person-following using fuzzy inference - wseas · person-following using fuzzy inference samir...
TRANSCRIPT

Person-Following using Fuzzy Inference
SAMIR SHAKER
American University of Beirut
ME Department
Riad El-Solh 1107 2020, Beirut
LEBANON
JEAN J. SAADE
American University of Beirut
ECE Department
Riad El-Solh 1107 2020, Beirut
LEBANON
DANIEL ASMAR
American University of Beirut
ME Department
Riad El-Solh 1107 2020, Beirut
LEBANON
Abstract: For a service robot, being able to follow a person to do a required task is a must have skill. Such an ability,
however simple in concept, has some requirements to be met which makes a simplistic direct implementation
unsatisfactory. Most notably, the robot following the human has to keep at a certain safe distance from the person
and at the same time move in a smooth manner which does not appear threatening to the person. Also, such
a smooth movement would potentially prolong the lifetime of the robot’s locomotive system. In this paper, we
propose using fuzzy inference as the decision system achieving smoothness and person-following behavior while
keeping a safe distance from that person. The system was tested using a laser range finder to detect a person’s legs
giving the inference system a distance and a direction to go to. The experimental results showed that even though
the detection of legs was subject to noise and false negatives, the robot still achieved the goals of smoothness of
motion, keeping of a safe distance, and of course, following its target.
Key–Words: Person following, Fuzzy inference, Leg detection, Smooth movement
1 Introduction
Following a person is an important ability for mobile
robots which interact with people. Also, any robot
which interacts with a person needs to exhibit move-
ment and behaviour which appear unthreatening to a
person having had no interaction with robots before
[1]. A jerky movement by a mobile robot can be per-
ceived as a threat by a person having had no a priori
interaction with a robot and even by someone who has
in case the movement is totally unexpected. Take the
example of an elderly person equipped with a robot
wheelchair required to follow a nurse. Smoothness
of robot motion is especially required in this case as
the robot’s elderly passenger might get hurt from jerky
motion.
Therefore, this paper proposes a fuzzy inference
system meant to control and smoothen out the motion
of a robot while following a person and, at the same
time, keeping it at a safe distance from the person that
is being followed. This ability has been developed in
[2] for the case of a car following another car. The
developed ability, however, has been modified here to
accommodate the case of a mobile robot following a
human. Human motion type is always as smooth as
that of a car and autonomously detecting and tracking
people is relatively more difficult unless the person is
fitted with specialized tracking equipment [3] which
is not convenient and not always possible.
The problem of person following by a robot has
been addressed previously in some research. The
method developed in [4] requires a previously ac-
quired map of the environment to achieve tracking.
This limitation imposed on the method makes it un-
suitable for cases where the robot is required to fre-
quently change the place in which it operates. The
method developed in [5] uses two kinds of sensors,
a laser range finder and a camera for tracking. This
requires unneeded extra cost for its implementation
seeing that it requires two sensors instead of one to
achieve its goal.
Kobilarov et al. [6] propose two different meth-
ods for tracking people. The first method failed be-
cause of the lack of needed environmental features
which were not adequately provided by just an omni-
directional camera. This admitted failure motivated its
authors to pursue another method. The second method
compensates for the camera failure by adding a laser
to keep track of the person which adds to the overall
system cost. The method developed in [7] also uses
an omni-directional camera and requires a new train-
ing of an Artificial Neural Network (ANN) for each
person that has to be followed. Such a requirement
restricts the generality of the method and is unsuitable
for emergency situations such as an elderly sitting on
a robot wheelchair having to follow a new doctor or
nurse.
