pcon-c(f)a/c(g)(f)b pcon-ca/cfa/cb/cgb/cfb/cgfb acon … · クイックスタートガイド...
TRANSCRIPT

PCON-C(F)A/C(G)(F)BACON-CA/C(G)BDCON-CA/C(G)BPCON-CA/CFA/CB/CGB/CFB/CGFB コントローラー
クイックスタートガイド
p1
p2
p3
p5
p12
p19
立ち上げ作業を始める前に
必要な機器を確認しよう
電源およびアクチュエーターを接続しよう
パソコン対応ソフトを接続しよう
アクチュエーターを動かしてみよう
ネットワーク配線をしよう
序章
STEP1
STEP2
STEP3
STEP4
STEP5
FAQ p32よくある質問
コントローラー消費電流、原点復帰、一時停止、押付け動作ネットワークでよく出るアラーム0A2,0A3
ACON-CA/CB/CGB コントローラーDCON-CA/CB/CGB コントローラー
DCON-CA/CB/CGB
ACON-CA/CB/CGB
PCON-CA/CB/CGB
PCON-CFA/CFB/CGFB
仕様
p20
p24
STEP6
STEP7
コントローラー側のネットワーク設定をしよう
PLCマスター側のネットワーク設定をしよう
p30STEP8 ネットワーク接続確認をしよう

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p1
型式の確認
本書では I/O種類がCC-Link仕様のコントローラーについて説明します。それ以外のI/O種類については記載がございませんので、予めご了承ください。
製番シール
コントローラー本体
序章 立ち上げ作業を始める前に
①
1 コントローラー本体左側面部分に張り付けられた製番シール“Model” 部分にコントローラー型式が記載されています。この項目⑤番目の記載(I/O種類を表示)が“CC”(CC-Link接続)となっているか確認ください。
② ③ ④ ⑤
Model
2 製番シール“Actuator” 部分に接続するアクチュエータ―型式が記載されています。この型式が、アクチュエータ―モーター部記載の型式と一致しているか確認ください。一致しない場合には、一致するアクチュエータ―と交換してください。
アクチュエーターモーター部
PCON-CA-56P WAI-CC-0-0-ABU-DN-**
<I/O種類>
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
NPPLN
DVRPPRTEP
: NPN仕様(シンクタイプ)(標準): パルス列制御NPN仕様 (シンクタイプ)
: DeviceNet 仕様: PROFIBUS-DP 仕様: PROFINET-IO 仕様: EtherNet/IP接続仕様
PNPLP
CCCNECML
: PNP仕様(ソースタイプ): パルス列制御NPN仕様 (シンクタイプ)
: CC-Link 仕様: CompoNet 仕様: EtherCAT接続仕様: MECHATROLINK-Ⅰ/Ⅱ仕様

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p2
STEP
1 必要な機器を確認しよう
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
本書では、CC-Link仕様のコントローラーPCONシリーズと、RCP6シリーズアクチュエーターの接続について説明します。また、ツール操作は、パソコン対応ソフトにて説明します。
P/A/DCONコントローラー 数量1型式例:PCON-CA/CFA/CB/CFB
RCP*アクチュエーター 数量1型式:RC**-***
モーターエンコーダーケーブル数量1
型式:CB-***
フィールドネットワーク接続コネクタ 数量1型式:MSTB2.5/5-STF-5.08AU
終端抵抗 数量2フィールドネットワーク接続コネクタと同封
電源コネクター 数量1型式:FMC1.5/8-ST-3.5
DC24V電源 数量1型式:PS-24*
ティーチングボックス型式:TB-02-*
パソコン対応ソフト型式:RCM-101-USB
※市販の24V電源でも可 ※ティーチングボックスとパソコン対応ソフトはどちらか一方の用意が必要
※アクチュエーターに付属
※コントローラーに付属※コントローラーに付属
以下の機器を用意してください。
OR
※コントローラーに付属

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p3
BK
S1S2MPI
MPO
24V0V
EMG-
+24V
+24V
0V
電源コネクター
接続図
電源およびアクチュエーターを接続しよう
電源コネクターへの配線
外部に非常停止スイッチを設ける場合は、青点線枠の箇所にドライ接点(b接)を追加してください(DC24V、10mA以下)。S1端子への+24V供給を断つことで非常停止状態となります。
POINT
コントローラー型式と接続するアクチュエーター型式によって、コントローラー消費電流は異なります。詳細は p32を参照してください。
!注意
①各配線線径は、次頁補足を参照ください。
②配線のむきせんストリップ部長さは10mmとします。
③橙色の突起部にマイナスドライバーを押し込んだまま端子口へ電線を奥まで挿入します。
④突起部からドライバ-を放します。
電源コネクターへの配線方法
STEP
2
コントローラーに電源を供給するため、電源コネクター取付と各端子へ配線を行います。右図と下記接続図を見ながら、 ~ の作業をしてください。
電源コネクターをコントローラー本体に挿入してください。
電源コネクター「S1」 端子にDC24V電源の+24V端子と接続してください。
電源コネクター「S2」 端子と 「EMG-」 端子を接続(短絡)します。
電源コネクター「MPI」 端子と 「MPO」 端子を接続(短絡)します。
電源コネクター「24V」 端子にDC24V電源の+24V端子と接続してください。
電源コネクター「0V」 端子にDC24V電源の0V端子と接続してください。
1
2
3
4
5
1 6
6
コントローラー/電源コネクター/電線
用意する物
D
C
2
4
V
電
源
2
3
4
5 6
10mm
電源コネクター
接続
1
PCON
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ
補足
p4
モーターエンコーダーケーブルを使用して、アクチュエーターと接続します。コネクターは、カチッと音がする部分まで差し込んでください。
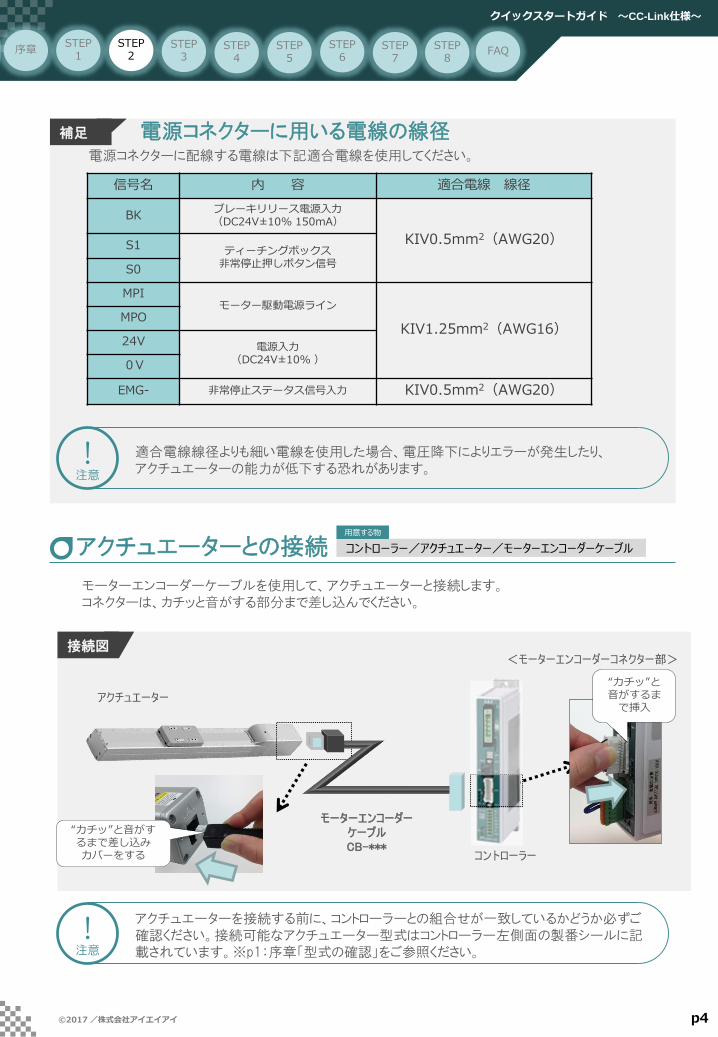
電源コネクターに用いる電線の線径
適合電線線径よりも細い電線を使用した場合、電圧降下によりエラーが発生したり、アクチュエーターの能力が低下する恐れがあります。
!注意
アクチュエーターとの接続
アクチュエーターを接続する前に、コントローラーとの組合せが一致しているかどうか必ずご確認ください。接続可能なアクチュエーター型式はコントローラー左側面の製番シールに記載されています。※p1:序章「型式の確認」をご参照ください。
!注意
コントローラー/アクチュエーター/モーターエンコーダーケーブル
用意する物
電源コネクターに配線する電線は下記適合電線を使用してください。
信号名 内 容 適合電線 線径
BKブレーキリリース電源入力(DC24V±10% 150mA)
KIV0.5mm2(AWG20)S1 ティーチングボックス非常停止押しボタン信号
S0
MPIモーター駆動電源ライン
KIV1.25mm2(AWG16)MPO
24V 電源入力(DC24V±10%)0V
EMG- 非常停止ステータス信号入力 KIV0.5mm2(AWG20)
コントローラー
<モーターエンコーダーコネクター部>
アクチュエーター
接続図
モーターエンコーダーケーブルCB-***
“カチッ”と音がするまで差し込みカバーをする
“カチッ”と音がするまで挿入
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p5
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
パソコン対応ソフトを接続しよう
パソコン対応ソフトのインストール
CD-ROMを挿入した際に起動方法の確認画面が表示される場合は、“自動再生”を選択してく
ださい。フォルダーの中身が表示された場合は“IAI_Install”をダブルクリックで実行してください。POINT
STEP
3
1パソコンのCDドライブにRCM-101-USB付属のCD-ROMを挿入します。
パソコン/RCM-101-USB
用意する物
アクション
インストールツール画面が起動します。
2インストールツール画面が表示されたら、[RC用パソコン対応ソフト日本語版]ボタンをクリックします。
アクション
インストールウィザードが起動します。
3[次へ(N)]ボタンをクリックします。
アクション
インストールの準備が始まります。

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p6
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
4ユーザー情報を入力した上で[次へ(N)]ボタンをクリックします。
5インストール先のフォルダを指定し、[次へ(N)]ボタンをクリックします。
6[インストール(I)]ボタンをクリックします。
アクション
インストールが開始されます。
7[プログラムの起動]項目のチェックを外し、[完了(F)]ボタンをクリックします。
チェックを外す
アクション
パソコン対応ソフトのインストールが完了しました。
※特に指定が無い場合は、インストール先フォルダを変更する必要はありません。

