overhead crane motor installation
DESCRIPTION
crane logisticsTRANSCRIPT
1 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
Περιεχόμενα
1. ΕΚΦΩΝΗΗ ΕΡΓΑΙΑ……………………………............................................................2
2. ΤΝΟΠΣΙΚΗ ΠΑΡΟΤΙΑΗ ΑΠΟΣΕΛΕΜΑΣΩΝ……………………………….…….……………….5
3. ΑΝΑΛΤΣΙΚΟΙ ΤΠΟΛΟΓΙΜΟΙ & ΕΠΕΞΗΓΗΕΙ…………………….…………..….……………6
3.1 ΚΙΝΗΗ ΜΕ ΣΑΘΕΡΗ ΣΑΧΤΣΗΣΑ……………………………………………….…..………6
3.2 ΚΙΝΗΗ ΜΕ ΕΠΙΣΑΧΤΝΗ…………………………………………………………….………….7
3.3 ΠΡΟΟΜΟΙΩΗ ΣΟ PSIM………………………………………………………….………11
4. ΒΙΒΛΙOΓΡΑΦΙΚΗ ΕΡΕΤΝΑ ΓΙΑ ΚΙΝΗΣΗΡΕ EFF2…………………………………………………18
2 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
1.ΕΚΦΩΝΗΗ ΕΡΓΑΙΑ
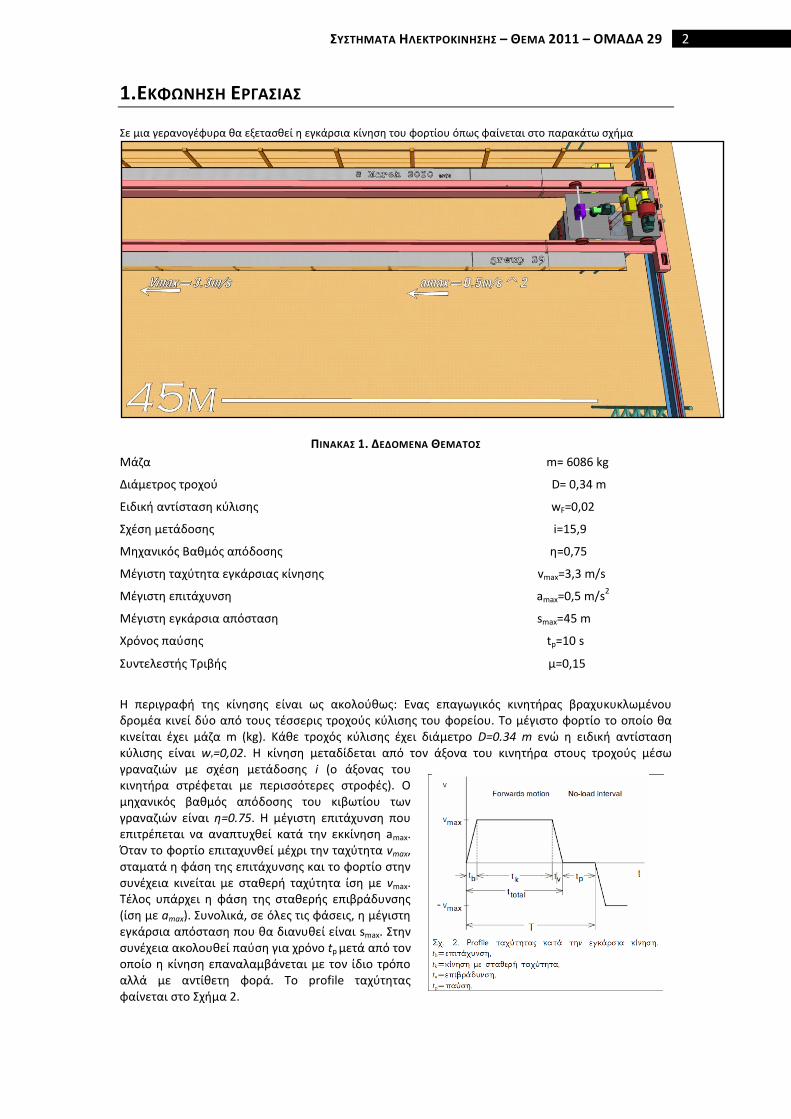
Σε μια γερανογζφυρα κα εξεταςκεί θ εγκάρςια κίνθςθ του φορτίου όπωσ φαίνεται ςτο παρακάτω ςχιμα
ΠΙΝΑΚΑ 1. ΔΕΔΟΜΕΝΑ ΘΕΜΑΣΟ
Μάηα m= 6086 kg
Διάμετροσ τροχοφ D= 0,34 m
Ειδικι αντίςταςθ κφλιςθσ wF=0,02
Σχζςθ μετάδοςθσ i=15,9
Μθχανικόσ Βακμόσ απόδοςθσ θ=0,75
Μζγιςτθ ταχφτθτα εγκάρςιασ κίνθςθσ vmax=3,3 m/s
Μζγιςτθ επιτάχυνςθ amax=0,5 m/s2
Μζγιςτθ εγκάρςια απόςταςθ smax=45 m
Χρόνοσ παφςθσ tp=10 s
Συντελεςτισ Τριβισ μ=0,15
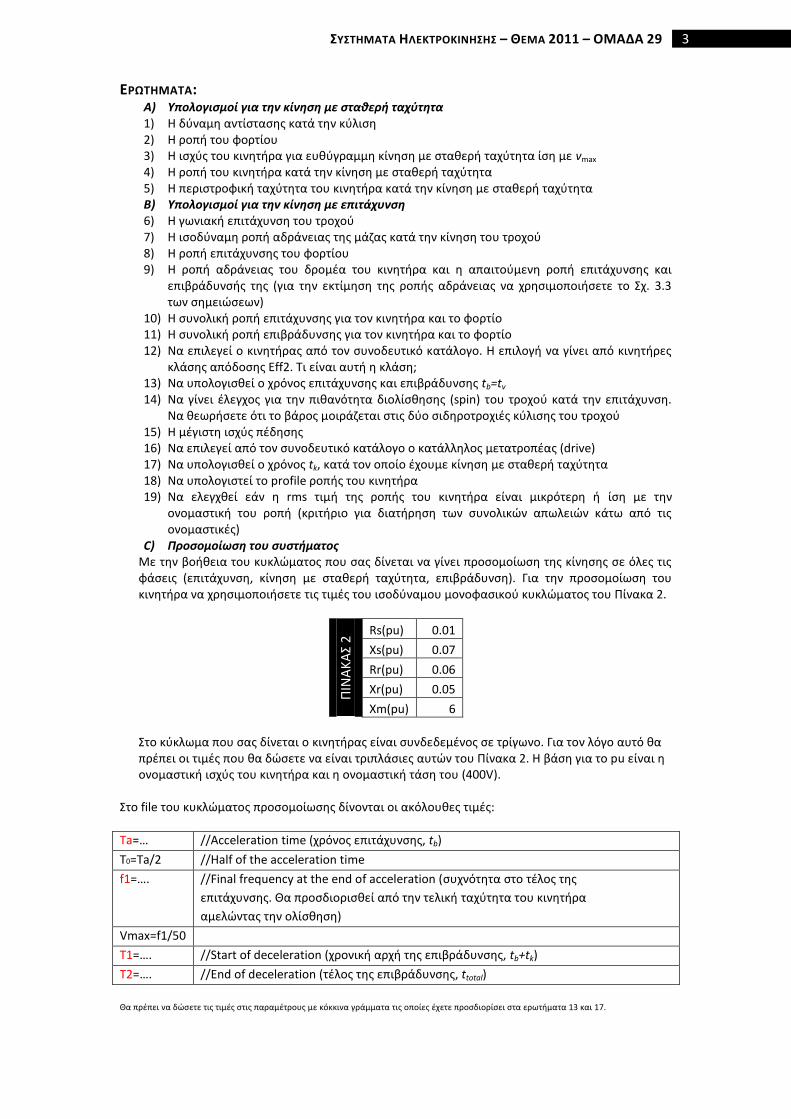
Η περιγραφι τθσ κίνθςθσ είναι ωσ ακολοφκωσ: Ενασ επαγωγικόσ κινθτιρασ βραχυκυκλωμζνου δρομζα κινεί δφο από τουσ τζςςερισ τροχοφσ κφλιςθσ του φορείου. Το μζγιςτο φορτίο το οποίο κα κινείται ζχει μάηα m (kg). Κάκε τροχόσ κφλιςθσ ζχει διάμετρο D=0.34 m ενϊ θ ειδικι αντίςταςθ κφλιςθσ είναι wF=0,02. Η κίνθςθ μεταδίδεται από τον άξονα του κινθτιρα ςτουσ τροχοφσ μζςω γραναηιϊν με ςχζςθ μετάδοςθσ i (ο άξονασ του κινθτιρα ςτρζφεται με περιςςότερεσ ςτροφζσ). Ο μθχανικόσ βακμόσ απόδοςθσ του κιβωτίου των γραναηιϊν είναι θ=0.75. Η μζγιςτθ επιτάχυνςθ που επιτρζπεται να αναπτυχκεί κατά τθν εκκίνθςθ amax. Όταν το φορτίο επιταχυνκεί μζχρι τθν ταχφτθτα vmax, ςταματά θ φάςθ τθσ επιτάχυνςθσ και το φορτίο ςτθν ςυνζχεια κινείται με ςτακερι ταχφτθτα ίςθ με vmax. Τζλοσ υπάρχει θ φάςθ τθσ ςτακερισ επιβράδυνςθσ (ίςθ με amax). Συνολικά, ςε όλεσ τισ φάςεισ, θ μζγιςτθ εγκάρςια απόςταςθ που κα διανυκεί είναι smax. Στθν ςυνζχεια ακολουκεί παφςθ για χρόνο tp μετά από τον οποίο θ κίνθςθ επαναλαμβάνεται με τον ίδιο τρόπο αλλά με αντίκετθ φορά. Το profile ταχφτθτασ φαίνεται ςτο Σχιμα 2.
3 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
ΕΡΩΣΗΜΑΣΑ: A) Υπολογιςμοί για την κίνηςη με ςταθερή ταχφτητα 1) Η δφναμθ αντίςταςθσ κατά τθν κφλιςθ 2) Η ροπι του φορτίου 3) Η ιςχφσ του κινθτιρα για ευκφγραμμθ κίνθςθ με ςτακερι ταχφτθτα ίςθ με vmax 4) H ροπι του κινθτιρα κατά τθν κίνθςθ με ςτακερι ταχφτθτα 5) Η περιςτροφικι ταχφτθτα του κινθτιρα κατά τθν κίνθςθ με ςτακερι ταχφτθτα B) Υπολογιςμοί για την κίνηςη με επιτάχυνςη 6) Η γωνιακι επιτάχυνςθ του τροχοφ 7) Η ιςοδφναμθ ροπι αδράνειασ τθσ μάηασ κατά τθν κίνθςθ του τροχοφ 8) Η ροπι επιτάχυνςθσ του φορτίου 9) Η ροπι αδράνειασ του δρομζα του κινθτιρα και θ απαιτοφμενθ ροπι επιτάχυνςθσ και
επιβράδυνςισ τθσ (για τθν εκτίμθςθ τθσ ροπισ αδράνειασ να χρθςιμοποιιςετε το Σχ. 3.3 των ςθμειϊςεων)
10) Η ςυνολικι ροπι επιτάχυνςθσ για τον κινθτιρα και το φορτίο 11) Η ςυνολικι ροπι επιβράδυνςθσ για τον κινθτιρα και το φορτίο 12) Να επιλεγεί ο κινθτιρασ από τον ςυνοδευτικό κατάλογο. Η επιλογι να γίνει από κινθτιρεσ
κλάςθσ απόδοςθσ Eff2. Τι είναι αυτι θ κλάςθ; 13) Να υπολογιςκεί ο χρόνοσ επιτάχυνςθσ και επιβράδυνςθσ tb=tv 14) Να γίνει ζλεγχοσ για τθν πικανότθτα διολίςκθςθσ (spin) του τροχοφ κατά τθν επιτάχυνςθ.
