politecnico di milano - politesi.polimi.it · 1775, il cui intento era quello di descrivere il...
TRANSCRIPT
i
POLITECNICO DI MILANO
Scuola di Ingegneria Industriale e dell’Informazione
Corso di Laurea Magistrale in Ingegneria Biomedica
ANALISI COMPUTAZIONE DEGLI EFFETTI DI
FLUSSO ELICOIDALE IN AORTA ASCENDENTE
RELATORE:
Prof. Christian Vergara
TESI DI LAUREA DI:
Luca Vito Francesco Magrì
Matr. 842097
____________________________________________________________
ANNO ACCADEMICO 2015/2016

ii

iii
L’uomo deve perseverare nell’idea che
l’incomprensibile sia comprensibile;
altrimenti rinuncerebbe a cercare.
J.W. Goethe
A Laura e alla mia famiglia, perché
dall’inizio mi hanno sostenuto e
appoggiato con insostituibile amore

iv
v
Indice
Abstract………………………………………………………………………………...xi
Sommario……………………………………………………………………………...xii
1 Introduzione………………………………………………………………………..1
1.1 Il moto elicoidale in aorta ascendente….....……………………………………...1
1.2 Emodinamica computazionale…………………………………………………..2
1.3 Obiettivo………………………………………………………………………...2
2 Fluidodinamica del sangue in aorta ascendente: fisiologia di base……………...5
2.1 Descrizione fisiopatologica del cuore………………...…………………………..5
2.1.1 Breve descrizione anatomica del cuore……………............………………..5
2.1.2 Valvola aortica bicuspide ……..........................................................……...7
2.1.3 Il ciclo cardiaco …………............................................................……….....8
2.2 Fluidodinamica in aorta ascendente………….………….......……….…………...9
2.2.1 Breve descrizione anatomica dell’aorta…………………………….............9
2.2.2 Flusso laminare o turbolento……………………………………................11
2.2.3 Fluidodinamica con valvola aortica bicuspide…………………………….13
2.2.4 Presenza di moto elicoidale……………………………………………….13
2.2.5 Studi computazionali……..……………………………………………….16
3 Descrizione matematica e numerica del problema…………………………….…19
3.1 Assunzioni generali……………………………………………………………..19
3.1.1 Modellazione del sangue………………………………………………….20
3.1.2 Assunzioni sul problema fisico……………………………………………20
3.2 Le equazioni di Navier-Stokes………………………………………………….21
3.3 Discretizzazione numerica……………………………………………………...25
3.3.1 Problema di Galerkin……………………………………………………...25
3.3.2 Metodo degli elementi finiti……………………………………………....26
3.3.3 Discretizzazione temporale……………………………………………….28
3.3.4 Stabilizzazione SUPG-PSPG……………………………………………..30
vi
4 Risultati numerici………………………………………………………………….31
4.1 Setting delle simulazioni numeriche…………………………………………….32
4.1.1 Mesh delle geometrie………………………………..................................32
4.1.2 Calcolo del contributo di velocità rotatoria……………………………..…34
4.1.3 Condizioni al bordo……………………………………………………….37
4.1.4 Setting del risolutore……………………………………………………...42
4.2 Indici fluidodinamici……………………………………………………............43
4.3 Cilindro……………………………………………………………....................44
4.3.1 Velocità……………………………………………………………….......45
4.3.2 WSS……………………………………………………………………....49
4.4 Aorta con valvola aortica tricuspide……………………………….....................51
4.4.1 Velocità…………………………………………………………………...52
4.4.2 WSS…………………………………………………………………........59
4.5 Aorta con valvola aortica bicuspide………………………………………..........62
4.5.1 Velocità…………………………………………………………………...63
4.5.2 WSS……………………………………………………………................68
Ringraziamenti………………………………………………………………………...71
Bibliografia………………………………………………………………………….....73

vii
Indice delle Figure
2.1 Schematizzazione del cuore: in evidenza le parti anatomiche principali……………6
2.2 Rappresentazione delle differenze tra valvola aortica tricuspide e valvola aortica
bicuspide…………………………………………………………………………………7
2.3 Pressioni e volumi che si raggiungono durante un battito cardiaco nel cuore sinistro...9
2.4 Schematizzazione delle varie sezioni che compongono l’aorta……………….…...10
2.5 Schematizzazione dei tre strati che compongono un’arteria: tonaca intima, tonaca
media e tonaca avventizia……………………………………………………………….11
2.6 Disegno schematico illustrativo di un flusso turbolento ed un flusso laminare……...12
2.7 Disegno schematico illustrativo di uno sviluppo del flusso aortico in un soggetto
sano……………………………………………………………………………………..15
3.1 Esempio di dominio Ω, il cui contorno ∂Ω è composto dalle due regioni ΓD e ΓN; è
inoltre rappresentata la normale n alla superficie del dominio…………………………23
4.1 Rappresentazione delle mesh utilizzate per le simulazioni, assieme al numero di
tetraedri e vertici: a sinistra la mesh di CYL, al centro la mesh della Aorta_TAV e a destra
la mesh dell’Aorta_BAV. In blu, sono state raffigurate le estremità della superficie di
inlet, coincidente con la configurazione a valvola aperta……………………………….34
4.2 Rappresentazione della mesh del cilindro: a sinistra una vista frontale, a destra una
vista posteriore. È indicata in arancione la superficie denominata “wall”, in blu la
superficie denominata “inlet” ed in verde la superficie denominata “outlet”……………38
4.3 A sinistra la rappresentazione della mesh dell’Aorta_TAV e a destra quella
dell’Aorta_BAV, in cui è indicata in arancione la superficie denominata “wall” e in giallo
la superficie denominata “inlet”………………………………………………………...38
4.4 A sinistra una vista dall’alto della mesh dell’aorta e a destra una vista laterale, in cui
sono indicate in arancione le superficie denominata “wall” e in verde le superfici
denominate “outlet”…………………………………………………………………….38
4.5 Rappresentazione dell’andamento del flusso sanguigno imposto alla sezione
d’ingresso del cilindro…………………………………………………………………..40
4.6 Raffigurazione semplificativa dell’imposizione all’inlet della velocità rotatoria per
Aorta_BAV……………………………………………………………………………..40
4.7 Confronto del campo di velocità alla sistole: da sinistra a destra i casi (a) CYL_0 e
(b) CYL_10……………………………………………………………………………..45
4.8 Confronto delle streamlines di velocità alla sistole: da sinistra a destra i casi (a)
CYL_0, (b) CYL_5, (c) CYL_10 e (d) CYL_15………………………………………..45

viii
4.9 Confronto delle streamlines di velocità in un istante di decelerazione del flusso (t =
0.23 s): da sinistra a destra i casi (a) CYL_0, (b) CYL_5, (c) CYL_10 e (d) CYL_15….46
4.10 Confronto del modulo della vorticità alla sistole: da sinistra a destra i casi (a) CYL_0,
(b) CYL_5, (c) CYL_10 e (d) CYL_15…………………………………………………47
4.11 Confronto del modulo del WSS alla sistole: da sinistra a destra i casi (a) CYL_0, (b)
CYL_5, (c) CYL_10 e (d) CYL_15…………………………………………………..…50
4.12 Confronto del modulo del TAWSS: da sinistra a destra i casi (a) CYL_0, (b) CYL_5,
(c) CYL_10 e (d) CYL_15……………………………………………………………...51
4.13 Confronto del campo di velocità alla sistole: a sinistra Aorta_TAV_0, a destra
Aorta_TAV_10…………………………………………………………………………52
4.14 Confronto del campo di velocità alla sistole: a sinistra Aorta_TAV_0, a destra
Aorta_TAV_10…………………………………………………………………………53
4.15 Confronto delle streamlines di velocità alla sistole: in alto Aorta_TAV_0, in basso
Aorta_TAV_10…………………………………………………………………………53
4.16 Confronto delle streamlines di velocità in un istante di decelerazione del flusso (t =
0.23 s): a sinistra Aorta_TAV_0, a destra Aorta_TAV_10……………………………...54
4.17 Confronto del modulo della vorticità alla sistole: a sinistra Aorta_TAV_0, a destra
Aorta_TAV_10…………………………………………………………………………55
4.18 Confronto di LNH alla sistole: a sinistra Aorta_TAV_0, a destra
Aorta_TAV_10…………………………………………………………………………58
4.19 Confronto del modulo del WSS alla sistole: a sinistra Aorta_TAV_0, a destra
Aorta_TAV_10…………………………………………………………………………59
4.20 Confronto del modulo del TAWSS: a sinistra Aorta_TAV_0, a destra
Aorta_TAV_10…………………………………………………………………………61
4.21 Confronto del campo di velocità alla sistole: a sinistra Aorta_BAV_0, a destra
Aorta_BAV_10…………………………………………………………………………63
4.22 Confronto del campo di velocità alla sistole: a sinistra Aorta_BAV_0, a destra
Aorta_BAV_10…………………………………………………………………………64
4.23 Confronto delle streamlines di velocità alla sistole: a sinistra Aorta_BAV_0, a destra
Aorta_BAV_10…………………………………………………………………………65
4.24 Confronto delle streamlines di velocità alla sistole: a sinistra Aorta_BAV_0, a destra
Aorta_BAV_10…………………………………………………………………………65
4.25 Confronto del modulo della vorticità alla sistole: a sinistra Aorta_BAV_0, a destra
Aorta_BAV_10…………………………………………………………………………66
4.26 Confronto di LNH alla sistole: a sinistra Aorta_BAV_0, a destra
Aorta_BAV_10…………………………………………………………………………67
4.27 Confronto del modulo del WSS alla sistole: a sinistra Aorta_BAV_0, a destra
Aorta_BAV_10…………………………………………………………………………68

