paper: curved type pneumatic artificial rubber muscle using shape-memory...
TRANSCRIPT

Takashima, K. et al.
Paper:
Curved Type Pneumatic Artificial Rubber MuscleUsing Shape-Memory Polymer
Kazuto Takashima∗1,∗2, Toshiro Noritsugu∗3, Jonathan Rossiter∗2,∗4,Shijie Guo∗5, and Toshiharu Mukai∗2
∗1Graduate School of Life Science and Systems Engineering, Kyushu Institute of Technology2-4 Hibikino, Wakamatsu-ku, Kitakyushu 808-0196, Japan
E-mail: [email protected]∗2Advanced Science Institute, RIKEN
2271-130 Anagahora, Shimoshidami, Moriyama-ku, Nagoya 463-0003, Japan∗3Graduate School of Natural Science and Technology, Okayama University
3-1-1 Tsushima-naka, Kita-ku, Okayama 700-8530, Japan∗4Department of Engineering Mathematics, University of Bristol, Bristol BS8 1TH, UK
∗5SR Laboratory, Tokai Rubber Industries, Ltd., 1 Higashi 3-chome, Komaki 485-8550, Japan[Received September 30, 2011; accepted April 17, 2012]
A novel pneumatic artificial muscle actuator is pre-sented which is based on the design of a conventionalcurved type pneumatic bellows actuator. By inhibit-ing the extension of one side with fiber reinforcement,bending motion can be induced when air is suppliedto the internal bladder. In this study, we developed anew actuator by replacing the fiber reinforcement witha Shape-Memory Polymer (SMP). The SMP can bedeformed above its glass transition temperature (TTT ggg)and maintains a rigid shape after it is cooled belowTTT ggg. When next heated above TTT ggg, it returns to its ini-tial shape. When only part of our actuator is warmedabove TTT ggg, only that portion of the SMP is soft and canactuate. Therefore, the direction of the motion can becontrolled by heating. Moreover, our actuator can bedeformed by an external force above TTT ggg and fixed bycooling it below TTT ggg.
Keywords: pneumatic rubber muscle, shape-memorypolymer, shape fixity, shape recovery, glass transitiontemperature
1. Introduction
In aging societies, several power-assist suits and power-assist apparatus have been proposed as wearable robotsfor caregivers and rehabilitation systems. In many ofthese applications, pneumatic actuators [1–5] are favoredover electric motors because of their light weight, flexi-bility, large output and back-drivability.
A linear type pneumatic rubber artificial muscle is com-posed of an internal bladder (e.g., rubber tube) coveredwith a bellows sleeve extending only in the axial direc-tion [1, 2]. When compressed air is introduced into thebladder, the actuator extends or contracts only axially. To
assist the rotational motion of a human joint with a lin-ear artificial muscle, a mechanism for securing a suffi-cient motion range and converting a generated force toa joint torque is required. Such a mechanism dimin-ishes the small-size and lightweight advantages of thedevice. Therefore, a conventional curved type artificialrubber muscle, which is reinforced with fibers, was pro-posed [2, 3]. By inhibiting the extension of one side usingfiber reinforcement, bending motion toward the reinforce-ment direction occurs when compressed air is supplied tothe bladder. However, once the fibers are fixed to the ac-tuator, it is difficult to change the bending position, thedirection, and the curvature of the actuator.
In this study, we propose a curved type artificial rub-ber muscle that can change the direction and curvature ofmotion by exploiting the properties of a Shape-MemoryPolymer (SMP) [6–13]. We demonstrate two types ofpneumatic SMP actuator and evaluate the versatility ofthe proposed actuator.
2. Shape-Memory Polymers
As shown in Fig. 1, SMPs are often described as two-phase structures comprising a lower-temperature “glassy”hard phase and a higher-temperature “rubbery” soft phase.The reversible change in the elastic modulus between theglassy and rubbery states of SMPs can be as high as500 times. SMPs can be deformed above their glass tran-sition temperature (Tg) by applying a small load. Theymaintain their shape after they have been cooled below Tgand are considered rigid in this state. When next heatedabove Tg, they return to the initial shape and hence exhibitshape recovery.