Consequently, in order to achieve the smoothness
RECENT ADVANCES IN SYSTEMS, COMMUNICATIONS & COMPUTERS,Selected Papers from the WSEAS Conferences in Hangzhou, China, April 6-8, 2008
ISBN: 978-960-6766-61-9 19 ISSN: 1790-5117

and safety objectives of the person following problem
of a mobile robot while keeping the offered problem
solution as general as possible and its implementation
cost as low as possible, a method is proposed in this
paper that makes use of a laser range finder mounted
on a wheeled mobile robot to detect a persons legs and
follow them in a smooth motion while keeping a safe
distance from that person. To achieve these goals, a
fuzzy inference system has been designed using a vi-
sualization program specially developed for that pur-
pose. This fuzzy inference system will be made to
work in conjunction with a leg detection algorithm
that uses the data provided by the laser. The remain-
der of this paper is structured as follows. Section 2
describes the method used to detect a person’s legs.
The output of this algorithm is fed into the fuzy infer-
ence system described in Section 3. Then, Section 4
presents the test platform. Finally, Section 5 shows the
results of the tests which were performed by making
the robot follow a person.
2 Leg Detection
The first step in following a person is detecting the
person’s legs. The output of that step is a position
of a person’s legs relative to the robot, the differen-
tial of which is fed into the fuzzy system described in
Section 3 as the relative velocity of the person with
respect to the robot.
The leg detection algorithm is based on the work
of Milella et al. [8]. It proceeds as follows. First, a
180o laser scan is performed with a 1
o separation be-
tween two consecutive readings [10]. The laser has
a maximum resolution of 0.5o, but this was not used
since it was not necessary for the practicality of the
considered problem and also to improve real-time per-
formance. The data is then processed as shown in the
flowchart of Figure 1(a).
The laser range readings are scanned consecu-
tively looking for a large difference defined to be
above a certain threshold, here taken to be equal to 1
m. This threshold was chosen because a moving per-
son will typically not have an object in front of him
closer than 1 m. So any laser beam passing next to
or between his legs will stop at a distance of at least
1 m above the one blocked by his legs. The bound-
aries we are looking for are shown in dots in Figure
1(b). These also include the first and last laser read-
ings. The regions between these boundaries constitute
possible legs. Then, each region’s width is compared
with a typical human leg width. If it is, the location
of the leg and its size are stored. On the next scan,
this information is used to to make sure the same set
of legs are being followed.
(a) Leg Detection Algorithm
(b) The laser readings are shown as lines and the identified bound-
aries are marked with dots.
Figure 1: Leg Detection
RECENT ADVANCES IN SYSTEMS, COMMUNICATIONS & COMPUTERS,Selected Papers from the WSEAS Conferences in Hangzhou, China, April 6-8, 2008
ISBN: 978-960-6766-61-9 20 ISSN: 1790-5117
Once one or more legs are detected, the closest
moving two legs are considered those of the person
which needs to be followed. To get the position of that
person, the two positions of each of a persons leg are
averaged to obtain the center position of that person,
and in case only one leg was detected, only that legs
center is taken. This error introduced in the detection
of legs can be compensated for by the fuzzy inference
system thereafter.
3 The Fuzzy Inference System
Fuzzy logic is called for when the problem to be dealt
with is humanistic and complex and where the use of
classical mathematical models are deemed too precise
for a problem or situation which is imprecise by na-
ture. Hence, fuzzy logic and inference is most suitable
when the input to the system is noisy, and the solution
requires a human kind of reasoning. Following a hu-
man while maintaining smoothness and safety of mo-
tion requires humanistic reasoning because first, it is a
human or intelligent behavior that is being duplicated,
and second, the data sensed by the robot to detect two
moving human legs is sometimes noisy and could be
occasionally wrong.
The fuzzy inference is based on a system for car
following developed by in [2]. To adapt that sys-
tem from the car following scenario to following hu-
mans, a visualization program was developed which
gives real time feedback in response to direct ma-
nipulation of the membership functions. It is impor-
tant to note here that such adaptation from following
cars to following humans is one of the major advan-
tages of fuzzy logic over Artificial Neural Networks
as the fuzzy solution allows redesign and modification
based on its easy-to-understand linguistic solution to
the problem.The robot should follow the legs in a smooth way.
