pl7 junior/pro funciones específicas autómatas...
TRANSCRIPT

3500
2679
00
PL7 Junior/ProFunciones específicas autómatas PremiumComando de ejes paso a pasoTLX DS 57 PL7 40S spaV4.0

2
Documentos relacionados
Documentos relacionados
Presentación Este manual se compone de 8 tomos: l Tomo 1
l Comunes de las Funciones específicasl Función específica Todo o Nadal Puesta en marcha de AS-il Función específica de diálogo del operador
l Tomo 2l Función específica de contaje
l Tomo 3l Función específica de comando de ejes
l Tomo 4l Función específica de comando de ejes paso a paso
l Tomo 5l Función específica de leva electrónica
l Tomo 6l Función específica SERCOS
l Tomo 7l Función específica analógical Función específica de control PIDl Función específica de pesaje
l Tomo 8l Función específica de regulación
TLX DS 57 PL7 40S 09.2000 3

Documentos relacionados
4 TLX DS 57 PL7 40S 09.2000
Tabla de materias
Acerca de este . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .9
Capítulo 1 Generalidades sobre el comando de eje de paso a paso . . . . 11Presentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11Presentación de la oferta de comando de ejes paso a paso . . . . . . . . . . . . . . . 12Funciones que ofrecen los módulos de comando de ejes . . . . . . . . . . . . . . . . . 14Generalidades sobre el comando de eje de paso a paso. . . . . . . . . . . . . . . . . . 16
Capítulo 2 Metodología de puesta en marcha . . . . . . . . . . . . . . . . . . . . . . 19Metodología de puesta en marcha de un comando de eje paso a paso. . . . . . . 19
Capítulo 3 Ejemplo de iniciación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Presentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21Descripción del ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22Prerrequisitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26Configuración del módulo TSX CFY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27Ajuste del módulo TSX CFY . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29Simbolización de las variables del ejemplo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31Programación del tratamiento preliminar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35Programación del Grafcet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38Programación de las transiciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39Programación de las acciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40Programación del tratamiento posterior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41Transferencia del programa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43Toma en mano en modo manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44Depuración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46Archivado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Capítulo 4 Configuración del comando de ejes paso a paso . . . . . . . . . .49Presentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49Configuración de los módulos de comando de ejes . . . . . . . . . . . . . . . . . . . . . . 50Declaración de los módulos de comando de ejes. . . . . . . . . . . . . . . . . . . . . . . . 51Acceso a la pantalla de configuración de los parámetros . . . . . . . . . . . . . . . . . . 54Configuración de las unidades de usuario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56Configuración del modo de comando del traductor. . . . . . . . . . . . . . . . . . . . . . . 58
5
Configuración de los parámetros de comando . . . . . . . . . . . . . . . . . . . . . . . . . . 60Configuración de la inversión del traductor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62Configuración de la sobrealimentación del traductor. . . . . . . . . . . . . . . . . . . . . . 63Configuración del freno del motor paso a paso . . . . . . . . . . . . . . . . . . . . . . . . . . 64Configuración de la tarea de sucesos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65Configuración del punto de origen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66Validación de los parámetros de configuración . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Capítulo 5 Programación del comando de ejes paso a paso. . . . . . . . . . 73Presentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73Principio de programación de un eje paso a paso. . . . . . . . . . . . . . . . . . . . . . . . 75Modos de funcionamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76Programación de la función SMOVE (en modo automático) . . . . . . . . . . . . . . . 78Introducción de los parámetros de la función SMOVE . . . . . . . . . . . . . . . . . . . . 79Descripción de los parámetros de la función SMOVE . . . . . . . . . . . . . . . . . . . . 80Códigos de la función SMOVE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82Descripción de los desplazamientos elementales con la función SMOVE . . . . . 84Descripción de los códigos de instrucción SMOVE . . . . . . . . . . . . . . . . . . . . . . . 86Ejemplo de uso de una posición indexada (movimientos repetitivos) . . . . . . . . . 92Encadenamiento de los comandos de movimiento . . . . . . . . . . . . . . . . . . . . . . . 94Función PAUSE diferida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97Función PAUSE inmediata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99Tratamiento de sucesos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101Gestión de los modos de funcionamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103Gestión de fallos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104Descripción de los fallos de equipo externos. . . . . . . . . . . . . . . . . . . . . . . . . . . 108Descripción de los fallos de la aplicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110Descripción de los fallos de comando rechazado . . . . . . . . . . . . . . . . . . . . . . . 111Gestión del modo manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112Comandos de desplazamiento a vista . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114Comandos de desplazamiento incremental. . . . . . . . . . . . . . . . . . . . . . . . . . . . 116Comando de punto de origen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117Comando de punto de origen forzado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118Gestión del modo directo (DIRDRIVE) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119Gestión del modo parada (OFF) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Capítulo 6 Ajuste del comando de ejes paso a paso . . . . . . . . . . . . . . . 123Presentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123Operaciones preliminares al ajuste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124Acceso a los parámetros de ajuste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125Ajuste de la trayectoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 127Ajuste de la salida del freno. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129Ajuste del plano de parada . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131Ajuste de los parámetros del modo manual. . . . . . . . . . . . . . . . . . . . . . . . . . . . 133Validación de los parámetros de ajuste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134Guardado / Restitución de los parámetros de ajuste. . . . . . . . . . . . . . . . . . . . . 135
6

Reconfiguración en modo conectado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Capítulo 7 Depuración de un programa de comando de ejes de paso a paso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .139Presentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139Principio de Depuración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140Interfaz de usuario de la pantalla de depuración . . . . . . . . . . . . . . . . . . . . . . . 142Descripción de las pantallas de depuración . . . . . . . . . . . . . . . . . . . . . . . . . . . 144Detalle de las informaciones de la pantalla de depuración . . . . . . . . . . . . . . . . 146Modo parada (Off) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151Modo Directo (Dir Drive) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152Modo manual (Manu) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153Modo automático (Auto) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154Diagnóstico de la vía . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155Archivado, documentación y simulación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 157
Capítulo 8 Explotación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .159Concepción de un diálogo del operador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
Capítulo 9 Diagnóstico y mantenimiento . . . . . . . . . . . . . . . . . . . . . . . . .161Presentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161Supervisión de los fallos y las condiciones de ejecutabilidad de los comandos 162Ayuda al diagnóstico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
Capítulo 10 Funciones complementarias . . . . . . . . . . . . . . . . . . . . . . . . . .167Aprendizaje de cotas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
Capítulo 11 Características y rendimiento . . . . . . . . . . . . . . . . . . . . . . . . .171Rendimiento y limitaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
Capítulo 12 Los objetos de lenguaje de la función específica de comando de ejes de paso a paso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .175Presentación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175Presentación de los objetos lenguaje de la función específica comando de eje de paso a paso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176Intercambios entre el procesador y el módulo de comando de ejes . . . . . . . . . 177Presentación de los intercambios implícitos . . . . . . . . . . . . . . . . . . . . . . . . . . . 179Presentación de los intercambios explícitos . . . . . . . . . . . . . . . . . . . . . . . . . . . 180Gestión del intercambio y confirmación de los objetos explícitos . . . . . . . . . . . 182Datos generales del módulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185Datos internos de comando (intercambios implícitos). . . . . . . . . . . . . . . . . . . . 186Datos internos de estado (intercambios implícitos). . . . . . . . . . . . . . . . . . . . . . 188Datos internos de estado (intercambios explícitos). . . . . . . . . . . . . . . . . . . . . . 190Parámetros de ajuste (intercambios explícitos) . . . . . . . . . . . . . . . . . . . . . . . . 192Lista de los códigos de error CMD_FLT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
7
Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
8
Acerca de este
Presentación
Objeto Este manual describe la puesta en marcha a partir del programa PL7 de la función específica del comando de ejes paso a paso en los autómatas TSX Premium.
Campo de aplica-ción
Esta documentación actualizada toma en cuenta las características de PL7 V4. Sin embargo, permite aprovechar las versiones anteriores de PL7.
Revisiones
Documentos re-lacionados
Advertencia
Comentarios del usuario
Envíe sus comentarios a la dirección electrónica [email protected]
Rev. N°. Modificaciones
1 Stepper motor axis control (specific functions)
Título Reference Number
Manual de puesta en marcha del equipo TSX DM 57 40S
TLX DS 57 PL7 40S 09.2000 9

Acerca de este
10 TLX DS 57 PL7 40S 09.2000

TLX DS 57 PL7 40S 09.2000
1
Generalidades sobre el comando de eje de paso a pasoPresentación
Objeto de este capítulo
Este capítulo presenta el comando de eje de paso a paso, la oferta del producto y las funciones específicas asociadas.
Contenido Este capítulo contiene los siguiente apartados:
Apartado Página
Presentación de la oferta de comando de ejes paso a paso 12
Funciones que ofrecen los módulos de comando de ejes 14
Generalidades sobre el comando de eje de paso a paso 16
11
Generalidades
Presentación de la oferta de comando de ejes paso a paso
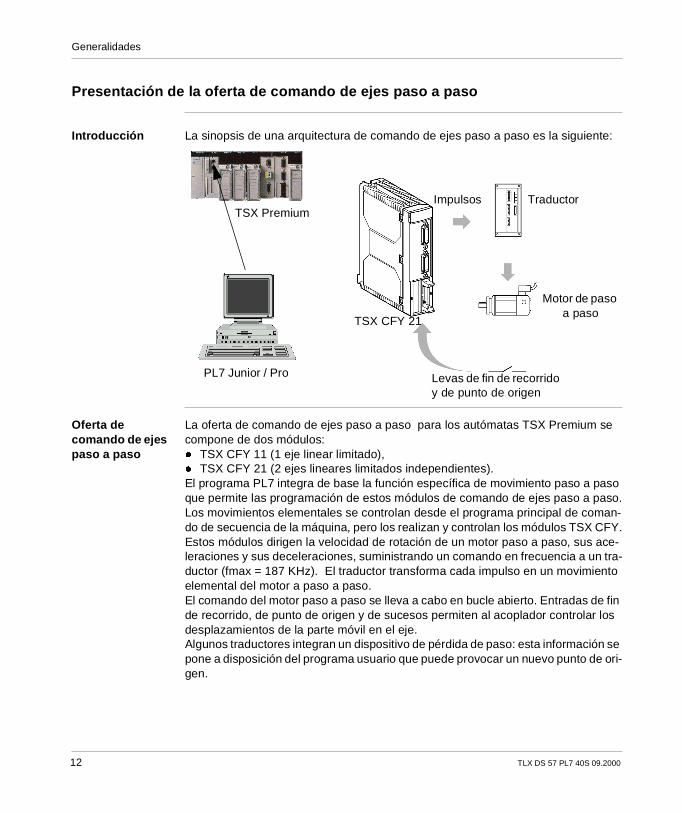
Introducción La sinopsis de una arquitectura de comando de ejes paso a paso es la siguiente:
Oferta de comando de ejes paso a paso
La oferta de comando de ejes paso a paso para los autómatas TSX Premium se compone de dos módulos:l TSX CFY 11 (1 eje linear limitado),l TSX CFY 21 (2 ejes lineares limitados independientes).El programa PL7 integra de base la función específica de movimiento paso a paso que permite las programación de estos módulos de comando de ejes paso a paso.Los movimientos elementales se controlan desde el programa principal de coman-do de secuencia de la máquina, pero los realizan y controlan los módulos TSX CFY.Estos módulos dirigen la velocidad de rotación de un motor paso a paso, sus ace-leraciones y sus deceleraciones, suministrando un comando en frecuencia a un tra-ductor (fmax = 187 KHz). El traductor transforma cada impulso en un movimiento elemental del motor a paso a paso.El comando del motor paso a paso se lleva a cabo en bucle abierto. Entradas de fin de recorrido, de punto de origen y de sucesos permiten al acoplador controlar los desplazamientos de la parte móvil en el eje.Algunos traductores integran un dispositivo de pérdida de paso: esta información se pone a disposición del programa usuario que puede provocar un nuevo punto de ori-gen.
TSX PremiumTraductor
Motor de paso a paso
Levas de fin de recorrido y de punto de origen
PL7 Junior / Pro
TSX CFY 21
Impulsos
12 TLX DS 57 PL7 40S 09.2000
Generalidades
La oferta de comando de eje paso a paso incluye, asimismo, el cable TSX CXP 611 para conectar directamente los módulos TSX CFY 11/21 con los traductores MSD y SP del constructor Phyton Lektronik Gmbh.
TLX DS 57 PL7 40S 09.2000 13

Generalidades
Funciones que ofrecen los módulos de comando de ejes
Generalidades Los módulos de comando de ejes ofrecen para cada uno de los ejes entradas y sa-lidas de aplicación que permiten poner en marcha las diversas funciones.La siguiente sinopsis presenta las entradas/salidas asociadas a una vía:
Entradas/salidas de aplicación
Los módulos de comando de ejes paso a paso ofrecen para cada uno de los ejes:para las entradas/salidas auxiliares:l una entrada de leva de punto de origen,l dos entradas de fin de recorrido,l una entrada de suceso,l una entrada de parada de urgencia,l una entrada stop externa,l una salida estática para el freno del eje.
Validación del traductor
Sobrealimentación
Impulsos +
Impulsos – o sentido
Control del traductor
Pérdida de pasos
Reactivación del control de pérdida de pasos
Freno
Parada de urgencia
Stop externo
Tope de fin de recorrido -
Tope de fin de recorrido +
Leva de punto de origen
Suceso externo
Control de los comandos
Parámetros de funcionamiento
Estado
Modos
Validación del control
Generador de impulsos
Levas y topes
PROGRAMA DE LA APLICACIÓN
INTERFAZ
14 TLX DS 57 PL7 40S 09.2000
Generalidades
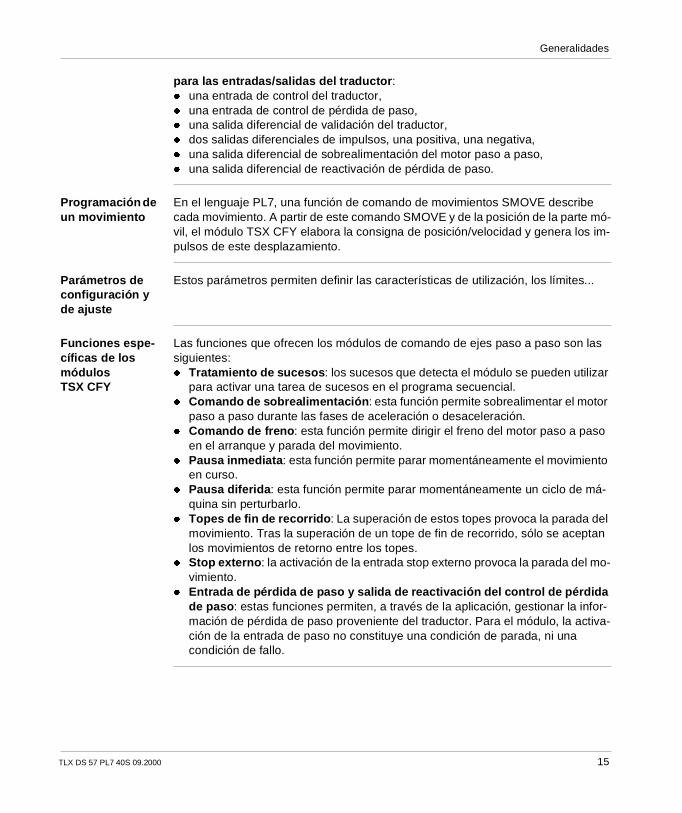
para las entradas/salidas del traductor:l una entrada de control del traductor,l una entrada de control de pérdida de paso,l una salida diferencial de validación del traductor,l dos salidas diferenciales de impulsos, una positiva, una negativa,l una salida diferencial de sobrealimentación del motor paso a paso,l una salida diferencial de reactivación de pérdida de paso.
Programación de un movimiento
En el lenguaje PL7, una función de comando de movimientos SMOVE describe cada movimiento. A partir de este comando SMOVE y de la posición de la parte mó-vil, el módulo TSX CFY elabora la consigna de posición/velocidad y genera los im-pulsos de este desplazamiento.
Parámetros de configuración y de ajuste
Estos parámetros permiten definir las características de utilización, los límites...
Funciones espe-cíficas de los módulos TSX CFY
Las funciones que ofrecen los módulos de comando de ejes paso a paso son las siguientes:l Tratamiento de sucesos: los sucesos que detecta el módulo se pueden utilizar
para activar una tarea de sucesos en el programa secuencial.l Comando de sobrealimentación : esta función permite sobrealimentar el motor
paso a paso durante las fases de aceleración o desaceleración.l Comando de freno: esta función permite dirigir el freno del motor paso a paso
en el arranque y parada del movimiento.l Pausa inmediata: esta función permite parar momentáneamente el movimiento
en curso.l Pausa diferida: esta función permite parar momentáneamente un ciclo de má-
quina sin perturbarlo.l Topes de fin de recorrido: La superación de estos topes provoca la parada del
movimiento. Tras la superación de un tope de fin de recorrido, sólo se aceptan los movimientos de retorno entre los topes.
l Stop externo: la activación de la entrada stop externo provoca la parada del mo-vimiento.
l Entrada de pérdida de paso y salida de reactivación del control de pérdida de paso : estas funciones permiten, a través de la aplicación, gestionar la infor-mación de pérdida de paso proveniente del traductor. Para el módulo, la activa-ción de la entrada de paso no constituye una condición de parada, ni una condición de fallo.
TLX DS 57 PL7 40S 09.2000 15

Generalidades
Generalidades sobre el comando de eje de paso a paso
Presentación de las funciones específicas
Las funciones específicas del comando de ejes de paso a paso se aplica a cualquier cadena de comando compuesta de: l el comandol el traductorl el motor de paso a paso.Las nociones importantes son las siguientes:l la frecuencia de arranque y de parada SS_FREQl la sobrealimentaciónl la salida freno
Sinopsis de la cadena de comando de eje de paso a paso
Esta sinopsis describe una cadena típica de comando de eje de paso a paso
Descripción
Comando Traductor Motor de paso a paso
Bloque Descripción
Comando La función de comando la tiene una vía de un módulo TSX FCY 11 o 21. La función principal de esta vía es la de proporcionar un tren de impulsos de frecuencia controlada en todo momento, para realizar las funciones so-licitadas.
Traductor La función esencial del traductor es la de transformar cada impulso reci-bido en un paso (rotación elemental) del motor, que hace circular las cor-rientes adecuadas en sus arrollamientos.
Motor de paso a paso
Los motores de paso a paso se construyen según diferentes tecnologías. Se pueden citar los motores con imanes permanentes, los motores con reluctancia variable y les motores híbridos, que combinan las dos técni-cas. Por otro lado, existen diversas soluciones de arrollamiento en el mer-cado: los motores de dos, cuatro o cinco fases.Así, cada tipo de motor está asociado a un tipo de traductor específico op-timizado para su tecnología.
16 TLX DS 57 PL7 40S 09.2000
Generalidades
Frecuencia de arranque y de parada
El comando de los diferentes sistemas de paso a paso también debe obedecer una orden común, debido a la respuesta del sistema inercial (motor + eje) a un comando pulsado. Se trata de la orden común de frecuencia de arranque y parada.La frecuencia de arranque y de parada es la frecuencia a la que el motor puede pa-rar o arrancar sin rampa y sin pérdida de paso. Su valor límite máximo depende de la inercia externa respecto al eje motor. Su valor medio se sitúa a 400 Hz en 1/2 paso (1 revolución/es) y puede ser crítico al pasar de 600/800 Hz (1,5 a 2 revolu-ción/es) (valores típicos para traductores/motor200 pasos/revolución Phytron Elek-tronik).Esta orden existe tanto en la parada como en el arranque de todo movimiento, de ahí su nombre: frecuencia de arranque y de parada, SS_FREQ (Start Stop Fre-quency). Los módulos TSX CFY permiten ajustar este valor.
La sobrealimen-tación
Algunos traductores poseen una entrada de sobrealimentación. Esta función con-siste en aumentar la corriente en los arrollamientos de motor.La salida de sobrealimentación de una vía de un módulo TSX CFY dirige esta en-trada del traductor. Por eso, es posible dirigir la intensidad de la corriente del motor de modo síncrono con el movimiento. Sobre todo, el modo de gestión automática de esta salida permite activarla durante las fases de aceleración y deceleración.
La salida freno Cuando un freno está presente en el eje, esta salida estática permite dirigirlo de modo síncrono con el movimiento o según la petición del usuario.Esta función es útil cuando se quiere interrumpir la alimentación del motor en las aplicaciones con cargas de impulso.
Nota: en este manual, se emplea indiferentemente los términos frecuencia y ve-locidad. Asimismo, las unidades de posición de impulso y pulso son equivalentes. Ocurre lo mismo con las unidades de velocidad Hercio y Pulso/s y las unidades
de aceleración Hercio/s y Pulso/s2.
Nota: cuando la vía está en posición de seguridad, esta salida pone el freno en estado activo (generalmente, el freno está activo cuando no hay tensión).
TLX DS 57 PL7 40S 09.2000 17

Generalidades
18 TLX DS 57 PL7 40S 09.2000

TLX DS 57 PL7 40S 09.2000
2
Metodología de puesta en marchaMetodología de puesta en marcha de un comando de eje paso a paso
Sinopsis de la metodología de puesta en marcha de un eje paso a paso
El siguiente organigrama resume las diferentes fases de puesta en marcha. Para aprehender bien las diferentes fases, se debe consultar, asimismo, el ejemplo de inicio (Véase Ejemplo de iniciación, p. 21), que es un complemento de este organi-
19

Metodología
grama.
(1) Si antes de la fase de programación, desea desplazarse en modo manual la parte móvil sobre los diferentes ejes, podrá saltar la etapa 3. No obstante, las etapas 1, 2, 4, 5 y 6 son obligatorias.
(2) La fase de programación podrá ir precedida de una fase de presimbolización de las varia-bles, que se lleva a cabo mediante el editor de variables. La presimbolización permite ge-nerar automáticamente los símbolos del módulo de comando de ejes.
Declaración del módulo en la configuración del autómata
Configuración de los parámetros del eje
Programación de los movimientos (2)
Transferencia de la aplicación en memoria autómata
Ajuste de los parámetros de los ejes
Intentos y depuración
Edición de la carpeta
Explotación
Editor de configuración
Editor de configuraciónModos de configuración y ajuste
Editor de programa
Editor de configuraciónModo de ajuste
Editor de configuraciónModo de depuración
Editor de documentación
CCX 17
1
2
3
4
5
6
7
8
Concepción
Ajuste y depuración
Explotación
En modo local
En modo conectado
En modo conectado
(1)
Declaración del módulo en la configuración del autómata
Configuración de los parámetros del eje
Programación de los movimientos (2)
Transferencia de la aplicación en memoria autómata
Ajuste de los parámetros de los ejes
Intentos y depuración
Edición de la carpeta
Explotación
20 TLX DS 57 PL7 40S 09.2000
TLX DS 57 PL7 40S 09.2000
3
Ejemplo de iniciaciónPresentación
Objeto de este capítulo
Este capítulo describe un ejemplo de puesta en marcha de una aplicación de co-mando de ejes mediante un módulo TSX CFY. Este ejemplo se ofrece a título di-dáctico y permite seguir todas las fases necesarias para la puesta en marcha de un comando de ejes de paso a paso.
Contenido Este capítulo contiene los siguiente apartados:
Apartado Página
Descripción del ejemplo 22
Prerrequisitos 26
Configuración del módulo TSX CFY 27
Ajuste del módulo TSX CFY 29
Simbolización de las variables del ejemplo 31
Programación del tratamiento preliminar 35
Programación del Grafcet 38
Programación de las transiciones 39
Programación de las acciones 40
Programación del tratamiento posterior 41
Transferencia del programa 43
Toma en mano en modo manual 44
Depuración 46
Archivado 47
21

Ejemplo de iniciación
Descripción del ejemplo
Introducción El siguiente ejemplo permite seguir todas las fases de puesta en marcha de una aplicación de comando de ejes TSX CFY. Es un complemento a las metodologías de puesta en marcha.
Dispositivo de transferencia
Un dispositivo de transferencia asegura la evacuación de las piezas en la salida de mecanizado. Este dispositivo se compone de una pinza que se puede desplazar en el espacio siguiendo un plano (ejes X, Y) paralelo al suelo.Desde el momento en el que una pieza se presenta en la cinta A de evacuación, la pinza la va a buscar automáticamente para depositarla en la cinta B o en la cinta C, dependiendo del tipo de pieza. A continuación, la pinza vuelve a la posición de es-pera para una futura toma una vez que se detecta la nueva pieza fabricada.La siguiente figura ilustra este dispositivo de transferencia:
Máquina de mecanizado
Cinta ACinta B
Cinta C
C1
C4
C3
C2
22 TLX DS 57 PL7 40S 09.2000

Ejemplo de iniciación
Entradas / salidas
Las entradas / salidas son las siguientes:
Grafcet de la aplicación
El Grafcet de la aplicación es el siguiente:
E/S Descripción
C1 Célula de detección de la presencia de una pieza fabricada.
C2 Captador de identificación del tipo de pieza.
C3 Captador de detección de pinza abierta / pinza cerrada.
C4 Célula de detección de borde de pieza (situada en la pinza), conectada a la en-trada de sucesos del acoplador.
ENC0 Codificador incremental de posición del eje X.
ENC1 Codificador incremental de posición del eje Y.
A/C pinza Comando de apertura / cierre de la pinza.
0
1
2
3
4
5
6
Punto de origen
Desplazamiento a la posición de espera
Desplazamiento hacia la cinta A
Cierre de pinza
Desplazamiento a la cinta B
Apertura de pinza
Desplazamiento a la cinta C8
Ejes referenciados
Detección de una pieza fabricada
Detección de borde de pieza y pinza parada
Pieza de tipo 1 y pinza cerrada
Pinza parada
Pinza abierta
Pieza de tipo 2 y pinza cerrada
Pinza parada
TLX DS 57 PL7 40S 09.2000 23

Ejemplo de iniciación
Descripción de la trayectoria
El siguiente diagrama describe la trayectoria de la pinza:
1 Punto de origen de la velocidad Vp0,
2 Desplazamiento a la velocidad Vret hacia la posición de espera (Xatt, Yatt) con parada,
3 Desplazamiento hacia la cinta A (XA, YA) a la velocidad VA, hasta la detección de la pieza fabricada,
4 Desplazamiento hacia la cinta B (XB, YB) a la velocidad VB, con parada,
6 Desplazamiento hacia la cinta C (XC, YC) a la velocidad VC, con parada,
5, 7 Desplazamiento a la posición de espera (Xatt, Yatt) a la velocidad Vret, con parada,
Y_LMAX
X_LMIN
Y_LMINX_LMAX
Cinta A
Cinta B
Cinta C
Posición de espera
1
2
3
4
5
6
7
24 TLX DS 57 PL7 40S 09.2000

Ejemplo de iniciación
Panel frontal de diálogo del operador
Los siguientes comandos reagrupados en un panel frontal, permiten controlar la parte móvil en modo manual cuando la instalación está en fallo. Un módulo de en-tradas y un módulo de salidas TON genera los comandos y los indicadores.
Auto / Manu Conmutador de selección del modo de funcionamiento.
Inicio del ciclo Ejecución del ciclo automático.
Parada del ciclo Parada del ciclo automático.
Selección del eje X / Y Selección del eje que se va a controlar en modo manual
Punto de origen Punto de origen manual en el eje seleccionado.
Avance / Retroceso Comando de desplazamiento manual del eje seleccionado, en el sentido positivo o negativo.
Fallo Indicador que reagrupa el conjunto de fallos del equipo y de la aplicación.
Confirm. Fallo Comando de confirmación de fallos.
Parada de urgencia Parada inmediata de la parte móvil independientemente del modo selec-cionado.
Apertura de pinza Comando de apertura de la pinza.
Cierre de pinza Comando de cierre de la pinza.
Auto
Manu
X Y Fallo
Selección de eje
Iniciociclo
Puntode origen
Confirm.Fallo
Paradaciclo Retroceso
Avance Paradade
urgencia
Aperturade pinza
Cierrede pinza
TLX DS 57 PL7 40S 09.2000 25

Ejemplo de iniciación
Prerrequisitos
Prerrequisitos Para describir únicamente las funciones específicas del comando de ejes, se supo-ne que se han realizado las siguientes operaciones: l Se instala el programa PL7,l Se realiza la instalación del equipo: se conectan los módulos y los traductores
que controlan los dos ejes.
26 TLX DS 57 PL7 40S 09.2000
Ejemplo de iniciación
Configuración del módulo TSX CFY
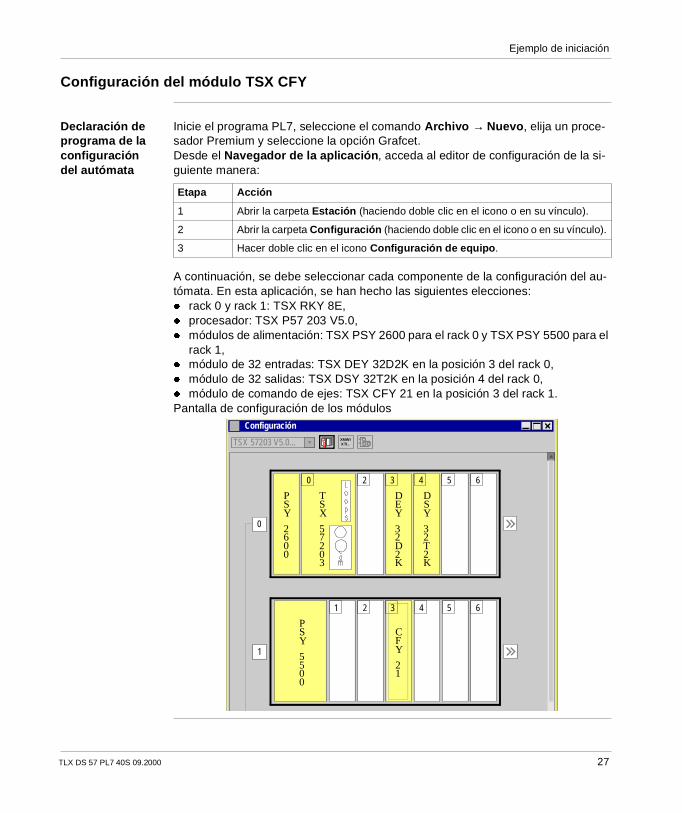
Declaración de programa de la configuración del autómata
Inicie el programa PL7, seleccione el comando Archivo → Nuevo , elija un proce-sador Premium y seleccione la opción Grafcet.Desde el Navegador de la aplicación , acceda al editor de configuración de la si-guiente manera:
A continuación, se debe seleccionar cada componente de la configuración del au-tómata. En esta aplicación, se han hecho las siguientes elecciones:l rack 0 y rack 1: TSX RKY 8E,l procesador: TSX P57 203 V5.0,l módulos de alimentación: TSX PSY 2600 para el rack 0 y TSX PSY 5500 para el
rack 1,l módulo de 32 entradas: TSX DEY 32D2K en la posición 3 del rack 0,l módulo de 32 salidas: TSX DSY 32T2K en la posición 4 del rack 0,l módulo de comando de ejes: TSX CFY 21 en la posición 3 del rack 1.Pantalla de configuración de los módulos
Etapa Acción
1 Abrir la carpeta Estación (haciendo doble clic en el icono o en su vínculo).
2 Abrir la carpeta Configuración (haciendo doble clic en el icono o en su vínculo).
3 Hacer doble clic en el icono Configuración de equipo .
Configuración
TSX 57203 V5.0... XMWI XTI..
0 2 3 4 5 6
0
PSY
2600
TSX
57203
DEY
32D2K
DSY
32T2K
2 3 4 5 6
1
CFY
21
1
PSY
5500
TLX DS 57 PL7 40S 09.2000 27
Ejemplo de iniciación
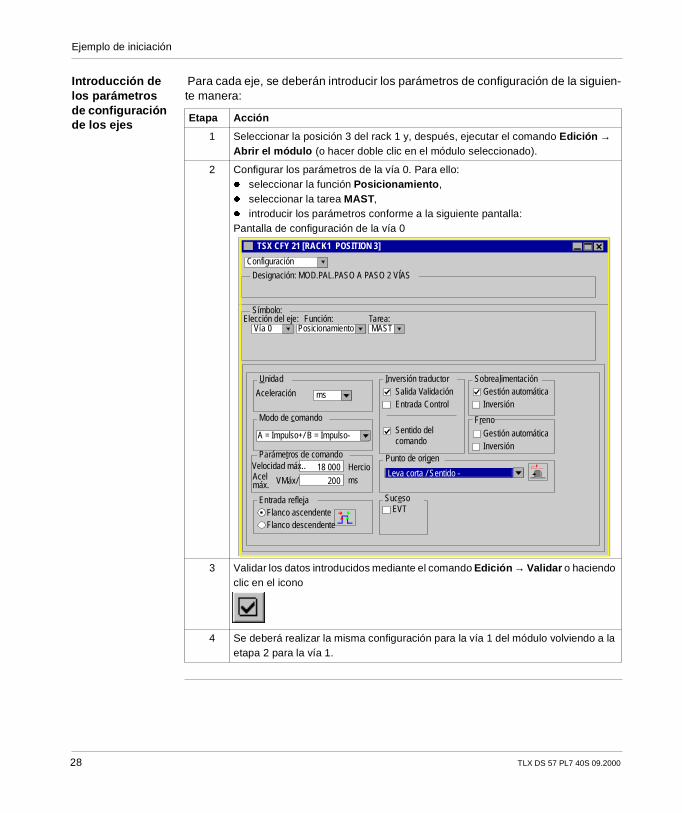
Introducción de los parámetros de configuración de los ejes
Para cada eje, se deberán introducir los parámetros de configuración de la siguien-te manera:
Etapa Acción
1 Seleccionar la posición 3 del rack 1 y, después, ejecutar el comando Edición → Abrir el módulo (o hacer doble clic en el módulo seleccionado).
2 Configurar los parámetros de la vía 0. Para ello:l seleccionar la función Posicionamiento,l seleccionar la tarea MAST,l introducir los parámetros conforme a la siguiente pantalla:Pantalla de configuración de la vía 0
3 Validar los datos introducidos mediante el comando Edición → Validar o haciendo clic en el icono
4 Se deberá realizar la misma configuración para la vía 1 del módulo volviendo a la etapa 2 para la vía 1.
TSX CFY 21 [RACK1 POSITION 3]
Configuración
Designación: MOD.PAL.PASO A PASO 2 VÍAS
Símbolo:
Vía 0 Posicionamiento MASTElección del eje: Función: Tarea:
Entrada refleja
Parámetros de comando
Modo de comando
Unidad Inversión traductor Sobrealimentación
Freno
Punto de origen
Suceso
Aceleración
Velocidad máx..Acelmáx.
Flanco ascendenteFlanco descendente
Hercioms
EVT
Salida ValidaciónEntrada Control
Sentido delcomando
Gestión automáticaInversión
Gestión automáticaInversión
A = Impulso+/ B = Impulso-
18 000
200VMáx/
ms
Leva corta / Sentido -
28 TLX DS 57 PL7 40S 09.2000
Ejemplo de iniciación
Ajuste del módulo TSX CFY
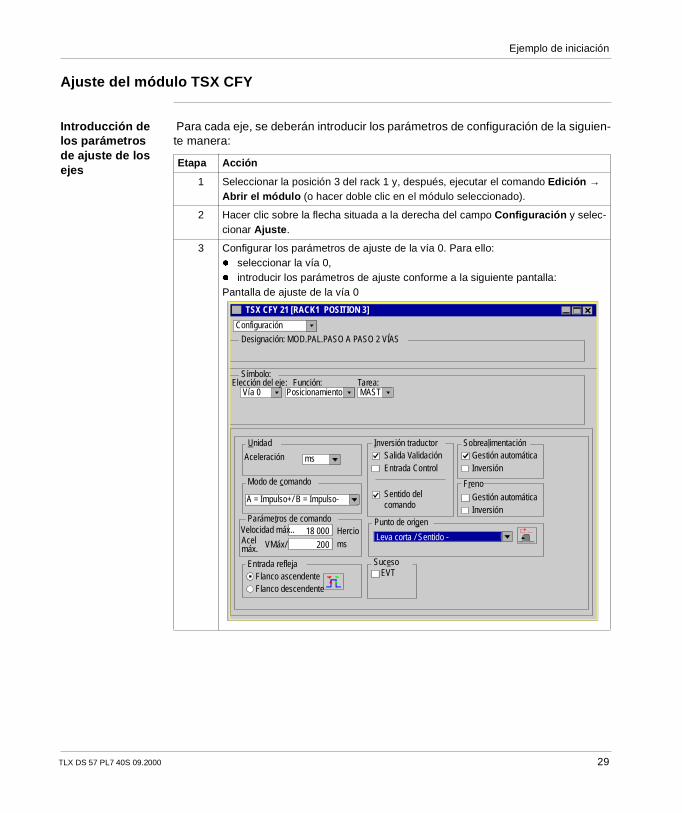
Introducción de los parámetros de ajuste de los ejes
Para cada eje, se deberán introducir los parámetros de configuración de la siguien-te manera:
Etapa Acción
1 Seleccionar la posición 3 del rack 1 y, después, ejecutar el comando Edición → Abrir el módulo (o hacer doble clic en el módulo seleccionado).
2 Hacer clic sobre la flecha situada a la derecha del campo Configuración y selec-cionar Ajuste .
3 Configurar los parámetros de ajuste de la vía 0. Para ello:l seleccionar la vía 0,l introducir los parámetros de ajuste conforme a la siguiente pantalla:Pantalla de ajuste de la vía 0
TSX CFY 21 [RACK1 POSITION 3]
Configuración
Designación: MOD.PAL.PASO A PASO 2 VÍAS
Símbolo:
Vía 0 Posicionamiento MASTElección del eje: Función: Tarea:
Entrada refleja
Parámetros de comando
Modo de comando
Unidad Inversión traductor Sobrealimentación
Freno
Punto de origen
Suceso
Aceleración
Velocidad máx..Acelmáx.
Flanco ascendenteFlanco descendente
Hercioms
EVT
Salida ValidaciónEntrada Control
Sentido delcomando
Gestión automáticaInversión
Gestión automáticaInversión
A = Impulso+/ B = Impulso-
18 000
200VMáx/
ms
Leva corta / Sentido -
TLX DS 57 PL7 40S 09.2000 29

