physically-based modeling, simulation and animation ming c. lin [email protected] lin
TRANSCRIPT
Physically-Based Modeling, Simulation and Animation
Ming C. Lin
http://www.cs.unc.edu/~lin
http://gamma.cs.unc.edu/
GAMMA Research Group
Geometric Algorithms for Motion, Modeling and Animation
Faculty
• Ming C. Lin
• Dinesh Manocha
Graduate Students• Lakulish Antani• Abhinav Golas• Anish Chandak• Russell Gayle (DOE Fellow)• Stephen Guy (Intel Fellow)• Sean Curtis• Christian Lauterbach
Huai-Ping Lee• Ravish Mehra• Paul Merrell• Qi Mo

Graduate Students• Will Moss• Rahul Narain (Intel Fellow)• Nikunj Raghuvanshi• Zhimin Ren• Jason Sewall (CS Alumni Fellow)• Jamie Snape• Micah Taylor• David Wilkie• Yero Heh• Liangjun Zhang (NSF-CI Fellow)• Yu Zheng
Current Research Interests
• Physics-Based Modeling, Simulation and Animation
• Robot Algorithms in Physical World and Virtual Environments
• Multi-sensory Interaction & Applications
• General Purpose Computing on GPUs
• Rendering Acceleration Techniques for Massive Models
• Geometric and Solid Modeling
Physically-Based Modeling, Simulation and Animation
• Interactive Proximity Queries– fast collision detection for flexible bodies– physically-based geometric algorithms
• Framework for Automatic Simplification of Dynamic Simulation– metrics & switching btw simultion LODs
• Simulation of Flexible Bodies and Natural Phenomena
Our Recent Work
• Computation of gen. Voronoi diagram & proximity queries using graphics processors
http://gamma.cs.unc.edu/{voronoi,PIVOT,CULLIDE,DiFi}
• Interactive collision detection gamma.cs.unc.edu/Collision_mpeg/collision.html
• Simulation Level of Detail gamma.cs.unc.edu/SLOD, gamma.cs.unc.edu/HSLOD
• Modeling deformable bodies & nature gamma.cs.unc.edu/{ffd, fem, DDF, HAIR, ICE, HYB_ICE,
LIGHTNING, QCULLIDE}
• 3D polyhedral morphing gamma.cs.unc.edu/3Dmorphing

Simulation of Dendritic Ice Growth
http://gamma.cs.unc.edu/ICEhttp://gamma.cs.unc.edu/HYB_ICE
[Kim & Lin, SCA 2003; SCA 2004; SCA 2006]
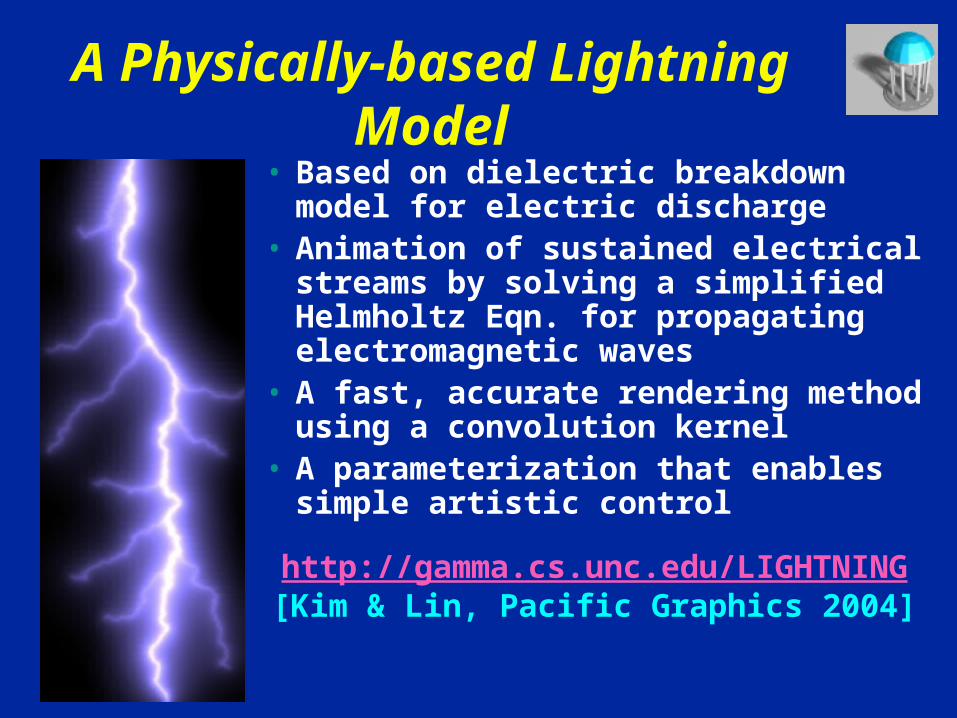
A Physically-based Lightning Model
• Based on dielectric breakdown model for electric discharge
• Animation of sustained electrical streams by solving a simplified Helmholtz Eqn. for propagating electromagnetic waves
• A fast, accurate rendering method using a convolution kernel
• A parameterization that enables simple artistic control
http://gamma.cs.unc.edu/LIGHTNING[Kim & Lin, Pacific Graphics 2004]

