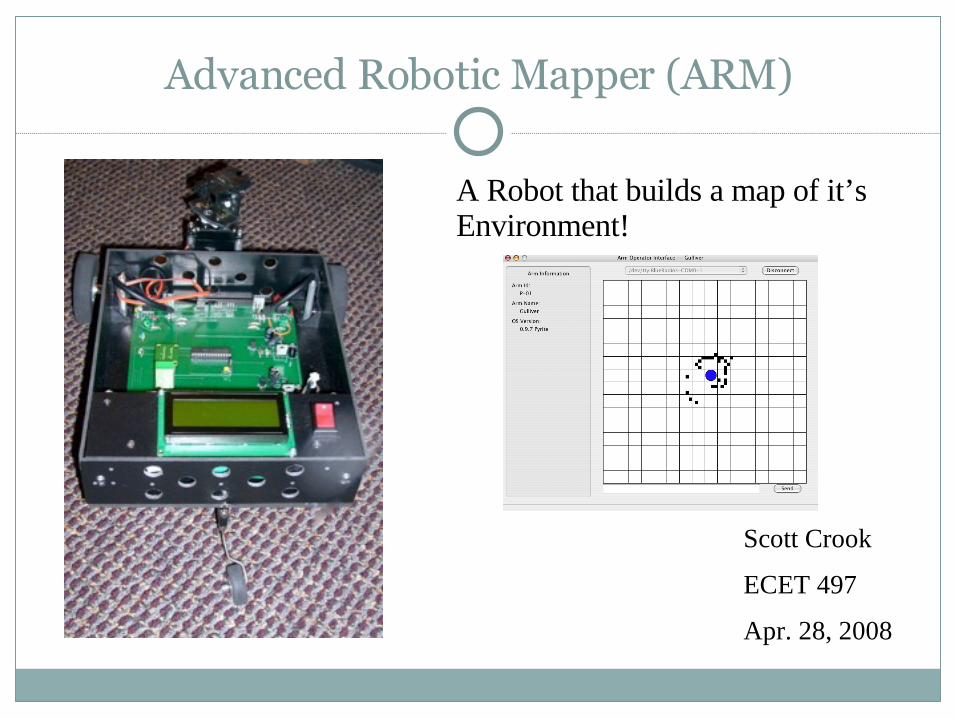
Advanced Robotic Mapper (ARM)
Scott Crook
ECET 497
Apr. 28, 2008
A Robot that builds a map of it’s Environment!
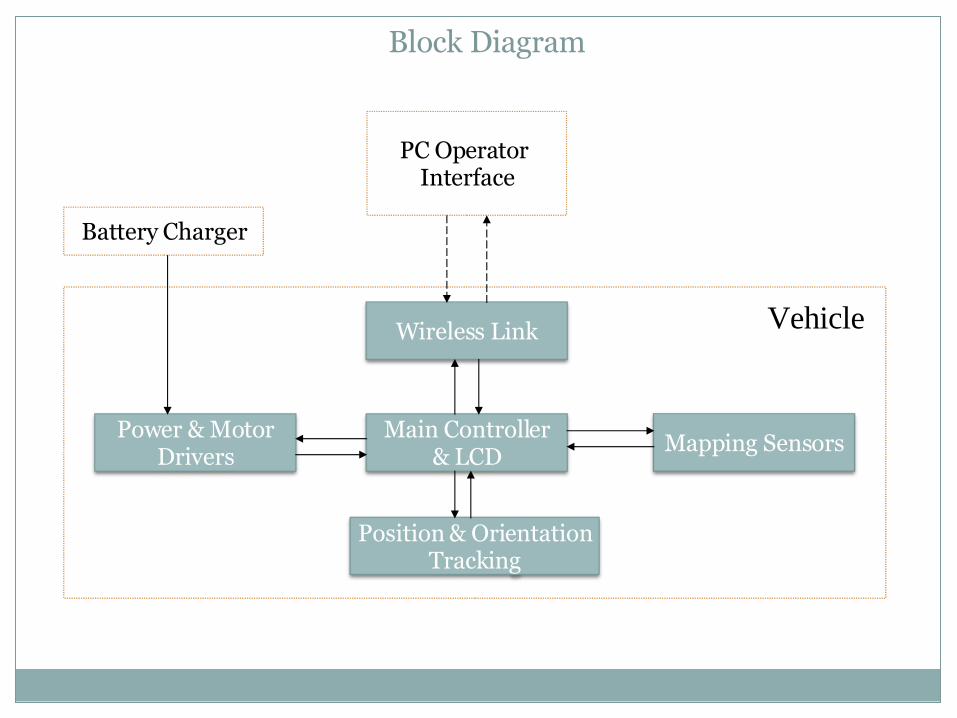
PC Operator Interface
Wireless Link
Battery Charger
Power & MotorDrivers
Mapping SensorsMain Controller
& LCD
Position & OrientationTracking
Vehicle
Block Diagram
Position & Orientation Tracking Block
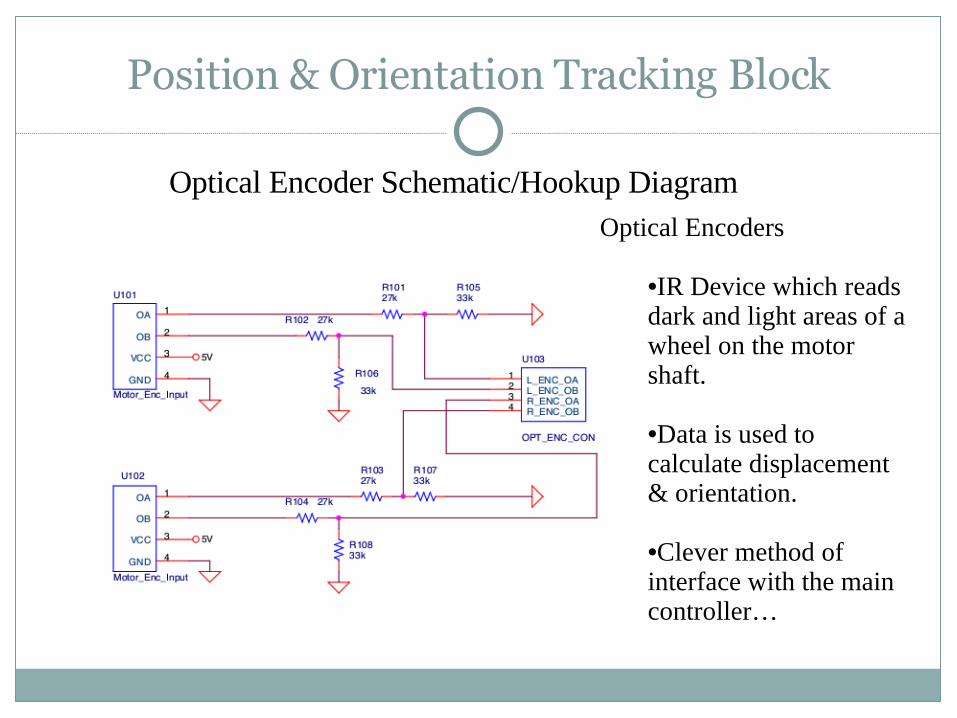
Optical Encoder Schematic/Hookup DiagramOptical Encoders
