physik fu¨r ingenieure · skript zur vorlesung physik fu¨r ingenieure bauingenieurwesen sales...
TRANSCRIPT

Skript zur Vorlesung
Physik fur Ingenieure
BauingenieurwesenSales Engineering and Product ManagementUmwelttechnik und Ressourcenmanagement
Wintersemester 2007/2008
Prof. Dr. Andreas Meyer
Institut fur Materialphysik im WeltraumDeutsches Zentrum fur Luft- und Raumfahrt Koln
und
Lehrstuhl fur Materialphysik im WeltraumFakultat fur Physik und Astronomie
Ruhr-Universitat Bochum
Inhaltsverzeichnis
1 Einfuhrung, Messung von Großen 11.1 Messung und Messfehler . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 21.2 Zeitmessung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . 31.3 Langenmessung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . 4
2 Klassische Mechanik 52.1 Kinematik des Massepunktes . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . 5
2.1.1 Bahnen und Koordinationssysteme . . . . . . . . . . . . . . . . .. . . . . . . . . . . . 52.1.2 Geschwindigkeit und Beschleunigung . . . . . . . . . . . . . .. . . . . . . . . . . . . 52.1.3 Superpositionsprinzip . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 6
2.2 Dynamik des Massepunktes . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 72.2.1 Trage und schwere Masse . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . 72.2.2 Reibungskrafte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . 8
2.3 Arbeit, Energie, Impuls . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . 92.3.1 Arbeit und Leistung . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . 92.3.2 Energie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 102.3.3 Energieerhaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . 102.3.4 Impuls und Impulserhaltung . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 10
2.4 Mechanik starrer Korper . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . 122.4.1 Drehmoment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 122.4.2 Rotationsenergie und Tragheitsmoment . . . . . . . . . . .. . . . . . . . . . . . . . . 122.4.3 Drehimpuls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . 132.4.4 Rotationsbewegung . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . 14
2.5 Mechanik deformierbarer Korper . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . 152.5.1 Spannung und Dehnung . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 152.5.2 Ruhende Flussigkeiten und Gase . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . 152.5.3 Stromung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . 172.5.4 Viskositat und Reibung . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 19
2.6 Schwingungen und Wellen . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 202.6.1 Erzwungene Schwingung und Resonanz . . . . . . . . . . . . . . .. . . . . . . . . . . 202.6.2 Gekoppelte Oszillatoren . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 202.6.3 Fortschreitende Wellen . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 202.6.4 Dopplereffekt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . 222.6.5 Uberlagerung von Wellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 232.6.6 Wasserwellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 24
3 Optik 253.1 Eigenschaften von Lichtstrahlen . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . 253.2 Reflexion und Brechung . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . 26
3.2.1 Reflexion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 263.2.2 Brechung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . 27
3.3 Optische Abbildungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . 273.3.1 Hohlspiegel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 273.3.2 Prisma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 283.3.3 Linse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 283.3.4 Menschliches Auge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . 29
3.4 Wellenoptik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . 313.4.1 Interferenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . 313.4.2 Beugung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . 333.4.3 Teilchenstrahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . 34
1 Einfuhrung, Messung von Großen
Physik ist eine Wissenschaft, die sich mit der um-gebenden Welt, deren Grundbausteinen und Wechsel-wirkungen beschaftigt.
Physik ist eine Erfahrungswissenschaft, die auf expe-rimentell gefundenen Tatsachen beruht.Dabei gilt: Tatsachen bleiben, Deutungen wechselnim Laufe des historischen Fortschritts.
Erkenntnisprozess:
Experiment, Beobachtung↓
ModellvorstellungMathematische Beschreibung
↓Physikalische Theorie
↓Gesetzmaßigkeiten, Vorhersagen
↓Experiment
Ziel physikalischer Forschung:
– Gesetzmaßigkeiten und Zusammenhange in Na-turphanomenen aufzeigen
– Beschreibung und Erklarung aller Naturphano-mene durch wenige Grundprinzipien
– Verstehen→Abbau vonAngsten, (Weiter-) Ent-wicklung von Anwendungen
Experimente sind gezielte Fragen an die Natur
Geeignete experimentelle Anordnung liefert eindeu-tige Antworten.Dabei muss gelten:Wiederholbarkeit→ Naturgesetze mussen unabhangig sein vom Expe-rimentator oder vom Versuchsaufbau.
Durch Experimente kann der Gultigkeitsbereich vonTheorien uberpruft werden. Dabei gilt: Theorien kon-nen nicht bewiesen, sondern nur widerlegt werden.
Griechische Naturphilosophie
Weltbild des Aristoteles (384-322 v. Chr.)
– Einteilung der Wissenschaft in:Physik→ korperliche, materielle WeltMetaphysik→ ideelle, geistige Welt
– Erklarung physikalischer Erscheinungen durchdie Annahmen:
- Erde im Zentrum der Welt
- Vier Elemente (Feuer, Wasser, Luft, Erde)+ gottliches Element (Ather)
- Bewegung: Versuch eines Stoffes, seinennaturlichen Ort im Universum zu erreichen
– Vorstellung falsch, aber:
- Entmythologisierung der Natur(z.B. Erklarung der Sonnenfinsternis)
- Funktionierende Anwendungenz.B. Archimedes (287-212 v. Chr.):Schwerpunkt, Hebelgesetz, Auftrieb
Entwicklung der klassischen Physik
Beginn der experimentellen Physik mit Galileo Galilei(1564 - 1642)
– Untermauern physikalischer Hypothesen durchgezielte Experimente (siehe Fallgesetze)
– Experiment als Prufstein jeder Theorie
Einfuhrung der Mathematik in die Physik durch IsaacNewton (1642-1727)
– Zusammenfassung vieler Einzelergebnisse in ei-ne Gleichung
– Erstes verallgemeinertes Naturgesetz:~F = m~a
Ende des 19. Jahrhunderts: Alle bekannten physikali-schen Probleme scheinen gelost. Man glaubt sich nahean einem geschlossenen Weltbild.
Aber neue Experimente erzwingen Erweiterungen derklassischen Physik, z.B.:
– Michelson Experiment (1881):Lichtgeschwindigkeitc ist eine Konstante undunabhangig von Bewegung des Messgerates.→ Spezielle Relativitatstheorie (1905 Einstein)
– Entwicklung der Spektralanalyse(Kirchoff 1824-1887, Bunsen 1811-1899):Emission/Absorption charakteristischer Wellen-langen von Atomen→Ansatze der Quantentheorie (um 1900) durchMax Planck (1858-1947)
1
Heutiges physikalisches Weltbild:
Kondensierte Materie (fest, flussig)↑
Atome, Molekule↑
Atomkerne (Protonen, Neutronen)↑
Quarks
Vier fundamentale Wechselwirkungen:
Starke WW (Gluonen)Schwache WW (W-, Z- Boson)Elektromagnetische WW (Photonen)Gravitaions WW (Gravitonen)
Als gute Naherung gilt:groß, langsam→ klassische Mechanikklein → Quantenmechanikschnell→ Relativitatstheorie
1.1 Messung und Messfehler
Messung:Quantitative Bestimmung einer physikalischen Großedurch Vergleich mit Normgroßen (Standards)
Beispiel: Waage (Urkilogramm als Normgroße)
Urkilogramm: Metallzylinder mit 139 mm Hohe und39 mm Durchmesser aus einer Platin-Iridium Legie-rung. Festlegung (1889): 1 kg entspricht der Massedes Urkilogramms
Eine gemessene Große setzt sich zusammen aus:
Zahlenwert, MessfehlerundMaßeinheit
a) Messfehler:
– Systematische Fehler: Z.B. Fehler im Versuchs-aufbau, fehlerhafte Eichung des Messgerates,Nichtberucksichtigung von außeren Einflussen
– Statistische Fehler: Z.B. schwankende Versuchs-bedingungen, Ablesegenauigkeit
Im Gegensatz zu systematischen Fehlern steigt die Ge-nauigkeit einer Messung mit der Anzahl der Wieder-holungenN . Der Arithmetischer Mittelwert x derMessgroßex ist:
x =1
N
N∑
i=1
xi
Das Maß fur die Genauigkeit einer Messung ist dieStandardabweichungσ(x):
σ(x) =
√
√
√
√
1
N − 1
N∑
i=1
(xi − x)2
σ(x) ist der mittlere Fehler der Großexi der Einzel-messung.Der mittlere Fehler des Mittelwertesx ist:
σ(x) =σ(x)√
N=
√
√
√
√
1
N(N − 1)
N∑
i=1
(xi − x)2
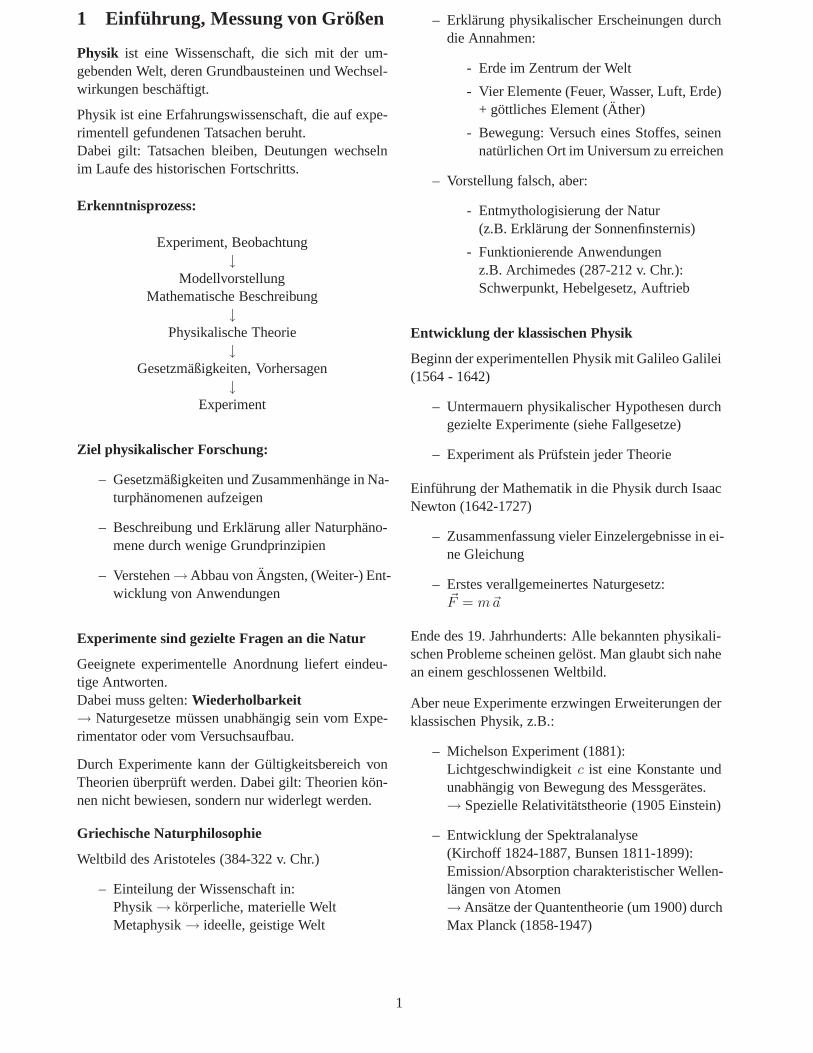
Bei statistischen Fehlern ergeben die Einzelmessun-gen beiN � 1 eine Gauß-VerteilungP (xi) um denwahren Wert xw, d.h. in diesem Fallxw = x:
P (xi) =1
√
2πσ2(x)exp
[
− (xi − xw)2
2σ2(x)
]
Dabei liegen∼ 68% aller Messwertexi im Bereichvon± σ(x) und∼95% innerhalb von± 2σ(x)
Hangt eine Große von anderen Großenx, y, z ... ab,die statistisch unabhangig gemessen werden, dann giltdasGauß’sche Fehlerfortpflanzungsgesetz:
σ(G) =
√
σ2(x)
(
∂G
∂x
)2
+ σ2(y)
(
∂G
∂y
)2
+ ...
Beispiel: Geschwindigkeit:v = l/t:
σ(v) =
√
σ2(l)
(
∂v
∂l
)2
+ σ2(t)
(
∂v
∂t
)2
σ(v) =
√
σ2(l)1
t2+ σ2(t)
(−l
t2
)2
In der Regel gibt man das Ergebnis einer Messung mitdemVertrauensbereich von ±σ an:
xw = x ± σ(x)
2
b) Maßeinheiten
Zuruckfuhrung physikalischer Maßeinheiten auf we-nigeBasiseinheitenmit genauenMessvorschriften
→ SI Maßsystem(Syteme International d’Unites)
Alle anderen Einheiten wie Kraft [kg m s−2 ≡ N](Newton) oder Energie [kg m2 s−2 ≡ J] (Joule) kon-nen aus den Basisgroßen abgeleitet werden.
Große SI Einheit Symbol
Zeit Sekunde sLange Meter mMasse Kilogramm kgTemperatur Kelvin KStoffmenge Mol molelektr. Stromstarke Ampere ALichtstarke Candela cd
Dabei konnen Candela und Ampere uber Sekunde,Meter und Kilogramm, das Mol uber Kilogramm undder Meter uber Sekunde ausgedruckt werden. Nur Ki-logramm, Sekunde und Kelvin sind unabhangig vonanderen Basiseinheiten definiert.
In der Praxis finden noch andere Einheitssysteme Ver-wendung:
1 J = 6.2419 · 1018 eV (Atom/Festkorperphysik)1 J = 2.3884 · 10−4 kcal (Chemie)1 J = 2.7778 · 10−7 kWh (Elektrotechnik)1 J = 107 erg (Theorie: cgs System)
c) Großenordnungen
Basiseinheiten konnen extrem variieren, z.B. fur ato-mare oder kosmologische Effekte⇒ SI Vorsatze
Faktor Vorsilbe Kurzzeichen
10−1 Dezi- d10−2 Zenti- c10−3 Milli- m10−6 Mikro- µ10−9 Nano- n10−12 Piko- p10−15 Femto- f10−18 Atto- a
101 Deka- da102 Hekto- h103 Kilo- k106 Mega- M109 Giga- G1012 Tera- T1015 Peta- P1018 Exa- E
1.2 Zeitmessung
Zeitmessung erfolgt uber periodische Vorgange, de-ren PeriodeT moglichst konstant ist. Zeit ist dann dieZahl der Perioden zwischen zwei Ereignissen mal derPeriodeT .
Astronomische Vorgange(Jahr, Monat, Tag):Ab 1960: Definition der Sekunde durch Umlauf derErde um die Sonne. Genauigkeit: 1 s±10−9 s (1 ns)
Hohere Genauigkeit durch Anbindung anperiodischeVorgange von Atomen
Heute: Definition der Sekunde uber Hyperfeinaufspal-tung im Casium Isotop133Cs:
1 s≡ 9192631770 Schwingungen des CsUberganges
Erreichte Genauigkeit: 1 s±10−15 s (1 fs)
Radioaktiver Zerfall : Messung von Zeitspannen von10−9 s bis109 a:
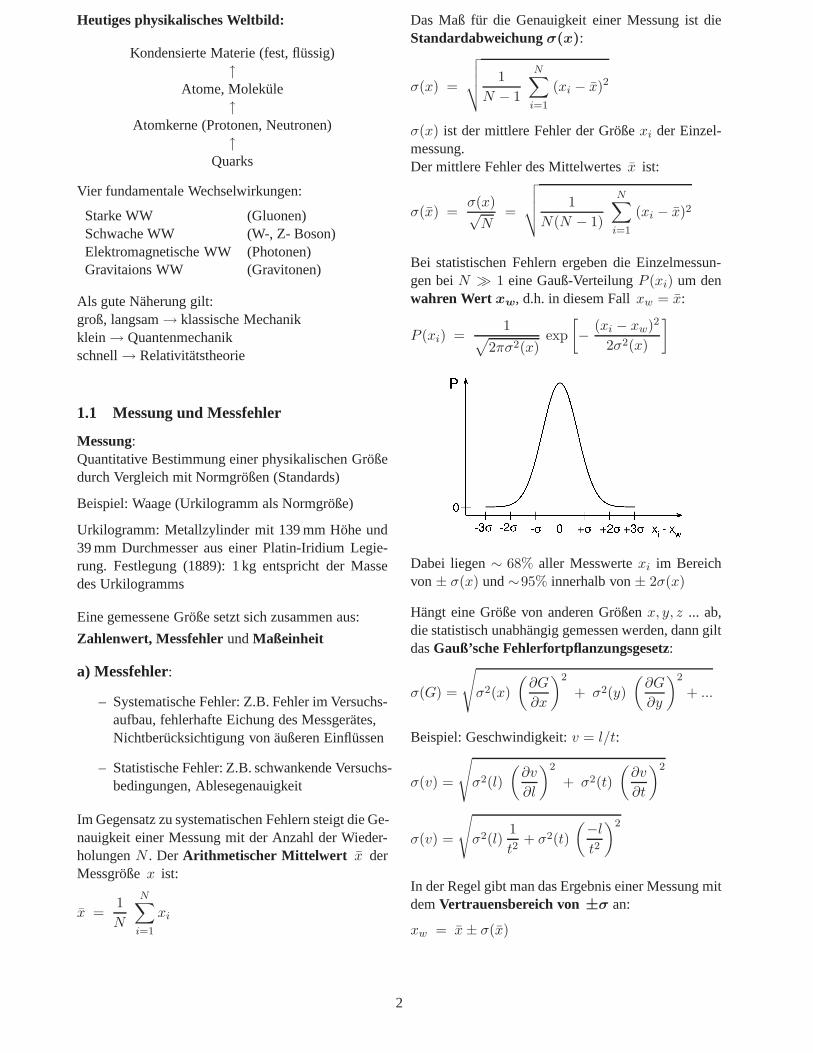
Versuch:Radioaktiver Zerfall als Zeitmesser
Zerfallsprodukt137Ba aus137Cs Quelle mit Salzsaureauswaschen. Messung der Aktivitat durch Messungder Anzahl der ausgesandtenγ - Quanten (Energie:0.661 MeV) mittels eines Geiger-Muller-Zahlrohres in30 s Intervallen.AnfangsaktivitatN0 im Versuch ca.105 Bq (Becque-rel: Zerfalle pro Sekunde)
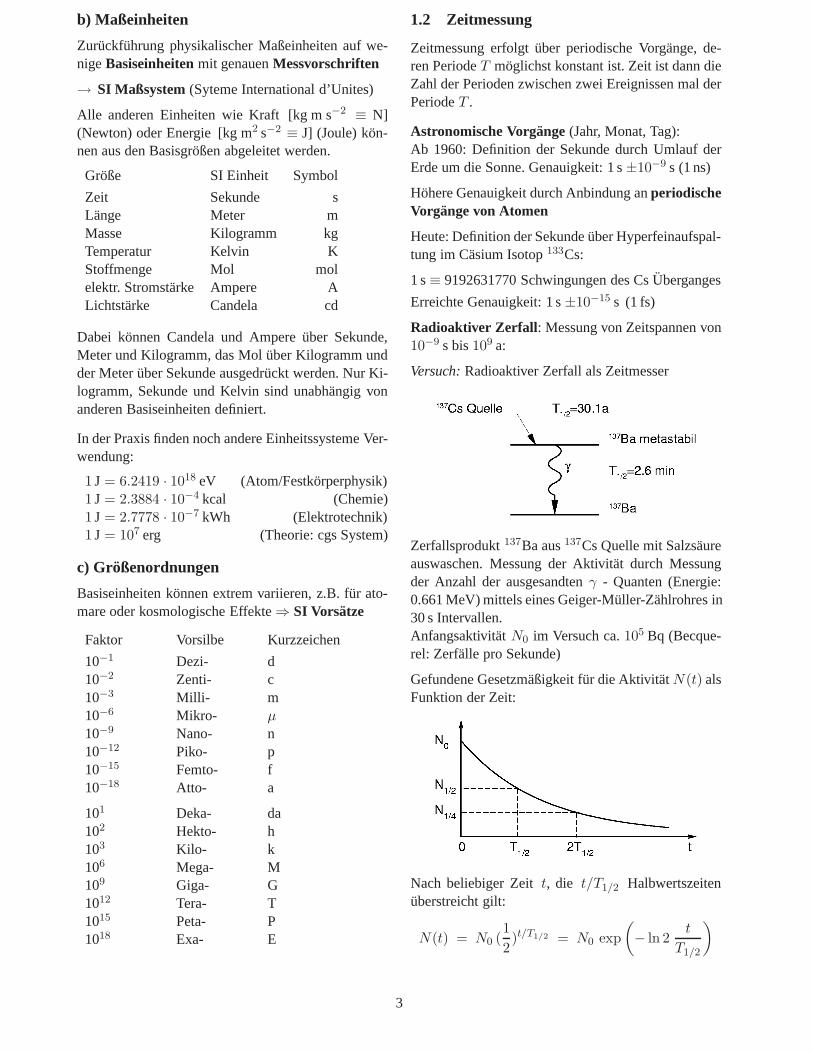
Gefundene Gesetzmaßigkeit fur die AktivitatN(t) alsFunktion der Zeit:
Nach beliebiger Zeitt, die t/T1/2 Halbwertszeitenuberstreicht gilt:
N(t) = N0 (1
2)t/T1/2 = N0 exp
(
− ln 2t
T1/2
)
3
Mit der mittleren Lebensdauer:τ ≡T1/2
ln 2
⇒ Zerfallsgesetz: N(t) = N0 exp (−t/τ)
Zahl der KernedN , die im Zeitintervall zwischentunddt zerfallen:
dN = N(t + dt) − N(t) =dN
dtdt
mitdN
dt= −1
τN0 exp(−t/τ)
⇒ dN = −1
τN(t) dt
Zahl der Kerne, die pro Zeiteinheit zerfallt ist propor-tional zur Zahl der vorhandenen radioaktiven Kerne.
Anwendung: Z.B. Archaologische Altersbestimmungmit der14C Methode:
14C bildet sich kontinuierlich in den oberen Schichtender Atmosphare durch Neutronenbestrahlung.Dadurch: Zeitlich konstante Menge an14C im CO2
der Luft→ N0
Beim Absterben von Lebewesen, kein weiterer Aus-tausch mit der Luft,14C - Gehalt nimmt durch radio-aktiven Zerfall mit HalbwertszeitT1/2 = 5770 a ab.
⇒ Altersbestimmung kohlenstoffhaltiger Lebewesenim Bereich von 500 a bis∼ 50000 a
1.3 Langenmessung
Historische Langeneinheiten:Korpermaße (z.B. USA 1 inch = 1/12 foot = 2.54 cm)
1875 Definition des Meters:1 m≡ 10−7 mal Strecke Nordpol-Aquator uber ParisUrmeter in Paris: Pt-Jr-Stab bei0◦C, markiert durchRitzen→ Genauigkeit 1 m±10−6 m (1µm).
Ab 1983: Definition des Meters durch die Strecke, dievon Licht im Vakuum in1/299792458 s durchlaufenwird. Lichtgeschwindigkeit:c = 2.99792458·108 m/sErreichte Genauigkeit:10−10 m
Methoden zur Langenmessung:
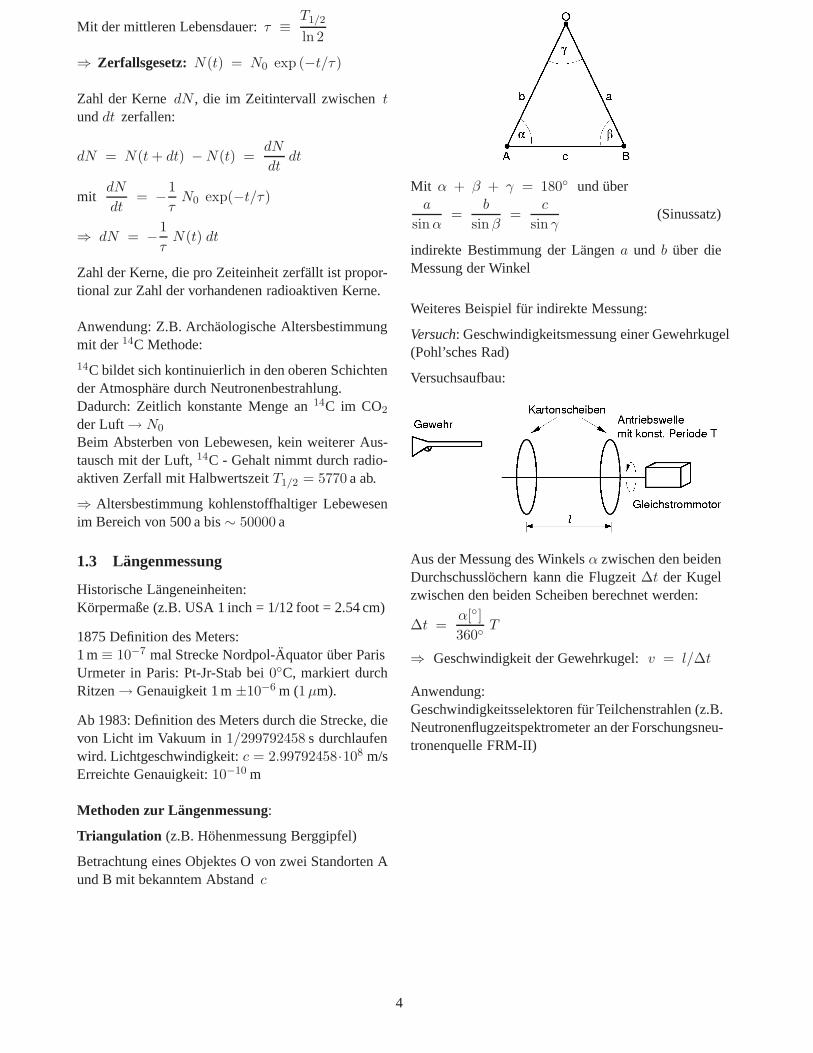
Triangulation (z.B. Hohenmessung Berggipfel)
Betrachtung eines Objektes O von zwei Standorten Aund B mit bekanntem Abstandc
Mit α + β + γ = 180◦ und ubera
sin α=
b
sin β=
c
sin γ(Sinussatz)
indirekte Bestimmung der Langena und b uber dieMessung der Winkel
Weiteres Beispiel fur indirekte Messung:
Versuch: Geschwindigkeitsmessung einer Gewehrkugel(Pohl’sches Rad)
Versuchsaufbau:
Aus der Messung des Winkelsα zwischen den beidenDurchschusslochern kann die Flugzeit∆t der Kugelzwischen den beiden Scheiben berechnet werden:
∆t =α[◦]
360◦T
⇒ Geschwindigkeit der Gewehrkugel:v = l/∆t
Anwendung:Geschwindigkeitsselektoren fur Teilchenstrahlen (z.B.Neutronenflugzeitspektrometer an der Forschungsneu-tronenquelle FRM-II)
4
2 Klassische Mechanik
Beschreibung der Bewegung punktformiger oder aus-gedehnter Korper unter dem Einfluss von Kraften
Zunehmende Komplexitat:
- Kinematik von Massepunkten als Funktion derZeit (Wie bewegt sich ein MP?)
- Dynamik des MP (Warum bewegt sich ein MPso wie er sich bewegt?→ Krafte)
- Teilchensysteme
- Starre ausgedehnte Korper
- Deformierbare Korper
2.1 Kinematik des Massepunktes
Ein Korper der Massem lasst sich modellhaft durcheinen Massepunkt beschreiben, wenn seine raumlicheAusdehnung fur die Beschreibung seiner Bewegungkeine Rolle spielt.
2.1.1 Bahnen und Koordinationssysteme
Beschreibung der Bewegung eines Massepunktes zurZeit t mit Hilfe des Ortsvektors~r.Die Funktion~r(t) ist die Bahnkurve des Massepunk-tes, die er im Laufe der Zeit durchlauft.
Im kartesischen Koordinatensystemist
~r(t) = x(t) ~ex + y(t) ~ey + z(t) ~ez
~ex ⊥~ey ⊥~ez → Einheitsvektoren mit|~ei| = 1
(Rechte-Hand-Regel)
Sinnvolle Wahl des Ursprungs0 und der Richtungen(~ex oder~ey oder~ez) → Verringerung der Dimensio-nalitat der Bahnkurve~r(t).Z.B. freier Fall:
~r(t) =
x(t)y(t)z(t)
3dim → ~r(t) = y(t)~ey 1dim
Als Bewegung bezeichnet man dieAnderung des Or-tes mit der Zeit, beurteilt von einem ortsfesten, starrenKorper, demBezugssystemaus. Z.B. Fußboden desHorsaals (Vernachlassigung der Erdrotation)
Verschiebung oder Rotation des Koordinatensystemsbzw. eineAnderung des Bezugssystems darf nicht da-zu fuhren, dass die Bahnkurve anderen physikalischenGesetzmaßigkeiten folgt.
Je nach geometrischen Eigenschaften der Bahnkurveist die Wahl anderer Koordinatensysteme sinnvoll:
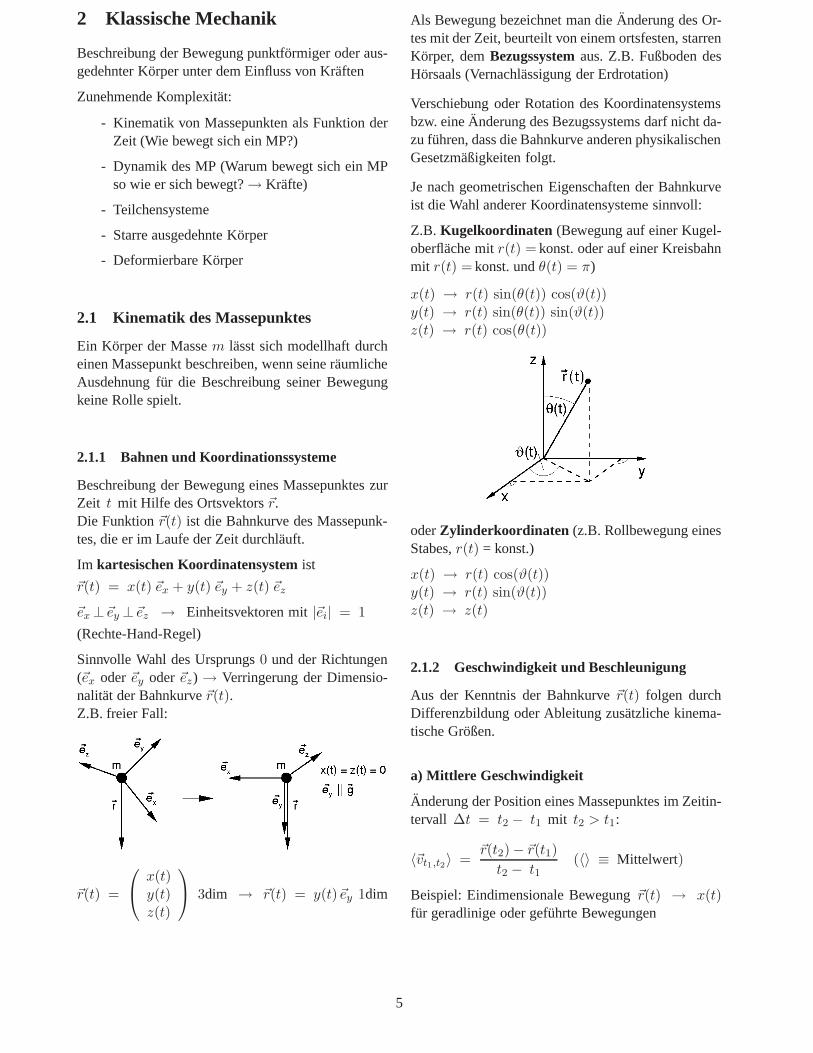
Z.B. Kugelkoordinaten (Bewegung auf einer Kugel-oberflache mitr(t) = konst. oder auf einer Kreisbahnmit r(t) = konst. undθ(t) = π)
x(t) → r(t) sin(θ(t)) cos(ϑ(t))y(t) → r(t) sin(θ(t)) sin(ϑ(t))z(t) → r(t) cos(θ(t))
oderZylinderkoordinaten (z.B. Rollbewegung einesStabes,r(t) = konst.)
x(t) → r(t) cos(ϑ(t))y(t) → r(t) sin(ϑ(t))z(t) → z(t)
2.1.2 Geschwindigkeit und Beschleunigung
Aus der Kenntnis der Bahnkurve~r(t) folgen durchDifferenzbildung oder Ableitung zusatzliche kinema-tische Großen.
a) Mittlere Geschwindigkeit
Anderung der Position eines Massepunktes im Zeitin-tervall ∆t = t2 − t1 mit t2 > t1:
〈~vt1,t2〉 =~r(t2) − ~r(t1)
t2 − t1(〈〉 ≡ Mittelwert)
Beispiel: Eindimensionale Bewegung~r(t) → x(t)fur geradlinige oder gefuhrte Bewegungen
5
〈v〉 =∆x(A,B)
∆t(A,B)
b) Momentane Geschwindigkeit
~v(t) = limt1→t
〈~vt,t1〉 =d~r
dt≡ ~r
– Die momentane Geschwindigkeit~r(t) zur Zeitt ist gegeben durch die Ableitung des Ortsvek-tors ~r(t) nach der Zeit.
– ~v(t) = (vx(t), vy(t), vz(t))
– Die Geschwindigkeit ist die Steigung der Kurvein einem Weg–Zeit–Diagramm.
– Dimension vonv [m/s]
c) Mittlere Beschleunigung
〈~at1,t2〉 =~v(t2) − ~v(t1)
t2 − t1
〈~at1,t2〉 =Geschwindigkeitsanderung
Zeitintervall
d) Momentane Beschleunigung
~a(t) = limt1→t
〈~at,t1〉 =d~v
dt≡ ~v =
d2~r
dt2≡ ~r
Dimension vona[
m/s2]
Versuch: Bewegung mit konstanter Beschleunigung
Ein Gleiter auf einer Luftkissenbahn gleitet reibungs-frei eine schiefe Ebene hinunter. Messung der Zeit undder Geschwindigkeit zwischen mehreren Lichtschran-ken als Funktion des Abstandesx vom Startpunktx0.Beobachtung:x ∝ t2 undv ∝ t
Konstante Beschleunigung fuhrt zu einer Geschwin-digkeitsanderung, die proportional zur Zeitt ist. Furdie Geschwindigkeit zur Zeitt ergibt sich:
v(t) = v0 + a t
Damit ergibt sich fur die zuruckgelegte Wegstreckezur Zeit t:
x(t) =
∫
dt v(t) =
∫
dt (v0 + a t)
⇒ x(t) = 12
a t2 + v0 t + x0
Die Integrationskonstantenv0 undx0 ergeben sich ausden Anfangsbedingungen.
Weg – Zeit – Diagramm
2.1.3 Superpositionsprinzip
Fur kinematische Vektoren (Ortsvektor~r, Geschwin-digkeit ~v, und Beschleunigung~a ) gilt die Vektorad-dition: D.h. die Bewegung in der einen Richtung hatkeinen Einfluss auf die Bewegung in den dazu senk-rechten Richtungen.
– Das Superpositionsprinzip ist unabhangig vonGroße und Richtung der Einzelvektoren und un-abhangig von der Reihenfolge der Addition.
– Das Superpositionsprinzip ist ein experimentel-ler Befund.
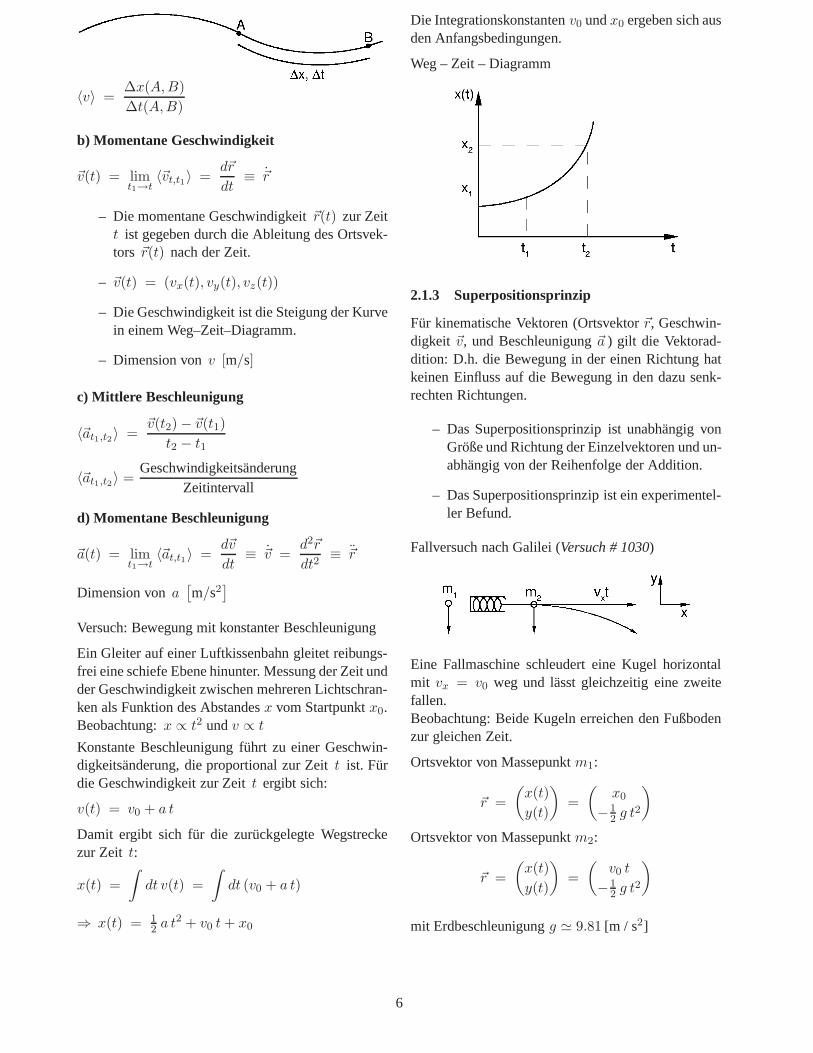
Fallversuch nach Galilei (Versuch # 1030)
Eine Fallmaschine schleudert eine Kugel horizontalmit vx = v0 weg und lasst gleichzeitig eine zweitefallen.Beobachtung: Beide Kugeln erreichen den Fußbodenzur gleichen Zeit.
Ortsvektor von Massepunktm1:
~r =
(
x(t)
y(t)
)
=
(
x0
−12g t2
)
Ortsvektor von Massepunktm2:
~r =
(
x(t)
y(t)
)
=
(
v0 t
−12g t2
)
mit Erdbeschleunigungg ' 9.81 [m / s2]
6