Hair Simulation Using LODs
http://gamma.cs.unc.edu/HSLODhttp://gamma.cs.unc.edu/HAIR
http://gamma.cs.unc.edu/HairWS[Ward, et al, CASA 2003; PG 2003; CASA 2004]

Adaptive Dynamics
• Automatic simplification of forward dynamics for articulated bodies based on motion error metrics using a hybrid-body representation, achieving up to two orders of magnitude performance gain
[Redon, Galoppo, Lin; SIGGRAPH 2005]

Collision Detection Using GPU
• Applicable to deformable & breakable objects with changing topology
• Use occlusion culling for collision tests• Unified framework for both intra- and inter- object
collision culling
http://gamma.cs.unc.edu/CULLIDE/http://gamma.cs.unc.edu/RCULLIDE/http://gamma.cs.unc.edu/QCULLIDE/
http://gamma.cs.unc.edu/CDCD/[Govindaraju, et al, GH’03; VRST’04; VR’05; SIGGRAPH’05]
Collision Detection for Deformable Models using Chromatic Decomposition.
http://gamma.cs.unc.edu/CDCD/[Govindaraju, et al; SIGGRAPH 2005]
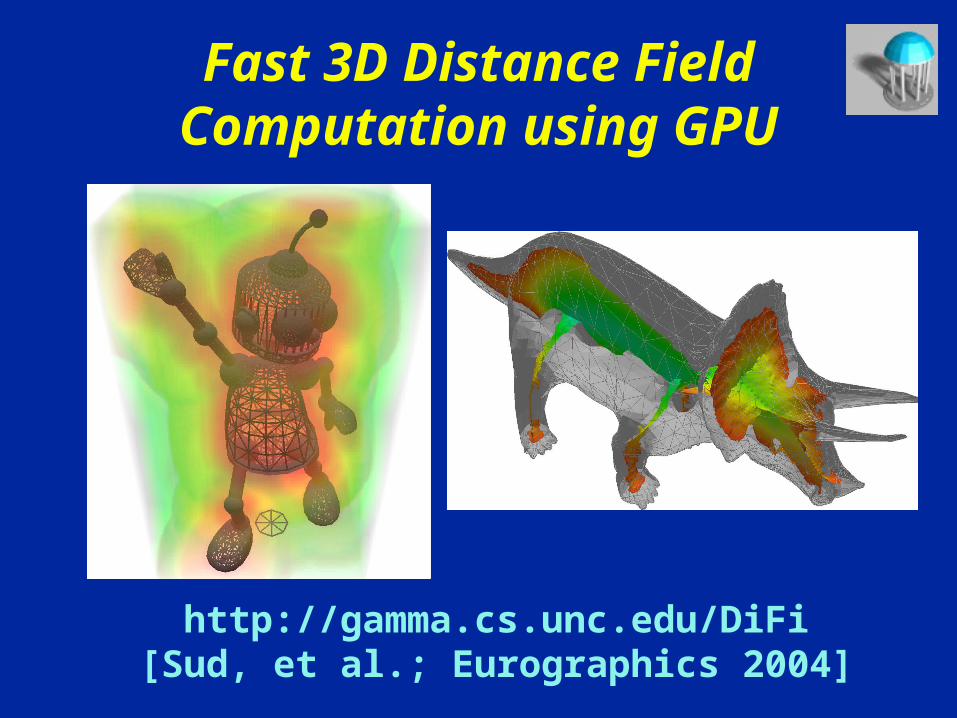