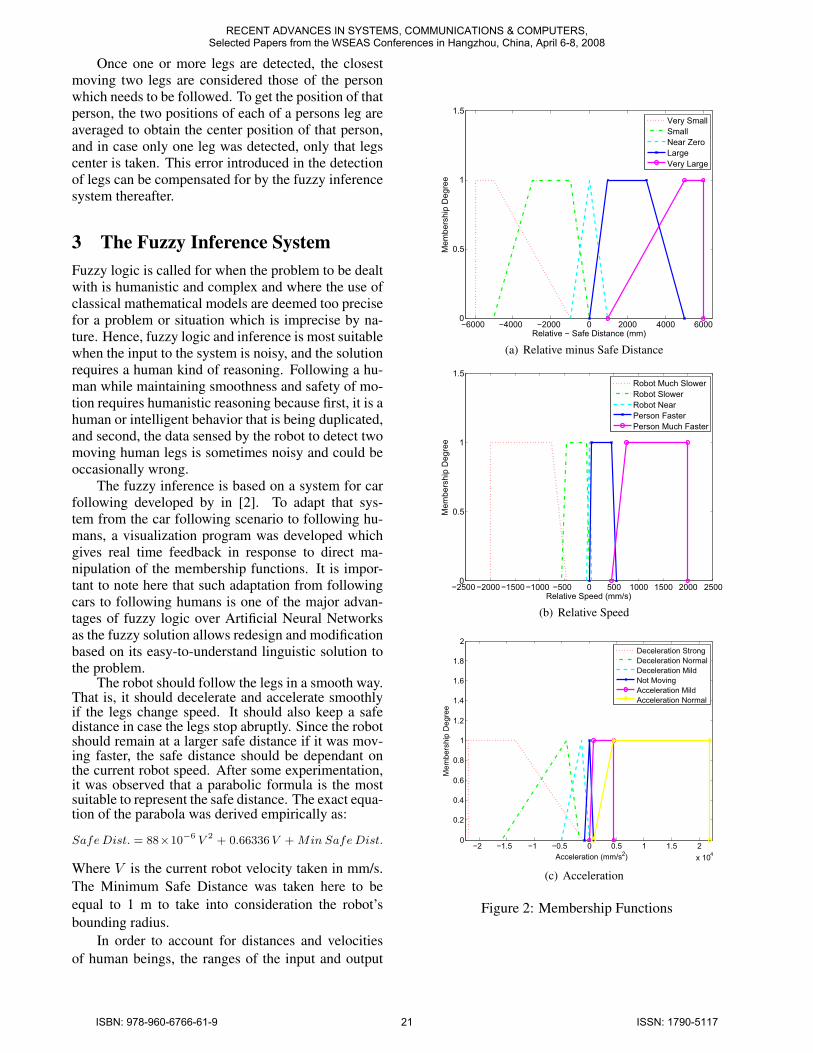
That is, it should decelerate and accelerate smoothlyif the legs change speed. It should also keep a safedistance in case the legs stop abruptly. Since the robotshould remain at a larger safe distance if it was mov-ing faster, the safe distance should be dependant onthe current robot speed. After some experimentation,it was observed that a parabolic formula is the mostsuitable to represent the safe distance. The exact equa-tion of the parabola was derived empirically as:
Safe Dist. = 88×10−6
V2
+ 0.66336 V + Min Safe Dist.
Where V is the current robot velocity taken in mm/s.
The Minimum Safe Distance was taken here to be
equal to 1 m to take into consideration the robot’s
bounding radius.