2.2 Dynamik des Massepunktes
Krafte als Ursache fur Bewegungsanderungen
Aufbauend auf den Experimenten von G. Galilei unddurch die Entwicklung der Differentialrechnung konn-te Newton um 1687 erstmals ein allgemeingultigesNaturgesetz formulieren.
Seine drei Axiome:
1) Jeder Korper behalt seinen Zustand der Ruheoder der gleichformig geradlinigen Bewegungbei, solange keine außeren Krafte auf ihn wir-ken:
~a = ~r = 0 fur ~F =∑
i
~Fi = 0
(Tr agheitsprinzip)
Versuch:Gedeckter TischBeobachtung: Tischtuch wird unter einem Ge-deck weggezogen. Ist die Reibungskraft zwi-schen Tuch und Gedeck vernachlassigbar bleibtdas Gedeck stehen.
Die Masse ist trage, sie mochte ihren Bewe-gungszustand nicht andern.
2) Die Beschleunigung eines Korpers ist indirektproportional zu seiner Masse und direkt propor-tional zur außeren Kraft:
~a =~F
moder ~F = m~a oder ~F = m~r
(Grundgleichung der Mechanik)
3) Krafte zwischen Korpern treten immer paarwei-se auf:
Ubt Korper A auf B die Kraft~FAB aus, so wirktB auf A mit ~FBA = −~FAB
(actio = reactio)
Kraft erzeugt Gegenkraft (Versuch)Beobachtung: Wenn eine Person auf einem Wa-gen eine zweite Person auf einem zweiten Wa-gen zu sich zieht, bewegen sich beide Wagenaufeinander zu.
– 1) ist der Sonderfall von 2) mit~F = 0
– 2) definiert einen linearen Zusammenhang zwischender Ursache~F und ihrer Wirkung~a
– Der Proportionalitatsfaktorm wird alstr age Massemt bezeichnet.
– Dimension der Kraft:[
kgms2
≡ N]
(Newton)
2.2.1 Trage und schwere Masse
– Die trage Massemt ist definiert durch das 2.Newton’sche Axiom:
mt = F/a
Tragheit gegenuber Geschwindigkeitanderung
– Die schwere Masse ist definiert durch die Gra-vitationskraftFG zwischen zwei Massen. Z.B.auf der Erdoberflache:
ms = FG/g
Beispiel: Auf dem Mond hat eine Eisenkugel etwa 1/6FG im Vergleich zur Erde. Um eine Kugel horizontalmit v0 zu werfen ist jedoch auf Mond und Erde diegleiche Kraft aufzubringen.
Aquivalenz vonmt und ms ?
Anwendung des 2. Newton’schen Axioms auf den frei-en Fall:
mt ~a = ~F = ms ~g ⇒ ~a =ms
mt~g
Beispiel: Freier Fall
Versuch mit Kugeln gleichem Durchmesser aber un-terschiedlichen Massen (Eisenkugel und Schaumstoff-kugel):
Beobachtung: Schaumstoffkugel fallt deutlich langsa-mer als Eisenkugel aufgrund der Luftreibung (syste-matischer Fehler).
Fallrohr evakuieren: Beobachtung: Fallzeitt unab-hangig von Masse und Form der Korper,h = g t2
fur Kugel und Feder
Wie genau giltms = mt ? Newton konnte mit einemFadenpendel zeigen, dassms/mt auf 10−3 konstantist.
Beispiel: Mathematisches Pendel
Ein Massepunktm ist an einem masselosen Faden derLange l aufgehangt, derm auf eine Kreisbahnx(t)zwingt.
Auf m wirkt die Gewichtskraft ~FG. Diese setzt sichzusammen aus den Teilkraften:
Radialkraft ~Frad und Tangentialkraft~Ftang
~Frad, ~Ftang: Reaktionskrafte auf Gewichtskraft~FG
~Frad ist senkrecht zur Bewegungsrichtung und hat da-her hat keinen Einfluss auf die Bewegung vonm.
⇒ mt a = mt x ; mt x = mt l ϕ (x = l ϕ)
7

