overview of autonomous vehicle related activities d.gibbins, october 2010
TRANSCRIPT

Sensor Signal Processing Group (EEE, Adelaide Uni)
Overview of autonomous vehicle related activities
D.Gibbins, October 2010

Sensor Signal Processing Group, EEE dept, Adelaide Uni, October 2010
SSP Group OverviewTeam of 4-5 researchers plus Phd Students (Research Leader: Prof.
D.A.Gray)
Specialising in Signal (& Information) Processing Radar (L-band, SAR, ISAR , phased-array, MIMO) Electro-optical, LIDAR/LADAR, Sonar sensors etc.. GPS/INS Target classification, recognition, 2D image and 3D scene analysis,
route planning etcFocus on applications related to Autonomous vehicles
GPS Anti-jam, jammer localisation (single/multiple UAV’s) Sensor fusion, path planning using PMHT, SLAM etc... Terrain & scene analysis Target recognition (2D & 3D) – apps in aerial surveillance
Radar sensors for autonomous vehicles (research interest) Detection/mapping/collision avoidance?

Sensor Signal Processing Group, EEE dept, Adelaide Uni, October 2010
Angular Separation of Sources (degrees)
Inte
rfer
ence
DO
A (
degr
ees)
Beampattern as Mobile Interference Approaches North Camp
10203040506070
0
20
40
60
80
100
120
140
160
180
Angular Separation of Sources (degrees)
Inte
rfer
ence
DO
A (
degr
ees)
Beampattern as Mobile Interference Approaches North Camp
10203040506070
0
50
100
150
Conventional and improved interference localisation
GPS Interference Mitigation &
Localisation for UAV applications Temporal, spatial and STAP
processing– Adaptive beam-forming– Null steering– DOA estimation
Successful anti-jam trials held in Woomera in presence of multiple interference sources
Ongoing development of compact anti-jam hardware for aerial platforms
Principle Researcher: Matthew Trinkle
-8000 -6000 -4000 -2000 0 2000 4000 6000
-2000
0
2000
4000
6000
8000
10000
12000
SouthE
ast
Measured Van Location
Unprotected Receiver Measurements
Protected Receiver
Measurements
Sensor Signal Processing Group, EEE dept, Adelaide Uni, October 2010
UAV surveillance & targetingElectro-optical Seeker Target
Recognition (DSTO sponsored)
Static land based & littoral moving targets etc
LADAR/LIDAR terrain reconstruction and classification (DSTO sponsored)
Stabilisation, reconstruction & scene analysis for apps such as route planning, situation awareness etc
LADAR/LIDAR 3D target recognition (DSTO &
self funded R&D)
ICP registration, SIFT matching, correlation based etc (high res and more recently low-resolution data)
Video based stabilisation/super-resolution/geo-location (DSTO sponsored)
Principle Researcher: Danny Gibbins
Sensor Signal Processing Group, EEE dept, Adelaide Uni, October 2010
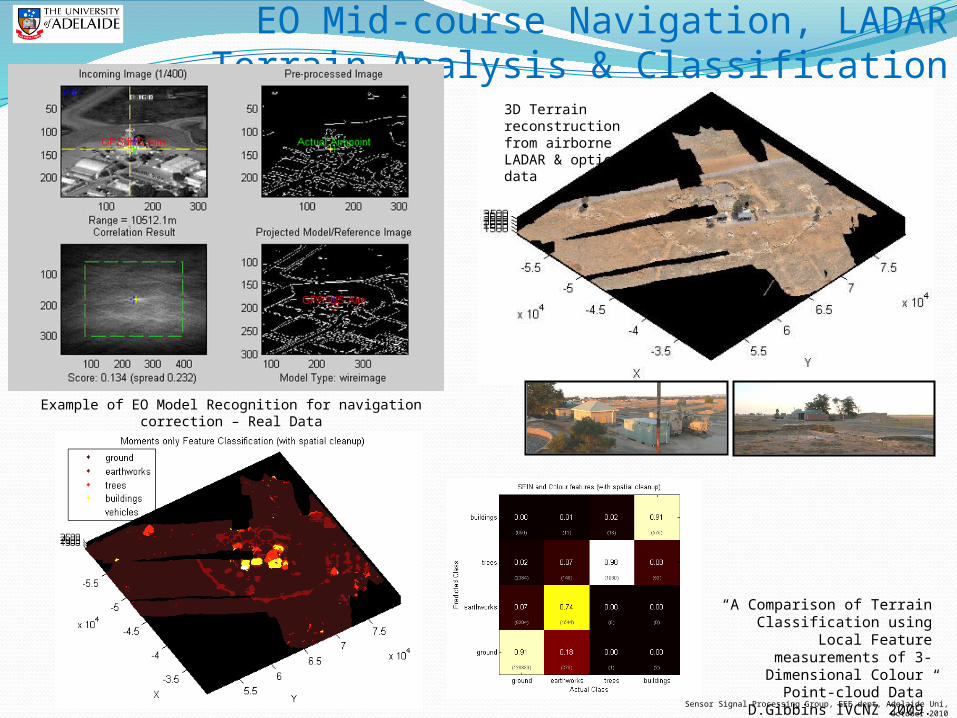
“A Comparison of Terrain Classification using Local Feature measurements of 3-Dimensional
Colour Point-cloud Data” D.Gibbins IVCNZ 2009.
EO Mid-course Navigation, LADAR Terrain Analysis & Classification
Example of EO Model Recognition for navigation correction – Real Data
3D Terrain reconstruction from airborne LADAR & optical data

Sensor Signal Processing Group, EEE dept, Adelaide Uni, October 2010
3D Sift feature analysis
3D Sift feature matching
3D LADAR/LIDAR Target Recognition (& registration)
“3D Target Recognition Using 3-Dimensional SIFT or Curvature Key-points and Local Spin
Descriptors” D.Gibbins DASP 2009.

Sensor Signal Processing Group, EEE dept, Adelaide Uni, October 2010
PMHT Path Planning for UGV’s (Cheung,Davey,Gray)
Probabilistic multi-hypothesis tracking for UGV path planningTreats locales of interest
as measurements and UGV platforms as targets
Attempts to optimise search across multiple UGV’s
z1 zn
k1;πk kn;πk
Waypoint to platform
assignments
Waypoints
Platform
States
x01 x1
1
τ1;πτ τt;πτWaypoint to
time assignments
x0m
xT1
xTm
z2
k2;πk
τ2;πτ
x1m
Example of path planning for 4 UGV’s based on random locations of interest