path control in robotics me 4135 lecture series 8 richard r. lindeke, ph. d
Post on 21-Dec-2015
220 views
TRANSCRIPT

Path Control in Robotics
ME 4135Lecture series 8
Richard R. Lindeke, Ph. D.

Motion Types of Interest Point – to – Point Motion:
All Axes start and end simultaneously All Geometry is computed for targets and relevant
Joint changes which are then forced to be followed during program execution
Path or Trajectory Controller Motion Here the motion is performed through a time
sequence of intermediate configurations computed ahead of time (like above but without stop-start operation) or in real time
Paths are “Space Curves” for the n-Frame to follow This motion is a continuous scheme to move the TCP
from one location to the next along a desired (straight or curved) line under direct operational control

Path Control and Motion Types:
We will explore the following types of Motion: Lead Through Path Creation (Cubic) Polynomial Paths w/ Via Points Minimum Time Trajectory w/ controlled
Acceleration Lower order Path-Poly Control
LSPB Paths Craig’s Method for acceleration smoothing Strict Velocity Control
Joint Interpolated Control Full Cartesian Control

Basically this was a technique whereby a skilled operator took a robot arm (for welding or painting) and used it like his/her weld tool or paint sprayer and performed the required process at reasonable speed
The robot is equipped with a position recording device and memorizes a large number of points during the teaching session
These learned points then would be “played back” to replicate the skilled operators motions
Lead Through Path Creation

Lead Through Path Creation
Advantages: Simple way to create complex paths All points are sure to be physically attainable Playback speed can be controlled by an
external device Disadvantages:
Precision placements are required (program must be replayed at exactly the initial placement)
Major concern with operator safety: robot is powered and operator is physically touching it (OSHA rules it unsafe practice!)

Modern Path Control:(Lets look at a simple example)
Dr. D’s new ‘Self-powered Automated Coffee Drinker’ Robot
It is a simple cantilevered Cartesian device equipped with a spherical wrist that responds to eye movement and thoughts to help the overworked design engineer get coffee while designing and drafting & typing of Reports
It follows a straight line path from the cup’s point on a table to the worker’s mouth in ½ second

Lets look at a simple example:

Lets look at a simple example:
We see that the ‘Bot must travel a space path of 16.45” which can be decomposed into a movement of 9.5” along each of the prismatic joints
For ‘accuracy’ lets divide each of the these joint paths into 100 segments
From Physics: Vjoint d/ t = (9.5/100)/(.5/100) = 19in/second (a reasonable speed!)

Lets look at a simple example:
During the 1st Step then: Joint 1 starts at 0 and moves to 0.095” Moves there in 0.005 seconds How will it do it? Of course by Accelerating from a stop to 19
in/sec in 0.005 seconds Compute Accreqr V/t Darn – this says that
the acceleration is 3800in/sec2 – this is 10G!!!!!

Lets look at a simple example:
So this will certainly be difficult to accomplish! (more likely it will not work)
OSHA would be just as upset as when we had the worker holding on to the powered robot – what should we do?
I think our approach is too naïve! If we examine the Pos vs. Time, Vel Vs. Time
and Acc vs. Time plots we may see why:

Look at a simple example’s Trajectory Curves:

This is Physically Impossible (or rather ‘very energy intensive’)
Can we build a reasonable solution that keeps the acceleration to an achievable level?
What this would mean is we wouldn’t “instantly” – in one time step – go from stopped to full speed
This can be achieved with a “time polynomial” model of motion

Building a ‘Path Polynomial’ Motion Set
2 30 1 2 3
21 2 3
2
2 32
2 3
2 6
q t a a t a t a t
dqq t a a t a t
dt
d qq t a a t
dt
These are the ‘trajectory’ equations for a joint (Position,
Velocity and Acceleration)

Solving the ‘Path Polynomial’ is a matter of finding ai’s for SPECIFIC PATHS
We would have “boundary” conditions for position and velocity at both ends of the path
We would have the desired total time of travel
Using these conditions we can solve for a0, a1, a2 and a3 to build a 3rd order path polynomial for the required motion

Solving the ‘Path Polynomial’ is a matter of finding ai’s for specific paths
2 30 0 1 0 2 0 3 0
20 1 2 0 3 0
2 30 1 2 3
21 2 3
2 3
2 3
f f f f
f f f
q a a t a t a t
q a a t a t
q a a t a t a t
q a a t a t
‘Poly’s’ holding at starting time and position
‘Poly’s’ holding at ending time and position

