physik ii - vorlesung
TRANSCRIPT

Physik II - Vorlesung
Prof. Dr. Götz S. UhrigProf. Dr. Shaukat Khan
27. Mai 2018
1

Vorbemerkung
Das vorliegende Skript zur Physik II ersetzt nicht den regelmäßigen Besuch derVorlesungen. Es ist als Ergänzung gedacht, zum Nacharbeiten oder zur Vorbereitungauf Klausuren und Prüfungen. Deshalb sollten alle Formeln und Aussagen immerkritisch betrachtet werden, es könnten noch Druckfehler enthalten sein! WesentlicherBestandteil der Vorlesung Physik II sind die Übungen. Es ist unbedingt erforderlich,den Stoff durch eigenständiges Bearbeiten von Übungsaufgaben zu vertiefen.
Für Fehlermeldungen und Verbesserungsvorschläge bin ich jederzeit dankbar. Siekönnen per E-Mail an Alexey Schwarzmann ([email protected]) ge-schickt werden.
Die jeweils aktuellste Version dieses Skripts finden Sie hier.
Ich danke an dieser Stelle den Skriptschreibern Leon Xinchen Yu und Alexey Schwarz-mann, für das Überarbeiten des Skripts. Für hilfreichen Anmerkungen bedanken ichmich außerdem bei Sarah Dinkelacker, Lukas Hofmann, Lando Korten, Felix Sebas-tian Kratz, Ludwig Neste, Karina Overhoff und Axel Vogt.
Götz S. Uhrig
2

Inhaltsverzeichnis
1 Elektrostatik 5
1.1 Elektrische Ladung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Coulombsches Gesetz . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Das elektrische Feld . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3.1 Definition . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3.2 Elektrische Feldlinien . . . . . . . . . . . . . . . . . . . . . . . 7
1.3.3 Der elektrische Fluss . . . . . . . . . . . . . . . . . . . . . . . 8
1.3.4 Gauß’scher Satz . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3.5 Influenz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.3.6 Elementarladung . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.4 Potential und Spannung . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.4.1 Arbeit im elektrischen Feld . . . . . . . . . . . . . . . . . . . . 13
1.4.2 Poisson- und Laplacegleichung . . . . . . . . . . . . . . . . . . 17
1.5 Theoretische Ergänzungen zu elektrischem Feld und Potential . . . . 18
1.5.1 Coulomb’sches Gesetz . . . . . . . . . . . . . . . . . . . . . . 18
1.5.2 Elektrisches Feld . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.5.3 Dirac’sche Delta-Distribution . . . . . . . . . . . . . . . . . . 23
1.5.4 Elektrostatisches Potential . . . . . . . . . . . . . . . . . . . . 27
1.6 Vektoranalysis, Integralsätze . . . . . . . . . . . . . . . . . . . . . . . 30
1.6.1 Gradient, Rotation, Divergenz . . . . . . . . . . . . . . . . . . 30
1.6.2 Satz von Gauß . . . . . . . . . . . . . . . . . . . . . . . . . . 32
1.6.3 Satz von Stokes . . . . . . . . . . . . . . . . . . . . . . . . . . 37
1.6.4 Vektoranalysis in krummlinigen Koordinaten . . . . . . . . . . 39
1.7 Maxwellgleichung, Gauß’sches Gesetz . . . . . . . . . . . . . . . . . . 42
1.8 Maxwellgleichungen, Poisson-Gleichung, Randwertprobleme . . . . . . 48
1.8.1 Poisson-Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . 48
1.8.2 Randwertprobleme . . . . . . . . . . . . . . . . . . . . . . . . 49
1.8.3 Elektrische Felder in Leitern . . . . . . . . . . . . . . . . . . . 59
1.9 Multipole . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
1.9.1 Dipol und Quadrupol . . . . . . . . . . . . . . . . . . . . . . . 64
1.9.2 Elektrische Multipolentwicklung . . . . . . . . . . . . . . . . . 69
1.10 Der Kondensator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3

1.10.1 Die Kapazität . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
1.10.2 Platten- und Kugelkondensator . . . . . . . . . . . . . . . . . 75
1.10.3 Parallel- und Reihen-(Serien-) Schaltung von Kondensatoren . 77
1.11 Energie des elektrischen Feldes . . . . . . . . . . . . . . . . . . . . . . 77
1.12 Dielektrika im elektrischen Feld . . . . . . . . . . . . . . . . . . . . . 78
1.12.1 Dielektrische Polaristation . . . . . . . . . . . . . . . . . . . . 79
1.12.2 Molekulare Dipolmomente . . . . . . . . . . . . . . . . . . . . 83
1.12.3 Elektrische Feldenergie im Dielektrikum . . . . . . . . . . . . 84
1.13 Polarisierbarkeit und Polarisation: Clausius-Mosotti-Formel . . . . . . 86
2 Elektrischer Strom 89
2.1 Ladungstransport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
2.2 Ohmsches Gesetz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
2.3 Temperaturabhängigkeit des Widerstands . . . . . . . . . . . . . . . . 92
2.4 Netzwerke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
2.4.1 Kirchhoffsche Regeln . . . . . . . . . . . . . . . . . . . . . . . 93
2.4.2 Beispiele für Schaltungen von Widerständen . . . . . . . . . . 95
2.4.3 Widerstände und Kondensatoren . . . . . . . . . . . . . . . . 96
2.5 Strom-Spannungs-Kennlinien . . . . . . . . . . . . . . . . . . . . . . . 97
2.6 Energie und Leistung beim Stromfluss . . . . . . . . . . . . . . . . . 98
2.7 Messen von Strom und Spannung . . . . . . . . . . . . . . . . . . . . 98
2.8 Stromquellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
2.8.1 Galvanische Elemente . . . . . . . . . . . . . . . . . . . . . . . 99
2.8.2 Brennstoffzelle . . . . . . . . . . . . . . . . . . . . . . . . . . 101
2.8.3 Thermische Stromquellen . . . . . . . . . . . . . . . . . . . . . 102
3 Magnetostatik 103
3.1 Ampèresches Kraftgesetz . . . . . . . . . . . . . . . . . . . . . . . . . 104
3.2 Magnetische Flussdichte ~B und Lorentzkraft . . . . . . . . . . . . . . 109
3.3 Maxwellgleichungen und Vektorpotential . . . . . . . . . . . . . . . . 116
4

1 Elektrostatik
1.1 Elektrische Ladung
Experimente zur Reibungselektrizität:
Beobachtungen:
• zwei Arten von Ladungen: positiv, negativ;• gleichnamige Ladungen addieren sich, ungleichnachmige kompensieren sich;• gleichnamige Ladungen stoßen sich ab, ungleichnamige ziehen sich an;• Ladungen sind an massive Teilchen gebunden;• Ladungen sind Vielfache einer Elementarladung;• Ladung bleibt erhalten!!;• Ladungen können getrennt und transportiert werden;• Influenz: Ladungen verschieben sich.
1.2 Coulombsches Gesetz
2 Ladungen Q1 und Q2, Abstand r:
~F = f · Q1 ·Q2
r2· ~er.
Abstoßung bei Q1 ·Q2 > 0; Anziehung bei Q1 ·Q2 < 0.
Es gilt im cgs-Einheiten System: f = 1
⇒ [Q] = [r] · [F ]1/2 = 1 cm dyn1/2
= 1 ESL (Elektrostatische Ladungseinheit) = 1 esu (electrostatic unit).
Das cgs-System ist ein alternatives Einheitensystem. Es basiert auf den Einheiten„centimeter“, „gram“, „second“. Eine Erweiterung des cgs-Systems ist das Gauß’scheEinheitensystem, welches heute hauptsächlich von theoretischen Physikern verwen-det wird.
Es gilt im SI-Einheiten System f = 8, 99 · 109 N m2
C2 und
[Q] = 1 C (Coulomb) = 1 A s;
f =1
4πε0
mit ε0 = 8, 854 · 10−12 C2
N m2
(A2 s4
kg m3
);
ε0 heißt Dielektrizitätskonstante.
Definition: 1 A (Ampere)
Die Einheit 1 Ampere ist die Stärke eines zeitlich unveränderlichen elektrischenStromes, der, durch zwei im Vakuum parallel im Abstand 1 Meter voneinander
5

angeordnete, geradlinige unendlich lange Leiter von vernachlässigbar kleinem Quer-schnitt fließend, zwischen diesen Leitern je ein Meter Leiterlänge elektrodynamischdie Kraft 2 · 10−7 N hervorrufen würde.Das Ampere ist eine Basiseinheit im SI-System.
Abbildung 1.1: Kräfte auf Ladungen
Das Coulombsche Gesetz( ∼ 1785) in SI-Einheiten
~F (~r) =1
4πε0
· Q1 ·Q2
r2· ~er. (1.1)
Beispiel: 2 Protonen im Atomkern
mp = 1, 7 · 10−27 kg
Qp = 1, 6 · 10−19 C = e (Elementarladung)r ≈ 4 · 10−15 m = 4 fm
⇒ FC = 9 · 109 N m2
C2 ·(
1, 6 · 10−19 C
4 · 10−15 m
)2
= 14 N;
zum Vergleich: Gravitationsgesetz:
⇒ FG = 6, 67 · 10−11 N m2
kg2 ·(
1, 7 · 10−27 kg
4 · 10−15 m
)2
= 1, 2 · 10−35 N
⇒ FG << FC .
Ergebnis: Es muss noch eine stärkere attraktive Wechselwirkung existieren, dies istdie „Starke Wechselwirkung“.
6

1.3 Das elektrische Feld
1.3.1 Definition
Kraft auf „Probeladung“ q in Gegenwart einer Ladung Q, normiert auf q:
~E(~r) =~F (~r)
q=
1
q· 1
4πε0
· q ·Qr2· ~er „Elektrisches Feld“
=1
4πε0
· Qr2· ~er;
[E] = 1N
C= 1
kg m
A s3 = 1V
m.
(1.2)
Bei Anwesenheit mehrerer Ladungen Qi oder Ladungsdichte ρ(~r) = dQdV
:
~E(~rq) =1
4πε0
∑i
Qi
|~rq − ~ri|2· ~eiq
=1
4πε0
∑i
Qi~rq − ~ri|~rq − ~ri|3
=1
4πε0
∫V
~rq − ~r|~rq − ~r |3
ρ(~r) dV (Superposition)
(1.3)
1.3.2 Elektrische Feldlinien
Veranschaulichung des Vektorfeldes ~E(~r) durch Feldlinien:
• beginnen und enden an Ladungen;• stets in Richtung von ~E;• per Definition von + nach −;• „Feldliniendichte“ ∝ |F | ∝ |E|, das heißt, bei Punktladung ∝ 1
r2 ;• existieren auch ohne Ladung (zum Beispiel Licht);• folgen der Beschleunigung einer Ladung mit Verzögerung ∝ r
c(elektromagne-
tische Welle);• stehen immer senkrecht auf metallischen Oberflächen.
7

Hier ist zu sehen, wie sich Feldlinien verhalten, wenn sich
die Ladung bewegt.
Abbildung 1.2: Punktladung
Feldliniendichte ∝ 1r2 , wenn Feldlini-
en „unendlich lang“ (da masseloses Aus-tauschteilchen, das Photon)
1.3.3 Der elektrische Fluss
Elektrischer Fluss durch Flächenelementd ~A:
dΦel = ~E · d ~A; (1.4)
elektrischer Fluss durch Gesamtfläche A:
Φel =
∫A
~E d ~A. (1.5)
8

Beispiel: Kugeloberfläche um Punktladung Q:
Φel =Q
4πε0
∫1
r2dA ~E||d ~A
=Q
4πε0
∫dΩ =
Q
ε0
; dΩ =dA
r2heißt Raumwinkelelement.
1.3.4 Gauß’scher Satz
(weitere Erläuterungen Tipler, S. 654 ff.)Für geschlossene Oberflächen gilt:
Φel =
∫A
~E · d ~A =
∫V
~∇ ~E dV ;
divE = ~∇ · ~E =∂Ex∂x
+∂Ey∂y
+∂Ez∂z
=
∂/∂x∂/∂y∂/∂z
· Ex
EyEz
.
(1.6)
Dies ist das „Gauß’sche Gesetz“ und die Integralform der 1. Maxwell’schen Glei-chung.Für jede Fläche um Ladung Q gilt:
Φel =Q
ε0
=1
ε0
∫V
ρ dV
⇒ ~∇ ~E =ρ
ε0
.(1.7)
Beispiel: Unendlich langer Stab mit homogener Ladungsdichte λ:
∫~E · d ~A = E · 2πr · L = Q
ε0= λ·L
ε0
⇒ E = λ2πε0r
.
9

Die deutlich kompliziertere Möglichkeit sieht folgendermaßen aus:
dE =1
4πε0
dQ
r2=
1
4πε0
λ dy
x2 + y2
Da die Beträge in y-Richtung sich aufgrund von Symetrie-überlegungen gegenseitig aufheben:
E = Ex =
∫ ∞−∞
dE(y) · cos θ
=λ
4πε0
∫ ∞−∞
1
x2 + y2· cos θ dy
y = x · tan θ dy =x
(cos θ)2dθ x2 + y2 =
x2
(cos θ)2
⇒ E =λ
4πε0
1
x
∫ π2
−π2
cos θdθ
=λ
4πε0
1
xsin θ|
π2−π2
⇒ E =λ
2πε0
1
x.
Beispiel: Kondensator mit homogener Ladungsdichte σ:
Abbildung 1.3:Plattenkondensator
E · A = Qε0
= σ·Aε0
⇒ E = σε0.
Experiment: Feldlinienbilder
10

Abbildung 1.4: verschiedene Feldlinienbilder
Es sind folgende Tendenzen zu erkennen:
• Feldlinien zwischen ungleichnamigen Ladungen „wollen“ sich verkürzen;• Feldlinien zwischen gleichnamigen Ladungen verdrängen sich;• Feldlinien stehen senkrecht auf metallischen Oberflächen.
1.3.5 Influenz
Bei der Influenz geht es um die Verschiebung von Ladungen, also Elektronen, ver-ursacht durch ein elektrisches Feld.
Experiment: Influenz
Abbildung 1.5:Elektrometer
Durchführung: Zwei metallische Platten werden, wäh-rend sie sich berühren, in einen Plattenkondensatorgehalten. Im Plattenkondensator werden die Plat-ten voneinander entfernt, sie berühren sich nicht mehr.
Beobachtung: Beim „Abstreifen“ der Platten an einemElektrometer zeigt sich, das auf der einen Platte diepositiven und auf der anderen Platte die negativenLadungen waren.
Erklärung: Während sich beide Platten im Kondensator berühren, bewegen sichdie negativen Ladungen(Elektronen) in Richtung positiver Pol des Kondensators,wodurch ein Elektronenmangel an der zur negativen Seite des Kondensatorszeigenden Platte auftritt. Wenn die Platten voneinander entfernt werden, bleibendiese Ladungsschwerpunkte erhalten. Dieses Phänomen nennt man Influenz.
1.3.6 Elementarladung
Die Elementarladung e ist die kleinste Ladung die ein Teilchen „tragen“ kann. Alleweiteren Ladungen sind Vielfache der Elementarladung. Sogenannte Quarks, die nur
11

Experiment: Influenzmaschine
Abbildung 1.6: Prinzip der Influ-enzmaschine
Abbildung 1.7: Influenzmaschine
±13e oder ±2
3e als Ladungen tragen sollen, treten nie alleine auf, so dass auch hier
noch nie ein anderer Ladungsbetrag als n · e beobachtet wurde.
e = 1, 602 · 10−19 C (Elementarladung)
Gemessen wird die Elementarladung mit demMillikan-Versuch. Dabei werden Öltröpf-chen in ein elektrisches Feld geblasen, welches senkrecht auf der Erdoberfläche steht.Das Experiment wird in zwei „Stufen“ durchgeführt. Zuerst wird das elektrische Feldso hochgeregelt, bis ein ausgewähltes Öltröpfchen in der Schwebe ist, d.h. Gravita-tionskraft und Auftrieb sind im Gleichgewicht mit Fq.Im zweiten Teil wird das elektrische Feld abgestellt, so dass das Tröpfchen fällt. Dahier die Stokes-Reibung wirkt, fällt das Tröpfchen mit einer konstanten Geschwindig-keit, sobald Stokes-Reibung und Gravitationskraft bzw. Auftrieb im Gleichgewichtsind.
Abbildung 1.8: Millikan-Versuch (1)
Ziel: Öltröpfchen schwebt:
Fq = FG − FAq ·Q = V · ρ · g − V · σ · g
=4
3πr3(ρ− σ) · g.
Problem: genaue Bestimmung des Radiusr, daher zweiter Teil des Versuchs.
12

Abbildung 1.9: Millikan-Versuch (2)
Zur Bestimmung von r wird das Tröpfchenfallen gelassen:
FR = FG − FA6πrνv =
4
3πr3(ρ− σ) · g.
Nach Messung der Geschwindigkeit v istalles bekannt um die Elementarladung zuberechnen.
1.4 Potential und Spannung
1.4.1 Arbeit im elektrischen Feld
Für das ~E-Feld gilt:
• Zentralkraftfeld;• konservativ, d.h.
∮~E · d~s = 0;
• rot ~E = 0;•∫ P2
P1
~E · d~s ist wegunabhängig.
Die Arbeit, die benötigt wird, um eine Ladung q vom Punkt P1 nach P2 zu bringen,berechnet sich folgendermaßen:
W =
∫ P2
P1
~F · d~s
= q ·∫ P2
P1
~E · d~s.(1.8)
Da die ~E-Felder in der Elektrostatik konservativ sind, ist die zu verrichtende Arbeitum eine Ladung q zu transportieren bloß von Start- und Zielkoordinaten abhängig,der Weg ist unerheblich. Ob ein ~E-Feld konservativ ist, lässt sich mit den gleichenMethoden testen, wie bereits bei den Kraftfeldern in Physik I.
Beispiel: Punktladung q von r1 nach r2:
W =
∫ P2
P1
q ·Q4πε0
1
r2dr
= −q ·Q4πε0
1
r
∣∣∣∣r2r1
=q ·Q4πε0
·(
1
r1
− 1
r2
).
13

Es werden zwei Fälle unterschieden für r2 > r1:
• q ·Q > 0 (Abstoßung): W > 0→ Energiegewinn;• q ·Q < 0 (Anziehung): W < 0→ Energieverlust.
Da das ~E-Feld konservativ ist, lässt sichdas Potential im Punkt P eindeutig defi-nieren als:
Φ(P ) =
∫ ∞P
~E · d~s
=1
q
∫ ∞P
~F · d~s;
Φ(∞) = 0.
(1.9)
Die zu verrichtende Arbeit um eine Probe-ladung q vom Punkt P ins Unendliche zutransportieren, berechnet sich: W (∞) =q · Φ(∞).
Abbildung 1.10: anziehendes Potential
Abbildung 1.11: abstoßendes Potential
Um nun die zu verrichtende Arbeit zu berechnen um q von P1 nach P2 zu transportie-ren, berechnet man die Potentialdifferenz multipliziert mit q. Die Potentialdifferenznennt man Elektrische Spannung U :
U = Φ(P1)− Φ(P2)
=
∫ P2
P1
~E · d~s;
[U ] = 1N m
A s= 1 V (Volt).
(1.10)
∆Epot = q · Φ(P2)− q · Φ(P1)
= q · U ;
∆Ekin = −∆Epot.
(1.11)
Die Energie Elektronenvolt (1 eV) gibt den Energiegewinn eines Elektrons beimDurchlaufen der Potentialdifferenz 1 Volt an.
1 eV = 1, 602 · 10−19 C · 1 V = 1, 602 · 10−19 J (1.12)
14

Beispiel: attraktives Potential mit Q · q < 0, q von r1 nach r2:
Potentielle Energie erhöht sich ∆Epot > 0;Arbeit muss geleistet werden W < 0;Spannung U < 0.
Beispiel: Beschleunigung von Elektronen
Abbildung 1.12: evakuierte Röhre
Durch die Heizung werden Elektronen ausder Kathode gelöst und im Folgenden imelektrischen Feld beschleunigt. Sie durch-laufen die Spannungsdifferenz U.
Ekin = Epot
me
2· v2 = e · U
⇒ v =
√2e
meU ;
z.B. U = 100 V
⇒ v = 5, 9 · 106 m
s≈ 0, 02 c0.
Die Geschwindigkeit ist offensichtlich unabhängig von der Entfernung Kathode/Anode.Bei diesen relativ niedrigen Spannungen treten noch keine relativistischen Effekteauf; bei höheren Spannungen, z.B. in Beschleunigern wie dem DELTA müssen rela-tivistische Effekte berücksichtigt werden!
Anwendungen:
Abbildung 1.13: Braun’sche Röhre
1. Wehneltzylinder→ Intensität (Helligkeit) des Elektronenstrahls wird reguliert (Bündelung)
15

2. Beschleunigungsanode→ Elektronen werden durch positive Polung angezogen
3. Vertikale (y-Richtung) Ablenkplatten→ Elektronenstrahl wird je nach Polung nach oben oder nach unten abgelenkt
4. Horizontale (x-Richtung) Ablenkplatten→ Elektronenstrahl wird je nach Polung nach rechts oder nach links abgelenkt
5. Schirm→ der Elektronenstrahl wird auf dem Schirm sichtbar
Abbildung 1.14: Röntgenröhre
Die beschleunigten Elektronen werdenbeim Eindringen in die Anode starkabgebremst. Dabei können drei Artenvon Strahlung entstehen: charakteristi-sche Röntgenstrahlung, Bremsstrahlungund sogenannte Linienfeldstrahlung.
Anwendung: Elektrostatische BeschleunigerDas Problem bei Elektrostatischen Be-schleunigern, hohe Spannungen zu erzeu-gen, wird zum einen durch raffinierteSchaltungen (Marx-Generator, Cockroft-Walton-Generator) und zum anderendurch mechanischen Ladungstransport(Van-de-Graaf-Generator) gelöst.
16

Bei dem Van-de-Graaf-Tandem wird dieSpannung gleich zweifach ausgenutzt. EinProblem hier ist die zu niedrige Durch-schlagsfeldstärke von Luft (∼ 3 · 106 V
m).
Daher wird es mit Schwefelhexafluorid(SF6) gefüllt (Durchschlagsfeldstärke: ∼9 · 109 V
m).
Die Durchschlagsfeldstärke bezeichnet dieelektrische Feldstärke, die höchstens ange-legt sein darf, ohne dass es zu einem Fun-ken kommt.
Abbildung 1.15: Van-de-graaf-Tandem
Beispiel: verschiedene Beschleunigungsspannungen
• Röntgenröhre: 50 keV• frühere Beschleuniger: ∼ 1 MeV• DELTA: 1, 5 GeV• LHC: 7 TeV• kosmische Strahlung: bis ∼ 1020 eV
1.4.2 Poisson- und Laplacegleichung
Aus der Definition des Potentials(∫∞
P~E · d~s
)folgt
~E = −grad Φ = −~∇Φ. (1.13)
Es gibt also zwei Möglichkeiten, ein elektrostatisches Feld zu beschreiben. Zumeinen mittels einer Potentialfunktion Φ(P ), die jedem Punkt P eine Zahl zuordnet;oder zum anderen mittels des Vektorfeldes ~E, welches jedem Punkt einen Vektor(Ex, Ey, Ez) zuordnet, der Größe und Richtung des Feldes beschreibt.Aus der 1. Maxwell-Gleichung folgt direkt:
div ~E =ρ
ε0
= − div grad Φ
= −∆Φ
⇒ ∆Φ = − ρ
ε0
. (1.14)
∆ ist der Laplace-Operator.In ladungsfreien Gebieten vereinfacht sich die Poisson-Gleichung zur Laplace-Gleichung:
ρ = 0
⇒ ∆Φ = 0.(1.15)
17

