polen.itu.edu.trpolen.itu.edu.tr/bitstream/11527/7070/1/10346.pdf · Ġstanbul teknĠk...
TRANSCRIPT
ĠSTANBUL TEKNĠK ÜNĠVERSĠTESĠ FEN BĠLĠMLERĠ ENSTĠTÜSÜ
NESNESEL PROGRAMLAMA YÖNTEMLERĠ ĠLE YAPI SĠSTEMLERĠNĠN
DOĞRUSAL OLMAYAN ANALĠZĠ
DOKTORA TEZĠ
Murat YILMAZ
(501032103)
Tezin Enstitüye Verildiği Tarih : 28 Eylül 2009
Tezin Savunulduğu Tarih : 12 Ocak 2010
Tez DanıĢmanı : Prof. Dr. A. Yalçın AKÖZ (Maltepe Ü.)
Diğer Jüri Üyeleri : Prof. Dr. Ġbrahim BAKIRTAġ (ĠTÜ)
Prof. Dr. Surkay AKBAROV (YTÜ)
Prof. Dr. Hasan ENGĠN (ĠTÜ)
Prof. Dr. Semih TEZCAN (BÜ)
OCAK 2010

ii

iii
Kardeşlerim Berna ve Burak’ a

iv

v
ÖNSÖZ
Günümüzde yapı sistemlerinin analizinde sonlu elemanlar yönteminin kullanımı
kaçınılmaz hale gelmiştir. Gelişen ihtiyaçlar dahilinde, analizler karmaşıklaştıkça
yapılan modellemeler ve bu modelleri programlama ortamına aktarmak zorlaşmıştır.
Bilgisayar teknolojileri açısından bakıldığında bir yandan bilgisayarlar hızlanmakta
ve kapasiteleri artmakta olup, diğer yandan programlama teknikleri gelişmektedir.
Programlama tekniklerinin en başarılı ve yaygın kullanılanlarından biri de nesne
yönelimli programlamadır. Bu programlama tekniği doğal yapısı itibari ile sonlu
eleman yöntemindeki mevcut kavramlarla büyük bir uyum sağlamaktadır.
Bu teknik ile sonlu eleman programlamak için, modellemede kullanılan tüm araçları
birer nesne gibi düşünmek ve bu nesnelerin birbirleri ile iletişimini kurgulamak
gerekmektedir.
Tez kapsamında sonlu eleman geliştiricileri için nesnesel yapıya sahip yeni bir
programlama dili geliştirilmiş (FEMLANG) ve bu dili kullanmanın avantajları ortaya
konulmaya çalışılmıştır.
Sonlu eleman geliştiricileri için gerekli araçlar dilin yapısında olmak durumundadır.
Dilin geliştirme sürecinde bu araçları belirlemek için örnek problemlere ihtiyaç
duyulmuştur. Örnek problem olarak büyük ölçüde çubuk sistemlerin büyük yer
değiştirme hesabı ele alınmış olup ―MyBeam‖ adlı oldukça iyi performanslı yeni bir
çubuk eleman geliştirilmiştir.
Tez bu haliyle bir başlangıç niteliğindedir. Geniş bir konuda çözüm üreten yetenekli
bir programlama dili yazmak ucu daima gelişmeye açık olacak bir konudur. Bu
yüzden tezin bir noktada bitirilmesi zorunlu olmuştur.
Tezin mevcut haline gelmesinde bana en büyük desteği veren sayın danışman hocam
Prof. Dr. Yalçın AKÖZ‘e önemli bir teşekkür borçluyum. Ayrıca tez izleme
komitesindeki sayın hocalarım Prof. Dr. İbrahim BAKIRTAŞ ve Prof. Dr. Surkay
AKBAROV ‗un da eleştirileri sayesinde özellikle tezin teorik çalışmalar içeren
kısımlarının şekillenmesinde önemli katkıları olmuştur. Bu yüzden kendilerine
teşekkür ederim. Ayrıca diğer hocalarıma, aileme ve tüm arkadaşlarıma bana karşı
göstermiş oldukları sabır ve destekten ötürü teşekkür etmek istiyorum.
Ve son olarak TÜBİTAK Bilim İnsanı Destekleme Daire Başkanlığına üç yıl
boyunca bana vermiş oldukları burs desteği için sonsuz teşekkürlerimi sunmak
istiyorum.
Umarım kendimde bu tezin devamını getirme gücü bulabilirim.
Ocak 2010 Murat YILMAZ
(Yüksek İnşaat Mühendisi)

vi

vii
ĠÇĠNDEKĠLER
Sayfa
ÖNSÖZ........................................................................................................................v
ĠÇĠNDEKĠLER ........................................................................................................ vii
KISALTMALAR....................................................................................................... ix
ÇĠZELGE LĠSTESĠ .................................................................................................. xi
ġEKĠL LĠSTESĠ ...................................................................................................... xiii
SEMBOL LĠSTESĠ .................................................................................................. xv
ÖZET.......................................................................................................................xvii
SUMMARY ............................................................................................................. xix
1. GĠRĠġ.......................................................................................................................1 1.1 Tezin Amacı ....................................................................................................... 1
1.2 Literatür Özeti .................................................................................................... 3
1.3 Yol Haritası ........................................................................................................ 4
2. GEOMETRĠK YADDOĞRUSAL HESAP.......................................................... 5 2.1 Deformasyon Gradyanının Hesaplanması .......................................................... 6
2.2 Diferansiyel Hacim ve Alan Bağıntıları ............................................................. 7
2.3 Green-Lagrange Genleme Tansörü .................................................................... 9
2.3.1 Birim boy değişimleri ................................................................................. 9
2.3.2 Açı değişimleri .......................................................................................... 11
2.4 Cauchy ve Piola-Kirchhoff Gerilme Tansörleri ............................................... 13
2.5 Virtüel İş Denklemi .......................................................................................... 14
2.5.1 Virtüel iş denkleminin başlangıç konumunda ifade edilmesi ................... 15
2.5.2 Virtüel iş denkleminin doğrusallaştırılması .............................................. 16
2.6 Sonlu Elemanlar Formülasyonu ....................................................................... 19
2.7. Sonlu Elemanlarda Newyon-Raphson Yöntemi .............................................. 21
2.7. Yaddoğrusal Hesap Uygulaması ..................................................................... 22
3. ÇUBUK SĠSTEMLER ĠÇĠN BÜYÜK YER DEĞĠġTĠRME HESABI ........... 25 3.1 Sadece Normal Kuvvet Taşıyan Sistemler ....................................................... 25
3.1.1 Şekil değiştirme ölçüsünün seçimi ............................................................ 25
3.1.2 Sürekli ortam formülasyonu (sabit alan) ................................................... 28
3.1.3 Sürekli ortam formülasyonu (sıkışmaz malzeme) .................................... 34
3.1.4 Sonlu eleman denklemlerinin oluşturulması ............................................. 35
3.1.5 Birinci mertebe burkulma yükünün belirlenmesi...................................... 37
3.1.6 Örnek kafes sistem analizleri .................................................................... 39
3.1.6.1 Örnek 1 39
3.1.6.2 Örnek 2 41
3.2 Eğilmeye Çalışan Elemanlar ............................................................................ 43
3.2.1 Kinematik bağıntılar ................................................................................. 43
3.2.2 Sonlu eleman denklem takımının elde edilmesi ....................................... 49
3.2.3 Bünye denklemleri ve iç yük vektörünün elde edilmesi ........................... 51
3.2.4 Örnek problemler ...................................................................................... 53
3.2.4.1 Örnek 1 53

viii
3.2.4.2 Örnek 2 54
3.2.5 Doğrusal burkulma problemi .................................................................... 57
3.2.6 Burkulma problemi ................................................................................... 59
3.2.6.1 Örnek 1 59
3.2.7. Bezier eğrileri ile yaddoğrusal kiriş problemi .......................................... 61
3.2.7.1 Bezier eğrileri 62
3.2.7.2 Sonlu yer değiştirme hesabı 63
3.2.7.3 Virtüel iş teoremi ve yönsel türev 66
3.2.7.4 Yaddoğrusal denklem takımını çözümü 68
3.2.7.5 Dönme sınır koşulunun denklem takımına etkisi 68
3.2.7.6 Sayısal uygulamalar 70
Doğru eksenli ankastre kiriş ........................................................................ 70
Eğri eksenli ankastre kiriş ............................................................................ 71
3.2.8 Malzeme yaddoğrusallığı .......................................................................... 72
3.2.8.1 Düzlem gerilme elemanı 73
3.2.8.2 Doğrusal olmayan bünye bağıntısı 75
3.2.8.3 Hesap algoritması 77
3.2.8.4 Akma yüzeyine taşınma 79
3.2.8.5 Elasto-plastik gerilmelerin hesaplanması 80
3.2.8.6 Örnek 80
4. BÜYÜK YER DEĞĠġTĠRME YAPAN ÇUBUK SĠSTEMLERĠN DĠNAMĠK
ANALĠZĠ ................................................................................................. 83 4.1 İntegrasyon Yönteminin Seçimi ....................................................................... 83
4.2 Dinamik Denge Denklemi ................................................................................ 83
4.3 Açık Dinamik Analiz ........................................................................................ 84
4.3.1 Doğrusal ivme kabulü ............................................................................... 84
4.3.2 Sabit ivme kabulü ...................................................................................... 85
4.4 Kapalı Dinamik Analiz ..................................................................................... 86
4.5 Kütle Matrisinin Elde Edilmesi ........................................................................ 88
4.6 Örnek Problemler ............................................................................................. 89
4.6.1 Örnek 1 ...................................................................................................... 89
4.6.2 Örnek 2 ...................................................................................................... 92
5. SONLU ELEMAN GELĠġTĠRME VE ANALĠZ ÇATISI (SEGAÇ) ............. 93 5.1 Genel Sonlu Eleman Altyapısı (FEMWORKS) ............................................... 96
5.1.1 Düğüm noktası nesnesi (Node) ................................................................. 97
5.1.2 Eleman nesnesi (Element) ......................................................................... 99
5.1.3 Sonlu eleman yapı sisteminin oluşturulması (Structure)......................... 103
5.1.4 Sistem denklem takımının oluşturulması (FEMAssembler) ................... 104
5.1.5 Yaddoğrusal çözücü (Solver) .................................................................. 105
5.2 Yeni Bir Sonlu Eleman Yaratma ve Çözümleme Dili (FEMLANG) ............. 106
5.2.1 Programlama dilinin yapısı ..................................................................... 108
5.2.2 Örnek kafes sistem düğüm noktasının tanımlanması .............................. 108
5.2.3 Örnek kafes elemanın tanımlanması ....................................................... 110
5.2.4 Kafes sistemin yaratılması ...................................................................... 112
5.2.5 Çözücü nesnesinin yaratılması (Solver) .................................................. 114
5.2.6 Sistemin çözümü ve sonuçların görüntülenmesi (Run)........................... 114
5.3 FEMBIND Hakkında ...................................................................................... 115
6. SONUÇLAR ....................................................................................................... 117
KAYNAKLAR ........................................................................................................ 119
EKLER....................................................................................................................123

ix
KISALTMALAR
SEY : Sonlu Elemanlar Yöntemi
NYP : Nesne Yönelimli Programlama
SEGAÇ : Sonlu Eleman Geliştirme ve Analiz Çatısı
PK : Piola-Kirchhoff
LG : Lagrange-Green

x

xi
ÇĠZELGE LĠSTESĠ
Sayfa
Çizelge 3.1 : Eğri eksenli kiriş ............................................................................... 72
Çizelge A.3.1 : Bezier eğrileri ile konsol kiriş problemi..........................................129

xii

xiii
ġEKĠL LĠSTESĠ
Sayfa
ġekil 1.1 : SEGAÇ temel bileşenleri ........................................................................... 3
ġekil 2.1 : Başlangıç ve güncel konumlarda diferansiyel doğru parçaları .................. 5
ġekil 2.2 : Yer değiştirme vektörü ............................................................................... 9
ġekil 2.3 : Güncel konumda açı değişimi .................................................................. 11
ġekil 3.1 : Kafes eleman uç kuvvetleri ve normal kuvvet ......................................... 25
ġekil 3.2 : Normal kuvvet çubuğunun sürekli ortam modeli ..................................... 28
ġekil 3.3 : İki boyutta normal kuvvet çubuğu............................................................ 29
ġekil 3.4 : Uzama ve rijit dönme-öteleme yapan bir çubukta kayma şekil
değiştirmeleri ............................................................................................ 31
ġekil 3.5 : Uzama ve rijit dönme-öteleme yapan bir çubukta asal şekil değiştirme .. 32
ġekil 3.6 : İki çubuklu normal kuvvet sistemi ........................................................... 39
ġekil 3.7 : Örnek 1 e ait çeşitli şekil değiştirme ölçüleri için kuvvet-yer değiştirme
grafikleri ................................................................................................... 40
ġekil 3.8 : İki boyutlu kafes sistem ............................................................................ 41
ġekil 3.9 : n6 düğüm noktasının düşey yer değiştirme-kuvvet grafiği ...................... 41
ġekil 3.10 : Stabilite kaybı öncesi kafes sistem yerdeğiştirmesi (A noktası) ............ 42
ġekil 3.11 : Stabilite kaybı sonrası kafes sistem yerdeğiştirmesi (B noktası) ........... 42
ġekil 3.12 : Dönmüş lokal eksen takımında elemanın merkezsel ekseni .................. 43
ġekil 3.13 : Merkezsel eksenin vektörel ifadesi ........................................................ 44
ġekil 3.14 : Eleman kesit koordinat vektörü .............................................................. 46
ġekil 3.15 : Referans sistemde merkezsel eksenin vektörel ifadesi........................... 47
ġekil 3.16 : Eleman uç kuvvetleri ve kesit tesirleri ................................................... 49
ġekil 3.17 : Eleman moment dengesi ........................................................................ 50
ġekil 3.18 : Elemanın açısal bilinmeyenleri .............................................................. 52
ġekil 3.19 : Konsol kiriş örneği ................................................................................. 54
ġekil 3.20 : Konsol kiriş statik analizi : ANSYS, Sap2000 ve MyBeam .................. 54
ġekil 3.21 : Çerçeve statik analizi.............................................................................. 55
ġekil 3.22 : Çerçeve sistem yük-deplasman grafiği (C noktası düşey) ..................... 55
ġekil 3.23 : Çerçeve sistemin eğilme çizimleri ......................................................... 56
ġekil 3.24 : Değişik eleman sayıları için yük-deplasman grafikleri .......................... 56
ġekil 3.25 : Değişik eleman sayıları için yük-deplasman grafikleri .......................... 57
ġekil 3.26 : Şekil değiştirmiş elemana ait diferansiyel parçada kesit tesirleri........... 58
ġekil 3.27 : Konsol kiriş hareketli burkulma örneği .................................................. 59
ġekil 3.28 : Konsol kiriş düşey uç deplasman grafiği (stabil durum) ........................ 60
ġekil 3.29 : Konsol kiriş düşey uç deplasman grafiği (burkulma durumu) ............... 60
ġekil 3.30 : Konsol kiriş kritik hareketli burkulma yükü – eleman saysı grafiği ...... 61
ġekil 3.31 : Üçüncü mertebe Bezier eğrisi ve dört kontrol noktası ........................... 62
ġekil 3.32 : Üçüncü mertebe Bernstein polinomları .................................................. 63
ġekil 3.33 : Yer değiştirmiş konum ve referans konum ............................................ 64
ġekil 3.34 : Koordinat parametreleri ......................................................................... 66
ġekil 3.35 : Kontrol noktaları ve uç kuvvetler ........................................................... 66

xiv
ġekil 3.36 : Bezier eğrisi ve kontrol noktaları ........................................................... 69
ġekil 3.37 : Yer değiştirmiş ve referans konumlara ait Bezier eğrileri ...................... 69
ġekil 3.38 : Ankastre mesnetli doğru eksenli kiriş .................................................... 70
ġekil 3.39 : Örnek program çıktısı ............................................................................. 70
ġekil 3.40 : PL2/EI = 2, 10 ve 15 için yer değiştirmiş konumlar ............................... 71
ġekil 3.41 : Konsol kiriş statik analizi Sap2000 ile karşılaştırma ............................. 71
ġekil 3.42 : Ankastre mesnetli eğri eksenli kiriş........................................................ 72
ġekil 3.43 : Bir nolu düğüm noktasında yer değiştirme alanları................................ 73
ġekil 3.44 : Gerilmenin akma yüzeyine taşınması ve elasto plastik gerilmelerin
hesaplanması ............................................................................................ 79
ġekil 3.45 : Akma fonksiyonun ya bağlı noktasal değerleri ................................ 79
ġekil 3.46: Konsol kiriş boyutlar ve yükleme ............................................................ 81
ġekil 3.47: P = 3.3 kN değeri için 10 kat büyütülmüş yer değiştirmeler ve
plastikleşme bölgesi ................................................................................. 81
ġekil 3.48: Çevrimsel yükleme davranışı (konsol serbest uç yer değiştirmesi esas
alınmıştır) ................................................................................................. 82
ġekil 4.1 : Konsol kiriş örneği ................................................................................... 89
ġekil 4.2 : Konsol kiriş ani yükleme .......................................................................... 90
ġekil 4.3 : Düşey yer değiştirme –zaman grafiği (açık şema / 1 eleman / yayılı kütle)
.................................................................................................................. 90
ġekil 4.4 : Değişen eleman sayıları için dinamik davranış grafikleri (MyBeam) ...... 91
ġekil 4.5 : Değişen eleman sayıları için dinamik davranış grafikleri (Sap2000)....... 91
ġekil 4.6 : Serbest çerçeve dinamik analizi ............................................................... 92
ġekil 4.7 : Serbest çerçeve anlık yükleme ................................................................. 92
ġekil 5.1 : SEGAÇ temel bileşenleri ......................................................................... 94
ġekil 5.2 : Düğüm noktası nesnesi ve örnek kod yapısı ............................................ 94
ġekil 5.3 : Nesne yapısı .............................................................................................. 95
ġekil 5.4 : SEGAÇ‘ ın çalışma şekli .......................................................................... 96
ġekil 5.5: Düğüm noktalarında tanımlanan yapılar ................................................... 98
ġekil 5.6 : Düğüm noktası nesnesi yapısı .................................................................. 99
ġekil 5.7 : Eleman nesnesi ....................................................................................... 102
ġekil 5.8 : Structure nesnesi ..................................................................................... 104
ġekil 5.9 : FEMAssembler nesnesi .......................................................................... 105
ġekil 5.10 : Solver nesnesi ....................................................................................... 106
ġekil 5.11 : İki boyutlu kafes nesnesi ...................................................................... 107
ġekil 5.12 : İki boyutlu kafes düğüm noktası nesnesi .............................................. 108
ġekil 5.13 : İki boyutlu kafes eleman nesnesi .......................................................... 110
ġekil 5.14 : İki boyutlu kafes sistem ........................................................................ 112
ġekil 5.15 : İki boyutlu kafes sistemin yaratılması .................................................. 112
ġekil 5.16 : Çözücü parametrelerinin ayarlanması .................................................. 114
ġekil 5.17 : Analiz ve çıktıların görüntülenmesi ..................................................... 114
ġekil A.1 : Düşey Yerdeğiştirme (L=1000 , P = 0.1) .............................................. 124
ġekil A.2 : Düşey Yerdeğiştirme (L=1000 , P = 0.2) .............................................. 124
ġekil A.3 : Düşey Yerdeğiştirme (L=1000 , P = 0.4) .............................................. 125
ġekil A.4 : Düşey Yerdeğiştirme (L=1000 , P = 1.0) .............................................. 125
ġekil A.5 : Mesnet Momenti (P = 1.0) .................................................................... 126

xv
SEMBOL LĠSTESĠ
F : Deformasyon gradyanı
x : Şekil değiştirmiş konum vektörü 0x : Referans konum vektörü
J : Jacobien matrisi
H : Yer değiştirme gradyanı Ε : Şekil değiştirme tansörü (Langrange-Green)
ζ : Cauchy gerilme tansörü
P : Birinci Piola-Kirchoff gerilme tansörü
S : İkinci Piola-Kirchoff gerilme tansörü
k : İç yük vektörü
q, r : Dış yük vektörleri
K : Teğet rijitlik matrisi GK : Geometrik rijitlik matrisi
C : Elastisite matrisi
pC : Plastisite matrisi
x, d, u : Bilinmeyenler vektörleri
T : Dönüşüm matrisi
M : Kütle matrisi
: Çubuk diferansiyel boyu
: Çubuk boyu
L : Çubuk düğüm noktaları arası mesafe
A : Çubuk kesit alanı
mv : Elastik eğri
: Birim boy kütlesi
EI : Eğilme rijitliği EA : Normal kuvvet rijitliği
v : Poisson oranı
( )Tr A : A Matrisinin izi
a : a Vektörünün boyu

xvi

xvii
NESNESEL PROGRAMLAMA YÖNTEMLERĠ ĠLE YAPI SĠSTEMLERĠNĠN
DOĞRUSAL OLMAYAN ANALĠZĠ
ÖZET
Sonlu Elemanlar Yöntemi yapı sistemlerinin modellenmesinde yaygın ve başarılı bir
biçimde kullanılmaktadır. Gelişen ihtiyaçlar dahilinde bir çok problemin çözümünde
hız ve doğruluk büyük önem kazanmıştır. Sonlu eleman geliştiricileri için hem
zaman hem de maliyet açısından en büyük zorluklardan biri, eleman geliştirme
sürecinde yapılan teorik hesaplamaları test etmek üzere elemanı ve bu elemanlardan
oluşan sistemi programlamaktır. Tez kapsamında doğrusal olmayan sistemlerin
hesabı için kullanılmak üzere tasarlanan ―Sonlu Eleman Geliştirme ve Analiz Çatısı‖
(SEGAÇ) adında yeni bir programlama platformu geliştirilmiştir.
ŞEGAÇ, yeni sonlu eleman türetmek ve bu elemanlardan oluşan sistemlerin çözümü
için özel olarak tasarlanmış genişletilebilir araçlar içermektedir. SEGAÇ ın en
önemli bileşeni FEMLANG adı ile geliştirilmiş nesne yönelimli yeni bir
programlama dilidir. Öğrenmesi ve kullanımı oldukça kolay olan bu dil sayesinde
SEGAÇ içerisindeki tüm araçlara erişilebilmektedir. SEGAÇ ‗ın en büyük avantajı
eleman geliştirme ve problem çözme sürecini herhangi bir programlama
platformundan çok daha hızlı bir şekilde gerçekleştirme olanağı sunmasıdır.
SEGAÇ yaratılırken çubuk sistemlerin büyük yer değiştirme hesabına yönelik
uygulamalar üzerine yoğunlaşılmıştır. Bu yeni programlama ortamının sunduğu
avantajlardan faydalanılarak ―MyBeam‖ adlı yeni bir sonlu eleman geliştirilmiştir.
MyBeam, iki boyutlu çubuk sistemlerin büyük yerdeğiştirme kabulü ile elastik
çözümlemesini yüksek performanslı bir şekilde yapabilmektedir. Bu elemanın statik,
dinamik ve burkulma analizleri çeşitli örnek problemlerle test edilmiştir.
SEGAÇ ın gelişim süreci sürmektedir. Bu yüzden sonlu elemanlar yöntemi ile ilgili
daha pek çok konunun incelenerek platformun eksiklerinin ortaya konması ve
güncellenmesi gerekmektedir. Gelecekte çubuk sistemlerin dışında iki ve üç boyutlu
sistemlerin çözülmesi, malzeme yaddoğrusallığı için araçlar ve otomatik sistem
türetme ve çıktıları görüntülemek için çeşitli araçların SEGAÇ bünyesine katılarak
daha kullanışlı bir platform yaratılması hedeflenmektedir.

xviii

xix
NONLINEAR ANALYSIS OF STRUCTURAL SYSTEMS WITH OBJECT
ORIENTED PROGRAMMING TECHNIQUES
SUMMARY
The Finite Element Method is widely used for modeling of structural systems and
gained a great success. Within the evolving needs, speed and accuracy in the solution
of the problem has gained importance. One of the biggest challenges for finite
element developers are both time and cost of element development process,
especially to write a computer program to test the theoretical calculations for creation
of elements. In the context of this thesis, a new programming platform has been
designed and developed for the solution of nonlinear systems called "Finite Element
Development and Analysis Framework" (FEDAF).
FEDAF is composed of special, extensible tools to derive new finite elements for the
solution of structural systems. The most important component of FEDAF is the new
programming language developed in object oriented architecture called FEMLANG
This is a quite easy to learn and easy to use language accessing all the tools available
within FEDAF. FEDAF 's biggest advantage is, it offers a very quick way to perform
problem-solving process when compared with other programming platforms.
During the creation period of FEDAF, big deformation of elastic beams is considered
of importance as a good sample problem. With the benefits offered by this new
programming environment a new finite element called "MyBeam" has been
developed. MyBeam has the capability to perform two-dimensional elastic analysis
large displacements included with a very high performance compared with its
counterparts. Static, dynamic and buckling analysis have been included for testing
purposes.
Development process of FEDAF continues. Therefore, many other issues related to
the finite element method must be examined to complete the missing parts of
FEDAF. For the future development, two and three dimensional systems, material
nonlinearities, tools for atomatic mesh generation and other stuff is going to be
considered for a complete finite element framework.

xx

1
1. GĠRĠġ
1.1 Tezin Amacı
Bu tezde yapı sistemlerinin yaddoğrusal (doğrusal olmayan) analizlerini
gerçekleştirmek üzere Sonlu Elemanlar Yöntemlerini uygulayan modern
programlama araçları ve yüksek performanslı elemanlar geliştirilmiştir. Geliştirilen
araçlarla düzlem çerçeve sistemlerin ve kafes sistemlerin büyük yer değiştirmeleri
dikkate alınarak statik, dinamik ve burkulma hesapları yapılmıştır. Sayısal yöntem
olarak Sonlu Elemanlar Yöntemi (SEY) kullanılmıştır. Geliştirilen çubuk
elemanlarda:
Bilinmeyenler deplasman tipi seçilmiştir.
Şekil değiştirmelerin küçük, bünye bağıntılarının doğrusal olduğu
varsayılmıştır.
Eğilmede Bernoulli-Navier hipotezinin geçerli olduğu varsayılmış ve kayma
gerilmelerinden kaynaklanan etkiler göz ardı edilmiştir.
Ayrıca iki boyutlu düzlem gerilme elemanları için küçük yerdeğiştirme kabulü ile
plastik hesap incelenmiş ve dönme serbestliği bulunan bir düzlem gerilme elemanı
geliştirilmiştir.
Statik problemlerde oluşturulan yaddoğrusal denklem takımı Newton-Rapson
yöntemi ile sabit yük adımlaması uygulanarak çözülmüştür. Dinamik problemler
zaman tanım alanında sabit ivme ve değişken ivme kabullerine göre açık (explicit) ve
kapalı (implicit) ilerleme şemaları kullanılarak çözülmüştür. Burkulma problemi
yaddoğrusal burkulma ve doğrusal burkulma olarak iki ayrı başlıkta incelenmiştir.
Günümüz bilgisayar teknolojisindeki gelişmelerle doğru orantılı olarak yapı
sistemlerinin hesabında Sonlu Elemanlar Yönteminin kullanım alanı yaygınlaşmıştır.
Gerek doğrusal gerekse yaddoğrusal hesaplamalar için oldukça başarılı çözümler
sunan bir çok yazılım, uygulamacılar tarafından kullanılmaktadır. Bununla beraber
artan teknolojik ihtiyaçlar doğrultusunda yapılan modellemelerin karmaşıklığı ve
bilgisayarlara getirdiği yük sürekli artmaktadır. Artan bu ihtiyacı karşılamak üzere;

2
Bilgisayarların sürekli hızlanması ve kapasitelerinin artması
Denklem takımı çözüm yöntemlerinin geliştirilmesi ve paralelleştirilmesi
Az serbestlik derecesi ile yüksek çözüm doğruluğu sunan yeni elemanların
geliştirilmesi
gerekmektedir. Tez kapsamında geliştirilen MyBeam elemanı çubuk sistemlerin
büyük yer değiştirme hesabı için oldukça yüksek doğruluk sunmaktadır. Bu elemanla
yapılan hesaplamalar literaratürde sıklıkla rastlanan ve güvenilirlikleri bir çok
araştırmacı tarafından test edilmiş olan ANSYS ve SAP2000 programları ile
karşılaştırılmış ve oldukça başarılı sonuçlar elde edilmiştir.
Paket programlar kullanıcıya, uzman teorisyenler tarafından oluşturulmuş birçok
sonlu eleman modeli ve bu elemanlardan oluşan sistemleri oluşturmak, çözmek ve
çözümleri değerlendirmek için güçlü araçlar sunmaktadır. Bununla birlikte kendi
sonlu elemanını geliştirmek ve paket programa dahil etmek isteyen kullanıcılara
(teorisyen kullanıcı) yönelik yapıları sunmakta yetersiz kalmaktadırlar. Sonlu
Eleman geliştiricileri teorilerini test etmek üzere bir programlama dili öğrenerek,
kendi programlarını yazmak veya mevcut açık kaynak kodlarını çözümleyip
değiştirmek zorunda kalmaktadırlar. Her iki durumda da harcanacak emek ve zaman
oldukça dikkate değerdir.
Bu tez kapsamında Sonlu Eleman Geliştirme ve Analiz Çatısı (SEGAÇ) adı altında
bahsedilen yöntemler, işaret edilen bu probleme çözüm üretmek amacıyla
geliştirilmiştir. SEGAÇ genel anlamda, Sonlu Eleman geliştiricilerine yardımcı
olmak üzere Nesne Yönelimli Programlama (NYP) teknikleri kullanılarak yazılmış
gelişkin araçlardan oluşan bir paket olarak algılanabilir. Bu paket
Rutin matematik ve SEY işlemlerini yürüten temel programlar
(FEMWORKS)
Kullanıcı özel sonlu eleman yaratmak üzere geliştirilmiş yeni bir
programlama dili (FEMLANG)
Kullanıcı elemanları ve SEGAÇ yapısını birleştiren bir geliştirme ortamı
(FEMBIND)
şeklinde üç ana bileşen içermektedir (Şekil 1.1).