Compared with Shape-Memory Alloys (SMAs), SMPshave the following advantages [6]:
(1) light weight (1/10 of SMAs),
472 Journal of Robotics and Mechatronics Vol.24 No.3, 2012
Curved Type Pneumatic Artificial Rubber Muscle Using SMP
Tg
Glass transition region
Temperature
Ela
stic
mod
ulus
Glassy state Rubbery state
In many SMPs, the phase transition temperature is closeto room temperature.
Fig. 1. Relationship between the elastic modulus and thetemperature of the SMP. The actual values of Tg and elasticmodulus are shown in Section 4.1.
Tube
i)
Linear type rubber muscle
Cross sectionFiber bellows
SMP sheetRubber tube
The external fiber bellows can be impregnated with SMP
SMP coatingSMP sheet
ii)
Fig. 2. Structure of curved type artificial rubber muscle thatuses SMP.
(2) ease of creating complex 3D shapes,
(3) rigidity in the low-temperature range and flexibilityin the high-temperature range, and
(4) higher strains greater than 400% (7% maximum inSMAs).
With these features, SMPs are increasingly being in-vestigated for use in smart materials such as those foundin textiles, ergonomic utensils, spacecraft solar sails, mor-phing skins, intelligent medical devices, and implants forminimally invasive surgery [6–13]. Previously, we pro-posed a position-keeping module [7] and a McKibben ac-tuator [8] which use SMPs.
3. Concept of the Actuator
As shown in Fig. 2, the integration of SMPs into acurved type pneumatic actuator can be achieved as fol-lows:
i) Sandwiching a linear type rubber muscle betweentwo SMP sheets (Two sheets are not always neces-sary. One sheet, or more than two sheets, can beused, though the bending motion changes.).
T < Tg
P = PH
S4-1
S4-2
S4-3
T < Tg
P = PL
SMP sheet
T < Tg
P = PL
Initial state (S1)
Linear type rubber muscle
T < Tg
P = PH
Heating of both sides
Heating of upper side
T < Tg
Heating
Curved motion 2 (S2-3)
Curved motion 1 (S2-1)
Extension motion (S2-2)
Pressurized air
Pressurized air
Pressurized air
(Extension)
(Extension)
(Extension)
(Inhibition of extension)
(Inhibition of extension)
Cooling
Fixed shape in a rigid state (glassy state)
The fixed shape can be maintained without air supply.
Releasing of internal pressure
T > Tg
T > Tg
Heating of lower side
T > Tg
S3-1
S3-2
S3-3
CoolingT > Tg
P = PL
S5
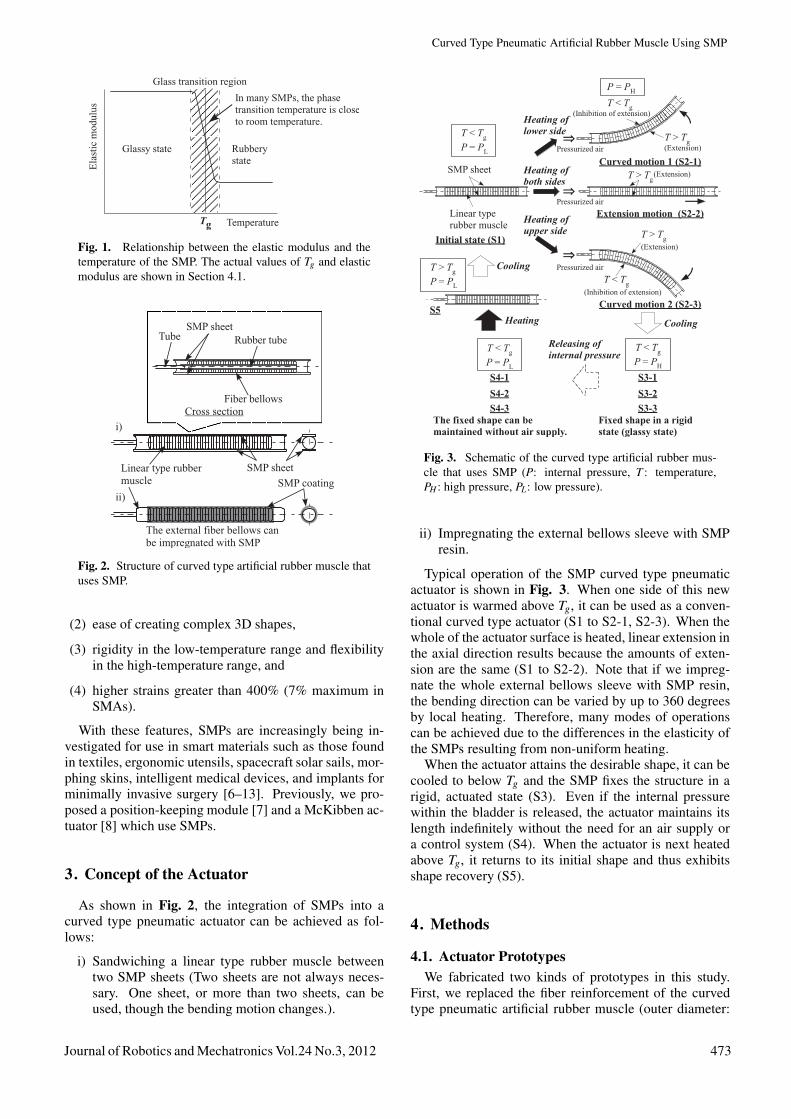
Fig. 3. Schematic of the curved type artificial rubber mus-cle that uses SMP (P: internal pressure, T : temperature,PH : high pressure, PL: low pressure).