ix
Indice delle Tabelle
4.1 Riassunto dei gradi di libertà per velocità e pressione per le tre mesh utilizzate……..42
4.2 Confronto delle velocità massime (in m/s) registrate per i 4 casi……….…………...47
4.3 Confronto dei valori (in 1/s) di Vormeanmean e Vormean
max …………………………...…...48
4.4 Confronto dei valori (in Pa) di WSSmeanmean e WSSmean
max ……………………………...50
4.5 Confronto dei valori (in 1/s) di Vormeanmean e Vormean
max ……………………………......55
4.6 Confronto dei valori (in 1/s) di Vorsistolemean e Vorsistole
max ………………….…………...56
4.7 Confronti dei valori di LNHsistolemean …………………………………………………..58
4.8 Confronto dei valori (in Pa) di WSSmeanmean e WSSmean
max …………………………...…60
4.9 Confronto dei valori (in Pa) di WSSsistolemean e WSSsistole
max …………………………….61
4.10 Confronto dei valori (in 1/s) di Vorsistolemean e Vorsistole
max ………………….……..…...66
4.11 Confronti dei valori di LNHsistolemean ……………………………………………..…..68
4.12 Confronto dei valori (in Pa) di WSSmeanmean e WSSmean
max ……………..…………...…69

x

xi
Abstract
Blood fluid dynamics in the ascending aorta has been widely studied due to its
complexity. The presence of helical flow in this artery has been generally accepted and
its causes can be traced back to the aortic arch curvature and to the ventricular torsion. In
this computational study, the rotational velocity due to the cardiac muscle contraction has
been modeled and used as the inlet boundary condition in real geometry aortas with both
tricuspid and bicuspid aortic valves. Aim of this work is to evaluate the effect of this
additional term on significant hemodynamics indexes, such as WSS and TAWSS. Based
on the achieved results, it is advisable to include this additional velocity term in
hemodynamic studies with a high-degree of detail when evaluating important fluid
dynamic indexes.

xii
Sommario
La fluidodinamica del sangue in aorta ascendente è oggetto di numerosi studi a causa
della complessità della materia. La presenza di moto elicoidale in questa arteria è ormai
accertata ed è possibile ricondurre alla curvatura dell’arco aortico e alla torsione
ventricolare le cause di tale moto. In questo studio computazionale si è modellato il
contributo di velocità rotatoria dovuto alla contrazione del muscolo cardiaco, al fine di
imporlo come condizione al contorno all’inlet di geometrie reali di aorte con valvola
aortica tricuspide e bicuspidi. L’obiettivo del presente lavoro è valutare l’incidenza di tale
apporto aggiuntivo su indici emodinamici significativi quali ad esempio WSS e TAWSS.
Dai risultati ottenuti, è possibile affermare come sia consigliabile includere tale termine
aggiuntivo di velocità in studi emodinamici in cui si voglia un elevato grado di dettaglio
nella valutazione di indici fluidodinamici importanti.
1
Capitolo 1
Introduzione
Sommario_____________________________________________________________
1.1 Il moto elicoidale in aorta ascendente……………….. …………………….1
1.2 Emodinamica computazionale.…………………………………………….2
1.3 Obiettivo...…………………………………………………………………...2
1.1 Il moto elicoidale in aorta ascendente
Il flusso sanguigno in aorta ascendente, a causa della sua complessità, è oggetto di
numerosi studi scientifici. Particolarmente importante è l’investigazione della presenza e
della successiva quantificazione di moto elicoidale all’interno di questa arteria: è ormai
accertato che l’emodinamica in aorta sia influenzata dalla curvatura dell’arco aortico [17]
e dalla torsione ventricolare durante la contrazione del muscolo cardiaco [26]. Tali fattori
contribuiscono a indurre fisiologicamente un moto elicoidale al flusso sanguigno: si è
visto come la presenza di elicità in aorta ascendente sia rilevante per ridurre l’ipossia in
aorta e come stabilizzi il flusso di sangue [59], particolarmente influenzato dall’alto
numero di Reynolds raggiunto [44, 46]. Questo moto è presente per tutta la durata del
ciclo cardiaco, dalla fase di eiezione sino alla diastole, quando il sangue, rimescolandosi,
genera moto elicoidale anche a valle dell’arco aortico [18].
2
1.2 Emodinamica computazionale
Uno dei primi approcci matematici nel campo medico è stato sviluppato da Eulero nel
1775, il cui intento era quello di descrivere il flusso sanguigno nelle arterie umane.
L’applicazione di modelli matematici era originariamente ristretto all’ingegneria
aerospaziale, ma negli ultimi decenni si sono sviluppati anche nel settore
bioingegneristico e medico [34, 36]. Le ragioni sono da imputare ad una richiesta sempre
maggiore da parte della comunità medica di studi quantitativi e scientificamente rigorosi,
associata ad un incremento della potenza di calcolo e a metodi di imaging sempre più
accurati.
L’utilizzo di metodi matematici per il settore medico è da ricollegare al vantaggio che
essi offrono: sono studi meno invasivi rispetto alle tradizionali investigazioni in vivo e
solitamente più adattabili in confronto agli studi in vitro.
In particolare, nel campo dell’emodinamica, tali metodi sono utilizzati per studiare
situazioni sia fisiologiche che patologiche del sistema circolatorio, con la prospettiva di
fornire indicazioni patient-specific nelle pianificazioni chirurgiche.
Solitamente vengono calcolate quantità fisiche, come ad esempio lo sforzo tangenziale,
quasi impossibili da misurare in vivo e in vitro, utilizzando geometrie reali grazie al
supporto di tecnologie non-invasive di acquisizione di dati e immagini.
1.3 Obiettivo
In questo lavoro di tesi sono state svolte simulazioni numeriche al fine di investigare la
fluidodinamica del flusso sanguigno in aorta ascendente. In particolare, sono state svolte
delle prove computazionali in geometrie reali di aorte ascendenti con valvole aortiche
tricuspidi e bicuspidi. È stato modellato ed introdotto nelle simulazioni il contributo di

3
moto elicoidale all’ingresso dell’arco aortico, presente fisiologicamente in aorta e dovuto
alla torsione ventricolare durante la contrazione del cuore.
L’obiettivo di questo studio è valutare l’incidenza che tale contributo aggiuntivo ha su
quantità emodinamiche significative quali ad esempio WSS e TAWSS, particolarmente
importanti in clinica. Inizialmente si è proceduto nella valutazione degli effetti di tale
contributo in una geometria semplice (cilindro) e successivamente si è passati a dei casi
reali, effettuando prove numeriche su geometrie vere con valvole aortiche tricuspidi e
bicuspidi.

4

5
Capitolo 2
Fluidodinamica del sangue in aorta ascendente:
fisiologia di base
Sommario_____________________________________________________________
2.1 Descrizione fisiopatologica del cuore………………...…………………….5
2.1.1 Breve descrizione anatomica del cuore……………..............……….….5
2.1.2 Valvola aortica bicuspide………………………………………………7
2.1.3 Il ciclo cardiaco ………….....................................................………….8
2.2 Fluidodinamica in aorta ascendente………….……………........…………9
2.2.1 Breve descrizione anatomica dell’aorta…………………..………….....9
2.2.2 Flusso laminare o turbolento…………………………………………..11
2.2.3 Fluidodinamica con valvola aortica bicuspide………………………...13
2.2.4 Presenza di moto elicoidale…………………………………………...13
2.2.5 Studi computazionali……..…………………………………………...16
2.1 Descrizione fisiologica del cuore
2.1.1 Breve descrizione anatomica del cuore
Il cuore è un organo cavo che ha la funzione di pompare sangue nelle arterie della
circolazione sistemica e polmonare e di raccolta dello stesso attraverso le vene. È
composto da quattro camere, due atri e due ventricoli (si veda Figura 2.1); ogni coppia di

6
atrio e ventricolo costituisce una delle due parti dell’organo: cuore destro e cuore sinistro.
Gli atri dai ventricoli sono separati fisicamente dalla valvola tricuspide nel cuore destro
e dalla valvola mitrale nel sinistro; i ventricoli, invece, sono connessi con l’arteria
polmonare e l’aorta, rispettivamente tramite la valvola polmonare e la valvola aortica. I
muscoli papillari, dislocati nei ventricoli, si attaccano a queste valvole attraverso le corde
tendinee, prevenendo così il loro prolasso durante la fase di chiusura.
La parete del cuore è composta fisiologicamente da tre strati: l’endocardio, ovvero lo
strato più interno e sottile, il miocardio, strato muscolare molto spesso, ed infine
l’epicardio, a sua volta circondato dal pericardio, membrana con la funzione di isolare
l’organo cuore da altre parti anatomiche vicine.
Figura 2.1: Schematizzazione del cuore: in evidenza le parti anatomiche principali