Tangentialkraft:Ftang = −ms g sinϕ
Fur kleine Auslenkungen gilt:sinϕ ≈ ϕ
⇒ mt l ϕ = −ms g ϕ
Bewegungsgleichung:ϕ = −ms
mt
g
lϕ
Losungsansatz fur die Differentialgleichung:
ϕ(t) = ϕ1 sin(ωt + ϕ0)
mit maximaler Auslenkungϕ1 und Phaseϕ0
Mit Anfangsbedingung:ϕ(t=0) = ϕ1
⇒ ϕ0 = π2
ϕ(t) = ϕ1 ω cos(ωt + ϕ0) (ϕ(t=0) = 0)
ϕ(t) = −ω2 ϕ1 sin(ωt + ϕ0)
= −ms
mt
g
lϕ1 sin(ωt + ϕ0) aus Bwgl.
⇒ Kreisfrequenzω =
√
ms
mt
g
l
⇒ ϕ(t) ist periodisch inωt mit der Periode:
T =2π
ω= 2π
√
mt
ms
l
g
Z.B. fur ein Sekundenpendel:l = 0.2484 m
Fur mt = ms hangt Bewegung eines Fadenpendelsnicht von der Masse ab (Versuch).
Vergleich der PeriodenT fur Pendelschwingungenunterschiedlicher Massen bei konstanteml:
⇒ Konstanz vonms/mt auf 10−12 Genauigkeit
2.2.2 Reibungskrafte
Reibungskrafte verursachen Bewegungsanderungen. Rei-bung fuhrt u.a. dazu, dass:
– Bewegungen langsamer werden– Schwingungen gedampft werden
Reibung zwischen Korpern entsteht in ihrer Beruh-rungsflache. Ursachen:
– Mikroskopische Struktur der beiden Oberflachen(Rauhigkeit)
– Wechselwirkung zwischen den Atomen/Molekulender beiden Oberflachen
Man unterscheidet zwischen Haftreibung und Gleit-reibung:
Da sich durch die Bewegung der mittlere Abstand zwi-schen Korper und Unterlage im zeitlichen Mittel leichtvergroßert, ist die HaftreibungszahlµH in der Regelgroßer als die GleitreibungszahlµG (Versuch).
Wird ein Korper mit der Normalkraft~FN auf eineUnterlage gedruckt, so muss eine außere Kraft~Fext
tangential zur Unterlage aufgebracht werden, um denKorper zu verschieben, die großer ist als dieHaftrei-bungskraft ~FH:
|~FH | = µH |~FN |
Fur dieGleitreibungskraft ~FG gilt analog:
|~FG| = µG |~FN |
Die Reibungszahlen hangen von Materialart und Ober-flachenbeschaffenheit ab (Versuch).Dabei nimmtµG mit zunehmender Geschwindigkeitab (Vgl. Bewegung von Korpern in Flussigkeiten undGasen).
Die Reibungszahlen hangen nicht von der Große derOberflache ab. D.h., dass die Reibungskraft direkt pro-portional zur NormalkraftFN ist (Versuch).
8

– Reibung erzeugt Warme (irreversibel)⇒Reibungskrafte sinddissipative Krafte.
– Verringerung von Haft- und Gleitreibung durchSchmiermittel
Zahlenwerte µH µG
Stahl/Stahl (trocken) 0.15 0.12Stahl/Stahl (geschmiert) 0.13 0.01Gummi/Asphalt (trocken) 0.55 0.30Gummi/Asphalt (nass) 0.20 0.15Gummi/Eis < 0.1 0.05
Beispiel: Schiefe Ebene
Gewichtskraft |~FG| = m g zerlegt in
Normalkraft |~FN | = m g cos ϕ und
Abtriebskraft |~FAB| = m g sin ϕ
⇒ Reibungskraft |~FR| = µH,G |~FN | (|~FR| = FR)
– Fur FAB < µH FN : Korper bewegt sich nicht
– Fur FAB = µH FN
⇒ m g sin ϕc = µH m g cos ϕc
Bestimmung der HaftreibungszahlµH aus Mes-sung des kritischen Winkelsϕc:
µH =sin ϕc
cos ϕc= tan ϕc
– Fur FAB > µH FN > µG FN : Korper gleitet
Bwgl. unter der Annahme, dassµG = konst.:
m a = FAB − FR
m a = m g sin ϕ − µG m g cos ϕ
⇒ a = g (sin ϕ − µG cos ϕ)
D.h. der Korper bewegt sich mit konstanter Be-schleunigung die schiefe Ebene hinunter.
Aus Messung vona Bestimmung vonµG
2.3 Arbeit, Energie, Impuls
Uber Newton’sche Bewegungsgleichung und actio =reactio→ quantitative Behandlung aller Bewegungen(Anwendung: Molekular Dynamik Simulation)Komplizierte Bewegungen→ hoher Rechenaufwand⇒ Einfuhrung von Hilfsgroßen: Arbeit, Energie undImpuls.Dabei sind Arbeit und Energie skalare Großen, die ausder Bahnkurve~r(t) durch Integration folgen.
2.3.1 Arbeit und Leistung
Begriff Arbeit stammt aus der Mechanik einfacher Ma-schinen (Hebel, Flaschenzug).
Arbeit ist das Produkt “Kraft in Richtung des Wegesmal Weg”:
W12 =
~r2∫
~r1
~F (~r ) · d~r
Dabei gilt:
– W ist positiv, wenn die Kraft eine Komponen-te in Wegrichtung hat. D.h. die Kraft verrichtetArbeit.
– W ist negativ, wenn die Kraft eine Komponen-te entgegengesetzt der Wegrichtung hat. D.h. eswird gegen die Kraft Arbeit verrichtet.
– Dimension[N m = kg m2s−2 ≡ J] (Joule)
Beispiel: Hubarbeit im Schwerefeld der Erde
~F = m~g = −m g~ez und dW = −m g dz
⇒ W (h) =
h∫
0
−m g dz = −m g h
D.h. die HubarbeitW ∝h ist unabhangig vom Weg.
9

Fur Bewegung inx, y - Richtung mit ~F ||~ez gilt:
(d~r = dx~ex + dy ~ey + dz ~ez)
⇒ dW = ~F · d~r = −m g~ez · (dx~ex + dy ~ey) = 0
(~ei · ~ej = 0)
Fallt der Korper aus der Hoheh auf die Erde, danngilt : W > 0
W =
0∫
h
−m g dz = m g h
Leistung ist verrichtete Arbeit pro Zeitintervall:
P ≡ dW
dt
dW = ~F · d~r = ~F · ~v dt
⇒ P =dW
dt= ~F · ~v
[
Js
=kg m2
s3≡ W
]
(Watt)
Zahlenbeispiel: Student, 70 kg, springt in 3 s eine 6 mhohe Treppe hinauf. Dabei ist seine Leistung:
70 kg 9.81 ms−2 6m/3s≈ 1.4 kW
Z. Vgl.: Großkraftwerk> 1 GW, KFZ: 1 PS = 735 W
2.3.2 Energie
Energie ist die Fahigkeit eines Korpers, Arbeit zu leis-ten. In der klassischen Mechanik gibt es drei Formenvon Energie:
– Potenzielle EnergieEpot: Nur abhangig vonden relativen Positionen(~ri − ~rj) der Korper
– Kinetische Energie Ekin: Nur abhangig vonGeschwindigkeitv und Massem der Korper
– WarmeQ: Mikroskopische Bewegung der Ato-me in einem Korper (innere Energie)
Durch verschiedene Krafte der Mechanik kann uberdie entsprechende Arbeit Energie von einer Form ineine andere Form umgewandelt werden.
Versuch: Tanzende StahlkugelEine Stahlkugel wird auf eine Glasplatte fallengelas-sen: Sie springt fast wieder in ihre Ausgangspositionzuruck (Epot → Ekin → Epot).Bleiplatte anstelle der Glasplatte: Die Stahlkugel hin-terlasst einen Abdruck in der Bleiplatte und springtkaum wieder hoch (Epot → Ekin → Q).
Definition von elastisch:Erfullung des mechanischenEnergiesatzes (Epot +Ekin = konst.) bei Verformung
2.3.3 Energieerhaltung
Aus der Integration der Grundgleichung~F = m~afolgt:
~r2∫
~r1
~F · d~r = W12 = −∆Epot(~r1, ~r2) =
~r2∫
~r1
m~a · d~r
= 12
m v2(~r2) − 12m v2(~r1)
= ∆Ekin(~r1, ~r2)
⇒ ∆Epot + ∆Ekin = 0
⇒ Energie(erhaltungs)satz der Mechanik
Epot(~r ) + Ekin(~r ) = E = konst.
In der Regel wird immer ein Teil der kinetischen Ener-gie in Warme umgewandelt.
Damit ergibt sich derverallgemeinerte Energiesatz:
Q12 = ∆Epot + ∆Ekin = ∆E
Die von dissipativen KraftenFR verrichtete ArbeitQist gleich derAnderung∆E der Gesamtenergie einesKorpers.
2.3.4 Impuls und Impulserhaltung
Das Wegintegral der Kraft, die Arbeit (∫
~F · d~r), isteine skalare Große.
Das Zeitintegral der Kraft (∫
~Fdt) heißt Kraftstoß undfuhrt zum Impuls~p (vektorielle Große). Der Impulseines Korpers ist definiert als das Produkt seiner Mas-se und seiner Geschwindigkeit:
~p ≡ m~v Dimension [kg m s−1]
Ein Kraftstoß∫
~F dt andert den Impuls eines Korpers:
Wahrend jedes Zeitabschnittesdti wirkt die Kraft ~Fi
= m~ai auf den Korper. Die Beschleunigung erzeugtin dti eine Geschwindigkeitsanderung.
Mit ~F = m~a = md~v
dt=
d (m~v)
dt=
d~p
dt
ist die auf ein Teilchen wirkende Kraft gleich der zeit-lichenAnderung seines Impulses~p. Dabei giltma =d(m v)/dt nur wenn die Masse zeitlich konstant ist.
N.B. p = d(m v)/dt gilt auch in der relativistischenMechanik, jedoch mit Massem = m0 /
√
1 − v2/c2
(m0: Ruhemasse,c: Lichtgeschwindigkeit)
10

Versuch: Zwischen zwei ruhenden Wagen der MassenM und m befindet sich eine gespannte Feder:
Gibt ein Ausloser die Wagen frei, erhalten beide Wa-gen Kraftstoße gleicher Große, aber entgegengesetz-ter Richtung (actio = reactio).⇒ Wagen erhalten Impulse gleicher Große, aber ent-gegengesetzter Richtung.
M ~v1 = −m~v2 ; M ~v1 + m~v2 = 0
⇒∑
i
~pi = 0
Der Gesamtimpuls bleibt konstant (~pg = 0).
Versuch:Wagen mit Laufbrett
1) Geht man vom Boden aus mit konstanter Geschwin-digkeit uber das Laufbrett, bleibt der Wagen stehen.2) Geht man vom Boden aus auf das Laufbrett undbleibt auf dem Brett stehen, rollt der Wagen samt Ver-suchsperson.3) Verlasst man dann den ruhenden Wagen, rollt derWagen in entgegengesetzter Richtung davon.
Allgemeiner Satz der Impulshaltung:
In einem abgeschlossenen System, fur das gilt~Fext =0 , bleibt der Gesamtimpuls zeitlich konstant.
Fur ~Fext = 0 ⇒ mg~Rs = 0 ⇒ mg
~Rs − ~konst.= 0
⇒ ~pg ≡ mg~Rs =
∑
i
mi ~ri =∑
i
~pi = ~konst.
Versuch: Ballistisches Pendel
Bestimmung der Geschwindigkeit einer Gewehrkugelder Massem1 durch Messung der Auslenkung einesHolzkorpers der Massem2, der an einem Fadenpen-del hangt (Kugel bleibt stecken)
v1e = v2e (Ekin =0 im Schwerpunktsystem)
⇒ m1 v1a = (m1 + m2) v2e; v2e =m1
m1 + m2v1a
Eakin = 1
2m1 v2
1a
Eekin = 1
2(m1 + m2) v2
2e = 12
m21
m1 + m2
v21a
Energiebilanz beim Stoß:
Q = Eakin − Ee
kin = 12m1 v2
1a
(
1 − m1
m1 + m2
)
Fur m2 6=0 ist Eekin <Ea
kin → Umwandlung inQ
Nach dem Stoß wird im PendelEekin in potenzielle
Energie umgewandelt.
Mit h = l (1 − cos ϕ):
⇒ Epot = (m1 + m2) g h = 12
(m1 + m2) v22e
⇒ v1a =m1 + m2
m1
v2e ; v2e =√
2 g h
v1a =m1 + m2
m1
√
2 g h
Mit m1 =0.5 g, m2 =180 g, l=0.92 m und α≈10◦
⇒ v1a = 190 m/s (vgl. Pohl’sches Rad→ 1.3)
Q = Eakin
(
1 − m1
m1 + m2
)
= 0.997Eakin
D.h. der weitaus großte Teil der kinetischen Energieder Gewehrkugel wird beim Stoß in Warme umge-wandelt.
Versuch:Vollstandig inelastischer Stoß auf der Luft-kissenbahn (v2a = 0)Die beiden Gleiter der Massenm1 = m2 bleibenbeim Stoß aneinander kleben. Die Geschwindigkeitder Gleiter nach dem Stoß ist gerade die halbe Ge-schwindigkeit von Gleiterm1 vor dem Stoß. Ener-giebilanz: Q = 1
2Ea
kin.
Beispiel: Strahlantrieb – Bewegung eines Systems mitveranderlicher Masse
Versuch: Bei Antrieb einer Spielzeugrakete mit reinerPressluft ist die Rakete langsamer als bei Antrieb mitLuft und Wasser.Begrundung: Zu Beginn in etwa gleiche Ausstoßge-schwindigkeit. Aufgrund der großeren Masse des aus-gestoßenen Wassers großerer Impuls des “Treibstof-fes”. Wegen Gesamtimpulserhaltung großerer Impulsder Rakete. Die Rakete wird kontinuierlich durch denRuckstoß der austromenden Treibgase beschleunigt.(Versuch:Raketenauto)
11

2.4 Mechanik starrer Korper
Bei der Betrachtung der Dynamik von Massepunktenoder Korpern unter Vernachlassigung ihrer Ausdeh-nung: Alle Krafte wirken auf ihren Schwerpunkt~Rs
⇒ nur translatorische Bewegungen
Bei starren Korpern, bei denen Form und Ausdehnungunter Einwirkung externer Krafte konstant bleiben:Externe Krafte konnen außerhalb von~Rs angreifen⇒ translatorische und rotatorische Bewegungen
2.4.1 Drehmoment
Ist die Drehachse eines starren Korpers fest gelagert,gibt es keine translatorische Bewegung unter Einwir-kung außerer Krafte.
Es kommt zu einer Drehbewegung, wenn eine angrei-fende außere Kraft~F eine zur Drehebene paralleleKomponente hat und die Richtung von~F nicht durchdie Drehachse~A hindurchgeht:
⇒ Die Kraft ~F hat ein wirksamesDrehmoment ~M
zur Achse ~A.
~M ≡ ~r × ~F Dimension [N m]
M entspricht dem Produkt ausF und r⊥, wobei r⊥der kurzeste Abstand zur der Linie ist, entlang dererdie Kraft wirkt (Hebelarm).
Ohne feste Drehachse: Rotation um den Schwerpunkteines starren Korpers
⇒ Das Drehmoment~M , das durch eine außere Krafterzeugt wird, die im Punkt~r im Schwerpunktsystemeines starren Korpers angreift, ist definiert als:
~M = ~r × ~F ; M = r F sin ϕ = r⊥ F
– Fur ~r, ~F und ~M → (Rechte-Hand-Regel)
– ~M ‖ ~ω
– Der Korper rotiert nicht, wenn im Schwerpunkt~Rs die Summe aller angreifenden Drehmomen-te ~Mi gleich null ist.
In ~Rs gilt:∑
i
~Mi = 0
Beispiel: System von zwei Massepunkten, die durchmasselose Stange starr miteinander verbunden sind.
~M1 + ~M2 = ~r1 × m1 ~g + ~r2 × m2 ~g = 0
⇒ r1 = −r2m2
m1(Hebelgesetz)
Versuch: Ein Besen wird entlang seines Stieles so lan-ge auf dem Finger verschoben, bis er sich nicht mehrdreht (inRs). Zersagen inRs und Wiegen der beidenStucke zeigt: Massen sind nicht gleich.Bei nicht - reibungsfrei rotierenden, starren Korpern,muss die relevante Drehachse nicht durchRs gehen.
Versuch:folgsame Garnrolle
Aufgrund von Reibung ist nicht die Symmetrieachsedie Drehachse, sondern die BeruhrungslinieAm derGarnrolle mit dem Boden.
⇒ Je nach Winkel zwischen gezogenem Faden undBoden rollt sich die Garnrolle bei Zug weiter ab oderfolgt der Zugkraft (Richtung von~M !).
2.4.2 Rotationsenergie und Tragheitsmoment
Ein Drehmoment~M verrichtet bei der Drehung einesKorpers um den Winkelϕ die Arbeit W :
dW = ~F · ~dr = F r⊥ dϕ = M dϕ
⇒ W =
∫
M dϕ = M ϕ
Dabei wird der Korper beschleunigt.
Die kinetische Energie eines um seine Achse rotieren-den Korpers ist die Summe der kinetischen Energienaller einzelnen Teilchenmi des Korpers:
⇒ Ekin,i = 12
mi v2i
Dabei haben alle Teilchenmi die gleiche Winkelge-schwindigkeitω = vi/ri:
12