•IR Device which reads dark and light areas of a wheel on the motor shaft.
•Data is used to calculate displacement & orientation.
•Clever method of interface with the main controller…
Position & Orientation Tracking Block
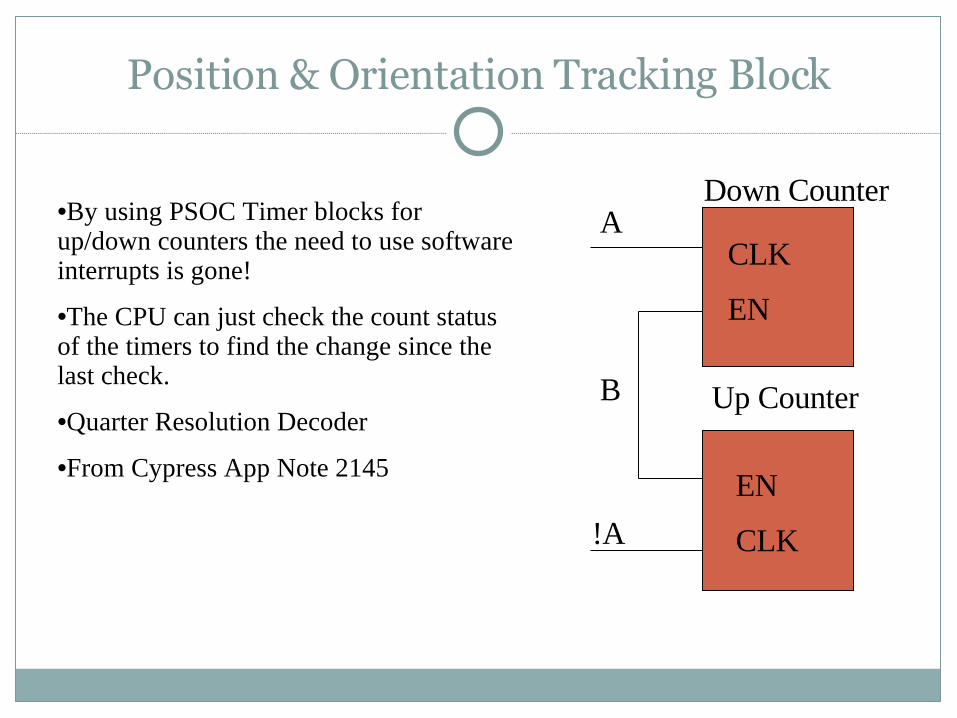
Down Counter
Up Counter
CLK
EN
EN
CLK
A
!A
B
•By using PSOC Timer blocks for up/down counters the need to use software interrupts is gone!
•The CPU can just check the count status of the timers to find the change since the last check.