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p7
USBドライバーのインストールとオンライン接続PCONコントローラー/パソコンRCM-101-USB
用意するもの
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
CD-ROMを挿入した際に起動方法の確認画面が表示される場合は、“自動再生”を選択してく
ださい。フォルダーの中身が表示された場合は“IAI_Install”をダブルクリックで実行してください。POINT
1 パソコンのCDドライブにRCM-101-USB付属のCD-ROMを挿入します。
2インストールツール画面が表示されたら、[USB変換アダプタのドライバ]ボタンをクリックします。
アクション
インストールツール画面が起動します。
3[はい(Y)]ボタンをクリックします。
アクション
インストールウィザードが起動します。
USBドライバーのインストール手順はWindows Vista以降のWindows OSを対象に説明します。Windows XP以前のOSをお使いの場合には別冊のRCM-101-USB取扱説明書をご参照ください。
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p8
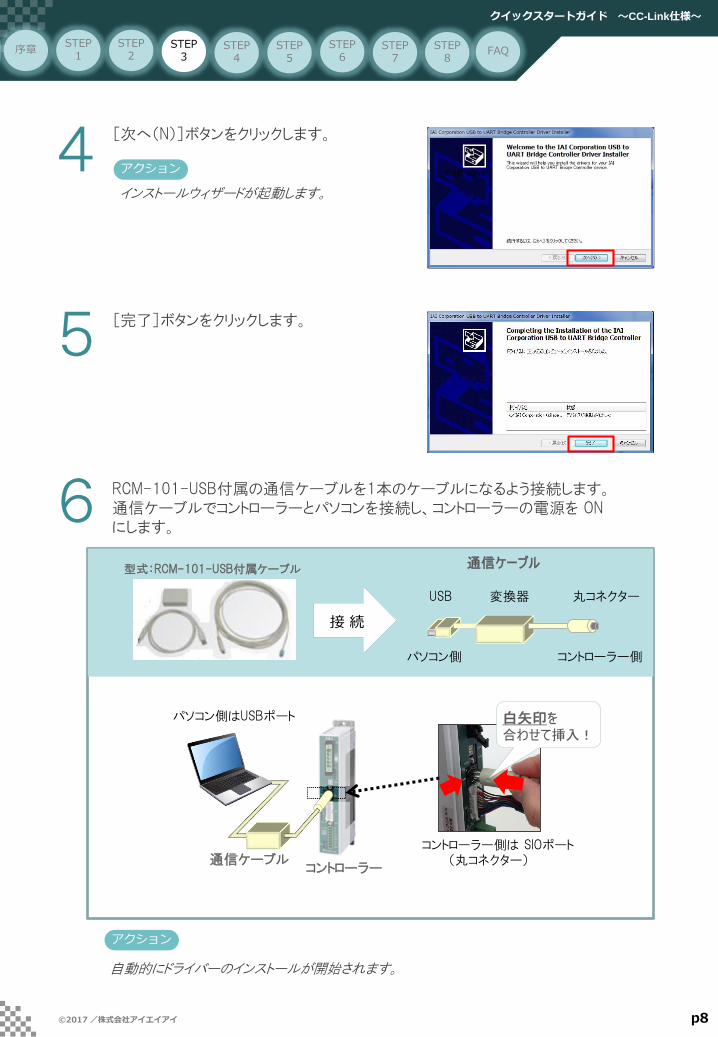
6
アクション
パソコン側はUSBポート
コントローラー側は SIOポート(丸コネクター)
型式:RCM-101-USB付属ケーブル
丸コネクターUSB
白矢印を合わせて挿入!
パソコン側 コントローラー側
変換器
通信ケーブル
コントローラー通信ケーブル
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
5[完了]ボタンをクリックします。
4[次へ(N)]ボタンをクリックします。
アクション
インストールウィザードが起動します。
RCM-101-USB付属の通信ケーブルを1本のケーブルになるよう接続します。通信ケーブルでコントローラーとパソコンを接続し、コントローラーの電源を ONにします。
接 続
自動的にドライバーのインストールが開始されます。

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p9
9接続軸チェックの画面が表示されます。青字で“接続”と表示されれば、接続に成功しています。
接続できない場合は
● 通信ポート(COMポート)の不一致● 通信ケーブルの断線● 通信ケーブルコネクタ接続不良● コントローラー側、パソコン側故障
の可能性があります。
まずは通信ケーブルの抜き差し及び、次頁補足1,2の確認を行ってください。
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
7
表示されているCOMポートを使用してコントローラーと通信します。通信設定を確認するときにCOM No.の情報が必要となりますので、メモしてください。
POINT
ドライバーが正常にインストールされているかデバイスマネージャーで確認します。
<デバイスマネージャーの開き方>[Windowsスタートメニュー] → [コントロールパネル] → [システム] → [デバイスマネージャー]
「ポート(COMとLPT)」項目に以下の名称が表示されていれば、インストールが正常に完了しています。
8 「パソコン対応ソフト」のショートカットをダブルクリックします。
アクション
パソコン対応ソフトが起動します。
COM №をメモします。(後ほど必要です。)
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p10
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
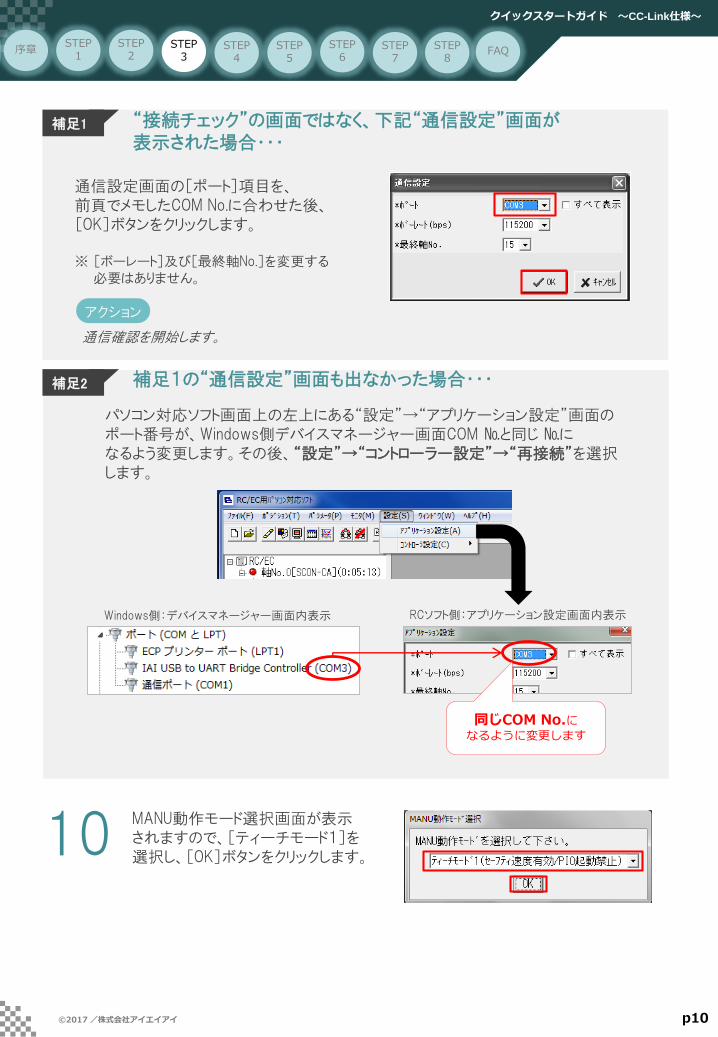
補足1 “接続チェック”の画面ではなく、下記“通信設定”画面が表示された場合・・・
通信設定画面の[ポート]項目を、前頁でメモしたCOM No.に合わせた後、[OK]ボタンをクリックします。
※ [ボーレート]及び[最終軸No.]を変更する必要はありません。
アクション
通信確認を開始します。
10MANU動作モード選択画面が表示されますので、[ティーチモード1]を選択し、[OK]ボタンをクリックします。
同じCOM No.になるように変更します
Windows側:デバイスマネージャー画面内表示 RCソフト側:アプリケーション設定画面内表示
補足2 補足1の“通信設定”画面も出なかった場合・・・
パソコン対応ソフト画面上の左上にある“設定”→“アプリケーション設定”画面のポート番号が、Windows側デバイスマネージャー画面COM №と同じ №になるよう変更します。その後、“設定”→“コントローラー設定”→“再接続”を選択します。

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p11
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
11 以下のようなメイン画面が表示され、パソコン対応ソフトの起動が完了します。
ツリービューが表示されない場合、コントローラーとパソコン対応ソフトが接続されていません。画面の左上にある “設定”→“コントローラー設定”→“再接続”を選択しても改善されない場合は
もう一度 p8の項目 6 の手順から再確認してください。
POINT★
★ ツリービュー

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p12
アクチュエーターを動かしてみよう
各機器の接続と通信の確立
STEP
4
コントローラー/アクチュエーター/パソコン通信ケーブル/モーターエンコーダーケーブル
用意する物
コントローラー
パソコン
通信ケーブル
アクチュエーター
モーターエンコーダーケーブルCB-***
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
1コントローラー、アクチュエーター、パソコンをそれぞれ接続し、パソコン対応ソフトを立上げます。下記画面が表示されているか確認します。
★ ツリービュー
ツリービューが表示されない場合、コントローラーとパソコン対応ソフトが接続されていません。画面の左上にある “設定”→“コントローラー設定”→“再接続”を選択しても改善されない場合は
もう一度 p8の項目 6 の手順から再確認してください。
POINT
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p13
アクチュエーターの試運転コントローラー/アクチュエーター/パソコン通信ケーブル/モーターエンコーダーケーブル
用意する物
ダブルクリック
MANU側へ倒す
NOM側へ倒す
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
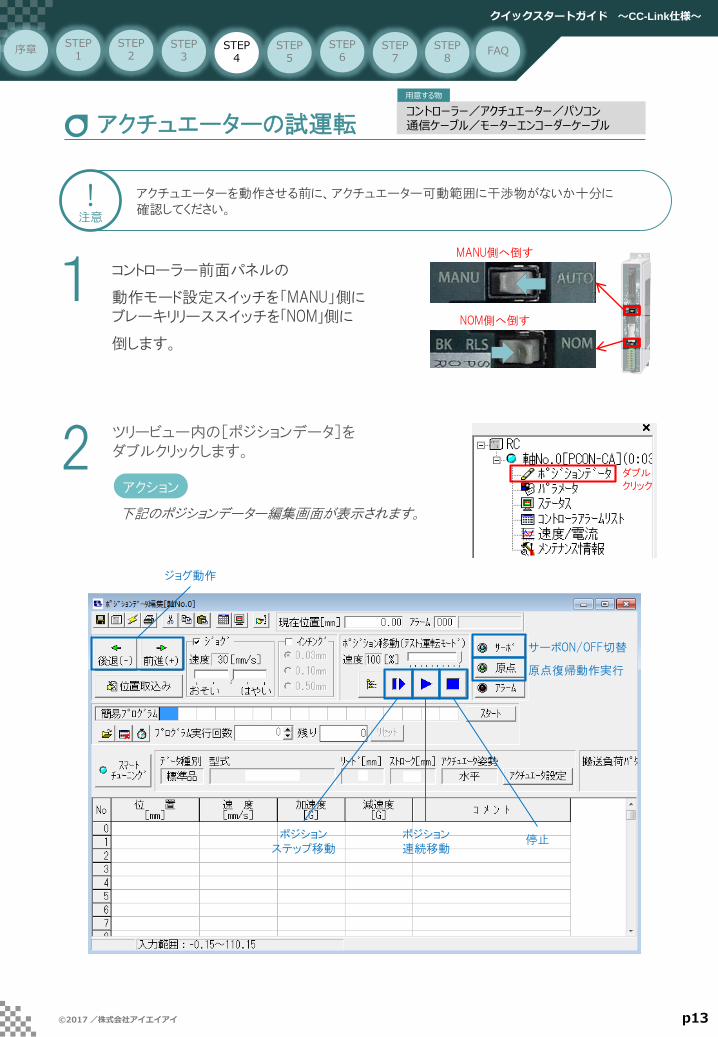
ツリービュー内の[ポジションデータ]をダブルクリックします。
アクション
下記のポジションデーター編集画面が表示されます。
1 コントローラー前面パネルの
動作モード設定スイッチを「MANU」側にブレーキリリーススイッチを「NOM」側に
倒します。
2
サーボON/OFF切替
原点復帰動作実行
停止ポジション連続移動
ポジションステップ移動
ジョグ動作
!注意
アクチュエーターを動作させる前に、アクチュエーター可動範囲に干渉物がないか十分に確認してください。

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p14
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
3 [サーボ]ボタンをクリックします。
アクション
モーターがサーボONし、サーボランプが水色に点灯します。
4 [原点]ボタンをクリックします。
アクション
アクチュエーターが原点復帰動作を開始し、原点ランプが緑色に点灯します。
5 [速度]目盛を任意の速度に合わせて[前進(+)]ボタンをクリックします。
アクション
アクチュエーターがプラス方向に動作します。
6 [速度]項目の目盛を任意の速度に合わせて[後退(-)]ボタンをクリックします。
アクション
アクチュエーターがマイナス方向に動作します。
サーボON/OFF切替
原点復帰動作
ジョグ動作(プラス方向)
ジョグ動作(マイナス方向)
水色点灯
サーボ ON サーボ OFF
緑点灯
原点復帰完了
原点復帰未完了
速度調整
速度調整
原点位置変更方法は p34、原点復帰方向を変更する方法は p36、原点復帰の信号入力を不要としたい場合は p38を参照してください。
POINT
原点復帰速度は変更できません。この速度を大きくしますと、アクチュエーター動作部がメカエンドに当たる際の衝撃が大きくなり、長期的にアクチュエーター機構に悪影響を及ぼすもしくは原点位置の誤差量が大きくなる等の可能性があります。
!注意

