overcoming the limitations of conservation of linear...
TRANSCRIPT
The University of Tulsa MEPS Lunch Meeting – 1 / 40
Overcoming the Limitations of Conservation of Linear
Momentum by Including External Impulse
March 12, 2008
Introduction
Introduction
• Motivation
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 2 / 40
Motivation
Introduction
• Motivation
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 3 / 40
• The principle of the Conservation of LinearMomentum (COLM) requires external force to besmall compared to collision forces.
m1v1,in + m2v2,in = m1v1,out + m2v2,out
does not include rotational aspects of planarimpact mechanics.
• Including rotation and external forces fromfriction enable us to solve for impact speeds innon-traditional situations
• Demonstration of this procedure is given using acase study.
Case Study
Introduction
Case Study
• Synopsis
• Scene Photo
• Skidmark Photo• ReconstructionObjectives• On-siteInvestigationObjectives• On-SiteInvestigation• Positions at Timeof Impact• Determine TruckPosition
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 4 / 40
Synopsis
Introduction
Case Study
• Synopsis
• Scene Photo
• Skidmark Photo• ReconstructionObjectives• On-siteInvestigationObjectives• On-SiteInvestigation• Positions at Timeof Impact• Determine TruckPosition
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 5 / 40
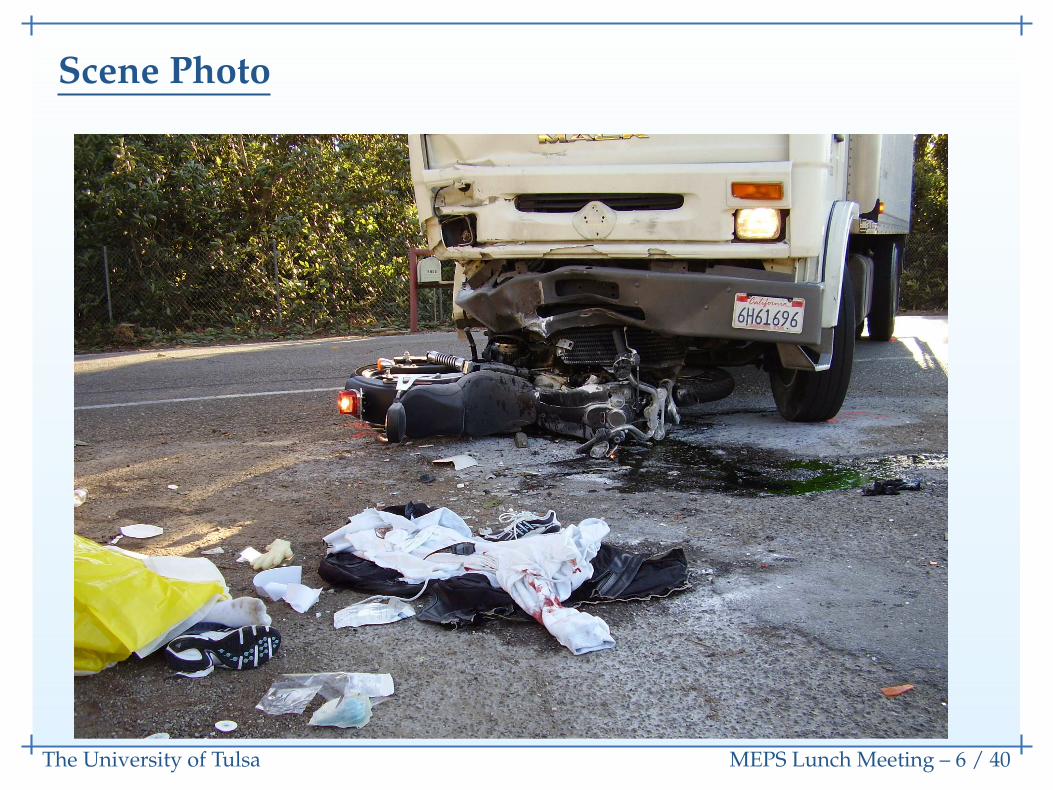
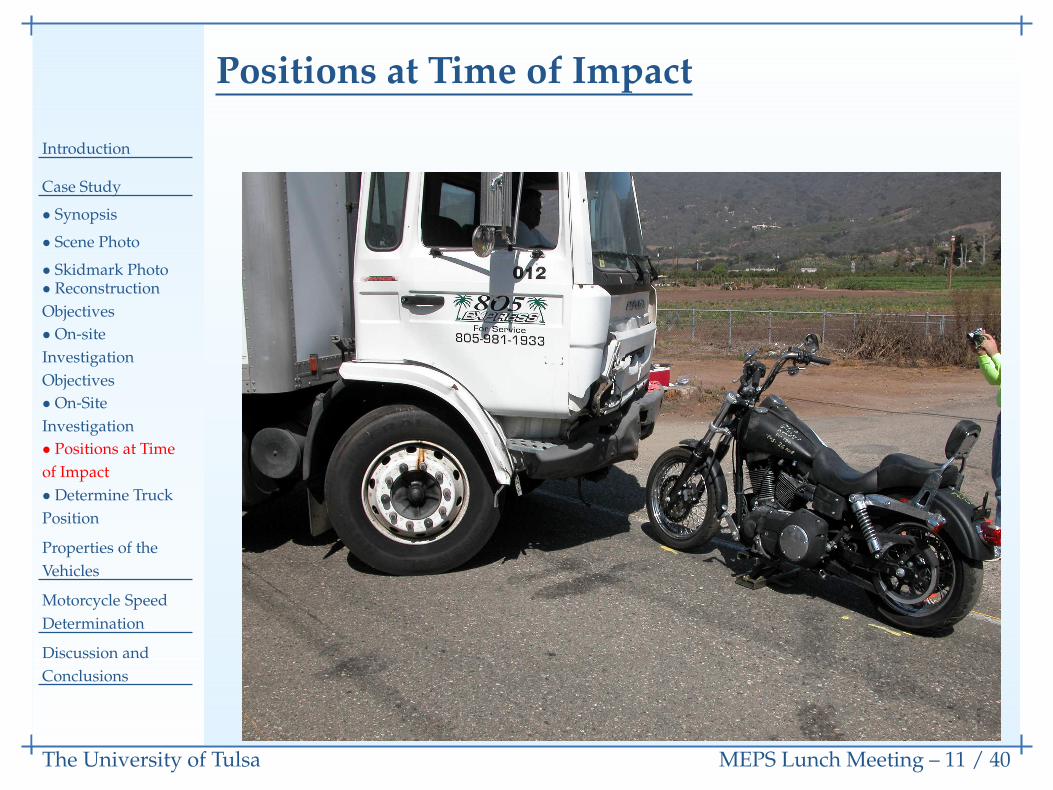
• Mack delivery truck turns left in front of amotorcycle
• Driver claims to have never seen them• Also claims to be stopped while in turn• Rural highway
◦ 700 ft sight distance◦ 55 mph speed limits
• Fatal for the motorcycle driver and passenger• Original vehicles and crash site are available
Scene Photo
The University of Tulsa MEPS Lunch Meeting – 6 / 40
Skidmark Photo
Introduction
Case Study
• Synopsis
• Scene Photo