•Quarter Resolution Decoder
•From Cypress App Note 2145
Position & Orientation Tracking Block
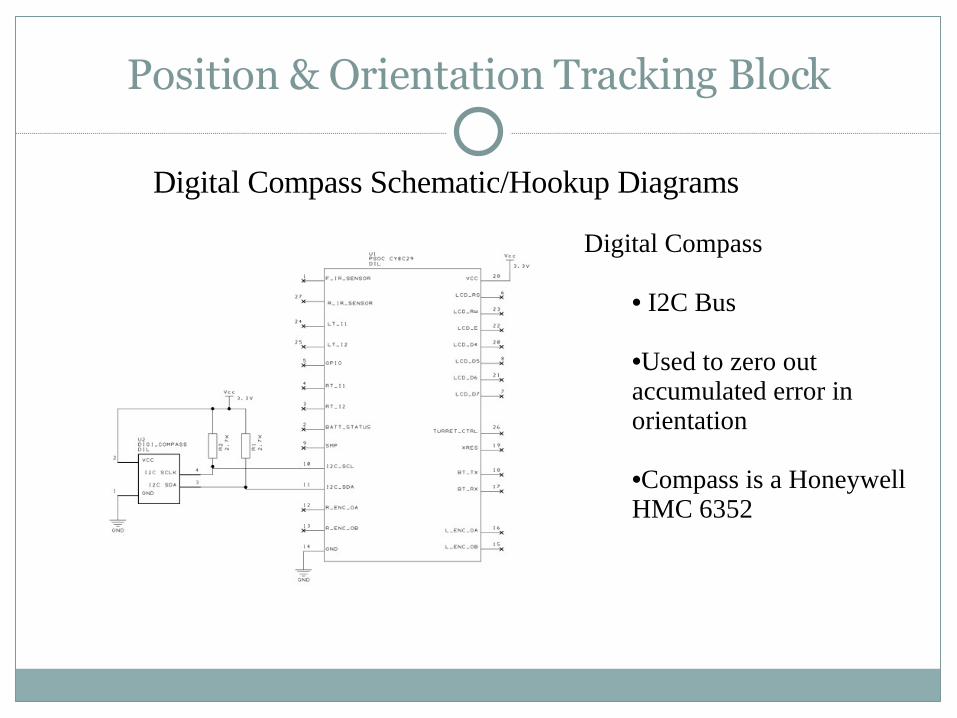
Digital Compass Schematic/Hookup Diagrams
Digital Compass
• I2C Bus
•Used to zero out accumulated error in orientation
•Compass is a Honeywell HMC 6352
Battery Charger
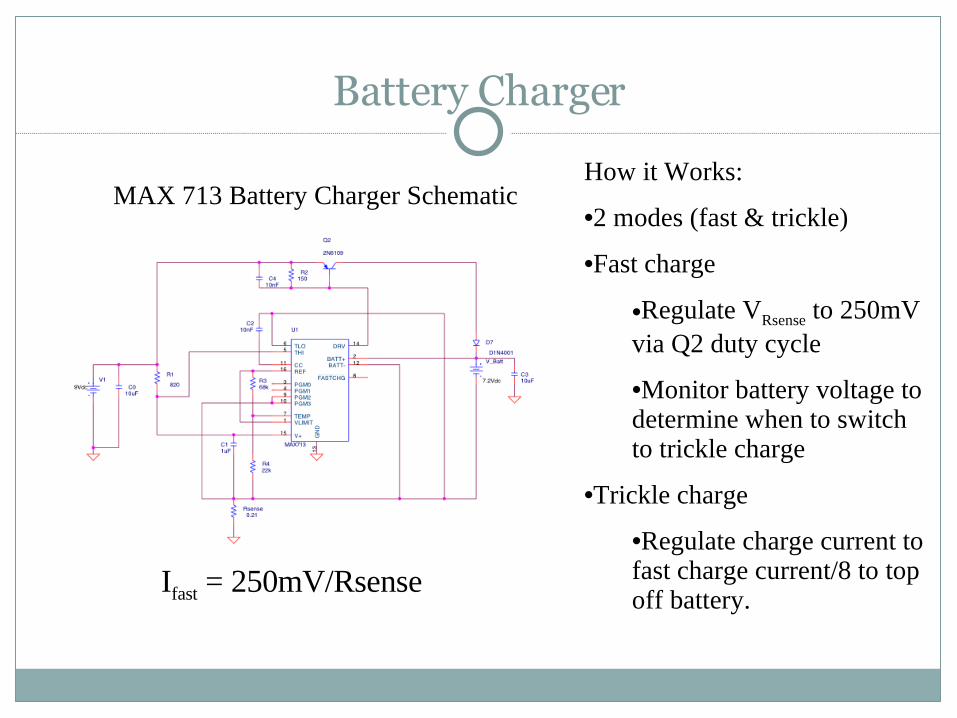
MAX 713 Battery Charger SchematicHow it Works:
•2 modes (fast & trickle)
•Fast charge
•Regulate VRsense to 250mV via Q2 duty cycle
•Monitor battery voltage to determine when to switch to trickle charge
•Trickle charge
•Regulate charge current to fast charge current/8 to top off battery.