3
ġekil 1.1 : SEGAÇ temel bileşenleri.
Bu bağlamda sonlu elemanlar teorisine hem geliştirilen elemanlar ile hem de
kullanılan programlama teknikleri ve geliştirilen programlama dili ile katkı sağlaması
tezin temel amacıdır.
1.2 Literatür Özeti
Yaddoğrusal sonlu elemanlar problemleri ilk olarak doğrusal burkulma
hesaplamaları ile gündeme gelmiştir. Daha sonra büyük yer değiştirme hesaplamaları
için geometrik rijitlik matrisi kullanımı ve artımsal formülasyon teknikleri
geliştirilmiştir [1, 2]. Artımsal tenkniklerle yapılan hesaplamalarda hata birikiminin
fazla olması nedeni ile iteratif bir teknik olan Newton-Raphson yöntemleri Mallet,
Marshal, Oden ve diğer araştırmacılar tarafından uygulanmaya başlanmıştır [3-5].
Newton-Raphson yönteminde zaman içerisinde iterasyonun hızlandırılması amacıyla
modifiye edilmiş ve teğet rijitlik matrislerinin güncellenmesini denetleyen Modifiye
Newton-Raphson metotları Oden ve Zienkiewicz tarafından kullanılmıştır [6, 7].
Bir çok araştırmacı yaddoğrusal sonlu elemanlar üzerine sayısız makale ve kitaplar
yayımlamışlardır. Bunlardan bazıları çubuk teorileri üzerine yoğunlaşmış olup
diğerleri sürekli ortamlar için yaddoğrusal yöntemleri incelemiştir [8-20].
Sonlu elemanlar teorisi yapı sistemlerinin bilgisayarla analizini oldukça uygun hale
getirmektedir. Teorik çalışmaların yanında sonlu eleman programlama üzerine de
yoğunlaşan yine birçok araştırmacı mevcuttur [21-26].
FEMWORKS
Sonlu Eleman GeliĢtirme
ve
Analiz Çatısı
FEMLANG
FEMBINDER

4
Zaman içerisinde programlama tekniklerinin gelişmesi ile nesnesel programlama
yöntemleri sonlu eleman programcıları tarafından kullanılmaya başlanmıştır.
Nesnesel programlamanın doğal yapısının sonlu elemanlar teorisi ile son derece
uyumlu olması bu çalışmaları hızlandırmış ve bir çok değerli çalışma gündeme
gelmiştir [27-35].
Nesnesel programlama yöntemleri kullanılarak yazılmış bir çok açık ve kapalı kodlu
uygulama mevcuttur. Bunlar arasında KASKADE, FEMSTER, FER System,
SIFFEA, MEF, FrameView, MODIFY, OSW, MUIApp, FEMLIB, ALAMODE,
FEView, FELyX sayılabilir.
Yaddoğrusal problemlerin dinamik analizlerinin yapılabilmesi için doğrudan
integrasyon yöntemleri Wilson ve Newmark tarafından önerilmiş ve birçok
araştırmacı tarafından geliştirilmiştir [36-44].
1.3 Yol Haritası
Geometri bakımından büyük yerdeğiştirmlerin hesabı büyük ölçüde sürekli ortam
mekaniği kavramlarına dayanmaktadır. Bu bakımdan tezin başlangıcı, sürekli ortam
mekaniği kavramlarının özet tanıtımına ayrılmıştır. Tez kapsamında kullanılan veya
geliştirilen yaddoğrusal elemanların davranış modelini ortaya koyan sürekli ortam
mekaniği kavramları (deformasyon gradyanı, kullanılan şekil değiştirme ölçüleri
vb...) detaylı bir şeklide örneklerle açıklanmıştır. Bu açıklamalardaki temel hedef
sürekli ortam mekaniğindeki tıkız (kompakt) formülasyonları uygulamada açık
halleri ile göstererek tezden faydalanmak isteyen araştırmacılara ek bir görüş
sağlamaktır.
Yapılan sayısal hesaplamalarda kullanılan tekniklerin açıklanması tezin bütünlüğü
açısından gerekli görülmüştür. Statik, dinamik ve burkulma hesaplarında kullanılan
yöntemler detaylı şekilde açıklanmıştır.

5
2. GEOMETRĠK YADDOĞRUSAL HESAP
Yer değiştirmelerin büyük olduğu durumda çeşitli büyüklüklerin ifade edildiği
referans koordinat sistemi büyük önem kazanır. Hesaplar Maddesel (Lagrangian)
koordinat takımında yapılmıştır. Şekil 2.1 cismin başlangıç durumu ve güncel
durumunu göstermektedir. Başlangıç durumuna ait büyüklükler ―0‖ üst indisi ile
gösterilmiştir.
ġekil 2.1 : Başlangıç ve güncel konumlarda diferansiyel doğru parçaları.
Güncel durum üzerindeki herhangi bir p noktası maddesel koordinatlar cinsinden
(2.1) ile ifade edilir.
0( ) ( 1,2,3)i i i ix x i 0 0 0x x x x e x e (2.1)
p noktasına komşu q noktası dx diferansiyel vektörü yardımıyla tarif edilir.
Maddesel koordinatlar cinsinden dx vektörü (2.2) ile ifade edilir.
0
0
0
ii j
j
iij
j
xdx dx
x
d d
xF
x
0x F x (2.2)
0x
d 0x
dx x
1x 1e
2x 2e
3x 3e
0p 0q
p
q

6
Burada F matrisi deformasyon gradyanı adını alır. Deformasyon gradyanı başlangıç
durumundaki bir diferansiyel doğru parçasının güncel duruma geçişini
sağlamaktadır.
2.1 Deformasyon Gradyanının Hesaplanması
Herhangi bir deformasyon durumu için güncel koordinatlar, başlangıç
koordinatlarının fonksiyonu şeklinde verildiği durumda deformasyon gradyanı
kolaylıkla hesaplanabilir. Fakat genellikle sonlu elemanlar formülasyonunda durum
böyle değildir. Formülasyonda sadece elemanın başlangıç ve güncel durumuna ait
düğüm noktası (nod) koordinatları mevcuttur. Uygun yaklaşım fonksiyonları
kullanarak başlangıç ve güncel durum koordinatları, nodal koordinatlar cinsinden
(2.3) deki gibi ifade edilebilir.
0 0( ) ( )
( ) ( ) ( , 1,2,3) ( 1,2,..., NS) NS:
i j k j ik
i j k j ik
x N x
x N x i j k Nod Sayısı
(2.3)
Burada ―ikx ‖ k numaralı nodun
ix koordinatını temsil etmektedir. Başlangıç
koordinatlarında diferansiyel doğru parçası;
00 ii j
j
xdx d d d
0 0x J ξ (2.4)
Güncel koordinatlarda diferansiyel doğru parçası;
ii j
j
xdx d d d
x J ξ (2.5)
şeklinde tanımlanır. (2.4) denklemi (2.2) de yerine yazılarak (2.6) elde edilir.
d d 0x FJ ξ (2.6)
(2.6) ile (2.5) karşılaştırıldığında (2.7) eşitliği bulunur.
0FJ J (2.7)
(2.7) eşitliğinin her iki tarafı sağdan 0J matrisinin tersiyle çarpılarak deformasyon
gradyanı

7
1[ ] 0F J J (2.8)
şeklinde hesaplanır.
2.2 Diferansiyel Hacim ve Alan Bağıntıları
Bir A matrisinin determinantı ijke permütasyon sembolü olmak üzere indis
notasyonu kullanılarak (2.9) ile hesaplanır.
1det( ) det( )
6ijk lmn li mj nk lmn ijk li mj nke e A A A e e A A A A A (2.9)
Aynı zamanda a ve b ile gösterilen iki vektörün vektörel ve skaler çarpımları indis
notasyonuyla (2.10) ile hesaplanır.
.
i ijk j k
i j ij
c e a b
d d a b
c a b
a b (2.10)
Başlangıç ve güncel durumda diferansiyel hacimler
0
1 2 3
1 2 3
( ).
( ).
dV d d d
dV d d d
0 0 0x x x
x x x (2.11)
şeklinde üç farklı doğrultuda seçilen diferansiyel doğru parçaları cinsinden (2.11) ile
ifade edilir. (2.11) ifadeleri (2.10) da belirlenen şekilde indis notasyonuyla yazılırsa
0 0 0 0
1 2 3ijk j k m imdV e dx dx dx (2.12a)
1 2 3ijk j k m imdV e dx dx dx (2.12b)
eşitlikleri elde edilir. Başlangıç ve güncel diferansiyel hacimleri arasındaki bağıntıyı
bulmak için (2.2) bağıntısından faydalanarak diferansiyel doğru parçaları arasında
(2.13) bağıntıları yazılabilir.
0
1 1
0
2 2
0
3 3
j js s
k kt t
m mn n
dx F dx
dx F dx
dx F dx
(2.13)
Bu bağıntılar (2.12b) de yerlerine yazılırsa

8
0 0 0
1 2 3ijk js kt mn s t n imdV e F F F dx dx dx (2.14)
elde edilir. (2.14) eşitliğinin indisleri düzenlenirse
0 0 0
3 1 2ijk in js kt n s tdV e F F F dx dx dx (2.15)
olduğu kolaylıkla görülebilir. (2.9) bağıntıları göz önüne alındığında
0 0 0
3 1 2det( )nst n s tdV e dx dx dx TF (2.16)
ve son olarak (2.12a) eşitliği indisleri değiştirerek (2.16) da yerine yazıldığında
0det( )dV dV TF (2.17)
sonucuna ulaşılmış olur.
Başlangıç ve güncel duruma ait diferansiyel alanlara ilişkin bağıntıyı elde etmek
üzere diferansiyel alanlar (2.18) deki gibi tarif edilirse
0
1 2
1 2
dA d d
dA d d
0 0x x
x x (2.18)
diferansiyel hacimler (2.19) şeklinde ifade edilirler.
0 0
3
3
dV dA d
dV dA d
0 0n x
n x (2.19)
n vektörü diferansiyel alanlara dik birim vektörleri göstermekte olup (2.20)
bağıntıları ile tanımlanmışlardır.
1 2
1 2
1 2
1 2
d d
d d
d d
d d
0 00
0 0
x xn
x x
x xn
x x
(2.20)
(2.19) bağıntıları (2.17) de yerlerine yazılarak
0
3 3det( ) ( )dA d dA d T T 0 T 0n x F n x (2.21)
eşitliği elde edilmiş olur. (2.2) bağıntısı (2.21) de kullanılır ve gerekli düzenlemeler
yapılırsa

9
0
3 3
0
3 3
0
( ) det( ) ( )
( ) det( ) ( )
det( )
dA d dA d
dA d dA d
dA dA
T 0 T 0 T 0
T 0 T 0 T 0
T T 0
n F x F n x
F n x F n x
F n F n
(2.22a)
Eşitliği elde edilir. (2.22a) nın her iki tarafı soldan 1[ ]TF ile çarpılarak düzenlenirse
1 0det( )[ ]dA dA T T 0n F F n (2.22b)
sonucuna ulaşılır.
2.3 Green-Lagrange Genleme Tansörü
2.3.1 Birim boy değiĢimleri
Başlangıç ve güncel koordinatlar Şekil 2.2 deki gibi göz önüne alındığında 0p
noktasının p ye hareketi u yer değiştirme vektörüyle gösterilebilir.
ġekil 2.2 : Yer değiştirme vektörü.
Yer değiştirme vektörü (2.23) şeklinde tanımlanır.
0u x x (2.23)
0p a komşu 0q noktasının yer değiştirmesi
( ) ( )d d d d d d 0 0 0u u x x x x u x x (2.24)
olduğu görülmektedir. (2.2) ifadesi (2.24) de kullanılırsa
( )d d d d d 0 0 0u F x x u F I x (2.25)
0x
d 0x
dx
du u
1x 1e
2x 2e
3x 3e
0p
0q
p
q
u
x

10
ifadesi elde edilir. Burada I 3 3 lük birim matristir. Yer değiştirme vektörünün tam
diferansiyeli başlangıç koordinatları türünden
0
i ij jdu H dx d d 0u H x (2.26)
şeklinde yazılabilir. Burada H matrisi yer değiştirme gradyanı adını alır. (2.25) ile
(2.26) ifadeleri karşılaştırıldığında
H F I F H I (2.27)
olduğu görülmektedir.
Keyfi bir d 0x doğrultusundaki genleme (birim boy değiştirme) (2.28) ile
tanımlanabilir.
1d
d dd d
d d d
0
0
x 0 0 0
x xu x
x x x (2.28)
(2.28) ifadesindeki sabit terim ―1‖ sol tarafa geçirilip eşitliğin her iki tarafının
kareleri alındığında
2( 1)d
d d
d d 0x 0 0
x x
x x (2.29)
olduğu görülür. (2.29) da soldaki terim açık yazılarak
2( ) 2 1d d
d d
d d 0 0x x 0 0
x x
x x (2.30)
(2.30) eşitliğinin solundaki terimler incelendiğinde boy değiştirmenin karesinin 1 in
yanında çok küçük olduğu durumda eşitlik aşağıdaki gibi yeniden düzenlenirse
2 1( ) 0 2 1
2d d d
d d d dd d
d d d d
0 0 0
0 0
x x x0 0 0 0
x x x xx x
x x x x (2.31)
şeklinde bulunur. Burada d
0x ifadesi d 0
x yönündeki Lagrange-Green genlemesi
olarak bilinir. (2.31) vektörel formda yazılırsa
2 2
2
1 ( ) ( )
2 ( )d
d d
d
0
0
0x
x x
x (2.32)

11
elde edilir. (2.32) indis notasyonunda
0 2
0 2
( )1( 1,2,3)
2 ( )
j k jk
d
dx dx dxk
dx
0
i
i i i
xi
(2.33)
(2.31) de i indisi seçilen genleme doğrultusunu göstermektedir. (2.2) bağıntısı
(2.33) de kullanıldığında
0 0 0 2
0 2
( )1
2 ( )
j k jk
d
F dx F dx dx
dx
0
i
i i i i i
xi
(2.34)
(2.34) düzenlenerek sadeleştirilirse
1( 1) ( 1,2,3)
2
T
k kdF F k 0
ii ix
(2.35)
ifadesine ulaşılmış olur.
2.3.2 Açı değiĢimleri
Küçük genleme durumunda başlangıçta birbirine dik iki diferansiyel doğru parçası
arasındaki açı değişimini ifade etmek üzere Şekil 2.3 den
ġekil 2.3 : Güncel konumda açı değişimi.
sin( ) sin( ) cos( )2
a b a b c c
ij (2.36)
şeklinde yazılabilir. (2.36) ifadesi güncel durumdaki diferansiyel doğru parçaları
cinsinden
cos( )dd
cd d
ji
i j
xx
x x (2.37)
skaler çarpımıyla ifade edilebilir. (2.37) de paydadaki ifadeler (2.28) eşitliğinden
d 0
ix
d 0
jx
d ix
d jx
a
b
c

12
(1 )
(1 )
d
d
d d
d d
0i
0j
0
i ix
0
j jx
x x
x x (2.38)
şeklinde hesaplanabilir. (2.38) ve (2.2) ifadeleri (2.37) de yerlerine yazılır ve indis
notasyonu kullanılırsa
0 0
cos( )(1 )(1 ) (1 )(1 )
k s ks k k
d d d d
d d F F dx dxc
d d d d
0 0 0 0i j i j
i j i j i j
0 0 0 0
i j i jx x x x
x x
x x x x (2.39)
elde edilir. Açı ve boy değişimlerinin küçük olduğu göz önünde bulundurulursa
, 1 T
k kd dF F 0 0
i jij i jx x
(2.40)
bağıntısı elde edilmiş olur. Nihayet Green-Lagrange genleme tansörü (2.35) ve (2.40)
bağıntıları göz önüne alındığında
1( )
2 T
Ε F F I (2.41)
şeklinde tanımlanır ve bu durumda genleme ve açı değiştirme bileşenleri (2.41) in
elemanları cinsinden
( 1,2,3) ( , 1,2,3 )ii d ii ij ij jie i ve i j i j ix
(2.42)
şeklinde gösterilebilir. (2.27) ifadesi (2.41) de kullanılarak
1 1
( ) ( )2 2
T T TΕ H I H I I H H H H (2.43)
genleme-yer değiştirme bağıntıları elde edilir. (2.43) de
1
2 T
H H (2.44)
terimi doğrusal olup
1
2
TH H (2.45)
terimi yaddoğrusal genleme-yer değiştirme ifadelerini temsil etmektedir.

13
2.4 Cauchy ve Piola-Kirchhoff Gerilme Tansörleri
Büyük yer değiştirme durumunda gerilmeyi tarif ederken cismin başlangıç ve güncel
durumu arasındaki farkı gözetmek gerekmektedir. Cismin güncel konumunda tarif
edilen gerilme bileşenleri (2.46) Cauchy gerilme tansörüyle gösterilir.
2 3
12 22 23
3 23 33
ζ (2.46)
Güncel konumda n normalli diferansiyel bir alana etkiyen kuvvet vektörü
d dA dA n nf t ζ n (2.47)
şeklinde ifade edilir. (2.47) de nt güncel konumdaki gerilme vektörüdür. (2.22)
ifadesi (2.47) de kullanılırsa
1 0det( ) [ ]dA dA T T
n 0t F ζ F n (2.48)
elde edilir. 0n vektörü başlangıç duruma ait diferansiyel alan normalidir. Başlangıç
ve güncel konumda gerilme vektörleri arasında
0
0 1
d dA dA d
dA dA
0 0
0
n n n n
n n
f t F t F f
t F t (2.49)
ilişkisi olduğu kabulüyle (2.48) ve (2.49) bağıntıları bir arada düşünüldüğünde
0 1 0det( ) [ ]dA dA 0
T T
n 0F t F ζ F n (2.50)
ifadesi bulunur. (2.49) ifadesi incelendiğinde başlangıç konumunda tarif edilen
kuvvet vektörünün de aynen sürekli ortamdaki herhangi bir diferansiyel doğru
parçası gibi deformasyon gradyanı ile güncel konumdaki kuvvet vektörüne
dönüştüğü kabulünün yapıldığı görülmektedir. Nihayet (2.50) bağıntısından birinci
Piola-Kirchhoff gerilme tansörü (2.50) eşitliğinden
1det( ) [ ] T TP F ζ F (2.51)

14
şeklinde tanımlanır. (2.51) tansörü simetrik yapıda değildir. Bu tansör deformasyon
gradyanının tersiyle çarpılarak simetrik yapılabilir. Bu işlem sonucunda oluşan
simetrik tansöre ikinci Piola-Kirchhoff gerilme tansörü adı verilir.
1 1 1det( ) [ ] T TS F P F F ζ F (2.52)
(2.52) tansörü (2.47) ile benzer olarak başlangıç konumda
0 0dA dA 0n 0t S n (2.53)
bağıntısını kurar. Piola-Kirchhoff gerilme tansörleri matematiksel dönüşümlerle elde
edilmiş büyüklüklerdir. Güncel konumdaki gerçek gerilme bileşenleri sadece Cauchy
tansörü ile ifade edilir. Piola-Kirchhoff gerilme tansörlerinden Cauchy gerilmelerine
geçiş aşağıdaki dönüşümlerle yapılabilir.
1
det( ) T
Tζ P F
F (2.54a)
1
det( ) T
Tζ F S F
F (2.54b)
2.5 Virtüel ĠĢ Denklemi
Büyük yer değiştirmeler söz konusu olduğunda başlangıç ve güncel durum
arasındaki fark önem kazanır. Kuvvetler etkisi altındaki cisim güncel konumda
dengede olmak durumundadır. (2.46) ile tanımlanan Cauchy gerilme tansörü
bileşenleri cinsinden güncel konumda denge denklemi
0 ( 1,2,3)ij
i
j
b ix
(2.55)
şeklindedir. Burada ib hacim kuvvetlerinin bileşenlerini temsil etmektedir. (2.55)
denklemleri sınır koşullarıyla uyumlu (kabul edilebilir), küçük ve keyfi (virtüel,
sanal) yer değiştirme alanları ile çarpılarak tüm hacim boyunca integre edilirse
( ) 0ij
i i i
jV
u b u dVx
(2.56)

15
eşitliğinin sağlanması cismin dengede olması durumunda mümkündür. Green-Gauss
teoremi kullanılarak (2.26) ifadesi
( ) 0iij j i ij i i
jS V
un u dS b u dV
x
(2.57)
şeklinde yazılabilir. Cisim sınırlarındaki dış kuvvet vektörü q ile gösterilirse
ij j in q (2.58)
olduğuna göre (2.57) nin son hali
ij ij i i i i
V S V
e dV q u dS b u dV (2.59)
olacaktır. Burada ije (2.26) ya benzer biçimde, güncel konumda tanımlanan virtüel
yer değiştirme gradyanının bileşenlerini temsil etmektedir. (2.59) da eşitliğin
solundaki terim iç kuvvetlerin virtüel işi, sağdaki terim ise dış kuvvetlerin virtüel
işidir. (2.60) tanımları yapılarak
11 22 33 12 12 21 23 23 32 13 13 31
22 33 2 23 13
{ , , , , , }
{ , , , , , }
e e e e e e e e e
T
T
e
ζ (2.60)
(2.59) denklemi vektörel formda
. . .V S V
dV dS dV T T T
e ζ u q u b (2.61)
yazılabilir. Yapılan hesaplarda hacim kuvvetlerinin sıfır olduğu kabul edilmiştir.
2.5.1 Virtüel iĢ denkleminin baĢlangıç konumunda ifade edilmesi
Virtüel iş denklemi güncel konumda geçerlidir. Fakat cismin güncel konumu
bilinmemektedir. Bu sebeple (2.61) denkleminin başlangıç konumunda ifade etmek
gerekecektir. İlk adımda yüzey kuvvetlerini içeren terim ele alınırsa
1 0 0det( )[ ]dS dS dS dS T T 0 0q ζ n ζ F F n P n (2.62)
şeklinde yazılabilir. (2.63) tanımı yapılarak
0dS 0 0q P n (2.63)
16
yüzey kuvvetleri
0
0
. .S S
dS dS T T 0
u q u q (2.64)
şeklinde başlangıç konumunda ifade edilmiş olur. (2.61) de virtüel iç iş terimi
tansörel formda
:iç
V
W dV e ζ (2.65)
şeklinde yazılabilir. ―:‖ sembolü (2.66) şeklinde tanımlanır.
: ( )Tr Te ζ e ζ (2.66)
(2.65) ifadesi başlangıç koordinatlarında (2.41) ve (2.53) ifadelerinden yararlanarak
0
0:iç
V
W dV E S (2.67)
şeklinde ifade edilebilir.
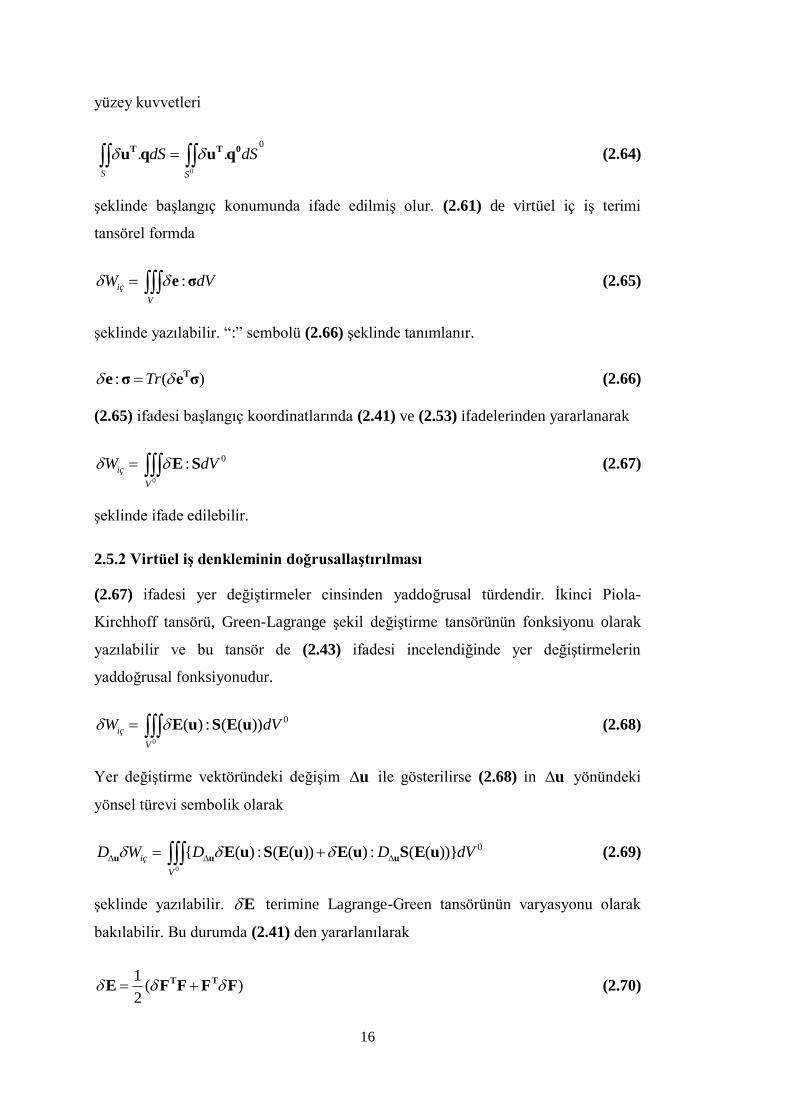
2.5.2 Virtüel iĢ denkleminin doğrusallaĢtırılması
(2.67) ifadesi yer değiştirmeler cinsinden yaddoğrusal türdendir. İkinci Piola-
Kirchhoff tansörü, Green-Lagrange şekil değiştirme tansörünün fonksiyonu olarak
yazılabilir ve bu tansör de (2.43) ifadesi incelendiğinde yer değiştirmelerin
yaddoğrusal fonksiyonudur.
0
0( ) : ( ( ))iç
V
W dV E u S E u (2.68)
Yer değiştirme vektöründeki değişim u ile gösterilirse (2.68) in u yönündeki
yönsel türevi sembolik olarak
0
0{ ( ) : ( ( )) ( ) : ( ( ))}iç
V
D W D D dV u u uE u S E u E u S E u (2.69)
şeklinde yazılabilir. E terimine Lagrange-Green tansörünün varyasyonu olarak
bakılabilir. Bu durumda (2.41) den yararlanılarak
1( )
2 T T
E F F F F (2.70)

17
şeklinde ifade edilebilir. (2.27) bağıntısından yararlanarak
F = H+I F H (2.71)
olduğu görülebilir. Nihayet (2.70) ifadesi yer değiştirme gradyanın fonksiyonu olarak
1( ( ) ( ) )
2 T T
E H H I H I H (2.72)
şeklinde belirlenir. (2.72) nin yönsel türevi
0
1( ( ) ( ) )
2 h
dD h h
dh
T T
u E H H H I H H I H (2.73)
şeklinde hesaplanarak
1( )
2D T T
u E H H H H (2.74)
ifadesine ulaşılmış olur. Burada
0
0
( )
( )
iij
j
iij
j
uH
x
uH
x
(2.75)
şeklinde tanımlıdır. İkinci Piola-Kirchhoff tansörünün yönsel türevi zincir kuralı ile
sembolik olarak
( ( )) : :D D D
u u u
SS E u E C E
E (2.76)
şeklinde ifade edilir. (2.76) daki sembolik kısmi türev ikinci Piola-Kirchhoff
tansörünün tüm elemanlarının Lagrange-Green tansörünün tüm elemanlarına göre
kısmi türevini ifade etmektedir. Bu türevler indis notasyonunda
ij
ijkl
kl
SC
(2.77)
şeklinde tanımlanabilir. Burada C dördüncü mertebeden bir tansördür ve Elastisite
Tansörü adını alır. (2.76) daki Lagrange-Green tansörünün yönsel türevi (2.43)
ifadesinden faydalanarak

18
0
1( ) ( ) ( ) ( )
2 h
dD h h h h
dh
T T
uE H H H H H H H H (2.78)
şeklinde alınarak düzenleme yapıldığında
1
2D T T
uE H F F H (2.79)
elde edilir. Hesaplanan yönsel türev ifadeleri (2.69) da yerlerine yazılarak virtüel iç
iş ifadesinin yönsel türevi
0
01 1 1{ ( ) : ( ) : : }2 2 2
iç
V
D W dV T T T T T T
u H H H H S H F F H C H F F H (2.80)
bulunur. (2.80) ifadesi düzenlenirse
0
0{ : : : }iç
V
D W dV T T
u H HS F H C F H (2.81)
sonucuna ulaşılır. Virtüel iş teoremi hatırlanacak olursa
iç dışW W (2.82)
ifadesinin yönsel türevi alarak
iç iç dış dışW D W W D W u u (2.83)
yazılabilir. Dış kuvvetlerin yer değiştirmelerden bağımsız olduğu kabulu ile
0dışD W u (2.84)
dış kuvvetlerin virtüel işinin yönsel türevi sıfır olur. Bu durumda yönetici ifade
iç dış içD W W W u (2.85)
olacaktır. (2.68) ve (2.81) bağıntıları (2.85) de yerlerine yazılarak
0 0
0 0{ : : : } :dış
V V
dV W dV T T
H HS F H C F H E S (2.86)
yönetici denklemine ulaşılır.

