polibits vol. 16, 1995 - polibits.gelbukh.com · tal como decodificadores, multi-plexores y...
TRANSCRIPT
Contenido
Editorial
Técnicas de Diseño con Capacidad de Detección deFallas para Circuitos Programables
Ing. Aquilino Cervantes Avila
Estimación de Parámetros de Circuitos Impresos:Un Estudio de CasoM. en I. Miguel Lindig Bos
Optimización de Control Difuso AplicandoAlgoritmos Genéticos
M. en C. Romeo Urbieta Parrazales
La Lógica Difusa como Medio de ControlOptimizado en Sistemas de Disco Compacto
M. en C. Miguel Angel Partida Tapia !
Comparación de los Sistemas Convencionales deControl y los Sistemas Difusos
M. en C. Miguel Angel Partida Tapia !
1
3
9
27
21
32

VII 1 16 polibits 1
Editorial
E l presente número de POLIBITS es muy especial. Está dedicado a la memoria
de nuestro amigo y compañero Miguel Angel Partida Tapia, a quien el destino
decidió llevarse de nuestro lado justo cuando su vida se encontraba en plenitud.
Existen hombres que pasan por la vida sin dejar huella, pero la simiente que Miguel
Angel plantó con su esfuerzo y dedicación quedará por siempre como ejemplo para
todos los que lo conocimos, porque es bien sabido que nadie puede llegar a la cima
armado solo con su talento, ya que Dios da el talento y son el trabajo y la voluntad
quienes lo transforman.
Pero lo más brillante en Miguel no fueron únicamente sus logros como
investigador ni tampoco todos sus méritos como académico, sino la amistad sincera
que en todo momento ofreció a sus amigos y aún a quienes no lo fueron, con su
apoyo constante y desinteresado, y la sonrisa y la broma fácil presentes aún en los
momentos difíciles.
Sin embargo, más allá del dolor que nos produce su partida, este no es un adiós,
porque su presencia a través del recuerdo nos acompañará siempre.
¡ Hasta Pronto, Miguel !

VII 1 16 polibits 1
Tecnicas de Diseño con Capacidad de Detección de Fallas para Circuitos Programables
Técnicas de Diseño conCapacidad de Detección de
Fallas para CircuitosProgramables
Ing. Aquilino Cervantes AvilaAlumno de la Maestría del CINTEC-IPN.
n la implantación de diseñoscon base en circuitos pro-gramables surgen a menudo
errores que son bastante difíciles delocalizar. Lo anterior puede origi-narse por diferentes razones, desdeescasa información del circuito porprogramar, hasta una gran comple-jidad del diseño. Sin embargo, unode los peores casos reside en elmomento en que se reunen varioscircuitos aparentemente ya proba-dos, pero que en conjunto no fun-cionan. En la mayoría de tales casosel desconcierto del usuario es bas-tante. Si además la implantación serealizó en un solo circuito, no esposible localizar exactamente el lu-gar de la falla, y si aunado a loanterior tenemos que la simulacióndel diseño se comporta en formaadecuada, entonces existe un graveproblema que requerirá gran canti-dad de tiempo para corregir el o losposibles errores.
El propósito de este trabajo espresentar alternativas de diseño paraconcebir circuitos con la máximacapacidad de detección de fallos, atales técnicas se les conoce comoPRUEBABILIDAD. En pocas pala-bras, las técnicas de pruebabilidadpresentan una forma de diseño decompleta desconfianza, teniendocomo lema «Primero piensa mal detu diseño y posteriormente piensapeor». De esta manera es posibledetectar problemas clásicos en sis-
temas digitales como son las carre-ras criticas, los riesgos estáticos ydinámicos, la metaestabilidad, ade-más de problemas de otro tipo inhe-rentes al propio diseño en cuestión.
Los métodos presentados a con-tinuación fueron estudiados pen-sando en Dispositivos Lógicos Pro-gramables (PLD's) y particularmen-te en dispositivos MAPL ("MultipleArray Programmable Logic", Arre-glos Logicos Programables Múlti-ples). Sin embargo, también es po-sible utilizarlos para circuitos pro-gramables tales como GATEARRAY's y FPGA's.
Existen varias técnicas de prue-ba para circuitos LSI, cada una delas cuales posee sus propios méto-dos de generación y procesamientode pruebas. No obstante, es posibledividir al conjunto de técnicas endos grandes áreas a) Métodos con-currentes y b) Métodos explícitos.
Métodos concurrentes
El desarrollo de este métodoestablece lógica redundante dentrodel diseño para obtener diferentespuntos de prueba o de detección deerrores. Se hace necesario definiralgunos conceptos fundamentalespara esta técnica, como son:
- Controlabilidad (CY).- Consis-te en la habilidad de obtener unnivel alto o bajo en determinada
salida, a partir de las entradasprimarias.
- Observabilidad (OY).- Consis-te en la habilidad para determi-nar el estado de un nodo internoa partir de las entradas prima-rias.
- Trayectoria de error.- Es elcamino por el cual un error pue-de ser propagado hasta las sali-das.
- Trayectoria paralela.- Descri-be la existencia de un caminoalternativo para propagar unaentrada para la misma compuer-ta y lograr la propagación haciala salida.
- Trayectoria critica.- Se deno-mina de esta manera a la rutalógica que se desea observar porsu importancia dentro del dise-ño o por su susceptibilidad deerrores.
El propósito de sumar lógicaadicional al diseño principal es elobtener puntos de prueba para au-mentar la detección de errores en elcircuito. Debido a que las entradasy salidas se encuentran limitadas, esnecesario agregar lógica de control,tal como decodificadores, multi-plexores y registros de corrimientopara obtener de esta manera lascaracterísticas de controlabilidad yobservabilidad necesarias.
E

2 polibits 1995
Tecnicas de Diseño con Capacidad de Detección de Fallas para Circuitos Programables
Sin embargo, la selección de lospuntos de prueba dependerá princi-palmente del tipo de diseño que seeste ejecutando y de las considera-ciones propias del diseñador.
Algunos de los nodos que pue-den considerarse para agregar pun-tos de prueba son:
- A través de toda la trayectoriacritica ( pueden existir varias enun mismo diseño).
- Señales de reloj y control.
- Puntos de unión de lógica quepueda propagar un error, talescomo contadores, sumadores,registros de corrimiento, codifi-cadores/decodificadores, etc.
NOTA: El uso de las técnicas depruebabilidad por estos métodospuede llegar a tal fascinación que unproyecto se torne muy complejopor la cantidad de elementos deredundancia que se agregaron aldiseño, por tanto se recomienda sermoderado en la aplicación del mé-todo.
De forma general, la controlabili-dad y observabilidad que posean losnodos internos del diseño influiráen forma directa en las considera-ciones a tomar para generar y apli-car vectores de prueba. Para de-mostrar el uso del método expuestoconsidere la figura 1.
De esta figura, es posible obser-var que se aumentan 2 multiplexo-res (M) para poder tener entradasdirectas al bloque B; es decir, seaumenta la controlabilidad en estepunto. Por otra parte también seagregan 2 demultiplexores (D) parapoder observar las salidas del blo-que B; en otras palabras, se incre-menta la observabilidad de ese nodo.
De esta manera es posible indi-car que el circuito representado porla figura 1b representa un diseñoorientado a pruebabilidad, en elcual es mas fácil identificar un error(para este caso se detectaría en quebloque se localiza el error).
Dependerá del tipo de diseño lasconsideraciones a tomar para au-mentar la controlabilidad y observa-
bilidad del circuito propuesto; esdecir, para prueba de circuitos se-cuenciales podría ser útil emplearuno o mas circuitos de retenciónpara garantizar que las entradas osalidas del circuito sean fijas. Perotambién podría ser deseable paraun determinado circuito, utilizar flip-flops como control y obtener deesta manera un diseño que trabajepor flancos y no por nivel ( comotrabaja regularmente un circuitocombinatorio).
El propio diseñador es quienpuede ofrecer las mejores heurísti-cas para decidir que tipo de elemen-tos deberá colocar para lograr undiseño orientado a pruebabilidadpor el método concurrente, ya quenadie mejor que el mismo sabrá losposibles puntos de falla en su diseño(teniendo en mente el lema de lastécnicas de pruebabilidad).
Antes de continuar con el si-guiente método, es convenientedecir que en el caso de que undiseño requiera de sincronizaciónde tiempos, el método concurrentepodría arrojar bastantes errores loscuales podrían ser dados por losretardos obtenidos por la lógicaredundante. De esta forma, el cir-cuito podría demostrar que funcio-na al realizar las pruebas particula-res de los bloques internos del dise-ño y sin embargo fallar en el mo-mento de trabajar todos como unsolo proyecto. De esta manera, tam-bién se hace necesario trabajar detal forma que toda o la mayor partede la lógica asociada sea desechadaen el producto final.
Métodos Explícitos
Todos los métodos explícitosseparan el proceso de prueba del deoperación normal. En general, losmétodos cuentan con tres pasos.
Figura 1. Diagrama a bloques de un diseño lógico. a) Diseño sin pruebabilidad, b) Diseño con pruebabilidad

VII 1 16 polibits 3
Tecnicas de Diseño con Capacidad de Detección de Fallas para Circuitos Programables
1.- Generación de Patronesde Prueba.
El objetivo de este paso es el degenerar patrones de entrada al sis-tema para que pueda detectarsecualquier error, bajo diferentesmodos de operación. Este procesoes el paso mas importante de unmétodo explícito y puede obtenersepor medio de cuatro técnicas
1.1 Generación Manual.
El diseñador debe hacer unanálisis cuidadoso del diseño paraestablecer los patrones que puedanexcitar o producir un error de la listade errores considerados como posi-bles.
Este método es ampliamenteutilizado para diseño de circuitospequeños y tal vez algunos media-nos; sin embargo, el proceso paraoptimizar la longitud de los patro-nes de prueba requiere una grancantidad de trabajo y habilidadesespeciales en el área.
1.2 Generación Algorítmica
Existe una serie de algoritmos deuso especifico que permiten desa-rrollar los patrones de prueba nece-sarios para localizar una gran canti-dad de errores, tales como las técni-cas de Thatte - Abraham y Abadir -Reghbati. La primera describe lamanera de generar patrones paramicroprocesadores y se basa en eldesarrollo de operaciones o instruc-ciones y seguimiento del diagramade estados correspondiente al mi-croprocesador bajo prueba. Por otraparte, el segundo algoritmo se basaen una división del sistema total y enel seguimiento de rutas criticas através de un diagrama de estados;de esta manera se localizan las po-sibles combinaciones de prueba quepuedan arrojar un error.
1.3GeneraciónAleatoria.
Este es el méto-do mas sencillo deobtener y consisteen generar patro-nes de entrada alcircuito (de formaaleatoria) y com-probar su compor-tamiento bajo lasmuestras indica-das.
1.4 Generación porSimulación.
Para este método se utilizan al-gunas de las técnicas anteriores paradesarrollar los patrones de prueba yademás una herramienta CAE pararealizar una simulación del desen-volvimiento del diseño con las en-tradas propuestas. Para lograr unasimulación por lo menos deben co-nocerse los siguientes factores:
a) Descripción de diseño de com-puertas escrito en algún lengua-je especial.
b) Condiciones iniciales de elemen-tos de memoria.
c) Una lista de los posibles errores.
Antes de continuar con el se-gundo punto del método explícitose darán algunas consideracionesen base a las dos primeras técnicas,para desarrollar patrones de prue-ba, recordando que la experiencia yel conocimiento de determinadoproyecto darán las mejores heurís-ticas para el desarrollo de tales pa-trones.
a) Obtención reducida depatrones de entrada.
Por lo regular se recurre a dividirun diseño especifico de tal manera
que se reduzca el número de vecto-res que requiere un proyecto. Parala figura 2, si se toma el proyectocomo una caja negra, debido a queposee 8 entradas se requerirán en-tonces 28 = 256 vectores de prue-ba; no obstante, tomando en cuen-ta el interior del cuadro, es posibleobservar que se puede realizar unadivisión de la manera mostrada,para la cual se tomarán 25 = 32vectores para el circuito superior yexactamente los mismos para elcircuito de abajo, dando un total de64 vectores en lugar de 256.
b) Algoritmo-D.
El algoritmo-D emplea la técni-ca de seguimiento de trayectoriascriticas. El procedimiento que sigueel algoritmo se basa en lo siguiente:Considera A como la entrada capazde propagar un error εεεεε en la salidaZ; si la entrada A en 1(0) tiene comorespuesta ideal Z=0, en ese caso escondición suficiente Z=1 para con-siderar un error a través de esatrayectoria.
De esta manera, tenemos comoantecedente los siguientes puntos :
- Excitación.- Los patronesde entrada deben ser especi-
Figura 2. Demostración de reducción de patronesde entrada.

4 polibits 1995
Tecnicas de Diseño con Capacidad de Detección de Fallas para Circuitos Programables
ficados tomando en cuentacual es el valor de salida paracada uno de ellos.
- Propagación de error.- Serequiere que las posibles tra-yectorias de error posean uncamino hacia un punto quepueda ser observado (La ob-servación puede ser directa oindirecta).
- Justificación de línea.- Lospatrones de entrada debenrecorrer o forzar un caminoa través de las trayectoriasdel paso anterior, conside-rando todas las señales aso-ciadas a ese camino.
Para facilitar el proceso de se-guimiento de errores, se definirá lasiguiente nomenclatura
D.- Representa una señal que tieneun valor 1 para un circuito sinerror y 0 en caso contrario.
E.- Caja negra que contiene un cir-cuito especifico.
Bloque_D .- Específica las entradasmínimas que deben ser aplica-das al elemento E para produciruna señal de error D en lassalidas de E.
Propagación_ D.- Específica lascondiciones mínimas que sonrequeridas para lograr la propa-gación de errores a través de E obloques E, hasta la salida.
Con este antecedente, el algorit-mo posee la siguiente rutina:
1.- Excitación de fallos.- Se elige elBloque_D apropiado y se obtie-nen las señales D del primerelemento E.
2.- Implicación.- En el paso 1, seelige un elemento E que puede ono tener retroalimentaciones in-ternas o externas. Las implica-ciones se dan considerando losdiferentes valores que puede to-mar una señal no conocida (porque pertenece a otro ele-mento E ) y con esto localizar elvalor de D.
3.- Propagación.- Todos los ele-mentos en el circuito que noposeen salidas al exterior, y quetienen una señal D, son coloca-dos en un lista llamada Limite_D.Cada elemento de Limite_D seasigna para que propague susentradas hacia su salida; si estafrontera brinda resultados (quelas salidas sean observadas) ter-mina, en caso contrario se creaun nuevo elemento E estable-ciendo un nuevo límite.
4.- Implicación de propagación_D.-Se aplica la implicación para elelemento E localizado en el pun-to anterior.
5.- Se repiten los pasos 3 y 5 hastaque los errores hayan sido pro-pagados hasta las salidas.
6.- Justificación de línea.- La ejecu-ción de los pasos 1 a 5 puederesultar en especificar las salidasde un elemento E sin consideraralgunas entradas no especifica-das. Para corregir este error deberealizarse una unión de bloquesE para someter a consideraciónlas salidas en conflicto.
7.- Implicación de justificación delínea.- Se lleva a cabo cualquierimplicación del bloque generadoen el paso anterior.
8.- Se repiten los pasos 6 y 7 hastaque todas las salidas en todos loselementos sean completamentejustificadas.
Es posible observar en el pro-pio algoritmo que todas las combi-naciones que puedan llevar a unerror serán consideradas por él.
2.- Aplicación de Patrones dePrueba al Circuito.
Se pueden tomar dos considera-ciones diferentes para el desarrollode esta etapa.
2.1 Aplicación Externa
Esta etapa necesita el uso deequipo especial para inyectar lospatrones de entrada en el circuito(tales como analizadores lógicos,generadores de señales, etc. ).
2.2 Aplicación Interna
Se considera un sistema internoque aplique una serie de patronesestablecidos, de tal manera que elpropio circuito pueda probarse (Au-tocomprobación).
Lógicamente la primer opciónbrinda como ventajas el mejor con-trol sobre el proceso de prueba,además de brindar todo el espaciodel ASIC (Circuito integrado deaplicación especifica) únicamentepara el diseño.
3.- Evaluación de lasRespuestas del Circuito
Consiste en la identificación, através de las respuestas de salida, delos bloques internos, trayectorias,etc.. en los cuales se detectó uno omás errores. Se tienen también dosmaneras de implantar esta etapa:
3.1 Generación deRespuestas Extensivas
Desarrolla una estrategia en lacual se tienen las respuestas correc-tas que arroja el diseño y se compa-

VII 1 16 polibits 5
Tecnicas de Diseño con Capacidad de Detección de Fallas para Circuitos Programables
ran con las que va encontrando elsistema al recibir los patrones deentrada al circuito. La forma decomparación lleva nuevamente ados procedimientos diferentes: enel primero se almacena de formaprevia el conjunto de respuestas delsistema (posiblemente en unaPROM) y se efectúa la compara-ción. Por otra parte, el segundométodo establece un diseño (quepodría ser el del propio simulador) yefectúa la comparación de los valo-res obtenidos en el circuito idealcontra los que son generados almismo tiempo en él circuito real (ladiferencia se establece básicamentesi la comparación se hace contrauna serie de datos ya almacenadoso contra un dato que es generado almomento).
3.2 Generación deRespuestas Compactas
El objetivo de esta técnica esreducir el espacio de almacenamien-to requerido para establecer la com-paración del modelo ideal contra elreal; de esta manera se establecendos técnicas para lograrlo.
La primera técnica es conocidacomo «Conteo de transiciones», yconsiste en contar el número detransiciones lógicas de 1 a 0 oviceversa, para saber el número decuenta necesario para compararcontra los resultados del sistemareal. Para hacer más clara esta téc-nica, considere un multiplexor de 4
a 1, con su tabla de verdad en lafigura 3.
Debido a que la salida Z puedecambiar entre 0 y 1 de acuerdo a laseñal que sea elegida por S0, setiene la tabla 1.
En la tabla es posible verificarque Z sufre 7 transiciones conside-rando el patrón establecido; así, elmétodo tomaría como patrón deentrada al circuito real las entradaspara esta tabla (incluyendo señalesde control) exactamente en ese or-
den; si el númerode transicionesobtenidas por elcircuito es dife-rente de 7 en esecaso el móduloespecifico poseeuno o varios erro-res.
Por otra parte,la segunda técni-
Figura 3. Multiplexor 4 a 1
Tabla 1. Tabla de transicionesde un multiplexor 4 a 1.
Figura 4. Registro retroalimentado decorrimiento de 16 bits.
ca es conocida como «análisis deretroalimentaciones» y consiste bá-sicamente en un análisis repetitivode las salidas con respecto a lasmismas entradas. Cada salida obte-nida de una combinación de entra-das particular se somete a un regis-tro de corrimiento, en donde algu-nas de las salidas de los flip-flops deese registro son retroalimentadas ala entrada del mismo.
La información de las salidas semaneja en formato serial y se sumi-nistra al registro de corrimiento. Elnúmero de bits que debe poseer elregistro de corrimiento es igual alnúmero total de salidas que posee elcircuito. En pocas palabras, el regis-tro de corrimiento se utiliza básica-mente para comprobar que las sali-
das del circuito anterior (que al ini-cio podrían ser las del modelo ideal),sean exactamente iguales a las delpresente; es posible decir que lo quehace este circuito es una especie deverificación de paridad.