ii) Impregnating the external bellows sleeve with SMPresin.
Typical operation of the SMP curved type pneumaticactuator is shown in Fig. 3. When one side of this newactuator is warmed above Tg, it can be used as a conven-tional curved type actuator (S1 to S2-1, S2-3). When thewhole of the actuator surface is heated, linear extension inthe axial direction results because the amounts of exten-sion are the same (S1 to S2-2). Note that if we impreg-nate the whole external bellows sleeve with SMP resin,the bending direction can be varied by up to 360 degreesby local heating. Therefore, many modes of operationscan be achieved due to the differences in the elasticity ofthe SMPs resulting from non-uniform heating.
When the actuator attains the desirable shape, it can becooled to below Tg and the SMP fixes the structure in arigid, actuated state (S3). Even if the internal pressurewithin the bladder is released, the actuator maintains itslength indefinitely without the need for an air supply ora control system (S4). When the actuator is next heatedabove Tg, it returns to its initial shape and thus exhibitsshape recovery (S5).
4. Methods
4.1. Actuator PrototypesWe fabricated two kinds of prototypes in this study.
First, we replaced the fiber reinforcement of the curvedtype pneumatic artificial rubber muscle (outer diameter:
Journal of Robotics and Mechatronics Vol.24 No.3, 2012 473

Takashima, K. et al.
SMP sheet
Linear type rubber muscle
(a) Prototype 1 (using polynorbornene sheet)
SMP coating
(b) Prototype 2 (coated with polyurethane)
Fig. 4. Prototypes of the newly developed actuator with SMP.
1.4 cm) with an SMP sheet (polynorbornene, 2 cm ×15 cm × 0.75 mm, Tg = 35◦C) as prototype 1 (length ofdrive part: 11 cm, total length: 15 cm, Fig. 4(a)). Poly-norbornene powder was pressed at 150◦C for 10 min intothe sheet. The SMP sheet was glued to one side of thelinear type pneumatic actuator.
Second, we coated the bellows sleeve of a lineartype pneumatic artificial rubber muscle (outer diameter:1.5 cm) with an SMP resin (polyurethane, Tg = 45◦C)as prototype 2 (length of drive part: 15 cm, total length:17 cm, Fig. 4(b)). In this study, we chose the polyurethaneDiary shape memory polymer (DiAPLEX Co., Ltd.). TheSMP was processed according to the sample preparationguide provided by DiAPLEX. Two liquid componentswere prepared. They were vacuum-dried for 1 h and thenmixed at the appropriate weight ratio. Subsequently, thebellows sleeve was brushed all over with the mixture andvacuum cured at 70◦C for 1 h. The white regions inFig. 4(b) show areas where small bubbles nucleated dur-ing curing of the SMP resin.
The main characteristics of these SMPs are summa-rized in Table 1 [9, 10]. Tg used in this study is closeto the body temperature. But, as Tg can be tailored withina wide range (−40◦C to 120◦C), the effect will be dimin-ished by changing the Tg even if this actuator is used in awearable robot.
4.2. Experimental MethodsFirst, when T < Tg, we checked whether prototype 1
could be operated similarly to a conventional curved typepneumatic artificial rubber muscle. We measured the tra-jectory of the tip and the generated force when com-pressed air was supplied.
