physical causality of action verbs in grounded language understanding
TRANSCRIPT
Physical Causality of Action Verbs in Grounded Language Understanding
Sep 11 (Sun.), 2016#SNLP2016
4
1
• : (Tsutsumi Fukumu / Bao Han)
• Twitter : @levelfour_
• 8 9 Preferred Networks
•
2

• (action verb) Change of State (CoS) /
(physical causality)
• physical causality (
)
• ( ) grounding
3
Physical Causality
• ( )
( )
NumberOfPieces = “one becomes many”
• 4 semantic role causality
agent = / patient = / source = / destination = (cf.) https://ja.wikipedia.org/wiki/%E4%B8%BB%E9%A1%8C%E5%BD%B9%E5%89%B2
4

Physical Causality
bounding box
• agent( ) =
• patient( ) =
• source( ) = http://aclweb.org/anthology/P/P16/P16-1171.pdf
5

CoS / Physical Causality•
(Dixon, et al., 2006)
6

CoS / Physical Causality
http://aclweb.org/anthology/P/P16/P16-1171.pdf
7

semantic role
INPUT:
OUTPUT: semantic role
8

movietrack γ1
track γ2
track γ3
CoS 1
CoS 2
CoS 3
visual detector
captionsemantic role λ1
semantic role λ2
VC-model
VC
λ1 → γk1 λ2 → γk2
INPUTOUTPUT
N.B. VC = Verb Causality9
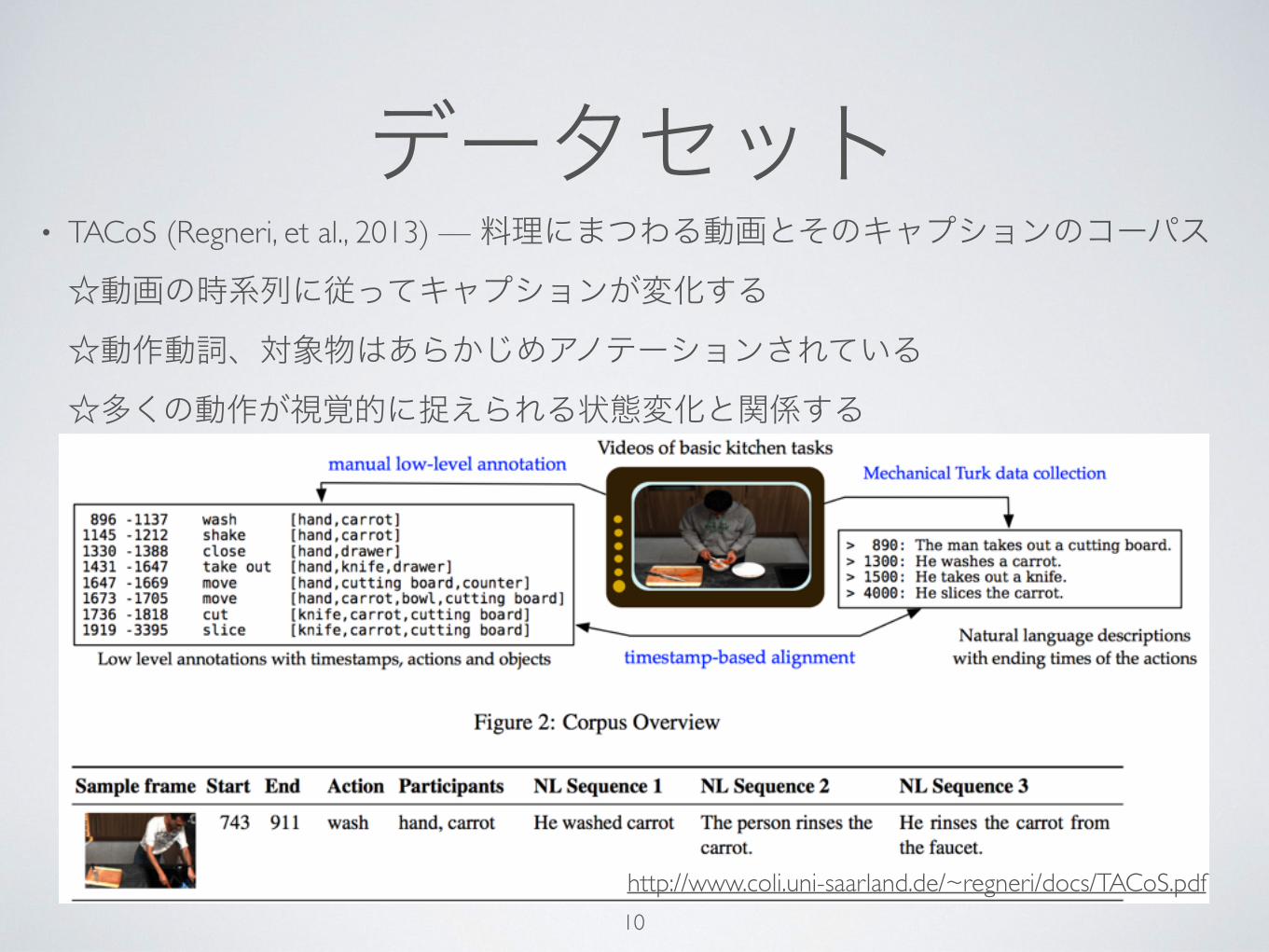
• TACoS (Regneri, et al., 2013) —
http://www.coli.uni-saarland.de/~regneri/docs/TACoS.pdf10