Ejemplo de iniciación
4 Validar los datos introducidos mediante el comando Edición → Validar o haciendo clic en el icono
5 Se deberán realizar los mismos ajustes para la vía 1 del módulo y se retomará el proceso en la etapa 3 para la vía 1.
6 A continuación, validar la configuración global mediante el comando Edición → Validar o haciendo clic en el icono
Etapa Acción
30 TLX DS 57 PL7 40S 09.2000
Ejemplo de iniciación
Simbolización de las variables del ejemplo
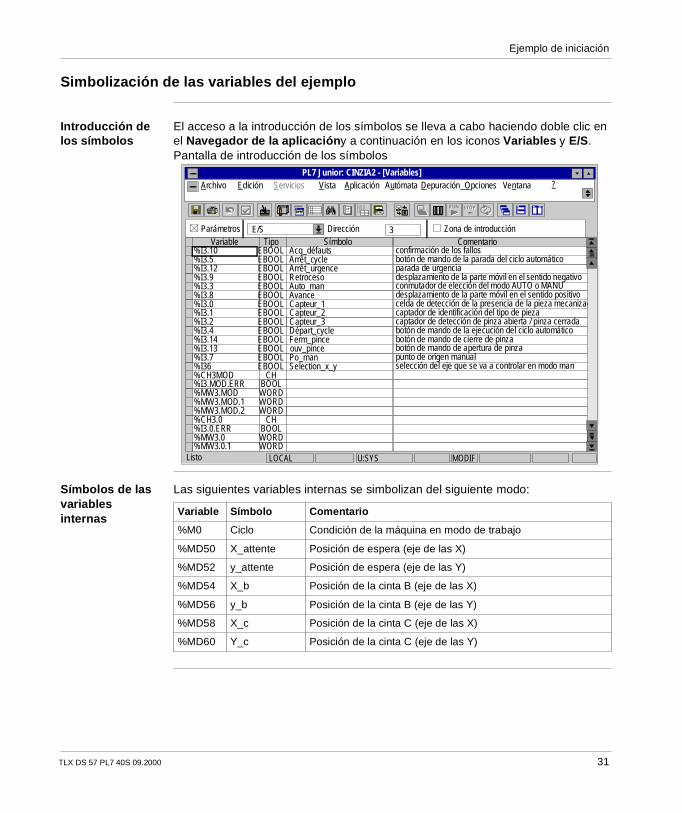
Introducción de los símbolos
El acceso a la introducción de los símbolos se lleva a cabo haciendo doble clic en el Navegador de la aplicación y a continuación en los iconos Variables y E/S.Pantalla de introducción de los símbolos
Símbolos de las variables internas
Las siguientes variables internas se simbolizan del siguiente modo:
%I3.10 EBOOL Acq_défauts confirmación de los fallosVariable Tipo Símbolo Comentario
%I3.12 EBOOL Arrêt_urgence parada de urgencia%I3.5 EBOOL Arrêt_cycle botón de mando de la parada del ciclo automático
%I3.3 EBOOL Auto_man conmutador de elección del modo AUTO o MANU%I3.9 EBOOL Retroceso desplazamiento de la parte móvil en el sentido negativo
%I3.0 EBOOL Capteur_1 celda de detección de la presencia de la pieza mecanizada%I3.8 EBOOL Avance desplazamiento de la parte móvil en el sentido positivo
%I3.2 EBOOL Capteur_3 captador de detección de pinza abierta / pinza cerrada%I3.1 EBOOL Capteur_2 captador de identificación del tipo de pieza
%I3.14 EBOOL Ferm_pince botón de mando de cierre de pinza%I3.4 EBOOL Départ_cycle botón de mando de la ejecución del ciclo automático
%I3.7 EBOOL Po_man punto de origen manual%I3.13 EBOOL ouv_pince botón de mando de apertura de pinza
%CH3MOD CH%I36 EBOOL Selection_x_y selección del eje que se va a controlar en modo man
%MW3.MOD WORD%I3.MOD.ERR BOOL
%MW3.MOD.2 WORD%MW3.MOD.1 WORD
%I3.0.ERR BOOL%CH3.0 CH
%MW3.0.1 WORD%MW3.0 WORD
PL7 Junior: CINZIA2 - [Variables]
RUNRUN STOPSTOP
Parámetros Dirección Zona de introducción3E/S
Archivo Edición Servicios Aplicación Autómata Depuración Opciones VentanaVista ?
LOCAL U:SYS MODIFListo
Variable Símbolo Comentario
%M0 Ciclo Condición de la máquina en modo de trabajo
%MD50 X_attente Posición de espera (eje de las X)
%MD52 y_attente Posición de espera (eje de las Y)
%MD54 X_b Posición de la cinta B (eje de las X)
%MD56 y_b Posición de la cinta B (eje de las Y)
%MD58 X_c Posición de la cinta C (eje de las X)
%MD60 Y_c Posición de la cinta C (eje de las Y)
TLX DS 57 PL7 40S 09.2000 31

Ejemplo de iniciación
Símbolos del módulo de entradas TON
El módulo de entradas TON se posiciona en el emplazamiento 3 del rack 0. Los sím-bolos son los siguiente:
Símbolos del módulo de salidas TON
El módulo de salidas TON se posiciona en el emplazamiento 4 del rack 0. Los sím-bolos son los siguientes:
Variable Símbolo Comentario
%I3.0 Capteur_1 Célula de detección de la presencia de una pieza fabricada.
%I3.1 Capteur_2 Captador de identificación del tipo de pieza (0 = tipo 2, 1 = tipo1)
%I3.2 Capteur_3 Captador de detección de pinza abierta / pinza cerrada
%I3.3 Auto_man Conmutador de elección del modo (0 = Auto, 1 = Manual)
%I3.4 Depart_cycle Botón que ejecuta el ciclo automático
%I3.5 Arret_cycle Botón que ejecuta la parada del ciclo automático
I%I3.6 Selection_x_y Selección del eje que se va a controlar en modo Manual (1 = X, 0 = Y)
%I3.7 Po_man Punto de origen manual
%I3.8 Avance (Desplazamiento de la parte móvil en sentido positivo
%I3.9 Retroceso Desplazamiento de la parte móvil en sentido negativo
%I3.10 Corfim_fallos Confirmación de los fallos
%I3.12 Parada_urgencia
Parada de urgencia
%I3.13 Apert_pinza Botón que abre la pinza
%I3.14 Cierr_pinza Botón de cierre de pinza
Variable Símbolo Comentario
%Q4.0 Pinza Comando accionador de apertura/cierre de pinza (0 = Apertu-ra, 1 = Cierre)
%Q4.1 Fallo Señalización de fallo
32 TLX DS 57 PL7 40S 09.2000

Ejemplo de iniciación
Símbolos del módulo de comando de ejes
El módulo de comando de ejes se posiciona en el emplazamiento 3 del rack 1. Los símbolos son los siguientes:
Variable Símbolo Variable Símbolo
%CH103.0 Eje_x %CH103.1 Eje_y
%I103.0 Next %I103.1 Next_y
%I103.0.1 Done %I103.1.1 Done_y
%I103.0.2 Error %I103.1.2 Error_y
%I103.0.3 Aceptar %I103.1.3 Ok_y
%I103.0.4 Hard_err_x %I103.1.4 Hard_err_y
%I103.0.5 Axis_error_x %I103.1.5 Axis_error_y
%I103.0.6 Ref_cmd_x %I103.1.6 Ref_cmd_y
%I103.0.9 At_point %I103.1.9 At_point_y
%I103.0.11 Conf_x %I103.1.11 Conf_y
%I103.0.12 Calib %I103.1.12 Calib_y
%I103.0.16 Mode_drive_off %I103.1.16 Mode_drive_off_y
%I103.0.17 Mode_dir_drive %I103.1.17 Mode_dir_drive_y
%I103.0.18 Modo_manual %I103.1.18 Modo_manual_y
%I103.0.19 Modo_auto %I103.1.19 Modo_auto_y
%I103.0.35 Varvalid_x %I103.1.35 Varvalid_y
%Q103.0 Dirdrive %Q103.1 Dirdrive_y
%Q103.0.1 Jog_p %Q103.1.1 Jog_p_y
%Q103.00.2 Jog_m %Q103.1.2 Jog_m_y
%Q103.00.3 Inc_p %Q103.1.3 Inc_p_y
%Q103.0.4 Inc_m %Q103.1.4 Inc_m_y
%Q103.0.5 Setrp %Q103.1.5 Setrp_y
%Q103.0.6 Rp_here %Q103.1.6 Rp_here_y
%Q103.0.9 Confirm_fallo %Q103.1.9 Confirm_fallo_y
%Q103.0.10 Enable %Q103.1.10 Enable_y
%Q103.0.11 Event_uc %Q103.1.11 Event_uc_y
%MD103.0.22 Posrp %MD103.1.22 Posrp_y
TLX DS 57 PL7 40S 09.2000 33

Ejemplo de iniciación
Constantes internas
La velocidad de la parte móvil que sigue los diversos ejes, se contiene en las cons-tantes internas. En el caso de 2 ejes independientes, los símbolos y los valores de estas constantes son los siguientes:
Variable Símbolo Valor Comentario
%KD0 Velocidad_p_o 5000 Velocidad de punto de origen que sigue los ejes X e Y
%KD4 Velocidad_x_espera 10000 Velocidad hacia la posición de espera del eje X
%KD6 Velocidad_y_espera 10000 Velocidad hacia la posición de espera del eje Y
%KD8 Velocidad_pos_a_x 15000 Velocidad hacia la posición de la cinta A del eje X
%KD10 Velocidad_pos_a_y 15000 Velocidad hacia la posición de la cinta A del eje Y
%KD12 Velocidad_pos_b_x 15000 Velocidad hacia la posición de la cinta B del eje X
%KD14 Velocidad_pos_b_y 15000 Velocidad hacia la posición de la cinta B del eje Y
%KD16 Velocidad_pos_c_x 12000 Velocidad hacia la posición de la cinta C del eje X
%KD18 Velocidad_pos_c_y 12000 Velocidad hacia la posición de la cinta C del eje Y
34 TLX DS 57 PL7 40S 09.2000
Ejemplo de iniciación
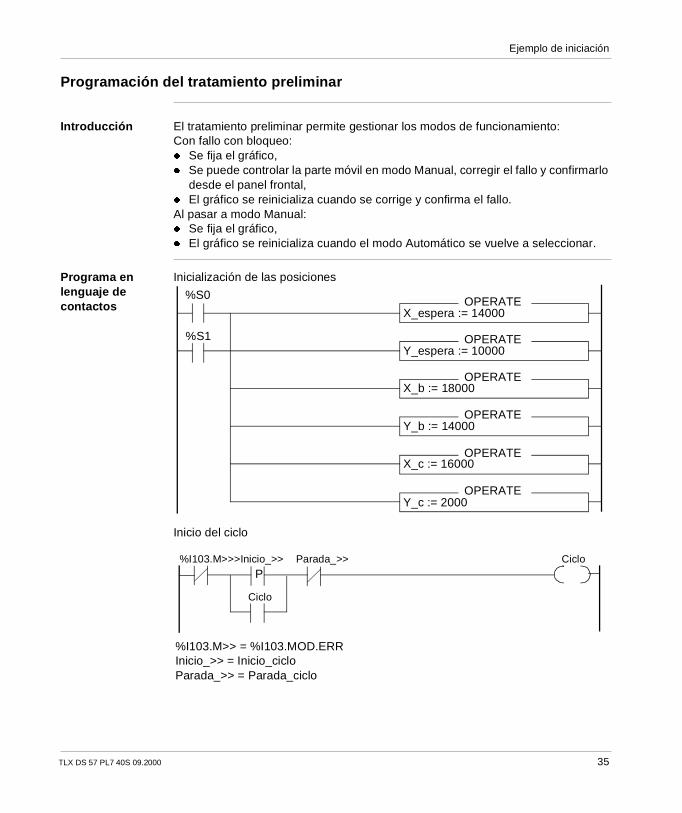
Programación del tratamiento preliminar
Introducción El tratamiento preliminar permite gestionar los modos de funcionamiento:Con fallo con bloqueo:l Se fija el gráfico,l Se puede controlar la parte móvil en modo Manual, corregir el fallo y confirmarlo
desde el panel frontal,l El gráfico se reinicializa cuando se corrige y confirma el fallo.Al pasar a modo Manual:l Se fija el gráfico,l El gráfico se reinicializa cuando el modo Automático se vuelve a seleccionar.
Programa en lenguaje de contactos
Inicialización de las posiciones
Inicio del ciclo
OPERATE
OPERATE
OPERATE
OPERATE
OPERATE
OPERATE
%S0
%S1
X_espera := 14000
Y_espera := 10000
X_b := 18000
Y_b := 14000
X_c := 16000
Y_c := 2000
P%I103.M>>>Inicio_>> Parada_>> Ciclo
Ciclo
%I103.M>> = %I103.MOD.ERRInicio_>> = Inicio_cicloParada_>> = Parada_ciclo
TLX DS 57 PL7 40S 09.2000 35

Ejemplo de iniciación
Validación de variador
Selección del modo automático
Selección del modo manual
Fijación del gráfico con fallo o al pasar a modo manual
S
S
%I103.M>> Error
Error_y
Enable
Enable_y
%I103.M>> = %I103.MOD.ERR
NOPERATE
OPERATE
Auto_man Varvalid_x
Varvalid_y
%QW103.0 := 3
%QW103.0 := 3
P
OPERATE
OPERATEAuto_man
%QW103.0 := 2
%QW103.0 := 2
S
S
Modo_>>
Modo_>>
Aceptar
Ok_y
%S23
%M1
Modo_>> = Modo_autoModo_>> = Modo_auto_y%M1 = Grafcet fijado
36 TLX DS 57 PL7 40S 09.2000

Ejemplo de iniciación
Reinicialización del gráfico
Señalización de los fallos
R
R
S
Ok Ok_y Modo_>> %M1 %S23
%S21
%M1
Modo_>>
Modo_>> = Modo_autoModo_>> = Modo_auto_y%M1 = Grafcet fijado
Aceptar %S6
Ok_y
Fallo
TLX DS 57 PL7 40S 09.2000 37
Ejemplo de iniciación
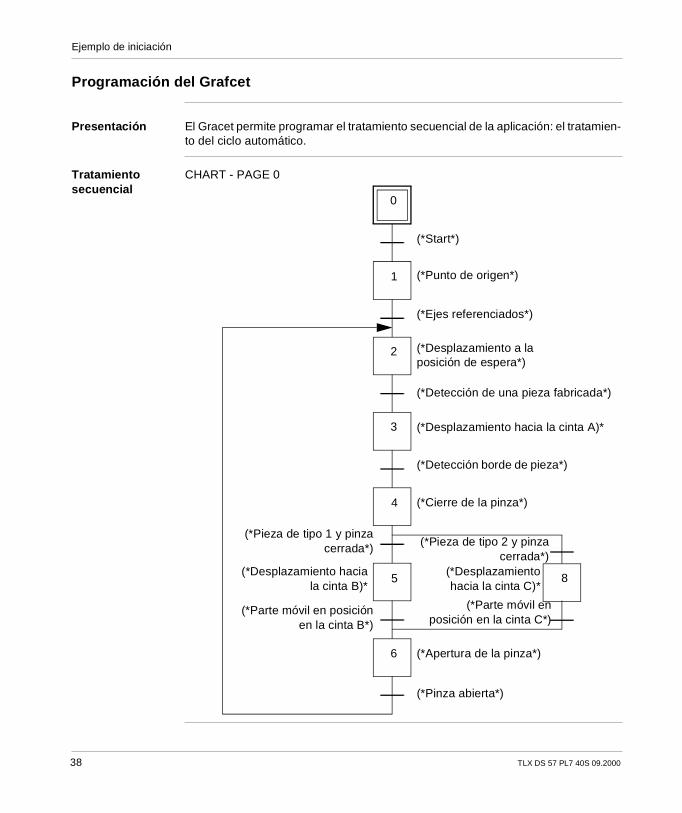
Programación del Grafcet
Presentación El Gracet permite programar el tratamiento secuencial de la aplicación: el tratamien-to del ciclo automático.
Tratamiento secuencial
CHART - PAGE 0
0
1
2
3
4
5
6
8
(*Start*)
(*Punto de origen*)
(*Ejes referenciados*)
(*Desplazamiento a la posición de espera*)
(*Detección de una pieza fabricada*)
(*Desplazamiento hacia la cinta A)*
(*Detección borde de pieza*)
(*Cierre de la pinza*)
(*Pieza de tipo 2 y pinzacerrada*)
(*Desplazamientohacia la cinta C)*
(*Desplazamiento haciala cinta B)*
(*Pieza de tipo 1 y pinzacerrada*)
(*Parte móvil en posiciónen la cinta B*)
(*Parte móvil enposición en la cinta C*)
(*Apertura de la pinza*)
(*Pinza abierta*)
38 TLX DS 57 PL7 40S 09.2000

Ejemplo de iniciación
Programación de las transiciones
Presentación Las transiciones diseñadas en el grafcet se programan del siguiente modo.
Etapa 0 -> 1 ! (*Vía X sin fallo, pinza abierta, conmutador Auto_man en Auto, inicio de ciclo, vía Y sin fallo y modo automático activo*)NOT Error AND NOT Capteur_3 AND NOT Auto_man AND Cycle AND NOT Error_y AND Mode_Auto
Etapa 1 -> 2 ! (*Test: ejes listos y referenciados*)Done AND Calib AND Done_y AND Calib_y
Etapa 2 -> 3 ! (*Parte móvil en posición de espera y pieza detectada en la cinta A*)Capteur_1 AND Cycle AND Next AND Next_y
Etapa 3 -> 4 ! (*Parte móvil en posición de toma de la pieza detectada en la cinta A*)At_point AND Next AND Next_y AND At_point_y
Etapa 4 -> 5 ! (*Pieza de tipo 1 y pinza cerrada*)Capteur_2 AND Capteur_3
Etapa 4 -> 8 ! (*Pieza de tipo 2 y pinza cerrada*)NOT Capteur_2 AND Capteur_3
Etapa 5 -> 6 ! (*Parte móvil en posición en la cinta B*)At_point AND Next AND Next_y AND At_point_y
Etapa 8 -> 6 ! (*Parte móvil en posición en la cinta C*)At_point AND Next AND Next_y AND At_point_y
Etapa 6 -> 2 ! (*Pinza abierta*)NOT Capteur_3 AND Cycle
TLX DS 57 PL7 40S 09.2000 39

Ejemplo de iniciación
Programación de las acciones
Presentación En el Grafcet se puede programar acciones para cada etapa. Hay tres posibles tipos de acciones: l en la activaciónl en continuol en la desactivaciónCuando el tipo de acción no está descrito para una etapa dada, quiere decir que no ha sido programado.
Etapa 1: Acción en la activación
! (*Punto de origen siguiendo los ejes X e Y*)SMOVE Axe_x (1, 90, 14, 0, Vitesse_p_o, 16#0000);SMOVE Axe_y (1, 90, 14, 0, Vitesse_p_o, 16#0000);
Etapa 2: Acción en la activación
! (*Desplazamiento a la posición de espera (Xatt, Yatt)*SMOVE Axe_x (2, 90, 9, X_attente, Vitesse_x_attente, 16#0000);SMOVE Axe_y (2, 90, 9, Y_attente, Vitesse_y_attente, 16#0000);
Etapa 3: Acción en la activación
! (*Desplazamiento hacia la cinta A)*SMOVE Axe_x (3, 90, 10, 19500, Vitesse_pos_a_x, 16#0000);SMOVE Axe_y (3, 90, 10, 19500, Vitesse_pos_a_y, 16#0000);
Etapa 4: Acción continua
! (*Cierre de la pinza*)SET Pince;
Etapa 5: Acción en la activación
! (*Desplazamiento hacia la cinta B)*SMOVE Axe_x (4, 90, 9, X_b, Vitesse_pos_b_x, 16#0000);SMOVE Axe_y (4, 90, 9, Y_b, Vitesse_pos_b_y, 16#0000);
Etapa 8: Acción en la activación
! (*Desplazamiento hacia la cinta C)*SMOVE Axe_x (5, 90, 9, X_c, Vitesse_pos_c_x, 16#0000);SMOVE Axe_y (5, 90, 9, Y_c, Vitesse_pos_c_y, 16#0000);
Etapa 6: Acción continua
! (*Apertura de la pinza*)RESET Pince;
40 TLX DS 57 PL7 40S 09.2000
Ejemplo de iniciación
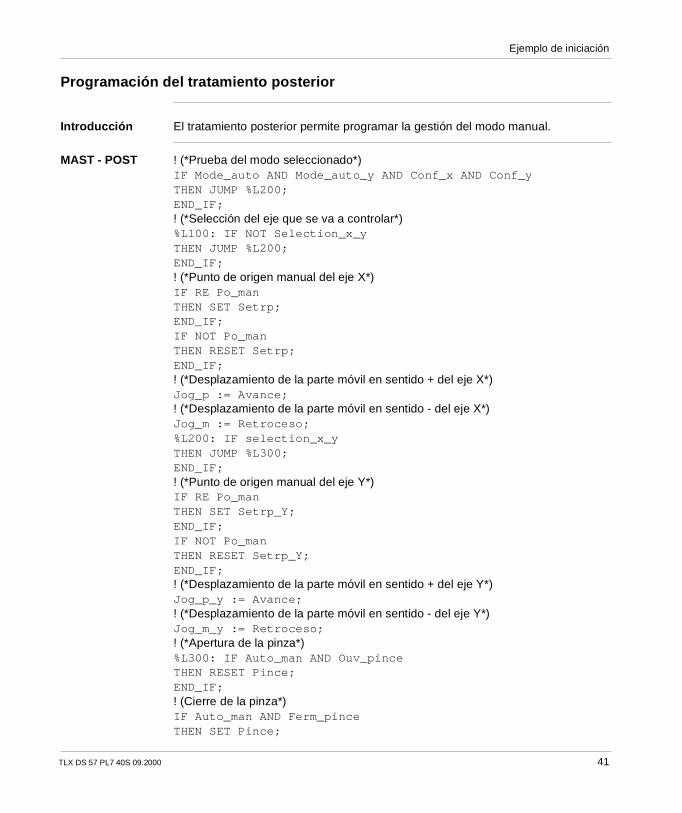
Programación del tratamiento posterior
Introducción El tratamiento posterior permite programar la gestión del modo manual.
MAST - POST ! (*Prueba del modo seleccionado*)IF Mode_auto AND Mode_auto_y AND Conf_x AND Conf_yTHEN JUMP %L200;END_IF;! (*Selección del eje que se va a controlar*)%L100: IF NOT Selection_x_yTHEN JUMP %L200;END_IF;! (*Punto de origen manual del eje X*)IF RE Po_manTHEN SET Setrp;END_IF;IF NOT Po_manTHEN RESET Setrp;END_IF;! (*Desplazamiento de la parte móvil en sentido + del eje X*)Jog_p := Avance;! (*Desplazamiento de la parte móvil en sentido - del eje X*)Jog_m := Retroceso;%L200: IF selection_x_yTHEN JUMP %L300;END_IF;! (*Punto de origen manual del eje Y*)IF RE Po_manTHEN SET Setrp_Y;END_IF;IF NOT Po_manTHEN RESET Setrp_Y;END_IF;! (*Desplazamiento de la parte móvil en sentido + del eje Y*)Jog_p_y := Avance;! (*Desplazamiento de la parte móvil en sentido - del eje Y*)Jog_m_y := Retroceso;! (*Apertura de la pinza*)%L300: IF Auto_man AND Ouv_pinceTHEN RESET Pince;END_IF;! (Cierre de la pinza*)IF Auto_man AND Ferm_pinceTHEN SET Pince;
TLX DS 57 PL7 40S 09.2000 41

Ejemplo de iniciación
END_IF;! (*Confirmación de los fallos*)Ack_def := Ack_def_y := Acq_defauts;%L999:
42 TLX DS 57 PL7 40S 09.2000
Ejemplo de iniciación
Transferencia del programa
Procedimiento para transferir un programa
Después de haber configurado la aplicación y haber introducido el programa, éstos se deben transferir a la memoria del procesador del autómata, siguiendo el proceso explicado a continuación:
Etapa Acción
1 Conectar el terminal al autómata mediante el comando AP → Conectar.
2 Activar el comando AP → Transferir programa.
3 Elegir la opción Consola -> autómata .
4 Validar la transferencia.
TLX DS 57 PL7 40S 09.2000 43
Ejemplo de iniciación
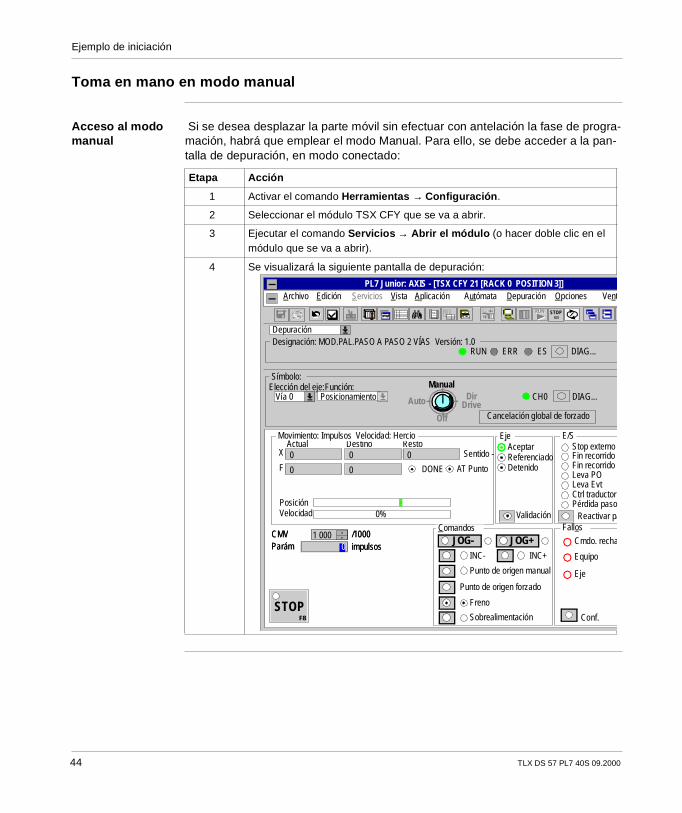
Toma en mano en modo manual
Acceso al modo manual
Si se desea desplazar la parte móvil sin efectuar con antelación la fase de progra-mación, habrá que emplear el modo Manual. Para ello, se debe acceder a la pan-talla de depuración, en modo conectado:
Etapa Acción
1 Activar el comando Herramientas → Configuración .
2 Seleccionar el módulo TSX CFY que se va a abrir.
3 Ejecutar el comando Servicios → Abrir el módulo (o hacer doble clic en el módulo que se va a abrir).
4 Se visualizará la siguiente pantalla de depuración:
0
0
0
0
0
DONE
Stop externoFin recorrido +Fin recorrido -Leva PO
Sentido -X
F
Validación
Destino Resto Movimiento: Impulsos Velocidad: Hercio E/S
Actual
F8
ReferenciadoDetenido
EjeAceptar
AT Punto
PosiciónVelocidad 0%
STOP
PL7 Junior: AXIS - [TSX CFY 21 [RACK 0 POSITION 3]]
RUNRUN
Archivo Edición Servicios Aplicación Autómata Depuración Opciones VentVista
Depuración Designación: MOD.PAL.PASO A PASO 2 VÍAS Versión: 1.0
Símbolo:Elección del eje:Función:
PosicionamientoVía 0
Cancelación global de forzado
CH0 DIAG...Auto
Off
ERRRUN ES DIAG...
DirDrive
Manual
STOP
Cmdo. recha
Equipo
Eje
Fallos
INC-
Punto de origen manual
Punto de origen forzado
Conf.
Comandos
Freno
INC+
JOG- JOG+
Sobrealimentación
Leva EvtCtrl traductorPérdida paso
Reactivar pa
1 000 /1000CMV0Parám impulsos
1 000 /1000CMV0Parám impulsos
44 TLX DS 57 PL7 40S 09.2000
Ejemplo de iniciación
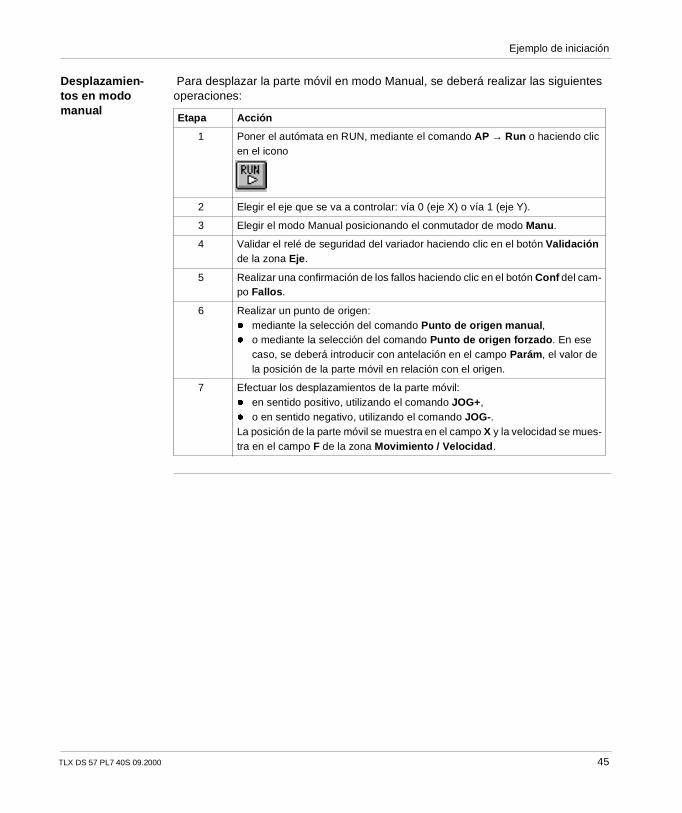
Desplazamien-tos en modo manual
Para desplazar la parte móvil en modo Manual, se deberá realizar las siguientes operaciones:
Etapa Acción
1 Poner el autómata en RUN, mediante el comando AP → Run o haciendo clic en el icono
2 Elegir el eje que se va a controlar: vía 0 (eje X) o vía 1 (eje Y).
3 Elegir el modo Manual posicionando el conmutador de modo Manu.
4 Validar el relé de seguridad del variador haciendo clic en el botón Validación de la zona Eje.
5 Realizar una confirmación de los fallos haciendo clic en el botón Conf del cam-po Fallos.
6 Realizar un punto de origen:l mediante la selección del comando Punto de origen manual,l o mediante la selección del comando Punto de origen forzado. En ese
caso, se deberá introducir con antelación en el campo Parám , el valor de la posición de la parte móvil en relación con el origen.
7 Efectuar los desplazamientos de la parte móvil:l en sentido positivo, utilizando el comando JOG+,l o en sentido negativo, utilizando el comando JOG-.La posición de la parte móvil se muestra en el campo X y la velocidad se mues-tra en el campo F de la zona Movimiento / Velocidad.
TLX DS 57 PL7 40S 09.2000 45

Ejemplo de iniciación
Depuración
Procedimiento de depuración
La depuración del programa se puede efectuar procediendo del siguiente modo:
Etapa Acción
1 Poner el autómata en RUN.
2 Mostrar la pantalla de depuración del módulo TSX CFY.
3 Visualizar simultáneamente la pantalla Grafcet para seguir la evolución del tratamiento secuencial.La siguiente pantalla es a la vez la pantalla de depuración y la de Grafcet:
4 Iniciar la ejecución del programa pulsando el botón Depart_cycle del panel frontal.
52 2820
500 0000
447 718DONE
Stop externoFin recorrido +Fin recorrido -Leva PO
Sentido -XF
Validación
Destino Resto Movimiento: Impulsos Velocidad: Hercio E/S
Actual
F8
Referen-ciado
Detenido
EjeAceptar
AT Punto
PosiciónVelocidad 0%
STOP
CONNECTE U:SYSRUNParámetro: [-16 777 216, 16 777 215]
PL7 Junior: AXIS - [TSX CFY 21 [RACK 0 POSITION 3]]
RUNRUN
Archivo Edición Servicios Aplicación Autómata Depuración Opciones VentanaVista ?
Depuración Designación: MOD.PAL.PASO A PASO 2 VÍAS Versión: 1.0
Símbolo:Elección del eje:
Función:Posicionamiento
Vía 0
Cancelación global de forzado
CH0 DIAG...Auto
Off
ERRRUN DIAG...
DirDrive
Manual
STOP
Cmdo. rechazadoEquipo
Eje
Fallos
INC -Punto de origen manual
Punto de origen forzado
Conf.
Comandos
Freno
INC +
JOG - JOG +
Sobrealimentación
Leva EvtCtrl traductorPérdida paso
Reactivar paso
1 000 /CMV0Parám impulsos
1 000 /1000CMV0Parám impulsos
ES
6
PL7 Junior: CINZIA2
0
1
2
3
GRAFCET: MAST - CHART
(*Desplazamiento hacia positi>>
(*Detección de una pieza m>>(*Desplazamiento hacia el ta>>
(*Detección de borde de piez>>
(*Ejes referenciados*)(*Punto de origen*)
(*Inicio*)
Archivo Edición ServiciosVista Aplicación Autómata Depuración Opciones Ventana ?
46 TLX DS 57 PL7 40S 09.2000

Ejemplo de iniciación
Archivado
Procedimiento de archivado
Al terminar la depuración se debe proceder al archivado. Para ello:
Etapa Acción
1 Si durante la depuración se han modificado parámetros, activar el comando Servicios → Guardar los parámetros .
2 Transferir la aplicación del procesador del autómata hacia el disco duro:l activar el comando AP → Transferir el programa opción Autómata ->
consola ,l activar el comando Archivo → Guardar como ,l poner un nombre a la aplicación,l validar.
TLX DS 57 PL7 40S 09.2000 47

Ejemplo de iniciación
48 TLX DS 57 PL7 40S 09.2000
TLX DS 57 PL7 40S 09.2000
4
Configuración del comando de ejes paso a pasoPresentación
Objeto de este capítulo
Este capítulo describe las pantallas de configuración de los módulos TSX CFY.
Contenido Este capítulo contiene los siguiente apartados:
Apartado Página
Configuración de los módulos de comando de ejes 50
Declaración de los módulos de comando de ejes 51
Acceso a la pantalla de configuración de los parámetros 54
Configuración de las unidades de usuario 56
Configuración del modo de comando del traductor 58
Configuración de los parámetros de comando 60
Configuración de la inversión del traductor 62
Configuración de la sobrealimentación del traductor 63
Configuración del freno del motor paso a paso 64
Configuración de la tarea de sucesos 65
Configuración del punto de origen 66
Validación de los parámetros de configuración 71
49

Configuración
Configuración de los módulos de comando de ejes
Introducción Antes de crear un programa de aplicación, se debe definir el contexto de funciona-miento físico y de programa en el que se va a ejecutar: tipo de procesador TSX Premium, módulos de entradas/salidas utilizados. Además, la programación de los módulos de comando de ejes requiere que se de-finan los parámetros de configuración de los ejes utilizados. Para ello, el programa PL7 ofrece un editor de configuración que permite realizar fácilmente estas opera-ciones.El editor de configuración también da acceso a los parámetros de ajuste de los ejes y a las funciones de depuración en funcionamiento conectado.
Acceso al editor de configuración
El Navegador de la Aplicación permite el acceso al editor de configuración. Para ello:
Etapa Acción
1 Abrir la carpeta Estación (hacer doble clic en el icono o en su vínculo).
2 Abrir la carpeta Configuración (hacer doble clic en el icono o en su vínculo).
3 Hacer doble clic en el icono Configuración del equipo
4 Si la ventana del Navegador de la Aplicación no se encuentra en la pantalla:l desplegar el menú Herramientas y activar el comando Navegador de la
Aplicación ,l en la barra de herramientas, hacer clic en el icono del Navegador de la Apli-
cación:
Navegador de la Aplicación
STATIONConfiguración
Configuración del programaPrograma
Tarea MastSucesos
Tipos DFBVariablesTablas de animaciónCarpetaPantallas de explotación
Vista Estructural
Configuración del equipo
50 TLX DS 57 PL7 40S 09.2000
Configuración
Declaración de los módulos de comando de ejes
Presentación Esta operación consiste en declarar los módulos de comando de ejes en la configu-ración del autómata.
TLX DS 57 PL7 40S 09.2000 51

Configuración
Añadir un módulo
Para añadir un módulo de comando de ejes en la configuración del autómata, pro-ceder del siguiente modo:
Etapa Acción
1 Elegir el rack en el que se desea implantar el módulo de comando de ejes ha-ciendo clic en el rack correspondiente.
2 En el rack, seleccionar y validar la posición en la que se desea implantar el módulo TSX CFY haciendo doble clic sobre ella.El siguiente cuadro de diálogo permite añadir el módulo a la configuración:
3 Seleccionar Movimiento en el campo Familia.
4 Seleccionar la referencia del módulo (TSX CFY) en el campo Módulo .
5 Validar con Aceptar .
6 Después de la validación, el módulo se declara en su posición.
Agregar un móduloMódulo:
Aceptar
Cancelar
Familia:Fun. analógica1.5Comunicación1.5Contaje1.5Remote BusX1.0Movimiento1.5Pesaje1.5Simulation1.0Todo o Nada1.5
TSX CAY 21 MOD.CDO EJE 2 VIASTSX CAY 22 MOD.CDO AJE 2 VIASTSX CAY 33 MOD.CDO AJE 3 VIASTSX CAY 41 MOD.CDO AJE 4 VIASTSX CAY 42 MOD.CDO AJE 4 VIASTSX CFY 11 MOD.MOT.PASOAPAO 1 VIATSX CFY 21 MOD.MOT.PASOAPAO 2 VIAS
Configuración
TSX 57203 XMWI XTI..
0 2 3 4 5 6
0
PSY2600
TSX57203
DEY32D2K
DSY32T2K
2 3 4 5 6
1
CFY21
1
PSY5500
52 TLX DS 57 PL7 40S 09.2000

Configuración
Eliminar un módulo
Para eliminar un módulo de su posición:l seleccionarlo haciendo doble clic,l pulsar la tecla Supr, que muestra un cuadro de diálogo,l Confirmar la eliminación del módulo.
Desplazar un módulo
Para desplazar un módulo de una posición a otra:l seleccionarlo haciendo doble clic,l activar el comando Edición → Desplazar un módulo ,l Fijar la posición de destino.También se puede:l seleccionar el módulo con ayuda del ratón,l desplazar el módulo hacia la posición de destino sin soltar el botón izquierdo del
ratón (Drag and drop).
TLX DS 57 PL7 40S 09.2000 53
Configuración
Acceso a la pantalla de configuración de los parámetros
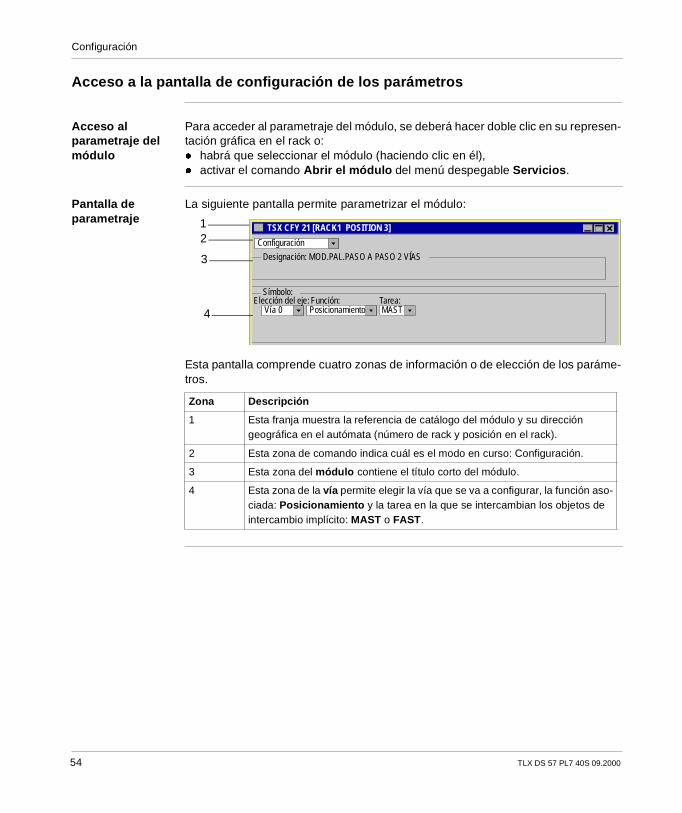
Acceso al parametraje del módulo
Para acceder al parametraje del módulo, se deberá hacer doble clic en su represen-tación gráfica en el rack o: l habrá que seleccionar el módulo (haciendo clic en él),l activar el comando Abrir el módulo del menú despegable Servicios.
Pantalla de parametraje
La siguiente pantalla permite parametrizar el módulo:
Esta pantalla comprende cuatro zonas de información o de elección de los paráme-tros.
Zona Descripción
1 Esta franja muestra la referencia de catálogo del módulo y su dirección geográfica en el autómata (número de rack y posición en el rack).
2 Esta zona de comando indica cuál es el modo en curso: Configuración.
3 Esta zona del módulo contiene el título corto del módulo.
4 Esta zona de la vía permite elegir la vía que se va a configurar, la función aso-ciada: Posicionamiento y la tarea en la que se intercambian los objetos de intercambio implícito: MAST o FAST.
TSX CFY 21 [RACK1 POSITION 3]
Configuración
Designación: MOD.PAL.PASO A PASO 2 VÍAS
Símbolo:
Vía 0 Posicionamiento MASTElección del eje: Función: Tarea:
12
3
4
54 TLX DS 57 PL7 40S 09.2000