Ifast = 250mV/Rsense
Main Controller/LCD
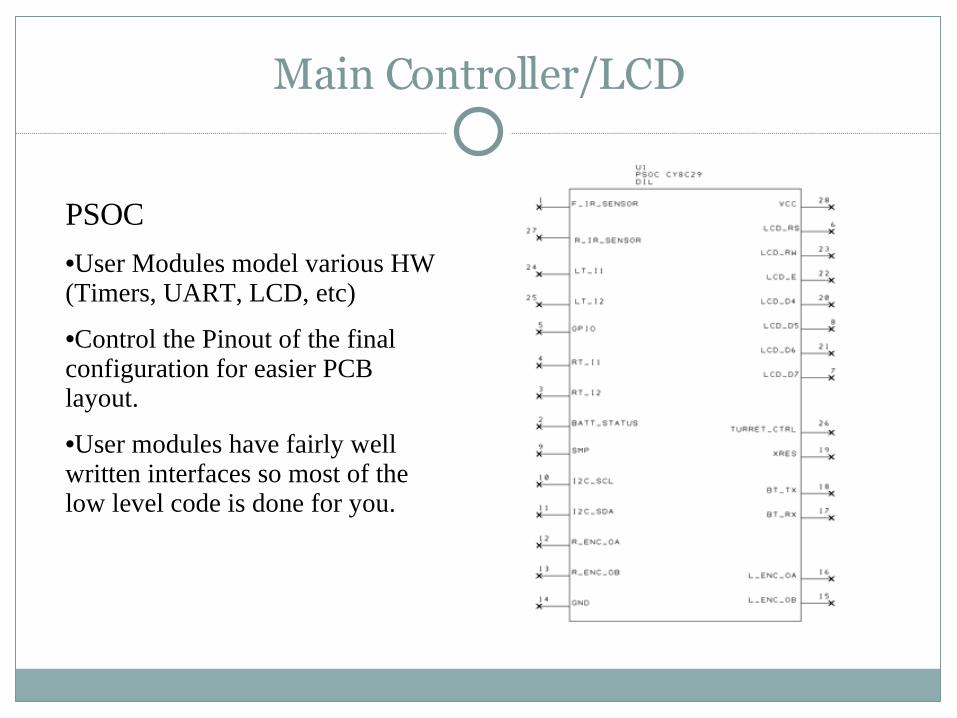
PSOC
•User Modules model various HW (Timers, UART, LCD, etc)
•Control the Pinout of the final configuration for easier PCB layout.
•User modules have fairly well written interfaces so most of the low level code is done for you.
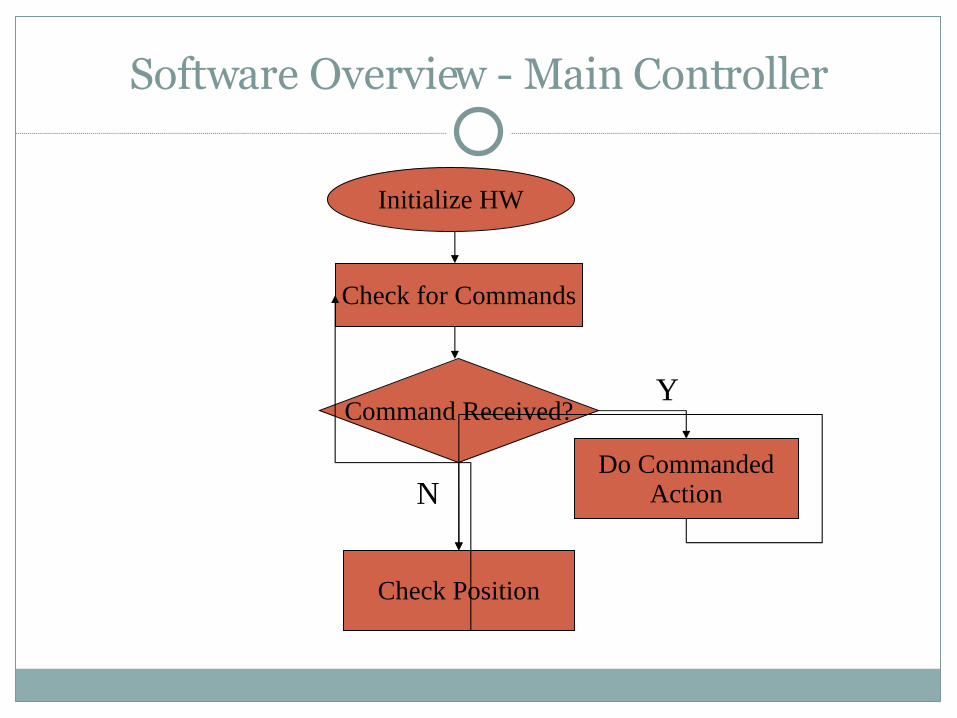
Software Overview - Main Controller
Initialize HW
Check for Commands
Do CommandedAction
Command Received?
