parul university- faculty of engineering...
TRANSCRIPT

PARUL UNIVERSITY- FACULTY OF ENGINEERING &TECHNOLOGY
DEPARTMENT OF ELECTRICAL ENGINEERINGM.TECH. – ELECTRICAL ENGINEERING
SYLLABUS FOR 2ND SEMPOWER SYSTEM PROTECTION (03203151)
ACADEMIC YEAR 2015-16
Type of Course: Electrical Engineering
Prerequisite: Knowledge of Power System Protection UG level.
Rationale: This course provides detailed concepts of static & digital relays. This course also providesrelay coordination of over current relay & also discuss about new concept in power system protection.The design of protection scheme for power system will also be covered.
Teaching and Examination Scheme:Teaching Scheme
(Hrs/Week)Credit
Examination Scheme
TotalL T P External Internal
Theory Practical Theory *C.E. Practical2 0 2 3 60 30 20 20 20 150
L- Lectures; T- Tutorial; P- Practical; C.E. -Continuous Evaluation
Contents:Sr.No.
Topic Weightage TeachingHrs.
1.
Basic Elements of Digital Protection:Basic Components of a Digital Relay, Signal ConditioningSubsystems, Transducers, Surge Protection Circuits, AnalogueFiltering, Analogue Multiplexers, Conversion Subsystem, TheSampling Theorem, Signal Aliasing Error, Sample and Hold Circuit,Digital Multiplexing ,Digital-to-Analogue Conversion, Analogue-to-Digital Conversion, Digital Relay Subsystem, Benefits of digitalrelays.
19% 9
2.
Coordination of Over-current Relays For Cascaded ParallelFeeder:Protection of an interconnected system, Link net structure,Flowchart of Primary/Backup relay pairs, Flowchart of TimeMultiplier Setting. Examples based on existing power systemnetwork
13% 6
3.
Reclosing and Synchronizing:Introduction, Reclosing Precautions, Reclosing SystemConsiderations, Considerations for Applications of InstantaneousReclosing, Reclosing Relays and Their Operation, SynchronismCheck, Dead-Line or Dead-Bus Reclosing, Automatic Synchronizing
13% 6
4.Transformer Protection:Introduction, Magnetizing Inrush, Differential Relaying forTransformer Protection, Sample Checks for Applying Transformer
19% 7

Sr.No.
Topic Weightage TeachingHrs.
Differential Relays, Typical Application of Transformer Protection,Typical Protective Schemes for Industrial and Commercial PowerTransformers.
5.
Transmission line relaying:Introduction, The Degree of compensation, Voltage Profile of SeriesCompensated Line, Faults with Unbypassed Series Capacitors,Relay Problems Due to compensation, Voltage and CurrentInversion, Problems in reach measurement, Protection of Seriescompensated line.
8% 4
Text Books:
1. Protection and Switchgear by Bhavesh Bhalja, R. P. Maheshwari and N. G. Chothani, OxfordUniversity Press, New Delhi, India, 2011.
Reference Books:
1. Protecting Relaying by Marcel Dekker Inc; New York, 1998- J. L. Blackburn.2. Power System Relaying by John Wiley & Sons, New York, 1996- S. H. Horowitz and A. G.
Phadke.3. Protective Relaying Theory and Applications by Walter A. Elmore, Marcel Dekker Inc; New York.
Course Outcome:After learning the course the students shall be able to:
1. Estimate the current and voltage magnitudes from the sampled measurements.2. Realize the various dynamic characteristics of digital relays for protection of transmission lines,
transformers.3. Identify the new developments in protective relaying and applications.
List of Practical:Based on Syllabus students shall perform following Practical.
1. To Study About Numerical Relay.2. To Perform The Parallel Feeder Protection.3. To Perform The Radial Feeder Protection.4. To Perform Numerical Protection Of Induction Motor.5. To Perform Numerical Protection Of Transformer.6. To Perform Numerical Protection Of Generator.7. To Perform Numerical Protection Of Distance.8. To Study About Linknet Structure In MATLAB.9. Relay Co-Ordination Using Mi-Power Software.
10. To Perform Simulation Of Series Compensated Transmission Line Protection.
Major Software:
1. MAT Lab Simulink Software2. PSCAD
PARUL UNIVERSITY-FACULTY OF ENGINEERING &TECHNOLOGY
DEPARTMENT OF ELECTRICAL ENGINEERINGM.TECH. – ELECTRICAL ENGINEERING
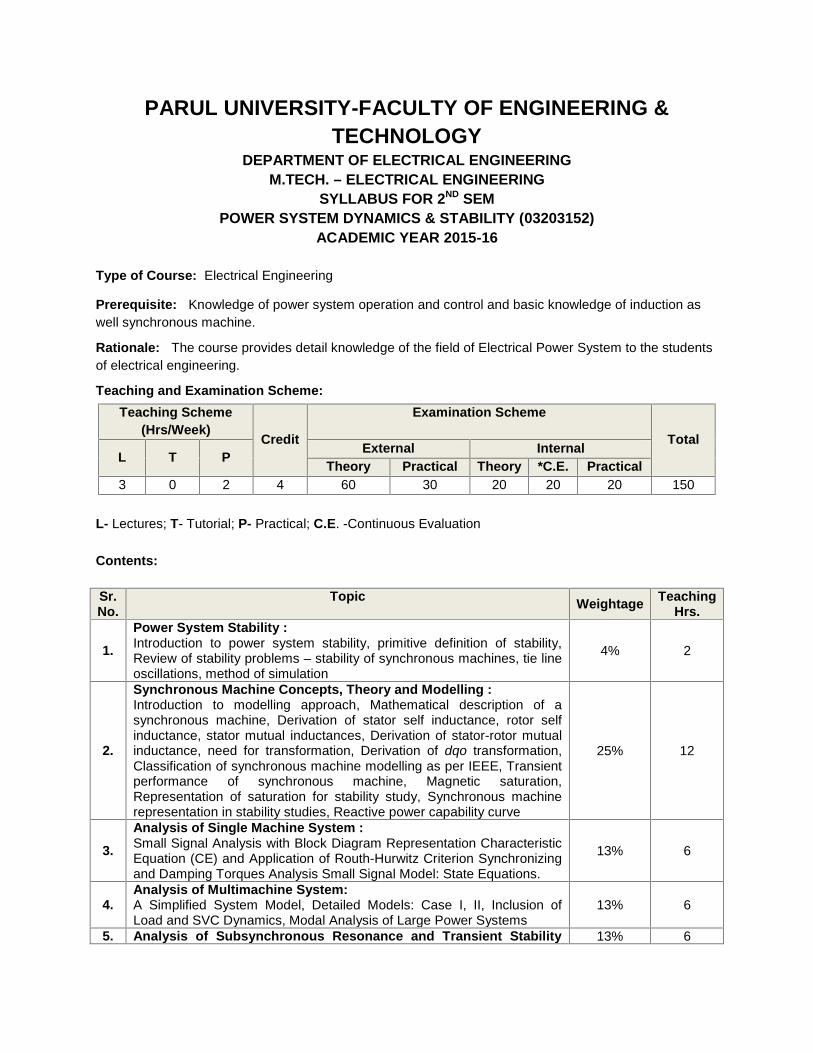
SYLLABUS FOR 2ND SEMPOWER SYSTEM DYNAMICS & STABILITY (03203152)
ACADEMIC YEAR 2015-16
Type of Course: Electrical Engineering
Prerequisite: Knowledge of power system operation and control and basic knowledge of induction aswell synchronous machine.
Rationale: The course provides detail knowledge of the field of Electrical Power System to the studentsof electrical engineering.
Teaching and Examination Scheme:Teaching Scheme
(Hrs/Week)Credit
Examination Scheme
TotalL T P External Internal
Theory Practical Theory *C.E. Practical3 0 2 4 60 30 20 20 20 150
L- Lectures; T- Tutorial; P- Practical; C.E. -Continuous Evaluation
Contents:
Sr.No.
Topic Weightage TeachingHrs.
1.Power System Stability :Introduction to power system stability, primitive definition of stability,Review of stability problems – stability of synchronous machines, tie lineoscillations, method of simulation
4% 2
2.
Synchronous Machine Concepts, Theory and Modelling :Introduction to modelling approach, Mathematical description of asynchronous machine, Derivation of stator self inductance, rotor selfinductance, stator mutual inductances, Derivation of stator-rotor mutualinductance, need for transformation, Derivation of dqo transformation,Classification of synchronous machine modelling as per IEEE, Transientperformance of synchronous machine, Magnetic saturation,Representation of saturation for stability study, Synchronous machinerepresentation in stability studies, Reactive power capability curve
25% 12
3.Analysis of Single Machine System :Small Signal Analysis with Block Diagram Representation CharacteristicEquation (CE) and Application of Routh-Hurwitz Criterion Synchronizingand Damping Torques Analysis Small Signal Model: State Equations.
13% 6
4.Analysis of Multimachine System:A Simplified System Model, Detailed Models: Case I, II, Inclusion ofLoad and SVC Dynamics, Modal Analysis of Large Power Systems
13% 6
5. Analysis of Subsynchronous Resonance and Transient Stability 13% 6