7
2.1.2 Valvola aortica bicuspide
La valvola aortica bicuspide (BAV) è la forma più diffusa di patologia congenita del
cuore, con un’incidenza sulla popolazione mondiale del 0.5-2% in cui sono presenti solo
due foglietti nella valvola aortica, invece che tre, come mostrato in Figura 2.2 [14]. Tale
patologia può essere associata ad un soffio cardiaco sistolico, la cui diagnosi è spesso
coadiuvata da ecocardiografia e MRI [25].
I metodi di classificazione di tale patologia sono svariate (ecocardiografica, anatomica) e
spesso in disaccordo. Due configurazioni sono però facilmente distinguibili: valvola
aortica bicuspide anteroposteriore, in cui è avvenuta una fusione dei due foglietti
coronarici; valvola aortica bicuspide latero-laterale, in cui è avvenuta una fusione del
foglietto coronarico destro con il foglietto non-coronarico [38].
Figura 2.2: Rappresentazione delle differenze tra valvola aortica tricuspide e valvola
aortica bicuspide
Tale patologia è spesso associata ad un aumento della prevalenza di dilatazione dell’arco
aortico ed aneurisma in regime valvolare funzionante quando comparato con la valvola
aortica tricuspide. È infatti stimato che circa il 40-60% dei pazienti affetti da BAV
presentano o presenteranno dilatazione aortica [41]. Le ragioni di questa incidenza sono

8
spesso controverse: da una parte si crede che sia un’origine genetica a condurre ad un
indebolimento della parete aortica [14], dall’altra si conferisce la causa più importante
alla fluidodinamica osservata in aorta ascendente, diversa rispetto al caso fisiologico [9].
Per tali motivi, in questo studio verrà esaminato sia il caso di aorta con valvola aortica
tricuspide, che quello con valvola aortica bicuspide.
2.1.3 Il ciclo cardiaco
L’eiezione di sangue dal ventricolo sinistro avviene ritmicamente secondo un ciclo ben
definito, detto appunto ciclo cardiaco, visibile in Figura 2.3, della durata complessiva di
circa 0.8 secondi. È solito distinguerlo in due parti: la sistole, ovvero la fase di contrazione
del cuore (circa 0.3 s) e la diastole, la fase di rilassamento del muscolo cardiaco (circa 0.5
s). Più dettagliatamente, si susseguono quattro parti ben distinte:
riempimento ventricolare: in seguito all’apertura della valvola mitrale, il sangue
inizia a riempire il ventricolo sinistro; successivamente avviene la sistole atriale,
ovvero la contrazione dell’atrio;
contrazione isovolumetrica: in questa fase avviene la chiusura della valvola
aortica; la contrazione del ventricolo causa un aumento della pressione
ventricolare pur senza alcun cambiamento in termini di volume di sangue grazie
alla sua caratteristica di incomprimibilità;
eiezione ventricolare: al raggiungimento di circa 70 mmHg, la valvola aortica si
apre, mentre la mitrale rimane chiusa, ed il sangue è libero di fluire all’interno
dell’aorta ascendente;
rilassamento isovolumetrico: la pressione ventricolare diminuisce drasticamente
a causa del continuo rilascio di energia del ventricolo con entrambe le valvole
chiuse, senza avere così cambiamenti in termini di volume di sangue.

9
Gli stessi meccanismi sopra elencati sono validi anche per il ciclo cardiaco del cuore
destro: l’unica differenza risiede nei valori di pressione raggiunti che sono nettamente più
bassi nell’atrio e ventricolo destro.
Figura 2.3: Pressioni e volumi che si raggiungono durante un battito cardiaco nel cuore
sinistro
2.2 Fluidodinamica in aorta ascendente
2.2.1 Breve descrizione anatomica dell’aorta
L’aorta, detta arteria magna, è la più importante e grande arteria nel corpo umano
(diametro di circa 2.5 cm); ha origine dal ventricolo sinistro del cuore e si estende fino
all’addome, dove si divide in due arterie più piccole (arterie iliache).
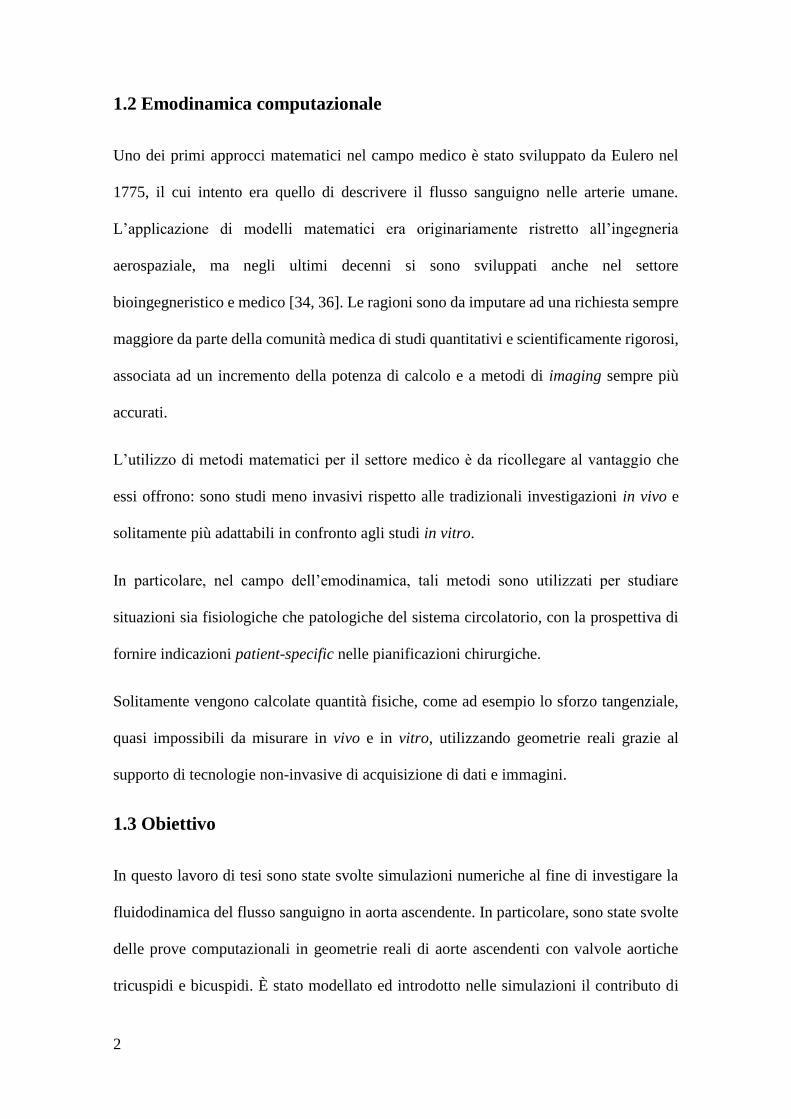
Un modo per classificare le diverse porzione dell’aorta, visibili in Figura 2.4, è mediante
la sua posizione anatomica: viene detta toracica la parte che va dal cuore allo iato
diaframmatico, addominale la restante porzione fino alla biforcazione. L’aorta toracica è
ulteriormente suddivisa nei segmenti ascendente, dell’arco (dall’origine del tronco
10
anonimo all’origine della succlavia di sinistra) e discendente (dal margine sinistro della
succlavia di sinistra fino allo iato diaframmatico).
Figura 2.4: Schematizzazione delle varie sezioni che compongono l’aorta
L’aorta ascendente è lunga circa 5 cm ed è formata da due parti distinte. Il segmento
inferiore è la radice aortica, che inizia a livello dell'anello fibroso aortico, si estende fino
alla giunzione senotubulare ed è la porzione dell’aorta ascendente più larga. Le inserzioni
delle tre cuspidi della valvola aortica sono sostenute dalla radice aortica, da cui sporgono
esternamente i tre seni di Valsalva che permettono la completa escursione dei lembi
valvolari aortici durante la sistole e da dove originano le due coronarie.
11
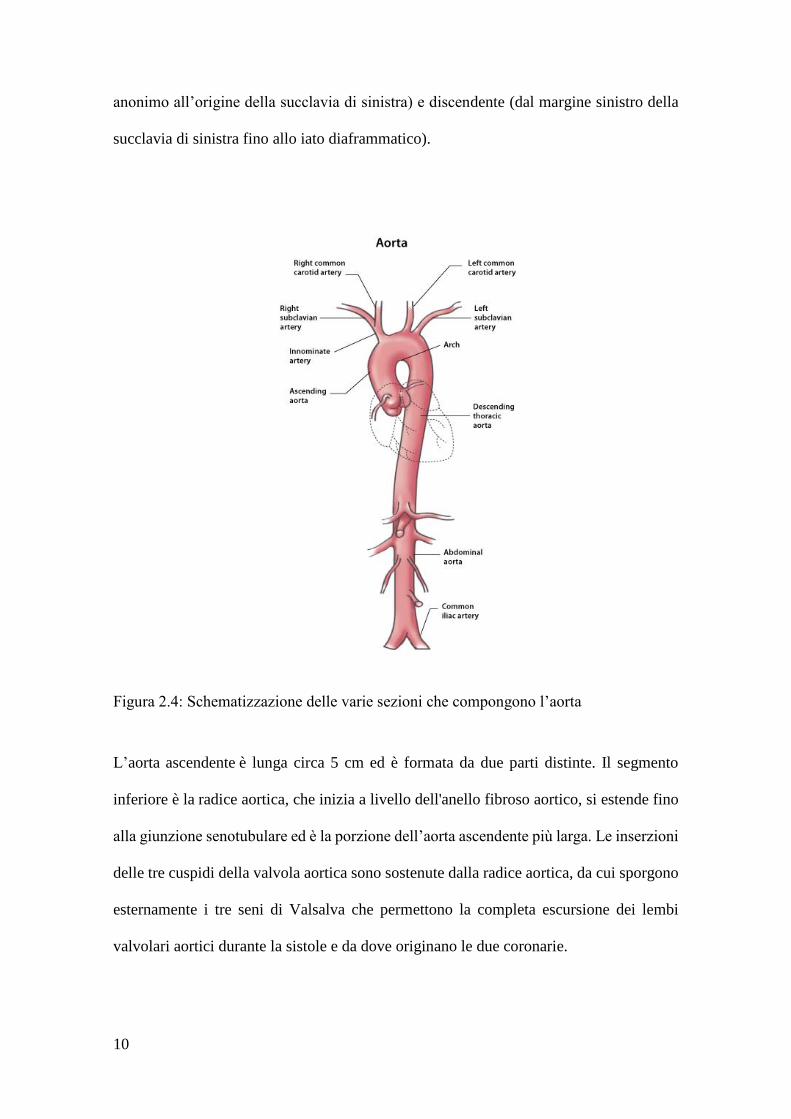
Tre tonache, mostrate in Figura 2.5, costituiscono istologicamente la parete dell’aorta:
intima, media ed avventizia:
La tonaca intima è costituita da uno strato di cellule endoteliali a diretto contatto
con il sangue che scorre lungo il vaso;
La tonaca media è costituita da cellule muscolari lisce e da tessuto elastico. Si
posiziona tra la tonaca intima e la tonaca avventizia;
La tonaca avventizia, lo strato più esterno, è composta principalmente da
collagene il quale ha la funzione di ancorare il vaso sanguigno agli organi
circostanti.
Figura 2.5: Schematizzazione dei tre strati che compongono un’arteria: tonaca intima,
tonaca media e tonaca avventizia
2.2.2 Flusso laminare o turbolento
In aorta ascendente, a causa delle sue notevoli dimensioni, si possono raggiungere numeri
di Reynolds molto elevati al picco sistolico (~4000). Tale numero è solitamente indicato
come valore di transizione tra un flusso laminare ed un flusso turbolento. Una
rappresentazione schematica è presente in Figura 2.6.
12
Numerosi studi si sono incentrati nel determinare qualora il flusso che si genera in aorta
ascendente durante il ciclo cardiaco possa essere considerato turbolento e quali sono gli
effetti di tale risultato sulla fisiologia del cuore [44, 46, 47].
Figura 2.6: Disegno schematico illustrativo di un flusso turbolento ed un flusso laminare
A causa della natura pulsatile del flusso sanguigno, non è possibile raggiungere uno stato
di turbolenza completamente sviluppato; il dibattito rimane aperto invece sulla possibilità
di incontrare alcuni effetti dello stadio di transizione misto a turbolenza: misurazioni
effettuate con MRI e hot-wire anemometry supportano tale idea [45, 48, 49]. Inoltre alcuni
autori hanno ipotizzato che il profilo di velocità elicoidale presente in aorta, causato dalla
natura torsionale della contrazione cardiaca, possa fungere da inibitore per la transizione
al flusso turbolento [26]. Per tale motivo quindi, la tesi per cui la turbolenza nel corpo
umano sano non è osservabile, prende credito.
Con i lavori di Stein e Sabbah [47] si è dimostrato come in presenza di uno stato
fisiopatologico (ad esempio stenosi aortica), la densità di energia turbolenta fosse più alta
rispetto ad un caso sano come conseguenza di un restringimento della sezione di
passaggio, risultando quindi in un aumento delle velocità raggiunte; sangue con un
ematocrito tra il 20% e il 30% scorre con una più alta intensità di turbolenza rispetto a
sangue con presenza di eritrociti fisiologica (45%).