Anmerkung zur Laplace-Gleichung: Die Bedeutung der Laplace-Gleichung istvergleichbar zu F = M · a (Physik I). Mit ihrer Hilfe kann man bei gegebener La-dungsverteilung immer!! Potential und Feldstärke berechnen.
Allgemeine Laplace-Gleichung in drei Dimensionen:
∆Φ =
(∂2
∂ x2+
∂2
∂ y2+
∂2
∂ z2
)Φ(x , y , z) = 0;
numerisch in 2 Dimensionen (∆x = ∆y):
1∆x
(Φ+x−Φ0
∆x− Φ0−Φ−x
∆x
)+ 1
∆y
(Φ+y−Φ0
∆y− Φ0−Φ−y
∆y
)= 0
⇔ Φ+x − 2Φ0 + Φ−x + Φ+y − 2Φ0 + Φ−y = 0
⇔ Φ0 = 14
(Φ+x + Φ−x + Φ+y + Φ−y)
⇒ Φ0 ist das arithmetische Mittel der umliegenden Poten-tiale!
1.5 Theoretische Ergänzungen zu elektrischem Feld und Po-tential
Zunächst ein kurzer Vorspann zur Beziehung zwischen Mathematik und der Theo-rie in der Physik. Die Mathematik ist wie eine Sprache mit „Grammatik“, die dasAufschreiben von einfachen kompakten Gesetzen ermöglicht. Die Theorie macht vonihr Gebrauch, indem sie Beobachtungen in mathematische Strukturen zusammen-fasst. So ist beispielsweise F ∝ 1
r2 deutlich kompakter als eine Wertetabelle. DerFormalismus soll dabei alle Beobachtungen wiedergeben.
1.5.1 Coulomb’sches Gesetz
Das Coulomb’sche Gesetz gibt die Kraft zwischen zwei ruhenden (raumfesten)Punktladungen q1, q2 im Vakuum an, wobei wir die auf q1 wirkende Kraft notieren
~FC,12 =1
4πε0
q1q2
|~r1 − ~r2|2~r1 − ~r2
|~r1 − ~r2|. (1.16)
Die Coulombkraft (1.16) ist
(a) eine Paarkraft, die zwischen jedem Paar Ladungen wirkt,(b) proportional zum Betrag beider Ladungen,(c) bei gleichnamigen Ladungen abstoßend (q1q2 > 0),
18

(d) erfüllt das Reaktionsprinzip ~FC,12 = −~FC,21 (actio=reactio, siehe NewtonscheAxiome),
(e) entlang der Verbindungslinie ~r1− ~r2 gerichtet, d.h. sie ist eine Zentralkraft ,(f) proportional zum Betrag 1
|~r1−~r2|2 , (experimentell sehr genau geprüft, siehe z.B.Jackson Kap. I.2)
(g) erfüllt das Superpositionsgesetz (siehe Newtonsche Axiome), das heißt, dieKraft einer weiteren Ladung q3 auf q1 würde eine Gesamtkraft ~FC,1 = ~FC,12 +~FC,13 auf die Ladung q1 ergeben (siehe unten).
Wichtig für die Maxwellgleichungen werden die Zentralkrafteigenschaft (e), die Pro-portionalität zu 1
|~r1−~r2|2 (f) und das Superpositionsgesetz (g) sein.
Die Coulombkraft 1.16 ähnelt derGravitationskraft einer Massem2 auf eine Massem1 aus Physik 1
~FG,12 = −G m1m2
|~r1 − ~r2|2~r1 − ~r2
|~r1 − ~r2|.
Zwei Hauptunterschiede sind festzuhalten:
1. Die Gravitationskraft ~FG ist immer anziehend.2. Im Allgemeinen ist die Gravitation FG deutlich schwächer.
Trotzdem scheint ~FG den Alltag zu dominieren. Zum zweiten Punkt ein
Beispiel: Es seien q1 = q2 = |e| = 1,6 · 10−19 C die Elementarladung. Wir fragenuns, wie schwer die Massen sein müssen, damit die Gravitationskraft größer als dieCoulombkraft wird. Es gilt FG ≥ FC genau dann, wenn
m1m2 >e2
4πε0G' (1,85 · 10−9 kg)2 ' (1018 u)2
Mit 1 u := Masse H-Atoms = 1,66 · 10−27 kg folgt, dass die Massen zumindest soschwer wie circa 1018 H-Atome sein müssen.
Aufgrund der Antiproportionalität zum Quadrat des Abstandes ähnelt die BewegungCoulombkraftfeld der im Gravitationskraftfeld. Dies haben wir bereits in der Physik1 gesehen. Die Planetenbahnen unter Einfluss der (anziehenden) Gravitationskraftund die Bahnen von geladenen Teilchen bei der Rutherfordstreuung unter Einflussder (abstoßenden) Coulombkraft konnten auf die gleiche Weise hergeleitet werden.Allerdings ist Vorsicht geboten. Folgende zwei Punkte müssen beachtet werden:
1. Wie wir gesehen haben, ist die Coulombkraft besonders wichtig für mikrosko-pische Systeme, z.B. das H-Atom. Dann gilt aber die Quanten-Mechanik. Dasheißt insbesondere, dass in Folge der Unschärferelation keine Teilchenbahnenmehr definiert sind (mehr dazu in Physik 4).
2. Beschleunigte Ladungen „strahlen“ Energie ab, daher gilt die Elektrostatiknicht mehr ( mehr dazu später in dieser Vorlesung)
19

Die obigen Eigenschaften (a)-(d) werden allgemein von jedem Coulombgesetz
~FC,12 = kq1q2
|~r1 − ~r2|2~r1 − ~r2
|~r1 − ~r2|(1.17)
mit einer frei wählbaren Konstanten k erfüllt.
Im SI-System ist k = 14πε0
.Dies ist das gesetzlich vorgeschriebene Einheitensystem, das wir daher in dieserVorlesung verwenden werden.
1.5.2 Elektrisches Feld
Das elektrische Feld der Punktladung q2 im Vakuum am Ort ~r1 ist definiert durch
~E(~r1) :=~FC,12
q1
=q2
4πε0
~r1 − ~r2
|~r1 − ~r2|3. (1.18)
Allgemein definieren wir das elektrische Feld auf Grund beliebig vieler Ladungenam Ort ~r durch die Gesamt-Coulombkraft auf eine kleine Probeladung q am Ort~r, das heißt
~E(~r) := limq→0
~F (~r)
q.
Dabei ist der Grenzprozess q → 0 im Allgemeinen wichtig, da eine Probeladungselbst das Feld ändert (z.B. durch Influenz an Metalloberflächen).
Das elektrische Feld ~E(~r) ist ein Vektorfeld, d.h. eine Abbildung
R3 → R3
~r 7→ ~E(~r),
die jedem Punkt ~r einen Vektor ~E(~r) zuordnet.
Wenn umgekehrt das elektrische Feld ~E(~r) gegeben ist, kann die Kraft auf eineLadung q sofort angegeben werden mit
~F (~r) = q ~E(~r). (1.19)
Superpositionsprinzip:
Für N raumfeste Punktladungen qi am Ort ~ri mit i ∈ 1, · · · , N addieren sichdie elektrischen Felder zu
~E(~r) =N∑i=1
1
4πε0
qi~r − ~ri|~r − ~ri|3
. (1.20)
20

Das lineare Superpositionsgesetz ist hier erstmal eine experimentelle Tatsache, diemit dem Newtonschen Superpositionsprinzip für Kräfte im Einklang steht. DieseAnnahme ist äquivalent zur Linearität der Maxwellgleichungen bezüglich des elek-trischen Feldes. Diese Linearität muss in der Quanten-Elektrodynamik (QED) kor-rigiert werden (siehe Masterstudium).Obiges Superpositionsgesetz ist für N diskrete Punktladungen qi formuliert. Häufigsind viele diskrete Ladungen nah beieinander. Es bietet sich deswegen an, zu einerkontinuierlichen (Raum-)Ladungsdichte ρ(~r) überzugehen.
~r
~0
dV
Abbildung 1.16: Volumenelement dV = dr 3 mit der Ladung dq = ρ(~r)dV
Ein Volumenelement dV = dr 3 am Ort ~r enthält dann eine Ladung dq = ρ(~r)dV(siehe Abbildung 1.16). Die Gesamtladung Q in einem gegebenem Volumen V lässtsich über ein Volumenintegral über V berechnen, denn
Q =
∫V
dV ρ(~r).
Analog kann für eine mit Ladung belegte Fläche eine Flächenladungsdichte σ(~r)eingeführt werden, so dass die Gesamtladung auf einer Fläche A durch das Flächen-integral
Q =
∫A
|d~f |σ(~r)
gegeben ist.Für eine mit Ladung belegte Linie kann eine Linienladungsdichte λ(~r) eingeführtwerden, so dass die Gesamtladung angegeben wird mit
Q =
∫L
|d~l|λ(~r).
Für eine raumfeste Ladungsdichte ρ(~r) ergibt sich das elektrische Feld auf Grunddes Superpositionsgesetzes, siehe Abbildung 1.17, mit
~E(~r) =1
4πε0
∫dr′ 3ρ(~r ′)︸ ︷︷ ︸
dq
~r − ~r ′
|~r − ~r ′|3. (1.21)
21

~r
~0
dV~r − ~r ′
~r ′
Abbildung 1.17: Ortsvektor ~r und ~r ′ in (1.21)
Beispiele:
1. In Kapitel 1.3.4 wurde das elektrische Feld um einen unendlich langen Stabmit homogener Ladungsdichte λ durch Linienintegration berechnet. Dabei ist~E(~r) = ~er
λ4πε0
1rin Zylinderkoordinaten (r, ϕ, z), wobei der Stab parallel zu
~ez durch den Ursprung verläuft. Das elektrische Feld zeigt radial nach außen,senkrecht zum Stab, siehe Abbildung 1.18 .
λ
~E
Abbildung 1.18: Elektrisches Feld eines unendlichen langen Stabes mit Linienla-dungsdichte λ
2. Wir berechnen das elektrische Feld einer unendlichen Ebene mit homogenerFlächenladungsdichte σ. Dazu wählen wir das Koordinatensystem so, dass diegeladene Ebene die xy-Ebene ist. Die Ladungsverteilung ist
(a) symmetrisch bezüglich Translation in der xy-Ebene und(b) bezüglich Rotation um die z-Achse.
Daher darf sich das elektrische Feld unter diesen Symmetrieoperationen nichtändern. Die Rotationssymmetrie bedingt, dass die Feldrichtung parallel zu ~ezist. Die Translationssymmetrie bedingt, dass der Betrag des Feldes nur von zabhängt. Deshalb ist ~E(~r) = E(z)~ez. Nun berechnen wir E(z) mit Hilfe von
22

(1.21) in Zylinderkoordinaten
E(z) =σ
4πε0
∫ ∞0
dr′r′∫ 2π
0
dφ′z
(z2 + r′2)32
=u=r′2
σ
4ε0
∫ ∞0
duz
(z2 + u)32
= − σ
2ε0
z
(z2 + u)12
∣∣∣∣∣∞
0
=σ
2ε0
z
|z|.
Also ist~E(~r) = sgn z · σ
2ε0
~ez.
Das Feld ist folglich homogen jeweils über und unter der Platte (siehe Abbil-dung 1.19).
σ
~E
Abbildung 1.19: Elektrische Feld einer homogen positiv geladenen Platte mit Flä-chenladungsdichte σ
In den Beispielen 1 und 2 verläuft die Rechnung jeweils so, dass zuerst mittels einesSymmetriearguments die Richtung des elektrische Feldes bestimmt und gefolgertwird, von welchen Koordinaten der Betrag des elektrischen Feldes abhängt. Dannwird dieser Betrag durch Integration von (1.21) berechnet.
1.5.3 Dirac’sche Delta-Distribution
Für das elektrische Feld wird die Schreibweise (1.21) mit einer Ladungsdichte ρ(~r)bevorzugt. Es stellt sich die Frage, wie eine Ladungsdichte ρ(~r) für diskrete La-dungen angeben werden kann. Dies gelingt mit Hilfe der Dirac’schen δ-Distribution(Paul Dirac, 1902-1984, Nobelpreis 1933).
In einer Dimension ist die Delta-Distribution δ(x) definiert durch folgende Eigen-schaft mit einer glatten Funktion f : R 7→ R∫ ∞
−∞f(x)δ(x)dx = f(0) ∀a > 0. (1.22)
23

0x
y
Abbildung 1.20: Delta-Distribution als „Peak“ bei x = 0 mit Fläche 1 unter demPeak
Anschaulich bedeutet das, dass die Delta-Distribution δ(x) einen unendlich schmaleund unendlich hohen Peak bei x = 0 darstellt, wie in Abbildung 1.20 angedeutet,wobei die Fläche unter dem Peak genau 1 beträgt.
Die Delta-Distribution ist keine Funktion im eigentlichen Sinne, sondern eine Abbil-dung aus dem Raum der reelwertigen glatten Funktionen, die jeder Funktion f ihrenWert f(0) bei x = 0 zuordnet. Man kann sagen, eine Distribution ist eine „Funk-tion“, die nur unter einem Integral definiert ist. Alle Eigenschaften unten geltenentsprechend nur unter einem Integral.
Es ist möglich, die Delta-Distribution durch einen Grenzprozess von Funktionendarzustellen. Dazu einige Beispiele für solche Darstellungen:
1. Beispiel (siehe Abbildung 1.21):
δ(x) = lima→0+
1
a−a
2≤ x ≤ a
2
0 sonst
0
x
y
Abbildung 1.21: Darstellung der Delta-Distribution durch immer schmalere undhöhere „Rechteckfunktionen“ mit gleicher Fläche 1
24

2. Beispiel (siehe Abbildung 1.22, Übung):
δ(x) = limσ→0+
1√2πσ
e−x2
2σ2
0x
y
Abbildung 1.22: Darstellung der Delta-Distribution durch immer schmalere undhöhere Gaußglocken mit gleicher Fläche 1.
Im Folgenden geben wir einige wichtige Eigenschaften der Delta-Distribution an,die nur „unter einem Integral“ gelten:
1. δ(x) = δ(−x), (Symmetrieeigenschaft)2. f(x)δ(x− a) = f(a)δ(x− a),
3. δ(ax) =1
|a|δ(x),
4. allgemeiner gilt δ(f(x)) =∑
NST xi
1
|f ′(xi)|δ(x− xi),
wobei über alle Nullstellen xi (NST) von f summiert wird,5. ∫
I
δ(a− x)δ(x− b)dx =
δ(a− b), falls a, b ∈ I0, sonst.
.
Exemplarisch beweisen wir die Eigenschaft 4.
Beweis. Wir betrachten zuerst ein Intervall [a, b], auf dem f(x) streng monoton ist.Daher existiert genau eine (oder keine) Nullstelle x1. In diesem Intervall ist f(x)invertierbar, das heißt es existiert eine Umkehrabbildung f−1 im Intervall [a, b].
25

Daraus folgt f−1(0) = x1 und∫ b
a
dx g(x)δ(f(x)) =u=f(x)
∫ f−1(b)
f−1(a)
du1
f ′(f−1(u))g(f−1(u))δ(u)
=1
f ′(f−1(0))g(f−1(0))
=1
f ′(x1)g(x1))
=
∫ b
a
dx1
f ′(x1)g(x)δ(x− x1).
Der Betrag |f ′(x1)| erscheint daher, dass wir für f(b) < f(a) die Integrationsgrenzenaustauschen.
Die allgemeine Formel 4 folgt durch Summation über alle Intervalle mit Nullstellen.
In drei Raumdimensionen können wir die Delta-Distribution über ein Produkt überdie kartesischen Koordinaten mit
δ(~r) := δ(x)δ(y)δ(z)
mit∫dr3f(~r)δ(~r) = f(~0)
(1.23)
angeben.
Mit Hilfe der Delta-Distribution lässt sich die Ladungsdichte einer diskreten Punkt-ladung q bei ~r = ~r0 kontinuierlich schreiben als
ρ(~r) = qδ(~r − ~r0).
Für das elektrisches Feld erhalten wir nach 1.21
~E(~r) =1
4πε0
∫dr′ 3qδ(~r ′ − ~r0)
~r − ~r ′
|~r − ~r ′|3
=1
4πε0q~r − ~r0
|~r − ~r0|3,
was sich korrekt auf die ursprüngliche Definition (1.18) reduziert. Die Ladungsdichtefür N diskrete Punktladungen qi bei ~ri lautet dann wie gehabt
ρ(~r) =N∑i=1
qiδ(~r − ~ri). (1.24)
Dies führt wieder auf ein superponiertes elektrisches Feld (1.20) mit analoger Rech-nung und rechtfertigt die Darstellung diskreter Ladungsverteilungen mit Hilfe derDelta-Distribution.
26
1.5.4 Elektrostatisches Potential
Bevor wir das elektrostatische Potential einführen, erinnern wir nochmal an denBegriff des konservativen Vektorfeldes aus der Physik 1. Zunächst hatten wirdort definiert:
Ein Vektorfeld ~E(~r ) ist konservativ
:⇔~r2∫~r1
~E(~r ) · d~r ist unabhängig vom Weg von ~r1 nach ~r2.
~r1
~r2
Abbildung 1.23: Zwei verschiedene Wege von ~r1 nach ~r2
Dann hatten wir noch folgende weitere Kriterien hergeleitet für Konservativität.
(a) Ein Vektorfeld ~E(~r ) ist konservativ⇔ Es gibt ein skalares PotentialΦ(~r ) mit
~E(~r ) = −~∇Φ(~r ) (1.25)
⇔∮Γ
~E(~r ) · d~r = 0 ∀ geschlossenen Wege Γ.
(b) In jedem einfach zusammenhängendem Gebiet gilt außerdem das wich-tige differentielle Kriterium.
Ein Vektorfeld ~E(~r ) ist konservativ ⇔ ~E(~r ) ist wirbelfrei, das heißt
rot ~E = ~∇× ~E = ~0. (1.26)
Das letzte differentielle Kriterium folgt über den Satz von Stokes∮∂A
~E(~r ) · d~r =
∫A
d~f ·(~∇× ~E
), (1.27)
wobei A eine beliebige gekrümmte orientierbare Fläche und ∂A der Rand dieserFläche ist.
Insbesondere hatten wir auch gezeigt, dass alle Zentralfelder
~E(~r ) = f(r)~r
r
mit beliebiger Funktion f(r) konservativ sind und ein Potential der Form
Φ(r) = −∫dr f(r) (1.28)
27

besitzen, das durch die negative Stammfunktion der Funktion f(r) gegeben ist.
Wir wollen nun zeigen, dass das elektrische Feld (1.4.5)
~E(~r ) =1
4πε0
∫dr′ 3ρ(~r ′)
~r − ~r ′
|~r − ~r ′|3,
aus dem letzten Kapitel~∇× ~E = ~0 (1.29)
erfüllt.
Dies ist die 2. Maxwellgleichung der Elektrostatik. In Worten besagt sie, dasselektrische Felder wirbelfrei sind.
Damit ist das elektrische Feld also konservativ und es existiert ein elektrostati-sches Potential
Φ(~r ) =1
4πε0
∫d~r ′3ρ(~r ′)
1
|~r − ~r ′| (1.30)
mit−~∇Φ = ~E(~r ). (1.31)
Beweis. Nachrechnen von (1.29):
~∇× ~E =1
4πε0
∫d~r ′3ρ(~r ′)~∇× ~r − ~r ′
|~r − ~r ′|3
~∇× ~r
r3=
~∇× ~rr3
+ ~∇ 1
r3× ~r
= ~0− 3
r4
~r
r× ~r = ~0
⇒ ~∇× ~r − ~r ′
|~r − ~r ′|3= ~0
⇒ ~∇× ~E = ~0.
Beweis. Zu (1.30): Das elektrische Feld einer Punktladung q bei ~r = 0
~E(~r ) =q
4πε0
~r
r3
ist ein Zentralfeld und (analog zur Gravitationskraft) können wir mit Hilfe von(1.28) ein Potential konstruieren. Damit ergibt sich für das Potential einer Punkt-ladung q bei ~r = 0
Φ(r) = − q
4πε0
∫dr
1
r2=
q
4πε0
1
r+ const. (1.32)
28

Dabei ist const eine beliebige Konstante, das Potential Φ ist also nicht eindeutig.Man wählt normalerweise const = 0, so dass lim
r→∞Φ(r) = 0.
Für eine Punktladung q bei ~r = ~r ′ verschieben wir das Potential (1.32), also
Φ(~r) =q
4πε0
1
|~r − ~r ′|.
Für eine ganze Ladungsverteilung ρ(~r) beachten wir, dass ~∇ eine lineare Operationist, also
−~∇(Φ1 + Φ2) = −~∇Φ1 − ~∇Φ2 = ~E1 + ~E2.
Daraus folgt, dass sich Potentiale addieren, wenn sich die elektrischen Felder addie-ren. Also gilt das Superpositionsgesetz auch für Potentiale und wir erhalten füreine ganze Ladungsverteilung ρ(~r ) das Potential
~E(~r ) =1
4πε0
∫dr′ 3 ρ(~r ′)
~r − ~r ′
|~r − ~r ′|3
hat Potential Φ(~r ) =1
4πε0
∫dr′ 3 ρ(~r ′)
1
|~r − ~r ′|
(1.33)
mit lim|~r |→∞
Φ(~r ) = 0, also ist (1.30) gezeigt.
Bemerkung: Aus der Existenz eines Potentials mit −~∇Φ = ~E folgt auch wieder
~∇× ~E = −~∇× ~∇Φ = 0,
also die Maxwellgleichung.
Folgerungen aus (1.29) und (1.30):
(a) Arbeit, um eine Ladung q im festen E-Feld von ~r1 nach ~r2 zu bringen:~r2∫~r1
~FC(~r ) · d~r = q
~r2∫~r1
~E(~r ) · d~r = q(Φ(~r1)− Φ(~r2)) = qU.
Also ist qΦ(~r ) = Epot(~r ) = die potentielle Energie (Lageenergie) der Ladungq im Sinne der Mechanik (Physik I).
(b) Die Integrale Form der 2. Maxwellgleichung:∮~E(~r ) · d~r = 0 (1.34)
hängt mit der Maxwellgleichung (1.29) über den Satz von Stokes zusammen∮∂A
~E(~r ) · d~r =
∫A
d~f ·(~∇× ~E
)= 0
für beliebige orientierbare Flächen A.
29

1.6 Vektoranalysis, Integralsätze
1.6.1 Gradient, Rotation, Divergenz
Zunächst beginnen wir mit einer kurzen Wiederholung von Gradient, Divergenz,Rotation aus Physik 1.
Sei
Φ(~r ) Skalarfeld R3 → R;
~E(~r ) Vektorfeld R3 → R3.
Der Nabla-Operator ist definiert als
~∇ :=
∂
∂x
∂
∂y
∂
∂z
. (1.35)
Er ist ein Vektor-Ableitungsoperator.
Gradient
Der Gradient wird angewendet auf ein Skalarfeld und ergibt ein Vektorfeld.
grad Φ := ~∇Φ =
∂xΦ∂yΦ∂zΦ
Der Gradient zeigt immer in Richtung des stärksten Anstiegs von Φ und steht senk-recht auf Äquipotentiallinien, siehe Abbildung 1.24.
Die Richtungsableitung in Richtung von ~v im Punkt ~r0 kann auf einfache Weise ausdem Gradienten bei ~r0 erhalten werden. Dazu betrachten wir einen Weg ~r(t) = ~r0+~vtund differenzieren Φ(~r(t)) nach t
d
dt
∣∣∣∣t
Φ(~r(t)) = ~∇Φ(~r0) · ~v. (1.36)
Man sieht, dass für ~v entlang einer Äquipotentiallinie ~∇Φ(~r0) · ~v = 0 gelten muss,also der Gradient senkrecht zur Äquipotentiallinie zeigt.
30

Abbildung 1.24: Äquipotentiallinien (in drei Dimensionen Äquipotentialflächen) mitdazu senkrechten Gradienten (Pfeile)
Der Gradient ist auch wichtig bei der dreidimensionalen Taylorentwicklung
Φ(~r0 + d~r ) = Φ(~r0) + ~∇Φ(~r0) · d~r +O(dr2). (1.37)
Rotation
Die Rotation wird angewendet auf ein Vektorfeld und ergibt auch wieder ein Vek-torfeld.
rot ~E := ~∇× ~E =
∂yEz − ∂zEy∂zEx − ∂xEz∂xEy − ∂yEx
Die Rotation hat die anschauliche Bedeutung einer Wirbelstärke des Vektorfeldes.Dies wird weiter unten erläutert im Anschluss an den Satz von Stokes.
Divergenz
Die Divergenz wird angewendet auf ein Vektorfeld und ergibt ein Skalarfeld.
div ~E := ~∇ · ~E = ∂xEx + ∂yEy + ∂zEz
Die Divergenz hat die anschauliche Bedeutung einer Quellstärke des Vektorfeldes.Dies wird weiter unten erläutert im Anschluss an den Satz von Gauß.
Die Vektoranalysis für krummlinige Koordinatensysteme werden wir etwas späterbesprechen.
31