Check Position
Y
N
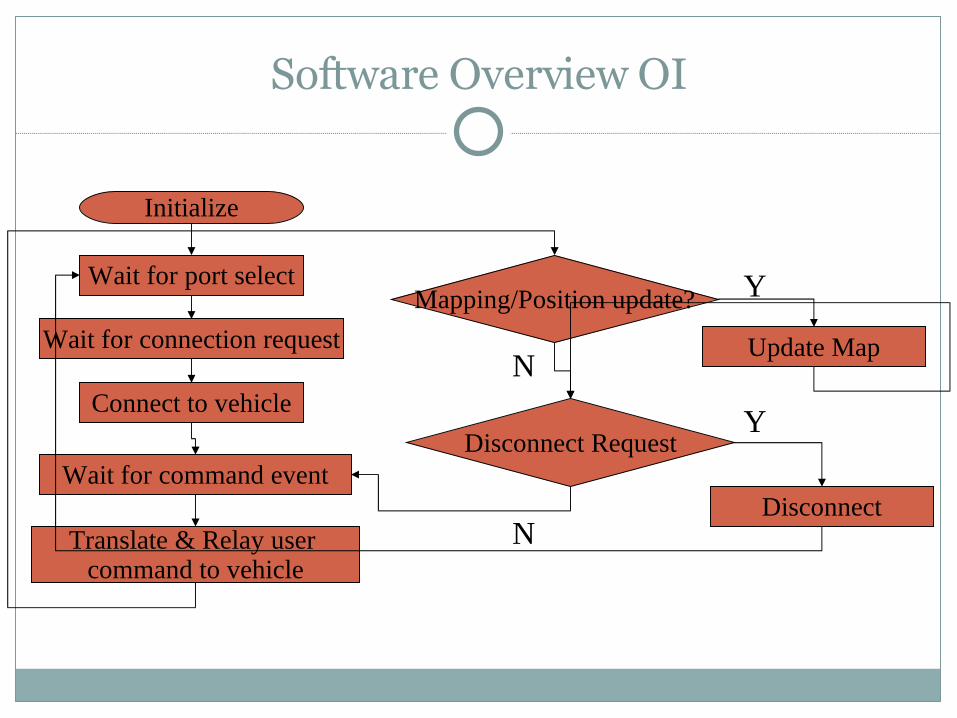
Software Overview OI
Initialize
Wait for port select
Wait for connection request
Connect to vehicle
Wait for command event
Translate & Relay user command to vehicle
Update Map
Mapping/Position update?
Disconnect Request
Disconnect
Y
Y
N
N
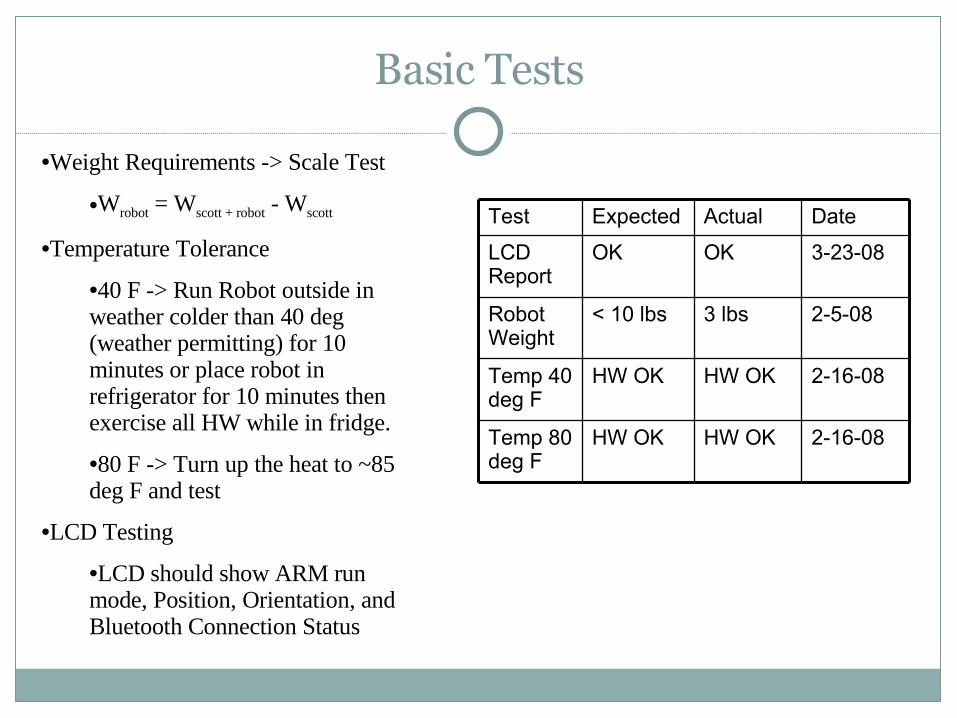
Basic Tests
Test Expected Actual Date
LCD Report
OK OK 3-23-08
Robot Weight
< 10 lbs 3 lbs 2-5-08
Temp 40 deg F
HW OK HW OK 2-16-08
Temp 80 deg F
HW OK HW OK 2-16-08
•Weight Requirements -> Scale Test
•Wrobot = Wscott + robot - Wscott
•Temperature Tolerance
•40 F -> Run Robot outside in weather colder than 40 deg (weather permitting) for 10 minutes or place robot in refrigerator for 10 minutes then exercise all HW while in fridge.