Configuración
Zona de introducción de los parámetros de configuración de la vía
La parte inferior de la pantalla da acceso a la introducción de los parámetros.
Para visualizar toda la zona de los parámetros de configuración, se deberán activar los comandos Ver → Zona del módulo o Ver → Zona de vía (también se podrán utilizar estos comandos para restituir las zonas).
Nota: Para cada parámetro, los límites se muestran en la barra de estado.
TSX CFY 21 [RACK1 POSITION 3]
Configuración
Designación: MOD.PAL.PASO A PASO 2 VÍAS
Símbolo:
Vía 0 Posicionamiento MASTElección del eje: Función: Tarea:
Leva corta / Sentido -
Entrada refleja
Parámetros de comando
Modo de comando
Unidad Inversión traductor Sobrealimentación
Freno
Punto de origen
Suceso
Aceleración
Velocidad máx..Acelmáx.
Flanco ascendenteFlanco descendente
Hercioms
EVT
Salida ValidaciónEntrada Control
Sentido delcomando
Gestión automáticaInversión
Gestión automáticaInversión
A = Impulso+/ B = Impulso-
18 000
200VMáx/
ms
TLX DS 57 PL7 40S 09.2000 55
Configuración
Configuración de las unidades de usuario
Presentación Los desplazamientos y las posiciones siempre se expresan en número de impulsos o incrementos. Las velocidades siempre se expresan en impulsos por segundo (Hercio).
Menú de elección de las unidades
El menú de elección de las unidades es el siguiente.
Hercios/sHercios/sms
Unidad
Aceleración
56 TLX DS 57 PL7 40S 09.2000

Configuración
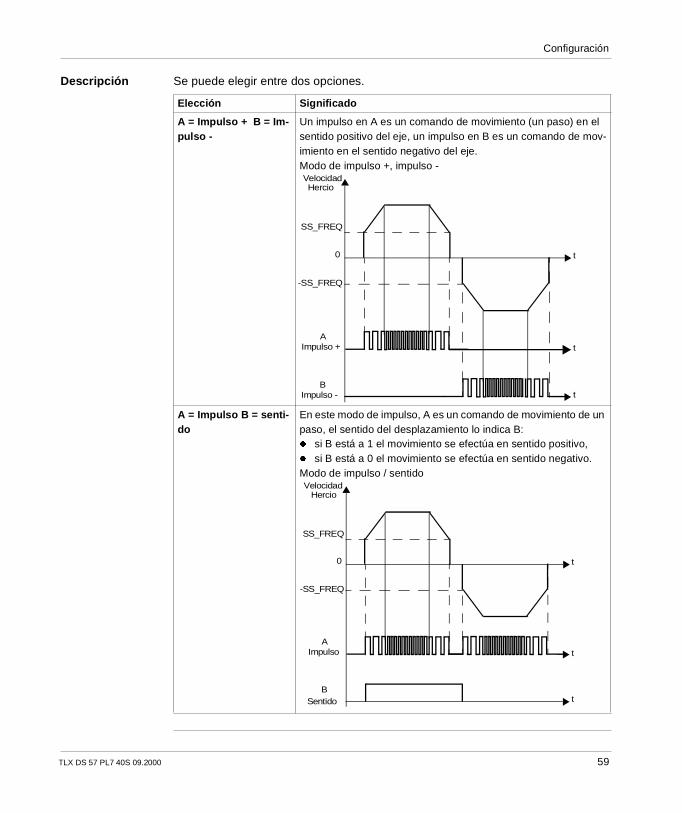
Descripción Se puede elegir entre dos opciones.
Unidad Significado
Hercio/s Cuando se ha validado la elección, se hablará de la pendiente de aceleración y deceleración de la parte móvil.Aceleración en Hercio/s: es igual a la pendiente de la velocidad, dF/dt
ms Cuando se ha validado la elección, se hablará de la duración de aceleración y deceleración de la parte móvil en milésimas de segundo.Aceleración en ms: es igual al tiempo de aceleración para que la velocidad pase de SS_FREQ a la velocidad máxima
t(s)0
F(Hercio)
F
t
SS_FREQ
t(ms)0
F (Hercio)
Fmax
T_ACC
SS_FREQ
TLX DS 57 PL7 40S 09.2000 57

Configuración
Configuración del modo de comando del traductor
Presentación La consigna de velocidad se envía al traductor para dirigir el motor de paso a paso. Esto permite determinar la manera en que se transmite esta información.
Menú de elección del modo de comando
El menú de elección del modo de comando en el traductor es el siguiente.
Modo de comando
A = Impulso+/ B = Impulso-A = Impulso+/ B = Impulso-A = impulso / B = Sentido
58 TLX DS 57 PL7 40S 09.2000
Configuración
Descripción Se puede elegir entre dos opciones.
Elección Significado
A = Impulso + B = Im-pulso -
Un impulso en A es un comando de movimiento (un paso) en el sentido positivo del eje, un impulso en B es un comando de mov-imiento en el sentido negativo del eje.Modo de impulso +, impulso -
A = Impulso B = senti-do
En este modo de impulso, A es un comando de movimiento de un paso, el sentido del desplazamiento lo indica B:l si B está a 1 el movimiento se efectúa en sentido positivo,l si B está a 0 el movimiento se efectúa en sentido negativo.Modo de impulso / sentido
SS_FREQ
0
-SS_FREQ
AImpulso +
BImpulso -
VelocidadHercio
t
t
t
SS_FREQ
0
-SS_FREQ
AImpulso
B
VelocidadHercio
t
t
tSentido
TLX DS 57 PL7 40S 09.2000 59
Configuración
Configuración de los parámetros de comando
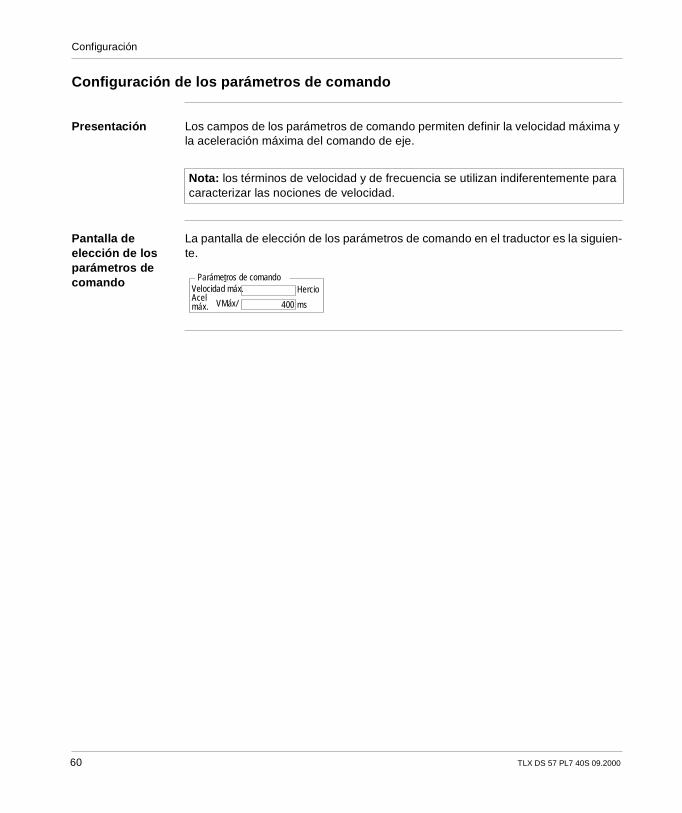
Presentación Los campos de los parámetros de comando permiten definir la velocidad máxima y la aceleración máxima del comando de eje.
Pantalla de elección de los parámetros de comando
La pantalla de elección de los parámetros de comando en el traductor es la siguien-te.
Nota: los términos de velocidad y de frecuencia se utilizan indiferentemente para caracterizar las nociones de velocidad.
Parámetros de comandoVelocidad máx. Hercio
msAcelmáx. VMáx/ 400
60 TLX DS 57 PL7 40S 09.2000

Configuración
Descripción Se deben indicar dos campos.
Elección Significado
Velocidad máx La velocidad máxima (frecuencia) es el resultado de la función del conjunto de traductor - motor - parte móvil. El circuito de generación de impulsos a una resolución de 1024 puntos en la dinámica de frecuencia (frecuencia nula comprendi-da).La elección de una velocidad máx influye en la resolución frecuen-cial de la vía. La siguiente lista da la resolución frecuencial (Fre-cuencia mínima) para un intervalo dado de frecuencia máxima:l [1 Hz,936 Hz] frecuencia mínima 0.92 Hzl [937 Hz,1873 Hz] frecuencia mínima 1.83 Hzl [1874 Hz,4682 Hz] frecuencia mínima 4.58 Hzl [4683 Hz,9365 Hz] frecuencia mínima 9.16 Hzl [9366 Hz,46829 Hz] frecuencia mínima 45.78 Hzl [46830 Hz,93658 Hz] frecuencia mínima 91.55 Hzl [93659 Hz,187316 Hz] frecuencia mínima 183.11 HzEjemplo: para una frecuencia máxima de 20 KHz, la resolución (Fmin) es de 45.78 Hz.
Acel. máx. La aceleración efectiva del eje, que se define en el ajuste, siempre debe ser inferior o igual a la aceleración máxima definida en la configuración.Los módulos TSX CFY 11 y 21 son capaces de modificar la pen-diente de aceleración o deceleración cada 5 ms. La resolución dinámica es de 63 puntos, lo que quiere decir que, si la unidad de aceleración elegida es el Hercio/s, y en un intervalo dado de ve-locidad máxima, la aceleración puede ser de 1 a 63 veces la acel-eración mínima. La siguiente lista ofrece las aceleraciones mínimas autorizadas para un intervalo de velocidad dado: l [1 Hz,936 Hz] aceleración mínima 183 Hz/sl [937 Hz,1873 Hz] aceleración mínima 366 Hz/sl [1874 Hz,4682 Hz] aceleración mínima 916 Hz/sl [4683 Hz,9365 Hz] aceleración mínima 1831 Hz/sl [9366 Hz,46829 Hz] aceleración mínima 9155 Hz/sl [46830 Hz,93658 Hz] aceleración mínima 18311 Hz/sl [93659 Hz,187316 Hz] aceleración mínima 36621 Hz/sCuando la aceleración se da en ms, la aceleración máxima cor-responde al tiempo mínimo de aceleración para alcanzar la ve-locidad máxima partiendo de la frecuencia de arranque y parada (SS_FREQ).
TLX DS 57 PL7 40S 09.2000 61
Configuración
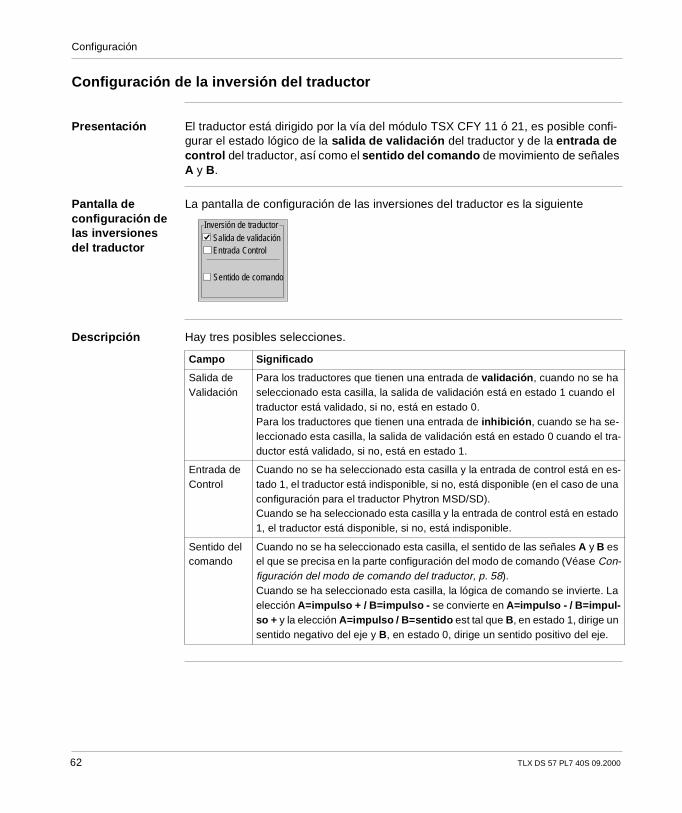
Configuración de la inversión del traductor
Presentación El traductor está dirigido por la vía del módulo TSX CFY 11 ó 21, es posible confi-gurar el estado lógico de la salida de validación del traductor y de la entrada de control del traductor, así como el sentido del comando de movimiento de señales A y B.
Pantalla de configuración de las inversiones del traductor
La pantalla de configuración de las inversiones del traductor es la siguiente
Descripción Hay tres posibles selecciones.
Inversión de traductorSalida de validaciónEntrada Control
Sentido de comando
Campo Significado
Salida de Validación
Para los traductores que tienen una entrada de validación , cuando no se ha seleccionado esta casilla, la salida de validación está en estado 1 cuando el traductor está validado, si no, está en estado 0.Para los traductores que tienen una entrada de inhibición , cuando se ha se-leccionado esta casilla, la salida de validación está en estado 0 cuando el tra-ductor está validado, si no, está en estado 1.
Entrada de Control
Cuando no se ha seleccionado esta casilla y la entrada de control está en es-tado 1, el traductor está indisponible, si no, está disponible (en el caso de una configuración para el traductor Phytron MSD/SD).Cuando se ha seleccionado esta casilla y la entrada de control está en estado 1, el traductor está disponible, si no, está indisponible.
Sentido del comando
Cuando no se ha seleccionado esta casilla, el sentido de las señales A y B es el que se precisa en la parte configuración del modo de comando (Véase Con-figuración del modo de comando del traductor, p. 58).Cuando se ha seleccionado esta casilla, la lógica de comando se invierte. La elección A=impulso + / B=impulso - se convierte en A=impulso - / B=impul-so + y la elección A=impulso / B=sentido est tal que B, en estado 1, dirige un sentido negativo del eje y B, en estado 0, dirige un sentido positivo del eje.
62 TLX DS 57 PL7 40S 09.2000

Configuración
Configuración de la sobrealimentación del traductor
Presentación Algunos traductores poseen una entrada de sobrealimentación que puede configu-rarse en los TSX CFY 11 y 21.
Pantalla de configuración de la sobrealimenta-ción.
La pantalla de configuración de la sobrealimentación del traductor es la siguiente.
Descripción Hay dos posibles selecciones.
SobrealimentaciónGestión automáticaInversión
Campo Significado
Gestión au-tomática
Para los traductores que poseen una entrada de sobrealimentación , cuando no se ha seleccionado esta casilla, la sobrealimentación del traductor la dirige el objeto %Qxy.i.14 BOOST (Véase Los objetos de lenguaje de la función es-pecífica de comando de ejes de paso a paso, p. 175). AVISO: el comando BOOST permanece activo en gestión automática, si se selecciona la opción de Gestión automática y es importante prohibir la utilización de este comando para evitar cualquier problema.Para los traductores que poseen una entrada de sobrealimentación , cuando se selecciona esta casilla, la sobrealimentación del traductor se activa au-tomáticamente en la fase de aceleración de deceleración de la parte móvil.
Inversión Cuando no se ha seleccionado esta casilla, la sobrealimentación del traductor está activa cuando la salida de sobrealimentación está a 1.Cuando se selecciona esta casilla, la sobrealimentación del traductor está ac-tiva cuando la salida de sobrealimentación está a 0.
TLX DS 57 PL7 40S 09.2000 63
Configuración
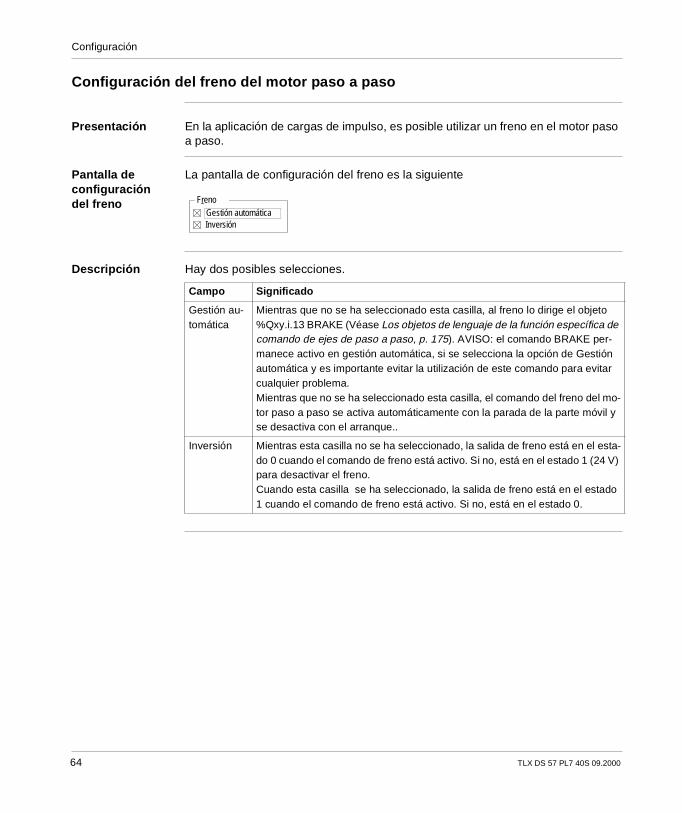
Configuración del freno del motor paso a paso
Presentación En la aplicación de cargas de impulso, es posible utilizar un freno en el motor paso a paso.
Pantalla de configuración del freno
La pantalla de configuración del freno es la siguiente
Descripción Hay dos posibles selecciones.
FrenoGestión automáticaInversión
Campo Significado
Gestión au-tomática
Mientras que no se ha seleccionado esta casilla, al freno lo dirige el objeto %Qxy.i.13 BRAKE (Véase Los objetos de lenguaje de la función específica de comando de ejes de paso a paso, p. 175). AVISO: el comando BRAKE per-manece activo en gestión automática, si se selecciona la opción de Gestión automática y es importante evitar la utilización de este comando para evitar cualquier problema.Mientras que no se ha seleccionado esta casilla, el comando del freno del mo-tor paso a paso se activa automáticamente con la parada de la parte móvil y se desactiva con el arranque..
Inversión Mientras esta casilla no se ha seleccionado, la salida de freno está en el esta-do 0 cuando el comando de freno está activo. Si no, está en el estado 1 (24 V) para desactivar el freno.Cuando esta casilla se ha seleccionado, la salida de freno está en el estado 1 cuando el comando de freno está activo. Si no, está en el estado 0.
64 TLX DS 57 PL7 40S 09.2000
Configuración
Configuración de la tarea de sucesos
Presentación Cuando se desea efectuar un tratamiento complementario que utilice la entrada re-fleja, es necesario configurar una tarea de sucesos asociada a la vía de comando de eje.
Pantalla de configuración de sucesos
La pantalla de configuración de la tarea de sucesos es la siguiente.
Descripción Se deben indicar dos campos.
SucesoEVT
2
Campo Significado
Evt Cuando se selecciona esta casilla, esto significa que se desea asociar una tar-ea de sucesos a la vía de comando de eje.
Número de la tarea
Esta cifra indica el número de la tarea de sucesos que se vinculará a la vía de comando de eje. Este número está comprendido entre 0 y 31 para los TSX 57-1• y entre 0 y 63 para los TSX 57-2••, TSX 57-3•• y TSX 57-4••.
TLX DS 57 PL7 40S 09.2000 65
Configuración
Configuración del punto de origen
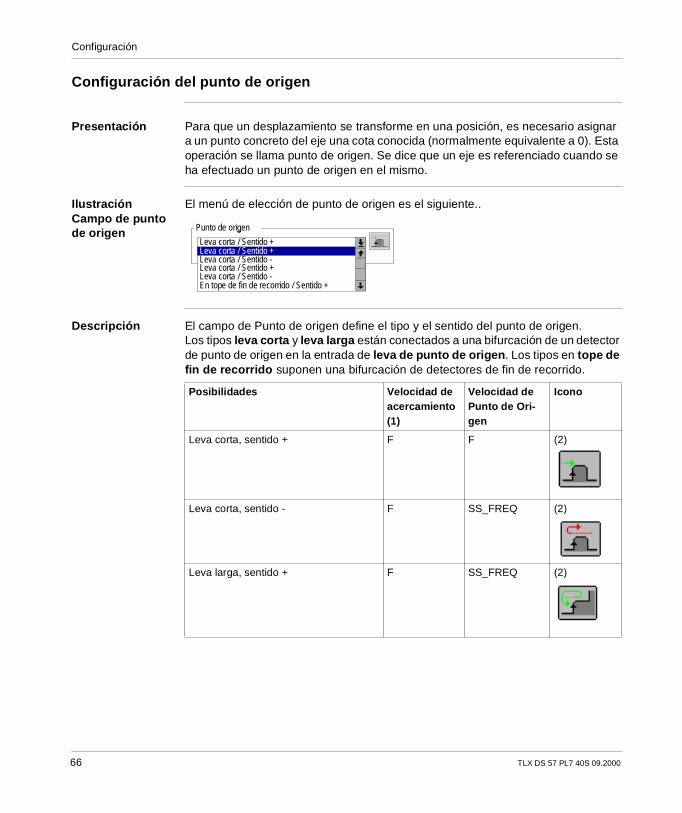
Presentación Para que un desplazamiento se transforme en una posición, es necesario asignar a un punto concreto del eje una cota conocida (normalmente equivalente a 0). Esta operación se llama punto de origen. Se dice que un eje es referenciado cuando se ha efectuado un punto de origen en el mismo.
Ilustración Campo de punto de origen
El menú de elección de punto de origen es el siguiente..
Descripción El campo de Punto de origen define el tipo y el sentido del punto de origen.Los tipos leva corta y leva larga están conectados a una bifurcación de un detector de punto de origen en la entrada de leva de punto de origen. Los tipos en tope de fin de recorrido suponen una bifurcación de detectores de fin de recorrido.
Punto de origen
Leva corta / Sentido +Leva corta / Sentido +Leva corta / Sentido -Leva corta / Sentido +Leva corta / Sentido -En tope de fin de recorrido / Sentido +
Posibilidades Velocidad de acercamiento (1)
Velocidad de Punto de Ori-gen
Icono
Leva corta, sentido + F F (2)
Leva corta, sentido - F SS_FREQ (2)
Leva larga, sentido + F SS_FREQ (2)
66 TLX DS 57 PL7 40S 09.2000

Configuración
(1) F es la velocidad programada en la instrucción en modo automático o la veloci-dad FMANU (definida en la pantalla de ajuste) en modo manual. Esta velocidad se puede modular por el coeficiente CMV.(2) El icono ilustra el punto de origen.
Comando de punto de origen
El comando de punto de origen se efectúa:l en modo automático, mediante el código de instrucción 14: punto de origen,l en modo manual, mediante el comando SET_RP: punto de origen manual. Si SS_FREQ es nulo y la velocidad de punto de origen es SS_FRQ, mientras que la velocidad real de punto de origen es la menor que el módulo puede generar en la gama seleccionada.
Punto de origen forzado
También existe un mecanismo de punto de origen forzado:l comando G62 en modo Auto,l comando RP_HERE en modo Manual.Este punto de origen consiste en forzar la posición a un valor específico. Esta ope-ración no supone ningún desplazamiento y, por tanto, no tiene en cuenta el tipo de PO seleccionado.
Leva larga, sentido - F SS_FREQ (2)
Tope de fin de recorrido, sentido + F SS_FREQ (2)
Tope de fin de recorrido, sentido - F SS_FREQ (2)
Posibilidades Velocidad de acercamiento (1)
Velocidad de Punto de Ori-gen
Icono
Nota: SS_FREQ = frecuencia de arranque y de parada.
TLX DS 57 PL7 40S 09.2000 67

Configuración
Punto de origen de leva corta
La siguiente tabla hace una descripción detallada de los puntos de origen de leva corta.
Punto de origen de leva larga
La siguiente tabla hace una descripción detallada de los puntos de origen de leva larga.
Tipo Leva corta
Sentido Sentido + Sentido -
Icono
Desplazamiento
Leva
Tipo Leva larga
Sentido Sentido +, inicio fuera de leva Sentido -, inicio fuera de leva
Icono
Desplazamiento
Leva
68 TLX DS 57 PL7 40S 09.2000

Configuración
Sentido Sentido +, inicio en la leva Sentido -, inicio en la leva
Icono
Desplazamiento
Leva
Tipo Leva larga
TLX DS 57 PL7 40S 09.2000 69
Configuración
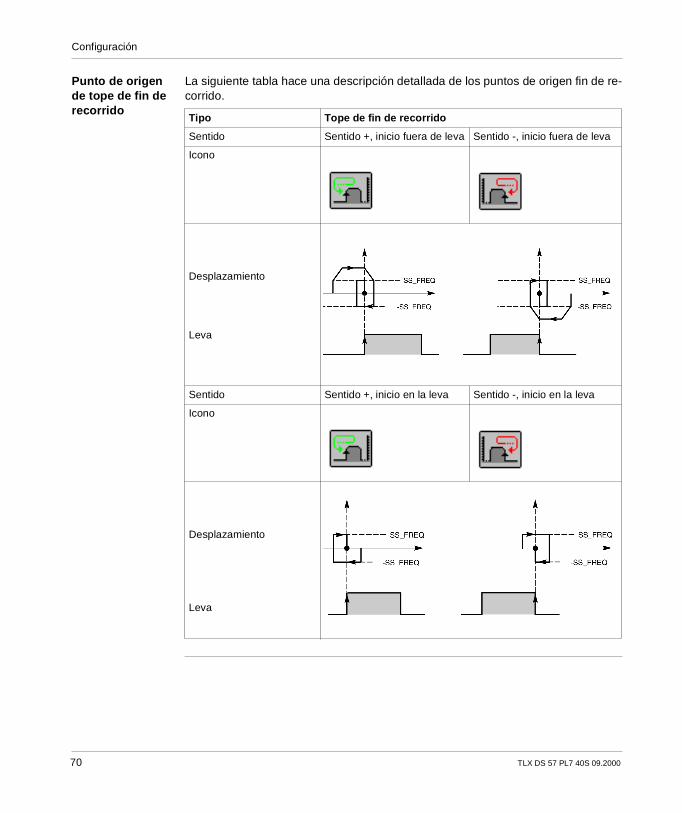
Punto de origen de tope de fin de recorrido
La siguiente tabla hace una descripción detallada de los puntos de origen fin de re-corrido.
Tipo Tope de fin de recorrido
Sentido Sentido +, inicio fuera de leva Sentido -, inicio fuera de leva
Icono
Desplazamiento
Leva
Sentido Sentido +, inicio en la leva Sentido -, inicio en la leva
Icono
Desplazamiento
Leva
70 TLX DS 57 PL7 40S 09.2000
Configuración
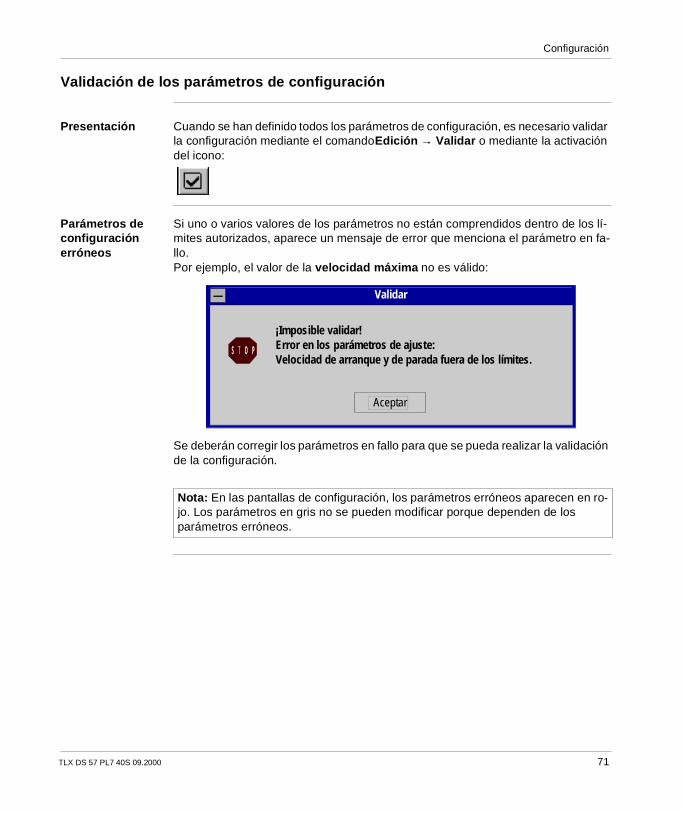
Validación de los parámetros de configuración
Presentación Cuando se han definido todos los parámetros de configuración, es necesario validar la configuración mediante el comandoEdición → Validar o mediante la activación del icono:
Parámetros de configuración erróneos
Si uno o varios valores de los parámetros no están comprendidos dentro de los lí-mites autorizados, aparece un mensaje de error que menciona el parámetro en fa-llo.Por ejemplo, el valor de la velocidad máxima no es válido:
Se deberán corregir los parámetros en fallo para que se pueda realizar la validación de la configuración.
Nota: En las pantallas de configuración, los parámetros erróneos aparecen en ro-jo. Los parámetros en gris no se pueden modificar porque dependen de los parámetros erróneos.
¡Imposible validar!Error en los parámetros de ajuste:Velocidad de arranque y de parada fuera de los límites.
Validar
S T O P
Aceptar
TLX DS 57 PL7 40S 09.2000 71
Configuración
Parámetros de ajuste erróneos
La primera vez que se valida la configuración, se inicializan los parámetros de ajus-te. Si, tras modificar los valores de configuración, los parámetros de ajuste ya no son correctos, se muestra un mensaje de error para señalar el parámetro incrimina-do.Por ejemplo, las velocidades están fuera de los límites:
Se deberá acceder a la pantalla de ajuste, corregir el parámetro en fallo y validar.
Toma en cuenta de la validación
La configuración sí se ha tenido en cuenta:l cuando todos los parámetros de configuración son correctos,l cuando todos los parámetros de ajuste son correctos,l cuando se ha realizado la validación de la pantalla de base del editor de configu-
ración.
¡Imposible validar!Error en los parámetros de configuración:Velocidad máxima fuera de los límites.
Validar
S T O P
Aceptar
72 TLX DS 57 PL7 40S 09.2000

TLX DS 57 PL7 40S 09.2000
5
Programación del comando de ejes paso a pasoPresentación
Objeto de este capítulo
Este capítulo describe el principio de programación para los diferentes modos de funcionamiento: descripción de las principales instrucciones y modos de funciona-miento.
Contenido Este capítulo contiene los siguiente apartados:
Apartado Página
Principio de programación de un eje paso a paso 75
Modos de funcionamiento 76
Programación de la función SMOVE (en modo automático) 78
Introducción de los parámetros de la función SMOVE 79
Descripción de los parámetros de la función SMOVE 80
Códigos de la función SMOVE 82
Descripción de los desplazamientos elementales con la función SMOVE 84
Descripción de los códigos de instrucción SMOVE 86
Ejemplo de uso de una posición indexada (movimientos repetitivos) 92
Encadenamiento de los comandos de movimiento 94
Función PAUSE diferida 97
Función PAUSE inmediata 99
Tratamiento de sucesos 101
Gestión de los modos de funcionamiento 103
Gestión de fallos 104
Descripción de los fallos de equipo externos 108
Descripción de los fallos de la aplicación 110
Descripción de los fallos de comando rechazado 111
Gestión del modo manual 112
73
Programación
Comandos de desplazamiento a vista 114
Comandos de desplazamiento incremental 116
Comando de punto de origen 117
Comando de punto de origen forzado 118
Gestión del modo directo (DIRDRIVE) 119
Gestión del modo parada (OFF) 121
Apartado Página
74 TLX DS 57 PL7 40S 09.2000
Programación
Principio de programación de un eje paso a paso
Presentación Cada vía (eje) del módulo de comando de ejes se programa mediante la utilización de:l la función SMOVE para los desplazamientos en modo automático,l los objetos bits (%I y %Q) y palabras (%IW, %QW y %MW), (Véanse los Los
objetos de lenguaje de la función específica de comando de ejes de paso a paso, p. 175) asociados al módulo para definir:l la selección de los modos de funcionamiento,l el comando de desplazamiento, excepto para el modo automático,l el control del estado de funcionamiento del eje y del módulo.
Objetos bit y palabras
Se puede acceder a los objetos y palabras a través de su variable o símbolo. Los símbolos se definen en el editor de variables que propone por defecto un nombre de símbolo para cada uno de los objetos.
TLX DS 57 PL7 40S 09.2000 75
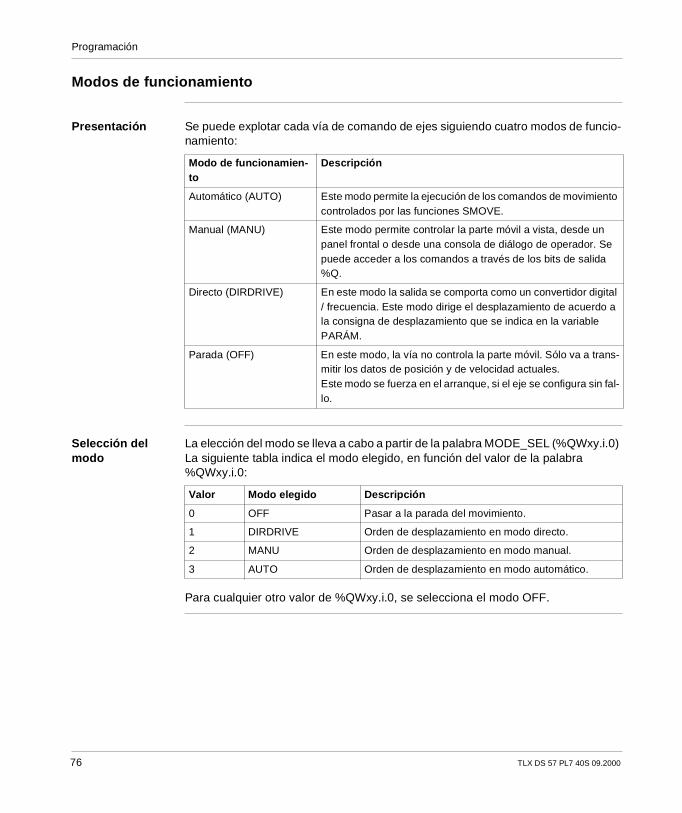
Programación
Modos de funcionamiento
Presentación Se puede explotar cada vía de comando de ejes siguiendo cuatro modos de funcio-namiento:
Selección del modo
La elección del modo se lleva a cabo a partir de la palabra MODE_SEL (%QWxy.i.0) La siguiente tabla indica el modo elegido, en función del valor de la palabra %QWxy.i.0:
Para cualquier otro valor de %QWxy.i.0, se selecciona el modo OFF.
Modo de funcionamien-to
Descripción
Automático (AUTO) Este modo permite la ejecución de los comandos de movimiento controlados por las funciones SMOVE.
Manual (MANU) Este modo permite controlar la parte móvil a vista, desde un panel frontal o desde una consola de diálogo de operador. Se puede acceder a los comandos a través de los bits de salida %Q.
Directo (DIRDRIVE) En este modo la salida se comporta como un convertidor digital / frecuencia. Este modo dirige el desplazamiento de acuerdo a la consigna de desplazamiento que se indica en la variable PARÁM.
Parada (OFF) En este modo, la vía no controla la parte móvil. Sólo va a trans-mitir los datos de posición y de velocidad actuales.Este modo se fuerza en el arranque, si el eje se configura sin fal-lo.
Valor Modo elegido Descripción
0 OFF Pasar a la parada del movimiento.
1 DIRDRIVE Orden de desplazamiento en modo directo.
2 MANU Orden de desplazamiento en modo manual.
3 AUTO Orden de desplazamiento en modo automático.
76 TLX DS 57 PL7 40S 09.2000

Programación
Cambio de modo durante un movimiento
El cambio de modo de funcionamiento mientras que un movimiento está en curso (bit DONE: %Ixy.i.1 en el estado 1) provoca la parada de la parte móvil. Mientras la parte móvil sí está parada (bit NOMOTION: %Ixy.i.8 en el estado 1), se activa el nuevo modo de funcionamiento.
Nota: Únicamente se examinan los comandos relacionados con el modo en curso. Los restantes comandos se ignorarán: por ejemplo, la vía que está en modo MANU (IN_MANU vale 1), si el comando DIRDRV se activa, se ignora y habrá que pasar, previamente, al modo DIRDRIVE.
TLX DS 57 PL7 40S 09.2000 77
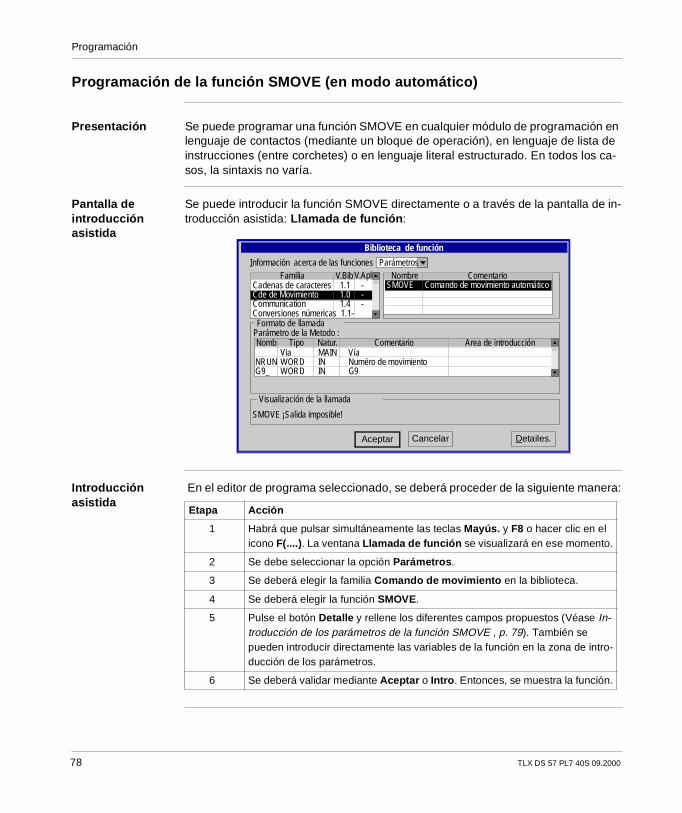
Programación
Programación de la función SMOVE (en modo automático)
Presentación Se puede programar una función SMOVE en cualquier módulo de programación en lenguaje de contactos (mediante un bloque de operación), en lenguaje de lista de instrucciones (entre corchetes) o en lenguaje literal estructurado. En todos los ca-sos, la sintaxis no varía.
Pantalla de introducción asistida
Se puede introducir la función SMOVE directamente o a través de la pantalla de in-troducción asistida: Llamada de función :
Introducción asistida
En el editor de programa seleccionado, se deberá proceder de la siguiente manera:
Cancelar
Biblioteca de función
Aceptar
Visualización de la llamada
Formato de llamadaParámetro de la Metodo :
Información acerca de las funciones
SMOVE ¡Salida imposible!
ParámetrosFamilia V.Bib Nombre Comentario
Area de introducciónComentarioNatur.TipoNombVia MAIN Vía
NRUN WORD IN Numéro de movimientoG9_ WORD IN G9
SMOVE Cadenas de caracteres 1.1 -Cde de Movimiento 1.0 -Communication 1.4 -Conversiones númericas 1.1-
Comando de movimiento automático V.Apl
Detailes.
Etapa Acción
1 Habrá que pulsar simultáneamente las teclas Mayús. y F8 o hacer clic en el icono F(....). La ventana Llamada de función se visualizará en ese momento.
2 Se debe seleccionar la opción Parámetros .
3 Se deberá elegir la familia Comando de movimiento en la biblioteca.
4 Se deberá elegir la función SMOVE.
5 Pulse el botón Detalle y rellene los diferentes campos propuestos (Véase In-troducción de los parámetros de la función SMOVE , p. 79). También se pueden introducir directamente las variables de la función en la zona de intro-ducción de los parámetros.
6 Se deberá validar mediante Aceptar o Intro. Entonces, se muestra la función.
78 TLX DS 57 PL7 40S 09.2000