1.6.2 Satz von Gauß
Der (mathematische) Satz von Gauß liefert eine Beziehung zwischen dem Fluss FEeines Vektorfeldes ~E durch eine geschlossene Fläche ∂V , die den Rand eines orien-tierbaren Volumens V darstellt, und dem Volumenintegral der Divergenz des Feldes~E über dieses Volumen
FE :=
∮∂V
d~f · ~E(~r ) =
∫V
dV(~∇ · ~E
). (1.38)
∂V
V
Abbildung 1.25: Allgemeines Volumen V und dessen Oberfläche ∂V im Satz vonGauß
A
~E
d ~A
Abbildung 1.26: Fläche A mit elektrischem Feld ~A und einem infinitesimalen Flä-chenelement d ~A
Die erste Gleichheit ist die Definition des Flusses FE eines Vektorfeldes ~E durch diegeschlossene Fläche ∂V als Flächenintegral des Vektorfeldes ~E über diese Fläche,die zweite Gleichheit der eigentliche Gauß’sche Satz. Wichtig ist, dass dieser Satzfür beliebige orientierbare Volumina V gilt.
Dem Fluss eines Vektorfeldes kann eine anschauliche Bedeutung gegeben werden,wenn wir den Fall betrachten, dass ~E(~r ) = ~v(~r ) das Geschwindigkeitsfeld einerinkompressiblen Flüssigkeit ist. Dann ist d~f · ~v das Flüssigkeitsvolumen, das proZeit durch df aus dem Volumen fließt. Damit wird FV =
∮∂Vd~f · ~v der Gesamtfluss
von Flüssigkeitsvolumen aus der geschlossenen Fläche ∂V . Es gilt daher:
FV > 0 : V ist eine Quelle, Nettoausfluss;FV < 0 : V ist eine Senke, Nettoeinfluss.
32

Wir wollen nun den obigen Satz (1.38) von Gauß beweisen. Dazu wiederholen wirvorher aus Physik 1, wie die Integrale auf der linken Seite (Flächenintegral) undauf der rechten Seite (Volumenintegral) definiert sind und berechnet werden fürgekrümmte Oberflächen bzw. in krummlinigen Koordinaten.
(a) Wie integriert man über gekrümmte Flächen A = ∂V in (1.38), wieberechnet man (d~f) ?Dazu nutzen wir eine Parametrisierung der Fläche A mit zwei Koordinatenu1, u2
G → A;
(u1, u2) 7→ ~r(u1, u2).
Beispiel: Kugeloberfläche in Kugelkoordinaten u1 = θ, u2 = φ, R=Radius:
~r(θ, φ) = R
sin θ cosφsin θ sinφ
cos θ
= R~er;
∂~r
∂u1
= Tangente an A in Richtung u1,∂~r
∂u2
= Tangente an A in Richtung u2.
Damit definiert man das gerichtete Flächenelement
d~f =
(∂~r
∂u1
× ∂~r
∂u2
)du1du2. (1.39)
Es zeigt immer senkrecht zur Fläche A und∣∣∣d~f ∣∣∣ ist die Fläche des von ∂~r
∂u1du1
und ∂~r∂u2du2 aufgespannten Parallelogramms. Damit berechnet man den Fluss
in (1.38) wie folgt∫A
d~f · ~E =
∫∫G
du1du2
(∂~r
∂u1
× ∂~r
∂u2
)︸ ︷︷ ︸
= d~f
· ~E(~r(u1, u2)).(1.40)
Man kann zeigen, dass das Ergebnis dann tatsächlich nicht von der Wahl derParametrisierung abhängt!
Beispiele:
1) Kugeloberfläche: u1 = θ, u2 = φ in Kugelkoordinaten:
∂~r
∂θ= R
cos θ cosφcos θ sinφ− sin θ
= R~eθ;
∂~r
∂φ= R sin θ
− sinφcosφ
0
= R sin θ ~eφ;
⇒ d~f = dθdφ(R2 sin θ
)(~eθ × ~eφ) = dθdφ
(R2 sin θ
)~er.
33

Das Ergebnis ist genau das, das wir auch direkt hinschreiben würden.
2) Zylinderoberfläche: u1 = φ, u2 = z, R =Radius in Zylinderkoordinaten
~r(φ, z) =
R cosφR sinφz
;
∂~r
∂φ= R
− sinφcosφ
0
= R~eφ;
∂~r
∂z= ~ez;
d~f = dφdz R (~eφ × ~ez) = dφdz R~er
mit ~er =
cosφsinφ
0
. Auch hier erhalten wir das erwartete Ergebnis.
(b) Wie integriert man über Volumina V in krummlinigen Koordinaten?Wie berechnet man dV ?Wir nutzen eine Parametrisierung des Volumens V mit 3 Koordinaten
G → V ;
(u1, u2, u3) 7→ ~r(u1, u2, u3).
Volumenelement
dV =
∣∣∣∣( ∂~r
∂u1
× ∂~r
∂u2
)· ∂~r∂u3
∣∣∣∣ du1du2du3
=
∣∣∣∣∣∣∣∣det
(∂~r
∂u1
,∂~r
∂u2
,∂~r
∂u3
)︸ ︷︷ ︸
J
∣∣∣∣∣∣∣∣ du1du2du3
Der erste Ausdruck ist ein Spatprodukt und bestimmt das Volumen eines aus 3Vektoren aufgespannten Parallelepipeds. Der zweite Ausdruck berechnet das-selbe mittels einer Determinante. Diese heißt Jacobi-Determinante, wenn sieaus Ableitungen resultiert.
Beispiel:
Kugel ~r(r, θ, φ) = r
sin θ cosφsin θ sinφ
cos θ
|det J| =
∣∣∣∣∣∣∣∣∣∣(∂~r
∂θ× ∂~r
∂φ
)︸ ︷︷ ︸r2 sin θ ~er
· ∂~r∂r︸︷︷︸~er
∣∣∣∣∣∣∣∣∣∣= r2 sin θ
34

⇒ dV = r2 sin θ drdθdφ
(c) zurück zum Satz (1.38) von Gauß
Beweis. (Skizze) Zunächst gilt für den Fluss aus einem kleinen Quader Q mitMittelpunkt ~r = (x, y, z), siehe Abbildung 1.27,
~r
∆z
∆x
∆y
Abbildung 1.27: Kleiner Quader Q am Ort ~r mit der Ausdehnung ∆x∆y∆z
FE(∂Q) =
∮∂Q
d~f · ~E =
(Ex
(x+
1
2∆x, y, z
)− Ex
(x− 1
2∆x, y, z
))∆y∆z
+
(Ey
(x, y +
1
2∆y, z
)− Ey
(x, y − 1
2∆y, z
))∆x∆z
+
(Ez
(x, y, z +
1
2∆z
)− Ez
(x, y, z − 1
2∆z
))∆x∆y
+O(∆4)
= ∂xEx∆x∆y∆z + ∂yEy∆x∆y∆z + ∂zEz∆x∆y∆z +O(∆4)
= ∆x∆y∆z(~∇ · ~E
)(~r ) +O
(∆4)
=
∫Q
dV(~∇ · ~E
)+O
(∆4),
(1.41)
wobei wir im 2. Schritt eine Taylorentwicklung nutzen.Im Limes ∆→ 0 haben wir somit den Satz von Gauß gezeigt.
1 2
Abbildung 1.28: Zwei zusammengesetzte Quader
Nun betrachten wir ein größeres Volumen durch Zusammensetzen von zweiQuadern
FE(∂(Q1 +Q2)) = FE(∂Q1) + FE(∂Q2). (1.42)
35

Diese Beziehung gilt, weil sich die zwei Beiträge von der gemeinsamen Sei-tenfläche auf der rechten Seite in 1.42, siehe Abbildung 1.28, wegkürzen, dadie entsprechenden Normalenvektoren dieser Seitenflächen in entgegengesetzteRichtungen zeigen.
· · ·V
Abbildung 1.29: Approximation eines beliebigen Volumens V durch viele Quader
Ein beliebig geformtes Volumen kann man nun durch viele kleine Quaderapproximieren, wie in Abbildung 1.29 illustriert. Darauf wenden wir die Er-gebnisse (1.41) für einzelne Quader und die Zusammensetzungsregel (1.42) an
FE(∂V ) =(1.42)
∑i
FE(∂Qi)
=(1.41)
∑i
∫Qi
dV(~∇ · ~E
)=
∫V
dV(~∇ · ~E
).
Damit ist der Satz von Gauß (1.38) für beliebige Volumina V gezeigt.
Um die Bedeutung der Divergenz als Quellstärke zu verstehen, betrachtenwir nun wieder ein kleines Volumen V um ~r. Nach dem Satz von Gauß gilt∮
∂V
d~f · ~E =
∫V
dV(~∇ · ~E
)≈ |V |
(~∇ · ~E
)(~r ),
wobei |V | das Volumen von V bezeichnet. Damit folgt
(~∇ · ~E
)(~r ) = lim
|V |→0
1
|V |
∮∂V
d~f · ~E. (1.43)
Diese Beziehung zeigt, dass die Divergenz den lokalen Fluss pro Volumen bei~r misst. Das ist gerade die Quellstärke.
36

1.6.3 Satz von Stokes
(Wiederholung aus der Physik 1, in der Vorlesung ausgelassen)
Der Satz von Stokes gibt eine Beziehung zwischen der „Zirkulation“ ΓE eines Vek-torfeldes ~E entlang eines geschlossenes Weges ∂A, der den Rand einer Fläche Adarstellt, und dem Flächenintegral (Fluss) der Rotation über diese Fläche an, sieheAbbildung 1.30 . Dann ist
ΓE :=
∮∂A
~E · d~r =
∫A
d~f ·(~∇× ~E
). (1.44)
∂A
A
Abbildung 1.30: Fläche A mit Rand ∂A
Die erste Gleichheit ist die Definition der „Zirku-lation“ ΓE eines Feldes ~E entlang der geschlosse-nen Kurve ∂A als Wegintegral diese Vektorfeldes~E entlang der dieses Weges, die zweite Gleichheitist der eigentliche Satz von Stokes. Wichtig ist,dass dieser Satz für beliebige – auch gekrümmte– Flächen A gilt.
ΓE > 0 : Wirbel in Wegrichtung;ΓE < 0 : Wirbel gegen Wegrichtung.
Beweis. (Skizze)
Zunächst gilt für ein kleines ebenes Rechteck par-allel zur xy-Ebene mit Mittelpunkt ~r = (x, y, z)
37

∮∂
~E · d~r = ~E
(x+
1
2∆x, y, z
)· ~ey∆y − ~E
(x, y +
1
2∆y, z
)· ~ex∆x
− ~E
(x− 1
2∆x, y, z
)· ~ey∆y + ~E
(x, y − 1
2∆y, z
)· ~ex∆x
Taylor≈ ∂xEy∆x∆y − ∂yEx∆x∆y
=∆x∆y~ez ·(~∇× ~E
)=
∫d~f ·
(~∇× ~E
),
(1.45)
damit ist der Satz von Stokes für ein kleines ebenes Rechteck gezeigt.
Nun betrachten wir eine größere ebene Fläche G durch Zusammensetzen von zweiRechtecken:
ΓE(∂(1 +2)) = ΓE(∂1) + ΓE(∂2). (1.46)
Diese Beziehung gilt, weil sich die 2 Beiträge von der gemeinsamen Seite auf derrechten Seite zu Null addieren, da die entsprechenden Linienelemente dieser Seitenin entgegengesetzte Richtungen zeigen.
Abbildung 1.31: Approximation einer beliebigen ebenen Fläche G durch viele Recht-ecke G =
∑ii
Eine beliebig geformte ebene Fläche kann man nun durch viele kleine Rechteckeapproximieren, wie in Abbildung 1.31 illustriert. Darauf wenden wir die Ergebnisse(1.45) für einzelne Rechtecke und die Zusammensetzungsregel (1.46) an:
ΓE(∂G) =(1.46)
∑i
ΓE(∂i)
=(1.45)
∑i
∫i
d~f ·(~∇× ~E
)=
∫G
d~f ·(~∇× ~E
).
Damit ist der Satz von Stokes (1.44) für beliebige ebene Flächen gezeigt.
Für gekrümmte Fläche A parametrisiert als
G → A;
(u1, u2) 7→ ~r(u1, u2)
38

über eine ebene Parameterfläche G.Wende den ebenen Satz von Stokes auf ein Hilfsfeld ~E(~u) an, das definiert ist als
Ei(~u) = ~E(~r(~u)) · ∂~r∂ui
.
Dies ergibt∮∂G
~E(~u) · d~u =
∫∫G
du1du2
(∂u1E2 − ∂u2E1
)∮∂G
∑i
~E(~r ) · ∂~r∂ui
dui =
∫∫G
du1du2
[(∂~r
∂u1
· ~∇)(
~E · ∂~r∂u2
)−(∂~r
∂u2
· ~∇)(
~E · ∂~r∂u1
)]
Wenden wir die Lagrange-Identität (~a×~b) · (~c× ~d ) = ~a · ~c)(~b · ~d )− (~a · ~d )(~b · ~c )an, folgt∮
∂A
~E(~r ) · d~r =
∫∫G
du1du2
(∂~r
∂u1
× ∂~r
∂u2
)︸ ︷︷ ︸
d~f
·(~∇× ~E
)=
∫A
d~f ·(~∇× ~E
).
Damit ist der Satz von Stokes (1.44) für beliebige gekrümmte Flächen A gezeigt.
Um die Bedeutung der Rotation alsWirbelstärke zu verstehen, betrachten wir nunwieder eine kleine Fläche A um ~r mit Normale ~n, |~n| = 1. Nach Satz von Stokesgilt: ∮
∂A
~E · d~r =
∫A
d~f ·(~∇× ~E
)≈ |A|~n ·
(~∇× ~E
)(~r )
wo |A| der Flächeninhalt von A ist. Damit folgt
~n ·(~∇× ~E
)(~r ) = lim
|A|→0
1
|A|
∮∂A
~E · d~r. (1.47)
Diese Beziehung zeigt, dass die Rotation die lokale Zirkulation pro Fläche = lokale„Wirbelstärke“ bei ~r in einer Ebene ⊥ ~n misst.Daher: Rotation = Wirbelstärke
1.6.4 Vektoranalysis in krummlinigen Koordinaten
Wir betrachten allgemeine Koordinaten, das heißt eine Parametrisierung
R3 → R3;
(u, v, w) 7→ ~r (u, v, w) =
xyz
.
39

Alle 3 Komponenten seien stetig differenzierbare Funktionen und somit existieren
∂~r
∂u= gu(u, v, w)~eu, gu :=
∣∣∣∣∂~r∂u∣∣∣∣ ;
∂~r
∂v= gv(u, v, w)~ev, gv :=
∣∣∣∣∂~r∂v∣∣∣∣ ;
∂~r
∂w= gw(u, v, w)~ew, gw :=
∣∣∣∣ ∂~r∂w∣∣∣∣ ;
wobei ~eu, ~ev, ~ew Einheitsvektoren sind. Damit die Dinge nicht zu kompliziert werden,fordern wir, dass ~eu, ~ev, ~ew paarweise senkrecht aufeinander stehen. Dann heißen dieKoordinaten orthogonal. Beachte, dass wir nicht fordern, dass gu = gv = gw = 1gilt, siehe unten.
Beispiel:
Im Falle von Zylinderkoordinaten gilt
([0,∞)× [−π, π)× R)→ R3;
(ρ, ϕ, z) 7→ ~r :=
ρ cosϕρ sinϕz
⇒ ∂~r
∂ρ=
cosϕsinϕ
0
= ~eρ ⇒ gρ = 1;
∂~r
∂ϕ= ρ
− sinϕcosϕ
0
= ρ~eϕ ⇒ gϕ = ρ;
∂~r
∂z=
001
= ~ez ⇒ gz = 1.
Wie sieht nun ~∇ aus? Formal natürlich immer noch
~∇uvw =
∂∂u∂∂v∂∂w
.
Aber damit können wir grad, div, rot nicht mehr (so leicht) ausdrücken.
1. GradientNach Kettenregel gilt
∂f
∂u=∂f
∂x
∂x
∂u+∂f
∂y
∂y
∂u+∂f
∂z
∂z
∂u= gu
(~eu · ~∇f
).
40

Dabei ist(~eu · ~∇f
)die Gradientenkomponente in Richtung ~eu. Das gilt für
die Richtungen v und w analog und somit
grad f = ~∇f =1
gu
∂f
∂u~eu +
1
gv
∂f
∂v~ev +
1
gw
∂f
∂w~ew.
Damit ist der Gradient bestimmt.
2. Divergenz
Abbildung 1.32: Quader zur Berechnung der Divergenz
Um die Divergenz eines Vektorfeldes in krummlinig-orthogonalen Koordina-ten auszudrücken, betrachten wir eine koordinatenunabhängige Aussage wieden Satz von Gauß. Wir betrachten wieder einen Quader, um die Quellstär-ke zu bestimmen, siehe Abbildung 1.32. Wir erhalten für den Fluss FE einesVektorfeldes ~E
FE =(
(Eugvgw)∣∣∣u+ ∆u
2− (Eugvgw)
∣∣∣u−∆u2
)∆v∆w
+(
(Evgwgu)∣∣∣v+ ∆v
2− (Evgwgu)
∣∣∣v−∆v2
)∆w∆u
+(
(Ewgugv)∣∣∣w+ ∆w
2− (Ewgugv)
∣∣∣w−∆w2
)∆u∆v.
Da das Volumen ∆V = gugvgw ∆u∆v∆w ist, gilt letztlich im Limes ∆V → 0
div ~E = ~∇· ~E = lim∆V→0
FE∆V
=1
gugvgw
(∂
∂u(Eugvgw) +
∂
∂v(Evgwgu) +
∂
∂w(Ewgugv)
).
3. Laplace-OperatorFür ∆f = ~∇ ·
(~∇f)
= div grad f werden die obigen Formeln nur kombiniertund wir erhalten
div grad f = ∆f =1
gugvgw
(∂
∂u
(gvgwgu
∂f
∂u
)+
∂
∂v
(gwgugv
∂f
∂v
)+
∂
∂w
(gugvgw
∂f
∂w
)).
41

4. RotationWir wählen exemplarisch eine kleine Fläche senkrecht zu ~eu, siehe Abbildung??, und bestimmen das Wegintegral entlang deren Rand∮
~E · d~r = (Evgv)∣∣∣w−∆w
2− (Evgv)
∣∣∣w+ ∆w2
+ (Ewgw)∣∣∣v+ ∆v
2− (Ewgw)
∣∣∣v−∆v2.
Daraus ergibt sich mir ∆A = gvgw ∆v∆w für den Flächeninhalt des Rechtecksim Limes ∆A→ 0 die Wirbelstärke pro Fläche
~eu ·(~∇× ~E
)=
1
gvgw
(∂
∂v(gwEw)− ∂
∂w(gvEv)
),
und dies gilt auch mit zyklischen Permutationen des Tripels (u, v, w) für dieanderen Koordinaten. Ausgeschrieben haben wir damit
~∇× ~E =1
gvgw
(∂
∂v(gwEw)− ∂
∂w(gvEv)
)~eu
+1
gwgu
(∂
∂w(guEu)−
∂
∂u(gwEw)
)~ev
+1
gugv
(∂
∂u(gvEv)−
∂
∂v(guEu)
)~ew.
Beispiel:
Im Falle von Zylinderkoordinaten berechnen wir dann
Gradient: grad f = ~∇f =∂f
∂ρ~eρ +
1
ρ
∂f
∂ϕ~eϕ +
∂f
∂z~ez;
Divergenz: div ~E = ~∇ · ~E =1
ρ
∂(ρEρ)
∂ρ+
1
ρ
∂Eϕ∂ϕ
+∂Ez∂z
;
Laplace: div grad f = ∆f =1
ρ
∂
∂ρ
(ρ∂f
∂ρ
)+
1
ρ2
∂2f
∂ϕ2+∂2f
∂z2;
Rotation: rot ~E = ~∇× ~E =
(1
ρ
∂Ez∂ϕ− ∂Eϕ
∂z
)~eρ
+
(∂Eρ∂z− ∂Ez
∂ρ
)~eϕ
+
(1
ρ
∂(ρEϕ)
∂ρ− 1
ρ
∂Eρ∂ϕ
)~ez.
1.7 Maxwellgleichung, Gauß’sches Gesetz
Wir werden zunächst direkt die 1. Maxwellgleichung der Elektrostatik herleiten unddaraus über den mathematischen Satz von Gauß das Gauß’sche Gesetz gewinnen.
42

Dazu berechnen wir die Divergenz des elektrischen Feldes 1.6 einer Ladungsvertei-lung ρ(~r)
~E(~r) =1
4πε0
∫dr′ 3ρ(~r ′)
~r − ~r ′
|~r − ~r ′|3
~∇ · ~E =1
4πε0
∫dr′ 3ρ(~r ′) ~∇ · ~r − ~r
′
|~r − ~r ′|3~ .
Nun müssen wir die Divergenz unter dem Integral berechnen. Zunächst berechnenwir diese für ~r ′ = 0
• Rechnung (siehe Übung)
~∇ · ~rr3
=~∇ · ~rr3
+ ~r · ~∇ 1
r3
=3
r3− ~r · 3
r4
~r
r=
3
r3− 3
r3= 0 !
Gilt nur für r 6= 0, bei r = 0 ist ~rr3 nicht definiert!
• Volumenintegral über der Kugel∫K
dV ~∇ · ~rr3
Gauß=
∫∂K
d~f · ~rr3
=
π∫0
dΘ
2π∫0
dφR2 sin Θ~er ·~er
R2= 4π.
Damit ist ~∇ · ~rr3 eine Funktion die überall Null ist außer bei r = 0, aber deren
Volumenintegral über jede noch so kleine Kugel (der Kugelradius R fällt herausin der Rechnung) den Wert 4π ergibt. Das ist nur möglich, wenn ~∇ · (~r/r3) eineDelta-Funktion der Form
~∇ · ~rr3
= 4πδ(~r) (1.48)
ist. Diese wichtige mathematische Identität werden wir öfter benutzen.
Das entsprechende Ergebnis für beliebiges ~r ′ finden wir durch Verschieben
~∇ · ~r − ~r′
|~r − ~r ′|3= 4πδ(~r − ~r ′).
Das benutzen wir in ~
~∇ · ~E =1
4πε0
∫dr′ 3 ρ(~r ′) 4πδ(~r − ~r ′) =
1
ε0
ρ(~r)
und erhalten die 1. Maxwellgleichung der Elektrostatik
~∇ · ~E =1
ε0
ρ(~r). (1.49)
43

In Worten besagt sie, dass elektrische Felder reine Quellenfelder sind, deren Quell-stärke durch die Ladungsdichte ρ gegeben ist.
Bei der Herleitung dieser Gleichung gingen im wesentlichen drei Eigenschaften desCoulombgesetzes ein (siehe Kapitel 1.5). (e) der Zentralkraftcharakter, (f) die r−2-Abhängigkeit und auch (g) das Superpositionsgesetz über die Integration in derAusgangsgleichung 1.16.
Nun können wir über den mathematischen Gauß’schen Satz die integrale Formder 1. Maxwellgleichung der Elektrostatik gewinnen, die auch Gauß’schesGesetz heißt
FE(∂V ) =
∮∂V
d~f · ~E =
∫V
dV (~∇ · ~E) =
∫V
dV1
ε0
ρ(~r) =QV
ε0
. (1.50)
Dabei istQV die Gesamtladung im Volumen V . In Worten besagt das Gauß’scheGesetz, dass der Fluss des elektrischen Feldes durch die geschlossene Oberfläche∂V eines beliebigen Volumens V gleich der in diesem Volumen eingeschlossenenGesamtladung QV ist.
Das Gauß’sche Gesetz kann benutzt werden, um elektrische Felder von Ladungsver-teilungen zu berechnen. Dabei ist wichtig, dass die Wahl des Volumens V beliebigist. In der Praxis bedeutet das, dass bei der Anwendung des Gauß’schen Gesetzesein der Symmetrie des Problems angepasstes Volumen gewählt wird. Das soll aneinigen wichtigen Beispielen und Anwendungen erläutert werden.
Anwendungen:
1. Homogen geladene Kugel
Für eine homogen geladene Kugel mit Radius R haben wir eine Ladungsdichte
ρ(~r) =
ρ, mit r ≤ R
0, mit r > R
und die Gesamtladung
Q =4π
3R3ρ.
Gesucht sind das elektrische Feld und das Potential.
(i) Zunächst starten wir mit einem Symmetrieargument. Die Ladungsverteilungist rotationssymmetrisch. Daher gilt
~E(D~r) = D ~E(~r),
dabei sei D eine beliebige Drehmatrix. Das heißt, ein elektrisches Feld amgedrehten Ort ist ein gedrehtes Feld. Das legt nahe, dass das elektrische Feldein Zentralfeld sein muss
⇒ ~E(~r) = E(r)~er.
44