Να κεωριςετε ότι το βάροσ μοιράηεται ςτισ δφο ςιδθροτροχιζσ κφλιςθσ του τροχοφ 15) Η μζγιςτθ ιςχφσ πζδθςθσ 16) Να επιλεγεί από τον ςυνοδευτικό κατάλογο ο κατάλλθλοσ μετατροπζασ (drive) 17) Να υπολογιςκεί ο χρόνοσ tk, κατά τον οποίο ζχουμε κίνθςθ με ςτακερι ταχφτθτα 18) Να υπολογιςτεί το profile ροπισ του κινθτιρα 19) Να ελεγχκεί εάν θ rms τιμι τθσ ροπισ του κινθτιρα είναι μικρότερθ ι ίςθ με τθν
ονομαςτικι του ροπι (κριτιριο για διατιρθςθ των ςυνολικϊν απωλειϊν κάτω από τισ ονομαςτικζσ)
C) Προςομοίωςη του ςυςτήματοσ Με τθν βοικεια του κυκλϊματοσ που ςασ δίνεται να γίνει προςομοίωςθ τθσ κίνθςθσ ςε όλεσ τισ φάςεισ (επιτάχυνςθ, κίνθςθ με ςτακερι ταχφτθτα, επιβράδυνςθ). Για τθν προςομοίωςθ του κινθτιρα να χρθςιμοποιιςετε τισ τιμζσ του ιςοδφναμου μονοφαςικοφ κυκλϊματοσ του Πίνακα 2.
ΠΙΝ
ΑΚ
ΑΣ
2
Rs(pu) 0.01
Xs(pu) 0.07
Rr(pu) 0.06
Xr(pu) 0.05
Xm(pu) 6
Στο κφκλωμα που ςασ δίνεται ο κινθτιρασ είναι ςυνδεδεμζνοσ ςε τρίγωνο. Για τον λόγο αυτό κα πρζπει οι τιμζσ που κα δϊςετε να είναι τριπλάςιεσ αυτϊν του Πίνακα 2. Η βάςθ για το pu είναι θ ονομαςτικι ιςχφσ του κινθτιρα και θ ονομαςτικι τάςθ του (400V).
Στο file του κυκλϊματοσ προςομοίωςθσ δίνονται οι ακόλουκεσ τιμζσ:
Ta=… //Acceleration time (χρόνοσ επιτάχυνςθσ, tb)
Τ0=Ta/2 //Half of the acceleration time
f1=…. //Final frequency at the end of acceleration (ςυχνότθτα ςτο τζλοσ τθσ
επιτάχυνςθσ. Θα προςδιοριςκεί από τθν τελικι ταχφτθτα του κινθτιρα
αμελϊντασ τθν ολίςκθςθ)
Vmax=f1/50
T1=…. //Start of deceleration (χρονικι αρχι τθσ επιβράδυνςθσ, tb+tk)
T2=…. //End of deceleration (τζλοσ τθσ επιβράδυνςθσ, ttotal)
Θα πρζπει να δϊςετε τισ τιμζσ ςτισ παραμζτρουσ με κόκκινα γράμματα τισ οποίεσ ζχετε προςδιορίςει ςτα ερωτιματα 13 και 17.
4 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
Με τθν προςομοίωςθ να κάνετε τισ παρακάτω ςυγκρίςεισ: 20) Τθν ροπι του κινθτιρα με αυτιν που υπολογίςατε ςτο ερϊτθμα 18. Να υπολογιςκεί από
τθν προςομοίωςθ θ ςυνολικι rms τιμι τθσ ροπισ για τον χρόνο ttotal+tp και να ςυγκρικεί με τθν ονομαςτικι ροπι του κινθτιρα που δίνει ο καταςκευαςτισ.
21) Τισ ςτροφζσ του κινθτιρα ςυναρτιςει του χρόνου με αυτιν που υπολογίςατε βάςει του Σχ. 2.
22) Να υπολογιςκεί θ rms τιμι του ρεφματοσ γραμμισ του κινθτιρα και του drive για χρόνο ttotal+tp και να ςυγκρικεί με τισ ονομαςτικζσ τιμζσ που δίνουν οι αντίςτοιχοι καταςκευαςτζσ. Θα μποροφςατε να χρθςιμοποιιςετε κινθτιρα ι drive μικρότερου μεγζκουσ;
23) Να υπολογιςκεί το μζςο ρεφμα ςτο dc μζροσ του drive ςε όλθ τθν διάρκεια τθσ κίνθςθσ. 24) Να υπολογιςκεί θ ενζργεια που επιςτρζφει ο κινθτιρασ ςτο drive κατά τθν επιβράδυνςι
του. Να ςυγκρικεί αυτι θ ενζργεια με τθν κινθτικι ενζργεια που ιταν αποκθκευμζνθ ςτο δρομζα του κινθτιρα και ςτο φορτίο όταν είχαν τισ μζγιςτεσ ςτροφζσ τουσ.
25) Να υπολογιςτεί θ απαιτοφμενθ αντίςταςθ ςτο dc μζροσ του drive που κα μπορζςει να απορροφιςει τθν ενζργεια πζδθςθσ. Να επιλεγεί από τον ςυνοδευτικό κατάλογο του καταςκευαςτι.
5 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
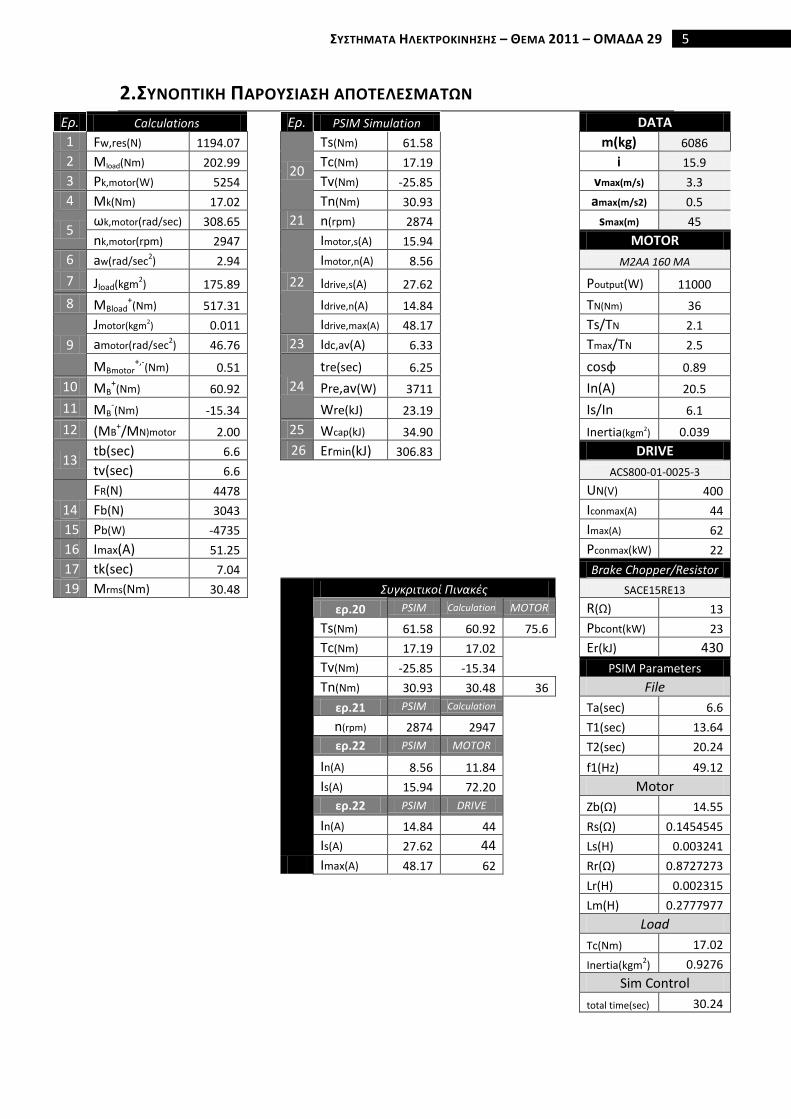
2.ΤΝΟΠΣΙΚΗ ΠΑΡΟΤΙΑΗ ΑΠΟΣΕΛΕΜΑΣΩΝ
Ερ. Calculations