⇒ Ekin,i = 12mi r
2i ω2
Die Summe uber alle Teilchenmi ergibt die kineti-sche EnergieErot des gesamten rotierenden Korpers:
Erot = 12
∑
i
mi r2i ω2
Dabei berucksichtigt dasTr agheitsmomentΘ Formund Masse des rotierenden Korpers:
Θ =∑
i
mi r2i =
∫
dm r2 Dimension [kg m2]
⇒ Fur die Rotationsenergie eines rotierenden Korpers:
Erot = 12Θ ω2
Beispiel 1: Tragheitsmoment von drei Massepunkten,die starr durch masselose Stangen verbunden sind:
Θ = m1 r21 + m2 r2
2 + m3 r23
Beispiel 2: Tragheitsmoment von Voll- und Hohlwal-ze (Versuch):Zwei Walzen mit identischen Abmessungen und Mas-sen rollen eine schiefe Ebene hinunter. In einer Walze(Aluminium) ist die Masse im außeren Rand konzen-triert, in der anderen (Kunststoff) homogen verteilt.Beobachtung: Die Walze aus Kunststoff rollt die schie-fe Ebene schneller hinunter.
Energieerhaltung:Epot = Ekin(translatorisch)+Erot
TragheitsmomentΘz eines Zylinders mit homogenerMasseverteilung:
Θz =
∫
Zyl
r2dm = ρ
∫
VZ
r2dV
KreisflacheAK :
AK =
R∫
0
2π∫
0
r dϑ dr = R2 π
ZylindervolumenVZ :
VZ = AK
l∫
0
dz = l R2 π
In Zylinderkoordinaten:
dV = d3r = r dr dϑ dz
⇒ Θz = ρ
R∫
0
r2 r dr
2π∫
0
dϑ
l∫
0
dz
= ρR4
42π l =
mg
R2 π l
R4
2π l
=mg
2R2
Fur das Tragheitsmoment eines Hohlzylinders mit Ra-diusR, in dem seine Massemg in einer dunnen Wandkonzentriert ist:
Θhz = mg R2
⇒ Bei gleicher Masse und Radius hat ein Hohlzylin-der ein großeres Tragheitsmoment als ein Zylinder.Mit mg g h = 1
2mg v2
s + 12Θ ω2 und vs = ω R gilt:
Fur den Vollzylinder:
ω =
√
4
3
g h
R2
Fur den Hohlzylinder:
ω =
√
g h
R2
⇒ Vollzylinder rollt schneller die schiefe Ebene hin-unter als der Hohlzylinder.
Bei Rotation eines Korpers der Massemg um eine be-liebige feste Achse gilt derSteiner’sche Satz:
ΘA = ΘS + mg d2
Das TragheitsmomentΘA bei Rotation um eine be-liebige AchseA ist die Summe des Tragheitsmomen-tes Θs der Rotation um die zuA parallele AchseAs durch den SchwerpunktRs des Korpers und desTragheitsmomentesmg d2 fur Rotation umA.
2.4.3 Drehimpuls
Analog zur Definition des Drehmoments~M = ~r ×~F wird der Drehimpuls~L eines Massepunktes, dersich an einem Ort~r bezuglich des Ursprungs mit derGeschwindigkeit~v bewegt, definiert als:
~L ≡ ~r × ~p = m~r × ~v Dimension [J s]
Auch fur den Drehimpuls gilt ein Erhaltungsatz:
Ohne Einwirkung eines außeren Drehmoments bleibtder Drehimpuls nach Betrag und Richtung konstant:
13
d~L
dt= ~M = ~r × ~Fext = 0
wenn ~Fext = 0 oder ~Fext ⊥ ~v
Versuch:Experimente mit dem Drehstuhl
1) Person mit 3 kg Hanteln in den Handen rotiert lang-sam mit ausgestreckten Armen. Legt sie die Hantelnan den Korper an, erhoht sich die Winkelgeschwin-digkeit ωD des Drehstuhls.2) Drehstuhl rotiert nicht. Anstelle der Hanteln haltdie Person eine Fahrradfelge in den Handen. Drehender Fahrradfelge mit~ωF ||~ωD fuhrt zu Rotation desDrehstuhls.
2.4.4 Rotationsbewegung
Fur das Rollen eines starren Korpers mit kreisformi-gem Querschnitt (ohne Rutschen) gilt:Jeder Punkt des Korpers rotiert im Schwerpunktsys-tem um~Rs mit gleicher Winkelgeschwindigkeitω.
⇒ vs = R ω (Rollbebedingung)Beispiel 1)Rollbewegung eines Zylinders der Massemg auf einer schiefen Ebene:
Die Gewichtskraft~FG erzeugt, bezogen auf den Auf-lagepunktA (momentane Drehachse), das Drehmo-ment:
MA = R FAB = R mg g sinϕ
mit M = L und L = Θ ω
⇒ Winkelbeschleunigungω =MA
ΘA
TragheitsmomentΘA = Θs +mg R2 und vs = R ω:
as = R ω = RMA
ΘA= g sin ϕ
mg R2
12
mg R2 + mg R2
= 23g sin ϕ
Ohne Reibung rutscht der Korper die schiefe Ebenehinunter (as = g sin ϕ ):D.h. um das Drehmoment fur die Rollbewegung her-zustellen, muss an der Rotationsachse in~Rs eine An-triebskraft angreifen, die entgegengesetzt dem Roll-widerstand ist.
⇒ Fur das DrehmomentMA = R FAB = µRo FN
mit RollreibungskoeffizientµRo (Dimension [m])
⇒ Rollwiderstand:FRo = MA/R = FAB
Rollreibung entsteht durch elastische Verformung derBahn und des rollenden Korpers am AuflagepunktA.(In der Regel keine rein elastischen Prozesse→ Ener-giedissipation). D.h. im Gegensatz zu Haft- und Glei-treibung keine Verringerung der Rollreibung durch Schmier-mittel.
Vergleich: Wagen und Schlitten mit gleicher Masse:
Wagen erfordert Kraft:FWa = M/R = µRo FG/R
Schlitten:FSchl = µG FG
FWa
FSchl=
µRo
µG R
Typische Zahlenwerte:µRo = 0.001 m, µG = 0.3
R=0.5 m ⇒ FWa/FSchl = 1/150
⇒ Wagen mit großen Radern
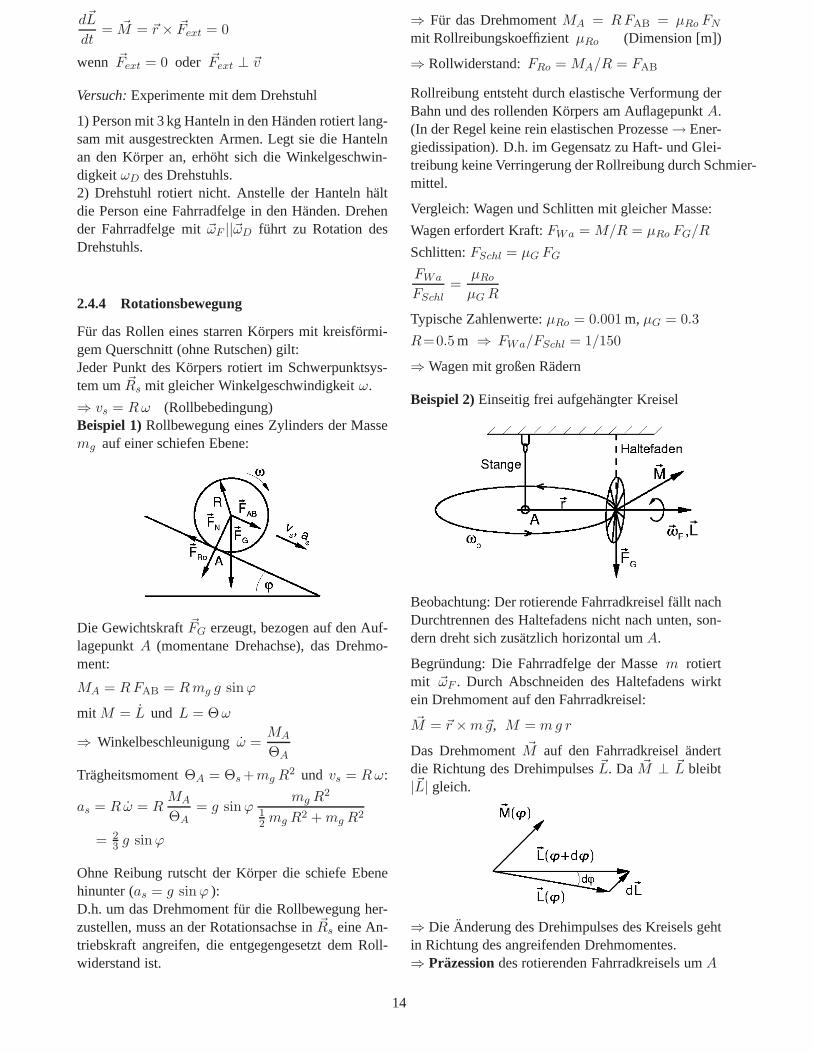
Beispiel 2)Einseitig frei aufgehangter Kreisel
Beobachtung: Der rotierende Fahrradkreisel fallt nachDurchtrennen des Haltefadens nicht nach unten, son-dern dreht sich zusatzlich horizontal umA.
Begrundung: Die Fahrradfelge der Massem rotiertmit ~ωF . Durch Abschneiden des Haltefadens wirktein Drehmoment auf den Fahrradkreisel:
~M = ~r × m~g, M = m g r
Das Drehmoment~M auf den Fahrradkreisel andertdie Richtung des Drehimpulses~L. Da ~M ⊥ ~L bleibt|~L| gleich.
⇒ Die Anderung des Drehimpulses des Kreisels gehtin Richtung des angreifenden Drehmomentes.⇒ Prazessiondes rotierenden Fahrradkreisels umA
14
2.5 Mechanik deformierbarer Korper
2.5.1 Spannung und Dehnung
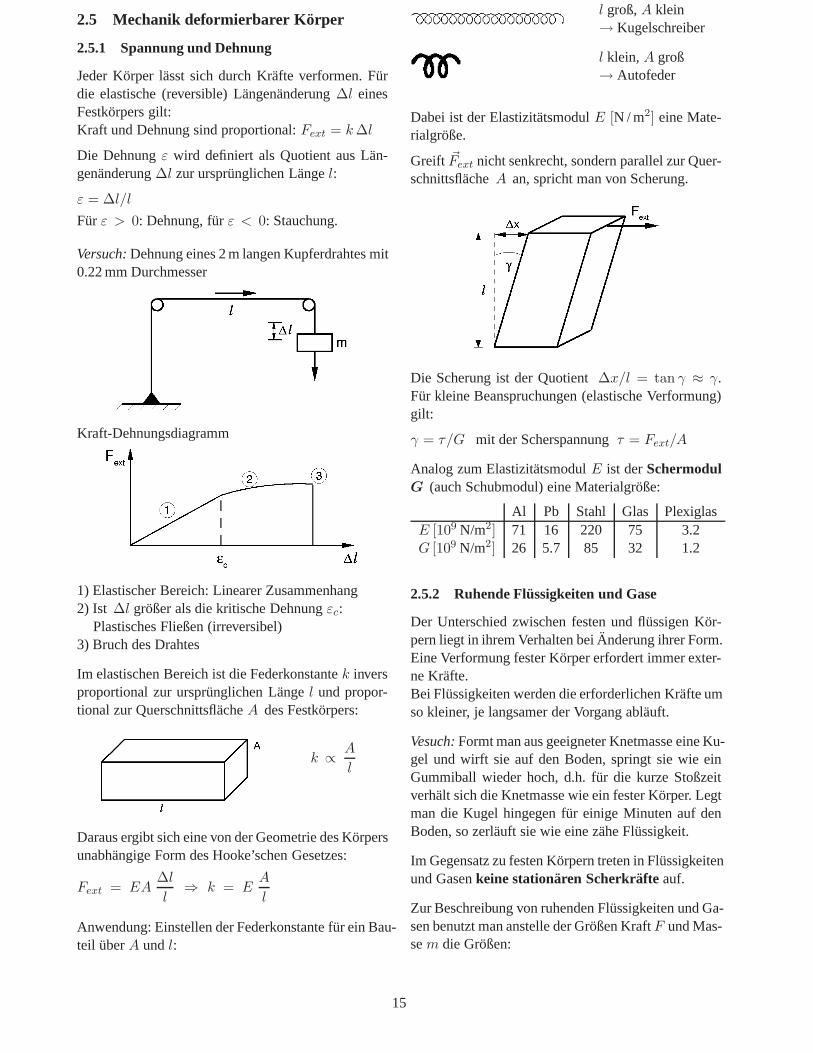
Jeder Korper lasst sich durch Krafte verformen. Furdie elastische (reversible) Langenanderung∆l einesFestkorpers gilt:Kraft und Dehnung sind proportional:Fext = k ∆l
Die Dehnungε wird definiert als Quotient aus Lan-genanderung∆l zur ursprunglichen Langel:
ε = ∆l/l
Furε > 0: Dehnung, furε < 0: Stauchung.
Versuch:Dehnung eines 2 m langen Kupferdrahtes mit0.22 mm Durchmesser
Kraft-Dehnungsdiagramm
1) Elastischer Bereich: Linearer Zusammenhang2) Ist ∆l großer als die kritische Dehnungεc:
Plastisches Fließen (irreversibel)3) Bruch des Drahtes
Im elastischen Bereich ist die Federkonstantek inversproportional zur ursprunglichen Langel und propor-tional zur QuerschnittsflacheA des Festkorpers:
k ∝ A
l
Daraus ergibt sich eine von der Geometrie des Korpersunabhangige Form des Hooke’schen Gesetzes:
Fext = EA∆l
l⇒ k = E
A
l
Anwendung: Einstellen der Federkonstante fur ein Bau-teil uberA und l:
l groß,A klein→ Kugelschreiber
l klein, A groß→ Autofeder
Dabei ist der ElastizitatsmodulE [N / m2] eine Mate-rialgroße.
Greift ~Fext nicht senkrecht, sondern parallel zur Quer-schnittsflacheA an, spricht man von Scherung.
Die Scherung ist der Quotient∆x/l = tan γ ≈ γ.Fur kleine Beanspruchungen (elastische Verformung)gilt:
γ = τ/G mit der Scherspannungτ = Fext/A
Analog zum ElastizitatsmodulE ist derSchermodulG (auch Schubmodul) eine Materialgroße:
Al Pb Stahl Glas PlexiglasE [109 N/m2] 71 16 220 75 3.2G [109 N/m2] 26 5.7 85 32 1.2
2.5.2 Ruhende Flussigkeiten und Gase
Der Unterschied zwischen festen und flussigen Kor-pern liegt in ihrem Verhalten beiAnderung ihrer Form.Eine Verformung fester Korper erfordert immer exter-ne Krafte.Bei Flussigkeiten werden die erforderlichen Krafte umso kleiner, je langsamer der Vorgang ablauft.
Vesuch:Formt man aus geeigneter Knetmasse eine Ku-gel und wirft sie auf den Boden, springt sie wie einGummiball wieder hoch, d.h. fur die kurze Stoßzeitverhalt sich die Knetmasse wie ein fester Korper. Legtman die Kugel hingegen fur einige Minuten auf denBoden, so zerlauft sie wie eine zahe Flussigkeit.
Im Gegensatz zu festen Korpern treten in Flussigkeitenund Gasenkeine stationaren Scherkrafte auf.
Zur Beschreibung von ruhenden Flussigkeiten und Ga-sen benutzt man anstelle der Großen KraftF und Mas-sem die Großen:
15

Druck P =F
ADimension
[
Nm2
≡ Pa
]
(Pascal)
und Dichteρ(~r ) =dm(~r )
dV
(Teilchensysteme aus∼ 1023 Teilchen).
Im Gegensatz zu Festkorpern und Flussigkeiten neh-men Gase wegen ihrer geringen Dichte fast jedes ver-fugbare VolumenV ein.
Zahlenwerte:ρ (Luft) ≈ 1.3 kg/m3, ρ (Wasser) ≈1003 kg/m3, ρ (Platin) ≈ 21400 kg/m3
a) Gase
Fur nicht-stromende, ideale Gase gilt das Gesetz vonBoyle und Marriotte:
P V = konst.
⇒ V =konst.
P⇒ dV
dP= −konst.
P 2= −V
P
D.h. Gase sind kompressibel. Erhohung des Drucksfuhrt zu Verringerung des Volumens (dV/dP < 0).
Die Kompressibilit at κ ist ein Maß dafur, wie starksich das Volumen eines Korpers bei Druckanderungverandert:
κ = − 1
V
dV
dP
Der Kehrwert vonκ ist derKompressionsmodulK:
K ≡ 1
κ= −V
dP
dVDimension
[
Nm2
= Pa
]
Wie Elastizitatsmodul ist der Kompressionsmodul ei-ne Materialgroße.
Zahlenwerte:K(Aluminium) = 73 GPa,K(Plexiglas)= 3.6 GPa,K(H2O)≈ 2 GPa,K(Luft) ≈ 10-100 KPa
Fur Gase gilt mitdV
dP= −V
P
κ =1
P⇒ K = P
Mit P V = konst. undm = ρV ⇒ ρ ∝ P
Anwendungsbeispiel: Abhangigkeit des Luftdruckesvon der Hohe in der Erdatmosphare
⇒ Barometrische Hohenformel:
P (z) = P0 exp
[
−gρ0
P0z
]
Mit ρ0 = 1.3 kg/m2 undP0 = 1.013 · 105 Pa halbiertsich der Luftdruck etwa alle 5 km Hohe.
b) Flussigkeiten – Hydrostatik
Aufgrund der verschwindend kleinen Kompressibilitatist fur Flussigkeiten die Annahme vonκ ' 0 eine gu-te Naherung (κh2o = 0.5 · 10−10 Pa−1).
D.h. fur die Druckverteilung in einer Flussigkeitssaule:
dm = ρAdzdPs = ρ g dzκ = 0 ⇒ ρ = konst.
⇒ Fur den hydrostatischen DruckPs in Tiefe z:
Ps(z) =F (z)
A=
m(z) g
A=
ρAz g
A= ρ z g
- Lineare Zunahme des Druckes mit der Tiefe
- Der hydrostatische Druck in einer Flussigkeithangt nur von der Hohe der Flussigkeitssauleab.
Z.B. ρh2o ' 1 g/cm3: Der Druck nimmt um105 Pa(= 1 bar) etwa alle 10 m Tiefe zu.
Folgen der Druckverteilung in einer Flussigkeit:
1) Hydrostatisches Paradoxon:
Versuch:Der Bodendruck in einem Gefaß ist abhangigvon der Fullhohe, nicht von der Fullmenge.
Da in Flussigkeiten keine stationaren Scherkrafte auf-treten, sind die Krafte auf die Wande immer senkrechtzur Wand. Druckunterschiede am Boden der einzel-nen Gefaßteile werden durch ihre Verbindung ausge-glichen:⇒ gleiche Fullhohe in den unterschiedlichenGefaßteilen.
16
2) Pascal’sches Prinzip:
Wird auf eine Fussigkeit in einem Gefaß ein externerDruck ausgeubt, so verteilt sich der Druck gleichma-ßig auf jedes Volumenelement der Flussigkeit und aufdie Wand des Gefaßes.
Versuch:Allseitigkeit des Druckes
Ein glaserner Rundkolben mit offenen Glasrohren ander Seite wird mit violetter Kaliumpermanganatlosunggefullt und in ein Wasserbecken getaucht.Beim Druck auf den Kolben entstromt aus allen Roh-ren gleichermaßen die farbige Losung.
Anwendung: Hydraulische Presse
Senken des Flussigkeitsspiegels im dunnen Rohr umHoheh1 fuhrt zum Anstieg des Flussigkeitsspiegelsim dicken Rohr umh2, wobei gilt (κ = 0):V = h1 A1 = h2 A2 = konst.
Druckt man mit KraftF1 aufA1 und bewegt den Kol-ben dabei umh1 leistet man die ArbeitW1 = h1F1,die im dicken Rohr alsW2 = h2 F2 wieder frei wird.
Mit W1 = W2 ⇒ F2 =h1
h2
F1 =A2
A1
F1
(vgl. Hebelgesetz)⇒ Durch großen Flachenunterschied Transformationvon kleinen in große Krafte.
Versuch:Sprengen eines Eisenbolzens mit einer hy-draulischen Presse
3) Auftrieb
Ein starrer Korper mit Dichteρk und VolumenVk er-fahrt in einer Flussigkeit der Dichteρfl die Auftriebs-kraft FA.
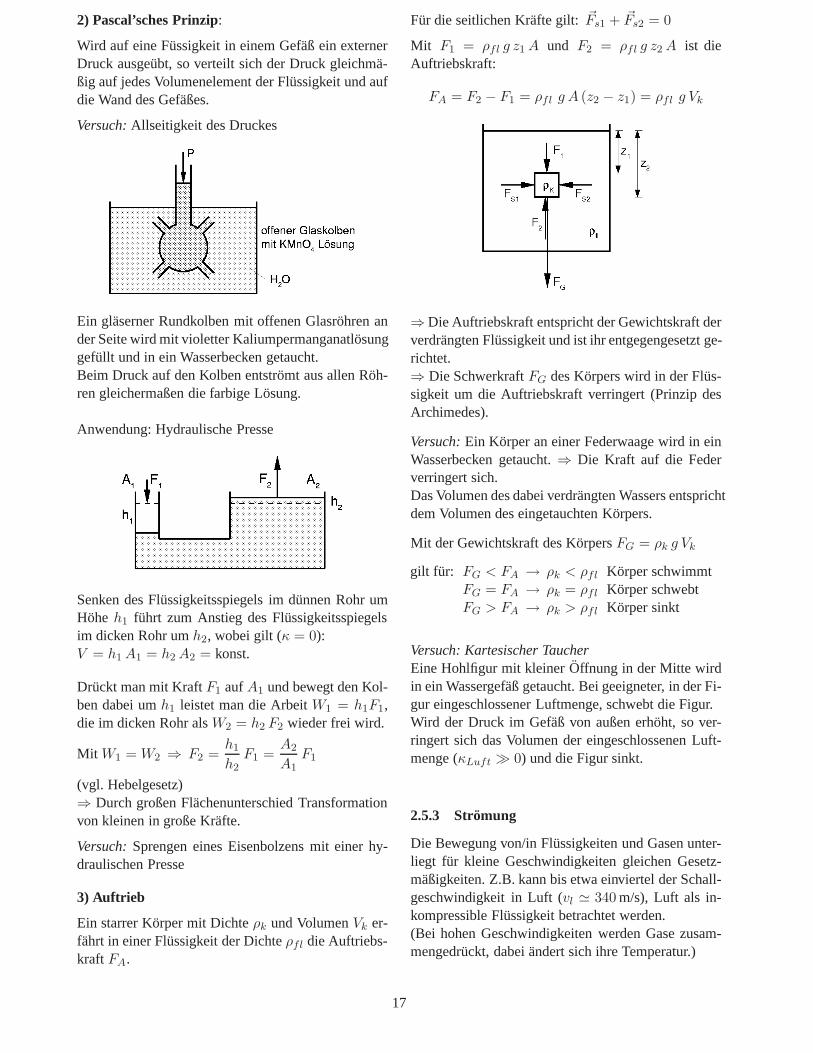
Fur die seitlichen Krafte gilt:~Fs1 + ~Fs2 = 0
Mit F1 = ρfl g z1 A und F2 = ρfl g z2 A ist dieAuftriebskraft:
FA = F2 − F1 = ρfl g A (z2 − z1) = ρfl g Vk
⇒ Die Auftriebskraft entspricht der Gewichtskraft derverdrangten Flussigkeit und ist ihr entgegengesetzt ge-richtet.⇒ Die SchwerkraftFG des Korpers wird in der Flus-sigkeit um die Auftriebskraft verringert (Prinzip desArchimedes).
Versuch:Ein Korper an einer Federwaage wird in einWasserbecken getaucht.⇒ Die Kraft auf die Federverringert sich.Das Volumen des dabei verdrangten Wassers entsprichtdem Volumen des eingetauchten Korpers.
Mit der Gewichtskraft des KorpersFG = ρk g Vk
gilt fur: FG < FA → ρk < ρfl Korper schwimmtFG = FA → ρk = ρfl Korper schwebtFG > FA → ρk > ρfl Korper sinkt
Versuch: Kartesischer TaucherEine Hohlfigur mit kleinerOffnung in der Mitte wirdin ein Wassergefaß getaucht. Bei geeigneter, in der Fi-gur eingeschlossener Luftmenge, schwebt die Figur.Wird der Druck im Gefaß von außen erhoht, so ver-ringert sich das Volumen der eingeschlossenen Luft-menge (κLuft � 0) und die Figur sinkt.
2.5.3 Stromung
Die Bewegung von/in Flussigkeiten und Gasen unter-liegt fur kleine Geschwindigkeiten gleichen Gesetz-maßigkeiten. Z.B. kann bis etwa einviertel der Schall-geschwindigkeit in Luft (vl ' 340 m/s), Luft als in-kompressible Flussigkeit betrachtet werden.(Bei hohen Geschwindigkeiten werden Gase zusam-mengedruckt, dabei andert sich ihre Temperatur.)
17
Versuch:Ein Ball kann in einem Luftstrom aus einerDuse gehalten werden. Dabei wird die Gewichtskraftdes Balles durch den kontinuierlichen Impulsubertragder stromenden Teilchen auf den Ball aufgebracht. Po-sitioniert bleibt der Ball durch den Unterdruck im Luft-strom.
Bei einem leichten Tischtennisball kann der Luftstromsogar um etwa30◦ geneigt werden, ohne dass der Ballaus dem Luftstrom fallt.
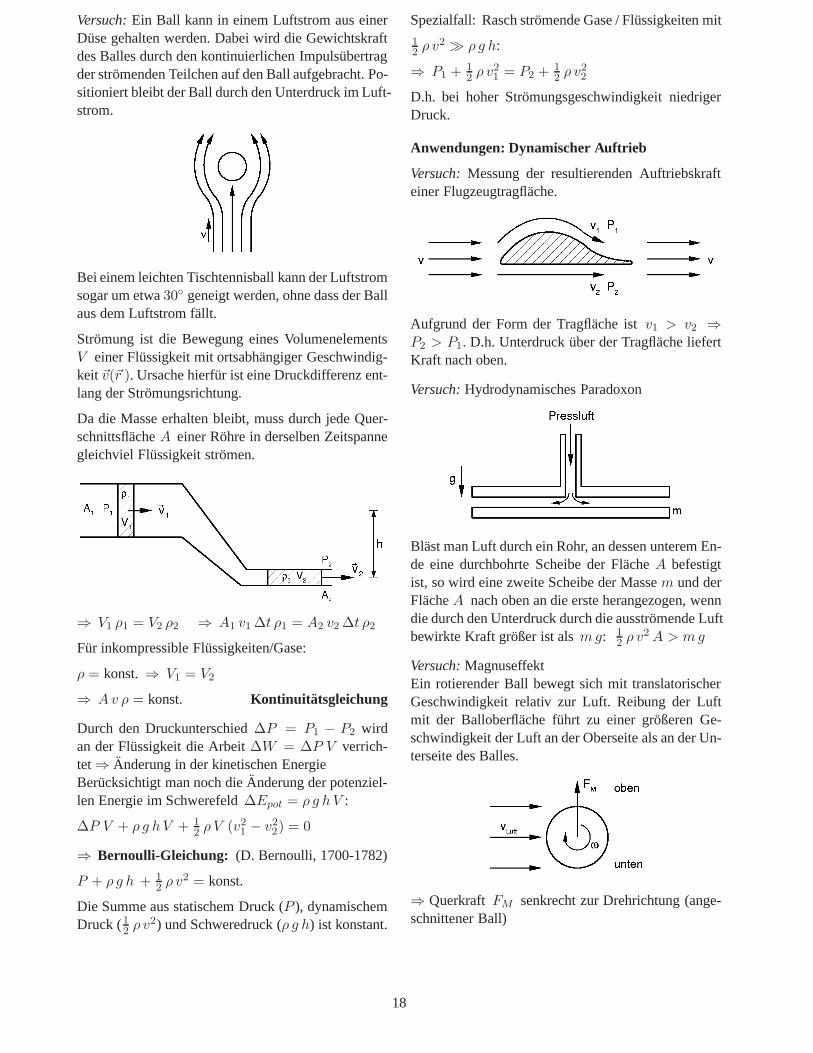
Stromung ist die Bewegung eines VolumenelementsV einer Flussigkeit mit ortsabhangiger Geschwindig-keit~v(~r ). Ursache hierfur ist eine Druckdifferenz ent-lang der Stromungsrichtung.
Da die Masse erhalten bleibt, muss durch jede Quer-schnittsflacheA einer Rohre in derselben Zeitspannegleichviel Flussigkeit stromen.
⇒ V1 ρ1 = V2 ρ2 ⇒ A1 v1 ∆t ρ1 = A2 v2 ∆t ρ2
Fur inkompressible Flussigkeiten/Gase:
ρ = konst. ⇒ V1 = V2
⇒ Av ρ = konst. Kontinuit atsgleichung
Durch den Druckunterschied∆P = P1 − P2 wirdan der Flussigkeit die Arbeit∆W = ∆P V verrich-tet⇒ Anderung in der kinetischen EnergieBerucksichtigt man noch dieAnderung der potenziel-len Energie im Schwerefeld∆Epot = ρ g hV :
∆P V + ρ g hV + 12ρV (v2
1 − v22) = 0
⇒ Bernoulli-Gleichung: (D. Bernoulli, 1700-1782)
P + ρ g h + 12ρ v2 = konst.
Die Summe aus statischem Druck (P ), dynamischemDruck (1
2ρ v2) und Schweredruck (ρ g h) ist konstant.
Spezialfall: Rasch stromende Gase / Flussigkeiten mit12
ρ v2 � ρ g h:
⇒ P1 + 12ρ v2
1 = P2 + 12ρ v2
2
D.h. bei hoher Stromungsgeschwindigkeit niedrigerDruck.
Anwendungen: Dynamischer Auftrieb
Versuch:Messung der resultierenden Auftriebskrafteiner Flugzeugtragflache.
Aufgrund der Form der Tragflache istv1 > v2 ⇒P2 > P1. D.h. Unterdruck uber der Tragflache liefertKraft nach oben.
Versuch:Hydrodynamisches Paradoxon
Blast man Luft durch ein Rohr, an dessen unterem En-de eine durchbohrte Scheibe der FlacheA befestigtist, so wird eine zweite Scheibe der Massem und derFlacheA nach oben an die erste herangezogen, wenndie durch den Unterdruck durch die ausstromende Luftbewirkte Kraft großer ist alsm g: 1
2ρ v2 A > m g
Versuch:MagnuseffektEin rotierender Ball bewegt sich mit translatorischerGeschwindigkeit relativ zur Luft. Reibung der Luftmit der Balloberflache fuhrt zu einer großeren Ge-schwindigkeit der Luft an der Oberseite als an der Un-terseite des Balles.
⇒ Querkraft FM senkrecht zur Drehrichtung (ange-schnittener Ball)
18