As shown in Fig. 5, the actuator is initially alignedalong the y-axis and the root is fixed. If the curvatureof the bent sheet, R, is constant, expressed as follows.
R =Lθ
. . . . . . . . . . . . . . . . (1)
Table 1. Characteristics of SMP [9, 10].
Properties Prototype 1 Prototype 2Tg (◦C) 35 45Tensile strength (MPa) > 34 30Elastic modulus(T < Tg) (MPa)
955∗1 1350∗2
Elastic modulus(T > Tg) (MPa)
2.8∗1 4.5∗3
Elongation (%) > 200 300
∗1Tensile modulus∗2Bending modulus∗3100% tensile in the machine direction
(xs, ys) = (R(1-cos ), Rsin )
x
y
Sheet (Length: L)
Linear type rubber muscle
R
fixed
Fig. 5. Trajectory of the tip of the curved type artificialrubber muscle.
Prototype
Load cell
Force
Fig. 6. Force measurement equipment.
where θ is the central angle and the L is the length of thesheet. Therefore, the coordinate of the tip of the sheet(xs,ys) is expressed as follows.
(xs,ys) = (R(1− cosθ), Rsinθ)
=(
L(1− cosθ)θ
,Lsinθ
θ
). . . . (2)
We assumed that L is constant and compared the experi-mental results with that calculated using Eq. (2).
In order to measure blocked force, the actuator wasfixed in the straight shape by inhibiting the displacementof the actuator tip using a load cell (Fig. 6). For compar-ison, a conventional curved type artificial rubber musclethat was not coated with SMP was also evaluated (outerdiameter: 1.5 cm, length of drive part: 13 cm, total length:
474 Journal of Robotics and Mechatronics Vol.24 No.3, 2012

Curved Type Pneumatic Artificial Rubber Muscle Using SMP
16 cm). The fiber reinforcement of this actuator is fabric(2 cm × 17 cm × 1 mm).
Second, we verified the advantages of the new actuatordesign using prototypes 1 and 2. Compared with the con-ventional curved type pneumatic artificial rubber muscle,the new actuator with SMP properties has the followingadvantages:
1. If only part of the actuator is heated, only that portionof the SMP transitions to the rubbery state and hence,when the internal air pressure is increased, only thatportion of the structure can actuate. Therefore thebending position, the direction, the curvature and thenumber of curves along the length, can be changedby adjusting the heating area.
2. The initial shape, such as the curvature and the bend-ing position, can be changed.
3. The actuator can be fixed more rigidly than conven-tional pneumatic actuators by taking advantage ofthe phase change of the SMP material. A conven-tional pneumatic actuator can be considered to be a“gas spring,” and the shape fixity of the actuator islow. Moreover, even with active control, the abilityof the curved type pneumatic artificial rubber mus-cle to maintain a fixed state under varying externalforces is non-trivial because of its nonlinear charac-teristics and hysteresis.
4. According to the required stiffness of the object, theactuator can also change its own stiffness. For exam-ple, the heated soft actuator is suitable for manipula-tion of a soft delicate object.
5. The relationship between the bending angle and thegenerated torque can be changed by utilizing theshape fixity of the SMP. For example, this can beachieved by changing the initial bending angle andthe temperature when the actuator is operated.
In this study, we verified 1 and 2 above as the basic char-acteristics of the new actuator.
The experiments were performed in air at room tem-perature and relative humidity from 25% to 72%. By con-trolling the valve on the air supply manually, we suppliedand expelled compressed air to and from the pneumaticactuators. The prototypes were heated by using a hot-airgun. In future studies, we will investigate alternative heatsources, such as Joule heating, and utilize thermometersto enable feedback control of the proposed actuators.
5. Results and Discussions
5.1. Prototype 1The trajectory of the tip and the generated force when
the prototype 1 actuator is bent at T < Tg are shown inFigs. 7 and 8, respectively. In Fig. 7, the origin representsthe position where the actuators were fixed. In Fig. 7, thetrajectory of the tip calculated using Eq. (2) is also shown
Initial position
LL
Fig. 7. Trajectory of the tip of the prototype 1 actuator whenthe internal pressure is changed (T < Tg , P = 0→ 0.25 MPa).