Programación
Introducción de los parámetros de la función SMOVE
Introducción El comando de un movimiento se programa mediante una función SMOVE, con la siguiente sintaxis:SMOVE %CHxy.i(N_Run,G9_,G,X,F,M)La pantalla Detalle permite introducir de manera asistida cada uno de los paráme-tros.
Pantalla de detalle de la función SMOVE
La pantalla de Detalle de la función SMOVE es la siguiente:
Los campos de introducción (parámetros de la función SMOVE) son los siguientes:
Parámetro Descripción
%CHxy.i Dirección de la vía.
N_Run Número del movimiento.
G9_ Tipo de desplazamiento.
G Código de instrucción.
X Coordenada de la posición que se va a alcanzar.
F Velocidad de desplazamiento de la parte móvil.
M Tratamiento de sucesos, salida TON auxiliar asociada en la vía.
SMOVE
Aceptar Cancelar
Cancelar
Cancelar
Cancelar
Cancelar
Cancelar
Cancelar
Dirección de la vía
Códigos de desplazamientoN_Run Número de moviemiento
G9_ 90
Desplazamiento sobre posición sin paradaG
1
%CH2.1
X
F
1000000
500
Posición
Velocidad de desplazamiento Parámetro M
Z
Origen Evt Salidad TON axiliares
Sin alterarSíncrono con mov.Consecutivo a mov.
AUX 0
F
x
G01
G14
G09
G62++++ 0.0
G11
G07
G10
G051 2 3
Cancelar16#1101
TLX DS 57 PL7 40S 09.2000 79
Programación
Descripción de los parámetros de la función SMOVE
Presentación Para programar una función de movimiento, se deberán introducir los siguientes pa-rámetros:SMOVE %CHxy.i(N_Run,G9_,G,X,F,M)
Dirección de la vía
%CHxy.i define la dirección de la vía del módulo de comando de ejes en la configu-ración del autómata:
Número de movimiento
N_Run define el número del movimiento (entre 0 y 32767). Este número identifica el movimiento que realiza la función SMOVE.En modo de depuración, este número permite conocer cuál es el movimiento en cur-so.
Tipo de desplazamiento
G9_ define el tipo de desplazamiento:
Para elegir el tipo de movimiento, se puede utilizar el botón de desplazamiento si-tuado a la derecha del campo G9_ o introducir directamente el código durante una introducción directa (sin pasar por la pantalla Detalle).
Código de instrucción
G define el código de instrucción (Véase Códigos de la función SMOVE, p. 82) de la función SMOVE.
Parámetro Significado
x Número del rack.
y Posición del módulo en el rack.
i Número de la vía:l 0 para un módulo TSX CFY 11,l 0 y 1 para un módulo TSX CFY 21,
Código Tipo de desplazamiento
90 Desplazamiento absoluto .
91 Desplazamiento relativo respecto a la posición actual .
98 Desplazamiento relativo respecto a la posición memorizada PREF1. El almacenamiento de la posición PREF1 se lleva a cabo me-diante el código de instrucción G07.
80 TLX DS 57 PL7 40S 09.2000
Programación
Coordenada de la posición que se va a alcanzar
X define la coordenada de la posición que se va a alcanzar o hacia la que se debe desplazar la parte móvil (en el caso de un desplazamiento sin parada). Esta posi-ción puede ser: l inmediata,l codificada en una palabra doble interna %Mdi o constante interna %KDi (esta pa-
labra se puede indexar).Este valor se expresa en la unidad, definida por el parámetro de configuración Uni-dades de longitud (por ejemplo, micras).
Velocidad de desplazamiento de la parte móvil
F define la velocidad de desplazamiento de la parte móvil. Esta velocidad puede ser:l inmediata,l codificada en una palabra doble interna %Mdi o constante interna %KDi (esta pa-
labra se puede indexar).La unidad de velocidad es el Hercio.
Parámetro M M define una palabra que codifica en los cuartetos (en hexadecimal):l la activación o la no activación del arranque del tratamiento de sucesos de la apli-
cación, para las instrucciones G10, G11, G5 y G7:l M = 16#1000: activación de la tarea de sucesos asociada, l M = 16#0000: no activación de la tarea de sucesos cuando se ejecuta el co-
mando SMOVE.Por ejemplo:
Nota: En el caso de las instrucciones G14, G21 y G62, este parámetro representa el valor de punto de origen.
Nota: La velocidad puede modularse durante el desplazamiento gracias al parámetro CMV (coeficiente de modulación de la velocidad). F real = F programa-da x CMV/1000. Este parámetro inicializado por defecto a 1000 puede estar com-prendido en el intervalo [0, 2000], la velocidad resultante tiene que ser siempre superior a SS_FREQ. El valor 0 supone la parada de la parte móvil.
Nota: La codificación se realiza automáticamente en el campo M de la pantalla De-talle, cuando se hacen las elecciones utilizando las casillas y los botones de se-lección que propone esta pantalla.
Byte 3 2 1 0
16#
TLX DS 57 PL7 40S 09.2000 81

Programación
Códigos de la función SMOVE
Presentación El parámetro G define el código de instrucción.Para elegir el código de instrucción, se puede utilizar el botón de deslizamiento si-tuado a la derecha del campo G, pulsar el icono correspondiente al movimiento o introducir directamente el código durante una introducción directa (sin pasar por la pantalla Detalle).
Lista de los códigos de instrucción
Los códigos de instrucción que se pueden elegir en la pantalla de Detalle son los siguientes:
Código de instruc-ción
Significado Icono
09 Desplazamiento a la posición con parada.
01 Desplazamiento a la posición sin parada.
10 Desplazamiento hasta suceso con parada.
11 Desplazamiento hasta suceso sin parada.
14 Punto de origen.
62 Punto de origen forzado.
05 Espera de suceso.
07 Almacenamiento de la posición en suceso.
82 TLX DS 57 PL7 40S 09.2000
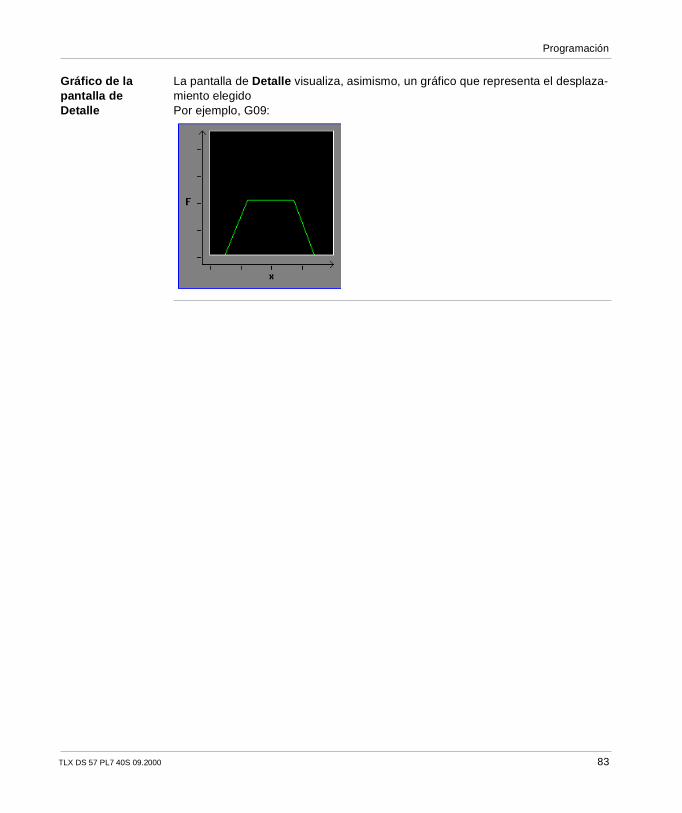
Programación
Gráfico de la pantalla de Detalle
La pantalla de Detalle visualiza, asimismo, un gráfico que representa el desplaza-miento elegidoPor ejemplo, G09:
TLX DS 57 PL7 40S 09.2000 83
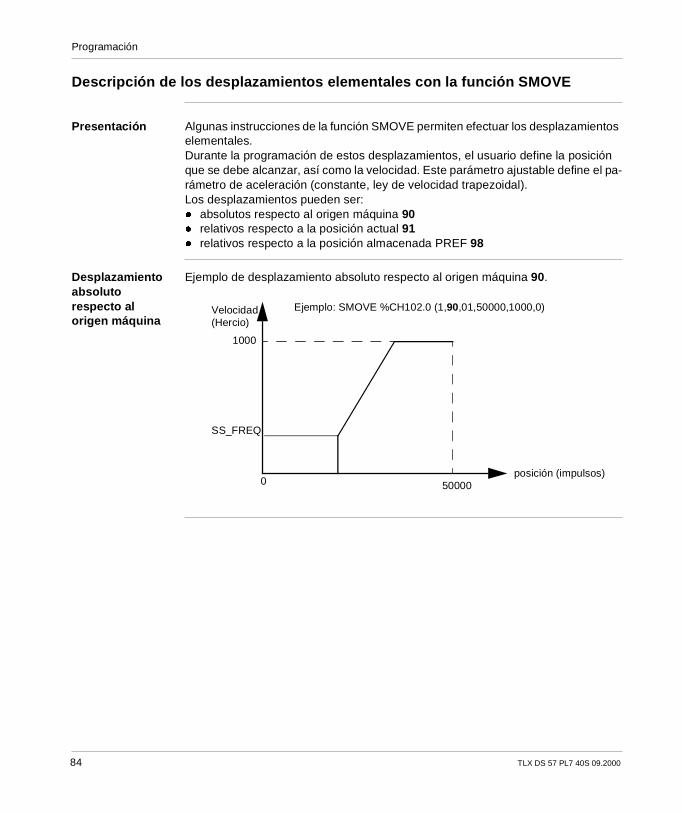
Programación
Descripción de los desplazamientos elementales con la función SMOVE
Presentación Algunas instrucciones de la función SMOVE permiten efectuar los desplazamientos elementales.Durante la programación de estos desplazamientos, el usuario define la posición que se debe alcanzar, así como la velocidad. Este parámetro ajustable define el pa-rámetro de aceleración (constante, ley de velocidad trapezoidal).Los desplazamientos pueden ser:l absolutos respecto al origen máquina 90l relativos respecto a la posición actual 91l relativos respecto a la posición almacenada PREF 98
Desplazamiento absoluto respecto al origen máquina
Ejemplo de desplazamiento absoluto respecto al origen máquina 90.
posición (impulsos)0
Velocidad
1000
50000
SS_FREQ
(Hercio)
Ejemplo: SMOVE %CH102.0 (1,90,01,50000,1000,0)
84 TLX DS 57 PL7 40S 09.2000

Programación
Desplazamiento relativo respecto a la posición actual
Ejemplo de desplazamiento relativo respecto a la posición actual 91.
Desplazamiento relativo respecto a la posición almacenada
Ejemplo de desplazamiento relativo respecto a la posición almacenada PREF 98.
posición (impulsos)0
Velocidad
1000
X+40000
SS_FREQ
(Hercio)
Ejemplo: SMOVE %CH102.0 (1,91,01,40000,1000,0)
X
posición (impulsos)0
Velocidad
1000
PREF+30000
SS_FREQ
(Hercio)
Ejemplo: SMOVE %CH102.0 (1,98,01,30000,1000,0)
PREF
TLX DS 57 PL7 40S 09.2000 85

Programación
Descripción de los códigos de instrucción SMOVE
Presentación Se pueden programar tres clases de desplazamientos:l desplazamientos a una posición (códigos de instrucción 01 y 09)l desplazamientos hasta la detección de suceso (códigos de instrucción 11 y 10)l punto de origen (instrucción 14)Para conocer las condiciones de ejecución de las instrucciones, véase Diagnóstico y mantenimiento, p. 161.
Desplazamiento a la posición sin parada
Ejemplo de desplazamiento a la posición sin parada: código de instrucción 01.
Nota: Si la instrucción 01 no va seguida de ninguna instrucción de movimiento, la parte móvil continúa el desplazamiento hasta alcanzar los topes de programa (tras el rebasamiento de la posición que se debe alcanzar, el coeficiente de modulación de velocidad CMV ya no se interpreta).
posición (impulsos)0
Velocidad
1000
50000
SS_FREQ
(Hercio)Ejemplo: SMOVE %CH102.0 (1,90,01,50000,1000,0)
86 TLX DS 57 PL7 40S 09.2000

Programación
Desplazamiento a la posición con parada
Ejemplo de desplazamiento a la posición con parada: código de instrucción 09.
Desplazamiento hasta suceso sin parada
Ejemplo de desplazamiento hasta suceso sin parada: código de instrucción 11.
posición0
Velocidad
1000
50000
SS_FREQ
(Hercio)Ejemplo: SMOVE %CH102.0 (1,90,09,50000,1000,0)
(impulsos)
Nota: El suceso puede ser un flanco ascendente o descendiente en la entrada de leva de suceso dedicada o en el flanco ascendente del bit EXT_EVT (%Qxy.I.11) a través del programa. Se deberá definir obligatoriamente el parámetro de posición. Si el suceso no se ha detectado, al instrucción se termina hasta que se alcanza la posición de destino solicitada.Estas instrucciones 11 y 12 pueden activar la tarea de sucesos durante la detec-ción del suceso si M vale 16#1000.
posición (impulsos)0
Velocidad
3000
50000
SS_FREQ
(Hercio)
Ejemplo: SMOVE %CH102.0 (1,90,11,500000,3000,0)
suceso
TLX DS 57 PL7 40S 09.2000 87

Programación
Desplazamiento hasta suceso con parada
Ejemplo de desplazamiento hasta suceso con parada: código de instrucción 10.
Punto de origen Ejemplo de punto de origen: código de instrucción 14. Punto de origen configurado-en la leva corta en sentido +. En el inicio, la parte móvil se encuentra fuera de la leva.
posición0
Velocidad
2000
SS_FREQ
(Hercio)Ejemplo: SMOVE %CH102.0 (1,90,10,500000,2000,0)
(impulsos)
suceso
50000
Nota: Esta instrucción provoca una secuencia de punto de origen según la elec-ción efectuada en la configuración. El valor que se muestra en el parámetro X cor-responde a la coordenada que se va a cargar en el valor actual cuando se detecta el origen.
posición0
Velocidad
2000
SS_FREQ
(Hercio)
Ejemplo: SMOVE %CH102.0 (1,90,10,500000,2000,0)
(impulsos)
Punto de origen
50000
88 TLX DS 57 PL7 40S 09.2000
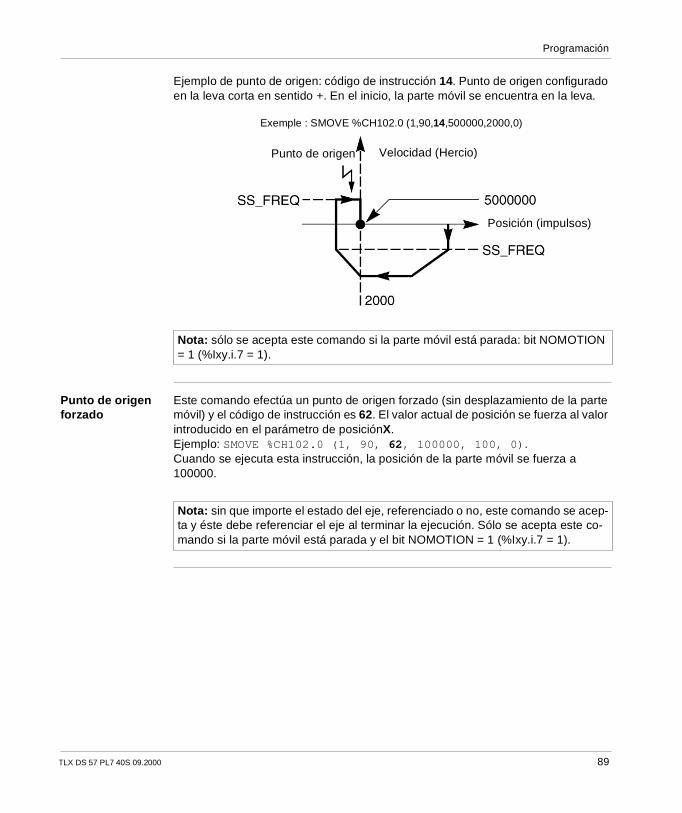
Programación
Ejemplo de punto de origen: código de instrucción 14. Punto de origen configurado en la leva corta en sentido +. En el inicio, la parte móvil se encuentra en la leva.
Punto de origen forzado
Este comando efectúa un punto de origen forzado (sin desplazamiento de la parte móvil) y el código de instrucción es 62. El valor actual de posición se fuerza al valor introducido en el parámetro de posiciónX.Ejemplo: SMOVE %CH102.0 (1, 90, 62, 100000, 100, 0).Cuando se ejecuta esta instrucción, la posición de la parte móvil se fuerza a 100000.
Nota: sólo se acepta este comando si la parte móvil está parada: bit NOMOTION = 1 (%Ixy.i.7 = 1).
Exemple : SMOVE %CH102.0 (1,90,14,500000,2000,0)
Posición (impulsos)
Velocidad (Hercio)Punto de origen
Nota: sin que importe el estado del eje, referenciado o no, este comando se acep-ta y éste debe referenciar el eje al terminar la ejecución. Sólo se acepta este co-mando si la parte móvil está parada y el bit NOMOTION = 1 (%Ixy.i.7 = 1).
TLX DS 57 PL7 40S 09.2000 89
Programación
Espera de suceso
Este comando de código de instrucción 05, pone la vía en espera de un suceso que puede ser:l un cambio de estado de la entrada de sucesos (flanco ascendente o descenden-
te dependiendo de la elección efectuada en la configuración),l un flanco ascendente del bit EVT_EXT (%Qxy.11)En esta instrucción, F especifica el tiempo de envoltura con una resolución de 10 ms. Si no se ha arrancado el suceso cuando termina el tiempo de envoltura, se des-activa el comando. Si F=0, la espera se efectúa indefinidamente.
Ejemplo: SMOVE %CH102.0 (1, 90, 05, 500, 100, 0).Es posible asociar un tratamiento de suceso (Véase Tratamiento de sucesos, p. 101), para ello hay que poner M en la posición 16#1000.
Almacenamien-to de la posición actual en suceso
Tras la ejecución de esta instrucción, el código 07, cuando el suceso definido en la configuración se produce en la entrada refleja, la posición actual se almacena en el registro PREF.
Ejemplo: SMOVE %CH102.0 (1, 90, 07, 1, 0, 0).
Nota: durante la ejecución de esta instrucción, el objeto %MDxy.i.10 (T_SPEED velocidad que se debe alcanzar) no contiene el parámetro F de tiempo de espera. Por otra parte, se aconseja asociar sistemáticamente un tratamiento de sucesos en este comando, ya que el bit TO_G05 (%Ixy.i.39), que permite a la aplicación discriminar si el comando se termina por la detección de un suceso o por el tran-scurso del tiempo de envoltura, sólo se actualiza si el tratamiento se activa.
Nota: el parámetro de posición X tiene que ser igual a 1.
90 TLX DS 57 PL7 40S 09.2000

Programación
Tabla descriptiva del almacenamiento de la posición actual sobre suceso.
Tipo de suceso so-bre la entrada de suceso
Cronograma Elección en configuración
Flanco ascendente
Flanco descendente
Comportamiento
Nota: esta instrucción no es con bloqueo y el programa encadena directamente con la siguiente instrucción. Se puede acceder al valor de la posición actual al-macenada en el registro PREF (%IDxy.i.7) únicamente si se solicita la activación del tratamiento de sucesos (M=16#10000).
Nota: durante la ejecución de esta instrucción, el objeto %MDxy.i.8 (T_XPOS, destino de la posición que se debe alcanzar) no contiene el parámetro X =1.
PREF
Position
t
TLX DS 57 PL7 40S 09.2000 91

Programación
Ejemplo de uso de una posición indexada (movimientos repetitivos)
Presentación Se pretende efectuar nueve veces la secuencia de los siguientes movimientos ele-mentales: l desplazamiento A hasta la detección del borde de pieza 1,l desplazamiento B hasta la posición 2 = +20000 respecto al borde de pieza 1,l desplazamiento C hasta la posición 3 = +10000 respecto al borde de pieza 1,l desplazamiento C hasta el borde de la pieza 1.En este ejemplo, se supone que se ha efectuado el punto de origen y que la parte móvil está en la posición de origen.
Ilustración Diagrama de posicionamiento.
Nota: la secuencia de movimientos elementales se representa en negrita Los números mencionados correspondientes a los números de pasos de programa in-cluidos en la función SMOVE.
Velocidad(Hercio)
suceso suceso suceso
92 TLX DS 57 PL7 40S 09.2000

Programación
Descripción del programa
Grafcet de funcionamiento de los movimientos repetitivos.
Nota: todas las acciones deben programarse en la activación.
0
1
2
3
4
5
!RE %I1.0 AND %I2.0.3 AND %I2.0.19 (*I2.0.3:AX_OK %I2.0.19:IN_AUTO*)
!SMOVE %CH2.0(1,90,7,1,0,0);INC %MW0;
!%I2.0 (*I2.0.0:NEXT*)
!SMOVE %CH2.0(2,90,11,800000,500,0)
!%I2.0
!SMOVE %CH2.0(2,98,09,20000,500,0)
!%I2.0
!SMOVE %CH2.0(4,98,09,10000,100,0)
!%I2.0
!%I2.0 AND (%MW0<=10)
!%MW0:=0;%QW2.0:=3 (*%QW2.0:MOD_SEL:=AUTO*)
!SMOVE %CH2.0(5,98,09,0,100,0)
TLX DS 57 PL7 40S 09.2000 93

Programación
Encadenamiento de los comandos de movimiento
Realización de una trayectoria
La realización de una trayectoria se efectúa mediante la programación de una serie de instrucciones de desplazamientos elementales (función SMOVE).Cada comando elemental de ejecución de una función SMOVE sólo se debe efec-tuar una vez. Se debe programar la ejecución:l en Grafcet: en una etapa programada en la activación o desactivación, l en lenguaje literal o de contactos, en flanco ascendente de un bit.La confirmación de la ejecución de la función la muestra el módulo a través de los bits NEXT y DONE.
Memoria tampón El módulo TSX CFY está dotado de un mecanismo que permite el encadenamiento de los comandos de movimiento.Cada eje del módulo TSX CFY comprende una memoria tampón que permite recibir dos comandos de desplazamiento, además de la que esté ejecutando en esos mo-mentos. Así pues, al finalizar la ejecución del comando en curso, encadena direc-tamente en el primer comando presente en la memoria tampón.Encadenamiento de los comandos:
Encadenamien-to entre dos comandos
El encadenamiento entre dos comandos de movimiento se efectúa de la siguiente manera :l instantáneamente si el primer movimiento es sin parada,l desde el momento en que se para la parte móvil, si el primer movimiento es sin
parada.Para que el encadenamiento sea instantáneo, es preciso que el tiempo de ejecución de la instrucción en curso sea superior al período de la tarea maestra.
SMOVE %CH102.0 (01,90,01,...)
SMOVE %CH102.0 (02,900,09,...)
SMOVE %CH102.0 (03,900,09,...)
SMOVE
NEXT
Nota: Sólo se debe transmitir al módulo un nuevo comando si la memoria tampón asociada al eje que se va a controlar no es completa.
94 TLX DS 57 PL7 40S 09.2000

Programación
Bits asociados al mecanismo de encadenamiento
Los bits asociados al mecanismo de encadenamiento son los siguientes:
Ejemplo El siguiente esquema representa el cronograma de un encadenamiento:
Direccionamiento Descripción
NEXT (%Ixy.i.0) Indica al programa usuario que el módulo está listo para recibir el siguiente comando de movimiento.
DONE (%Ixy.i;1) Indica el fin de ejecución del comando en curso y la ausencia de nue-vos comandos en la memoria tampón.
AT_PNT (%Ixy.i.8) Señala que la parte móvil ha alcanzado el punto apuntado:l para un movimiento sin parada, se queda a 0,l para un movimiento sin parada, es equivalente a NOMOTION.
Nota: El programa siempre tiene que comprobar o bien el bit NEXT, o bien el bit DONE antes de ejecutar un comando SMOVE.
SMOVE%CH2(1,90,01
SMOVE%CH2(2,90,09,..;
SMOVE%CH2(3,90,09,..;
SMOVE%CH2(4,90,09,..;
SMOVE%CH2(5,90,11,..;
L = Inicio
ESPERA
ESPERA
ESPERA
ESPERA ESPERA
TLX DS 57 PL7 40S 09.2000 95

Programación
Para un movimiento con parada: DONE pasa a 1 cuando NOMOTION pasa a 1 y cuando la memoria tampón está disponible.Para un movimiento sin parada: DONE pasa a 1 cuando se supera la posición des-tino y cuando la memoria tampón está vacía.
96 TLX DS 57 PL7 40S 09.2000
Programación
Función PAUSE diferida
Presentación El comando PAUSE (%Qxy.i.16) permite suspender el encadenamiento de los mo-vimientos. Sólo se activa cuando la parte móvil está en parada, es decir, al final de una instrucción G09 ó G10.El siguiente movimiento arranca desde que el comando PAUSE se pone en reset.El bit ON_PAUSE (%Ixy.i.26) señala, cuando está a 1, que el eje está en el estado de PAUSE.Esta función tiene dos posibles usos:l ejecución bloque por bloque del programa de movimiento,l sincronización de los ejes de un mismo módulo de comando de ejes de paso a
paso.
Ejecución blo-que por bloque del programa de movimiento
Si la instrucción en curso es una instrucción con parada, la activación del comando PAUSE en la pantalla de depuración en modo automático, o la puesta a 1 del bit PAUSE (%Qxy.i.16) provoca, tras finalizar la ejecución de la instrucción en curso, la puesta en estado de espera: parada del encadenamiento de los movimientos.Al activar y desactivar sucesivamente el comando Pause, también se pueden eje-cutar los movimientos bloque por bloque con el fin de facilitar su depuración.
Sincronización de varios ejes
Para cada eje, la puesta a 1 del bit PAUSE (%Qxy.i.12) por el programa, provoca, tras la ejecución de la instrucción en curso, la puesta en estado de espera.Al ponerse en reset el bit PAUSE, el módulo sigue la ejecución de las instrucciones.
TLX DS 57 PL7 40S 09.2000 97

Programación
Ejemplo La ejecución del desplazamiento de la parte móvil 1 se detiene cuando la parte mó-vil 0 alcanza la posición 100000. El desplazamiento se activa de nuevo cuando la parte móvil 0 alcanza la cota 500000.
Nota: El comando PAUSE sólo se trata cuando el modo AUTO está activo.
Parte móvil 0
Bit PAUSE
Parte móvil 1
Velocidad (Hercio)
Tiempo
IF (%ID2.1 >= 100000) THEN SET %Q2.1.12;...............................IF (%ID2.1 >= 500000) THEN RESET %Q2.1.12;
Tiempo
0
100000 500000
SS_FREQ
SS_FREQ
Posición(impulsos)
98 TLX DS 57 PL7 40S 09.2000
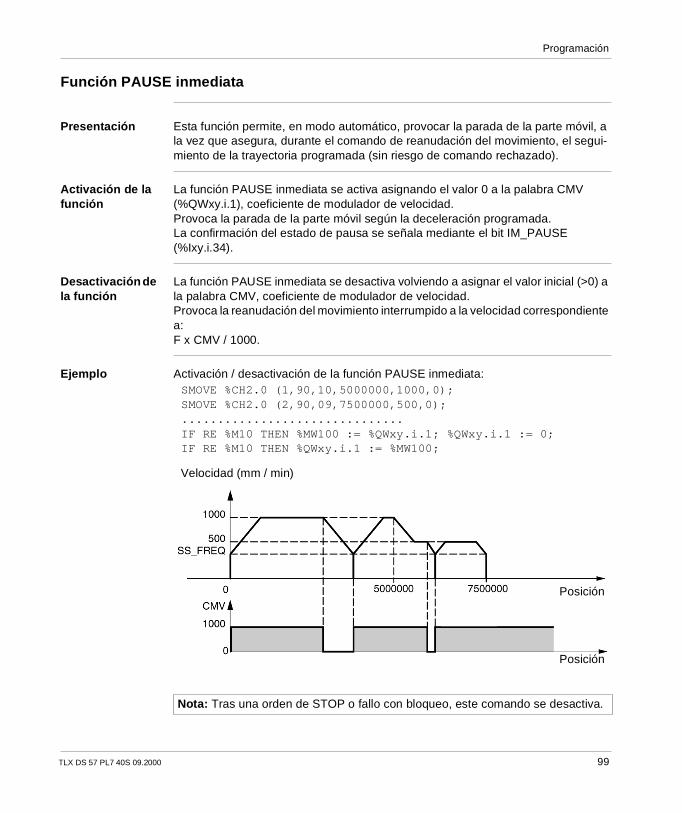
Programación
Función PAUSE inmediata
Presentación Esta función permite, en modo automático, provocar la parada de la parte móvil, a la vez que asegura, durante el comando de reanudación del movimiento, el segui-miento de la trayectoria programada (sin riesgo de comando rechazado).
Activación de la función
La función PAUSE inmediata se activa asignando el valor 0 a la palabra CMV (%QWxy.i.1), coeficiente de modulador de velocidad.Provoca la parada de la parte móvil según la deceleración programada.La confirmación del estado de pausa se señala mediante el bit IM_PAUSE (%Ixy.i.34).
Desactivación de la función
La función PAUSE inmediata se desactiva volviendo a asignar el valor inicial (>0) a la palabra CMV, coeficiente de modulador de velocidad.Provoca la reanudación del movimiento interrumpido a la velocidad correspondiente a:F x CMV / 1000.
Ejemplo Activación / desactivación de la función PAUSE inmediata:
Nota: Tras una orden de STOP o fallo con bloqueo, este comando se desactiva.
SMOVE %CH2.0 (1,90,10,5000000,1000,0);SMOVE %CH2.0 (2,90,09,7500000,500,0);...............................IF RE %M10 THEN %MW100 := %QWxy.i.1; %QWxy.i.1 := 0;IF RE %M10 THEN %QWxy.i.1 := %MW100;
Velocidad (mm / min)
Posición
Posición
TLX DS 57 PL7 40S 09.2000 99

Programación
Nota: cuando se franquea la posición apuntada durante la parada que sigue al co-mando de pausa inmediata, el movimiento en curso se considera terminado. En este caso, la reanudación de la trayectoria se efectúa con el movimiento que es-taba en espera en la memoria tampón.
100 TLX DS 57 PL7 40S 09.2000
Programación
Tratamiento de sucesos
Presentación Las vías de los módulos TSX CFY pueden activar una tarea de sucesos. Para ello, se deberá haber validado la funcionalidad en la pantalla de configuración mediante la asociación de un número de tratamiento de sucesos en la vía (Véase Configura-ción de la tarea de sucesos, p. 65).
Activación de una tarea de sucesos
Las siguientes instrucciones arrancan la emisión de un suceso que activa la tarea de sucesos:l Desplazamiento hasta el suceso, códigos 10 y 11: el tratamiento de sucesos de
la aplicación se activa durante la detección de un suceso.l Espera de un suceso, código 05: el tratamiento de sucesos de la aplicación se
activa cuando se termina la instrucción.l Almacenamiento de la posición actual tras la aparición de un suceso, código 07:
el tratamiento de sucesos de la aplicación se activa cuando termina el almace-namiento de la posición PREF.
El tratamiento de sucesos de la aplicación se activa si el bit 12 del parámetro M de la función SMOVE asociada a la instrucción se pone en la posición 1 (M vale 16#1000).
Variables que puede explotar la tarea de sucesos
l Si se eligen varios orígenes de suceso, los siguientes bits permiten determinar el origen del arranque del tratamiento de sucesos de la aplicación:l EVT_G1X (%Ixy.i.40): fin de G10 ó G11 sobre suceso,l EVT_G05 (%Ixy.i.38): fin de G05 sobre suceso,l TO_G05 (%Ixy.i.39): temporización de G05 transcurrido,l EVT_G07 (%Ixy.i.37): almacenamiento de posición,
l El bit OVR_EVT (%Ixy.i.36) permite detectar un retraso en la emisión del suceso o una pérdida de suceso.
l Valor de la posición almacenada PREF (%IDxy.i.7).
Nota: Los bits y las palabras descritas a continuación son los únicos valores actu-alizados en la tarea de sucesos y sólo se actualizan en el autómata durante la ac-tivación de la tarea.
TLX DS 57 PL7 40S 09.2000 101

Programación
Enmascaramien-to de sucesos
El lenguaje PL7 ofrece dos medios para enmascarar los sucesos:l Instrucción de enmascaramiento de sucesos: MASKEVT() (la instrucción UN-
MASKEVT() permite el desenmascaramiento). l Bit %S38 = 0 (inhibición global de sucesos). El bit %S38 está normalmente en el
estado 1.Esquema de síntesis:
Tarea de sucesos
EVTi
Procesador
TSX CFYTarea de sucesos
EVTi
102 TLX DS 57 PL7 40S 09.2000

Programación
Gestión de los modos de funcionamiento
Conexión del módulo
En la conexión del módulo, o durante su embrochado, el módulo TSX CFY efectúa autopruebas con las salidas en posición de seguridad (salidas a 0).Al final de las autopruebas:
Autómata en RUN
Se pueden explotar todos los modos de funcionamiento de las vías configuradas.
Paso del autómata de RUN a STOP
Cuando el autómata pasa de RUN a STOP o durante la pérdida de comunicación procesador / módulo, la parte móvil decelera y se para y el módulo se pone en modo de parada (OFF).
Cambio de configuración (reconfigura-ción)
l La parte móvil decelera y se para.l La vía se desconfigura.l La vía prueba la nueva configuración con las salidas en posición de seguridad.l Si la nueva configuración es correcta, la vía pasa a modo de parada (OFF).l Si la configuración es incorrecta, el módulo señala un fallo y mantiene las salidas
en posición de seguridad.
Corte y reanudación de corriente
Ante un corte de corriente, la parte móvil se pone en parada.Ante un arranque en frío o un rearranque en caliente, el procesador del módulo transmite automáticamente la configuración de las vías. Éste se pone en modo de parada (OFF).
Si las autopruebas... Entonces el módulo...
no han detectado errores. prueba la configuración con las salidas en posición de se-guridad. Si la configuración es correcta, el módulo pasa a modo de inhibición (OFF).
han detectado un error o si la configuración es incorrecta.
señala un fallo y mantiene las salidas en posición de se-guridad.
Nota: El bit %S13 permite detectar un paso a STOP del autómata. Se posiciona a 1 durante el primer ciclo tras una puesta en RUN del autómata.
TLX DS 57 PL7 40S 09.2000 103

Programación
Gestión de fallos
Presentación El control de fallos es primordial en el campo del comando de posicionamiento, de-bido a los riesgos inherentes a las partes móviles en movimiento.El módulo efectúa los controles de modo interno y automático.
Tipos de fallos El módulo detecta cuatro tipos de fallos:l Los fallos de módulo . Son los fallos de equipo internos del módulo, todos los
ejes controlados por el módulo se ven afectados por la aparición de este tipo de fallo. Se pueden detectar durante las autopruebas (durante una reinicialización del módulo) o durante el funcionamiento normal (fallo I/O).
l Los fallos de vías de equipo externas al módulo (por ejemplo, cortocircuito de la salida freno).
l Los fallos de vías de la aplicación conectada a los ejes (por ejemplo, paso fue-ra del tope de programa).El control de fallos de nivel de eje está activo siempre que el eje esté configurado.
l Los fallos de vías de comandos rechazados . Son los fallos que pueden apa-recer durante la ejecución de un comando de movimiento, la transferencia de configuración, la transferencia de parámetros de ajuste o el cambio de modos de funcionamiento.
En modo de parada (OFF), se inhibe el control de los fallos de la aplicación
Niveles de gravedad
Los fallos se clasifican en dos niveles de gravedad:l Los fallos críticos o con bloqueo provocan la parada de la parte móvil, en el
caso de un fallo de eje, o de las partes móviles gestionadas por el módulo, en el caso de un fallo de módulo. Dan lugar a los siguientes tratamientos:l señalización del fallo,l deceleración de la parte móvil hasta parada,l invalidación del traductor, activación del freno,l borrado de todos los comandos almacenados,l espera de confirmación.El fallo debe desaparecer y estar confirmado para poder reiniciar la aplicación.
Nota: Los parámetros de control de eje pueden validar o inhibir el control de cier-tos fallos de nivel de eje. Estos parámetros de control se pueden ajustar en la pan-talla de ajuste.
104 TLX DS 57 PL7 40S 09.2000

Programación
l Los fallos no críticos provocan una señalización de fallo sin poner la parte mó-vil en parada. Se debe programar, en PL7, la acción que se va a realizar frente a este tipo de fallo.La señalización del fallo desaparece cuando el fallo ha desaparecido y se ha confirmado (la confirmación sólo se memoriza y es efectiva si el fallo ha desapa-recido).
Programación de fallos
Los fallos se pueden visualizar, corregir y confirmar desde la pantalla de depura-ción, pero puede que sea útil en la explotación el poder controlar la parte móvil y corregir los fallos desde una consola. La aplicación dispone de toda la información y comandos necesarios para ello.
Señalización de los fallos
El módulo ofrece numerosa información en forma de bits y palabras de estado, a las que se puede acceder mediante el programa PL7. Estos bits permiten tratar los fa-llos de modo jerárquico:l para actuar sobre el programa principal,l para señalar simplemente el fallo.
Niveles de señalización
Se proporcionan dos niveles de señalización:1er nivel: información general
Nota: en caso de apertura de la entrada de parada de urgencia, o de no validar el traductor (%Qxy.i.10=0), no se efectúa la fase de deceleración y la parada es in-mediata. Por el contrario, la aparición de información de pérdida de paso no se considera como un fallo con bloqueo, simplemente se indica a la aplicación.
Bit Fallo
%Ixy.i.ERR Fallo de vía
AX_OK (%Ixy.i.3) Ni se ha detectado ningún fallo con bloqueo (con parada de la parte móvil)
AX_FLT (%Ixy.i.2) Fallo (reagrupa el conjunto de los fallos)
HD_ERR (%Ixy.i.4) Fallo de equipo externo
AX_ERR (%Ixy.i.5) Fallo de la aplicación
CMD_NOK (%Ixy.i.6) Comando rechazado
TLX DS 57 PL7 40S 09.2000 105