2.5.4 Viskositat und Reibung
Bei der Stromung von Flussigkeiten unterscheidet manzwischen laminarer und turbulenter Stromung.
Ein Rohr wird von Wasser durchstromt. Bringt mankontinuierlich uber Dusen Tinte auf der einstromen-den Seite ein, so zeigt sich bei geringen Stromungsge-schwindigkeiten der Tintenfaden als Stromlinie, wah-rend fur hohe Geschwindigkeiten Wirbel (Turbulen-zen) auftreten (Versuch).
Laminare Str omung:Einzelne Flussigkeitsschichten(Laminate) gleiten gegeneinander ohne sich zu ver-mischen. Dabei reiben aufgrund der Wechselwirkungzwischen den Flussigkeitsmolekulen die einzelnen La-minate aneinander.
Bewegt man bei einem System aus einer Flussigkeits-schicht zwischen zwei Platten der OberflachenA dieeine Platte relativ zur anderen mit der Geschwindig-keit v, so muss man die ReibungskraftFR aufbringen:
FR = η Adv
dx
FR ist dabei direkt proportional zum Geschwindig-keitsgefalledv/dx und zur Oberflache der einzelnenLaminate.
Bei festen Korpern wachst die Scherspannungτ =F/A mit zunehmender Verformung. Dieinnere Rei-bung in Flussigkeiten ist dagegen proportional zur Ver-formungsgeschwindigkeit:
⇒ τ = ηdv
dx
Der Proportionalitatsfaktorη ist die Zahigkeitskons-tante oder die Viskositat.
Dimension
[
N sm2
= Pa s
]
(Pascalsekunden)
Die Viskositat sinkt exponentiell mit der Temperatur:Z.B. Glyzerin: 273 K: 10 Pa s; 333 K: 0.08 Pa sNatriumsilikat: 1000 K:1010 Pa s; 1600 K: 10 Pa s
Zahlenwerte in Pa s bei20◦C:
Luft 1.7 · 10−5 Glyzerin 1.5Wasser 1.0 · 10−3 Honig 3 − 8Olivenol 8.1 · 10−2 Pech 107
Anwendung: Laminare Stromungen durch Rohre
Versuch: Der Volumenstrom durch ein Rohr hangt vonder 4. Potenz des Radius des Rohres ab.Durch eine Druckdifferenz wird in einem Rohr mitRadiusR und Langel eine stationare Stromung auf-recht erhalten. Aus Symmetriegrunden kann die Stro-mungsgeschwindigkeitv nur von der Entfernungrvon der Rohrmitte abhangen.
S ist die Mantelflache eines Kreiszylinders im Ab-standr, A seine Stirnflache.
Treibende DruckkraftFp = (P1 − P2)A = π r2 ∆P
Reibungskraft:FR(r) = −ηSdv(r)
dr= −η2πrl
dv(r)
dr
Im stationaren Fall:dv
dl= 0
⇒ Fp = FR ⇒ r ∆P = −2 η ldv(r)
dr
⇒ v(r) = −∆P
4 η lr2 + c
Randbedingung:v(R) = 0 ⇒ c =∆P
4 η lR2
⇒ v(r) =∆P
4 η l(R2 − r2)
Parabolisches Geschwindigkeitsprofil mit:
vmax = v(0) =∆P R2
4 η l
Fur den Volumenstrom durch das Rohr〈Av〉R folgtdurch Integration:
〈Av〉R =
R∫
0
v(r) 2π r dr =∆P π
2 η l
R∫
0
(R2−r2) r dr
und damit dasHagen-Poiseuille’sche Gesetz:
⇒ 〈Av〉R =π
8
∆P
η lR4
Beispiel Blutgefaße:Fuhren Kalkablagerungen zu einer 20 %tigen Verrin-gerung des Arteriendurchmessers, verringert sich derBlutdurchfluss um den Faktor 2.5 (1/0.84).
19
2.6 Schwingungen und Wellen
Schwingungen und die damit eng verwandten Wel-lenphanomene gehoren zu den am weitesten verbrei-teten Phanomenen der Physik.
Beispiele:– Elektromagnetische Wellen (schwingende elek-
trische und magnetische Felder): Rundfunk,Mikrowelle, Infrarot, Licht, UV, Rontgen- undγ -Strahlung
– Schwingungen von Atomen in Festkorpern:Warme, Gitterschwingungen (Phononen)
– Schwingungen in Atomkernen: Kernspaltung
– Materiewelle (Welle-Teilchen-Dualismus)
– Mechanische Schwingungen und Wellen:z.B. Pendel, Wasserwellen, Schallwellen
Kennzeichen aller Schwingungen ist eine Gleichge-wichtslage und eine rucktreibende Kraft in Richtungdieser Gleichgewichtslage.
2.6.1 Erzwungene Schwingung und Resonanz
Wird die Schwingung eines Korpers durch eine peri-odisch wirkende KraftFext(t) angeregt, kann dies zuResonanzerscheinungen fuhren.
Fur die Bewegungsgleichung eines solchen Systemsergibt sich:
x + γ x + ω20 x = Fext/m
Dabei istω20 die Eigenfrequenz der Schwingung und
γ x ein Term, der die Dampfung der Schwingung durchReibung berucksichtigt.
Versuch:Pohl’scher Resonanzapparat
Der Versuch zeigt Amplitude und Phase einer erzwun-genen Schwingung in Abhangigkeit von der Kreisfre-quenzωext der AnregungFext(t) und der Dampfungγ der Schwingung.
Beobachtung: Furγ gegen Null undωext≈ω0 kommtes nach einem Einschwingvorgang zu einer Resonanz.D.h. die Amplitude divergiert furωext = ωres, wenndie Dampfungγ → 0 (Resonanzkatastrophe).
Versuch:Zerstorung eines Glases durch Schall
2.6.2 Gekoppelte Oszillatoren
Ein harmonischer Oszillator hat einen Schwingungs-freiheitsgrad und eine Eigenfrequenzω0 und somit ei-ne Resonanz. Gekoppelte Oszillatoren sind Systememit mehreren Schwingungsfreiheitsgraden.
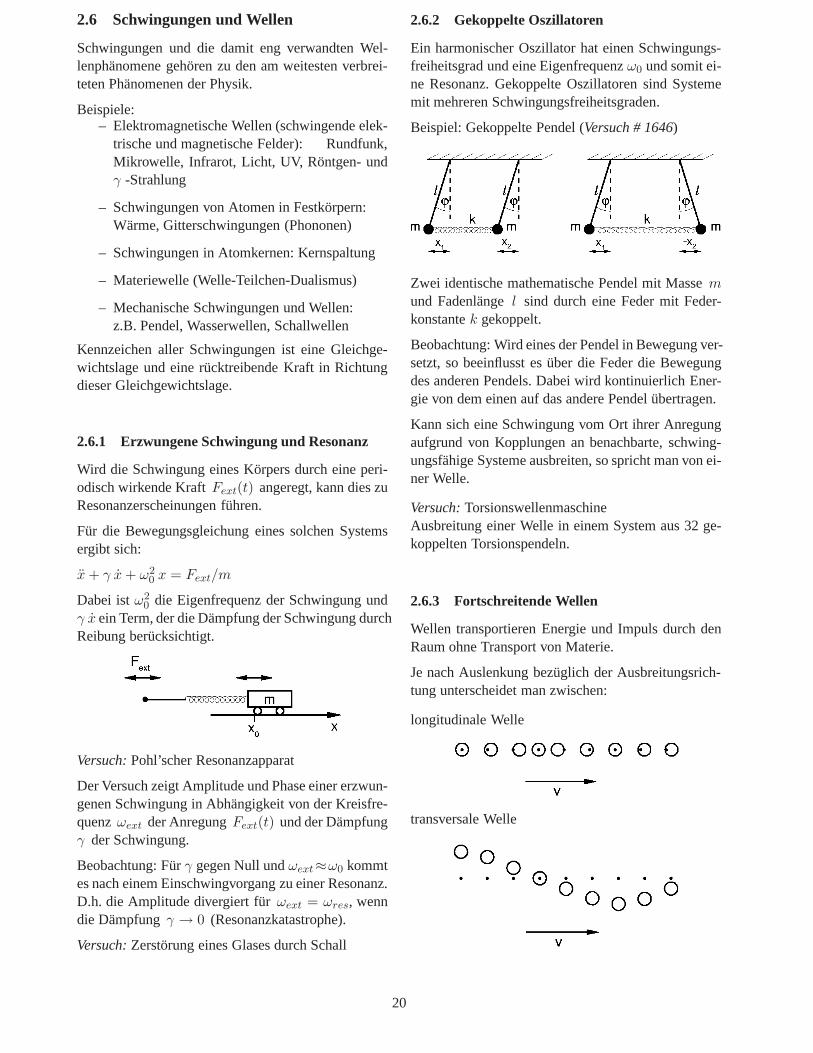
Beispiel: Gekoppelte Pendel (Versuch # 1646)
Zwei identische mathematische Pendel mit Massemund Fadenlangel sind durch eine Feder mit Feder-konstantek gekoppelt.
Beobachtung: Wird eines der Pendel in Bewegung ver-setzt, so beeinflusst es uber die Feder die Bewegungdes anderen Pendels. Dabei wird kontinuierlich Ener-gie von dem einen auf das andere Pendel ubertragen.
Kann sich eine Schwingung vom Ort ihrer Anregungaufgrund von Kopplungen an benachbarte, schwing-ungsfahige Systeme ausbreiten, so spricht man von ei-ner Welle.
Versuch:TorsionswellenmaschineAusbreitung einer Welle in einem System aus 32 ge-koppelten Torsionspendeln.
2.6.3 Fortschreitende Wellen
Wellen transportieren Energie und Impuls durch denRaum ohne Transport von Materie.
Je nach Auslenkung bezuglich der Ausbreitungsrich-tung unterscheidet man zwischen:
longitudinale Welle
transversale Welle
20

Versuch:Ausbreitung eines Wellenberges auf einemSeil (Seilwelle)
Beobachtung: Nach einer raschen horizontalen Aus-lenkung an einem Seilende breitet sich ein Wellenbergmit Ausbreitungsgeschwindigkeitv aus. Bewegt mandas Seil an einem Ende horizontal periodisch hin undher, erhalt man eine periodische Welle, d.h. eine sichausbreitende Schwingung.
Dabei gilt:y(x, t) = f(x− vt), wobeif die Form derWelle berucksichtigt.
Eine transversale Welle, die sich in einem Festkorperausbreitet fuhrt zu Scherung (Scherwelle), die in ei-nem Masseelementdm zu einer rucktreibenden KraftdF = dτ A fuhrt.
Mit der Naherung fur kleine Amplituden ist die
Scherungγ ≈ tan γ =
(
∂y
∂x
)
t
Fur konstante Zeitt ist: dγ =∂2y
∂x2dx
⇒ dτ = Gdγ = G∂2y
∂x2dx mit SchermodulG
Die rucktreibende Kraft beschleunigt dabei das Mas-seelementdm = ρ dV = ρAdx. Mit dF = dτ A
⇒ Bwgl.: AG∂2y
∂x2dx = ρAdx
∂2y
∂t2
Aus der Losung der Bewegungsgleichung folgt mity(x, t) = f(x− vt) fur die eindimensionale Ausbrei-tung einer transversalen Anregung:
⇒ Wellengleichung:∂y2
∂t2= v2 ∂2y
∂x2
mit vt =
√
G
ρ
Ausbreitungsgeschwindigkeitvt einer Scherwelle imFestkorper
Analog zur Scherwelle ergibt sich fur eine longitu-dinale Welle, die sich in einem langen, dunnen Fest-korper ausbreitet (λ > Ausdehnung in Querrichtung,sonst Querkontraktion berucksichtigen):
vl =
√
E
ρmit ElastizitatsmodulE
Longitudinale Wellen breiten sich uber Kompressionund Ausdehnung fort (Dichtewellen).
Da in Flussigkeiten und Gasen keine stationaren Scher-krafte auftreten, konnen sich keine transversalen Wel-len ausbreiten. Fur die Ausbreitungsgeschwindigkeiteiner longitudinalen Welle ergibt sich in Flussigkeiten:
vl =
√
K
ρmit KompressionsmodulK
In Gasen gilt fur hohere Frequenzen (z.B. Schall):An-derung des Druckes fuhrt nebenAnderung der Dichtezu Anderung der Temperatur (→ 4.3.1).
⇒ vl =
√
γ K
ρmit Adiabatenkoeffizientγ
Beispiel Luft: K = P0 = 105 Pa, ρ0 = 1.3 kg m−3,γ = 1.4 ⇒ vl = 340 m/s
Versuch:Messung der Schallgeschwindigkeit in Luftuber Messung der Zeitdifferenz, in der ein kurzes Ge-rausch in zwei Mikrophonen im Abstand von einemMeter aufgenommen wird (∆t ≈ 2.9 ms).
Zahlenwerte furvl in [m/s] bei 20◦C:
Al Pb Stahl Glas Holz Granit5110 1200 5100 5400 3800 4000
Glyzerin Wasser Luft Helium1923 1483 340 971
Dabei ist vt =√
G/E vl ≈ 0.6 vl
Die Materialgroßen ElastizitatsmodulE und Scher-modulG werden so auch durch Messung der Schall-geschwindigkeiten prazise bestimmt.
Alle Wellen der Formy (x, t) = f (x − v t) sind Lo-sungen der Wellengleichung.
Spezialfall: Sinusformige (harmonische) Wellen
Mit Wellenlangeλ, PeriodeT und AmplitudeA:
⇒ y(x, t) = A sin
[
2π
λ(x − v t)
]
21