Fast 3D Distance Field Computation using GPU
http://gamma.cs.unc.edu/DiFi[Sud, et al.; Eurographics 2004]
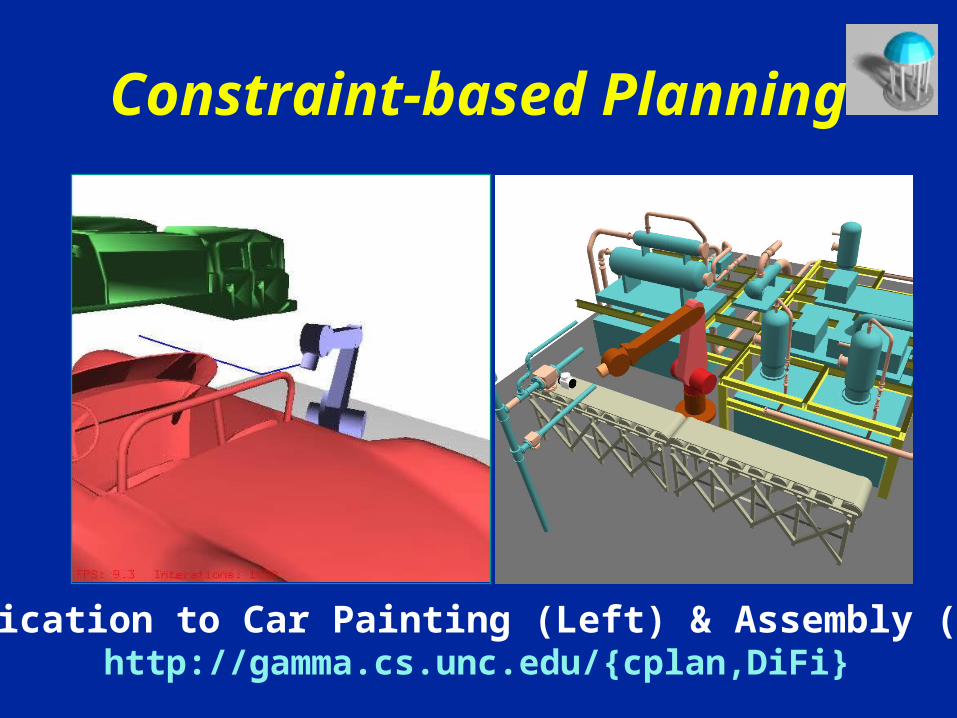
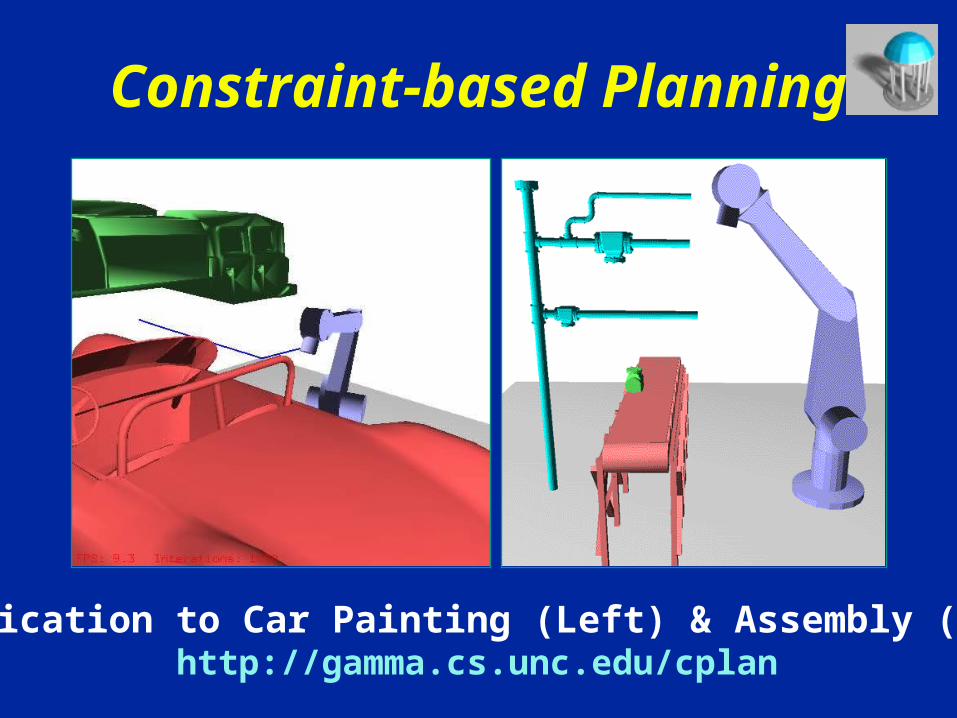
Constraint-based Planning
Application to Car Painting (Left) & Assembly (Right)http://gamma.cs.unc.edu/{cplan,DiFi}
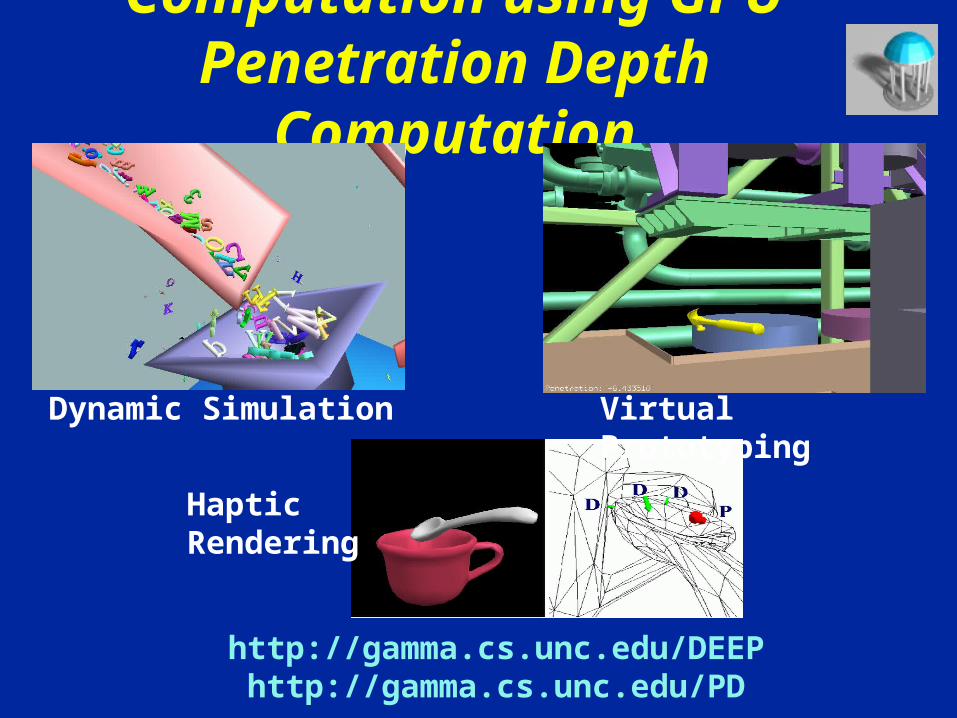
Computation using GPUPenetration Depth Computation
Dynamic Simulation Virtual Prototyping
Haptic Rendering
http://gamma.cs.unc.edu/DEEPhttp://gamma.cs.unc.edu/PD