• Skidmark Photo• ReconstructionObjectives• On-siteInvestigationObjectives• On-SiteInvestigation• Positions at Timeof Impact• Determine TruckPosition
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 7 / 40
Reconstruction Objectives
Introduction
Case Study
• Synopsis
• Scene Photo
• Skidmark Photo• ReconstructionObjectives• On-siteInvestigationObjectives• On-SiteInvestigation• Positions at Timeof Impact• Determine TruckPosition
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 8 / 40
1. Determine motorcycle speed at the beginning ofthe skid mark.
2. Determination of the motorcycle distance fromimpact at certain time intervals.
3. Comment concerning the cause of the crash.
On-site Investigation Objectives
Introduction
Case Study
• Synopsis
• Scene Photo
• Skidmark Photo• ReconstructionObjectives• On-siteInvestigationObjectives• On-SiteInvestigation• Positions at Timeof Impact• Determine TruckPosition
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 9 / 40
1. Determine the amount the truck was displacedfrom the impact of the motorcycle.
2. Measure the weights on each wheel on the Macktruck.
3. Demonstrate a likely sight picture of the truckdriver and motorcycle driver at different speeds.
4. Identify the location of impact of the motorcyclewith respect to the ground and with respect to thetruck.
5. Measure physical truck dimensions.6. Assess damage and deformation of the
motorcycle.
On-Site Investigation
Introduction
Case Study
• Synopsis
• Scene Photo
• Skidmark Photo• ReconstructionObjectives• On-siteInvestigationObjectives• On-SiteInvestigation• Positions at Timeof Impact• Determine TruckPosition
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 10 / 40
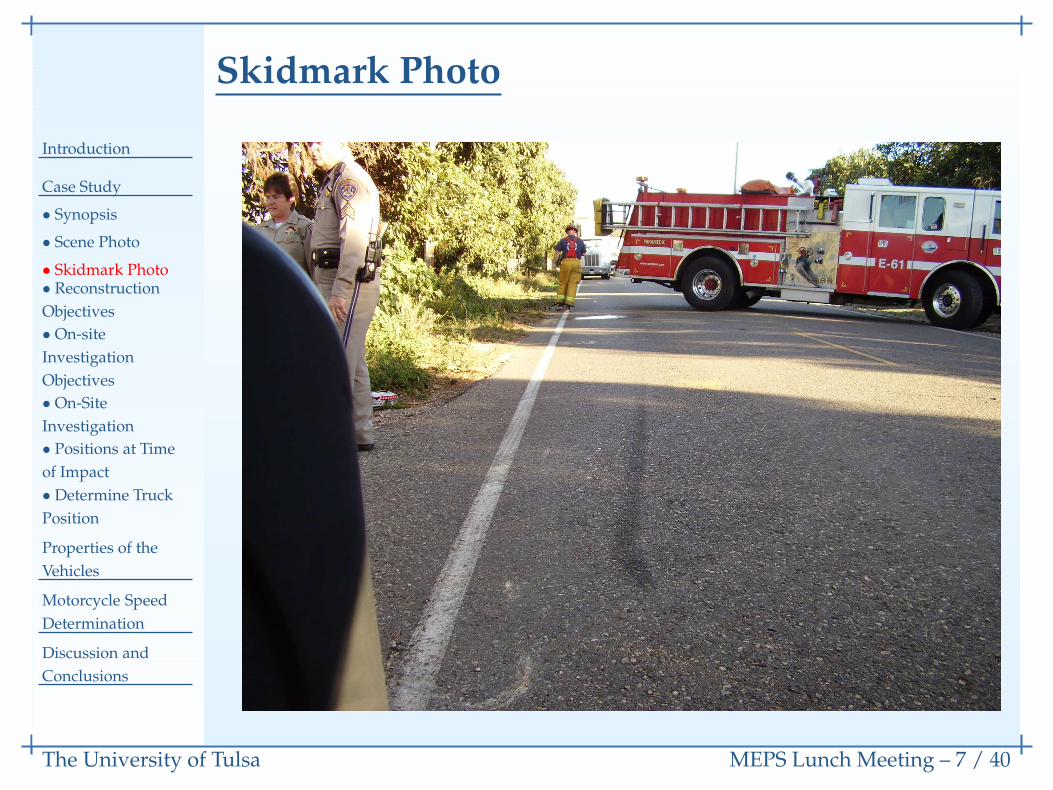
Examined both vehicles involved in the crash.Initial evidence was still at the crash site 9 monthslater.Officer who made the scene measurements assisted.The final position of the truck could be located.The area of impact is accurately determined due toM/C rear wheel skid mark.