Ερ. PSIM Simulation
DATA
1 Fw,res(N) 1194.07
20
Ts(Nm) 61.58
m(kg) 6086
2 Mload(Nm) 202.99
Tc(Nm) 17.19
i 15.9
3 Pk,motor(W) 5254
Tv(Nm) -25.85
vmax(m/s) 3.3
4 Mk(Nm) 17.02
Tn(Nm) 30.93
amax(m/s2) 0.5
5 ωk,motor(rad/sec) 308.65
21 n(rpm) 2874
smax(m) 45
nk,motor(rpm) 2947
22
Imotor,s(A) 15.94
MOTOR
6 aw(rad/sec2) 2.94
Imotor,n(A) 8.56
M2AA 160 MA
7 Jload(kgm2) 175.89
Idrive,s(A) 27.62
Poutput(W) 11000
8 MBload+(Nm) 517.31
Idrive,n(A) 14.84
TN(Nm) 36
9
Jmotor(kgm2) 0.011
Idrive,max(A) 48.17
Ts/TN 2.1
amotor(rad/sec2) 46.76
23 Idc,av(A) 6.33
Tmax/TN 2.5
MBmotor+,-
(Nm) 0.51
24
tre(sec) 6.25
cosφ 0.89
10 MB+(Nm) 60.92
Pre,av(W) 3711
In(A) 20.5
11 MB-(Nm) -15.34
Wre(kJ) 23.19
Is/In 6.1
12 (MB+/MN)motor 2.00
25 Wcap(kJ) 34.90
Inertia(kgm2) 0.039
13 tb(sec) 6.6
26 Ermin(kJ) 306.83
DRIVE
tv(sec) 6.6
ACS800-01-0025-3
14
FR(N) 4478
UN(V) 400
Fb(N) 3043
Iconmax(A) 44
15 Pb(W) -4735
Imax(A) 62
16 Imax(A) 51.25
Pconmax(kW) 22
17 tk(sec) 7.04
Brake Chopper/Resistor
19 Mrms(Nm) 30.48
υγκριτικοί Πινακζσ
SACE15RE13
ερ.20 PSIM Calculation MOTOR
R(Ω) 13
PSI
M Ts(Nm) 61.58 60.92 75.6
Pbcont(kW) 23
Tc(Nm) 17.19 17.02
Er(kJ) 430
Tv(Nm) -25.85 -15.34
PSIM Parameters
Tn(Nm) 30.93 30.48 36
File
ερ.21 PSIM Calculation
Ta(sec) 6.6
n(rpm) 2874 2947
T1(sec) 13.64
ερ.22 PSIM MOTOR
T2(sec) 20.24
In(A) 8.56 11.84
f1(Hz) 49.12
Is(A) 15.94 72.20
Motor
ερ.22 PSIM DRIVE
Zb(Ω) 14.55
In(A) 14.84 44
Rs(Ω) 0.1454545
Is(A) 27.62 44
Ls(H) 0.003241
Imax(A) 48.17 62
Rr(Ω) 0.8727273
Lr(H) 0.002315
Lm(H) 0.2777977
Load
Tc(Nm) 17.02
Inertia(kgm
2) 0.9276
Sim Control
total time(sec) 30.24
6 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
3.ΑΝΑΛΤΣΙΚΟΙ ΤΠΟΛΟΓΙΜΟΙ & ΕΠΕΞΗΓΗΕΙ
3.1.Κινηςη με ςταθερή ταχφτητα
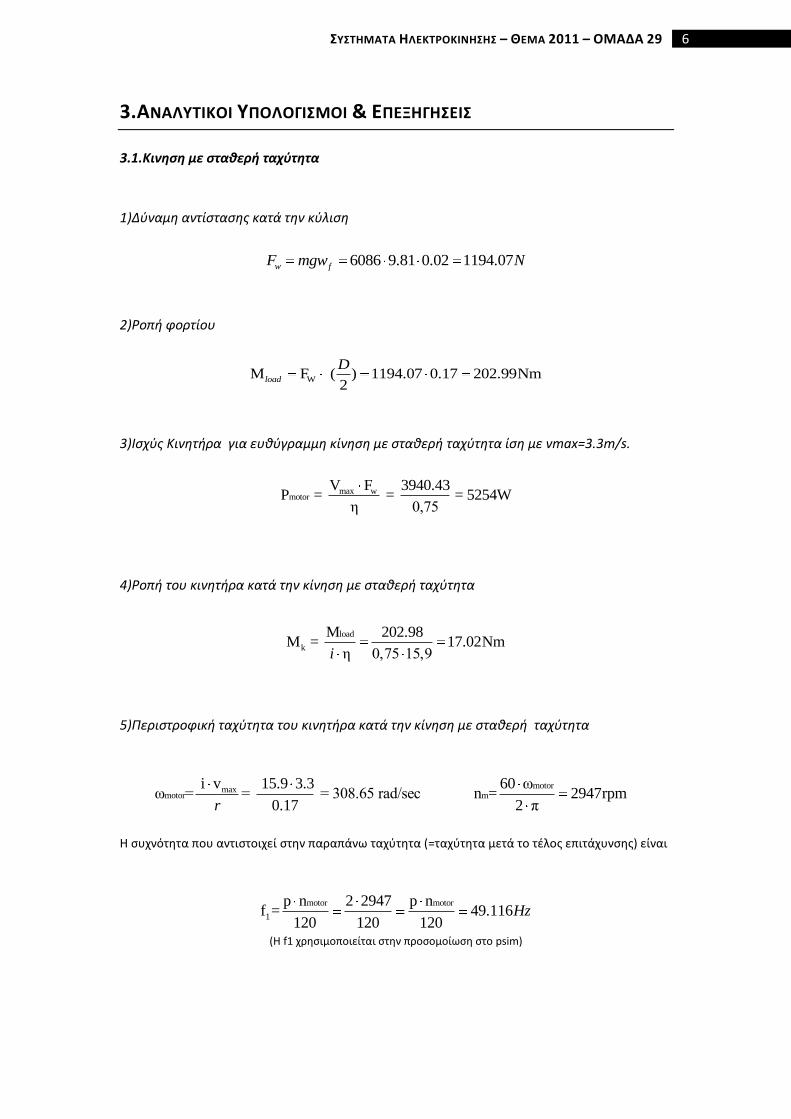
1)Δφναμθ αντίςταςθσ κατά τθν κφλιςθ
6086 9.81 0.02 1194.07w fF mgw N
2)Ροπι φορτίου
WM F ( ) 1194.07 0.17 202.99Nm2
load
D
3)Ιςχφσ Κινθτιρα για ευκφγραμμθ κίνθςθ με ςτακερι ταχφτθτα ίςθ με vmax=3.3m/s.
max wmotor
V F 3940.43P = = = 5254W
η 0,75
4)Ροπι του κινθτιρα κατά τθν κίνθςθ με ςτακερι ταχφτθτα
load k
M 202.98M = 17.02Nm
η 0,75 15,9i
5)Περιςτροφικι ταχφτθτα του κινθτιρα κατά τθν κίνθςθ με ςτακερι ταχφτθτα
maxmotor
i v 15.9 3.3ω = = = 308.65 rad/sec
0.17r
motorm
60 ωn = 2947rpm
2 π
Η ςυχνότθτα που αντιςτοιχεί ςτθν παραπάνω ταχφτθτα (=ταχφτθτα μετά το τζλοσ επιτάχυνςθσ) είναι
motor motor
1
p n 2 2947 p nf = 49.116
120 120 120Hz
(Η f1 χρθςιμοποιείται ςτθν προςομοίωςθ ςτο psim)
7 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
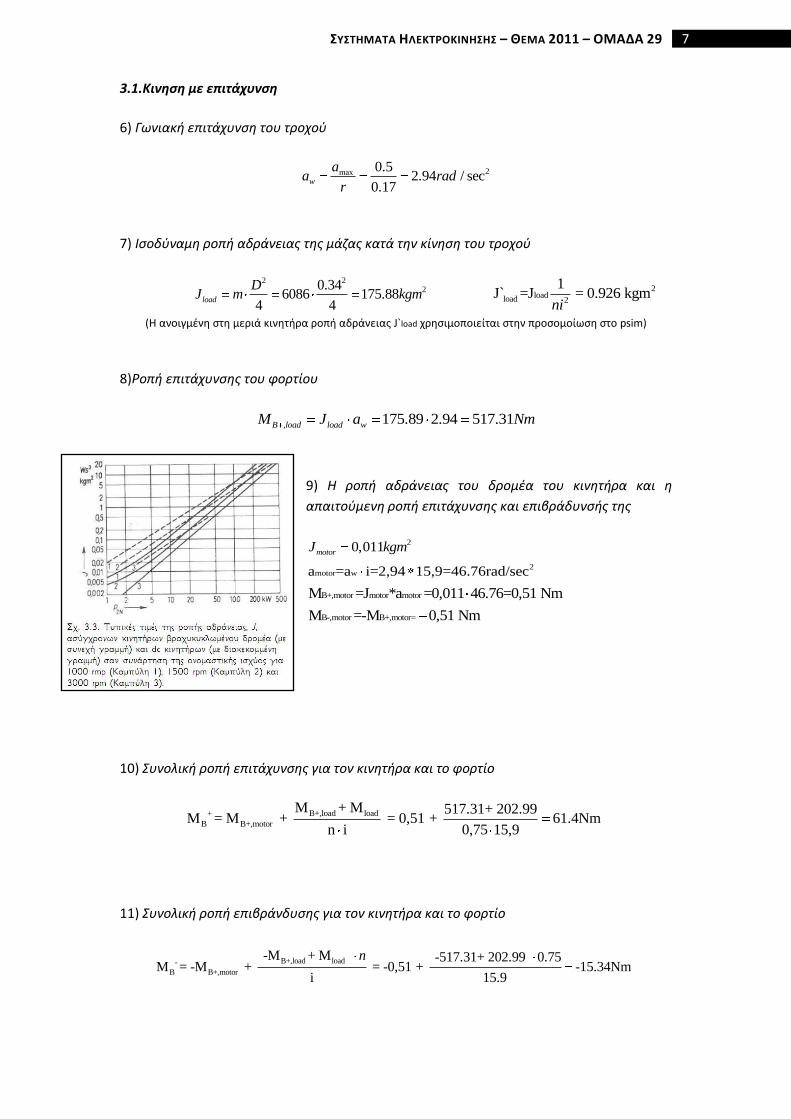
3.1.Κινηςη με επιτάχυνςη
6) Γωνιακι επιτάχυνςθ του τροχοφ
2max 0.52.94 / sec
0.17w
aa rad
r
7) Ιςοδφναμθ ροπι αδράνειασ τθσ μάηασ κατά τθν κίνθςθ του τροχοφ
2 220.34
6086 175.884 4
load
DJ m kgm
2load load 2
1J` =J = 0.926 kgm
ni (Η ανοιγμζνθ ςτθ μεριά κινθτιρα ροπι αδράνειασ J`load χρθςιμοποιείται ςτθν προςομοίωςθ ςτο psim)
8)Ροπι επιτάχυνςθσ του φορτίου
, 175.89 2.94 517.31B load load wM J a Nm
9) Η ροπι αδράνειασ του δρομζα του κινθτιρα και θ
απαιτοφμενθ ροπι επιτάχυνςθσ και επιβράδυνςισ τθσ
20,011motorJ kgm