6 polibits 1995
Tecnicas de Diseño con Capacidad de Detección de Fallas para Circuitos Programables
Conclusiones
Las técnicas de pruebabilidadbrindan una mayor seguridad en eldiseño con base en circuitos pro-gramables. De forma general, talestécnicas de diseño permiten mante-ner un mayor grado de seguridad yconfiabilidad en los mismos, puestoque garantizan la detección de ungran número de errores, que deotra forma únicamente serán detec-tados cuando los diseños se encon-traran desarrollando su trabajo. Eluso de tales técnicas se justificaprincipalmente en los casos en quese requiera un prototipo de diseñopara producciones en masa; de estaforma se estaría completamente se-guro del producto.
Bibliografía
[1] "Programable Logic DevicesDatabook and DesignGuide".National Semicon-ductor 1993.
[2] Aquilino Cervantes A. "Pro-gramación de DispositivosProgramables Lógicos", Pro-yecto de Tesis para Ingenie-ro en Comunicaciones y Elec-trónica. Julio 1995.
[3] Di Giacomo. "Designing WithHigh Performance ASICs".Prentice Hall 1991.
[4] David Pellerin/Michael Ho-lley. "Practical Design UsingProgramable Logic". Prenti-ce Hall 1991.

VII 1 16 polibits 9
Estimación de Parámetros de Circuitos Impresos: Un Estudio de Caso
Estimación de Parámetros deCircuitos Impresos:Un Estudio de Caso
M. en I. Miguel Lindig BosDirector del CINTEC-IPN.
os circuitos digitales moder-nos operan a frecuencias enexceso de 20 MHz y, salvo
aplicaciones relativamente sencillas,requieren circuitos impresos multi-capa para su realización física. Escomúnmente aceptado que el cir-cuito impreso es una componenteimportante de un sistema dado yque afecta tanto el comportamientode éste, como a su reproducibilidadindustrial y a la confiabilidad delproducto. No deja de sorprender,por lo tanto, la relativamente pocainformación disponible para poderestimar la influencia que el circuitoimpreso tendrá sobre el comporta-miento de un diseño determinado.Por otra parte, si bien existen pa-quetes de simulación poderosos, sucosto resulta prohibitivo para lamayoría de las organizaciones tan-to educativas, como industriales, denuestro país.
En general, el estudio de líneasde transmisión involucra el análisisde las reflexiones generadas pordesacoplamientos entre las impe-dancias de la fuente, de la línea y decarga. En un circuito impreso, en elcual una misma fuente puede ali-mentar a más de una carga, unestudio de esta naturaleza, basadoen medios de cálculo manuales,resulta prácticamente imposible porla cantidad de trabajo involucrado.
En el presente articulo se expo-ne un breve resumen de la teoría enque se fundamenta el estudio delíneas de comunicación, y se pre-sentan las expresiones que seránutilizadas para el análisis de un cir-cuito impreso de cierto nivel decomplejidad. El análisis está basadoen condiciones de estado estacio-nario, y supone que el dispositivoemisor (fuente) se comporta aproxi-madamente como una fuente decorriente constante, con respuestaa la frecuencia uniforme sobre elrango de frecuencias de operación.El estudio se presenta para dosconjuntos de medidas físicas de losconductores del circuito, y se con-cluye que solamente una de lasopciones utilizadas en el análisisresulta aceptable para los objetivosde diseño. Finalmente, la calidad delas señales presentes en los disposi-tivos receptores es estimada, conbase en la expansión en serie deFourier de una señal periódica detipo trapezoidal.
Como se dijo arriba, el análisisestá basado en una serie de suposi-ciones que requieren verificación, omodificación en su caso, de tipoexperimental, en virtud de que lainformación publicada para los dis-positivos utilizados es insuficientepara poder efectuar un estudio con-cluyente. Por otra parte, los pará-metros del circuito impreso puedenser estimados solamente en formaaproximada. El estudio experimen-tal se efectuará una vez fabricado elcircuito, y será objeto de un segun-do reporte técnico.
Fundamentación Teórica
A frecuencias superiores a los10 MHz, el circuito impreso debeser tratado como el soporte estruc-tural de un conjunto de líneas detransmisión, con parámetros (uni-formemente distribuidos) que de-penden de los materiales emplea-dos en su fabricación. Por otra par-
L
Ve
Ie I
V
dlzdl
ydl
L
Ir
Vr
Figura 1.

10 polibits 1995
Estimación de Parámetros de Circuitos Impresos: Un Estudio de Caso
te, la geometría de los distintosconductores y planos de tierra yalimentación influye, también, enlas características eléctricas de estaslíneas de transmisión. Considéresela figura 1.
Una línea conformada por dosconductores une a un emisor y unreceptor, caracterizados por susrespectivas tensiones y corrientesV
e, I
e y V
r, I
r. La línea es caracteriza-
da por una impedancia serie, y unaadmitancia paralela, ambas expre-sadas por unidad de longitud. Enestas condiciones, la caída de ten-sión a lo largo de un elementodiferencial de longitud dl de la líneaestá dada por [1]:
dV = Izdl
Y, similarmente, la corriente eneste elemento decrece por una can-tidad:
dI = Vydl
La solución de las expresionesanteriores conduce a las ecuacionesgenerales de la línea de transmi-sión:
V = Vr cosh√zy L + I
r√z/y senh√zy L
I = Ir cosh√zy L + Vr√y/z senh√zy L
donde la distancia L es medida des-de el extremo receptor de la línea.Expresiones similares pueden serobtenidas en términos del extremoemisor.
La cantidad √z/y se conocecomo la impedancia característica,Z
0, de la línea. Por otra parte, la
cantidad √zy constituye la constan-te de propagación γ (por unidad delongitud) de la misma. A partir de lasexpresiones anteriores, es posibleobtener una expresión para la im-pedancia de entrada de la línea, enfunción de la impedancia del recep-tor:
Ze = Z0 [ ] 1
Finalmente, las tensiones en losextremos emisor y receptor de lalínea pueden relacionarse como si-gue:
Vr = Ve [ ] 2
Parámetros de la Línea
La impedancia serie de una líneade transmisión está conformada porla resistencia óhmica y por la induc-tancia serie de los conductores quela conforman. Por otra parte, laadmitancia paralela posee una com-ponente resistiva y una capacitiva,cuyos valores dependen, entre otrosfactores, del material que separa alos conductores. Para el caso decircuitos impresos, y para frecuen-cias de operación inferiores a las delas microondas, se acepta general-mente que las componentes resisti-vas son despreciables. Por una par-te, y aún considerando efectos desuperficie, el valor de la resistenciaserie de un conductor típico es deunos cuantos ohms por metro li-neal. Por otra, y para los materialesmás frecuentemente usados (papelfenólico, epoxy-fibra de vidrio etc.),la conductividad es menor a 10-12
mhos. En consecuencia, el circuitoimpreso puede ser modelado comouna línea de transmisión sin pérdi-das hasta frecuencias cercanas a 1GHz. La impedancia serie, y laadmitancia paralela toman, respec-tivamente, la siguiente forma:
z = jωL, y = jωC
La impedancia característica sereduce a:
Z0 = √L/C 3
y para la constante de propagaciónse obtiene
γ = jω√LC 4
Nótese que, en general, γ es uncomplejo de la forma α + jβ, cuyaparte real determina la atenuación,por unidad de longitud, que sufre laseñal al viajar por la línea de trans-misión. La componente imaginariaes una medida del desfasamientointroducido por la línea, expresadoen radianes por unidad de longitud.Al despreciar las componentes re-sistivas de la línea, la atenuación sereduce a cero. De la parte imagina-ria puede obtenerse la velocidad depropagación:
vβ = 2πf = ω,
de donde v = 1/√LC 5
La determinación de la induc-tancia y capacidad asociadas a unconductor determinado del circuitoimpreso se complica por los si-guientes factores:
1.- La geometría del conductor.2.- La ubicación del conductor conrelación a plano(s) de tierra.3.- La ubicación del conductor conrelación a otros conductores.
El parámetro más significativopara la determinación, tanto de laimpedancia característica como dela velocidad de propagación es, sinduda, la constante dieléctrica delmaterial aislante utilizado en la fa-bricación del circuito impreso. De laexpresión para la velocidad de pro-pagación se desprende que éstadisminuye conforme C aumenta,esto es, para una geometría deconductores dada, conforme la cons-tante dieléctrica aumenta. Así, parael caso de epoxy - fibra de vidrio, unmaterial cuya constante dieléctrica
ZrcoshγL + Z0senhγLZ
0coshγL + Z
rsenhγL
Zr
ZrcoshγL + Z0senhγL

VII 1 16 polibits 11
Estimación de Parámetros de Circuitos Impresos: Un Estudio de Caso
relativa es de 4.7, la velocidad depropagación puede disminuir amenos de la mitad de la velocidad dela luz (a menos de 140 mm/ns).
Geometría de losConductores
En un circuito multicapa, losconductores se ubican generalmen-te en planos, separados entre sí porplanos de tierra (o de alimentación).La sección transversal de un con-ductor tiende a ser aproximada-mente rectangular, aunque, y deacuerdo al proceso de fabricación,puede tender a trapezoidal y poseercantos más o menos redondeados.Se pueden distinguir dos configura-ciones importantes:
1.-Conductores ubicados en la su-perficie del circuito impreso (cara decomponentes o cara de soldadura),separados de capas interiores porun plano de tierra. Esta configura-ción se conoce como microtira (mi-crostrip), figura 2.
En el cálculo de la capacidadasociada a esta configuración inter-vienen dos constantes dieléctricas.Por una parte, la correspondiente almaterial aislante del circuito impre-so y, por otra, la correspondiente almedio en el cual está inmerso elconductor. Así, si el conductor estácubierto por una pintura protectora(una mascarilla antisoldante, por
ejemplo), la constante dieléctricaefectiva es resultante, también, delgrosor de esta capa y de sus carac-terísticas eléctricas. La impedanciacaracterística aproximada puedecalcularse a partir de la siguienteexpresión [2]:
Z0 = ln ( ) 6
En (6), las dimensiones h, W y tdeben ser expresadas en unidadesconsistentes. Si el conductor estáinmerso en aire, la constante dieléc-trica efectiva, εrf, puede ser estima-da a partir de εr, la constante dieléc-trica (relativa) del material aislantedel circuito impreso [3]:
εrf = [(εr+1) + (εr-1)(1+10h/W)-1/2]/2 7
2.-Conductores ubicados entre dosplanos de tierra. Esta configuraciónse conoce en la literatura de hablainglesa como «stripline». En com-paración con la configuración ante-rior, la impedancia característica dela línea es menor, al igual que lavelocidad de propagación, por lamayor capacidad asociada a los dos
planos de tierra,figura 3.
Para esta confi-guración, la im-pedancia caracte-rística está dadapor [2]:
Z0 = ln ( ) 8
La expresión anterior se cumplesi W(b-t) < 0.35 y si t/b < 0.25
De acuerdo con la referencia[3], la impedancia característica, lavelocidad de propagación y la longi-tud de onda de una señal en uncircuito impreso pueden relacionar-se con los correspondientes valoresen el vacío a través de la constantedieléctrica efectiva asociada a lalínea. En particular:
v = c / √ εrf
9
donde c es la velocidad de la luz envacío.
En general, un circuito impresomulticapa podrá incluir conducto-res en cualquiera de las configura-ciones anteriores, o en ambas. Adi-cionalmente, la existencia de perfo-raciones metalizadas para interco-nectar diferentes capas de conduc-tores, o para dar cabida a dispositi-vos con terminales de inserción,complica el análisis. Sin embargo,es posible obtener una idea aproxi-mada de los efectos del circuitoimpreso sobre las impedancias deentrada y de salida de las compo-nentes asociadas al circuito, así comode la magnitud de sobretiros en lasseñales, a partir de un análisis deestado estacionario, como se ilustraen el siguiente ejemplo.
Figura 2
Wt
dielectrico, εr h
W
t dielectrico, εrbPlanos de Tierra
0.8W + t√ εrf +1.41
87 5.98h
√ εr
60 4b0.67πW(0.8 + t/W)
Figura 3