Positions at Time of Impact
Introduction
Case Study
• Synopsis
• Scene Photo
• Skidmark Photo• ReconstructionObjectives• On-siteInvestigationObjectives• On-SiteInvestigation• Positions at Timeof Impact• Determine TruckPosition
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 11 / 40
Determine Truck Position
Introduction
Case Study
• Synopsis
• Scene Photo
• Skidmark Photo• ReconstructionObjectives• On-siteInvestigationObjectives• On-SiteInvestigation• Positions at Timeof Impact• Determine TruckPosition
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 12 / 40
• Reverse the truck from its documented final restposition.
• Steering angle assumed constant during postimpact travel.
• Investigating Officer confirmed steering angle.• This shows the area of impact on the truck was
moved 13 inches.• The impact rotated the truck about its rear axle.
Properties of the
Vehicles
Introduction
Case Study
Properties of theVehicles• Mack TruckDimensions• Harley DavidsonMotorcycle
Motorcycle SpeedDetermination
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 13 / 40
Mack Truck Dimensions
Introduction
Case Study
Properties of theVehicles• Mack TruckDimensions• Harley DavidsonMotorcycle
Motorcycle SpeedDetermination
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 14 / 40
48” 204”91” 125”
8450 lb15,250 lb6800 lb
d = wb(W f
W
)
= 204(
680015, 250
)
= 91 in
Harley Davidson Motorcycle
Introduction
Case Study
Properties of theVehicles• Mack TruckDimensions• Harley DavidsonMotorcycle
Motorcycle SpeedDetermination
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 15 / 40
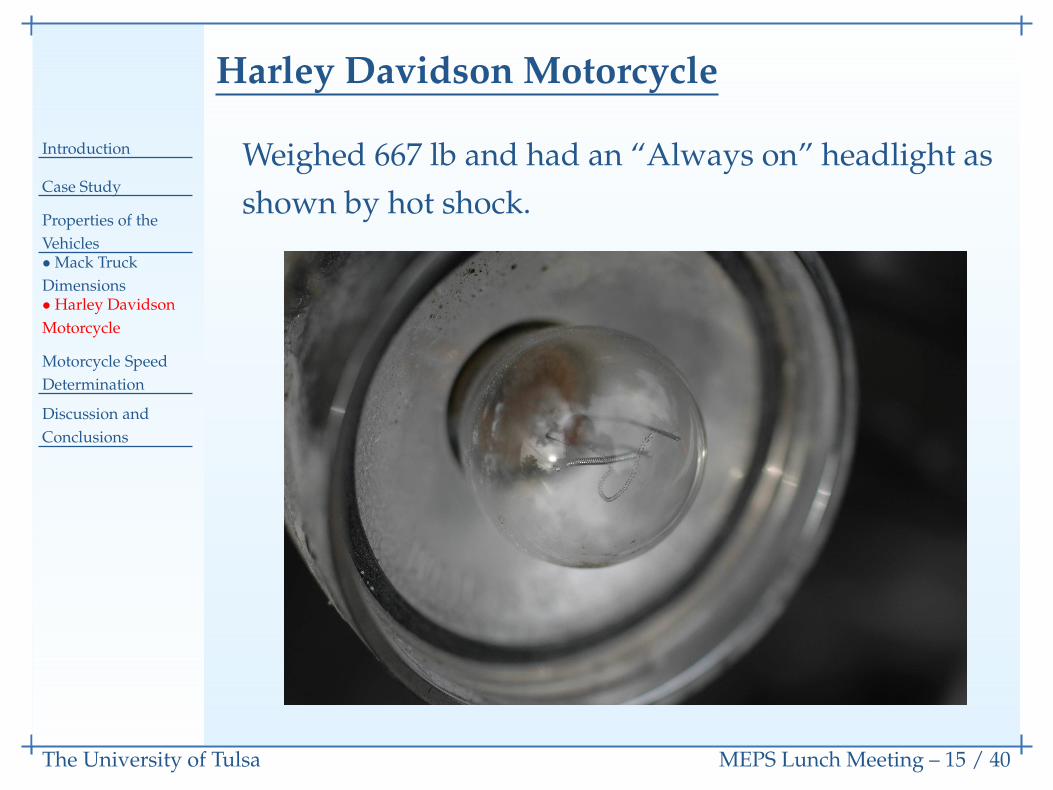
Weighed 667 lb and had an “Always on” headlight asshown by hot shock.