PIVOT: Simulation of Randomly Moving Gears & Letter Blocks
http://gamma.cs.unc.edu/PIVOT
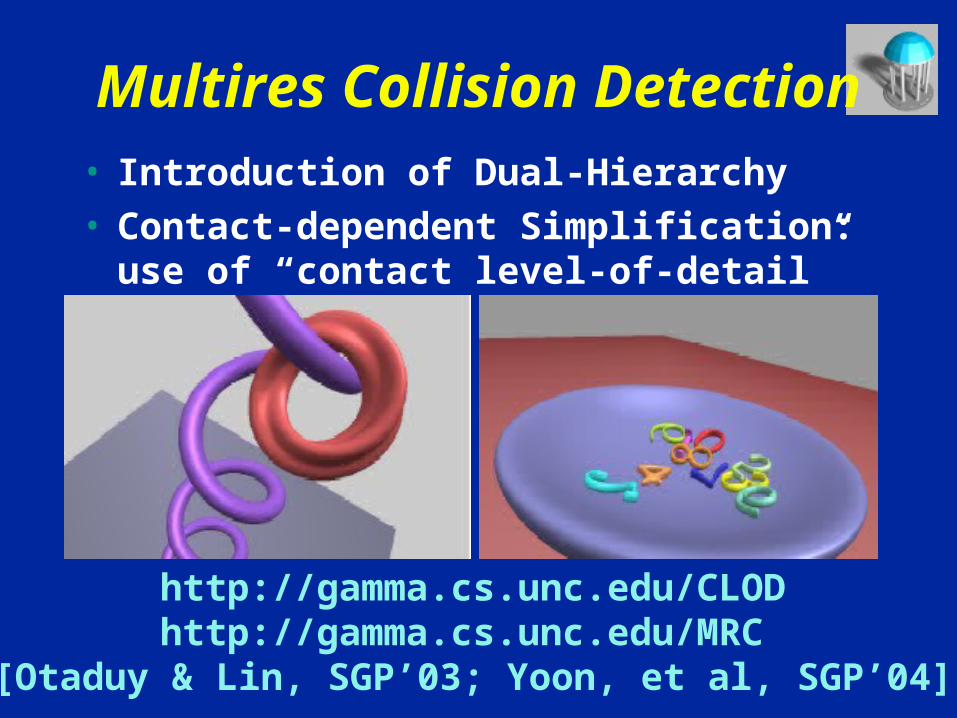
Multires Collision Detection• Introduction of Dual-Hierarchy• Contact-dependent Simplification: use of
“contact level-of-detail”
http://gamma.cs.unc.edu/CLODhttp://gamma.cs.unc.edu/MRC
[Otaduy & Lin, SGP’03; Yoon, et al, SGP’04]
Simulation of Deformable Bodies
Video demonstrations available at:http://gamma.cs.unc.edu/DDF