Sr.No.
Topic Weightage TeachingHrs.
Controllers :SSR in Series Compensated Systems, Modelling and analysis ofMechanical System, Computation of Ye(s) : Simplified and DetailedMachine Model, Analysis of Tensional Interaction - A PhysicalReasoning, State Space Equations and Eigen value Analysis,Simulation of SSR, System resign for Transient Stability, DiscreteSupplementary Controls, Dynamic Braking, Discrete control of ExcitationSystems, Series Capacitor Insertion, Emergency Control Measures
6.
Voltage Stability :Introduction to voltage stability, voltage collapse according toIEEE/CIGRE, classification, voltage collapse incidents, Factors affectingvoltage instability and collapse Comparison of Angle and VoltageStability, Analysis of SMLB System, Dynamics of Load RestorationAnalysis of Voltage Instability and Collapse, Derivation of critical voltageand critical power, P-V curves and Q-V curves, Integrated Analysis ofVoltage and Angle Stability Overview on various types of bifurcations,saddle node bifurcation, Hopf bifurcation Continuation Power Flow(CPF), formulation of power flow equations, predictor correctorprocesses Sensitivity analysis for voltage stability, eigen-value sensitivity
33% 16
*Continuous Evaluation:It consists of assignments/Seminars/Presentations/Quizzes/Surprise Tests (Summative/MCQ) etc.
Text Books:
1. Power System Stability and Control, by P. S. Kundur McGraw Hill Inc, New York2. Power System Dynamics, Stability and Control by K.R.Padiyar Interline Publishers, Bangalore
Reference Books:
1. Power System Dynamics and Stability, Prentice Hall- P.Sauer and M.A.Pai2. Power system control and stability by P.M. Anderson and A.A. Fouad.3. Power System Dynamics, Stability and Control by J. Machowski, J.W. Bialek, J.R. Bumby Wiley
publishers.4. Computational Techniques for Voltage Stability Assessment and Control, Springer by V. Ajjarapu
Course Outcomes:After successful completion of the course, student will be able to
1. model various system components, apparatus mathematically2. analyze effects of changes in any of these model parameter3. express the system dynamics, mathematically prove it, simulate and suggest corrective actions4. apply and adapt the applications of mathematics and engineering tools in the analysis of
instability problems5. modeling the dynamic behaviors of system components under small and large disturbances
List of Practical:Based on Syllabus students shall perform following Practical.
1. Simulation of synchronous machine2. Simulation of SMIB system with different generator models in steady state.

3. Simulation of SMIB system with and without AVR (with different generator models).4. Eigen-analysis of SMIB with different generator models.5. Eigen value analysis of SMIB system to verify eigen analysis for small disturbances.6. Simulation of SMIB system for different large disturbances and different generator models.7. Simulation of multi machine system and verification of eigen analysis for small disturbances.8. Simulation of torque-angle loop for SMIB.9. To study load flow analysis, short circuit analysis and transient stability analysis for four machine
system using Mi-Power software.10. Performance of three PSS for Inter-area oscillation.
Major and Minor Equipments/Softwares:
1. Matlab2. Mi-Power/ETAP3. PSAT toolbox4. PSCAD