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p15
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
7 ポジションテーブルの『位置』にカーソルを合わせ、“入力範囲”に表示されている値の範囲で任意の座標値を登録します。サンプル画面ではNo.0に0mm、No.1に100mmを登録しています。
ポジション登録
位置を入力すると速度及び加速度、減速度の欄に初期値が自動入力されます。変更が必要な場合はそれぞれカーソルを移動させて数値を入力してください。入力範囲は画面下方に表示されます。
POINT
①入力したいポジションNo.の「位置」欄をクリック
②パソコンの数字キーから座標を入力し、[Enter]キーで確定
8 ポジションデーター編集画面の左上にある[コントローラーへ転送]アイコンをクリックします。
入力範囲 表示

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p16
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
確認画面が表示されますので、[OK]ボタンをクリックします。
10 転送が完了すると、入力した数値が赤字から黒字に替わります。
9

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p17
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
11 移動先のポジションNo.の「位置」欄をクリックして選択します。
ステップ移動
選択
12 「ポジション移動」欄の ボタンをクリックします。
アクション
選択したポジションへの移動を実行します。
13 連続移動を開始したいポジションNo.の「位置」欄をクリックで選択します。
連続移動
選択
14 「ポジション移動」欄の ボタンをクリックします。
アクション
選択したポジションから連続移動を開始します。
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p18
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
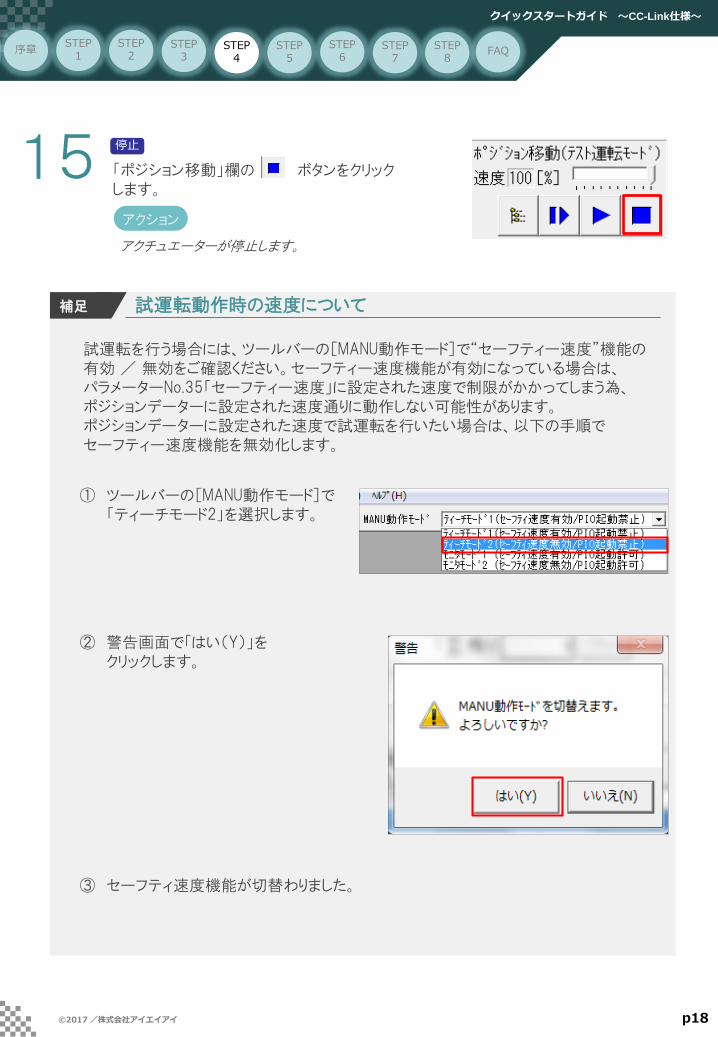
15 「ポジション移動」欄の ボタンをクリックします。
アクション
アクチュエーターが停止します。
停止
補足
試運転を行う場合には、ツールバーの[MANU動作モード]で“セーフティー速度”機能の有効 / 無効をご確認ください。セーフティー速度機能が有効になっている場合は、パラメーターNo.35「セーフティー速度」に設定された速度で制限がかかってしまう為、ポジションデーターに設定された速度通りに動作しない可能性があります。ポジションデーターに設定された速度で試運転を行いたい場合は、以下の手順でセーフティー速度機能を無効化します。
① ツールバーの[MANU動作モード]で「ティーチモード2」を選択します。
② 警告画面で「はい(Y)」をクリックします。
③ セーフティ速度機能が切替わりました。
試運転動作時の速度について
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ
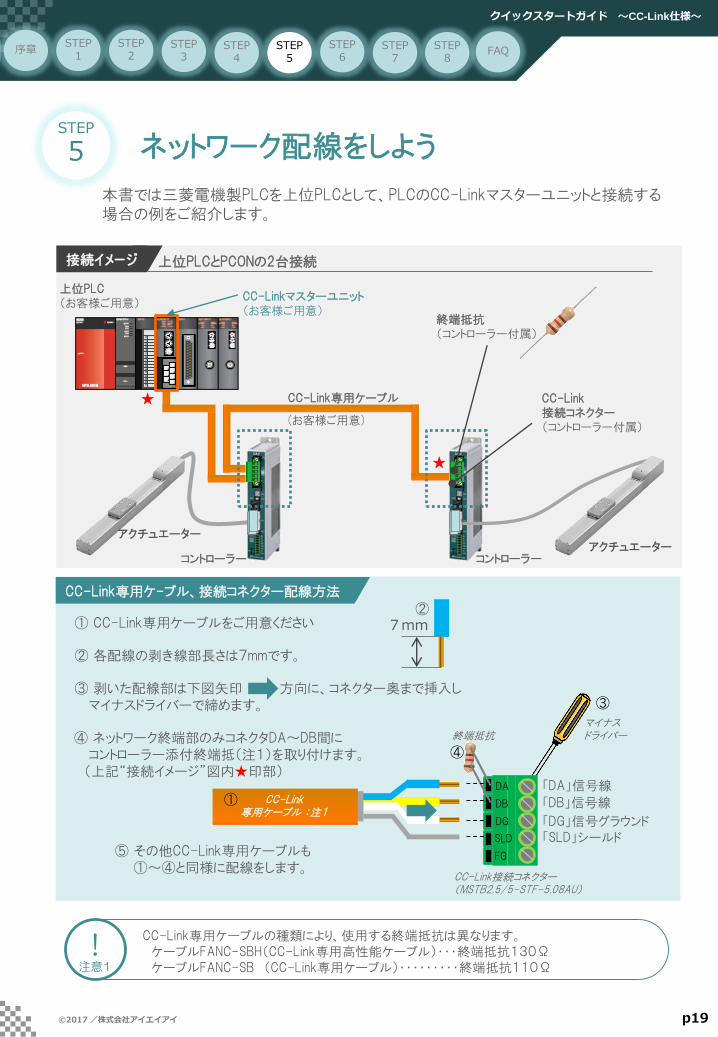
接続イメージ 上位PLCとPCONの2台接続
p19
ネットワーク配線をしようSTEP
5
本書では三菱電機製PLCを上位PLCとして、PLCのCC-Linkマスターユニットと接続する場合の例をご紹介します。
① CC-Link専用ケーブルをご用意ください
② 各配線の剥き線部長さは7mmです。
③ 剥いた配線部は下図矢印 方向に、コネクター奥まで挿入しマイナスドライバーで締めます。
④ ネットワーク終端部のみコネクタDA~DB間にコントローラー添付終端抵(注1)を取り付けます。(上記“接続イメージ”図内★印部)
CC-Link専用ケ-ブル、接続コネクター配線方法
7mm
終端抵抗
⑤ その他CC-Link専用ケーブルも①~④と同様に配線をします。
③
④
②
マイナスドライバー
「DA」信号線
「DB」信号線
「DG」信号グラウンド「SLD」シールド
CC-Link接続コネクター(MSTB2.5/5-STF-5.08AU)
DA
DB
DG
SLD
FG
CC-Link専用ケーブル :注1
①
CC-Link専用ケーブルの種類により、使用する終端抵抗は異なります。ケーブルFANC-SBH(CC-Link専用高性能ケーブル)・・・終端抵抗130ΩケーブルFANC-SB (CC-Link専用ケーブル)・・・・・・・・・終端抵抗110Ω
!注意1
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
CC-Link専用ケーブル
(お客様ご用意)
CC-Linkマスターユニット(お客様ご用意)
コントローラー
CC-Link接続コネクター(コントローラー付属)
★
★
終端抵抗(コントローラー付属)
上位PLC(お客様ご用意)
アクチュエーターコントローラー
アクチュエーター

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p20
コントローラー側のネットワーク設定をしようSTEP
6
CC-Linkマスターユニット
コントローラー
パソコン対応ソフトを用いて、コントローラー側の設定を行います。
CC-Link専用ケーブル
IAI製RC/ECパソコン対応ソフトRCM-101-***
RCM-101-***付属ケーブル
補足 P/A/DCON CC-Link接続オプション仕様各コントローラーに内蔵されたCC-Link接続オプション基板仕様は以下の通りです。
項 目 仕 様
通信規格 CC-Link Ver1.10
通信速度[Mbps] 10 / 4 / 2.5 / 0.625 / 0.156
占有局数
リモートデバイス局(1局~4局)
パラメータ№ 84「フィールドネットワーク動作モード」選択により占有局数は1局~4局に変化します。
詳しくは次ページをご覧ください。
CC-Link通信ケーブル長
通信速度[Mbps]
10 5 2.5 0.625 0.156
総ケーブル長[m]
100 160 400 900 1200
接続イメージ
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
PLC配線・プログラミング担当者向け
コントローラー

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p21
フィールドバス動作モード
1 パラメーターNo.84「フィールドバス動作モード」の設定値により、上位からの制御方法を以下5種類から選択します。
設定値 【 0 】 リモートI/Oモード
設定値 【 1 】 ポジション/簡易直値モード 設定値 【 2 】 ハーフ直値モード
設定値 【 3 】 フル直値モード 設定値 【 4 】 リモートI/Oモード2
コントローラーに予めポジションデーター[位置以外の速度・加減速度、押付力等]を登録し、ポジション№を上位から指定して、目標位置はその都度、上位PLCより数値指定するモードです。
目標位置、速度、加減速度、押付力を上位PLCより都度、直接数値指定するモードです。
下記図の全ての値を上位PLCより都度数値指定するモードです。
CC-Linkマスタユニット
目標位置:100mm位置決め幅:0.10mm速度指定:100mm
加速度:0.3G減速度:0.3G
押付力:50%負荷電流閾値:20%
ゾーン+:50mmゾーンー:30mm
基本的には、リモートI/Oモードと同じです。異なる部分は上位PLCへの出力として「現在位置」、「電流値」2つの数値出力ができます。
入力
ポジションNo.0
I/O入出力ユニットコントローラーPIO仕様
PIO
入力
コントローラーCC-Link仕様
CC-Linkマスターユニット
ポジションNo.0
コントローラーCC-Link仕様
入力
CC-Linkマスターユニット
目標位置:100mm位置決め幅:0.10mm速度指定:100mm加減速度:0.3G押付力:50%
入力
コントローラーCC-Link仕様
目標位置:100mm+
ポジションNo.0
CC-Linkマスターユニット
入力
コントローラーCC-Link仕様
CC-Linkマスタユニット
入力
ポジションNo.0
コントローラーCC-Link仕様
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
予め、コントローラーにポジションデーターを登録し、ポジションNo.を上位から指定して目標のポジションへ
移動させるモードです。上位との通信方式はCC-Linkですが、その通信内容はPIOと全く同じです。
上位からの制御方法はPIOと全く同じ