Solving the ‘Path Polynomial’ is a matter of finding ai’s for specific paths
Writing these as Matrix Forms:
2 3000 0 0
2010 0
2 32
23
1
0 1 2 3
1
0 1 2 3ff f f
ff f
qat t t
qat t
qat t t
qat t

Solving the ‘Path Polynomial’ is a matter of finding ai’s for specific paths
If we set t0 = 0 (starting time is when we start counting motion!) then:
00
012 3
22
3
1 0 0 0
0 1 0 0
1
0 1 2 3f f f f
f f f
qa
qa
t t t qa
t t qa
By examination, a0 = q0 & a1 = q0(dot)

Solving the ‘Path Polynomial’ is a matter of finding ai’s for specific paths
Completing the solution consists of forming relationships for: a2 & a3
Done by substituting a0 & a1 values and solving the last two equation simultaneously:
0 022
0 033
3 2
2
f f f
f
f f f
f
q q t q qa
t
q q t q qa
t
Be Careful and note the order of the positions and velocities!

Applying it to the Coffee ‘Bot
Start: X = 0; v = 0 @ time = 0 End: X = 9.5”; v = 0 @ time = .5
sec a0 = 0 ; a1 = 0 a2 = (3 * 9.5)/(0.52) = 114 a3 = (2 *(- 9.5))/(0.53) = -152

Applying it to the Coffee ‘Bot
Here (specifically):
2 3
2
0 0 114 ( 152)
0 2(114) 3( 152)
2(114) 6( 152)
i i i i
i i i
i i
q t t t
q t t
q t

Applying it to the Coffee ‘Bot
Simplifying:
2 3
2
114 152
228 456
228 912
i i i
i i i
i i
q t t
q t t
q t

Applying it to the Coffee ‘Bot: Position
Position vs. Time

Applying it to the Coffee ‘Bot: Velocity
Joint Velocity Vs. Time

Applying it to the Coffee ‘Bot: Acceleration
Acceleration Vs. Time

Applying it to the Coffee ‘Bot
Using the Path Polynomial Approach: Max Velocity is: 28.5 in/sec (compares to 19
in/sec) Max Acceleration is: 228 in/sec2 (.6 g) compared
to 10 g But, in this method, I require a 100% duty cycle
motor since throughout the entire path, the motor is accelerating (either with positive or negative orientation)
Can we make a path solution where we accelerate for only part of the path? Turns out we can and
we will call it LSPB!

Studying the LSPB model
In this model, we will carry forward with a ‘parabolic model’
In this model, we will determine a time where we will blend from startup until we reach a constant velocity – (and its greater than 1/100 of the total time!)
Here we will see an acceleration followed by a period of “coasting” and then deceleration (often called a trapezoidal velocity model)

Model Building: We must define an acceleration constraint (minimum
value) such that the acceleration guaranteed to be completed within half of the allocated time period of the travel:
min 2 2
2
4
2
12
( )2
2
B A B A
B A
q q q qq
tt
Pos qt
tt half time
q qPos
based on solving:
at:
we want: =
This assures that there is no overlap for the ‘BLEND Regions’

Looking at the motion over the various regions:
During Region 1 (while the joint is Accelerating) (time interval 0 to tblend [tb]) the Joint moves:
q = (V/2)*tb
tb is the acceleration time
During the region of ‘Constant Velocity’ the Joint moves: q = V*(t – 2tb)
During Region 3 -- while the joint is decelerating the joint moves: q = (V/2)*tb
Total travel distance is qB - qA

Writing a motion equation:
0
22 22
:
b b b bB A t t t t t t t
B A b b b
B A b b b
b
q q q q q
V Vq q t V t t t
q q Vt Vt Vt Vt Vt
BUT
V qt