12 polibits 1995
Estimación de Parámetros de Circuitos Impresos: Un Estudio de Caso
Ejemplo de Diseño
1.- Descripción del Circuito
El circuito que se analiza a con-tinuación es una red de conmuta-ción tipo crossbar para un multi-procesador de 8 procesadores. Latecnología de los dispositivos utili-zados es CMOS, con empaque demontaje de superficie y encapsula-miento de plástico (arreglo de com-puertas programables, dispositivoTPC 1280A de Texas Instruments)[4]. El diseño requiere 32 dispositi-vos de 160 terminales, que midenaproximadamente 32 mm por lado.Se estimó que el circuito impresomediría por el orden de 45 x 35 cm,y que se requerirían cinco capas,incluyendo una capa de tierra y unade alimentación.
Desde el punto de vista de distri-bución de señales, la vía más críticaestá constituida por la interface entreun procesador anfitrión, y los ochoprocesadores que conforman elmultiprocesador propiamente dicho.Un dispositivo establece la comuni-cación entre el bus de expansión delprocesador anfitrión, con otros 8dispositivos, ubicados a distanciascada vez mayores, correspondien-tes a los respectivos procesadoresdel esquema de multiprocesamien-to. Lo que se desea conocer es lamagnitud del retardo introducidopor el esquema de interconexión.Concretamente, la pregunta es si sepuede operar la interface a la velo-
cidad del bus de expansión de lamáquina anfitriona. Por otra parte,se desea saber si el circuito impresoconserva una calidad aceptable delas señales, esto es, que no se gene-ren sobretiros que comprometan ladetección confiable de transicioneslógicas o, inclusive, la integridadfísica de las componentes.
Para el subsecuente análisis sesupone una frecuencia de opera-ción de la interface de 25 MHz. Porotra parte, la capacidad de corrien-te de salida sostenida del dispositivode interface es de 25mA. La capa-cidad parasítica asociada a cadaterminal de los dispositivos utiliza-dos es de 5pfd. En virtud de que latecnología utilizada es CMOS, seconsidera una impedancia de entra-da de los dispositivos puramentecapacitiva.
En lo subsecuente se utilizará eltérmino «mils» para designar milési-mas de pulgada. Para una primeraversión del circuito impreso se utili-zaron reglas de diseño de 25 mils,con pistas de 11 mils de ancho y 1.4mils de grosor. Las diferentes capasdel circuito están ubicadas como semuestra en la figura 4.
Para un circuito impreso de1/16" de grosor, esto es, de 62.5mils, y con capas de cobre de 1.4mils, la separación entre capas esde aproximadamente 14 mils. Así,la cara de componentes está sepa-rada del plano de tierra por 29.4mils, con una constante dieléctricaefectiva dada por la expresión (7).
La separación entre el plano deconductores y el de tierra es de 14mils, con una constante dieléctricaefectiva aproximadamente igual ala del material del circuito impreso.Lo anterior obedece a que el planode conductores está totalmente in-merso en dicho material, a diferen-cia de las caras de componentes yde soldadura que están inmersas enaire. Finalmente, la cara de solda-dura está separada del plano dealimentación por 14 mils, con unaconstante dieléctrica efectiva dadapor la expresión (7).
En el diseño del circuito se buscóevitar que conductores paralelosubicados en la cara de componen-tes y en el plano de conductores seencontraran ubicados uno encimadel otro, esto es, se trató mantenerun desplazamiento horizontal comoel que se indica en la figura. Por otraparte, se limitó la longitud de losconductores de la cara de compo-nentes al mínimo, con objeto dereducir acoplamientos capacitivoscon el plano de conductores.
2.- Calculo de la PrimeraVersión
Para todos los cálculos se asumeun valor de 4.7 para la constantedieléctrica relativa del material ais-lante del circuito (epoxy-fibra devidrio). Para las dimensiones dadasarriba:
2.1 Cara de componentes.
2.1.1 Constante dielétricaefectiva.
Aplicando la ecuación (7), se tiene:
εrf = [(εr+1) + (εr-1)(1+10h/W)-1/2]/2
= [(4.7+1) + (4.7-1)(1+10x29.4/11)-1/2] 2 = 3.202
cara de componentes
plano de conductores
plano de tierra
plano de alimentación
cara de soldadura
Figura 4.
VII 1 16 polibits 13
Estimación de Parámetros de Circuitos Impresos: Un Estudio de Caso
2.1.2 Velocidad dePropagación.
Aplicando (9), resulta:
v = c/√erf = 300/√3.202 = 167.7 mm/ns = 167.7x106 m/s.
2.1.3 Impedancia Característica.
De acuerdo con (6):
Z0 = ln ( )
= ln ( )
=
2.2 Plano de Conductores.
2.2.1 Constante DielétricaEfectiva:
Se tomará el valor de 4.7, dadoque los conductores están inmersosen el material aislante.
2.2.2 Velocidad de Propagación.
Aplicando (9), con εr = 4.7, re-sulta para v = 138.4 mm/ns, estoes, v = 138.4 x 106m/s.
2.2.3 Impedancia Característica.
Aplicando (6), con h=14, se ob-tiene Z
0 = 74.1Ω.
2.3 Cara de Soldadura.
2.3.1 Constante DielétricaEfectiva.
Aplicando (7), con h = 14, resul-ta εrf = 3.35.
2.3.2 Velocidad de Propagación.
Para εrf = 3.35,
v = 163.9 mm/ns =
163.9 x 106m/s.
2.3.3 Impedancia Característica.
Aplicando (6), con h=14, se obtie-ne Z
0 = 83.95Ω.
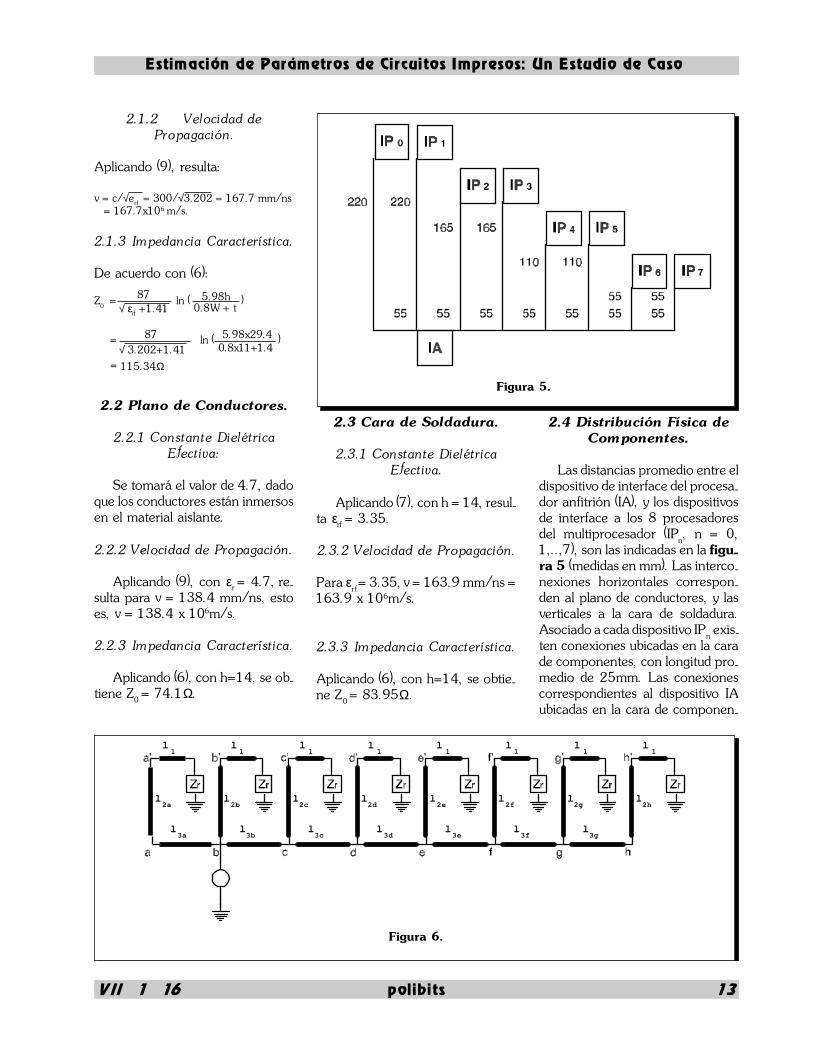
2.4 Distribución Física deComponentes.
Las distancias promedio entre eldispositivo de interface del procesa-dor anfitrión (IA), y los dispositivosde interface a los 8 procesadoresdel multiprocesador (IP
n, n = 0,
1,..,7), son las indicadas en la figu-ra 5 (medidas en mm). Las interco-nexiones horizontales correspon-den al plano de conductores, y lasverticales a la cara de soldadura.Asociado a cada dispositivo IP
n exis-
ten conexiones ubicadas en la carade componentes, con longitud pro-medio de 25mm. Las conexionescorrespondientes al dispositivo IAubicadas en la cara de componen-
√ εrf +1.4187 5.98h
0.8W + t
√ 3.202+1.4187 5.98x29.4
0.8x11+1.4
115.34Ω
Figura 5.
l2a
l1
l3a
l2f
l1
l3f
l2b
l1
l3b
l2h
l1
l2g
l1
l3g
l2e
l1
l3e
l2c
l1
l3c
l2d
l1
l3d
Figura 6.

14 polibits 1995
Estimación de Parámetros de Circuitos Impresos: Un Estudio de Caso
tes poseen longitud despreciable. Acontinuación se determinará la im-pedancia equivalente de entrada alcircuito impreso, vista desde el dis-positivo IA. Como se mencionópreviamente, los dispositivos IP
nposeen características de entradaesencialmente capacitivas, de 5 pfden cada terminal.
2.5 Procedimiento deCálculo.
2.5.1 Circuito Equivalente.
Por lo discutido en el punto 2.4,la distribución física de componen-tes da origen al circuito equivalentemostrado en la figura 6. Las líneasl1 poseen una longitud de 25 mm y
están ubicadas en la cara de compo-nentes. Las líneas l
2a, ..., l
2h poseen
la longitud indicada en la figura 5 ycorresponden a la cara de soldadu-ra y, finalmente, las líneas l
3a, l3c, ...,
l3h
están ubicadas en el plano deconductores y poseen una longitudde 55 mm.
2.5.2 Ecuaciones de Cálculo.
Para una constante de atenua-ción puramente imaginaria, y conbase en las identidades cosh(jx) =cos(x), senh(jx) = jsen(x), la ecuación(1) puede escribirse como:
Ze = Z
0 [ ] 10
y, para Zr = 1/jwC
r, se tiene:
Ze = -jZ0 [ ] 11
De la expresión anterior se des-prende que, para valores de βLpequeños, la impedancia de entra-da a la línea es capacitiva. Sea Ze =1/jωCe. Entonces, la capacidad equi-valente de entrada a la línea, Ce,está dada por:
Ce = C
r [ ] 12
Esto es, para valores de βL pe-queños, el efecto de la línea consis-te en amplificar la capacidad decarga, C
r, por un valor que depende
de la frecuencia de la señal, y de lalongitud, impedancia característicay velocidad de propagación de lalínea. Supóngase una señal de 25MHz, esto es, sea ω= 2πf =157.1x106. Por otra parte, consi-dérese la cara de soldadura del cir-cuito, para la cual Z
0 = 84Ω. De la
ecuación (5), se tiene que:
β = ω/v = 157.1x106/163.9x106
= 0.9585 rad/m.
Para una capacidad Cr = 5 pfd,
de (12) se desprende que Ce tiende
a infinito si L = 1.567 m. Para lavelocidad de propagación y frecuen-cia indicadas, esta longitud corres-ponde, aproximadamente, a0.239λ, donde λ es la longitud deonda.
2.5.3 Determinación de laCapacidad de Entrada
Equivalente.
Para resolver el circuito equiva-lente de la figura 6, se obtendrá lacapacidad de entrada C1a, ..., C1h
reflejada en los nodos a, ..., h, asícomo los valores resultantes en losnodos a, ..., h debido a los segmen-tos de línea l2a, l2b, ..., l2h. Sea C2a,C2b, ..., la capacidad de entrada a laslíneas l2a, l2c,... vista desde los nodosa, b, ... Similarmente, sea C3a lacapacidad de entrada a la línea l3a, yC3c, ..., C3h la capacidad de entradaa las líneas l3c, ..., l3h. La capacidadasociada a un nodo determinado esla suma de las capacidades de entra-da de las líneas que emanan delmismo nodo. Así, Cg = C3h + C2g,etc. La capacidad de entrada vistapor la fuente, esto es, la capacidadasociada al nodo b, puede obtener-
se entonces calculando, en secuen-cia, las capacidades asociadas a losnodos a, h, g,..., y c.
Para C1a
, ..., C1h
se tiene:
β = ω/v= 157.1x106/167.7x106
= 0.9368 rad/m, L = 0.025 m,
ωZ0 = 157.1x106x115.34 = 0.01812x1012
Para Cr = 5x10-12 y substituyendo
en (12), se obtiene:
C1a = 6.306 pfd
Este valor es el mismo para losnodos a, b, ..., h. Las líneas l
2a,
l2b
,... están ubicadas en la cara desoldadura. Para C
2a, C
2b,..., se tie-
ne, entonces :
β = 157.1x106/163.9 x106
= 0.9585 rad/m
ωZ0 = 157.1x106x83.95= 0.01319x1012
Substituyendo C1a
, ... por C
r en
la ecuación (12), se obtiene:
C2a= C2b= 22.93pfdC2c= C2d= 18.63pfdC
2e= C
2f= 14.45pfd
C2g
= C2h
= 10.34pfd
Las líneas l3a, l3c,... están ubica-das en el plano de conductores,para el cual:
β = 157.1x106/138.4 x 106
= 1.1351 rad/m,Z0 = 74.1ΩyωZ
0 = 0.01164x1012
A partir de los valores para C2a
,..., C
2h y substituyendo en (12) se
obtiene:
C3h
= 15.83 pfd, yCg = C3h + C2g
= 15.83 + 10.34 = 26.17 pfd
ZrcosβL + jZ
0senβL
Z0cosβL + jZrsenβL
(1/ωCr)cosβL - Z
0senβL
Z0cosβL + (1/ωCr)senβL
cosβL - ωCrZ
0senβL
cosβL + (1/ωCrZ0)senβL

VII 1 16 polibits 15
Estimación de Parámetros de Circuitos Impresos: Un Estudio de Caso
C3g = 32.16 pfd, yC
f= C
3g +
C
2f
= 32.16 + 14.45 = 46.61 pfd
C3f
= 53.81 pfd, yCe = C3f + C2e
= 53.81 + 14.45 = 68.26 pfd
C3e = 77.49 pfd, yC
d= C
3e +
C
2d
= 77.49 + 18.63 = 96.12 pfd
C3d = 109.13 pfd, yCc = C3d + C2c
= 109.13 + 18.63 = 127.76 pfd
C3c
= 145.06 pfdC3a = 28.78 pfd
Finalmente:
Cb
= C3c
+ C3a
+ C2b
= 145.06 + 28.78 + 22.93= 196.77 pfd
2.6 Discusión.
Para el circuito impreso discuti-do, el dispositivo de interface IA«ve» una capacidad de carga deaproximadamente 200 pfd en cadaterminal. Los dispositivos utilizadosen el diseño [4] especifican retar-dos de salida con base en una capa-cidad de carga nominal de 50 pfd.
Para cargas capacitivas mayo-res, el incremento de los retardos depropagación está especificado comode 0.1ns/pfd. Aquí, el retardo adi-cional introducido por el dispositivosería, entonces, de 15 ns. Por otraparte, el retardo de propagaciónasociado al circuito entre los dispo-sitivos IA e IP
7 es de, aproximada-
mente, 2.72 ns. Así, el retardoadicional total es del orden de 18ns. Este valor es equivalente a casiun semiperíodo de la frecuencia deoperación considerada.
Dada la magnitud de los retar-dos asociados a la lógica interna delos dispositivos utilizados, así comode las señales de interface del bus deexpansión, este retardo no propor-
cionaría márgenes de seguridadaceptables en términos de una ope-ración confiable.
3.- Cálculo de la SegundaVersión
3.1 Alternativas deModificación.
El factor que más influye en elefecto multiplicador de las capaci-dades asociadas al circuito es, evi-dentemente, la longitud de las lí-neas de interconexión. Esto es, laprimera opción a considerar es la dereducir el tamaño del circuito.
Por otra parte, elevar la impe-dancia característica, así como lavelocidad de propagación, reduceel efecto multiplicador arriba citado(véase la ecuación 12). Nótese, sinembargo, que una mayor impedan-cia característica tiende a incremen-tar el efecto de acoplamientos entreconductores vecinos y, en general,a incrementar el nivel de ruido delcircuito. La velocidad de propaga-ción depende en gran medida de laconstante dieléctrica del materialaislante empleado en el circuitoimpreso.
En este sentido, el teflón-fibrade vidrio parece constituir la mejoropción (ε
r = 2.2). Las dimensiones
físicas de los conductores, así comola separación entre éstos y planosde tierra, afectan, principalmente,la impedancia característica. Enparticular, el reducir el ancho delconductor, y el incrementar la sepa-ración entre conductor y plano detierra, conduce a impedancias ca-racterísticas mayores.
A continuación, se analiza unaversión del circuito basada en reglasde diseño de 20 milésimas de pulga-da. El ancho de los conductores dela cara de componentes es 9 mils.En el plano de conductores y carade soldadura, el ancho de conduc-tores es 7 mils. La separación entreconductor y plano de tierra (14mils), así como el grosor de losconductores (1.4 mils) no fueronalterados. La reducción de las re-glas de diseño generó como resulta-do una distribución física de lascomponentes como se muestra enla figura 7, con medidas expresa-das en mm.
Figura 7.
16 polibits 1995
Estimación de Parámetros de Circuitos Impresos: Un Estudio de Caso
3.2 Determinación de laCapacidad Equivalente.
El procedimiento de cálculo es elmismo al seguido anteriormente,por lo que no se repetirá aquí. Losresultados obtenidos son los siguien-tes:
3.2.1 Parámetros.
Cara de componentes:ε
rf = 3.167 v = 168.5x106m/s,
Z0 = 122.72Ω
Plano de conductores:εrf = 4.7 v = 138.4x106m/s,Z0 = 87.34Ω
Cara de soldadura:ε
rf = 3.254 v = 166.3x106m/s,
Z0 = 99.97Ω
3.2.2 Cálculo de CapacidadesReflejadas.
Para C1a
, ..., C1h
se tiene:
β = 157.1x106/168.5x106
= 0.9323 rad/m,L = 0.025 m,Z
0= 122.72Ω
Para Cr = 5x10-12 y substituyendo
en (12), se obtiene C1a, ..., C
1h =
6.22 pfd
Para C2a, C
2b,..., resulta:
β = 157.1x106/166.3 x106
= 0.9447 rad/m,Z0 = 99.97Ω
Substituyendo C1a
, ... por C
r en
la ecuación (12) y los valores de Lindicadas en la figura 7, se obtie-ne:
C2a
= C2b
= 17.96pfdC2c= C2d= 14.95pfdC
2e= C
2f= 11.99pfd
C2g
= C2h
= 9.09pfd
Las líneas l3a
, l3c,... están ubica-
das en el plano de conductores,para el cual:
β = 157.1x106/138.4 x 106
= 1.1351 rad/m,Z
0= 87.34Ω
A partir de los valores para C2a
,..., C
2h y substituyendo en (12) se
obtiene:
C3h= 13.07pfd, yC
g= C
3h +
C
2g= 13.07+9.09 = 22.16pfd
C3g
= 26.48pfd, yCf = C3g + C2f
= 26.48+11.99 = 38.47pfd
C3f
= 43.59pfd, yC
e= C
3f +
C
2e
= 43.59+11.99 = 55.58pfd
C3e
= 62.00pfd, yC
d= C
3e +
C
2d
= 62.00+14.95 = 76.95pfd
C3d
= 85.67pfd, yC
c= C
3d +
C
2c= 85.67+14.95 = 100.62pfd
C3c= 112.83 pfdC
3a= 22.14pfd
Así, la capacidad de carga que«ve» el dispositivo IA es:Cb = C3c + C3a + C2b
= 112.83 + 22.14 + 17.96= 152.93 pfd.
3.3 Discusión.
La reducción en las longitudesde los conductores del orden del15%, así como la reducción delancho de estos conductores, pro-dujo una reducción de la capacidadequivalente de carga de casi 44 pfd.El retardo de propagación adicionaldel dispositivo IA es de aproximada-mente 10.3ns. Por otra parte, elretardo introducido por la separa-
ción entre los dispositivos IA e IP7 es
de:
(6 x 0.047) + 0.047 + 0.025
= 2.47ns
Esto es, para este circuito elretardo adicional total es de aproxi-madamente 12.8ns, una reducciónde 5.2ns con respecto a la primeraversión. Resultados de simulaciónefectuados con los valores anterio-res demuestran que el circuito ope-ra confiablemente en estas condi-ciones.
Con objeto de estimar la calidaden las formas de onda presentes enlos dispositivos IP
0, ..., IP
7, se pro-
pone el siguiente análisis. La dura-ción mínima de las señales de inter-face generadas por el dispositivo IAes de 2 períodos de la frecuencia deoperación nominal, esto es, de 80ns. Supóngase que el dispositivo IAgenera una onda trapezoidal delmismo período (12.5 MHz), conuna amplitud TTL compatible de2.8 Volts (figura 8).
Bajo la condición de que t1 + t0
= T/2, la forma de onda anterioradmite una expansión en serie deFourier de la forma [5]:
f(t) = a0 + a1cos(ω0t) + a3cos(3ω0t) + ... 14
donde:
a0 = A[(t0 + t1)/T]an = 2a0[senπnt1/T]/(pnt1/T)
[senpn(t0 + t
1)/T]/[pn(t
0 + t
1)/T],
n impar
3.4 Formas de Onda en losDispositivos Receptores.
La determinación de la forma deonda en el extremo receptor de unalínea de transmisión involucra ladeterminación de los factores de
(138.4 x 106) (166.3x106) (168.5x106)