19
2.6 Sonlu Elemanlar Formülasyonu
(2.81) ifadesindeki tansörel işlemleri bilgisayarda hesaplayabilmek için ifadelerin
açılarak matris formda yazılması gerekmektedir. S için (2.87) tanımı yapılarak
11 12 13
21 22 23
31 32 33
11 12 13
21 22 23
31 32 33
11 12 13
21 22 23
31 32 33
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
S S S
S S S
S S S
S S S
S S S
S S S
S S S
S S S
S S S
S (2.87)
(2.86) da ikinci Piola-Kirchhoff tansörünü içeren terim
: TH HS H S H (2.88)
şeklinde yazılabilir. Burada yer değiştirme gradyanı tansörü vektörel formda
11 12 13 21 22 23 31 32 33{ , , , , , , , , }TH H H H H H H H HH (2.89)
şeklinde ifade edilmiştir. (2.81) de elastisite tansörünü içeren terimi hesaplamak
üzere
11 21 31
12 22 32
13 23 33
12 11 22 21 32 31
13 12 23 22 33 32
13 11 23 21 33 31
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0
0 0 0
0 0 0
F F F
F F F
F F F
F F F F F F
F F F F F F
F F F F F F
F (2.90)
tanımı yapılarak (2.81) ifadesi matris formda
0
0{ }iç
V
D W dV T T T
u H S H H F CF H (2.91)
şeklinde yazılır. Yer değiştirme artımları uygun yaklaşım fonksiyonları ile ifade
edilebilir.

20
1
1
11 1 2 2
12 1 2 3
23 1 1
0 0 0 ...
0 0 0 ...
0 0 0 0 ...
d
u N N d
u N N d
u N d
Tu N d (2.92)
Burada j
id ifadesi j nolu düğüm noktasının i yönündeki yer değiştirme artımını
ifade etmektedir. yer değiştirme gradyanı vektörel formda
1 1 2
0 0 0
1 1 1
1 1 2
0 0 0
2 2 3
1 1 2
0 0
3 3
2
0
1
2
0
2
2
0
3
3
0
1
3
0
2
3
0
3
( )0 0 0 ...
( )0 0 0 ...
( )0 0
( )
( )
( )
( )
( )
( )
u N N
x x x
u N N
x x x
u N N
x x
u
x
u
x
u
x
u
x
u
x
u
x
0
3
1 2 1
0 0 1
1 1 1
2
1 2 10 0 32 2 2
11 2
0 0
3 3
1
0
1
1
0
2
1
0
3
0 ...
0 0 0 ...
0 0 0 ...
0 0 0 ...
0 0 0 0 ...
0 0 0 0 ...
0 0 0 0 ...
x
N Nd
x xd
N Nd
x xd
N N
x x
N
x
N
x
N
x
TH B d
(2.93)
şeklinde hesaplanabilir. yer değiştirme gradyanının varyasyonu
TH B d (2.94)
şeklinde alınarak (2.91) ifadesinde yerine yazılırsa
0
0{ }iç
V
D W dV T T T T
u d BSB BF CFB d (2.95)
halini alır. Hesaplamalarda basitlik olması için sistemde sadece nodal yüklerin
olduğu varsayılırsa (2.86) ifadesi

21
0 0
0 0{ }
V V
dV dV T T T T T T T
dıĢd BSB BF CFB d d r d BF S (2.96)
şeklinde yazılabilir. dıĢr dış kuvvet vektörünü temsil etmektedir. (2.96) da
11 22 33 12 23 13{ , , , , , }TS S S S S SS (2.97)
şeklinde tanımlanmıştır. (2.96) denklem takımı yer değiştirmeler türünden lineerdir.
Bu denklem takımı sembolik olarak
( ) S C dıĢ içK K d r r (2.98)
gösterilebilir. (2.98) de
0
0
0
1 1 1
0
1 2 3
1 1 1
1 1 1
0
1 2 3
1 1 1
1 1 1
0
1 2 3
1 1 1
det( )
det( )
det( )
V
V
V
dV drdr dr
dV drdr dr
dV drdr dr
T T
S
T T T T
C
T T
iç
K BSB BSB J
K BF CFB BF CFB J
r BF S BF S J
(2.99)
2.7. Sonlu Elemanlarda Newyon-Raphson Yöntemi
Büyük yer değiştirme teorisi ile oluşturulan (2.86) yönetici denklemi sonlu eleman
teknikleri kullanılarak seçilen nodal bilinmeyenler cinsinden (2.100) deki gibi
yazılabilir.
( ) EK d r (2.100)
Burada d nodal yer değiştirme vektörü, Er ise dış kuvvet vektörüdür. Newton-
Raphson yöntemi uyarınca nodal yer değiştirmelere id şeklinde bir başlangıç
çözümü önerilerek (2.101) ardışık yaklaşım şeması uyarınca adım adım çözüme
gidilir.
( ) ( ) i 1 i i i
T EK d K d K d r
( ) i i i
T EK d r K d
1 i i id d d (2.101)

22
Burada
( / ) i i
TK K d (2.102)
şeklinde tanımlanır. Elde edilen i 1d nodal büyüklükleri yaddoğrusal denklem
takımında yerlerine yazılarak
( ) i 1 i 1K d r (2.103)
elde edilen i 1r kuvvet vektörü Er dış kuvvet vektörüne belirli bir yakınsaklık ölçütü
uyarınca yakın olana kadar ardışık yaklaşıma devam edilir. Uygulanan yakınsaklık
ölçütü (2.104) de verilmiştir.
2
21
h
i 1
E
E
r r
r (2.104)
Çözülen problemlerde h toleransı 0.01 seçilmiştir. Er vektörünün normunun sıfıra
yakın olması durumunda sıfıra bölmeyi engellemek için paydaya 1 eklenmiştir.
2.7. Yaddoğrusal Hesap Uygulaması
Hesaplar aşağıdaki adımlar ardışık olarak tekrarlayarak yapılır.
1. Problemin sınır koşulları ile uyumlu bir id başlangıç yer değiştirme vektörü
seçilir. Hesaplarda başlangıç yer değiştirme vektörünün tüm bileşenleri sıfır
seçilmiştir.
2. Bu noktada elemanların başlangıç ve güncel konumları bilinmektedir. Her iki
konumda da Jacobian matrisleri bilindiğine göre F deformasyon gradyanı
(2.8) bağıntısından hesaplanabilir.
3. (2.41) bağıntısı kullanılarak Ε Lagrange-Green şekil değiştirme tansörü
hesaplanır.
4. Bünye bağıntıları kullanılarak ikinci Piola-Kirchhoff gerilme tansörü (S )
hesaplanır.
5. Bu aşamada (2.86) yönetici denkleminde yer alan tüm ifadeler bilinmektedir.
(2.100) denklem takımı oluşturularak id yer değiştirme vektörü hesaplanır.
6. i 1 i id d d ile yer değiştirme vektörü güncellenir.

23
7. Güncellenen yer değiştirme vektörü ( i 1d ), (2.103) bağıntısında yerine
yazıldığında i 1
içr vektörü, (2), (3) ve (4) nolu adımlarda belirtilen işlemler
yapılarak hesaplanır.
8. h küçük bir sabit sayı olmak üzere (2.104) yakınsama kriteri sağlanıyorsa
hesap durdurulur. Aksi takdirde (5) nolu adıma dönülerek ardışık hesaba
devam edilir.

24

25
3. ÇUBUK SĠSTEMLER ĠÇĠN BÜYÜK YER DEĞĠġTĠRME HESABI
3.1 Sadece Normal Kuvvet TaĢıyan Sistemler
3.1.1 ġekil değiĢtirme ölçüsünün seçimi
Bir kafes sistem çubuğunun şekil değiştirmeden önceki ve sonraki durumu Şekil 3.1
de verilmektedir.
ġekil 3.1 : Kafes eleman uç kuvvetleri ve normal kuvvet.
Şekil 3.1 dikkate alındığında (3.1) eşitlikleri kolaylıkla yazılabilir
0 0 2 1
0 0 2 1
( ) ( )
( ) ( )
L Cos u u LCos
L Sin w w LSin
(3.1)
Yukarıdaki eşitliklerin kareleri alınıp alt alta toplanarak şekil değiştirmiş konumdaki
çubuk boyu
2 2 2
0 0 2 1 0 0 2 1[ ( ) ] [ ( ) ]L L Cos u u L Sin w w (3.2)
elde edilir. (3.2) de eşitliğin her iki tarafının varyasyonu alınarak
0 0 2 1 2 1 0 0 2 1 2 1
1 1[ ( ) ]( ) [ ( ) ]( )L L Cos u u u u L Sin w w w w
L L (3.3)
şekil değiştirmiş boyun varyasyonu bulunabilir. (3.1) eşitlikleri (3.3) de yerlerine
yazıldığında
2Q
2P
1Q
1P N N
0
1u
1w
2u
2w
L
2Q
2P
1Q
1P
0L

26
2 1 2 1( )( ) ( )( )L Cos u u Sin w w (3.4)
olduğu görülecektir. Virtüel İş İlkesini uygulayabilmek için uygun bir şekil
değiştirme ölçüsü kullanmak gerekmektedir. Büyük şekil değiştirme durumu için
şekil değiştirme ölçüsü logaritmik genleme olarak alınırsa
log
L
L
(3.5)
olacaktır. Normal kuvvet çubuğunda çubuk üzerinde yükleme olmaması durumunda
Virtüel İş Denklemi şekil değiştirmiş ve değiştirmemiş sistemde alternatif olarak
1 1 2 2 1 1 2 2
0 1 1 2 2 1 1 2 2
dV Q u Q u P w P w
dV Q u Q u P w P w
(3.6a b)
şeklinde yazılabilir. Hangi denklemin kullanılacağı seçilecek virtüel şekil değiştirme
ölçüsüne bağlıdır. (3.6) denkleminin sağ tarafındaki uç kuvvetler Şekil 3.1
gösterildiği gibidir. Şekil değiştirmiş çubukta normal kuvvet Şekil 3.1 den;
1 1
2 2
( ) ( )
( ) ( )
N QCos PSin
N Q Cos P Sin
(3.7)
şeklinde yazılabilir. Aynı zamanda (3.7) eşitlikleri çubuğun denge denklemlerine de
karşı gelmektedir. Şekil değiştirme ölçüsü olarak logaritmik genleme (3.6a) da
yerine yazılarak integral alınırsa
L L LdV dV Ads N ds N L
L L L
(3.8)
elde edilir. Burada gerilme tanım gereği Cauchy gerilmesi olmaktadır.
cauchy
N
A (3.9)
(3.4), (3.6) ve (3.8) kullanılarak virtüel iş denklemi
2 1 2 1 1 1 2 2 1 1 2 2( )( ) ( )( )NCos u u NSin w w Q u Q u P w P w (3.10)
şekline dönüşmektedir. (3.10) eşitliği aşağıdaki denklem takımına karşı gelmektedir.

27
1
2
1
2
( )
( )
( )
( )
NCos Q
NCos Q
NSin P
NSin P
(3.11)
(3.11) denklem talkımı (3.7) denge denklemlerini otomatik olarak sağlamakla birlikte
uç kuvvetlerin her birinin ayrı ayrı ifadesini vermektedir. Bu noktadan itibaren
normal kuvvet, yer değiştirmeler türünden yazılarak yaddoğrusal eleman denklemi
elde edilebilir. Bunun için bünye bağıntıları ve şekil değiştirme ölçüsü gerekecektir.
Dikkat edilirse (3.11) denklem takımı seçilen virtüel şekil değiştirme ölçüsü ve
integralin alındığı bölgeden bağımsız olarak geçerlidir. Bunu göstermek üzere şekil
değiştirme ölçüsünü Biot genlemesi olarak seçelim. Tanım gereği;
0
0
biot
L L
L
(3.12)
olacaktır. Bu durumda (3.12) nin varyasyonu alındığında
0
L
L
(3.13)
olacaktır. (3.13) ifadesi (3.6b) de yerine yazılarak integral alınırsa;
0 0 0 0
0 0
L LdV A ds N ds N L
L L
(3.14)
olacaktır. (3.14) de gerilme tanım gereği Kirchhoff gerilmesi olmaktadır.
0
kirchhoff
N
A (3.15)
Yine farklı bir uygulama olarak Lagrange-Green genleme ifadesini kullanılabilir.
2 2
0
2
0
1
2LG
L L
L
(3.16)
(3.16) nın varyasyonu;
2
0
LG
L L
L
(3.17)
olacaktır. (3.17) ifadesi (3.6b) de yerine yazılarak integral alınırsa;

28
0 0 0 0 02 2
0 0
L L L LdV A ds A ds N L
L L
(3.18)
şeklinde yazılabilir. (3.18) de gerilme tanım gereği 2.Piola-Kirchhoff gerilmesi
olmaktadır.
02
0 0 0/PK
LN N
A L A L L (3.19)
Görüldüğü üzere kullanılan virtüel şekil değiştirme ölçüsü ve integral bölgesinin
seçimi problemde kullanılan gerilme türünü belirlemektedir. Bu aşamadan itibaren
problemin çözümü için ilgili gerilme-şekil değiştirme tipine uygun bünye
bağıntılarının belirlenmesi gerekecektir.
3.1.2 Sürekli ortam formülasyonu (sabit alan)
Çubuk modelleri, sürekli ortam modellerine çeşitli kinematik ve enerji bazlı
kısıtlamalar getirilerek oluşturulur. Bu bölümde normal kuvvet çubuğuna ilişkin
sürekli ortam modeli oluşturularak literatürdeki çeşitli kavramlar bu model üzerinden
açıklanacaktır. Çubuk ortamını tanımlamak için ilk önce konum vektörleri
tanımlanmalıdır. Hesaplar şekil değiştirmiş çubuk üzerinde gösterilecektir
(Şekil 3.2).
ġekil 3.2 : Normal kuvvet çubuğunun sürekli ortam modeli.
Çubuk merkez ekseni
(1 ) (0 1)r r r m i jx x x (3.20)
1n 3n
2n
y
mx z
x

29
şeklinde yazılabilir. Burada ix ve
jx çubuk uç noktalarının koordinat vektörleridir.
Çubuk üzerindeki herhangi bir noktanın koordinatı Şekil 3.2 de gösterilen çubuk
lokal ekseni yardımıyla
2 3r r m 2 3x x n n (3.21)
şeklinde yazılabilir.
Hesapları basitleştirmek üzere düzlem çubuk üzerinde işlemler yapılacaktır. Bu
nedenler lokal eksen takımı Şekil 3.3 de gösterildiği üzere
2
3
{ ( ), ( ),0}
{ ( ), ( ),0}
{0,0,1}
Cos Sin
Sin Cos
T
1
T
T
n
n
n
(3.22)
şeklinde seçilmiştir.
ġekil 3.3 : İki boyutta normal kuvvet çubuğu.
Konum vektörünün tam diferansiyeli
2 3dr dr drr
m2 3
xdx n n (3.23)
şeklinde ifade edilebilir. Gerekli sadeleştirmeler yapıldığında matris formda
2
3
( ) ( ) 0
( ) ( ) 0 .
0 0 1
LCos Sin dr
LSin Cos dr
dr
dx J dr (3.24)
yazılabilir. Burada L şekil değiştirmiş çubuk boyudur. Benzer hesaplamalar şekil
değiştirmemiş çubuk için yapıldığında
1n
ix jx mx
x
y
2n

30
0 0 0
0 0 0 2
3
( ) ( ) 0
( ) ( ) 0 .
0 0 1
L Cos Sin dr
L Sin Cos dr
dr
0 0dx J dr (3.25)
sonucu elde edilir. Yukarıdaki sonuçlar elde edilirken 2r ve
3r doğrultularında şekil
değiştirmenin olmadığı var sayılmıştır. Bu durum çubuk kesit alanının sabit
kalmasına karşı gelmektedir. İlerleyen bölümlerde hacmin sabit kalması durumu da
ayrıca incelenecektir. Deformasyon gradyanı (3.24) ve (3.25) ifadeleri kullanılarak
1
.
. .( . )
.
0
0
0
dx F dx
J dr F J dr
F J J
(3.26)
şeklinde hesaplanabilir. İşlemler yapıldığında deformasyon gradyanı
0 00 0
0 0
0 00 0
0 0
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0
0 0 1
LCos Cos LCos SinSin Sin Sin Cos
L L
LSin Cos LSin SinCos Sin Cos Cos
L L
F (3.27)
şeklinde bulunur. (3.27) deformasyon gradyanının determinantı
0
det( )L
LF (3.28)
olarak bulunur. (3.28) deki sonuç çubuğun kesit alanının sabit kaldığını
göstermektedir. Deformasyon gradyanını kullanarak çeşitli şekil değiştirme
tansörlerini elde etmek mümkündür. Örneğin (3.27) yi kullanarak Lagrange-Green
şekil değiştirme tansörü hesaplanırsa
2 2 2 220 0
0 0 02 2
0 0
2 2 2 220 0
0 0 02 2
0 0
( ) ( ) ( ) 02 2
1( . ) ( ) ( ) ( ) 0
2 2 2
0 0 0
L L L LCos Sin Cos
L L
L L L LSin Cos Sin
L L
T
LGε F F I (3.29)

31
olarak bulunur. (3.29) şekil değiştirme tansörü, şekil değiştirmelerin Kartezyen eksen
takımındaki bileşenlerini temsil etmektedir. Bu yüzden tansörde hem boy uzaması
hem de kayma şekil değiştirmeleri görülmektedir. Bu durum Şekil 3.4 de
açıklanmıştır.
ġekil 3.4 : Uzama ve rijit dönme-öteleme yapan bir çubukta kayma şekil
değiştirmeleri.
İşlemleri kolaylaştırmak için (3.29) tansörünün asal bileşenleri ile çalışmak uygun
olacaktır. Bunun için şekil değiştirmemiş sistem üzerindeki 0 0 0( , , )X Y Z eksen
takımını kullanmak uygun olacaktır.
0 0
0 0
( ) ( ) 0
( ) ( ) 0
0 0 1
Cos Sin
Sin Cos
0T (3.30)
dönüşüm matrisi kullanılarak (3.29) un asal bileşenleri şekil değiştirmemiş sistemin
koordinatlarında
. .0
T
LG 0 LG 0ε T ε T (3.31)
şeklinde hesaplanabilir. İşlemler yapıldığında
0
X
Y
dX
dY
dx
dy
L
0L
0Y
0X

32
2 2 2
0 0( ) / (2 ) 0 0
0 0 0
0 0 0
L L L
0LGε (3.32)
olduğu görülecektir. (3.32) tansöründe görüldüğü üzere sadece eksenel uzama
bileşeni bulunmaktadır. Bu durum Şekil 3.5 de gösterilmiştir.
ġekil 3.5 : Uzama ve rijit dönme-öteleme yapan bir çubukta asal şekil değiştirme.
Gerilmelerle ilgili dönüşümler incelenmek istenirse ilk önce Cauchy gerilme
tansörünün tanımlanması gerekecektir. Kartezyen eksen takımında Cauchy gerilme
tansörü
2
2
( ) ( ) ( ) 0
( ) ( ) ( ) 0
0 0 0
Cos Cos Sin
Cos Sin Sin
Cauchyζ (3.33)
şeklinde yazılabilir. (3.33) tansöründeki gerilme Normal kuvvetin şekil değiştirmiş
cismin kesit alanına bölünmesi ile elde edilmiştir. İkinci Piola-Kirchhoff (2. PK)
gerilme tansörü
det( ) . . -1 -T
CauchyS F F ζ F (3.34)
şeklinde tarif edilmektedir. İşlemler yapıldığında Normal kuvvet çubuğunun
kartezyen eksen takımında 2. PK gerilme tansörü
0
X
Y
0dX
dx dy
L
0L
0Y
0X
0dY

33
2
0 0 0 0 0
2
0 0 0 0 0
( ) / ( ) ( ) / 0
( ) ( ) / ( ) / 0
0 0 0
Cos L L Cos Sin L L
Cos Sin L L Sin L L
S (3.35)
olduğu görülecektir. Görüldüğü üzere 2. PK tansörü şekil değiştirmemiş cisim eksen
takımında asal olmaktadır. (3.30) dönüşüm matrisi kullanıldığında 2. PK tansörünün
asal bileşenleri
0 / 0 0
0 0 0
0 0 0
L L
0S (3.36)
olmaktadır. (3.27) deformasyon gradyanı gereği kesit alanının değişmediği aşağıdaki
şekilde gösterilebilir.
0 0det( ) . .dA dA dA T -TF n F N (3.37)
olmaktadır. (3.37) de
0 0
{ ( ), ( ),0}
{ ( ), ( ),0}
Cos Sin
Cos Sin
T
T
n
N (3.38)
şeklinde tanımlanan şekil değiştirmiş ve değiştirmemiş çubuktaki alan elemanı
doğrultularıdır. 2.PK tansörü söz konusu olduğunda (3.6b) Virtüel İş Denklemini
kullanmak uygun olacaktır. Tansörel formda Virtüel İş denklemi
0( . ) i iTr L dV Q uL
T LGεS (3.39)
şeklinde yazılabilir. (3.37) eşitliği hatırlanarak işlemler yürütüldüğünde (3.39) ifadesi
i iA L Q u (3.40)
şekline dönüşmektedir. Görüldüğü üzere gerilme tansörü olarak 2. PK tansörü ve
virtüel şekil değiştirme tansörü olarak da Lagrange-Green şekil değiştirme
tansörünün varyasyonu, şekil değiştirmemiş hacim üzerinde integre edildiğinde
normal kuvvet tanımı uygun olmaktadır. Benzer bir tanım Cauchy gerilmesi ile
logaritmik virtüel şekil değiştirmenin kullanılmasıyla da (3.8) ve (3.9) da elde
edilmişti. Böylece

34
0( . )L
dV Tr dVL
T
LGS ε (3.41)
olduğu çubuk problemi için gösterilmiştir.
3.1.3 Sürekli ortam formülasyonu (sıkıĢmaz malzeme)
Şekil değiştirme esnasında çubuk hacminin her noktada sabit kalması durumu için
(3.21) konum vektörü aşağıdaki şekilde yeniden yazılmalıdır.
2 3r r m 2 3x x n n (3.42)
(3.42) de 2 ve 3 doğrultularındaki kesit daralma ve genişlemesini dikkate almak
üzere
(1 )v (3.43)
şeklinde yazılabilir. Burada v Poisson oranıdır. Hacmin sabit kalması için asal şekil
değiştirmeler arasında
1 2 3(1 )(1 )(1 ) 1 (3.44)
bağıntısının gerçekleşmesi gerekmektedir. Bu bağıntı büyük şekil değiştirme durumu
için de geçerlidir. (3.44) bağıntısı normal kuvvet taşıyan çubuk problemi için eksenel
şekil değiştirme cinsinden
2(1 )(1 ) 1v (3.45)
şekline dönüşmektedir. (3.45) yeniden düzenlendiğinde sıkışmaz malzeme için
0
0
0
1 11 /
11
v L LL L
L
(3.46)
olmalıdır. Problemin deformasyon gradyanı
0 00 0
0 0
0 00 0
0 0
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0
( ) ( ) ( ) ( )( ) ( ) ( ) ( ) 0
0 0
LCos Cos LCos SinSin Sin Sin Cos
L L
LSin Cos LSin SinCos Sin Cos Cos
L L
F (3.47)

35
şeklinde hesaplanmaktadır. Alan elemanı
2
0 0det( ) . .dA dA dA T -TF n F N (3.48)
olmaktadır. Yine 2.PK tansörünün asal bileşeni şekil değiştirmemiş cisim eksen
takımında
200
LS
L
(3.49)
olarak hesaplanabilir. (3.39) da verilen Virtüel İş Denklemi uygulandığında
2
0 0( . ) i iTr L dV A L A L Q uL
T LGεS
(3.50)
şeklinde hesaplanır. Görüldüğü üzere bu sonuç (3.40) da elde edilen sonuçla aynıdır.
3.1.4 Sonlu eleman denklemlerinin oluĢturulması
Sonlu eleman denklemlerini oluşturmak üzere (3.11) denlem takımı kullanılabilir.
Normal kuvveti belirlemek için bünye bağıntısı gerekecektir. Normal kuvvet çubuğu
ile ilgili bünye bağıntısı
k (3.51)
şeklinde yazılabilir. Burada gerilme ve şekil değiştirme arasındaki orantılılığın
korunduğu varsayılacaktır. Bu kabul genellikle şekil değiştirmenin küçük olması
durumunda geçerlidir. Ayrıca (3.51) denklemi için gerilme ve şekil değiştirme tipini
seçmek gereklidir. Bu seçim değişik şekillerde yapılabilir. Örneğin
0
0 0
L LN
A L
(3.52)
şeklinde seçildiğinde orantı katsayısı
k E (3.53)
olacaktır. Burada E çubuk malzemesinin elastisite modülüdür. Yaddoğrusal hesap
için Newton-Raphson yöntemi uygulanacaktır. Eleman yük vektörü (3.11) den

36
/
/
/
/
x
x
y
y
L L
L LN
L L
L L
ek (3.54)
şeklinde yazılabilir. Burada xL ve
yL elemanın izdüşüm boylarıdır. (3.54) deki e
indisi eleman anlamına gelmektedir. Bundan sonra yazılacak denklemlere elemana
ait olup bu indis gösterilmeyecektir. Teğet rijitlik matrisi (3.54) ün şekil değiştirmiş
cisim koordinatlarına göre gradyanı alınarak
iij
j
kK
x
(3.55)
bulunabilir. (3.51), (3.52) ve (3.53) bağıntılarını kullanarak normal kuvvet
00
0
L LN EA
L
(3.56)
şeklinde yazılabilir. (3.55) in hesaplanmasını kolaylaştırmak için (3.54) ün türevleri
alınırken zincir kuralı uygulanarak
yi i x iij
j x j y j
Lk k L kLK
L x L x L x
(3.57)
elde edilir. İşlemler yürütüldüğünde teğet rijitlik matrisi
1 1 3 3
1 1 3 3
0
3 3 2 2
3 3 2 2
EA
K (3.58)
şeklinde elde edilir. Burada
2
1
0
2
2
0
3
1 ( )
1 ( )
( ) ( )
Sin
L L
Cos
L L
Sin Cos
L
(3.59)

37
şeklinde hesaplanabilirler. (3.58) ve (3.59) incelendiğinde küçük yer değiştirmeler
durumunda matrisin bilinen doğrusal rijitlik matrisine indirgendiği görülebilir. (3.58)
matrisi hesaplanırken seçilen konum vekörünün yazılışı
1
2
1
2
x
x
y
y
x (3.60)
şeklindedir. Eleman denklemleri birleştirildikten sonra çözüm için ilerleme
algoritması aşağıda verilmiştir.
.i i i
i+1 i i
K Δx = q -k
x = x +Δx (3.61)
(3.61) deki büyüklükler eleman denklemlerinin birleştirilmesi ile oluşan sisteme ait
büyüklüklerdir. Burada q sabit dış yük vektörünü temsil etmektedir. Üst indisler ise
iterasyon numaralarıdır. (3.61) iterasyonu
i+1k Q (3.62)
olana kadar sürdürülür. Yaddoğrusal denklem takımının çözümü ile ilgili geniş bilgi
tez kapsamında ayrıca verilmiştir.
3.1.5 Birinci mertebe burkulma yükünün belirlenmesi
Burkulma yüklerinin belirlenmesi için teğet rijitlik matrisinin doğrusal ve geometrik
rijitlik matrisleri olarak ikiye ayrılması gerekir. Bunun için (3.54) de verilen eleman
yük vektörünün gradyanı alınırken normal kuvvetin korunması gerekir. Eleman yük
vektörünün bir başka yazılışının
( )
( )
( )
( )
Cos
CosN N
Sin
Sin
ek θ (3.63)
olduğu hatırlanarak (3.63) ün tam diferansiyeli
d dN Nd ek θ θ (3.64)

38
şeklinde yazılabilir. (3.64) ün sağındaki ilk terim doğrusal rijitlik matrisini
oluşturacaktır. İkinci terimdeki dθ vektörü ise geometrik teğet rijitlik matrisini
oluşturacaktır. Bu durumda ilgili matrisler
D
ij i
j
G iij
j
NK
x
Kx
(3.65)
şeklinde yazılabilirler. (3.65) matrislerinin belirlenebilmeleri için
D
ij i
j
yG i i x iij
j x j y j
N LK
L x
LLLK
L x L x L x
(3.66)
formunda yazılmaları daha uygundur. İşlemler yapıldığında doğrusal teğet rijitlik
matrisi
2 2
2 2
0
2 20
2 2
c c cs cs
c c cs csEA
L cs cs s s
cs cs s s
DK (3.67)
şeklinde hesaplanır. Geometrik teğet rijitlik matrisi ise
2 2
2 2
2 2
2 2
1
s s cs cs
s s cs cs
L cs cs c c
cs cs c c
GK (3.68)
olarak hesaplanır. (3.67) ve (3.68) de
cos( )
sin( )
c
s
(3.69)
kısaltmaları yapılmıştır. Eleman teğet rijitlik matrisi (3.64) den
N D GK K K (3.70)