PARUL UNIVERSITY-FACULTY OF ENGINEERING &TECHNOLOGY
DEPARTMENT OF ELECTRICAL ENGINEERINGM.TECH – ELECTRICAL ENGINEERING
SYLLABUS FOR 2ND SEMOPTIMIZATION TECHNIQUES (03203153)
ACADEMIC YEAR 2015-16
Type of Course: Optimization TechniquesPrerequisite: Knowledge of Engineering Mathematics up to Undergraduate level.Rationale: The subject enables the students to gain in-depth knowledge of the various optimizationtechniques applied in the engineering fields.Teaching and Examination Scheme:
Teaching Scheme(Hrs/Week)
Credit
Examination Scheme
TotalL T P
External InternalTheory Practical Theory *C.E. Practical
2 0 0 2 60 - 20 20 - 100
L- Lectures; T- Tutorial; P- Practical; C.E. -Continuous Evaluation
Contents:Sr.No.
Topic Weightage TeachingHrs.
1.
Linear programming:Statement and classification of optimization problems overview ofoptimization techniques standard form of linear programming problems- Definitions and theorems - Simplex & Revised simplex method -Duality & Dual simplex method
22% 7
2.
Unconstrained dimensional optimization techniques:Necessary and sufficient conditions - Search methods (unrestrictedFibonacci and golden) – Interpolation methods (Quadratic, Cubic anddirect root method) - Direct search methods - Random search -Descent methods
25% 8
3.
Constrained optimization techniques & dynamic programming:Necessary and sufficient conditions - Equality and inequality constraints- Kuhn-Tacker conditions –Gradient projection method - Cutting planemethod - Penalty function method (Interior and exterior) - Principle ofoptimality
31% 10
4.Recent developments in optimization techniques:Tabu search-Simulated Annealing - Ant colony Optimization - BeesAlgorithm- Cuckoo search (CS)- Artificial immune algorithm (AIA)-Harmony Search (HS)
22% 7
Text Books:
1. Optimization: Theory and Application by S.S. Rao, Wiley Eastern Press,19782. Genetic Algorithm in Search, Optimization, and Machine Learning by D.E. Goldberg, MA: Addison-

Wesly, 1989.
Reference Books:
1. Optimization Theory with Applications by D.A. Pierre, John Wiley & Sons, 1969.2. Optimization method for Engineering Design by R.L. Fox, Addition Welsey, 1971.3. Linear Programming by G. Hadely, Addition Wesley, 1962.4. A Modified Particle Swarm Optimizer”, Shi, Y. Eberhart, R.C Proceedings of the IEEE
International conference on Evolutionary Computation, Anchorage, AK, pp. 69-73, May 1998.
Course Outcome:After learning the course the students shall be able to:
1. Introduce the different optimization problems and techniques2. Understand the fundamentals of the unconstrained dimensional optimization techniques.3. Understand the concept of constrained optimization techniques & dynamic programming4. Introduce the advanced optimization techniques which are related to practical world based
problem.

PARUL UNIVERSITY-FACULTY OF ENGINEERING &TECHNOLOGY
DEPARTMENT OF ELECTRICAL ENGINEERINGM.TECH. – ELECTRICAL ENGINEERING
SYLLABUS FOR 2ND SEMELECTRICAL POWER QUALITY (03203154)
ACADEMIC YEAR 2015-16
Type of Course: Electrical Engineering (M.E.)
Prerequisite: Knowledge of Power Quality Problems like Voltage Sag, Voltage Swell, Transient,Harmonics etc, Source of Harmonics, Effect of Harmonics and Different Techniques to EliminateHarmonics.
Rationale: This course provides ideas related to Power Quality Problems and Harmonic Filters to thestudents of electrical engineering.
Teaching and Examination Scheme:Teaching Scheme
(Hrs/Week)Credit
Examination Scheme
TotalL T P External Internal
Theory Practical Theory *C.E. Practical2 0 0 2 60 0 20 20 0 100
L- Lectures; T- Tutorial; P- Practical; C.E. -Continuous Evaluation
Contents:
Sr.No.
Topic Weightage TeachingHrs.
1.Introduction to Power Quality AnalysisReview of Industrial Power Systems Concepts, Power QualityDefinitions and Indices, Equipment Ratings, Effects of Disturbanceson Equipment and Processes
10% 05
2.Voltage DisturbancesLightning (transients), System Switching, System Faults, Sags,Swells , Unbalance
10% 05
3.
Measurement and Analysis MethodsVoltage, Current, Power and Energy Measurement, Power factormeasurements and definitions, Event recorder, Measurement Error-Analysis: Analysis in the periodic steady state,Time domainmethods, Frequency domain methods: Laplace’s, Fourier, andHartley transform-Walsh Transform- Wavelet Transform
17% 08
4.
HarmonicsSources of Harmonics, Symptoms and Effect on Equipment, PowerFactor Capacitors and Resonance, Harmonic Limitations (IEEEStandard 519), Series Resonance and Filter Design, Third HarmonicNeutral Current
19% 09
5. Calculation of Harmonic Voltages and CurrentsSystem Harmonic Models, The Current Injection Method, Frequency 8% 04