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p22
項目 1 では上位PLCからコントローラーを制御する入力側のみの紹介をしていますが、
各モードともに上位PLCへ出力する事も可能です。但し、リモートI/Oモードは、現在位置等の数値データー出力はありません。
!注意
動作モード
機能リモート
I/Oモードポジション/
簡易直値モードハーフ
直値モードフル
直値モードリモート
I/Oモード 2
位置決め点数 512 点 768 点 制限なし 制限なし 512 点
位置データ直接指定運転
× ○ ○ ○ ×
速度・加速度直接指定
× × ○ ○ ×
押付け動作 ○ ○ ○ ○ ○
現在位置 読取り × ○ ○ ○ ○
現在速度 読取り × × ○ ○ ×
ポジションNo.指定運転
○ ○ × × ○
完了ポジションNo.読取り
○ ○ × × ○
パラメーターNo.84設定値 0 1 2 3 4
CC-Linkマスター占有局数
1局 1局 2局 4局 1局
2 パラメーターNo.84に、項目1 で選択した動作モード設定値を下記手順で
コントローラに入力してください。
【パソコン対応ソフト】
①パラメーター(P)をクリック
②編集(E)をクリック
③パラメーター№84を選択
④設定値を入力
⑤コントローラー再起動
【動作モード別機能一覧】
項目 3 のパラメーター設定方法も上記手順で行ってください。POINT
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p23
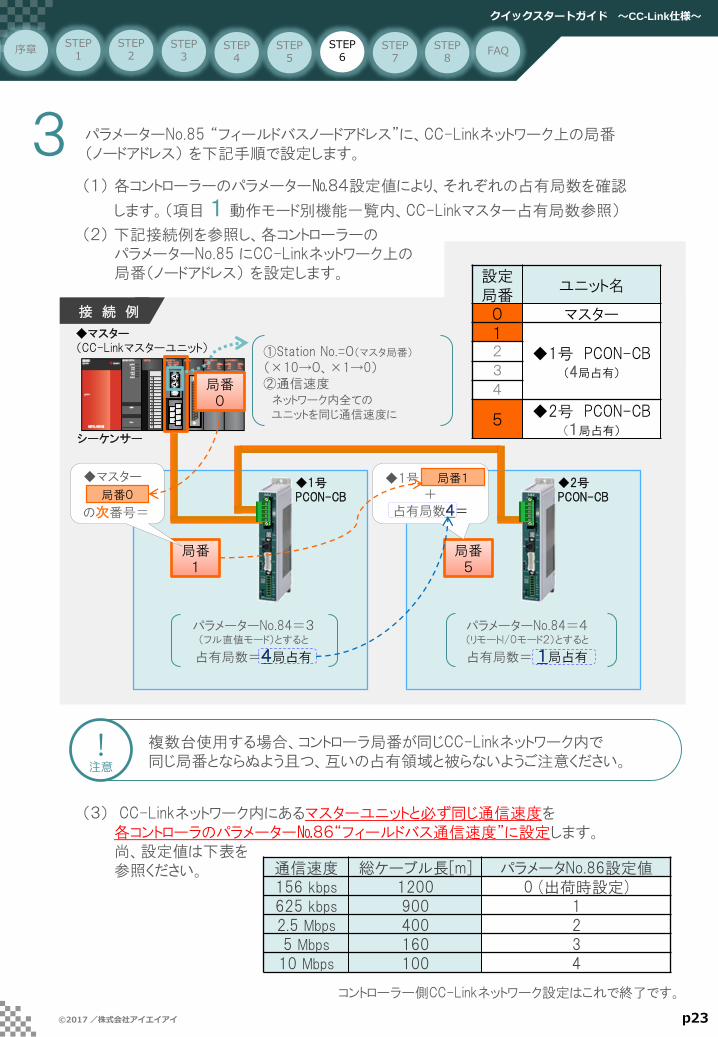
3 パラメーターNo.85 “フィールドバスノードアドレス”に、CC-Linkネットワーク上の局番(ノードアドレス) を下記手順で設定します。
!注意
複数台使用する場合、コントローラ局番が同じCC-Linkネットワーク内で同じ局番とならぬよう且つ、互いの占有領域と被らないようご注意ください。
◆2号PCON-CB
局番1
局番5
(1) 各コントローラーのパラメーター№84設定値により、それぞれの占有局数を確認
します。(項目 1 動作モード別機能一覧内、CC-Linkマスター占有局数参照)
パラメーターNo.84=3(フル直値モード)とすると
占有局数=4局占有
パラメーターNo.84=4(リモートI/Oモード2)とすると
占有局数= 1局占有
◆マスター
の次番号=
◆1号+
占有局数4=
接 続 例
(2) 下記接続例を参照し、各コントローラーのパラメーターNo.85 にCC-Linkネットワーク上の局番(ノードアドレス) を設定します。
(3) CC-Linkネットワーク内にあるマスターユニットと必ず同じ通信速度を各コントローラのパラメーター№86“フィールドバス通信速度”に設定します。尚、設定値は下表を参照ください。 通信速度 総ケーブル長[m] パラメータNo.86設定値
156 kbps 1200 0 (出荷時設定)625 kbps 900 12.5 Mbps 400 25 Mbps 160 310 Mbps 100 4
◆1号PCON-CB
設定局番
ユニット名
0 マスター1
◆1号 PCON-CB(4局占有)
2
3
4
5◆2号 PCON-CB
(1局占有)
◆マスター(CC-Linkマスターユニット)
局番1
局番0
局番0
コントローラー側CC-Linkネットワーク設定はこれで終了です。
シーケンサー
①Station No.=0(マスタ局番)
(×10→0、×1→0)②通信速度
ネットワーク内全てのユニットを同じ通信速度に
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p24
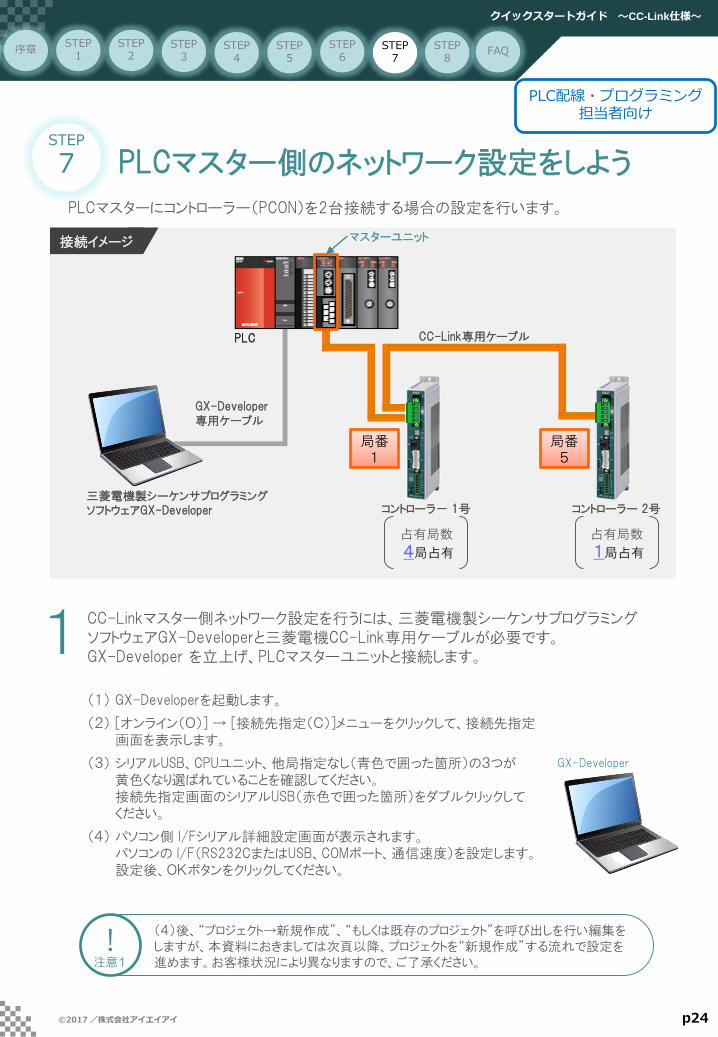
PLCマスター側のネットワーク設定をしようSTEP
7
マスターユニット
CC-Link専用ケーブル
三菱電機製シーケンサプログラミングソフトウェアGX-Developer
GX-Developer専用ケーブル
接続イメージ
CC-Linkマスター側ネットワーク設定を行うには、三菱電機製シーケンサプログラミングソフトウェアGX-Developerと三菱電機CC-Link専用ケーブルが必要です。GX-Developer を立上げ、PLCマスターユニットと接続します。1
コントローラ- 1号
占有局数
4局占有
コントローラー 2号
占有局数
1局占有
局番1
局番5
PLC
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
(1) GX-Developerを起動します。
(2) [オンライン(O)] → [接続先指定(C)]メニューをクリックして、接続先指定画面を表示します。
(3) シリアルUSB、CPUユニット、他局指定なし(青色で囲った箇所)の3つが黄色くなり選ばれていることを確認してください。接続先指定画面のシリアルUSB(赤色で囲った箇所)をダブルクリックしてください。
(4) パソコン側 I/Fシリアル詳細設定画面が表示されます。パソコンの I/F(RS232CまたはUSB、COMポート、通信速度)を設定します。設定後、OKボタンをクリックしてください。
!注意1
(4)後、“プロジェクト→新規作成”、“もしくは既存のプロジェクト”を呼び出しを行い編集をしますが、本資料におきましては次頁以降、プロジェクトを“新規作成”する流れで設定を進めます。お客様状況により異なりますので、ご了承ください。
GX-Developer
PLC配線・プログラミング担当者向け
PLCマスターにコントローラー(PCON)を2台接続する場合の設定を行います。
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p25
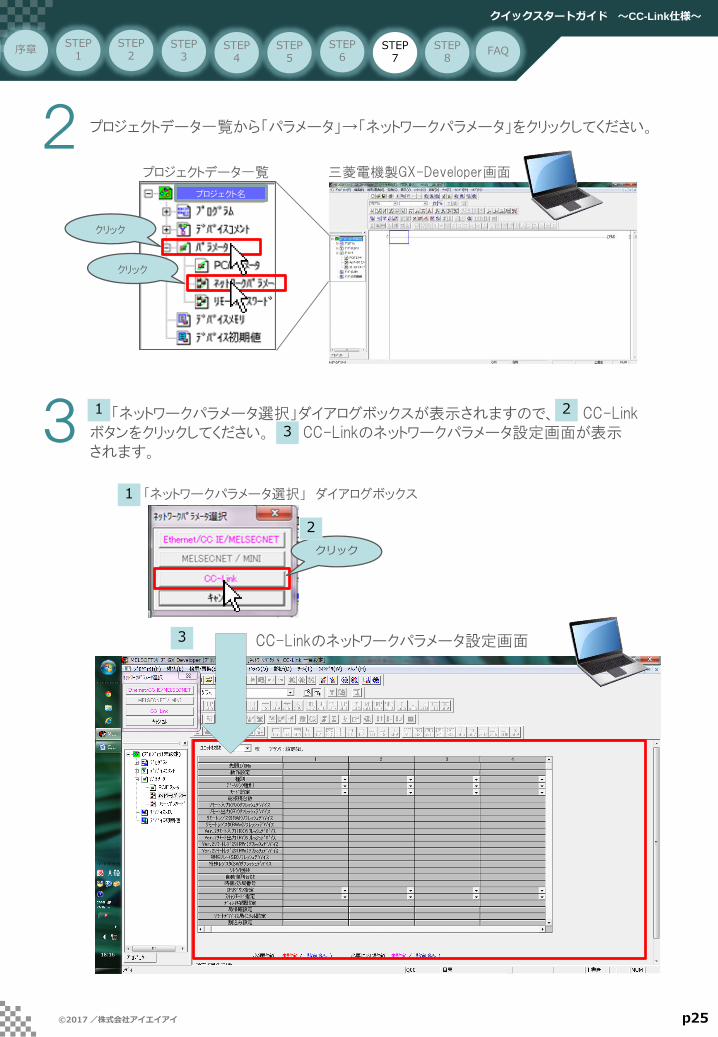
2 プロジェクトデータ一覧から「パラメータ」→「ネットワークパラメータ」をクリックしてください。
プロジェクト名
プロジェクトデータ一覧 三菱電機製GX-Developer画面
3 「ネットワークパラメータ選択」ダイアログボックスが表示されますので、 CC-Link ボタンをクリックしてください。 CC-Linkのネットワークパラメータ設定画面が表示されます。
「ネットワークパラメータ選択」 ダイアログボックス
CC-Linkのネットワークパラメータ設定画面
クリック
クリック
クリック
1
1
2
3
2
3
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p26
4 CC-Linkのネットワークパラメータ設定画面内の“ユニット枚数”を入力します。本資料では以下の様な図のシーケンサーユニット構成となりますのでユニット枚数(接続済のマスターユニット台数)は1枚と設定します。
マスターユニット接続イメージ
事例のシーケンサにはマスターユニットが1枚
接続されています
CC-Linkのネットワークパラメータ設定画面
ユニット枚数(マスターユニットの数)を1
枚に設定
5
!注意2
スレーブ局が64台以下の場合は、マスター局は1枚必要です。
スレーブ局が65~128台の場合は、マスター局は2枚必要です。
シーケンサー
CC-Linkのネットワークパラメータ設定画面内の
“モード設定”が“リモートネット-Ver.1モード”注1が選択されているか確認します。
下記接続例では、マスターに接続されているユニットは2台ですので2を入力します。
CC-Linkのネットワークパラメータ設定画面
モード設定
接続イメージ
総接続台数
マスターユニット
2
1
2
2
1
1
1
2
マスターに接続している
ユニット=2台
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
!注意1
P/A/DCONのCC-Linkユニットは、Ver1モードで動作します。
2
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p27
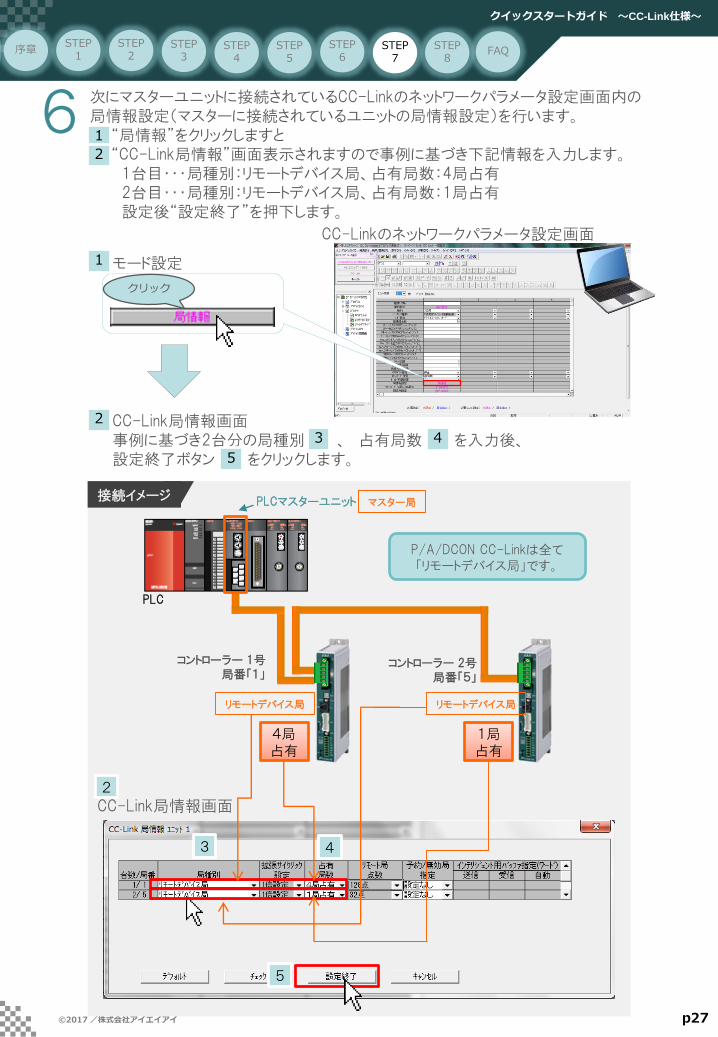
6次にマスターユニットに接続されているCC-Linkのネットワークパラメータ設定画面内の局情報設定(マスターに接続されているユニットの局情報設定)を行います。
“局情報”をクリックしますと“CC-Link局情報”画面表示されますので事例に基づき下記情報を入力します。
1台目・・・局種別:リモートデバイス局、占有局数:4局占有2台目・・・局種別:リモートデバイス局、占有局数:1局占有設定後“設定終了”を押下します。
CC-Linkのネットワークパラメータ設定画面
モード設定
PLCマスターユニット
コントローラー 1号局番「1」
接続イメージ
コントローラー 2号局番「5」
4局占有
PLC
CC-Link局情報画面事例に基づき2台分の局種別 、 占有局数 を入力後、設定終了ボタン をクリックします。
クリック
1
2
1
2
リモートデバイス局 リモートデバイス局
1局占有
マスター局
P/A/DCON CC-Linkは全て「リモートデバイス局」です。
CC-Link局情報画面2
3 4
5
3 4