2motor wa =a i=2,94 15,9=46.76rad/sec
B+,motor motor motor M =J *a =0,011 46.76=0,51 Nm
B-,motor B+,motor=M =-M 0,51 Nm
10) υνολικι ροπι επιτάχυνςθσ για τον κινθτιρα και το φορτίο
B+,load load+ B B+,motor
M + M 517.31+ 202.99M = M + = 0,51 + 61.4Nm
n i 0,75 15,9
11) υνολικι ροπι επιβράνδυςθσ για τον κινθτιρα και το φορτίο
B+,load load- B B+,motor
-M + M -517.31+ 202.99 0.75M = -M + = -0,51 + -15.34Nm
i 15.9
n
8 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
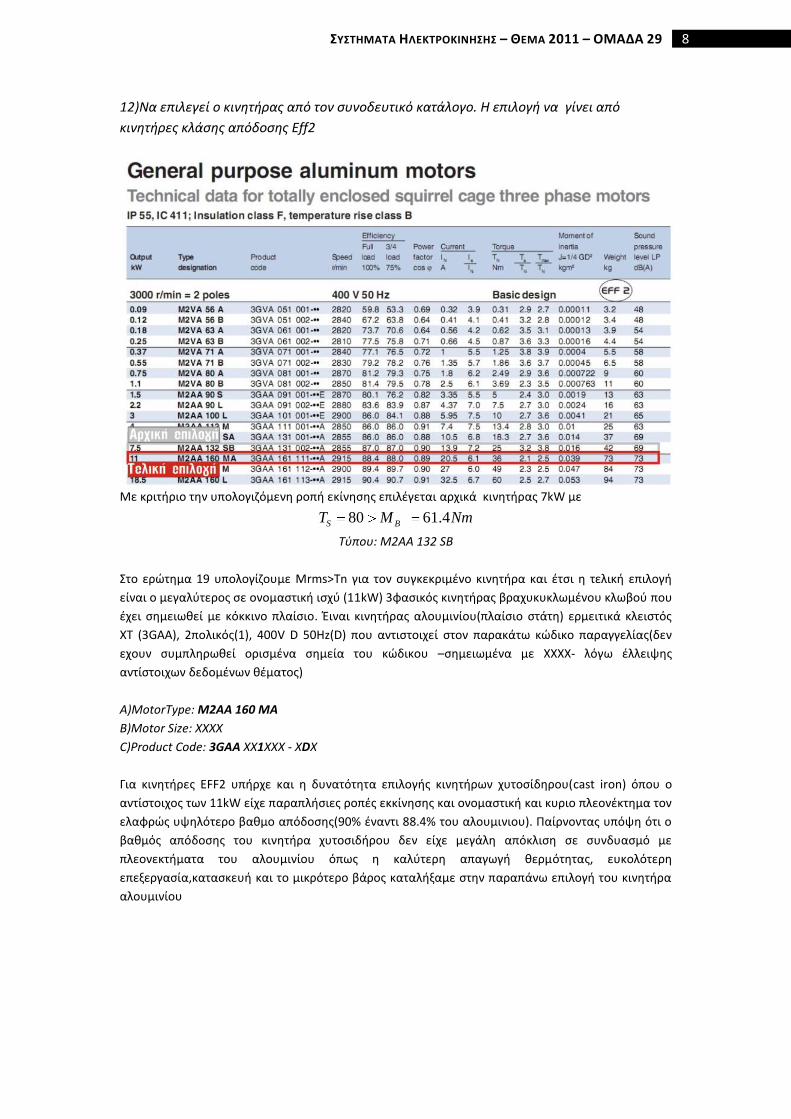
12)Να επιλεγεί ο κινθτιρασ από τον ςυνοδευτικό κατάλογο. Η επιλογι να γίνει από
κινθτιρεσ κλάςθσ απόδοςθσ Eff2
Με κριτιριο τθν υπολογιηόμενθ ροπι εκίνθςθσ επιλζγεται αρχικά κινθτιρασ 7kW με
80 61.4S BT M Nm
Σφπου: M2AA 132 SB
Στο ερϊτθμα 19 υπολογίηουμε Μrms>Tn για τον ςυγκεκριμζνο κινθτιρα και ζτςι θ τελικι επιλογι
είναι o μεγαλφτεροσ ςε ονομαςτικι ιςχφ (11kW) 3φαςικόσ κινθτιρασ βραχυκυκλωμζνου κλωβοφ που
ζχει ςθμειωκεί με κόκκινο πλαίςιο. Ζιναι κινθτιρασ αλουμινίου(πλαίςιο ςτάτθ) ερμειτικά κλειςτόσ
ΧΤ (3GAA), 2πολικόσ(1), 400V D 50Hz(D) που αντιςτοιχεί ςτον παρακάτω κϊδικο παραγγελίασ(δεν
εχουν ςυμπλθρωκεί οριςμζνα ςθμεία του κϊδικου –ςθμειωμζνα με ΧΧΧΧ- λόγω ζλλειψθσ
αντίςτοιχων δεδομζνων κζματοσ)
A)MotorType: M2AA 160 MA
B)Motor Size: XXXX
C)Product Code: 3GAA XX1XXX - XDX
Για κινθτιρεσ EFF2 υπιρχε και θ δυνατότθτα επιλογισ κινθτιρων χυτοςίδθρου(cast iron) όπου ο
αντίςτοιχοσ των 11kW είχε παραπλιςιεσ ροπζσ εκκίνθςθσ και ονομαςτικι και κυριο πλεονζκτθμα τον
ελαφρϊσ υψθλότερο βακμο απόδοςθσ(90% ζναντι 88.4% του αλουμινιου). Παίρνοντασ υπόψθ ότι ο
βακμόσ απόδοςθσ του κινθτιρα χυτοςιδιρου δεν είχε μεγάλθ απόκλιςθ ςε ςυνδυαςμό με
πλεονεκτιματα του αλουμινίου όπωσ θ καλφτερθ απαγωγι κερμότθτασ, ευκολότερθ
επεξεργαςία,καταςκευι και το μικρότερο βάροσ καταλιξαμε ςτθν παραπάνω επιλογι του κινθτιρα
αλουμινίου
9 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
13)Χρόνοσ επιτάχυνςθσ και επιβράδυνςθσ
max
max
3.3= 6.6sec
0.5v b
Vt t
a
14)Να γίνει ζλεγχοσ για τθν πικανότθτα διολίςκθςθσ (spin) του τροχοφ κατά τθν επιτάχυνςθ.
Να κεωριςετε ότι το βάροσ μοιράηεται ςτισ δφο ςιδθροτροχιζσ κφλιςθσ του τροχοφ.
Rμ m g 0,15 6086 9,81
F = = =4478 N2 2
maxbF = a m = 0,5 6086=3043N
R = bF 4478> F 3043
Η δφναμθ τθσ τριβισ Fr είναι μεγαλφτερθ τθσ δφναμθσ επιτάχυνςθσ Fb οπότε δεν υπάρχει κίνδυνοσ
διολίςκθςθσ τροχοφ
15) Μζγιςτθ ιςχφσ πζδθςθσ
-
-b motor
BP =M ω = -15.34 308.65 4735W
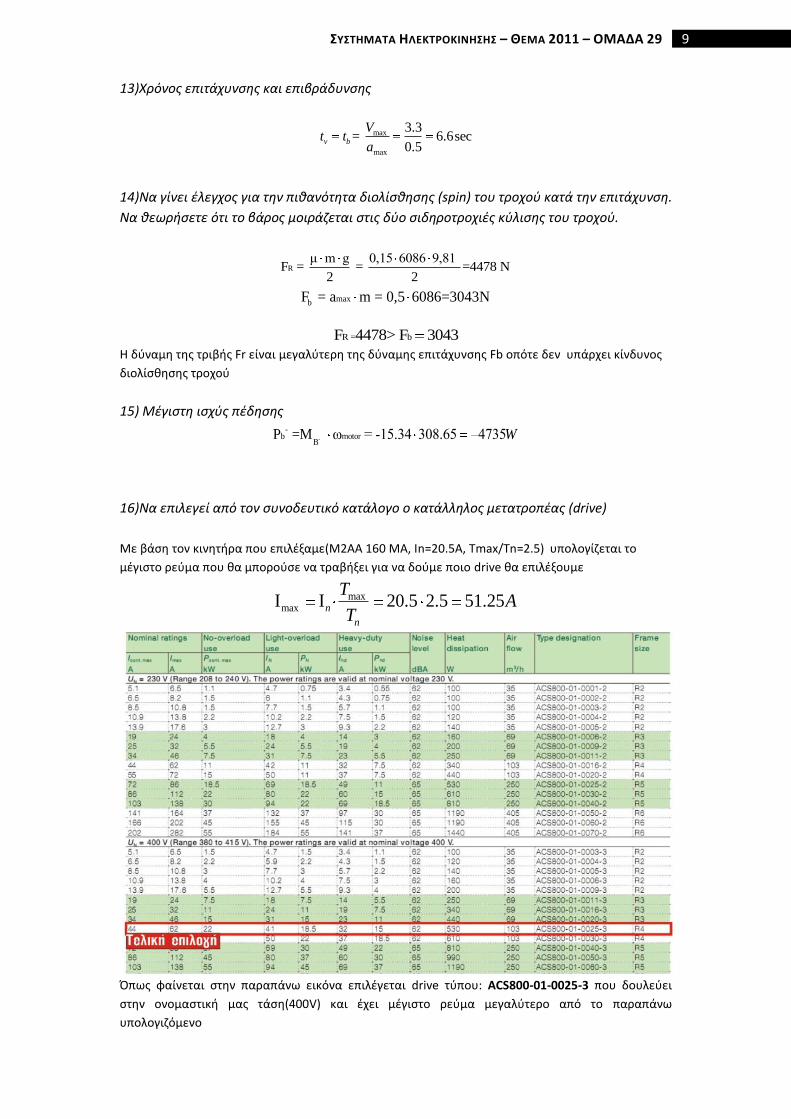
16)Να επιλεγεί από τον ςυνοδευτικό κατάλογο ο κατάλλθλοσ μετατροπζασ (drive)
Με βάςθ τον κινθτιρα που επιλζξαμε(M2AA 160 MA, Ιn=20.5A, Tmax/Tn=2.5) υπολογίηεται το
μζγιςτο ρεφμα που κα μποροφςε να τραβιξει για να δοφμε ποιο drive κα επιλζξουμε
maxmaxI I 20.5 2.5 51.25n
n
TA
T
Όπωσ φαίνεται ςτθν παραπάνω εικόνα επιλζγεται drive τφπου: ACS800-01-0025-3 που δουλεφει
ςτθν ονομαςτικι μασ τάςθ(400V) και ζχει μζγιςτο ρεφμα μεγαλφτερο από το παραπάνω
υπολογιηόμενο
10 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
17)Να υπολογιςκεί ο χρόνοσ tk, κατά τον οποίο ζχουμε κίνθςθ με ςτακερι ταχφτθτα.