In order to account for distances and velocities
of human beings, the ranges of the input and output
−6000 −4000 −2000 0 2000 4000 60000
0.5
1
1.5
Relative − Safe Distance (mm)
Me
mb
ers
hip
De
gre
e
Very Small
Small
Near Zero
Large
Very Large
(a) Relative minus Safe Distance
−2500−2000−1500−1000 −500 0 500 1000 1500 2000 25000
0.5
1
1.5
Relative Speed (mm/s)
Me
mb
ers
hip
De
gre
e
Robot Much Slower
Robot Slower
Robot Near
Person Faster
Person Much Faster
(b) Relative Speed
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2
x 104
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Acceleration (mm/s2)
Mem
bers
hip
Degre
e
Deceleration Strong
Deceleration Normal
Deceleration Mild
Not Moving
Acceleration Mild
Acceleration Normal
(c) Acceleration
Figure 2: Membership Functions
RECENT ADVANCES IN SYSTEMS, COMMUNICATIONS & COMPUTERS,Selected Papers from the WSEAS Conferences in Hangzhou, China, April 6-8, 2008
ISBN: 978-960-6766-61-9 21 ISSN: 1790-5117
RV RD − SD Very Small Small Near Zero Large Very Large
Robot Much Slower Not Moving Acc. Mild Acc. Normal Acc. Normal Acc. Normal
Robot Slower Dec. Normal Not Moving Acc. Mild Acc. Normal Acc. Normal
Robot Near Dec. Strong Dec. Mild Not Moving Acc. Mild Acc. Normal
Person Faster Acc. Normal Acc. Normal Acc. Normal Acc. Normal Acc. Normal
Person Much Faster Dec. Normal Dec. Normal Acc. Mild Acc. Mild Not Moving
Figure 3: Fuzzy inference rules
variables of the fuzzy inference system as well as the
ranges and shapes of the assigned membership func-
tions, as in [2], were modified appropriately, and this
is shown in Figure 2. The fuzzy system uses two in-
puts, the relative velocity of the robot to the person’s
legs and the difference between the relative distance
to the legs and the safe distance. The output is the
needed acceleration (See [2]).
In addition, the amount of acceleration outputed
by the system is influenced by the fuzzy inference
rules of Figure 3. The rules in [2] used directly for
the case of person following produced a lot of oscil-
lations and very slow movement towards the person.
Therefore, the rules in [2] were drastically modified to
make the robot keep going forward towards the person
when the person is obviously far away waiting for the
robot to arrive. Also, they were modified to make the
robot arrive to a complete stop when it is within the
defined safe minimum distance, meaning, to prevent
oscillations. Moreover, the very abrupt deceleration
that was used in [2] was not applied here. While such
decelerations are justified for the case of automobiles
in order to avoid accidents, robots drive at much lower
speeds and therefore can accommodate lower accel-
erations while ensuring speedy arrivals with minimal
oscillations.
As for the defuzzification technique used, the first
of maxima was tested in the beginning but it resulted
in large oscillations. The reason for this is that the
first of maxima defuzzification gives large values of
acceleration between different acceleration levels. So,
going from Normal to Mild Acceleration for example
will result in a large change in speed. This is why this
method was replaced with the usual centroid defuzzi-
fication method which yielded a smoother change in
velocity.