13
2.2.3 Fluidodinamica con valvola aortica bicuspide
Come anticipato in Sezione 2.1.2, la fluidodinamica in aorta ascendente in presenza di
valvola aortica bicuspide risulta alterata rispetto al caso fisiologico con valvola aortica
tricuspide [9]. A supporto di tale teoria, studi ecocardiografici hanno trovato sforzi di
taglio massimi alla parete dell’arco aortico ascendente [2], mentre studi con risonanza
magnetica hanno evidenziato flussi aortici disturbati [16]. In particolare, la
fluidodinamica alla sistole in aorta ascendente con valvola bicuspide normalmente
funzionante presenta alcune particolarità [3, 55]:
flusso eccentrico in uscita dal ventricolo sinistro;
sforzi di taglio alla parete elevati;
alti flussi retrogradi;
presenza di flusso elicoidale, specialmente nei casi di arco dilatato.
Questi fattori, interconnessi l’un l’altro, aumentano la probabilità di formazione di
aneurisma rispetto al caso con valvola tricuspide, a causa di un progressivo allargamento
del tratto di aorta ascendente [1].
La differenza fluidodinamica rispetto al caso con valvola tricuspide può essere riscontrata
anche analizzando le streamlines delle due configurazioni durante prove numeriche: la
formazione di vortici è maggiormente evidenziata rispetto al caso fisiologico, in cui le
streamlines, invece, risultano parallele rispetto alla parete aortica.
2.2.4 Presenza di moto elicoidale
La meccanica del flusso sanguigno nelle arterie, ed in particolare in aorta, ha un ruolo
predominante per la salute degli individui. Numerosi studi sono stati svolti al fine di
visualizzare e successivamente quantificare la presenza di flusso elicoidale in un soggetto
sano. L’utilizzo tramite indici specifici potrebbe aiutare in fase diagnostica e terapeutica:

14
sarebbe possibile infatti caratterizzare e classificare il moto del sangue, in modo da poter
confrontare diversi gruppi di pazienti [8, 57].
Ad esempio, l’Helical Flow Index è stato utilizzato per avere una quantificazione accurata
del moto elicoidale presente in aorta: si è visto come l’emodinamica sistolica sia
caratterizzata da un flusso elicoidale in evoluzione (24% di differenza in termini di
quantità di elicità presente tra la mid e early systole) [26].
I lavori a riguardo presenti in letteratura distinguono tra varie tipologie di moto elicoidale,
classificandolo in base alla causa generante:
1. Moto elicoidale dovuto alla curvatura dell’arco aortico. La particolare geometria
dell’arco aortico incide significativamente sulla fluidodinamica del sangue, in quanto
provoca la formazione di flussi secondari elicoidali e retrogradi. Di fatti, in uno studio
effettuato da Kilner [17] si è visto, con metodi non invasivi, che 9 individui sani su 10
presentavano flusso elicoidale in aorta ascendente, che variava in base al raggio di
curvatura dell’arco stesso; tale risultato veniva replicato anche in un esperimento in vitro
simulando l’arco aortico con un tubo in plastica con le pareti corrugate [17]. I risultati di
un altro studio sul trasporto di lipoproteine a bassa densità (LDL) confermano quanto
precedentemente detto: la torsione aortica induce elicità, stabilizzando così il flusso
sanguigno e compensando gli effetti negativi della curvatura dell’aorta sul trasporto di
tali LDL; in particolare, il flusso elicoidale riduce il rischio di una polarizzazione grave
di LDL all’ingresso dei tre rami sull’arco aortico, evitando così la possibilità di
aterogenesi [24]. La presenza di elicità di questo genere è significativamente rilevante per
ridurre l’ipossia: tale informazione risulta utile nell’ambito della progettazione di device
vascolari a flusso rotatorio [59].
15
2. Moto elicoidale dovuto alla torsione ventricolare durante la contrazione. Studi in
letteratura dimostrano anche la presenza di un moto elicoidale dovuto alla torsione
ventricolare durante la contrazione. Ad esempio, è stato svolto un lavoro al fine di
quantificare la presenza in un soggetto sano di flusso elicoidale utilizzando tecniche come
la cine phase contrast MRI per ottenere una descrizione spazio-temporale completa dei
pattern tridimensionali del flusso sanguigno pulsatile in aorta. Il flusso elicoidale nella
prima parte della sistole è conseguenza dell’asimmetria del flusso sanguigno nel
ventricolo sinistro [26].
3. Moto elicoidale dovuto al rimescolamento del sangue nel tratto a valle dell’arco
aortico durante la diastole. Mappature di velocità con MRI hanno evidenziato la presenza
di flussi secondari durante la diastole: il sangue, infatti, si rimescola, generando moto
elicoidale [18].
Figura 2.7: Disegno schematico illustrativo di uno sviluppo del flusso aortico in un
soggetto sano

16
2.2.5 Studi computazionali
Altrettanto importanti nella ricerca medica, e scientifica in generale, sono gli studi di
carattere computazionale da affiancare agli esperimenti tradizionali in vitro ed in vivo,
spesso accompagnati, però, da limitazioni di natura pratica ed etica. La domanda
crescente da parte della comunità medica di studi sul sistema cardiovascolare sempre più
scientificamente rigorosi e quantitativi, ha portato allo sviluppo e all’applicazione di
modelli matematici al fine di interpretare la funzionalità del sistema circolatorio e
determinare alcune grandezze fisiche difficili o addirittura impossibili da misurare nei
pazienti come ad esempio il campo di velocità puntuale o lo sforzo tangenziale.
Differenti sono gli scopi dell’emodinamica computazionale:
determinazione della genesi e dello sviluppo di alcune patologie: ad esempio lo
studio numerico su arterie polmonari di neonati affetti da ipoplasia ventricolare
sinistra che ha permesso di chiarire l’impatto del sangue sullo sforzo superficiale
[23];
sviluppo di protesi: ad esempio lo studio numerico sui drug eluting stents nel
progettare la pellicola di rivestimento dello stent al fine di garantire un rilascio
ottimale del farmaco nel sangue [54, 60];
analisi degli effetti di tecniche chirurgiche: ad esempio lo studio sulla
fluidodinamica nelle carotidi dopo trattamento di endoarteriectomia [13];
determinazione ed ottimizzazione di alcuni parametri fisici [32].
Lo sviluppo della computational fluid dynamics (CFD) associato all’incremento della
potenza di calcolo ha fornito ai medici, ai bioingegneri e ai matematici un nuovo
strumento di indagine, ovvero gli esperimenti numerici (in silico).