Abbildung 1.33: rotationssymmetrisches Zentralfeld
(ii) Im zweiten Schritt benutzen wir das Gauß’sche Gesetz, um den Betrag E(r) zuberechnen. Um die Symmetrieeigenschaft des elektrischen Feldes ~E(~r) nutzenzu können, integrieren wir über das Volumen V einer Kugel mit einem RadiusrK ∫
∂V
d~f · ~E = E(rK)
∫∂V
d~f · ~rr
= 4πr2KE(rK)
Gauß=
∫V
dV1
ε0
ρ(~r) =
1
ε0
ρ4π
3R3,=
Q
ε0
, für rK > R
1
ε0
ρ4π
3r3K =
Q
ε0
r3K
R3, für rK ≤ R.
Also ist
E(r) =
Q
4πε0
1
r2, für r > R,
Q
4πε0
r
R3, für r ≤ R.
(1.51)
Das elektrische Feld ist außerhalb der homogenen Kugel dasselbe wie für einePunktladung Q, die im Ursprung sitzt. Es fällt also mit r−2 ab. Innerhalbder Kugel steigt das elektrische Feld hingegen linear an, siehe Abbildung 1.34links. Bei r = R ist die Feldstärke maximal mit E(R) = Q
4πε0R2 .
Abbildung 1.34: Links: Der Betrag des elektrischen Felds einer homogen geladenenKugel vom Radius R als Funktion von r. Rechts: Der Betrag des GravitationsfeldesFGm
einer homogenen Massekugel mit Radius R als Funktion von r.
45

Dieses Ergebnis ist analog zum Gravitationsfeld einer homogenen Massekugelmit dem gleichen Radius R aus der Physik 1, siehe Abbildung 1.34 rechts.Wenn wir Q
4πε0durch GM ersetzen, gehen die Formeln der Kraftfelder und alle
weiteren Formeln ineinander über.Nun berechnen wir das Potential, das sich für ein Zentralfeld als die negati-ve Stammfunktion von E(r) berechnen lässt. Das Potential ist bis auf eineKonstante bestimmt, die so gewählt wird, dass das Potential im Unendlichenverschwindet. Dann finden wir
Φ(r) =
∞∫r
drE(r) =
Q
4πε0
1
r, für r > R,
− Q
4πε0
1
2
r2
R3+ const, für r ≤ R.
Die Integrationskonstante const für den Innenraum der Kugel bestimmen wirmit Hilfe der Stetigkeit des Potentials an der Stelle r = R
limR→0+
Φ(R) = limR→0−
Φ(R)
⇔ Q
4πε0
1
R= − Q
8πε0
1
R+ const
⇔ const =3
2
Q
4πε0
1
R.
Also ist
Φ(r) =
Q
4πε0
1
r, für r > R,
Q
4πε0
(3
2
1
R− 1
2
r2
R3
), für r ≤ R.
(1.52)
2. (Un-)Stetigkeit des elektrischen Feldes ~E an geladenen Flächen
Wir untersuchen die Stetigkeit des elektrischen Feldes an einer geladenen Fläche mitFlächenladungsdichte σ. Das heißt, wir berechnen jeweils die Differenz der Kompo-nenten der elektrischen Felder ~E1 und ~E2 auf beiden Seiten an der Fläche.
Um die Normalkomponente zu untersuchen, verwenden wir eine kleine sogenannte„Gauß-Box“.
Auf diese „Gauß-Box“ wenden wir das Gauß’sche Gesetz an
FE =
∮∂V
d~f · ~E ≈ A~n · ( ~E2 − ~E1)
Gauß=
∫V
dV1
ε0
ρ(~r) =1
ε0
σ A.
Das führt auf~n · ( ~E2 − ~E1) =
σ
ε0(1.53)
46

Abbildung 1.35: „Gauß-Box“ mit Seitenfläche A, Stirnflächen ≈ 0, Normale ~n mit|~n| = 1.
Das heißt die Normalkomponente En springt an einer Flächenladungsdichte σ.
Sie können dieses Verhalten verifizieren für das Beispiel der geladenen Ebene ausKapitel 1.5.2, das auch in den Übungen behandelt wurde.
Um die Tangentialkomponente zu untersuchen, benutzen wir analog die integraleForm der 2. Maxwellgleichung und betrachten ein Linienintegral entlang der Box.
Die integrale Form der 2. Maxwellgleichung ergibt dann
0Maxwell 2
=
∮~E · d~r ≈ ( ~E2 − ~E1) · ~t L
Das führt zu
~t · ( ~E2 − ~E1) = 0. (1.54)
Das heißt die Tangentialkomponente Et ist stetig an einer Flächenladungsdichteσ.
47

Abbildung 1.36: Betrachte das Linienintegral entlang Box mit dem Tangentialvektor~t mit |~t| = 1.
1.8 Maxwellgleichungen, Poisson-Gleichung, Randwertproble-me
Wir fassen noch einmal die zwei Maxwellgleichungen der Elektrostatik indifferentieller und integraler Form zusammen
~∇ · ~E =1
ε0
ρ(~r)Gauß↔ FE =
∫∂V
d~f · ~E =Q
ε0
~∇× ~E = 0Stokes↔
∮~E · d~r = 0.
(1.55)
differentielle Form↔ integrale Form
Differentielle und integrale Form hängen jeweils über einen Integralsatz zusammen.
1.8.1 Poisson-Gleichung
Wir können aus beiden Maxwellgleichungen eine einzige Gleichung für das PotentialΦ gewinnen. Aus der 2. Maxwellgleichung ~∇ × ~E = 0 folgt die Konservativitätdes elektrischen Feldes und damit die Existenz des Potentials mit ~E = −~∇Φ. Daseingesetzt in die 1. Maxwellgleichung ergibt dann
~∇ · ~E = −~∇ · ~∇Φ = −∆Φ =1
ε0
ρ(~r).
Das ist die sogenannte Poisson-Gleichung
∆Φ = − 1
ε0
ρ(~r), (1.56)
48

die die Elektrostatik vollständig beschreibt.
In (1.56) wird der sogenannte Laplace-Operator
∆ := ~∇ · ~∇ = ∂2x + ∂2
y + ∂2z (1.57)
verwendet, der ein skalarer Ableitungsoperator ist. In Abwesenheit von Ladungenρ(~r) = 0 wird aus der Poisson-Gleichung die sogenannte Laplace-Gleichung
∆Φ = 0 (1.58)
Die Poisson-Gleichung ist eine partielle Differentialgleichung
∆Φ = ∂2xΦ + ∂2
yΦ + ∂2zΦ︸ ︷︷ ︸
linear (in Φ)
= − 1
ε0
ρ(~r)︸ ︷︷ ︸Inhomogenität
. (1.59)
1. Φ = Φ(x, y, z) hängt von drei Raumvariablen ab und der Laplace-Operator∆ enthält alle drei räumlichen partiellen Ableitungen. Eine Differentialglei-chung mit verschiedenen partiellen Ableitungen heißen partielle Differen-tialgleichung.
2. Um genau zu sein, ist die Gleichung (1.59) eine lineare, inhomogene parti-elle Differentialgleichung. Sie heißt linear, weil der Laplace-Operator linearist und inhomogen, weil auf der rechten Seite keine Null steht, sondern einegegebene Funktion.
1.8.2 Randwertprobleme
Bisher wurden beide Maxwellgleichungen (1.55) aus der Coulombkraft her-geleitet. Wir können auch einen anderen Standpunkt einnehmen und von den Max-wellgleichungen ausgehen. Dann wird die Elektrostatik als eine Feldtheorie aufge-fasst, die durch die beiden Maxwellgleichungen (1.55) definiert ist, aus denen oderder äquivalenten Poisson-Gleichung (1.56) Felder, Potentiale, Kräfte, etc. abgeleitetwerden.
In diesem Sinne ist das Grundproblem der Elektrostatik formuliert. Bestimmedie Lösung ~E(~r) der beiden Maxwellgleichungen (1.55) oder die Lösung Φ(~r) derPoisson-Gleichung (1.56) für eine gegebene Ladungsverteilung ρ(~r) und Rand-bedingungen.
Neu ist hier der Begriff der Randbedingungen. Randbedingungen kommen insSpiel, wenn wir Elektrostatik nur in einem begrenzten endlichen Volumen V betrei-ben, in dem wir eine Ladungsverteilung definieren und zusätzlich das elektrische Feldoder das Potential auf dem Rand ∂V von V spezifizieren. Solche Problemstellungenheißen auch Randwertproblem in der Mathematik. Das klassische Randwertpro-blem der Elektrostatik ist die Lösung der Poisson-Gleichung (1.56) für das Potential
49

in einem Volumen V und mit Randbedingungen für das Potential auf dem Rand∂V . Wir nähern uns solchen Problemen in drei Schritten.
I) Ladungsdichte ρ(~r) gegeben auf ganz R3 → keine Randbedingungen
Dann haben wir ein triviales Randwertproblem ohne Rand, und wir können füreine gegebene Ladungsverteilung die Lösung der Poisson-Gleichung (1.56) für dasPotential und das zugehörige elektrische Feld sofort angeben
Φ(~r) =1
4πε0
∫dr′ 3ρ(~r ′)
1
|~r − ~r ′|, (1.60)
~E(~r) =1
4πε0
∫dr′ 3ρ(~r ′)
~r − ~r ′
|~r − ~r ′|3. (1.61)
Daraus hatten wir die Maxwellgleichungen (1.55) hergeleitet. In der Praxis wer-den wir den Gauß’schen Satz häufig benutzen, um das elektrische Feld anstatt derexpliziten Formel auszurechnen.Bemerkung zu (1.60): Die Funktion
G(~r, ~r ′) =1
4π
1
|~r − ~r ′| (1.62)
die unter dem Integral auf der rechten Seite erscheint, wird auch Green-Funktionder Poisson-Gleichung 1.56 im R3 genannt. Eine Green-Funktion ist im Allgemeinenals Lösung einer inhomogenen lineare Differentialgleichung für eine Inhomogenitätδ(~r − ~r ′) definiert.In unserem Fall löst die Green-Funktion G die Poisson-Gleichung mit einer Delta-Inhomogenität,
∆G(~r, ~r ′) = −δ(~r − ~r ′),
da 1ε0G(~r, ~r ′) das Potential einer Punktladung q = 1 bei ~r ′ mit ρ(~r) = δ(~r− ~r ′) ist.
Wir können das mit Hilfe der Rechnung aus 1.7, siehe Formel (1.48), verifizieren
∆1
|~r − ~r ′|= −~∇ · ~r − ~r
′
|~r − ~r ′|3= −4πδ(~r − ~r ′). (1.63)
Wenn die Green-Funktion einer inhomogenen partiellen Differentialgleichung be-kannt ist, können wir Lösungen für beliebige Inhomogenitäten − 1
ε0ρ(~r) durch In-
tegration erhalten
∆G(~r, ~r ′) = −δ(~r − ~r ′)
⇒ ∆
(∫dr′ 3
1
ε0
ρ(~r ′)G(~r, ~r ′)
)=
∫dr′ 3
1
ε0
ρ(~r ′) ∆G(~r, ~r ′)︸ ︷︷ ︸−δ(~r − ~r ′)
= − 1
ε0
ρ(~r).
50

Das führt wieder auf die Lösung (1.60).
II) Ladungsdichte ρ(~r) gegeben im Volumen V mit Randbedingung:Potential Φ(~r) gegeben auf dem Rand ∂V .
Hier sind Ladungen im Innern eines Volumens V und die Werte des Potentialsauf dem Rand vorgegeben. Das ist ein wichtiges Standardproblem, da alle Ober-flächen von Leitern (zum Beispiel Metall) sich auf einem festen Potentialwert Φ =const befinden. Das heißt, sie sind Äquipotentialflächen (zum Beispiel geerdet aufΦ = 0).
Um das einzusehen, wollen wir einige Eigenschaften von Leitern festhalten. EinLeiter ist dadurch definiert, dass er frei verschiebbare Ladungen enthält.
Das führt unmittelbar dazu, dass innerhalb eines Leiters immer das elektrische Feldverschwindet. Es gilt
~E = −~∇Φ = 0 oder Φ = const. (1.64)
Wenn das nicht der Fall wäre, wirkt auf eine frei bewegliche Ladung q eine Kraft~F = q ~E, die die Ladung sofort in Bewegung versetzt. Der einzige stationäreZustand muss kräftefrei sein und es ist ~F = ~E = 0.
Eine ähnlich wichtige Feststellung ist, dass das elektrische Feld immer normal aufeiner leitenden Oberfläche stehen muss. Auch hier gibt es ansonsten Kräfte auf diebeweglichen Ladungen in Tangentialrichtung, die dazu führen, dass Ladungen tan-gential zur Oberfläche fließen. Der einzige stationäre Zustand ist der ohne solcheTangentialkräfte. Das elektrische Feld besitzt deshalb keine Tangentialkompo-nente. Das ist konsistent damit, dass der (negative) Gradient des Potentials, daselektrische Feld, senkrecht auf einer Äquipotentialfläche stehen muss, siehe Kapitel1.5.2
elektrische Feld︸ ︷︷ ︸−~∇Φ
⊥ Äquipotentialfläche︸ ︷︷ ︸Φ = 0
.
Beispiel 1:
Wir betrachten als erstes Beispiel eine Punktladung und einen unendlichen leitendengeerdeten Ebene mit Φ = 0.
Aus unseren Feststellungen zu Leitern folgt.
(a) Im Leiter ist ~E = 0.(b) Die Normalkomponente En vor dem Leiter springt nach 0 an der Leiterober-
fläche.(c) Das wird bewirkt durch eine Flächenladung an der Leiteroberfläche, siehe
(1.53). Diese Flächenladung besteht aus Influenzladungen, die aus der „Erde“zur q zugewandten Leiteroberfläche geflossen sind.
51

Abbildung 1.37: Zum Beispiel eine Punktladung q vor unendlicher leitender Ebenemit Φ = 0. Geerdet bedeutet, dass Ladung nachfließen kann.
(d) Es ist E = 0 hinter der unendlichen Platte.
Die Lösungsidee behauptet, dass die Leiteroberfläche zur Äquipotentialfläche wird,wenn sie symmetrisch in der Mitte zwischen zwei Ladungen q und −q liegt. Dasführt zur Methode der Bildladungen.
Methode der Bildladungen
Wir lösen das Randwertproblem mit Hilfe des Ansatzes einer symmetrisch außerhalbvon V platzierten entgegengesetzten “Bildladung” :
• Punktladung q bei ~rA und Bildladung −q bei ~rB = (~rA an Ebene gespiegelt)• ~rA ∈ V , ~rB /∈ V , daher gilt in V :
1. ∆ΦA = − qε0δ(~r − ~rA)
52

Abbildung 1.38: links: reales Problem, rechts: Spiegelladung
2. ∆ΦB = qε0δ(~r − ~rB) = 0 ∀~r ∈ V
3. ∆(ΦA + ΦB) = − qε0δ(~r − ~rA) in V , dies löst die Poissongleichung in V !
Für das Weitere ist es bequem, die leitende Ebene in die xy-Ebene (z = 0) zu legenund den Ursprung innerhalb dieser Ebene “unter” den Punkt ~rA zu legen, so dass~rA = rA ~ez und ~rB = −~rA gilt.
Für das Potential gilt dann
Φ(~r ) =q
4πε0
( 1
|~r − ~rA|︸ ︷︷ ︸ΦA
− 1
|~r + ~rA|︸ ︷︷ ︸ΦB
).
(1.65)
Liegt ~r in der xy-Ebene, so gilt ~r · ~rA = 0, also
(~r − ~rA)2 = r2 + r2A − 2~r · ~rA
= r2 + r2A + 2~r · ~rA
= (~r + ~rA)2
Damit gilt |~r−~rA| = |~r+~rA| für alle ~r in der leitenden Ebene. Damit folgt in (1.65)sofort, dass tatsächlich Φ(~r ) = 0 in der leitenden Ebene gilt. Also ist (1.65) diegesuchte Lösung unseres Randwertproblems mit
∆Φ = − q
ε0
δ(~r − ~rA);
Φ(~r ) = 0 auf ∂V.
Das zugehörige elektrische Feld ergibt sich aus dem negativen Gradienten
~E = −~∇Φ =q
4πε0
(~r − ~rA|~r − ~rA|3
− ~r + ~rA|~r + ~rA|3
). (1.66)
53

Direkt an der leitenden xy-Ebene, wo |~r − ~rA| = |~r + ~rA| gilt, erhalten wir
~E =q
2πε0
−~rA|~r − ~rA|3
,
also ist das elektrische Feld parallel zu ~ez und steht damit in der Tat senkrecht auf derleitenden Ebene z = 0. Direkt an der leitenden Ebene z = 0 kann ~E(~r ) = Ez(x, y)~ezgeschrieben werden mit
Ez(x, y) =q
2πε0
−rA(x2 + y2 + r2
A)3/2. (1.67)
Die induzierte Flächenladungsdichte können wir aus dem Sprung der Normal-komponente des elektrischen Feldes an der leitenden Ebene berechnen, siehe Glei-chung (1.53). In und hinter der leitenden Ebene (also für z < 0) gilt ~E = ~0, direktan der leitenden Ebene bei z = 0 ist ~E = Ez(x, y)~ez mit obigem Ez(x, y). Also er-halten wir für den Sprung in der Normalkomponente Ez und der damit verbundenenFlächenladungsdichte nach (1.53)
1
ε0
σ(x, y) = Ez(x, y)− 0
und somit
σ(x, y) =q
2π
−rA(x2 + y2 + r2
A)3/2. (1.68)
Wir sehen sofort, dass σq < 0, also hat die induzierte Flächenladung wie erwartetgegenüber der ursprünglichen Ladung das entgegengesetzte Vorzeichen. Die Flä-chenladungsdichte ist rotationssymmetrisch in der xy-Ebene, hängt also nur vonr‖ := (x2 + y2)
1/2 ab
σ(x, y) =q
2π
−rA(r2‖ + r2
A
)3/2.
In dieser Form ist die Form der Flächenladungsdichte in Abbildung 1.39 skizziert.
Abbildung 1.39: Flächenladung σ als Funktion der Entfernung vom Ursprung. Beir‖ = rA/2 ist ein Wendepunkt.
54

Wir berechnen abschließend noch die gesamte induzierte Ladung durch Integrationüber die Fläche
qσ =
∫ ∞0
dr‖ r‖ 2π σ(r‖)
= − q
r2A
∫ ∞0
dr‖ r‖1(
r2‖/r
2A + 1
)3/2
=x=r‖/rA
−q∫ ∞
0
dx x1
(x2 + 1)3/2
=y=x2
−2q
∫ ∞0
dy1
(y + 1)3/2
=q
(y + 1)1/2
∣∣∣∣∞0
= −q.
Wie zu erwarten ist die gesamte induzierte Ladung genau −q, also gleich der Bild-ladung.
Allgemein lässt sich die Methode der Bildladungen zur Lösung von Randwert-problemen wie folgt stichpunktartig zusammenfassen:
• Wir können „Hilfsladungen“ außerhalb von V platzieren
⇒ ändern Ladungsverteilung ρ(~r ) in V nicht⇒ das von Hilfsladungen erzeugte Potential ΦH erfüllt ∆ΦH = 0 in V (*)
I) Sei Φ das Potential ohne Randbedingung, dieses erfüllt die Poissonglei-chung∆Φ = −ρ(~r )
ε0in V .
II) Potential ΦH der Hilfsladung erfüllt ∆ΦH = 0 in V
⇒ ∆(Φ + ΦH) = −ρ(~r )ε0
in V erfüllt immer noch die Poissongleichung in V .
Auch mit beliebigen zusätzlichen Hilfsladungen außerhalb von V bleibt dasGesamtpotential eine Lösung der Poissongleichung. Diese zusätzliche Freiheitnutzen wir, um die Randbedingungen auf ∂V zu erfüllen.
• Wähle Position, Vorzeichen und Betrag der Hilfsladungen so, dass Φ + ΦH dieRandbedingungen auf dem Rand ∂V erfüllt.
• Oft erfolgt die Lösung von Problemen mit Φ = 0 auf ∂V durch symmetrischbezüglich ∂V angeordnete Bild- und Spiegelladungen mit entgegengesetztenVorzeichen.
Bemerkung zu (*): ΦH erfüllt die Laplace-Gleichung ∆ΦH = 0 in V und wird des-halb auch „harmonische Funktion“ in V genannt. Solche harmonischen Funktionensind also offensichtlich wichtig, um das Randwertproblem zu lösen. Daher haben har-monische Funktionen für spezielle Koordinatensysteme auch besondere Namen, die
55

insbesondere im Englischen auch noch an ihre Harmonizität erinnern, zum Beispieldie “spherical harmonics” (“Kugelflächenfunktionen” auf Deutsch) in Kugelkoordi-naten. Diese speziellen Funktionen behandeln wir hier noch nicht, dies wird in derPhysik 3 und 4 geschehen in etwas anderem Kontext (stehende Wellen, Quantenme-chanik).
Beispiel 2:
Als zweites Beispiel betrachten wir eine Punktladung vor einer geerdeten leitendenKugel mit Φ = 0:
Abbildung 1.40: zu Beispiel 2 (V=Außenraum, lege Ursprung ~0 in den Kugelmittel-punkt, Radius R).
Wieder ist eine Bildladung so zu platzieren, dass die Leiteroberfläche, also in die-sem Fall die Kugeloberfläche, zur Äquipotentialfläche wird. Zunächst einige einfacheÜberlegungen zu dieser Bildladung:
• Bildladung qB liege außerhalb von V , also in der Kugel• Damit das elektrische Feld in Punkt C senkrecht zur Kugeloberfläche steht,sollte ~rB parallel zu ~rA sein (beide Ladungen auf einer Linie)
• Somit nutzen wir auch die bestehende Rotationssymmetrie um die Achse ~rAaus und brechen sie nicht durch die Bildladung.
• |~rB| und qB sind noch zu bestimmen
Eine Bildladung qB bei ~rB führt zu folgendem Ansatz für das Potential
Φ(~r ) =q
4πε0
1
|~r − ~rA|+
qB4πε0
1
|~r − ~rB|mit ~rA = rA ~eA , ~rB = rB ~eA , ~r = r ~er;
~er · ~eA = cosϕ;
Φ(~r ) =q
4πε0
1
r
(1∣∣~er − rAr~eA∣∣ +
qBq
1∣∣~er − rBr~eA∣∣).
Ferner gilt für diesen Ansatz die Bedingung Φ = 0 auf der Kugel mit |~r | = R∣∣∣~er − rBR~eA
∣∣∣ = −qBq
∣∣∣~er − rAR~eA
∣∣∣ .56

Wir lesen sofort qBq< 0 ab. Dann quadrieren wir(
1 +r2B
R2− 2
rBR
cosϕ
)=q2B
q2
(1 +
r2A
R2− 2
rAR
cosϕ
)∀ϕ. (1.69)
Diese Bedingung ist für alle Winkel ϕ zu erfüllen. Dies impliziert (mehr dazu inPhysik 3 unter dem Stichwort Fourierzerlegung), dass sowohl der konstante Beitragin (1.69) als auch der Vorfaktor des cosϕ-Beitrags auf beiden Seiten übereinstimmenmüssen. Dies ergibt zwei Gleichungen für die zwei Unbekannten qB und rB,
q2B
q2
rAR
=rBR
⇒ q2B
q2=rBrA
; (1.70)
q2B
q2
(1 +
r2A
R2
)=
(1 +
r2B
R2
); (1.71)
die nach kurzer Rechnung folgende Lösung liefern
rB =R2
rA;
qB = −q RrA.
Das Randwertproblem wird also gelöst durch
Φ(~r ) =q
4πε0
(1
|~r − ~rA|− R/rA|~r − ~rA ·R2/r2
A|
). (1.72)
Beispiel 3:
Punktladung zwischen 2 unendlichen geerdeten ebenen Leitern.
Abbildung 1.41: Hier sind unendlich viele Spiegelladungen nötig, da auch jede Spie-gelladung eine Spiegelladung bezüglich der anderen Platte braucht. Zusammenge-hörige Spiegelladungen sind durch Bögen gekennzeichnet.
Dieses Randwertproblem kann nur durch unendlich viele im Vorzeichen alternieren-de Spiegelladungen gelöst werden, so dass Ladung und jede Spiegelladung bezüglich
57

beider Platten eine Spiegelladung hat, siehe Abbildung 1.41. Tatsächlich konver-giert die resultierende unendliche Reihe für das Potential, da die Terme im Betragabnehmen und im Vorzeichen alternieren.
III) Allgemeinste Form des Randwertproblems:
ρ(~r ) gegeben im Volumen V , also ∆Φ = −ρ(~r )ε0
in V undentweder Φ(~r ) oder ~∇Φ · ~n = ∂Φ
∂n= −En gegeben auf Rand ∂V .
−∂Φ∂n
= En ist die Normalkomponente des elektrischen Feldes zur Randfläche ∂V(mit ~n parallel zu d~f und |~n| = 1).
Für die beiden möglichen Randbedingungen, das Potential Φ selbst oder die Normal-komponente des elektrischen Feldes En auf dem Rand vorzugeben, gibt es bestimmteBezeichnungen:
Φ gegeben auf ∂V → Dirichlet-Randbedingung∂Φ∂n
gegeben auf ∂V → Neumann-Randbedingung
Es gilt folgender wichtiger Satz:
Jedes Randwertproblem der allgemeinen Form III ist eindeutig lösbar.
Dazu brauchen wir den Integralsatz von Green, der sich als Korollar aus demGauß’schen Integralsatz ergibt. Wir betrachten 2 Funktionen Ψ und Φ. Dann giltdie Produktregel
~∇ ·(
Φ~∇Ψ)
= ~∇Φ · ~∇Ψ + Φ∆Ψ
Nun integrieren wir über ein Volumen V und benutzen den Satz von Gauß∫V
dV (Φ∆Ψ) = −∫V
dV(~∇Φ · ~∇Ψ
)+
∫∂V
d~f ·(
Φ~∇Ψ). (1.73)
Dies ist der zweite Greensche Satz.
Nun betrachten wir 2 Lösungen Φ1 und Φ2 von III, also
∆Φ1 = ∆Φ2 = ρ(~r )ε0
in V und
a) Φ1 = Φ2 gegeben auf ∂V (Dirichlet) oder
b) ∂Φ1
∂n= ∂Φ2
∂ngegeben auf ∂V (Neumann)
58