•80 F -> Turn up the heat to ~85 deg F and test
•LCD Testing
•LCD should show ARM run mode, Position, Orientation, and Bluetooth Connection Status
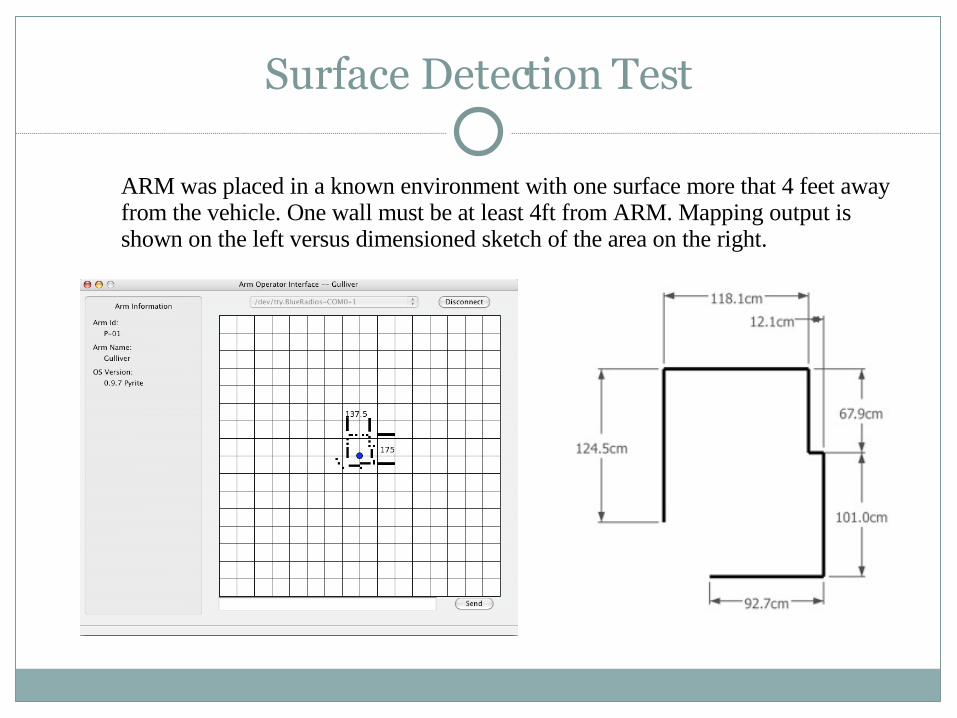
Surface Detection Test
ARM was placed in a known environment with one surface more that 4 feet away from the vehicle. One wall must be at least 4ft from ARM. Mapping output is shown on the left versus dimensioned sketch of the area on the right.
Bidirectional Square Path Test
•This test will determine how accurate the position and orientation tracking are.
•Robot travels a predetermined square path in both directions a set number of times.
•After each lap around the track the calculated position/orientation is compared to actual position/orientation and an error is computed
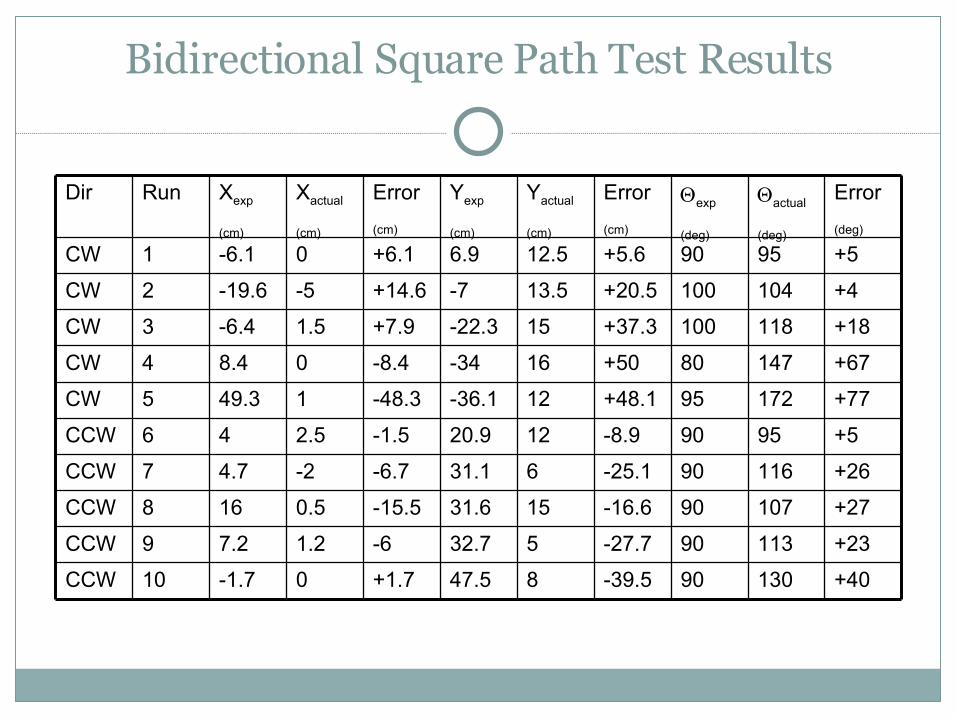
Bidirectional Square Path Test Results
Dir Run Xexp
(cm)
Xactual
(cm)
Error
(cm)
Yexp
(cm)
Yactual
(cm)
Error