17
Per quanto riguarda studi computazionali in aorta ascendente, in numerosi di essi sono
state utilizzate geometrie reali per le simulazioni: in generale si parte da immagini CT o
MRI e si ricostruisce tramite algoritmi di segmentazione le aorte degli individui coinvolti.
Valore aggiunto a questi studi è la non idealizzazione della geometria aortica, avendo
come vantaggio il fatto di poter aver soluzioni patient-specific. In termini di condizioni
al bordo all’inlet, però, non è stata aggiunta alcuna velocità rotatoria per modellare
l’effetto di swirl dovuto alla meccanica ventricolare, trascurando di fatti questo termine
[5, 6, 22].
Non sono stati trovati in letteratura lavori che includessero il contributo di velocità
rotatoria dovuto alla meccanica ventricolare associato a geometrie reali.
L’ambizione di questa tesi è quella di svolgere uno studio computazionale con l’obiettivo
di simulare il contributo elicoidale del flusso sanguigno in aorta con valvola tricuspide e
bicuspide dovuto al ventricolo sinistro e di valutarne l’impatto su quantità
fluidodinamiche significativa. È stata utilizzata una geometria reale dell’arco aortico di
un paziente, sia in caso di valvola aortica tricuspide che in caso di valvola aortica
bicuspide; come condizione al bordo all’inlet è stato imposto un contributo di velocità
rotatoria fisiologico oltre a quello assiale. L’obiettivo di questo lavoro è quindi valutare
l’incidenza che tale contributo aggiuntivo al profilo di velocità in ingresso ha su quantità
emodinamiche significative quali ad esempio WSS e TAWSS, particolarmente importanti
in clinica. La prima parte del lavoro si è incentrato nella valutazione di tale contributo in
una geometria semplice (cilindro) e successivamente si è passati a dei casi reali,
effettuando prove numeriche su geometrie vere con valvole aortiche tricuspidi e
bicuspidi.

18
La novità di questo studio risiede nel fatto di introdurre un contributo di velocità rotatoria
come condizione al bordo all’ingresso dell’aorta, al fine di poter stabilire quali sono gli
effetti complessivi di questo termine durante le simulazioni numeriche sulla
fluidodinamica nell’arco aortico e valutare quindi la necessità di includere tale termine in
successive prove.
19
Capitolo 3
Descrizione matematica e numerica del problema
Sommario_____________________________________________________________
3.1 Assunzioni generali………………...……………………………………...19
3.1.1 Modellazione del sangue……………….……………..............………20
3.1.2 Assunzioni sul problema fisico …................................……………….20
3.2 Le equazioni di Navier-Stokes………….……………........…………..…..21
3.3 Discretizzazione numerica………….……………........…………..………25
3.3.1 Problema di Galerkin……………….……………..............………......25
3.3.2 Metodo degli elementi finiti…………..…………..............………......26
3.3.3 Discretizzazione temporale…………………………………………...28
3.3.4 Stabilizzazione SUPG-PSPG….……………………………………...30
3.1 Assunzioni generali
Per descrivere matematicamente un problema riguardante la fluidodinamica del sangue è
necessario fare alcune assunzioni semplificative riguardanti le proprietà fisiche del
sangue e del problema fisico stesso. È evidente come queste scelte influenzeranno il
modello matematico e i risultati ottenuti, ma sono state adottate al fine di ottenere una
formulazione accurata per i nostri scopi trascurando degli effetti (come l’interazione con
la parete aortica) a questo livello non necessari [34, 35].
20
3.1.1 Modellazione del sangue
A causa della natura complessa del sangue si utilizzano alcune assunzioni semplificative
per definire un opportuno modello matematico in grado di descriverlo:
Fluido Newtoniano. Il sangue viene considerato in generale come fluido non-
Newtoniano, ovvero un fluido la cui viscosità varia a seconda dello sforzo di taglio
che viene applicato. Viene classificato come pseudoplastico poiché la viscosità
diminuisce all’aumentare dello sforzo di taglio: il valore minimo (3.5 cP, 1 P =
10-3 Pa·s) si registra ad alti shear rates (maggiori di 100 s-1). L’effetto Fahraeus-
Lindqvist, per cui si ha una diminuzione di viscosità in tubi di piccolo diametro,
non è presente in vasi di grosso calibro [40]. Risultano inoltre trascurabili le
dimensioni del corpuscolato (globuli rossi, globuli bianchi, piastrine) rispetto al
diametro del vaso [42]. Per tali motivo, in questo lavoro incentrato sull’aorta il
sangue verrà considerato come fluido Newtoniano con una viscosità di 3.5 cP.
Fluido omogeneo ed incomprimibile. In vasi di medio e grosso calibro, il sangue
può essere considerato come un fluido omogeneo, ovvero composto da una
singola fase. La densità del sangue viene assunta costante e pari a 1060 kg/m3,
poiché la comprimibilità del fluido può essere trascurata [50].
3.1.2 Assunzioni sul problema fisico
Il flusso di sangue potrà essere descritto dalle equazioni di Navier-Stokes per un fluido
incomprimibile, omogeneo e Newtoniano. Alcune assunzioni riguardano anche il
problema fisico:
Pareti rigide. L’ipotesi di utilizzare pareti rigide non è un’assunzione fisicamente
realistica, soprattutto nelle arterie, essendo gli spostamenti non trascurabili (ad
esempio in aorta sono dell’ordine dei millimetri) [49]. Questa semplificazione
permette di trascurare gli effetti dell’interazione tra il sangue e la parete arteriosa,

21
evitando così di utilizzare modelli FSI che complicherebbero ulteriormente il
problema. L’assunzione di pareti rigide può essere accettata se considerata come
punto di partenza di questo studio, focalizzandosi così sull’obiettivo finale, ovvero
la valutazione dell’incidenza del contributo di moto elicoidale su alcuni parametri
fisiologici [34].
Flusso laminare. Un regime laminare di flusso è stato assunto per tutto lo studio.
Le motivazioni di questa scelta sono state introdotte nella Sezione 2.2.2. Alcuni
lavori in letteratura sono incentrati su modelli di turbolenza in aorta [19, 20, 21,
30].
3.2 Le equazioni di Navier-Stokes
Le equazioni di Navier-Stokes sono un sistema di equazioni differenziali alle derivate
parziali che descrivono il comportamento di un fluido, ottenibili dalle leggi di
conservazione della massa e del momento [33].
Sia ρ = ρ(𝐱, t) la densità di un fluido in un dominio Ω ⊂ R3 e u = u(x, t) la sua velocità;
la legge di conservazione della massa può essere espressa come segue:
∂ρ
∂t+ ∇ ∙ (ρ𝐮) = 0, ∀𝐱 ∈ Ω, t ∈ (0, T]. (3.1)
Per un fluido omogeneo ed incomprimibile, la densità è costante, per cui la legge di
conservazione di cui sopra si semplifica
∇ ∙ 𝐮 = 0, ∀𝐱 ∈ Ω, t ∈ (0, T]. (3.2)
La legge di conservazione del momento conduce a
ρ [∂𝐮
∂t+ (𝐮 ∙ ∇)𝐮] − ∇ ∙ 𝐓 = ρ𝐟, ∀𝐱 ∈ Ω, t ∈ (0, T], (3.3)