Programación
2º nivel: información detalladaPalabras de estado de fallo del módulo y del eje (%MWxy.i.2 y %MWxy.i.3), estas palabras se obtienen mediante las peticiones de intercambios explícitos descritas en los objetos de lenguaje (Véase Los objetos de lenguaje de la función específica de comando de ejes de paso a paso, p. 175).
Confirmación de los fallos
Cuando aparece un fallo:l Los bits de fallo AX_FLT, HD_ERR, AX_ERR y los bits extraídos de las palabras
de estado relacionadas con el fallo se posicionan en 1.l Si el fallo es con bloqueo, el bit AX_OK se posiciona en 0.Cuando el fallo desaparece, todos los bits de fallo permanecen en su estado. Se almacena el fallo hasta obtener la confirmación mediante la puesta a 1 del bit ACK_DEF %Qxy.i.9 (o reinicialización del módulo). La confirmación se debe reali-zar tras la desaparición del fallo (excepto en el caso de fallos de topes de programa)Si se detectan varios fallos, la orden de confirmación sólo actúa sobre los fallos que han desaparecido realmente. Los fallos aún presentes se deberán confirmar de nuevo tras su desaparición.
Nota: Ante un fallo con bloqueo, se debería detener la evolución del tratamiento secuencial al que está asociado el eje y corregir el fallo controlando la parte móvil en modo manual. La corrección del fallo debe ir seguida de una confirmación del fallo.
Nota: La confirmación de un fallo también se puede efectuar durante la inicializa-ción del autómata, o cuando se acepta un nuevo comando correcto, en el caso de un fallo de comando rechazado
106 TLX DS 57 PL7 40S 09.2000
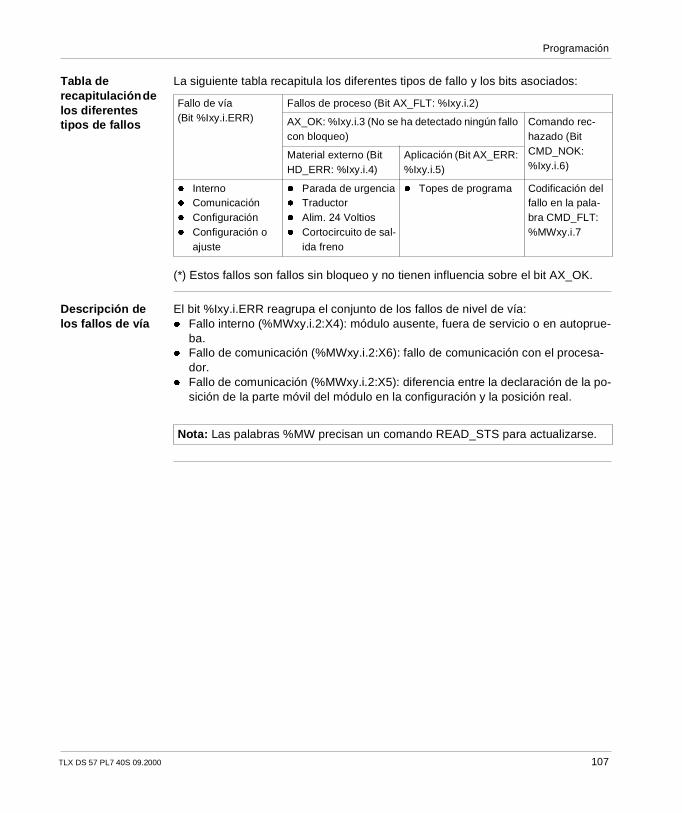
Programación
Tabla de recapitulación de los diferentes tipos de fallos
La siguiente tabla recapitula los diferentes tipos de fallo y los bits asociados:
(*) Estos fallos son fallos sin bloqueo y no tienen influencia sobre el bit AX_OK.
Descripción de los fallos de vía
El bit %Ixy.i.ERR reagrupa el conjunto de los fallos de nivel de vía:l Fallo interno (%MWxy.i.2:X4): módulo ausente, fuera de servicio o en autoprue-
ba.l Fallo de comunicación (%MWxy.i.2:X6): fallo de comunicación con el procesa-
dor.l Fallo de comunicación (%MWxy.i.2:X5): diferencia entre la declaración de la po-
sición de la parte móvil del módulo en la configuración y la posición real.
Fallo de vía(Bit %Ixy.i.ERR)
Fallos de proceso (Bit AX_FLT: %Ixy.i.2)
AX_OK: %Ixy.i.3 (No se ha detectado ningún fallo con bloqueo)
Comando rec-hazado (Bit CMD_NOK: %Ixy.i.6)
Material externo (Bit HD_ERR: %Ixy.i.4)
Aplicación (Bit AX_ERR: %Ixy.i.5)
l Internol Comunicaciónl Configuraciónl Configuración o
ajuste
l Parada de urgencial Traductorl Alim. 24 Voltiosl Cortocircuito de sal-
ida freno
l Topes de programa Codificación del fallo en la pala-bra CMD_FLT: %MWxy.i.7
Nota: Las palabras %MW precisan un comando READ_STS para actualizarse.
TLX DS 57 PL7 40S 09.2000 107

Programación
Descripción de los fallos de equipo externos
Presentación Estos fallos se señalan mediante el bit HD_ERR (%Ixy.i.4). Estos fallos son fallos con bloqueo y no se pueden desactivar.
Parada de urgencia
La siguiente tabla indica la causa, la señalización y la solución que se debe aplicar en el caso de un fallo Parada de urgencia:
Alimentación 24V
La siguiente tabla indica la causa, la señalización y la solución que se debe aplicar en el caso de un fallo Alimentación 24 V :
Cortocircuito de la salida freno
La siguiente tabla indica la causa, la señalización y la solución que se debe aplicar en el caso de un fallo Cortocircuito de la salida freno:
Causa Circuito abierto entre 24 V y la entrada de Parada de urgencia en el panel frontal del módulo
Parámetro Ninguno
Consecuencia La parte móvil se ve forzada a parar
Señalización Bit EMG_STOP (%Ixy.i.29) y EMG_STP (%MWxy.i.3:X5)
Solución Restablecer la conexión de la entrada en 24 V y confirmar el fallo.
Causa Fallo de alimentación 24 V
Parámetro Ninguno
Consecuencia El eje no está referenciado, la parte móvil se ve forzada a parar
Señalización Bit AUX_SUP (%MWxy.i.3:X6)
Solución Restablecer la conexión y confirmar el fallo
Causa Cortocircuito detectado en la salida freno del módulo
Parámetro Ninguno
Consecuencia El eje no está referenciado, la parte móvil se ve forzada a parar
Señalización Bit BRAKE_FLT (%MWxy.i.3:X1)
Solución Suprimir el cortocircuito y confirmar el fallo
108 TLX DS 57 PL7 40S 09.2000

Programación
Traductor La siguiente tabla indica la causa, la señalización y la solución que se debe aplicar en el caso de un fallo Traductor:
Causa La entrada de control del traductor no recibe el nivel traductor correcto definido en la configuración de la vía
Parámetro Ninguno
Consecuencia El eje no está referenciado, la parte móvil se ve forzada a parar
Señalización Bit DRIVE_FLT (%MWxy.i.3:X2)
Solución Suprimir el fallo de traductor y confirmar el fallo
TLX DS 57 PL7 40S 09.2000 109
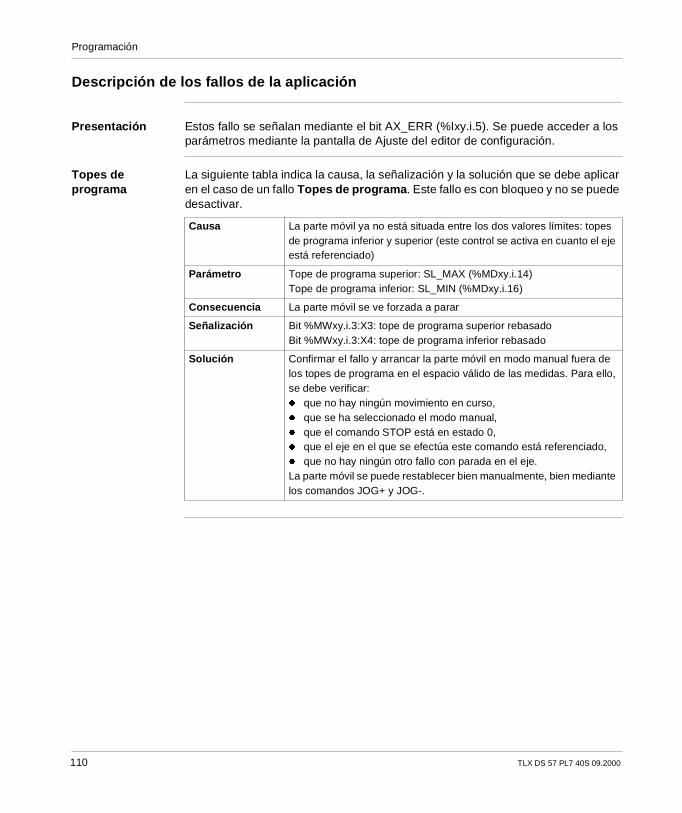
Programación
Descripción de los fallos de la aplicación
Presentación Estos fallo se señalan mediante el bit AX_ERR (%Ixy.i.5). Se puede acceder a los parámetros mediante la pantalla de Ajuste del editor de configuración.
Topes de programa
La siguiente tabla indica la causa, la señalización y la solución que se debe aplicar en el caso de un fallo Topes de programa. Este fallo es con bloqueo y no se puede desactivar.
Causa La parte móvil ya no está situada entre los dos valores límites: topes de programa inferior y superior (este control se activa en cuanto el eje está referenciado)
Parámetro Tope de programa superior: SL_MAX (%MDxy.i.14)Tope de programa inferior: SL_MIN (%MDxy.i.16)
Consecuencia La parte móvil se ve forzada a parar
Señalización Bit %MWxy.i.3:X3: tope de programa superior rebasadoBit %MWxy.i.3:X4: tope de programa inferior rebasado
Solución Confirmar el fallo y arrancar la parte móvil en modo manual fuera de los topes de programa en el espacio válido de las medidas. Para ello, se debe verificar: l que no hay ningún movimiento en curso,l que se ha seleccionado el modo manual,l que el comando STOP está en estado 0,l que el eje en el que se efectúa este comando está referenciado,l que no hay ningún otro fallo con parada en el eje.La parte móvil se puede restablecer bien manualmente, bien mediante los comandos JOG+ y JOG-.
110 TLX DS 57 PL7 40S 09.2000
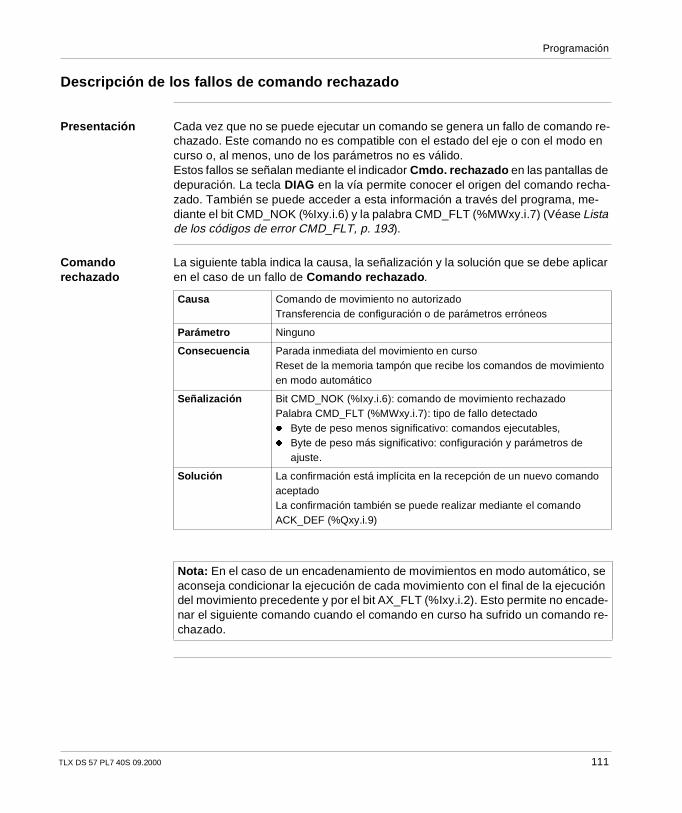
Programación
Descripción de los fallos de comando rechazado
Presentación Cada vez que no se puede ejecutar un comando se genera un fallo de comando re-chazado. Este comando no es compatible con el estado del eje o con el modo en curso o, al menos, uno de los parámetros no es válido.Estos fallos se señalan mediante el indicador Cmdo. rechazado en las pantallas de depuración. La tecla DIAG en la vía permite conocer el origen del comando recha-zado. También se puede acceder a esta información a través del programa, me-diante el bit CMD_NOK (%Ixy.i.6) y la palabra CMD_FLT (%MWxy.i.7) (Véase Lista de los códigos de error CMD_FLT, p. 193).
Comando rechazado
La siguiente tabla indica la causa, la señalización y la solución que se debe aplicar en el caso de un fallo de Comando rechazado.
Causa Comando de movimiento no autorizadoTransferencia de configuración o de parámetros erróneos
Parámetro Ninguno
Consecuencia Parada inmediata del movimiento en cursoReset de la memoria tampón que recibe los comandos de movimiento en modo automático
Señalización Bit CMD_NOK (%Ixy.i.6): comando de movimiento rechazadoPalabra CMD_FLT (%MWxy.i.7): tipo de fallo detectadol Byte de peso menos significativo: comandos ejecutables,l Byte de peso más significativo: configuración y parámetros de
ajuste.
Solución La confirmación está implícita en la recepción de un nuevo comando aceptadoLa confirmación también se puede realizar mediante el comando ACK_DEF (%Qxy.i.9)
Nota: En el caso de un encadenamiento de movimientos en modo automático, se aconseja condicionar la ejecución de cada movimiento con el final de la ejecución del movimiento precedente y por el bit AX_FLT (%Ixy.i.2). Esto permite no encade-nar el siguiente comando cuando el comando en curso ha sufrido un comando re-chazado.
TLX DS 57 PL7 40S 09.2000 111

Programación
Gestión del modo manual
Presentación Se deberá seleccionar y controlar el modo manual desde la pantalla de depuración así como a través del programa de la aplicación desde un panel frontal o una con-sola de diálogo operadora o de supervisión.En este caso, el diálogo se programa en lenguaje de contactos, lista de instruccio-nes o literal mediante los comandos elementales (desplazamientos, punto de ori-gen…).
Selección del modo manual
Se lleva a cabo mediante la asignación del valor 2 en la palabra MOD_SEL (%QWxy.i.0).Al pasar el modo en curso al modo manual, se fuerza la parada de la parte móvil si hay un movimiento en curso. El modo manual es efectivo desde le momento en el que la parte móvil está parada.Cuando se tiene en cuenta el comando de paso en modo manual, el bit IN_MANU ( %Ixy.i.22) se pone en la posición 1.
Ejecución de los comandos manuales
Los comandos elementales asociados al modo manual y a los que se puede acce-der a través de bits de comandos %Qx.i.j son los siguientes:l Desplazamiento a vista en el sentido + JOG_P (%Qxy.i.1).l Desplazamiento a vista en el sentido - JOG_M (%Qxy.i.2).l Desplazamiento incremental en el sentido + INC_P (%Qxy.i.3).l Desplazamiento incremental en el sentido - INC_M (%Qxy.i.4).l Punto de origen manual SET_RP (%Qxy.i.5).l Punto de origen forzado RP_HERE (%Qxy.i.6).Estos comandos son equivalentes a aquéllos a los que se puede acceder desde la pantalla de depuración del módulo TSX CFY.Comandos manuales:
-
Commands
INC - INC +
Punto de origen forzado
Salida auxiiar
JOG +JOG
Punto de origen manual
112 TLX DS 57 PL7 40S 09.2000

Programación
Condiciones generales de ejecución de los comandos en modo manual
Las siguientes condiciones se deben realizar para ejecutar los comandos en modo manual:l Posición de destino comprendida dentro de los topes de programa.l Eje sin fallo con bloqueo (bit AX_OK: %Ixy.i.3 = 1).l No hay ningún comando ejecutándose (bit DONE: %Ixy.i.1 = 1).l Comando STOP (%Qxy.i.8) inactiva el bit de validación del relé del traductor
ENABLE (%Qxy.i.10) puestos en la posición 1.
Parada de un movimiento
La parada de un movimiento puede provocarse mediante:l La aparición del comando STOP (%Qxy.i.8) o el posicionamiento a 0 del bit ENA-
BLE (%Qxy.i.10) o la entrada STOP.l La aparición de un fallo con bloqueo.l El cambio de modo de funcionamiento.l La recepción de una configuración.l El paso a tope de fin de recorrido positivo (o negativox) durante un desplaza-
miento en el sentido positivo (o negativo).
Nota: Salvo en el caso de fallo de topes de programa, para los comandos JOG_P y JOG_M y tras la confirmación del fallo.
TLX DS 57 PL7 40S 09.2000 113

Programación
Comandos de desplazamiento a vista
Presentación Para efectuar un desplazamiento a vista, se deben utilizar los comandos manuales JOG_P y JOG_M. Los bits JOG_P (%Qxy.i.1) y JOG_M (%Qxy.i.2) dirigen el desplazamiento de la parte móvil en el sentido negativo y positivo. El operador debe seguir visualmente la posición de la parte móvil. El desplazamiento se realiza si el comando está pre-sente y no le inhibe ningún comando STOP ni ningún fallo.Los comandos JOG_P y JOG_M se tienen en cuenta en el flanco y se mantienen activos sobre estado, indiferentemente en eje referenciado o no referenciado.
Velocidad de desplazamiento
El desplazamiento se lleva a cabo a la velocidad del modo manual MAN_SPD, de-finida en la pantalla de ajuste (o en la palabra doble %MDxy.i.20).La velocidad se puede modular durante el movimiento mediante el coeficiente CMV (%QWxy.i.1).Cualquier velocidad de desplazamiento superior a FMAX (velocidad máxima del eje definido en la configuración) tiene una limitación de cresta al valor FMAX.Velocidad de desplazamiento de la parte móvil:
Velocidad
Tiempo
Tiempo
Tiempo
114 TLX DS 57 PL7 40S 09.2000

Programación
Observación de los comandos JOG_P y JOG_M
l Los comandos JOG_P y JOG_M permiten arrancar la parte móvil cuando se de-tecta un fallo de topes de programa. Esto tiene lugar tras la confirmación previa del fallo.
l Si el bit JOG_P o JOG_M se pone en la posición 1 cuando se pasa a modo ma-nual, este comando no se tiene en cuenta. Sólo se tendrá en cuenta tras el po-sicionamiento a 0 y la puesta a 1 del bit (detección del flanco ascendente).
TLX DS 57 PL7 40S 09.2000 115
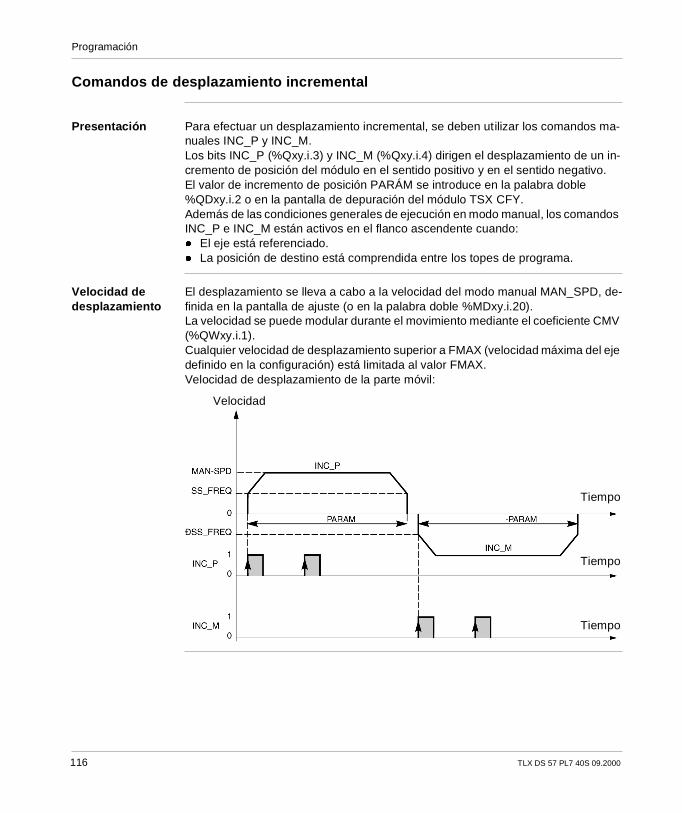
Programación
Comandos de desplazamiento incremental
Presentación Para efectuar un desplazamiento incremental, se deben utilizar los comandos ma-nuales INC_P y INC_M.Los bits INC_P (%Qxy.i.3) y INC_M (%Qxy.i.4) dirigen el desplazamiento de un in-cremento de posición del módulo en el sentido positivo y en el sentido negativo.El valor de incremento de posición PARÁM se introduce en la palabra doble %QDxy.i.2 o en la pantalla de depuración del módulo TSX CFY.Además de las condiciones generales de ejecución en modo manual, los comandos INC_P e INC_M están activos en el flanco ascendente cuando:l El eje está referenciado.l La posición de destino está comprendida entre los topes de programa.
Velocidad de desplazamiento
El desplazamiento se lleva a cabo a la velocidad del modo manual MAN_SPD, de-finida en la pantalla de ajuste (o en la palabra doble %MDxy.i.20).La velocidad se puede modular durante el movimiento mediante el coeficiente CMV (%QWxy.i.1).Cualquier velocidad de desplazamiento superior a FMAX (velocidad máxima del eje definido en la configuración) está limitada al valor FMAX. Velocidad de desplazamiento de la parte móvil:
Velocidad
Tiempo
Tiempo
Tiempo
116 TLX DS 57 PL7 40S 09.2000
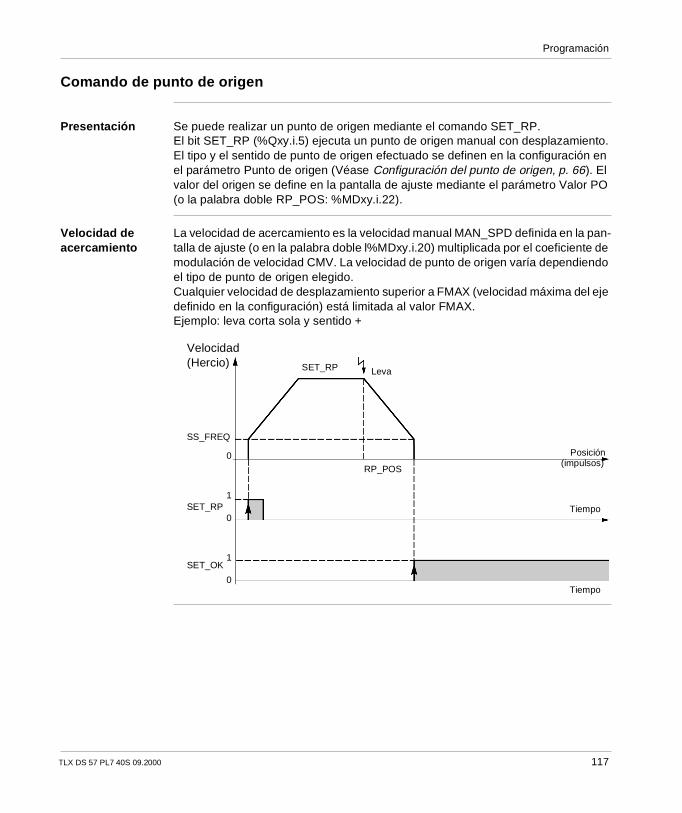
Programación
Comando de punto de origen
Presentación Se puede realizar un punto de origen mediante el comando SET_RP.El bit SET_RP (%Qxy.i.5) ejecuta un punto de origen manual con desplazamiento.El tipo y el sentido de punto de origen efectuado se definen en la configuración en el parámetro Punto de origen (Véase Configuración del punto de origen, p. 66). El valor del origen se define en la pantalla de ajuste mediante el parámetro Valor PO (o la palabra doble RP_POS: %MDxy.i.22).
Velocidad de acercamiento
La velocidad de acercamiento es la velocidad manual MAN_SPD definida en la pan-talla de ajuste (o en la palabra doble l%MDxy.i.20) multiplicada por el coeficiente de modulación de velocidad CMV. La velocidad de punto de origen varía dependiendo el tipo de punto de origen elegido.Cualquier velocidad de desplazamiento superior a FMAX (velocidad máxima del eje definido en la configuración) está limitada al valor FMAX.Ejemplo: leva corta sola y sentido +
Velocidad
Tiempo
Tiempo
Leva(Hercio)
SS_FREQ
0
1
0
0
1
SET_RP
SET_OK
SET_RP
RP_POS
Posición(impulsos)
TLX DS 57 PL7 40S 09.2000 117

Programación
Comando de punto de origen forzado
Presentación Se puede realizar un punto de origen mediante el comando RP_HERE.El bit RP_HERE (%Qxy.i.6) efectúa un punto de origen forzado sin desplazamiento con el valor definido en el parámetro PARAM. Este valor se introduce en la palabra doble %QDxy.i.2 o en la pantalla de depuración del módulo TSX CFY 11/21.El comando de punto de origen forzado permite referenciar el eje sin realizar el des-plazamiento.
Nota: El comando RP_HERE no modifica el valor del parámetro RP_POS.El valor del parámetro PARÁM debe estar comprendido entre los topes de progra-ma.No se tolera ningún fallo con bloqueo durante la ejecución de este comando.
118 TLX DS 57 PL7 40S 09.2000

Programación
Gestión del modo directo (DIRDRIVE)
Presentación El modo DIRDRIVE permite simular el comando de eje sin hacer funcionar la parte operativa y se calcula toda la información de retroceso.El comportamiento del eje puede, de este modo, analizarse independientemente de la parte operativa..
Selección del modo directo
La selección del modo directo se lleva cabo mediante la asignación del valor 1 a la palabra MOD_SEL %QWxy.i.0.Durante un pedido de cambio de modo, hay una parada de la parte móvil y después cambio efectivo del modo. Cuando se tiene en cuenta el comando de paso a modo directo, el bit IN_DIRDR %Ixy.i.17 se pone en la posición 1.
Ejecución de los comandos en modo directo
El modo directo posee el comando de movimiento DIRDRV %Qxy.i.0.La variable PARAM %QDxy.i.2 transmite periódicamente la consigna de velocidad. El signo de esta variable da el sentido del desplazamiento. El traductor se dirige en velocidad entre SS_FREQ y FMAX. Estos valores se defi-nen en la pantalla de configuración (FMAX) y en la pantalla de ajuste (SS_FREQ).El bit ST_DIRDR (%Ixy.i.20) indica que un movimiento está en curso en el modo DIRDRIVE.
Ley de velocidad Tras el cambio de consigna, la salida alcanza la nueva consigna de acuerdo a una ley de velocidad trapezoidal con respeto de aceleración parametrada.
Velocidad (Hercio)
Posición
Tiempo
TLX DS 57 PL7 40S 09.2000 119

Programación
Ejecución del comando DIRDRIVE
Las condiciones generales de ejecución del comando DIRDRIVE son las siguien-tes:l Eje sin fallo con bloqueo (bit AX_OK: %Ixy.i.3 = 1).l Comando STOP (%Qxy.i.8) inactivo y el bit de validación del relé del traductor
ENABLE (%Qxy.i.10) puestos en la posición 1.l Parámetro PARAM (%QDxy.i.2) comprendido entre - FMAX y-SS_FREQ o entre
SS_FREQ yFMAX del eje seleccionado.
Parada de un movimiento
La parada de un movimiento puede provocarse mediante:l Aparición del comando STOP o bit de validación del relé del traductor ENABLE
(%Qxy.i.10) en el estado 0.l Aparición de un fallo con bloqueo o un fallo de topes de programa.l Cambio de modo de funcionamiento.l Recepción de una configuración.l Paso a tope de fin de recorrido positivo (o negativo) durante un desplazamiento
en el sentido positivo (negativo)
Nota: El control de los topes de programa permanece activo si el eje está referen-ciado. Para salvarse de este control, se debe provocar la pérdida de referencia del eje mediante una invalidación temporal ENABLE (%Qxy.i.10) a 0 y después medi-ante una validación mediante ENABLE a 1º pulsando el botón de validación.
120 TLX DS 57 PL7 40S 09.2000
Programación
Gestión del modo parada (OFF)
Presentación Este modo se utiliza principalmente para depuración desde el editor de configura-ción. Sin embargo, es posible controlarlo mediante programa. En este modo, el mó-dulo se mantiene pasivo pero sigue actualizando los datos de posición (%IDxy.i.0) y de velocidad actual (%IDxy.i.2).
Selección del modo parada
La selección del modo parada se lleva cabo mediante asignación del valor 0 a la palabra MOD_SEL %QWxy.i.0. El módulo selecciona también el modo parada cuando el autómata está en STOP. Está seleccionado por defecto después de la configuración de la vía.
Ejecución de los comandos en modo parada
El modo OFF no tiene asociado ningún comando de movimiento.El desplazamiento de la parte móvil no está controlado. Los controles de los fallos del equipo están inhibidos (salvo los controles de topes de programa).La salida de la validación del traductor se mantiene bajo control mediante el coman-do ENABLE (%Qxy.i.10).
TLX DS 57 PL7 40S 09.2000 121

Programación
122 TLX DS 57 PL7 40S 09.2000

TLX DS 57 PL7 40S 09.2000
6
Ajuste del comando de ejes paso a pasoPresentación
Objeto de este capítulo
Este capítulo describe el principio de ajuste de los parámetros: acceso a las panta-llas, descripción de los parámetros y procedimiento de ajuste.
Contenido Este capítulo contiene los siguiente apartados:
Apartado Página
Operaciones preliminares al ajuste 124
Acceso a los parámetros de ajuste 125
Ajuste de la trayectoria 127
Ajuste de la salida del freno 129
Ajuste del plano de parada 131
Ajuste de los parámetros del modo manual 133
Validación de los parámetros de ajuste 134
Guardado / Restitución de los parámetros de ajuste 135
Reconfiguración en modo conectado 136
123

Ajuste
Operaciones preliminares al ajuste
Condiciones preliminares
l Módulo(s) TSX CFY implantado(s) en el autómata,l Aplicación(es) de comando de ejes conectados al(a los) módulo(s) TSX CFY,l Terminal conectado al autómata a través del conector terminal o a través de la
red,l Configuración y programa de comandos de ejes realizados y transferidos en el
procesador del autómata,l Autómata en RUN. Se aconseja inhibir el programa de la aplicación de comando
de movimiento (mediante, por ejemplo, un bit de condición de ejecución del pro-grama), para facilitar las operaciones de ajuste.
Verificaciones preliminares
l Se deben verificar las conexiones,l Se debe verificar que los movimientos pueden realizarse sin peligro,l Se debe comprobar que los topes mecánicos están conectados conforme a las
normas de seguridad (generalmente actúan directamente sobre la secuencia de alimentación del traductor),
l Se debe verificar y ajustar el traductor de acuerdo a las instrucciones del fabri-cante,
124 TLX DS 57 PL7 40S 09.2000

Ajuste
Acceso a los parámetros de ajuste
Presentación Para acceder a los parámetros de ajuste, habrá de utilizarse el comando Ajuste del menú Ver de la pantalla de configuración del módulo TSX CFY. También, se puede seleccionarAjuste en la zona del módulo de la pantalla de configuración o de depu-ración.
Acceso a los parámetros
La pantalla de ajuste permite elegir la vía que se va a ajustar y da acceso a los pa-rámetros actuales o iniciales:
Parámetros iniciales
Los parámetros iniciales son: l Los parámetros introducidos (o definidos por defecto) en la pantalla de configu-
ración en modo local. Estos parámetros se han validado en la configuración y se han transferido al autómata.
l Los parámetros que se tienen en cuenta durante la última reconfiguración en modo conectado.
Parámetros actuales
Los parámetros actuales son los que se han modificado y validado desde la pantalla de ajuste en modo conectado (o a través del programa mediante un intercambio ex-plícito). Estos parámetros se reemplazan por los parámetros iniciales durante un rearranque en frío.
Comando Función
Elección de Eje Hay que elegir, por ejemplo, la vía 0.
Este botón permite mostrar, o bien los parámetros actuales, o bien los parámetros iniciales.
Nota: la fase de determinación de los parámetros de ajuste debe ir seguida oblig-atoriamente de una opción de guardado de parámetros.
TLX DS 57 PL7 40S 09.2000 125

Ajuste
Parámetros de ajuste
La pantalla de ajuste propone los siguientes parámetros:
Para visualizar toda la zona de parámetros de ajuste, se deben seleccionar los co-mandos: Ver → Zona del módulo o Ver → Zona de la vía (para restituir estas zo-nas, se deben efectuar los mismos comandos).
Nota: para cada parámetro, los límites se muestran en la barra de estado.
CONNECTE U:SYSRUNAceleración: [9 155, 100 000]
PL7 Junior: AXIS - [TSX CFY 21 [RACK 0 POSITION 3]]
RUNRUN
Archivo Edición Servicios Aplicación Autómata Depuración Opciones VentanaVista ?
STOP
TSX CFY 21 [RACK 0 POSITION 3]
200 Duración
Tiempo de la desactivación Tiempo de la activación
500 000
-1 000 000
50
5 000
0
0 0
Parámetros del modo manual
Plano de parada Trayectoria
Salida freno
Hercio
Hercios/s
Impulsos
Frecuencia de arranque/parada
Aceleración
Tope de programa superior Tope de programa inferior
Velocidad
Valor PO
ms
Hercio
impulso
msms
Impulsos
50 000
126 TLX DS 57 PL7 40S 09.2000
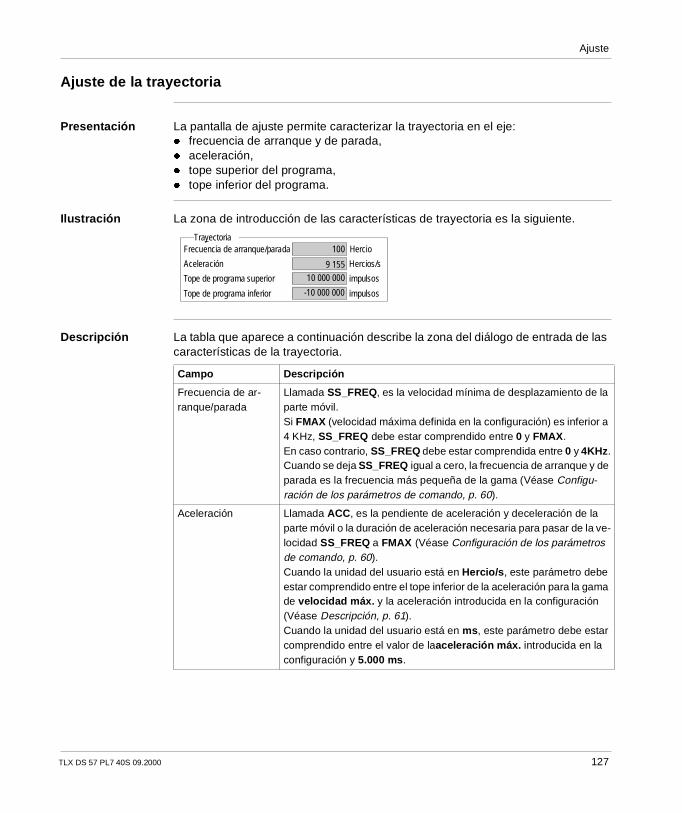
Ajuste
Ajuste de la trayectoria
Presentación La pantalla de ajuste permite caracterizar la trayectoria en el eje:l frecuencia de arranque y de parada,l aceleración,l tope superior del programa,l tope inferior del programa.
Ilustración La zona de introducción de las características de trayectoria es la siguiente.
Descripción La tabla que aparece a continuación describe la zona del diálogo de entrada de las características de la trayectoria.
TrayectoriaFrecuencia de arranque/parada
Aceleración
Tope de programa superior
Tope de programa inferior
Hercio
Hercios/s
impulsos
impulsos
100
9 155
10 000 000
-10 000 000
Campo Descripción
Frecuencia de ar-ranque/parada
Llamada SS_FREQ, es la velocidad mínima de desplazamiento de la parte móvil.Si FMAX (velocidad máxima definida en la configuración) es inferior a 4 KHz, SS_FREQ debe estar comprendido entre 0 y FMAX. En caso contrario, SS_FREQ debe estar comprendida entre 0 y 4KHz.Cuando se deja SS_FREQ igual a cero, la frecuencia de arranque y de parada es la frecuencia más pequeña de la gama (Véase Configu-ración de los parámetros de comando, p. 60).
Aceleración Llamada ACC, es la pendiente de aceleración y deceleración de la parte móvil o la duración de aceleración necesaria para pasar de la ve-locidad SS_FREQ a FMAX (Véase Configuración de los parámetros de comando, p. 60).Cuando la unidad del usuario está en Hercio/s, este parámetro debe estar comprendido entre el tope inferior de la aceleración para la gama de velocidad máx. y la aceleración introducida en la configuración (Véase Descripción, p. 61).Cuando la unidad del usuario está en ms, este parámetro debe estar comprendido entre el valor de laaceleración máx. introducida en la configuración y 5.000 ms.
TLX DS 57 PL7 40S 09.2000 127
Ajuste
Tope superior del programa
Llamada SLMAX y expresada en número de impulsiones, es la posición de desplazamiento máxima de la parte móvil en sentido pos-itivo.
Tope inferior del pro-grama
Llamada SLMIN y expresada en número de impulsiones, es la posición de desplazamiento mínima de la parte móvil en sentido neg-ativo.
Los topes del programa deben respetar las desigualdades siguientes:l SLMIN inferior o igual SLMAXl SLMIN y SLMAX comprendidas entre -16 777 216 y 16 777 215Cuando los dos topes del programa SLMIN y SLMAX son iguales a cero, el control de dichos topes de programa no está activo. Los movimientos pueden ejecutarse sobre la totalidad del margen de contaje de -16 777 216 a + 16 777 215, pero sin sobrepasar ninguno de estos límites.
Campo Descripción
128 TLX DS 57 PL7 40S 09.2000

Ajuste
Ajuste de la salida del freno
Presentación La pantalla de ajuste permite parametrizar la salida del freno cuando seleccionó en la configuración la gestión automática del freno. Es posible definir el tiempo:l en la activación,l en la desactivación.
Ilustración La zona de introducción de los tiempos de espera, al activar y al desactivar, es la siguiente.
Salida frenoTiempo de la desactivación ms5 Tiempo de la activación 0 ms
TLX DS 57 PL7 40S 09.2000 129

Ajuste
Descripción La tabla que aparece a continuación describe la zona del diálogo de entrada de los tiempos de espera al activar y al desactivar.
Campo Descripción
Tiempo de espera al activar
Este parámetro está comprendido entre -1000 y 1000 milisegundos. Cuando el valor es negativo, indica una anticipación al final del mov-imiento. Cuando es positivo, señala un retardo.
Tiempo de espera al desactivar
Este parámetro está comprendido entre -1000 y 1000 milisegundos. Cuando el valor es negativo, indica una anticipación al principio del movimiento. Cuando es positivo, señala un retardo.
Diagrama de funcionamiento de tiempo de retraso en la salida del Freno.
1 Anticipación, tiempo de espera al desactivar, valor negativo.
2 Retardo, tiempo de espera al desactivar, valor positivo.
3 Anticipación, tiempo de espera al activar, valor negativo.
4 Retardo, tiempo de espera al activar, valor positivo.
(1)
(2)
(3)
(4)
130 TLX DS 57 PL7 40S 09.2000