Motorcycle Speed
Determination
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
• Solution Strategy
• Angle of Rotation
• Work-Energy
• Delta Omega
• Turn Radius
• Angular velocity
• Friction & Torque
• Yaw Moment
• Angular Impulse
• M/C Delta V
• Impact Speed
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 16 / 40
Solution Strategy
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
• Solution Strategy
• Angle of Rotation
• Work-Energy
• Delta Omega
• Turn Radius
• Angular velocity
• Friction & Torque
• Yaw Moment
• Angular Impulse
• M/C Delta V
• Impact Speed
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 17 / 40
• Newton’s 2nd Law of Motion:
impulse = [∑ F]∆t = m∆v (1)
angular impulse = [∑ τo]∆t = Io∆ω (2)
where ∑ F is the sum of the external forces and
∑ τo is the sum of external torques or moments.• Newton’s 3rd Law of Motion:
◦ For every action there is an equal but oppositereaction.
◦ If we find the impulse on the truck, we candetermine the impulse on the M/C.
Eccentric Collision Analysis
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
• Solution Strategy
• Angle of Rotation
• Work-Energy
• Delta Omega
• Turn Radius
• Angular velocity
• Friction & Torque
• Yaw Moment
• Angular Impulse
• M/C Delta V
• Impact Speed
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 18 / 40
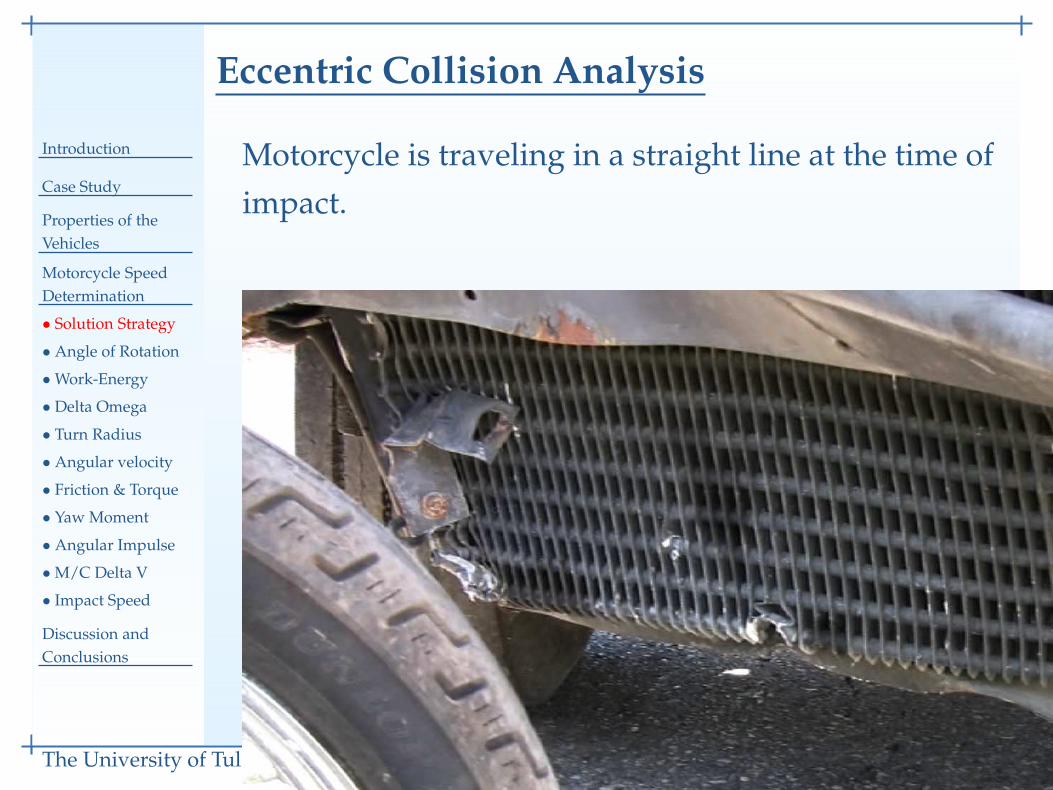
Motorcycle is traveling in a straight line at the time ofimpact.
The lateral displacement of the area of impact wasmeasured to be 13.5 inches.
Angle of Rotation
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
• Solution Strategy
• Angle of Rotation
• Work-Energy
• Delta Omega
• Turn Radius
• Angular velocity
• Friction & Torque
• Yaw Moment
• Angular Impulse
• M/C Delta V
• Impact Speed
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 19 / 40
• Angular displacement can be determined.• The center of rotation is the center of the rear
axles.• The angle is small and can be estimated by the arc
length:
θ =sr
=13.5246
= 0.05488 radians
where θ is the displacement angle, s is the arclength, and r is the distance from the center of therear axle to the area of impact.

Work-Energy Theorem for Rotation
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
• Solution Strategy
• Angle of Rotation
• Work-Energy
• Delta Omega
• Turn Radius
• Angular velocity
• Friction & Torque
• Yaw Moment
• Angular Impulse
• M/C Delta V
• Impact Speed
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 20 / 40
Energy in = Energy out + work done
12
Iω22 − τθ =
12
Iω21 (3)
where I is the yaw moment of inertia about the centerof the rear axle,ω2 = ω1 + ∆ω is the post impact angular velocity ofthe truck,ω1 is the angular velocity of the truck due to turning,andτ is the torque from friction.