Ολοκλθρϊνοντασ διαςτιματα από profile ταχιτθτασ
max maxmax maxS =
2 2
b bk
V t V tt V
(αφοφ tv=tb)
45= 3.3 b kt t
13.64 6.6 7.04seckt
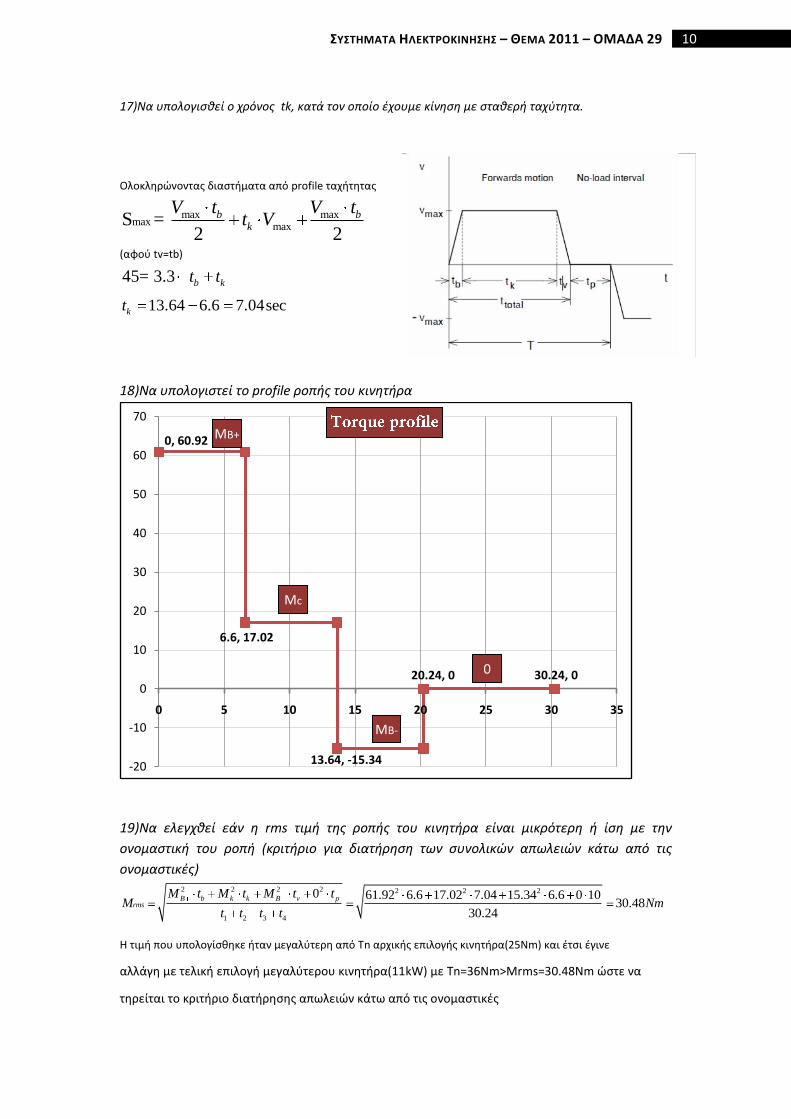
18)Να υπολογιςτεί το profile ροπισ του κινθτιρα
19)Να ελεγχκεί εάν θ rms τιμι τθσ ροπισ του κινθτιρα είναι μικρότερθ ι ίςθ με τθν
ονομαςτικι του ροπι (κριτιριο για διατιρθςθ των ςυνολικών απωλειών κάτω από τισ
ονομαςτικζσ) 2 2 2 2 2 2 2
1 2 3 4
0 61.92 6.6 17.02 7.04 15.34 6.6 0 1030.48
30.24
B b k k B v prms
M t M t M t tM Nm
t t t t
Η τιμι που υπολογίςκθκε ιταν μεγαλφτερθ από Τn αρχικισ επιλογισ κινθτιρα(25Νm) και ζτςι ζγινε
αλλάγθ με τελικι επιλογι μεγαλφτερου κινθτιρα(11kW) με Τn=36Nm>Mrms=30.48Nm ϊςτε να
τθρείται το κριτιριο διατιρθςθσ απωλειϊν κάτω από τισ ονομαςτικζσ
0, 60.92
6.6, 17.02
13.64, -15.34
20.24, 0 30.24, 0
-20
-10
0
10
20
30
40
50
60
70
0 5 10 15 20 25 30 35
MB+
Mc
MB-
MB+
Mc
MB-
0
11 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
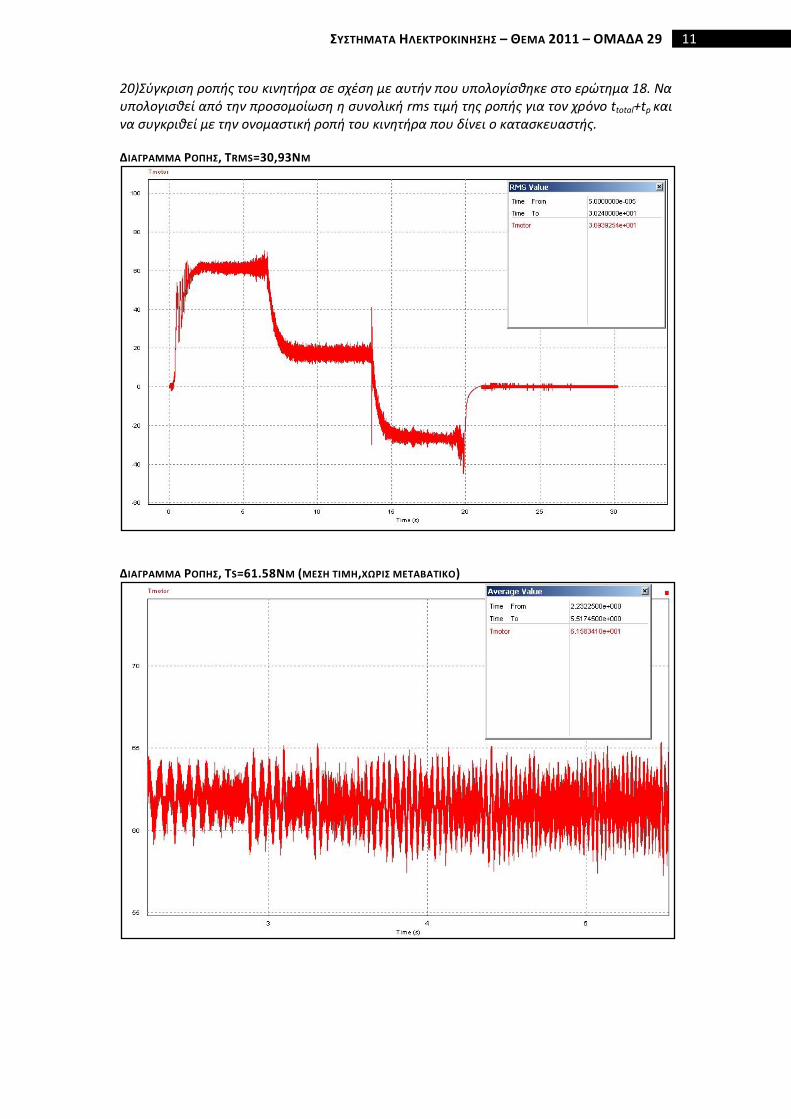
20)φγκριςθ ροπισ του κινθτιρα ςε ςχζςθ με αυτιν που υπολογίςκθκε ςτο ερώτθμα 18. Να υπολογιςκεί από τθν προςομοίωςθ θ ςυνολικι rms τιμι τθσ ροπισ για τον χρόνο ttotal+tp και να ςυγκρικεί με τθν ονομαςτικι ροπι του κινθτιρα που δίνει ο καταςκευαςτισ. ΔΙΑΓΡΑΜΜΑ ΡΟΠΗ, TRMS=30,93NM
ΔΙΑΓΡΑΜΜΑ ΡΟΠΗ, TS=61.58NM (ΜΕΗ ΣΙΜΗ,ΧΩΡΙ ΜΕΣΑΒΑΣΙΚΟ)
12 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
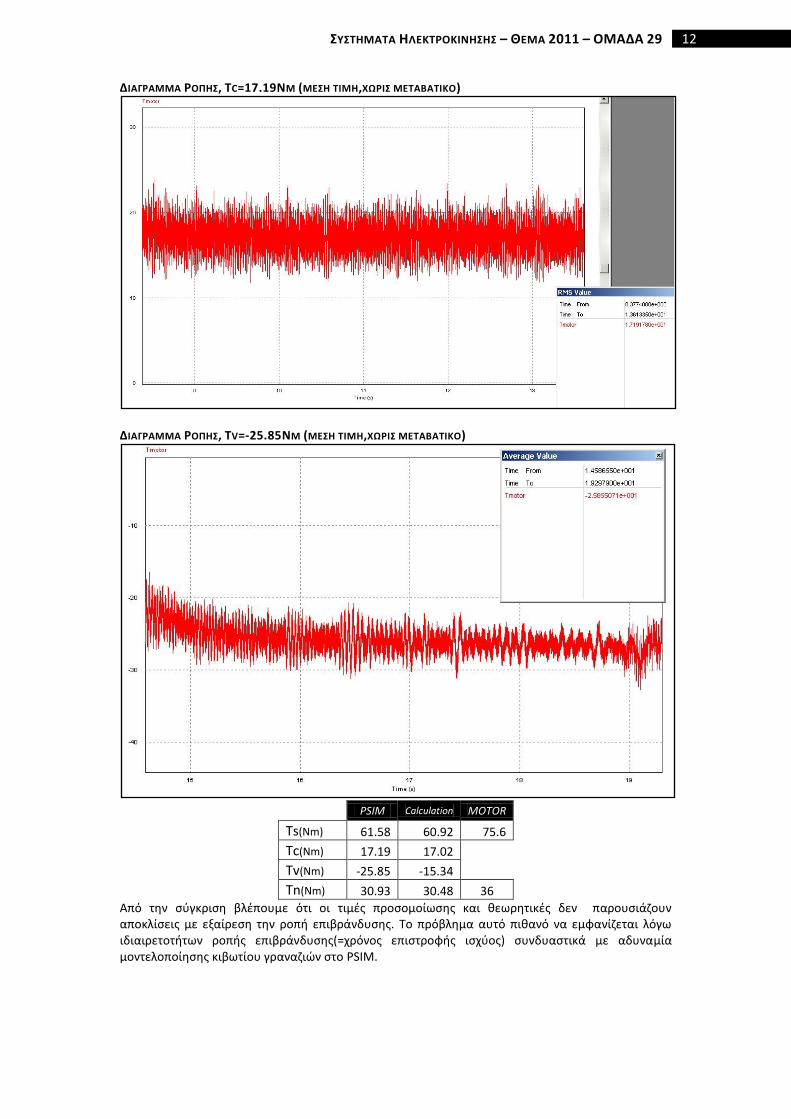
ΔΙΑΓΡΑΜΜΑ ΡΟΠΗ, TC=17.19NM (ΜΕΗ ΣΙΜΗ,ΧΩΡΙ ΜΕΣΑΒΑΣΙΚΟ)
ΔΙΑΓΡΑΜΜΑ ΡΟΠΗ, TV=-25.85NM (ΜΕΗ ΣΙΜΗ,ΧΩΡΙ ΜΕΣΑΒΑΣΙΚΟ)
PSIM Calculation MOTOR
Ts(Nm) 61.58 60.92 75.6
Tc(Nm) 17.19 17.02
Tv(Nm) -25.85 -15.34
Tn(Nm) 30.93 30.48 36
Από τθν ςφγκριςθ βλζπουμε ότι οι τιμζσ προςομοίωςθσ και κεωρθτικζσ δεν παρουςιάηουν αποκλίςεισ με εξαίρεςθ τθν ροπι επιβράνδυςθσ. Το πρόβλθμα αυτό πικανό να εμφανίηεται λόγω ιδιαιρετοτιτων ροπισ επιβράνδυςθσ(=χρόνοσ επιςτροφισ ιςχφοσ) ςυνδυαςτικά με αδυναμία μοντελοποίθςθσ κιβωτίου γραναηιϊν ςτο PSIM.
13 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
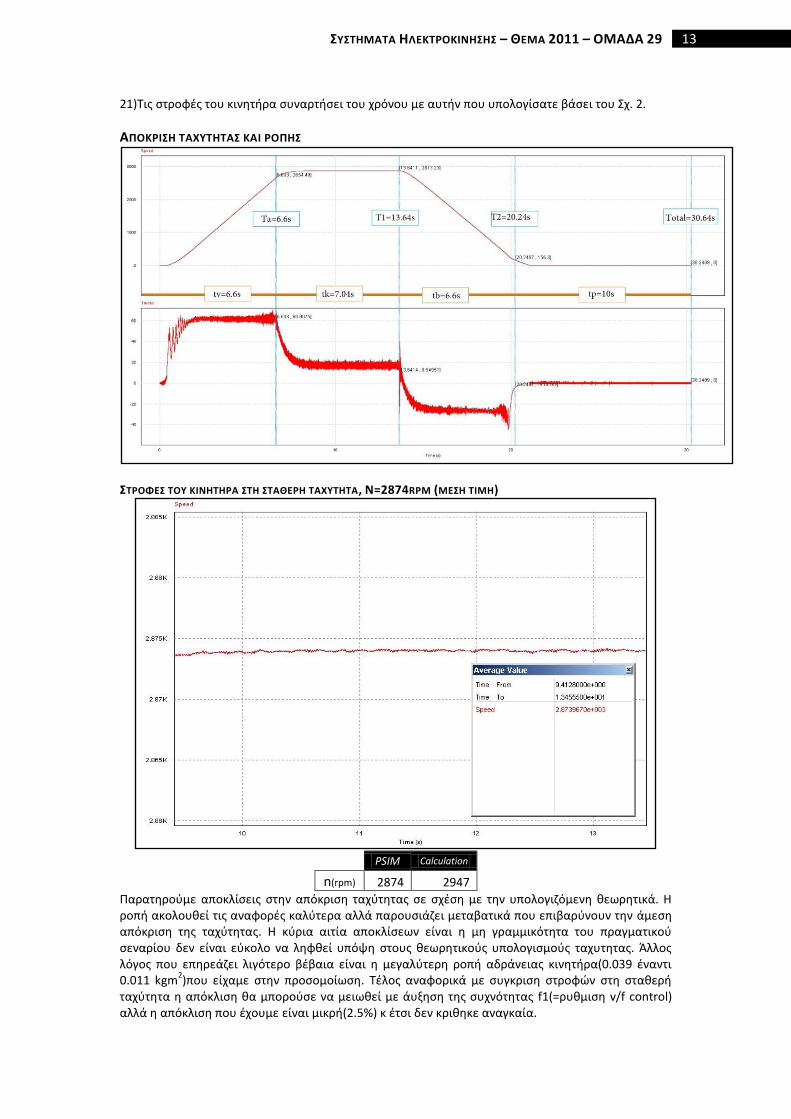
21)Τισ ςτροφζσ του κινθτιρα ςυναρτιςει του χρόνου με αυτιν που υπολογίςατε βάςει του Σχ. 2.