Ajuste
Ajuste del plano de parada
Presentación Este campo es la duración de consigna del plano de parada cuando la velocidad es igual a la velocidad de arranque y de parada FDA. Esta duración debe estar com-prendida entre 0 y 1000 ms.Existe una relación entre la duración del plano de parada y el tiempo de espera al activar el freno (cuando este tiempo es negativo) cuando la gestión automática (Véase Configuración del freno del motor paso a paso, p. 64) del freno está confi-gurada.
TLX DS 57 PL7 40S 09.2000 131
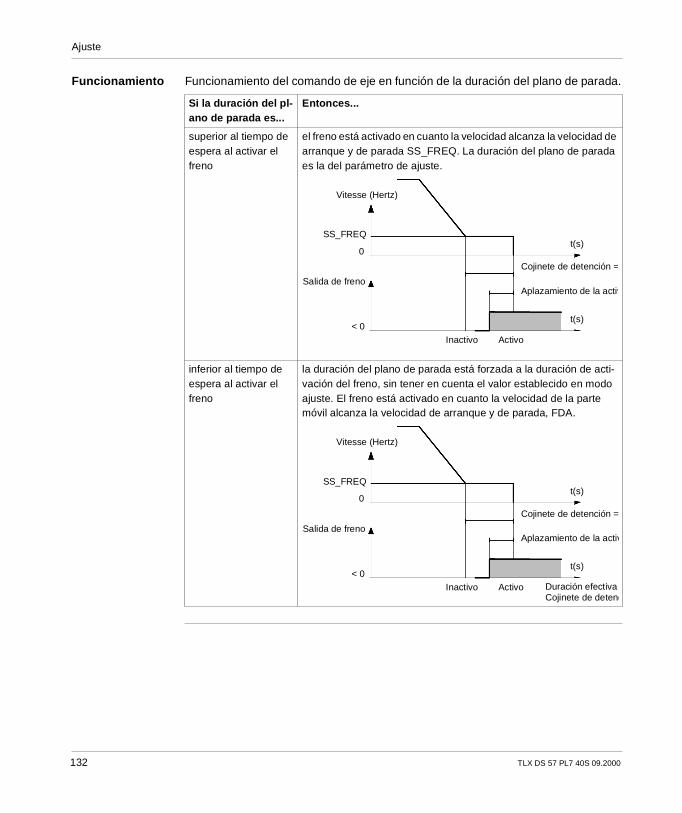
Ajuste
Funcionamiento Funcionamiento del comando de eje en función de la duración del plano de parada.
Si la duración del pl-ano de parada es...
Entonces...
superior al tiempo de espera al activar el freno
el freno está activado en cuanto la velocidad alcanza la velocidad de arranque y de parada SS_FREQ. La duración del plano de parada es la del parámetro de ajuste.
inferior al tiempo de espera al activar el freno
la duración del plano de parada está forzada a la duración de acti-vación del freno, sin tener en cuenta el valor establecido en modo ajuste. El freno está activado en cuanto la velocidad de la parte móvil alcanza la velocidad de arranque y de parada, FDA.
Vitesse (Hertz)
SS_FREQ
0
Salida de freno
< 0
Inactivo Activo
Aplazamiento de la activ
Cojinete de detención =
t(s)
t(s)
Vitesse (Hertz)
SS_FREQ
0
Salida de freno
< 0
Inactivo Activo
Aplazamiento de la activ
Cojinete de detención =
t(s)
t(s)
Duración efectiva Cojinete de detenc
132 TLX DS 57 PL7 40S 09.2000

Ajuste
Ajuste de los parámetros del modo manual
Presentación El ajuste de los parámetros del modo manual permite definir el comportamiento de la parte móvil en modo manual (Véase Gestión del modo manual, p. 112). Estos pa-rámetros son dos:l la velocidad,l el valor del punto de origen.
Ilustración La zona de introducción de los parámetros del modo manual es la siguiente.
Descripción La tabla que aparece a continuación describe la zona de diálogo de entrada de los parámetros del modo manual.
Parámetros del modo manual
Velocidad
Valor PO
Hercio
impulsos
300
10 000
Campo Descripción
Velocidad Es la velocidad de desplazamiento, MAN_SPD, de la parte móvil en modo manual.El valor del campo determina la velocidad de desplazamiento de la parte móvil en modo manual, cuando está determinado por las instruc-ciones JOG+, JOG-, INC+, INC- y la velocidad de acercamiento y de parada en SET_RP, etc. El valor de este campo debe estar compren-dido entre la velocidad de arranque y de parada SS_FREQ y la ve-locidad máxima FMAX definida en la configuración (Véase Configuración de los parámetros de comando, p. 60).Como en el modo automático, la velocidad real de desplazamiento está modulada por el coeficiente de modulación CMV.
Valor PO Es el valor de la posición actual al tomar un punto de origen en modo manual.El valor del campo Punto de origen, RP_POS, se transfiere a la posición instantánea, X_POS, al tomar un punto de origen manual cuando el comando del eje se encuentra en modo manual.En el caso general, el valor de este campo debe estar comprendido entre SLMIN y SLMAX. En el caso particular en el que SLMIN=SL-MAX=0, el valor de este campo debe estar comprendido entre -16 777 216 y 16 777 215.
TLX DS 57 PL7 40S 09.2000 133

Ajuste
Validación de los parámetros de ajuste
Presentación Cuando se introducen los parámetros de ajuste, hay que validar estos parámetros mediante el comando Edición/Validar o mediante la activación del icono
Parámetros fuera de los límites
Si uno o varios valores de los parámetros no están comprendidos dentro de los lí-mites autorizados, aparece un mensaje de error que menciona el parámetro impli-cado.Es necesario corregirlo o bien corregir los parámetros en fallo y volver a realizar una validación.
No hay modificación de los parámetros de configuración
Si no se han modificado los parámetros de configuración, la modificación de los pa-rámetros de ajuste no interrumpe el funcionamiento del eje pero modifica su com-portamiento.Los parámetros de ajuste modificados sin los parámetros actuales (los parámetros iniciales no se alteran).
Nota: Con rearranque en frío, los parámetros actuales se reemplazan por los parámetros iniciales.Los parámetros iniciales pueden actualizarse mediante el comando Guardar o me-diante una operación de reconfiguración.
Pantalla deajuste
Parámetrosde ajusteactuales
Parámetrosde ajusteiniciales
Parámetrosde ajusteactuales
Rearranque en frío
Procesador del autómata Vía de comando de ejes
134 TLX DS 57 PL7 40S 09.2000

Ajuste
Guardado / Restitución de los parámetros de ajuste
Guardado de los parámetros
Para guardar los parámetros actuales (actualización de los parámetros iniciales), se debe activar el comando Servicios → Guardar los parámetros .
Restitución de los parámetros
Para reemplazar los parámetros actuales por los valores iniciales, se debe activar el comando Servicios → Restaurar los parámetros .
Parámetrosde ajusteactuales
Parámetrosde ajusteiniciales
Parámetrosde ajusteactuales
Procesador del autómata Vía de comando de ejes
Guardar los parámetros
Nota: La instrucción RESTORE_PARAM permite a la aplicación efectuar esta op-eración de restitución. La restitución también se realiza de modo automático du-rante un rearranque en frío.
Parámetrosde ajusteactuales
Parámetrosde ajusteiniciales
Parámetrosde ajusteactuales
Procesador del autómata Vía de comando de ejes
Restaurar los parámetros
TLX DS 57 PL7 40S 09.2000 135
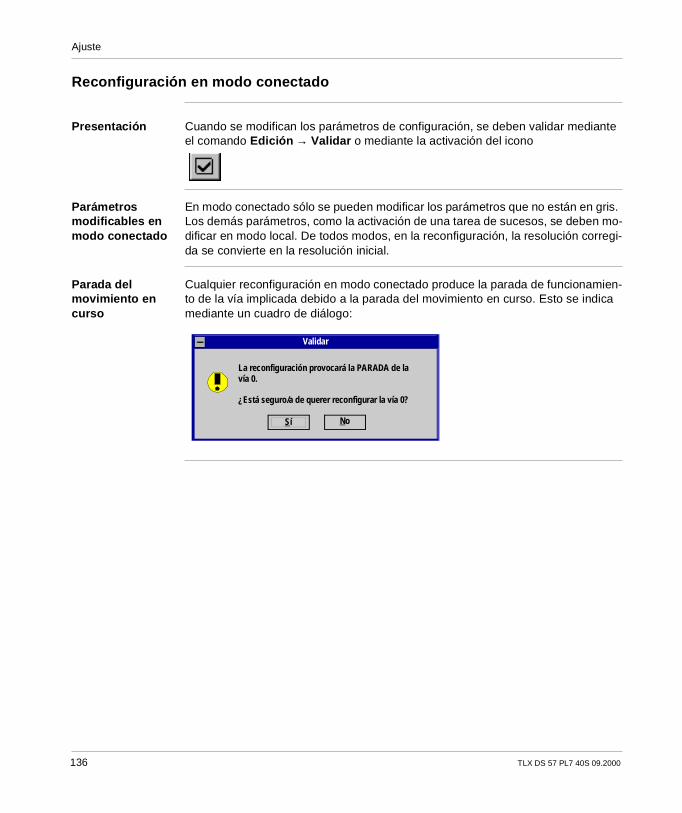
Ajuste
Reconfiguración en modo conectado
Presentación Cuando se modifican los parámetros de configuración, se deben validar mediante el comando Edición → Validar o mediante la activación del icono
Parámetros modificables en modo conectado
En modo conectado sólo se pueden modificar los parámetros que no están en gris. Los demás parámetros, como la activación de una tarea de sucesos, se deben mo-dificar en modo local. De todos modos, en la reconfiguración, la resolución corregi-da se convierte en la resolución inicial.
Parada del movimiento en curso
Cualquier reconfiguración en modo conectado produce la parada de funcionamien-to de la vía implicada debido a la parada del movimiento en curso. Esto se indica mediante un cuadro de diálogo:
Sí No
La reconfiguración provocará la PARADA de lavía 0.
¿Está seguro/a de querer reconfigurar la vía 0?
Validar
136 TLX DS 57 PL7 40S 09.2000
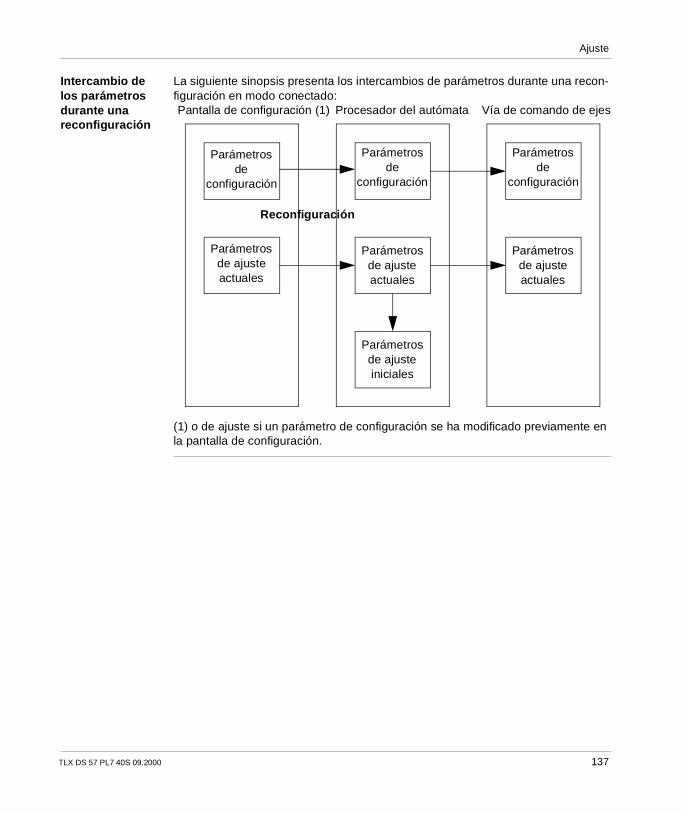
Ajuste
Intercambio de los parámetros durante una reconfiguración
La siguiente sinopsis presenta los intercambios de parámetros durante una recon-figuración en modo conectado:
(1) o de ajuste si un parámetro de configuración se ha modificado previamente en la pantalla de configuración.
Parámetrosde
configuración
Parámetrosde ajusteactuales
Parámetrosde
configuración
Parámetrosde ajusteactuales
Parámetrosde ajusteiniciales
Parámetrosde
configuración
Parámetrosde ajusteactuales
Pantalla de configuración (1) Procesador del autómata Vía de comando de ejes
Reconfiguración
TLX DS 57 PL7 40S 09.2000 137

Ajuste
138 TLX DS 57 PL7 40S 09.2000

TLX DS 57 PL7 40S 09.2000
7
Depuración de un programa de comando de ejes de paso a pasoPresentación
Objeto de este capítulo
Este capítulo describe las funciones de depuración de una vía de comando de eje, en los diferentes modos: parada, directo, manual, automático. También describe la pantalla de diagnóstico que da acceso a los posibles fallos.
Contenido Este capítulo contiene los siguiente apartados:
Apartado Página
Principio de Depuración 140
Interfaz de usuario de la pantalla de depuración 142
Descripción de las pantallas de depuración 144
Detalle de las informaciones de la pantalla de depuración 146
Modo parada (Off) 151
Modo Directo (Dir Drive) 152
Modo manual (Manu) 153
Modo automático (Auto) 154
Diagnóstico de la vía 155
Archivado, documentación y simulación 157
139
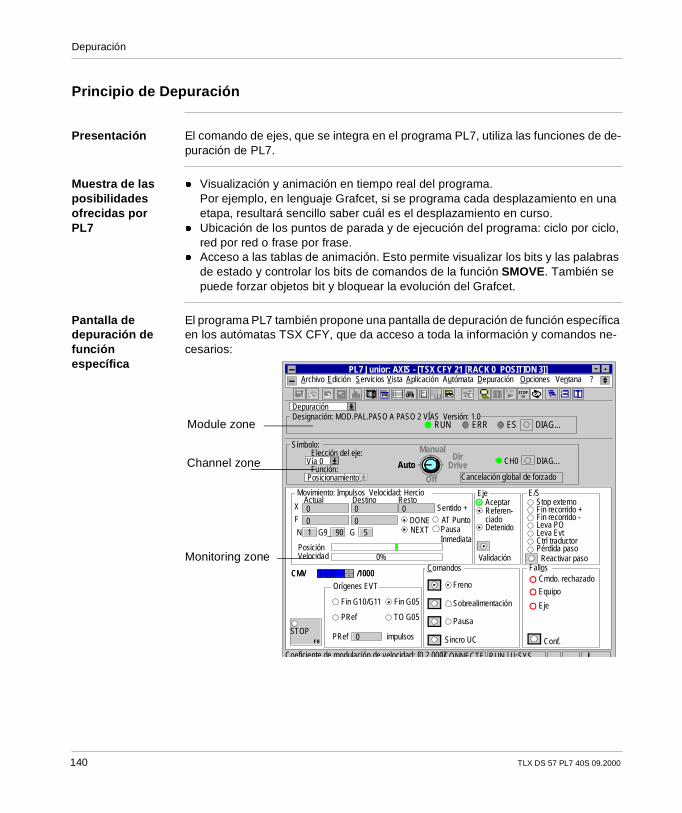
Depuración
Principio de Depuración
Presentación El comando de ejes, que se integra en el programa PL7, utiliza las funciones de de-puración de PL7.
Muestra de las posibilidades ofrecidas por PL7
l Visualización y animación en tiempo real del programa. Por ejemplo, en lenguaje Grafcet, si se programa cada desplazamiento en una etapa, resultará sencillo saber cuál es el desplazamiento en curso.
l Ubicación de los puntos de parada y de ejecución del programa: ciclo por ciclo, red por red o frase por frase.
l Acceso a las tablas de animación. Esto permite visualizar los bits y las palabras de estado y controlar los bits de comandos de la función SMOVE. También se puede forzar objetos bit y bloquear la evolución del Grafcet.
Pantalla de depuración de función específica
El programa PL7 también propone una pantalla de depuración de función específica en los autómatas TSX CFY, que da acceso a toda la información y comandos ne-cesarios:
00
00
0DONE
Stop externoFin recorrido +Fin recorrido -Leva PO
Sentido +XF
Validación
Destino Resto Movimiento: Impulsos Velocidad: Hercio E/S
Actual
F8
Referen-ciadoDetenido
EjeAceptar
AT Punto
PosiciónVelocidad 0%
STOP
CONNECTE U:SYSRUNCoeficiente de modulación de velocidad: [0,2 000]
PL7 Junior: AXIS - [TSX CFY 21 [RACK 0 POSITION 3]]
RUNRUN
Archivo Edición Servicios Aplicación Autómata Depuración Opciones VentanaVista ?
Depuración Designación: MOD.PAL.PASO A PASO 2 VÍAS Versión: 1.0
Símbolo:Elección del eje:
Función:Posicionamiento
Vía 0
Cancelación global de forzado
CH0 DIAG...Auto
Off
ERRRUN ES DIAG...
DirDrive
Manual
STOP
Cmdo. rechazado
Equipo
Eje
Fallos
Pausa
Sincro UC Conf.
Comandos
Freno
Sobrealimentación
Leva EvtCtrl traductorPérdida paso
Reactivar paso
/1000CMV 1 000 /1000CMV
impulsos
NEXT Pausa Inmediata
0PRef
Orígenes EVT
Fin G10/G11
PRef
Fin G05
TO G05
N G9_ G 5901
Module zone
Channel zone
Monitoring zone
140 TLX DS 57 PL7 40S 09.2000

Depuración
Esta pantalla comprende tres zonas:l Zona de módulo,l Zona de vía,l Una zona de control de la parte móvil y del programa. Esta zona depende del
modo de funcionamiento que se haya elegido mediante el conmutador de modo: Automático (Auto), Manual (Manu), Directo (Dir Drive) o Parada (Off).
TLX DS 57 PL7 40S 09.2000 141
Depuración
Interfaz de usuario de la pantalla de depuración
Acceso a la pantalla de depuración
Sólo se puede acceder a la pantalla de depuración si el terminal está en modo co-nectado.Si ese es el caso, se debe acceder a la pantalla de depuración del siguiente modo:l Seleccione el editor de Configuración,l Seleccione y valide (o haga doble clic) la posición del rack que contiene el mó-
dulo de comando de ejes,l Por defecto, la pantalla de depuración se visualiza en modo conectado.
Botones de comando
El funcionamiento de los botones de comando es el siguiente:
l Para los comandos sobre estado (excepto los comandos JOG):Al pulsar y soltar el botón se activa el comando asociado. El indicador interno del botón se enciende cuando este comando se toma en cuenta (el bit de comando %Q correspondiente se pone en la posición 1). Al volver a pulsar y soltar el botón se desactiva el comando. El indicador interno del botón se apaga cuando este comando se toma en cuenta (el bit de comando %Q correspondiente se posiciona en 0).
l Para los comandos sobre flanco:El comando se activa cuando se pulsa y luego suelta el botón. El indicador inter-no del botón se enciende y se apaga automáticamente.
El indicador situado al lado del botón señala que el módulo ha tomado en cuenta el comando.
Campo de introducción
Todos los valores insertados en un campo de introducción se deben validar median-te la tecla
Utilización del teclado
Se puede utilizar el teclado para navegar por la pantalla o activar un comando:
Teclas Acción
Mayús F2 Permite pasar de una zona a otra
Tab En una misma zona, permite pasar de un conjunto de comandos a otro
Teclas de cursor En un conjunto de comandos, permiten pasar de un comando a otro
Barra Espaciadora Permite activar o desactivar un comando
142 TLX DS 57 PL7 40S 09.2000
Depuración
Conflictos con el programa
Puede haber conflictos entre el programa PL7, que efectúa comandos o escribe va-riables, y los comandos ejecutados desde la pantalla de depuración. En todos los casos, se activará el último comando que se ha tenido en cuenta.
Animación Se puede detener la animación en las zonas de visualización:l El comando Servicios → Detener la animación para la animación en las zonas
de visualización e inhibe los botones de comando. Para esta función, también se puede utilizar el icono
l El comando Servicios → Animar reactiva la animación. También se puede uti-lizar el icono
TLX DS 57 PL7 40S 09.2000 143

Depuración
Descripción de las pantallas de depuración
Presentación La pantallas de depuración tienen un encabezado común, constituido por zonas de módulo y de vía.
Zona de módulo Esta tabla describe la zona de módulo:
TSX CFY 21 [RACK 0 POSITION 6]Depuración
Designación: MOD.PAL.PASO A PASO 2 VÍAS Versión: 1.0
Símbolo:Elección del eje:Función:
PosicionamientoVía 0
Cancelación global de forzado
CH0 DIAG...Auto
Off
ERRRUN ES DIAG...
DirDrive
Manual
Indicador Estado Significado
RUN Encendido Módulo en funcionamiento.
ERR EncendidoParpadeante
Módulo fuera de servicioFallo de comunicación con el procesador
I/O Encendido Fallo de proceso (bit AX_FLT %Ixy.i.2)
DIAG Encendido Módulo en fallo. Al pulsar el botón asociado a este indica-dor aparece un cuadro de diagnóstico de módulo para precisar el origen del fallo (Véase Diagnóstico y manten-imiento, p. 161).
144 TLX DS 57 PL7 40S 09.2000
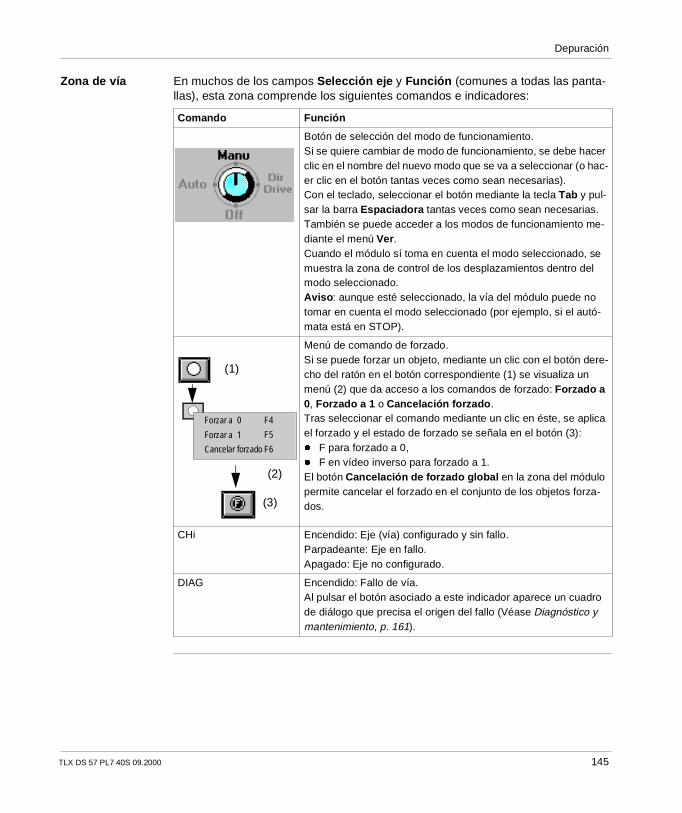
Depuración
Zona de vía En muchos de los campos Selección eje y Función (comunes a todas las panta-llas), esta zona comprende los siguientes comandos e indicadores:
Comando Función
Botón de selección del modo de funcionamiento.Si se quiere cambiar de modo de funcionamiento, se debe hacer clic en el nombre del nuevo modo que se va a seleccionar (o hac-er clic en el botón tantas veces como sean necesarias).Con el teclado, seleccionar el botón mediante la tecla Tab y pul-sar la barra Espaciadora tantas veces como sean necesarias.También se puede acceder a los modos de funcionamiento me-diante el menú Ver.Cuando el módulo sí toma en cuenta el modo seleccionado, se muestra la zona de control de los desplazamientos dentro del modo seleccionado.Aviso: aunque esté seleccionado, la vía del módulo puede no tomar en cuenta el modo seleccionado (por ejemplo, si el autó-mata está en STOP).
Menú de comando de forzado.Si se puede forzar un objeto, mediante un clic con el botón dere-cho del ratón en el botón correspondiente (1) se visualiza un menú (2) que da acceso a los comandos de forzado: Forzado a 0, Forzado a 1 o Cancelación forzado .Tras seleccionar el comando mediante un clic en éste, se aplica el forzado y el estado de forzado se señala en el botón (3):l F para forzado a 0,l F en vídeo inverso para forzado a 1.El botón Cancelación de forzado global en la zona del módulo permite cancelar el forzado en el conjunto de los objetos forza-dos.
CHi Encendido: Eje (vía) configurado y sin fallo.Parpadeante: Eje en fallo.Apagado: Eje no configurado.
DIAG Encendido: Fallo de vía.Al pulsar el botón asociado a este indicador aparece un cuadro de diálogo que precisa el origen del fallo (Véase Diagnóstico y mantenimiento, p. 161).
(1)
(2)
(3)
Forzar a 0 F4
Forzar a 1
Cancelar forzado
F5
F6
TLX DS 57 PL7 40S 09.2000 145

Depuración
Detalle de las informaciones de la pantalla de depuración
Presentación La pantalla de depuración varía según la posición del conmutador. Dispone de cua-tro elecciones:l Modo parada (Off), p. 151l Modo Directo (Dir Drive), p. 152l Modo manual (Manu), p. 153l Modo automático (Auto), p. 154El detalle de los campos y botones que aparecen en estas cuatro pantallas se des-cribe a continuación.
Descripción del campo Movimiento / Velocidad
Esta tabla describe las zonas de visualización del campo Movimiento / Velocidad:
Zona de visual-ización
Descripción
X Actual Muestra la posición de la parte móvil en número de impulsiones
X Destino Muestra la consigna de posición de la parte móvil (posición a alcanzar)
X Resto Muestra el número de impulsiones restantes por recorrer
F Actual Muestra la velocidad de la parte móvil en número de impulsiones
F Destino Muestra la consigna de velocidad de la parte móvil: velocidad a alca-nzar (velocidad manual modulada por el coeficiente CMV)
N G G9 En modo automático, muestra la instrucción en ejecución:l N corresponde al número de pasol G9 por el tipo de desplazamientol G corresponde al código de instrucción
Posición Este gráfico de barras muestra la evolución de la parte móvil entre los límites definidos en la pantalla de configuración. El color del gráfico de barras es verde y pasa a rojo cuando se sobrepasan los límites
Velocidad Este gráfico de barras muestra la relación en % entre la velocidad de la parte móvil y la velocidad máxima. El color del gráfico de barras es ver-de y pasa a rojo cuando se sobrepasa el valor de VMAX
146 TLX DS 57 PL7 40S 09.2000

Depuración
La tabla describe los indicadores del campo Movimiento / Velocidad:
Descripción del campo Eje
La tabla muestra las zonas de visualización y comando del campo Eje:
Indicador Estado Significado
Sent. +Sentido-
/ Indica un desplazamiento de la parte móvil en sentido pos-itivoIndica un desplazamiento de la parte móvil en sentido negativo
Punto AT Encendido Indica que el movimiento actual ha finalizado y que la parte móvil alcanzó el punto de destino
NEXT Encendido Indica que el módulo está listo para recibir un comando de movimiento
DONE Encendido Indica que el movimiento actual ha finalizado
Pausa inmediata Encendido Indica que la función de pausa inmediata está activada (coeficiente CMV con valor 1). En ese momento, la posición de destino contiene la posición de parada de la pausa inmediata.
Indicador / Botón Estado Significado
Aceptar Encendido Eje en estado de funcionamiento (no hay fallo con blo-queo)
Referenciado Encendido Eje referenciado
Detenido Encendido Parte móvil en la parada
Validación / Este botón permite controlar el relé de validación del variador
TLX DS 57 PL7 40S 09.2000 147

Depuración
Descripción del campo E/S
La tabla describe las zonas de visualización del campo E/S:
1 = indicador encendido, 0 = indicador apagado
Descripción de los comandos
La tabla muestra la zona de comando:
Indicador Significado
Parada externa Estado de la señal (0 ó 1) sobre la entrada Parada externa. El indica-dor está encendido cuando la parada externa está activa, con presen-cia de 24 V sobre la entrada.
Fin recorrido +/- Actividad de la función fin recorrido +/-. El indicador se enciende cuan-do la parte móvil se encuentra en el tope de fin de recorrido, con ausen-cia de 24 V sobre la entrada.
Leva PO Estado de la señal (0 ó 1) sobre la entrada Punto de origen. El indica-dor se enciende cuando la parte móvil se encuentra sobre la leva, con presencia de 24 V.
Leva EVT Estado de la señal (0 ó 1) sobre la entrada Suceso. El indicador se en-ciende cuando la parte móvil se encuentra sobre la leva de suceso, con presencia de 24 V.
Ctrl. traductor El indicador está encendido cuando el traductor no da la señal Listo. El indicador está apagado cuando el traductor da la señal Listo (OK). Los niveles dependen de los ajustes de configuración.
Pérdida de paso Estado de la señal (0 ó 1) sobre la entrada Control de pérdida de paso , señal producida por el traductor. El indicador está encendido cuando la entrada tiene el estado 1 (cable desconectado), en otro caso está apagado.
Reactivar paso El botón controla la reactivación del sistema de detección de la pérdida de paso del traductor.
Cmdo rechazado Descripción
STOP Provoca la parada de la parte móvil según la deceleración definida en la configuración
Param Permite introducir el valor de un desplazamiento incremental (comando INC+ ó INC-) o del punto de origen forzado
CMV Permite introducir un valor entre 0 y 2000 que determina el coeficiente multiplicador de velocidad (0,000 a 2,000 por intervalos de 1/1000)
148 TLX DS 57 PL7 40S 09.2000
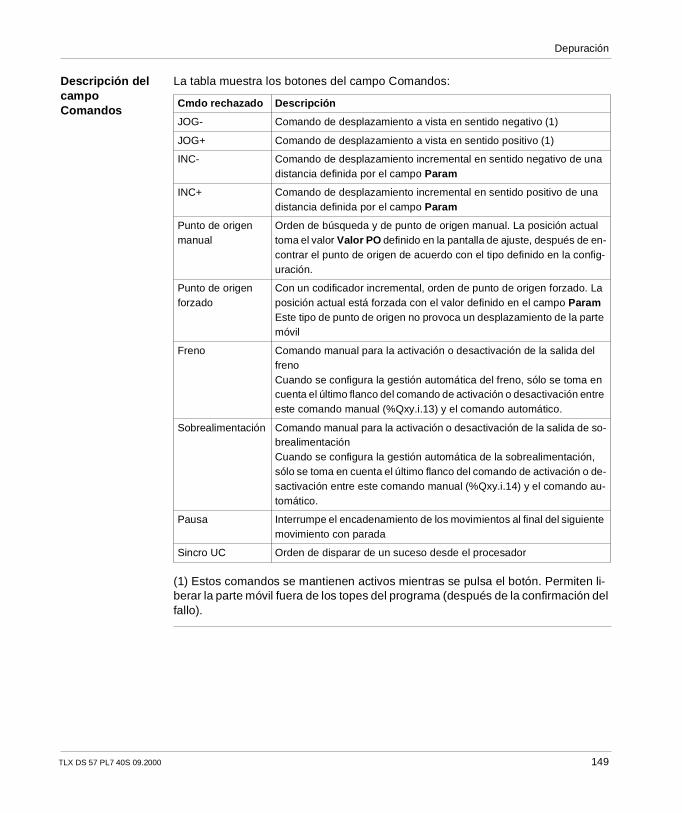
Depuración
Descripción del campo Comandos
La tabla muestra los botones del campo Comandos:
(1) Estos comandos se mantienen activos mientras se pulsa el botón. Permiten li-berar la parte móvil fuera de los topes del programa (después de la confirmación del fallo).
Cmdo rechazado Descripción
JOG- Comando de desplazamiento a vista en sentido negativo (1)
JOG+ Comando de desplazamiento a vista en sentido positivo (1)
INC- Comando de desplazamiento incremental en sentido negativo de una distancia definida por el campo Param
INC+ Comando de desplazamiento incremental en sentido positivo de una distancia definida por el campo Param
Punto de origen manual
Orden de búsqueda y de punto de origen manual. La posición actual toma el valor Valor PO definido en la pantalla de ajuste, después de en-contrar el punto de origen de acuerdo con el tipo definido en la config-uración.
Punto de origen forzado
Con un codificador incremental, orden de punto de origen forzado. La posición actual está forzada con el valor definido en el campo ParamEste tipo de punto de origen no provoca un desplazamiento de la parte móvil
Freno Comando manual para la activación o desactivación de la salida del frenoCuando se configura la gestión automática del freno, sólo se toma en cuenta el último flanco del comando de activación o desactivación entre este comando manual (%Qxy.i.13) y el comando automático.
Sobrealimentación Comando manual para la activación o desactivación de la salida de so-brealimentaciónCuando se configura la gestión automática de la sobrealimentación, sólo se toma en cuenta el último flanco del comando de activación o de-sactivación entre este comando manual (%Qxy.i.14) y el comando au-tomático.
Pausa Interrumpe el encadenamiento de los movimientos al final del siguiente movimiento con parada
Sincro UC Orden de disparar de un suceso desde el procesador
TLX DS 57 PL7 40S 09.2000 149

Depuración
Descripción del campo Fallos
La tabla describe las zonas de visualización y comando del campo Fallos:
Indicador / Botón Estado Significado
Cmdo rech. Encendido Rechazo del último comando
Equipo Encendido Fallo externo del equipo (codificador, variador, salidas, ...)
Eje Encendido Fallo de la aplicación (seguimiento, topes del progra-ma, ....)
Confirm. / Botón de confirmación de los fallos. El uso de este botón permite confirmar todos los fallos que ya han de-saparecido
150 TLX DS 57 PL7 40S 09.2000

Depuración
Modo parada (Off)
Presentación En este modo, la vía de comando de eje sólo transmite los datos de posición y de velocidad. La vía no controla el desplazamiento del módulo. La salida de la valida-ción del traductor se mantiene bajo control del comando ENABLE (%Qxy.i.10).
Para obtener más detalles sobre los campos y botones de esta pantalla, véase De-talle de las informaciones de la pantalla de depuración, p. 146.
0
0
X
F
Movimiento: Impulsos Velocidad: HercioActual
ReferenciadoDetenido
EjeAceptar
CONNECTE U:SYSRUN
PL7 Junior: AXIS - [TSX CFY 21 [RACK 0 POSITION 3]]
RUNRUN
Archivo Edición Servicios Aplicación Autómata Depuración Opciones VentanaVista ?
Depuración Designación: MOD.PAL.PASO A PASO 2 VÍAS Versión: 1.0
Símbolo:Elección del eje:Función:
PosicionamientoVía 0 CH0 DIAG...Auto
Off
ERRRUN ES DIAG...
DirDrive
Manual
STOP
Eje
Fallos
Conf.
Equipo
TLX DS 57 PL7 40S 09.2000 151
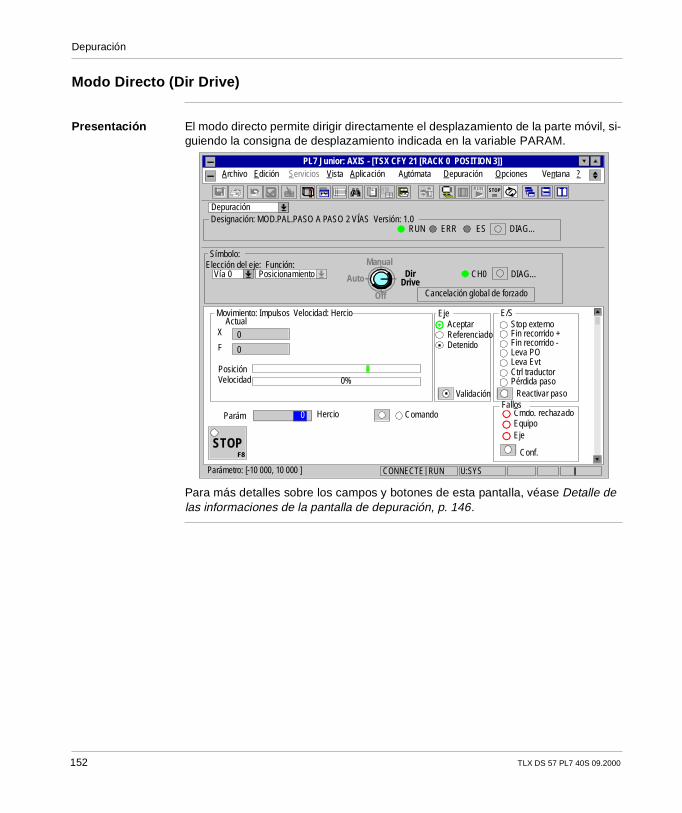
Depuración
Modo Directo (Dir Drive)
Presentación El modo directo permite dirigir directamente el desplazamiento de la parte móvil, si-guiendo la consigna de desplazamiento indicada en la variable PARAM.
Para más detalles sobre los campos y botones de esta pantalla, véase Detalle de las informaciones de la pantalla de depuración, p. 146.
0
0
Stop externoFin recorrido +Fin recorrido -Leva PO
X
F
Validación
Movimiento: Impulsos Velocidad: Hercio E/SActual
F8
ReferenciadoDetenido
EjeAceptar
PosiciónVelocidad 0%
STOP
CONNECTE U:SYSRUNParámetro: [-10 000, 10 000 ]
PL7 Junior: AXIS - [TSX CFY 21 [RACK 0 POSITION 3]]
RUNRUN
Archivo Edición Servicios Aplicación Autómata Depuración Opciones VentanaVista ?
Depuración Designación: MOD.PAL.PASO A PASO 2 VÍAS Versión: 1.0
Símbolo:Elección del eje: Función:
PosicionamientoVía 0
Cancelación global de forzado
CH0 DIAG...Auto
Off
ERRRUN ES DIAG...
DirDrive
Manual
STOP
Cmdo. rechazadoEquipoEje
Fallos
Conf.
Comando
Leva EvtCtrl traductorPérdida paso
Reactivar paso
0 HercioParám
152 TLX DS 57 PL7 40S 09.2000