Change in Angular Velocity
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
• Solution Strategy
• Angle of Rotation
• Work-Energy
• Delta Omega
• Turn Radius
• Angular velocity
• Friction & Torque
• Yaw Moment
• Angular Impulse
• M/C Delta V
• Impact Speed
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 21 / 40
Rewrite Eq. (3) as:
12
I(ω1 + ∆ω)2 − τθ =12
Iω21 (4)
where ∆ω is the change in angular velocity due to theexternal impulse (collision+).
∆ω =
√
ω21 +
2τθ
I− ω1 (5)
Therefore, the angular velocity of the truck in theturn, ω1, is needed.
Determining the Turn Radius
The University of Tulsa MEPS Lunch Meeting – 22 / 40
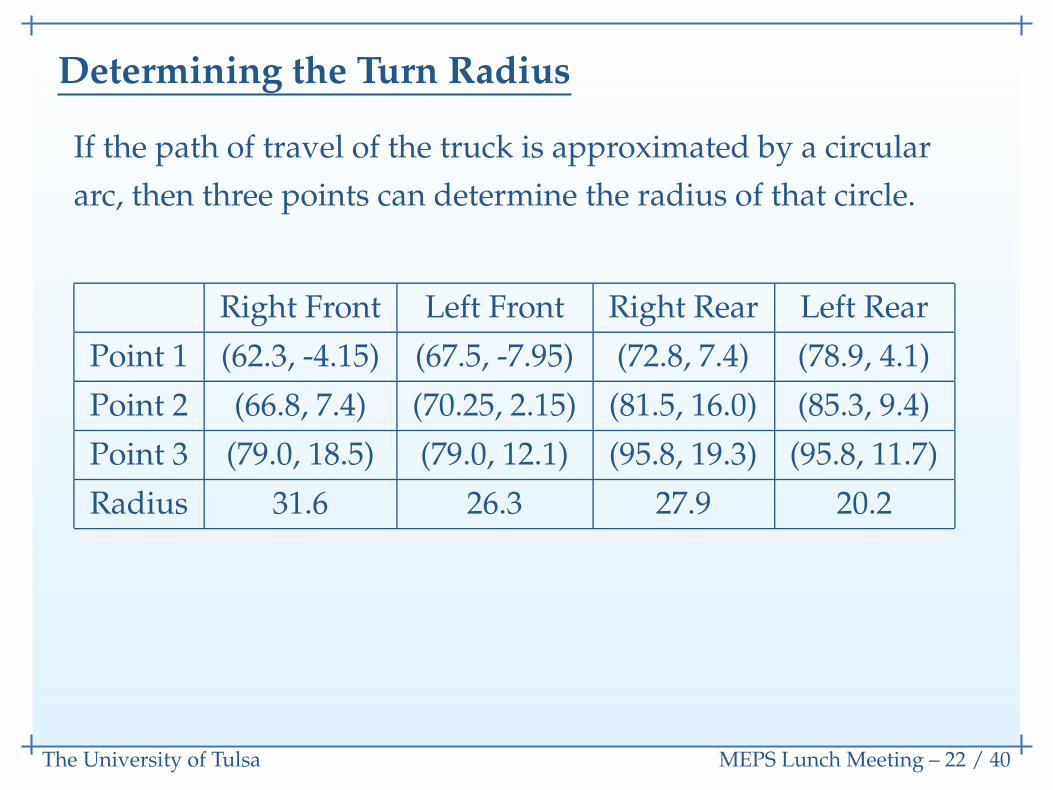
If the path of travel of the truck is approximated by a circulararc, then three points can determine the radius of that circle.
Right Front Left Front Right Rear Left Rear
Point 1 (62.3, -4.15) (67.5, -7.95) (72.8, 7.4) (78.9, 4.1)
Point 2 (66.8, 7.4) (70.25, 2.15) (81.5, 16.0) (85.3, 9.4)