ΑΠΟΚΡΙΗ ΣΑΧΤΣΗΣΑ ΚΑΙ ΡΟΠΗ
ΣΡΟΦΕ ΣΟΤ ΚΙΝΗΣΗΡΑ ΣΗ ΣΑΘΕΡΗ ΣΑΧΤΣΗΣΑ, Ν=2874RPM (ΜΕΗ ΣΙΜΗ)
PSIM Calculation
n(rpm) 2874 2947
Παρατθροφμε αποκλίςεισ ςτθν απόκριςθ ταχφτθτασ ςε ςχζςθ με τθν υπολογιηόμενθ κεωρθτικά. Η ροπι ακολουκεί τισ αναφορζσ καλφτερα αλλά παρουςιάηει μεταβατικά που επιβαρφνουν τθν άμεςθ απόκριςθ τθσ ταχφτθτασ. Η κφρια αιτία αποκλίςεων είναι θ μθ γραμμικότθτα του πραγματικοφ ςεναρίου δεν είναι εφκολο να λθφκεί υπόψθ ςτουσ κεωρθτικοφσ υπολογιςμοφσ ταχυτθτασ. Άλλοσ λόγοσ που επθρεάηει λιγότερο βζβαια είναι θ μεγαλφτερθ ροπι αδράνειασ κινθτιρα(0.039 ζναντι 0.011 kgm
2)που είχαμε ςτθν προςομοίωςθ. Τζλοσ αναφορικά με ςυγκριςθ ςτροφϊν ςτθ ςτακερι
ταχφτθτα θ απόκλιςθ κα μποροφςε να μειωκεί με άυξθςθ τθσ ςυχνότθτασ f1(=ρυκμιςθ v/f control) αλλά θ απόκλιςθ που ζχουμε είναι μικρι(2.5%) κ ζτςι δεν κρικθκε αναγκαία.
14 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
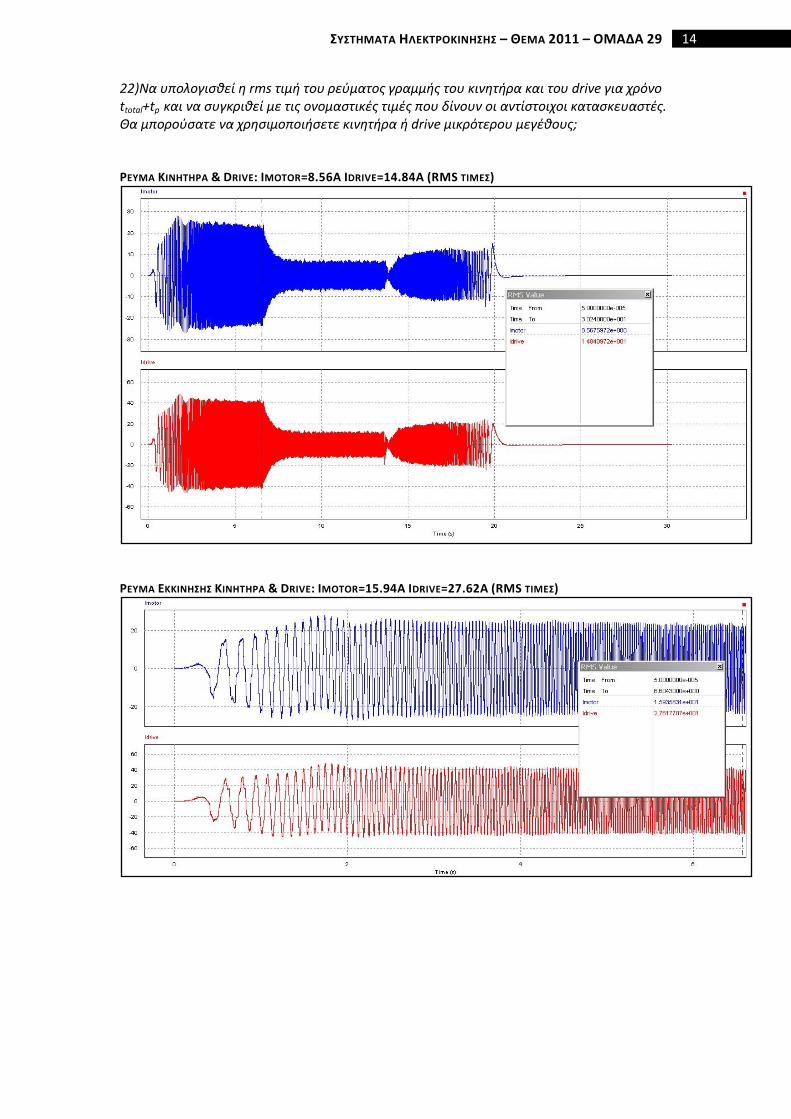
22)Να υπολογιςκεί θ rms τιμι του ρεφματοσ γραμμισ του κινθτιρα και του drive για χρόνο ttotal+tp και να ςυγκρικεί με τισ ονομαςτικζσ τιμζσ που δίνουν οι αντίςτοιχοι καταςκευαςτζσ. Θα μποροφςατε να χρθςιμοποιιςετε κινθτιρα ι drive μικρότερου μεγζκουσ; ΡΕΤΜΑ ΚΙΝΗΣΗΡΑ & DRIVE: IMOTOR=8.56A ΙDRIVE=14.84A (RMS ΣΙΜΕ)
ΡΕΤΜΑ ΕΚΚΙΝΗΗ ΚΙΝΗΣΗΡΑ & DRIVE: IMOTOR=15.94A ΙDRIVE=27.62A (RMS ΣΙΜΕ)
15 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
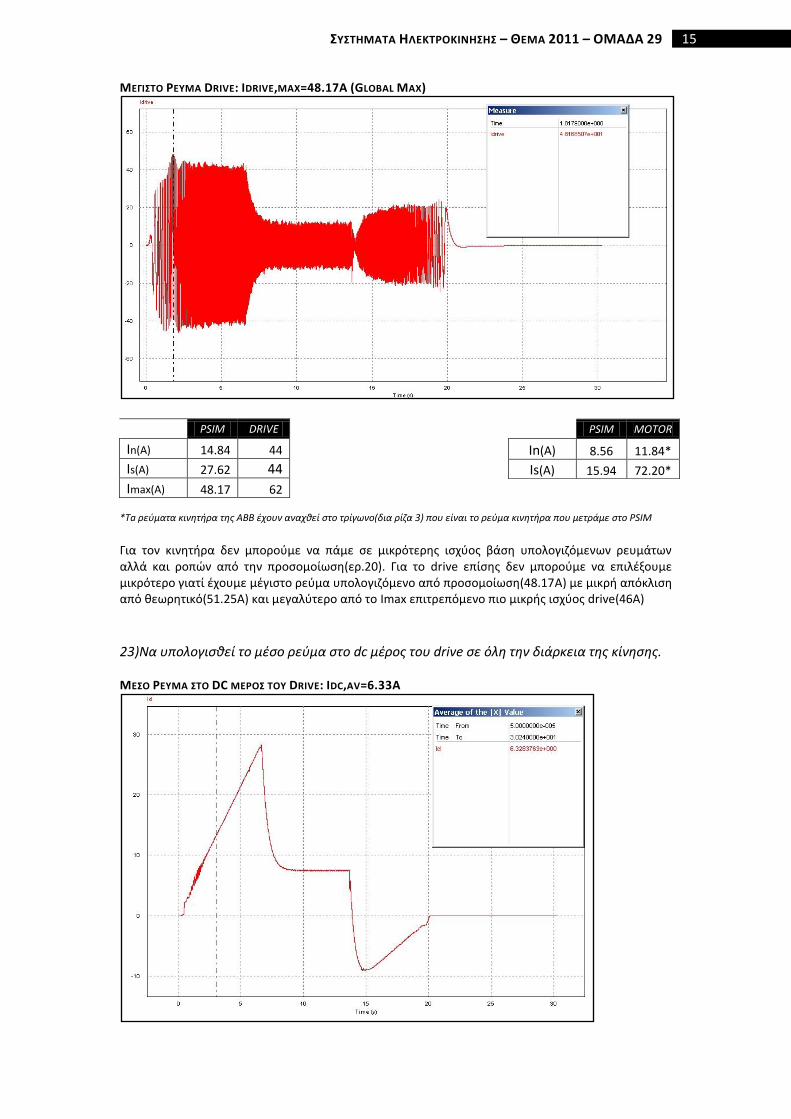
ΜΕΓΙΣΟ ΡΕΤΜΑ DRIVE: ΙDRIVE,MAX=48.17A (GLOBAL MAX)
ερ.22 PSIM DRIVE
In(A) 14.84 44
Is(A) 27.62 44
Imax(A) 48.17 62 *Σa ρεφματα κινθτιρα τθσ ΑΒΒ ζχουν αναχκεί ςτο τρίγωνο(δια ρίηα 3) που είναι το ρεφμα κινθτιρα που μετράμε ςτο PSIM Για τον κινθτιρα δεν μποροφμε να πάμε ςε μικρότερθσ ιςχφοσ βάςθ υπολογιηόμενων ρευμάτων αλλά και ροπϊν από τθν προςομοίωςθ(ερ.20). Για το drive επίςθσ δεν μποροφμε να επιλζξουμε μικρότερο γιατί ζχουμε μζγιςτο ρεφμα υπολογιηόμενο από προςομοίωςθ(48.17A) με μικρι απόκλιςθ από κεωρθτικό(51.25A) και μεγαλφτερο από το Imax επιτρεπόμενο πιο μικρισ ιςχφοσ drive(46A)
23)Να υπολογιςκεί το μζςο ρεφμα ςτο dc μζροσ του drive ςε όλθ τθν διάρκεια τθσ κίνθςθσ. ΜΕΟ ΡΕΤΜΑ ΣΟ DC ΜΕΡΟ ΣΟΤ DRIVE: ΙDC,AV=6.33A
PSIM MOTOR
In(A) 8.56 11.84*
Is(A) 15.94 72.20*
16 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
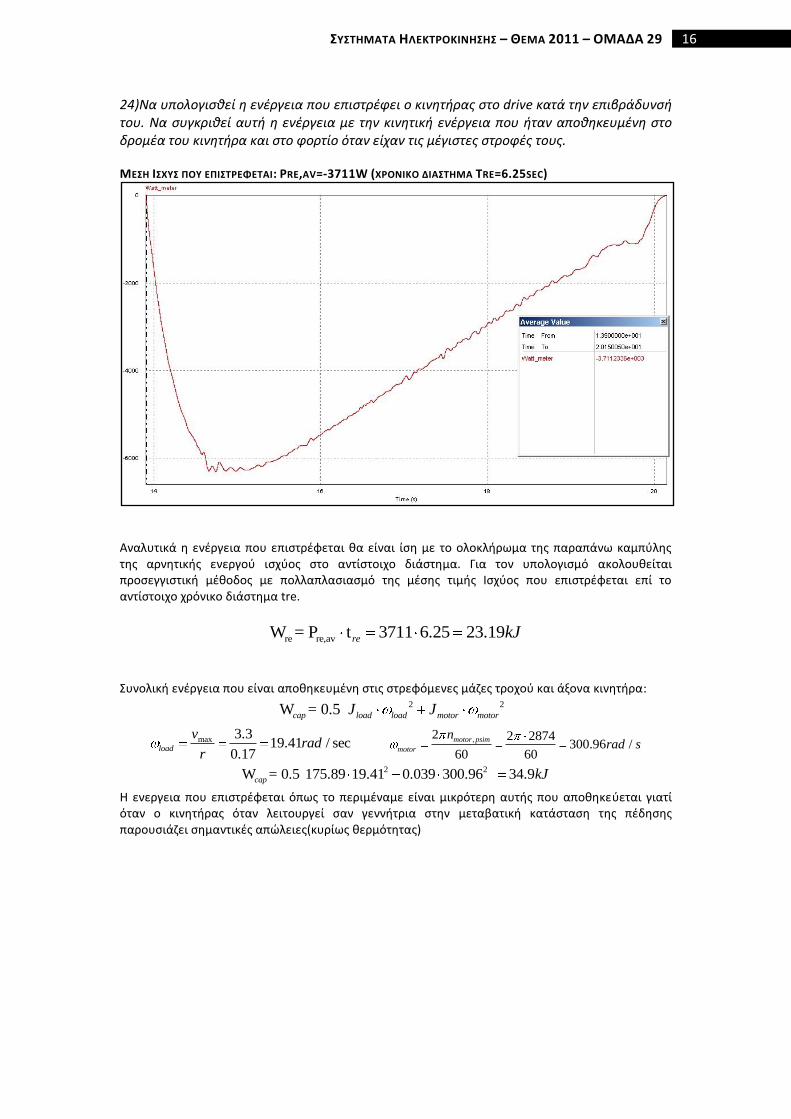
24)Να υπολογιςκεί θ ενζργεια που επιςτρζφει ο κινθτιρασ ςτο drive κατά τθν επιβράδυνςι του. Να ςυγκρικεί αυτι θ ενζργεια με τθν κινθτικι ενζργεια που ιταν αποκθκευμζνθ ςτο δρομζα του κινθτιρα και ςτο φορτίο όταν είχαν τισ μζγιςτεσ ςτροφζσ τουσ. ΜΕΗ ΙΧΤ ΠΟΤ ΕΠΙΣΡΕΦΕΣΑΙ: PRE,AV=-3711W (ΧΡΟΝΙΚΟ ΔΙΑΣΗΜΑ TRE=6.25SEC)
Αναλυτικά θ ενζργεια που επιςτρζφεται κα είναι ίςθ με το ολοκλιρωμα τθσ παραπάνω καμπφλθσ τθσ αρνθτικισ ενεργοφ ιςχφοσ ςτο αντίςτοιχο διάςτθμα. Για τον υπολογιςμό ακολουκείται προςεγγιςτικι μζκοδοσ με πολλαπλαςιαςμό τθσ μζςθσ τιμισ Ιςχφοσ που επιςτρζφεται επί το αντίςτοιχο χρόνικο διάςτθμα tre.