Depuración
Modo manual (Manu)
Presentación El modo manual permite dirigir directamente el desplazamiento de la parte móvil desde la pantalla de depuración. Para ello, se deben utilizar los comandos JOG+, JOG-, INC+,...
Para más detalles sobre los campos y botones de esta pantalla, véase Detalle de las informaciones de la pantalla de depuración, p. 146.
0
0
0
0
0
DONE
Stop externoFin recorrido +Fin recorrido -Leva PO
Sentido -X
F
Validación
Destino Resto Movimiento: Impulsos Velocidad: Hercio E/S
Actual
F8
ReferenciadoDetenido
EjeAceptar
AT Punto
PosiciónVelocidad 0%
STOP
CONNECTE U:SYSRUNParámetro: [-16 777 216, 16 777 215]
PL7 Junior: AXIS - [TSX CFY 21 [RACK 0 POSITION 3]]
RUNRUN
Archivo Edición Servicios Aplicación Autómata Depuración Opciones VentanaVista ?
Depuración Designación: MOD.PAL.PASO A PASO 2 VÍAS Versión: 1.0
Símbolo:Elección del eje:Función:
PosicionamientoVía 0
Cancelación global de forzado
CH0 DIAG...Auto
Off
ERRRUN ES DIAG...
DirDrive
Manual
STOP
Cmdo. rechazado
Equipo
Eje
Fallos
INC-
Punto de origen manual
Punto de origen forzado
Conf.
Comandos
Freno
INC+
JOG- JOG+
Sobrealimentación
Leva EvtCtrl traductorPérdida paso
Reactivar paso
1 000 /1000CMV0Parám impulsos
1 000 /1000CMV0Parám impulsos
TLX DS 57 PL7 40S 09.2000 153
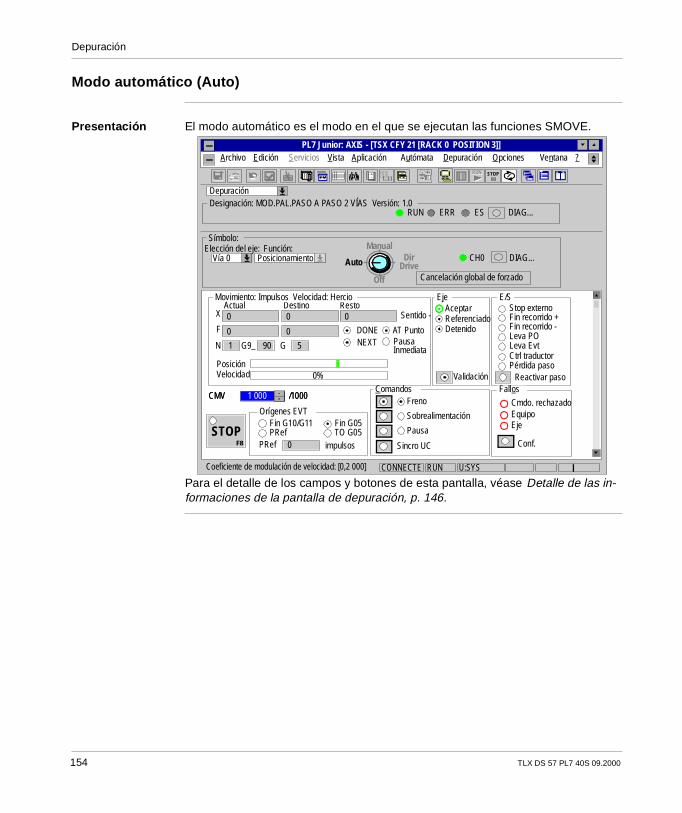
Depuración
Modo automático (Auto)
Presentación El modo automático es el modo en el que se ejecutan las funciones SMOVE.
Para el detalle de los campos y botones de esta pantalla, véase Detalle de las in-formaciones de la pantalla de depuración, p. 146.
0
0
0
0
0
DONE
Stop externoFin recorrido +Fin recorrido -Leva PO
Sentido -X
F
Validación
Destino Resto Movimiento: Impulsos Velocidad: Hercio E/S
Actual
F8
ReferenciadoDetenido
EjeAceptar
AT Punto
PosiciónVelocidad 0%
STOP
CONNECTE U:SYSRUNCoeficiente de modulación de velocidad: [0,2 000]
PL7 Junior: AXIS - [TSX CFY 21 [RACK 0 POSITION 3]]
RUNRUN
Archivo Edición Servicios Aplicación Autómata Depuración Opciones VentanaVista ?
Depuración Designación: MOD.PAL.PASO A PASO 2 VÍAS Versión: 1.0
Símbolo:Elección del eje: Función:
PosicionamientoVía 0
Cancelación global de forzado
CH0 DIAG...Auto
Off
ERRRUN ES DIAG...
DirDrive
Manual
STOP
Cmdo. rechazadoEquipoEje
Fallos
Pausa
Sincro UC Conf.
ComandosFreno
Sobrealimentación
Leva EvtCtrl traductorPérdida paso
Reactivar paso
/1000CMV 1 000 /1000CMV
impulsos
NEXT Pausa Inmediata
0PRef
Orígenes EVTFin G10/G11PRef
Fin G05TO G05
N G9_ G 5901
154 TLX DS 57 PL7 40S 09.2000
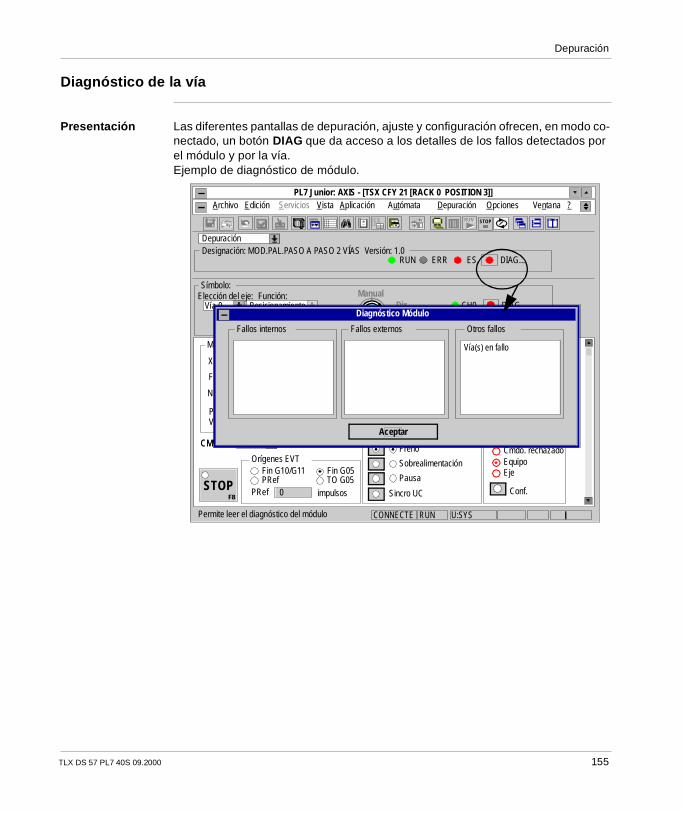
Depuración
Diagnóstico de la vía
Presentación Las diferentes pantallas de depuración, ajuste y configuración ofrecen, en modo co-nectado, un botón DIAG que da acceso a los detalles de los fallos detectados por el módulo y por la vía.Ejemplo de diagnóstico de módulo.
0
0
0
0
0
DONE
Stop externoFin recorrido +Fin recorrido -Leva PO
Sentido -X
F
Validació
Destino Resto Movimiento: Impulsos Velocidad: Hercio E/S
Actual
F8
ReferenciDetenido
EjeAceptar
AT Punto
PosiciónVelocidad 0%
STOP
CONNECTE U:SYSRUNPermite leer el diagnóstico del módulo
PL7 Junior: AXIS - [TSX CFY 21 [RACK 0 POSITION 3]]
RUNRUN
Archivo Edición Servicios Aplicación Autómata Depuración Opciones VentanaVista ?
Depuración Designación: MOD.PAL.PASO A PASO 2 VÍAS Versión: 1.0
Símbolo:Elección del eje: Función:
PosicionamientoVía 0
Cancelación global
CH0 DIAG...Auto
Off
ERRRUN ES DIAG...
DirDrive
Manual
STOP
Cmdo. rechazadoEquipoEje
Fallos
Pausa
Sincro UC Conf.
ComandosFreno
Sobrealimentación
Leva EvtCtrl traductorPérdida paso
Reactivar paso
1 000 /1000CMV /1000CMV
impulsos
NEXT Pausa Inmediata
0PRef
Orígenes EVTFin G10/G11PRef
Fin G05TO G05
N G9_ G 5901
Aceptar
Fallos internos Fallos externos Otros fallos
Diagnóstico Módulo
Vía(s) en fallo
TLX DS 57 PL7 40S 09.2000 155

Depuración
Ejemplo de diagnóstico de vía.
Descripción de los diferentes campos
La pantalla de Diagnóstico de vía propone los siguientes campos:
F8
STOP
CONNECTE U:SYSRUN
+PL7 Junior: AXIS - [TSX CFY 21 [RACK 0 POSITION 3]]
RUNRUN
Archivo Edición Servicios Aplicación Autómata Depuración Opciones VentanaVista ?
Depuración Designación: MOD.PAL.PASO A PASO 2 VÍAS Versión: 1.0
Símbolo:Elección del eje: Función:
PosicionamientoVía 0
Cancelación global de forzado
CH0 DIAG...Auto
Off
ERRRUN ES DIAG...
DirDrive
Manual
STOP
Configuración:
Aceptar
Comandos rechazados
Fallos internos Fallos externos Otros fallos
Ajuste
Comando:
Diagnóstico Vía
Error de comando manual IncM condición de parada16#9a
Fallo de traductor
Campo Descripción
Fallos internos Fallos internos en el módulo que requieren, generalmente, el reemplazo del módulo
Fallos externos Fallos procedentes de la parte operativa (Véase Descripción de los fallos de equipo externos, p. 108)
Otros fallos Fallos de la aplicación (Véase Descripción de los fallos de la aplicación, p. 110)
Comandos rechazados Indica la causa y el número de mensaje de un comando rec-hazado (Véase Descripción de los fallos de comando rechaza-do, p. 111)
156 TLX DS 57 PL7 40S 09.2000

Depuración
Archivado, documentación y simulación
Archivado Cuando se ha depurado el programa en modo conectado, se deben efectuar los si-guientes guardados:l Guardado de los parámetros de ajuste, si éstos se han modificado. Para ello, se
debe seleccionar la pantalla de ajuste y utilizar el comando Servicios → Guar-dar los parámetros ,
l Guardado de la aplicación en el disco mediante el comando Archivo → Guar-dar.
Documentación La documentación de la aplicación del comando de ejes está incluida en la docu-mentación completa de la aplicación PL7. Esta documentación permite reagrupar en una carpeta:l El programa,l Los parámetros de Configuración y los parámetros de Ajuste guardados.
Simulación Para hacer funcionar las vías del módulo TSX CFY, basta con tener el bloque de terminales Telefast de simulación TON, referencia ABE-6TES160, alimentado por los 24 voltios disponibles en la alimentación del rack y vincularlo directamente al co-nector HE10 de entradas/salidas auxiliares del TSX CFY mediante un cable plano.Para la vía 0, se debe aplicar un nivel 1 en las entradas 2, 4 y 5 (parada de urgencia y fin de recorrido).Para la vía 1 (sólo TSX CFY 21), entradas 8, 10 y 11. Dejar el nivel 0 en todas las demás.En la configuración de la vía de comando de ejes, se debe seleccionar la casilla in-versión del traductor... entrada de control . Esto permite el funcionamiento ante la ausencia de cualquier conexión en el SUB D traductor.Validar
TLX DS 57 PL7 40S 09.2000 157

Depuración
Cómo efectuar una simulación con un TSX CFY
Para hacer funcionar las vías del módulo TSX CFY, basta con tener el bloque de terminales Telefast de simulación TON, referencia ABE-6TES160, alimentado por los 24 voltios disponibles en la alimentación del rack y vincularlo directamente al co-nector HE10 de entradas/salidas auxiliares del TSX CFY mediante un cable plano.
Etapa Acción
1 Para la vía 0, se debe aplicar un nivel 1 en las entradas 2, 4 y 5 (parada de urgencia y fin de recorrido).
2 Para la vía 1 (sólo TSX CFY 21), se debe aplicar un nivel 1 en las entradas 8, 10 y 11. Dejar el nivel 0 en todas las demás.
3 En la configuración de la vía de comando de ejes, se debe seleccionar la casil-la inversión del traductor... entrada de control . Esto permite el funciona-miento ante la ausencia de cualquier conexión en el SUB D traductor.
4 Hay que validar la vía en la pantalla de puesta en marcha en modo manual.
5 Se debe utilizar los botones JOG+ o JOG- para simular los desplazamientos de la parte móvil.
158 TLX DS 57 PL7 40S 09.2000
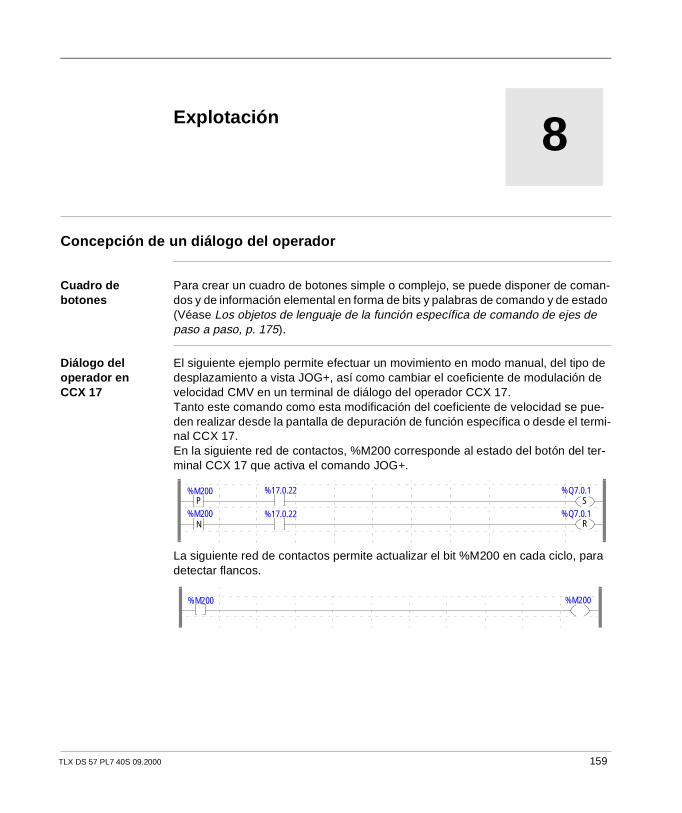
TLX DS 57 PL7 40S 09.2000
8
ExplotaciónConcepción de un diálogo del operador
Cuadro de botones
Para crear un cuadro de botones simple o complejo, se puede disponer de coman-dos y de información elemental en forma de bits y palabras de comando y de estado (Véase Los objetos de lenguaje de la función específica de comando de ejes de paso a paso, p. 175).
Diálogo del operador en CCX 17
El siguiente ejemplo permite efectuar un movimiento en modo manual, del tipo de desplazamiento a vista JOG+, así como cambiar el coeficiente de modulación de velocidad CMV en un terminal de diálogo del operador CCX 17.Tanto este comando como esta modificación del coeficiente de velocidad se pue-den realizar desde la pantalla de depuración de función específica o desde el termi-nal CCX 17.En la siguiente red de contactos, %M200 corresponde al estado del botón del ter-minal CCX 17 que activa el comando JOG+.
La siguiente red de contactos permite actualizar el bit %M200 en cada ciclo, para detectar flancos.
%M200 %Q7.0.1
%M200
%17.0.22
%17.0.22 %Q7.0.1R
SP
N
%M200 %M200
159

Explotación
En las siguiente red de contactos, %M200 contiene la consigna del coeficiente CMV, definido en el terminal CCX 17. %MW0 contiene la memorización de la última consigna CMV introducida en el terminal.
%MW0:=%MW200
OPERATE
OPERATE
COMPARE%MW0<>%MW200
160 TLX DS 57 PL7 40S 09.2000
TLX DS 57 PL7 40S 09.2000
9
Diagnóstico y mantenimientoPresentación
Objeto de este capítulo
Este capítulo describe el procedimiento que se debe seguir frente a ciertas situacio-nes de mantenimiento (síntoma, diagnóstico y conducta que se debe seguir).
Contenido Este capítulo contiene los siguiente apartados:
Apartado Página
Supervisión de los fallos y las condiciones de ejecutabilidad de los comandos 162
Ayuda al diagnóstico 163
161

Diagnóstico y mantenimiento
Supervisión de los fallos y las condiciones de ejecutabilidad de los comandos
Supervisión de los fallos
Se dispone de muchos medios para detectar un posible fallo: l los indicadores en el panel frontal del módulo,l Las pantallas de diagnóstico, a las que se accede mediante la tecla DIAG, en
modo conectado, desde todas las pantallas de función específica (Véase Diag-nóstico de la vía, p. 155) del módulo de comando de ejes,
l Las pantallas de depuración (Véase Descripción de las pantallas de depuración, p. 144),
l Los bits de fallo y las palabras de estado (Véase Los objetos de lenguaje de la función específica de comando de ejes de paso a paso, p. 175).
Comandos de movimiento
Para que los comandos de movimiento (en modo automático o manual) se puedan ejecutar, se deben cumplir las siguientes condiciones:l El eje debe estar configurado y sin fallo con bloqueo,l El comando de validación del variador ENABLE debe estar activado (bit
%Qxy.i.10 en estado 1) y el comando STOP debe estar inactivo,l Se debe seleccionar el modo automático o manual,l Para los comandos en posición absoluta, la posición está comprendida entre los
límites SL_MIN y SL_MAX,l Para los comandos en posición relativa, el destino calculado a partir de la posi-
ción actual relativa está comprendido entre los límites SL_MIN y SL_MAX,l Los ejes están referenciados, excepto para los comandos de punto de origen y
de JOG,l La velocidad F debe ser inferior o igual a FMAX,l Si la parte móvil se encuentra fuera de los topes de fin de recorrido, el sentido
del desplazamiento requerido es obligatoriamente de retorno entre los topes.
Modificación del parámetro CMV
Si una modificación del parámetro de modulación de la velocidad CMV implica una velocidad superior a FMAX, ésta se verá limitada por FMAX.
Control de encadenamiento
Si no se ha seleccionado la opción Control de encadenamiento en la configura-ción, se produce un movimiento sin parada no seguido de ningún comando de en-cadenamiento hasta los topes de programa.
162 TLX DS 57 PL7 40S 09.2000

Diagnóstico y mantenimiento
Ayuda al diagnóstico
Presentación Se pueden dar situaciones que requieran una solución por parte del usuario. El si-guiente procedimiento ayuda a diagnosticar estas situaciones e indica la conducta que se debe seguir.
Procedimiento que se ha de seguir ante situaciones
Nuevos parámetros no tomados en cuenta
Tratamiento de sucesos
Ajustes perdidos
Síntoma El módulo TSX CFY no parece haber tomado en cuenta los nuevos parámetros escritos por WRITE_PARAM
Diagnóstico Programar una instrucción READ_PARAM en la aplicación para cono-cer los valores que sí utiliza el módulo.Se ignora un WRITE_PARAM iniciado mientras otro intercambio de ajuste está en curso
Conducta que se debe seguir
Probar el bit %MWxy.i.0:X2 antes de cualquier intercambio de ajuste
Síntoma No se ha ejecutado el tratamiento de sucesos asociado a la vía de co-mando de ejes
Diagnóstico Verificar que se ha validado el conjunto de la cadena de transmisión del sucesol Número de suceso declarado en la configuración idéntico al del
tratamiento de sucesos,l Origen del suceso desenmascarada (código M del comando
SMOVE),l Sucesos autorizados en el sistema (%S38 = 1),l Sucesos no enmascarados en el sistema (UNMASKEVT())
Conducta que se debe seguir
Remítase a la utilización de sucesos
Síntoma Se han perdido los ajustes del usuario
Diagnóstico Un rearranque en frío provoca la pérdida de los ajustes actuales efec-tuados mediante la pantalla o una instrucción WRITE_PARAM
Conducta que se debe seguir
Guardar los ajustes actuales mediante el comando Servicio → Guard-ar los parámetros o mediante la instrucción SAVE_PARAM
TLX DS 57 PL7 40S 09.2000 163

Diagnóstico y mantenimiento
Palabras de estado no coherentes
Comandos sin efecto
Comandos no modificables
Imposible introducir caracteres
Síntoma Las palabras de estado %MWxy.i.1 y %MWxy.i.2 no son coherentes con el estado de la vía de comando de eje
Diagnóstico Estas palabras sólo se actualizan por petición explícita READ_STS
Conducta que se debe seguir
Programar una instrucción READ_STS en la aplicación
Síntoma Los comandos de la pantalla de depuración están sin efecto
Diagnóstico La aplicación o la tarea está en STOP
Conducta que se debe seguir
Poner la aplicación o la tarea está en RUN
Síntoma Algunos comandos de la pantalla de depuración no se pueden modificar
Diagnóstico La aplicación escribe estos bits
Conducta que se debe seguir
Se debe utilizar el forzado de los bits (para los objetos de tipo %Qxy.i.r) o reconstruir la aplicación para no escribir sistemáticamente estos bits (modificación en transición, no en estado)
Síntoma No es posible introducir más de tres caracteres en los campos numéri-cos de las pantallas de ajuste y de configuración
Diagnóstico En el panel de configuración de Windows, no se ha elegido separador de millares
Conducta que se debe seguir
En el panel de configuración de Windows, seleccionar el icono Interna-cional en el campo Formato de nombres. Activar el comando Modificar y elegir un separador de millares
164 TLX DS 57 PL7 40S 09.2000

Diagnóstico y mantenimiento
Comando rechazado
Mala toma en cuenta de los comandos en modo AUTO
Síntoma En modo DIRDRIVE, después de parada tras rebasamiento de los topes de programa, los comandos se rechazan.
Diagnóstico El modo DIRDRIVE se activa tras una utilización en modo MANU o AUTO en la que se ha efectuado un punto de origen. El eje está refer-enciado. El control de los topes de programa está activo.El rebasamiento de uno de estos topes provoca una parada con fallo.Ya no se acepta ningún movimiento en modo DIRDRIVE.
Conducta que se debe seguir
Se pueden realizar dos tipos de acciones para rearrancar los movimien-tos:l Es posible provocar la pérdida de referencia del eje, tras la parada
completa de la parte móvil:l desactivar la vía, %Qxy.i.10 a 0 (ENABLE)l reactivar la vía, %Qxy.i.10 a 1 (ENABLE)l confirmar el fallo (flanco ascendente en el comando ACK_DEF,
%Qxy.i.9l Forzar la posición de la parte móvil entre los topes de programa:
l pasar momentáneamente a modo MANUl confirmar el fallo (ACK_DEF)l efectuar un punto de origen forzado en una posición situada entre
los topes de programal volver al modo DIRDRIVE.
Síntoma En modo AUTO, después de un rebasamiento de los topes de progra-ma de fin de recorrido, los comandos de movimiento no se efectúan cor-rectamente.
Diagnóstico Tras el rebasamiento de un tope de fin de recorrido, lo únicos comandos aceptados son los comandos de movimiento que van en sentido de re-torno entre los topes de fin de recorrido.
Conducta que se debe seguir
Verificar que el movimiento solicitado e incorrectamente realizado tiende a hacer volver la parte móvil entre los topes de fin de recorrido.
TLX DS 57 PL7 40S 09.2000 165

Diagnóstico y mantenimiento
166 TLX DS 57 PL7 40S 09.2000

TLX DS 57 PL7 40S 09.2000
10
Funciones complementariasAprendizaje de cotas
Presentación El siguiente ejemplo de programa PL7 permite el aprendizaje y la utilización de 16 cotas.
Aprendizaje de cotas
Este gráfico permite programar el aprendizaje de 16 cotas.
ETAPA 50 ACCIÓN AL ACTIVAR<almacena %MW99 para utilizarlo como límite! %MW98 := %MW99;<Inicializa el índice durante la fase de aprendizaje! %MW99 := -1;TRANSICIÓN: X50 -> X51! RE %I2.0ETAPA 51 ACCIÓN AL ACTIVAR<actualiza el índice! %MW99 := %MW99+1;
50
51
5352
167

Funciones complementarias
<aprendizaje de posiciones! %MD200[%MW99] := %ID7.0;TRANSICIÓN: X51 -> X52! %MW99 <= 16TRANSICIÓN: X51 -> X53! %MW99 > 16TRANSICIÓN: X53 -> X50! RE %I2.1TRANSICIÓN: X52 -> X51! RE %I2.0TRANSICIÓN: X52 -> X50! RE %I2.1
168 TLX DS 57 PL7 40S 09.2000

Funciones complementarias
Utilización de cotas
Este gráfico permite programar la utilización de cotas
ETAPA 42 ACCIÓN AL ACTIVAR<inicializa %MW97 como índice de ejecución! %MW97 := -1;TRANSICIÓN: X42 -> X43! RE %I2.2ETAPA 43 ACCIÓN AL ACTIVAR<incrementa el índice de ejecución! %MW97 := %MW97+1;<ejecuta el siguiente segmento! SMOVE %CH7.0 (%MW97,%KW8,%KW1,%MD200[%MW97],150000,0);%KW8: 90 desplazamiento en valor absoluto%KW1: 09 ir al punto sin paradaTRANSICIÓN: X43 -> X46! %I7.0.0 AND (%MW97 < %MW98) AND NOT %I7.0.2TRANSICIÓN: X43 -> X42! (%I7.0.1 AND (%MW97 >= %MW98)) OR %I7.0.2TRANSICIÓN: X46 -> X43! TRUE
42
43
46
TLX DS 57 PL7 40S 09.2000 169

Funciones complementarias
170 TLX DS 57 PL7 40S 09.2000

TLX DS 57 PL7 40S 09.2000
11
Características y rendimientoRendimiento y limitaciones
Presentación Esta parte describe el rendimiento y las características de las funciones de coman-do paso a paso: l el tamaño de la memoria que emplea una función SMOVE,l los tiempos de ejecución de las funciones de comando paso a paso,l el tiempo de ciclo de aclopador,l las características de los desplazamientos de baja amplitud,
Tamaño de una función SMOVE
Este cuadro indica las zonas de memoria que utiliza una instrucción SMOVE así como el tamaño correspondiente, en número de palabras de 16 bits.
Tiempo de ejecución
La tabla detalla los tiempos de ejecución de las funciones asociadas al comando de ejes paso a paso.
Memoria bits Zona de datos Zona de programa
TSX CFY 11 29 390 170
TSX CFY 21 58 780 220
Sobrecoste de la pri-mera vía configurada
0 0 2290
Descripción de la función Tiempo de ejecución
Adquisición de las entradas/salidas del módulo TSX CFY 95 microsegundos
Función SMOVE 840 microsegundos
READ_STATUS 540 microsegundos
READ_PARAM 460 microsegundos
WRITE_PARAM 760 microsegundos
SAVE_PARAM 500 microsegundos
171

Características y rendimiento
Características del desplazamiento de baja amplitud
Un desplazamiento de baja amplitud corresponde a un desplazamiento que no per-mite alcanzar la velocidad especificada en la instrucción. La ley de velocidad tiene apariencia triangular en lugar de trapezoidal.Ejemplo de instrucción SMOVE %CH7.1(1, 90, 09, X1, V ,0), l X1 es la posición a alcanzar,l V la velocidad de crucero a la que debe realizarse el desplazamiento.l llamemos X0, la posición de salida de la parte móvil.
RESTORE_PARAM 780 microsegundos
Ajuste que se toma en cuenta (después de una instruc-ción WRITE_PARAM)
60 ms para el módulo TSX CFY 11210 ms para el módulo TSX CFY 21
Reconfiguración de una vía que se toma en cuenta 1,5 s
Nota: le tiempo de ciclo del aclopador es de 10 ms
Descripción de la función Tiempo de ejecución
172 TLX DS 57 PL7 40S 09.2000

Características y rendimiento
La tabla muestra las dos situaciones posibles.
Si la distancia por recorrer de X0 a X1...
Entonces...
es suficiente para alcanzar la velocidad especificada V
el desplazamiento se realiza siguiendo una trayectoria trape-zoidal. La trayectoria evidencia duraciones de aceleración y deceleración iguales a t_ACC.
no es suficiente para alca-nzar la velocidad especifica-da V
el desplazamiento se realiza siguiendo una trayectoria en triángulo, la duración de las fases de aceleración y decel-eración se reduce proporcionalmente a la velocidad.
t_ACCt_ACCt
V
SS_FREQ
t
V
Vp
Vr
Vp: velocidad programadaVr : velocidad real
TLX DS 57 PL7 40S 09.2000 173

Características y rendimiento
174 TLX DS 57 PL7 40S 09.2000
TLX DS 57 PL7 40S 09.2000
12
Los objetos de lenguaje de la función específica de comando de ejes de paso a pasoPresentación
Objeto de este capítulo
Este capítulo describe los objetos de lenguaje asociados a la función específica de comando de ejes de paso a paso, así como las diferentes maneras de emplearlos.
Contenido Este capítulo contiene los siguiente apartados:
Apartado Página
Presentación de los objetos lenguaje de la función específica comando de eje de paso a paso
176
Intercambios entre el procesador y el módulo de comando de ejes 177
Presentación de los intercambios implícitos 179
Presentación de los intercambios explícitos 180
Gestión del intercambio y confirmación de los objetos explícitos 182
Datos generales del módulo 185
Datos internos de comando (intercambios implícitos) 186
Datos internos de estado (intercambios implícitos) 188
Datos internos de estado (intercambios explícitos) 190
Parámetros de ajuste (intercambios explícitos) 192
Lista de los códigos de error CMD_FLT 193
175
Objetos de lenguaje
Presentación de los objetos lenguaje de la función específica comando de eje de paso a paso
Generalidades Los módulos de comando de eje configurados en una posición determinada gene-ran automáticamente un conjunto de objetos de lenguaje que permiten programar-los y leer los resultados de medidas y los diagnósticos.Existen dos grandes tipos de objetos lenguaje:l los objetos de intercambios implícitos, que son intercambiados automáticamente
en cada ciclo completo de la tarea asociada con el módulo,l los objetos de intercambios explícitos, que son intercambiados a petición del pro-
grama, mediante el uso de las instrucciones de intercambio explícito.Los primeros (de intercambio implícito) están relacionados con las imágenes de las entradas/salidas del módulo: resultados de posicionamiento, informaciones y co-mandos de programa necesarios para la explotación. Los segundos (de intercambio explícito) permiten parametrizar el módulo y propor-cionan los argumentos adicionales (parámetros, comandos y datos) necesarios en una programación avanzada. No son indispensables para tareas normales de pro-gramación.
176 TLX DS 57 PL7 40S 09.2000
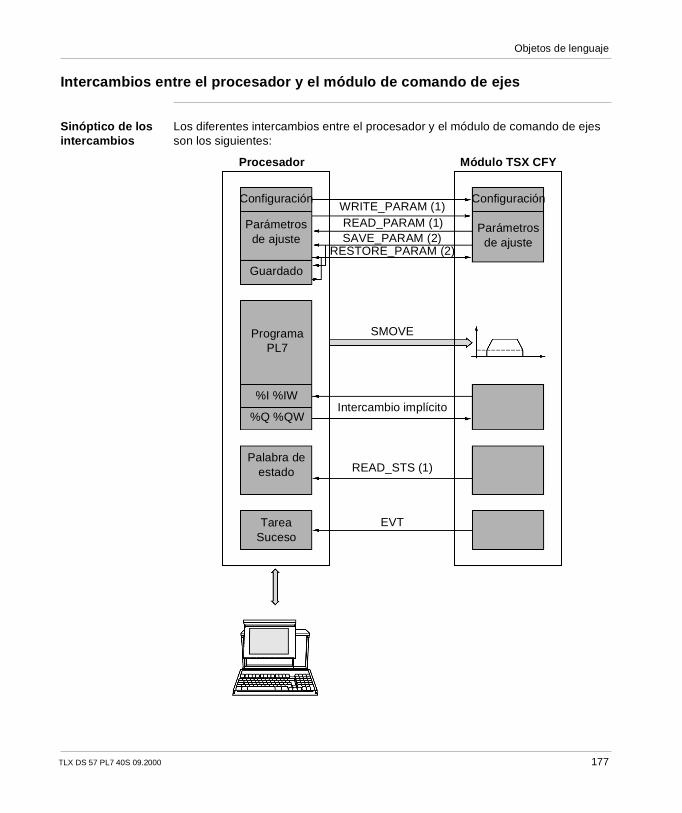
Objetos de lenguaje
Intercambios entre el procesador y el módulo de comando de ejes
Sinóptico de los intercambios
Los diferentes intercambios entre el procesador y el módulo de comando de ejes son los siguientes:
Configuración
Parámetrosde ajuste
Guardado
Configuración
Parámetrosde ajuste
ProgramaPL7
%I %IW
%Q %QW
Palabra de estado
Procesador Módulo TSX CFY
WRITE_PARAM (1)READ_PARAM (1)SAVE_PARAM (2)
RESTORE_PARAM (2)
SMOVE
Intercambio implícito
READ_STS (1)
EVTTareaSuceso
TLX DS 57 PL7 40S 09.2000 177

Objetos de lenguaje
(1) Lectura o escritura a partir de la pantalla de ajuste o la aplicación, mediante uti-lización de las instrucciones de intercambios explícitos.(2) Guardar o restituir mediante los comandos Guardar los parámetros o Restau-rar los parámetros del menú Servicios de PL7 o las instrucciones SAVE_PARAM o RESTORE_PARAM.
178 TLX DS 57 PL7 40S 09.2000

Objetos de lenguaje
Presentación de los intercambios implícitos
Presentación Estos objetos dan acceso a las entradas e informaciones del programa de la función específica correspondiente. El sistema de direccionamiento de las palabras y los bits se ilustra en la parte Fun-ciones especificas comunes.
Intentos Las imágenes (%I et %IW) de las entradas del módulo se actualizan en el procesa-dor al principio del ciclo de tarea, en estado RUN o STOP.Los comandos de las salidas (%Q y %QW) se actualizan en el módulo al final del ciclo de tarea, sólo cuando ésta tiene el estado RUN.xy corresponde a la posición del módulo, i corresponde al número de vía (contando desde 0) en el módulo.
Ilustración El gráfico a continuación ilustra el ciclo de funcionamiento correspondiente a una tarea del autómata (ejecución cíclica).
Tratamiento interno
Adquisición de las entradas
Tratamiento del programa
Actualización de las salidas
RUN STOP
TLX DS 57 PL7 40S 09.2000 179
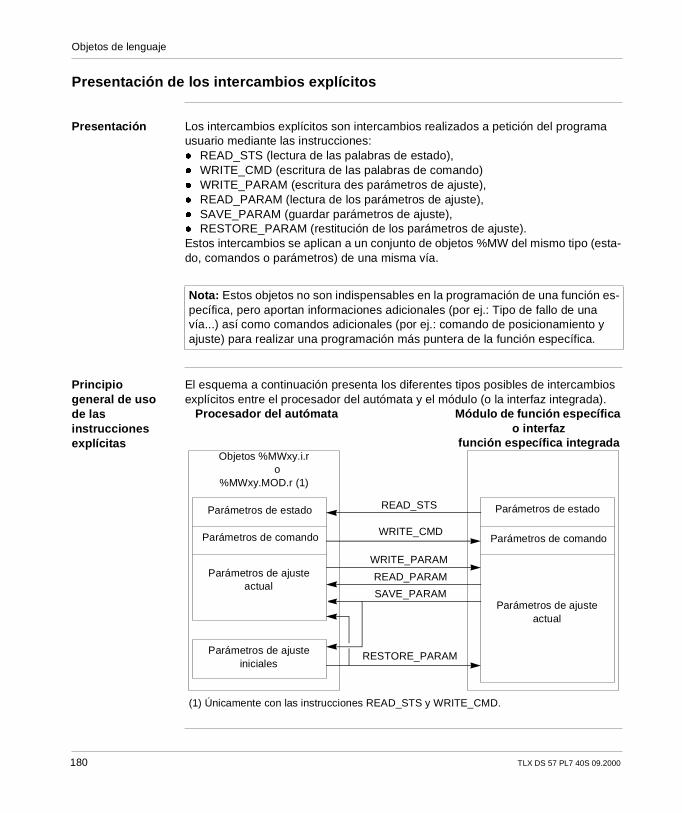
Objetos de lenguaje
Presentación de los intercambios explícitos
Presentación Los intercambios explícitos son intercambios realizados a petición del programa usuario mediante las instrucciones:l READ_STS (lectura de las palabras de estado),l WRITE_CMD (escritura de las palabras de comando)l WRITE_PARAM (escritura des parámetros de ajuste),l READ_PARAM (lectura de los parámetros de ajuste),l SAVE_PARAM (guardar parámetros de ajuste),l RESTORE_PARAM (restitución de los parámetros de ajuste).Estos intercambios se aplican a un conjunto de objetos %MW del mismo tipo (esta-do, comandos o parámetros) de una misma vía.
Principio general de uso de las instrucciones explícitas
El esquema a continuación presenta los diferentes tipos posibles de intercambios explícitos entre el procesador del autómata y el módulo (o la interfaz integrada).
Nota: Estos objetos no son indispensables en la programación de una función es-pecífica, pero aportan informaciones adicionales (por ej.: Tipo de fallo de una vía...) así como comandos adicionales (por ej.: comando de posicionamiento y ajuste) para realizar una programación más puntera de la función específica.
Parámetros de estado
Parámetros de ajusteactual
Parámetros de ajusteiniciales
READ_STS
WRITE_CMD
WRITE_PARAM
READ_PARAM
SAVE_PARAM
RESTORE_PARAM
Parámetros de comando
Parámetros de estado
Parámetros de ajusteactual
Parámetros de comando
Objetos %MWxy.i.r o
%MWxy.MOD.r (1)
(1) Únicamente con las instrucciones READ_STS y WRITE_CMD.
Procesador del autómata Módulo de función específica o interfaz
función específica integrada
180 TLX DS 57 PL7 40S 09.2000

Objetos de lenguaje
Gestión de los intercambios
Cuando se da un intercambio explícito puede resultar interesante comprobar su de-sarrollo, por ejemplo, para tener en cuenta los datos leídos sólo cuando el intercam-bio se realice correctamente.Para ello, dispone de dos tipos de información:l la detección de un intercambio en curso (Véase Indicadores de ejecución de un
intercambio explícito: %MWxy.i.0, p. 184),l la confirmación del fin de un intercambio (Véase Confirmación de intercambio ex-
plícito: %MWxy.i.1, p. 184).El cuadro sinóptico a continuación describe el principio de gestión de un intercambio
Ejecución de un intercambio
explícito
Detección de unintercambio en
curso
Confirmación de fin de
intercambio
TLX DS 57 PL7 40S 09.2000 181

Objetos de lenguaje
Gestión del intercambio y confirmación de los objetos explícitos
Presentación Cuando se intercambian los datos entre la memoria del autómata y el módulo, el acoplador puede requerir varios ciclos durante su tarea antes de tenerlos en cuenta. Para la gestión de los intercambios, se utilizan 2 palabras:l %MWxy.i: Intercambio en curso,l %MWxy.i.1: Confirmación.
Ilustración La ilustración que aparece a continuación presenta los diferentes bits significativos en la gestión de los intercambios.
Reconfiguración (X15)Ajuste (X2)Comando (X1)Estado (X0)
Parámetros de estado
Parámetros de comando
Parámetros de ajuste
READ_STS
WRITE_CMD
WRITE_PARAMREAD_PARAMSAVE_PARAMRESTORE_PARAM
182 TLX DS 57 PL7 40S 09.2000