22
dove 𝐓 è il tensore degli sforzi di Cauchy e 𝐟(𝐱, t) una forzante, la cui funzione è
rappresentare le forze che agiscono sul fluido. In emodinamica la 𝐟 rappresenta la forza
di gravità, e per tale motivo viene trascurata [34].
Ricordando l’espressione del tensore di Cauchy [33] per un fluido Newtoniano
incomprimibile, la legge di conservazione del momento si semplifica a
ρ [∂𝐮
∂t+ (𝐮 ∙ ∇)𝐮] + ∇P − ∇ ∙ [μ(∇𝐮 + (∇𝐮)T)] = ρ𝐟, ∀𝐱 ∈ Ω, t ∈ (0, T], (3.4)
indicando con P la pressione. Le due leggi di conservazione assieme portano alle
equazioni di Navier-Stokes per un fluido Newtoniano omogeno ed incomprimibile:
determinare 𝐮 e P tali che
{ρ∂𝐮
∂t− ∇ ∙ [μ(∇𝐮 + (∇𝐮)T)] + ρ(𝐮 ∙ ∇)𝐮 + ∇𝐏 = ρ𝐟, ∀𝐱 ∈ Ω, t ∈ (0, T],
∇ ∙ 𝐮 = 0 (3.5)
Per poter parlare di problema ben posto, è necessario imporre una condizione iniziale
𝐮(𝐱, 0) = 𝐮0(𝐱), ∀𝐱 ∈ Ω (3.6)
assieme alle condizioni al bordo, che possono essere di due tipi [35]: si può assegnare una
condizione di Dirichlet, che corrisponde ad un’imposizione di campo di velocità noto (ad
esempio è stata posta alla parete del vaso una condizione omogenea di questo tipo a causa
dell’ipotesi di parete rigida) [34]:
𝐮(𝐱, t) = 𝐠(𝐱, t), ∀𝐱 ∈ ΓD, (3.7)
oppure una condizione di Neumann che corrisponde a prescrivere uno sforzo applicato
[52]:
−P
ρ𝐧 +
μ
ρ(∇𝐮 + (∇𝐮)T)𝐧 = 𝐡(𝐱, t) , ∀𝐱 ∈ ΓN, (3.8)
∀𝐱 ∈ Ω, t ∈ (0, T]

23
𝐧
dove ΓD e ΓN sono le regioni del contorno ∂Ω tale che ΓD ∪ ΓN = ∂Ω, g e h sono funzioni
date, 𝐧 = 𝐧(𝐱) è il versore normale a ∂Ω, come mostrato in Figura 3.1 [15].
Figura 3.1: Esempio di dominio Ω, il cui contorno ∂Ω è composto dalle due regioni ΓD e ΓN; è inoltre rappresentata la normale n alla superficie del dominio.
Nell’ottica della discretizzazione numerica delle equazioni (3.5), (3.6), (3.7) e (3.8) si
introduce la cosiddetta formulazione debole del problema [35]. Sono elencati gli spazi
funzionali utili nella seguente trattazione matematica:
Q = L2(Ω),
𝐕D = [HΓD
1 (Ω)]3 = {𝐯 ∈ [H1(Ω)]3: 𝐯|ΓD = 𝟎},
𝐕g = {𝐯 ∈ [H1(Ω)]3: 𝐯|ΓD = 𝐠}, (3.9)
dove L2(Ω) e H1(Ω) sono spazi funzionali definiti come:
L2(Ω) = {v ∶ Ω → R ∶ ∫ v(𝐱)2dΩ
Ω
< +∞},
[H1(Ω)]3 = {𝐯 ∈ [L2(Ω)]3: ∇𝐯 ∈ [L2(Ω)]3x3}. (3.10)
𝚪𝐍
𝚪𝐃

24
Moltiplicando le equazioni di Navier-Stokes (3.5) rispettivamente per delle funzioni 𝐯 ∈
VD e q ∈ Q, e integrando su Ω, si presenta il seguente problema: dato 𝐮|t=0 = 𝐮0, si
trovino 𝐮 ∈ 𝐕g e p ∈ Q tali che, per ogni t ∈ (0, T]:
{(
∂𝐮
∂t, 𝐯) + a(𝐮, 𝐯) + c(𝐮, 𝐮, 𝐯) + b(p, 𝐯) = (𝐟, 𝐯) + (𝐡, 𝐯)L2(ΓN)
b(q, 𝐮) = 0, , (3.11)
per ogni 𝐯 ∈ 𝐕𝐃 e q ∈ Q.
Le seguenti notazioni sono state adottate:
(𝐯, 𝐰) = ∫ 𝐯 ∙ 𝐰
Ω
dΩ,
a(𝐯, 𝐰) = v ∫(∇𝐯 + (∇𝐯)T): ∇𝐰
Ω
dΩ
b(q, 𝐯) = − ∫ q∇ ∙ v
Ω
dΩ
c(𝐯, 𝐰, 𝐳) = ∫ (v ∙ ∇)𝐰 ∙ 𝐳Ω
dΩ (3.12)
La risoluzione di problemi in formulazione forte non garantisce di trovare una soluzione
classica ad un particolare problema, specialmente con domini complessi [33]. Per ovviare
a queste difficolta, si preferisce la formulazione debole del problema, appena esposta.
Inoltre, la formulazione debole è il “ponte” verso la discretizzazione numerica [35]. Come
vedremo nel prossimo paragrafo, la formulazione Elementi Finiti è una particolare
approssimazione della formulazione debole.

25
3.3 Discretizzazione numerica
Tramite i metodi numerici si ha la possibilità di trovare una soluzione approssimata del
problema, poiché è impossibile trovare una soluzione analitica delle equazioni di Navier-
Stokes. È necessario quindi effettuare una discretizzazione sia in spazio che in tempo: il
metodo degli elementi finiti verrà utilizzato per lo spazio, il metodo delle differenze finite
per il tempo [43].
3.3.1 Problema di Galerkin
Per poter determinare una soluzione numerica approssimata è necessario passare dalla
risoluzione di un problema definito in uno spazio continuo alla risoluzione di tale
problema in uno spazio discreto: lo spazio di Hilbert viene sostituito da sottospazi di
dimensione finita 𝐕h ⊂ 𝐕 e Qh ⊂ Q in cui trovare le soluzioni approssimate 𝐮h e 𝐩h [52].
𝐕 e Q sono spazi di test generici per velocità e pressione; h è riferito alla discretizzazione
del dominio, tale che, quando h → 0, 𝐕h e Qh risulteranno approssimazioni migliori per
gli spazi 𝐕 e Q [35].
Il problema esposto precedentemente (3.11) può essere riscritto utilizzando spazi e
soluzioni approssimati: data 𝐮0,h (approssimazione di 𝐮0), si trovino 𝐮h ∈ 𝐕g,h e ph ∈ Qh
tali che, per (quasi) ogni t ∈ (0, T]:
{(
∂𝐮h
∂t, 𝐯h) + a(𝐮h, 𝐯h) + c(𝐮h, 𝐮h, 𝐯h) + b(ph, 𝐯h) = (𝐟, 𝐯h) + (𝐡, 𝐯h)L2(ΓN)
b(qh, 𝐮h) = 0, , (3.13)
per ogni 𝐯h ∈ 𝐕D,h e qh ∈ Qh.
È necessario scegliere 𝐕h e Qh in modo tale che la condizione inf-sup discreta sia
verificata. Questo forza la scelta dei sottospazi 𝐕h e Qh che non possono essere scelti
arbitrariamente [33].

26
3.3.2 Metodo degli elementi finiti
Per la discretizzazione in spazio è necessario che il dominio Ω venga suddiviso in una
mesh Th, ovvero una triangolazione ad esempio composta da tetraedri [43]. Il dominio
discretizzato Ωh viene definito come
Ωh = int ( ⋃ K
K∈Th
) (3.14)
dove int(A) è la parte interna di A e K il generico tetraedro. Ωh può quindi essere ricoperto
dai tetraedri K. L’intersezione di due tetraedri può essere vuota o si può ridurre ad una
singola entità comune, come un vertice, uno spigolo o una faccia. I nodi della mesh Th
sono i vertici del tetraedro K che compone la mesh [34].
Sia hK la lunghezza dello spigolo dell’elemento più grande e ρK il diametro della più
grande sfera inscritta; la mesh deve essere regolare, ovvero deve esistere δ > 0 tale che
hK
ρK ≤ δ, ∀K ∈ Th. (3.15)
Sia Pr l’insieme dei polinomiali p con coefficienti scalari di R3 in R di grado inferiore o
uguale a r, con r = 1,2, …:
Pr = {p(x, y, z) = ∑ αijlxiyjzl, αijl ∈ R
0≤i+j+l≤r
}. (3.16)
Lo spazio degli elementi finiti può essere definito come lo spazio delle funzioni che sono
globalmente continue e polinomiali di ordine r sugli elementi K della mesh Th:
xhr : {vh ∈ C0(Ω): vh|K ∈ Pr, ∀K ∈ Th }. (3.17)

27
Si possono scegliere ora i seguenti spazi 𝐕h = [Xhr ]3 e Qh = Xh
s in merito al problema di
Galerkin (3.13) per la discretizzazione in spazio [33]. Ad esempio, scegliendo r=2 e s=1,
si ottengono gli elementi finiti P2-P1 che soddisfano la condizione inf-sup [35]; un altro
esempio di elementi finiti che soddisfa tale condizione sono gli elementi P1bolla-P1: si
aggiunge agli elementi P1-P1 un grado di libertà per ogni componente della velocità nei
baricentri dei tetraedri [43, 52]. Invece, gli elementi finiti Pr-Pr, con r ≥ 1, come ad
esempio P1-P1, sono instabili, ovvero non soddisfano la condizione inf-sup discreta: il
risultante sistema lineare è singolare [33]. Tuttavia, è possibile considerare elementi finiti
di ugual ordine purché si aggiunga un termine stabilizzante che permetta di rendere
coercivo il problema pur essendo violata la condizione inf-sup discreta: un esempio è dato
dalla stabilizzazione SUPG-PSPG [33]. Si veda la Sezione 3.3.4 per ulteriori dettagli in
merito a tale stabilizzazione.
Si può derivare ora la forma algebrica del problema di Galerkin. Siano φj e ψj le funzioni
di base di Vh e Qh. Si definisca 𝛗j(x)nel seguente modo:
𝛗j(𝐱) =
Tutte le funzioni di 𝐕h e Qh possono essere scritte come combinazione lineare delle basi:
𝐯h(𝐱) = ∑ vj𝛗j(𝐱)
3Nu
j=1
,
qh(𝐱) = ∑ qkψk(𝐱)
Np
k=1
, (3.18)
per j = 1, … , Nu
per j = Nu+1, … , 2Nu
per j = 2Nu+1, … , 3Nu ,