•
Amazon Mechanical Turks CoS
1800
• (
)
(Yang, et al., 2013) (Milan, et al., 2014)
+
11

CoS
movietrack γ1
track γ2
track γ3
CoS 1
CoS 2
CoS 3
visual detector
captionsemantic role λ1
semantic role λ2
VC-model
VC
λ1 → γk1 λ2 → γk2
INPUTOUTPUT
12
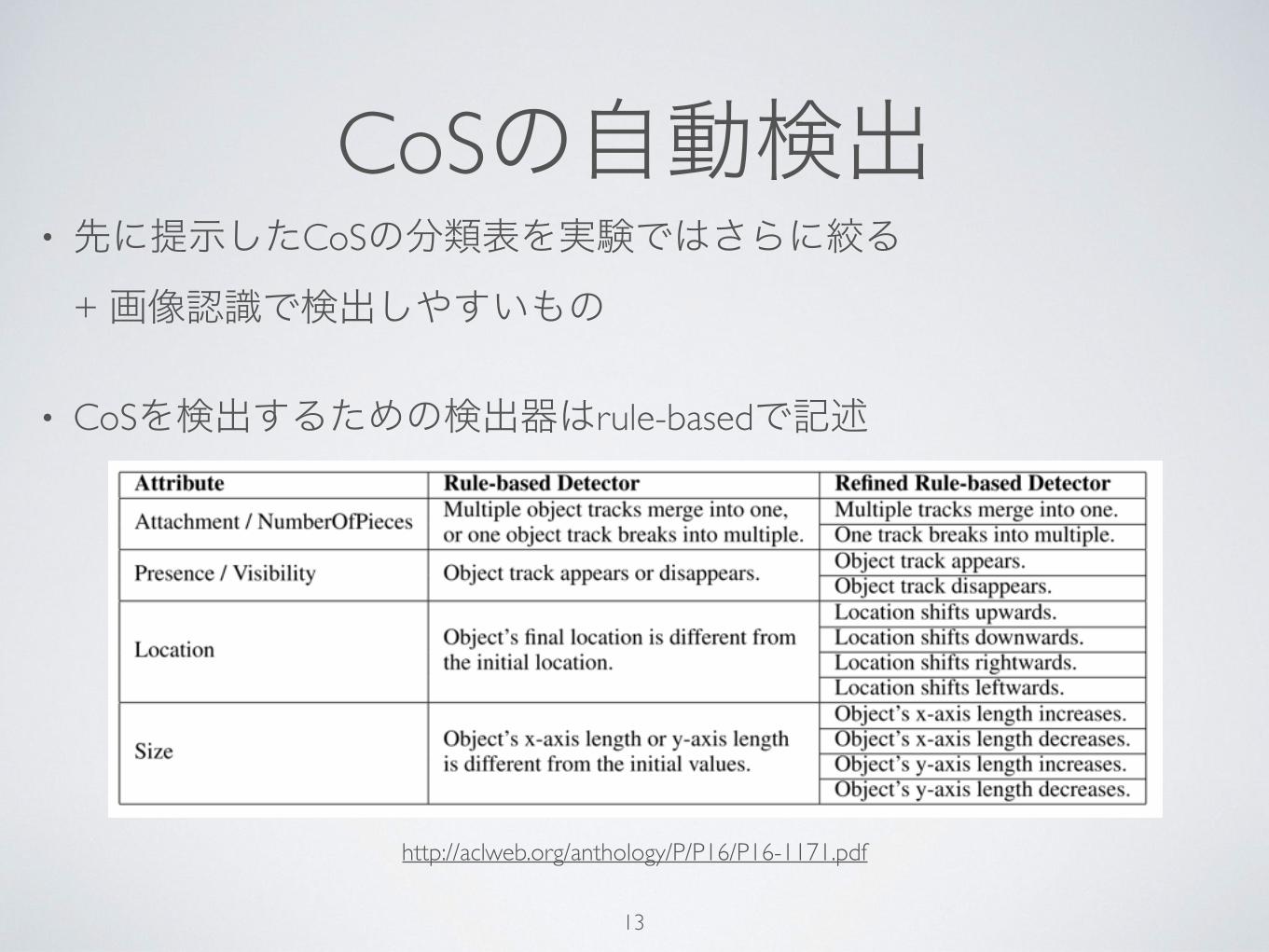
CoS• CoS
+
• CoS rule-based
http://aclweb.org/anthology/P/P16/P16-1171.pdf
13