Fast Contact Handling Using Dynamic Deformation Textures
http://gamma.cs.unc.edu/ABDefo/http://gamma.cs.unc.edu/D2T/
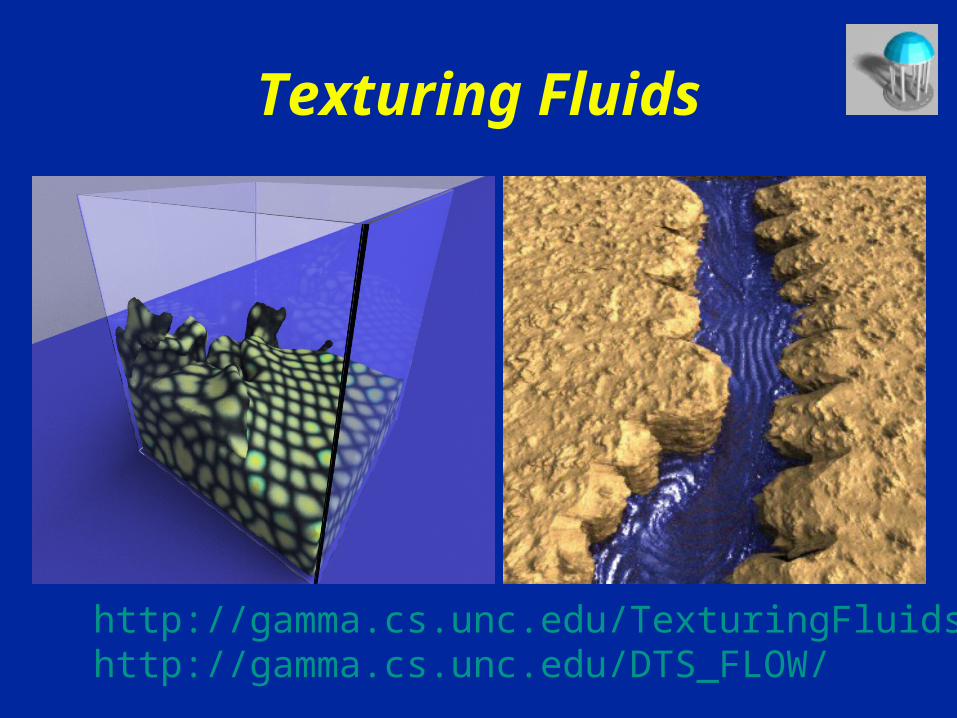
Texturing Fluids
http://gamma.cs.unc.edu/TexturingFluids/http://gamma.cs.unc.edu/DTS_FLOW/
More Fluids
• Explosion & Compressible Fluids [ACM SIGGRAPH/EG Symposium on Computer Animation]
http://gamma.cs.unc.edu/SHOCK/
• Fluids in Video [Eurographics 2008]
http://gamma.cs.unc.edu/FluidInVideo
• Turbulence [SiGGRAPH Asia 2008]
http://gamma.cs.unc.edu/turbulence/
Research Challenges
• Real-time modeling, cutting, and control of deformable materials (e.g. soft tissues & organs, fibrin fibers in blood flow, virtual clay)
• Interactive simulation & rendering using LOD representations
• Simulation of water droplets, ice/lightning/snow formation/melting, interface between fluid+deformable, etc.
Future Applications
• Virtual scultping
• Real-time interaction with VEs • Task training & rehearsal, prototyping of
experimentation, etc.
• Surgical training system: modeling virtual sinus
• nanoSimulator: better behavior modeling through realistic interaction & manipulation
• Modeling and simulation of fibrin fibers
• CG special effects