39
şeklinde yazılır. Birinci mertebe yaklaşımı gereği sistemin burkulmaya ulaştığı anda
yer değiştirmelerin küçük olduğu varsayılır. Bu durumda şekil değiştirmiş konuma
ait büyüklükler şekil değiştirmemiş konumdaki değerleri ile eşit sayılarak (3.70)
denklemi yeniden yazılır. Verilen dış yüklemeye ait burkulma yükü ve ilgili modu
hesaplamak için ilk önce verilen dış yüklemede sistemin doğrusal analizi yapılarak
çubuklara gelen normal kuvvetler hesaplanır. Bunun için (3.61) iterasyonunun 1.
adımını çözmek yeterlidir. Bu çözümden elde edilen çubuk normal kuvvetleri
kullanılarak (3.70) eleman matrisleri birleştirilerek sisteme ait (3.71) özdeğer
problemi elde edilir.
( ) D GK K Δx = 0 (3.71)
(3.71) denklemini sağlayan değerleri sistemin burkulma çarpanlarıdır. Burkulma
çarpanı burkulma yükünün mevcut yüke oranı olarak tarif edilebilir. Sistemin
burkulma tahkikinde öz değer probleminden elde edilen en küçük pozitif burkulma
çarpanı kullanılmalıdır. Burkulma çarpanı dış yükler ve kritik yük arasında
mincrq q (3.72)
eşitliği yazılabilir.
3.1.6 Örnek kafes sistem analizleri
3.1.6.1 Örnek 1
ġekil 3.6 : İki çubuklu normal kuvvet sistemi.
Şekil 3.6 daki yükleme altındaki sistemde C noktasının düşey yer değiştirmesi
değişik şekil değiştirme ölçüleri için ve sabit alan-hacim durumları için Şekil 3.7 de
verilmiştir.
10
5
P
EA
A B
C
EA
25000EA

40
ġekil 3.7 : Örnek 1 e ait çeşitli şekil değiştirme ölçüleri için kuvvet-yer değiştirme
grafikleri.
Hesaplamalar kuvvet konturollü olduğu üzere yatay eksen kuvvet olacak şekilde
grafikler çizilmiştir. ―A‖ ön adı ile isimlendirilen grafikler sabit alan, ―V‖ ön adı ise
sıkışmaz malzeme (sabit hacim) anlamına gelmektedir.
Örnekte sıkışmaz malzeme ve sabit alan için logaritmik genleme, Lagrange-Green
genlemesi ve Biot genlemesi olmak üzere üç adet genleme için sonuçlar
incelenmiştir. Yapılacak yorumlar için genlemelerin kısa isimleri kullanılacaktır.
Ayrıca yorumlar sadece örnek sistem için geçerli olup yine de genleme kabulleri
hakkında önemli bilgiler açığa çıkarmaktadır.
Genel olarak ilk bakışta sıkışmaz malzeme kabulünün daha rijit bir sistem yarattığı
görülmektedir. Ayrıca genleme türü ne olursa olsun sıkışmaz malzeme kabulü ile
sistemde stabilite kaybı oluşmamaktadır. Bu durum ―CB‖ çubuğundan dolayı
gerçekleşmektedir. Yükün büyüklüğü ne olursa olsun sıkışmaz malzeme kabulü ile
çubuk boyu hiçbir zaman sıfıra ulaşamamaktadır.
Sabit alan kabulüne göre LG ve Biot genlemelerinde stabilite kaybı meydana gelmesi
mümkündür. Bu iki durum için dikey bölgeler kritik nokta sonrası atlamayı
göstermektedir. Kuvvet konturollü yapılan hesaplamalarda bu bölgede çözüm elde
etmek mümkün değildir.
Sabit alan kabulünde logaritmik genlemenin sıkışmaz malzeme kabulüne en yakın
sonucu verdiği gözlenmektedir.
0
2
4
6
8
10
12
14
16
0 0.2 0.4 0.6 0.8 1 1.2 1.4
V-Log
V-LG
V-Biot
A-Log
A-LG
A-Biot
V-
A-
A-
A-LG
P/EA
w
A--> Sabit Alan
V--> Sabit

41
Yine sabit alan kabulüne göre LG ve Biot genleme kabullerinin davranışları ilginçtir.
Biot genlemesi kabulü kısalma durumunda (stabilite kaybından önce) LG ye göre
daha rijit bir sistem yaratırken uzama bölgesinde (stabilite kaybından sonra) daha
yumuşak bir sistem oluşturmaktadır.
3.1.6.2 Örnek 2
ġekil 3.8 : İki boyutlu kafes sistem.
Örnekte n6 düğüm noktasına ait düşey yer değiştirme grafiği P nin artan değerleri
için çizilmiştir. Şekil 3.9 daki grafikte 600P de sistemin stabilitesinin kaybolduğu
gözlenmektedir. Grafikteki üç adet kritik nokta için şekil değiştirmiş sistem
görüntüleri Şekil 3.10 ve Şekil 3.11 de verilmiştir.
ġekil 3.9 : n6 düğüm noktasının düşey yer değiştirme-kuvvet grafiği.
0
200
400
600
800
1000
1200
0 1 2 3 4 5 6 7 8 9
w
P
A
B
C
1.5P
P
5
5
5
3
25000EA
X
Y
1n 4n
5n 6n
7n
1e
2e
3e
4e 5e
6e 7e 8e 9e
10e 11e 2P
P
2n 3n

42
ġekil 3.10 : Stabilite kaybı öncesi kafes sistem yerdeğiştirmesi (A noktası).
Şekil 3.10 da görüldüğü üzere stabilite kaybı 10e ||
7e ve 11e ||
6e elemanları paralel
hale geldiği noktada başlamaktadır.
A ve B noktaları arası ancak deplasman kontrollü bir yaklaşımla izlenebilir.
Sistemin doğrusal burkulma analizi yapıldığında kritik burkulma yükünün
1623crP
olduğu hesaplanmıştır.
ġekil 3.11 : Stabilite kaybı sonrası kafes sistem yerdeğiştirmesi (B noktası).
Bu sonuç Sap2000 programı ile de doğrulanmıştır. Geometrik yaddoğrusallık dikkate
alınarak elde edilen kritik yükün doğrusal burkulma analizine göre elde edilenden
oldukça küçük olduğu görülmektedir. Gerçek bir sistemde örnekte verilen ölçekte
büyük bir yer değiştirme olması plastikleşme olmadan oldukça zordur. Fakat teorik
anlamda bakıldığında bu sonuç oldukça önemlidir zira doğrusal hesaplama ile elde
edilen kritik yük güvensiz bölgede kalmaktadır. Hem doğrusal hem de yaddoğrusal
analizlerde EA rijitliği ile burkulma yükleri arasında doğru orantı olduğu
gözlenmiştir.

43
3.2 Eğilmeye ÇalıĢan Elemanlar
3.2.1 Kinematik bağıntılar
Şekil değiştirmiş cisim üzerinde denge denklemlerini yazabilmek için cismin şekil
değiştirmiş formunu yaklaşık bir fonksiyonla ifade etmek gerekecektir. Bu noktada
elemanın büyük dönme ve ötelemesini ifade etmekte büyük kolaylık sağlayan ve
elemanla birlikte dönen (co-rotational) bir eksen takımı seçilmiştir (Şekil 3.12).
ġekil 3.12 : Dönmüş lokal eksen takımında elemanın merkezsel ekseni.
m-neksen takımı şekil değiştiren elemanla birlikte dönmektedir. Eleman merkezsel
ekseni ( )mv x eğrisi ile tarif edilmiştir. Burada x , elemanın iki düğüm noktası
arasında tanımlanan doğrusal lokal eksen parametresidir. 1
ve 2
ise elemanın uç
noktalarındaki lokal dönme açılarıdır. Eleman düğüm noktalarının toplam dönmesi
açısı yardımıyla hesaplanacaktır. L mesafesi elemanın şekil değiştirmiş konumda iki
düğüm noktası arası mesafe olarak tanımlanmıştır. 1n ve
2n merkezsel ekseni takip
eden hareketli eksen takımıdır. Elemana ait deformasyon gradyanı ve şekil
değiştirme ölçülerinin hesaplanması için hareketli eksen takımının tam olarak
tanımlanması gerekmektedir.
Eğim süreksizliklerini (gradyant eşitsizliği) ortadan kaldırmak üzere merkezsel eksen
eğrisi (3.73) de verilen üçüncü derece Hermit fonksiyonu seçilmiştir.
3 21 2 1 212
2( )m
a a a av x x x a x
L L
(3.73)
X
( )mv x
1n
2n
x
m
n
1
2
Y
merkezsel eksen
L
mds

44
Burada ( )i ia tan şekilinde tanımlanmıştır. Eleman lokal eksen takımı ya bağlı
olarak
cos( ) sin( )
sin( ) cos( )
0 0
n m (3.74)
(3.74) de ki gibi ifade edilebilir. Eleman merkezsel ekseni Şekil 3.13 den görüleceği
üzere lokal eksen takımı ve x koordinatı cinsinden (3.75) ifadesi ile verilebilir.
ġekil 3.13 : Merkezsel eksenin vektörel ifadesi.
mx v m i
x x n m (3.75)
Doğal eksen takımını tarif etmek için (3.75) ün merkezsel eksen yay boyuna göre
türevi alınırsa
1
m
m
dsd d
ds dx dx
m m1
x xn (3.76)
elde edilir. Merkezsel eksenin diferansiyel boyu
2 2
m mds dx dv (3.77)
şeklinde hesaplanabilir. Buradan Yay boyunun x e göre türevi hesaplarda oldukça
önemli bir parametredir ve bu aşamadan itibaren ile gösterilecektir.
2
21 1 ( )m mm
ds dvv
dx dx
(3.78)
x
m
n
jx ix
mx
mv
Y
X

45
(3.75) ifadesi x e göre türetilip (3.78) tanımı (3.76) da yerine yazıldığında
m
dv
dx mx
n m (3.79a)
d
dx m
1
xn (3.79b)
ifadeleri elde edilir ve bu ifadeler eşitlenerek 1n doğal eksen vektörü, dönel eksen
takımı bileşenleri cinsinden
1 mv
1n n m (3.80)
şeklinde tarif edilmiş olur. 2n yi tanımlamak üzere sayfa düzlemine dik (0,0,1)3n
vektöründen faydalanılabilir. (3.80) in de yardımıyla
1 mv
2 3 1 3 3n n n n n n m (3.81)
elde edilir. (3.81) ifadesi 3n n m ve 3n m n olduğu göz önünde
bulundurularak sadeleştirilirse
1mv
2n n m (3.82)
şeklinde elde edilmiş olur. Doğal eksen takımı eleman şekil değiştirmesine ilişkin
kinematik koşulları ifade edebilmek için oldukça büyük kolaylık sağlamaktadır.
Elemanın kesiti merkezsel eksenine dik olarak tarif edilirse eleman kesit koordinat
vektörü Şekil 3.14 de görüleceği üzere
2 3r r m 2 3
x x n n (3.83)
şeklinde tarif edilebilir. (3.83) de 2r ve
3r sırayla 2n ve
3n doğrultularında
tanımlanan kesit içi cisim koordinatlarını ifade etmektedirler. Böylece x , 2r ve
3r
parametreleri ile elemanın şekil değiştirmiş konumdaki her noktasına
ulaşılabilmektedir. Son olarak (3.83) ün tam diferansiyeli alınmalıdır.
2 2 3( )d d
d r dx dr drdx dx
m 22 3
x nx n n (3.84)

46
ġekil 3.14 : Eleman kesit koordinat vektörü.
(3.84) ifadesi elemana ait deformasyon gradyanını verecektir. (3.83) de mx ve
2n nin
sadece x e bağlı olduklarına dikkat edilmelidir. Hesapları ilerletebilmek için (3.84)
deki türevleri almak gerekecektir. Bunun için (3.82) ifadesi x e göre türetilirse
2 2
m mv vd
dx
2nn m (3.85)
elde edilir. (3.78) den türev işlemi ile
2 21 ( )mv (3.86a)
m mv v (3.86b)
elde edilir ve (3.86 b) ifadesi (3.85) de yerine yazılarak terimi yok edilirse
3 3
m m mv v vd
dx
2nn m (3.87)
ifadesi elde edilir. (3.87) dikkatle incelendiğinde (3.80) ifadesi yardımıyla
2
mvd
dx
21
nn (3.88)
olduğu kolaylıkla görülebilir. Benzer biçimde 1n vektörünün türevi
2
mvd
dx
12
nn (3.89)
m
n
x
mx
2n
2r
Y
X

47
şeklinde elde edilir. (3.79 b) ve (3.88) ifadeleri (3.84) de yerlerine yazıldığında
konum vektörnün tam diferansiyeli son haliyle elde edilmiş olur.
2 32
mvd dx dr dr
1 2 3x n n n (3.90)
(3.90) matris formda yazıldığında
2
3
223
3
( ) ( )( ( ) ( ) )(1 ) 0
( ) ( )( ( ) ( ))(1 ) 0
0 0 1
r v Cos v SinCos Sin v
A A dxr v Cos Sin v
d Cos v Sin drA A
dr
x (3.91)
olmaktadır. (3.91) ifadesi
.d dx J r (3.92)
şeklinde yazılabilir. Elemanın referans konumunu (şekil değiştirmeden önceki
konum) tarif etmek için benzer şekilde referans konuma ait büyüklükler (merkezsel
eksen, doğal ve lokal eksen) tanımlanmalıdır. Bu tanımlar aynen şekil değiştirmiş
eleman üzerinde yapılan işlemlere benzer şekilde yapılabilir.
ġekil 3.15 : Referans sistemde merkezsel eksenin vektörel ifadesi.
Şekil 3.15 de başlangıçta eğrisel olan bir eleman görülmektedir. Konum vektörü
00 0 2 32
0
mvd dx dr dr
0 10 20 30x n n n (3.93)
0x
0m
0n
j0x i0x
m0x
0mv
0L Y
X

48
şeklinde yazılabilir. Referans konumdaki türevler 0x a göre alınmalıdır. Hesaplar
referans şekli doğrusal olan bir eleman için yapılacaktır. Bu durumda
0 0 0 0m m mv v v ve 0 1 olacaktır. x ve
0x arasındaki bağıntıyı elde etmek
oldukça kolaydır.
0 0
0 1
0 1
x tL t
x tL t
(3.94)
olduğu düşünülürse
00
Ldx dx
L (3.95)
olarak yazılabilir. (3.95) ifadesi (3.93) de yerine yazıldıktan sonra doğrusal elaman
için deformasyon gradyanını
1
.
. .( . )
.
d d
d d
0
0
0
x F x
J r F J r
F J J
(3.96)
şeklinde hesaplanabilir. Son olarak elemana ait Lagrange-Green şekil değiştirme
tansörünün referans konuma ait eksen takımındaki ifadesi elde etmek için
0 0
0 0
( ) ( ) 0
( ) ( ) 0
0 0 1
Cos Sin
Sin Cos
0T (3.97)
dönüşüm matrisinden faydalanılarak
0
1.( . ).
2 T T
LG 0 0ε T F F I T (3.98)
işlemi yapıldığında (3.99) ifadesi elde edilir.
2 2 2 2 22 20
2 22 2 2 4
0 0 0
1 1( ) 0 0
2 2
0 0 0
0 0 0
L L L Lr v r v
L L L
0LGε (3.99)

49
3.2.2 Sonlu eleman denklem takımının elde edilmesi
Sonlu eleman denlem takımını elde etmek üzere enerji yöntemleri veya yönetici
diferansiyel denklemin zayıf formunun kullanılması mümkündür. Tez kapsamında bu
yöntemlerin dışına çıkılarak doğrudan eleman denge denklemleri yazılması yoluna
gidilmiştir. Denge denklemleri şekil değiştirmiş eleman üzerinde sağlanmalıdır.
Elemana ait uç kuvvetler, kesit tesirleri cinsinden Şekil 3.16 dikkate alınarak
belirlenebilir.
ġekil 3.16 : Eleman uç kuvvetleri ve kesit tesirleri.
Şekil 3.16 da her iki parçada yatay denge denklemleri
1 2N T Q Q 1 2
n n i j 0 (3.100a)
4 5N T Q Q 1 2
n n i j 0 (3.100b)
şeklinde yazılabilir. (3.74), (3.80) ve (3.82) ifadeleri (3.100) de yerlerine yazılıp
düzenlendiğinde yatay denge denklemleri
1( ) ( ) ( ) ( )m mN Tv Cos Nv T Sin Q (3.101a)
2( ) ( ) ( ) ( )m mN Tv Sin Nv T Cos Q (3.101b)
4 1Q Q (3.101c)
5 2Q Q (3.101d)
şekline dönüşmektedir. Moment denge denklemi Şekil 3.17 dan
x
m
n
Y
X
L
M
N
T
T
M
3Q 1Q
2Q
4Q
5Q
6Q
mx
1n
2n

50
ġekil 3.17 : Eleman moment dengesi.
3M Q m i i
k k x R x R 0 (3.102)
şeklinde yazılabilir. Yatay ve düşey denge denkleminden
i
R R 0 (3.103)
olduğu bilindiğine göre (3.102)
3 ( )M Q m i
k k x x R 0 (3.104)
şekline dönüşür. Kesit tesirleri ve koordinat vektörleri
N T 1 2
R n n (3.105a)
mx v m i
x x n m (3.105b)
olduğuna göre (3.105) ifadeleri (3.104) de yerlerine yazılırsa
3 m m m mQ M Nv x Tx Nv Tv v (3.106)
elde edilmiş olur. (3.106) ifadesi elde edilirken aşağıdaki bağıntılar kullanılmalıdır.
m mv v
1n n n m k (3.107a)
1 1
2n n n m k (3.107b)
x
m
n
Y
X
L
M
R
T
M
3Q
6Q
mx
1n 2n
R i
R
jR
ix
jx

51
1 1
1m n m n k (3.107c)
m mv v
2m n m n k (3.107d)
6Q uç kuvvetini bulmak için eleman denge denklemlerinden j ucuna göre moment
alınarak
6 3 1 2( ) ( )Q Q Q LSin Q LCos (3.108)
elde edilir.
3.2.3 Bünye denklemleri ve iç yük vektörünün elde edilmesi
Bir sonraki aşama olarak kesit tesirleri ile elastik eğri arasındaki bağıntıları elde
etmek gerekmektedir. Bunun için çubuk bünye denklemlerinden yararlanılacak ve
şekil değiştirmelerin küçük olduğu varsayılacaktır. İlk olarak normal kuvvet için
kesit birim uzaması
0 0
0 0
mm
ds dx dx dx
dx dx
(3.109)
şeklinde tarif edilebilir. (3.95) ifadesi (3.109) da yerine yazılarak
0
1m
L
L
(3.110)
olarak bulunabilir. Normal kuvvet A kesit alanı olmak üzere
mN EA (3.111)
şeklinde hesaplanabilir. Moment için
3/2 321 ( )
m m
m
v vM EI EI EI
v
(3.112)
ifadesi geçerli olmaktadır. Kesme kuvvetini hesaplamak üzere
4 53m m
m m
v vdM dM dx MT EI EI
ds dx ds
(3.113)

52
şeklinde olacaktır. Yapılan hesaplarda Kesme kuvvetinin (3.113) deki gibi
alınmasının hesapları olumsuz etkilediği görülmüştür. Bu durumun sebebi
anlaşılamamış olup kesme kuvveti
4
mvT EI
(3.114)
olarak alındığında hesapların düzeldiği gözlenmiştir. Elemanlar arası süreklilik
koşullarının sağlanması üzerine eleman bilinmeyenlerinin seçilmesi gerekmektedir.
Açı sürekliliğinin sağlanması için eleman uç noktalarının, eleman referans
konumundan itibaren dönmeleri dikkate alınmalıdır. Bu bağlamda elemanın açısal
bilinmeyenleri Şekil 3.18 de gösterilen i ler seçilmelidir.
ġekil 3.18 : Elemanın açısal bilinmeyenleri.
Şekil 3.18 den de görüleceği üzere açısal bilinmeyenler
0i i (3.115)
şeklinde yazılabilirler. Böylece (3.73) elastik eğri ifadesinde kullanılan ia
bilinmeyenleri
0( ) ( )i i ia Tan Tan (3.116)
şeklinde yazılmalıdır. Diğer bilinmeyenler ise elemanın şekil değiştirmiş konumdaki
uç noktalarının koordinatları olarak seçilmiştir. Son olarak elemana ait denklem
takımı seçilen bilinmeyenler cinsinden ifade edilecektir. (3.101), (3.106) ve (3.108)
m
n
1
2
Y
X
0m
0n
0
1 0n
0n
2
n
0

53
denklemleri şekil değiştirmiş konumda x parametresine bağlıdır ve 0 x L
aralığındaki her x için sağlanmalıdır.
Her x değeri için bu denklemleri sağlayacak çözümlerin bulunması oldukça zordur.
Bu durumda ilgili denklemlerin integral anlamda sağlatılması yoluna gidilmiştir.
Şekil değiştirmiş eleman boyu
0
L
dx (3.117)
olmak üzere eleman uç kuvvetleri
1 1 2( ) ( ) /Q I Cos I Sin (3.118a)
2 1 2( ) ( ) /Q I Sin I Cos (3.118b)
3 [ ] [ ] [ ] [ ] [ ] /m m m mQ I M I Nv x I Tx I Nv I Tv v (3.118c)
şeklinde hesaplanmıştır. (3.118) deki gösterimde
0[.] (.)
L
I dx (3.119a)
1 [ ] [ ]mI I N I Tv (3.119b)
2 [ ] [ ]mI I Nv I T (3.119c)
şeklinde tanımlanmıştır. (3.118) denklemleri oluşturulurken iQ uç kuvvetlerinin
sabit büyüklükler oldukları ( x den bağımsız oldukları) düşünülmüştür. Ayrıca
integrallerin her terimde için ayrı ayrı alınması eleman performansını ayarlamak
bakımından önemlidir. Yapılan hesaplarda terimler için farklı integrasyon
şemalarının seçiminin sonuçları etkilediği görülmüştür.
3.2.4 Örnek problemler
3.2.4.1 Örnek 1
Geliştirilen elemana ―MyBeam‖ ismi verilmiş ve konsol kiriş probleminde test
edilmiş ve sonuçlar ANSYS ve SAP2000 programları ile karşılaştırılmıştır. Elemanın
özellikleri Şekil 3.19 de verilmiştir.

54
ġekil 3.19 : Konsol kiriş örneği.
Sonuçlar P yükünün çeşitli değerleri ve değişen eleman sayıları için Şekil 3.20 de
ve devamı Ek A.1 de verilmiştir.
ġekil 3.20 : Konsol kiriş statik analizi : ANSYS, Sap2000 ve MyBeam.
Grafiklerde konsolun uç çökmesi ve mesnet momenti verilmiştir. Sonuçlar
incelendiğinde geliştirilen elemanın tek eleman performansının oldukça yüksek
olduğu görülmektedir. Ayrıca konsol kiriş boyunun yarısına varan çökme değerlerini
iki elemanla kesin olarak hesaplayabilmesi de oldukça dikkate değerdir.
3.2.4.2 Örnek 2
İkinci örnek bir çerçeve problemi olarak seçilmiştir. Şekil 3.21 de verilen sistem için
yük-yer değiştirme grafikleri elde edilmiştir.
325
330
335
340
345
350
355
1 2 3 4 5 6 7 8 9 10
Dü
şey
Yer
Değ
işti
rme
Eleman Sayısı
(L=1000 , P = 0.2)
ANSYS
SAP2000
BEAM#
Teorik
1000L
P
3456E
Kiriş Kesiti
5
5

55
ġekil 3.21 : Çerçeve statik analizi.
Şekil 3.22 de yer değiştirme arttıkça sistemin rijitleştiği görülmektedir. Bu durum
genelde eğilmeye çalışan sistemlerde büyük yer değiştirme durumunda normal
kuvvetlerin devreye girmesi sonucu oluşmaktadır.
ġekil 3.22 : Çerçeve sistem yük-deplasman grafiği (C noktası düşey).
Sistemin değişik P yükleri altında yer değiştirme çizimleri Şekil 3.23 de verilmiştir.
0
0.5
1
1.5
2
2.5
0 500 1000 1500 2000 2500
P
P
w
P
,EI EA
,EI EA
L
L
180000EI
86400EA
A
B C
1000L

56
ġekil 3.23 : Çerçeve sistemin eğilme çizimleri.
Şekil 3.24 de 2, 4 ve 16 eleman için ―C‖ noktasına ait düşey yer değiştirme grafikleri
verilmiştir.
ġekil 3.24 : Değişik eleman sayıları için yük-deplasman grafikleri.
0
500
1000
1500
2000
2500
0 0.5 1 1.5 2 2.5
w4x4
w1x1
w2x2
P
w
A

57
Grafiklerden de görüleceği üzere 2x2 eleman için bile oldukça doğru sonuçlar elde
edilmiştir. Bu durum geliştirilen eleman performansının oldukça iyi olduğunu
göstermektedir. Şekil 2.12 deki grafikte işaretlenen ―A‖ noktasına kadar 1x1
elemanın bile oldukça iyi sonuçlar verdiği görülmektedir. A noktasındaki yer
değiştirme değerine dikkat edilirse bir eleman boyunun yaklaşık 1.5 katı olduğu
görülür. Bu derece büyük bir yer değiştirme 1x1 elemanla oldukça doğru
hesaplanmıştır.
ġekil 3.25 : Değişik eleman sayıları için yük-deplasman grafikleri.
Şekil 3.25 de 2x2 eleman ağı için Sap2000 programı ile ―MyBeam‖ elemanından
elde edilen sonuçlar ―C‖ noktasının çökmesi için karşılaştırılmıştır. Sonuçların
birbirine oldukça yakın oldukları görülmektedir.
3.2.5 Doğrusal burkulma problemi
Burkulma problemi basınç normal kuvveti altındaki sistemlerin kritik yük eşiği
aşıldığında kararlı denge konumundan ayrılıp yeni bir denge konumuna geçmesi
durumu olarak düşünülebilir.
Bu bölümde yapılan hesaplamalarda burkulma esnasında sistemdeki yer
değiştirmelerin küçük olduğu varsayılmıştır. Çubuk eleman boyunca alınan sonsuz
küçük boyunda bir parça üzerinde denge denklemi yazıldığında (Şekil 3.26)
0
500
1000
1500
2000
2500
0 2 4 6 8 10 12
Sap2000
MyBeam
P
w

58
ġekil 3.26 : Şekil değiştirmiş elemana ait diferansiyel parçada kesit tesirleri.
sol kesite göre moment denkleminden limit halde
dM dvT N
dx dx (3.120)
elde edilir. (3.120) denklemi x e göre türetildiğinde
2 2
2 2
d M d vq N
dx dx (3.121)
elde edilir. Klasik olarak bilinen Moment-eğrilik ve eğrilik-elastik eğri bağıntıları
(3.121) de yerine yazıldığında burkulma problemine ilişkin yönetici diferansiyel
denklem rijitliği sabit eleman için
4 2
4 2
d v d vEI N q
dx dx (3.122)
şeklinde elde edilmiş olur. Burada esas amaç burkulma problemini çözmek üzere
diğer kesit tesirlerinin dışında normal kuvvet etkilerini ortaya çıkarmaktır. (3.122)
yönetici denkleminde standart sonlu eleman türetme uygulaması gerçekleştirildiğinde
normal kuvvet içeren terim Geometrik Rijitlik Matrisini vermektedir. Uygulamada
bu matris terimleri aşağıdaki şekilde hesaplanabilir.
1P
N
T
T
N
1Q
1M
2P
2Q
2M q
N
N
dx
v v dv T
T dT M
M dM

59
0
( )
L
i i
v vW dx
x x
(3.123a)
(.)(.)i
iu
(3.123b)
G iij
j
WK
u
(3.123c)
Yaklaşım fonksiyonları kübik Hermit fonksiyonları olarak seçildiğinde yerel eksen
takımındaki kütle matrisi
2 2
2 2
36 3 36 3
3 4 31
36 3 36 330
3 3 4
L L
L L L L
L LL
L L L L
GK
(3.124)
şeklinde bulunmaktadır.
3.2.6 Burkulma problemi
Bu çalışma kapsamında çubuk sistemlerin büyük yer değiştirme kabulü ile dinamik
analizleri sunulmuştur. Bu analizler aynı zamanda sistemin burkulma yükünü
belirmek için de kullanılabilir. Verilen yükleme altında sistem davranışınında
burkulma tipi bir davranışın gözlenmesi yeterli olacaktır.
Belirli bazı durumlarda kritik yük aşılmasına rağmen burkulma gözlenmeyecektir.
Bu durumlarda normal kuvvetin eğilmeye olan etkisini ortaya çıkarmak üzere
sisteme ―basit kusur‖ olarak da adlandırılabilecek ön deformasyonlar vermek
gerekecektir.
3.2.6.1 Örnek 1
ġekil 3.27 : Konsol kiriş hareketli burkulma örneği.
1000L
P 34560000
Kiriş Kesiti
5
5
P