Point 3 (79.0, 18.5) (79.0, 12.1) (95.8, 19.3) (95.8, 11.7)
Radius 31.6 26.3 27.9 20.2
Plotting the Travel Path
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
• Solution Strategy
• Angle of Rotation
• Work-Energy
• Delta Omega
• Turn Radius
• Angular velocity
• Friction & Torque
• Yaw Moment
• Angular Impulse
• M/C Delta V
• Impact Speed
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 23 / 40
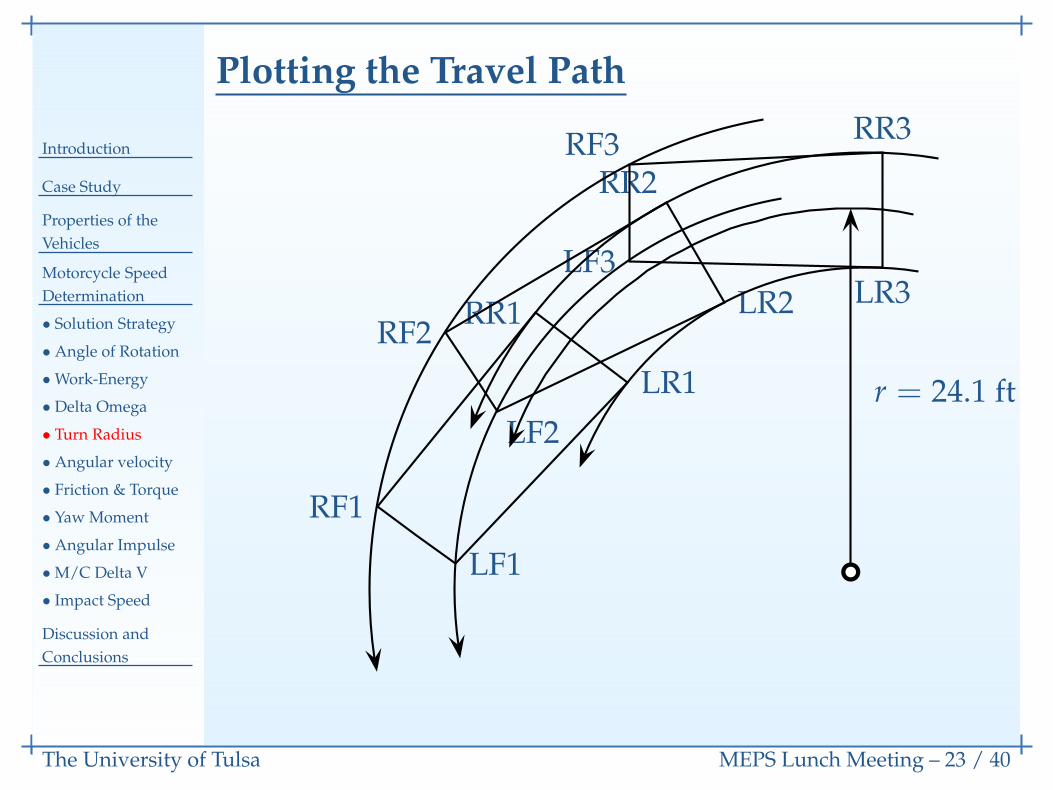
RF1
RR1
LF1
LR1
RF2
RR2
LF2
LR2
RF3 RR3
LF3LR3
r = 24.1 ft
Turn Radius Calculation
The University of Tulsa MEPS Lunch Meeting – 24 / 40
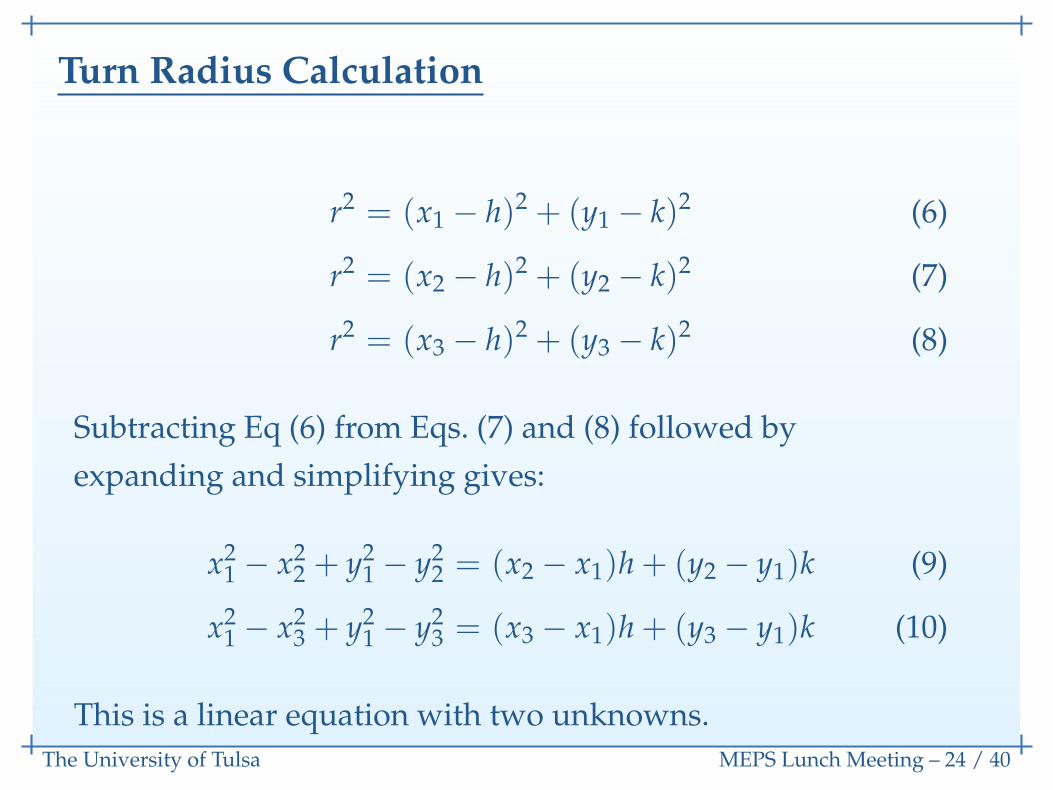
r2 = (x1 − h)2 + (y1 − k)2 (6)
r2 = (x2 − h)2 + (y2 − k)2 (7)
r2 = (x3 − h)2 + (y3 − k)2 (8)
Subtracting Eq (6) from Eqs. (7) and (8) followed byexpanding and simplifying gives:
x21 − x2
2 + y21 − y2
2 = (x2 − x1)h + (y2 − y1)k (9)
x21 − x2
3 + y21 − y2
3 = (x3 − x1)h + (y3 − y1)k (10)
This is a linear equation with two unknowns.