System Demonstrations
Check out the video clips & papers athttp://gamma.cs.unc.edu/collide
http://gamma.cs.unc.edu/simulation
And
http://www.cs.unc.edu/~lin/
Current Research Interests
• Physics-Based Modeling, Simulation and Animation
• Robot Algorithms in Physical World and Virtual Environments
• Multi-sensory Interaction & Applications
• General Purpose Computing on GPUs
• Rendering Acceleration Techniques for Massive Models
• Geometric and Solid Modeling
Robot Algorithms for Physical World & Virtual Environments
• Motion Planning with Multiple Degrees of Freedom and Constraints– acquiring real-world data for IBR/VBR– task planning of autonomous characters– high-level motion generation– navigation toolkit for virtual environments– manipulation of flexible plates/materials for
medical tool design and surgical planning maintainability study of parts
– computer-assisted parts assembly

Real-time Motion Planning: Dynamic Scene
Distance buffer of floor-plan used as potential field
Plan motion of music stand around moving furniture
http://gamma.cs.unc.edu/planning/videos.shtml
Constraint-based Planning
Application to Car Painting (Left) & Assembly (Right)http://gamma.cs.unc.edu/cplan

Planning of Deformable Robots• Planning of flexible models
• Physically-based modeling
• Constraint-based planning
• Handling of both rigid and deforming obstacles
• Use of GPU
• Fast (real-time for simpler robots and environments)
http://gamma.cs.unc.edu/DPLAN
http://gamma.cs.unc.edu/FlexiPLAN
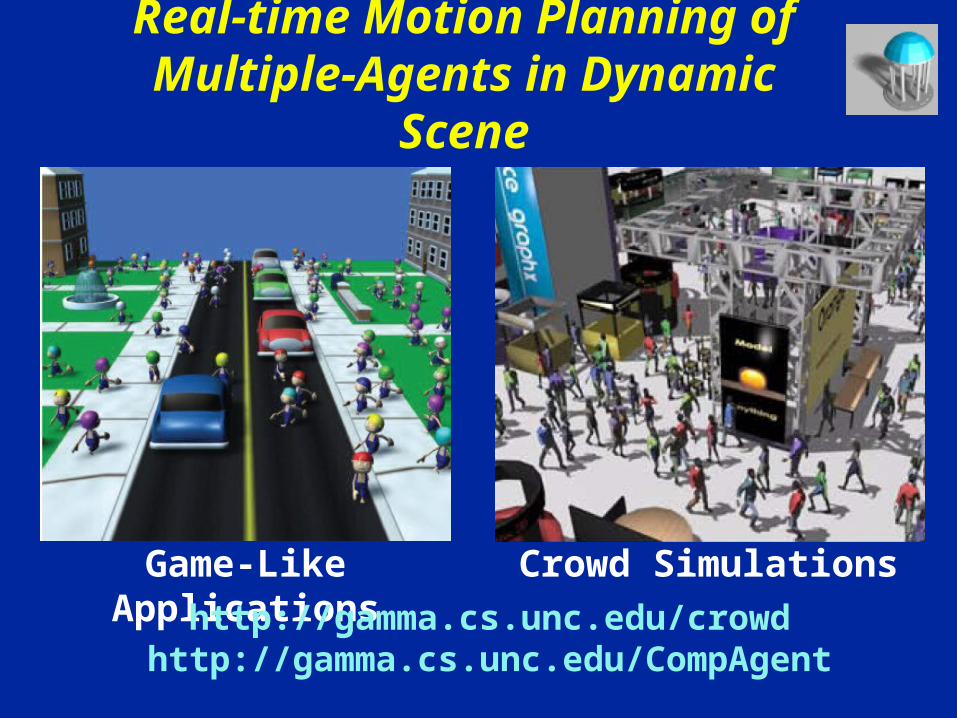
Real-time Motion Planning of Multiple-Agents in Dynamic Scene
Crowd SimulationsGame-Like Applications
http://gamma.cs.unc.edu/crowdhttp://gamma.cs.unc.edu/CompAgent
Research Challenges
• Planning of multiple flexible robots
• Planning with additional constraints (e.g. visibility, distance, etc)
• Real-time controller+planner using graphics hardware (GPU) or multi-core architecture for model acquisition
• Incorporation of direct human interaction
• Applications to character animation, crowd simulations, and behavior planning of avatars

System Demonstrations
Check out the video clips & papers athttp://gamma.cs.unc.edu/planning
And
Demos in G-Lab tonight!!!
Current Research Interests
• Physics-Based Modeling, Simulation and Animation
• Robot Algorithms in Physical World and Virtual Environments
• Multi-sensory Interaction & Applications
• General Purpose Computing on GPUs
• Rendering Acceleration Techniques for Massive Models
• Geometric and Solid Modeling
Multi-Sensory Interaction
http://gamma.cs.unc.edu/Sound
http://gamma.cs.unc.edu/symphony
http://gamma.cs.unc.edu/SoundingLiquids
http://gamma.cs.unc.edu/dab/
Technology Transfer• CAD/CAM & Engineering Simulation:
MDI/Adams, Knowledge Revolution, etc.
• Computer Animation/Human Modeling: Jack® (UPENN), Transom Technology/EAI
• Virtual Prototyping & VEs: Division, Prosolvia, AmadaSoft, Ford, etc.
• Robotics & Automation: Kawasaki
• Interactive Games: Intel & ISV’s, Blaxxun
• Medical Simulation: ADAC Lab

Collaborators
• Robotics: HRL, Stanford University
• Interactive Games: Intel & ISVs
• Haptics: SensAble, Immersion, etc.
• Virtual Prototyping: Boeing, Ford, Sandia, etc.
RA Work
• Under the supervision of advisors,– Research and understand existing work– Design and implement new algorithms – Test resulting systems on compelling
applications and show the validity of the proposed approaches
– Write papers and submit them to top conferences and journals
Required Background
• Physically-based Modeling
• Dynamic Simulation
• Computer Animation
• Robot Motion Planning
• Haptics

Supporting Field of Study
• Graphics & User Interface
• Computational Geometry
• Geometric & Solid Modeling
• Numerical Analysis
• Physics & Mechanics
• Robotics