5
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p28
7 次にマスターユニットに接続されている各ユニットに割付けられる 「I/Oの先頭№」を設定します。
お客様の状況に合わせ、設定をお願いします。今回の事例では、下記 のように設定します。
リモート入力(RX)リフレッシュデバイス X100リモート出力(RY)リフレッシュデバイス Y100
リモートレジスタ(RWr) リフレッシュデバイス D200リモートレジスタ(RWw) リフレッシュデバイス D100
CC-Linkのネットワークパラメータ設定画面
CC-Linkネットワーク設定は以上で終了です。
8 最後に、設定したネットワークパラメーターをPLCに書き込み(保存)してください
(1) [オンライン(O)]→[PC書込み(W)]メニューをクリックして、PC書込み画面を表示します。
(2) PC書込み画面でパラメータ + プログラムボタンをクリックして、プログラムの「MANU」とパラメータの「PC/ネットワーク」を選択し、実行ボタンをクリックします。
(3) 「編集中のネットワークパラメータがあります。編集中のネットワークパラメータを破棄し、ウィンドウを閉じますか?」とメッセージが表示されるので、はい(Y)ボタンをクリックします。
(4) 「パラメータは既に存在します。上書きしてよろしいでしょうか?」とメッセージが表示されるので、はい(Y)ボタンをクリックします。
(5) 「リモートSTOP後、PC書込みを実行しますか?」とメッセージが表示される場合があります。表示された場合は、はい(Y)ボタンをクリックします。
(6) パラメータの書込みが完了すると、「完了しました。」のメッセージが表示されます。OKボタンをクリックしてください。これで、PLCの設定は完了です。必要に応じて、プロジェクトの保存を行います。
!注意
GX-Developerは三菱電機様製品です。使用方法に関しましては三菱電機様取扱説明書、HPに従ってください。
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
下記説明は、1つの事例に基づく内容です。誤ってお客様の大切なデータが削除されぬよう十分ご注意ください。
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p29
PLCマスターユニット
コントローラー 1号局番「1」
接続イメージ
4局占有
PLC
リモートデバイス局 リモートデバイス局
1局占有
マスター局
デバイス +FEDC+BA98+7654+3210Y100 ○○○○ ○○○○ ○○○○ ○○○○Y110 ○○○○ ○○○○ ○○○○ ○○○○Y120 ○○○○ ○○○○ ○○○○ ○○○○Y130 ○○○○ ○○○○ ○○○○ ○○○○Y140 ○○○○ ○○○○ ○○○○ ○○○○Y150 ○○○○ ○○○○ ○○○○ ○○○○Y160 ○○○○ ○○○○ ○○○○ ○○○○Y170 ○○○○ ○○○○ ○○○○ ○○○○Y180 ○○○○ ○○○○ ○○○○ ○○○○Y190 ○○○○ ○○○○ ○○○○ ○○○○Y1A0
:○○○○ ○○○○ ○○○○ ○○○○: : : :
デバイス +FEDC+BA98+7654+3210X100 ○○○○ ○○○○ ○○○○ ○○○○X110 ○○○○ ○○○○ ○○○○ ○○○○X120 ○○○○ ○○○○ ○○○○ ○○○○X130 ○○○○ ○○○○ ○○○○ ○○○○X140 ○○○○ ○○○○ ○○○○ ○○○○X150 ○○○○ ○○○○ ○○○○ ○○○○X160 ○○○○ ○○○○ ○○○○ ○○○○X170 ○○○○ ○○○○ ○○○○ ○○○○X180 ○○○○ ○○○○ ○○○○ ○○○○X190 ○○○○ ○○○○ ○○○○ ○○○○X1A0
:○○○○ ○○○○ ○○○○ ○○○○: : : :
デバイス +FEDC+BA98+7654+3210D100 ○○○○ ○○○○ ○○○○ ○○○○D101 ○○○○ ○○○○ ○○○○ ○○○○D102
:○○○○ ○○○○ ○○○○ ○○○○
: : : :D10C ○○○○ ○○○○ ○○○○ ○○○○D10E ○○○○ ○○○○ ○○○○ ○○○○D10F ○○○○ ○○○○ ○○○○ ○○○○D110 ○○○○ ○○○○ ○○○○ ○○○○D111 ○○○○ ○○○○ ○○○○ ○○○○D112 ○○○○ ○○○○ ○○○○ ○○○○D113 ○○○○ ○○○○ ○○○○ ○○○○D114
:○○○○ ○○○○ ○○○○ ○○○○
: : : :
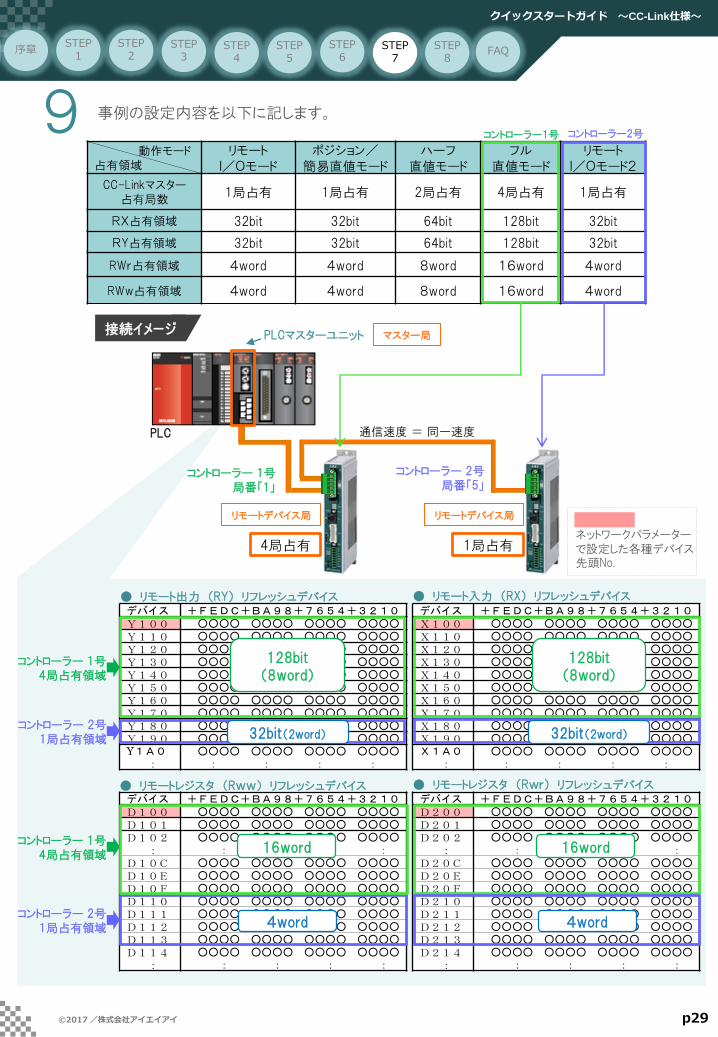
動作モード占有領域
リモートI/Oモード
ポジション/簡易直値モード
ハーフ直値モード
フル直値モード
リモートI/Oモード2
CC-Linkマスター占有局数
1局占有 1局占有 2局占有 4局占有 1局占有
RX占有領域 32bit 32bit 64bit 128bit 32bit
RY占有領域 32bit 32bit 64bit 128bit 32bit
RWr占有領域 4word 4word 8word 16word 4word
RWw占有領域 4word 4word 8word 16word 4word
事例の設定内容を以下に記します。9 コントローラー1号 コントローラー2号
コントローラー 2号局番「5」
● リモートレジスタ (Rww) リフレッシュデバイス
● リモート出力 (RY) リフレッシュデバイス ● リモート入力 (RX) リフレッシュデバイス
● リモートレジスタ (Rwr) リフレッシュデバイスデバイス +FEDC+BA98+7654+3210D200 ○○○○ ○○○○ ○○○○ ○○○○D201 ○○○○ ○○○○ ○○○○ ○○○○D202
:○○○○ ○○○○ ○○○○ ○○○○
: : : :D20C ○○○○ ○○○○ ○○○○ ○○○○D20E ○○○○ ○○○○ ○○○○ ○○○○D20F ○○○○ ○○○○ ○○○○ ○○○○D210 ○○○○ ○○○○ ○○○○ ○○○○D211 ○○○○ ○○○○ ○○○○ ○○○○D212 ○○○○ ○○○○ ○○○○ ○○○○D213 ○○○○ ○○○○ ○○○○ ○○○○D214
:○○○○ ○○○○ ○○○○ ○○○○: : : :
コントローラー 1号4局占有領域
コントローラー 2号1局占有領域
ネットワークパラメーターで設定した各種デバイス先頭No.
コントローラー 1号4局占有領域
コントローラー 2号1局占有領域
128bit(8word)
128bit(8word)
16word
4word 4word
16word
32bit(2word)32bit(2word)
通信速度 = 同一速度
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ
Y180(シーケンサ側) ● ○ ○ ● ● ○ ○ ○ ○ ○ ○ ○ ○ ○ ○ ○
入力信号(コントローラ2号側) S
O
N
R
E
S
C
S
T
R
*S
T
P
H
O
M
E
R
M
O
D
B
K
R
L
― ― ―
P
C
32
P
C
16
P
C
8
P
C
4
P
C
2
P
C
1
サーボO
N
リセット
スタート
一時停止
原点復帰
運転モード
ブレーキ
解除
使用不可
指令ポジションNo.
p30
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
CC-Linkネットワーク接続確認をしようSTEP
8
① GX-Developerを用いてシーケンサーからコントローラ2号に対しサーボON信号ならびに原点復帰信号を送り、
② アクチュエータ2号がサーボON → 原点復帰動作することで、PLCとコントローラが接続したことを確認します。
PLCマスターユニット
コントローラ2号
三菱電機製シーケンサプログラミングソフトウェアGX-Developer
GX-Developer専用ケーブル
PLC
サーボ ON
アクチュエータ2号
デバイス +FEDC+BA98+7654+3210Y100 ○○○○ ○○○○ ○○○○ ○○○○Y110 ○○○○ ○○○○ ○○○○ ○○○○Y120 ○○○○ ○○○○ ○○○○ ○○○○Y130 ○○○○ ○○○○ ○○○○ ○○○○Y140 ○○○○ ○○○○ ○○○○ ○○○○Y150 ○○○○ ○○○○ ○○○○ ○○○○Y160 ○○○○ ○○○○ ○○○○ ○○○○Y170 ○○○○ ○○○○ ○○○○ ○○○○Y180 ●○○● ●○○○ ○○○○ ○○○○Y190 ○○○○ ○○○○ ○○○○ ○○○○Y1A0
:○○○○ ○○○○ ○○○○ ○○○○: : : :
● リモート出力 (RY) リフレッシュデバイス
コントローラー 1号4局占有領域
コントローラー 2号1局占有領域
サーボ ON
リモート I/Oモード 2(パラメータNo.84 = 4)
出力CC-LinkマスターデバイスY180よりコントローラ2号へ出力
サーボON
①
① ②
②
原点復帰動作開始
原点復帰原点復帰
一時停止解除
PLC配線・プログラミング担当者向け