Dann erfüllt die Differenz Ψ := Φ1 − Φ2
∆Ψ = 0 in V und (1.74)
Ψ = 0 auf ∂V oder∂Ψ
∂n= 0 auf ∂V. (1.75)
Nun wenden wir den Greenschen Satz (1.73) mit Φ = Ψ an und finden∫V
dV (Ψ ∆Ψ︸︷︷︸=0
) = −∫V
dV(~∇Ψ)2
+
∫∂V
d~f ·(
Ψ~∇Ψ)
︸ ︷︷ ︸∫∂V
∣∣∣d~f ∣∣∣Ψ∂Ψ
∂n= 0
.
Das Integral links ergibt Null wegen (1.74), das Integral rechts ergibt Null für beidemöglichen Randbedingungen (1.75). Daher folgt∫
V
dV(~∇Ψ)2
= 0.
Dieses Integral kann nur Null werden, wenn ~∇Ψ überall verschwindet. Wir findenalso
~∇Ψ = 0;
⇒ Φ1 = Φ2 + const.
Für Dirichlet-Randbedingungen gilt Ψ = 0 auf dem Rand und daher folgt const = 0,das heißt die Differenz zwischen zwei Lösungen verschwindet immer, also ist die Lö-sung eindeutig. Für Neumann-Randbedingungen kann die Konstante const nichtweiter eingeschränkt werden und es folgt nur, dass die Lösung eindeutig bis auf eineKonstante ist. Solche Konstanten sind aber unwichtig, da das elektrische Feld (dieeigentliche physikalisch relevante Größe) als negativer Gradient trotzdem eindeutigist.
1.8.3 Elektrische Felder in Leitern
Wir haben einige Eigenschaften von Leitern schon diskutiert an Hand der Rand-wertprobleme. Wir vervollständigen die Diskussion in diesem Abschnitt.
Wir definieren einen Leiter als einen Körper der frei bewegliche Ladungen ent-hält.
Das beste Beispiel für Leiter sind Metalle. Im Metall lösen sich die Leitungselek-tronen von den Atomrümpfen und bilden ein “Elektronengas” aus frei beweglichennegativ geladenen Elektronen. Die positiv geladenen Atomrümpfe bleiben lokali-siert in einem Kristallgitter. Sie bilden einen festen positiv geladenen Hintergrund,so dass der Festkörper insgesamt neutral ist. Dies ist die einfachste Vorstellung(Drude-Modell), mehr dazu in der Festkörperphysikvorlesung.
59

Im Inneren des Leiters ist ~E = ~0 und Φ = const. (1.76)
Andernfalls wirken sofort Kräfte ~F = q ~E auf eine frei bewegliche Ladung q undsetzen diese in Bewegung. Der stationäre Zustand muss also kräftefrei sein. Kraft-freiheit ~F = ~0 impliziert aber ~E = ~0 und damit Φ = const. Dieser Sachverhaltkann auch so ausgedrückt werden: Durch die Verschiebung der frei beweglichen La-dungen zur Oberfläche (siehe unten) wird im Leiter ein Gegenfeld erzeugt, dass dasursprüngliche elektrische Feld genau kompensiert, siehe Abbildung 1.42.
Abbildung 1.42: Gegenfeld
Die wichtigste Anwendung von (1.76) ist der Faradaysche Käfig, der seinen Namenoffensichtlich deshalb trägt, weil wir im Leiter hier noch zusätzliche Hohlräumehaben. Unser Resultat (1.76) gilt tatsächlich auch, wenn der Leiter „Löcher“ hat,solange dort ρ = 0, also keine Extraladung eingebracht ist. Dazu machen wir unsklar, dass ~E = ~0 im gesamten Leiterinneren eine Lösung des Randwertproblems ist
~E = ~0, Φ = const im Leiter~∇× ~E = ~0 und ~∇ · ~E = ρ/ε0 = 0⇒ ∆Φ = 0 im Loch,⇒ ~E = ~0, Φ = const triviale Lösung der Poissongleichung im Loch.
Nun wissen wir aber bereits, dass Lösungen von Randwertproblemen eindeutig sind.Daher gibt es keine anderen Lösungen außer ~E = ~0. Es ist auch ersichtlich, dass dieSituation sich ändert, wenn sich Extraladungen im Loch befinden.
Abbildung 1.43: Faraday-Käfig mit Loch
Beispiel: Faraday-Käfig im Deutschen Museum
60

Abbildung 1.44: Faraday-Käfig im Deutschen Museum
Originalerläuterung: “Mit Wechselspannung von 50 Hertz (entsprechend der Frequenzder häuslichen Spannungsversorgung) wird besonders eindrucksvoll die abschirmendeWirkung eines Faradayschen Käfigs gegen elektrische Felder nachgewiesen, indemeine gegen Erde isolierte Drahtgitterkugel auf Hochspannungspotential gebracht wird,nachdem darin eine Person Platz genommen hat. Die im Inneren feldfreie Faraday-sche Kugel hat einen Durchmesser von 120 cm. Sie ist über zwei nebeneinanderangeordnete Langstab-Isolatoren gegen die Traverse isoliert und kann vom Bedie-nungspult aus so weit gesenkt werden, dass eine Person darin Platz nehmen kann.Danach wird die Kugel hochgezogen und der Prüftransformator so stark erregt, dasses an der zu den Langstab-Isolatoren parallelen 70-cm-Funkenstrecke bei etwa 270kV zum Durchschlag kommt und der Laie sieht, dass die Kugel tatsächlich auf Hoch-spannung gebracht wurde.”
Das elektrische Feld steht außen senkrecht auf der Leitero-berfläche.
(1.77)
Sonst gibt es eine Kraftkomponente Ft = qEt tangential zur Leiteroberfläche aufbeweglichen Ladungen und die Ladungen setzen sich entlang der Oberfläche in Be-wegung. Der stationäre Zustand muss also Ft = 0 erfüllen, was wiederum Et = 0impliziert.
Aber: Eine Normalkomponente En 6= 0 ist natürlich möglich, da Ladungen denLeiter nicht senkrecht zur Oberfläche verlassen können und in diese Richtung Kräftedeshalb nicht verschwinden müssen.
Aus (1.76) und (1.77) folgt, dass die Normalkomponente En unstetig ist an derLeiteroberfläche.
61

Nach dem Gauß’schen Gesetz und unseren Überlegungen aus Kapitel 1.7, Formel(1.53) muss es dann eine Flächenladungsdichte σ an der Oberfläche des Leiters geben
σ
ε0
= En (außen) ;
En (innen) = 0;
dies ist die Influenzladung. Diese bewirkt dann auch das Gegenfeld, so dass ~E = ~0im Leiter.
Im Leiterinnern gilt ~E = ~0, also gibt es auch keine Nettoladungsdichte nach Maxwell
ρ = ε0~∇ · ~E = 0.
Unterschied zwischen geerdeten und nicht geerdeten Leitern:
1. geerdeter Leiter, Φ = const, siehe Abbildung 1.45.
• Ladungsreservoir → Leiter lädt sich bis zur Influenzladung auf• Influenzladung bewirkt ~E = ~0 im Innern
2. isolierter Leiter, siehe Abbildung 1.46
• Leiter neutral• zusätzlich zur Influenzladung auf Oberfläche entgegengesetzte Ladung
gleichmäßig auf Oberfläche verteilt: Die Ladung außen und die Influenz-ladung führen zu einer kräftefreien Situation mit ~E = ~0. Wenn wir danndie Zusatzladung aufbringen, verteilt sie sich gleichmäßig über der Ober-fläche wegen der Abstoßung gleicher Ladungen.
• Dadurch wird typischerweise etwas mehr Feldstärke “hinter” dem Leitergemessen als im geerdeten Fall (im Leiter gilt natürlich nach wie vor~E = ~0 ).
Abbildung 1.45: geerdeter Leiter Abbildung 1.46: isolierter Leiter
Spitzeneffekt:
Das elektrische Feld ist an Leiteroberflächen invers proportional zum Krüm-mungsradius.
62

Zunächst betrachten wir das Potential Φ und die Normalkomponente der elektri-schen Feldstärke En an der Oberfläche einer geladenen Kugel mit Radius R
Φ =Q
4πε0
1
R;
En =Q
4πε0
1
R2;
⇒ En =Φ
R.
Bei Kugeln auf gleichem Potential ist also das zur Oberfläche senkrechte elektrischeFeld En ∝ 1
Rinvers proportional zum Krümmungsradius der Kugel.
Nun kann jede Leiteroberfläche lokal durch Kugeln approximiert werden, die alleleitend verbunden sind und auf gleichem Potential liegen. Dann ist das elektrischeFeld an der Leiteroberfläche invers proportional zum lokalen Krümmungsradius. AnStellen, wo der Krümmungsradius klein ist, also zum Beispiel an Spitzen, ist daselektrische Feld also besonders hoch, siehe Abbildung 1.47.
Abbildung 1.47: Von zwei Metallkugeln mit gleicher Ladung hat die kleinere dasgrößere Potential und die größere Feldstärke an der Oberfläche. Aber auch bei glei-chem Potential ist das Feld an der kleinen Kugel größer. An feinen Spitzen könnendaher sehr hohe Felder herrschen.
63

Abbildung 1.48: Der Ortsvektor |~r| im Fernfeld einer Ladungsverteilung ρ(~r ′)
1.9 Multipole
Wir hatten bereits das Potential einer homogen geladenen Kugel im Ursprungund einer Gesamtladung q für r > R berechnet
Φ(r) =q
4πε0
1
r
und festgestellt, dass es sich für r > R wie das Potential einer Punktladung verhält.Es stellt sich die Frage, ob es ähnlich einfache Resultate für das Fernfeld beliebigerLadungsverteilungen ρ(~r) gibt, auch wenn die Ladungsverteilung unsymmetrischerals die einer Kugel ist. Wir fragen nach dem Potential Φ(~r) eine Ladungsverteilungρ(~r ′) um den Ursprung ~r ′ = 0 an einem Beobachtungspunkt ~r der weit entfernt istim Vergleich zur Ausdehnung der Ladungsverteilung.
Wir betrachten exemplarisch dazu zwei wichtige diskrete Ladungverteilungen, denDipol und den Quadrupol.
Dipol Quadrupol
1.9.1 Dipol und Quadrupol
Wir beginnen mit dem Dipol, der aus zwei Ladungen q,−q im Abstand a besteht.Der Verbindungsvektor ~a zeigt von −q nach q. Wir setzen die Ladung −q in denUrsprung der Einfachheit halber, siehe Abbildung 1.49.
Das Potential erhalten wir dann durch Superposition
ΦD(~r) =q
4πε0
(− 1
|~r|+
1
|~r − ~a|
). (1.78)
In der Fernzone |~r| |~a| wollen wir dieses Ergebnis nähern und vereinfachen durcheine Taylorentwicklung in ~a.
64

Abbildung 1.49: Dipol mit der Ladung −q bei ~0 und der Ladung q bei ~a
Dazu erinnern wir uns zunächst an das mathematische Hilfsmittel der Taylorent-wicklung 1. Ordnung in drei Dimensionen. Die Taylorentwicklung einer beliebigenFunktion f(~r) = f(x1, x2, x3) um einen Punkt ~r0 = (x0,1, x0,2, x0,3) lautet bis zurersten Ordnung
f(~r) = f(~r0) +3∑i=1
∂f
∂xi(~r0)(xi − x0,i) +O
((~r − ~r0)2
)= f(~r0) + (~∇f)(~r0) · (~r − ~r0) +O
((~r − ~r0)2
). (1.79)
Die Taylorentwicklung approximiert f(~r) bei ~r0 durch eine Potenzreihe in linearerOrdnung. In drei Dimensionen treten im Allgemeinen alle drei möglichen linearenGlieder (xi − x0,i) für i ∈ 1, 2, 3 auf.Bei unserem Dipol entwickeln wir f(~a) := 1
|~r−~a| in ~a um ~a0 = 0 bis zur linearenOrdnung
1
|~r − ~a|=
1
|~r|+
(~∇~a
1
|~r − ~a|
)(0) · ~a+O(a2).
Die Berechnung des Gradienten auf der rechten Seite verläuft wie bei der Berechnungdes elektrischen Feldes
~∇~a1
|~r − ~a|= ~∇ 1
r
∣∣∣∣r= |~r−~a|
=~r − ~a|~r − ~a|3
und wir erhalten
1
|~r − ~a|=
1
r+~a · ~rr3
+O(a2)
⇒ ΦD(~r) =q
4πε0
~a · ~rr3
+O(a2). (1.80)
Offensichtlich geht die Information über die Ladungsverteilung nur über die Größe
~p := q~a, (1.81)
65

demDipolmoment ein. Das Dipolmoment bestimmt das Potential in der Fernzone.
Das Ergebnis (1.80) wird exakt im Limes
~a→ 0, q →∞, so dass p = const (1.82)
In diesem Limes haben wir einen „echten“ Dipol genau bei ~r = 0.
Wenn wir das Potential einer Ladung und das eines Dipols vergleichen, finden wireinen wichtigen Unterschied
Ladung : Φ ∝ 1
r
Dipol : ΦD ∝1
r2
Das Potential eines Dipols fällt schneller ab als das einer Ladung und ist folglichschwächer im Fernfeld . Es ist keinesfalls so, dass sich die Potentiale der beidenentgegengesetzten Ladungen im Dipol ganz auslöschen, das heißt, dass auch eineneutrale Ladungsverteilung ein Potential verursachen kann.
Nun wollen wir die Kräfte und Drehmomente betrachten, die auf einen Dipol ineinem äußeren elektrischen Feld ~E wirken.
Die Kraft auf einen Dipol bei ~r im äußeren elektrischen Feld ~E(~r) ist
~FD = −q ~E(~r) + q ~E(~r + ~a)
~E(~r + ~a)Taylor
= ~E(~r) + (~a · ~∇) ~E(~r) +O(~a 2),
woraus folgt~FD = q(~a · ~∇) ~E = (~p · ~∇) ~E. (1.83)
Wenn das elektrische Feld ~E konstant beziehungsweise homogen ist, dann gilt~FD = 0, da im homogenen elektrischen Feld keine Kraft auf einen Dipol wirkt.
Das Drehmoment bezüglich einer Achse durch −q im äußeren elektrischen Feld~E(~r) ist gegeben durch
~MD =− q(~0× ~E(~r)) + q(~a× ~E(~r + ~a))
=q~a× ~E(~r) + q~a× (~a · ~∇) ~E +O(~a 3)
also gilt~MD = ~p× ~E(~r) +O(a2). (1.84)
In einem homogenen elektrischen Feld gibt es daher ein Drehmoment, aber keineKraft auf einen Dipol, siehe Abbildung 1.50.
66

Abbildung 1.50: In homogenem elektrischen Feld ~E = const existiert nur ein Dreh-moment auf Dipol.
Nun berechnen wir das elektrische Feld, das vom Dipol erzeugt wird, indem wir dennegativen Gradienten des Potentials ΦD aus (1.80) bilden. Wir erhalten
~ED(~r) = −~∇ΦD =1
4πε0
(3(~r · ~p)~rr5
− ~p
r3
), (1.85)
wobei wir die Produktregel ~∇(ab) = b~∇a+ a~∇b für die zwei skalaren Funktionena = (~p · ~r) und b = 1
r3 mit
~∇a = ~∇(~p · ~r) = ~p
~∇b = ~∇ 1
r3= − 3
r4
~r
r
benutzt haben.
Wir können das elektrische Feld in Kugelkoordinaten umschreiben. Wir wählen dazudie z-Achse so, dass ~p parallel zu ~ez ist, und benutze ~r = r~er und ~ez = − sinϑ · ~eϑ +cosϑ · ~er. Dann erhalten wir
~ED(~r) =p
4πε0r3(sinϑ · ~eϑ + 2 cosϑ · ~er). (1.86)
Aus dieser Darstellung heraus lässt sich leichter veranschaulichen, wie die elektri-schen Feldlinien verlaufen, siehe Abbildung 1.51.
Abbildung 1.51: E-Fernfeld um einen Dipol.
67

Abbildung 1.52: Einfachste Darstellung eines Quadrupols aus vier Ladungen
So wie der Dipol aus zwei entgegengesetzten Ladungen besteht, ergeben zwei entge-gengesetzte Dipole einen Quadrupol, der insgesamt aus vier Ladungen bestehtund so ausgebaut ist, dass er im Fernfeld kein Monopol und auch kein Dipol ist,siehe Abbildung 1.52.
Der Quadrupol hängt von dem Vektor ~p der Dipolmomente und vom Verbindungs-vektor ~d zwischen den Dipolen ab, also von zwei unabhängigen Vektoren. Aus diesenbeiden Vektoren wird ein Tensor zweiter Stufe aufgebaut, der QuadrupoltensorQ (siehe unten), der die gleiche Information enthält. Tensoren zweiter Stufe sindfür uns quadratische Matrizen, die wir im Skript zur Unterscheidung von anderenGrößen fettgedruckt bezeichnen.
Wir beginnen, indem wir das Potential des Quadrupols als Superposition der beidenDipolpotentiale aufschreiben
ΦQ(~r) = Φ~p(~r − ~d) + Φ−~p(~r)
=1
4πε0
(~p · (~r − ~d)
|~r − ~d|3− ~p · ~r
r3
).
In der Fernzone |~r| |~d| nähern wir das Ergebnis durch eine Taylorentwicklung in~d um ~d0 = ~0
~p · (~r − ~d)
|~r − ~d|3≈ ~p · ~r
r3− ~∇
(~p · ~r|~r|3
)· ~d
=~p · ~rr3
+
(−~pr3
+3(~p · ~r)~rr5
)· ~d.
Wir erhalten damit bis auf Terme O(d2)
ΦQ(~r) =1
4πε0
1
r5
(3(~p · ~r)(~d · ~r)− r2(~p · ~d)
)=
1
4πε0
1
2
3∑i,j=1
xixjr5
(6pidj − 2δij∑k
pkdk)︸ ︷︷ ︸:= Q
, (1.87)
worin wir den Quadrupoltensor Q eingeführt haben, der hier die gesamte Infor-mation über die Ladungsverteilung enthält. Interpretieren wir ihn als Matrix Q, so
68

Abbildung 1.53: Es ist ρ(~r ′) = 0 für |~r ′| ≥ R, wobei R die Ausdehnung derLadungsverteilung ρ(~r) ist.
können wir ΦQ kompakt schreiben als
ΦQ(~r) =1
4πε0
1
2r5~r ᵀQ~r. (1.88)
Wenn wir die Potentiale von Ladung, Dipol und Quadrupol vergleichen, stellen wirfest
Monopol : Φ ∝ 1
r
Dipol : ΦD ∝1
r2
Quadrupol : ΦQ ∝1
r3.
Das Potential des Quadrupols fällt also noch schneller mit dem Abstand r ab undist damit schwächer im Fernfeld als das vom einem Monopol oder Dipol.
1.9.2 Elektrische Multipolentwicklung
Nun wollen wir uns dem allgemeinen Fall zuwenden und das Fernfeld einer räumlichbegrenzten beliebigen Ladungsverteilung ρ(~r ′) betrachten. Räumlich begrenztheißt, dass es eine Ausdehnung R gibt, so dass die Ladungsdichte verschwindet füralle |~r ′| > R oder sehr schnell gegen 0 konvergiert, siehe Abbildung 1.53.
Wir fragen nun, wie sich das Potential Φ(~r), dass wir zunächst mit Hilfe des üblichenSuperpositionsgesetzes als
Φ(~r) =1
4πε0
∫dr′ 3ρ(~r ′)
1
|~r − ~r ′|(1.89)
schreiben, im Fernfeld für weit entfernte Beobachtungspunkte |~r| R ≥ |~r ′| verhält.Dazu wollen wir in (1.89) eine Taylorentwicklung vornehmen in ~r ′ für |~r ′| |~r|,also um ~r ′0 = 0.
69

Wir betrachten zunächst die Taylorentwicklung in zweiter Ordnung einer beliebigenFunktion f(~r) = f(x1, x2, x3) in drei Raumdimensionen
f(~r) = f(~r0) + ~∇f(~r0) · (~r− ~r0) +1
2
3∑i,j=1
∂i∂jf(~r0)(xi − x0,i)(xj − x0,j) +O(~r− ~r0)3,
(1.90)wobei die Matrixelemente ∂i∂jf(~r0) die sogenannte symmetrische „Hesse-Matrix“der zweiten Ableitung bilden.
Diese Taylorentwicklung approximiert f(~r) bei ~r0 durch ein Polynom zweiter Ord-nung . Der lineare Anteil ist bekannt aus Gleichung (1.79). Während in einer Dimen-sion nur Glieder x− x0 und (x− x0)2 auftauchen, können in drei Raumdimensionenalle möglichen linearen Glieder (xi − xi,0) für i ∈ 1, 2, 3 und alle möglichen qua-dratischen Glieder (xi−xi,0)(xj−xj,0) für i, j ∈ 1, 2, 3 auftreten. Die quadratischeTaylorentwicklung nähert eine Funktion in drei Raumdimensionen durch einen ver-schobenen oder gekippten Paraboloiden an der Stelle ~r0.
In der Multipolentwicklung entwickeln wir nun f(~r ′) = 1|~r−~r ′| um ~r0
′ = 0. Dazuberechnen wir den Gradienten und die Hesse-Matrix der zweiten Ableitungen indiesem Punkt
~∇~r ′f(0) = − ~r ′ − ~r|~r ′ − ~r|
∣∣∣∣~r ′=0
=~r
r3(1.91a)
∂′i∂′jf = −∂′i
x′j − xj|~r ′ − ~r|3
= −∂′i(x
′j − xj)
|~r ′ − ~r|3− (x′j − xj)∂′i
1
|~r ′ − ~r|3
= −∂′i(x
′j − xj)
|~r ′ − ~r|3− (x′j − xj)
(−3)(x′i − xi)|~r ′ − ~r|5
(1.91b)
⇒ ∂′i∂′jf(0) = −δij
r3+ 3xixj
1
r5. (1.91c)
Das wird in der allgemeinen Taylorformel (1.90) benutzt. Beachte dabei, dass wir hierbezüglich ~r ′ und nicht bezüglich ~r entwickeln.Wir erhalten die Taylorentwicklungvon 1
|~r−~r ′| um ~r0′ = 0
1
|~r − ~r ′|≈ 1
r+~r
r3· ~r ′ + 1
2
∑i,j
x′ix′j
(−δijr3
+3xixjr5
).
70

Damit erhalten wir für das Potential (1.89)
Φ(~r) ≈ 1
4πε0
1
r
∫dr′ 3ρ(~r ′)︸ ︷︷ ︸
:= Monopol q
+1
4πε0
~r
r3·∫dr′ 3ρ(~r ′)~r ′︸ ︷︷ ︸
:= Dipol ~p
+1
4πε0
1
2
∑i,j
xixjr5
∫dr′ 3ρ(~r ′)(3x′ix
′j − δijr′2)︸ ︷︷ ︸
:= Quadrupoltensor Q
.
(1.92)
Die Multipolmomente q, ~p, Q der Ladungsverteilung sind alle Integrale über Funk-tionen von ~r ′ gewichtet mit der Ladungsdichte ρ(~r ′). Sie sind also Eigenschaf-ten der Ladungsverteilung. Getrennt davon erscheinen in (1.92) die zugehörigen~r-Abhängigkeiten der Fernfelder in den einzelnen Termen
Φ(~r) ≈ 1
4πε0
q
r︸︷︷︸∼ 1r
+~r · ~pr3︸︷︷︸∼ 1r2
+1
2
1
r5~r ᵀQ~r︸ ︷︷ ︸∼ 1r3
.
(1.93)
Wichtig ist folgende Eigenschaft: Die Multipolmomente sind zwar Eigenschaften derLadungsverteilung, sie hängen aber im Allgemeinen von der Wahl des Koordina-tenursprungs ~r ′ = 0 ab. Physikalisch relevant sind insbesondere die Größen, dienicht von der Wahl des Koordinatensystems abhängen. Dazu existiert das folgende
Theorem:
Das niedrigste nicht-verschwindende Moment hängt nicht von der Wahl desKoordinatenursprungs ab und charakterisiert daher nur die Ladungsvertei-lung an sich.
Wir beweisen dieses Theorem hier nicht, machen uns aber die Konsequenzen anverschiedenen Beispielen klar. Es ist
q 6= 0 ⇒ ~p,Q abhängig von Wahl des Ursprungsq = 0 ⇒ ~p unabhängig von Wahl des Ursprungs
Q abhängig von Wahl des Ursprungsq = 0, ~p = 0⇒ Q unabhängig von Wahl des Ursprungs.
Der Quadrupoltensor Q hat einige wichtige Eigenschaften, die seine Berechnungvereinfachen. Er ist
71