VII 1 16 polibits 17
Estimación de Parámetros de Circuitos Impresos: Un Estudio de Caso
dispositivo destino considerado.Aquí, se analizará la señal de entra-da a los dispositivos IP
1 e IP
7, que
representan, respectivamente, lasdistancias de interconexión menory mayor con respecto al dispositivofuente IA (figura 7). La tabla 1 (enla siguiente página) reproduce losvalores obtenidos con base en laecuación (10) para cada uno de losnodos de interés y el rango defrecuencias correspondiente a loscoeficientes considerados arriba.
Para determinar la amplitud decada una de las componentes defrecuencia consideradas en el nodob, se supondrá que las salidas deldispositivo IA pueden ser modela-das como una fuente de tensiónideal, en serie con una resistenciade salida. El valor de dicha fuente noes publicado [4]. Sin embargo, dis-positivos modernos tienden a pro-porcionar una impedancia de salidasimilar a la impedancia característi-ca de circuitos impresos multicapa.Aquí se considerará una resistenciade salida de 100 Ω (figura 10).
Así, para las impedancias pre-sentes en el nodo b y a las frecuen-cias consideradas, y suponiendo quela respuesta a la frecuencia de lafuente ideal es constante, se obtie-nen las relaciones V
b/V
e que se
muestran en la tabla 2.
Considérese la expansión en se-rie de Fourier de la señal trapezoidal
reflexión en los extremos emisor yreceptor, y la aplicación del princi-pio de superposición de las ondasemitidas y reflejadas por la línea.Análisis de este tipo son en extremolaboriosos para estructuras como ladel presente problema. En conse-cuencia, se propone un estudio sim-plificado basado en el cálculo de lasamplitudes de las componentes defrecuencia de la forma de ondaconsiderada, basado en la ecuación(2), discutida al inicio del articulo:
Vr = Ve [ ] 2
La determinación de los coefi-cientes de (14) requiere el conoci-miento del tiempo de transición t1
de la forma de onda propuesta.Desafortunadamente, el manual deldispositivo utilizado [4] no especifi-
ca este valor. Se considerará unapendiente de 1V/ns. Substituyen-do en (14), se obtienen los siguien-tes valores para los coeficientes a
0,
..., a9:
a0 = 1.4, a
1 = 1.779,
a3 = -0.583, a
5 = 0.339,
a7 = -0.255, a9 = 0.198
La figura 9 muestra la expan-sión de la serie para los coeficientesindicados.
La determinación del voltaje efec-tivo presente en el nodo b (véase lafigura 6) depende de la impedan-cia de entrada existente en estenodo para cada una de las compo-nentes de frecuencia consideradas.Por otra parte, la aplicación de (2)requiere la determinación de losvalores Zr asociados a cada nodoubicado entre la fuente (nodo b) y el
1[1+(R/Zb)
2]1/2 Vb = Ve tg
-1R/Zb
Figura 10
Ω
ZrcoshgL + Z0senhgL Zr
Figura 8
Figura 9
Zr
ZrcoshγL + Z
0senhγL

18 polibits 1995
Estimación de Parámetros de Circuitos Impresos: Un Estudio de Caso
100 pfd, para elrango de fre-cuencias consi-derado. Por lotanto, los coefi-cientes de la ex-pansión en seriede la señal V
b es-
tarán dados porel producto de loscoeficientes a
n y
los factores co-rrespondientes ala amplitud nor-malizada, dadosen la tabla 2.
b0 = 1.4,
b1 = 1.795,b
3 = -0.201,
b5 = 0.029,
b7 = -0.443,
b9 = 0.073
La expansiónen serie deFourier del volta-je V
b toma la for-
ma:
Vb = 1.4 + 1.795 cos(ω0t - 0.827) - 0.201cos(3ω0t - 1.354) + 0.029cos(5ω0t - 1.525) - 0.443cos(7ω0t - 0.826) + 0.073cos(9ω0t - 1.481)
donde ω0 = 2π(12.5x106)
Con base en la ecuación (2) sepuede obtener la tensión existenteen cada uno de los nodos conside-rados. Para cargas puramente reac-tivas, ya sea capacitivas, o inducti-vas, la ecuación (2) toma la forma:
Vr = Ve [ ] 15
En la expresión anterior, Zr está
expresado con el signo.
Para el dispositivo IP1, los nodos
de interés son el b, así como el deentrada al dispositivo (figura 6).Aplicando (15) a los nodos citados,se obtienen los valores para V
r /V
emostrados en la tabla 3.
Sea Vdn la tensión presente en la
entrada del dispositivo IPn, y sean
dnk
los coeficientes de la expansiónen serie de Fourier de V
dn. Enton-
ces, el valor de los coeficientes dnk
está dado por los coeficientes bk,
multiplicado por los factores Vr /V
ecorrespondientes a los nodos ubi-cados entre el nodo b y la entrada aldispositivo IP
n. Así, para el disposi-
tivo IP1, el valor de d11
está dadopor 1.008 x 1.001 x b
1 = 1.811,
etc. La expansión en serie con loscoeficientes d
1k se grafica en la fi-
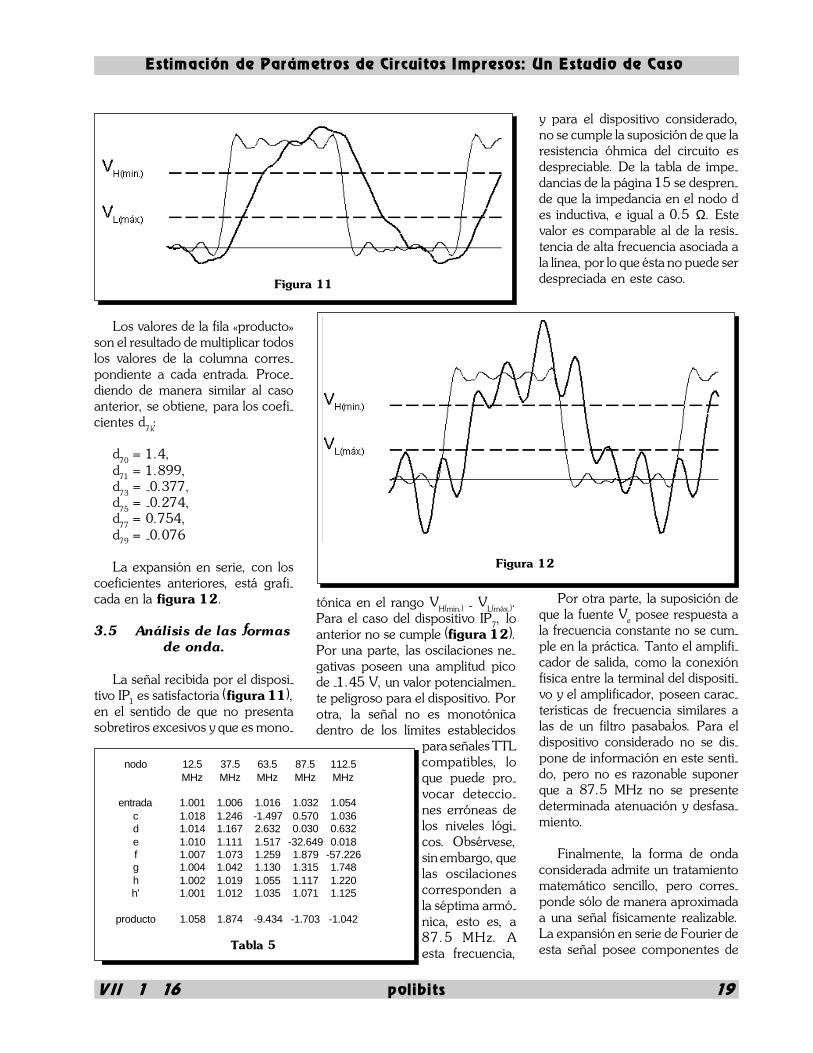
gura 11.
En dicha figura, VH(min.)
es el valormínimo correspondiente al nivellógico de entrada alto. Similarmen-te, V
L(máx.) es el nivel máximo corres-
pondiente al nivel lógico de entradabajo. La señal graficada con líneadelgada corresponde a la fuenteideal considerada (V
e), mientras que
la gráfica de línea gruesa reproducelas señales de entrada del dispositi-vo IP
1.
Para el dispositivo IP7, los nodosinvolucrados, además del corres-pondiente a la entrada del dispositi-vo, son el c, d, e, f, g, h y h (figura6). Los valores para Vr /Ve son losmostrados en la tabla 5.
nodo 12.5 37.5 63.5 87.5 112.5MHz MHz MHz MHz MHz
ZPE1 - ZPE7 -2546j -849j -509j -364j -283jZ1 -2049j -680j -404j -285j -217j
Z2a = Z2b -722j -229j -122j -70j -35jZ
2c= Z
2d-863j -278j -154j -96j -60j
Z2e= Z2f -1070j -349j -199j -132j -91jZ2g = Z2h -1407j -463j -271j -186j -137j
Z3h -982j -320j -183j -121j -84jZ
g = Z
2g Z
3h-578j -189j -109j -73j -52j
Z3g -489j -155j -83j -49j -27jZ
f= Z
2f Z
3g-336j -107j -59j -36j -21j
Z3f
-303j -91j -43j -18j 0.4jZe= Z2e Z3f -236j -72j -35j -16j 0.4j
Z3e
-218j -61j -22j 0.5j 22jZd= Z2d Z3c -174j -50j -19j 0.5j 34j
Z3d -163j -41j -7j 17j 61jZc= Z2c Z3d -137j -36j -7j 21j -3660j
Z3c -129j -28j -5j 39j -323jZ
3a-590j -183j -93j -46j -12j
Zb= Z3a Z2b Z3c -92j -22j -4.6j -96j -9j
discutida anteriormente. Para Ve se
obtuvieron los siguientes coeficien-tes:
a0 = 1.4,a1 = 1.779,a
3 = -0.583,
a5 = 0.339,
a7 = -0.255,
a9 = 0.198
De acuerdo con las especifica-ciones, el dispositivo IA es capaz degenerar una señal TTL compatiblecon cargas capacitivas en exceso de
Tabla 1
Vb/V
e12.5 37.5 63.5 87.5 112.5MHz MHz MHz MHz MHz
amplitud 0.677 0.215 0.046 0.693 0.090ampl. norm. 1 0.318 0.068 1.024 0.133
fase -0.827 -1.354 -1.525 -0.826 -1.481
Tabla 2
nodo 12.5 37.5 63.5 87.5 112.5MHz MHz MHz MHz MHz
b’ 1.008 1.080 1.255 1.643 2.724entrada 1.001 1.006 1.016 1.032 1.054
Tabla 3
1cosβL + (Z0/Zr)senβL
VII 1 16 polibits 19
Estimación de Parámetros de Circuitos Impresos: Un Estudio de Caso
Los valores de la fila «producto»son el resultado de multiplicar todoslos valores de la columna corres-pondiente a cada entrada. Proce-diendo de manera similar al casoanterior, se obtiene, para los coefi-cientes d
7k:
d70
= 1.4,d71 = 1.899,d
73 = -0.377,
d75
= -0.274,d
77 = 0.754,
d79 = -0.076
La expansión en serie, con loscoeficientes anteriores, está grafi-cada en la figura 12.
3.5 Análisis de las formasde onda.
La señal recibida por el disposi-tivo IP1 es satisfactoria (figura 11),en el sentido de que no presentasobretiros excesivos y que es mono-
tónica en el rango VH(min.)
- VL(máx.)
.Para el caso del dispositivo IP
7, lo
anterior no se cumple (figura 12).Por una parte, las oscilaciones ne-gativas poseen una amplitud picode -1.45 V, un valor potencialmen-te peligroso para el dispositivo. Porotra, la señal no es monotónicadentro de los límites establecidos
para señales TTLcompatibles, loque puede pro-vocar deteccio-nes erróneas delos niveles lógi-cos. Obsérvese,sin embargo, quelas oscilacionescorresponden ala séptima armó-nica, esto es, a87.5 MHz. Aesta frecuencia,
y para el dispositivo considerado,no se cumple la suposición de que laresistencia óhmica del circuito esdespreciable. De la tabla de impe-dancias de la página 15 se despren-de que la impedancia en el nodo des inductiva, e igual a 0.5 Ω. Estevalor es comparable al de la resis-tencia de alta frecuencia asociada ala línea, por lo que ésta no puede serdespreciada en este caso.
Por otra parte, la suposición deque la fuente Ve posee respuesta ala frecuencia constante no se cum-ple en la práctica. Tanto el amplifi-cador de salida, como la conexiónfísica entre la terminal del dispositi-vo y el amplificador, poseen carac-terísticas de frecuencia similares alas de un filtro pasabajos. Para eldispositivo considerado no se dis-pone de información en este senti-do, pero no es razonable suponerque a 87.5 MHz no se presentedeterminada atenuación y desfasa-miento.
Finalmente, la forma de ondaconsiderada admite un tratamientomatemático sencillo, pero corres-ponde sólo de manera aproximadaa una señal físicamente realizable.La expansión en serie de Fourier deesta señal posee componentes de
Figura 11
nodo 12.5 37.5 63.5 87.5 112.5MHz MHz MHz MHz MHz
entrada 1.001 1.006 1.016 1.032 1.054c 1.018 1.246 -1.497 0.570 1.036d 1.014 1.167 2.632 0.030 0.632e 1.010 1.111 1.517 -32.649 0.018f 1.007 1.073 1.259 1.879 -57.226g 1.004 1.042 1.130 1.315 1.748h 1.002 1.019 1.055 1.117 1.220h’ 1.001 1.012 1.035 1.071 1.125
producto 1.058 1.874 -9.434 -1.703 -1.042
Tabla 5
Figura 12

20 polibits 1995
Estimación de Parámetros de Circuitos Impresos: Un Estudio de Caso
alta frecuencia mayores a lo quepuede esperarse en la realidad.
Resumiendo, es de esperarseque el dispositivo IP
7 reciba señales
de mayor contenido armónico queel IP
1, pero en menor medida a la
que el presente análisis indica. Antela falta de mayor información técni-ca del dispositivo utilizado, este as-pecto deberá ser evaluado experi-mentalmente.
4.- ResultadosExperimentales Preliminares
Se midió la velocidad de propa-gación en las capas de conductoresy soldadura, utilizando una resisten-cia de fuente, y de terminación, de100 Ω. Los valores obtenidos coin-ciden, dentro del error experimen-tal, con lo reportado en el punto3.2.1. No fue posible medir la im-pedancia característica, por no dis-poner del equipo necesario. Se mi-dió la resistencia óhmica de losconductores, encontrándose 9.3 Ω/m en la capa de conductores, y2.7Ω/m en la de soldadura.
Se simuló la presencia de losdispositivos IP
0 - IP
7 en una línea del
bus que los comunica con el dispo-sitivo IA, mediante condensadoresde 5.6 pfd. Se aplicó una ondacuadrada de 25 MHz en el nodo b,con una amplitud de 2.8 V pico apico y una resistencia de fuente de100 Ω. Los tiempos de ascenso ydescenso de la señal fueron de 4.5ns. La figura 13 reproduce la for-ma de onda observada (trazo grue-so) y la obtenida mediante el análisisdescrito en el punto anterior (trazofino) para el dispositivo IP
0. De
manera similar, la figura 14 repro-duce las formas de onda correspon-dientes al dispositivo IP
7. Los retar-
dos observados coinciden aproxi-madamente con los valores calcula-dos. El contenido armónico obser-
vado, particularmente en la figura14, es considerablemente inferioral obtenido por el análisis descrito.Esto confirma la observación hechaarriba que en líneas largas, la resis-tencia óhmica no puede ser despre-ciada, y que el cálculo debe efec-tuarse con base en valores para laimpedancia característica y cons-tante de atenuación que incluyan aesta resistencia.
Bibliografía
[1] Ware, Lawrence A. & HenryR. Reed: "CommunicationCircuits", 3rd. edition. JohnWiley & Sons, Inc., NewYork, 1964.
[2] Ginsberg, Gerald L. "Prin-ted Circuits Design". McGraw-Hill, Inc., New York,1990.
[3] Sander, K. F. "MicrowaveComponents and Systems".Addison-Wesley Publ. Co.,Reading, Mass., 1987.
[4] "Field Programmable GateArray Data Manual". TexasInstruments, 1994.
[5] Jordan, Edward C., Ed. "Re-ference Data for Engineers:Radio, Electronics, Compu-ter, and Communications",7th. ed., Howard W. Sams &Co., Indianapolis, Ind., 1989.
Figura 13
Figura 14