re re,avW = P t 3711 6.25 23.19re kJ
Συνολικι ενζργεια που είναι αποκθκευμζνθ ςτισ ςτρεφόμενεσ μάηεσ τροχοφ και άξονα κινθτιρα:
2 2W = 0.5cap load load motor motorJ J
max 3.319.41 / sec
0.17load
vrad
r ,2 2 2874
300.96 /60 60
motor psim
motor
nrad s
2 2W = 0.5 175.89 19.41 0.039 300.96 34.9cap kJ
Η ενεργεια που επιςτρζφεται όπωσ το περιμζναμε είναι μικρότερθ αυτισ που αποκθκεφεται γιατί όταν ο κινθτιρασ όταν λειτουργεί ςαν γεννιτρια ςτθν μεταβατικι κατάςταςθ τθσ πζδθςθσ παρουςιάηει ςθμαντικζσ απϊλειεσ(κυρίωσ κερμότθτασ)
17 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
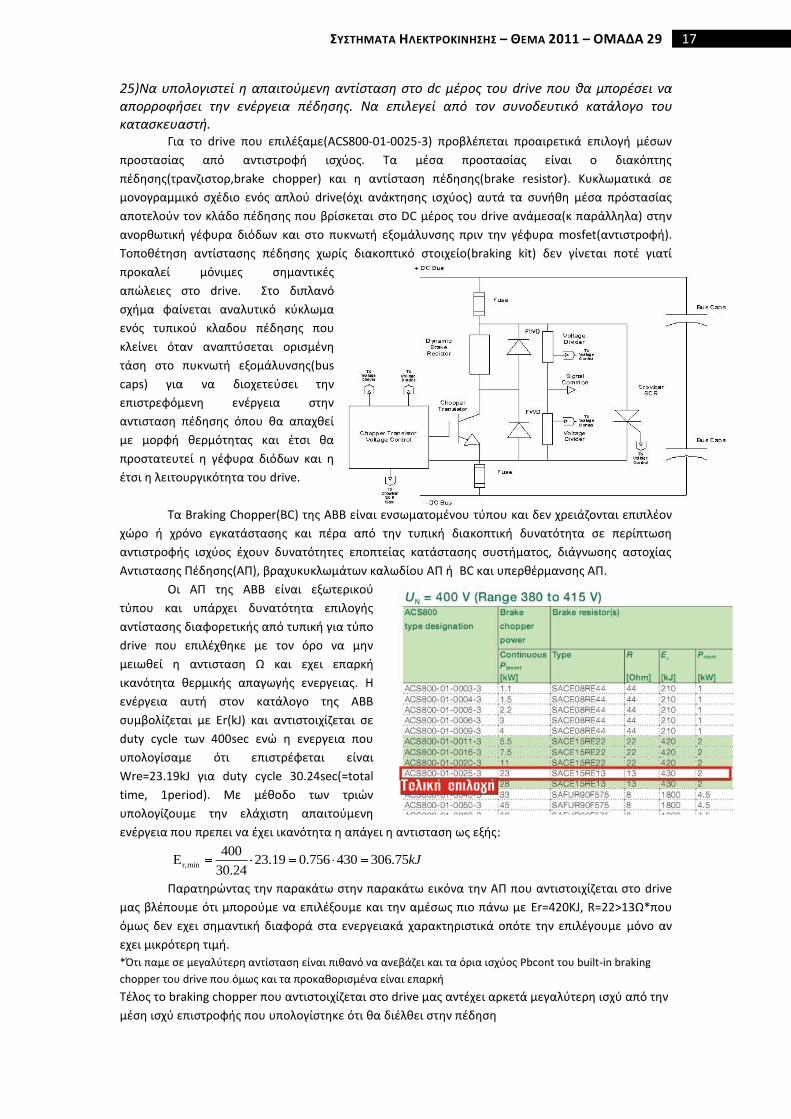
25)Να υπολογιςτεί θ απαιτοφμενθ αντίςταςθ ςτο dc μζροσ του drive που κα μπορζςει να απορροφιςει τθν ενζργεια πζδθςθσ. Να επιλεγεί από τον ςυνοδευτικό κατάλογο του καταςκευαςτι.
Για το drive που επιλζξαμε(ACS800-01-0025-3) προβλζπεται προαιρετικά επιλογι μζςων
προςταςίασ από αντιςτροφι ιςχφοσ. Τα μζςα προςταςίασ είναι ο διακόπτθσ
πζδθςθσ(τρανηιςτορ,brake chopper) και θ αντίςταςθ πζδθςθσ(brake resistor). Κυκλωματικά ςε
μονογραμμικό ςχζδιο ενόσ απλοφ drive(όχι ανάκτθςθσ ιςχφοσ) αυτά τα ςυνικθ μζςα πρόςταςίασ
αποτελοφν τον κλάδο πζδθςθσ που βρίςκεται ςτο DC μζροσ του drive ανάμεςα(κ παράλλθλα) ςτθν
ανορκωτικι γζφυρα διόδων και ςτο πυκνωτι εξομάλυνςθσ πριν τθν γζφυρα mosfet(αντιςτροφι).
Τοποκζτθςθ αντίςταςθσ πζδθςθσ χωρίσ διακοπτικό ςτοιχείο(braking kit) δεν γίνεται ποτζ γιατί
προκαλεί μόνιμεσ ςθμαντικζσ
απϊλειεσ ςτο drive. Στο διπλανό
ςχιμα φαίνεται αναλυτικό κφκλωμα
ενόσ τυπικοφ κλαδου πζδθςθσ που
κλείνει όταν αναπτφςεται οριςμζνθ
τάςθ ςτο πυκνωτι εξομάλυνςθσ(bus
caps) για να διοχετεφςει τθν
επιςτρεφόμενθ ενζργεια ςτθν
αντιςταςθ πζδθςθσ όπου κα απαχκεί
με μορφι κερμότθτασ και ζτςι κα
προςτατευτεί θ γζφυρα διόδων και θ
ζτςι θ λειτουργικότθτα του drive.
Τα Βraking Chopper(BC) τθσ ΑΒΒ είναι ενςωματομζνου τφπου και δεν χρειάηονται επιπλζον
χϊρο ι χρόνο εγκατάςταςθσ και πζρα από τθν τυπικι διακοπτικι δυνατότθτα ςε περίπτωςθ
αντιςτροφισ ιςχφοσ ζχουν δυνατότθτεσ εποπτείασ κατάςταςθσ ςυςτιματοσ, διάγνωςθσ αςτοχίασ
Αντιςταςθσ Πζδθςθσ(ΑΠ), βραχυκυκλωμάτων καλωδίου ΑΠ ι BC και υπερκζρμανςθσ ΑΠ.
Οι ΑΠ τθσ ABB είναι εξωτερικοφ
τφπου και υπάρχει δυνατότθτα επιλογισ
αντίςταςθσ διαφορετικισ από τυπικι για τφπο
drive που επιλζχκθκε με τον όρο να μθν
μειωκεί θ αντιςταςθ Ω και εχει επαρκι
ικανότθτα κερμικισ απαγωγισ ενεργειασ. Η
ενζργεια αυτι ςτον κατάλογο τθσ ΑΒΒ
ςυμβολίηεται με Εr(kJ) και αντιςτοιχίηεται ςε
duty cycle των 400sec ενϊ θ ενεργεια που
υπολογίςαμε ότι επιςτρζφεται είναι
Wre=23.19kJ για duty cycle 30.24sec(=total
time, 1period). Με μζκοδο των τριϊν
υπολογίηουμε τθν ελάχιςτθ απαιτοφμενθ
ενζργεια που πρεπει να ζχει ικανότθτα θ απάγει θ αντιςταςθ ωσ εξισ:
r,min
400E 23.19 0.756 430 306.75
30.24kJ
Παρατθρϊντασ τθν παρακάτω ςτθν παρακάτω εικόνα τθν ΑΠ που αντιςτοιχίηεται ςτο drive
μασ βλζπουμε ότι μποροφμε να επιλζξουμε και τθν αμζςωσ πιο πάνω με Er=420KJ, R=22>13Ω*που
όμωσ δεν εχει ςθμαντικι διαφορά ςτα ενεργειακά χαρακτθριςτικά οπότε τθν επιλζγουμε μόνο αν
εχει μικρότερθ τιμι.