(a) Relationship between the pressure and the generated force
(b) Motion of the conventional actuator
(c) Motion of the prototype actuator
Fig. 8. Generated force of the prototype 1 actuator (T < Tg).
as “theoretical” values (θ = 0.1 to 5.5 rad). As the con-ventional actuator used in this study was initially bent, theinitial generated force in Fig. 8 showed a constant offsetforce of approximately 0.5 N. Without heating, the newSMP actuator can be operated similarly to the conven-tional curved type pneumatic artificial rubber muscle asshown in Figs. 7 and 8. Since the experimental results
Journal of Robotics and Mechatronics Vol.24 No.3, 2012 475

Takashima, K. et al.
(a) Bending direction (Both samples are 30 mm long and 5 mm width.)
(b) Tensile direction (Both samples are 80 mm long and 5 mm width.)
Fig. 9. Mechanical properties of the SMP sheet and the fabric.
are similar to the theoretical values we can conclude thatstretching of the SMP at T < Tg is negligible.
As shown in Fig. 7, the maximum deformation of theSMP actuator was smaller than for the conventional ac-tuator. Also, in Fig. 8 the gradient of force responsewas slightly lower for the SMP actuator. The mechanicalproperties of the SMP sheet and the fabric are shown inFig. 9. When the SMP sheet and the fabric were deformedin the bending or tensile direction, the applied force wasmeasured. As shown in these figures, the deformation re-sistance of the SMP sheet was larger than that of the fabricin both directions. We conclude that a thinner SMP sheetwould be better. In Fig. 9(a), assuming a cantilever, thetheoretical values are calculated using the following equa-tion.
d =WL3
s
3EsIs. . . . . . . . . . . . . . (3)
where d is the displacement, W is the applied load, Ls,Es and Is are the length, Young’s modulus and the areamoment of inertia of the SMP sheet, respectively. As theexperimental results are similar to theoretical values, itwould be possible to estimate the necessary thickness ofthe SMP sheet.
Moreover, the fabric has an orthotropic property.Namely, the fabric is deformable in the lateral directionby a small load although the deformation resistance alongthe fiber axial direction is large [14]. This advantage wasdiminished in the proposed SMP actuator. In future stud-ies, it may be necessary to use a more complex SMP fabric
(a) T < Tg
(b) T > Tg
Fig. 10. Motion of the prototype 1 actuator when the in-ternal pressure is changed with or without heating (P = 0 →0.3 MPa).
T < Tg
LT > Tg
Fig. 11. Trajectory of the tip of the prototype 1 actuatorwhen the internal pressure is changed (P = 0 → 0.25 MPa).
instead of the simple uniform sheet used in this study.The motion of prototype 1 using the SMP sheet is
shown in Fig. 10 when 0.3 MPa compressed air is sup-plied at T < Tg and T > Tg. With heated (Fig. 10(b)),the bending displacement became larger than that of thecolder state (T < Tg) shown in Fig. 10(a), and similar toFig. 7. The trajectory of the tip of the prototype 1 actu-ator is shown in Fig. 11. The trajectories for both casesare similar although the maximum deformation becamelarger with heating. This shows how the lower bendingresistance of the heated SMP is much lower than for non-heated SMP.
In this study, we attached the SMP sheet to only oneside of the pneumatic actuator. By attaching the SMP toboth sides, the actuator would preferentially extend axi-ally.
Creep and stress relaxation are large in the SMP. There-fore, the initial position may change under load or aftercycling. However, this nonlinear deformation property isnot a disadvantage from the viewpoint of its shape fixity
476 Journal of Robotics and Mechatronics Vol.24 No.3, 2012

Curved Type Pneumatic Artificial Rubber Muscle Using SMP
(a) Straight
(b) 1 bending point
(c) 2 bending points
Fig. 12. Motion of the custom-fit prototype 1 actuator whenthe internal pressure is changed from a different initial posi-tion (T < Tg, P = 0 → 0.3 MPa).
because the actuator can be fixed at an arbitrary positionby cooling.