Sr.No.
Topic Weightage TeachingHrs.
Response Modeling
6
Power Quality EnhancementUtility-Customer interface , Harmonic filters: passive, Active andhybrid filters, Custom power devices: Network reconfiguringDevices, Load compensation using DSTATCOM, Voltage regulationusing DSTATCOM, protecting sensitive loads using DVR, UPQC,control strategies: P-Q theory, Synchronous detection method,Custom power park –Status of application of custom power devices.
25% 12
7GroundingTypes of Grounding, Arcing Ground Faults, Symptoms of IneffectiveGrounding, Electronics and Computer Grounding
10% 05
Reference Books:
1. Power Quality By C. Sankaran CRC Press.2. Instantaneous Power Quality and Signal Conditioning by H. Akagi IEEEPress3. Harmonics and Power System by R. C. Dugan
Course Outcome:After learning the course the students shall be able to:
1. Recognize importance of Power Quality and its day to day applications.2. Understand the role of Harmonics and their behavior.3. Understand different types of Harmonic Filters and its Comparison.4. Develop simulation of different active filter and analyze the performance.
PARUL UNIVERSITY-FACULTY OF ENGINEERING &TECHNOLOGY
DEPARTMENT OF ELECTRICAL ENGINEERINGM.TECH. – ELECTRICAL ENGINEERING
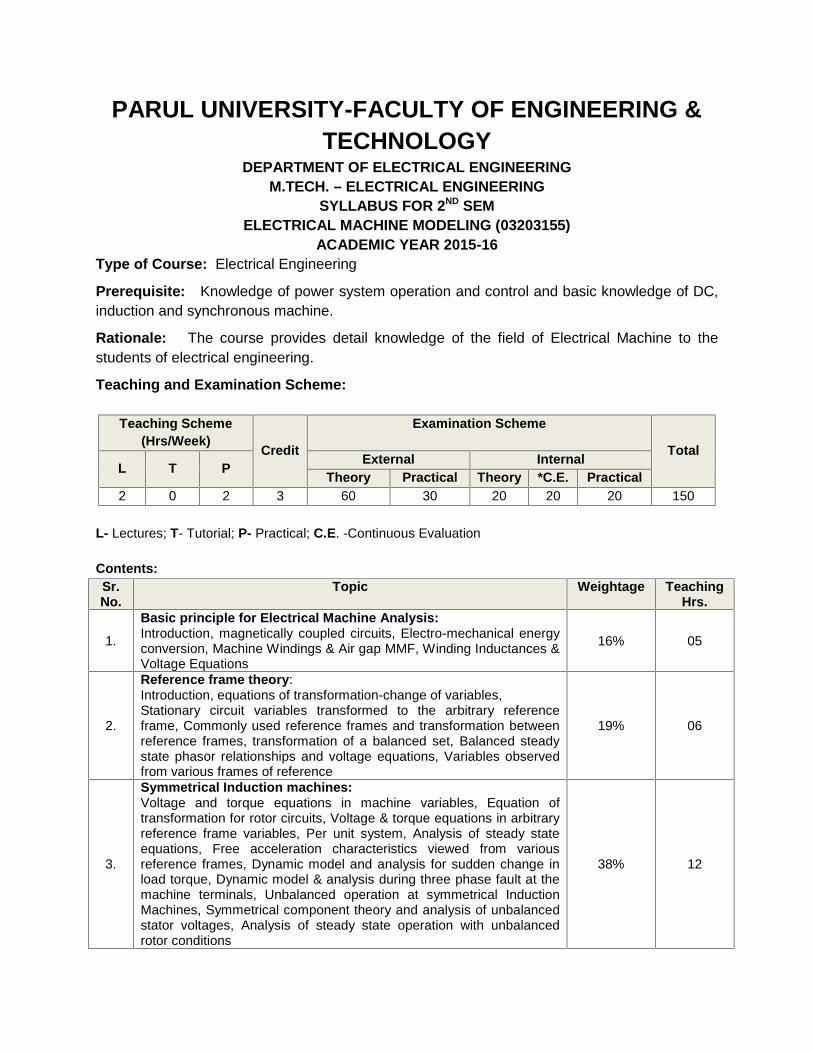
SYLLABUS FOR 2ND SEMELECTRICAL MACHINE MODELING (03203155)
ACADEMIC YEAR 2015-16Type of Course: Electrical Engineering
Prerequisite: Knowledge of power system operation and control and basic knowledge of DC,induction and synchronous machine.
Rationale: The course provides detail knowledge of the field of Electrical Machine to thestudents of electrical engineering.
Teaching and Examination Scheme:
Teaching Scheme(Hrs/Week)
Credit
Examination Scheme
TotalL T P External Internal
Theory Practical Theory *C.E. Practical2 0 2 3 60 30 20 20 20 150
L- Lectures; T- Tutorial; P- Practical; C.E. -Continuous Evaluation
Contents:Sr.No.
Topic Weightage TeachingHrs.
1.
Basic principle for Electrical Machine Analysis:Introduction, magnetically coupled circuits, Electro-mechanical energyconversion, Machine Windings & Air gap MMF, Winding Inductances &Voltage Equations
16% 05
2.
Reference frame theory:Introduction, equations of transformation-change of variables,Stationary circuit variables transformed to the arbitrary referenceframe, Commonly used reference frames and transformation betweenreference frames, transformation of a balanced set, Balanced steadystate phasor relationships and voltage equations, Variables observedfrom various frames of reference
19% 06
3.
Symmetrical Induction machines:Voltage and torque equations in machine variables, Equation oftransformation for rotor circuits, Voltage & torque equations in arbitraryreference frame variables, Per unit system, Analysis of steady stateequations, Free acceleration characteristics viewed from variousreference frames, Dynamic model and analysis for sudden change inload torque, Dynamic model & analysis during three phase fault at themachine terminals, Unbalanced operation at symmetrical InductionMachines, Symmetrical component theory and analysis of unbalancedstator voltages, Analysis of steady state operation with unbalancedrotor conditions
38% 12
4.
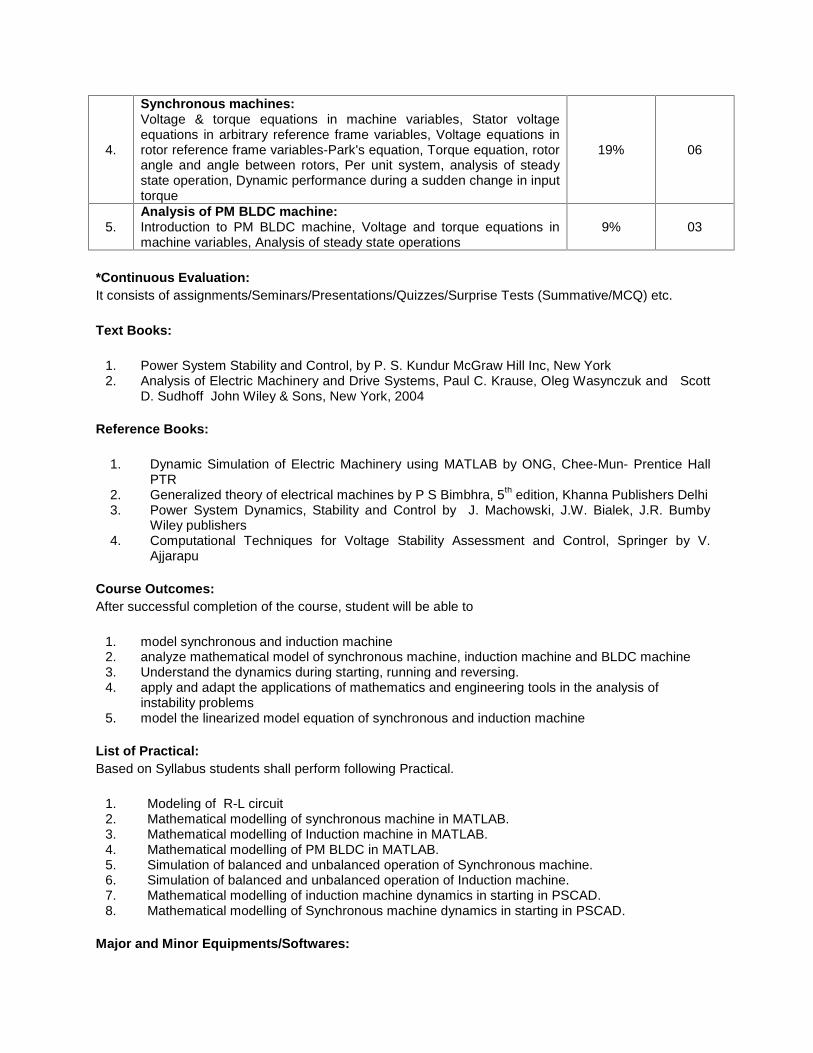
Synchronous machines:Voltage & torque equations in machine variables, Stator voltageequations in arbitrary reference frame variables, Voltage equations inrotor reference frame variables-Park's equation, Torque equation, rotorangle and angle between rotors, Per unit system, analysis of steadystate operation, Dynamic performance during a sudden change in inputtorque
19% 06
5.Analysis of PM BLDC machine:Introduction to PM BLDC machine, Voltage and torque equations inmachine variables, Analysis of steady state operations
9% 03
*Continuous Evaluation:It consists of assignments/Seminars/Presentations/Quizzes/Surprise Tests (Summative/MCQ) etc.
Text Books:
1. Power System Stability and Control, by P. S. Kundur McGraw Hill Inc, New York2. Analysis of Electric Machinery and Drive Systems, Paul C. Krause, Oleg Wasynczuk and Scott
D. Sudhoff John Wiley & Sons, New York, 2004
Reference Books:
1. Dynamic Simulation of Electric Machinery using MATLAB by ONG, Chee-Mun- Prentice HallPTR
2. Generalized theory of electrical machines by P S Bimbhra, 5th edition, Khanna Publishers Delhi3. Power System Dynamics, Stability and Control by J. Machowski, J.W. Bialek, J.R. Bumby
Wiley publishers4. Computational Techniques for Voltage Stability Assessment and Control, Springer by V.
Ajjarapu
Course Outcomes:After successful completion of the course, student will be able to
1. model synchronous and induction machine2. analyze mathematical model of synchronous machine, induction machine and BLDC machine3. Understand the dynamics during starting, running and reversing.4. apply and adapt the applications of mathematics and engineering tools in the analysis of
instability problems5. model the linearized model equation of synchronous and induction machine
List of Practical:Based on Syllabus students shall perform following Practical.
1. Modeling of R-L circuit2. Mathematical modelling of synchronous machine in MATLAB.3. Mathematical modelling of Induction machine in MATLAB.4. Mathematical modelling of PM BLDC in MATLAB.5. Simulation of balanced and unbalanced operation of Synchronous machine.6. Simulation of balanced and unbalanced operation of Induction machine.7. Mathematical modelling of induction machine dynamics in starting in PSCAD.8. Mathematical modelling of Synchronous machine dynamics in starting in PSCAD.
Major and Minor Equipments/Softwares:

1. Matlab2. Mi-Power/ETAP3. PSCAD

PARUL UNIVERSITY-FACULTY OF ENGINEERING &TECHNOLOGY
DEPARTMENT OF ELECTRICAL ENGINEERINGM.TECH. – ELECTRICAL ENGINEERING
SYLLABUS FOR 2ND SEMNON CONVENTIONAL ENERGY SOURCES (03207180)
ACADEMIC YEAR 2015-16
Type of Course: ELECTRICAL ENGINEERING
Prerequisite: Knowledge of basic electrical engineering.
Rationale: The course provides introductory treatment of the field of electrical energy sources otherthan conventional sources
Teaching and Examination Scheme:Teaching Scheme
(Hrs/Week)Credit
Examination Scheme
TotalL T P
External InternalTheory Practical Theory *C.E. Practical
3 2 0 5 60 30 20 20 20 150
L- Lectures; T- Tutorial; P- Practical; C.E. -Continuous Evaluation
Contents:Sr.No.
Topic Weightage TeachingHrs.
1.
Introduction :Worlds Production and reserves of commercial energy sources,India’s Production and reserves, Global environmental concern, KyotoProtocol, Concept of Clean Development Mechanism (CDM) andPrototype Carbon Funds (PCF). Factors favoring and againstrenewable energy sources
10% 5
3.
Solar Energy:Definition, Energy available from Sun, Solar radiation data,measurement and estimation, solar energy conversion into heat, Flatplate and Concentrating collectors, Principle of natural and forcedconvection,Solar Photovoltaic: Introduction to solar cells , solar cellcharacteristics, losses in solar cells , Model of a solar cell , emergingsolar cell Technologies Solar PV modules from solar cells , Mismatchin module , hot spots in the module , Bypass diode , Design andstructure of PV modules , PV module power output, I-V and powercurve of module BOS of PV system, Batteries, Battery chargecontrollers ,DC to DC Converters , DC to AC Converters for AC loads,Supporting structures for mounting the PV panels , MPPT, Differentalgorithms for MPPT, Types of PV systems, Design methodology ofstandalone PV system.
27% 13
4.Wind energy:Wind speed and power relation, power extracted from wind, Energyavailable from wind, wind distribution and wind speed predictions,
27% 13

Sr.No.
Topic Weightage TeachingHrs.
General formula, Lift and drag. Basis of Wind energy conversion.Wind power systems: system components, Types of Turbine, Turbinerating, Choice of generators, electrical load matching, Variable speedoperation, maximum power operation, control systems, system designfeatures, stand alone and grid connected operation
6.
HYDROGEN ENERGY:Introduction to fuel cells, commercial and manufacturing issues,equivalent circuit, Hydrogen production by electrolysis, stackconfiguration, thermo-chemical method & applications Hydrogenstorage, transportation, utilization of hydrogen gas, safety &management, hydrogen technology development in India.FUEL CELL: Introduction, principle of operation, fuels and electrolytesfor fuel cells, Hydrogen fuel cell, solid oxide fuel cell and moltencarbonate fuel cell. Advantages & Disadvantages of fuel cell,Application of fuel cells.Storage systems:Parameters, lead-acid batteries, ultra-capacitors, flywheels,superconducting magnetic storage system, pumped hydroelectricenergy storage, compressed air energy storage.
27% 13
7
Policy:Renewable energy development policy, Renewable energy industries,international co-operation, HRD and career growth opportunities,consultancy areas. Scope: Future thrust areas in renewable energydevelopment.
8% 4
Text Books:
1. Non-conventional Energy Sources by G.D. Rai, S. Chand Publication.
Reference Books:
1. Generation of Electrical Energy by B.R. Gupta.2. Renewable Energy Sources & Conversion Technology by N.K. Bansal, Kleemann, Meliss3. Solar Energy- Principle of Thermal collector and storage by S. P Sukhatme, Third edition, TMH
publication4. Solar Photo Voltaic by Chetan Singh Solanki, PHI learning Pvt Ltd., New Delhi,20095. Renewable energy technologies by R. Ramesh6. Fuel Cell System by Leo J.M.J. Blomen and Michael N. Mugerwa, New York, Plenum Press, 1993.7. Solar Cells: Operating Principles, technology and System Applications by Green M.A, Prentice Hall
Inc, Englewood Cliffs N.J, U.S.A, 19828. Wind Energy Explained, theory design and applications by J.F. Manwell, J.G. McGowan, Wiley
publication9. Principles of Solar Engineering by D. Y. Goswami, F. Kreith and J. F. Kreider, Taylor and Francis,
Philadelphia, 2000.
List of Practical:Based on Syllabus students shall perform following Practical.
1. Impact of Distributed Generations With Energy Storage Devices on the Electric Grid2. Performance Analysis of Wind Turbine as a Distributed Generation Unit in Distribution System.3. MATLAB/Simulink Based Modeling of Solar Photovoltaic Cell.