*Ότι παμε ςε μεγαλφτερθ αντίςταςθ είναι πικανό να ανεβάηει και τα όρια ιςχφοσ Pbcont του built-in braking
chopper του drive που όμωσ και τα προκακοριςμζνα είναι επαρκι
Τζλοσ το braking chopper που αντιςτοιχίηεται ςτο drive μασ αντζχει αρκετά μεγαλφτερθ ιςχφ από τθν
μζςθ ιςχφ επιςτροφισ που υπολογίςτθκε ότι κα διζλκει ςτθν πζδθςθ
18 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
4.ΒΙΒΛΙOΓΡΑΦΙΚΗ ΕΡΕΤΝΑ ΓΙΑ ΚΙΝΗΣΗΡΕ EFF2
Με πρωτοβουλία τθσ CEMEP (Comité Européen de Constructeurs de Machines Electriques et
d'Electronique de Puissance) τo 1998 βάςθ εκελοντικισ ςυμφωνίασ ορίςκθκαν τρεισ κατθγορίεσ
απόδοςθσ EFF1(high efficiency motors) , EFF2(improved efficiency motors) και EFF3(standard motors)
κινθτιρων χαμθλισ τάςεωσ τριφαςικοφ ρεφματοσ και ιταν αρκετά επιτυχισ. Για το λόγο αυτό
ανανεϊκθκε το 2006 για άλλα 3 χρόνια. Το ςφςτθμα κατάταξθσ απόδοςθσ ζχει αναγνωριςκεί και
χρθςιμοποιείται ςε πολλζσ χϊρεσ ςε όλο τον κόςμο. Θεςμικά και τεχνικά πρόβλθματα εναρμόνιςθσ
του ςυςτιματοσ κατάταξθσ ςε κάκε χϊρα λφκθκαν όταν θ Διεκνισ Ηλεκτροτεχνικι Επιτροπι IEC
αναπτφξε και δθμοςιεφςε πρότυπο ενεργειακισ απόδοςθσ και πρότυπο για τον προςδιοριςμό τθσ
αποτελεςματικότθτασ κινθτιρα. Το νζο πρότυπο IEC 60034-30 ορίηει και εναρμονίηει ςε παγκόςμιο
επίπεδο τισ κατθγορίεσ απόδοςθσ ΙΕ1, ΙΕ2 και IE3 κινθτιρων χαμθλισ τάςεωσ τριφαςικοφ ρεφματοσ.
Εν τω μεταξφ, θ εκελοντικι ςυμφωνία είχε λιξει. Ωςτόςο, τα εμπορικά ςιματα απόδοςθσ
(EFF1, EFF2 και EFF3) εξακολουκοφν να αποτελοφν ςιμα κατατεκζν. Η χριςθ του εμπορικοφ ςιματοσ
ςτθρίηεται ςε ςυμβατικι ςυμφωνία εκμετάλλευςθσ μεταξφ των ςυμμετεχόντων ςτθν εκελοντικι
ςυμφωνία (καταςκευαςτζσ κινθτιρων) και του κάτοχου διακαιϊματοσ χοριγθςθσ ςιμανςθσ (CEMEP
- Comité Européen de Constructeurs de Machines Electriques et d'Electronique de Puissance). Αυτι θ
ςυμφωνία άδειασ εκμετάλλευςθσ ζλθξε ςτισ 10 Φλεβάρθ του 2010, αλλά μπορεί να επεκτακεί ςε 15
Ιοφνθ του 2011, κατόπιν αιτιματοσ.
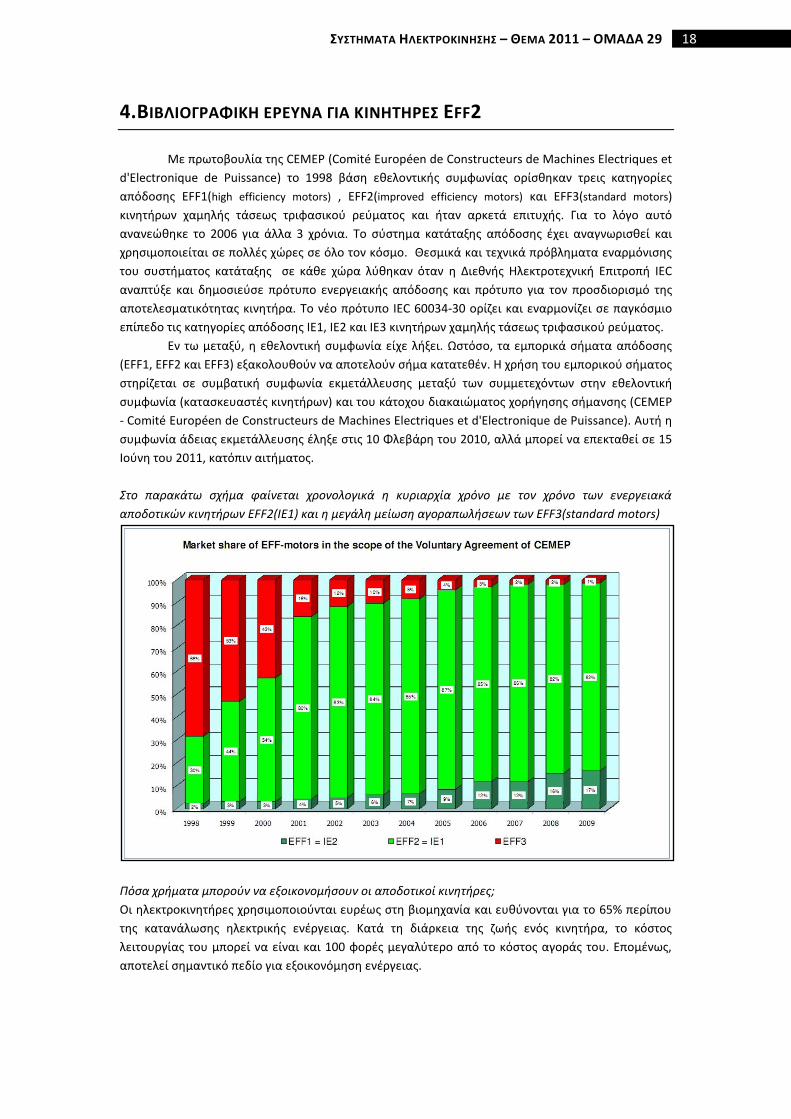
το παρακάτω ςχιμα φαίνεται χρονολογικά θ κυριαρχία χρόνο με τον χρόνο των ενεργειακά
αποδοτικών κινθτιρων EFF2(IE1) και θ μεγάλθ μείωςθ αγοραπωλιςεων των EFF3(standard motors)
Πόςα χριματα μποροφν να εξοικονομιςουν οι αποδοτικοί κινθτιρεσ;
Οι θλεκτροκινθτιρεσ χρθςιμοποιοφνται ευρζωσ ςτθ βιομθχανία και ευκφνονται για το 65% περίπου
τθσ κατανάλωςθσ θλεκτρικισ ενζργειασ. Κατά τθ διάρκεια τθσ ηωισ ενόσ κινθτιρα, το κόςτοσ
λειτουργίασ του μπορεί να είναι και 100 φορζσ μεγαλφτερο από το κόςτοσ αγοράσ του. Επομζνωσ,
αποτελεί ςθμαντικό πεδίο για εξοικονόμθςθ ενζργειασ.
19 ΤΣΗΜΑΣΑ ΗΛΕΚΣΡΟΚΙΝΗΗ – ΘΕΜΑ 2011 – ΟΜΑΔΑ 29
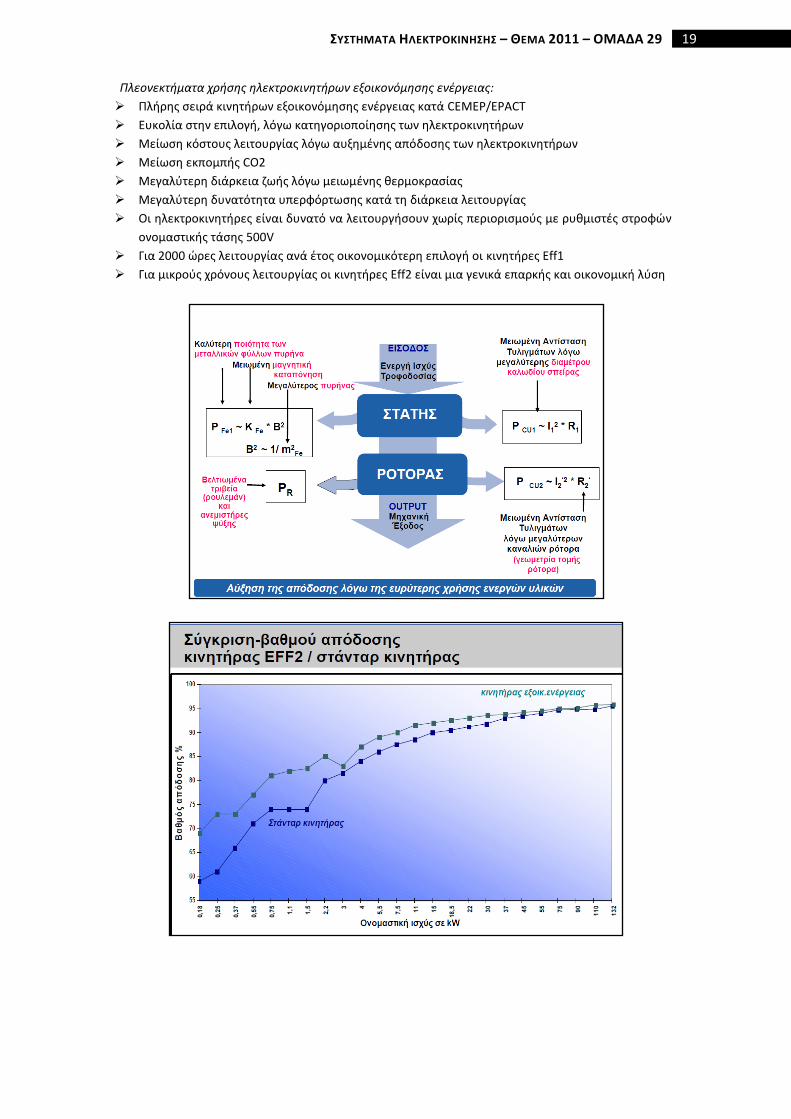
Πλεονεκτιματα χριςθσ θλεκτροκινθτιρων εξοικονόμθςθσ ενζργειασ:
Πλιρθσ ςειρά κινθτιρων εξοικονόμθςθσ ενζργειασ κατά CEMEP/EPACT
Ευκολία ςτθν επιλογι, λόγω κατθγοριοποίθςθσ των θλεκτροκινθτιρων
Μείωςθ κόςτουσ λειτουργίασ λόγω αυξθμζνθσ απόδοςθσ των θλεκτροκινθτιρων
Μείωςθ εκπομπισ CO2
Μεγαλφτερθ διάρκεια ηωισ λόγω μειωμζνθσ κερμοκραςίασ
Μεγαλφτερθ δυνατότθτα υπερφόρτωςθσ κατά τθ διάρκεια λειτουργίασ
Οι θλεκτροκινθτιρεσ είναι δυνατό να λειτουργιςουν χωρίσ περιοριςμοφσ με ρυκμιςτζσ ςτροφϊν
ονομαςτικισ τάςθσ 500V
Για 2000 ϊρεσ λειτουργίασ ανά ζτοσ οικονομικότερθ επιλογι οι κινθτιρεσ Eff1
Για μικροφσ χρόνουσ λειτουργίασ οι κινθτιρεσ Eff2 είναι μια γενικά επαρκισ και οικονομικι λφςθ