1. spurfrei, das heißt Sp Q =∑3
i=1 Qii = 0, was eine Bedingung an seine Matri-xelemente liefert,
2. symmetrisch Qij = Qji, was uns drei weitere Bedingungen gibt, so dass dieMatrix Q nur 3 · 3− 4 = 5 unabhängige Elemente besitzt, und
3. für kugelsymmetrische Ladungsverteilungen ρ(~r ′) = ρ(|~r ′|) ist Q = 0, dennaufgrund der Kugelsymmetrie folgt
(a) Q11 = Q22 = Q33(1.)⇒ Qii = 0
(b) Qij = 0 für alle i 6= j .
Beispiele:
1) Zunächst betrachten wir erneut den diskreten Dipol und Quadrupol aus demletzten Abschnitt 1.9.1 und verifizieren, dass die Definitionen 1.92 von Dipolmomentund Quadrupoltensor wieder übereinstimmen mit unseren Definitionen in 1.81 und1.87.
Für den diskreten Dipol aus 1.9.1 mit ρ(~r ′) = −qδ(~r ′) + qδ(~r ′ − ~a) bestehend auszwei Punktladungen gilt nach Definition (1.92)
~p =
∫dr′ 3q[δ(~r ′ − ~a)− δ(~r ′)]~r ′ = q~a,
wie bereits in (1.81) eingeführt.
Für den diskreten Quadrupol aus 1.9.1 mit ρ(~r ′) = (qδ(~r ′)−qδ(~r ′−~a))+(−qδ(~r ′−~d) + qδ(~r ′ − ~a− ~d)) bestehend aus vier Punktladungen gilt nach Definition (1.92)
Qij =
∫dr′ 3q[−δ(~r ′ − ~a) + δ(~r ′) + δ(~r ′ − ~a− ~d)− δ(~r ′ − ~d)](3x′ix
′j − δijr′2)
= q[(3(ai + di)(aj + dj)− δij(~a+ ~d)2)− (3aiaj − δija2)− (3didj − δijd2)]
= q(3aidj + 3diaj − 2δij~a · ~d),
was wegen der Symmetrie in der i- und j-Summation in (1.87) ebenfalls auf dengleichen Quadrupoltensor führt, der definiert wurde.
2) Homogen geladene Kugel, bei der die obere Halbkugel positiv, die untere negativgeladen ist. Offensichtlich verschwindet dann die Gesamtladung. Es gilt q = 0.
Es ist
ρ(r, ϑ, ϕ) =
ρ0 > 0, für ϑ < π
2,
−ρ0 < 0, für ϑ > π2,
72

Abbildung 1.54: Homogen aber entgegen gesetzt geladene Halbkugel
und es gilt
qHalb =2π
3ρ0R
3 ⇒ q = 0.
Nun berechnen wir das Dipolmoment in Kugelkoordinaten
~p =
∫K
dr′ 3ρ(~r ′)~r ′
=
∫R
0
dr
∫2π
0
dϕ
∫ π
2
0
dϑ ρ0r · r2 sinϑ
sinϑ cosϕsinϑ sinϕ
cosϑ
−−
∫π
π2
dϑ ρ0r · r2 sinϑ
sinϑ cosϕsinϑ sinϕ
cosϑ
Wegen der Rotationssymmetrie um ~ez ist das Dipolmoment ~ρ Null in der x- undy-Komponente. Mit
∫dϑ sinϑ cosϑ = 1
2sin2 ϑ folgt für die z-Komponente
~p = ~ez 2 · 2πR4
4ρ0 = ~ez
3
2qHalbR.
Die Kugel besitzt folglich ein Dipolmoment in z-Richtung, das proportional zurLadung jeder Halbkugel und dem Radius ist. Das Quadrupolmoment ist dann vonder Wahl des Koordinatensystems abhängig und wird deshalb hier nicht berechnet.
73

1.10 Der Kondensator
von condensare (lat.) = verdichten
• speichert elektrische Ladung• speichert Energie im elekrtischen Feld• zwei (oder mehr) leitende Objekte, in der Regel flächenartig mit geringem
Abstand, dazwischen Isolator• entgegengesetzt aufgeladen QA = Q, QB = −Q
1.10.1 Die Kapazität
Leiteroberflächen sind ÄquipotentialflächenPotentialdifferenz U (Spannung in V)U =
∫~E d~s
Q = C · U (1.94)
Proportionalitätskonstante C: Kapazität[C] = 1 C
V= 1 F Farad (1 Farad ist sehr groß, typsche Größen: µF, nF, pF)
Gauß’sche Einheiten: [C] = 1 cm=1,1 pF
74

1.10.2 Platten- und Kugelkondensator
PlattenkondensatorGauß’scher Satz
E = 1ε0
QA
Laplace-Gleichung in einer Dimension:
∂2
∂x2= 0
φ(x) = ax+ b
φ(0) = φA b = φa
φ(d) = φB = a · d+ φA a =φb − φa
d=U
d= E,
weil U =
∫~E d~s = E · d
E =U
d=
1
ε0
Q
A
Q = ε0A
d︸︷︷︸C=ε0
Ad
·U
Q = C · U (1.95)
• große Fläche, kleiner Abstand zumBeispiel Wickelkondensatoren
• variable Kapazität: Drehkondensa-tor
75

Kugelkondensator
1. r < a: kein Feld (vergleiche Faraday-Käfig)
2. a ≤ r ≤ b: Gauß’scher Satz∮~E d~a = Q
ε0= E · 4πr2
→ ~E = 14πε0
Qr2 ~er
radial und nach außen3. r > b: kein Feld
Gesamtladung 0φ = const. = 1
4πε0
Qb
Spannung zwischen Kugelflächen
U = φa − φb =Q
4πε0
(1
a− 1
b
)=
Q
4πε0
· b− aab
KapazitätC = Q
U= 4πε0
abb−a falls d = b− a klein: ab ≈ R2; A = 4πR2
C ≈ 4πε0R2
d= ε0
A
dvergleiche Plattenkondensator
b→∞ geladene Kugel mit Radius a:
C = 4πε0 · a (1.96)
76

1.10.3 Parallel- und Reihen-(Serien-) Schaltung von Kondensatoren
Schaltsymbole
Parallelschaltung
Fläche vergrößert C ∼ A
C =∑i
Ci
Spannung konstantLadungen addieren sich∑
i
Qi =∑i
Ci · U
C = C1 + C2
SerienschaltungAbstände vergrößert C ∼ 1
d
1
C=∑i
1
Ci
Ladung konstantSpannungen addieren sich∑
i
Ui = Q∑i
1
Ci
C =
(1
C1
+1
C2
)−1
=C1 · C2
C1 + C2
1.11 Energie des elektrischen Feldes
Ladungsportionen dQ auf geladene Kugel (Radius a) übertragen:
Arbeit dW = dQ (φa − φ∞) = dQ·φamit φ∞ = 0
φa =1
4πε0
· Qa
Gesamte Arbeit beim Aufladen von 0 auf Q:
W =1
4πε0
1
a
Q∫0
Q′ dQ′ =1
4πε0
1
a
Q′2
2
∣∣∣∣∣∣Q
0
=1
8πε0
1
aQ2 =
1
2
Q2
Cweil C = 4πε0 · a
Energie im Feld
W =1
2
Q2
C=
1
2CU2 (Q = C · U) (1.97)
77

gilt unabhängig von der Form des Kondensators
Zum Beispiel Plattenkondensator
W =1
2CU2 =
1
2ε0A
dE2d2 =
1
2ε0E
2 · V (Volumen V = A · d)
das heißt Energiedichte = Energie/Volumen
ωel =1
2ε0E
2
gilt ebenfalls allgemein
Beispiel: Defibrillator
C = 1000 µFU = 750 V∆ t = 2 ms
W =1
2C U2 =
1
2· 10−3 C
V· 7502 V 2 = 281 J
Leistung P =W
∆t= 140 kW
1.12 Dielektrika im elektrischen Feld
Dielektrika sind nichtleitende Substanzen
U =Q
C
CDiel = ε CV ak = ε ε0 ·A
d
ε > 1 relative Dielektrizitätskonstante oder Dielektrizitätszahl (dimensionslos)
78

Beispiele:Gläser ∼ 4Porzellan ∼ 6-7Keramiken ∼ 100-1000Wasser 81Benzol 2,3Luft 1,0006
1.12.1 Dielektrische Polaristation
C =Q
UCDiel = ε Cvak Dielektrizitätszahl
E =U
d=
1
εε0
Q0
A
E =1
4πεε0
Q0
r2zum Beispiel bei Punktladung
ExperimentIn einen geladenen Plattenkondensator wird ein Dielektrikum (Kunststoffplatte)
Abbildung 1.55: Dielektrikum bzw. Metallplatte in Kondensator
sowie eine Metallplatte gehalten.Beim Einführen der Gegenstände ist ein Absinken der Spannung zu beobachten.Das bedeutet ein Steigen der Kapazität. Beim Herausnehmen der Platten steigt dieSpannung auf ihren Anfangswert.
Erklärung: Bei der Metallplatte richten sich die freien Ladungen am angelegtenFeld aus und bilden ein entgegengesetzt wirkendes Polarisationsfeld. Im Inneren derMetallplatte hebt das Polarisationsfeld das elektrische Feld des Kondensators ganzauf.Bei der Kunststoffplatte richten sich induzierte Dipole des Isolators, ähnlich derInfluenz, am elektrischen Feld des Kondensators aus. Da sie jedoch nicht beweglichsind, ist die „Nettoladung“ an der Oberfläche des Isolators nicht so groß wie beider Metallplatte. Das Polarisationsfeld wirkt dem äußeren elektrischen Feld zwarentgegen und schwächt es, kann es aber nicht gänzlich aufheben.
79

Abbildung 1.56: links: Leiter im Kondensator, rechts: Isolator im Kondensator
zu Abbildung 1.56 links zu Abbildung 1.56 rechts
C = ε0A
d− bC = ε0
A
d− b ε−1ε
1
C=
1
C1
+1
C2
C1 = d− b; ε = 1
C2 = b; ε > 1
E =1
εε0
Q
Aoder E =
1
ε0
Qeff
A
vergleiche E0 =1
ε0
Q0
A
Qeff = Q0
ε: Unterschied durch Oberflächenladung Qp auf dem Dielektrikum auf-
grund von Polarisation(Dipolbildung). Die im Dielektrikum induzierten Dipole ha-ben ein Dipolmoment:Dipolmoment der Box (siehe Abbildung 1.57):
80

Abbildung 1.57: Dipolmoment der Box im Dielektrikum
dp = dQp · dl
= dA ε0E0ε− 1
εdl
= ε0E0ε− 1
εdV
Dipolmoment/Volumen
Polarisation ~P =ε− 1
εε0~E0
= (ε− 1)ε0~E
χ = (ε− 1)
oder = (ε− 1)ε0 Angabe von χ literaturabhängig
χP heißt dielektrische Suszeptibilitätε und χ sind makroskopische Konstanten
Die Feldlinien enden an den Ladungen Q0 an den Kondensatorplatten und Qp anden induzierten Ladungen des Dielektrikums. Es wird ein neues Feld definiert: De-finition:
~D = ε0~E + ~P
= ε ~E + (ε− 1)ε0~E
= εε0~E
= ε0~E0
(1.98)
Die „D-Feldlinien“ enden nur an den Ladungen Q0~D heißt dielektrische Verschiebungsdichte
[D] = [ε0][E]
= 1C2 m2
N
N
C
= 1C
m2
Beim Dielektrikum enden die Feldlinien nicht zwangsweise senkrecht auf der Ober-fläche. Es lassen sich für Feldlinien an Grenzflächen Brechungsgesetze bestimmen.
81

Treten die Feldlinien senkrecht zum Dielektrikum ein, so wird das elektrische Feld
Abbildung 1.58: links: Brechung des elektrischen Feldes, rechts: Brechung des D-Feldes an einer Grenzfläche
geschwächt (siehe Abbildung 1.56). Treten die Feldlinien unter einem Winkel α ein,wird ~E in die Komponenten E|| parallel zur Grenzfläche und E⊥ senkrecht zur Grenz-fläche zerlegt. Für den Übergang von E⊥ gilt:
E ′⊥ =1
εE⊥ (1.99)
Für den senkrechten Anteil E|| wird ein Rechteck entlang der Grenzfläche betrach-
Abbildung 1.59: „Wegintegral entlang der Grenzfläche“
tet(siehe Abbildung 1.59). Da im elektrischen Feld∮E ds = 0 gilt
E ′|| = E||. (1.100)
Das Brechungsgesetz für das elektrische Feld lautet
tan β = ε · tanα. (1.101)
Für das D-Feld folgt mit ~D = εε0~E direkt
D′⊥ =D⊥
D′|| =εD||.(1.102)
82

Abbildung 1.60: Verschiebung um x im elektrischen Feld
1.12.2 Molekulare Dipolmomente
• VerschiebungspolarisationDurch den Einfluss eines elektrischen Feldes wird der Atomkern um die Streckex ausgelenkt. Im Normalfall wird ein Atomkern maximal um seinen eigenenDurchmesser (∼ 10−15 m) ausgelenkt, sodass negativer und positiver Ladungs-schwerpunkt nicht mehr übereinstimmen. Die Atome haben ein induziertesDipolmoment. Es gilt mit p = Q · x, x = QE
kund dem Hook’schen Gesetz
F = k · x
=Q2
k︸︷︷︸α
E.
Daraus folgt die Polarisierbarkeit α = Q2
k.
Für die Polarisation ~P gilt
~P = n · ~p (1.103)
= nα~E
= (ε− 1)ε0~E
= χε0~E.
Beachte dabei(ε− 1)ε0︸ ︷︷ ︸
makroskopisch
= n · α︸︷︷︸mikroskopisch
.
• OrientierungspolarisationBei Molekülen deren Ladungsschwerpunkte permanent voneinander verschie-den sind, spricht man von polaren Molekülen. Sie haben ein permanentes Di-polmoment. Ohne ein elektrisches Feld ist ihre Orientierung ungeordnet, dieRichtungen der Dipolmomente sind in alle Raumrichtungen gleichermaßen ver-teilt.Das Anlegen eines elektrischen Feldes orientiert die Dipole, die thermische Be-wegung wirkt der Ausrichtung entgegen. Die Orientierung wird umso größer,je niedriger die Temperatur ist.Bei hochfrequenten elektrischen Feldern reicht die Zeit nicht aus, um die per-manenten Dipole ständig neu auszurichten. Die Orientierungpolarisation findet
83

nur mit einer Verzögerung statt (dielektrische Verluste). Die Verschiebungspo-larisation hingegen findet auch in hochfrequenten elektrischen Feldern statt.
Abbildung 1.61: Wasser (H2O) als Beispiel für permanenten Dipol
1.12.3 Elektrische Feldenergie im Dielektrikum
Für die elektrische Feldenergie gilt:
Wel =1
2C U2 =
1
2ε0E
2 V
Bei gleicher Spannung und einem Dielektrikum (ε > 1) im Kondensator erhöht sichaufgrund der erhöhten Kapazität die Feldenergie um den Faktor ε
Wel =1
2εε0E
2 V. (1.104)
Damit gilt die die Energiedichte ωel = Wel
V
ωel = εε0
2E2
=1
2ED.
(1.105)
Die Erhöhung der Energiedichte lässt sich mit Blick auf die Verschiebungspolarisa-tion erklären.Um die Verschiebung x eines Atomkerns zu erreichen muss die Energie
Wpol =
∫ x
0
F dx =1
2kx2
wobei k =Q · Ex
⇒ Wpol =1
2Q · E · x =
1
2p · E
zusätzlich aufgewendet werden (vergleiche gespannte Feder). Damit ergibt sich eineEnergiedichte von ωpol = 1
2P · E = 1
2ε0(ε − 1)E2 die zusätzlich zu ωel = 1
2ε0E
2
aufgewendet werden muss.Experiment: Dielektrische Flüssigkeit steigt in einem Kondensator
84

Abbildung 1.62: Dielektrische Flüssigkeit steigt in einem Kondensator
1. Isolierter Kondensator/Ladung konstant:
W = 12· E ·D · V → 1
2
E
εD · V
elektrische Energie︸ ︷︷ ︸Feld verringert
→ mechanische Energie︸ ︷︷ ︸Heben der Fluessigkeit
2. Spannung konstant
W = 12E · ε0 · E︸ ︷︷ ︸
D
·V → 1
2E εε0 · E︸ ︷︷ ︸
D
·V
elektrische Energie (aus dem Netzgerät) W = ∆Q · U wird umgewandelt in(1) elektrische Energie W = 1
2∆Q · U und in (2) mechanische Energie (Heben
der Flüssigkeit).Die Berechnung der Steighöhe geht über das Kräftegleichgewicht:
m · g +d
dh(1
2C · U2) =
d
dh(Q · U) mit dQ = U · dC
Kraft auf Dielektrikum im inhomogenen elektrischen Feld:
F = pdE0
dzwobei Dipolmoment p = P · V
Polarisation P =ε− 1
εε0 · E0
Experiment: Glaskugel im elektrischen Feld (siehe Abbildung 1.63)Auf die Glaskugel wirkt eine Kraft in Richtung der größeren Feldstärke!
Experiment: Blasen in dielektrischer Flüssigkeit (siehe Abbildung 1.64, Abbildung1.65, Abbildung 1.66)Auf die Blasen wirkt eine Kraft in Richtung der kleineren Feldstärke!
85

Abbildung 1.63: Experiment mitGlaskugel im elektrischen Feld
Abbildung 1.64: Experiment mit Bla-sen in dielektrischer Flüssigkeit
Abbildung 1.65: Experiment mit Bla-sen in dielektrischer Flüssigkeit
Abbildung 1.66: Experiment mit Bla-sen in dielektrischer Flüssigkeit
1.13 Polarisierbarkeit und Polarisation: Clausius-Mosotti-Formel
Wir betrachten eine Kugel eines neutralen Dielektrikums in einem externen elek-trischen Feld ~Eext. Später werden wir diese Kugel so klein wählen, dass sie einemMolekül oder Atom entspricht. Das elektrische Feld zieht die als homogen angenom-menen negative und positive Ladungsverteilung um den Abstand ~d auseinander. Dasentstehende Potential im Inneren lautet nach Formel (1.52)
ΦPol(~r) = − Q
8πε0R3
(~r − ~d
2
)2
−
(~r +
~d
2
)2 ,
wobei die konstanten Terme sich gegenseitig aufheben. Wir nehmen |~d| R an, sodass wir für |~r| < R im Inneren beider Kugeln bleiben.
Also istΦPol(~r) =
Q
4πε0R3~d · ~r.
Hierbei ist ~p := Q~d das Dipolmoment. Interessanterweise ist das resultierende elek-trische Feld
~EPol(~r) = −~∇ΦPol = − ~p
4πε0R3
homogen und dem Dipolmoment entgegengerichtet.
Das elektrische Feld ~Eext induziert eine Polarisation ~p gemäß ~p = α~Eext, wobei αdie atomare Polarisierbarkeit ist. Wenn wir uns die Kugel aus einem homogen
86

polarisierten Dielektrikum ausgeschnitten denken, gilt für die Polarisation
~P := n~p
mit n der Dichte der Dipole. Unsere Kugel entspricht einem solchen Dipol und hatdas Volumen 4π
3R3, folglich gilt
~P =~p
4π3R3
=3~p
4πR3
und so~EPol(~r) = − 1
3ε0
~P .
Betrachten wir nun ein Dielektrikum im elektrischen Feld ~Eext, so ist das mittlereFeld im Inneren ~Eint nicht ~Eext, sondern um ~EPol vermindert. Dann gilt
~Eint = ~Eext + ~EPol = ~Eext −1
3ε0
~P
mit ~P = nα~Eext, also~Eint =
(1− nα
3ε0
)~Eext.
Auf der makroskopischen Ebene hatten wir aber definiert
~P = χε0~Eint
= χε0
(1− nα
3ε0
)~Eext
= nα~Eext
Also folgt die Clausius-Mossotti-Gleichung
χ =nαε0
1− nα3ε0
(1.106)
und mit ε− 1 = χ⇔ ε = 1 + χ, siehe 1.103, erhalten wir
ε =1 + 2
3nαε0
1− nα3ε0
. (1.107)
Häufig wird die letzte Beziehung auch umgestellt und nach α aufgelöst. Dann erhal-ten wir
α =3ε0
n
ε− 1
ε+ 2. (1.108)
87

Es war früh erkannt worden, dass der rechte Ausdruck unabhängig von der Dichteder Moleküle ist. Das lässt sich mit der obigen Theorie nachvollziehen, da χ diePolarisierbarkeit einzelner Moleküle ist und somit nicht von n abhängt. Also mussdie rechte Seite von n unabhängig sein.
Der zweite spannende Aspekt von 1.106 ist, dass für nα3ε0→ 1 wir mit immer kleine-
rem internen elektrischen Feld eine Polarisation haben können. So kann es zu Elek-treten kommen, auch Ferroelektrika genannt, die ohne inneres elektrisches Feldeine Polarisation aufweisen, die außerhalb ein endliches elektrisches Feld zur Folgehat. Sie brechen ihre innere Symmetrie und gehen in eine andere, ferroelektrischePhase über. Wir merken uns für die Zukunft, dass divergierende SuszeptibilitätenPhasenübergänge signalisieren.
88

2 Elektrischer Strom
2.1 Ladungstransport
Der Strom beschreibt den Transport elektrischer Ladungen in einem Leiter. Somitdefinieren wir die Stärke des Stroms wie folgt
Stromstärke = Ladung/Zeiteinheit
I =dQ
dt;
[I] = 1C
s= 1 A (Ampere).
1 Ampere ist die Basiseinheit im SI-System. Das Ampere geht auf den Physiker undMathematiker André Marie Ampère (1775-1836) zurück, der die Kräfte in einemstromdurchflossenen Leiter entdeckte.
Zur Zeit lautet die Definition des Amperes:Stärke eines Stroms durch zwei parallele Leiter in einem Meter Abstand, die eineKraft von 2 · 10−7 N pro Meter bewirkt.
StromdichteAls Stromdichte j wird der Strom definiert, der durch eine Querschnittsflächen-einheit senkrecht zu der Fläche (parallel zum Normalenvektor der Fläche) fließt.
j = Strom/Flächeneinheit
I =
∫A
~j · d ~A (Querschnittsfläche);
I =
∮A
~j · d ~A (geschlossene Fläche);
I = −dQdt
= − d
dt
∫V
%el dV . (2.1)
Mithilfe des Gaußschen Satzes erhalten wir
∮A
~j · d ~A =
∫V
div~j dV ;
div~j(~r, t) = − ∂
∂t%el (~r, t). (2.2)
2.2 heißt Kontinuitätsgleichung, sie sagt aus, dass Ladungen weder erzeugt, nochvernichtet werden können.
89

Negative Änderung der eingeschlossenen Ladung = Strom durch die Oberfläche (Er-haltung der Ladung)
Transport von Ladung kann erfolgen durch
• bewegliche Elektronen in Metallen und Halbleitern;• bewegliche Ionen in Elektrolyten (z.B. Salzlösungen, Säuren, Basen);• Gemischte Leiter (Elektronen+Ionen) bei Gasentladung;• freie Elektronen, Ionen und andere Teilchen (z.B. Myonen).
Beispiel: DELTA
I = 130 mA =Q
T
gespeicherte LadungUmlaufzeit
wobei T =Umfang
c0
=115,2 m
3 · 108 ms
= 384 ns
⇒ Q = I · T = 0,13C
s· 3,84 · 10−7 s = 5 · 10−8 C
Elektronenzahl =Q
e=
5 · 10−8 C
1,6 · 10−19 C= 3,1 · 1011 e−
Beispiel: Stromfluß in Leitern
„technische Stromrichtung“ von + nach −
Abbildung 2.1: Technische/physikalische Stromrichtung
90