60
Şekil 3.27 deki sistemde sabit P yükü altında yapılan dinamik hesaplamalarda
düşey deplasman oluşması mümkün değildir. Yükün burkulma yaratıp
yaratmayacağını görmek üzere sistemde çok küçük bir eğilmeye yol açacak bir
kuvvet verilmek suretiyle P yüklemesinin eğilmeyi büyütüp büyütemeyeceği
gözlenerek burkulma yüküne erişilmeye çalışılacaktır. Yapılan çözümlemelerde
burkulma olmaması durumunda konsol kirişin küçük salınımlar yaptığı (Şekil 3.28),
burkulma olması durumunda kontrolsüz bir şekilde büyük eğilme gösterdiği
gözlenmiştir (Şekil 3.29).
ġekil 3.28 : Konsol kiriş düşey uç deplasman grafiği (stabil durum).
Görüldüğü üzere burkulma yükünün altında yapılan yüklemede küçük salınımlar
oluşmaktadır.
ġekil 3.29 : Konsol kiriş düşey uç deplasman grafiği (burkulma durumu).
0
0.00001
0.00002
0.00003
0.00004
0.00005
0.00006
0.00007
0.00008
0.00009
0 1 2 3
w
0
10
20
30
40
50
60
70
80
90
100
0 1 2 3 4 5
w

61
Şekil 3.29 da görüldüğü üzere salınım gerçekleşmemekte ve çubuk kütlesine bağlı
olarak belirli bir süre sonra burkulma başlamaktadır. Belirtilen şekilde yapılan
çözümlemelerden ve doğrusal burkulma analizlerinden elde edilen sonuçlar Şekil
3.30 da özetlenmiştir.
ġekil 3.30 : Konsol kiriş kritik hareketli burkulma yükü – eleman saysı grafiği.
Şekil 3.30 da görüldüğü üzere yapılan çözümlemeler sonucunda Euler burkulma
yüküne 8 elemanda ulaşılmıştır. Tek elemanla elde edilen sonuç pek tatmin edici
değildir.
Yapılan çözümlemeler sonucu çubuk kütlesinin ve P yükünün büyüklüğünün
burkulma yükünü etkilemediği görülmüştür.
3.2.7. Bezier eğrileri ile yaddoğrusal kiriĢ problemi
Günümüzün teknolojik gelişmeleri ışığında pek çok alanda, yük etkisi altında büyük
ötelemeler ve dönmeler yapan sistemlerin incelenmesi zorunlu hale gelmiştir.
Özellikle otomatik kontrol sistemleri, nano teknoloji ve tıp alanında karşılaşılan
birçok problemin modellenmesi doğrusal hesaplamalarla mümkün olmamaktadır.
Gelişen bilgisayar ve grafik sistemleri ile birlikte, problemlerin bilgisayar ortamına
aktarılması ve geliştirilen sayısal yöntemler yardımıyla hesaplamalar oldukça
kolaylaşmıştır. Yapılan çözümlerde genel olarak sonlu elemanlar, sonlu farklar veya
sınır eleman yöntemleri kullanılmaktadır. Problemin analizine geçilmeden önce
sistemin geometrisi ve malzeme özelliklerinin yanı sıra etki eden yüklerin de
3700
3800
3900
4000
4100
4200
4300
4400
4500
0 1 2 3 4 5 6 7 8
Euler
Pcr
Eleman Sayısı

62
belirlenmesi gerekir. Sistem geometrisinin belirlenmesi genellikle grafik ortamda
yapılmaktadır. Günümüz bilgisayarlarında hâlihazırda kullanılan grafik tasarım
programlarının vazgeçilmez bileşenleri Bezier eğrileridir. Bezier eğrileri çeşitli
kontrol noktaları ile tarif edilen ve bu kontrol noktalarının uzaydaki konumlarına
göre oldukça farklı şekiller alabilen parametrik eğrilerdir. Sadece dört kontrol noktası
ile belirlenen üçüncü mertebe eğrilerin alabildiği şekillerin çeşitliliği bu eğrilerin
sonlu yer değiştirme problemlerinin çözümünde uygun biçimde kullanılabileceği
izlenimini vermiştir. Zira büyük yer değişimine maruz kalan sistemlerin geometrisi
çok çeşitli şekiller almaktadır. Tez kapsamında başlangıçta iki boyutlu çubuk
sistemlerin tekil uç kuvvet altında geometrik yad-doğrusal yer değiştirme problemi
Bezier eğrileri kullanılarak çözülmüş ve sonuçlar analitik çözümler ve paket program
çözümleri ile karşılaştırılmıştır. Çözümlerde şekil değiştirmelerin küçük olduğu ve
malzemenin de Hooke yasalarına uyduğu varsayılmıştır.
3.2.7.1 Bezier eğrileri
Bezier eğrileri 1962 yılında Fransız otomotiv mühendisi Pierre Bezier tarafından
bulunmuştur. Bu eğriler ilk olarak otomobil gövde tasarımı için kullanılmıştır. Şekil
3.31 de üçüncü örnek bir Bezier eğrisi ve kontrol noktaları verilmiştir.
ġekil 3.31 : Üçüncü mertebe Bezier eğrisi ve dört kontrol noktası.
n. mertebe Bezier eğrisi n+1 adet kontrol noktasından oluşmakta olup
(3.125)
şeklinde tarif edilir. (3.125) de
!
!( )!
n n
i i n i
(3.126)
1P
0P
2P
3P

63
Binom katsayılarıdır. Örnek olarak üçüncü mertebe Bezier eğrisinin parametrik
denklemi
(3.127)
olmaktadır. Bezier eğrilerinin önemli bir özelliği de ilk iki ve son iki kontrol
noktalarını birleştiren doğrulara teğet olmalarıdır (Şekil 1.1). (3.125) de
(3.128)
polinomları Bernstein polinomları olarak bilinmektedir. için Bernstein
polinomları Şekil 3.32 deki gibidir.
ġekil 3.32 : Üçüncü mertebe Bernstein polinomları.
3.2.7.2 Sonlu yer değiĢtirme hesabı
Büyük kesit dönmeleri ve büyük yer değiştirme hesabı yapmak üzere, kiriş
geometrisi aralığında değişen parametresine bağlı olarak keyfi bir Bezier
eğrisi ile tarif edilecektir. Eğrinin genel formu
(3.129)
şeklinde oluşturulabilir. Burada ve ler Şekil 1.1 de görülen kontrol noktalarıdır.
Bezier eğrilerinin mertebeleri arttıkça kontrol noktalarının sayısı da artmaktadır.
(3.129) da tarif edilen eğrinin adet serbestliği bulunmaktadır. Kiriş
problemine ait yer değiştirmiş konum ve referans konum Bezier eğrileri ile Şekil
3.33 deki gibi belirlenecektir.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.2 0.4 0.6 0.8 1
B03
B13
B23
B33

64
ġekil 3.33 : Yer değiştirmiş konum ve referans konum.
Şekil 3.33 de referans konuma ait büyüklükler büyük harflerle gösterilmiştir. Konum
vektörleri Bernoulli-Navier hipotezinin geçerli olduğu varsayılarak yazılacaktır.
Çubuğun kesit ağırlık merkezini takip eden eğriler (3.130) ile tarif edilebilir.
(3.130a)
(3.130b)
Eğrilerin teğet ve normal birim vektörleri
(3.131a)
(3.131b)
şeklinde hesaplanabilir. (3.131) de kullanılan ifadelerde yay boylarının türevleri
(3.132) bağıntıları ile hesaplanmıştır. ifadesi yi ifade etmektedir;
(3.132a b)
Referans ve yer değiştirmiş konum vektörleri
ve (3.133a b)
şeklinde ifade edilebilir. Konum vektörünün değişimini bulmak üzere

65
ve (3.134a b)
olacaktır ve çubuk kesitinin herhangi bir noktasındaki Lagrange-Green genlemesi
(3.134) kullanılarak
1 .( , ) 1
2e t
r r
R .R (3.135)
şeklinde tarif edilebilir. (3.135) genlemesini hesaplayabilmek için (3.131) de ve
vektörlerinin türevlerini hesaplamak gerekecektir. Örnek olarak şekil değiştirmiş
konum için vektörünün türevi
(3.136)
olmaktadır. terimini hesaplamak için
(3.137)
ifadesinde her iki taraf türetilerek sadeleştirmeler yapılırsa
(3.138)
elde edilir. (3.138) ifadesi (3.136) da yerine yazılarak işlemler yürütüldüğünde
(3.139)
şeklinde hesaplanabilmektedir. (3.139) daki tüm terimler Bernstein polinomlarının
türevleri ve kontrol noktalarının koordinatları ile hesaplanabilirler. Referans konum
için de benzer ifadeler bulunur. Çubuk kesitinin dikdörtgen olduğu düşünülerek
(3.140) değişken dönüşümü yapılabilir.
(3.140)
Burada kiriş kesit yüksekliğidir. (3.140) değişken dönüşümü ile kiriş üzerindeki
herhangi bir noktaya ve koordinat parametreleri ile
ulaşılabilmektedir (Şekil 3.34).
(3.130a), (3.134a), (3.139) ve (3.140) ifadeleri kullanılarak konum vektörünün türevi
(3.141)

66
şeklinde hesaplanarak (3.135) de yerine yazılabilir.
ġekil 3.34 : Koordinat parametreleri.
Benzer işlemler referans konum için de düşünülebilir. Böylece Lagrange-Green
genlemesi kirişin her noktasında koordinat parametrelerinin ve kontrol noktalarının
fonksiyonu olarak elde edilmiş olur.
(3.142)
(3.142) genlemesinin Şekil 3.33 de verilen teğet vektörü doğrultusundaki
gerilmeler tarafından oluşturulduğu unutulmamalıdır.
3.2.7.3 Virtüel iĢ teoremi ve yönsel türev
Yer değiştirmiş konumdaki denge denklemleri Virtüel İş Teoremi ile bulunabilir.
ġekil 3.35 : Kontrol noktaları ve uç kuvvetler.
Şekil 3.35 de verilen çubuk kesitinde gerilmelerin (3.131a) da verilen teğet vektörü
doğrultusunda olduğu kabulü ile adet vitüel iş denklemi yazılabilir. Yayılı
yükler olmaması durumunda denklemler
(3.143a)
(3.143b)

67
şeklinde olacaktır. (3.143) de üzerinde toplama yoktur. Bu denklemlerde
ifadesi Lagrange-Green genlemesinin yünündeki türevini ifade etmektedir. Burada
çubuk kontrol noktalarında tanımlanan uç kuvvetlerdir ve ilgili doğrultudaki
İkinci Piola-Kirchhoff gerilmesidir. Çubuk ekseni üzerinde olmayan kontrol
noktalarında alınmalıdır. Bu durumda Bezier eğrilerinin özelliği gereği ancak
çubuk uç noktalarında kuvvet tanımlanabilmektedir. Ara noktalarda tanımlanacak
tekil yükler için virtüel iş denklemi (3.143) deki kadar basit olmayacaktır. Tez
kapsamında kuvvetler çubuk uç noktalarında tanımlanmıştır.
(3.143) denklemi, kontrol noktalarının koordinatları ile yazılmış olduğu için, çubuk
uç noktalarındaki dönme tipinden sınır koşullarının yazılması zorlaşmaktadır. Bu
zorluğu Lagrange çarpanı yöntemiyle aşmak mümkündür.
(3.143) denklem takımında Lagrange-Green genlemesinin yönsel türevleri yaklaşık
olarak aşağıdaki şekilde alınabilir. Örnek olarak koordinatları yönündeki türev
merkez farklar kullanılarak
( ) ( )( )
2i
i i i ix i i
i i
e x p e x pee x x
x p
(3.144)
şeklinde ifade edilebilir. Yapılan çözümlerde merkez farklar ile alınan
varyasyonların ileri ve geri farklara göre çok daha iyi sonuçlar verdiği gözlenmiştir.
Esasında varyasyonun kesin değeri nin seçiminden bağımsızdır. Fakat sayısal türev
alındığı durumlarda nin seçimi önem kazanmaktadır. Yapılan çözümlerde
olmak üzere
(3.145)
seçilmiştir. nın seçimi ile ilgili yaklaşım ayrı bir inceleme konusu olarak
beklemektedir. İlgili işlemler koordinatları için de benzer şekilde yürütülmelidir.
(3.143) denklem takımı gerilme-genleme bağıntılarının doğrusal olduğu kabulü ile
(3.146)
şeklinde yazılabilir. Burada çubuk malzemesinin elastisite modülüdür. Son olarak
sayısal integrasyon yapmak üzere (3.146) denklemlerinin Şekil 3.34 deki koordinat
takımında ifadesi

68
(3.147)
şeklinde yazılır. (3.147) de çubuk kesit genişliğidir. ise koordinat dönüşüm
Jacobien‘ inin determinantıdır. Koordinat dönüşüm Jacobien‘ i (3.148) ile verilmiştir.
(3.148)
3.2.7.4 Yaddoğrusal denklem takımını çözümü
(3.148) de verilen denklem takımına ait dış yük vektörü bileşenleri
(3.149)
şeklinde yazılabilir. Yaddoğrusal denklem takımı
(3.150)
olmaktadır. (3.150) denklemlerinde ve koordinatlarına ait serbestlikler
birleştirilmiştir. Dış yük vektörüne ait teğet matris, sayısal türev alınarak aşağıdaki
gibi elde edilebilir.
( ) ( )( )
2
j i j iiij
j j
K KKKT
r
r p r pr
p (3.151)
(3.151) de jp vektörü . elemanı ilgili koordinat varyasyonu olan, diğer elemanları
sıfır olarak tanımlanmıştır. Varyasyon (3.145) e benzer şekilde verilmektedir.
(3.150) denklem takımını çözmek üzere Newton-Raphson iterasyonu
(3.152)
şeklinde oluşturulabilir. (3.152) de üzerinde toplama uzlaşımı mevcuttur. (3.152)
iterasyonu
( )
1 ( )
P K r
K r (3.153)
şartı sağlanana kadar devam ettirilmektedir. seçilmiştir.
3.2.7.5 Dönme sınır koĢulunun denklem takımına etkisi
(3.149) denklem takımında dönme türünden serbestlikler yoktur. Denklem takımının
bilinmeyenleri yer değiştirmiş konumu tarif eden Bezier eğrisinin kontrol noktaları

69
koordinatlarıdır. Bu durumda basit mesnet ve kayıcı mesnet koşulları direkt olarak
ilgili serbestlik yok edilerek verilebilmektedir. Ankastre koşulu ise iki yolla
verilebilir. Birinci yol ilgili mesnet noktasında eğrinin eğimini belirleyen kontrol
noktasına ait serbestlikleri de yok etmektir.
ġekil 3.36 : Bezier eğrisi ve kontrol noktaları.
Örnek olarak Şekil 3.36 de noktasında ankastre mesnet tanımı için eğrinin bu
noktadaki eğimini belirleyen noktasına ait serbestlikleri de yok ederek eğrinin bu
noktada eğim değiştirmemesi sağlanabilir. Bu yöntem uygulamada basitlik getirse de
eğrinin serbestlik sayısını gereksiz yere düşürmektedir. ve in tanımladığı
eğimin sabit kalması ile ilgili tek koşul yer değiştirmiş ve referans konumlar göz
önünde bulundurulduğunda
ġekil 3.37 : Yer değiştirmiş ve referans konumlara ait Bezier eğrileri.
Şekil 3.37 deki örnek durum için eğer noktasının ankastre olması isteniyorsa
1 0 1 0
1 0 1 0
X X Y Y
x X y Y
(3.154)
koşulunun sağlanması yeterlidir. (3.154) koşulu denklem formunda
(3.155)
şeklinde yazılabilir. Bu koşul (3.149) denklem takımına Lagrange Çarpanı yöntemi
ile eklenebilir. (3.149) denklem takımının bir fonksiyonelinin minimum olma
koşulu olduğu göz önünde bulundurularak fonksiyonel

70
(3.156)
şeklinde güncellenebilir. (3.156) da
(3.157)
olduğu üzere (3.149) denklem takımı aşağıdaki şekilde güncellenmelidir.
(3.158a,b)
3.2.7.6 Sayısal uygulamalar
Doğru eksenli ankastre kiriĢ
İlk örnek olarak ankastre kiriş ucuna tekil yük uygulaması problemi çözülmüştür
(Şekil 3.38). Elde edilen sonuçlar teorik sonuçlarla ve Sap2000 programı ile
karşılaştırılmıştır.
ġekil 3.38 : Ankastre mesnetli doğru eksenli kiriş.
; ; değerleri için yapılan çözümler Ek A.3 de
verilmiştir. Çözülen problemdeki yer değiştirmelerin mertebesini göstermek üzere
yapılan programdan örnek bir görüntü Şekil 3.39 da verilmiştir.
ġekil 3.39 : Örnek program çıktısı.
Şekil 3.39 da referans konum ve yer değiştirmiş konum birlikte gösterilmiştir.
Konumlar üzerindeki noktalar Bezier eğrilerinin kontrol noktalarıdır. Referans
konumun kontrol noktaları değişmemektedir. Çözüm esnasında yer değiştirmiş

71
konuma ait kontrol noktalarının koordinatları denge denklemleri sağlanacak şekilde
belirlenmektedir. Şekil 3.39 daki eğriler dördüncü derece Bezier eğrileridir. Değişik
yüklemelerde oluşan yer değiştirmiş konumlar Şekil 3.40 de verilmiştir.
ġekil 3.40 : PL2/EI = 2, 10 ve 15 için yer değiştirmiş konumlar.
Sap2000 programı ile yapılan karşılaştırmalı grafikler Şekil 3.41 de .verilmiştir.
ġekil 3.41 : Konsol kiriş statik analizi Sap2000 ile karşılaştırma.
Eğri eksenli ankastre kiriĢ
İkinci örnek olarak ankastre mesnetli eğrisel (parabolik) kiriş ucuna tekil yük
uygulaması problemi çözülmüştür. Elde edilen sonuçlar Sap2000 programı ile
karşılaştırılmıştır. Eğrisel çubuğun geometrisi keyfi kontrol noktaları ile
oluşturulmuştur. Sap2000 programında eğrisel elemanlar mevcut değildir. Bu yüzden
Sap2000 de çubuk geometrisine doğru eksenli çubuklarla yaklaşılmaya çalışılmıştır.
Eğrisel geometriyi tarif edebilmek için birçok çubuk gerektiğinden sonuçları az
sayıda elemanla karşılaştırma şansı yoktur.
0.811
0.7
0.8
0.9
1
2 3 4 5 6 7 8
w/L
Derece
PL2/EI=10 İçin Düşey Yer Değiştirme
Teorik
BEZİER
SAP2000

72
ġekil 3.42 : Ankastre mesnetli eğri eksenli kiriş.
Eğri fonksiyonu belli olan çubukların Bezier eğrileri ile tarif edilmesi gerekmektedir.
Seçilen örnek çubuğun geometrisi Şekil 3.42 deki gibidir. Ek A.3 de verilen
çözümler ; ; değerleri için yapılmıştır. Çözümler
altıncı derece Bezier eğrileri ile yapılmıştır. Sonuçlar Çizelge 3.1 de özetlenmiştir.
Çizelge 3.1 : Eğri eksenli kiriş.
Eğri eksenli Kiriş
Derece P
Top
lam
İte
rasy
on
Bezier Sap2000
w u w u Fark%
w Fark%
u
3 10 17 156.18 -23.02 176.64 -37.96 11.58 39.36 4 10 25 185.09 -33.40 189.54 -40.29 2.35 17.09 5 10 27 197.78 -42.55 197.53 -41.95 -0.13 -1.44 6 10 31 202.65 -42.91 202.95 -43.11 0.15 0.48
7 10 35 206.81 -43.94 206.86 -43.98 0.02 0.09
3.2.8 Malzeme yaddoğrusallığı
Malzeme yaddoğrusallığının az sayıda sonlu elemanla modellenebilmesi için,
gerilme alanının büyük bir doğrulukla hesaplayabilmesi gerekmektedir. Klasik
düzlem gerilme elemanları düğüm noktası başına iki adet öteleme serbestliğine sahip
olup düzlem gerilme alanını az sayıda elemanla ifade etmekte zorlanmaktadırlar. Bu
çalışma kapsamında her düğüm noktasında iki öteleme ve bir de düzleme dik dönme
serbestliği bulunan özel bir sonlu elaman geliştirilmiştir.
Küçük yer değiştirme kabulü altında geliştirilen dört nodlu dikdörtgen sonlu
elemanın, Von-Misses akma kriteri uyarınca plastikleşmesi incelenmiş ve örnek
/2

73
problemler çözülerek teorik çözümler ve ticari sonlu eleman paket programları
çözümleri ile kıyaslamalar sunulmuştur.
3.2.8.1 Düzlem gerilme elemanı
Düzlem elemanlarda oluşan yer değiştirme alanı yaklaşım fonksiyonları yardımı ile
nodal büyüklükler cinsinden (3.159) daki gibi ifade edilebilir. Yaddoğrusal hesap
sözkonusu olduğu üzere artımsal büyüklükler kullanılmıştır.
u
L i i
v
L i i
u U
v V
(3.159)
Burada nodal yer değiştirme artımları büyük harfle gösterilmiştir. ―L‖ alt indisi
öteleme kaynaklı yer değiştirme alanını göstermektedir. Düğüm noktalarında
düzleme dik dönmeler olması halinde bu dönmelerden kaynaklanacak olan yer
değiştirme alanı (3.160) ile tariflenmiş ve (3.159) ifadeleri ile süperpoze edilerek yer
değiştirme alanı elde edilmiştir.
u
T i i
v
T i i
u T
v T
(3.160)
Toplam yer değiştirme alanı
L T
L T
u u u
v v v
(3.161)
şeklinde yazılabilir. Öteleme ve dönme yer değiştirme alanları Şekil 3.43 de
gösterilmiştir.
ġekil 3.43 : Bir nolu düğüm noktasında yer değiştirme alanları.
Küçük şekil değiştirmeler, yer değiştirme alanı yardımıyla
1T
1V 1T
1U

74
x
y
xy
u
x
v
y
u v
y x
Δε (3.162)
hesaplanabilir. Nodal büyüklükler türünden genlemeler
TΔε = B ΔU (3.163)
şeklinde yazılır. Malzeme bakımından yaddoğrusal hesap için teğetsel bünye matrisi
kullanılarak gerilme artımı
T
T TΔζ C Δε C B ΔU (3.164)
şeklinde hesaplanabilir. Yayılı yük ve bünye kuvvetlerinin olmaması durumunda
Virtüel Yer Değiştirme teoreminin
i i
V
W dV P u T
δε ζ (3.165)
olduğu hatırlanarak (3.165) in yönsel türevi
V
D W dV T
Δu δε Δζ (3.166)
şeklinde alınabilir.
( ) 0W D W Δuu (3.167)
olmak üzere
i i
V V
dV P u dV T T
δε Δζ δε ζ (3.168)
yazılır ve
T Tδε = B (3.169)
olduğu hatırlanarak (3.164) ve (3.169) ifadeleri (3.168) de yerlerine yazılırsa sonlu
elemanlar yapısı

75
V V
dV dV T
T EBC B ΔU R Bζ (3.170)
şeklinde elde edilmiş olur.
3.2.8.2 Doğrusal olmayan bünye bağıntısı
(3.164) ifadesinde ele alınan TC teğet bünye matrisi diferansiyel formda
d d Tζ C ε (3.171)
bağıntısını gerçeklemektedir. Akma yüzeyi içinde kalan gerilme durumları için teğet
bünye matrisi, elastik bünye matrisi olarak alınır. Fakat akma bölgesinde gerilme-
şekil değiştirme arasındaki ilişki malzeme sabitlerine ve gerilmenin büyüklüğüne
bağlı olarak değişmektedir. Akma yüzeyinde teğet bünye matrisini hesaplamak üzere
ilk önce akma yüzeyi tanımlanmalıdır. Genel formda akma yüzeyi pekleşme
olmaması durumunda
( ) ( ) 0YF ζ ζ (3.172)
şeklinde bir skaler fonksiyon olarak tanımlanır. Burada Y malzemenin akma
gerilmesine karşı gelmektedir. Akma yüzeyi dışında herhangi bir gerilme durumu
mevcut olamaz. Akma yüzeyi
( ) 0F ζ (3.173)
olacak şekilde belirlenir. 0F ise elastik hesap yürütülecek demektir. 0F
durumunda yani akma yüzeyi üzerindeki bir gerilme durumu için iki alternatif söz
konusudur. Birinci alternatifte yükleme ve plastik şekil değiştirme birikimi devam
eder. Bu durumda 0dF dır. Yani gerilme durumu akma yüzeyi üzerinde
hareketine devam etmektedir. İkinci alternatif ise boşalma durumudur. 0dF
olduğu bu durumda elastik boşalma söz konusu olacaktır. Özetle
0
00
0
F Elastik Hesap
dF Akma devamediyorF
dF Elastik boşalma
durumları söz konusu olabilir.

76
Akma fonksiyonu sadece sınır durumu belirlemektedir. Akma başladığı durumda
yükleme devam ederken gerilmelerin değişimini belirlemek için bir takım kabuller
yapmak gerekmektedir. Bu noktada iki önemli kabul söz konusudur. Birincisi toplam
şekil değiştirmenin elastik ve plastik şekil değiştirmelerin toplamı şeklinde iki
parçadan oluştuğudur.
e pd d d ε ε ε (3.174)
İkinci kabul ise plastik şekil değiştirmelerin bir gerilme potansiyelinden
türetilebileceğidir.
p Qd
ε
ζ (3.175)
Burada Q fonksiyonuna plastik potansiyei denir ve orantı sabitidir. Elastik
bölgede plastik şekil değiştirmeler olmadığından 0 dır. Burada plastik potansiyel
fonksiyonu malzeme yapısına göre özelleştirilebilir. Bu çalışma kapsamında plastik
potansiyeli akma fonksiyonuna eşit alınmıştır.
F Q (3.176)
Gerilmedeki artışın elastik şekil değiştirmeden kaynaklandığı göz önüne alınırsa
ed dζ C ε (3.177)
eşitliği yazılabilir. Gerilme artımını toplam şekil değiştirme cinsinden ifade etmek
üzere (3.174) bağıntısı (3.177) de yerine yazılırsa
( )pd d d ζ C ε ε (3.178)
olmaktadır. Akma durumunda yüklemenin devam etmesi halinde 0dF koşulu
geçerlidir.
0
TF
dF d
ζζ
(3.179)
şeklinde yazılarak (3.175) ve (3.178) ifadeleri (3.179) da yerlerine yazılırsa
( ) ( ) 0
T T
pF F FdF d d d
C ε ε C ε
ζ ζ ζ (3.180)

77
denklemi elde edilir. Bu denklemden çözülürek
T
T
Fd
F F
C εζ
Cζ ζ
(3.181)
şeklinde hesaplanır. Plastik durumda yüklemenin devam etmesi halinde plastik şekil
değiştirmeler (3.175) den hesaplanabilir. Nihai olarak akma yüzeyinde gerilmelerin
değişimi (3.178) den hesaplanabilir.
Alternatif olarak ifadesi (3.178) de yerine yazılarak işlemler yürütülürse
( )d d d p Tζ C C ε C ε (3.182)
şeklinde de yazılabilir. Burada pC matrisi
T
T
F F
F F
p
C Cζ ζ
C
Cζ ζ
(3.183)
ile tanımlanmıştır.
3.2.8.3 Hesap algoritması
Hesaplar (3.170) denklem takımının uygun biçimde oluşturulması esasına dayanır.
Burada her gauss noktasında plastikleşme kontrolü yapılarak elastik ve plastik durum
göz önünde bulundurularak her adımda uygun teğet bünye matrisinin oluşturulması
gerekmektedir. Denklem takımı çözülerek yer değiştirme artımları elde edilir.
Buradan şekil değiştirme artımları ve nihayet gerilme artımları hesaplanarak iç
kuvvet vektörü bulunur ve denge sağlanana dek ardışık yaklaşıma devam edilir. Ara
işlemlerle ilgili detaylı açıklama verilmiştir.
1. Artımsal şekil değiştirmelerin hesabı için başlangıçta doğrusal davranış kabulü
yapılır ve bulunan gerilme artışı bir önceki adım gerilmesi ile toplanarak s gerilmesi
hesaplanır.
s C ε
s ζ s (3.184)

78
2. ( )F s akma fonksiyonu hesaplanarak Gauss noktasının bir önceki adımdaki
durumuna göre iki farklı yol izlenir. Eğer bir önceki adımda gauss noktası elastik
durumda ise 3. adımdan devam edirlir. Eğer bir önceki adımda gauss noktasında
akma gerçekleşmiş ise 4. adımdan hesaba devam edilir.
3. Elastik durumdaki gauss noktası için iki alternatif durum söz konusudur.
a) Eğer ( ) 0F s ise gauss noktası elastik kalacaktır. Burada yeniζ s olarak
alınır.
b) Eğer ( ) 0F s ise akma gerçekleşecek demektir. İlk önce s gerilmesinin
akma yüzeyi üzerine taşınması gerekmektedir. Bu işlem için
( ) 0F ζ s (3.185)
yaddoğrusal denklemi çözülmelidir. (3.185) nin çözümü için ayrıntılı bilgi ―Akma
yüzeyine taşınma‖ başlığı altında verilmiştir. hesaplandıktan sonra geriye kalan
(1 ) ε şekil değiştirmesi sonucu oluşan gerilmeler gesaplanmalıdır (Şekil 3.44).
4. Bir önceki adımda akma gerçekleşmiş bir gauss noktası için iki alternatif durum
söz konusudur.
a) 0
TF
F
sζ
ise akma devam edecektir ve hesaba 3b adımından devam
edilir.
b) 0
TF
F
sζ
ise elastik geri yükleme gerçekleşmiştir. Bu noktada iki farklı
durum söz konusu olabilir
i) ( ) 0F s ise elastik geri yükleme gerçekleşmiş ve nokta elastik bölgede
kalmış demektir. yeniζ s olarak hesaplanabilir.
ii) ( ) 0F s ise elastik geri yükleme gerçekleşmiş ve hemen akabinde plastik
bölgeye tekrar geçilmiş demektir. Bu durumda hesaba 3b adımından devam
edilir.