= A sin
[
2π
λx − 2π v
λt
]
D.h. fur periodische Wellen Periodizitat im Raum:
Fur t = konst. y(x, t0) = y(x + λ, t0)
und Periodizitat in der Zeit:
Furx = konst. y(x0, t) = y(x0, t + T )
Mit Kreisfrequenzω =2π
T= 2π f
und Definition einer Wellenzahlk ≡ 2π
λ
schreibt sichy(x, t) = A sin(k x − ω t)
Eingesetzt in die Wellengleichung:
∂2y
∂t2= −Aω2 sin(k x − ω t) ;
∂2y
∂x2= −Ak2 sin(k x − ω t)
mit∂2y
∂t2= v2 ∂2y
∂x2⇒ v2 =
ω2
k2;
ω
k=
2π f
2π /λ
⇒ v = f λ
D.h. die Ausbreitungsgeschwindigkeit ist gleich Fre-quenz mal Wellenlange.
Beispiel: Elektromagnetische Wellen – schwingende,magnetische und elektrische Felder (transversale, pe-riodische Sinuswellen)Die Ausbreitungsgeschwindigkeit im Vakuum ist dieLichtgeschwindigkeit⇒ c = f λ
2.6.4 Dopplereffekt
C. Doppler formulierte 1842 das Dopplerprinzip umeine Erklarung fur die unterschiedlichen Farben derSterne zu haben (relativist. Dopplereffekt). 1845 ge-lang Buys-Ballot der experimentelle Nachweis des Prin-zips auch beim Schall.
Versuch:Bewegt sich eine Schallquelle relativ zumBeobachter, nimmt der Beobachter eine veranderte Fre-quenz (fb 6= f0) wahr (Schallgeschwindigkeitvl).
Dabei drei Beteiligte: Schallquelle (Pfeife)q - Medi-um (Luft) m - Beobachter (Mikrophon/Ohr)b
Man unterscheidet die Falle:
1) Quelle bewegt sich (vq > 0) im ruhenden Medium(vm = 0) bei ruhendem Beobachter (vb = 0)
Wahrend einer Zeitspanne∆t:- Quelle sendet∆N = f0 ∆t Wellenberge aus- Jeder Wellenberg bewegt sich umvl ∆t weiter
- Quelle bewegt sich umvq ∆t weiter
⇒ Abstand∆x zwischen 1. und∆N . Wellenberg inBewegungsrichtung der Quelle:
∆x = (vl − vq)∆t
⇒ Vor der Quelle ist die Wellenlange:
λv =∆x
∆N=
(vl − vq)∆t
∆N=
vl − vq
f0
= λ0
(
1 − vq
vl
)
mit λ0 =vl
f0
Analog hinter der Quelle:λn = λ0
(
1 +vq
vl
)
Mit f = vl/λ
fv =f0
1 − vq/vl> f0 q nahert sichb
fn =f0
1 + vq/vl< f0 q entfernt sich vonb
Beispiel: Vorbeifahrendes Martinshorn
2) Beobachter bewegt sich mitvb und vq = vm = 0.
Bewegt sich der Beobachter auf die Quelle zu, ist furihn die Geschwindigkeit der Welle:vl + vb
fz =vl + vb
λ0
= f0
(
1 +vb
vl
)
> f0
Entfernt sichb von q ergibt sich demnach:
fω = f0
(
1 − vb
vl
)
< f0
Fur die vonb detektierte Frequenz ergibt sich im all-gemeinen Fall bei Bewegung von Quelle und Beo-bachter aus Zusammenfassung von 1) und 2):
fb = f0(1 ± vb/vl)
(1 ∓ vq/vl)
Dabei oberes Vorzeichen, wennq undb sich annahernund unteres Vorzeichen, wennq undb sich voneinan-der entfernen.
3) Medium bewegt sich mitvm (z.B. Wind)⇒ vl ersetzen durch~vl + ~vm.
4) vq ≥ vl (z.B. Uberschallflugzeug)⇒ keine Wellen vor der Quelle
Wellenberge addieren sich hinter der Quelle auf:⇒ Stoßwelle, die bei Schallwellen alsUberschallknallwahrgenommen wird.
Wird die Geschwindigkeit der Quelle großer als dieAusbreitungsgeschwindigkeit der Wellen bildet sichein Mach’scher Kegel aus (E. Mach 1838-1916).
22
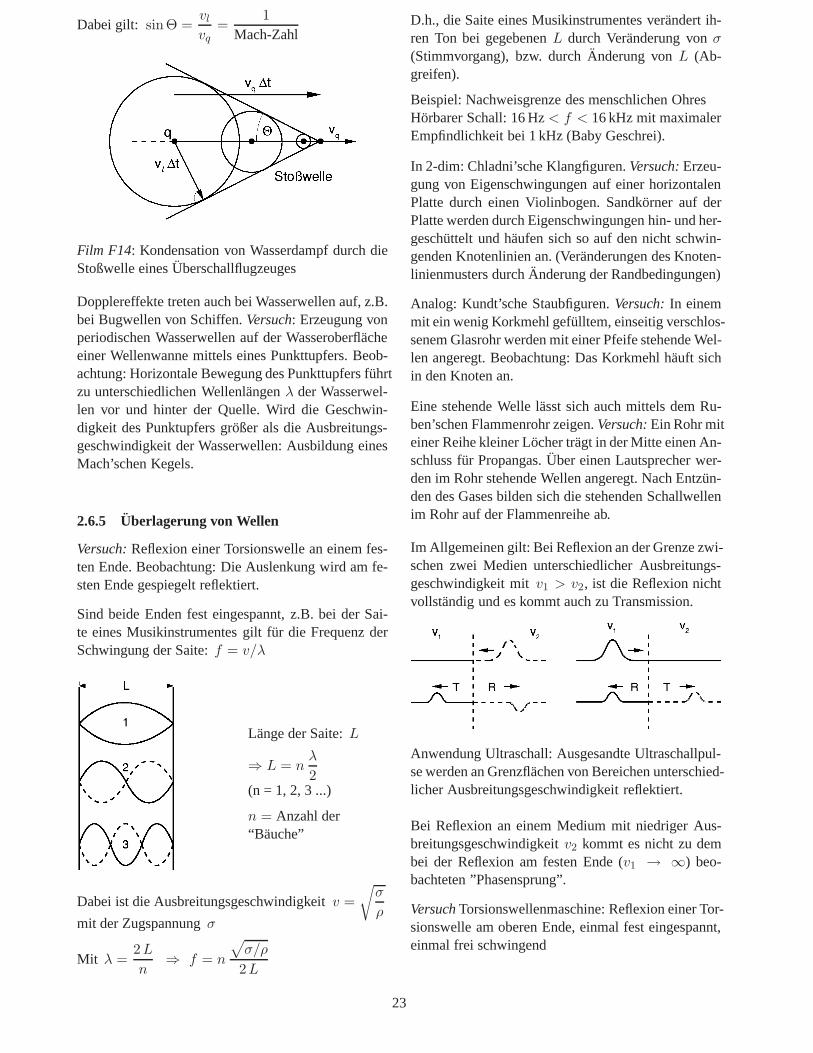
Dabei gilt: sinΘ =vl
vq=
1
Mach-Zahl
Film F14: Kondensation von Wasserdampf durch dieStoßwelle einesUberschallflugzeuges
Dopplereffekte treten auch bei Wasserwellen auf, z.B.bei Bugwellen von Schiffen.Versuch: Erzeugung vonperiodischen Wasserwellen auf der Wasseroberflacheeiner Wellenwanne mittels eines Punkttupfers. Beob-achtung: Horizontale Bewegung des Punkttupfers fuhrtzu unterschiedlichen Wellenlangenλ der Wasserwel-len vor und hinter der Quelle. Wird die Geschwin-digkeit des Punktupfers großer als die Ausbreitungs-geschwindigkeit der Wasserwellen: Ausbildung einesMach’schen Kegels.
2.6.5 Uberlagerung von Wellen
Versuch:Reflexion einer Torsionswelle an einem fes-ten Ende. Beobachtung: Die Auslenkung wird am fe-sten Ende gespiegelt reflektiert.
Sind beide Enden fest eingespannt, z.B. bei der Sai-te eines Musikinstrumentes gilt fur die Frequenz derSchwingung der Saite:f = v/λ
Lange der Saite:L
⇒ L = nλ
2(n = 1, 2, 3 ...)
n = Anzahl der“Bauche”
Dabei ist die Ausbreitungsgeschwindigkeitv =
√
σ
ρmit der Zugspannungσ
Mit λ =2L
n⇒ f = n
√
σ/ρ
2L
D.h., die Saite eines Musikinstrumentes verandert ih-ren Ton bei gegebenenL durch Veranderung vonσ(Stimmvorgang), bzw. durchAnderung vonL (Ab-greifen).
Beispiel: Nachweisgrenze des menschlichen OhresHorbarer Schall: 16 Hz< f < 16 kHz mit maximalerEmpfindlichkeit bei 1 kHz (Baby Geschrei).
In 2-dim: Chladni’sche Klangfiguren.Versuch:Erzeu-gung von Eigenschwingungen auf einer horizontalenPlatte durch einen Violinbogen. Sandkorner auf derPlatte werden durch Eigenschwingungen hin- und her-geschuttelt und haufen sich so auf den nicht schwin-genden Knotenlinien an. (Veranderungen des Knoten-linienmusters durchAnderung der Randbedingungen)
Analog: Kundt’sche Staubfiguren.Versuch:In einemmit ein wenig Korkmehl gefulltem, einseitig verschlos-senem Glasrohr werden mit einer Pfeife stehende Wel-len angeregt. Beobachtung: Das Korkmehl hauft sichin den Knoten an.
Eine stehende Welle lasst sich auch mittels dem Ru-ben’schen Flammenrohr zeigen.Versuch:Ein Rohr miteiner Reihe kleiner Locher tragt in der Mitte einen An-schluss fur Propangas.Uber einen Lautsprecher wer-den im Rohr stehende Wellen angeregt. Nach Entzun-den des Gases bilden sich die stehenden Schallwellenim Rohr auf der Flammenreihe ab.
Im Allgemeinen gilt: Bei Reflexion an der Grenze zwi-schen zwei Medien unterschiedlicher Ausbreitungs-geschwindigkeit mitv1 > v2, ist die Reflexion nichtvollstandig und es kommt auch zu Transmission.
Anwendung Ultraschall: Ausgesandte Ultraschallpul-se werden an Grenzflachen von Bereichen unterschied-licher Ausbreitungsgeschwindigkeit reflektiert.
Bei Reflexion an einem Medium mit niedriger Aus-breitungsgeschwindigkeitv2 kommt es nicht zu dembei der Reflexion am festen Ende (v1 → ∞) beo-bachteten ”Phasensprung”.
VersuchTorsionswellenmaschine: Reflexion einer Tor-sionswelle am oberen Ende, einmal fest eingespannt,einmal frei schwingend
23
2.6.6 Wasserwellen
Wahrend die bisher behandelten Dichte- und Scher-wellen Raumwellen sind, sind Wasserwellen Oberfla-chenwellen.
Fur die Beschreibung ihrer Ausbreitung konnen in gu-ter Naherung vernachlassigt werden:
- Oberflachenspannung furλ > 0.05 m- Reibung- Dichte und kinetische Energie der Luft- Wirbelbildung
⇒ Einzige wirkende Kraft: GewichtskraftFG
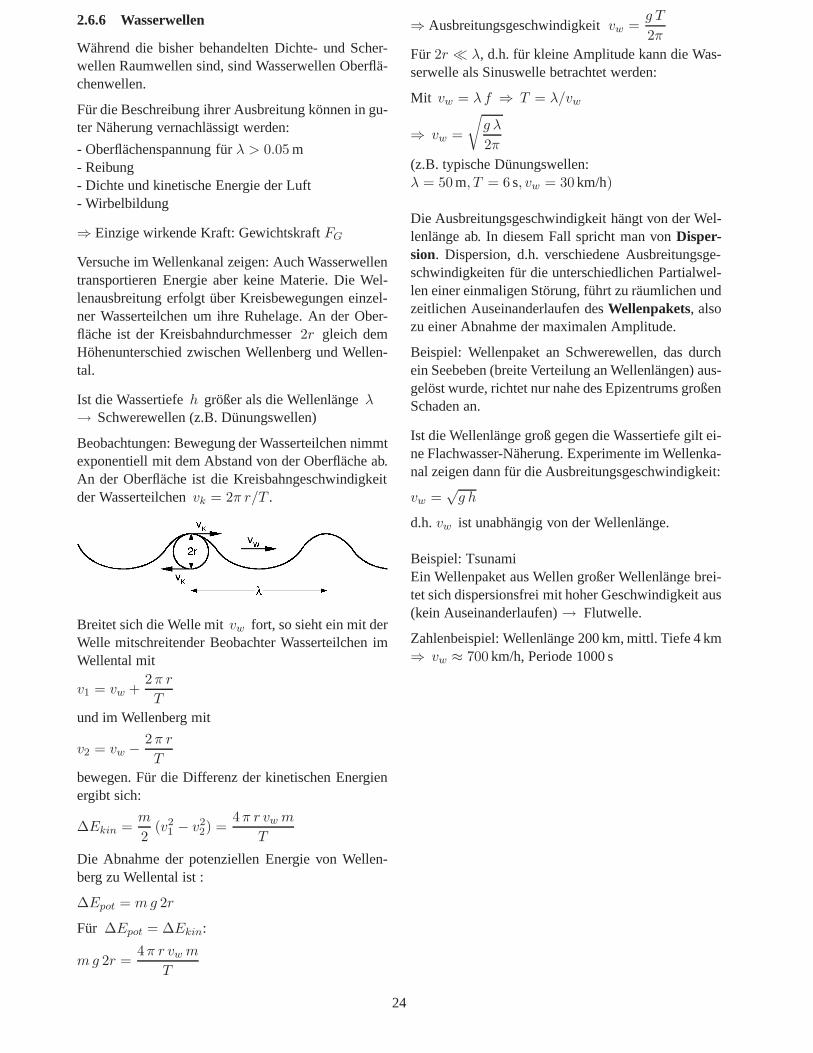
Versuche im Wellenkanal zeigen: Auch Wasserwellentransportieren Energie aber keine Materie. Die Wel-lenausbreitung erfolgt uber Kreisbewegungen einzel-ner Wasserteilchen um ihre Ruhelage. An der Ober-flache ist der Kreisbahndurchmesser2r gleich demHohenunterschied zwischen Wellenberg und Wellen-tal.
Ist die Wassertiefeh großer als die Wellenlangeλ→ Schwerewellen (z.B. Dunungswellen)
Beobachtungen: Bewegung der Wasserteilchen nimmtexponentiell mit dem Abstand von der Oberflache ab.An der Oberflache ist die Kreisbahngeschwindigkeitder Wasserteilchenvk = 2π r/T .
Breitet sich die Welle mitvw fort, so sieht ein mit derWelle mitschreitender Beobachter Wasserteilchen imWellental mit
v1 = vw +2π r
T
und im Wellenberg mit
v2 = vw − 2π r
T
bewegen. Fur die Differenz der kinetischen Energienergibt sich:
∆Ekin =m
2(v2
1 − v22) =
4π r vw m
T
Die Abnahme der potenziellen Energie von Wellen-berg zu Wellental ist :
∆Epot = m g 2r
Fur ∆Epot = ∆Ekin:
m g 2r =4π r vw m
T
⇒ Ausbreitungsgeschwindigkeitvw =g T
2π
Fur2r � λ, d.h. fur kleine Amplitude kann die Was-serwelle als Sinuswelle betrachtet werden:
Mit vw = λ f ⇒ T = λ/vw
⇒ vw =
√
g λ
2π
(z.B. typische Dunungswellen:λ = 50 m, T = 6 s, vw = 30 km/h)
Die Ausbreitungsgeschwindigkeit hangt von der Wel-lenlange ab. In diesem Fall spricht man vonDisper-sion. Dispersion, d.h. verschiedene Ausbreitungsge-schwindigkeiten fur die unterschiedlichen Partialwel-len einer einmaligen Storung, fuhrt zu raumlichen undzeitlichen Auseinanderlaufen desWellenpakets, alsozu einer Abnahme der maximalen Amplitude.
Beispiel: Wellenpaket an Schwerewellen, das durchein Seebeben (breite Verteilung an Wellenlangen) aus-gelost wurde, richtet nur nahe des Epizentrums großenSchaden an.
Ist die Wellenlange groß gegen die Wassertiefe gilt ei-ne Flachwasser-Naherung. Experimente im Wellenka-nal zeigen dann fur die Ausbreitungsgeschwindigkeit:
vw =√
g h
d.h.vw ist unabhangig von der Wellenlange.
Beispiel: TsunamiEin Wellenpaket aus Wellen großer Wellenlange brei-tet sich dispersionsfrei mit hoher Geschwindigkeit aus(kein Auseinanderlaufen)→ Flutwelle.
Zahlenbeispiel: Wellenlange 200 km, mittl. Tiefe 4 km⇒ vw ≈ 700 km/h, Periode 1000 s
24

3 Optik
Optik ist die Lehre von Lichtstrahlen, die wir mit un-seren Augen wahrnehmen konnen.
3.1 Eigenschaften von Lichtstrahlen
Lichtstrahlen bestehen aus elektromagnetischen Wel-len. Ein zeitlich veranderliches Magnetfeld~B ein er-zeugt ein elektrische Feld~E (Induktionsgesetz). Einzeitlich veranderliches~E Feld erzeugt wiederum einmagnetisches Feld~B.
Einfaches Bild: Bewegte Ladungen erzeugen ein zeit-lich variierendes elektrisches Feld, welches wiederumein magnetisches Feld erzeugt.
z
x
λ
e-x
zy
Entlang der Achse der Schwingung der Ladung (z.B.Elektron) entsteht ein elektrisches Feld, das ein ma-gnetisches Feld induziert, welches in einer Ebene senk-recht zu der des elektrischen Feldes schwingt und umeinen Phasenwinkel π
2verschoben ist. Elektroma-
gnetische Welle sind transversale Wellen.
E(z, t) = ~Ex sin (kz − ωt)
B(z, t) = ~By cos (kz − ωt)
Fur periodische Schwingungen ist der Zusammenhangzwischen Wellenlangeλ und Wellenzahlk:k λ = 2π
Zwischen Kreisfrequenzω, Frequenzf , Wellenlangeλ, der EnergieE der Quanten (Photonen) und derLichtgeschwindigkeitc bestehen die Relationen.
c = λ f ω = 2π f E = h f = h ω (h =h
2π)
Mit den Naturkonstanten:Plank’sches Wirkungsquantumh = 4.14 · 10−15 eV sVakuumlichtgeschwindigkeitc = 2, 9979 · 108 m/s
Sichtbares Licht sind elektromagnetische Wellen mitWellenlangen im Bereich von 390 nm bis 790 nm (3.8·1014 Hz bis 7.7 · 1014 Hz). Dies entspricht Energiender Photonen im Bereich von etwa 1.6 eV bis 3.2 eV.
Spektrum elektromagnetischer Wellen (c = f λ):
f [Hz] Bezeichnung Erzeugung
< 106
107
108
109
1010
1011
1012
1013
1014
1015
1016
1017
1018
1019
1020
> 1021
LangwelleMittelwelleTV, UKW
Kurzwelle
Mikrowellen
InfrarotLicht
Ultraviolett
Rontgen-strahlung
Gamma-strahlung
Antenne
Klystron
Gitterschwingungen,Warmestrahlung
Ubergange zwischen Nive-aus von Valenzelektronen
Ubergange zwischen in-neren Schalen der Atome,Bremsstrahlung
Ubergange in Atomkernen
Licht wird in der Regel durch Anregung von Atomenerzeugt: u.a.- Gasentladung (Spektralfarben)- Erhitzung von Materialien (Gluhlampe)- Laser (light amplification by stimulated emission ofradiation)
Fur die Lichtgeschwindigkeit im Vakuum gilt:
c =1√µ0ε0
µ0: magn. Feldkonstante
ε0: Dielektrizitatskonstante
In Materie gilt:
cmat =1√
µrµ0εrε0
εr: relative Dielektrizitatskonst.
µR: relative Permeabilitat
Dabei berucksichtigtεr die Polarisation der Molekuleim elektrischen Feld, was zu einer Abschwachung desFeldes fuhrt (εr > 1). µr berucksichtigt die Ausrich-tung magn. Momente im magn. Feld (atomare magn.Momente). Fur durchsichtige (Absorption klein), dia-und paramagnetische Stoffe istµr ' 1.
⇒ cmat = c/n ' c/√
εr
n bezeichnet man als Brechungsindex. D.h. die Ge-schwindigkeit des Lichts in Materie ist kleiner als dieVakuumlichtgeschwindigkeit.
Versuch: Ein Lichtblitz wird durch einen 2 m langenPlexiglaszylinder und durch Luft geschickt, am obe-ren Ende gespiegelt und unten detektiert. Die Ausbrei-tungsgeschwindigkeit im Plexiglas istcplex ' 0.7c
Versuch: Der Lichtstrahl einer Gluhlampe wird in ei-nem Prisma gebrochen. Beobachtung: Das naturlicheLicht (dito Gluhlampe etc.) besteht aus vielen Wel-
25
lenlangen, die mit Hilfe von Prismen in die verschie-denen Farben zerlegt werden kann.
εr hangt vonλ ab ⇒ n → n (λ)
blaues Licht: 400 nm (0.4µm)rotes Licht: 780 nm (0.78µm)
Brechungsindizes furλ = 589 nm (gelbe Na Linie)
Vakuum n = 1 (exakt) Glas n∼ 1.4 - 2.9 (Sorte)Luft n = 1.00029 Plexiglas n = 1.49Wasser n = 1.33 Diamant n = 2.42
Versuche:
→ Licht wirft Schatten→ Abbildung von Gegen-standen (geometrische Optik)
→ Werden die Strukturen vergleichbar mit der Wel-lenlange des Lichts (Spalt, Lochblende) kommtes zu Interferenz- und Beugungseffekten (Wel-lenoptik)
3.2 Reflexion und Brechung
Trifft ein Lichtstrahl auf eine Grenzflache zweier Me-dien mit unterschiedlichen Brechungsindizesn1 6= n2,wird ein Teil des Lichtes reflektiert, ein Teil gelangt indas Medium mitn2 (vgl. mechanische Wellen). Trifftder Lichtstrahl nicht senkrecht auf die Grenzflache an-dert sich die Richtung des Lichtstrahls (Brechung).
Versuch:Reflexion und Brechung eines Laserstrahlesan einer Wasseroberflache.
Beschreibung dieser Phanomene mit Hilfe des Fer-mat’schen Prinzips:Die Laufzeit des Lichts zwischen zwei Punkten ist mi-nimal (nicht der Weg).D.h. auch, dass sich Lichtstrahlen in einem optisch ho-mogenen Medium geradlinig ausbreiten.
3.2.1 Reflexion
Versuch:Reflexion an einem Spiegel
0 d
b
B
A
a l1
l2
θ1 θ2
..
Beobachtung: Einfallwinkel gleich Ausfallwinkel
Die Laufzeit des Lichtstrahls betragtt(x) = L(x)/c,wobei L = l1 + l2. Da sich das Medium in dem sichder Lichtstrahl von PunktA nach PunktB bewegtnicht andert giltt(x) ist minimal, wennl(x) minimalist.
L(x) =√
a2 + x2 +√
b2 + (d − x)2
Ableitung:
dL
dx=
1
2
2x√a2 + x2
+1
2
2x − 2d√
b2 + (d − x)2
Minimum furdL
dx= 0
x√
a2 + x20
=d − x
√
b2 + (d − x)2⇒ x
l1=
d − x
l2
Dabei ist sin θ1 =x
l1und sin θ2 =
d − x
l2
⇒ Fur die Reflexion an einer Oberflache:
Reflexionsgesetz:sin θ1 = sin θ2 ⇔ θ1 = θ2
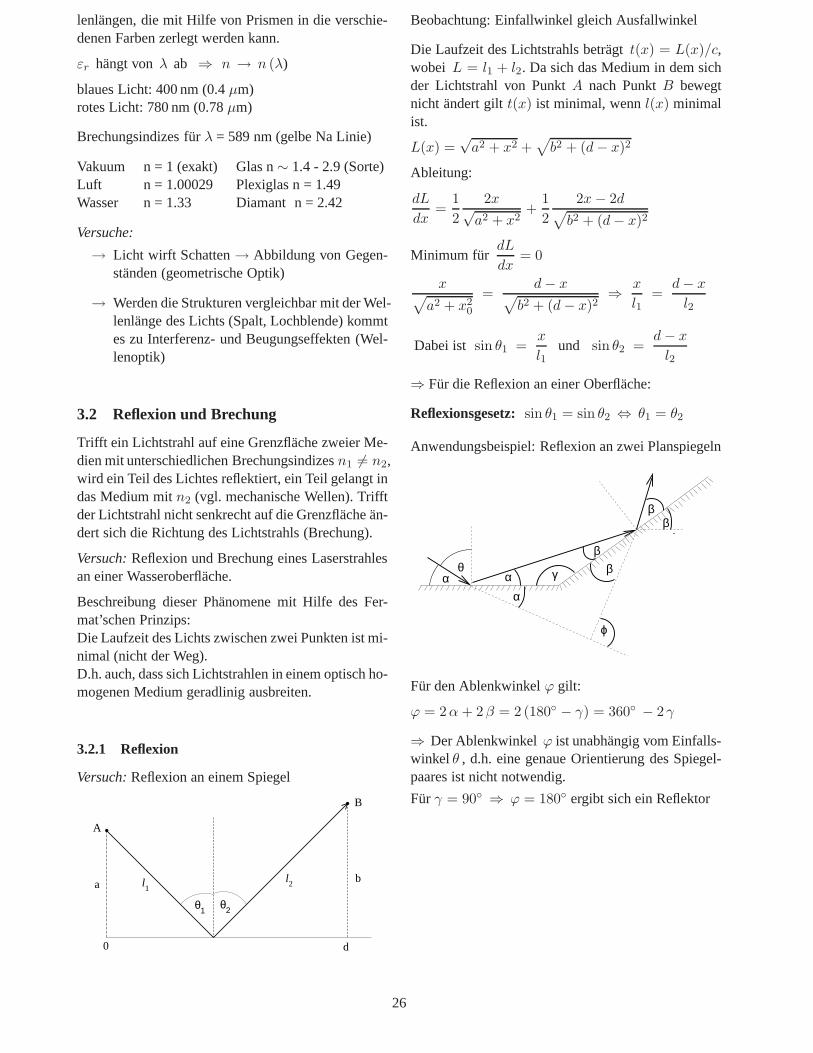
Anwendungsbeispiel: Reflexion an zwei Planspiegeln
ϕ
αθ
α γ
β
β
α
β
β
Fur den Ablenkwinkelϕ gilt:
ϕ = 2α + 2β = 2 (180◦ − γ) = 360◦ − 2 γ
⇒ Der Ablenkwinkelϕ ist unabhangig vom Einfalls-winkelθ , d.h. eine genaue Orientierung des Spiegel-paares ist nicht notwendig.
Furγ = 90◦ ⇒ ϕ = 180◦ ergibt sich ein Reflektor
26