Utilizing the shape fixity of the SMP, we can change theinitial position of the actuator, as shown in Fig. 12. Beforeeach of these experiments, the actuator was deformed byan external force above Tg and fixed into a different initialshape. By utilizing the shape fixity and the shape recov-erability of the SMP, the new actuator with the SMP canbe applied, for example, to power-assist suits that can befitted to the user, in a similar way to a SMP spoon or forkhandle being custom-fit for a physically disabled person.The proposed actuator can be customized for each personat high temperature and then the shape is fixed at low tem-perature. In this application, it is not necessary to add alarge dedicated heat source because, once the rest shapehas been fixed, the actuator is driven by pneumatic poweronly. Consequently, this method can exploit the advan-tages of pneumatic rubber artificial muscles in personal-ized applications. It should be noted however that the ini-tial position may change due to stress or strain relaxationin the SMP.
In this section, we used prototype 1. But, simi-lar properties and motions to those presented above canbe achieved where the bellows sleeve is coated withpolyurethane SMP. The photograph and the bending mo-tion of the prototype are shown in Fig. 13. The charac-teristics of the wholly coated sample are shown in the fol-lowing section.
5.2. Prototype 2We evaluate whether the bending direction could be
changed by adjusting the heating area of the prototype 2
SMP coating
Linear type rubber muscle
(a) Photograph
Coated side
(b) Motion (T < Tg)
Fig. 13. Prototype of the newly developed actuator whoseone side is coated with SMP and its bending motion (T <Tg).
(b) Heating 1 (P = 0 MPa)(a) Initial state (P = 0 MPa)
(c) Actuation 1 (P = 0.3 MPa) (d) Heating 2 (P = 0 MPa)
(e) Actuation 2 (P = 0.3 MPa) (f) Heating 3 (P = 0 MPa)
(g) Actuation 3 (P = 0.3 MPa)
Valve
Prototype
Heating
Movement Heating
Heating
Movement
Movement
Fig. 14. Motion of the prototype 2 actuator when the inter-nal pressure is changed with heating and cooling.
SMP-coated actuator. The motion of prototype 2 is shownin Fig. 14. After heating and softening one part, we sup-plied 0.3 MPa compressed air. As shown, by changing theheating area, the bending direction can be changed.
Even if the SMP is heated and becomes soft, the defor-mation resistance of the SMP is still significant. There-
Journal of Robotics and Mechatronics Vol.24 No.3, 2012 477

Takashima, K. et al.
Fig. 15. Close-up view of the prototype 2.
fore, the displacement of the actuator was smaller thanfor prototype 1, although the bending direction could bearbitrarily changed. In our previous study using a McK-ibben actuator [8], the SMP coating was generally thickerthan desired. Similarly the actuator presented here suf-fers from the same problem, as shown in Fig. 15. There-fore, both prototype 2 and the McKibben actuators showsmaller displacements in the isotonic experiments. More-over, if the SMP is thick, the heating time becomes longand it would be difficult to apply feedback control. Infuture studies, finer control of the coating thickness,in-cluding the accurate measurement of the coating thick-ness, will be necessary. For example, as it is difficult tocontrol the coating thickness by brushing the SMP, othermethods such as dip-coating may be more effective.
The specific gravity of the SMPs used in this study is1 [9, 10], which is 0.15 times larger than that of steel.This ratio (0.15) is smaller than that of Young’s modulus(glassy SMP to steel (210 GPa), i.e., 0.006). As a result,the weight necessary to hold the same load will be greaterwhen using the SMP. Therefore, it may be useful to usea composite SMP material. This naturally will leads tofuture work on further specifications and characterizationof the proposed actuator.
6. Conclusion
In this study, we propose a curved type artificial rub-ber muscle using an SMP. The enhanced versatility of thisnew actuator is shown through a series of experimentsconducted on two kinds of prototypes. The results areas follows.
• Without heating, the new actuator can be operatedsimilarly to the conventional curved type pneumaticartificial rubber muscle.
• Utilizing the shape fixity of the SMP, we can changethe initial position of the proposed actuator.
• By changing the heating area of the proposed actua-tor, the bending direction can be changed.
References:[1] D. Sasaki, T. Noritsugu, and M. Takaiwa, “Development of Pneu-
matic Soft Robot Hand for Human Friendly Robot,” J. of Roboticsand Mechatronics, Vol.15, No.2, pp. 164-171, 2003.
[2] D. Sasaki, T. Noritsugu, H. Yamamoto, and M. Takaiwa, “Devel-opment of Power Assist Glove using Pneumatic Artificial RubberMuscle,” J. of the Robotics Society of Japan, Vol.24, No.5, pp. 640-646, 2006.