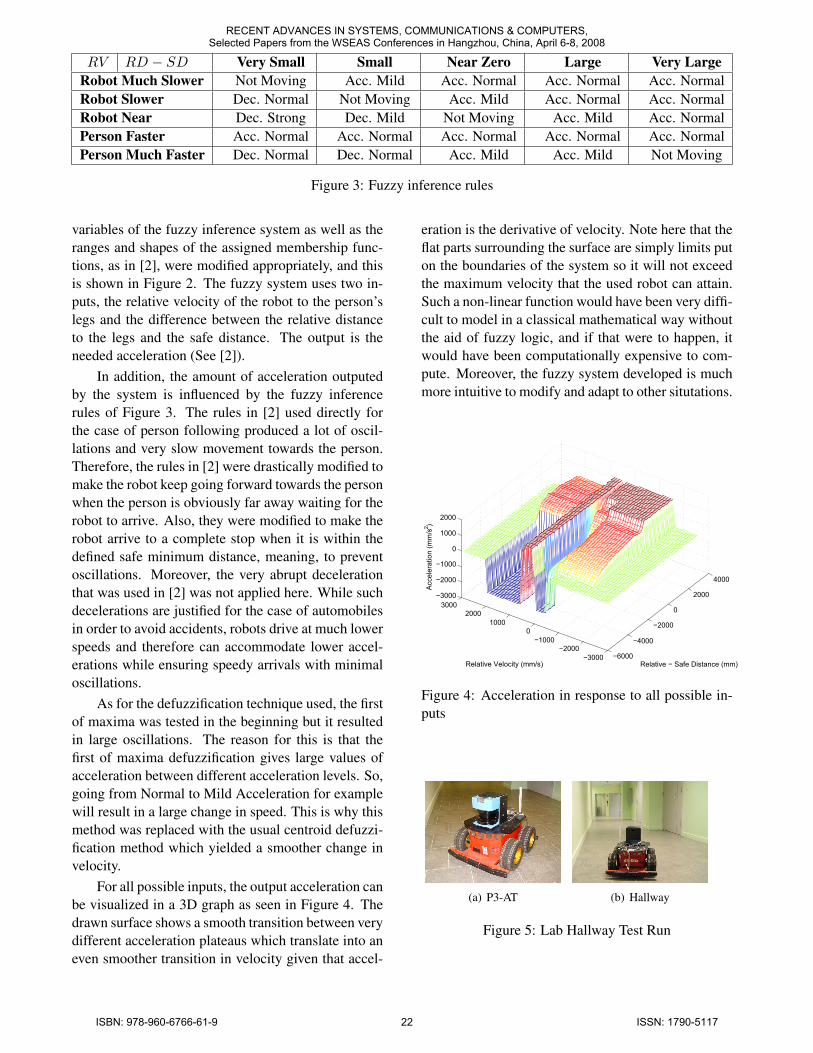
For all possible inputs, the output acceleration can
be visualized in a 3D graph as seen in Figure 4. The
drawn surface shows a smooth transition between very
different acceleration plateaus which translate into an
even smoother transition in velocity given that accel-
eration is the derivative of velocity. Note here that the
flat parts surrounding the surface are simply limits put
on the boundaries of the system so it will not exceed
the maximum velocity that the used robot can attain.
Such a non-linear function would have been very diffi-
cult to model in a classical mathematical way without
the aid of fuzzy logic, and if that were to happen, it
would have been computationally expensive to com-
pute. Moreover, the fuzzy system developed is much
more intuitive to modify and adapt to other situtations.
−6000
−4000
−2000
0
2000
4000
−3000
−2000
−1000
0
1000
2000
3000
−3000
−2000
−1000
0
1000
2000
Relative − Safe Distance (mm)Relative Velocity (mm/s)
Accele
ration (
mm
/s2)
Figure 4: Acceleration in response to all possible in-
puts
(a) P3-AT (b) Hallway
Figure 5: Lab Hallway Test Run
RECENT ADVANCES IN SYSTEMS, COMMUNICATIONS & COMPUTERS,Selected Papers from the WSEAS Conferences in Hangzhou, China, April 6-8, 2008
ISBN: 978-960-6766-61-9 22 ISSN: 1790-5117

4 Test Platform
The algorithm was implemented on P3-AT by Mobile
Robots [9] shown in Figure 5(a). The P3-AT robot
is a research platform suitable for many research ar-
eas including mapping and localization. It has a Pen-
tium 3 processor on board with USB and serial ports
to mount different sensors.
To detect legs, the laser range sensor [10], shown
in Figure 5(a), was mounted on the robot and inter-
faced to the serial port of the on-board computer.
The algorithm was implemented in C++. The
robot commands where sent using the Advanced
Robotics Interface for Applications (ARIA) [11] and
then was simulated on MobileSim (Mobile Robots
Simulator) [12]. After successful simulations, the sys-
tem was implemented in real-time on the robot.