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p31
1 1
三菱電機製GX-Developer画面
2 3
クリック
クリック
クリック
2
三菱電機製GX-Developer デバイス一括モニタ-3 画面
1 Y180
Y180
Y180入力
1
[オンライン(O)]→ [モニタ(M)]→ [デバイス一括(Z)]メニューをクリックします。
「デバイス」にサーボON、原点復帰指令bitを含むデバイス“Y180”を入力します。「モニタ開始」クリック→ 各デバイスが表示されているエリアをクリックします。[デバイステスト]のデバイスに、強制ONさせたいY18F(サーボON)を入力 後「強制ON」をクリックし、次に強制ONさせたいY18C(一時停止解除)を入力 し同様に「強制ON」をクリック、 最後にY18B(原点復帰)を 入力後同様に強制ONさせ、結果としてアクチュエータ2号が原点復帰動作(原点側に向かって可動部がゆっくりと動作開始)を行えば、テスト完了です。
クリック
クリック
2 3
5
デバイス№入力
クリック
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
1
2
3
4
5
1
2
3
モニタ開始
!注意1
原点復帰動作が行われない場合には、実際の設定(デバイスの割付)とデバイステストした内容が一致していない可能性があります。STEP6~8をもう一度内容確認してください。
5 4
4
4

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p32
よくある質問FAQ
コントローラー消費電流を教えてください。Q1
A1
アクチュエーター型式 消費電流(最大)
「シリーズ」 「モーター種類」PCON-
CA/CB/CGB
PCON-
CFA/ CFB /CGFB
消費電流
(モーター側
+制御側)
RCP2/
RCP3
20P、28P、28SP 2.0 A
35P、42P、56P 2.2 A
60P、86P 6.0 A
RCP4/
RCP5/
RCP6
28P、35P、42P、56P
高出力設定“無効”時
2.2 A
高出力設定“有効”時
4.2 A
60P、86P 6.0 A
コントローラー型式「タイプ」、アクチュエータ―型式の「シリーズ」、「モーター種類」、を確認してください。
消費電流の確認
例) コントローラー型式 PCON-CFB-60PWAI-NP-5-0
アクチュエーター型式 RCP6-WRA16C-WA-60P-10-100-P4-M
コントローラー型式/アクチュエーター型式によって消費電流は異なります。下表を確認してください。
1
2
1
消費電力
(1) PCON-CA/CB/CGB/CFA/CFB/CFGB
コントローラーの消費電流を確認してください。( 例)の消費電流は6.0Aです。)
!注意
上記消費電流には、コントローラー制御側電流、モーター側電流、ブレーキ用(ブレーキ付きアクチュエーター使用時のみ)電流を含みます。
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p33
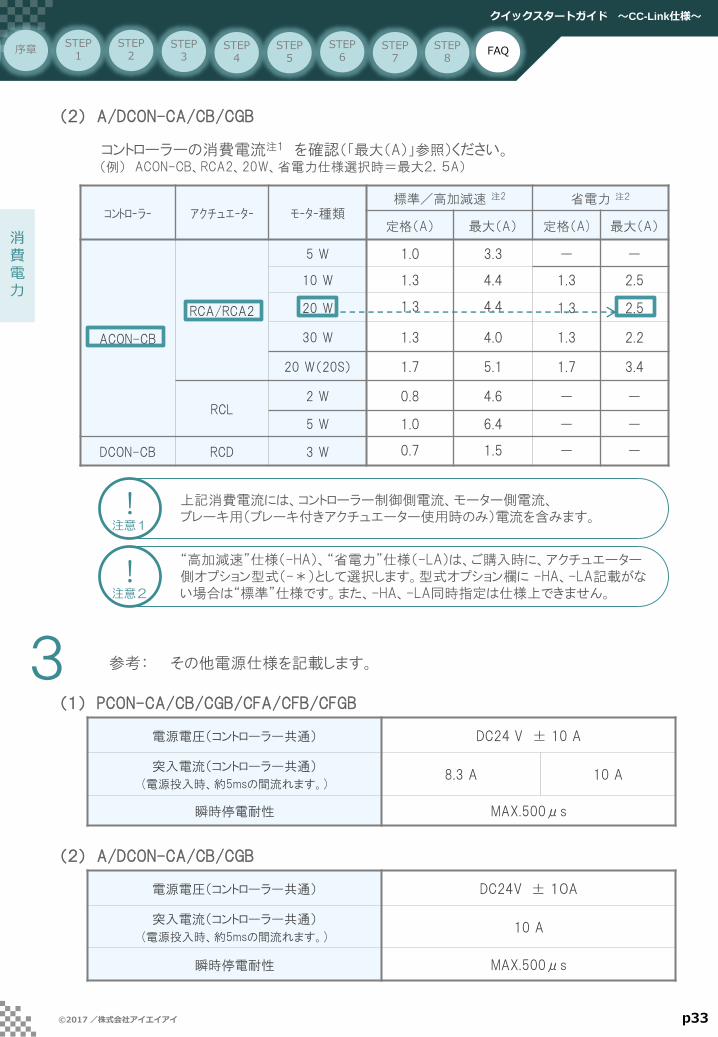
コントローラー アクチュエーター モーター種類標準/高加減速 注2 省電力 注2
定格(A) 最大(A) 定格(A) 最大(A)
ACON-CB
RCA/RCA2
5 W 1.0 3.3 - -
10 W 1.3 4.4 1.3 2.5
20 W 1.3 4.4 1.3 2.5
30 W 1.3 4.0 1.3 2.2
20 W(20S) 1.7 5.1 1.7 3.4
RCL2 W 0.8 4.6 - -
5 W 1.0 6.4 - -
DCON-CB RCD 3 W 0.7 1.5 - -
コントローラーの消費電流注1 を確認(「最大(A)」参照)ください。(例) ACON-CB、RCA2、20W、省電力仕様選択時=最大2.5A)
3
消費電力
電源電圧(コントローラー共通) DC24 V ± 10 A
突入電流(コントローラー共通)
(電源投入時、約5msの間流れます。)8.3 A 10 A
瞬時停電耐性 MAX.500μs
参考: その他電源仕様を記載します。
(2) A/DCON-CA/CB/CGB
(1) PCON-CA/CB/CGB/CFA/CFB/CFGB
(2) A/DCON-CA/CB/CGB
電源電圧(コントローラー共通) DC24V ± 10A
突入電流(コントローラー共通)
(電源投入時、約5msの間流れます。)10 A
瞬時停電耐性 MAX.500μs
!注意1
上記消費電流には、コントローラー制御側電流、モーター側電流、ブレーキ用(ブレーキ付きアクチュエーター使用時のみ)電流を含みます。
!注意2
“高加減速”仕様(-HA)、“省電力”仕様(-LA)は、ご購入時に、アクチュエーター側オプション型式(-*)として選択します。型式オプション欄に -HA、-LA記載がない場合は“標準”仕様です。また、-HA、-LA同時指定は仕様上できません。
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ
原点の位置変更方法を教えてください。Q2
A2 “パラメーター№22 原点オフセット移動量(mm)”を変更する事によりアクチュエーター原点位置を変更できます。
p34
ME(メカエンド)原点
★
SE(ストロークエンド)
有効ストローク
ME
パラメーターNo.22原点オフセット移動量(mm)設定値
!注意
原点復帰オフセット量は、工場出荷時初期値よりも小さな値を可能な限り設定しないでください。アクチュエーターモーターがサーボON時、正常に励磁検出が行えず「0B8励磁検出エラー」が発生する、通常移動時メカエンドに動作部が衝突する等、トラブル発生要因となります。
原点復帰
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
1 原点復帰動作を実行します。 (p14 の手順 4 )
2 現在の原点位置から、変更したい位置までの“距離”を確認します。
【調整の手順】
元々“パラメーター №22 原点復帰オフセット移動量”に設定されていた値に
手順 2 で確認した“距離”を加えた値を入力します。
(弊社ティーチングボックスまたは、パソコン対応ソフト入力手順は下記を参照してください。)3
① パラメーター(P) をクリック② 編集(E) をクリック③ パラメーター №22 を選択④ 設定値(mm)を入力⑤ コントローラー再起動
① メニュー1② パラメーター編集画面を選択③ パラメーター№22 を選択④ 設定値 (mm) を入力⑤ コントローラ再起動
【TB-02】 【パソコン対応ソフト】
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p35
4
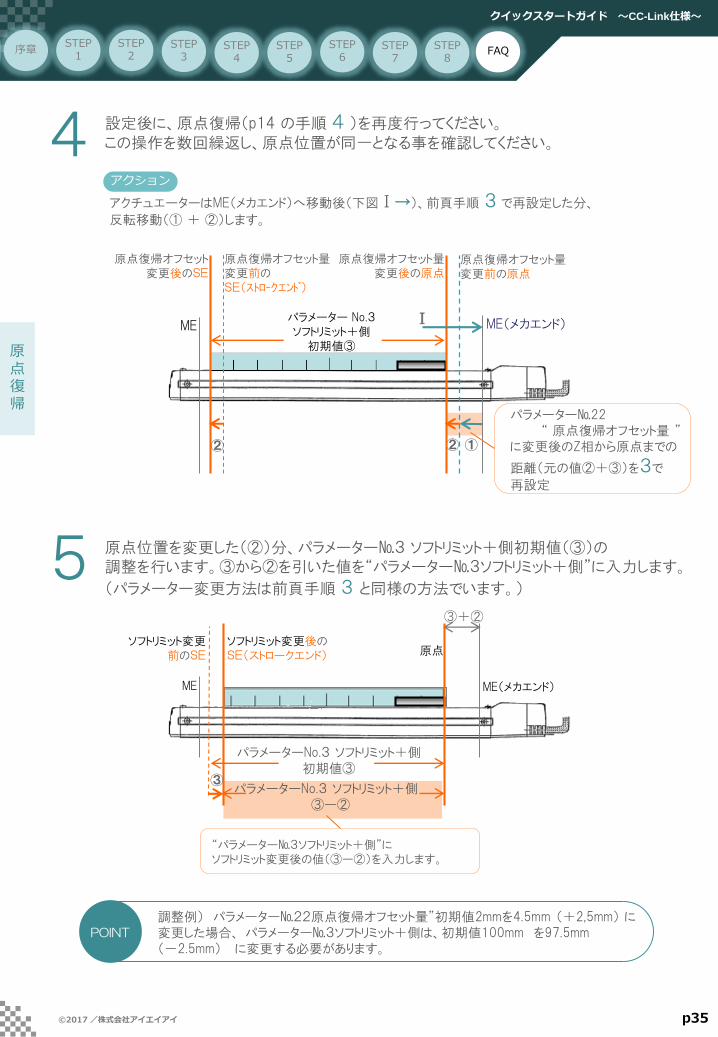
調整例) パラメーター№22原点復帰オフセット量”初期値2mmを4.5mm (+2,5mm) に変更した場合、 パラメーター№3ソフトリミット+側は、初期値100mm を97.5mm(-2.5mm) に変更する必要があります。
POINT
原点復帰
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
設定後に、原点復帰(p14 の手順 4 )を再度行ってください。この操作を数回繰返し、原点位置が同一となる事を確認してください。
ME
5 原点位置を変更した(②)分、パラメーター№3 ソフトリミット+側初期値(③)の調整を行います。③から②を引いた値を“パラメーター№3ソフトリミット+側”に入力します。
(パラメーター変更方法は前頁手順 3 と同様の方法でいます。)
原点ソフトリミット変更
前のSEソフトリミット変更後のSE(ストロークエンド)
ME(メカエンド)
“パラメーター№3ソフトリミット+側”にソフトリミット変更後の値(③ー②)を入力します。
③
③+②
パラメーターNo.3 ソフトリミット+側③ー②
パラメーターNo.3 ソフトリミット+側初期値③
アクション
アクチュエーターはME(メカエンド)へ移動後(下図Ⅰ→)、前頁手順 3 で再設定した分、
反転移動(① + ②)します。
ME(メカエンド)
②
ⅠME
①
パラメーター No.3ソフトリミット+側
初期値③
原点復帰オフセット変更後のSE
パラメーター№22“ 原点復帰オフセット量 ”
に変更後のZ相から原点までの
距離(元の値②+③)を3で
再設定
原点復帰オフセット量変更前のSE(ストロークエンド)
原点復帰オフセット量変更後の原点
原点復帰オフセット量変更前の原点
②
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ -9-
アクチュエータ―が以下仕様の場合、原点復帰方向を変更する事はできません。以下3つに該当しないか、確認してください。
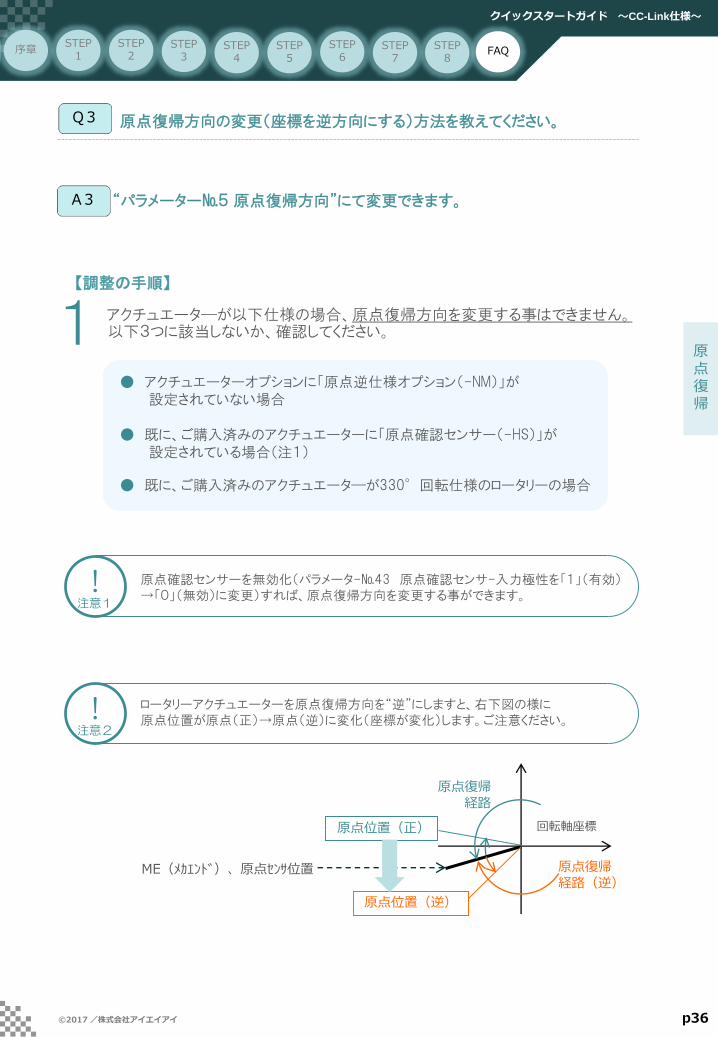
原点復帰方向の変更(座標を逆方向にする)方法を教えてください。
ME(メカエンド)、原点センサ位置
原点位置(正)
原点位置(逆)
p36
Q3
A3 “パラメーター№5 原点復帰方向”にて変更できます。
1【調整の手順】
● アクチュエーターオプションに「原点逆仕様オプション(-NM)」が設定されていない場合
● 既に、ご購入済みのアクチュエーターに「原点確認センサー(-HS)」が設定されている場合(注1)
● 既に、ご購入済みのアクチュエータ―が330°回転仕様のロータリーの場合
!注意1
原点確認センサーを無効化(パラメータ-№43 原点確認センサ-入力極性を「1」(有効)→「0」(無効)に変更)すれば、原点復帰方向を変更する事ができます。
!注意2
ロータリーアクチュエーターを原点復帰方向を“逆”にしますと、右下図の様に原点位置が原点(正)→原点(逆)に変化(座標が変化)します。ご注意ください。
原点復帰経路
原点復帰経路(逆)
回転軸座標
原点復帰
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p37
原点復帰
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
①各種モーターストレートタイプ(ロータリ含む)
パラメーター№5 原点復帰方向 「1」(モータ正回転)
①各種モーターストレートタイプ(ロ-タリ-含む)
パラメーター№5 原点復帰方向 「0」(モ-タ-逆回転)
②各種モーター折返しタイプ
パラメーター№5 原点復帰方向 「0」(モータ逆回転)
②各種モーター折返しタイプ
パラメーター№5 原点復帰方向 「1」(モ-タ-正回転)
アクチュエーターのモーター取付方法(ストレート / 折返し)や、ご希望の原点復帰方向(正 / 逆)により“パラメータ- №5 原点復帰方向”設定値(1/0)は以下のように変化します。 設定値「」を確認してください。
2
モータ-折返しタイプ
(ロッドタイプ等)
原点SE(ストロークエンド)
100mm
0mm
(スライダータイプ)
モーター
(2) 原点 【逆】仕様 (オプション設定時)
(1) 原点 【正】
原点SE(ストロークエンド)
100mm
0mm
モーター
(ロッドタイプ等)
ストレートタイプ
(スライダータイプ)
原点 SE(ストロークエンド)
モーター
(ロッドタイプ等)
0mm
100mm
(スライダータイプ)
ストレートタイプ
原点 SE(ストロークエンド)
0mm
100mm
(スライダータイプ)
モーター
(ロッドタイプ等)
モーター折返しタイプ
パラメーター №5 を設定してください。3
① パラメーター(P) をクリック② 編集(E) をクリック③ パラメーター №5 を選択④ 設定値(mm)を入力⑤ コントローラー再起動
① メニュー1② パラメーター編集画面を選択③ パラメーター№5 を選択④ 設定値 (mm) を入力⑤ コントローラー再起動
【TB-02】 【パソコン対応ソフト】