Substituting and Isolating the Unknown (blend time):
2
2 0
B A b b
b b B A
q q qt t qt
qt qt t q q
reforming:
This is a quadratic equation in tb
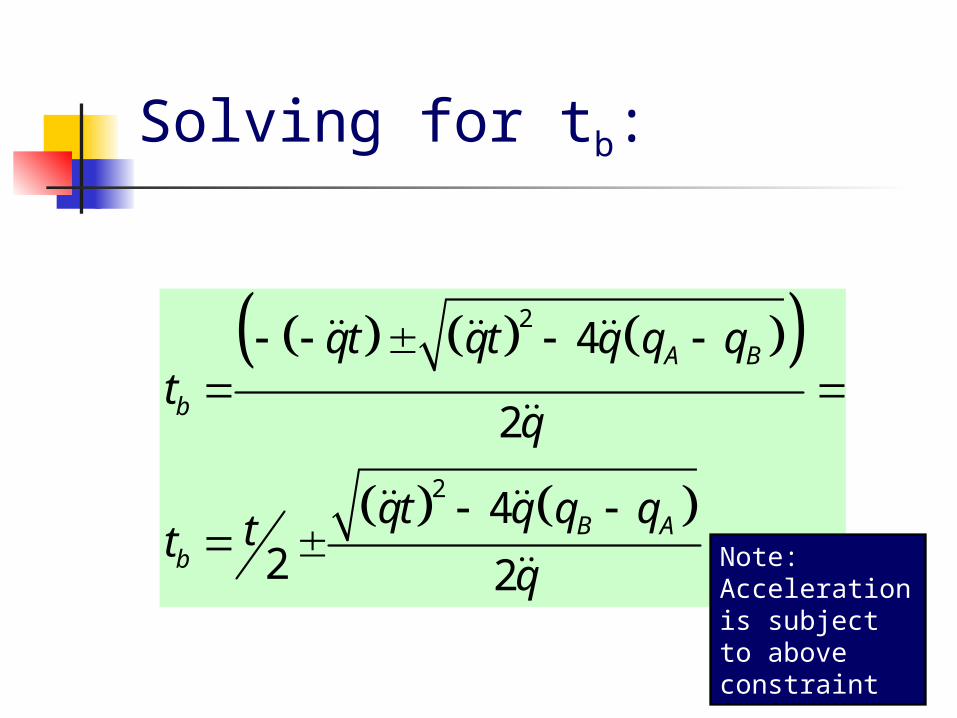
Solving for tb:
2
2
4
2
42 2
A B
b
B Ab
qt qt q q qt
q
qt q q qttq
Note: Acceleration is subject to above constraint

Applying it to the Coffee ‘Bot
Acceleration constraint:
Blend time:
22
2
2
4 9.5 0152 / sec 0.4
.5
' ' 175 / sec
.25 175 4 175 9.5.25
2 175
1006.25.25 .25 0.091
350.25 0.091 .159sec
b
b
q in g
lets pick q in
t
t

Applying it to the Coffee ‘Bot
tlinear=.5 – 2*0.159 = 0.181 s
Linear Velocity:
Positions: By tb, Joint moves: (27.89/2)*.159 = 2.222 in During linear velocity joint moves: 0.181*27.89
= 5.055 in (thus the pos = 7.277”) During deceleration joint travels 2.222 in Adding them gives full travel distance: 2.222 +
5.055 + 2.222 in 9.5in
175 .159 27.89lin bV q t in/sec

Plotting the Path trajectory:
Notice: the accelerator is ‘off’ during the linear travel segment

The 2 Previous Path Control Methods focused on Start/Stopping Approaches
What can we do if we desire to travel by ‘G12’ methods – continuing along a path w/o stopping?
Here we will focus on a method called ‘dog-tracking’ after the lead and follow techniques employed in dog racing
Essentially we would have a situation where the path is laid out (as a series of Via Points) and the joints smoothly maneuver through and between them

Craig’s Dog Tracking Method

Craig’s Dog Tracking Method Upon Examination of the motion, we find
that there are three ‘regimes’ in the motion These are:
Start up regime Intermediate regimes Stopping regime
Starting and Stopping are similar to LSPB in the way they compute blend time and acceleration
During an Intermediate regime we compute acceleration by comparing incoming and outgoing velocities about each point

Craig’s Dog Tracking Method
Starting regime Equations:
1 2 1
2 2 11 12 12
1
2 112
12 1
12 12 1 2
2
.5
.5
global
d d
d
l d
SGN
t t t
t t
t t t t
Start Acceleration
Start Blend Time
Linear Velocity 1→2
Time @ linear Velocity