For additional visualization aid and fuzzy system
design, the result of laser scans and leg detection, as
well as the visualization of the member functions were
drawn using the Open Graphics Library (OpenGL)
[13] as seen in Figure 6. These visualization were
made interactive as their shape were modifiable at run-
time. This allowed tweaking the membership func-
tions emprically to find the shapes that gave the op-
timum results: no oscillations, a smooth ride and a
reasonable time to arrive at the target goal, i.e., the
person being followed.
5 Results
The algorithm was first tested on the MobileSim sim-
ulator [12]. As seen in Figure 7, the relative distance
minus the safe distance tends to zero smoothly com-
batting sensor noise. Also, Figure 8(b) shows the ve-
locity of the robot when the velocity of the person’s
legs vary and are preceived by the robot as shown
in Figure 8(a). Even though the velocity of the per-
son’s legs (Figure 8(a)) show high-frequency fluctua-
tions, the velocity response of the robot (Figure 8(b))
show smaller fluctuations of lower frequency than the
ones exhibited by the sensed leg velocity. In prac-
tice, when the algorithm was tested on the robot, these
fluctuations in velocity were barely noticable. There-
fore, the algorithm achieved the goal of moving the
robot smoothly towards the minimum safe distance,
here taken to be equal to 1 m, without exhibiting any
noticable oscillations.
Then, the algorithm was tested in the lab hallways
shown in Figure 5(b). First, detection of legs was
tested by letting the robot orient itself towards them
0 5 10 15 20 25 30 35−400
−200
0
200
400
600
800
1000
1200
1400
Time (s)
Re
lative
− S
afe
Dis
tan
ce
(m
m)
StandingStill
ToRobot
MovingAway
StandingStill
StandingStill
Figure 7: Relative - Safe Distance
0 5 10 15 20 25 30 35−1000
−800
−600
−400
−200
0
200
400
600
800
1000
Time (s)
Pe
rso
n V
elo
city (
mm
/s)
StandingStill
MovingAway
StandingStill
ToRobot
StandingStill
(a) Person Velocity
0 5 10 15 20 25 30 35−1000
−800
−600
−400
−200
0
200
400
600
800
1000
Time (s)
Ro
bo
t V
elo
city (
mm
/s)
StandingStill
MovingAway
StandingStill
ToRobot
StandingStill
(b) Robot Velocity
Figure 8: Velocity of the Person compared to that of
the Robot
RECENT ADVANCES IN SYSTEMS, COMMUNICATIONS & COMPUTERS,Selected Papers from the WSEAS Conferences in Hangzhou, China, April 6-8, 2008
ISBN: 978-960-6766-61-9 23 ISSN: 1790-5117

Figure 6: Algorthim Simulation and Visual Tweaking Platform. The OpenGL rendering of sensed data (Top Left),
the MobileSim simulator (Top Right) and the fuzzy membership functions of three fuzzy variables (Bottom three
windows)
while staying in its place. Then, the robot was allowed
to follow a passing person in the hallway. The robot
followed the person in front of it smoothly and moved
backwards when the person approached it at a distance
larger than the safe distance. Moreover, when another
person passed during the experiment, the robot cor-
rectly kept following the original person as it detected
that the distance to the legs of the new person would
not correspond to a typical human walking speed. Fur-
thermore, the detected legs of the person originally
followed were closer to the last known position of the
legs.
6 Conclusion
In this paper, a fuzzy inference system used by a robot
for following people in a smooth and safe manner was
developed. It consists of a fuzzy rule based inference
system which can output the acceleration needed for
a robot to follow a human detected by a range sen-
sor. Only a laser sensor was used to detect the legs
of the person which reduced the cost of the system.
Also, the system does not require any special adapta-
tion to the environment that it is supposed to work in.
These objectives combined were not met in previous
studies. This robot ability opens way for new, innova-
tive applications in various fields for aiding people in
their tasks. Future work should test the system using
different sensors such as using a camera for measur-
ing the width of a person’s legs as a way to estimate
their distance from the robot instead of a laser. Such a
way to measure distance, which is more prone to error
than using a laser, would test the system against more
noisy data and see the extents of which it can combat
it. Also, it would help develop a more general system
which can be easily adapted to any sensor from which
range data can be extracted.