28
indicando con Nu e Np le dimensioni di Vh e Qh.
Notando che anche 𝐮h e ph si possono scrivere come combinazione lineare delle funzioni
di base, ovvero
uh(x, t) = ∑ uj(t)φj(x)
3Nu
j=1
,
ph(x, t) = ∑ pk(t)ψk(x)
Np
k=1
,
la formulazione algebrica delle equazioni di Navier-Stokes discrete è data dal sistema
non-lineare di equazioni differenziali:
{M
d𝐔
dt+ A𝐔 + C(𝐔)𝐔 + BT𝐏 = 𝐅 + 𝐇,
B𝐔 = 𝟎,
dove M = [mij] = (𝛗j, 𝛗i) è la matrice di massa, A = [aij] = a(𝛗j, 𝛗i) la matrice di
rigidezza, C(𝐔) = [cij] = c(𝐮h, 𝛗j, 𝛗i) la matrice relativa al termine convettivo
dell’equazione, B = [bij] = b(ψk, 𝛗j), 𝐅 = [fj] = (f, 𝛗j), 𝐇 = [hj] = (𝐡, 𝛗j)L2(ΓN). In
conclusione, 𝐔 = [uj] e 𝐏 = [pK] sono i vettori incogniti di velocità e pressione [43].
3.3.3 Discretizzazione temporale
Una volta discretizzato in spazio, è necessario procedere alla discretizzazione rispetto al
tempo: l’intervallo [0; T] può essere suddiviso in sotto-intervalli di grandezza costante
∆t, tale che tn = n∆t, n = 0,1, … .
Le derivate temporali sono state discretizzate seguendo la Backward Difference Formula
(BDF) di ordine uno, un metodo implicito. Per trattare la non-linearità, il campo
convettivo è invece trattato in esplicito, ottenendo per tale motivo un metodo semi-
(3.20)
(3.19)

29
implicito [14]. Il sistema lineare da risolvere ad ogni timestep è lineare: da qui il vantaggio
dell’utilizzo di questo metodo [33].
Siano 𝐔n e 𝐏n rispettivamente le approssimazioni di 𝐔(tn) e di 𝐏(tn), e ponendo
𝐆n+1 = 𝐅(tn+1) + 𝐇(tn+1), il sistema lineare derivante dalla discretizzazione spaziale
(3.20) può essere riscritto:
{M
𝐔n+1−𝐔n
∆t+ A𝐔n+1 + C(𝐔n)𝐔n+1 + BT𝐏n+1 = 𝐆n+1,
B𝐔n+1 = 𝟎.
La formulazione algebrica del problema discreto può essere descritta come il seguente
sistema lineare, da risolvere ad ogni timestep:
[1
∆tM + A + C(𝐔n) BT
B 0
] (𝐔n+1
𝐏n+1) = (
𝐆n+1 +1∆t M𝐔n
𝟎) .
Esiste una condizione che deve essere soddisfatta affinché un metodo semi-implicito sia
stabile [43]:
∆t ≤ βh
maxx∈Ω‖𝐮n‖ .
Tuttavia, tale vincolo non è severo alla luce della scelta del passo di discretizzazione, in
quanto, per questioni di accuratezza, la sua scelta è ben al di sotto del valore richiesto
dalla stabilità [33].
Nelle simulazioni presenti in questo lavoro è stato usato il metodo GMRES con un
precondizionatore di Schwarz a due livelli per la risoluzione del sistema algebrico. Per
maggiori dettagli riguardo questo metodo e altre possibili tecniche per l’approssimazione
numerica e la risoluzione delle equazioni di Navier-Stokes, si rimanda il lettore a [33],
[34] e [35].
(3.21)
(3.22)
(3.23)
30
3.3.4 Stabilizzazione SUPG-PSPG
Le equazioni di Navier-Stokes con la formulazione ad elementi finiti possono soffrire di
problemi di instabilità. Una delle possibili cause di instabilità è dovuta alla presenza di
un termine convettivo che domina il termine diffusivo: di fatti, in problemi fluidodinamici
con alti numeri di Reynolds, la richiesta di una mesh sufficientemente fine, con lo scopo
di ottenere risultati stabili [33], potrebbe rendere proibitivo il costo computazionale. Per
questo motivo, il problema di Navier-Stokes può essere stabilizzato permettendo di
utilizzare una mesh di calcolo non troppo fine. Per ovviare a tale problematica, ad
esempio, è possibile utilizzare una stabilizzazione Streamline-Upwind Petrov-Galerkin
(SUPG) [43]. Un’altra fonte di instabilità è la scelta di elementi finiti che non soddisfano
la condizione inf-sup discreta. Tale SUPG, in associazione con la stabilizzazione
Pressure-Stabilizing Petrov-Galerkin (PSPG), permette di controllare anche le instabilità
provocate dalla condizione inf-sup discreta [43].
La stabilizzazione SUPG-PSPG risulta consistente poiché è basata sull’aggiunta di
termini locali proporzionali al residuo dell’equazione del momento in forma forte [52].
Per tali motivi, in un problema di Navier-Stokes in cui il termine convettivo è dominante,
è possibile utilizzare gli elementi finiti P1-P1, in origine instabili, con la stabilizzazione
SUPG-PSPG per ovviare ai problemi causati dall’alto numero di Reynolds e dalla
condizione inf-sup discreta. L’utilizzo di tali elementi abbatte ulteriormente i tempi di
calcolo.

31
Capitolo 4
Risultati numerici
Sommario_____________________________________________________________
4.1 Setting delle simulazioni numeriche………………………………….…...32
4.1.1 Mesh delle geometrie……………................................…………….....32
4.1.2 Calcolo del contributo di velocità rotatoria..………..............…………34
4.1.3 Condizioni al bordo…………..…................................……………….37
4.1.4 Setting del risolutore…………………………………………………..42
4.2 Indici fluidodinamici……………….………………………………….…...43
4.3 Cilindro……………………………………………………………………..44
4.3.1 Velocità………………………………………………………………..45
4.3.2 WSS…………………………………………………………………...49
4.4 Aorta con valvola aortica tricuspide………………………………………51
4.4.1 Velocità………………………………………………………………..52
4.4.2 WSS…………………………………………………………………...57
4.5 Aorta con valvola aortica tricuspide………………………………………61
4.5.1 Velocità………………………………………………………………..62
4.5.2 WSS…………………………………………………………………...66