Verb Causality
movietrack γ1
track γ2
track γ3
CoS 1
CoS 2
CoS 3
visual detector
captionsemantic role λ1
semantic role λ2
VC-model
VC
λ1 → γk1 λ2 → γk2
INPUTOUTPUT
14

Verb Causality• : semantic role λi γk
semantic role
(Yang, et al., 2016)
• 2 ( VC-model )
1. VC-Knowledge —
2. VC-Learning — CRF
15

1 (VC-Knowledge)• patient( )
grounding
( )
• agent( ), source( ),
destination( ) grounding
patient
rule-basedhttp://aclweb.org/anthology/P/P16/P16-1171.pdf
16

1 (VC-Knowledge)• verb causality vector c(v)
1. v patient CoS
one-hot vector
2. → c(v)
• causality detection vector d(γi) γi CoS one-hot vector
• c(v) d(γi) γi patient
17
1 (VC-Knowledge)
• verb causality vector
•
18

2 (VC-Learning)• (Tellex, et al., 2011), (Yang, et al., 2016) (
) CRF
λ1
φ1
γ1
λ2
φ2
γ2
λ3
φ3
γ3
Agent(hand) Patient(the knife) Source(the drawer)“get the knifefrom the drawer”
19
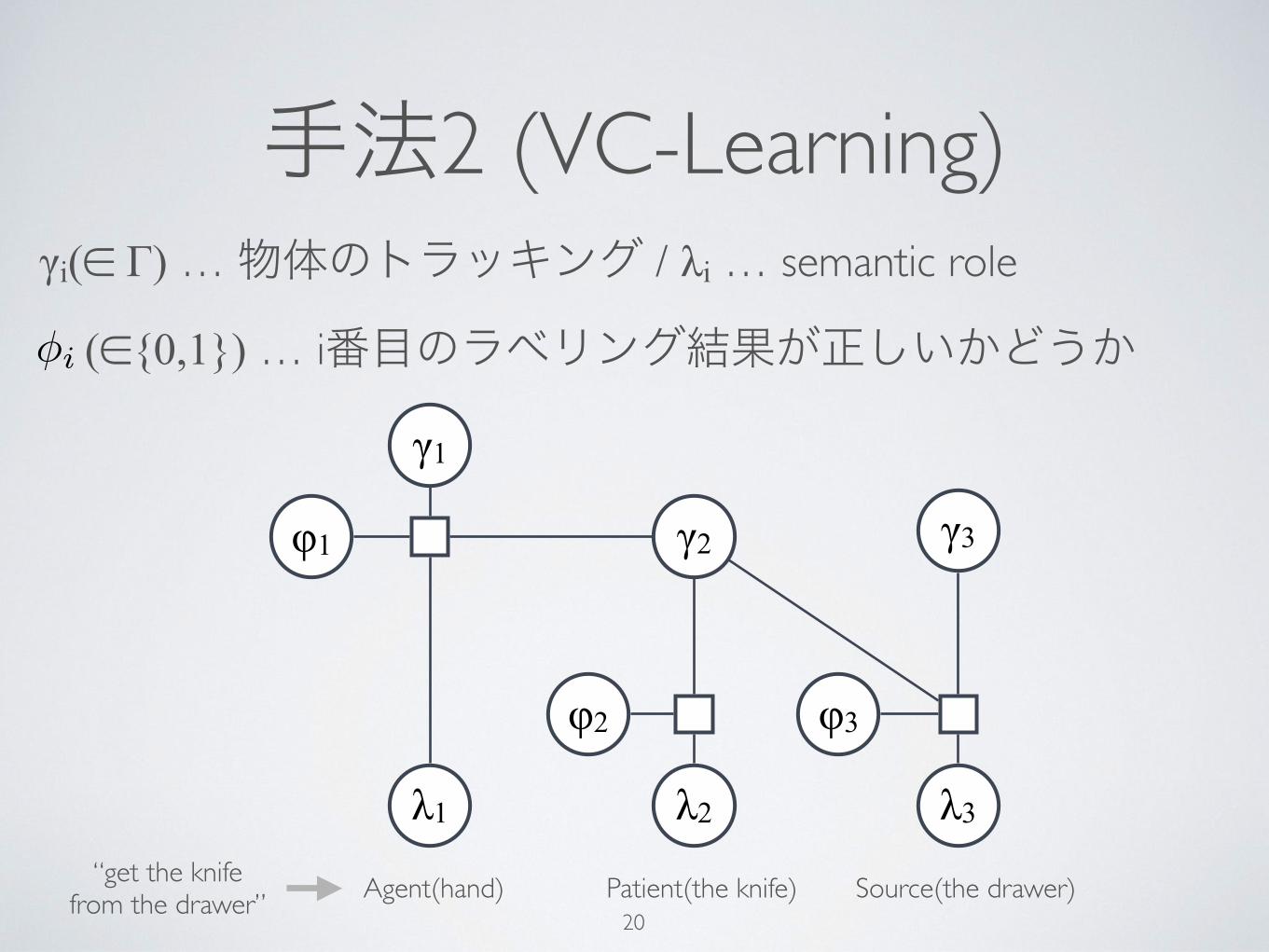
2 (VC-Learning)γi(∈ Γ) … / λi … semantic role
(∈{0,1}) … i
λ1
φ1
γ1
λ2
φ2
γ2
λ3
φ3
γ3
Agent(hand) Patient(the knife) Source(the drawer)“get the knifefrom the drawer”
�i
20