VII 1 16 polibits 21
Optimización de Control Difuso Aplicando Algoritmos Genéticos
Optimización de Control DifusoAplicando Algoritmos Genéticos
M. en C. Romeo Urbieta ParrazalesProfesor e Investigador del CINTEC-IPN.Dr. Adriano De LucaDr. John Goddard C.Lic. Felipe Vargas L.UAM I.
ste artículo describe unaaplicación de algoritmos ge-néticos, aplicados a las va-
riables difusas de entrada de unsistema de control difuso para unmotor de c.d., con el fin de optimi-zar la variable de posición. Se pre-sentan gráficos de las funciones demembresía de entrada y de la varia-ble de posición para el caso deprueba y error, y para el caso opti-mizado.
Introducción
El buen funcionamiento del posi-cionamiento de la flecha de un mo-tor de c.d. está relacionado con elajuste de los componentes del con-trolador que lo maneja.
Cuando se emplean Controla-dores de Lógica Difusa ("FuzzyLogic Controlers", FLC) los compo-nentes de entrada se seleccionanpor prueba y error ("Controlador deLógica Difusa con funciones de mem-bresía seleccionadas al azar", AD-FLC), como un primer intento decontrolar el sistema.
En este primer intento, en larespuesta de salida del sistema de
control generalmente se observansobretiros grandes o pequeños. Enel caso de la posición de un motoresta respuesta no se desea, porquedañaría la flecha del motor y elposicionamiento no sería óptimo.
Para solucionar este problemalos diseñadores de sistemas de FLC'saplicaron el método descendente,que se convirtió en el método tradi-cional para ajustar FLC's., durantemucho tiempo.
Actualmente, se aplica un méto-do mas ventajoso, el método de
Algoritmos Genéticos ("Genetic Al-gorithm", GA). Este algoritmo seráel que ajuste las funciones de mem-bresía de entrada para el buen fun-cionamiento del sistema (GA-FLC).
Descripción del AD-FLC
Los componentes generales deun sistema de FLC aplicado a unmotor de c.d. se observan en lafigura 1.
E
FUZIFICADOR
BASE
DE
REGLAS
DEFUZIFICADOR
D/A AMP MOTOR
TACOMETROA/D
θθθθ i θ θ θ θ 0
FLC
Figura 1. Sistema a bloques de un AD-FLC.

22 polibits 1995
Optimización de Control Difuso Aplicando Algoritmos Genéticos
Motor
Los datos del motor, amplifica-dor, y convertidor digital-analógico(ADC) son los siguientes:
Motor de c.d.
Vi = Voltaje de entrada= 24 Vcc
i = Corriente= 0.75 A
Ra = Resistencia= 3.6 ohms
J = Inercia del motor= 0.0007 on-in-sec2
Kv = Constante de velocidad= 0.038 Volt-s/rad
Kt = Constante de torque= 3.5 on-in/A
Amplificador de Potencia
Ganancia = 4.8
ADC
Tiempo de muestreo= 1.0E-3 segundos
El modelo del motor con ampli-ficador y ADC viene dado por lasiguiente expresión:
qo(z) Az + B= (1)
Up(z) (z-1)(z-c)
donde :A=0.0048, B= 0.005,C= 0.9231qo(z) = Variable de salida de
posición de la flecha delmotor.
Up(z) = Variable de salida delcontrolador difuso.
El AD-FLC
El AD-FLC se compone de treselementos: fuzificador, base de re-glas, y defuzificador [2,3] (Ver notaen el recuadro inferior). Estos trescomponentes se muestran en lasfiguras 2 y 3. En la figura 2 semuestran las funciones de membre-sías de entrada y salida del FLC,seleccionadas al azar.
Base de Reglas del AD-FLC
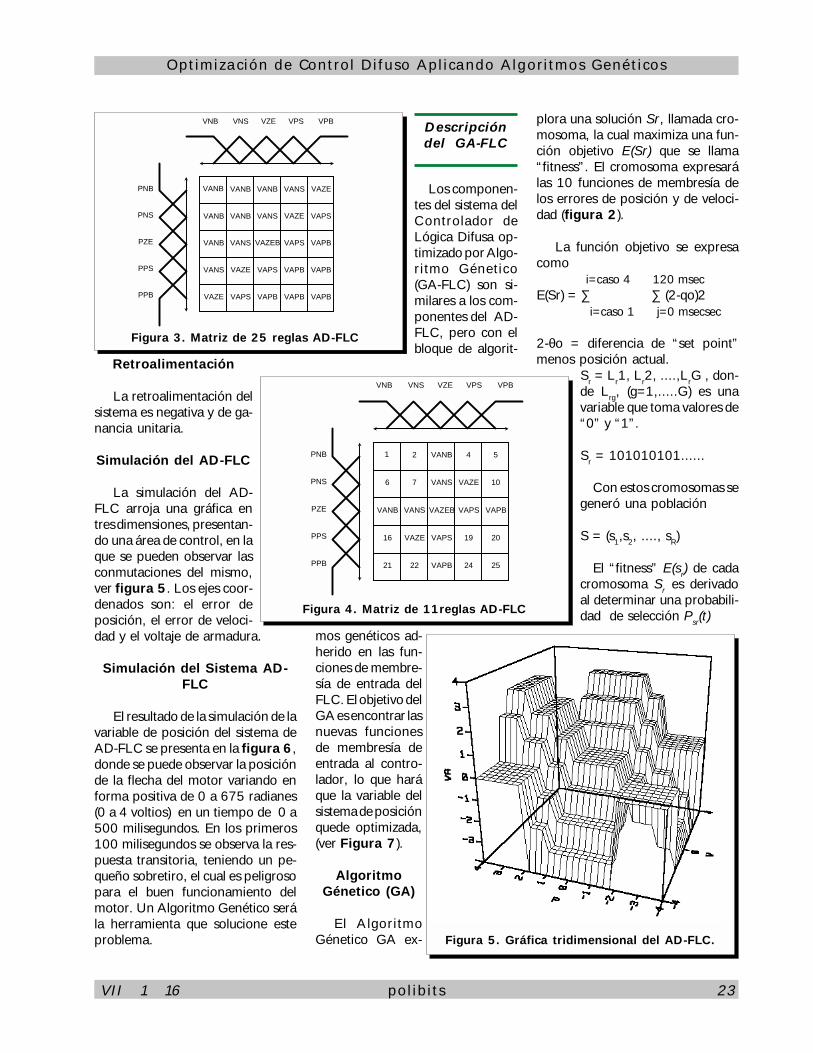
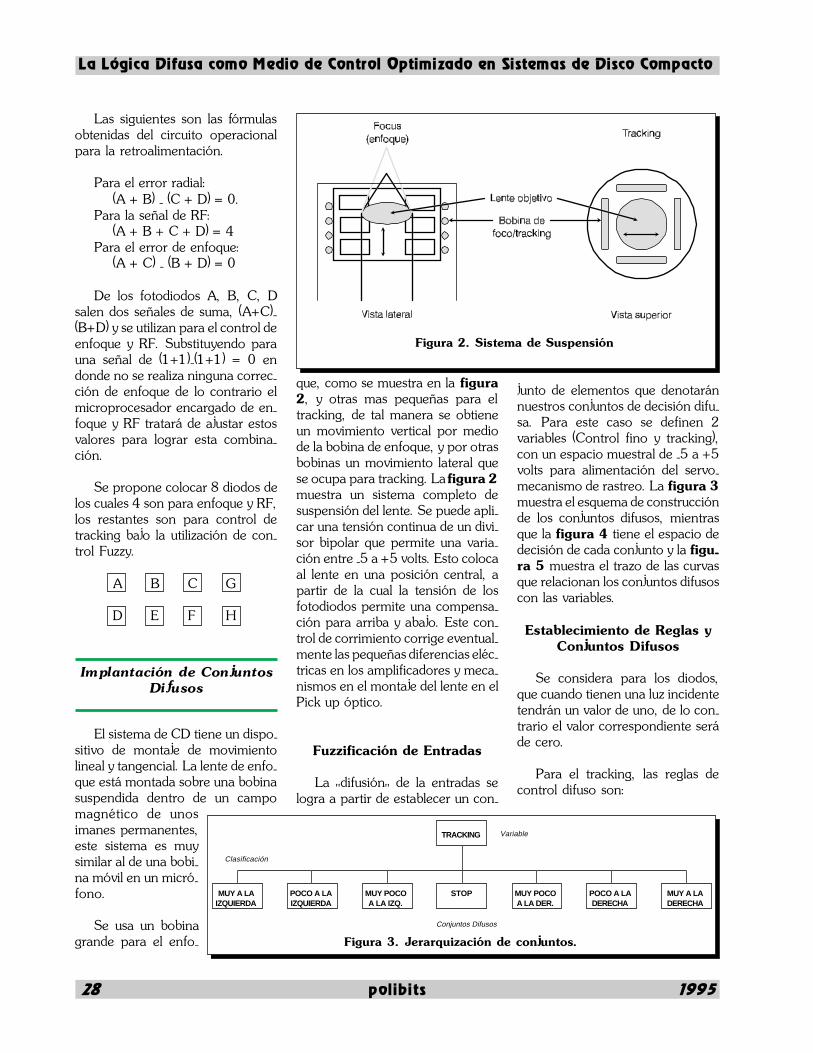
Las figuras 3 y 4 muestran lamatriz de la base de reglas queestabiliza al sistema AD-FLC. Estamatriz se forma con las membresías
de entrada y salida seleccionadas alazar. La matriz de reglas formada esde 5x5, o sea 25 Reglas Si-Enton-ces. El criterio para formar la matrizde reglas se establece por medio deSistemas de Estructura Variable ("Va-riable Structure Systems", VSS). Elcriterio establece una zona de con-mutación en donde convergen losestados del sistema (denominadosVAZE). En otras palabras, la con-
vergencia logra que el sistema seestabilice en esta zona. Para efectosde rapidez en los cálculos, la matrizde reglas se reduce a 11 reglas,debido a que se repiten algunas deellas, figura 4.
NOTA:Los terminos "fuzificador" y "defuzificador" no tienen actualmente un equivalente concreto y globalmente aceptado en el idioma Español.
Su significado mas aproximado es el de "gramatizador de logica difusa"y "desgramatizador de logica difusa". Dado que en el argot empleadoen el medio académico se han adoptado los términos "fuzificador" y "defuzificador" para definir estás acciones, en este articulo y en los siguientesque se publiquen en polibits alrededor de este tema se continuarán aplicando estos terminos y otros similares, hasta tener conocimiento deotros términos de uso generalizado.
-4 -2 0 2 4
PNB PNS PZE PPS PPB
ERROR DE POSICION (a)
-4 -2 0 2 4
VNB VNS VZE VPS VPB
ERROR DE VELOCIDAD (b)
-4 -2 0 2 4
VANB VANS VAZE VAPS VAPB
VOLTAJE DE ARMADURA (C)
Figura 2. a) Cinco funciones de membresia del error de posiciónseleccionadas al azar. b) Cinco funciones de membresia del error develocidad seleccionadas al azar. c) Cinco funciones de membresiade salida del voltaje de armadura seleccionadas al azar, también.
VII 1 16 polibits 23
Optimización de Control Difuso Aplicando Algoritmos Genéticos
Retroalimentación
La retroalimentación delsistema es negativa y de ga-nancia unitaria.
Simulación del AD-FLC
La simulación del AD-FLC arroja una gráfica entres dimensiones, presentan-do una área de control, en laque se pueden observar lasconmutaciones del mismo,ver figura 5. Los ejes coor-denados son: el error deposición, el error de veloci-dad y el voltaje de armadura.
Simulación del Sistema AD-FLC
El resultado de la simulación de lavariable de posición del sistema deAD-FLC se presenta en la figura 6,donde se puede observar la posiciónde la flecha del motor variando enforma positiva de 0 a 675 radianes(0 a 4 voltios) en un tiempo de 0 a500 milisegundos. En los primeros100 milisegundos se observa la res-puesta transitoria, teniendo un pe-queño sobretiro, el cual es peligrosopara el buen funcionamiento delmotor. Un Algoritmo Genético serála herramienta que solucione esteproblema.
Descripcióndel GA-FLC
Los componen-tes del sistema delControlador deLógica Difusa op-timizado por Algo-ritmo Génetico(GA-FLC) son si-milares a los com-ponentes del AD-FLC, pero con elbloque de algorit-
mos genéticos ad-herido en las fun-ciones de membre-sía de entrada delFLC. El objetivo delGA es encontrar lasnuevas funcionesde membresía deentrada al contro-lador, lo que haráque la variable delsistema de posiciónquede optimizada,(ver Figura 7).
AlgoritmoGénetico (GA)
El AlgoritmoGénetico GA ex-
plora una solución Sr, llamada cro-mosoma, la cual maximiza una fun-ción objetivo E(Sr) que se llama“fitness”. El cromosoma expresarálas 10 funciones de membresía delos errores de posición y de veloci-dad (figura 2).
La función objetivo se expresacomo i=caso 4 120 msecE(Sr) = ∑ ∑ (2-qo)2 i=caso 1 j=0 msecsec
2-θo = diferencia de “set point”menos posición actual.
Sr = Lr1, Lr2, ....,LrG , don-de Lrg, (g=1,.....G) es unavariable que toma valores de“0” y “1”.
Sr = 101010101......
Con estos cromosomas segeneró una población
S = (s1,s2, ...., sR)
El “fitness” E(sr) de cadacromosoma Sr es derivadoal determinar una probabili-dad de selección Psr(t)
VANB VANBVANB VANS
VAZE
VAZE
VANB
VANS
VANB VANB VANS
VAPS VAPB
VAZE
VANS
VAPS
VAPB
VAZEB
VAPS
VAPB VAPBVAPB
VAPB
VAPS
VAZE
VNB VNS VZE VPS VPB
PNB
PNS
PZE
PPS
PPB
1 VANB2 4
21
5
VANB
16
6 7 VANS
VAPS VAPB
VAZE
VANS
10
19
VAZEB
VAPS
VAPB 2524
20
22
VAZE
VNB VNS VZE VPS VPB
PNB
PNS
PZE
PPS
PPB
Figura 3. Matriz de 25 reglas AD-FLC
Figura 4. Matriz de 11reglas AD-FLC
Figura 5. Gráfica tridimensional del AD-FLC.