[3] M. Aragane, T. Noritsugu, M. Takaiwa, D. Sasaki, and S. Naomoto,“Development of Sheet-like Curved Type Pneumatic Rubber Mus-cle and Application to Elbow Power Assist Wear,” J. of the RoboticsSociety of Japan, Vol.26, No.6, pp. 674-682, 2008.
[4] C. P. Chou and B. Hannaford, “Measurement and Modelling ofMcKibben Pneumatic Artificial Muscles,” IEEE Trans. on Roboticsand Automation, Vol.12, No.1, pp. 90-102, 1996.
[5] H. Kobayashi and K. Hiramatsu, “Development of Muscle Suit forUpper Limb,” Proc. of the IEEE Int. Conf. on Robotics and Au-tomation, Vol.3, pp. 2480-2485, 2004.
[6] Japan Institute of Invention and Innovation, “Patent DistributionSupport Chart: Shape-Memory Polymers,” National Center for In-dustrial Property Information and Training, 2006.
[7] K. Takashima, N. Zhang, T. Mukai, and S. Guo, “FundamentalStudy of a Position-keeping Module Using a Shape-memory Poly-mer,” J. of the Robotics Society of Japan, Vol.28, No.7, pp. 905-912,2010.
[8] K. Takashima, J. Rossiter, and T. Mukai, “McKibben ArtificialMuscle Using Shape-memory Polymer,” Sensors & Actuators: A.Physical, Vol.164, pp. 116-124, 2010.
[9] E. Yamamoto, “Norsorex,” Plastics, Vol.38, No.12, pp. 107-111,1987.
[10] K. Sakurai, A. Sayanagi, T. Naito, and T. Takahashi, “Shape-memorizable Polymer: Polynorbornene,” Bulletin of the Institutefor Material Science and Engineering, Faculty of Engineering,Fukui University, Vol.26, pp. 23-33, 1988.
[11] M. Irie, “Development of Shape-memory Polymers,” CMC Publish-ing, 2000.
[12] H. Tobushi, K. Tanaka, H. Horikawa, and M. Matsumoto, “ShapeMemory Materials and their Applications,” Corona Publishing,2004.
[13] Z. Yu, W. Yuan, P. Brochu, B. Chen, Z. Liu, and Q. Pei, “Large-strain, Rigid-to-rigid Deformation of Bistable Electroactive Poly-mers,” Applied Physics Letters, Vol.95, 192904, 2009.
[14] M. Inoue, “Research on the Mechanics of Fibrous Materials,” Sen’igakkaishi, Vol.64, No.8, pp. 246-251, 2008.
Name:Kazuto Takashima
Affiliation:Associate Professor, Graduate School of LifeScience and Systems Engineering, Kyushu Insti-tute of Technology
Address:2-4 Hibikino, Wakamatsu-ku, Kitakyushu 808-0196, JapanBrief Biographical History:1999-2003 Matsushita Electric Industrial Co., Ltd.2005-2006 Research Fellow (DC2) of the Japan Society for the Promotionof Science, Kyoto University2006-2010 Research Scientist, RIKEN (2010- Adjunct Research Scientist)2010- Associate Professor, Kyushu Institute of TechnologyMain Works:• “Development of Computer-Based Simulator for Catheter Navigation inBlood Vessels,” Trans. of the Japan Society of Mechanical Engineers,Series C, Vol.73, No.735, pp. 2988-2995, 2007.• “Piezoelectric Properties of Vinylidene Fluoride Oligomer for Use inMedical Tactile Sensor Applications,” Sensors & Actuators: A. PhysicalVol.144, pp. 90-96, 2008.• “McKibben Artificial Muscle Using Shape-memory Polymer,” Sensorsand Actuators A: Physical, Vol.164, pp. 116-124, 2010.Membership in Academic Societies:• The Japan Society of Mechanical Engineers (JSME)• Japanese Society for Clinical Biomechanics• Japanese Society for Medical and Biological Engineering (JSMBE)• The Robotic Society of Japan (RSJ)• The Institute of Electrical and Electronics Engineers (IEEE)
478 Journal of Robotics and Mechatronics Vol.24 No.3, 2012

Curved Type Pneumatic Artificial Rubber Muscle Using SMP
Name:Toshiro Noritsugu
Affiliation:Professor, Department of Intelligent MechanicalSystems, The Graduate School of Natural Sci-ence and Technology, Okayama University