4. Simulation and Analysis of Wind Energy and Photo Voltaic Hybrid System in distribution network.
List of Open Source Software/learning website:E-materials available at the website of Bureau of Energy Efficiency:http://beeindia.in/content.php?page=miscellaneous/useful_download.php
Course Outcome:After learning the course the students shall be able to:
1. List and generally explain the main sources of energy and their primary applications in the India,and the world.
2. Describe the challenges and problems associated with the use of various energy sources,including fossil fuels, with regard to future supply and the environment.
3. Discuss remedies/potential solutions to the supply and environmental issues associated with fossilfuels and other energy resources.
4. List and describe the primary renewable energy resources and technologies.
Major equipment/ software:
1. Matlab
PARUL UNIVERSITY-FACULTY OF ENGINEERING &TECHNOLOGY
DEPARTMENT OF ELECTRICAL ENGINEERINGM.TECH. – ELECTRICAL ENGINEERING
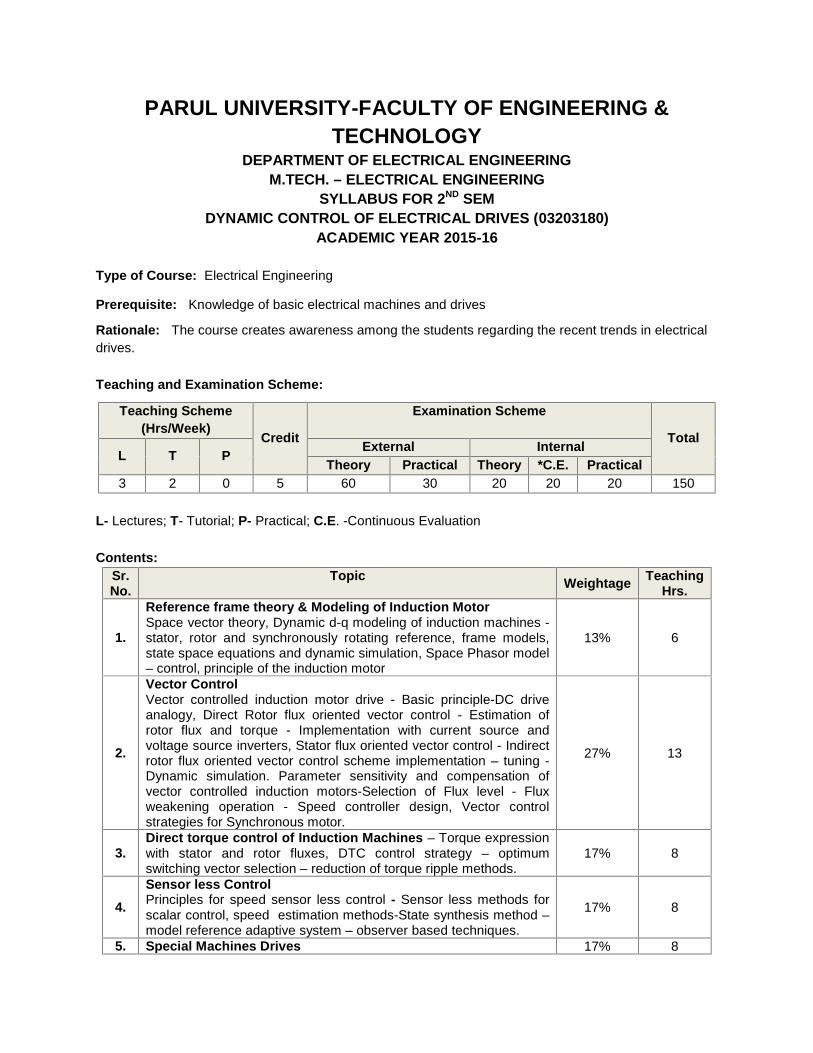
SYLLABUS FOR 2ND SEMDYNAMIC CONTROL OF ELECTRICAL DRIVES (03203180)
ACADEMIC YEAR 2015-16
Type of Course: Electrical Engineering
Prerequisite: Knowledge of basic electrical machines and drives
Rationale: The course creates awareness among the students regarding the recent trends in electricaldrives.
Teaching and Examination Scheme:
Teaching Scheme(Hrs/Week)
Credit
Examination Scheme
TotalL T P External Internal
Theory Practical Theory *C.E. Practical3 2 0 5 60 30 20 20 20 150
L- Lectures; T- Tutorial; P- Practical; C.E. -Continuous Evaluation
Contents:Sr.No.
Topic Weightage TeachingHrs.
1.
Reference frame theory & Modeling of Induction MotorSpace vector theory, Dynamic d-q modeling of induction machines -stator, rotor and synchronously rotating reference, frame models,state space equations and dynamic simulation, Space Phasor model– control, principle of the induction motor
13% 6
2.
Vector ControlVector controlled induction motor drive - Basic principle-DC driveanalogy, Direct Rotor flux oriented vector control - Estimation ofrotor flux and torque - Implementation with current source andvoltage source inverters, Stator flux oriented vector control - Indirectrotor flux oriented vector control scheme implementation – tuning -Dynamic simulation. Parameter sensitivity and compensation ofvector controlled induction motors-Selection of Flux level - Fluxweakening operation - Speed controller design, Vector controlstrategies for Synchronous motor.
27% 13
3.Direct torque control of Induction Machines – Torque expressionwith stator and rotor fluxes, DTC control strategy – optimumswitching vector selection – reduction of torque ripple methods.
17% 8
4.Sensor less ControlPrinciples for speed sensor less control - Sensor less methods forscalar control, speed estimation methods-State synthesis method –model reference adaptive system – observer based techniques.
17% 8
5. Special Machines Drives 17% 8