24 polibits 1995
Optimización de Control Difuso Aplicando Algoritmos Genéticos
RPsr(t) = E(sr(t))/ ∑ E(sr(t)) r=1R = no. de cromosomas
Se seleccionan dos conjuntos decromosomas fuera de la población y
se aplica selección de probabilida-des.
Se emplean dos operaciones,una de cruce y otra de mutación.En la operación de cruce se seleccio-na una frontera en la cadena conprobabilidad de 1/G-1, que inter-
cambia los bloques de la cadenafuera de la frontera, obteniéndoseun nuevo cromosoma Sk´(t). Luegouna operación de mutación se apli-ca al nuevo cromosoma, invirtiendosus elementos de acuerdo a unaprobabilidad de mutación. En estecaso se emplearon los siguientesparámetros para efectuar la optimi-zación [4,5].
POBLACION= 40CROMOSOMA = 280VARIABLES = 7ITERACIONES = 200ERROR ACOTACION MINIMA = 6PROBABILIDAD DE MUTACION = 0.1PROBABILIDAD DE CRUCE = 0.75
La ubicación de las nuevas fun-ciones de membresía genera funcio-nes triangulares también, ver figu-ras 8 y 9. Las nuevas funciones demembresías tienen una forma y ta-maño diferentes de las que se pre-sentan en la figura 2, obviamente.A un valor de error mínimo deE(Sr(t)) = 4.8, en la iteración 71 ycromosoma 7.
ERROR DE POSICIÓN:
PZE = 1.165354, 1.165354, 1.165354,3.937008
PPS = -3.622047, -0.976378, -0.976378,2.803150
PPB = -2.929134, -2.929134, -2.929134,2.740157
PNS = -0.976378, -0.535433, -0.535433,1.480315
PNB = -3.496063, -0.661417, -0.661417,3.307087
ERROR DE VELOCIDAD
VZE = -1.732283, -0.724409, -0.724409,-0.535433
VPS = -2.488189, 0.094488, 0.094488, 0.346457
VPB = -2.488189, 1.858268, 1.858268, 2.236220
VNS = -3.370079, -3.370079, -3.370079,-0.598425
VNB = -2.299213, -2.299213, -2.299213, 1.039370
Por lo tanto, con las nuevas fun-ciones de membresía de entradasdel GA-FL se pudo también, como
Figura 6. Respuesta de la posición en el sistema de AD-FLC.
FUZIFICADOR
BASE
DE
REGLAS
DEFUZIFICADOR
D/A AMP MOTOR
TACOMETROA/D
θθθθ i θ θ θ θ 0
FLC
ALGORITMOSGENETICOS
Figura 7. Sistema de GA-FLC

VII 1 16 polibits 25
Optimización de Control Difuso Aplicando Algoritmos Genéticos
en el AD-FLC, obtener la nuevasuperficie de control de Lógica Difu-sa optimizada por Algoritmo Gené-tico, ver figura 10. Comparadacon la figura 5 se observan pocaszonas de conmutación.
La respuesta de la variable deposición del motor ya optimizada sepresenta en la figura 11, en dondese puede observar que a respuestatransitoria se suaviza perfectamen-te.
tructurado en lenguaje de progra-mación C++ resulta también sim-ple. El AD-FLC estabiliza muy biena la variable de posición del sistemacon una matriz de 11 reglas, y traba-ja de la misma forma que una de 25,49, etc. solamente que el cálculoefectuado por la computadora resul-ta ser mas rápido, obviamente, conla matriz de 11 reglas. El AD-FLClogra la estabilidad de la variable deposición con las matrices de reglascon 49, 25, 11 en el controlador,pero no logra la optimización de lamisma. El Algoritmo Genético opti-miza muy bien a la variable de posi-ción del sistema, encontrando nue-vas funciones de membresía de en-trada al controlador, usando un errorabsoluto de 4.8 y con pocas interac-ciones de cálculo (71) en una pobla-ción totalmente reducida (40). Nota:los resultados del AD-FLC para ca-sos de 25 y 49 reglas no se presen-tan en este artículo pues resultanredundantes por tener los mismosefectos que con 11 reglas.
Figura 8. Nuevas funciones de membresia de error de posiciónpara GA-FLC.
-4 -3 -2 -1 0 +1 +2 +3 +4
PPB
PNB
PNS PZEPPS
ERROR DE POSICION
También se presenta una gráficaen la que se puede apreciar las dosrespuestas de posición: la AD-FLC yla de GA- FLC (ver figura 12).
Conclusiones
El el diseño AD-FLC y GA-FLCresulta muy fácil encontrar sus pará-metros, por lo que la edición delsistema en un programa gráfico es-
ERROR DE VELOCIDAD-4 -3 -2 -1 0 +1 +2 +3 +4
VNS VZE VPS VPBVNB
Figura 9. Nuevas funciones de membresia de error de velocidadpara GA-FLC

26 polibits 1995
Optimización de Control Difuso Aplicando Algoritmos Genéticos
Bibliografía y Referencias
[1] Ronald R. Yager. “Alternati-ve Structures for Knowled-ge Representation in FuzzyLogic Controllers”. FuzzyControl Systems. CRC press.pp 100-136.1993.
[2] Arthur Ramer. “InformationComplex and Fuzzy Con-trol”. Fuzzy Control System.CRC press. pp.76-95.1993.
[3] Shigeyasu Kawaji and No-butomo Matsunaga. “FuzzyControl off VSS and itsRobustness”. Kandel andLangholz . Fuzzy Control Sys-tems. CRC Press, 1994, ch.10, pp.223-242.
[4] H. Nomura, Y. Hayami. "AMethod of fuzzy Reasoningby Genetic Algorithms".Central Research laborato-ries, CRC Press. 1994, pp.338- 358.
[5] Chuck Karr. “Applying Ge-netics to Fuzzy Logic” AIExpert. March 1991. pp.38-43.
Figura 12. Gráfica de la variable de posición delAD-FLC vs GA-FLC.
11 Reglas
Tiempo
Figura 10. Gráfica tridimensional del GA-FLC
Figura 11. Gráfica de la variable de posición delsistema GA-FLC.
11 Reglas
Tiempo

La Lógica Difusa como Medio de Control Optimizado en Sistemas de Disco Compacto
VII 1 16 polibits 27
La Lógica Difusa como Medio deControl Optimizado en Sistemas
de Disco CompactoM. en C. Miguel Angel Partida Tapia VSubdirector Académico y de Investiga-ción del CINTEC-IPN.Rafael Noriega OrtízJorge Eduardo Piña TovarLeón Fernando Romero AntigaEstudiantes de la Maestría del CINTEC-IPN.
l sistema de Disco Compacto("Compact Disc", CD) es unaherramienta respaldada por
altos estándares de calidad y su pre-sencia en el mercado está garantiza-da, debido a que es un vehículoaltamente confiable para el manejode datos ampliamente apoyado porsistemas de modulación y correc-ción de errores, tales como:
1.- Modulación EFM.2.- Modulación PCM.3.- Código de corrección de erro-
res CIRC.
Lo que demuestra la superiori-dad relativa de este sistema en mu-chos de sus procesos.
Dado que es un producto cuyociclo de vida se prevé sea muy largo,es importante desarrollar los siste-mas de control o servomecanismosmás versátiles relacionados con sulectura, para así asegurar su preci-sión y confiabilidad.
Utilizando las ventajas intrínse-cas del control Fuzzy, se puedenimplantar en algunos puntos delsistema CD, es posible la optimiza-ción deseada en los siguientes ser-vomecanismos:
I.- Pick up Óptico.a) Tracking.b) Focus, foco o enfoque.
II.- Motor de Carga.III.-Selección de Discos.
Subsistemas deServomecanismos del Disco
Compacto
El pick up óptico
El pick up óptico es el mecanis-mo de guiado, enfoque y recorridoradial del rayo láser que permitirá lasmejores condiciones operativas parael máximo rendimiento en la trans-misión de datos al CI. De esta mane-ra se derivan dos dispositivos y con-troles los cuales son los siguientes:
a) Tracking, el cual es el segui-miento de pistas.
b) Focus, que es el enfoque delrayo láser.
Las señales para los servomeca-nismos de enfoque y seguimientoprovienen de 6 fotodiodos en unsistema convencional de láser triple.De los fotodiodos, 4 se usan para elenfoque y RF (Radio Frecuencia otransmisión de datos), y 2 para elseguimiento, ver Figura 1.
Se ilustran de esta manera distin-tos tipos de sistemas para el controldel haz. Tal es el caso de sistemasdonde por medio de fotodiodos serealiza la corrección de errores.
E
Enfoque
E
F
AD B
C
Tracking
Error de Trackingradial (F-E)
Señal RF(A+B+C+D)
Disco demasiado cerca
Error de foco positivo
Disco enfocado
Error de foco cero
Disco demasiado lejos
Error de foco negativo
Figura 1. Fotodiodos en un sistema convencional de láser triple.
28 polibits 1995
La Lógica Difusa como Medio de Control Optimizado en Sistemas de Disco Compacto
junto de elementos que denotaránnuestros conjuntos de decisión difu-sa. Para este caso se definen 2variables (Control fino y tracking),con un espacio muestral de -5 a +5volts para alimentación del servo-mecanismo de rastreo. La figura 3muestra el esquema de construcciónde los conjuntos difusos, mientrasque la figura 4 tiene el espacio dedecisión de cada conjunto y la figu-ra 5 muestra el trazo de las curvasque relacionan los conjuntos difusoscon las variables.
Establecimiento de Reglas yConjuntos Difusos
Se considera para los diodos,que cuando tienen una luz incidentetendrán un valor de uno, de lo con-trario el valor correspondiente seráde cero.
Para el tracking, las reglas decontrol difuso son:
Figura 3. Jerarquización de conjuntos.
TRACKING
MUY A LA IZQUIERDA
POCO A LA IZQUIERDA
MUY POCO A LA IZQ.
STOP MUY POCO A LA DER.
POCO A LA DERECHA
MUY A LA DERECHA
Variable
Clasificación
Conjuntos Difusos
Las siguientes son las fórmulasobtenidas del circuito operacionalpara la retroalimentación.
Para el error radial:(A + B) - (C + D) = 0.
Para la señal de RF:(A + B + C + D) = 4
Para el error de enfoque:(A + C) - (B + D) = 0
De los fotodiodos A, B, C, Dsalen dos señales de suma, (A+C)-(B+D) y se utilizan para el control deenfoque y RF. Substituyendo parauna señal de (1+1)-(1+1) = 0 endonde no se realiza ninguna correc-ción de enfoque de lo contrario elmicroprocesador encargado de en-foque y RF tratará de ajustar estosvalores para lograr esta combina-ción.
Se propone colocar 8 diodos delos cuales 4 son para enfoque y RF,los restantes son para control detracking bajo la utilización de con-trol Fuzzy.
A B C G
D E F H
Implantación de ConjuntosDifusos
El sistema de CD tiene un dispo-sitivo de montaje de movimientolineal y tangencial. La lente de enfo-que está montada sobre una bobinasuspendida dentro de un campomagnético de unosimanes permanentes,este sistema es muysimilar al de una bobi-na móvil en un micró-fono.
Se usa un bobinagrande para el enfo-
Figura 2. Sistema de Suspensión
que, como se muestra en la figura2, y otras mas pequeñas para eltracking, de tal manera se obtieneun movimiento vertical por mediode la bobina de enfoque, y por otrasbobinas un movimiento lateral quese ocupa para tracking. La figura 2muestra un sistema completo desuspensión del lente. Se puede apli-car una tensión continua de un divi-sor bipolar que permite una varia-ción entre -5 a +5 volts. Esto colocaal lente en una posición central, apartir de la cual la tensión de losfotodiodos permite una compensa-ción para arriba y abajo. Este con-trol de corrimiento corrige eventual-mente las pequeñas diferencias eléc-tricas en los amplificadores y meca-nismos en el montaje del lente en elPick up óptico.
Fuzzificación de Entradas
La "difusión" de la entradas selogra a partir de establecer un con-
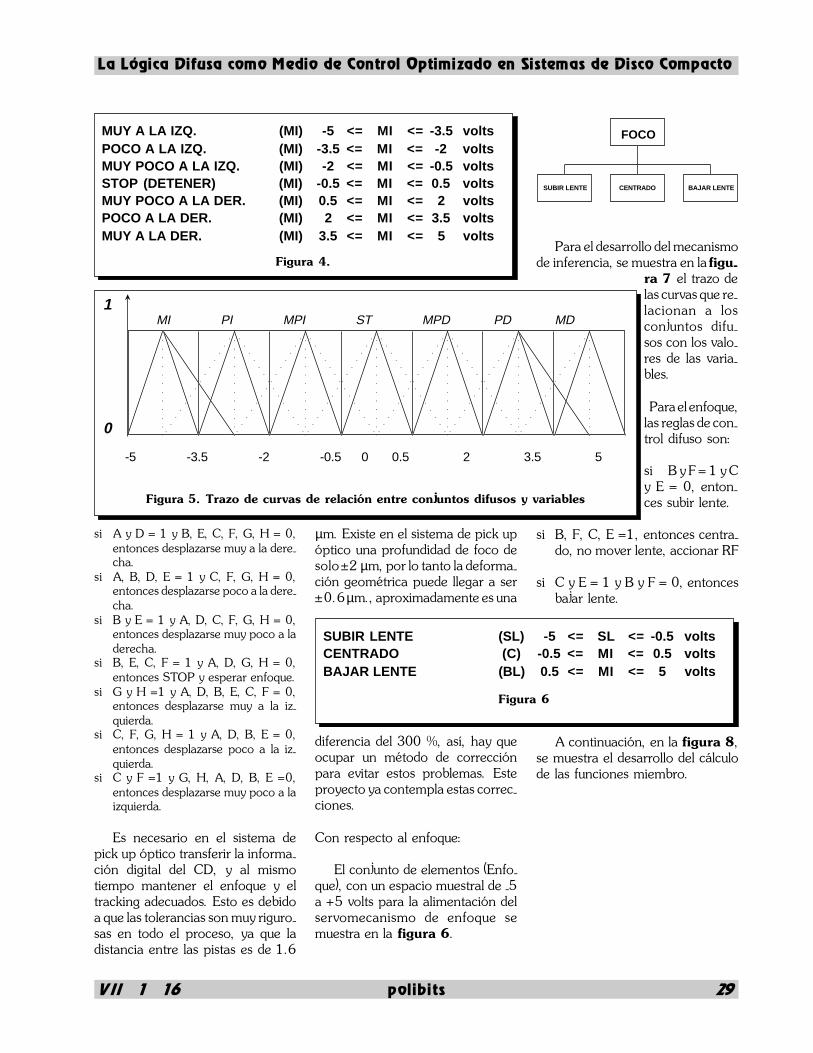
La Lógica Difusa como Medio de Control Optimizado en Sistemas de Disco Compacto
VII 1 16 polibits 29
si A y D = 1 y B, E, C, F, G, H = 0,entonces desplazarse muy a la dere-cha.
si A, B, D, E = 1 y C, F, G, H = 0,entonces desplazarse poco a la dere-cha.
si B y E = 1 y A, D, C, F, G, H = 0,entonces desplazarse muy poco a laderecha.
si B, E, C, F = 1 y A, D, G, H = 0,entonces STOP y esperar enfoque.
si G y H =1 y A, D, B, E, C, F = 0,entonces desplazarse muy a la iz-quierda.
si C, F, G, H = 1 y A, D, B, E = 0,entonces desplazarse poco a la iz-quierda.
si C y F =1 y G, H, A, D, B, E =0,entonces desplazarse muy poco a laizquierda.
Es necesario en el sistema depick up óptico transferir la informa-ción digital del CD, y al mismotiempo mantener el enfoque y eltracking adecuados. Esto es debidoa que las tolerancias son muy riguro-sas en todo el proceso, ya que ladistancia entre las pistas es de 1.6
µm. Existe en el sistema de pick upóptico una profundidad de foco desolo ±2 µm, por lo tanto la deforma-ción geométrica puede llegar a ser±0.6 µm., aproximadamente es una
diferencia del 300 %, así, hay queocupar un método de correcciónpara evitar estos problemas. Esteproyecto ya contempla estas correc-ciones.
Con respecto al enfoque:
El conjunto de elementos (Enfo-que), con un espacio muestral de -5a +5 volts para la alimentación delservomecanismo de enfoque semuestra en la figura 6.
Para el desarrollo del mecanismode inferencia, se muestra en la figu-
ra 7 el trazo delas curvas que re-lacionan a losconjuntos difu-sos con los valo-res de las varia-bles.
Para el enfoque,las reglas de con-trol difuso son:
si B y F = 1 y Cy E = 0, enton-ces subir lente.
si B, F, C, E =1, entonces centra-do, no mover lente, accionar RF
si C y E = 1 y B y F = 0, entoncesbajar lente.
A continuación, en la figura 8,se muestra el desarrollo del cálculode las funciones miembro.
Figura 4.
1
0
MI PI MPI ST MPD PD MD
-5 -3.5 -2 -0.5 0 0.5 2 3.5 5
Figura 5. Trazo de curvas de relación entre conjuntos difusos y variables
MUY A LA IZQ. (MI) -5 <= MI <= -3.5 voltsPOCO A LA IZQ. (MI) -3.5 <= MI <= -2 voltsMUY POCO A LA IZQ. (MI) -2 <= MI <= -0.5 voltsSTOP (DETENER) (MI) -0.5 <= MI <= 0.5 voltsMUY POCO A LA DER. (MI) 0.5 <= MI <= 2 voltsPOCO A LA DER. (MI) 2 <= MI <= 3.5 voltsMUY A LA DER. (MI) 3.5 <= MI <= 5 volts
SUBIR LENTE (SL) -5 <= SL <= -0.5 voltsCENTRADO (C) -0.5 <= MI <= 0.5 voltsBAJAR LENTE (BL) 0.5 <= MI <= 5 volts
Figura 6
FOCO
SUBIR LENTE CENTRADO BAJAR LENTE

30 polibits 1995
La Lógica Difusa como Medio de Control Optimizado en Sistemas de Disco Compacto
Conclusiones
Cabe mencionar que estas im-plementaciones se pueden aplicarpara los restantes sistemas de servo-mecanismos del CD.
Si es verdad que se aumentan deseis a ocho diodos, esta implemen-
Figura 7. trazo de las curvas que relacionan a los conjuntos difusoscon los valores de las variables
SL C BL
-5 -3.5 -2 -0.5 0 0.5 2 3.5 5
1
0
1
0
LimiteSuperior
( LS)
Grado demembresía
Pendiente 1 Pendiente 2
Punto 1 Punto 2
-5 -4.25 -3.5
DELTA 1 DELTA 2
M I Pend ien te 1
Pend ien te 1
D elta 1 x - Pun to 1 =
D e lta 2 Pun to 2 - x =
G rado de M iem bro = va lo r m ín im o de (de lta1 * m 1, de lta2 * m 2, L S)
= va lo r m ín im o de ((1 )(0.75), (0.5 )(-0 .75),1 )
= va lo r m ín im o de (0 .7 5 ,0 .375 ,1)
= 0 .375
= =−−
= −− − −
=
= =−−
= −− − −
= −
= − − − == − − − =
∴ =
my y
x x
my y
x x
M
12 1
2 1
22 1
2 1
1 0
4 25 50 75
1 0
4 25 3 50 75
4 5 1
3 5 4 0 5
0 375
. ( ).
. ( . ).
( )
. ( ) .
.
Figura 8. Cálculo de las funciones miembro.
tación se justifica para las siguientesventajas, con respecto a un sistemaconvencional:
a) Se eliminan los diodos E y F delmodelo convencional, sin em-bargo, se obtiene mayor preci-sión y sobre todo rapidez encontrol de enfoque y tracking.
b) Solo se ocupa un emisor de láserde un solo haz, el de tres hacesresultaría obsoleto.
c) Este diseño soporta con mayorsuperioridad los factores exter-nos, como vibraciones acciden-tales, y/o errores provocadospor movimientos de viaje.
d) En el caso de presentarse unerror el tiempo de recuperaciónes substancialmente menor.
f) Menor pérdida de continuidaden el procesamiento de transmi-sión de información.
g) El sistema de enfoque y trackingse pueden utilizar simultáneamen-te, lo que provocará una mayorvelocidad de acceso a los tracks osectores y lectura.