(cm)
exp
(deg)
actual
(deg)
Error
(deg)
CW 1 -6.1 0 +6.1 6.9 12.5 +5.6 90 95 +5
CW 2 -19.6 -5 +14.6 -7 13.5 +20.5 100 104 +4
CW 3 -6.4 1.5 +7.9 -22.3 15 +37.3 100 118 +18
CW 4 8.4 0 -8.4 -34 16 +50 80 147 +67
CW 5 49.3 1 -48.3 -36.1 12 +48.1 95 172 +77
CCW 6 4 2.5 -1.5 20.9 12 -8.9 90 95 +5
CCW 7 4.7 -2 -6.7 31.1 6 -25.1 90 116 +26
CCW 8 16 0.5 -15.5 31.6 15 -16.6 90 107 +27
CCW 9 7.2 1.2 -6 32.7 5 -27.7 90 113 +23
CCW 10 -1.7 0 +1.7 47.5 8 -39.5 90 130 +40
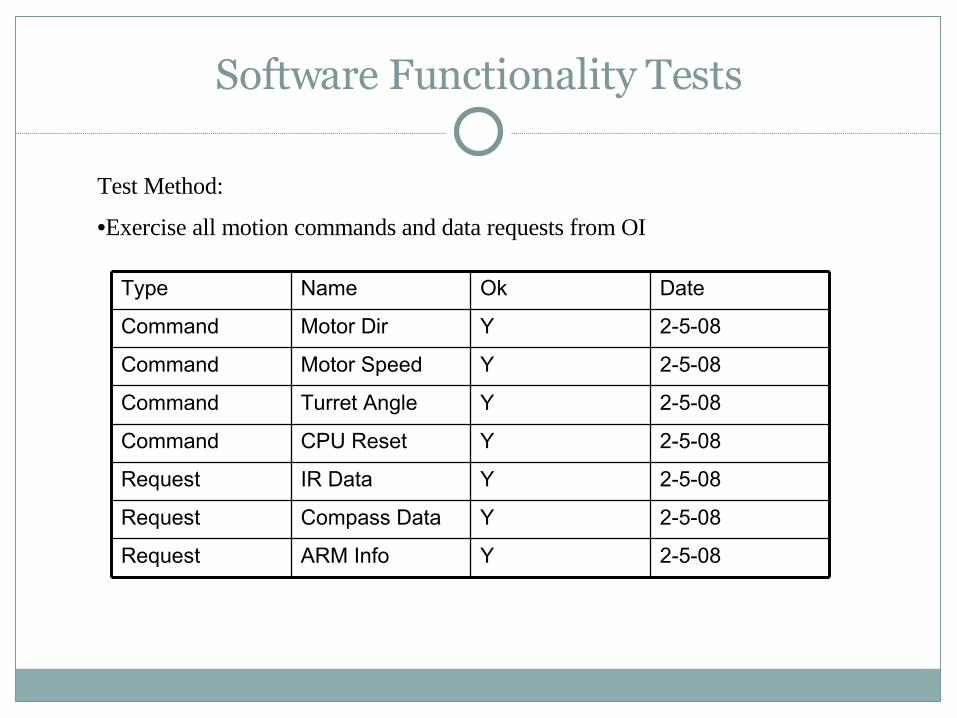
Software Functionality Tests
Type Name Ok Date
Command Motor Dir Y 2-5-08
Command Motor Speed Y 2-5-08
Command Turret Angle Y 2-5-08
Command CPU Reset Y 2-5-08
Request IR Data Y 2-5-08
Request Compass Data Y 2-5-08
Request ARM Info Y 2-5-08
Test Method:
•Exercise all motion commands and data requests from OI
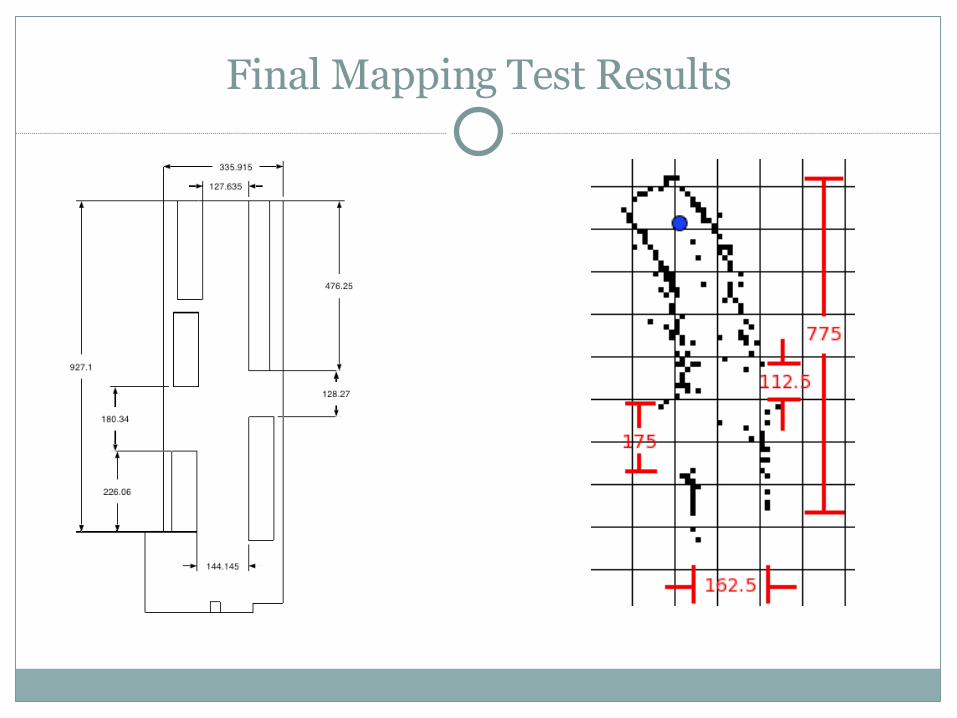
Final Mapping Test Results
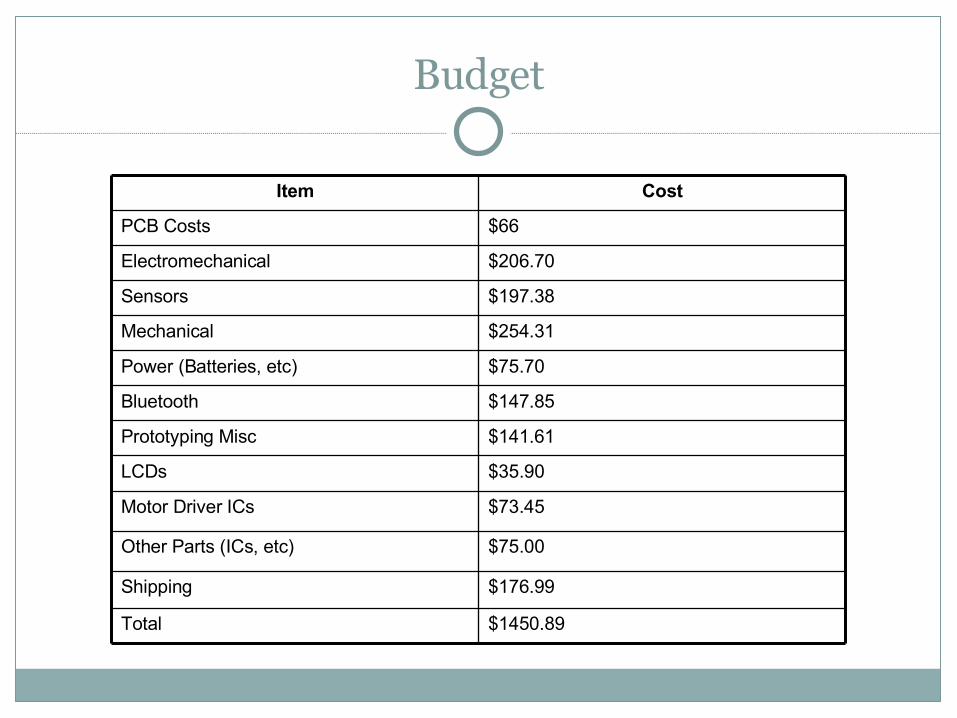
Budget
Item Cost
PCB Costs $66
Electromechanical $206.70
Sensors $197.38
Mechanical $254.31
Power (Batteries, etc) $75.70
Bluetooth $147.85
Prototyping Misc $141.61
LCDs $35.90
Motor Driver ICs $73.45
Other Parts (ICs, etc) $75.00
Shipping $176.99
Total $1450.89
Conclusions, Problems & Recommendations
Overall Summary:•Mapping accuracy is good at startup but begins to degrade over time due to errors in position/orientation tracking.•The time it takes the vehicle to complete a scan makes mapping while moving extremely difficult.
Problems:•Accurate Position & Orientation tracking is extremely difficult due to mechanical issues.•The compass reading is very unstable when the motors are operating.
Recommendations:•Move the compass further away from the motors to reduce the magnetic interference from the motors.•Characterizing the movement of the Servo would make the mapping even more accurate.
Demonstration Movie