Sr.No.
Topic Weightage TeachingHrs.
Brushless DC drives-principle, performance and inverter controlstrategies, PMSM motor, d-q modelling, SRM configuration and itscontroller design - converter topologies - control strategies-.
6 Control of induction motor drives using fuzzy logic control and neuralnetwork control. 10% 5
Reference Books:
1. Power Electronics and Variable frequency drives by Bimal.K. Bose, Standard PublishersDistributors, New Delhi, 2000
2. Power Semiconductor controlled drives by Dubey G.K., Prentice Hall inc, A division of Simonand Schester England cliffs, New Jersey, 1989.
3. Thyristor control of AC motor by Murphy J.M.D, Turnbull, F.G, Pergamon press, Oxford, 1988.4. Power Electronic and Motor control by Sheperal, Wand Hully, L.N. Cambridge University Press
Cambridge, 1987.5. Power Semiconductor drives by Dewan, S. Slemon B., Straughen, A. G.R., John Wiley and
Sons, NewYork, 1984.
Course Outcome:After learning the course the students shall be able to:
1. Recognize importance of electrical energy and its day to day applications.2. Understand the role of resistor, capacitor and inductor and their behavior3. Understand electrical current, potential difference, power and energy, sources of electrical
energy.4. Perform qualitative comparison between AC and DC system, single phase and three phase
systems.
List of Practical:
1. Simulink implementation of modeling of Induction Motor.2. Simulation of Vector Control of Induction Motor.3. Simulation of Open Loop Control of BLDC for Clockwise Rotation.4. Simulation of Open Loop Bidirectional Control of BLDC.5. Modeling & Simulation of PMSM.6. Modeling & Simulation of Vector Control of PMSM.7. Development of fuzzy/neural network controller for Induction motor drive.
Major and Minor Equipments:
MATLAB SOFTWARE.

PARUL UNIVERSITY-FACULTY OF ENGINEERING &TECHNOLOGY
DEPARTMENT OF ELECTRICAL ENGINEERINGM.TECH. – ELECTRICAL ENGINEERING
SYLLABUS FOR 2ND SEMDIGITAL SIGNAL PROCESSING AND PROCESSOR (03203181)
ACADEMIC YEAR 2015-16Type of Course: Electrical Engineering
Prerequisite: Knowledge of C-programming and advanced mathematics.
Rationale: This course will provide the student with an intuitive and practical understanding of thefundamental concepts of discrete-time signal processing and application development using digital signalprocessor.
Teaching and Examination Scheme:Teaching Scheme
(Hrs/Week)Credit
Examination Scheme
TotalL T P External Internal
Theory Practical Theory *C.E. Practical3 2 0 5 60 30 20 20 20 150
L- Lectures; T- Tutorial; P- Practical; C.E. -Continuous Evaluation
Contents:Sr.No.
Topic Weightage TeachingHrs.
1.
CLASSIFICATION OF SYSTEMS:Continuous, discrete, linear, causal, stable, dynamic, recursive, timevariance; classification of signals: continuous and discrete, energyand power; mathematical representation of signals; spectral density;sampling techniques, quantization, quantization error, Nyquist rate,aliasing effect. Digital signal representation.
10% 5
2.
DISCRETE TIME SYSTEM ANALYSIS: Convolution problemIntroduction to transformation, and Z transform Relation between Zand S plane, Region of Convergence, Properties of ROC andproblem, Z transform and its properties, Inverse Z transform andrelated problems by long division method and partial fractionmethod, Inverse Z transform by Residue
21% 10
3.DISCRETE TIME SEQUENCESDiscrete Fourier Transform (DFT) and Fast Fourier Transform
(FFT), Linear Time-Invariant Systems, Digital Filters, Decimationand Interpolation
6% 3
4.
DIGITAL FILTER DESIGN TECHNIQUESParallel & cascade forms. FIR design: Windowing Techniques –Need and choice of windows – Linear phase characteristics. IIRdesign: impulse invariance method, Bilinear transformationtechnique Butterworth approximation for IIR design, Warping, Prewarping – Frequency transformation, Comparison of IIR and FIRDigital filters.
17% 8
5. TMS320F2x DSP CONTROLLER: 42% 20

Sr.No.
Topic Weightage TeachingHrs.
TI 2000 DSP core architecture (TMS320F2812 / TMS320F28335),Pin diagram, memory maps, instruction set, addressing modes,GPIO functionality, Interrupts, ADC channels, Event managers forpulse width modulation and capture unit.
6.DSP BASED APPLICATIONS :Implementation of DC-DC Boost converter, DSP Based Scalarcontrol of Induction motor drive.
4% 2
Text Books:
1. Discrete-Time Signal Processing (Second Edition) by Alan V. Oppenheim, Ronald W. Schafer,and John R. Buck, Pearson Education India
Reference Books:
1. Digital Signal Processing: Principles, Algorithms and Applications (3rd Edition) by John G.Proakis, Dimitris G. Manolakis, and D Sharma, Pearson Education India
2. Digital Signal Processing using MATLAB by Vinay K. Ingle, John G. Proakis3. Digital Signal Processing by S.Salivahanan, A.Vallavaraj and C.Gnanapriya, TMH, 2000.4. Digital Signal Processing by A.V. Oppenheim and R.W.Schafer, Englewood Prentice-Hall, Inc,
1975.5. Digital Signal processing – A computer based approach by Sanjit K. Mitra, Tata McGraw Hill
Edition6. DSP Based Electro Mechanical Motion Control by Hamid.A.Toliyat and Steven G.Campbell, CRC
Press New York, 2004.7. TMS320F2812/28335 DSP datasheet from Texas Instruments
Course Outcome:After learning the course the students shall be able to:
1. Classify signals and systems & their mathematical representation.2. Analyze Linear Time Invariant Systems3. Apply various transformation techniques & their computation.4. Design filter for digital implementation.5. Generate pulse width modulated output using TMS320F2812/28335 high performance DSP.6. Develop applications using digital signal processor.
List of Practical:Based on Syllabus students shall perform following Practical.
1. Write MATLAB code to generate: Sine, Triangular and Square Wave.2. Write a MATLAB code to evaluate DTF and IDFT of a discrete sequence.3. To write a MATLAB program to perform convolution of two given sequences.4. Study of FDA tool for filter design.5. Study of SP tool for filter design.6. Write a program to blink LED with 1 Hz and 0.5 Hz frequency on GPIO using TMS320F2812/
28335 DSP.7. Write a program to generate PWM sequence using continuous up and continuous up-down
counting mode using TMS320F2812/28335 DSP for DC-DC converter.