2 (VC-Learning)p(�|⇤,�, v) = 1
Z
Y
i
i(�i,�i,�, v)
i(�i,�i,�, v) = exp
X
l
wlfl(�i,�i,�, v)
!
i grounding i
fl wl
wl
21
2 (VC-Learning)
λ1
φ1
γ1
λ2
φ2
γ2
λ3
φ3
γ3
Agent(hand) Patient(the knife) Source(the drawer)“get the knifefrom the drawer”
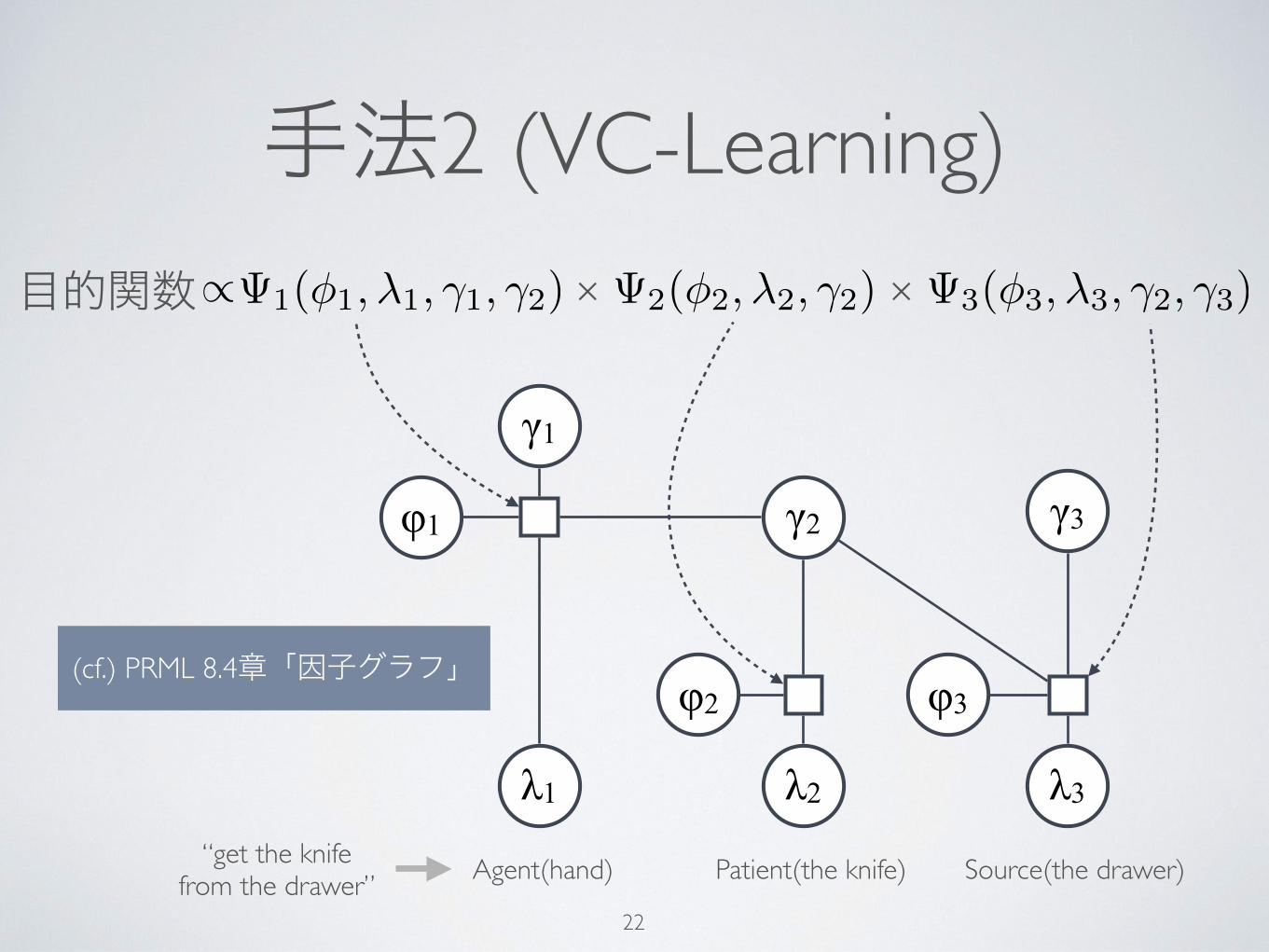
1(�1,�1, �1, �2) 2(�2,�2, �2) 3(�3,�3, �2, �3)
(cf.) PRML 8.4
× ×/
22