Angular velocity
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
• Solution Strategy
• Angle of Rotation
• Work-Energy
• Delta Omega
• Turn Radius
• Angular velocity
• Friction & Torque
• Yaw Moment
• Angular Impulse
• M/C Delta V
• Impact Speed
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 25 / 40
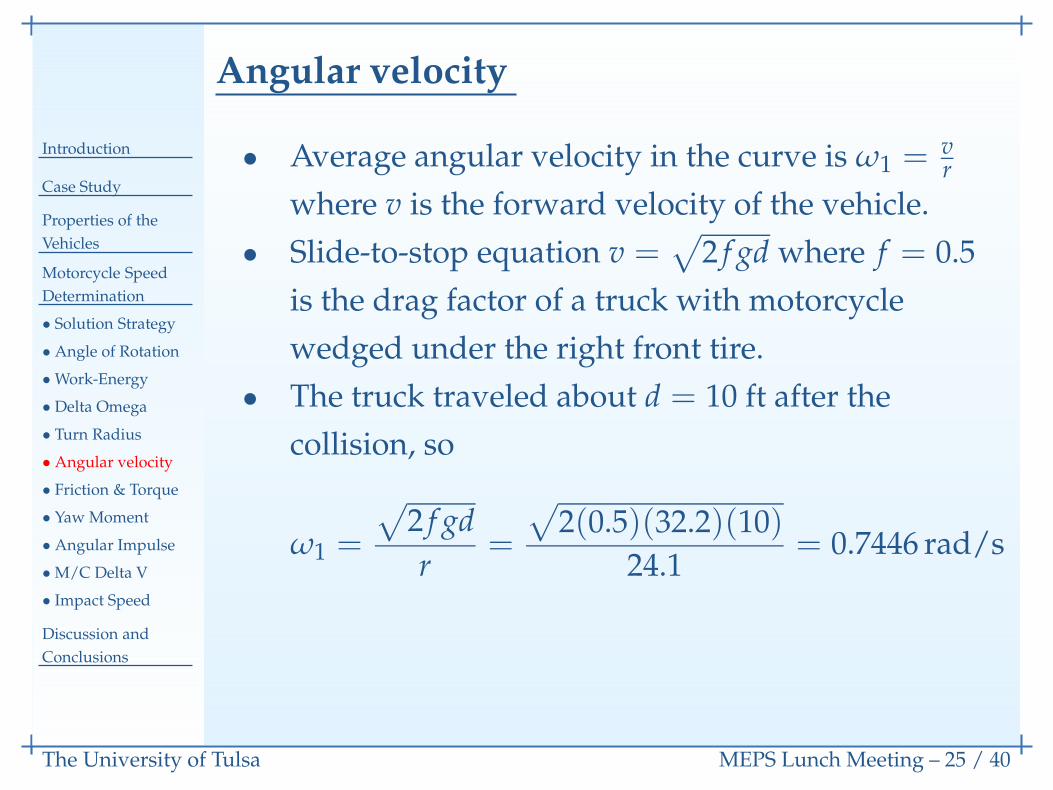
• Average angular velocity in the curve is ω1 = vr
where v is the forward velocity of the vehicle.• Slide-to-stop equation v =
√2 f gd where f = 0.5
is the drag factor of a truck with motorcyclewedged under the right front tire.
• The truck traveled about d = 10 ft after thecollision, so
ω1 =
√2 f gdr
=
√
2(0.5)(32.2)(10)
24.1= 0.7446 rad/s

Torque from Friction
The University of Tulsa MEPS Lunch Meeting – 26 / 40
The torque applied to the truck to resist rotation about thecenter of the rear axles comes from the lateral friction from thefront tires.
τ = wb × Ff riction (11)
where the wheelbase wb = 204 inches.
Ff riction = f W f = 0.6(7050) = 4230 lb (12)
where f = 0.6 is an acceptable drag factor for a commercialvehicle tire. This means the applied torque on the truck afterimpact is
τ = 204(4230) = 862, 920 in-lb (13)
Yaw Moment of Inertia of Mack Truck
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
• Solution Strategy
• Angle of Rotation
• Work-Energy
• Delta Omega
• Turn Radius
• Angular velocity
• Friction & Torque
• Yaw Moment
• Angular Impulse
• M/C Delta V
• Impact Speed
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 27 / 40
• University of Michigan Transportation ResearchInstitute reports the yaw moment of inertia isnearly 177,000 in-lb-sec2 about the COM.
• Parallel axis theorem:
I = IG + md2 (14)
I = 177, 000 +
(15, 250386.4
)
(91)2 = 503, 830 in-lb-sec2
(15)
Change in Angular Velocity
The University of Tulsa MEPS Lunch Meeting – 28 / 40
With all values determined, the change in angular velocity asa result of the impact can be determined for the truck usingEq. (5):
∆ω =
√
ω21 +
2τθ
I− ω1 (16)
=
√
0.74462 +2(862, 920)(0.05488)
503, 830− 0.7446 (17)
= 0.1170 rad/s (18)
The change in angular velocity comes from an externallyapplied angular impulse.
Angular Impulse and Momentum
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
• Solution Strategy
• Angle of Rotation
• Work-Energy
• Delta Omega
• Turn Radius
• Angular velocity
• Friction & Torque
• Yaw Moment
• Angular Impulse
• M/C Delta V
• Impact Speed
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 29 / 40
Fundamental text in dynamics [1] says:
Iω1︸︷︷︸
Momentum In
+ ∑ τ∆t︸ ︷︷ ︸
External Impulse
= I(ω1 + ∆ω)︸ ︷︷ ︸
Momentum Out
(19)
The external impulse on the truck comes from thecollision force of the motorcycle (Newton’s ThirdLaw) and the friction of the front tires on the ground.