Objetos de lenguaje
Descripción de los bits significativos
Cada uno de los bits de las palabras %MWxy.i y %MWxy.i.1 está asociado a un tipo de parámetro:l los bits en el rango 0 corresponden a los parámetros de estado:
l el bit %MWxy.i.0:X0 indica cuándo se produce una petición de lectura de las palabras de estado,
l los bits en el rango 1 corresponden a los parámetros de comando:l el bit %MWxy.i.0:X1 indica si se envían parámetros de comando a la vía i del
módulo,l el bit %MWxy.i.1:X1 especifica si la vía i del módulo acepta los parámetros de
comando,l los bits en el rango 2 corresponden a los parámetros de ajuste:
l el bit %MWxy.i.0:X2 indica si se intercambian parámetros de ajuste con la vía i del módulo (con WRITE_PARAM, READ_PARAM, SAVE_PARAM, RESTORE_PARAM),
l el bit %MWxy.i.1:X2 especifica si el módulo acepta los parámetros de ajuste. Si el intercambio se realiza correctamente, el bit adopta el valor 0,
l los bits en el rango 15 indican una reconfiguración en la vía i del módulo desde la consola (PC) (modificación de los parámetros de configuración + arranque en frío de la vía).
Ejemplo Fase 1: Emisión de datos mediante la instrucción WRITE_PARAM
Cuando el procesador del autómata decodifica la instrucción, el bit de Intercambio en curso adopta el valor 1 en %MWxy.
Nota: Las palabras de intercambio y de confirmación existen también en el módulo (%MWxy.MOD y %MWxy.MOD.1).
Parámetros de estadoParámetros de comando
Parámetros de ajuste
10
Parámetros de estadoParámetros de comando
Parámetros de ajuste
Memoria autómata Memoria del módulo TSX CFY
TLX DS 57 PL7 40S 09.2000 183
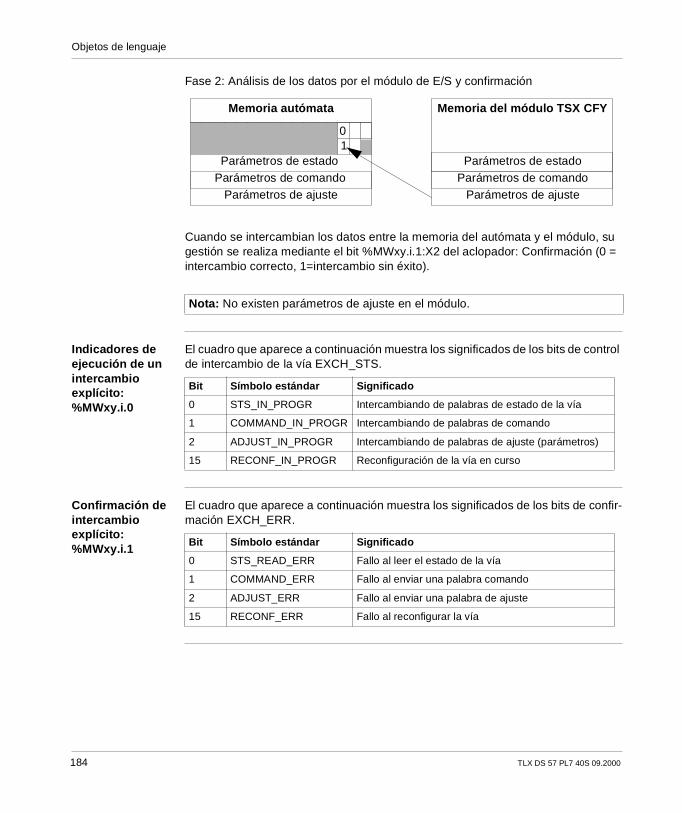
Objetos de lenguaje
Fase 2: Análisis de los datos por el módulo de E/S y confirmación
Cuando se intercambian los datos entre la memoria del autómata y el módulo, su gestión se realiza mediante el bit %MWxy.i.1:X2 del aclopador: Confirmación (0 = intercambio correcto, 1=intercambio sin éxito).
Indicadores de ejecución de un intercambio explícito: %MWxy.i.0
El cuadro que aparece a continuación muestra los significados de los bits de control de intercambio de la vía EXCH_STS.
Confirmación de intercambio explícito: %MWxy.i.1
El cuadro que aparece a continuación muestra los significados de los bits de confir-mación EXCH_ERR.
Nota: No existen parámetros de ajuste en el módulo.
Parámetros de estadoParámetros de comando
Parámetros de ajuste
10
Parámetros de estadoParámetros de comando
Parámetros de ajuste
Memoria autómata Memoria del módulo TSX CFY
Bit Símbolo estándar Significado
0 STS_IN_PROGR Intercambiando de palabras de estado de la vía
1 COMMAND_IN_PROGR Intercambiando de palabras de comando
2 ADJUST_IN_PROGR Intercambiando de palabras de ajuste (parámetros)
15 RECONF_IN_PROGR Reconfiguración de la vía en curso
Bit Símbolo estándar Significado
0 STS_READ_ERR Fallo al leer el estado de la vía
1 COMMAND_ERR Fallo al enviar una palabra comando
2 ADJUST_ERR Fallo al enviar una palabra de ajuste
15 RECONF_ERR Fallo al reconfigurar la vía
184 TLX DS 57 PL7 40S 09.2000
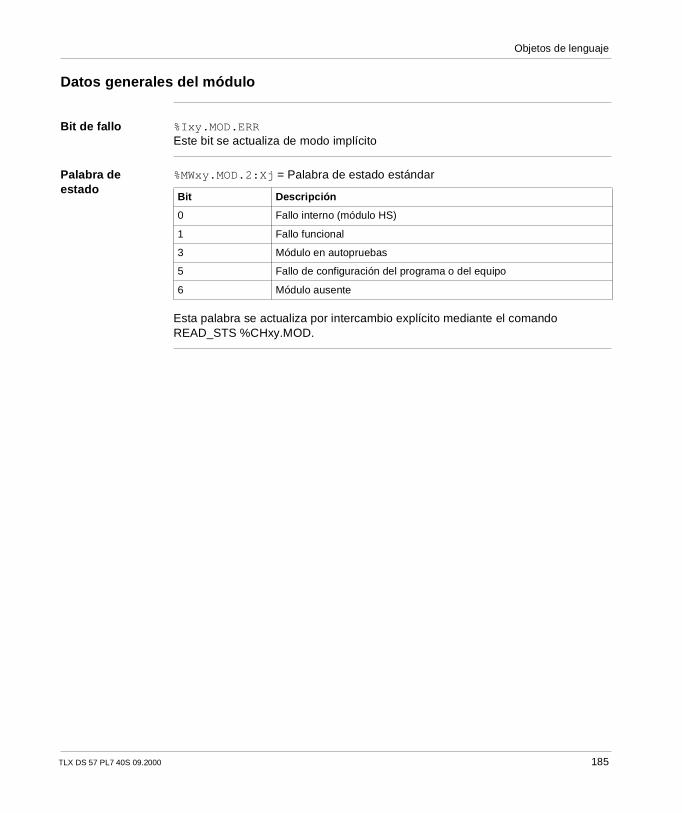
Objetos de lenguaje
Datos generales del módulo
Bit de fallo %Ixy.MOD.ERREste bit se actualiza de modo implícito
Palabra de estado
%MWxy.MOD.2:Xj = Palabra de estado estándar
Esta palabra se actualiza por intercambio explícito mediante el comando READ_STS %CHxy.MOD.
Bit Descripción
0 Fallo interno (módulo HS)
1 Fallo funcional
3 Módulo en autopruebas
5 Fallo de configuración del programa o del equipo
6 Módulo ausente
TLX DS 57 PL7 40S 09.2000 185
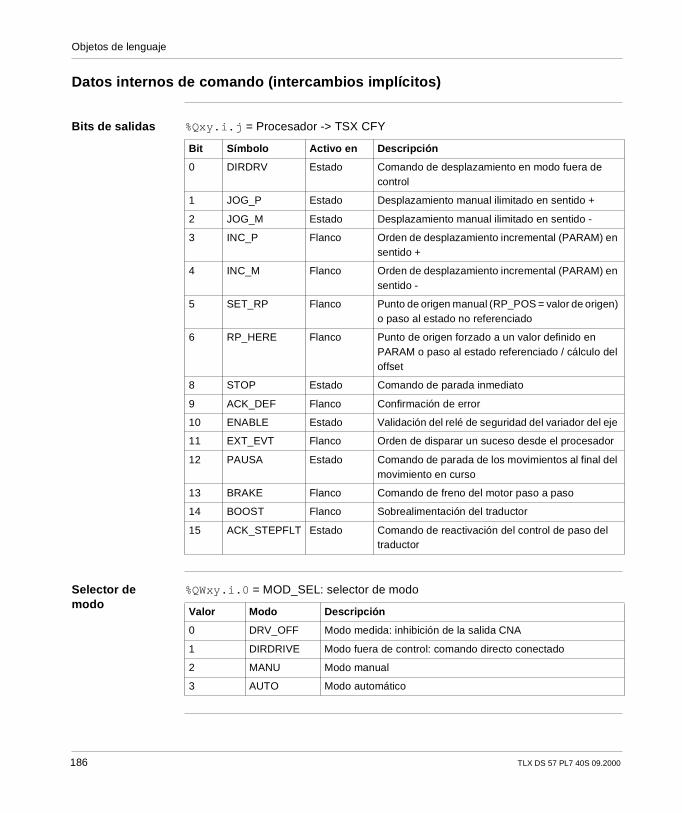
Objetos de lenguaje
Datos internos de comando (intercambios implícitos)
Bits de salidas %Qxy.i.j = Procesador -> TSX CFY
Selector de modo
%QWxy.i.0 = MOD_SEL: selector de modo
Bit Símbolo Activo en Descripción
0 DIRDRV Estado Comando de desplazamiento en modo fuera de control
1 JOG_P Estado Desplazamiento manual ilimitado en sentido +
2 JOG_M Estado Desplazamiento manual ilimitado en sentido -
3 INC_P Flanco Orden de desplazamiento incremental (PARAM) en sentido +
4 INC_M Flanco Orden de desplazamiento incremental (PARAM) en sentido -
5 SET_RP Flanco Punto de origen manual (RP_POS = valor de origen) o paso al estado no referenciado
6 RP_HERE Flanco Punto de origen forzado a un valor definido en PARAM o paso al estado referenciado / cálculo del offset
8 STOP Estado Comando de parada inmediato
9 ACK_DEF Flanco Confirmación de error
10 ENABLE Estado Validación del relé de seguridad del variador del eje
11 EXT_EVT Flanco Orden de disparar un suceso desde el procesador
12 PAUSA Estado Comando de parada de los movimientos al final del movimiento en curso
13 BRAKE Flanco Comando de freno del motor paso a paso
14 BOOST Flanco Sobrealimentación del traductor
15 ACK_STEPFLT Estado Comando de reactivación del control de paso del traductor
Valor Modo Descripción
0 DRV_OFF Modo medida: inhibición de la salida CNA
1 DIRDRIVE Modo fuera de control: comando directo conectado
2 MANU Modo manual
3 AUTO Modo automático
186 TLX DS 57 PL7 40S 09.2000

Objetos de lenguaje
Modulación de velocidad
%QWxy.i.1 = CMV: modulación de velocidadValor = valor de consigna de modulación de velocidad. Esta consigna está com-prendida entre 0 y 2, por intervalos de 1/1000.
Incremento de desplazamiento
%QDxy.i.2 = PARAM: valor del incremento de desplazamiento
TLX DS 57 PL7 40S 09.2000 187
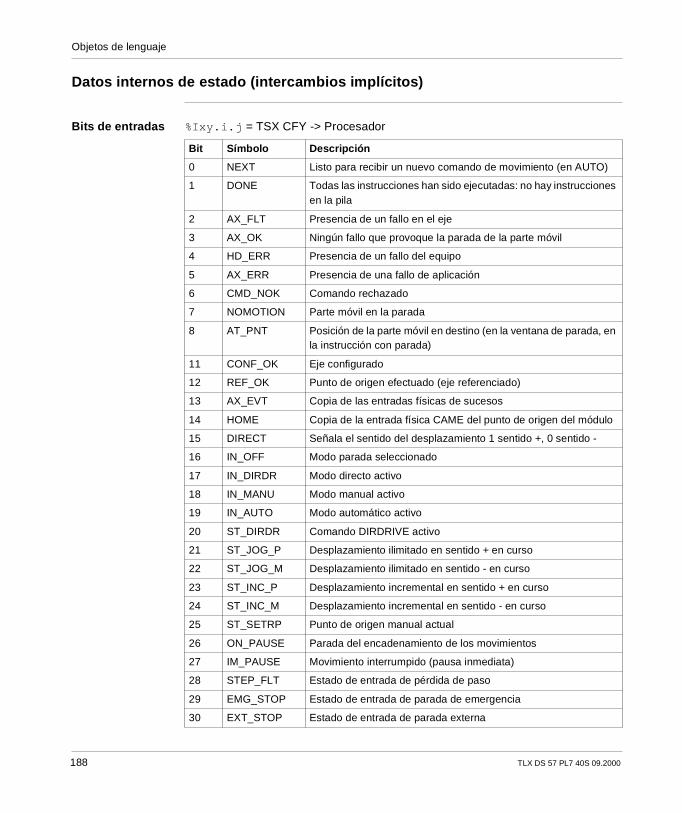
Objetos de lenguaje
Datos internos de estado (intercambios implícitos)
Bits de entradas %Ixy.i.j = TSX CFY -> Procesador
Bit Símbolo Descripción
0 NEXT Listo para recibir un nuevo comando de movimiento (en AUTO)
1 DONE Todas las instrucciones han sido ejecutadas: no hay instrucciones en la pila
2 AX_FLT Presencia de un fallo en el eje
3 AX_OK Ningún fallo que provoque la parada de la parte móvil
4 HD_ERR Presencia de un fallo del equipo
5 AX_ERR Presencia de una fallo de aplicación
6 CMD_NOK Comando rechazado
7 NOMOTION Parte móvil en la parada
8 AT_PNT Posición de la parte móvil en destino (en la ventana de parada, en la instrucción con parada)
11 CONF_OK Eje configurado
12 REF_OK Punto de origen efectuado (eje referenciado)
13 AX_EVT Copia de las entradas físicas de sucesos
14 HOME Copia de la entrada física CAME del punto de origen del módulo
15 DIRECT Señala el sentido del desplazamiento 1 sentido +, 0 sentido -
16 IN_OFF Modo parada seleccionado
17 IN_DIRDR Modo directo activo
18 IN_MANU Modo manual activo
19 IN_AUTO Modo automático activo
20 ST_DIRDR Comando DIRDRIVE activo
21 ST_JOG_P Desplazamiento ilimitado en sentido + en curso
22 ST_JOG_M Desplazamiento ilimitado en sentido - en curso
23 ST_INC_P Desplazamiento incremental en sentido + en curso
24 ST_INC_M Desplazamiento incremental en sentido - en curso
25 ST_SETRP Punto de origen manual actual
26 ON_PAUSE Parada del encadenamiento de los movimientos
27 IM_PAUSE Movimiento interrumpido (pausa inmediata)
28 STEP_FLT Estado de entrada de pérdida de paso
29 EMG_STOP Estado de entrada de parada de emergencia
30 EXT_STOP Estado de entrada de parada externa
188 TLX DS 57 PL7 40S 09.2000
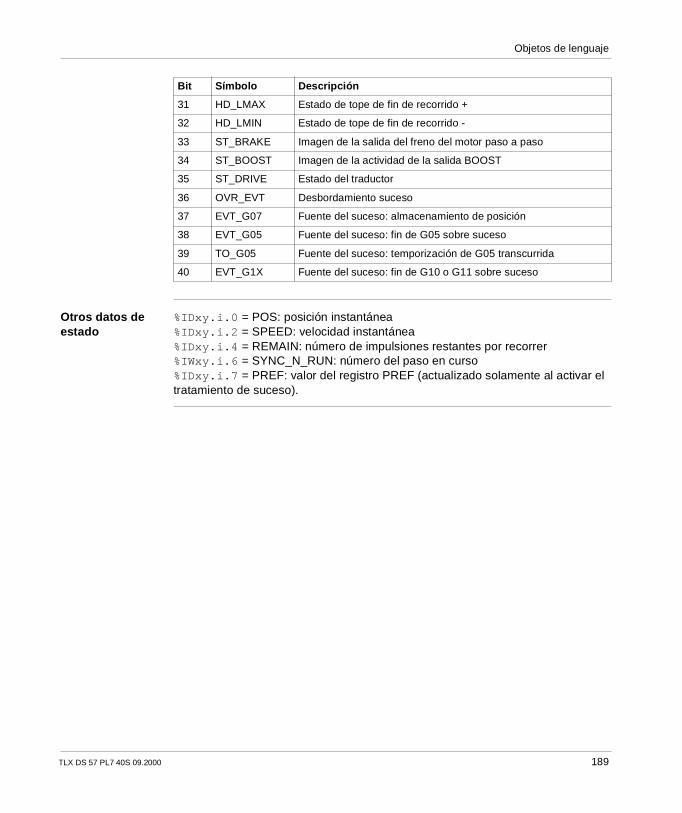
Objetos de lenguaje
Otros datos de estado
%IDxy.i.0 = POS: posición instantánea%IDxy.i.2 = SPEED: velocidad instantánea%IDxy.i.4 = REMAIN: número de impulsiones restantes por recorrer%IWxy.i.6 = SYNC_N_RUN: número del paso en curso%IDxy.i.7 = PREF: valor del registro PREF (actualizado solamente al activar el tratamiento de suceso).
31 HD_LMAX Estado de tope de fin de recorrido +
32 HD_LMIN Estado de tope de fin de recorrido -
33 ST_BRAKE Imagen de la salida del freno del motor paso a paso
34 ST_BOOST Imagen de la actividad de la salida BOOST
35 ST_DRIVE Estado del traductor
36 OVR_EVT Desbordamiento suceso
37 EVT_G07 Fuente del suceso: almacenamiento de posición
38 EVT_G05 Fuente del suceso: fin de G05 sobre suceso
39 TO_G05 Fuente del suceso: temporización de G05 transcurrida
40 EVT_G1X Fuente del suceso: fin de G10 o G11 sobre suceso
Bit Símbolo Descripción
TLX DS 57 PL7 40S 09.2000 189
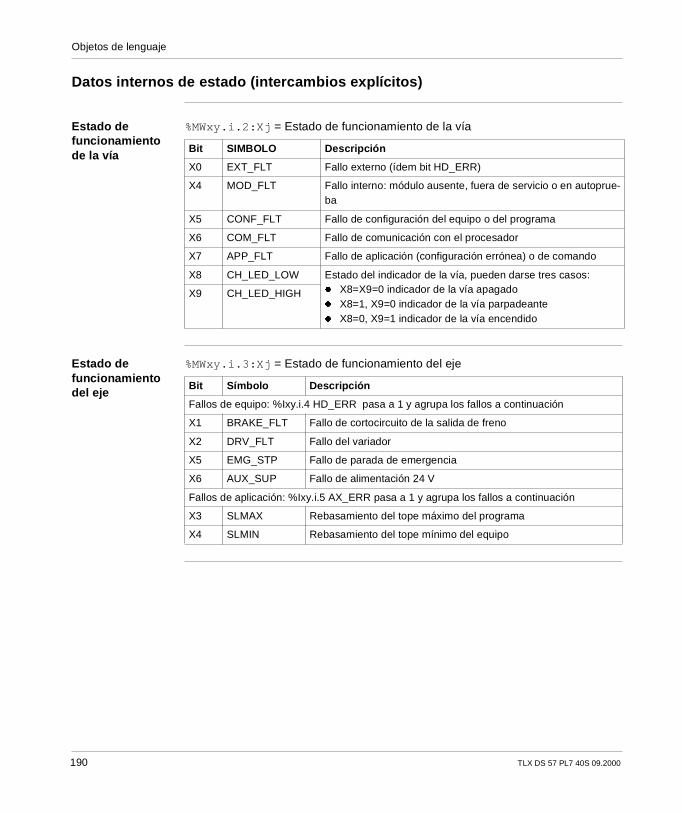
Objetos de lenguaje
Datos internos de estado (intercambios explícitos)
Estado de funcionamiento de la vía
%MWxy.i.2:Xj = Estado de funcionamiento de la vía
Estado de funcionamiento del eje
%MWxy.i.3:Xj = Estado de funcionamiento del eje
Bit SIMBOLO Descripción
X0 EXT_FLT Fallo externo (ídem bit HD_ERR)
X4 MOD_FLT Fallo interno: módulo ausente, fuera de servicio o en autoprue-ba
X5 CONF_FLT Fallo de configuración del equipo o del programa
X6 COM_FLT Fallo de comunicación con el procesador
X7 APP_FLT Fallo de aplicación (configuración errónea) o de comando
X8 CH_LED_LOW Estado del indicador de la vía, pueden darse tres casos:l X8=X9=0 indicador de la vía apagadol X8=1, X9=0 indicador de la vía parpadeantel X8=0, X9=1 indicador de la vía encendido
X9 CH_LED_HIGH
Bit Símbolo Descripción
Fallos de equipo: %Ixy.i.4 HD_ERR pasa a 1 y agrupa los fallos a continuación
X1 BRAKE_FLT Fallo de cortocircuito de la salida de freno
X2 DRV_FLT Fallo del variador
X5 EMG_STP Fallo de parada de emergencia
X6 AUX_SUP Fallo de alimentación 24 V
Fallos de aplicación: %Ixy.i.5 AX_ERR pasa a 1 y agrupa los fallos a continuación
X3 SLMAX Rebasamiento del tope máximo del programa
X4 SLMIN Rebasamiento del tope mínimo del equipo
190 TLX DS 57 PL7 40S 09.2000

Objetos de lenguaje
Otros datos de estado
%MWxy.i.4 = N_RUN: número del paso actual%MWxy.i.5 = G9_COD: tipo de desplazamiento en curso%MWxy.i.6 = G_COD: código de la instrucción actual%MWxy.i.7 = CMD_FLT: confirmación de rechazo%MDxy.i.8 = T_XPOS: destino de la posición a alcanzar%MDxy.i.10 = T_SPEED: velocidad a alcanzar
Nota: todos estos datos internos de estado se actualizan cuando se ejecuta la in-strucción READ_PARAM %CHxy.i
TLX DS 57 PL7 40S 09.2000 191
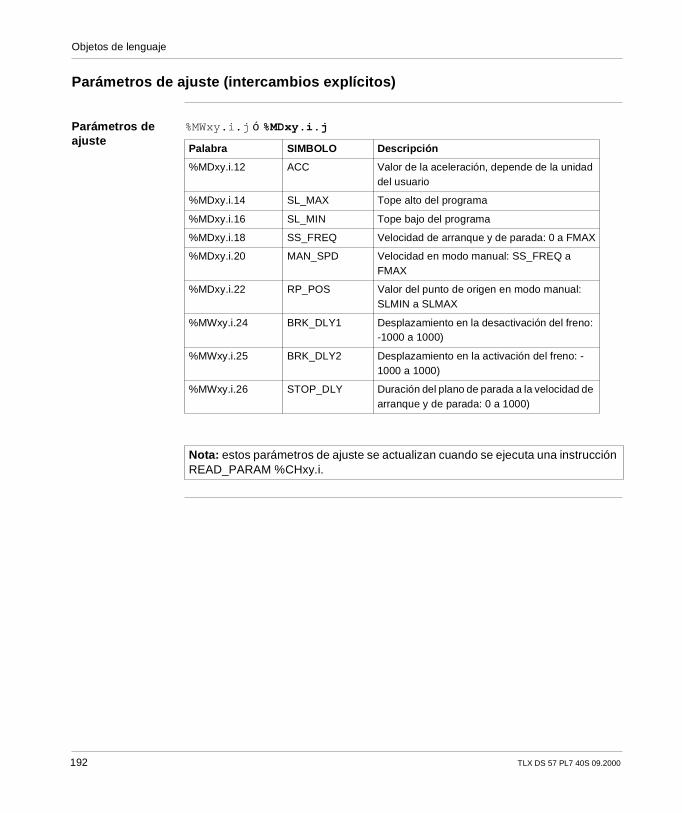
Objetos de lenguaje
Parámetros de ajuste (intercambios explícitos)
Parámetros de ajuste
%MWxy.i.j ó %MDxy.i.j
Palabra SIMBOLO Descripción
%MDxy.i.12 ACC Valor de la aceleración, depende de la unidad del usuario
%MDxy.i.14 SL_MAX Tope alto del programa
%MDxy.i.16 SL_MIN Tope bajo del programa
%MDxy.i.18 SS_FREQ Velocidad de arranque y de parada: 0 a FMAX
%MDxy.i.20 MAN_SPD Velocidad en modo manual: SS_FREQ a FMAX
%MDxy.i.22 RP_POS Valor del punto de origen en modo manual: SLMIN a SLMAX
%MWxy.i.24 BRK_DLY1 Desplazamiento en la desactivación del freno: -1000 a 1000)
%MWxy.i.25 BRK_DLY2 Desplazamiento en la activación del freno: -1000 a 1000)
%MWxy.i.26 STOP_DLY Duración del plano de parada a la velocidad de arranque y de parada: 0 a 1000)
Nota: estos parámetros de ajuste se actualizan cuando se ejecuta una instrucción READ_PARAM %CHxy.i.
192 TLX DS 57 PL7 40S 09.2000
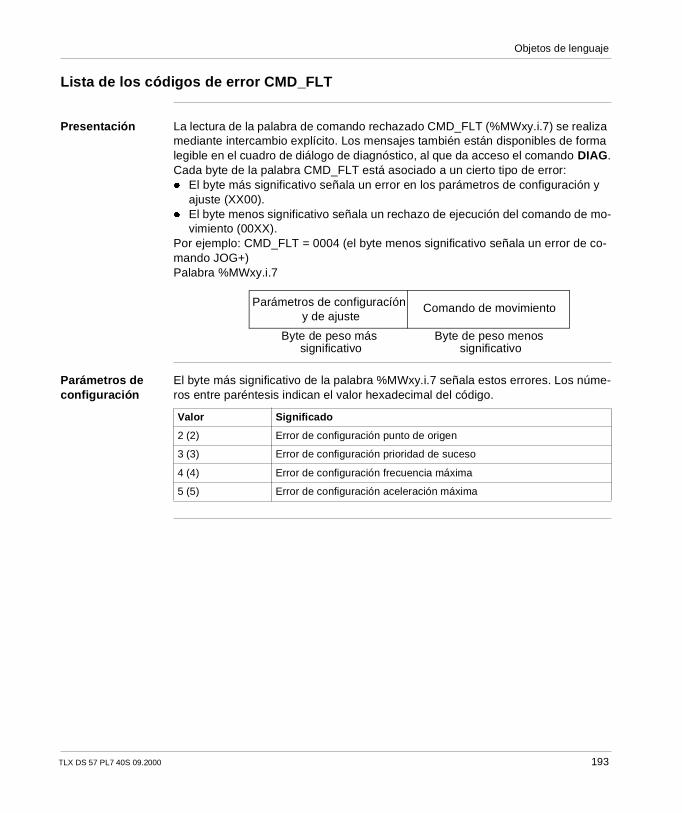
Objetos de lenguaje
Lista de los códigos de error CMD_FLT
Presentación La lectura de la palabra de comando rechazado CMD_FLT (%MWxy.i.7) se realiza mediante intercambio explícito. Los mensajes también están disponibles de forma legible en el cuadro de diálogo de diagnóstico, al que da acceso el comando DIAG.Cada byte de la palabra CMD_FLT está asociado a un cierto tipo de error: l El byte más significativo señala un error en los parámetros de configuración y
ajuste (XX00). l El byte menos significativo señala un rechazo de ejecución del comando de mo-
vimiento (00XX).Por ejemplo: CMD_FLT = 0004 (el byte menos significativo señala un error de co-mando JOG+)Palabra %MWxy.i.7
Parámetros de configuración
El byte más significativo de la palabra %MWxy.i.7 señala estos errores. Los núme-ros entre paréntesis indican el valor hexadecimal del código.
Parámetros de configuracíón y de ajuste
Comando de movimiento
Byte de peso más significativo
Byte de peso menos significativo
Valor Significado
2 (2) Error de configuración punto de origen
3 (3) Error de configuración prioridad de suceso
4 (4) Error de configuración frecuencia máxima
5 (5) Error de configuración aceleración máxima
TLX DS 57 PL7 40S 09.2000 193

Objetos de lenguaje
Parámetro de ajuste
El byte más significativo de la palabra %MWxy.i.7 señala estos errores. Los núme-ros entre paréntesis indican el valor hexadecimal del código.
Comando de movimiento rechazado
Estos errores están señalados en el byte menos significativo de la palabra %MWxy.i.7. Los números entre paréntesis indican el valor hexadecimal del código.
Valor Significado
7 (07) Error de parámetro perfil de aceleración
8 (08) Error de parámetro tope superior de programa
9 (09) Error de parámetro tope inferior de programa
10 (0A) Error de parámetro frecuencia de arranque y de parada
11 (0B) Error de parámetro frecuencia en modo manual
12 (0C) Error de parámetro valor del punto de origen
13 (0D) Error de parámetro tiempo de espera al desactivar el freno
14 (0E) Error de parámetro tiempo de espera al activar el freno
15 (0F) Error de parámetro plano de parada
32 (20) Error de parámetro, más de un WRITE_PARAM durante el movimiento
Valor Mensaje
1 (1) Error de comando manual condiciones insuficientes (Modo, Valor,...)
2 (2) Error de comando manual movimiento manual en curso
3 (3) Error de comando manual comandos simultáneos
4 (4) Error de comando manual JogP
5 (5) Error de comando manual JogM
6 (6) Error de comando manual IncP
7 (7) Error de comando manual IncM
8 (8) Error de comando manual parámetro de IncP
9 (9) Error de comando manual parámetro de IncM
10 (0A) Error de comando manual PO manual
11 (0B) Error de comando manual PO forzado
12 (0C) Error de comando Auto condiciones insuficientes (parámetros)
13 (0D) Error de comando Auto movimiento auto en curso
14 (0E) Error de comando SMOVE condiciones insuficientes (Modo)
15 (0F) Error de comando SMOVE G01 (1)
16 (10) Error de comando SMOVE G09 (1)
17 (11) Error de comando SMOVE G10 (1)
18 (12) Error de comando SMOVE G11 (1)
194 TLX DS 57 PL7 40S 09.2000

Objetos de lenguaje
21 (15) Error de comando SMOVE G14 (1)
22 (16) Error de comando SMOVE G05 (1)
23 (17) Error de comando SMOVE G07 (1)
24 (18) Error de comando SMOVE G62 (1)
25 (19) Error de comando ejecución SMOVE
26 (1A) Error de comando Auto move en curso
27 (1B) Error de comando Auto, pila llena
48 (30) Error de comando DIRDRIVE, comando insuficiente
49 (31) Error de comando DIRDRIVE, con cambio de modo en curso
50 (32) Error de comando DIRDRIVE, con el eje en movimiento
51 (33) Error de comando DIRDRIVE, con el eje parado
52 (34) Error de comando DIRDRIVE, con el eje no validado
53 (35) Error de comando DIRDRIVE, con fallo con bloqueo
54 (36) Error de comando DIRDRIVE, con frecuencia inferior a SS_FREQ
55 (37) Error de comando DIRDRIVE, con frecuencia superior a FMAX
56 (38) Error de comando DIRDRIVE, con el eje en el tope de fin de recorrido +
57 (39) Error de comando DIRDRIVE, con el eje en el tope de fin de recorrido -
58 (3A) Error de comando DIRDRIVE, con el eje fuera del tope de fin de recorrido +
59 (3B) Error de comando DIRDRIVE, con el eje fuera del tope de fin de recorrido -
60 (3C) Error de comando DIRDRIVE, con el eje fuera del tope superior del programa
61 (3D) Error de comando DIRDRIVE, con el eje fuera del tope inferior del programa
96 (60) Error de comando manual JogP en tope superior del programa
97 (61) Error de comando manual JogP eje parado
101 (65) Error de comando manual JogP desplazamiento JogM en curso
102 (66) Error de comando manual JogP en el tope de fin de recorrido +
103 (67) Error de comando manual JogP posición superior al tope de fin de recorrido +
108 (6C) Error de comando manual JogP fallo con bloqueo diferente de tope del progra-ma
109 (6D) Error de comando manual JogP fallo con bloqueo de tope de programa no con-firmado
110 (6E) Error de comando manual JogP eje no validado
113 (71) Error de comando manual JogM eje parado
116 (74) Error de comando manual JogM desplazamiento JogP en curso
118 (76) Error de comando manual JogM en el tope de fin de recorrido -
119 (77) Error de comando manual JogM posición superior al tope de fin de recorrido -
Valor Mensaje
TLX DS 57 PL7 40S 09.2000 195
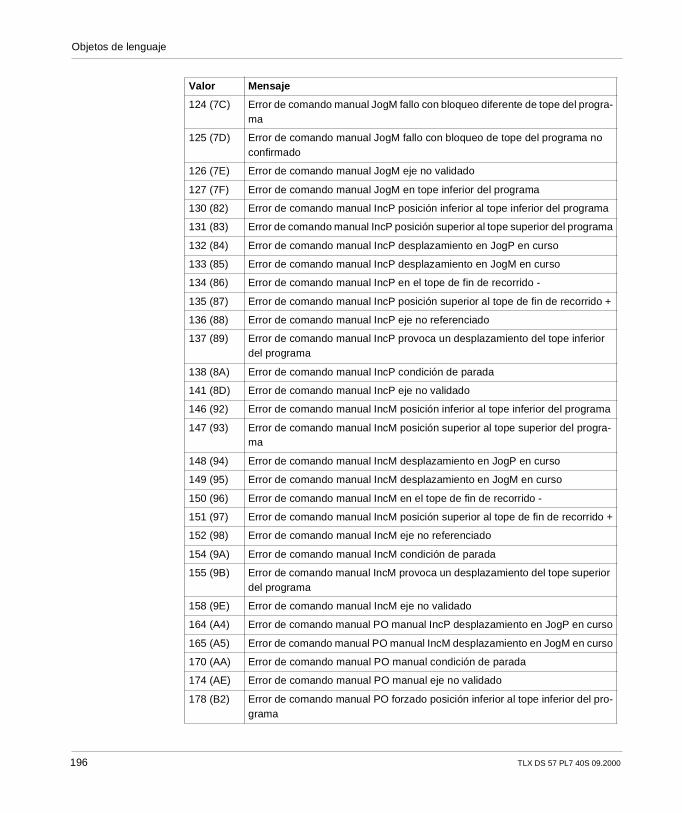
Objetos de lenguaje
124 (7C) Error de comando manual JogM fallo con bloqueo diferente de tope del progra-ma
125 (7D) Error de comando manual JogM fallo con bloqueo de tope del programa no confirmado
126 (7E) Error de comando manual JogM eje no validado
127 (7F) Error de comando manual JogM en tope inferior del programa
130 (82) Error de comando manual IncP posición inferior al tope inferior del programa
131 (83) Error de comando manual IncP posición superior al tope superior del programa
132 (84) Error de comando manual IncP desplazamiento en JogP en curso
133 (85) Error de comando manual IncP desplazamiento en JogM en curso
134 (86) Error de comando manual IncP en el tope de fin de recorrido -
135 (87) Error de comando manual IncP posición superior al tope de fin de recorrido +
136 (88) Error de comando manual IncP eje no referenciado
137 (89) Error de comando manual IncP provoca un desplazamiento del tope inferior del programa
138 (8A) Error de comando manual IncP condición de parada
141 (8D) Error de comando manual IncP eje no validado
146 (92) Error de comando manual IncM posición inferior al tope inferior del programa
147 (93) Error de comando manual IncM posición superior al tope superior del progra-ma
148 (94) Error de comando manual IncM desplazamiento en JogP en curso
149 (95) Error de comando manual IncM desplazamiento en JogM en curso
150 (96) Error de comando manual IncM en el tope de fin de recorrido -
151 (97) Error de comando manual IncM posición superior al tope de fin de recorrido +
152 (98) Error de comando manual IncM eje no referenciado
154 (9A) Error de comando manual IncM condición de parada
155 (9B) Error de comando manual IncM provoca un desplazamiento del tope superior del programa
158 (9E) Error de comando manual IncM eje no validado
164 (A4) Error de comando manual PO manual IncP desplazamiento en JogP en curso
165 (A5) Error de comando manual PO manual IncM desplazamiento en JogM en curso
170 (AA) Error de comando manual PO manual condición de parada
174 (AE) Error de comando manual PO manual eje no validado
178 (B2) Error de comando manual PO forzado posición inferior al tope inferior del pro-grama
Valor Mensaje
196 TLX DS 57 PL7 40S 09.2000

Objetos de lenguaje
(1) Indica que uno de los parámetros de la función SMOVE no es conforme. Ejem-plos: código de tipo de desplazamiento erróneo, posición fuera de los topes del pro-grama, velocidad superior a FMAX,...
179 (B3) Error de comando manual PO forzado posición superior al tope superior del programa
180 (B4) Error de comando manual PO forzado desplazamiento en JogP en curso
181 (B5) Error de comando manual PO forzado desplazamiento en JogM en curso
189 (BD) Error de comando manual PO forzado en fallo tope del progrma no confirmado
Valor Mensaje
TLX DS 57 PL7 40S 09.2000 197

Objetos de lenguaje
198 TLX DS 57 PL7 40S 09.2000
CBAÍndice
Symbols%Ixy.i.ERR, 107
AAjuste
Freno, 129Operaciones preliminares, 124Parámetros, 125Parámetros del modo manual, 133Plano de parada, 131Reconfiguración, 136Trayectoria, 127
Alimentación 24 V, 108Aplicación
Guardar, 47Aprendizaje de cotas, 167Archivado, 157Arranque de los topes de programa, 115Auto, 154Autómata en RUN, 103Ayuda al diagnóstico, 163
CCCX 17, 159CMD_FLT, 193Cmdo. rechazado, 150CMV, 148Códigos de error, 193Comando rechazado, 111Comandos rechazados, 104
TLX DS 57 PL7 40S 09/2000
Conexión, 103Configuración
Accesos, 50Cómo acceder a..., 54Declaración de un módulo, 51Freno, 64Inversión del traductor, 62Modo de comando, 58Parámetros de comando, 60Presentación, 50Punto de origen, 66Sobrealimentación, 63Suceso, 65Unidades de usuario, 56Validación, 71
Corte y reanudación de corriente, 103Cortocircuito de la salida freno, 108Ctrl. traductor, 148
DDepuración
Detalles de los campos, 146Diagnóstico, 155Modo automático, 154Modo Directo, 152Modo manual, 153Modo parada, 151Pantalla, 142, 144Principio, 140
Desplazamiento a vista, 114Desplazamiento incremental, 116
199

Index
Diálogo del operador, 159DIRDRIVE, 119Documentación, 157DONE, 147
EEjemplo
Acciones, 40Ajuste, 29Archivado, 47Códigos de instrucción, 92Configuración, 27Depuración, 46Descripción, 22Grafcet, 38Modo manual, 44movimientos repetitivos, 92Posterior, 41Preliminar, 35Prerrequisitos, 26Simbolización, 31Transferencia, 43Transiciones, 39
FF Actual, 146F Destino, 146Fallos
Bits asociados, 107Confirmación, 106Niveles de señalización, 105Programación, 105Señalización, 105
Fallos con bloqueo, 104Fallos críticos, 104Fallos de equipo externos, 104, 108Fallos de la aplicación, 104, 110Fallos de módulo, 104Fallos no críticos, 105Fin recorrido, 148Freno, 149
200
GG, 146G9, 146Guardado
Parámetros de ajuste, 135
IINC, 112INC-, 149INC+, 149INC_M, 116INC_P, 116Intercambios
Síntesis, 177
JJOG, 112JOG-, 149JOG+, 149JOG_M, 114JOG_P, 114
LLeva EVT, 148Leva PO, 148Ley de velocidad, 119
MManu, 153Modo manual, 112Modo parada, 121, 151Modos de funcionamiento, 103
NN, 146NEXT, 147Niveles de gravedad, 104
TLX DS 57 PL7 40S 09/2000

Index
OObjetos lenguaje
Comando, 186Datos de estado, 188Datos de estado explícitos, 190Datos de módulo, 185Generalidades, 176Gestión de los intercambios, 182Implícitos, 179Intercambios explícitos, 180Parámetros de ajuste, 192
OFF, 121, 151
PParada de un movimiento, 113, 120Parada de urgencia, 108Parada externa, 148Paso de RUN a STOP, 103Pausa, 149Pausa inmediata, 147Pérdida de paso, 148plano de parada, 131Posición, 146Programa
Encadenamiento de comandos, 94Transferencia, 43
Programación, 119Códigos de instrucción, 82Descripción de los códigos de instrucción, 86Desplazamiento a vista, 114Desplazamiento elemental, 84Desplazamiento incremental, 116Función SMOVE, 78Gestión de fallos, 104Modo manual, 112Modos de funcionamiento de una vía, 76Parámetros SMOVE, 80Pausa diferida, 97Pausa inmediata, 99Principio, 75Punto de origen, 117Punto de origen forzado, 118Tratamiento de sucesos, 101
TLX DS 57 PL7 40S 09/2000
Punto AT, 147Punto de origen, 117Punto de origen forzado, 118
RReactivar paso, 148Reconfiguración, 103Réglage
Validation, 134Rendimiento, 171Restitución
Parámetros de ajuste, 135RP_HERE, 118
SSET_RP, 117Sincro UC, 149Sincronización de varios ejes, 97SMOVE
Código de desplazamiento, 84Código de instrucción, 86Descripción de las instrucciones, 86Desplazamiento elemental, 84
Sobrealimentación, 149Supervisión de los fallos, 162
TTopes de programa, 110Traductor, 109Tratamiento de sucesos, 101
VValidación, 134Velocidad, 146Velocidad de acercamiento, 117Velocidad de desplazamiento, 114, 116
XX Actual, 146X Destino, 146
201
Index
X Resto, 146
202
TLX DS 57 PL7 40S 09/2000