3.2.2 Brechung
Erklarung der Brechung mit dem Fermat’schen Prin-zip: Ist n2 > n1 , ist die Lichtgeschwindigkeitc2 <c1. D.h. der Weg im dichteren Medium (n2 ) ist klei-ner als im dunneren Medium (n1 ).
n1
θ1
θ2
n2
a
A
B
b
x d
Herleitung des Brechungsgesetzes:
t =l1c1
+l2c2
=l1 n1
c+
l2 n2
c
⇒ c t(x) = n1
√
a2 + x2 + n2
√
b2 + (d − x)2
Ableitung:
cdt
dx= n1
x√a2 + x2
+ n2x − d
√
b2 + (d − x)2
Minimum fur t(x) furdt
dx= 0
n1x√
a2 + x2= n2
d − x√
b2 + (d − x)2
⇒ x
l1= n2
d − x
l2
Mit sin θ1 =x
l1und sin θ2 =
d − x
l2folgt das
Brechungsgesetz:n1 sin θ1 = n2 sin θ2
Spezialfall:Totalreflexion
Brechung an einer Grenzflache mitn2 < n1
Fur den Brechungswinkel im Mediumn2 ergibt sich:
sin θ2 =n1
n2sin θ1
Fur sin θ1 =n2
n1ist sin θ2 = 1 ⇒ θ2 = 90◦
D.h. der einfallende Lichtstrahl kann nicht in Mediumn2 eindringen und es kommt zu Totalreflexion.
n
n
1
2
θ
θ
1
2
z.B. Luft
z.B. Wasser
n < n1 2
Fur die Grenzflache Wasser – Luft (Versuch) ergibtsich ein kritischer Winkel fur die Totalreflexion von:
sin θ1 =1
1.33⇒ θ1 = 48◦
Damit kann ein Laserstrahl durch einen gekrummtenWasserstrahl geschickt werden (Versuch).
Anwendungsbeispiel: Lichtleiter (Versuch)Ein Laserstrahl kann durch einen Lichtleiter mit Kno-ten geschickt werden (Glasfaserkabel).
3.3 Optische Abbildungen
3.3.1 Hohlspiegel
Konkaver, spharischer Spiegel, der einem parallel zuroptischen Achse einfallenden Lichtstrahl im Brenn-punkt F fokusiert.
r
f
Aufgrund des Reflexionsgesetzes gilt fur den Brenn-punkt: f = 1
2r , wobei r der Krummungsradius des
Spiegels ist.
Versuch:Das Licht einer Bogenlampe wird im Brenn-punkt eines Hohlspiegels fokussiert. Die Energiedich-te im Fokus reicht aus um ein Streichholz zu entzunden.
Anwendung von Hohlspiegeln in der Astronomie zurAbbildung und Vergroßerung von Sternen.
27

A
FB
a
bf
B ist der Schnittpunkt zweier Lichtstrahlen von PunktA. D.h. in B ist die Abbildung scharf und die Inten-sitat durch den großeren Raumwinkel, uber den derHohlspiegel das Licht sammelt, ebenfall großer. Ausgeometrischen Grunden ergibt sich der Abbildungs-maßtab (Vergroßerung)Γ zu:
Γ =b
a=
f
a − f
3.3.2 Prisma
Prismen sind dreikantige Glaskorper und werden zurAblenkung von Strahlen und zur Zerlegung des Lichtsin seine Farben verwendet.
α1 α2
β1 β2
n
ϕ
γ
γ = 180◦ − (90◦ − β1) − (90◦ − β2)
γ = β1 + β2
An den beiden Grenzflachen gelten die Brechungsge-setzesin α1 = n sin β1 und sin α2 = n sin β2
Fur den Ablenkwinkelϕ folgt:
ϕ = (α1 − β1) + (α2 − β2) = α1 + α2 − γ
Der Ablenkwinkel wird minimal, wennα1 = α2 ⇒β1 = β2 = γ/2
Aufgrund der Abhangigkeit des Brechungsindexn vonder Wellenlangeλ wird naturliches Licht in seine Spek-tralfarben zerlegt. Bei normaler Dispersion nimmtn(λ)mit zunehmendenλ ab. D.h.dn/dλ < 0
Versuch:Dispersion verschiedener Prismen
γ
n λ = 500 nm (blau)
= 700 nm (rot)λ
Brechungsindizes fur Kronglas
Farbe λ(nm) n
blau 486 1.5157
gelb 590 1.5100
rot 656 1.5076
Der Brechungsindexn(λ) eines Materials kann souber die Messung der Winkel bestimmt werden.
3.3.3 Linse
Bei einer Lochkamera (Versuch) wird die Abbildungmit kleinerem Blendendurchmesser scharfer. Problem:Die Helligkeit nimmt ebenfalls ab.
GegenstandBlende
Bild
Bei der Abbildung von Gegenstanden uber Linsen wer-den die Lichtstrahlen fokussiert.
LinseGegenstand
Herleitung der Abbildungsgleichung einer Linse uberdas Brechungsgesetz:
Brechung an der ersten Oberflache:sin θ1 = n sin θ3
28
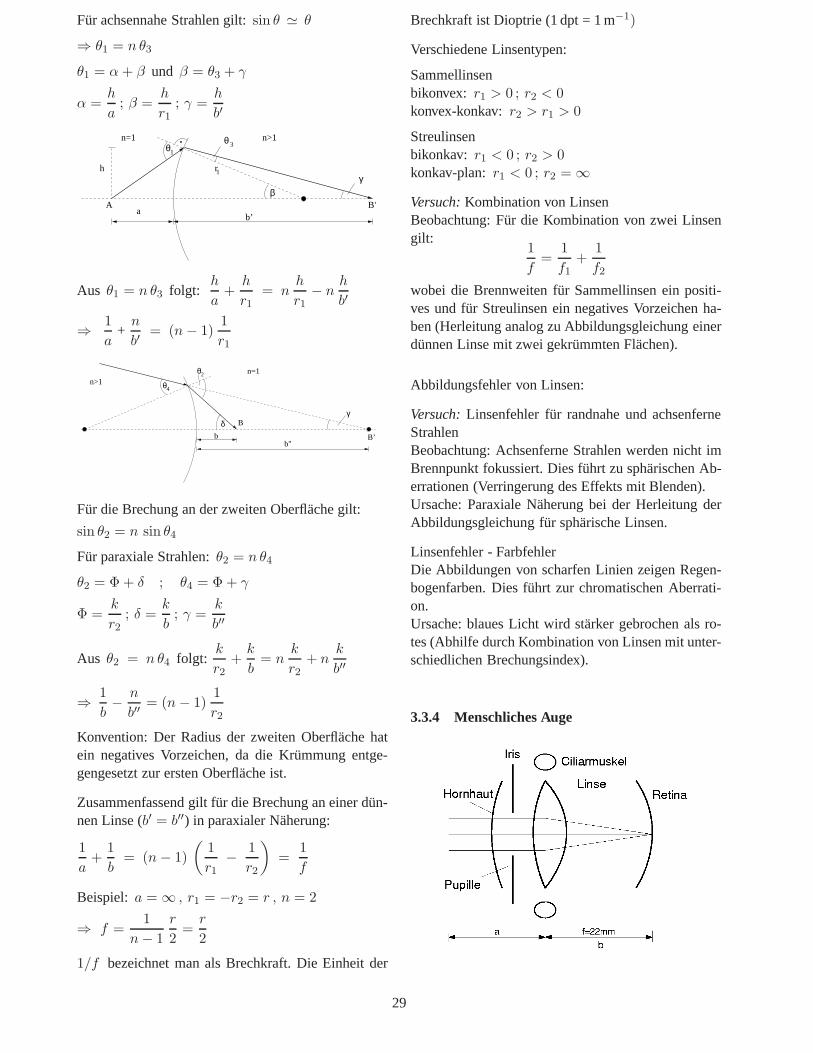
Fur achsennahe Strahlen gilt:sin θ ' θ
⇒ θ1 = n θ3
θ1 = α + β und β = θ3 + γ
α =h
a; β =
h
r1
; γ =h
b′
θ1
A
n=1
h
β
r1
θ3n>1
B’a
γ
b’
Aus θ1 = n θ3 folgt:h
a+
h
r1= n
h
r1− n
h
b′
⇒ 1
a+
n
b′= (n − 1)
1
r1
b
n>1n=1
Bδγ
B’
θ
θ2
4
b"
Fur die Brechung an der zweiten Oberflache gilt:
sin θ2 = n sin θ4
Fur paraxiale Strahlen:θ2 = n θ4
θ2 = Φ + δ ; θ4 = Φ + γ
Φ =k
r2; δ =
k
b; γ =
k
b′′
Aus θ2 = n θ4 folgt:k
r2+
k
b= n
k
r2+ n
k
b′′
⇒ 1
b− n
b′′= (n − 1)
1
r2
Konvention: Der Radius der zweiten Oberflache hatein negatives Vorzeichen, da die Krummung entge-gengesetzt zur ersten Oberflache ist.
Zusammenfassend gilt fur die Brechung an einer dun-nen Linse (b′ = b′′) in paraxialer Naherung:
1
a+
1
b= (n − 1)
(
1
r1
− 1
r2
)
=1
f
Beispiel: a = ∞ , r1 = −r2 = r , n = 2
⇒ f =1
n − 1
r
2=
r
2
1/f bezeichnet man als Brechkraft. Die Einheit der
Brechkraft ist Dioptrie (1 dpt = 1 m−1)
Verschiedene Linsentypen:
Sammellinsenbikonvex: r1 > 0 ; r2 < 0konvex-konkav:r2 > r1 > 0
Streulinsenbikonkav: r1 < 0 ; r2 > 0konkav-plan:r1 < 0 ; r2 = ∞
Versuch:Kombination von LinsenBeobachtung: Fur die Kombination von zwei Linsengilt:
1
f=
1
f1+
1
f2
wobei die Brennweiten fur Sammellinsen ein positi-ves und fur Streulinsen ein negatives Vorzeichen ha-ben (Herleitung analog zu Abbildungsgleichung einerdunnen Linse mit zwei gekrummten Flachen).
Abbildungsfehler von Linsen:
Versuch:Linsenfehler fur randnahe und achsenferneStrahlenBeobachtung: Achsenferne Strahlen werden nicht imBrennpunkt fokussiert. Dies fuhrt zu spharischen Ab-errationen (Verringerung des Effekts mit Blenden).Ursache: Paraxiale Naherung bei der Herleitung derAbbildungsgleichung fur spharische Linsen.
Linsenfehler - FarbfehlerDie Abbildungen von scharfen Linien zeigen Regen-bogenfarben. Dies fuhrt zur chromatischen Aberrati-on.Ursache: blaues Licht wird starker gebrochen als ro-tes (Abhilfe durch Kombination von Linsen mit unter-schiedlichen Brechungsindex).
3.3.4 Menschliches Auge
29
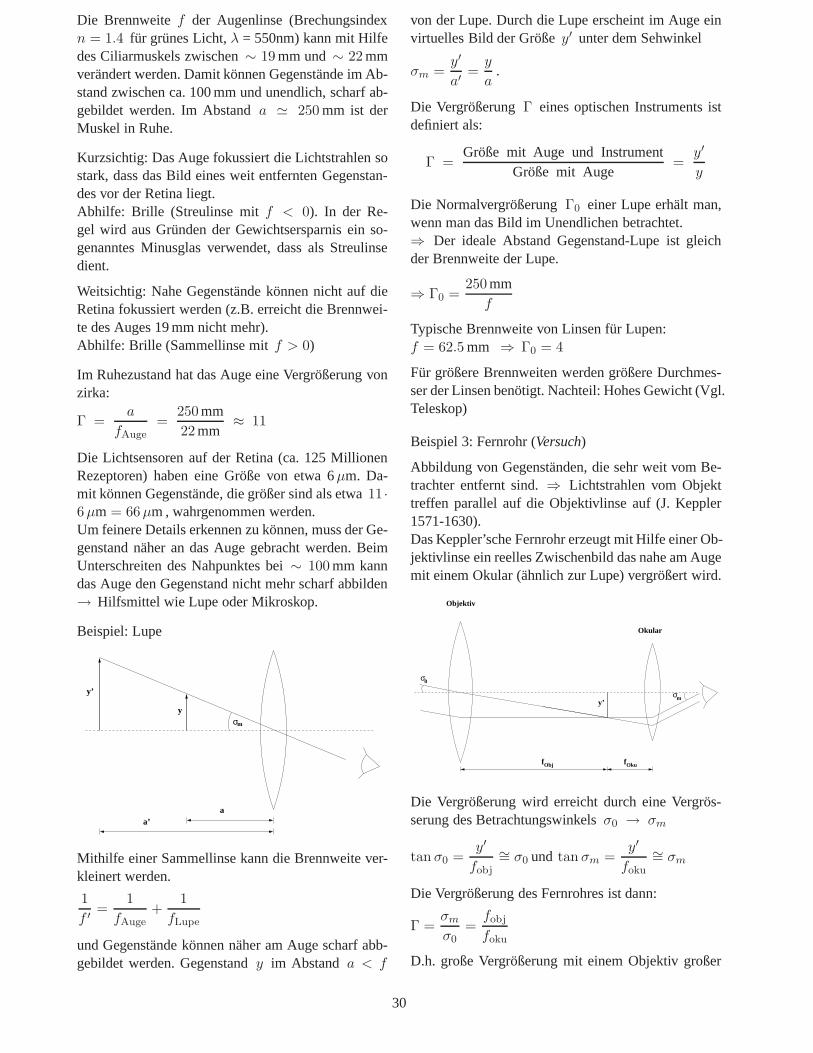
Die Brennweitef der Augenlinse (Brechungsindexn = 1.4 fur grunes Licht,λ = 550nm) kann mit Hilfedes Ciliarmuskels zwischen∼ 19 mm und∼ 22 mmverandert werden. Damit konnen Gegenstande im Ab-stand zwischen ca. 100 mm und unendlich, scharf ab-gebildet werden. Im Abstanda ' 250 mm ist derMuskel in Ruhe.
Kurzsichtig: Das Auge fokussiert die Lichtstrahlen sostark, dass das Bild eines weit entfernten Gegenstan-des vor der Retina liegt.Abhilfe: Brille (Streulinse mitf < 0). In der Re-gel wird aus Grunden der Gewichtsersparnis ein so-genanntes Minusglas verwendet, dass als Streulinsedient.
Weitsichtig: Nahe Gegenstande konnen nicht auf dieRetina fokussiert werden (z.B. erreicht die Brennwei-te des Auges 19 mm nicht mehr).Abhilfe: Brille (Sammellinse mitf > 0)
Im Ruhezustand hat das Auge eine Vergroßerung vonzirka:
Γ =a
fAuge
=250 mm22 mm
≈ 11
Die Lichtsensoren auf der Retina (ca. 125 MillionenRezeptoren) haben eine Große von etwa 6µm. Da-mit konnen Gegenstande, die großer sind als etwa11 ·6µm = 66µm , wahrgenommen werden.Um feinere Details erkennen zu konnen, muss der Ge-genstand naher an das Auge gebracht werden. BeimUnterschreiten des Nahpunktes bei∼ 100 mm kanndas Auge den Gegenstand nicht mehr scharf abbilden→ Hilfsmittel wie Lupe oder Mikroskop.
Beispiel: Lupe
y’
mσy
a’a
Mithilfe einer Sammellinse kann die Brennweite ver-kleinert werden.
1
f ′=
1
fAuge+
1
fLupe
und Gegenstande konnen naher am Auge scharf abb-gebildet werden. Gegenstandy im Abstand a < f
von der Lupe. Durch die Lupe erscheint im Auge einvirtuelles Bild der Großey′ unter dem Sehwinkel
σm =y′
a′=
y
a.
Die VergroßerungΓ eines optischen Instruments istdefiniert als:
Γ =Große mit Auge und Instrument
Große mit Auge=
y′
y
Die NormalvergroßerungΓ0 einer Lupe erhalt man,wenn man das Bild im Unendlichen betrachtet.⇒ Der ideale Abstand Gegenstand-Lupe ist gleichder Brennweite der Lupe.
⇒ Γ0 =250 mm
f
Typische Brennweite von Linsen fur Lupen:f = 62.5 mm ⇒ Γ0 = 4
Fur großere Brennweiten werden großere Durchmes-ser der Linsen benotigt. Nachteil: Hohes Gewicht (Vgl.Teleskop)
Beispiel 3: Fernrohr (Versuch)
Abbildung von Gegenstanden, die sehr weit vom Be-trachter entfernt sind.⇒ Lichtstrahlen vom Objekttreffen parallel auf die Objektivlinse auf (J. Keppler1571-1630).Das Keppler’sche Fernrohr erzeugt mit Hilfe einer Ob-jektivlinse ein reelles Zwischenbild das nahe am Augemit einem Okular (ahnlich zur Lupe) vergroßert wird.
Objektiv
Okular
ffObj Oku
σm
σ0
y’
Die Vergroßerung wird erreicht durch eine Vergros-serung des Betrachtungswinkelsσ0 → σm
tan σ0 =y′
fobj
∼= σ0 und tan σm =y′
foku
∼= σm
Die Vergroßerung des Fernrohres ist dann:
Γ =σm
σ0=
fobj
foku
D.h. große Vergroßerung mit einem Objektiv großer
30
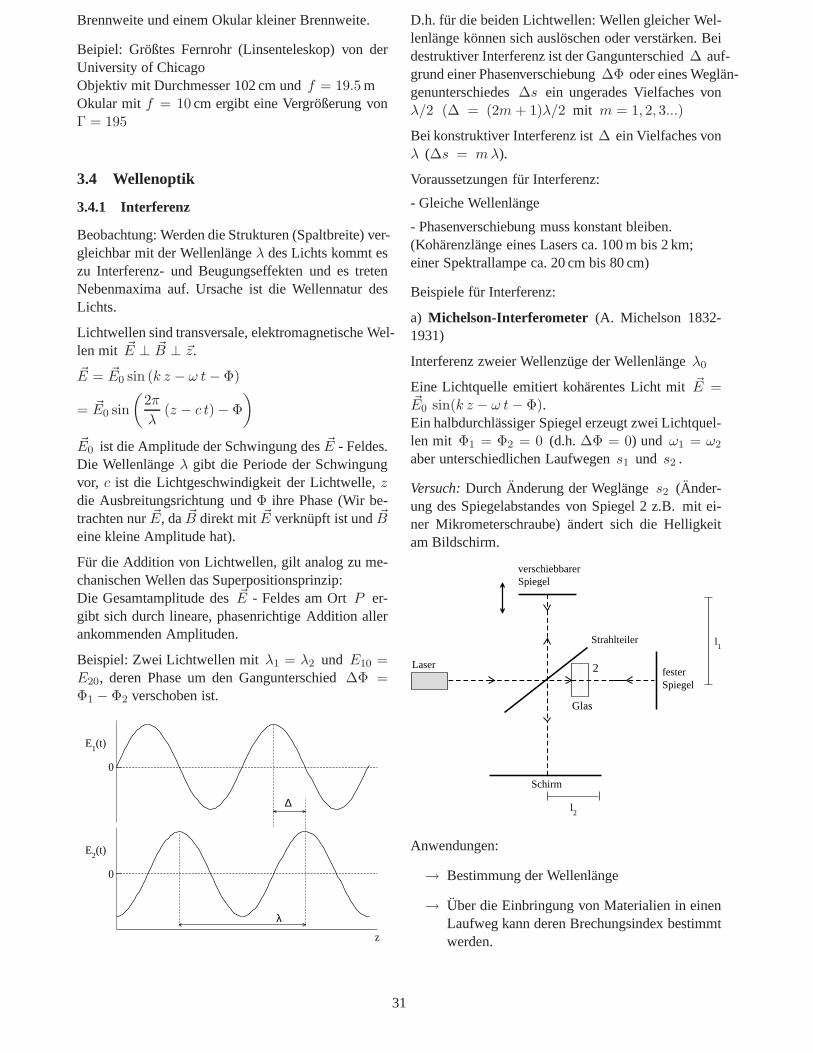
Brennweite und einem Okular kleiner Brennweite.
Beipiel: Großtes Fernrohr (Linsenteleskop) von derUniversity of ChicagoObjektiv mit Durchmesser 102 cm undf = 19.5 mOkular mit f = 10 cm ergibt eine Vergroßerung vonΓ = 195
3.4 Wellenoptik
3.4.1 Interferenz
Beobachtung: Werden die Strukturen (Spaltbreite) ver-gleichbar mit der Wellenlangeλ des Lichts kommt eszu Interferenz- und Beugungseffekten und es tretenNebenmaxima auf. Ursache ist die Wellennatur desLichts.
Lichtwellen sind transversale, elektromagnetische Wel-len mit ~E ⊥ ~B ⊥ ~z.
~E = ~E0 sin (k z − ω t − Φ)
= ~E0 sin
(
2π
λ(z − c t) − Φ
)
~E0 ist die Amplitude der Schwingung des~E - Feldes.Die Wellenlangeλ gibt die Periode der Schwingungvor, c ist die Lichtgeschwindigkeit der Lichtwelle,zdie Ausbreitungsrichtung undΦ ihre Phase (Wir be-trachten nur~E, da ~B direkt mit ~E verknupft ist und~Beine kleine Amplitude hat).
Fur die Addition von Lichtwellen, gilt analog zu me-chanischen Wellen das Superpositionsprinzip:Die Gesamtamplitude des~E - Feldes am OrtP er-gibt sich durch lineare, phasenrichtige Addition allerankommenden Amplituden.
Beispiel: Zwei Lichtwellen mitλ1 = λ2 und E10 =E20, deren Phase um den Gangunterschied∆Φ =Φ1 − Φ2 verschoben ist.
0
E1(t)
z
0
E2(t)
λ
∆
D.h. fur die beiden Lichtwellen: Wellen gleicher Wel-lenlange konnen sich ausloschen oder verstarken. Beidestruktiver Interferenz ist der Gangunterschied∆ auf-grund einer Phasenverschiebung∆Φ oder eines Weglan-genunterschiedes∆s ein ungerades Vielfaches vonλ/2 (∆ = (2m + 1)λ/2 mit m = 1, 2, 3...)
Bei konstruktiver Interferenz ist∆ ein Vielfaches vonλ (∆s = m λ).
Voraussetzungen fur Interferenz:
- Gleiche Wellenlange
- Phasenverschiebung muss konstant bleiben.(Koharenzlange eines Lasers ca. 100 m bis 2 km;einer Spektrallampe ca. 20 cm bis 80 cm)
Beispiele fur Interferenz:
a) Michelson-Interferometer (A. Michelson 1832-1931)
Interferenz zweier Wellenzuge der Wellenlangeλ0
Eine Lichtquelle emitiert koharentes Licht mit~E =~E0 sin(k z − ω t − Φ).Ein halbdurchlassiger Spiegel erzeugt zwei Lichtquel-len mit Φ1 = Φ2 = 0 (d.h.∆Φ = 0) und ω1 = ω2
aber unterschiedlichen Laufwegens1 und s2 .
Versuch:Durch Anderung der Weglanges2 (Ander-ung des Spiegelabstandes von Spiegel 2 z.B. mit ei-ner Mikrometerschraube) andert sich die Helligkeitam Bildschirm.
Glas
2
verschiebbarer Spiegel
Laser
Schirm
festerSpiegel
l2
l1
Strahlteiler
Anwendungen:
→ Bestimmung der Wellenlange
→ Uber die Einbringung von Materialien in einenLaufweg kann deren Brechungsindex bestimmtwerden.
31