La Lógica Difusa como Medio de Control Optimizado en Sistemas de Disco Compacto
VII 1 16 polibits 31
h) Se puede implementar para unsistema grabador de CD de altavelocidad.
i) Los servomecanismos se pue-den simplificar ocupando un dri-ver sencillo de CD y eliminarmicroprocesadores complicadosy de alto costo.
j) No necesita ajuste manual, yaque se autocorrige.
Referencias
[1] Imaino, W., and Bhushan,B., 1991, Actuation me-chanisms in optical stora-ge, avances en sistemas dealmacenamiento de informa-ción, vol.1, pag. 375-404.
[2] Li,Y.F.,and Lau,C.C., 1989,Development of Fuzzy al-gorithms for servo systems,Revista Control System deIEEE, Abril, pag. 65-72.
[3] J Zimmerman, Fuzzy setstheory & its application.
[4] Lee-Xin Wang, Fuzzy Siste-ms are universal approxi-mators.
[5] Kitani, H., and Tsunoda, Y.,1984, Large capacity opti-cal disk files, ActualizaciónHitachi, vol. 33, No. 3, pag.109-114.
[6] Yen, J.Y., Hallamasek, K.,and Horowitz, R., 1990,Track following controllerdesign for a compound diskdrive actuator , ASMETrans. J. of Dynamic Syste-ms, Measurement, and con-trol, vol. 112, Septiembre.,pag. 391-402.
[7] Kaneko, R., 1987, Magne-tic and optical disk storagetechnology, JSME Interna-tional journal, vol. 30,No.260, Febrero, pag. 215-220.
[8] Zadeh, L.A., 1968, Fuzzyalgorithm, informe y con-trol, vol. 12, pag. 94-102.
[9] Tang,K.L.,and Mulholland,R.J., 1987, ComparingFuzzy logic with classicalcontroller design, Trans, onSystems de IEEE, Hombre yCibernetica, Vol.SMC-17,No.6, Noviembre, pag.1085-1087.
[10] Katsuhiko Ogata, Ingenie-ría de Control Moderna.
[11] Egon Strauss, CompactDisk.

Comparación de los Sistemas Convencionales de Control y los Sistemas Difusos
32 polibits 1995
Comparación de los SistemasConvencionales de Control y los
Sistemas DifusosM. en C. Miguel Angel Partida Tapia !!!!!Subdirector Académico y de Investigación del CINTEC-IPN.Jorge Eduardo Piña TovarLeón Fernando Romero AntigaRafael Noriega OrtizEstudiantes de la Maestría del CINTEC -IPN
l presente artículo muestra un ejercicio de análisis y comparación de los sistemas convencionales de controly los sistemas actuales, basados en la logica difusa. Este trabajo toma como ejemplo práctico la aplicaciónde estos sistemas al problema del Pendulo Invertido.
I.- Controladores Convencionales
En este tipo de controladores se utilizan modelosmatemáticos, que demuestran teoricamente ser muyprecisos y exactos. Estos modelos se basan en ecua-ciones diferenciales del problema, en las cuales sedeben de ajustar todos los parámetros para cadacomportamiento a requerir o controlar.
Planteamiento del Fenómeno Físico
La figura 1 muestra la Trayectoria de un movil enel plano tridimensional. El desarrollo siguiente, serealiza en base a un problema clásico de control : Elpéndulo invertido, el cual se describe a continuación.
El problema a resolver es mantener siempre enposición vertical la masa junto con la varilla, tratando de mover el carro para lograrlo. El péndulo esta sostenidopor una chumacera, encima de un carro que a su vez tiene movimiento por medio de un sistema de deslizamientodinámico, por lo cual éste puede adoptar dos tipos de direcciones sobre el plano x, y que afecta directamente conel ángulo teta del péndulo con respecto a la normal o eje vertical. El planteamiento que propone el controlconvencional, es desarrollar ecuaciones diferenciales relacionando la posición en el plano x del carro, la velocidadangular y el ángulo teta del péndulo.
Planteamiento de las Fórmulas para Control Convencional
Las siguientes son las fórmulas derivadas en caso de utilizar el método de Laplace
Análisis del Cuerpo Libre
ángulo pequeño
Figura 1. Trayectoria de un móvil en el planotridimensional.
E
Nota: Debido a la extensión del desarrollo matemático contenido en este artículo, se decidió modificar el diseño acostumbrado de 3 columnaspor el de una columna.
mg
x
0
x m
P
cosl
senl
U l
M
u x x lg= = +Fuerza de Control senθ θ = y lg = cosθ

VII 1 16 polibits 33
Comparación de los Sistemas Convencionales de Control y los Sistemas Difusos
Análisis desarrollando la 2ª Ley del Movimiento Rotacional que influye solo a “m” con respecto a un punto“P”, multiplicando y eliminando términos simétricos.
Para “m” en “x” y “y”, de (1) y (2) y tomando en cuenta queel péndulo se debería de conservar en posición vertical, seconsidera que y en consecuencia son pequeños y se pue-den sustituir de la siguiente manera.
Y
Xm
angulo
varilla sin masa
Chumacera
P
( )
( ) ( )
( )
( )
Fd
dtmv m
F mdv Fdr
dtF mr
F ma
F ma
u Md x
dtm
d xy
dtu M
d x
dtm
d
dtxy xy x l
u Md x
dtm
d
dtx l
a dx dx
d
dt
d
dt
= =
= = =
=
=
= + = + = +
= + +
=
= = −
; para que constante
; ;
; Ecuaci n diferencial de movimiento de la part cula
o punto de masa.
Por la segunda Ley de Newton en direcci n "x" del movimiento
Se sustituye
; se sustituye
por regla de la cadena
;
2
2
&&&
sen
sen
(sen ) cos &
sen (cos ) sen ( sen ) &
2
2
2 2
2
2
2
2
2
2
22
θ
θ
θ θ θ
θ θ θ θ θ θ
( )
[ ]
+
= − = − −
+ +
=
+
+ − +
=
= + − + =
= + −
(cos ) &&
cos (sen ) & cos (cos ) & (sen ) &&
( sen )
( (sen ) & (cos ) &&)
&& && (sen ) & (cos ) &&
&& && (sen )
θ θ
θ θ θ θ θ θ θ θ
θ
θ θ θ θ
θ θ θ θθ
bd
dt
d
dt
Md
dtx m
d
dtx m
d
dtl u
Md
dtx m
d
dtx ml u
Mx mx ml ml
Mx mx ml
;
Desarrollando de la 2“ Ley de Newton para movimiento de M y m en "x"
2
22
2
2
2
2
2
2
2
2
2
22
2
( )& (cos ) &&
( )&& (sen ) & (cos ) &&θ θ θ
θ θ θ θ
2
21
+ =
→ + − + =
ml
M m x ml ml u para mov. en "x"
( ) ( ) ( )[ ]
( ) ( )
L
L
md y
dtm s y s sy y
y y
md y
dtms y s
2
22
2
2
0 0
= − −
= = ∴
=
θ θ&
&si
mx ml mg&&cos && senθ θ θ+ =
θ &θ

Comparación de los Sistemas Convencionales de Control y los Sistemas Difusos
34 polibits 1995
md xg
dtl m
d yg
dtl
lmg
md xg
dtl m
d yg
dtl mgl
w mgl peso mld
dtmg
xg xy
md
dtx l l m
d
dtl l mgl
md
dtx ml
d
dtl ml
d
dt
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
cos sen
sen
( cos ) ( sen ) sen
sen sen
( sen ) cos ( cos ) sen sen
sen cos cos
θ θ
θ
θ θ θ
θθ
θ
θ θ θ θ θ
θ θ θ
−=
− =
= = = −
+
−
=
+
−
se sustituye " " y " "
de (a) y (b) Se desarrolla de la siguiente manera.
[ ][ ][ ] [ ][ ][ ][ ] [ ][ ]
=
+ − + − − − =
− + − − + =
l mgl
mx ml l ml l mgl
m x l l l m l l l lmg
sen sen
&& ( sen ) (cos ) && cos (cos ) & (sen ) && cos sen
&& (sen ) & (cos ) && cos (cos ) & (sen ) && sen sen
θ θ
θ θ θ θ θ θ θ θ θ θ θ
θ θ θ θ θ θ θ θ θ θ θ
2 2
2 2
, Reduciendo
( )( )
[ ] [ ] [ ] [ ]( )
( )
sen cos &&( ) &&
& && &&
&&( ) && && && && && && && && &&&& &&
&& ( )
θ θ θ θθθ θ θ θ
θ θ θ θ θ θ θθ
θ θ θ
≈ ≈ + + = →
≈ + = →
+ + − − + − = + + − − + − = − += − →
− + + = →
1 3
4
5
6
2
si Restamos (3) y (4) para eliminar terminos
De (3) y (5) se elimina x y se multiplican
Si se res
x M m lm u
mx lm mg
x M m lm u mx lm mg Mx mx lm u mx lm mg Mx u mg
Mx u mg
Ml M m g u
( )
( )( )
uelve por funciones de transferencia tenemos
De (3) y (4) Se derivan las siguientes variables de estados como:
por matrices.
sθ
θ θ
−=
− +→
= = = = ∴ = =+
− = = +
U Mls M m g
x x x x x x x x xM m
Mlgx
Mlu x x x
m
Mgx
Mu
s
17
1 2 21
3 4 41
2
1 2 3 4 1 1
( )
; && ; ; & & ; &( )
; & ; &

VII 1 16 polibits 35
Comparación de los Sistemas Convencionales de Control y los Sistemas Difusos
Como se desea que el sistema de péndulo invertido sea autocorregible, se pueden aplicar las siguientesecuaciones de control convencional para manejar y controlar la salida del sistema.
Un sistema de control convencional como el anterior, esta propenso a condiciones poco estables, agregandoque sus parámetros no son tan exactos; en la ecuación final se detecta fácilmente que los parámetros determinantotalmente el tipo de dispositivos para el control, lo que provoca que el sistema sea muy sensible a señales de ruido.
&&&&
x
x
x
x
M m
Mlg
m
Mg
x
x
x
x
Ml
M
u
yy
y x
x
x
y
y
x
1
2
3
4
1
2
3
4
1
2
1
3
1
2
0 1 0 0
0 0 0
0 0 0 1
0 0 0
01
01
1 0 0 0
0 0 1 0
=
+
−
+−
=
=
=
=
Como se considera que y x, como salidas se tienen.
Entonces.
θ
θ1
2
3
4
x
x
x
& ;
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( )
( )
x Ax Bu y Cx Du
x t e x e Bu d
y t Ce X c e Bu d Du
A
M m
mlg
m
Mg
B
A A tt
At A tt
= + = +
+
= + +
=
+
−
−
−
∫
∫
x = vector de estado A = Matriz de nxn
u = vector de control B = Matriz de nxr
y = vector de salida C = Matriz de mxn
D = Matriz de mxr
y estÆ dada por: y para
En matrices:
0
0
0 1 0 0
0 0 0
0 0 0 1
0 0 0
0
0
∂
∂
∂ ∂
∂ ∂
( )
=−
=
=
= −
= −−
01
01
1 0 0 0
0 0 1 01
2
1
Ml
M
Cy
y
u Kx K a T
T a
n n
n n
Como es un sistema de lazo cerrado; se toma como retroalimentaci n:
donde: = ( - )
inversa Matriz =
-1α
α
y esta dada por:

Comparación de los Sistemas Convencionales de Control y los Sistemas Difusos
36 polibits 1995
II.- Controladores Difusos
Introducción
Los controladores diseñados con lógica difusa,tratan de imitar el comportamiento humano; asícomo aprender de sus experiencias. Las siguien-tes son diversas metodologías de diseño Fuzzy, deacuerdo a diversos autores.
I. Sucesión de diseño ( H.J Zimmermann )
1.- Definición de entradas y variables de con-trol.
2.- Definición de reglas y fuzzy sets.3.- Desarrollo del mecanismo de inferencia.4.- Selección de la estrategia de fuzzificación .
II. Proceso Fuzzy (Greg Viot)
1.- Fuzzificación de entradas.2.- Evaluación de reglas.3.- Defuzzificación de salidas.
III. Configuración básica del modelado Fuzzy (Li-Xing-Wang)
1.- Interface de fuzzificación.2.- Reglas basadas en fuzzy.3.- Máquina de inferencia fuzzy.4.- Interface de defuzzificación.
Prácticamente no existe una teoría que indique los pasos a seguir del control Fuzzy; sin embargo, es posibleestablecer una metodología de diseño que permitadiseñar en orden, sobre todo ahorrar tiempo yevitar problemas en el desarrollo de los sistemas decontrol.
Un método aceptable propuesto por los auto-res para un sistema industrial es el siguiente:
Las técnicas que un operador aprende enbase a su experiencia, le sirven para contro-lar de mejor manera cualquier procesocomplejo. Estas pueden ser expresadas comoun conjunto de reglas Fuzzy de la siguienteforma: Condición -Acción, que no son otracosa que términos lingüísticos que descri-ben a los diferentes procesos.
X = Ax + Bu y = Cxy
y
1
2
K
K
K
K
1
2
3
4
--
-
X ,X ,X ,X1 2 3 4
Diagrama de bloques deducido por las f rmulas
u = Variable de control salida
Bloque, Retroalimentaci n variables y constantes
.
0.100
0.000
-0.100
1 2 3 4 5
bx (t) = x(t)3
0.000
-0.200
b
x (t) = x(t)4
.
x (t) = θ(t)2
.
x (t) =θ (t)1
1.000
0.0000.000
-0.400
a a
Representaci n grÆfica de la respuesta de retroalimentaci n,
determinada por la matriz K
1 2 3 4 5
1 2 3 4 51 2 3 4 5