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p38
原点復帰
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
上位PLC等からコントローラーへの以下信号入力を不要にする方法はありませんか?
(1) サーボON (SON信号)(2) 一時停止 (*STP信号)(3) 原点復帰 (HOME信号)
以下のパラメーター設定値を変更してください。
Q4
A4
「原点復帰入力」を上記設定にすることで、電源再投入後、原点復帰完了信号(出力、HEND)がOFFしている場合には、一番初めのポジション移動信号指令を入れると、自動的に原点復帰動作をしてから、指定位置に移動します。
POINT
「サーボON入力」を上記設定にすることで、コントローラーへのAC100/200Ⅴ電源投入後自動でアクチュエーターのモーターをサーボONします。
POINT
① パラメーター(P) をクリック② 編集(E) をクリック③ 変更したいパラメーター № を選択④ 設定値を入力⑤ コントローラー再起動
① メニュー1② パラメーター編集画面を選択③ 変更したいパラメーター№ を選択④ 設定値を入力⑤ コントローラー再起動
【TB-02】 【パソコン対応ソフト】
パラメーターNo.
パラメーター名 変更内容
15 一時停止入力設定値を「0」(有効:工場出荷時初期設定)→ 「1」(無効)
21 サーボON入力
40 原点復帰入力
変更するパラメーターを以下に記載します。
設定方法は以下の通りです。
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ
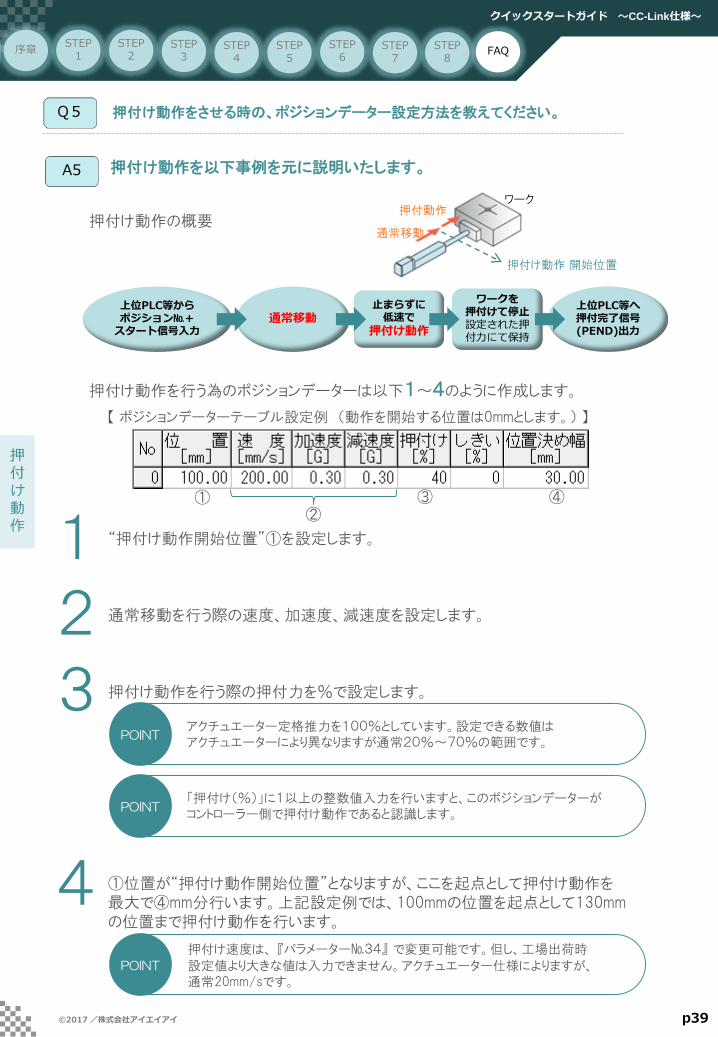
押付け動作を以下事例を元に説明いたします。
Q5 押付け動作をさせる時の、ポジションデーター設定方法を教えてください。
A5
p39
押付け動作
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
押付け動作の概要
【 ポジションデーターテーブル設定例 (動作を開始する位置は0mmとします。) 】
押付け動作を行う為のポジションデーターは以下1~4のように作成します。
“押付け動作開始位置”①を設定します。
通常移動を行う際の速度、加速度、減速度を設定します。
押付け動作を行う際の押付力を%で設定します。
①位置が“押付け動作開始位置”となりますが、ここを起点として押付け動作を最大で④mm分行います。上記設定例では、100mmの位置を起点として130mmの位置まで押付け動作を行います。
アクチュエーター定格推力を100%としています。設定できる数値はアクチュエーターにより異なりますが通常20%~70%の範囲です。
POINT
「押付け(%)」に1以上の整数値入力を行いますと、このポジションデーターがコントローラー側で押付け動作であると認識します。
POINT
押付け速度は、 『パラメーター№34』 で変更可能です。但し、工場出荷時
設定値より大きな値は入力できません。アクチュエーター仕様によりますが、通常20mm/sです。
POINT
上位PLC等へ押付完了信号(PEND)出力
ワークを押付けて停止設定された押付力にて保持
止まらずに低速で
押付け動作
上位PLC等からポジション№+スタート信号入力
通常移動
通常移動
押付動作ワーク
押付け動作 開始位置
1
2
3
4
①②
③ ④