→ Interferenzmikroskop: Spiegel 1 ist eine glatteFlache hoher Gute, Spiegel 2 ein Prufling. DasInterferenzmuster zeigt Rauhigkeit und Ober-flachenform der Oberflache des Pruflings (Ge-nauigkeit:∆s ' λ0/100 ' 1 nm).
b) Planparallele Platten
n= 1
n= 1
B
CA
β
α α
Beobachter
d Brechungsindex n
Dα
Fallt eine Lichtwelle unter dem Einfallswinkelα aufeine planparallele durchsichtige Platte mit dem Bre-chungsindexn und der Dicked , wird ein Teil derWelle reflektiert und ein Teil gebrochen. Die gebro-chene Welle wird an der unteren Grenzschicht erneut(teilweise) reflektiert und uberlagert die direkt reflek-tierte Teilwelle.Dies fuhrt zu einem Gangunterschied∆ zwischenden reflektierten Teilwellen. Zusatzlich zum Wegunter-schied muss die kleinere Ausbreitungsgeschwindigkeitin der Platte berucksichtigt werden:
∆ = n(AB + BC) − AD ;
(
cm =λ
n
)
=2n d
cos β− 2 d tan β sin α
AD = sin α AC ; AC = 2 d tan β
Aus dem Brechungsgesetzsinα = n sin β folgt mitcos2 β + sin2 β = 1:
∆ =2n d
cos β− 2n d sin2 β
cos β= 2n d cos β
= 2n d
√
1 − sin2 β
= 2 d√
n2 − sin2 α +λ
2
Das λ2
kommt von dem “Phasensprung” umπ beiReflexion am optisch dichteren Medium (vgl. fest ein-gespanntes Ende einer Saite bei mech. Wellen).
D.h. fur einen Gangunterschied von∆ = m λ nimmtein Beobachter Helligkeit wahr, fur∆ = (m − 1
2)λ
keine Intensitat.
Anwendung: Entspiegelung von LinsenVersuch:Vergutete Glasplatte. Beobachtung: Reflexi-on nimmt bei verguteter Glasscheibe im Vergleich deut-lich ab und die Transmission nimmt zu.
d
n=1.38n=1 n=1.5 (Glas)(MgF )2
α
Fur kleine Einfallswinkelα (nahezu senkrechten Ein-fall) wird fur eine Dicked = λ
4 n der Gangunterschiedgeradeλ
2(erneuter Phasensprung umλ
2, da die MgF2
einen kleineren Brechungsindex hat als das Glas).⇒ keine reflektierte Intensitat. Die gesamte Intensitatgeht in den transmittierten Strahl (eine Vergutung er-folgt zumeist durch mehrere Schichten).
c) Interferenzfilter
Aufgrund vond = λ4 n hangt die Intensitat des reflek-
tierten Strahls von der Wellenlange ab. Damit kannein Interferenzfilter realisiert werden, der z.B. grunesLicht reflektiert, wahrend er fur rotes Licht durchlassigist (Versuch).
d) Newton’sche Ringe
Wenn eine optisch durchlassige Schicht auf einer spie-gelnden Schicht aufliegt, beobachtet man Interferen-zen, wenn die Auflage nicht perfekt ist (Versuch).
Anwendung:
- Uberprufung von Planschliffen (bis auf Bruch-teil einer Wellenlange)
- Uberprufung von Linsenformen
n
nd
21
Phasensprung um π
32

e)Farben dunner Schichten(z.B. Olfilme)
Bei Beleuchtung mit breitem Spektrum (naturlichesLicht, Gluhlampe ...) kommt es zu Interferenzbedin-gungen fur die unterschiedlichen Wellenlangen.⇒ z.B. farbige Streifen, Muster
3.4.2 Beugung
Huygens’sche Prinzip (C. Huygens 1629-1695):
Jeder Punkt, der von einer einfallenden Welle getrof-fen wird, ist Ausgangspunkt einer ausfallenden Ku-gelwelle mit gleicher Wellenlange.
Versuch:Wasserwellen an einer Barriere mit einer schma-len Offnung.
auslaufende Kugelwellengleicher Wellenlänge
Versuch:Interferenz am DoppelspaltBeobachtung: Es treten Nebenmaxima auf, deren Ab-stand auf dem Bildschirm konstant ist.
θ
y
P
Bildschirm
L
d
Annordnung: Zwei SpalteS1 und S2 mit Abstandd.Annahmen: Die Spaltbreitea ist klein gegenuber demSpaltabstand (Punktquellen) und der Spaltabstand istklein gegenuber dem Abstand zum BildschirmL.Dann gilt fur den Beobachtungswinkel zum PunktPin guter Naherung:θ1 = θ2 = θ
Im PunktP ist der der Gangunterschied∆s zwischenden beiden Kugelwellen:
∆s = d sin θ
D.h. konstruktive Interferenz (Helligkeit) fur:
d sin θ = m λ (m = 0, 1, 2, 3...)
Destruktive Interferenz (Ausloschung) fur:
d sin θ = (2m + 1)λ
2
θs = d sin∆
θ
d
1s
s2
θ
θ
Fur den Abstandym desm-ten Interferenz-Maximumsam Bildschirm gilt:
tan θ =ym
L
Fur kleine Winkel: tan θ ≈ sin θ mit d sin θ =m λ
ym = mλL
d
⇒ Der Abstand zwischen Maxima auf dem Bildschirmist konstant.
Intensitatsbetrachtung:
Fur kleine Weglangenunterschiede gilt fur die beidenWellenzuge:
E1 = A1 sin (ω t)
E2 = A2 sin (ω t + Φ)
wobei fur die Amplituden gilt:A1 = A2 = A0
Aus dem Superpositionsprinzip folgt fur dieUberlagerungder beiden Wellenzuge:
E = E1 + E2 = A0 sin (ω t) + A0 sin (ω t + Φ)
E = 2A0 cos(
12Φ
)
sin (ω t +1
2Φ)
mit sin α+sin β = 2 cos (12
(α − β)) sin (12(α + β))
⇒ fur die Amplitude der resultierenden Welle:
A = 2A0 cos(
12Φ
)
Die IntensitatI ist proportional zum Quadrat der Am-plitude
I ∝ 4A20 cos2
(
12Φ
)
I ist maximal fur:Φ = m 2π (m = 0, 1, 2, ...)
I ist minimal fur: Φ = m π
33
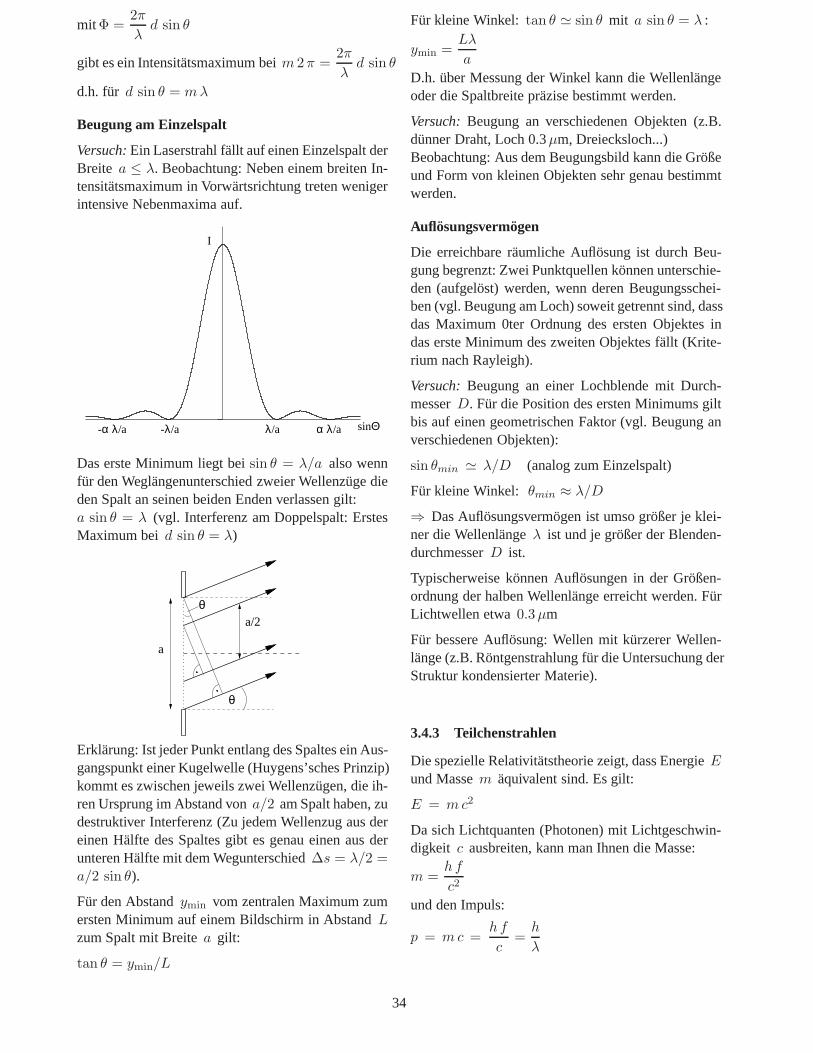
mit Φ =2π
λd sin θ
gibt es ein Intensitatsmaximum beim 2π =2π
λd sin θ
d.h. fur d sin θ = m λ
Beugung am Einzelspalt
Versuch:Ein Laserstrahl fallt auf einen Einzelspalt derBreite a ≤ λ. Beobachtung: Neben einem breiten In-tensitatsmaximum in Vorwartsrichtung treten wenigerintensive Nebenmaxima auf.
sinΘ
I
λ/a α λ/a-λ/a-α λ/a
Das erste Minimum liegt beisin θ = λ/a also wennfur den Weglangenunterschied zweier Wellenzuge dieden Spalt an seinen beiden Enden verlassen gilt:a sin θ = λ (vgl. Interferenz am Doppelspalt: ErstesMaximum beid sin θ = λ)
a
θ
a/2θ
Erklarung: Ist jeder Punkt entlang des Spaltes ein Aus-gangspunkt einer Kugelwelle (Huygens’sches Prinzip)kommt es zwischen jeweils zwei Wellenzugen, die ih-ren Ursprung im Abstand vona/2 am Spalt haben, zudestruktiver Interferenz (Zu jedem Wellenzug aus dereinen Halfte des Spaltes gibt es genau einen aus derunteren Halfte mit dem Wegunterschied∆s = λ/2 =a/2 sin θ).
Fur den Abstandymin vom zentralen Maximum zumersten Minimum auf einem Bildschirm in AbstandLzum Spalt mit Breitea gilt:
tan θ = ymin/L
Fur kleine Winkel:tan θ ' sin θ mit a sin θ = λ :
ymin =Lλ
a
D.h. uber Messung der Winkel kann die Wellenlangeoder die Spaltbreite prazise bestimmt werden.
Versuch:Beugung an verschiedenen Objekten (z.B.dunner Draht, Loch 0.3µm, Dreiecksloch...)Beobachtung: Aus dem Beugungsbild kann die Großeund Form von kleinen Objekten sehr genau bestimmtwerden.
Auflosungsvermogen
Die erreichbare raumliche Auflosung ist durch Beu-gung begrenzt: Zwei Punktquellen konnen unterschie-den (aufgelost) werden, wenn deren Beugungsschei-ben (vgl. Beugung am Loch) soweit getrennt sind, dassdas Maximum 0ter Ordnung des ersten Objektes indas erste Minimum des zweiten Objektes fallt (Krite-rium nach Rayleigh).
Versuch:Beugung an einer Lochblende mit Durch-messerD. Fur die Position des ersten Minimums giltbis auf einen geometrischen Faktor (vgl. Beugung anverschiedenen Objekten):
sin θmin ' λ/D (analog zum Einzelspalt)
Fur kleine Winkel: θmin ≈ λ/D
⇒ Das Auflosungsvermogen ist umso großer je klei-ner die Wellenlangeλ ist und je großer der Blenden-durchmesserD ist.
Typischerweise konnen Auflosungen in der Großen-ordnung der halben Wellenlange erreicht werden. FurLichtwellen etwa0.3µm
Fur bessere Auflosung: Wellen mit kurzerer Wellen-lange (z.B. Rontgenstrahlung fur die Untersuchung derStruktur kondensierter Materie).
3.4.3 Teilchenstrahlen
Die spezielle Relativitatstheorie zeigt, dass EnergieEund Massem aquivalent sind. Es gilt:
E = m c2
Da sich Lichtquanten (Photonen) mit Lichtgeschwin-digkeit c ausbreiten, kann man Ihnen die Masse:
m =h f
c2
und den Impuls:
p = m c =h f
c=
h
λ
34

zuordnen. Umgekehrt kann einem Teilchen, z.B. Elek-tron oder Neutron, uber seinen Impulsp eine Wel-lenlangeλt = h/p zugeordnet werden. Diesen Zu-sammenhang bezeichnet man alsWelle-Teilchen Dua-lismus.
Allgemein gilt fur den relativistischen Impuls einesTeilchens:
~p =m0
√
1 − v2/c2~v
Dabei ist m0 die Ruhemasse des Teilchens. Ist dieGeschwindigkeitv der Teilchen klein gegenuber derLichtgeschwindigkeit, ergibt sich fur die Wellenlangeλt des Teilchens die de Broglie Wellenlange:
λt =h
m0 v
Beispiel: Ein Neutron fliegt mit der Geschwindigkeitv0 = 1800 m/s (thermische Neutronen). Fur seine Wel-lenlange ergibt sich dann:
λn =h
mn v0=
6.626 · 10−34 J s1.675 · 10−27 kg1800 m/s
≈ 2 A
D.h. Neutronen sind geeignet die Struktur der Materieauf atomarer Ebene aufzulosen, da Atome in konden-sierter Materie typischerweise Abstande von einigenAngstrom (1 A = 10−10 m) haben.
Beispiel: Bragg Reflexion an einem Si Kristall.
θ
θ
d
Ist der Gangunterschied zwischen reflektierten Teil-wellen ein ganzzahliges Vielfaches der Wellenlangekommt es zu konstruktiver Interferenz.
2 d sin θ = i λ i = 1, 2, 3...
D.h. fur eine gegebene Wellenlangeλ, ergibt sich un-ter einem Streuwinkel von2θ Intensitat (Bragg Re-flex) wenn es in der Probe einen Netzebenenabstand:
d =i λ
2 sin θgibt (Bragg Bedingung).
35

Literatur
Lehrbucher
• P. A. Tipler, G. Mosca,Physik fur Wissenschaftler und Ingenieure, Spektrum Akademischer Verlag 2004(ca. 1500 Seiten)
• W. Demtroder,Experimentalphysik 1 – Mechanik und WarmeSpringer 2003 undExperimentalphysik 2 –Elektrizitat und OptikSpringer 2004 (je ca. 500 Seiten)
• K. Luders und R. O. Pohl,Pohls Einfuhrung in die Physik – Mechanik, Akustik und Warmelehre, Springer2004 undElektrizitat und OptikSpringer 2005 (je ca. 350 Seiten)
Formel- und Tabellensammlungen
• H. Kuchling,Taschenbuch der Physik, Hanser Fachbuchverlag 2004 (ca. 700 Seiten)
• H. Stocker,Taschenbuch der Physik, Verlag Harri Deutsch 2004 (ca. 1000 Seiten)
Weitere Literatur
• H. Schulz,Physik mit Bleistift, Verlag Harri Deutsch 2004 (ca. 400 Seiten)
• T. Dorfmuller, W. Hering, K. Stierstadt,Bergmann–Schafer: Lehrbuch der Experimentalphysik, de Gruy-ter 1998 (1 Band pro Semester, je ca. 900 Seiten)
• D. Meschede,Gerthsen Physik, Springer 2004 (ca. 1150 Seiten)
• H. Daniel,Physik 1 – Mechanik, Wellen und Warme, de Gruyter 1997 (400 Seiten)
• K. Dransfeld, P. Kienle, G. M. Kalvius,Physik I – Mechanik und Warme, Oldenbourg 2000 (ca. 400Seiten)