Linear Impulse to Angular Impulse
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
• Solution Strategy
• Angle of Rotation
• Work-Energy
• Delta Omega
• Turn Radius
• Angular velocity
• Friction & Torque
• Yaw Moment
• Angular Impulse
• M/C Delta V
• Impact Speed
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 30 / 40
Radius vector is cross multiplied by the impulsevector. Therefore, the external impulse on the truck is:
∑ τ ∆t = rhit × m∆v − τ∆t (20)
The magnitude of the cross product is:
|rhit × m∆v| = m|rhit||∆v| sin θ (21)

Motorcycle Velocity Change
The University of Tulsa MEPS Lunch Meeting – 31 / 40
Eqs. (19)-(21) give an expression for the ∆v of the motorcycle:
∆v =I∆ω + τ∆tmrhit sin θ
(22)
∆t is the duration of the crash (approx 0.150 seconds)m is the mass of the motorcycle and riders,rhit is the distance from the rear axle to the center of pressureof the impact area (246 inches),θ is the angle between the ∆v vector and the center line of thetruck.
Mass of Motorcycle
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
• Solution Strategy
• Angle of Rotation
• Work-Energy
• Delta Omega
• Turn Radius
• Angular velocity
• Friction & Torque
• Yaw Moment
• Angular Impulse
• M/C Delta V
• Impact Speed
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 32 / 40
The weight of the motorcycle and rider combinationis the sum of the the motorcycle weight, the driver’sweight, and the passenger’s weight. Therefore, thetotal mass is determined as
m =wmotorcycle + wdriver + wpassenger
g(23)
=667 + 195 + 240
386.4 in/s2 (24)
= 2.8520 lb-sec2/in (25)
The angleθ between the radius and the ∆v vectormust be estimated.

Impact Speed
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
• Solution Strategy
• Angle of Rotation
• Work-Energy
• Delta Omega
• Turn Radius
• Angular velocity
• Friction & Torque
• Yaw Moment
• Angular Impulse
• M/C Delta V
• Impact Speed
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 33 / 40
The calculated impact speed for the motorcycle is
∆v =I∆ω + τ∆tmrhit sin θ
(26)
=(503, 830)(0.1170) + 862, 920(0.150)
(2.8520)(246) sin(30)(27)
= 546.03 in/sec (28)
= 45.50 ft/sec (29)
= 31.03 mph (30)

Speed at the Beginning of the Skid
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
• Solution Strategy
• Angle of Rotation
• Work-Energy
• Delta Omega
• Turn Radius
• Angular velocity
• Friction & Torque
• Yaw Moment
• Angular Impulse
• M/C Delta V
• Impact Speed
Discussion andConclusions
The University of Tulsa MEPS Lunch Meeting – 34 / 40
Combining this impact speed with the speed lossfrom skidding (using a 0.7 for the drag factor), thespeed the motorcycle was going at the time of theimpending skid is
S =√
30d f + S2impact (31)
=√
30(40)(0.7) + 31.032 (32)
= 42.46 mph (33)
Discussion and
Conclusions
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions• What Does ThisShow?
• Limitations
• Conclusions
• References
• Any Questions?
The University of Tulsa MEPS Lunch Meeting – 35 / 40
What Does This Show?
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions• What Does ThisShow?
• Limitations
• Conclusions
• References
• Any Questions?
The University of Tulsa MEPS Lunch Meeting – 36 / 40
• Accounting for external impulse enables solution• Thorough scene documentation is needed to
perform reconstruction• Using the actual vehicles makes for a compelling
case• Rotational motion is not coupled to translation• The M/C has angular momentum even when
traveling straight (depends on radius).
Limitations
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions• What Does ThisShow?
• Limitations
• Conclusions
• References
• Any Questions?
The University of Tulsa MEPS Lunch Meeting – 37 / 40
• Sensitivity of the analysis is not shown
◦ Monte Carlo simulation suggests a robustsolution
◦ Sensitivity gradients would be useful
• May be a prohibitive technique without using theactual vehicles and being able to shut down theroad
• Expensive in time and manpower
Conclusions
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions• What Does ThisShow?
• Limitations
• Conclusions
• References
• Any Questions?
The University of Tulsa MEPS Lunch Meeting – 38 / 40
1. The M/C was traveling nearly 31 mph at impact.2. The M/C was likely traveling 42 mph at the
beginning of the skid.3. The sight distance provided ample time for the
driver of the truck to see the M/C.4. Evidence suggests the headlight of the motorcycle
was on at the time of the crash.5. The scrape marks, post impact travel, and the fact
that the bike was wedged under the right fronttire indicates the truck was moving forward at thetime of impact.
6. Analysis resulted in a conviction of the Macktruck driver.
References
The University of Tulsa MEPS Lunch Meeting – 39 / 40
[1] F. P. Beer and E. R. Johnston Jr., Vector Mechanics forEngineers: Dynamics, 5th ed. McGraw Hill, 1988.
[2] J. G. Daily, N. Shigemura, and J. S. Daily, Fundamentals ofTraffic Crash Reconstruction, ser. Traffic CrashReconstruction. Jacksonville, Florida: Institute of PoliceTechnololgy and Managment, University of North Florida,2006, vol. 2.
Any Questions?
Introduction
Case Study
Properties of theVehicles
Motorcycle SpeedDetermination
Discussion andConclusions• What Does ThisShow?
• Limitations
• Conclusions
• References
• Any Questions?
The University of Tulsa MEPS Lunch Meeting – 40 / 40