Abbildung 2.2: Stromdurchflossener Leiter
Gegeben: A = 1 mm2; n = 1029 e−
m3 bei circa 1 Elektron pro Atom
I = 1 A = 1C
s=n · e · A · L
L· v
v =I
n · e · A
=1 C
sm3
1029 · 1,6 · 10−19 C · 10−6 m2
= 0,6 · 10−4 m
sDriftgeschwindigkeit
zum Vergleich: ∼ 106 m
smittlere Geschwindigkeit
2.2 Ohmsches Gesetz
~j = σel · ~E
σel : elektrische Leitfähigkeit[σel] = 1 A m
m2 V= 1
V mA
= 1Ω m
Für einen Leiter mit Querschnitt A und Länge L gilt
I =
∫~j · d ~A = jA;
U =
∫~E · d~L = EL;
⇒ I = σel · E · A =σel · AL︸ ︷︷ ︸1R
· U.
Elektrischer Widerstand
R =L
σel · A= %S
L
A
[R] =[U ]
[I]= 1
V
A= 1 Ω (Ohm)
%S : Spezifischer Widerstand = 1σel
91

2.3 Temperaturabhängigkeit des Widerstands
%S(T ) = %0
(1 + αT + βT 2 +O
(T 3))
(2.3)
%S(T ) ≈ %0
(1 + α
(T)· T)
(2.4)
Beispiele:Kupfer : α = 4 · 10−3 1
K
Konstantan (Legierung aus Ni,Cu,Zn) : α < 10−4 1K
Bei zunehmender Temperatur steigt die mittlere thermische Geschwindigkeit derElektronen. Zudem sinkt die freie Weglänge der Elektronen, da mehr Gitterschwin-gungen thermisch angeregt werden. Die freie Weglänge, ebenso wie die elektrischeLeitfähigkeit % hängt von Verunreinungen des Festkörpers ab, da mehr Fremdatomean den Gittern sitzen. Somit lässt sich der spezifische Widerstand zusammensetzenaus dem Grad der Verunreinung (Abbildung 2.3) und den Stößen der freien Elektro-nen mit den Gittern. Daher nimmt der elektrische Strom bei Temperaturerhöhungab und folglich der Widerstand zu.In Gleichung (2.3) ist die Temperaturabhängigkeit in ein weitem Temperaturbereichfestgehalten, selbst wenn der Korrekturterm O (T 3) nicht berücksichtigt wird. Füreine Näherung dient die Gleichung (2.4) in einem beschränkten TemperaturintervallI = [T1;T2] mit T als Mittelwert dieser Grenzen.
In Abbildung 2.4 erkennen wir bestimmte Sprungtemperaturen, in denen die Wider-stände schlagartig auf Null fallen. Dieses Phänomen wird Supraleitung genannt.Erstmals wurde dieses Phänomen durch H. Kamerlingh Onnes im Jahre 1911 ent-deckt. Später entdeckten Müller und Bednorz im Jahre 1986 Oxidkeramiken mitSprungtemperaturen oberhalb von 80 K. Erst 40 Jahre später wurde die Theoriedahinter aufgestellt. Die sogenannte BCS-Theorie (Bardeen, Cooper und Schriefer)besagt, das Leitungselektronen durch Wechselwirkung mit Gitter zu Paaren werden,genauer Cooper-Paaren.
Abbildung 2.3: Temperaturabhängigkeit des relativen spezifischen Widerstandes,hier bei Natrium
92

Abbildung 2.4: Verlauf des spezifischen Widerstands von Supraleitern mit verschie-denen Temperatursprüngen
2.4 Netzwerke
Schaltsymbole
Abbildung 2.5: Widerstand Abbildung 2.6: Widerstand (USA)
Abbildung 2.7: veränderlicher WiderstandAbbildung 2.8: veränderlicher Widerstand
Abbildung 2.9: Potentiometer Abbildung 2.10: Potentiometer
2.4.1 Kirchhoffsche Regeln
1. Kirchhoffsche Regel:
93

Abbildung 2.11: Knoten
N∑k=1
Ik = 0
− ∂
∂t
∫V
%eldV =
∫V
div~j dV =
∫A
~j · d ~A =∑k=1
Ik = 0
2.Kirchhoffsche Regel:
N∑k=0
Uk = 0
Abbildung 2.12: Masche
∮~E · d~s = 0
94

2.4.2 Beispiele für Schaltungen von Widerständen
• Reihenschaltung
R =∑k
Rk;
U0 =∑k
Uk = I ·∑k
Rk = I ·R.
• Parallelschaltung
1
R=
∑k
1
Rk
;
U
R= I =
∑k
Ik = U∑k
1
Rk
.
Abbildung 2.13: Widerstandswürfel
WiderstandswürfelSymmetrie:
Symmetrie⇒ IAB = IAC = IAE = IGH = IDH = IFH =: I1
Knotenregel⇒ I1 =I
3
ICG = ICD =I
6
⇒ U = R
(I
3+I
6+I
3
)= R
5
6︸︷︷︸RGesamt
· I
95
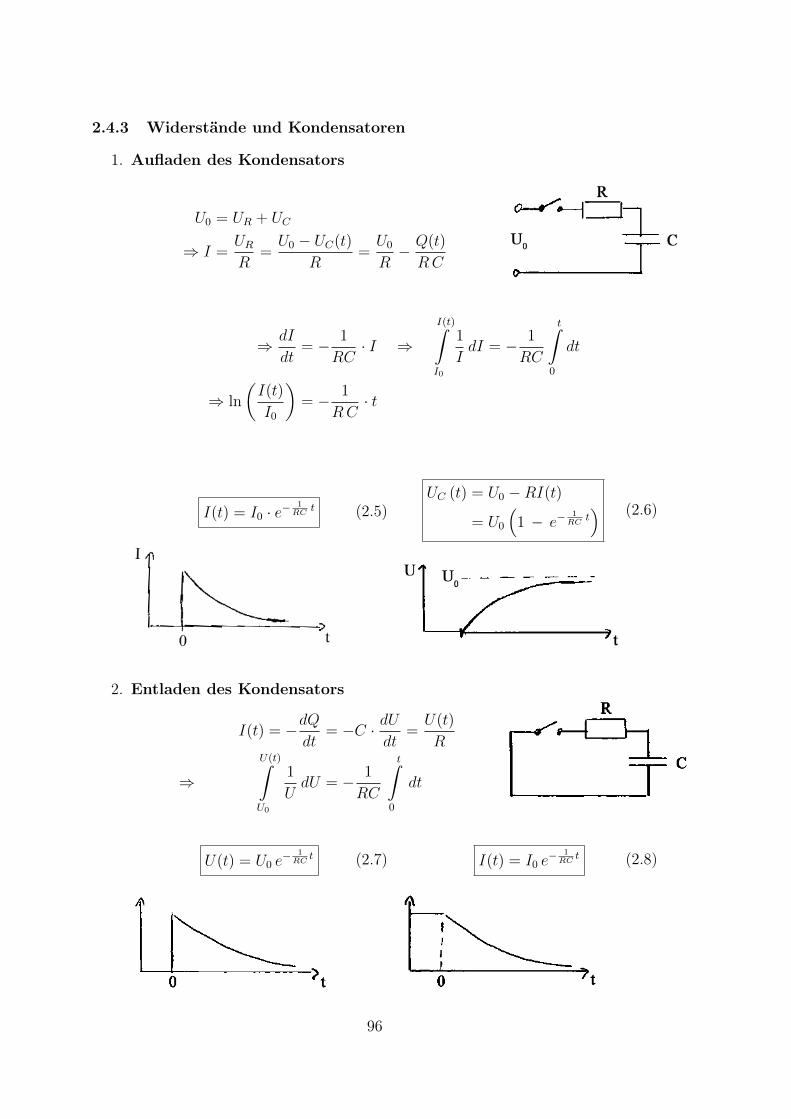
2.4.3 Widerstände und Kondensatoren
1. Aufladen des Kondensators
U0 = UR + UC
⇒ I =URR
=U0 − UC(t)
R=U0
R− Q(t)
RC
⇒ dI
dt= − 1
RC· I ⇒
I(t)∫I0
1
IdI = − 1
RC
t∫0
dt
⇒ ln
(I(t)
I0
)= − 1
RC· t
I(t) = I0 · e−1RC
t (2.5)UC (t) = U0 −RI(t)
= U0
(1 − e−
1RC
t) (2.6)
2. Entladen des Kondensators
I(t) = −dQdt
= −C · dUdt
=U(t)
R
⇒U(t)∫U0
1
UdU = − 1
RC
t∫0
dt
U(t) = U0 e− 1RC
t (2.7) I(t) = I0 e− 1RC
t (2.8)
96

2.5 Strom-Spannungs-Kennlinien
zum Beispiel Hysterese bei Glühlampen,R temperaturabhängig
97

2.6 Energie und Leistung beim Stromfluss
Arbeit bei der Bewegung einer Ladung Q von Potential Φ1 nach Φ2 (Differenz U :=Φ1 − Φ2)
W = Q · U ;
Leistung P =dW
dt= U
dQ
dt= UI =
U2
R= RI2, [P ] = 1 W (Watt);
Arbeit W =
t2∫t1
UI dt = UI∆t, wenn U, I konstant , [W ] = 1 W s = 1 J.
Eine ebenfalls gebräuchliche Einheit für elektrische Arbeit ist 1 kW h.
Abbildung aus D. Giancoli, Physik (Pearson)
2.7 Messen von Strom und Spannung
Strommessung kann erfolgen durch
• Wärmewirkung (Hitzedrahtamperemeter);• magnetische Wirkung (Drehspulamperemeter);• elektrolytische Wirkung (abgeschiedene Stoffmenge).
Strom
98

I =U
RM
; RM =
(1
R+
1
Ri
)−1
(2.9)
Spannung
U = RM · I; RM = R +Ri (2.10)
2.8 Stromquellen
• galvanische Elemente• thermische Stromquellen
Bei Innenwiderstand Ri und äußerem Widerstand Ra gilt
U = U0 −Ri · I = U0 −RiU0
Ri +Ra
= U0Ra
Ri +Ra
. (2.11)
U0 = Spannung der unbelasteten Stromquelle = EMK (elektromotorische Kraft)
2.8.1 Galvanische Elemente
• Primärelemente(heute: Batterien)verbrauchen sich;
• Sekundärelemente(heute: Akkumulatoren)sind regenerierbar.
99

Galvanische Elemente oder auch elektrochemische Zellen sind Anordnungen aus 2Elektroden in einem Elektrolyten (in der Regel eine Flüssigkeit, die durch Ionen-transport leitet, zum Beispiel Salzlösungen, Säuren, Basen), bei denen eine Spannungzwischen den Elektroden entsteht. Primärelemente sind solche, bei denen sich diebeteiligten Substanzen bei Stromentnahme verbrauchen und die nicht regenerierbarsind. Bei Sekundärelementen werden durch Stromfluss chemischer Reaktionen er-zwungen, die eine Spannung aufbauen (in ihrer Frühzeit wurden Sekundärelementemit Hilfe von Primärelementen aufgeladen - daher der Name). Sekundärelementeheißen heute Akkumulatoren. Sie sind oftmals, aber nicht beliebig oft regenerierbar.Primärelemente heißen heute Batterien. Dieser Begriff bezog sich früher auf einenVerbund mehrerer Zellen, analog zu einem Verbund von Geschützen (vergleiche fran-zösisch battre = hauen, prügeln, dreschen, raufen et cetera).
Der Grundgedanke bei der galvanischen Zelle ist, dass ein in einen Elektrolytengetauchtes Metall in begrenztem Maße positive Ionen abgibt und durch die ver-bleibenden Elektronen negativ wird. An der Grenzfläche entsteht ein elektrischesPotenzial, das einen für das Metall charakteristischen Wert hat. Wird ein anderesMetall in einen Elektrolyten getaucht, so entsteht ein Potenzial mit einem anderenWert. Werden die beiden Metalle elektrisch leitend verbunden, so bewirkt die Poten-zialdifferenz zwischen beiden einen Stromfluss. In welche Richtung der Strom fließt,hängt von den jeweiligen Potenzialen ab. Beispiel:
Elektronen fließen von einer Zinkelektrode zu einer Kupferelektrode, wenn beide ineine Kupfersulfatlösung getaucht sind. Der Stromfluss ist entgegen der Elektronen-richtung definiert, also von Kupfer (dem "Pluspol") zu Zink (dem "Minuspol"). Jedesgelöste Zinkatom hat 2 Elektronen abgegeben und bleibt in der Lösung. Ein gelöstesKupferatom, das 2 Elektronen aufnimmt, wird elektrisch neutral und scheidet sichan der Kupferelektrode ab. Die Zinkelektrode verbraucht sich, die Kupferelektrodewird dicker. Man sagt, Kupfer sei „edler“ als Zink (edel sein hat offenbar etwas mitDickwerden zu tun). Elektronenabgabe heißt auch Oxidation, Elektronenaufnahmeauch Reduktion. Beides zusammen heißt Redoxreaktion.
• Warum wird nur die „unedlere“ Elektrode verbraucht?Die „edleren“ Metallionen werden durch die negative Ladung der Elektronenangezogen und rekombinieren mit diesen zu neutralen Atomen, die sich andder Elektrode abscheiden. Die anderen Metallionen gehen jedoch in Lösung,wenn sie Elektronen abgeben.
• Können die Elektrolyte der beiden Elektroden voneinander völlig getrenntsein?Nein, denn sonst wird die Umgebung des Zink positiv, die des Kupfer negativaufgeladen, was dem Stromfluss entgegenwirkt. Damit die Anionen (zum Bei-spiel SO 2–
4 ) der Elektrolyte die Ladung ausgleichen können, müssen sie durcheine Membran oder eine „Salzbrücke“ von der Umgebung einer Elektrode zuranderen wandern können, während die Metallionen zurückgehalten werden.
• Müssen die Elektrolyte der beiden Elektroden durch eine Membran getrenntsein?
100

Nicht unbedingt. Das in der Vorlesung gezeigte Element funktionierte ohneMembran, eine Trockenbatterie hat auch keine. Die Frage ist, wie lange eszum Beispiel bei Cu und Zn in einem gemeinsamen Elektrolyten dauert, bissich Zn an der Cu-Elektrode abscheidet und der Stromfluss geringer wird.Die chemischen Reaktionen an den Elektroden sind zwar im Prinzip reversibel,aber es gibt viele Prozesse und Nebenreaktionen, die zur Alterung führen, zumBeispiel verändert sich im Laufe der Zeit die Bleisulfatschicht im entladenenZustand. Die Kristalle neigen dazu, größer zu werden, die Gesamtoberflächenimmt dadurch ab und mit ihr die Kapazität des Akkumulators („Kapazität“ist hier nicht C = Q
U, sondern Q in Amperestunden). Ferner korrodieren die
Bleielektroden, Teile fallen herab (Verschlammung) und können Kurzschlüssezwischen den Elektroden verursachen.
• Warum ist destilliertes Wasser kein guter Leiter, obwohl es doch H3O+ undOH-Ionen gibt?Die sogenannte Autoprotolyse 2H2O H3O
+ + OH– des Wassers bewirktnur eine geringe Leitfähigkeit des Wassers, weil das Gleichgewicht sehr starkzum H2O verschoben ist (nur 10−7 mol OH-Ionen pro Liter).
2.8.2 Brennstoffzelle
Reaktionsprodukte in Elektrolyten begrenzen die Speicherfähigkeit von Akkumula-toren, zum Beispiel
PbSO4 + H2O;
Pb + H2SO4.
2H2 + O2 2H2O + 5 eV
räumlich getrennte Teilreaktionen
O2 + 2H2O + 4 e– 4OH–
2H2 + 4OH– 4H2O + 4 e–
Leistungsdichten
0,2 kWkg
erreichbar; dies ist viel mehr alsbei einem Akkumulator.
101

2.8.3 Thermische Stromquellen
Versuch:
Ein Thermoelement wird an einem Ende abgekühlt und an dem anderen Ende miteinem Bunsenbrenner erhitzt. Dann ist ein Strom messbar, der dadurch zu erkennenist, dass die Schleife als Elektromagnet wirkt und in der Lage ist, das Gewicht von5 kg festzuhalten. (Näheres siehe Demtröder Abschnitt 2.9.3)
Zwei Metalle mit verschiedener Austrittsarbeit
Kontaktspannung, kein StromKontaktspannung ist temperaturabhängig
Die Behauptung, dass die Thermospannung die Differenz der temperaturabhängigenKontaktspannungen sei, stimmt nicht!3 Effekte tragen zur Stromdichte bei
~j Diffusion = −D · ~∇n;
~j thermische Diffusion = −λ3
∂v
∂T· n · ~∇T ;
~j Drift = −σ ~E.
(2.12)
102

3 Magnetostatik
Der Begriff „Magnet“ geht auf die Stadt Magnesia in Kleinasien zurück (lithosmagnes = Stein aus Magnesia), wo das Mineral Magnetit (Fe3O4) im alten Grie-chenland entdeckt wurde. Dieses Mineral zeigt magnetische Eigenschaften, das heißtes richtet sich im Erdmagnetfeld in Nord-Süd-Richtung aus. Diese Kompasseigen-schaft magnetischer Materialien war bereits in Griechenland und in China seit demAltertum bekannt.
Abbildung 3.1: Links: Magnetit, Rechts: Magnetische Feldlinien um einen perma-nenten magnetischen Dipol durch Eisenspäne sichtbar gemacht. (Quelle: Wikipedia).
Etwas genauer sind solche „magnetischen Materialien“ permanente magnetische Di-pole. Das Drehmoment auf einen solchen magnetischen Dipol ~m in einem Magnetfeld~B ist
~M = ~m× ~B. (3.1)
Mit einem „Magnet-Normal“ erlaubt die Messung des Drehmomentes (3.1) damit dieDefinition und Messung der magnetischen Flussdichte ~B. Obwohl dieser Zugangzur Magnetostatik über Permanentmagnete der Anschauung erst einmal entgegen-kommt, ist er problematisch, da die mikroskopische Erklärung des Permanentmagne-ten anspruchsvoll ist. Sie involviert Elemente der Quantenmechanik (Spins und ihreAustauschwechselwirkung) und der statistischen Physik, da viele wechselwirkendeSpins vorliegen, und wird im Rahmen der Festkörperphysik ausführlich behandeltwerden. Wir werden daher hier einen Zugang ausgehend von Strömen wählen.
Die Gesetze der Magnetostatik sind im allgemeinen weniger intuitiv als die derElektrostatik. Der Hauptgrund dafür ist
Es gibt keine freien magnetischen „Ladungen“ (magnetischen Monopole). (3.2)
Das bedeutet zum Beispiel, dass der magnetische Nord- und Südpol nicht getrenntwerden können, etwa durch Teilen eines Permanentmagneten. Daher sind magne-tische Dipole (oder magnetische Momente) ~m die elementaren Einheiten in derMagnetostatik.
103

Auf Grund dieser Probleme in der Magnetostatik blieb auch der enge Zusammen-hang zwischen elektrischen und magnetischen Phänomenen lange verborgen. Erstim 19. Jahrhundert wird von Oersted, Faraday und Maxwell dieser Zusammenhangentdeckt, der die Basis der heutigen Theorie des Elektromagnetismus darstellt.
3.1 Ampèresches Kraftgesetz
Einen engen Zusammenhang gibt es zwischen Strömen und Magnetfeldern. Es hatsich herausgestellt:
Ströme wechselwirken mit magnetischen Dipolen und anderen Strömen.
Dies zeigte sich insbesondere in zwei grundlegenden Experimenten.
Der dänische Physiker Oersted fand 1819, dass Kompassnadeln in der Nähe strom-führender Drähte eine Kraft erfahren, das heißt, dass ein stromführender Draht einenMagneten auslenkt, siehe Abbildung 3.2.
Abbildung 3.2: Oersted-Experiment. Oben: Kompassnadeln richten sich um einenstromführenden Draht kreisförmig aus. Unten: Eisenspäne richten sich um einenstromführenden Draht kreisförmig aus.
Biot und Savart im Jahr 1820 und etwas später Ampère in den Jahren 1820-25,stellten Kräfte zwischen Paaren von stromführenden Drähten fest. Auch diese Kräftesind magnetischer Natur.
Erinnerung: In diesem Zusammenhang sei daran erinnert, dass die Definition derStromeinheit Ampère (1A) genau auf diesem Effekt beruht.
104

Abbildung 3.3: Biot-Savart-Experiment. Kräfte zwischen stromdurchflossenenDrähten führen zu Anziehung bei gleichen Stromrichtungen und Abstoßung bei ent-gegengesetzten Stromrichtungen.
Abbildung 3.4: 2 lange Drähte im Abstand von 1 Meter und einer Stromstärke von1 A in beiden Drähten der Länge L bewirken eine anziehende Kraft
F =L
1 m· 2 · 10−7 N,
also 2 · 10−7 N pro Meter.
Die Ergebnisse der Experimente von Biot, Savart und Ampère lassen sich im Am-pèreschen (Kraft-)Gesetz zusammenfassen. Das Ampèresche Gesetz gibt dieKraft zwischen zwei ruhenden Stromschleifen, geschlossenen „Stromfäden“, im Va-kuum an, siehe Abbildung 3.5.
Quantitativ ist die Kraft von Schleife 2 auf Schleife 1 gegeben durch
~FA,12 =µ0
4πI1 I2
∮Γ1
∮Γ2
d~l1 ×(d~l2 × (~r1 − ~r2)
)|~r1 − ~r2|3
(3.3)
105

Abbildung 3.5: Kraft zwischen Schleife 1 und Schleife 2.
mit
µ0 := 4π · 10−7 N
A2 , der magnetischen Permeabilitätskonstante. (3.4)
Abbildung 3.6: Stromfaden = Strom I entlang des Weges Γ. Linienelement d~l desWeges impliziert das Stromelement I d~l.
Eigenschaften der Ampèreschen Kraft ~FA,12:
(i) Kraft wirkt zwischen Paaren von Stromschleifen,(ii) ist proportional zum Strom beider Schleifen.(iii) Parallele Ströme ziehen sich an.
Mit ~r12 := ~r1 − ~r2 folgt
d~l2 × ~r12 zeigt aus der Zeichenebene nach vorne;
d~l1 ×(d~l2 × ~r12
)zeigt von d~l1 nach d~l2,
also ist die Kraft anziehend.
Oder
d~l1 ×(d~l2 × ~r12
)= d~l2
(d~l1 · ~r12
)︸ ︷︷ ︸
=0
−~r12
(d~l1 · d~l2
)︸ ︷︷ ︸zeigt von d~l1 nach d~l2
,
106