8. Write a program to generate sinusoidal PWM using TMS320F2812/28335 DSP for DC-ACinverter.
Major Equipments:
1. High performance simulation software like Orcad Capture PsPICE, MULTISIM, MATLAB.2. Digital Signal Processing development board of Texas Instruments TMS320F2812 / 28335.3. 4 channel 1GS/s isolated digital storage oscilloscope with 1x-10x probes.4. Digital Multimeter5. Regulated DC power supply with higher current ratings.

PARUL UNIVERSITY-FACULTY OF ENGINEERING &TECHNOLOGY
DEPARTMENT OF ELECTRICAL ENGINEERINGM.TECH. – Electrical Engineering
SYLLABUS FOR 2ND SEMROBOTICS AND AUTOMATION (03203182)
ACADEMIC YEAR 2015-16
Type of Course: Electrical Engineering
Prerequisite: Knowledge of Control Engineering PLC, Micro controller
Rationale: This subject provides overall generalized concepts of various robots which can be useful insolving various problems in the field of engineering which includes manipulators and kinamatics.
Teaching and Examination Scheme:Teaching Scheme
(Hrs/Week)Credit
Examination Scheme
TotalL T P
External InternalTheory Practical Theory *C.E. Practical
3 2 0 5 60 30 20 20 20 150
L- Lectures; T- Tutorial; P- Practical; C.E. -Continuous Evaluation
Contents:
Sr.No.
Topic Weightage TeachingHrs.
1.
INTRODUCTION TO ROBOTICS:Evaluation of robots &robotics, Laws of Robotics, PrograssiveAdvancement in Robots, Robot Anatomy, Human armCharacteristics, Design & Control issues, Manipulation &Control,Sensors &Vision, Programming Robots, The future prospects
6% 3
2.
ROBOT ANATOMY:COORDINATE FRAMES-MAPPING &TRANSFORMCoordinate frames-mapping- mapping Between rotated frames-mapping between translated frames-mapping between rotated andtranslated frames-description of objects in space transformation ofvectors—inverting homogeneous transform-fundamental rotationmatrices.
8% 4
3.SYMBOLIC MODELING OF ROBOTS –DIRECT KINEMATICMODELMathematical structure and notations-description of links and joints-kinematic modeling of the manipulator- Denavit-Hatenberg notation-
6% 3
4.THE INVERSE KINEMATICSManipulator work space – Solvability of kinematic model- -Solutiontechniques- closed form solution-guidelines to obtain closed formsolution.
17% 8
5.MANIPULATOR DIFFERENTIAL MOTION AND STATICSLinear and angular velocity of a rigid body - Relationship betweentransformation Matrix and angular velocity - Mapping velocity vector-
8% 4

Sr.No.
Topic Weightage TeachingHrs.
Velocity propagation along links-Manipulator Jacobian - JacobianInverse- Jacobian Singularities- Static Analysis
6.DYNAMIC MODELLINGLagrangian Mechanics – Two degree of freedom Manipulator-Dynamic Model – Lagrange–Euler formulation - Newton –EulerFormulation – comparison of Lagrange–Euler & Newton
8% 4
7.TRAJECTORY PLANNINGDefinitions and planning tasks- terminology-steps in trajectoryplanning- Joint space techniques-Cartesian space techniques- Jointspace Vs Cartesian space Trajectory planning.
19% 9
8.
CONTROL OF MANIPULATORSOpen and close loop control – The manipulator control problem –Linear control schemes-Characteristics of second order linearsystems- Linear Second order- SISO model of manipulator joint-Joint Actuators - computed torque control- force control of roboticmanipulators – Force-control strategies-Force/Torque control
17% 8
9.
ROBOTIC SENSORS AND APPLICATIONSSensing- Sensors in robotics – Kinds of sensors used in robotics- -Robotic vision- Robotic vision- Industrial applications of visioncontrolled robotic systems- process of Imaging-Architecture ofrobotic vision systems - Image Acquisition- Image representation-Image processing – Industrial applications - Robot applications andapplication planning, Justification of robots- Robot safety
10% 5
Text Books:
1. Robotics Fu K. S., Gonzalez R C., Lee C S G. McGraw - Hill Education, New Delhi Pvt Ltd
Reference Books:
1. Robotics for Engineers, Koren Yoram McGraw - Hill Education, New Delhi, 1 st Edition2. Robot Reliability and safety Dhillon, B.S. Springer3. Introduction to Robotics: Analysis, Systems, Applications, A. B. Niku, Prentice Hall, ISBN: 0-13-
061309-64. Robot Manipulators: Mathematics, Programming, and Control, R. P. Paul, MIT Press, ISBN 0-262-
16082-X
Course Outcome:After learning the course the students shall be able to:
1. Familiar with the history, concept development and key components of robotics technologies.2. Recognize basic mathematic manipulations of spatial coordinate representation and
transformation.3. Comprehend and able to solve basic robot forward and inverse kinematics problems.4. Comprehend and able to solve basic robotic dynamics, path planning and control problems.5. Able to undertake practical robotics experiments that demonstrate the above skills.
List of Tutorials:Based on Syllabus students shall perform following Tutorials.
1. Study of basic concepts in Robotics.

2. Spatial descriptions and transformations using MATLAB3. Manipulator kinematics: DH parameter and forward pose kinematic transformation for the
planner 3-DOF, 3R robot using MATLAB.4. Inverse Manipulator kinematics: DH parameter and forward pose kinematic transformation for
the planner 3-DOF, 3R robot using MATLAB.5. Manipulator Dynamics: write a MATLAB programme for implement the recursive Newton- Euler
inverse dynamic solution.6. Write a MATLAB program to implement the joint-space trajectory generation.7. Case study on Linear Control Manipulator and Nonlinear control Manipulator.
Major and Minor Software and Hardware:Mat Lab, PLC, Java, Micro controller