2 (VC-Learning)
2
• semantic role λi γi
• v causality detection d(Γ)
• fl φi
i(�i,�i,�, v) = exp
X
l
wlfl(�i,�i,�, v)
!
23

2 (VC-Learning)
λ1
φ1
γ1
γ2
1(�1,�1, �1, �2, v) = exp(w1f1(�1,�1, �1))⇥ exp(w2f2(�1, �1, �2, v))
24

2 (VC-Learning)
•
λi, Γ, v
φi wl
p(Φ = 1) p(Φ ≠ 1)
p(�|⇤,�, v) = 1
Zexp
X
i
X
l
wlfl(�i,�i,�, v)
!
(given)(not given)
25

2 (VC-Learning)
•
wl Φ 1
Λ, v Γ
(patient → source → destination → agent beam search )
p(�|⇤,�, v) = 1
Zexp
X
i
X
l
wlfl(�i,�i,�, v)
!trained
inputfixed
estimate
26

VC-Learning (Tellex, et al., 2011), (Yang, et al., 2016)
• (Tellex, et al., 2011) —
(Tellex, et al., 2011) SDC( )
4 semantic role
(Yang, et. al. 2016)
• (Yang, et al., 2016) — semantic role
( ) physical
causality
28

• semantic role CoS / physical causality
physical causality
• Patient CoS
• 4 semantic role(Agent / Patient/ Source / Destination)
grounding
29

• [1] Gao, et al., 2016. Physical Causality of Action Verbs in Grounded Language Understanding. Proceedings of the 54th Annual Meeting of the Association for Computational Linguistics.
• [2] Dixon, et al., 2006. Adjective Classes: A Cross-linguistic Typology. Explorations in Language and Space C. Oxford University Press.
• [3] Regneri, et al., 2013. Grounding action descriptions in videos. Transactions of the Association for Com- putational Linguistics (TACL), 1:25–36.
• [4] Yang, et al., 2013. Detection of manipulation action consequences (mac). In Proceedings of the IEEE Conference on Computer Vision and Pattern Recog- nition, pages 2563–2570.
• [5] Milan, et al., 2014. Continuous energy minimization for multi- target tracking. Pattern Analysis and Machine Intel- ligence, IEEE Transactions on, 36(1):58–72.
• [6] Yang, et al., 2016. Grounded semantic role labeling. In Proceedings of the 2016 Conference of the North American Chap- ter of the Association for Computational Linguistics, San Diego, CA.
• [7] Tellex, et al., 2011. Understanding natural language commands for robotic navigation and mobile manipulation. In Association for the Ad- vancement of Artificial Intelligence (AAAI).
30