Craig’s Dog Tracking Method
Stopping Equation:
1
2 11 1
11
1
11 1
2
.5
.5
n n n global
n nn d n n d n n
n
n nn n
nd n n
n nl n n d n n
SGN
t t t
t t
t t t t
Stop ‘acceleration’
Stop Blend Time
L. Velocity to stop
Time @ L. Velocity
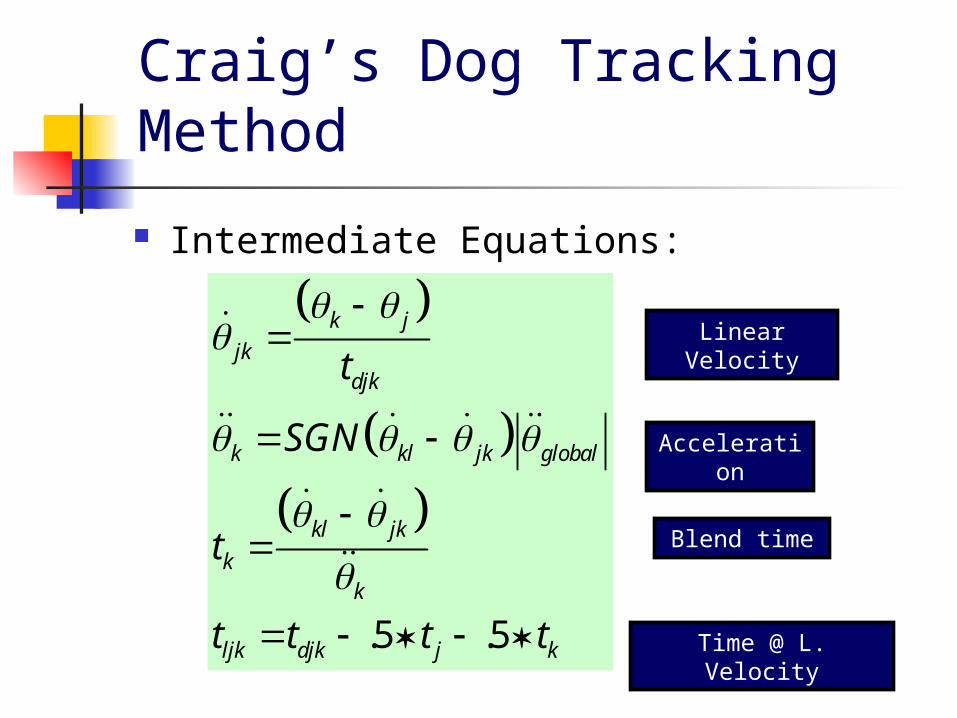
Craig’s Dog Tracking Method
Intermediate Equations:
.5 .5
k j
jkdjk
k kl jk global
kl jk
kk
ljk djk j k
t
SGN
t
t t t t
Linear Velocity
Acceleration
Blend time
Time @ L. Velocity

Upon examination of the set of equation on the previous 3 slides several point should be noted:
Start and Stop are essentially the same but very important differences must be noted
One can’t complete any of the regimes without looking ahead – actually looking ahead to the 2nd point beyond to see if a joint is stopping or continuing
Start/Stop require position/time relationships Intermediate regimes require velocity/time
relationships
Craig’s Dog Tracking Method

Craig’s Dog Tracking Method
Step 1: Calculate Global ‘usable’ acceleration (magnitude) constraint based on LSPB model applied Pairwise (1→2; 2→3; etc)
Step 2: Focus on Start and Stop Segments
Step 3: Complete the table of accelerations, blend times, linear velocity and time at linear velocity
2
4 i j
dij
t

Lets Expand on Dr. D’s Coffee Drinker ‘Bot:
Point Name
Position (inch)
Delta Position (inch)
Arrival Time (sec)
Delta Time (sec)
A 0 0 --- ----
B 9.5 9.5 0.5 .5
C 11 1.5 3.5 3
D 9.5 -1.5 6.5 3
E 0 -9.5 7.5 1

Lets Expand on Dr. D’s Coffee Drinker ‘Bot:
Step 1: Global Acc. Constraint
22
22
22
22
4 9.5152 / s
.54 1.5
0.67 /34 1.5
.67 /3
4 9.538 /
1
AB
BC
CD
DE
q in
q in s
q in s
q in s
This is largest – should work globally – but lets make sure it doesn’t miss so choose 200ips2
‘cause it’s easier to calculate and is only about .6g

Lets Expand on Dr. D’s Coffee Drinker ‘Bot:
Next we focus on the start & stop equations: Starting
Stopping
2
2
(9.5 0) 200 200
2 9.5.5 .5 0.1062009.5 21.3
.5 .5 .106
A
A
AB
q SGN ips
t s
q ips
2
2
9.5 0 200 200
2 0 9.51 1 0.049200
0 9.59.74
1 .5 0.049
E
E
DE
q SGN ips
t s
q ips
NOTE: can’t compute tlij yet – we lack the data!