79
ġekil 3.44 : Gerilmenin akma yüzeyine taşınması ve elasto plastik gerilmelerin
hesaplanması.
3.2.8.4 Akma yüzeyine taĢınma
Gerilmelerin akma yüzeyine taşınması için (3.185) denkleminin sağlanması
gerekmektedir. Akma yüzeyinin nın fonksiyonu olduğu düşünülerek Şekil 3.45
deki noktalar göz önünde bulundurulursa
ġekil 3.45 : Akma fonksiyonun ya bağlı noktasal değerleri.
aşağıdaki ilerleme şeması kurulabilir.
11
1
( ) 0i ii i i
i i
F FF
(3.186)
Buradan 1i hesaplanırsa
F
1i i
1i
1( )iF ζ s ( )iF ζ s
1( )iF ζ s
Elastik
bölge
ζ
2
s
s
yeniζ

80
1
1
( )ii i i i
i i
F
F F
(3.187)
şeklinde bulunur. Burada başlangıç için
1 0
1
i
i
(3.188)
alınabilir.
3.2.8.5 Elasto-plastik gerilmelerin hesaplanması
Gerilme durumunu akma bölgesine taşıdıktan sonra arta kalan (1 ) ε şekil
değiştirmelerinden oluşan yeni gerilme durumunu bulmak üzere aşağıdaki yöntem
izlenebilir. Bu noktadan itibaren doğrusal olmayan bünye bağıntısı geçerlidir. Basitçe
artık şekil değiştirmeyi N adet parçaya bölüp bu şekil değiştirme artımlarından
oluşacak gerilme artımları bulunabilir.
(1 )d
N
εe (3.189)
gerilmenin bir önceki değeri bilindiği üzere yeni değerler kolaylıkla hesaplanabilir.
T
ii T
i i
Fd
F F
C eζ
Cζ ζ
(3.190)
1i i i
i
Fd
ζ ζ C e
ζ (3.191)
Bu yöntem oldukça basit olmasına karşın hata biriktirme olasılığı vardır. Ayrıca
adım sayısının ne olması gerektiği konusunda herhangi bişey söylenemez.
Hesaplarda adım sayısı 10N olarak seçilmiştir. Ayrıca son adımda bulunan
gerilmelerin akma yüzeyinde olması garanti edilemez. Bu konuyla ilgili olarak
alternatif yöntemler tez kapsamında incelenmemiştir.
3.2.8.6 Örnek
Örnek problem olarak konsol kirişim çevrimsel ideal elasto-plastik davranışı ele
alınmıştır (Şekil 3.46).

81
Genişlik : 60 cm
Yükseklik : 6 cm
Kalınlık : 1 cm
Akma Gerilmesi : 22 kN/cm2
Elastisite Modülü : 20000 kN/cm2
Akma Yükü : Py =2.2 kN
Teorik En Büyük Yük : Pu : 3.3 kN
ġekil 3.46: Konsol kiriş boyutlar ve yükleme.
Şekil 3.47 de plastikleşme hesaplarda belirlenen plastikleşme bölgesinin şekli
verilmiştir. Çubuk teorisi gereğince düşünülenin aksine ankastre mesnet noktasının
merkezinde plastikleşme oluşmamaktadır. Şekil 3.47 den anlaşıldığı üzere tüm
kesitin plastikleşmesi durumu ankastre mesnetin biraz ötesinde gerçekleşecektir.
ġekil 3.47: P = 3.3 kN değeri için 10 kat büyütülmüş yer değiştirmeler ve
plastikleşme bölgesi.
Şekil 3.48 de verilen grafikte konsol kirişin bilinen plastikleşme davranışına ait yük –
yer değiştirme grafiği verilmiştir.
60cm
6cm
P

82
ġekil 3.48: Çevrimsel yükleme davranışı (konsol serbest uç yer değiştirmesi esas
alınmıştır).

83
4. BÜYÜK YER DEĞĠġTĠRME YAPAN ÇUBUK SĠSTEMLERĠN DĠNAMĠK
ANALĠZĠ
4.1 Ġntegrasyon Yönteminin Seçimi
Yapı sistemlerini dinamik analizini yapmak üzere doğrudan integrasyon yöntemi
tercih edilmiştir. Bu yöntemde, ele alınan sistemin seçilen küçük zaman aralıklarında
statik yükleme altında olduğu düşünülmekte ve zaman üzerinde denklemler integre
edilerek ilerlenmektedir. Bu noktada denge denklemlerinin zaman aralığının hangi
bölgesinde sağlanması gerektiği sorusu ortaya çıkmaktadır. Sistem denge
denklemleri belirlenen zaman aralığının başında sağlatılıyor ise ilerleme şeması açık
(explicit), diğer herhangi bir noktada sağlatılıyor ise örtülü (implicit) olmaktadır.
Her iki durumda da zamanda ilerlemek söz konusudur ancak açık şema
kullanıldığında hesap zaman adımında iteratif çözüm yapmaya gerek kalmamaktadır.
Ancak açık şemaların en önemli dez avantajı seçilmesi gereken zaman aralığının
örtülü şemalara göre daha küçük olması ve seçilen her zaman aralığı için stabil
çözüm üretememeleridir. Buna karşılık örtülü şemalar hesap zaman aralığında
iterasyon gerektirmelerine karşın daha büyük zaman aralıklarında stabil sonuçlar
vermektedirler. Tez kapsamında her iki durum için de çözümler sunulmuştur.
4.2 Dinamik Denge Denklemi
Büyük yer değiştirme yapan sisteme ait genel yönetici denklem
( ) ( ( )) ( )t t t Mx k x p (4.1)
şeklinde yazılabilir. Burada M kütle matrisidir. ( ( ))tk x ise yaddoğrusal sisteme ait
iç yük vektörüdür. ( )tp zamana bağlı dış yükleri göstermektedir. Zamana göre
türevler nokta ile gösterilmiştir. Analizler yapılırken tez kapsamında geliştirilen
elemanlara ait iç yük vektörleri (denge denklemleri) aynen kullanılacaktır.
Bu noktada kütle matrisinin oluşturulması büyük önem taşır. Kütlelerin sistem
düğüm noktalarında yoğunlaştığı düşünüldüğünde, kütle matrisi diagonal olmaktadır

84
ve analizler oldukça kolaylaşacaktır. Ancak ilgili elemanın gerçek dinamik tepkisini
ortaya koymak için kütlenin yayılı olduğu düşünülmelidir.
4.3 Açık Dinamik Analiz
4.3.1 Doğrusal ivme kabulü
Belirli bir t zaman aralığında sistem ivmesinin doğrusal değiştiği düşünülürse ivme
vektörü
t i i
x x x (4.2)
şeklinde yazılabilir. Burada i indisi ilgili büyüklüğün herhangi bir it zamanındaki
değerini ifade etmektedir. ise zamanı göstermekte olup t zaman aralığında
dolaşabilmek için
0t t t i (4.3)
şeklinde tanımlanmıştır. Dikkat edilirse (4.2) ifadesinde sadece it anındaki
büyüklükler kullanılmıştır. Bu durum ilerleme şemasının açık olmasını sağlayacaktır.
Konum vektörünün zamana göre 3. türevini elde etmek için (4.1) ifadesinin zamana
göre türevi alınarak
( )
-1 ii i i
kx M p x
x (4.4)
elde edilebilir. Bu noktadan itibaren (4.2) ifadesi t aralığında integre edilerek
ilerleme şeması kolaylıkla oluşturulabilir. 1it
anındaki nodal hız vektörü
2
2t
i i ix x x x
(4.5a)
2
2
tt
i+1 i i ix x x x
(4.5b)
şeklinde hesaplanabilir. (4.5a) integre edilerek t yerine yazıldığında
2 3
2 6
t tt
i+1 i i i ix x x x x (4.6)

85
1it zamanına ait tüm bilinmeyenler hesaplanmış olur. (4.5) ve (4.6) ifadelerinde ivme
terimlerini hesaplamak için yine (4.1) denkleminden faydalanılabilir.
-1
i i ix = M (p -k ) (4.7)
Son olarak (4.4) de dış yükün zamana göre türevini merkez farklar kullanılarak
2 t
i+1 i-1i
p pp (4.8)
şeklinde hesaplamak mümkündür. (4.4) ifadesinde iç yük vektörünün konum
vektörlerine göre türevi teğet rijitlik matrisini verecektir.
4.3.2 Sabit ivme kabulü
İvme bileşenlerinin t boyunca sabit olduğu varsayılarak daha hızlı bir ilerleme
şeması oluşturulabilir.
t ix x (4.9)
Nodal hız ve konum bileşenleri
t i+1 i i
x x x (4.10a)
2
2
tt
i+1 i i ix x x x
(4.10b)
şeklinde hesaplanacaktır. Bu şemanın en önemli avantajı ilerleme esnasında teğet
rijitlik matrisi hesabına ihtiyaç duymamasıdır. (4.10) da ivme terimlerini hesaplamak
için (4.7) ifadesi kullanılabilir.
Görüldüğü üzere açık şemalar kullanıldığında ilerleme için denklem takımı çözmeye
gerek kalmamaktadır. Duruma göre sisteme ait iç yük vektörünü ve teğet rijitlik
matrisini her t adım aralığı için güncellemek yeterli olmaktadır. Denklem
takımlarının çözümü hesap zamanının büyük bir kısmını oluşturmaktadır. Açık
şemaların denklem takımı çözümü gerektirmemesi hızlı oldukları anlamına gelmez.
Kapalı şemalara göre oldukça küçük zaman adımlarında stabil ve doğru çözüm
üretebilmektedirler.

86
Açık ilerleme şemalarında çeşitli düzenlemeler yapmak mümkündür. Bu
düzenlemeler ile şema stabilitesi arttırılabilir. Örneğin (4.10b) ifadesinde it anındaki
hız yerine ortalama hız kullanıldığında
21( )
2 2
tt
i+1 i i i+1 ix x x x x
(4.11)
şekline dönüşür ve bu şema ilk haline göre çok daha stabildir. Benzer düzenleme
doğrusal ivme kabulü için de uygulanabilir.
4.4 Kapalı Dinamik Analiz
Açık dinamik analizden farklı olarak ivme vektörü
tt
i+1 ii
x xx x
(4.12)
t t zamanına ait büyüklükler de kullanılarak yazılabilir. (4.12) de doğrusal ivme
kabulü yapılmıştır. Hız vektörü
2
2t
t
i+1 ii i
x xx x x
(4.13)
şeklinde yazılabilir. t t zamanına ait hız vektörü
2t
i i+1
i+1 i
x xx x
(4.14)
şeklinde elde edilir. Daha genel bir yaklaşım olması için (4.12) ivme teriminde
belirlenen ivme eğimi bir katsayı ile çarpılarak değiştirilebilir.
2tt
i+1 ii
x xx x
(4.15)
Bu durumda elde edilen ivme fonksiyonu genelleştirilmiş olur. Bu yöntemi ilk kez
Newmark kullanmıştır. Bu durumda t t zamanına ait hız vektörü
((1 ) ) t i+1 i i i+1
x x x x (4.16)
şekline dönüşür. 0.5 için doğrusal ivme kabulü elde edilmiş olur. (4.13) ifadesi
integre edilerek t t anındaki konum vektörü

87
2 3
2 6t
t
i+1 ii i i
x xx x x x
(4.17a)
21 1 1(( ) )
2 6 6t t i+1 i i i i+1x x x x x
(4.17a)
şeklinde hesaplanabilir. Yine genel bir yaklaşım bulmak üzere ivme vektörü
3tt
i+1 ii
x xx x
(4.18)
şeklinde ikinci bir parametre ile tanımlanıp konum vektörü
2((0.5 ) )t t i+1 i i i i+1x x x x x (4.19)
olarak da elde edilebilir. 1/ 6 için doğrusal ivme yöntemi elde edilecektir. (4.19)
ifadesi yine Newmark ‗ın önerdiği bir ifadedir. Dinamik analiz şemasını
ilerletebilmek için (4.19) ifadesindeki ivme terimi
.( ) -1
i+1 i+1 i+1x M p k (4.20a)
şeklinde yerine yazılarak ilerleme şeması
2((0.5 ) ) .( )t t i+1 i i i i+1 i+1x x x x M p k (4.20b)
elde edilir. Burada
2t -1M M (4.21)
şeklinde tanımlanmıştır. (4.20b) denkleminde bilinmeyen büyüklükler mevcuttur.
Ayrıca denklem doğrusal olmayan türdendir. (4.20b) denkleminde t süresi
boyunca sabit büyüklükler bir tarafa toplanır ve yeniden yazılırsa
2. ((0.5 ) ) .t t i+1 i+1 i i i i+1M k x x x x M p (4.22)
elde edilir. (4.22) yaddoğrusal denklem takımı Newton-Raphson yöntemi ile
çözülerek şemada ilerlemek mümkündür. Bu durumda
( . ). ( . ) MK I Δx q x Mk (4.23a)
2((0.5 ) ) .t t i i i i+1q x x x M p (4.23b)

88
doğrusal denklem takımı oluşmaktadır. Hız vektörünü güncellemek için (4.16)
ifadesi kullanılmalıdır.
4.5 Kütle Matrisinin Elde Edilmesi
Sistem kütle matrisini elde etmek üzere elastik eğriye ait şekil değiştirmiş konum
koordinatlarında yönetici diferansiyel denklem yazılacaktır. Hesapları basitleştirmek
için elemana ait elastik eğrinin şekil değiştirmiş eksen takımına bağıl olarak küçük
yer değiştirme yaptığı düşünülecektir. Bu durumda şekil değiştirmiş eksen takımı
parametreleri kullanılarak doğrusal bir yönetici denklem yazılabilir. Kesit rijitliği
sabit olduğu durum için yönetici denklem
4 2
4 2
m mv vEI q
x t
(4.24)
olacaktır. Burada birim boyun kütlesini ifade etmektedir. 4.24 denkleminde
klasik sonlu elemanlar işlemleri uygulandığıda dördüncü türevli terim iç yük
vektörünü, zamana göre ikinci türevli terim ise atalet terimlerini içeren vektörü
verecektir. Daha önceki bölümlerde iç yük vektörü daha genel bir biçimde
hesaplandığı üzere burada sadece atalet terimlerini içeren ifadeler elde edilmeye
çalışılacaktır. Bunun için elastik eğriye ait ivme fonksiyonu ve elastik eğri yaklaşım
fonksiyonları ile ifade edilmelidir.
2
2
mi i
vu
t
(4.25a)
m i iv u (4.25b)
Burada iu ler elemana ait uç deplasmanları göstermektedir. Virtüel İş Teoremi
uyarınca kütle matrisi terimleri
0
L
mi m
i
vW v dx
u
(4.26a)
iij
j
WM
u
(4.26b)

89
şeklinde elde edilebilir. Yaklaşım fonksiyonları kübik Hermit fonksiyonları olarak
seçildiğinde yerel eksen takımındaki kütle matrisi
2 2
2 2
156 22 54 13
22 4 13 3
54 13 156 22420
13 3 22 4
L L
L L L LL
L L
L L L L
LM
(4.27)
şeklinde hesaplanabilir. Normal doğrultudaki atalet terimleri hesap yapmaya gerek
olmadan 0.5 L olarak eklenebilir. Son adımda yerel eksen takımındaki büyüklükler
global eksen takımına
0 0 0 0
0 0 0 0
0 0 1 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0 0 1
Cos Sin
Sin Cos
Cos Sin
Sin Cos
T
(4.28)
dönüşüm matrisi kullanılarak
T
LM T .M .T (4.29)
ile dönüştürülerek kullanılmıştır.
4.6 Örnek Problemler
4.6.1 Örnek 1
Şekil 4.1 deki konsol kirişin Şekil 4.2 de verilen ani yüklemenin etkisi altında zaman
tanım alanında uç noktasının düşey yer değiştirme ve hız grafikleri verilmiştir.
ġekil 4.1 : Konsol kiriş örneği.
1000L
P
34560000
Kiriş Kesiti
5
5
0.01L
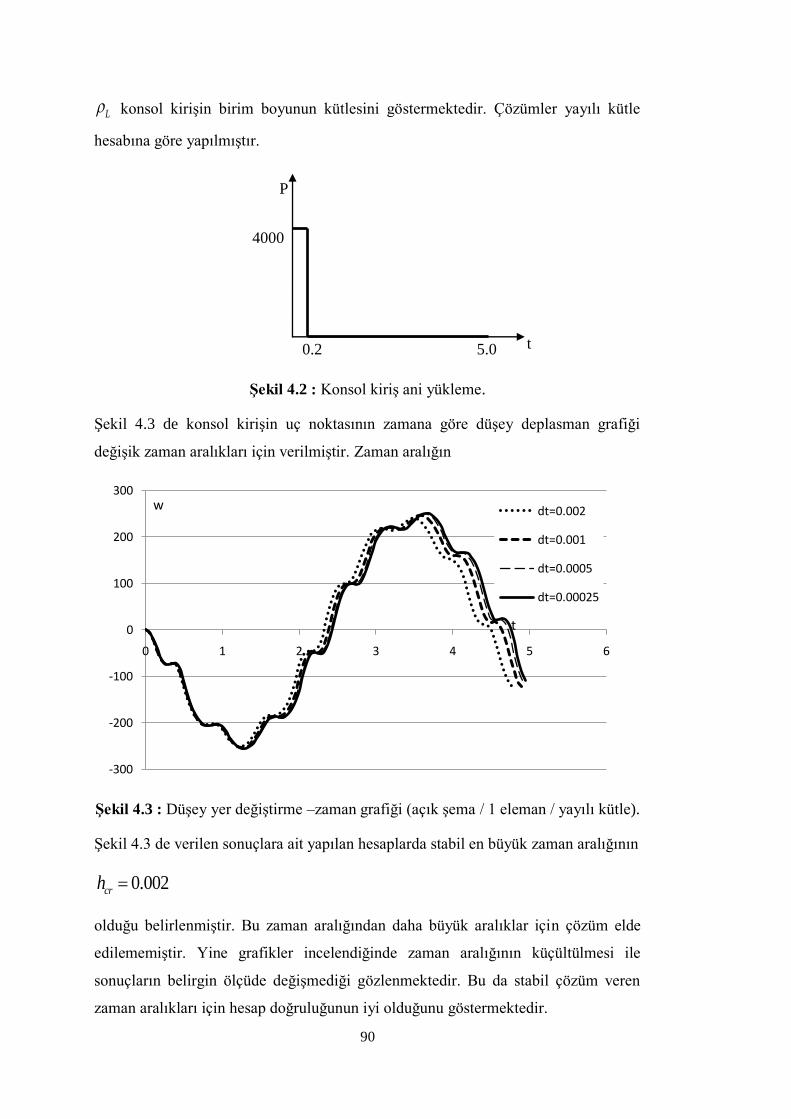
90
L konsol kirişin birim boyunun kütlesini göstermektedir. Çözümler yayılı kütle
hesabına göre yapılmıştır.
ġekil 4.2 : Konsol kiriş ani yükleme.
Şekil 4.3 de konsol kirişin uç noktasının zamana göre düşey deplasman grafiği
değişik zaman aralıkları için verilmiştir. Zaman aralığın
ġekil 4.3 : Düşey yer değiştirme –zaman grafiği (açık şema / 1 eleman / yayılı kütle).
Şekil 4.3 de verilen sonuçlara ait yapılan hesaplarda stabil en büyük zaman aralığının
0.002crh
olduğu belirlenmiştir. Bu zaman aralığından daha büyük aralıklar için çözüm elde
edilememiştir. Yine grafikler incelendiğinde zaman aralığının küçültülmesi ile
sonuçların belirgin ölçüde değişmediği gözlenmektedir. Bu da stabil çözüm veren
zaman aralıkları için hesap doğruluğunun iyi olduğunu göstermektedir.
-300
-200
-100
0
100
200
300
0 1 2 3 4 5 6
dt=0.002
dt=0.001
dt=0.0005
dt=0.00025
t
w
P
t
4000
0.2 5.0

91
Eleman sayılarına göre değişen dinamik davranış grafikleri Şekil 4.4 de verilmiştir.
ġekil 4.4 : Değişen eleman sayıları için dinamik davranış grafikleri (MyBeam).
Şekil 4.4 için yapılan hesaplamalarda 0.00025dt olarak seçilmiştir. Görüldüğü
üzere 2 ve 4 eleman için 8 elemanda elde edilen çözümlere oldukça iyi
yaklaşılmıştır.
Şekil 4.5 de Sap2000 ile yapılan karşılaştırmalar sunulmuştur.
ġekil 4.5 : Değişen eleman sayıları için dinamik davranış grafikleri (Sap2000).
Şekil 4.5 deki grafikler Şekil 4.4 ile karşılaştırıldığında tez kapsamında geliştirilen
MyBeam elemanının Sap2000 e göre oldukça iyi performans sergilediği
-300
-200
-100
0
100
200
300
0 1 2 3 4 5 6
1 Eleman
2 Eleman
4 Eleman
8 Eleman
t
w
-300
-200
-100
0
100
200
300
0 1 2 3 4 5 6
1 Eleman
2 Eleman
4 Eleman
8 Eleman
w
t

92
görülmektedir. Özellikle 1 ve 2 eleman ile yapılan çözümlerde dinamik davranış
karakteri Sap2000 in elemanına göre oldukça başarılı olduğu görülmektedir.
4.6.2 Örnek 2
ġekil 4.6 : Serbest çerçeve dinamik analizi.
Bu örnekte Şekil 4.6 da verilen sistemin Şekil 4.2 deki anlık yükleme altındaki
dinamik tepkisi çizimlerle gösterililecektir. Çerçeve herhangi bir noktasından
mesnetlenmemiştir. ―C‖ noktasından yapılan anlık yükleme sonucu oluşan yer
değiştime çizimleri Şekil 4.7 de verilmiştir. Çözümler 1x1 eleman için yapılmıştır.
ġekil 4.7 : Serbest çerçeve anlık yükleme.
Şekil 4.7 de elestik çerçevenin beklendiği üzere aşağıya doğru ötelenirken aynı
zamanda saat yönünde dönme hareketi yapmaktadır. Bu hareket esnasında çerçevede
oluşan elastik şekil değiştirmeler çizimlerden takip edilebilmektedir.
( )P t
,EI EA
,EI EA
L
L
A
B C
1000L
Kiriş Kesiti
5
5
43456 10E
0.01L

93
5. SONLU ELEMAN GELĠġTĠRME VE ANALĠZ ÇATISI (SEGAÇ)
Yapı sistemlerinin analizinde Sonlu Elemanlar Yönteminin (SEY) kullanımı
bilgisayar teknolojilerinin yükselmesi ile hızla yaygınlaşmıştır. Günümüzde SEY
çözümleri ile hesap yapan birçok paket program ve açık kaynak kodu geliştirilmiştir.
Paket programlar kullanıcıya, uzman teorisyenler tarafından oluşturulmuş birçok
sonlu eleman modeli ve bu elemanlardan oluşan sistemleri oluşturmak, çözmek ve
çözümleri değerlendirmek için güçlü araçlar sunmaktadır.
Bununla birlikte kendi sonlu elemanını geliştirmek ve paket programa dahil etmek
isteyen kullanıcılara (teorisyen kullanıcı) yönelik yapıları sunmakta yetersiz
kalmaktadırlar. Sonlu Eleman geliştiricileri teorilerini test etmek üzere bir
programlama dili öğrenerek, kendi programlarını yazmak veya mevcut açık kaynak
kodlarını çözümleyip değiştirmek zorunda kalmaktadırlar. Her iki durumda da
harcanacak emek ve zaman oldukça dikkate değerdir.
Bu çalışma kapsamında Sonlu Eleman Geliştirme ve Analiz Çatısı (SEGAÇ) adı
altında bahsedilen yöntemler, işaret edilen bu probleme çözüm üretmek amacıyla
geliştirilmiştir. SEGAÇ genel anlamda, Sonlu Eleman geliştiricilerine yardımcı
olmak üzere Nesne Yönelimli Programlama (NYP) teknikleri kullanılarak yazılmış
gelişkin araçlardan oluşan bir paket olarak algılanabilir. Bu paket
Rutin matematik ve SEY işlemlerini yürüten temel programlar
(FEMWORKS)
Kullanıcı özel sonlu eleman yaratmak üzere geliştirilmiş yeni bir
programlama dili (FEMLANG)
Kullanıcı elemanları ve SEGAÇ yapısını birleştiren bir geliştirme ortamı
(FEMBIND)
şeklinde üç ana bileşen içermektedir (Şekil 5.1).