References:
[1] R. Gockley, J. Forlizzi, and R. Simmons.
Natural person-following behavior for social
robots. Proceedings of the ACM/IEEE inter-
national Conference on Human-Robot interac-
tion (Arlington, Virginia, USA, March 10 - 12,
2007). HRI ’07. ACM, New York, NY, pp. 17-
24.
RECENT ADVANCES IN SYSTEMS, COMMUNICATIONS & COMPUTERS,Selected Papers from the WSEAS Conferences in Hangzhou, China, April 6-8, 2008
ISBN: 978-960-6766-61-9 24 ISSN: 1790-5117

[2] J. J. Saade, O. Houalla, H. Merhi and J.
Kabbani, Fuzzy Inference Based Car Following
Collision Prevention Controller, WSEAS Trans-
actions on Systems. Vol. 5, October 2006, pp.
2291-2298.
[3] R. Bianco, M. Caretti, and S. Nolfi. Developing
a robot able to follow a human target in a domes-
tic environment, Proceedings of the First Robo-
Care Workshop, Rome, Italy, October 2003, pp.
11-14.
[4] S. Thrun; M. Montemerlo; and W. Whittaker,
2002. Conditional Particle filters for Simulta-
neous Mobile Robot Localization and People-
Tracking, Proceedings. ICRA ’02. IEEE Interna-
tional Conference on Robotics and Automation.
Vol. 1, 2002, pp. 695-701.
[5] M. Kleinehagenbrock, S. Lang, J. Fritsch, F.
Lomker, G. A. Fink, and G. Sagerer. Person
tracking with a mobile robot based on multi-
modal anchoring. In IEEE Int, Workshop on
Robot and Human Interactive Communication
(ROMAN), 2002, pp. 423-429.
[6] M. Kobilarov, G. Sukhatme, J. Hyams, and
P. Batavia. People tracking and following with
mobile robot using an omnidirectional camera
and a laser, Proceedings of the IEEE Interna-
tional Conference on Robotics and Automation,
Orlando, Florida, May 2006, pp. 557–562.
[7] G. Cielniak, M. Miladinovic, D. Ham-
marin, L. Goransson, A. Lilienthal, and
T. Duckett. Appearance-based tracking
of persons with an omnidirectional vi-
sion sensor, Proceedings of the Fourth
IEEE Workshop on Omnidirectional Vision.
http://www.cs.wustl.edu/ pless/omnivisFinal/duckett.pdf
[8] A. Milella, C. Dimiccoli, G. Cicirelli and
A. Distante, Laser-Based People-Following
for Human-Augmented Mapping of Indoor En-
vironments, Proceedings of the 25th IASTED
International Multi-Converence Artificial Intel-
ligence and Applications. Innsbruck, Austria,
February 12-14, 2007, pp. 151 - 155.
[9] P3-AT: The High Performance
All-Terrain Robot. Homepage:
http://www.activrobots.com/ROBOTS/p2at.html
[10] Laser Mapping and Navigation Sys-
tem with ARNL Software. Homepage:
http://www.activrobots.com/ACCESSORIES/laser.html
[11] Advanced Robotics Interface for
Applications (ARIA). Homepage:
http://www.activrobots.com/SOFTWARE/aria.html
[12] MobileSim: The MobileR-
obots Simulator. Homepage:
http://robots.mobilerobots.com/MobileSim/README.html
[13] Open Graphics Library (OpenGL). Homepage:
http://www.opengl.org/
RECENT ADVANCES IN SYSTEMS, COMMUNICATIONS & COMPUTERS,Selected Papers from the WSEAS Conferences in Hangzhou, China, April 6-8, 2008
ISBN: 978-960-6766-61-9 25 ISSN: 1790-5117