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ
空振り判定は、以下のように行う事ができます。
Q6押付け動作中に、“空振り”した事(位置決め幅内でワークに当たらなかった場合)を判定する方法を教えてください。
A6
p40
押付け動作
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
ポジション№(PC*)の入力からスタート信号(CSTR)のONまで 6ms 以上の時間を空けてください。PLCで 6ms のタイマー処理をしてもコントローラーには同時に入力され、別のポジションへ位置決めしてしまうことがありますので、PLCのスキャンタイムも考慮したタイマー設定をお願いします。
!注意1
!注意2
完了ポジション№出力は、移動中は“0”(全てOFF)となります。
押付け動作完了(ワークに押し当たって停止した状態)と“空振り”をした場合の違いを以下に記載します。(空振りの判定を確認する場合には、必ず完了ポジション№出力(PM*)を考慮してください。)
押付け動作のI/Oタイムチャートを以下に記載します。
状態位置決め完了信号
「PEND」完了ポジションNo.
「PM *」
押付け完了 ON ON
空振り OFF ON

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ
Q7
A7
押付け動作中に『0DC 押付け動作範囲オーバーエラー』が発生!対処方法は?
p41
押付け動作
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
【 ポジションデーターテーブル設定例 】
100mm(①)速度
200mm/s(②)
速度
時間
20mm/s
30mm(⑤)
押付速度
【通常移動】 【押付け動作】
加速(③)
減速(④) ワーク
『位置決め幅』内
●通常移動範囲でワークに当たって停止
●位置決め幅内でワークに当たって停止したが、その後、通常移動範囲まで押し戻されてしまった場合
通常移動範囲内
押付け動作設定
この範囲(位置決め幅内)で押付け動作が行えるよう
設定してください。
『位置決め幅』内通常移動範囲内
※押付け動作開始位置(上記例=100mmの位置)への移動指令が終了した後であれば、このアラームが発生します。但し、終了する前(押付け開始位置よりだいぶ手前)の場合は“0C1:サーボ異常”が発生します。
【 押付け動作範囲オーバーエラー発生例 】
① ② ③ ④ ⑤
ポジションデーターテーブルで設定された“位置決め幅”外で押付け動作が行われた場合に発生するアラームです。(下記発生例参照)このアラームが発生した場合には、押付動作が“位置決め幅”内で行えるようポジションデーターの再設定してください。

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ
押付け動作時の移動速度は変更できますか?
アクチュエーターシリーズ タイプ 押付け時速度(mm/s)
RCP2
RA2C 3
RA8C,10C 10
RCP2/2Wグリッパー 5
RCP3RA2AC,RA2BCRA2AR,RA2BR
5
RCP4 RCP4グリッパー 5
RCP5 RA8C/8R、RA10C/10R 10
RCP6RA8C/8RRRA8C/8R
WRA16C/16R10
RCL
RA1L 2
RA2L 4
RA3L 8RCD RA1D(A)、GRSN(A) 5
P/A/DCONに接続できるアクチュエーターシリーズの内、最大押付速度が20mm/s未満に設定されているアクチュエーターを以下に記載いたします。
押付け速度は、入力上限を20mm/s(初期値20mm/s)としてコントローラー『パラメーター№34』で変更可能です。但し、入力値が20mm/s未満のアクチュエータ―がありますのでご注意ください。上限値以上の数値は入力できません。(入力値過大メッセージが表示されます。)
Q8
A8
1
p42
押付け動作
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
『パラメーター №34 』の設定は、弊社パソコン対応ソフトまたは、ティーチングボックスにて設定できます。2
① パラメーター(P) をクリック② 編集(E) をクリック③ パラメーター№34 を選択④ 設定値を入力⑤ コントローラー再起動
① メニュー1② パラメーター編集画面を選択③ パラメーター№34 を選択④ 設定値を入力⑤ コントローラー再起動
【TB-02】 【パソコン対応ソフト】

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ
Q9
A9
p43
押付け動作
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
●パラメーター №91 設定値 『0』 (出荷時) = アクチュエーターの最大電流値を制限値として停止しています。
●パラメーター №91 設定値『1』 = ポジションデーターテーブル内『押付け(%)』で設定した押付け電流制限値で停止
【 ポジションデータテーブル設定例 】
押付け動作設定
1【調整の手順】
空振り停止時のアクチュエーター推力は、パラメーター№91『押付け空振り停止時電流制限値』を「0」から「1」に変更する事によりポジションデーターで設定した押付け力をそのまま維持して停止させる事ができます。
2 『パラメーター №91 』の設定は、弊社パソコン対応ソフトまたは、ティーチングボックスにて設定できます。
① パラメーター(P) をクリック② 編集(E) をクリック③ パラメーター№91 を選択④ 設定値を入力⑤ コントローラー再起動
① メニュー1② パラメーター編集画面を選択③ パラメーター№91 を選択④ 設定値を入力⑤ コントローラー再起動
【TB-02】 【パソコン対応ソフト】
“空振り”停止時の推力設定は出来ますか?押付け力をそのまま維持したいのですが・・・
設定可能です。
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ
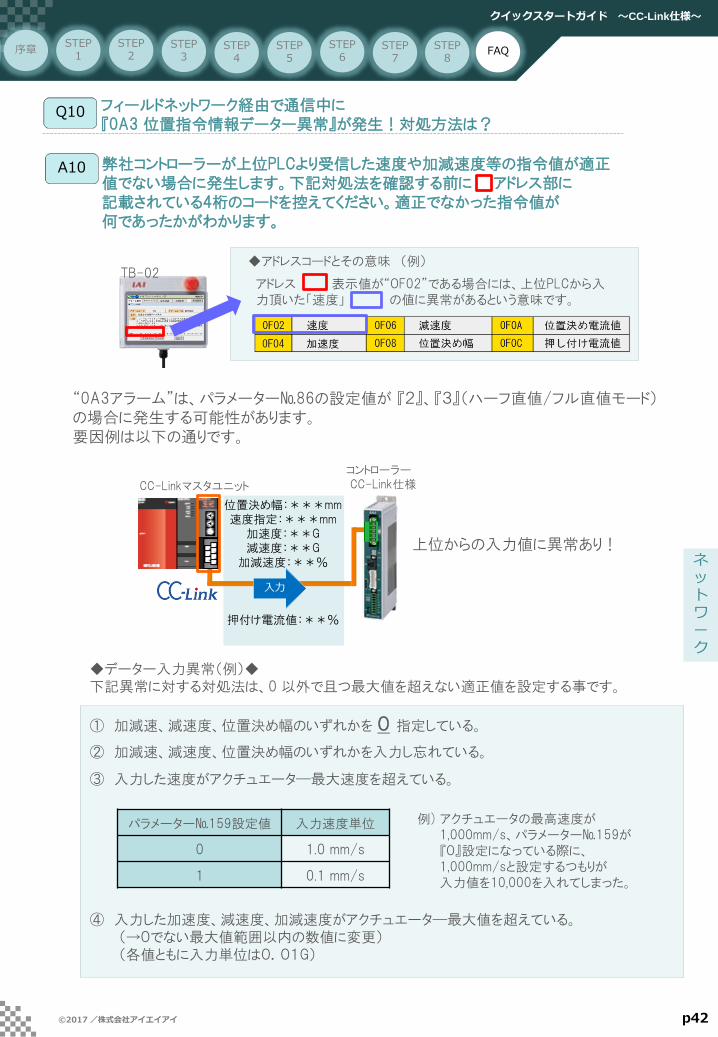
フィールドネットワーク経由で通信中に『0A3 位置指令情報データー異常』が発生!対処方法は?
“0A3アラーム”は、パラメーター№86の設定値が 『2』、『3』(ハーフ直値/フル直値モード)の場合に発生する可能性があります。要因例は以下の通りです。
Q10
A10
p42
ネットワーク
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
弊社コントローラーが上位PLCより受信した速度や加減速度等の指令値が適正値でない場合に発生します。下記対処法を確認する前に アドレス部に記載されている4桁のコードを控えてください。適正でなかった指令値が何であったかがわかります。
CC-Linkマスタユニット
TB-02
位置決め幅:***mm速度指定:***mm
加速度:**G減速度:**G
加減速度:**%
押付け電流値:**%
入力
コントローラーCC-Link仕様
◆アドレスコードとその意味 (例)
アドレス 表示値が“0F02”である場合には、上位PLCから入力頂いた「速度」 の値に異常があるという意味です。
◆データー入力異常(例)◆下記異常に対する対処法は、0 以外で且つ最大値を超えない適正値を設定する事です。
① 加減速、減速度、位置決め幅のいずれかを 0 指定している。
② 加減速、減速度、位置決め幅のいずれかを入力し忘れている。
③ 入力した速度がアクチュエータ―最大速度を超えている。
④ 入力した加速度、減速度、加減速度がアクチュエータ―最大値を超えている。(→0でない最大値範囲以内の数値に変更)(各値ともに入力単位は0.01G)
パラメーター№159設定値 入力速度単位
0 1.0 mm/s
1 0.1 mm/s
上位からの入力値に異常あり!
例) アクチュエータの最高速度が1,000mm/s、パラメーター№159が『0』設定になっている際に、1,000mm/sと設定するつもりが入力値を10,000を入れてしまった。

クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p43
ネットワーク
序章 STEP4
STEP2
STEP3
STEP6
STEP1 FAQ
STEP5
STEP7
STEP8
『0A2 ポジションデーター異常』が発生!対処方法は?Q11
A11【発生要因】
弊社コントローラーに未登録のポジション№に対して上位PLC等から移動指令を行った。もしくはポジションデーターに設定された値に誤りがある場合に発生します。
“0A2アラーム”は、パラメーター№86の設定値が 『0』(リモート I/Oモード)、『1』(簡易直値モード)、『4』(リモート I/Oモード2)に設定した場合に発生する可能性があります。発生する要因例は以下の通りです。
CC-Linkマスターユニット
位置決めポジション№
コントローラーCC-Link仕様
上位からの入力値・タイミング等に異常あり!
TB-02ポジションデータは
あらかじめコントローラに登録。
◆データ入力異常(例)◆
① で登録していないポジション№を上位PLCから指定 した。
→ で登録済ポジション№を上位PLCから指定 してください。
② でポジション№入力後、“CSTR(位置決めスタート信号:ONで移動指令)を入力するまでの時間が6ms未満だった。
→ ポジション№入力後、6ms以上の時間を空けて、CSTR(位置決めスタート信号)を入力するように上位PLCの設定変更してください。
③ パラメーター№25で設定値『4』(電磁弁モード 1)もしくは、『5』(電磁弁モード 2)設定している際に、 で設定したポジションデータ内が相対移動設定“インクリ=1”となっている位置決めポジション№を指定 し CSTR(位置決めスタート信号)をONさせた。
→ で指定したいポジション№のポジションデーター内における相対移動設定“インクリ”=1を絶対値移動設定“インクリ”=0に変更し再登録 してください。
④ 指定したポジション№のポジションデータ内 に於いて、“位置”データが接続しているアクチュエーターのソフトリミット(有効ストローク)を超えている
→ で指定したいポジション№のポジションデーター内に於ける“位置”を接続しているアクチュエーターの有効ストローク内に変更し再登録 してください。
1
2
1
CSTR信号(位置決めスタート信号)
入力
2
1
2
2
1
1
1
1
1 2
1
2
2
クイックスタートガイド ~CC-Link仕様~
©2017 /株式会社アイエイアイ p47

管理番号 MJ0371-1A (2017年5月)