VII 1 16 polibits 37
Comparación de los Sistemas Convencionales de Control y los Sistemas Difusos
A).- Observar al trabajador experto operando el proceso.
Observación del proceso y/o sistema físico a desarrollar , repitiendo este proceso cuentas veces sea necesario.
Se deben de tomar en cuenta la táctica y estrategia que utiliza el operador, la secuencia que sigue para todoslos procesos, la velocidad en que estos se realizan, asi como realizar el estudio de tiempos y movimientos, yconsiderar los aspectos ergonómicos del lugar de trabajo.
B).- Cuestionar al operador de dicho proceso.
Interrogar a los operadores del proceso a realizar, algunas de las dudas que surgieron en el paso anterior. Unade las tácticas más importantes son las de tomar en cuenta las opiniones de los operadorespara que nos ayuden a realizar de manera más eficaz el proceso de control.
C).- Definición del modelo funcional y las características de operación.
Determinar la arquitectura característica del sistema, describiendola en términos de un modelo entrada-proceso-salida.
Lógica Difusa para Control Aplicada al Pendulo Invertido
Regresando al ejemplo de péndulo invertido, para mantener el equilibrio del péndulo se debe desplazar el carrode un lado hacia el otro del eje x, para compensar los movimientos del péndulo.
Para la realización de este sistema se considera un motor que realice este proceso. Este motor debe de teneruna señal de control como el voltaje, que determina la velocidad y el sentido del giro.
Establecimiento de variables de control:
1.- Ángulo teta.2.- Incremento de desplazamiento. Delta del ángulo.3.- El voltaje aplicado al motor, Vm (+ , - ).
Implantación de un Sistema deControl Difuso con Servomecanismos
Como se observa se tienen dos estados varia-bles Fuzzy y una variable para el control.
- Un primer estado variable Fuzzy es elángulo del péndulo con la vertical. Se tiene unángulo nulo cuando el ángulo es cero. Losángulos positivos se consideran hacia el ladoderecho y los negativos hacia el izquierdo conrespecto a la vertical , y su intervalo es de -90 a+90 grados.
-Un segundo estado variable, es la velocidad angular de la delta, y se define como la diferencia entre el ángulopresente medido y el ángulo previo medido.
La diferencia de ángulos puede tomar valores positivos y negativos, por lo tanto el intervalo será desde +90a -90 grados.
Banda
Direcciones
poleas
Servomecanismo
Dc servo drivers
sensores
Amplificador de
senales de sensoresManejador Fuzzy
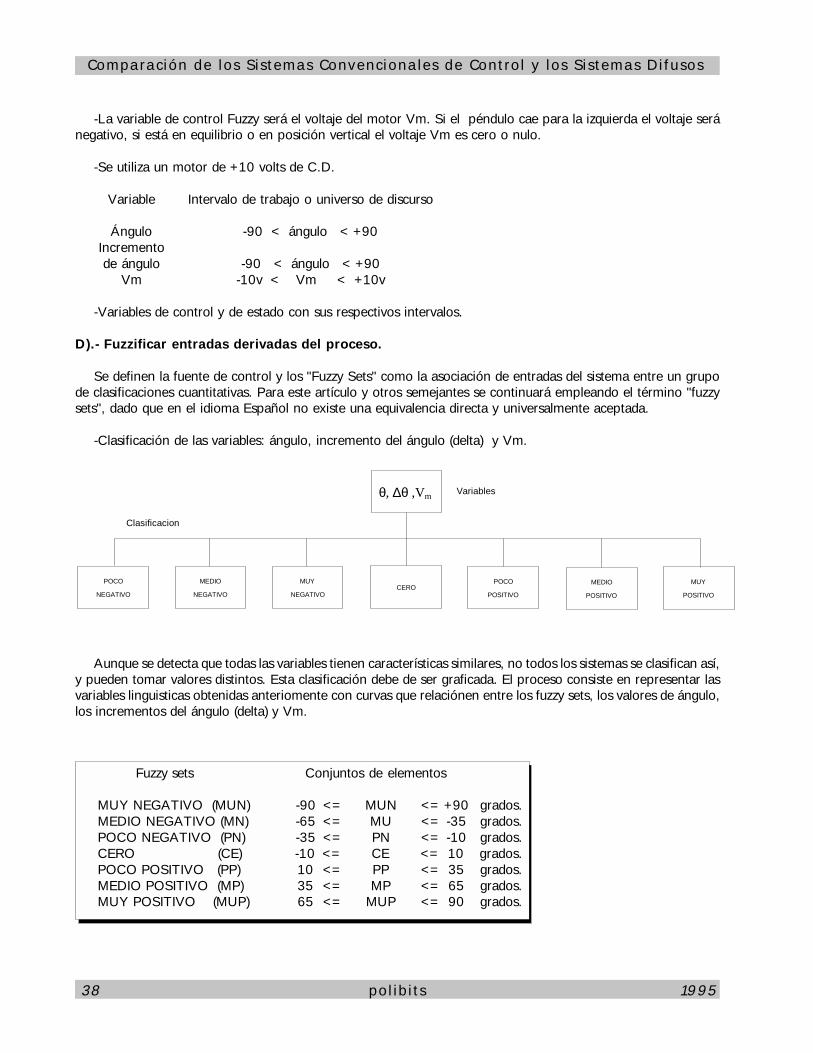
Comparación de los Sistemas Convencionales de Control y los Sistemas Difusos
38 polibits 1995
-La variable de control Fuzzy será el voltaje del motor Vm. Si el péndulo cae para la izquierda el voltaje seránegativo, si está en equilibrio o en posición vertical el voltaje Vm es cero o nulo.
-Se utiliza un motor de +10 volts de C.D.
Variable Intervalo de trabajo o universo de discurso
Ángulo -90 < ángulo < +90Incrementode ángulo -90 < ángulo < +90
Vm -10v < Vm < +10v
-Variables de control y de estado con sus respectivos intervalos.
D).- Fuzzificar entradas derivadas del proceso.
Se definen la fuente de control y los "Fuzzy Sets" como la asociación de entradas del sistema entre un grupode clasificaciones cuantitativas. Para este artículo y otros semejantes se continuará empleando el término "fuzzysets", dado que en el idioma Español no existe una equivalencia directa y universalmente aceptada.
-Clasificación de las variables: ángulo, incremento del ángulo (delta) y Vm.
POCO
NEGATIVO
MEDIO
NEGATIVO
MUY
NEGATIVOCERO
POCO
POSITIVO
MEDIO
POSITIVO
MUY
POSITIVO
Clasificacion
Variables θ, ∆θ ,Vm
Aunque se detecta que todas las variables tienen características similares, no todos los sistemas se clasifican así,y pueden tomar valores distintos. Esta clasificación debe de ser graficada. El proceso consiste en representar lasvariables linguisticas obtenidas anteriomente con curvas que relaciónen entre los fuzzy sets, los valores de ángulo,los incrementos del ángulo (delta) y Vm.
Fuzzy sets Conjuntos de elementos
MUY NEGATIVO (MUN) -90 <= MUN <= +90 grados.MEDIO NEGATIVO (MN) -65 <= MU <= -35 grados.POCO NEGATIVO (PN) -35 <= PN <= -10 grados.CERO (CE) -10 <= CE <= 10 grados.POCO POSITIVO (PP) 10 <= PP <= 35 grados.MEDIO POSITIVO (MP) 35 <= MP <= 65 grados.MUY POSITIVO (MUP) 65 <= MUP <= 90 grados.
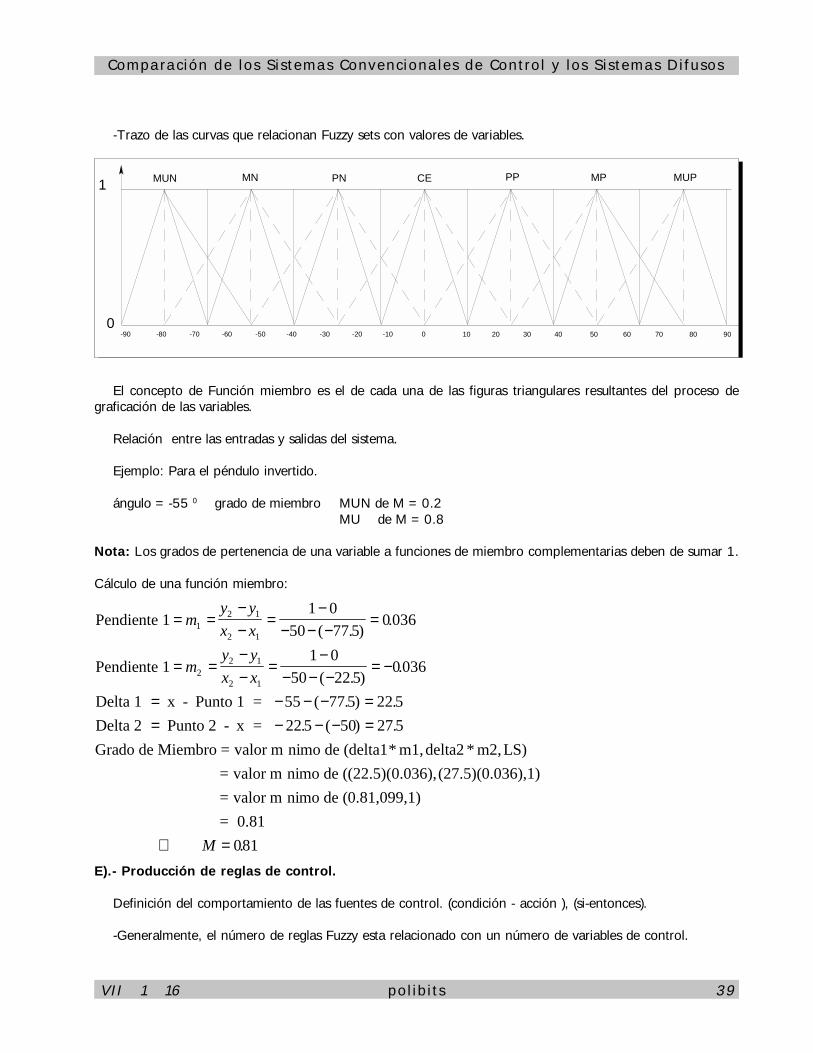
VII 1 16 polibits 39
Comparación de los Sistemas Convencionales de Control y los Sistemas Difusos
-Trazo de las curvas que relacionan Fuzzy sets con valores de variables.
El concepto de Función miembro es el de cada una de las figuras triangulares resultantes del proceso degraficación de las variables.
Relación entre las entradas y salidas del sistema.
Ejemplo: Para el péndulo invertido.
ángulo = -55 0 grado de miembro MUN de M = 0.2MU de M = 0.8
Nota: Los grados de pertenencia de una variable a funciones de miembro complementarias deben de sumar 1.
Cálculo de una función miembro:
E).- Producción de reglas de control.
Definición del comportamiento de las fuentes de control. (condición - acción ), (si-entonces).
-Generalmente, el número de reglas Fuzzy esta relacionado con un número de variables de control.
1
0
MUN MN PN CE PP MP MUP
0-90 -80 -70 -60 -50 -40 -30 -20 -10 10 20 30 40 50 60 70 80 90
Pendiente 1
Pendiente 1
Delta 1 x - Punto 1 =
Delta 2 Punto 2 - x =
Grado de Miembro = valor m nimo de (delta1* m1,delta2 * m2,LS)
= valor m nimo de ((22.5)(0.036),(27.5)(0.036),1)
= valor m nimo de (0.81,099,1)
= 0.81
= =−−
=−
− − −=
= =−−
=−
− − −= −
= − − − == − − − =
∴ =
my y
x x
my y
x x
M
12 1
2 1
22 1
2 1
1 0
50 77 50036
1 0
50 22 50036
55 77 5 22 5
22 5 50 27 5
081
( . ).
( . ).
( . ) .
. ( ) .
.

Comparación de los Sistemas Convencionales de Control y los Sistemas Difusos
40 polibits 1995
El sistema de péndulo invertido tiene dos con-troles variables: el ángulo y la velocidad angular; Sinembargo, se eligieron 7 regiones Fuzzy, lo que daun total de 7 * 7 = 49 combinaciones de entrada,por lo que el sistema requiere de 49 reglas Fuzzypara controlar el péndulo eficientemente.
F).- Desarrollo de reglas de inferencia.
Establecimiento de fórmulas, las cuales sondecisiones lógicas a través de la evaluación de reglasfuzzy determinando las salidas.
I.- Reglas Fuzzy. (Establecimiento)
Regla 1: Si ( ángulo= CE) y( Incremento del áng. = CE)
entonces ( Vm = CE).Regla 2: Si ( ángulo= CE) y
( incremento del áng. = PN)entonces ( Vm = PN).
Regla 3: Si ( ángulo= CE) y( incremento del áng. = MN)
entonces ( Vm= MN)....Regla 8: Si ( ángulo= PN) y
( incremento del áng. = CE)entonces (Vm = PN).
.
.Regla 49:Si ( ángulo= MUN) y
( incremento del äng. = MUP)entonces (Vm= CE).
El formato anterior ejemplifica la representación de las reglas Fuzzy.
II.-Producto lógico
Valor mínimo de todos los gra-dos de membresía. En la Regla 1 esde 0.81 de ángulo.
III.- Suma lógica
Combina los resultados de lasreglas. El área sombreada es elresultado para los valores de entra-da ( ángulo = -300 e incremento =300).
1
0
MN
DELTA 1 DELTA 2
-77.5 -50 -22.8
punto 1punto 2
pendiente 1
pendiente 2
(-50,1)
Limite
Superior (LS)
Grado de
membresia
(-77.5,0) (-22.5,0)
MUM MN PN CE PP MP MUP
SUMA LOGICA

VII 1 16 polibits 41
Comparación de los Sistemas Convencionales de Control y los Sistemas Difusos
G).- Defuzzificación de salidas para el control
Proceso mediante el cual el resultado obtenido, en el proceso de inferencia es transformada en un valornumérico.
1.- Ejemplo utilizando el méto-do de centro de gravedad.
a) Determinar un punto centralsobre el eje x. para cada función demiembro de salida.
b) Se toma en cuenta el grado demiembros de ajustes, obtenido conel producto lógico para cada fun-ción de miembro.
c) Se calculan las áreas de lasfunciones de miembro.
d) Finalmente la salida de fuzzifi-cación es derivada de un términopromedio o término pesado de lospuntos centrales del eje x y las areascalculadas.
Defuzzificación:
Salida 1 Salida 2a) Eje-x; punto central = 2.75 a) Eje-x; punto central = 5.5b) Grado de ajuste = 0.7 b) Grado de ajuste = 0.2c) Área sombreada c) Área sombreada
CE PP
Salida 1 Salida 2
Grado de
Miembro de
Ajuste
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1 2 3 4 5 6 7 8 9 10
A A
A A
A A
1 2
1 2
1 2
55 17
20 7 2 52
6 4 8
20 2 108
35
=+
= =
+
=
++
=
. .. .
.. .
( * ( *.
d) Termino medio pesado = punto central 1) punto central 2)
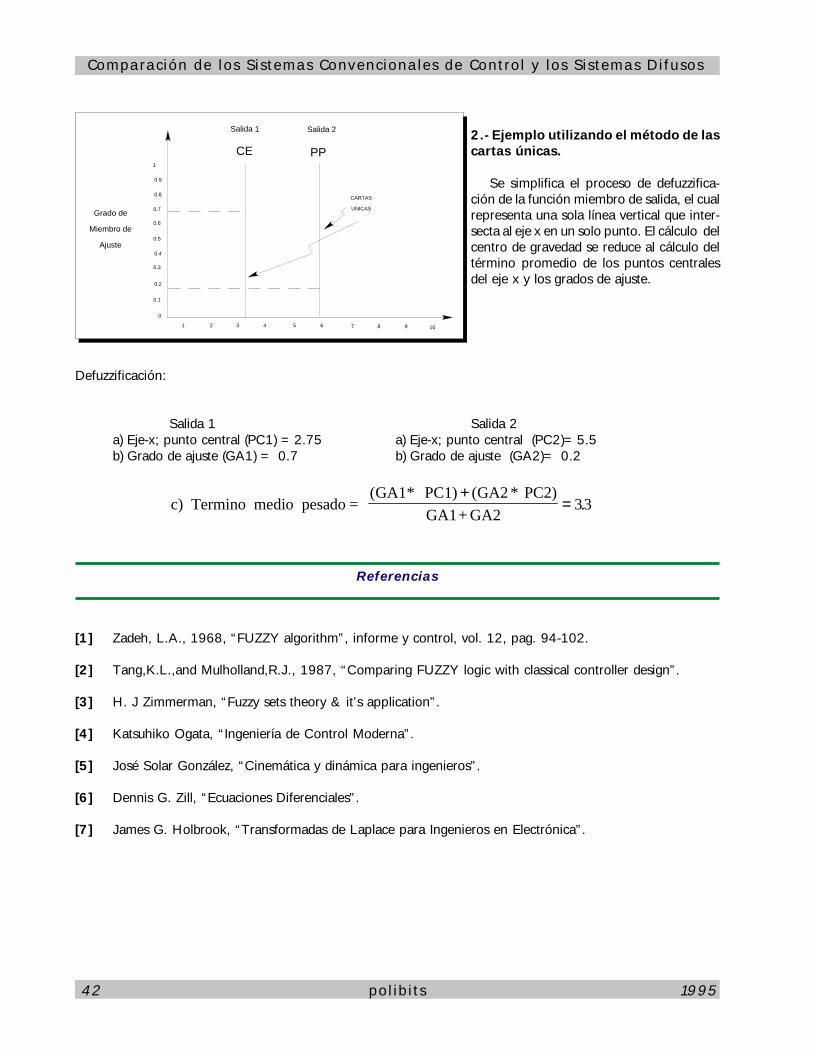
Comparación de los Sistemas Convencionales de Control y los Sistemas Difusos
42 polibits 1995
2.- Ejemplo utilizando el método de lascartas únicas.
Se simplifica el proceso de defuzzifica-ción de la función miembro de salida, el cualrepresenta una sola línea vertical que inter-secta al eje x en un solo punto. El cálculo delcentro de gravedad se reduce al cálculo deltérmino promedio de los puntos centralesdel eje x y los grados de ajuste.
Defuzzificación:
Salida 1 Salida 2a) Eje-x; punto central (PC1) = 2.75 a) Eje-x; punto central (PC2)= 5.5b) Grado de ajuste (GA1) = 0.7 b) Grado de ajuste (GA2)= 0.2
Referencias
[1] Zadeh, L.A., 1968, “FUZZY algorithm”, informe y control, vol. 12, pag. 94-102.
[2] Tang,K.L.,and Mulholland,R.J., 1987, “Comparing FUZZY logic with classical controller design”.
[3] H. J Zimmerman, “Fuzzy sets theory & it’s application”.
[4] Katsuhiko Ogata, “Ingeniería de Control Moderna”.
[5] José Solar González, “Cinemática y dinámica para ingenieros”.
[6] Dennis G. Zill, “Ecuaciones Diferenciales”.
[7] James G. Holbrook, “Transformadas de Laplace para Ingenieros en Electrónica”.
CE PP
Salida 1 Salida 2
Grado de
Miembro de
Ajuste
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1 2 3 4 5 6 7 8 9 10
CARTAS
UNICAS
c) Termino medio pesado = GA1 PC1) GA2 PC2)
GA1+ GA2
( * ( *.
+= 33

OBSERVACIONESSi te interesa contribuir con algún comentario o sugerencia, el ConsejoEditorial de la Revista Polibits agradecerá utilices este espacio.
#
Y lo remitas a :
Centro de Investigación Tecnológica en ComputaciónConsejo Editorial Revista POLIBITSAv. Té No. 950, Edificio de Graduados 2o. piso.Colonia Granjas México. C.P. 08400México D. F." 6-54-39-32, 6-49-50-36, 6-49-03-66 ext. 327. Fax : 6-57-74-53.
FAX 6-54-39-32 y 6-49-50-36 e-mail [email protected] tu contribución es en forma de un artículo, favor de anexar los siguientes datos:Nombre del autor, Grado Académico e Institución de procedencia.