Address:3-1-1 Tsushimanaka, Kita-ku, Okayama 700-8530, JapanBrief Biographical History:1974- Joined Tsuyama National College of Technology1986- Associate Professor, Faculty of Engineering, Okayama University1991- Professor, Faculty of Engineering, Okayama University2005- Graduate School of Natural Science of Technology, OkayamaUniversityMain Works:• “Development of Power Assist Wear Using Pneumatic Rubber ArtificialMuscles,” J. of Robotics and Mechatronics, Vol.21, No.5, pp. 607-613,2009.• “Wearable Power Assist Device for Standing Up Motion UsingPneumatic Rubber Artificial Muscles,” J. of Robotics and Mechatronics,Vol.19, No.6, pp. 619-628, 2007.Membership in Academic Societies:• The Japan Society of Mechanical Engineers (JSME)• The Society of Biomechanicsms (SOBIM)• The Robotic Society of Japan (RSJ)• The Institute of System, Control and Information Engineers (ISCIE)• The Japan Fluid Power Society (JFPS)• The Society of Instrument and Control Engineers (SICE)
Name:Jonathan Rossiter
Affiliation:Senior Lecturer, Department of EngineeringMathematics, University of Bristol
Address:University Walk, Bristol BS8 1TR, UKBrief Biographical History:2002-2004 Lecturer, Engineering Mathematics, University of Bristol2004-2008 Royal Society and JSPS Research Fellow, RIKEN2008- Senior Lecturer, Head of Soft Robotics, University of BristolMain Works:• A. T. Conn and J. M. Rossiter, “Towards holonomic electro-elastomeractuators with six degrees of freedom,” Smart Materials and Structures,Vol.21, pp. 035012-035020, 2012.• O. A. Araromi, A. T. Conn, C. S. Ling, J. M. Rossiter, R. Vaidyanathan,and S. C. Burgess, “Spray Deposited Multilayered Dielectric ElastomerActuators,” Sensors and Actuators A: Physical, Vol.167, pp. 459-467,2011.• K. Takashima, J. M. Rossiter, and T. Mukai, “McKibben artificial muscleusing shape-memory polymer,” Sensors and Actuators A: Physical,Vol.164, pp. 116-124, 2010.
Name:Shijie Guo
Affiliation:Senior Research Engineer, Tokai Rubber Indus-tries, Ltd.Team Leader of Robot Implementation ResearchTeam, RIKEN-TRI Collaboration Center forHuman-Interactive Robot Research, RIKEN
Address:1 Higashi 3-chome, Komaki, Aichi 485-8550, JapanBrief Biographical History:1992- Ebara Research2005- Tokai Rubber Industries, Ltd.Main Works:• “Development of a Dynamic Damper Using Fluids and Rubber,” J. ofEnvironment and Engineering, Vol.6, No.1, pp. 199-209, 2011.• “Realization and Safety Measures of Patient Transfer by Nursing-CareAssistant Robot RIBA with Tactile Sensors,” J. of Robotics andMechatronics, Vol.23, No.3, pp. 360-369, 2011.Membership in Academic Societies:• The Japan Society of Mechanical Engineers (JSME)
Name:Toshiharu Mukai
Affiliation:Team Leader, Robot Sensor Systems ResearchTeam, RIKEN RTC
Address:2271-130 Anagahora, Shimoshidami, Moriyama-ku, Nagoya 463-0003,JapanBrief Biographical History:1995- Frontier Research Scientist, RIKEN2000- Postdoctoral Fellow, Laboratoire de Neurobiologie, CNRS2001- Laboratory Head, Biologically Integrative Sensors Laboratory,RIKEN2007- Team Leader, Robot Sensor Systems Research Team, RIKENMain Works:• “Development of the Tactile Sensor System of a Human-InteractiveRobot ‘RI-MAN’,” IEEE Trans. on Robotics, Vol.24, No.2, pp. 505-512,Apr. 2008.• “1 ms Soft Areal Tactile giving Robots Soft Response,” J. of Roboticsand Mechatronics, Vol.20, No.3, pp. 473-480, Jun. 2008.Membership in Academic Societies:• The Japan Society of Mechanical Engineers (JSME)• The Robotics Society of Japan (RSJ)• The Institute of Electrical and Electronics Engineers (IEEE)
Journal of Robotics and Mechatronics Vol.24 No.3, 2012 479