Lets Expand on Dr. D’s Coffee Drinker ‘Bot:
Considering Intermediate B→C:
2
1.50.5
3
200 200
.5 21.25.103200
.5 .5 .106 .5 .103 .342
C BBC
dBC
B BC AB
BC AB
BB
lAB dAB A B
q qq ipst
q SGN q q ips
q qt sq
t t t t s
Now to finish the 1st segment:

Lets Expand on Dr. D’s Coffee Drinker ‘Bot:
On to “C→D” Segment
2
0.5
200 200
1 .005200
.5 .5 3 .5(.103) .5(.005) 2.946
D CCD
dCD
C CD BC
CD BCC
C
lBC dBC B C
q qq ipst
q SGN q q ips
q qt sq
t t t t s
back to finish B--C Segment

Lets Expand on Dr. D’s Coffee Drinker ‘Bot:
Now for Segment D→E:
!
2
9.74
200 9.74 ( .5) 200 200
0.049
3 .5 .5 2.974
1 .5 0.928
earlierDE
D DE CD
DE CDD
D
lCD C D
lDE D E
ipsq E
q SGN q q SGN ips
q qt sq
t t t s
t t t s
Completing Seg. C--D
Seg D--E
(is stop point!)

Summarizing
Pt POST. Time POS time
Ti (blend) Acc L. Vel
Time@L. Vel
A 0 0 ----- ---- .106 +200 21.3 .342
B 9.5 .5 9.5 .5 .103 -200.5
2.946
C 11 3.5 1.5 3 .005 -200-.5
2.974
D 9.5 6.5 -1.5 3 .046 -200 -9.74 .928
E 0 7.5 -9.5 1 .049 +200
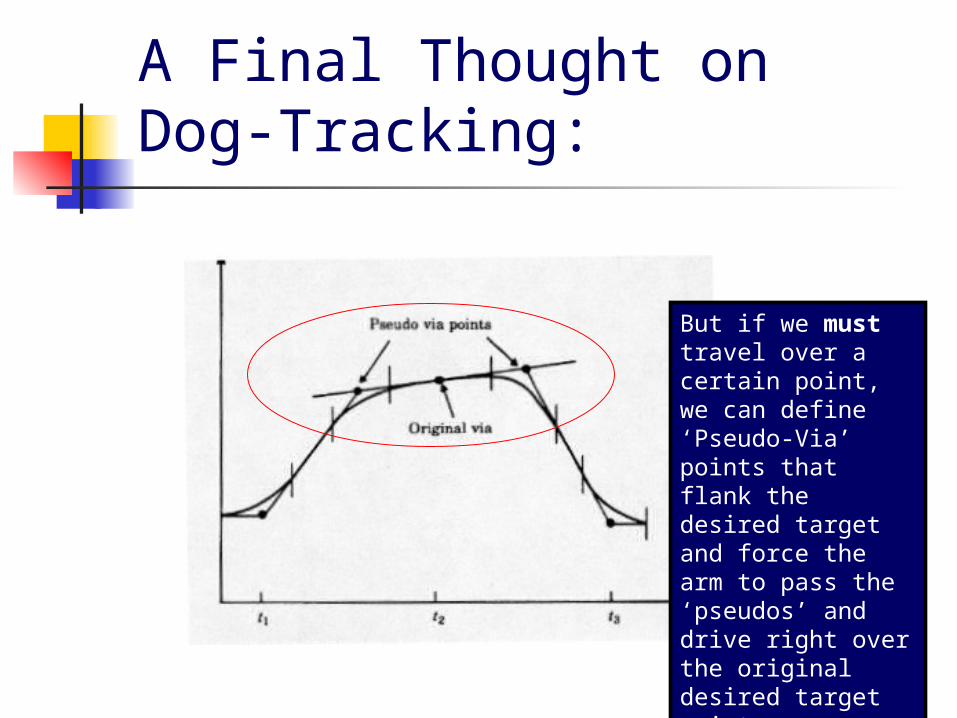
A Final Thought on Dog-Tracking:
But if we must travel over a certain point, we can define ‘Pseudo-Via’ points that flank the desired target and force the arm to pass the ‘pseudos’ and drive right over the original desired target point

Looking at Velocity Control
Achievable Path
Desired Path

With this “Velocity Control”
The acceleration is set and the new velocity for an upcoming segment is inserted at the appropriate time (place)
Over the segment, the arm (joints) lags the desired path
We extend the next path velocity curve to intersect the actual achievable path (to a point that is earlier in time than when we would have expected to change) this will mean that the joint can ‘catch up’ to the desired plan for the travel as it ‘blends’ to the new velocity