94
ġekil 5.1 : SEGAÇ temel bileşenleri.
NYP teknikleri esas olarak nesne yapılarının tasarlanması ve oluşturulan nesne
yapıları arasındaki iletişimin kurulmasına dayanır. SEY kavramları olarak bilinen
―Düğüm Noktası‖, ―Eleman‖ ve ―Eleman Ağı‖ gibi yapıların her biri NYP de birer
nesne olarak tasarlanabilirler (Şekil 5.2).
ġekil 5.2 : Düğüm noktası nesnesi ve örnek kod yapısı
Nesneler çeşitli özellik ve yetenekleri olan canlı yapılar gibidir (Şekil 5.3). Nesne
içerisine tanımlanan özellikler çeşitli değerler alarak nesnenin anlık durumunu
belirler. Nesneler ayrıca işlem yapabilme yeteneğine de sahiptirler. Bu yeteneği
tanımlanan metotlar (komutlar) sayesinde kazanırlar. Nesne metotları nesne
özelliklerini kullanarak işlem yapar. Örneğin Şekil 5.2 deki ―Bağla‖ metodu, Düğüm
Noktası nesnenin sınır koşullarını değiştirme yeteneğine sahiptir.
Nesne : DüğümNoktası
Liste<Kartezyen> koord;
Liste<Değişken> değişliste;
Liste<Yük> yükliste;
Liste<SınırKoşulu> skliste;
Metot Güncelle
Metot Bağla
Düğüm Noktası Nesnesi
Koordinatlar
Değişkenler
Yükler
Sınır Koşulları
Güncelle
Bağla
FEMWORKS
Sonlu Eleman GeliĢtirme
ve
Analiz Çatısı
FEMLANG
FEMBIND

95
ġekil 5.3 : Nesne yapısı.
Nesne yetenekleri bunlarla sınırlı değildir. Aşağıda nesnelerin yapabildiği önemli
işlevler sıralanmıştır.
Farklı alt nesneleri barındırabilirler
Diğer nesnelerle durumları hakkında haberleşebilirler
Durum değişikliklerini sisteme anons edebilirler
Bir başka nesneye tüm özellik ve metotlarını aktarabilirler
Başka nesnelerden kazandıkları özellik ve metotları kendilerine göre
geliştirebilirler
NYP tekniklerini destekleyen herhangi bir programlama dilinde yaratılan nesneler
tüm bu işlevlere sahiptir. Bu işlevlerden son ikisi SEGAÇ‘ ın yaratılmasında kilit rol
oynamaktadır. Nesneler arasındaki bu ilişkiler sayesinde temel işlevleri
gerçekleştiren nesneler yazmak ve daha sonra bu işlevleri özelleştirecek yeni
nesneler tasarlamak mümkün olmaktadır. Şekil 5.4 de bir kafes sistem çubuğu ve bu
çubuklardan oluşan kafes sistemin oluşturulma adımları gösterilmiştir. Kullanıcı bu
adımlardan sadece FEMLANG bölümünde belirtilen yapıları bu dilin kurallarına
göre yazmak durumundadır. Bu bölümde yazılan tüm nesneler FEMWORKS
bölümünde daha önceden yazılmış olan temel nesnelerden tüm özellikleri miras
almaktadır. Miras alınan ve sonradan tanımlanan ek özelliklerle yeni nesneler
yaratılmış olur. Örnekte belirtilen kafes eleman ve kafes sistem tanımları bu şekilde
oluşturulmuştur. ―Kafes eleman‖, daha önceden yazılmış bir ―Eleman‖ nesnesinden
tüm özelliklerini miras almaktadır. Burada Eleman nesnesi standart sonlu eleman
işlemlerini yapmak üzere programlanmıştır. Kafes Eleman ise bir anlamda bu
işlemlerde kullanılacak verileri belirlemektedir. Böylece kullanıcı, standart sonlu
eleman işlemleri ile uğraşmak zorunda kalmayıp, sadece kendi yaratmak istediği
elemana özel verileri tasarlamakla yükümlü olacaktır.
Özellikler
NESNE
Metotlar

96
ġekil 5.4 : SEGAÇ‘ ın çalışma şekli.
5.1 Genel Sonlu Eleman Altyapısı (FEMWORKS)
Doğada bir çok nesne görüntü olarak farklı olsalar bile ortak birtakım özellik ve
davranışlar göstermektedirler. Programlama ortamında modellenmeye çalışılan
nesnelerin de ortak yönlerinin belirlenmesi oldukça önemlidir. Örneğin sonlu
elemanlar yönteminde elemanların
Serbestlik dereceleri
Denge denklemleri
Sistem global denklemine katkı yapmaları
Çeşitli matematik işlemleri yapabilme kapasiteleri
gibi bir çok ortak özellikleri vardır. Nesnelerin ortak özelliklerinin bire bir aynı
yapıda olmaları gerekmez. Örneğin her sonlu elemanın denge denklemleri farklıdır
fakat her sonlu elemanda denge denklemleri olmak zorundadır ve bu denklemler
belirli matematik işlemler sonucu oluşturularak bir vektör ile ifade edilebilirler. Yine
her sonlu eleman global bir denklem takımına kendi denklemleri ile katkı yapmak
durumundadır.
Çözücü
FEMLANG
Kafes
Eleman
Tüm Özelliklerini
Aktar
Kafes eleman oluştur
FEMBIND
Kafes sistem
oluştur
Eleman
FEMWORKS
Sistem
Tüm Özelliklerini
Aktar
Sistem
Bilgisi
Kafes
Eleman
Kafes
Sistem

97
FEMWORKS adı altında sunulan yapıda
Geliştirilecek sonlu elemanlar için ortak yapılar barındıran nesneler
Sistem denklem takımı oluşturmak için gerekli yapılar
İntegral ve türev gibi temel matematik işlemler için çeşitli araçlar
Yaddoğrusal denklem takımı çözmek için gerekli yapılar
bulunmaktadır. Bu bölümde bu yapıların işlevleri özet şekilde açıklanacaktır.
5.1.1 Düğüm noktası nesnesi (Node)
Düğüm noktaları ve serbestlik dereceleri sonlu eleman teorisinde önemli
kavramlardır. Düğüm noktaları uzayda belirli koordinatlarda tanımlanır. Sisteme ait
bilinmeyenler ve sınır koşulları düğüm noktalarında tanımlanır. Elemanlar, düğüm
noktaları arasındaki rijitlikler olarak düşünülebilir. Düğüm noktaları bir veya birden
fazla elemana ait olabilirler. Düğüm noktalarının ortak özellikleri aşağıdaki şekilde
belirlenmiştir.
Koordinatlar : , ,x y z
Serbestlik derecesi (Bilinmeyenlerin sayısı) : NDOF
Bilinmeyenler vektörü : [ ]v
Sınır koşulları vektörü (Tutulu olan serbestlikleri belirlemek için) : [ ]r
Nodal kuvvetler vektörü : [ ]f
Serbestlik numaraları vektörü : [ ]q
Kütle vektörü : [ ]m
Vektör büyüklükler [ ] şeklinde gösterilmiştir. Vektör boyutları düğüm noktasının
tipine göre değişebilir. Örneğin iki boyutlu bir kafes sistem düğüm noktasının iki
serbestliği (yatay ve düşey öteleme serbestlikleri) varken, iki boyutlu bir çerçeve
elemana ait düğüm noktasının üç adet serbestliği bulunmaktadır (Yatay-düşey
ötelemeler + dönme serbestliği). Tasarımlar bu şekilde soyut olmalıdır. Bir düğüm
noktasında olması gereken yapıların tipleri belirlidir fakat bu yapıların boyutları
belirli değildir. Burada tüm boyutlar NDOF ile verilen bilinmeyenlerin sayısına
bağlıdır. Şekil 5.5 de örnek bir kafes sisteme ait düğüm noktalarında tanımlanan
yapılar gösterilmektedir.

98
ġekil 5.5 : Düğüm noktalarında tanımlanan yapılar.
Bir düğüm noktasındaki bilinmeyenlerin başlangıç değerlerinin belirlenmesi
önemlidir. Bu yüzden her düğüm noktası için ―SetInitialParameters‖ (Başlangıç
parametrelerini ver) adlı bir metot tanımlanmıştır. Bu metot [ ]v vektörünün ilk
değerini belirlemek üzere kullanılmalıdır. Seçilen düğüm noktası bilinmeyenleri sıfır
ile başlıyor ise metodu kullanmaya gerek yoktur.
Yaddoğrusal hesaplamalarda iterasyon esnasında düğüm noktalarındaki
bilinmeyenlerin değerleri yeniden hesaplanıp güncellenmek durumundadır. Bunun
için düğüm noktalarında ―Update‖ (güncelle) adlı bir metot tanımlanmıştır. Yine
güncellenen degişkenler düğüm noktasının belirli özelliklerini yeniden
belirleyebilmektedir. Örneğin yer değiştirme tipinden bir değişkenin değeri
değiştiğinde düğüm noktasının koordinatlarının da değiştirilmesi gerekir. Bu tip
işlemlerin tanımlanabilmeleri için ―SetUpdatedParameters‖ isimli metot
tanımlanmıştır.
[0] 1
[1] 1
r
r
[1] 1r
15 20
[0] 15f [1] 20f
0q
1q
2q
3q
4q
7q
8q
5q
6q
9q
10q

99
Bu metotlar FEMWORKS deki diğer nesneler tarafından kullanılmaktadırlar.
Sistemin doğru işlemesi gerekli metotlardır. Bunların yanında ikinci derece öneme
sahip metotlar da mevcuttur. Örneğin bazı hızlı sınır koşulu metotları son kullanıcıya
kolaylık sağlayacaktır. Bir düğüm noktasındaki tüm serbestliklerin tutulu olmasını
sağlamak üzere ―RestraintAllDOF‖ (Tüm serbestlikleri kısıtla) isimli bir metot bu
işlevi yerine getirmektedir. Bu tip metotlar FEMWORKS ün genel yapısında
değişikliğe sebep olmadan yeni versiyonlarda sistemden kaldırılabilir veya yenileri
eklenebilir.
Bir düğüm noktası nesnesinin görüntüsü Şekil 5.6 daki gibidir.
ġekil 5.6 : Düğüm noktası nesnesi yapısı.
5.1.2 Eleman nesnesi (Element)
FEMWORKS içerisindeki en kapsamlı nesne eleman nesnesidir. Eleman türünden
nesnelerin ortak yapıları aşağıda özetlenmiştir.
Düğüm noktası listesi : Collection Node
Elemana ait bilinmeyenlerin isimleri : VarNames

100
Kesit ve malzeme özellikleri : Secpro
Elemana ait bilinmeyenlerin sistemdeki numaraları : CodeVector
Sistem matris ve vektörlerine katkı : AddToSystemMatrix
Denge denklemleri vektörü : [ ]q
Teğet rijitlik matrisi : [ , ]KT
Sistem içinde elemanı tanımlayan en önemli şey elemana ait düğüm noktalarıdır. Bu
yüzden her eleman bir düğüm noktası listesine sahiptir (Collection<Node>). Yine her
eleman için kesit ve malzeme özelliklerini belirlemek üzere tanımlanmış ―SecProp‖
(kesit özellikleri) nesnesi tanımlanmalıdır. Düğüm noktaları ve kesit özellikleri
eleman içerisinde nesne adresleri olarak tutulurlar. Böylece daha önceden
tanımlanmış düğüm noktaları ve kesit nesneleri bir çok eleman tarafından
paylaşılabilir.
Elemana atanan düğüm noktaları elemandaki bilinmeyen sayılarını otomatik olarak
belirler. Böylece hesap esnasında eleman matrislerinin boyutları ortaya çıkmış olur.
Eleman nesnesinin en temel özelliği birleştirme sürecince sistem denklemlerine
kendi denklemlerinden katkıda bulunmasıdır. Bu işlemleri ―AddToSystemMatrix‖ ve
―AddToSystemVector‖ adlı metotlar yerine getirmektedirler. Tabi birleştirme işlemi
yapabilmeleri için elemana ait düğüm noktalarının serbestlik numaralarından oluşan
bir ―kod vectörü‖ ne (CodeVector) ihtiyaç vardır. Kod vektörü eleman
denklemlerinin sistem denklemleri içersindeki yerlerini belirler.
FEMWORKS içerisinde tanımlı elemanlar yaddoğrusal hesap yapmak üzere özel
olarak tasarlanmıştır. Sistem çözümü için Newton-Raphson metodu kullanıldığı
üzere yaddoğrusal denklemlerin doğrusallaştırılması gerekmektedir. Her eleman
denge denklemleri sağlamalıdır. Denklemler eleman tipine göre değişse de bu
denklemler üzerinde yapılacak doğrusallaştırma işlemleri ortaktır. Bunun için de
elemana ait bilinmeyenlerin bulunduğu denklemleri bu bilinmeyenlere göre kısmi
türevleri alınmalıdır. Eleman nesnesi bu işlemleri otomatik olarak
gerçekleştirmektedir. Yani her eleman kendi yaddoğrusal denklem takımını
doğrusallaştırmaktadır. Bunun için her eleman ―DifferantiableVector‖
(Türevlenebilir vectör) nesnesinden türetilmiştir. Eleman denklemleri bir vektör
formunda olduğu üzere bu vektörün bilinmeyenlere göre kısmi türevlerinden oluşan
matrise ―teğet rijitlik matrisi‖ denir.

101
Şekil 5.7 de görüldüğü üzere temel eleman nesnesi üç aşamada tanımlıdır. İlk önce
―Differantiable‖ adlı nesne ―SetVar‖ ve ―GetVar‖ adlı metotları sayesinde elemana
ait bilinmeyenleri okuyabilecek ve değiştirebilecek şekilde tasarlanmıştır.
Bilinmeyenlerin isimleri ―VarNames‖ değişkenin de tutulur. VarNames değişkeni bir
kelime listesidir. Örneğin iki boyutlu bir kafes elemanın bilinmeyenleri
[―u1‖,‖w1‖,‖u2‖,‖w2‖] şeklinde isimlendirilebilir. Bu isimler elemana ait düğüm
noktalarındaki bilinmeyenleri tutan [ ]v vektörünün bileşenlerine karşı
gelmektedirler. Bu bağlantı her eleman için otomatik olarak kurulmaktadır. Verilen
isimler tanımlanan düğüm noktalarında tanımlanma sırasına göre eşleştirilmektedir.
Örneğin iki düğüm noktalı kafes eleman için
1. Düğüm noktası [0]v ‖u1‖
1. Düğüm noktası [1]v ‖w1‖
2. Düğüm noktası [0]v ‖u2‖
2. Düğüm noktası [1]v ‖w2‖
şeklinde eşleme olacaktır. İsimlendirmede sıralama düğüm noktası serbestlik sayısı
ve elemana atanan düğüm noktalarının sırası ile belirlenmektedir. Elemanın ilk
düğüm noktasının ilk serbestliği VarNames listesinden ilk isimle eşlenmektedir. Yine
ilgili düğüm noktasının diğer serbestlikleri sırayla listedeki diğer isimlerle
eşleşmektedir. İlk düğüm noktasının tüm serbestlikleri eşlendikten sonra diğer
düğüm noktalarına ait serbestlikler de benzer şekilde listedeki diğer isimlerle
eşleştirilmektedirler. Düğüm noktası bilinmeyenlerine isim vermek, hesaplamalar
esnasında yapılan işlemleri ve analiz sonuçlarını değerlendirmeyi oldukça
kolaylaştırmaktadır.
Eleman nesnesi, içerisinde tanımlanan herhangi bir fonksiyonun, düğüm noktası
bilinmeyenlerine göre kısmi türevlerini hesaplayabilmektedirt. Bunun için
―DifferantiableVector‖ adında bir nesneden türetilerek oluşturulmuştur. Bu nesne
eleman içerisinde tanımlı herhangi bir fonksiyonlar vektörünün, yine tanımlanan
değişkenlere göre kısmi türevlerini alarak gradyan matrisini oluşturmaktadır.
Fonksiyonlar vektörü denge denklemlerine karşı gelen iç yük vektörü olduğu zaman
oluşturulan bu matris sonlu elemanlar için teğet rijitlik matrisi adını almaktadır.
Türetme işlemleri ―D‖ metodu tarafından merkez farklar kullanılarak sayısal olarak

102
gerçekleştirilmektedir. Bu nesnedeki ―FunctionDefinition‖ özelliği türevi alınacak
olan fonksiyonlar vektörünü belirlemektedir.
ġekil 5.7 : Eleman nesnesi.

103
Son olarak ―Element‖ nesnesi ―q[]‖ vektörü ile sağlanan denge denklemlerinden ―kt‖
metodu ile teğet rijitlik matrisi oluşturma yeteneği kazanmış olur. Bunun için ―q[]‖
vektörünü türevi alınacak vektör olarak tanımlamak yeterlidir. Bu işem otomatik
olarak gerçekleşmektedir.
Görüldüğü üzere herhangi bir sonlu elemanın yaddoğrusal hesaplamalar için
barındırması gereken yapıları eleman nesnesi otomatik olarak oluşturabilmektedir.
Bu da yaratılacak yeni elemanlar için son kullanıcının sadece denge denklemleri ile
uğraşması kolaylığını getirmektedir.
5.1.3 Sonlu eleman yapı sisteminin oluĢturulması (Structure)
Tanımlanan düğüm noktaları, elemanlar ve sınır koşulları bir sistem olarak
düşünülebilir. Sisteme ait tüm nesnelerin adreslerini tutan ve bunlarla ilgili çeşitli
bilgilere erişim sağlayan nesne ―Structure‖ nesnesidir. Bu nesnenin temel yapıları
aşağıdaki gibidir.
Düğüm noktası listesi : nodes
Eleman listesi : elements
Düğüm noktası ekleme metodu : AddNode
Eleman ekleme metodu : AddElement
Sistem serbestliklerini belirleyen ve çözüme hazırlayan metot : Getready
―AddNode‖ ve ―AddElement‖ metotları sisteme eklenen düğüm noktaları ve
elemanların kontrollü bir şekilde eklenmeleri sağlamaktadır. Ayrıca ekleme
esnasında sistemin geometrik sınırları da otomatik olarak güncellenmektedir.
―GetReady‖ metodu sistemin çözüm aşamasına geçilmeden önce muhakkak
çalıştırılması gereken bir metotdur. Bu metot sınır koşullarına göre sistem
serbestliklerini numaralamakta ve sistemdeki bilinmeyenlerin sayısını
belirlemektedir.
Özetle structure nesnesi, hesaplanacak olan yapıya ait tüm bilgileri tutmakla ve
analiz aşamasına geçmeden önce yapılması gereken tüm işlemleri yerine getirmekle
yükümlüdür. Nesnenin genel görüntüsü Şekil 5.8 de verilmiştir.

104
ġekil 5.8 : Structure nesnesi.
5.1.4 Sistem denklem takımının oluĢturulması (FEMAssembler)
Her sistem (structure) çözüm aşamasında doğrusal veya yaddoğrusal bir denklem
takımına dönüşmektedir. Bu dönüşüm sistemde tanımlanmış tüm elemanların
denklemleri ile global sistem denklem takımına katkı yapması şeklinde olur.
―FEMAssembler‖ nesnesi bu görevi yerine getirmektedir. Nesnenin temel yapıları
aşağıdaki gibidir.
Birleştirilecek sistem nesnesi : structure
Global denge denklemleri : [ ]K
Global teğet rijitlik matrisi : [ , ]KT
Global dış yük vektörü : [ ]Q
Global sistem bilinmeyenleri vektörü : [ ]U
Global sistem kütle matrisi : [ , ]MassMatrix
Global denklem sayısı : N
Global değişkenleri güncelleme metodu : update
Düğüm noktaları, elemanları ve sınır koşulları belli olan bir sistemi global denklem
takımına dönüştürmek için, iterasyonun her adımında yeniden oluşturulan eleman

105
denklemleri, elemanların kod vektörlerinden yararlanılarak global sistem vektöründe
ilgili yerlerine eklenirler. Bu süreç sonucunda oluşturulan vektör ve matrisler sonraki
bölümde detayları verilen ―Solver‖ nesnesine verilerek çözüm gerçekleşecektir.
―FEMAssembler‖ ın genel görüntüsü Şekil 5.9 da verilmiştir.
ġekil 5.9 : FEMAssembler nesnesi.
5.1.5 Yaddoğrusal çözücü (Solver)
Yaddoğrusal çözüm için gerekli tüm denklemler FEMAssembler nesnesi tarafından
sağlanmaktadır. ―Solver‖ nesnesi bu denklemleri Newton-Raphson yöntemi ile
çözmek için gerekli metotları içermektedir. Nesnenin yapıları aşağıdaki gibidir.
Global denklem sağlayıcı : supplier
Doğrusal denklem takımı çözücü : SolL
Yaddoğrusal denklem çözücü : SolNL
―supplier‖ özelliği ―FEMAssembler‖ türündendir ve sistem denklem takımını içerir.
Diğer metotlar ise doğrusal veya yaddoğrusal çözümleri yapmaktadırlar. Nesnenin
genel görüntüsü Şekil 5.10 da verilmiştir.

106
ġekil 5.10 : Solver nesnesi.
5.2 Yeni Bir Sonlu Eleman Yaratma ve Çözümleme Dili (FEMLANG)
FEMWORKS sayesinde son kullanıcının
Yeni bir sonlu eleman türetmek
Bir yapı sistemi oluşturmak
Analiz yapmak
için harcayacağı emek büyük ölçüde azalmaktadır. Yeni bir eleman yaratmak için ilk
adım elemanın serbestlik tipini belirleyen yeni bir düğüm noktası nesnesi
yaratmaktır. Bu nesne de ―Node‖ nesnesinden miras alınarak oluşturulur. İlgili nodun
bilinmeyenlerinin sayısını ve başlangıç değerlerinin vermek yeterli olacaktır.
Sonraki adımda ―Element‖ nesnesinden miras almak suretiyle yeni bir eleman
oluşturmak gerekir. Yeni oluşturulan bu elemanda bilinmeyenlerin isimleri ve bu
bilinmeyenlere bağlı olarak eleman denge denklemlerini tanımlamak yeterli olacatır.
Denge denklemlerini tanımlamak için gerekli olan türev ve integral gibi matematik
işlemler FEMWORKS içerisindeki çeşitli yardımcı nesneler sayesinde kolaylıkla
yapılabilmektedir.
Örnek olarak iki boyutlu bir kafes sistem elemanı türetmek için gerekli nesne yapıları
Şekil 5.11 de verilmiştir.

107
ġekil 5.11 : İki boyutlu kafes nesnesi.
Şekil 5.11 incelendiğinde Düğüm noktası yaratmak için hemen hemen hiç kod
yazmaya gerek olmadığı anlaşılabilir. Yine kafes elemanı yaratmak için
hesaplamalarda kullanılacak olan büyüklükleri tanımlamak yeterlidir. ―q‖ metodu ile
de tanımlanan bu büyüklükler cinsinden denge denklemleri vektör formda ifade
edilerek eleman yaratılmış olur.

108
5.2.1 Programlama dilinin yapısı
Mevcut programlama dillerinin birçoğu genel amaçlı kulanım için tasarlanmıştır. Bu
durum sonlu eleman geliştiricilerine zorluk yaratmaktadır. Bu çalışma kapsamında
geliştirilen FEMLANG dili, Sonlu Elemanlar Yöntemi için özel olarak tasarlanmış
olup öğrenmesi ve kullanımı oldukça kolay bir dildir.
FEMLANG yarı nesnesel bir programlama dilidir. Nesnesel programlama
kavramlarının birçoğunu içermez. Ancak FEMWORKS ün belirlediği temel
nesneleri geliştirmek üzere yeni nesneler yaratmak üzere tasarlanmıştır. Bir sonlu
elemanlar problemini çözmek için programda üç adım gereklidir.
Düğüm noktalarını ve elemanları tanımlama (DEFINE)
Sistemi yaratma (CREATE)
Analiz ve grafik çıktı komutları (RUN)
Dilin özellikleri bir kafes sistem örneği ile açıklanmaya çalışılacaktır.
5.2.2 Örnek kafes sistem düğüm noktasının tanımlanması
FEMLANG dili ile yaratılmış örnek bir kafes iki boyutlu kafes sistem düğüm noktası
Şekil 5.12 de verilmiştir.
ġekil 5.12 : İki boyutlu kafes düğüm noktası nesnesi.
1: Define TrussNode : Node
2: get xc
3: get yc
4: set $VARNAMES : u v
5: set $COORDS : u+xc v+yc 0
6: let x = u + xc
7: let y = v + yc
8: ini x = xc
9: ini y = yc
10: out "u="+ u + "w=" + w + "t=" + t
11: End

109
Nesne tanımları ―Define‖ anahtar kelimesi ile başlar. Kelimenin kullanım formatı
aşağıdaki gibidir.
Define NesneAdı [ : FEMWORKS Temel Nesnesi ]
Burada [ ] köşeli parantez içerisine yazılan ifadeler opsiyonel (Kullanılması zorunlu
olmayan) ifade anlamındadır. Şekil 5.12 de ―TrussNode‖ adlı nesne FEMWORKS
deki ―Node‖ temel nesnesinden miras alınarak geliştirilecektir. Bu durumda
―TrussNode‖ nesnesi ―Node‖ un tüm özelliklerine zaten sahiptir demektir.
Define blokları nesnelerin neye benzediklerini, hangi özelliklere ve metotlara sahip
olduklarını tanımlarlar. Gerçek nesneler ise bu özelliklere değer verilerek yaratılırlar.
Nesneleri yaratmak için ileride açıklanacak olan ―CREATE‖ blokları kullanılacaktır.
Nesnelerin yaratılma aşamasında belirli özelliklerine değer atamak gerekmektedir.
―get‖ ile başlayan kod satırları nesne yaratılırken ne tür data bilgisinin gerektiğini
belirlemektedir. Örnekte ikinci ve üçüncü satırlarda ―xc‖ ve ―yc‖ olmak üzere düğüm
noktasının x ve y koordinatlarının belirlenmesi gerektiği bildirilmektedir. Daha açık
bir ifade ile bir düğüm noktası nesnesi x ve y koordinatları verilmeden yaratılamaz.
4. ve 5. satırlardaki ―$‖ işareti ile belirlenen anahtar kelimeler ilgili nesne için özel
işlem anahtar kelimeleridir. ―$VARNAMES‖ ifadesi ile düğüm noktasındaki
değişkenlerin adları belirlenmektedir. Kullanım formatı
set $ÖZEL_KOMUT : ifadeler
şeklindedir. Burada ―:‖ dan sonra aralarında boşluk bırakılarak yazılan tüm kelimeler
birer düğüm noktası değişkeni olarak tanımlanır ve bu değişkenleri ilerleyen
adımlarda isimleri ile kullanmak mümkündür. ―$COORDS‖ ile ilgili değişkenlerden
x,y koordinatlarına geçişin nasıl yapılacağı belirlenmektedir. Genelde düğüm noktası
koordinatları tanımlanan bilinmeyenlerin değerine göre değişmektedirler. Bu yüzden
kullanıcının seçdiği değişkenlerin hangilerinin koordinatları nasıl etkilediğini
tanımlaması zorunlu olmaktadır.
Nesnelere dinamik özellikler tanımlamak için ―let‖ satırları kullanılır. Burada 6. ve 7.
satırlarda x ve y adlı iki özellik tanımlanmıştır. Düğüm noktasının başlangıç
koordinatlarına yer değiştirmeler eklenerek son koordinatlarına erişilebilir. Daha
sonraki hesaplamalarda bu koordinatlar gerekecektir. ―let‖ ile yapılan tanımlamalar
tamamen son kullanıcıya aittir. Kullanım formatı

110
let özellik = değer
şeklindedir. Tanımlanan özelliklerin ilk değerlerini belirlemek için ―ini‖ ifadesi
kullanılabilir. Son olarak ―out‖ ile düğüm noktası nesnesinin çıktı bilgisi olarak
göstermesi istenilen ifadeler tanımlanır.
5.2.3 Örnek kafes elemanın tanımlanması
İki boyutlu bir kafes eleman tanımı Şekil 5.13 de verilmiştir
ġekil 5.13 : İki boyutlu kafes eleman nesnesi.
―Truss2D‖ elemanı FEMWORKS de tanımlı olan ―Element‖ nesnesinden miras
alınarak oluşturulmaktadır. Böylece bir sonlu elemanın sahip olması gereken ortak
tüm özelliklere sahip olacaktır. 2, 3 ve 4. Satırlarda nesne yaratılırken son kullanıcı
tarafından verilmesi gerekli olan datalar tanımlanmıştır. Kullanım formatı
get data [ as data_tipi ]
1: Define Truss2D : Element
2: get n1 as TrussNode
3: get n2 as TrussNode
4: get EA
5: set $NODES : n1 n2
6: let Lx = n2.x - n1.x
7: let Ly = n2.y - n1.y
8: let L2 = Lx*Lx+Ly*Ly
9: let #L = Math.Sqrt(L2)
10: let EPS = (L-#L)/#L
11: let NK = EA * EPS
12: set $ELEMENT_VECTOR : k
13 vec k[1] = -NK * Lx / L
14: vec k[2] = -NK * Ly / L
15: vec k[3] = NK * Lx / L
16: vec k[4] = NK * Ly / L
17: End

111
şeklindedir.Burada data tipi verilmediği zaman gelen datanın bir reel sayı olduğu
kabul edilmektedir. get satırlarında kafes elemanının ―n1‖ ve ―n2‖ adlı iki adet
―TrussNode‖ tipinden düğüm noktası ve ―EA‖ adında rijitliği belirleyici bir
büyüklüğe ihtiyaç duyduğu belirtilmektedir. 5. satırda ―$NODES‖ ile elemanın
hesaba esas düğüm noktalarının hangileri olduğu belirlenmektedir. Burada
hesaplarda kullanılmayan ve sadece bir data olarak elemana gönderilen düğüm
noktaları olma olasılığı düşünülmüştür. 6, 7 ve 8. Satırlarda sırayla elemanın yatay
izdüşüm boyu, düşey izdüşüm boyu ve eleman boyunun karesi tanımlanmıştır. Bu
satırlarda ―n1.x‖ veya ―n2.x‖ şeklindeki ifadelerin kullanımına dikkat çekmek
gerekir. ―n1‖ ve ―n2‖ nesneleri ―TrussNode‖ tipinden oldukları için ―x‖ ve ―y‖ adlı
özellikler daha önceden kullanıcı tarafından tanımlanmıştır.
9. satır dikkatle incelenmelidir. ―#L‖ ifadesi ile tek yazımda iki adet özellik
tanımlanmaktdır. ―#‖ ile başlayan özellikler, ilgili nesne ilk yaratıldığı anda ve
sonrasındaki değişen durumları için özelliğin değerlerini temsil etmektedir. Daha
açık bir anlatımla ilerideki kullanımlarda ―#L‖ olarak kullanılan ifade kafes çubuğun
ilk boyunu (nesne yaratıldığı anda hesaplanan değer), ―L‖ olarak kullanılan ifade ise
elemanın güncel boyunu temsil etmektedir. Böylece 10. satıda yapılan şekil
değiştirme (EPS = epsilon) hesabı oldukça basitleşmektedir. Şekil değiştirmemiş
sisteme ait büyüklüklere de erişmek istendiğinde ―#‖ ifadesini kullanmak yeterli
olacaktır. Bu da yaddoğrusal formülasyonları oldukça kolaylaştırmaktadır.
9. satırda dikkat edilmesi gerek önemli bir husus da ―Math.Sqrt(L2)‖ ifadesidir.
―Math‖ nesnesi Microsoft .Net Framework de tanımlı matematik fonksiyonları
barındıran bir nesnedir. Bu nesne direkt olarak FEMLANG içerisinde
kullanılabilmektedir.
Son olarak eleman denge denklemleri ―vec‖ ile başlayan satırlarda vektör formda
tanımlanmıştır. Burada ―NK‖ normal kuvvet anlamındadır ve 11. satırda nasıl
hesaplanacağı tarif edilmiştir.
Görüldüğü bir kafes eleman yaratmak için 30 satırdan daha az bir programlama
yapmak yeterli olmaktadır.