Abbildung 3.7: Kräfte zwischen parallelen Stromfäden.
wofür wir die Graßmann-Identität („bac-cab Regel“) verwendet haben
~a×(~b× ~c
)= ~b (~a · ~c )− ~c
(~a ·~b
).
(iv) In der Form (3.3) erscheint das Ampèresche Kraftgesetz unsymmetrisch be-züglich Stromschleifen 1 und 2 und es ist nicht unmittelbar klar, ob actio =reactio gilt. Daher benutzen wir die Graßmann-Identität auch, um das Kraft-gesetz umzuschreiben. Im Integranden erhalten wir
d~l1 ×(d~l2 ×
~r12
|~r12|3
)= d~l2
(d~l1 ·
~r12
|~r12|3
)︸ ︷︷ ︸
=−d~l1·~∇11|~r12|
−(d~l1 · d~l2
) ~r12
|~r12|3.
Der erste Summand ergibt also ein geschlossenes Wegintegral über einen Gra-dienten und daher ein verschwindendes Integral:
∮Γ1
d~l1 · ~∇11|~r12| = 0. Es bleibt
~FA,12 = −µ0
4πI1I2
∮ ∮ (d~l1 · d~l2
) ~r12
|~r12|3. (3.5)
In dieser Form können wir sofort ablesen, dass ~FA,12 = −~FA,21 gilt, also in derTat actio = reactio gültig ist.
(v) Der Betrag ist proportional zu |~r1 − ~r2|−2.(vi) Superpositionsgesetz (siehe Newtonsche Axiome). Die Kräfte von weiteren
Stromschleifen 3 usw. addieren sich zur Gesamtkraft ~FA,1 = ~FA,12 + ~FA,13 + · · ·auf Schleife 1.
Einheiten im Ampèreschen Kraftgesetz:
Die Eigenschaften (i)-(vi) werden allgemein von jedem Kraftgesetz
~FA,12 = k I1I2
∮ ∮ d~l1 ×(d~l2 × ~r12
)|~r12|3
107

mit einem prinzipiell frei wählbaren k erfüllt. Einen ähnlichen Proportionalitätsfak-tor k hatten wir in 1.5.1 bei der Coulombkraft eingeführt.
Im SI-System wurde festgelegt: k = µ0
4πmit µ0 = 4π · 10−7 N
A2
Im Gauß-System wurde dagegen festgelegt: k = 1c2. Warum taucht hier plötzlich
ein Faktor c = Lichtgeschwindigkeit auf?
Ein ähnlicher Faktor taucht tatsächlich auch im SI-System auf. Dort berechnet manmit 1
4πε0= 8,99 · 109 N m2
A2 s2 für das Verhältnis der Proportionalitätsfaktoren k und kaus Coulomb- und Ampèregesetz
k
k=
1
ε0µ0
= 107 · 8,99 · 109 m2
s2 = c2. (3.6)
Damit sind die Proportionalitätsfaktoren k aus dem Coulombgesetz und k aus demAmpèregesetz nicht unabhängig frei wählbar, sondern (3.6) muss offensichtlich er-füllt sein. Die Beziehung c2 = 1/(ε0µ0), die den Zusammenhang mit der Lichtge-schwindigkeit herstellt, wird erst später im Kapitel über elektromagnetische Wellenhergeleitet werden. In den beiden am meisten gebräuchlichen Einheitensystemen giltalso
SI: k =µ0
4πk =
1
4πε0
1
ε0µ0
= c2;
Gauß: k =1
c2k = 1.
Das Ampère-Gesetz 3.3 hat eine große Ähnlichkeit mit dem Coulombgesetz aus derElektrostatik (Kapitel 1.5.1). Dabei spielen Stromelemente I d~l im Ampèregesetz ei-ne analoge Rolle zu Ladungen q im Coulombgesetz. Allerdings gibt es dabei folgendezwei wichtige Unterschiede zu beachten:
• Der vektorielle Charakter der Ströme führt zu Kreuzprodukten im Ampèrege-setz.
• Im Ampèregesetz treten Integrale über geschlossene Stromschleifen auf.
Besonders der letzte Punkt erscheint eigenartig. Tatsächlich sollte das AmpèrescheKraftgesetz in der Magnetostatik nur für geschlossene Stromschleifen formuliert wer-den. Das liegt daran, dass wir hier Magnetostatik betreiben wollen, das heißt wirfordern, dass Ladungs- und Stromverteilungen stationär sind, also zeitunabhängig
∂t ρ = 0, ∂t j = ~0. (3.7)
Ladung und Strom hängen aber andererseits über die Kontinuitätsgleichung zu-sammen
∂t ρ(~r, t) + ~∇ · j(~r, t) = 0. (3.8)
108

Die Kontinuitätsgleichung beschreibt die lokale Ladungserhaltung. Dies ist am bes-ten einzusehen, wenn wir mittels des Gaußschen Integralsatzes zu ihrer integralenForm übergehen
∂tQV = ∂t
∫V
dV ρ(3.8)= −
∫V
dV(~∇ · j
)Gauß= −
∮∂V
d~f · j. (3.9)
In dieser Form besagt die Kontinuitätsgleichung, dass sich die Gesamtladung QV
im Volumen V nur durch Ausfluss von Strom über die Oberfläche ∂V ändern kann.Außer durch Stromfluss kann Ladung nicht aus dem Volumen „verschwinden“, weilsie erhalten ist.
In der Magnetostatik folgt nun wegen ∂t ρ = 0 aus der Kontinuitätsgleichung (3.8)
~∇ · j = 0, (3.10)
das heißt, Ströme in der Magnetostatik sind quellenfrei. Sie können daher immernur in geschlossenen Schleifen auftreten.
3.2 Magnetische Flussdichte ~B und Lorentzkraft
Wir gehen nun ähnlich vor wie bei der Einführung des elektrischen Feldes und be-trachten eine kleine Probe-Stromschleife Γ1 oder ein einzelnes Stromelement I1d~l1am Ort ~r. Ähnlich wie das elektrische Feld wollen wir auch das magnetische Felddurch seine Kraft auf eine solche Probe-Stromschleife definieren.
Die magnetische Flussdichte ~B(~r ) bei ~r wird durch die Kraft auf die Probe-Schleife definiert, indem wir die Ampèrekraft folgendermaßen umschreiben
d~F1 = I1d~l1 × ~B(~r );
~F1 = I1
∮Γ1
d~l1 × ~B(~r ). (3.11)
Für das von einer Schleife Γ′ erzeugte Feld ~B(~r ) gilt dann nach Ampèregesetz
~B(~r ) =µ0
4πI ′∮Γ′
d~l′ × (~r − ~r ′)|~r − ~r ′|3
. (3.12)
Dies ist das Gesetz von Biot und Savart, das das Magnetfeld beschreibt, das vonbeliebig geformten Leiterschleifen erzeugt wird. Wie für das elektrische Feld gilt auchhier das Superpositionsgesetz, das heißt Magnetfelder mehrerer Leiterschleifenaddieren sich. Das reflektiert einfach die Linearität der Gleichungen.
Das Biot-Savart-Gesetz (3.12) ist analog zum Ausdruck
~E(~r ) =1
4πε0
∫dr′ 3ρ(~r ′)
~r − ~r ′
|~r − ~r ′|3(3.13)
109

Abbildung 3.8: Illustration der verschiedenen Vektoren ~r, ~r ′ und d~l′ in (3.12).
für das elektrische Feld, das von einer Ladungsverteilung ρ(~r ) erzeugt wird.
Die Kraft (3.11) ist die Lorentzkraft eines Stromfadens in einem Magnetfeld ~B(~r ).
Allgemein wurde experimentell festgestellt, dass eine sich mit Geschwindigkeit ~vbewegende Ladung q eine Lorentzkraft
~F = q(~v × ~B
)(3.14)
erfährt. Wegen Id~l = dqdtd~l = dq ~v geht (3.14) über in obigen Ausdruck (3.11) für
Stromfäden.
Die Einheiten der magnetischen Flussdichte lassen sich zum Beispiel mittels (3.14)zurückführen auf die Grundeinheiten des SI-Systems
[B] =[F ]
[q][v]= 1
N s
As m= 1
V s
m2 =: 1 T (Tesla).
Die Einheit der magnetischen Flussdichte ist als Tesla (T) definiert. Es stellt sichheraus, dass ein Magnetfeld von 1 T bereits recht groß ist. Daher ist auch eine abge-leitete kleinere Einheit gebräuchlich, das Gauß (G) mit 1 G = 10−4 T. Ein typischesBeispiel eines sehr schwachen Magnetfeldes ist das Erdmagnetfeld mit einer Stär-ke von ungefähr 0,2 G. Ein starker Magnet, z.B. auf Basis supraleitender Spulen,erzeugt Magnetfelder um die 10 T.
Die Analogie zwischen dem magnetischen Feld ~B (3.12) nach Biot-Savart und demelektrischen Feld ~E (3.13) wird noch klarer, wenn wir von Id~l zur Stromdichtej(~r ) übergehen
Stromdichte j =Strom I
Fläche dfI = |j| df, wobei die Richtung senkrecht zur Fläche zeigt.
Id~l = |j| dfd~l = j∣∣∣d~l ∣∣∣ df = j dV.
Es sei daran erinnert, dass Schleifen von Stromfäden dabei immer zusätzlich ~∇·j = 0(Quellenfreiheit) erfüllen.
110

Abbildung 3.9: Zylinder mit Flächenelement df und Linienelement d~l
Abbildung 3.10: Magnetisches Feld eines stromdurchflossenen, geraden und unend-lich langen Leiters
Also gilt für die magnetische Flussdichte induziert von einer beliebigen Stromdichtej(~r ) mit ~∇ · j = 0
~B(~r ) =µ0
4π
∫dr′ 3 j(~r ′)× ~r − ~r ′
|~r − ~r ′|3. (3.15)
Dies ist das Gesetz von Biot und Savart für Stromdichten j.
Nun wollen wir Beispiele zum Biot-Savart-Gesetz (3.12) betrachten. Dazu betrachtenwir von bestimmten „Drahtgeometrien“ erzeugte magnetische Felder. Die wichtigstenBeispiele sind der unendlich lange gerade Draht und eine runde Drahtschleife. Dazuverwenden wir das Biot-Savart-Gesetz in der Form
~B(~r) =µ0
4πI
∮Γ′
d~l′ × (~r − ~r ′)|~r − ~r ′|3
. (3.16)
In der Rechnung muss jeweils der Weg Γ′, der den stromdurchflossenen Draht be-schreibt, parametrisiert und anschließend das Wegintegral berechnet werden.
1) Magnetisches Feld um unendlich langen dünnen geraden Draht, der von einemStrom I durchflossen wird, siehe Abbildung 3.10.
111

Wir legen den Draht auf die z-Achse und verwenden Zylinderkoordinaten. Wir pa-rametrisieren den Weg Γ′ des stromdurchflossenen Drahtes durch
Γ′ : z′ → ~r ′(z′) = z′~ez
d~l′ = d~r ′ = ~ez dz′.
Nach Biot-Savart ist dann das Magnetfeld am Ort ~r gegeben durch
~B(~r) =µ0
4πI
∮Γ′d~l′ × ~r − ~r ′
|~r − ~r ′|3
=µ0
4πI
∫ ∞−∞
dz′~ez ×~r − z′~ez|~r − z′~ez|3
mit
|~r − z′~ez| =(r2 + (z − z′)2
)1/2
~ez × ~ez = 0
~ez × ~r =
001
×xyz
=
−yx0
= r~eϕ.
Gestrichene Koordinaten bezeichnen den Weg entlang des Drahtes, ungestricheneden Beobachtungspunkt ~r, an dem das magnetische Feld berechnet wird, wobeiz = 0 gesetzt werden kann, da es durch die Substitution z′ 7→ z′ + z verschwindet.Nun führen wir das Integral über z′ aus
~B(~r) =µ0
4πIr~eϕ
∫ ∞−∞
dz′1(
r2 + z′2)3/2
=µ0
4πIr~eϕ
z′
r2 (r2 + z′2)1/2
∣∣∣∣∣z′=∞
z′=−∞
,
woraus folgt
~B(~r) = ~eϕµ0I
2πr. (3.17)
Das Magnetfeld bildet geschlossene Ringe um den stromdurchflossenen Draht, sieheAbbildung 3.10, wie wir bereits in den Experimenten mit den Eisenspänen undKompassnadeln gesehen haben, siehe Abbildung 3.2. Außerdem stellen wir fest, dassanalog zum elektrischen Feld eines geladenen Drahtes der Betrag des magnetischenFeldes proportional zu 1/r abfällt, d.h. B ∝ 1/r.
2) Magnetisches Feld einer kreisförmigen Leiterschleife mit Radius R, die vom StromI durchflossen wird. Wir legen die Schleife in die Ebene z′ = 0, den Mittelpunkt inden Ursprung. Der Einfachheit halber halten wir ~ez = ~ez
′ fest.
112

Abbildung 3.11: Stromdurchflossene Schleife mit dem Radius R und dem Strom I
a) Zunächst berechnen wir ~B(z~ez) nur auf der z-Achse in Zylinderkoordinaten.Dazu parametrisieren wir wieder zuerst den Weg Γ′ entlang des stromdurch-flossenen Drahtes mit Hilfe des Winkels ϕ′. Dabei benutzen wir gestricheneKoordinaten für den Weg entlang des Drahtes und ungestrichene für den Be-obachtungspunkt ~r, an dem das magnetische Feld berechnet wird,
Γ′ : ϕ′ → ~r ′(ϕ′) = R
cosϕ′
sinϕ′
0
= R~er′
d~l′ = Rdϕ′
sinϕ′
− cosϕ′
0
= Rdϕ′~eϕ′
Die obere Gleichung folgt aus
d~l = R (~er′(ϕ′ + dϕ′)− ~er ′(ϕ′)) = R(∂ϕ′~er
′)dϕ′ = R~eϕ′dϕ′.
Nach Biot-Savart (3.12) ist dann das Magnetfeld am Ort ~r gegeben durch
~B(z~ez) =µ0
4πI
∫ 2π
0
dϕ′R~eϕ′ × z~ez −R~er ′
|z~ez −R~er ′|3.
Weiterhin gilt, siehe Abbildung 3.12,
|z~ez −R~er ′| = (z2 +R2)1/2
~eϕ′ × ~ez = ~er
′
~eϕ′ × ~er ′ = −~ez.
Die Integration über ϕ′ ist hier sehr einfach, da |z~ez − R~er ′| = (z2 + R2)1/2
unabhängig von ϕ′ ist
~B(z~ez) =µ0
4πI
∫ 2π
0
dϕ ′Rz~er
′ +R~ez(z2 +R2)3/2
=µ0
4πIR2 1
(z2 +R2)3/2
(2π~ez +
z
R
∫ 2π
0
dϕ′~er′).
113

Abbildung 3.12: Stromdurchflossene Schleife
Da das letzte Integral verschwindet, weil der Mittelwert von ~er ′ null ist, er-halten wir
~B(z~ez) = ~ezµ0
2IR2 1
(z2 +R2)3/2. (3.18)
Das magnetische Feld ~B(z) ist für Punkte auf der z-Achse parallel zu ~ez .Weit weg von der Leiterschelife im Fernfeld z r gilt
~B(z) ≈ ~ezµ0
2IR2 1
|z|3
Das erinnert an den charakteristischen 1/r3-Abfall von Dipolfeldern, wie wirsie in der Elektrostatik kennengelernt haben.
b) Nun zum allgemeinen Fall eines beliebigen Beobachtungspunktes ~r. Für dasmagnetische Feld gilt nach Biot-Savart (3.12) und der obigen Überlegung
~B(~r) =µ0
4πI
∫ 2π
0
dϕ′R~eϕ′ × ~r − ~r ′
|~r − ~r ′|3. (3.19)
Hier ist die Rechnung schwierig für beliebiges ~r, die Integrale ergeben letzt-endlich elliptische Funktionen. Wir beschränken uns daher auf das Fernfeld,also |~r ′| = R r = |~r|.Dann können wir eine Taylorentwicklung in ~r ′ um ~r ′ = ~0 bis zur linearenOrdnung vornehmen, die uns dann erlauben wird, die verbleibenden Integra-tionen leicht auszuführen. Zunächst berechnen wir die Taylorentwicklung von(~r − ~r ′)/|~r − ~r ′|3 bis zur linearen Ordnung in zwei Schritten
1
|~r − ~r ′|3=
1
r3+ ~r ′ ·
(~∇′ 1
|~r ′ − ~r|3
)∣∣∣∣~r ′=0
+O(R2)
=1
r3−(
3
|~r ′ − ~r|4~r ′ − ~r|~r ′ − ~r |
)∣∣∣∣~r ′=0
· ~r ′ +O(R2)
=1
r3+
3~r · ~r ′
r5+O(R2).
114

Also gilt
~r − ~r ′
|~r − ~r ′|3=
~r
r3+
3(~r · ~r ′)~rr5
− ~r ′
r3+O(R2).
Das setzen wir in den Ausdruck für ~B(~r) in (3.19) ein
~B(~r) ≈ µ0
4πIR
1
r3
∫ 2π
0
dϕ′~eϕ′ ×[(~r − ~r ′) +
3(~r · ~r ′)~rr2
]und können nun mit etwas Mühe die verbleibende ϕ′-Integration ausführen.Dazu benötigen wir
∫ 2π
0
dϕ′~eϕ′︸ ︷︷ ︸
= 0
×~r = 0, mit ~eϕ ′ =
− sinϕ′
cosϕ′
0
∫ 2π
0
dϕ′ ~eϕ′ × ~r ′︸ ︷︷ ︸−R~ez
= −2πr′~ez, mit ~r ′ = R
cosϕ′
sinϕ′
0
,
und
~eϕ′ × ~r =
z cosϕ′
z sinϕ′
−y sinϕ′ − x cosϕ′
und ~r · ~r ′ = R(x cosϕ′ + y sinϕ′),
wobei ~r = (x, y, z).Alle entstehenden ϕ′-Integrale sind von einer der zwei Formen∫ 2π
0
dϕ′ cos2 ϕ′ =
∫ 2π
0
sin2 ϕ′ = π∫ 2π
0
dϕ′ cosϕ′ sinϕ′ =
∫ 2π
0
dϕ′1
2sin 2ϕ′ = 0
und so ergibt sich
∫ 2π
0
dϕ′(~eϕ′ × ~r)(~r · ~r ′) = Rπ
zxzy
−x2 − y2 − z2 + z2
= Rπ
(z~r − ~ezr2
).
Damit erhalten wir schließlich folgendes Ergebnis für das magnetische Feld
~B(~r) =µ0
4πIR2 1
r3
(2~ez +
3
r2(z~r − ~ezr2)
)+O
(1
r4
)=µ0
4πIπR2 3z~r − ~ezr2
r5+O
(1
r4
)(3.20)
115

An dieser Stelle erinnern wir uns an das elektrische Feld eine elektrischenDipols mit Dipolmoment ~p aus Kapitel 1.9.1, Formel (1.85)
~ED(~r) =1
4πε0
1
r5
(3(~r · ~p)~r − ~pr2
).
Wir stellen fest, dass (3.20) genau die gleiche Form besitzt wie
~B(~r) =µ0
4π
1
r5
(3(~r · ~m)~r − ~mr2
), (3.21)
wenn wir ein magnetisches Dipolmoment ~m definieren
~m := I(πR2)~ez. (3.22)
Hier ist πR2 die Fläche, die von der Leiterschleife umschlossen wird und ~ez derEinheitsvektor normal zu dieser Kreisfläche. Das gilt tatsächlich im Allgemei-nen für eine beliebige Schleifenform, siehe Übung.
Abbildung 3.13: Magnetisches Dipolmoment ~m = I · A~ez der runden Leiterschleifemit Fläche A
Das Magnetfeld ~B um die Leiterschleife ist in Abbildung 3.14 gezeigt. Manbeachte die völlige Analogie zur Abbildung 1.51 des elektrischen Dipolfeldesin Kapitel 1.9.1 .
3.3 Maxwellgleichungen und Vektorpotential
Nun wollen wir ausgehend vom Biot-Savart-Gesetz (3.12) für eine Stromdichte ~j(~r)die Maxwellgleichungen der Magnetostatik herleiten. Dazu werden wir die Divergenz~∇ · ~B und die Rotation ~∇× ~B für
~B(~r) =µ0
4π
∫dr′ 3~j(~r ′)× ~r − ~r ′
|~r − ~r ′|3(3.23)
berechnen. Zunächst bemerken wir, dass wir den letzten Faktor in (3.23) als Gradi-enten bezüglich ~r schreiben können
~r − ~r ′
|~r − ~r ′|3= −~∇~r
1
|~r − ~r ′|.
116

Abbildung 3.14: Links: Magnetisches Dipolfeld einer kleinen runden Leiterschleife.Rechts: Ein Permanentmagnet erzeugt das gleiche Magnetfeld im Fernfeld.
Die Stromdichte ~j(~r ′) im Integranden in (3.23) hängt nicht von ~r ab. Für ~j unab-hängig von ~r gilt für eine beliebige Funktion a(~r) folgende Produktregel
~∇~r × (a(~r)~j) =(~∇~ra
)×~j = −~j ×
(~∇~ra
)Mit a(~r) := 1/|~r − ~r ′| benutzen wir diese Regel „rückwärts“ und finden
~B(~r) = −µ0
4π
∫dr′ 3~j(~r ′)× ~∇~r
1
|~r − ~r ′|
=µ0
4π~∇~r ×
∫dr′ 3~j(~r ′)
1
|~r − ~r ′|.
Wir können ~B also als~B(~r) = ~∇× ~A(~r) (3.24)
schreiben mit dem Vektorpotential
~A(~r) :=µ0
4π
∫dr′ 3
~j(~r)
|~r − ~r ′|. (3.25)
Das Vektorpotential ist in Analogie zu sehen zu (1.31)
~E = −~∇φ
mit dem elektrostatischen Potential (1.30)
Φ(~r) =1
4πε0
∫dr′ 3
ρ(~r ′)
|~r − ~r ′|.
117

Abbildung 3.15: Illustration der Quellenfreiheit des magnetischen Feldes
Aus der Existenz eines Vektorpotentials (3.24) folgt sofort~∇ · ~B = ~∇ · (~∇× ~A) = 0.
Als Merkregel gilt, dass Rotationsfelder quellenfrei sind. Also finden wir
~∇ · ~B = 0 (3.26)
Das ist die 1. Maxwellgleichung der Magnetostatik. In Worten besagt sie, dassMagnetfelder quellenfrei sind. Daraus folgt,
• es gibt keine magnetischen Ladungen (Quellen/Senken),• Magnetische Feldlinien sind immer geschlossen, sie enden in keiner Quel-
le/Senke.
Die integrale Form der 1. Maxwellgleichung der Magnetostatik erhalten wirüber den Satz von Gauß, siehe Abbildung 3.15,∮
∂V
d~f · ~B Gauß=
∫V
dV (~∇ · ~B)(3.26)= 0. (3.27)
In dieser integralen Form besagt die Maxwellgleichung, dass dermagnetische FlussΦB durch beliebige geschlossene Flächen gleich Null ist.Die Beziehung (3.24) definiert ganz allgemein das Vektorpotential ~A eines Feldes~B. Es gilt der wichtige mathematische Satz
Existenz eines Vektorpotential ~A mit ~∇× ~A = ~B ⇔ ~∇ · ~B = 0. (3.28)
Die Hinrichtung „⇒“ haben wir in (3.26) gezeigt.Die Rückrichtung „⇐“ zeigen wir später.
Um die zweite Maxwellgleichung zu erhalten, bilden wir nun auch ~∇× ~B
~∇× ~B = ~∇× (~∇× ~A)
= ~∇(~∇ · ~A)− ~∇2 ~A
=µ0
4π~∇~r∫dr′ 3~∇~r ·
(~j(~r ′)
1
|~r − ~r ′|
)− µ0
4π
∫dr′ 3~j(~r ′)~∇2
~r
1
|~r − ~r ′|
118
Der Ausdruck ~∇2 ~A = ∆ ~A ist als komponentenweise Anwendung des Laplaceope-rators auf die kartesischen Vektorkomponenten zu verstehen. Im zweiten Termbenutzen wir aus (1.48)
∆1
|~r − ~r ′|= −4πδ(~r − ~r ′).
Im ersten Term erhalten wir mithilfe der Produktregel
~∇~r ·(~j(~r ′)
1
|~r − ~r ′|
)= ~j(~r ′) · ~∇~r
1
|~r − ~r ′|
= −~j(~r ′) · ~∇~r ′1
|~r − ~r ′|
= −~∇~r ′ ·(~j(~r ′)
1
|~r − ~r ′|
)+(~∇~r ′ ·~j(~r ′)
)︸ ︷︷ ︸
=0 in Magnetostatik
1
|~r − ~r ′|.
Weiterhin gilt∫dr′ 3~∇~r ·
(~j(~r ′)
1
|~r − ~r ′|
)=
∫R3
dr′ 3~∇~r ′ ·(~j(~r ′)
1
|~r − ~r ′|
)Gauß=
∫∂R3
d~f ′ ·~j(~r ′) 1
|~r − ~r ′|= 0.
Der Rand ∂R3 des Gesamtraumes liegt im Unendlichen |~r ′| → ∞. Dort sollte esaber keine Ströme geben, also verschwindet ~j(~r ′) dort. Damit finden wir insgesamt
~∇× ~B =µ0
4π
∫dr′ 3~j(~r ′) 4πδ(~r − ~r ′)
= µ0~j(~r),
also gilt~∇× ~B = µ0
~j(~r). (3.29)
Das ist die 2. Maxwellgleichung der Magnetostatik. In Worten besagt sie, dassMagnetfelder reine Wirbelfelder sind, deren Wirbelstärke durch die Stromdichte~j gegeben ist.
Die integrale Form der 2. Maxwellgleichung der Magnetostatik erhalten wirüber den Satz von Stokes ∮
∂A
d~r · ~B =
∫A
d~f · (~∇× ~B)
= µ0
∫A
d~f ·~j
= µ0IA.
(3.30)
Dabei ist IA der Gesamtstrom durch die FlächeA. Dieses Gesetz heißt auchAmpère-sches (Durchflutungs-)Gesetz. In Worten besagt das Ampèresche Durchflutungs-gesetz, dass das Integral von ~B längs des geschlossenen Randes ∂A einer beliebigenFläche A gleich dem Strom IA durch diese Fläche ist.
119

Das Ampèresche Durchflutungsgesetz kann sehr häufig genutzt werden, um magneti-sche Felder von Stromverteilungen zu berechnen. Dabei ist es wichtig, dass die Wahlder Fläche A beliebig ist. In der Praxis bedeutet das, dass bei der Anwendung desAmpèreschen Durchflutungsgesetzes eine der Symmetrie des Problems angepassteFläche gewählt wird.
120