112
5.2.4 Kafes sistemin yaratılması
Düğüm noktası ve eleman tanımlandıktan sonra bir kafes sistem yaratmak için
―CREATE‖ bloğu kullanılmalıdır. Şekil 5.14 de örnek bir sistem verilmiştir.
ġekil 5.14 : İki boyutlu kafes sistem.
Bu sistemi yaratmak için yazılması gerekli program Şekil 5.15 de verilmiştir.
ġekil 5.15 : İki boyutlu kafes sistemin yaratılması.
1: Create TrussSystem : Structure
2: [TrussNode]
new n1 "0 0"
new n2 "5 0"
new n3 "10 0"
new n4 "15 0"
new n5 "2.5 3"
new n6 "7.5 3"
new n7 "12.5 3"
3: [Truss2D]
new e1 "n1 n2 1000"
new e2 "n2 n3 1000"
new e3 "n3 n4 1000"
new e4 "n1 n5 1000"
new e5 "n2 n5 1000"
new e6 "n2 n6 1000"
new e7 "n3 n6 1000"
new e8 "n3 n7 1000"
new e9 "n4 n7 1000"
new e10 "n5 n6 1000"
new e11"n6 n7 1000"
4: add e1 e2 e3 e4 e5 e6 e7 e8 e9 e10 e11
5: run n1.RestraintAllDOF()
6: run n4.r[1] = 1
7: run n5.f[0] = 15
8: run n7.f[1] = -20
9: End
15 20
5
5
5
3
1000EA
X
Y
1n 4n
5n 6n
7n
1e
2e
3e
4e 5e
6e 7e 8e 9e
10e 11e
2n 3n

113
―Create‖ anahtar kelimesi ile bir nesne yaratılmak istendiği belirtilmektedir. Burada
―tanımlama‖ ve ―yaratma‖ sözcükleri farklı anlamlarda kullanılmıştır. Tanımlama
işlemleri nesnelerin özelliklerini geliştirmek ve yeni nesneler geliştirmek anlamında
kullanılmaktadır. Nesne yaratmak ise mevcut bir nesnenin özelliklerine değer
atanması anlamındadır. Yaratma işlemi bir nevi tanımlanan nesneyi hayata geçirmek
olarak algılanabilir. Şekil 5.15 de, Şekil 5.14 de görünen kafes sistemin dataları
oluşturulmaktadır. 1. satırda ―TrussSystem‖ adında FEMWORKS de tanımlı olan
―Structure‖ tipinden bir nesne tanımlanmıştır. Önceki bölümlerde açıklandığı üzere
―Structure‖ nesneleri düğüm noktası nesneleri, eleman nesneleri ve sınır koşullarını
barındırmaktadır.
2. satır bloğunun başında ―new‖ kelimesi ile yaratılacak olan tüm nesnelerin
―TrussNode‖ tipinden olduğunu bildirilmektedir. ―new‖ ile başlayan satırların
kullanım formatı
new nesne_adı [ ―parametre1 parametre2 ... ― ]
şeklindedir. Sisteme ait düğüm noktaları ―TrussNode‖ tipinden olup yaratılmaları
için başlangıç x ve y koordinatlarının verilmesi gereklidir. Dikkat edilirse sistemdeki
tüm düğüm noktalarına farklı isim verilmiştir.
3. satır bloğunda benzer biçimde ―Truss2D‖ tipinden elemanlar yaratılmaktadır.
―Truss2D‖ tanımına bakılacak olursa, yaratma işlemi için iki adet düğüm noktası ve
EA rijitlik datası verilmesi zorunludur.
4. satırda ―add‖ anahtar kelimesi ile yaratılan elemanlar sisteme dahil
edilmektedirler. Düğüm noktaları için benzer bir ―add‖ satırına ihtiyaç yoktur zira
FEMWORKS elemanların düğüm noktalarını otomatik olarak sisteme dahil
etmektedir.
5. satırda ―n1‖ isimli düğüm noktasının tüm serbestlikleri ―RestraintAllDOF()‖
metodu kullanılarak tutulu hale getirilmiştir. Bu metot yine ―Element‖ nesneleri için
FEMWORKS de tanımlanmış bir metottur.
6. satırda ―n4‖ isimli düğüm noktasının düşey serbesliği engellenmektedir. Burada
elemana ait ―r[]‖ vektörüne (mesnet koşulu vektörü) kullanıcı tarafından doğrudan
atama yapılmaktadır. 7 ve 8. satırlarda benzer şekilde düğüm noktalarının ilgili
serbestlikleri doğrultusunda yük atamaları yapılmaktadır.

114
Daha fazla düğüm noktası ve eleman olması durumunda döngü blokları kullanmak
gerekecektir. Sadeliği korumak için bu konuya değinilmeyecektir.
5.2.5 Çözücü nesnesinin yaratılması (Solver)
Oluşturulan sistemin Newton-Raphson yöntemi ile çözülebilmesi için iterasyonla
ilgili parametrelerin ayarlanması ve sistemin bir çözücü nesneye verilmesi
gerekmektedir. Bunun için Şekil 5.16 de verilen ―Solver‖ tipinden bir nesne
yaratılmalıdır.
ġekil 5.16 : Çözücü parametrelerinin ayarlanması.
Şekil 5.16 da ―solver1‖ isimli bir nesne yaratılmış ve yaddoğrusal çözüm için adım
sayısı ve göreceli yakınsama kriteri belirlenmiştir.
5.2.6 Sistemin çözümü ve sonuçların görüntülenmesi (Run)
Yapılan tüm tanımlama ve yaratma işlemlerinin ardından çözüm yapmak ve
sonuçları görüntülemek için ―Run‖ başlığıyla tanımlanan bir bloğun yazılması
gerekmektedir. Yine Şekil 5.17 de örnek bir ―Run‖ bloğu verilmiştir.
ġekil 5.17 : Analiz ve çıktıların görüntülenmesi.
2. satırda bundan önceki bölümde yaratılan ―TrussSystem‖ nesnesi ―solver1‖ e
verilerek çözüm yapılması sağlanmaktadır. 3. satırda ―TrussSystem‖ in son halinin
çizilmesi sağlanmaktadır. Çizimin nasıl yapılacağı FEMWORKS de belirlenmiştir.
1: Run
2: run solver1.Solve(TrussSystem)
3: run TrussSystem.Draw()
4: run Console.WriteLine(TrussSystem.e1.NK)
5: out TrussSystem.n1
6: End
Create solver1 : Solver
set $STEP_SIZE : 2
set $CONV_CRIT : 0.001
End

115
Esasında bu tip işlemler için de son kullanıcıya yapılar sunmak uygundur fakat tez
kapsamında bu konu gereksiz görülmüştür.
4. satırda ―e1‖ elemanına ait normal kuvvet değeri konsola yazdırılmaktadır. Konsol
ortamı program çıktılarını gösteren bir yazım ortamıdır. Son olarak ―TrussSystem‖
de tanımlı ―n1‖ düğüm noktasının daha önceden tanımlanmış olan çıktılarını
göstermesi istenmektedir.
Sonuç olarak FEMLANG sayesinde Şekil 5.14 de verilen kafes sistemin
elemanlarının yaratılması, tanımlanması ve çözümü 70 satırdan daha az bir kod
yazarak mümkün olmaktadır. Ayrıca bu dili öğrenmek ve kullanmak oldukça
kolaydır. Son olarak belirtmek gerekir ki FEMWORKS ve FEMLANG tez yazım
sürecinde halen geliştirilme aşamasındadır.
5.3 FEMBIND Hakkında
Kısaca özetlemek gerekirse, FEMLANG dilinde oluşturulan bir yapıyı FEMWORKS
ün anlayabileceği bir yapıda tekrar düzenleme ve bu iki yapıyı birleştirme işlemini
FEMBINDER gerçekleştirmektedir. FEMWORKS, Microsoft .Net ortamının bir
üyesi olan C# programlama dilinde yazılmıştır. FEMLANG dilinde programlanan
kodlar C# diline çevrilerek FEMWORKS ile birleştirilmektedirler.

116

117
6. SONUÇLAR
Tez kapsamında iki boyutlu çubuk sistemlerin sonlu yer değiştirme analizlerini
yapmak üzere geliştirilen MyBeam elemanı sayesinde yüksek performanslı statik ve
dinamik çözümler yapılabilmiştir. Elemanın geliştirilmesinde kullanılan dönel eksen
takımı formulasyonu büyük yer değiştirme analizleri için oldukça uygun bir formülasyon
tipidir. Dönel eksen takımına göreceli olarak sonlu yer değiştirme kabulü yapılmıştır ve
bu da eleman iç yük vektörünün ifadesini problemin kesin çözüme oldukça
yaklaştırmıştır.
Ayrıca klasik sonlu eleman türetme tekniklerine alternatif olarak eleman denge
denklemlerinin doğrudan integrasyonu ile elde edilen iç yük vektörü kullanımı başarılı
sonuçlar vermiştir. Bu bağlamda elemanın sonlu yer değiştirme probleminin çözümüne
yeni bir bakış açısı kazandırdığı söylenebilir.
Çubuk problemlerinin çözümünde, şekil değiştirme tansörünün seçimine ilişkin bilgiler
tartışılmış ve değişik ölçülerinin seçiminin önemi ve bu ölçülerin hesaplara olan etkisi
ortaya konulmuştur.
Tez kapsamında yaddoğrusal bir çok problem incelenmiştir. Sonlu yer değiştirme,
plastisite, burkulma ve dinamik analizlerin her birinin kendine has özellikleri vardır.
Tüm bu özellikleri ele alacak bir programlama platformunun oluşturulması sonlu eleman
teorisyenleri ve uygulamacıları için büyük önem arz etmektedir.
Geliştirilen programlama platformu sayesinde sonlu eleman programlama ve problem
çözme süreclerinde büyük kolaylıklar getirilmiştir. SEGAÇ altyapısı gelişmeye oldukça
müsayit olup ileride büyük sonlu eleman program paketleri için uygun bir platform
haline getirilmesi hedeflenmektedir.

118

119
KAYNAKLAR
[1] Turner, M.J., Dill, E. H., Martin, H. C., and Melosh, R. J., 1960. Large
Deflection of Structures Subject to Heating and External Load. J. Aero
Sci. 27, 97-106.
[2] Argyris, J. H., 1964. Recent Advances in Matrix Methods of Structural Analysis.
Pergamon Press.
[3] Tezcan S., Ovunc B., 1966. An iteration Method for he Nonlinear Buckling of
Framed Structures, International Conference on space Structures,
University of Surrey 1966, Blackwell Scientific Publications, London.
[4] Mallet, R. H., and Marcal, P. V., 1968. Finite Element Analysis of Non-Linear
Structures, Proc. ASCE, J. Struct. Div., 94, ST9, 2081-2105.
[5] Oden J. T., 1967. Numerical Formulation of Non-Linear Elesticity Problems.,
Proc. ASCE, J. Struct. Div., 93, ST3, 5290.
[6] Oden, J. T., 1972. Finite Elements of Continua. McGraw-Hill.
[7] Zienkiewwicz, O. C., and Taylor, R. L., 1991. The Finite Element Method
Fourth Edition Volume 2. McGraw-Hill.
[8] Tezcan, S. S., Mahapatra, B. C., and Mathews, C. I., 1950. Tangent Stiffness
Matrices for Finite Elements., IABSE Bulletin, 30 I.
[9] Reddy, J. N., 2004. An Introduction to Nonlinear Finite Element Analysis.
Oxford University Press.
[10] Bathe, K. J., 1996. Finite Element Procedures. Prentice Hall.
[11] Crisfield, M. A., 1991. Non-Linear Finite Element Analysis of Solids and
Structures Volume 1. John Wiley & Sons.
[12] Bhatti A. M., 2006. Advanced Topics in Finite Element Analysis of Structures.
John Wiley & Sons.
[13] Holzapfel G. A., 2000. Nonlinear Solid Mechanics Structures. John Wiley &
Sons.
[14] Belytschko, T., Liu, W. K., and Moran, B., 2001. Nonlinear Finite Elements
for Continua and Structures. John Wiley & Sons.
[15] Pilkey, W. D., 2002. Analysis and Design of Elastic Beams-Computational
Methods. John Wiley & Sons.
[16] Bonet, J., and Wood, R. D., 1997. Nonlinear Continuum Mechanics for Finite
Element Analysis. Cambridge University Press.
[17] Crisfield, M. A., 1997. Non-Linear Finite Element Analysis of Solids and
Structures, Volume 2, Advanced Topics. John Wiley & Sons.
[18] Reddy, J. N., 2008. An Introduction to Continuum Mechanics With
Applications. Cambridge University Press.

120
[19] Dill, E. H., 2007. Continuum Mechanics Elasticity, Plasticity, Viscoelasticity.
CRC Press.
[20] Fertis, D. G., 1998. Nonlinear Mechanics Second Edition. CRC Press.
[21] Levy, R., and Spillers, W. R., 2003. Analysis of Geometrically Nonlinear
Structures, Second Edition. Kluwer Academic Publishers.
[22] Krishnamoorthy, C. S., 1994. Finite Element Analysis – Theory and
Programming. MacGraw-Hill.
[23] Aköz, A. Y., 2005. Enerji Yöntemleri ve Yapı Sistemleri Bilgisayarla Statik ve
Dinamik Hesap. Birsen Yayınevi.
[24] Huges, T. J. R., 2000. The Finite Element Method: Linear Static and Dynamic
Finite Element Analysis. Prentice Hall.
[25] Smith, I. M., Griffiths, D. V., 2004. Programming the Finite Element Method.
John Wiley & Sons.
[26] Ross, C. T. F., 1996. Finite Element Programs in Structural Engineering and
Continuum Mechanics. Horwood Publishing Limited.
[27] Wen, M. T., 2005. Finite Programming in C++. iUniverse.
[28] Hinton, E., and Owen, D. R., 1980. Finite Element Programming. Academic
Press.
[29] MacKie, R. I., 2002. Object-Oriented Methods and Finite Element Analysis.
Saxe-Coburg Publications.
[30] MacKie, R. I., 2008. Programming Distributed Finite Element Analysis: An
Object Oriented Approach. Saxe-Coburg Publications.
[31] Devloo, P. R. B., 1997. An object oriented environment for scientific
programming, Comp. Meth. Appl. Mech. Eng., 150(1–4), 133–153.
[32] Eyheramendy, D., and Zimmermann, T., 1998. Object–oriented finite
elements I. Theory and application of automatic programming, Comp.
Meth. Appl. Mech. Eng. 41–68.
[33] Patzak, B., and Bittnar, Z., 2001. Design of object finite element code,
Advances in Engineering Software, 32(10–11), 759–767.
[34] Villa, A., Rodriguez F., A., and Huerta, S., 1995. Nonlinear finite element
techniques using an object-oriented code. Barcelona. CIMNE.
[35] Gamma, E., 1994. Design patterns: elements of reusable object-oriented
software. New York. Addison-Wesley.
[36] Eyheramendy, D., 1998. FEM theory: an environment for symbolic derivations
and automatic programming of finite elements—developer‘s guide. Int
Rep, LSC, Lausanne: Swiss Fed Inst Tech 98/ 5.
[37] Ohtsubo, H., 1994. Integration of finite element analysis with object oriented
modeling. Third World Cong. Comput. Mech., Chiba, Japan. M4-1
[38] Newmark, N.M., 1959. A Method of Computation for Structural Dynamics,
Journal of the Engineering Mechanics Division, Proceedings ASCE
85(EM5), 67-90.

121
[39] Wilson, E. L., Farhoomand, I., and Bathe, K. J., 1973. Nonlinear dynamic
analysis of complex structures, Earthquake Engineering & Structural
Dynamics Volume 1, 3, 241-252
[40] Wilson, E. L., 1962. Dynamic Response by Step-By-Step Matrix Analysis,
Proceedings, Symposium On The Use of Computers in Civil
Engineering. Labortorio Nacional de Engenharia Civil. Lisbon,
Portugal. October 1-5.
[41] Hughes, T., 1987. The Finite Element Method - Linear Static and Dynamic
Finite Element Analysis. Prentice Hall Inc.
[42] Craig, R. R., and Kurdila, A. J., 2006. Fundamentals of Structural Dynamics
Second Edition. John Wiley & Sons.
[43] Dokainish, M. A., and Subbaraj, K. A, 1989. Survey of direct time-integration
methods in computational structural dynamics. I. Explicit Methods.
Comput Struct, 32(6), 1371-86.
[44] Zienkiewicz, O. C., 1977. A new look at the Newmark, Houbolt, and other time
stepping formulas: a weighted residual approach. Earthquake Engng
Struct Dyn, 5, 413-8.
[45] Modak, S., and Sotelino, E. D., 2002. An object-oriented parallel programming
framework for linear and nonlinear transient analysis of structures.
Comput Struct, 80, 77-84.
[46] Modak, S., and Sotelino, E. D., 2000. The generalized time integration method
for structural dynamic applications. Structural engineering report
STR- 00-01. School of Civil Engineering, Purdue University, West
Lafayette, IN.

122

123
EKLER
Ek A.1 : Konsol kiriş statik analizi. MyBeam, Sap2000 ve ANSYS karşılaştırması
Ek A.2 : ―MyBeam‖ elemanının FEMLANG dili ile programlanması
Ek A.3 : Bezier eğrileri ile konsol kiriş problemi

124
EK A.1 : Konsol kiriş statik analizi. MyBeam, Sap2000 ve ANSYS karşılaştırması
ġekil A.1 : Düşey Yerdeğiştirme (L=1000 , P = 0.1).
ġekil A.2 : Düşey Yerdeğiştirme (L=1000 , P = 0.2).
178.5
179
179.5
180
180.5
181
181.5
182
182.5
183
1 2 3 4 5 6 7 8 9 10
Dü
şey
Yer
Değ
işti
rme
Eleman Sayısı
ANSYS
SAP2000
MyBeam
Teorik
325
330
335
340
345
350
355
1 2 3 4 5 6 7 8 9 10
Dü
şey
Yer
Değ
işti
rme
Eleman Sayısı
ANSYS
SAP2000
BEAM#
Teorik
MyBeam

125
ġekil A.3 : Düşey Yerdeğiştirme (L=1000 , P = 0.4).
ġekil A.4 : Düşey Yerdeğiştirme (L=1000 , P = 1.0).
500
520
540
560
580
600
620
1 2 3 4 5 6 7 8 9 10
Dü
şey
Yer
Değ
işti
rme
Eleman Sayısı
ANSYS
SAP2000
BEAM#
Teorik
MyBeam
650
700
750
800
850
900
950
1000
1 2 3 4 5 6 7 8 9 10
Dü
şey
Yer
Değ
işti
rme
Eleman Sayısı
ANSYS
SAP2000
BEAM#
Teorik
MyBeam

126
ġekil A.5 : Mesnet Momenti (P = 1.0).
.
500
550
600
650
700
750
800
1 2 3 4 5 6 7 8 9 10
Mo
men
t
Eleman Sayısı
ANSYS
SAP2000
BEAM#
Teorik
MyBeam

127
EK A.2 : ―MyBeam‖ elemanının FEMLANG dili ile programlanması
Define BeamNode : Node
get xc
get yc
set $VARNAMES : x y t
set $COORDS : x y 0
ini x = xc
ini y = yc
let u = x - xc
let w = y - yc
End
Define Beam : Element
get n1 as BeamNode
get n2 as BeamNode
set $NODES : n1 n2
let %EI = 3456*5*5*5*5/12
let %EA = 3456*25
let #Lx = n2.x - n1.x
let #Ly = n2.y - n1.y
let L2 = Lx*Lx+Ly*Ly
let #L = Math.Sqrt(L2)
let EPS = 0.5*(L*L-#L*#L)/(#L*#L)
let NK = EA * EPS
let c = Lx/L
let s = Ly/L
let b1 = n1.t
let b2 = n2.t
let #Teta = Math.Atan2(Ly, Lx)
let a1 = Math.Tan(b1 - Teta + #Teta)
let a2 = Math.Tan(b2 - Teta + #Teta)
let m(x) = (a1 + a2) * Math.Pow(x, 3.0) / L2 - (2.0 * a1 + a2) * Math.Pow(x,
2.0) / L + a1 * x
let m1(x) = 3.0 * (a1 + a2) * Math.Pow(x, 2.0) / L2- 2.0 * (2.0 * a1 + a2) * x
/ L + a1
let m2(x) = 6.0 * (a1 + a2) * x / L2 - 2.0 * (2.0 * a1 + a2) / L
let m3(x) = 6.0 * (a1 + a2) / L2
let A(x) = Math.Sqrt(1.0 + Math.Pow(m1(x), 2.0))
let N(x) = EA * (A(x) * L / #L - 1.0)
let Nm1(x) = N(x) * m1(x)
let Nm(x) = N(x) * m(x)
let Nm1x(x) = N(x) * m1(x) * x
let T(x) = EI * (m3(x) - 0* 3.0 * m2(x) / A(x)) / Math.Pow(A(x),4.0)
let MA(x) = EI * m2(x) / Math.Pow(A(x),2.0)
let Tm1(x) = T(x) * m1(x)

128
let Tx(x) = T(x) * x
let m1x(x) = m1(x) * x
let Tmm1(x) = T(x) * m(x) * m1(x)
let A_In = Integrate(A, L, Integrator.g3)
let T_In = Integrate(T, L, Integrator.g1)
let MA_In = Integrate(MA, L, Integrator.g3)
let Tm1_In = Integrate(Tm1, L, Integrator.g2)
let m1_In = Integrate(m1, L, Integrator.g2)
let Tx_In = Integrate(Tx, L, Integrator.g2)
let m1x_In = Integrate(m1x, L, Integrator.g2)
let m_In = Integrate(m, L, Integrator.g2)
let Tmm1_In = Integrate(Tmm1, L, Integrator.g1)
let N_In = Integrate(N, L, Integrator.g2)
let Nm_In = Integrate(Nm, L, Integrator.g2)
let Nm1_In = Integrate(Nm1, L, Integrator.g2)
let Nm1x_In = Integrate(Nm1x, L, Integrator.g2)
let I1 = N_In + Tm1_In;
let I2 = Nm1_In - T_In;
$ELEMENT_VECTOR : k
k[1] = (-I1 * c + I2 * s) / A_In
k[2] = (-I1 * s - I2 * c) / A_In
k[3] = (-MA_In - Nm1x_In + Tx_In + Nm_In + Tmm1_In) / A_In
k[4] = -k[1]
k[5] = -k[2]
k[6] = -k[3] - k[1]*Ly + k[2]*Lx
Create Kiris : Structure
[BeamNode]
new nilk "0 0"
new nson "1000 0"
new n1 "500 0"
[Beam]
new e1 "nilk n1"
new e2 "n1 nson"
add e1 e2
run nilk.RestraintAllDOF()
run nson.elem_f[1]=-0.2
End
Create Solver1 : Solver
End
Run
run Solver1.Solve(new FEMAssembler(Kiris))
Console.WriteLine(Kiris.nson.w)
run Kiris.Draw()
End

129
EK A.3 : Bezier eğrileri ile konsol kiriş problemi
Cizelge A.3.1 : Konsol Kiriş Ucunda Tekil Kuvvet Probleminin Çözümleri.
; ; SS: Serbestlik Sayısı. ES:Eleman Sayısı. Tİ: Toplam İterasyon. D: Doğrusal. P:Tekil.
TEORİK BEZİER SAP2000
PL2/EI w/L u/L Derece SS Tİ w/L u/L w u ES SS w/L u/L teta w u teta
… 6 5 0.0664 0.0026 13.2720 0.5290 1 3 0.0665 0.0022 0.0998 13.29405 0.44218 0.09978
…. 8 5 0.0664 0.0026 13.2730 0.5290 2 6 0.0664 0.0025 0.0997 13.27761 0.50327 0.09967
0.2 0.066 0.003 ….. 10 5 0.0664 0.0026 13.2730 0.5290 3 9 0.0664 0.0026 0.0997 13.27492 0.51732 0.09965
D 0.067 0 …… 12 5 0.0664 0.0026 13.2730 0.5290 5 15 0.0664 0.0026 0.0996 13.27362 0.52484 0.09964
P 0.9 ……. 14 24 72 0.0664 0.0026 0.0996 13.27294 0.52898 0.09964
… 6 7 0.1923 0.0225 38.454 4.498 1 3 0.1949 0.0192 0.2943 38.98203 3.83454 0.29425
…. 8 7 0.1924 0.0225 38.47 4.497 2 6 0.1929 0.0215 0.2915 38.58303 4.29393 0.29145
0.6 0.192 0.022 ….. 10 8 0.1924 0.0225 38.471 4.498 3 9 0.1926 0.0220 0.2910 38.51832 4.40335 0.29104
D 0.200 0 …… 12 8 0.1924 0.0225 38.471 4.498 5 15 0.1924 0.0223 0.2908 38.48719 4.46232 0.29084
P 2.7 ……. 14 24 72 0.1924 0.0225 0.2907 38.47105 4.49488 0.29074
… 6 9 0.3014 0.0565 60.279 11.29 1 3 0.3115 0.0497 0.4751 62.29725 9.94645 0.47513
…. 8 9 0.3017 0.0564 60.339 11.283 2 6 0.3038 0.0542 0.4641 60.76916 10.84645 0.46408
1 0.302 0.056 ….. 10 10 0.3017 0.0564 60.346 11.287 3 9 0.3026 0.0554 0.4625 60.52446 11.08073 0.4625
D 0.333 0 …… 12 11 0.3017 0.0564 60.347 11.288 5 15 0.3020 0.0560 0.4618 60.40795 11.20907 0.46176
P 4.5 ……. 14 24 72 0.3017 0.0564 0.4614 60.34796 11.28045 0.46137

130
Cizelge A.3.1 (devam) : Konsol Kiriş Ucunda Tekil Kuvvet Probleminin Çözümleri.
; ; SS: Serbestlik Sayısı. ES:Eleman Sayısı. Tİ: Toplam İterasyon. D: Doğrusal. P:Tekil.
TEORİK BEZİER SAP2000
PL2/EI w/L u/L Derece SS Tİ w/L u/L w u ES SS w/L u/L teta w u teta
… 6 10 0.4101 0.1081 82.021 21.61 1 3 0.4351 0.0996 0.6753 87.02914 19.92044 0.67528
…. 8 11 0.4108 0.1078 82.166 21.565 2 6 0.4162 0.1047 0.6464 83.23405 20.93136 0.64638
1.5 0.411 0.108 ….. 10 11 0.4110 0.1079 82.197 21.589 3 9 0.4132 0.1064 0.6424 82.63193 21.27224 0.6424
D 0.500 0 …… 12 12 0.4110 0.1080 82.203 21.591 5 15 0.4117 0.1073 0.6405 82.34929 21.46717 0.64054
P 6.75 ……. 14 24 72 0.4110 0.1079 0.6396 82.20516 21.57765 0.63958
… 6 11 0.4918 0.1610 98.359 32.197 1 3 0.5342 0.1546 0.8454 106.8475 30.91992 0.84536
…. 8 12 0.4931 0.1603 98.619 32.065 2 6 0.5022 0.1570 0.7936 100.4382 31.40152 0.79355
2 0.493 0.161 ….. 10 12 0.4934 0.1606 98.687 32.125 3 9 0.4971 0.1588 0.7867 99.41881 31.7603 0.78665
D 0.667 0 …… 12 12 0.4935 0.1607 98.703 32.134 5 15 0.4947 0.1599 0.7835 98.94646 31.98333 0.78345
P 9 ……. 14 24 72 0.4935 0.1606 0.7818 98.70799 32.11403 0.78182

131
Cizelge A.3.1 (devam) : Konsol Kiriş Ucunda Tekil Kuvvet Probleminin Çözümleri.
; ; SS: Serbestlik Sayısı. ES:Eleman Sayısı. Tİ: Toplam İterasyon. D: Doğrusal. P:Tekil.
TEORİK BEZİER SAP2000
PL2/EI w/L u/L Derece SS Tİ w/L u/L w u ES SS w/L u/L teta w u teta
… 6 13 0.7777 0.5524 155.54 110.474 1 3 0.9332 0.6393 1.8029 186.6367 127.8501 1.80287
…. 8 13 0.8061 0.5517 161.212 110.338 2 6 0.8481 0.5674 1.4776 169.6171 113.4872 1.47758
10 0.811 0.555 ….. 10 14 0.8093 0.5529 161.856 110.57 3 9 0.8265 0.5575 1.4491 165.2953 111.4988 1.4491
D 3.333 0 …… 12 14 0.8105 0.5547 162.105 110.94 5 15 0.8160 0.5551 1.4366 163.1975 111.0128 1.43659
P 45 ……. 14 13 0.8110 0.5551 162.192 111.026 24 72 0.8112 0.5548 1.4306 162.2365 110.9671 1.43055
… 6 13 0.7961 0.6191 159.229 123.822 1 3 0.9660 0.7385 1.9597 193.1977 147.7027 1.95965
…. 8 13 0.8392 0.6315 167.847 126.304 2 6 0.8919 0.6559 1.5452 178.375 131.1712 1.5452
15 0.848 0.635 ….. 10 12 0.8458 0.6321 169.15 126.418 3 9 0.8677 0.6405 1.5196 173.5417 128.0993 1.51962
D 5.000 0 …… 12 14 0.8474 0.6344 169.481 126.879 5 15 0.8546 0.6358 1.5078 170.913 127.1589 1.5078
P 67.5 ……. 14 14 0.8481 0.6353 169.629 127.065 24 72 0.8486 0.6351 1.5021 169.712 127.0189 1.50209

132

133
ÖZGEÇMĠġ
Ad Soyad : Murat YILMAZ
Doğum Yeri ve Tarihi : Ankara 1979
Adres : İstanbul Teknik Üniversitesi İnşaat Fakültesi Mekanik
Anabilim Dalı Maslak / İstanbul
Lisans : İstanbul Teknik Üniversitesi, İnşaat Mühendisliği
(1997-2001)
Yüksek Lisans : İstanbul Teknik Üniversitesi, Fen Bilimleri Enstitüsü
İnşaat Mühendisliği Anabilim Dalı, Yapı Mühendisliği
Programı (2001-2003)
Yayın Listesi :
Yılmaz, M., Aköz, Y. A. 2003. Elasto-plastik çerçeve sistemlerin dinamik analizi.
XIII. Ulusal Mekanik Kongresi, Bildiri, Eylül, Gaziantep Türkiye.