32
4.1 Setting delle simulazioni numeriche
Le simulazioni numeriche sono state effettuate con la libreria Elementi Finiti (FEM)
LifeV (versione 2.1.1) [23], una libreria open-source scritta in C++, sviluppata da una
collaborazione congiunta tra il Politecnico di Milano (MOX), École Polytechnique
Fédérale de Lausanne (CMCS) in Svizzera, INRIA (REO, ESTIME) in Francia e Emory
University (Sc. Comp.) negli USA. LifeV fornisce implementazioni allo stato dell’arte di
metodi matematici e numerici per la soluzione di equazioni alle derivate parziali con
FEM. La scelta di FEM è motivata dalla sua flessibilità nella gestione di geometrie
complesse assieme al suo background matematico rigoroso.
4.1.1 Mesh delle geometrie
Per la generazione delle mesh del cilindro (CYL) è stato utilizzato Tetgen [58], un
software open-source che permette di dividere qualsiasi geometria tridimensionale in
tetraedri, sfruttando una tipologia di triangolazione di Delaunay sviluppata dall’autore del
programma. Le dimensioni del cilindro utilizzato sono 75mm di lunghezza e 20mm di
diametro.
Per la generazione delle mesh dell’aorta con valvola aortica tricuspide (Aorta_TAV) e
dell’aorta con valvola aortica bicuspide (Aorta_BAV) si è utilizzato il Vascular Modeling
Toolkit (VMTK, versione 1.2) [56]. VMTK comprende numerose librerie e strumenti per
la ricostruzione 3D, l’analisi delle geometrie, la generazione delle mesh per modelli
image-based di vasi sanguigni.
33
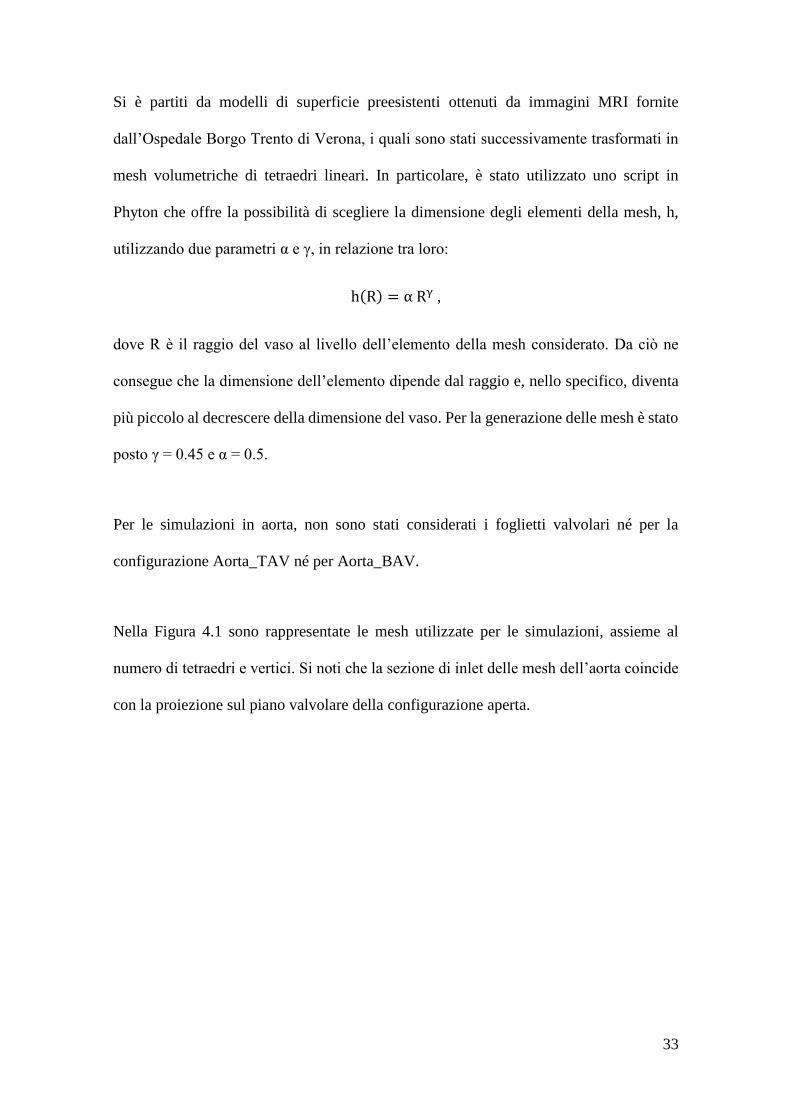
Si è partiti da modelli di superficie preesistenti ottenuti da immagini MRI fornite
dall’Ospedale Borgo Trento di Verona, i quali sono stati successivamente trasformati in
mesh volumetriche di tetraedri lineari. In particolare, è stato utilizzato uno script in
Phyton che offre la possibilità di scegliere la dimensione degli elementi della mesh, h,
utilizzando due parametri α e γ, in relazione tra loro:
h(R) = α Rγ ,
dove R è il raggio del vaso al livello dell’elemento della mesh considerato. Da ciò ne
consegue che la dimensione dell’elemento dipende dal raggio e, nello specifico, diventa
più piccolo al decrescere della dimensione del vaso. Per la generazione delle mesh è stato
posto γ = 0.45 e α = 0.5.
Per le simulazioni in aorta, non sono stati considerati i foglietti valvolari né per la
configurazione Aorta_TAV né per Aorta_BAV.
Nella Figura 4.1 sono rappresentate le mesh utilizzate per le simulazioni, assieme al
numero di tetraedri e vertici. Si noti che la sezione di inlet delle mesh dell’aorta coincide
con la proiezione sul piano valvolare della configurazione aperta.
34
Tetraedri Vertici
CYL 120966 23398
Aorta_TAV 597526 100899
Aorta_BAV 600444 101346
Figura 4.1: Rappresentazione delle mesh utilizzate per le simulazioni, assieme al numero
di tetraedri e vertici: a sinistra la mesh di CYL, al centro la mesh della Aorta_TAV e a
destra la mesh dell’Aorta_BAV. In blu, sono state raffigurate le estremità della superficie
di inlet, coincidente con la configurazione a valvola aperta.
4.1.2 Calcolo del contributo di velocità rotatoria
In questa parte verrà esposto il procedimento utilizzato per calcolare il contributo di
velocità rotatoria alla sezione di ingresso. Infatti, come detto, l’obiettivo di questo lavoro
è quello di valutare l’incidenza che tale contributo aggiuntivo al profilo di velocità in
ingresso ha su quantità emodinamiche significative.
Sia Q(t) il dato di partenza del problema, ovvero il flusso sanguigno da imporre alla
sezione di ingresso delle geometrie, e ω la velocità angolare a cui è soggetto il sangue
all’ingresso dell’arco aortico. Per poter quantificare il valore di tale velocità angolare ω
da imporre successivamente nelle simulazioni numeriche, si è partiti da uno studio in
letteratura in cui venivano misurate le velocità assiali e non-assiali massime registrate alla
sistole [17].

35
In particolare, sono state fatte le seguenti ipotesi:
Ipotesi 1. L’andamento nel tempo della velocità rotatoria massima in spazio è uguale, a
meno di un fattore moltiplicativo β, all’andamento nel tempo della velocità assiale media
in spazio.
Ipotesi 2. Non avendo a disposizione dati riguardanti le velocità massime in spazio se non
al picco sistolico, tale coefficiente β non risulta essere funzione del tempo, bensì assume
un valore costante per l’intero battito cardiaco.
Dal dato di flusso sanguigno Q(t) è possibile calcolare ad ogni instante di tempo la
velocità media in spazio vASSIALEmedia (t), definita come segue:
vASSIALEmedia (t) =
Q(t)
Ainlet, (4.1)
dove Ainlet è l’area della sezione di ingresso della geometria presa in considerazione. La
velocità assiale media in spazio vASSIALEmedia (t), sarà massima in tempo all’istante della
sistole, in cui anche Q(t) è massima: ci riferiremo a questa quantità nel seguito come
vASSIALEmedia,max
.
Supponiamo di conoscere dai dati di letteratura la velocità rotatoria all’inlet massima in
spazio ed in tempo. Ci riferiremo a questa quantità nel seguito come vROTmax,max
. Grazie alle
ipotesi 1 e 2, possiamo introdurre il seguente fattore di proporzionalità β definito come
segue:
β =vROT
max,max
vASSIALEmedia,max , (4.2)
ovvero il rapporto tra la velocità rotatoria massima in spazio ed in tempo vROTmax,max e la
velocità assiale media in spazio e massima in tempo vASSIALEmedia,max
. Come detto, il valore di
β è calcolabile in pratica conoscendo il flusso sistolico imposto ed una stima della velocità
36
rotatoria massima. Indichiamo con vROTmax(t) l’andamento nel tempo della velocità rotatoria
massima in spazio, raggiunta vicina al bordo dell’inlet.
Grazie all’ipotesi 2, essa è definita da vROTmax(t) = β ∙ vASSIALE
media (t) (4.3), che è una quantità
nota grazie alle (4.1) e (4.2).
Notiamo che la velocità rotatoria massima in spazio vROTmax(t) è comunque nulla al bordo
per compatibilità con la no-slip condition imposta su Γwall (si veda Sezione 4.1.3 per
maggiori dettagli).
Ricordando che la velocità rotatoria massima è ubicata nei punti in prossimità del bordo,
è possibile ricavare la velocità angolare ω:
ω(t) =vROT
max(t)
(R−h), (4.4)
indicando con R il raggio della sezione di inlet e con h la dimensione del tetraedro della
mesh.
Dalla (4.3) e (4.4), l’espressione della velocità angolare può essere riscritta nel seguente
modo:
ω(t) =vASSIALE
media (t)∙β
(R−h) . (4.5)
In conclusione, le componenti lungo x e y della velocità rotatoria, rispettivamente
vROT,x(y, t) e vROT,y(x, t) da imporre all’ingresso avranno la seguente espressione:
vROT,x(y, t) = −vASSIALE
media (t) β
(R−h)y ,
vROT,y(x, t) = vASSIALE
media (t) β
(R−h)x . (4.6)

37
Il valore di β usato nelle simulazioni di questo lavoro è stato per l’appunto ricavato dai
valori trovati in letteratura [17], immessi nella (4.2): la velocità assiale media in spazio e
massima in tempo vASSIALEmedia,max
risulta essere dai dati di letteratura pari a circa 150 cm/s,
mentre la velocità rotatoria massima in spazio e massima in tempo vROTmax,max
risulta essere
pari a circa 15 cm/s. Dunque, il valore di β nel caso fisiologico è pari a 0.10.
Le prove numeriche nel cilindro, con l’imposizione all’inlet di un profilo parabolico, sono
state svolte quindi con β = 0.10, da confrontare con il caso senza contributo aggiuntivo
(β = 0). Per analizzare la sensitività dei risultati, ulteriori simulazioni sono state
considerate nel caso di geometria cilindrica al variare di β: in particolare è stato scelto
β = 0.05 e β = 0.15, rispettivamente pari al 50% e al 150% del valore fisiologico di β.
Le simulazioni in aorta sono state svolte con β = 0 e β = 0.10.
4.1.3 Condizioni al bordo
Come anticipato nella Sezione 3.2, è necessario imporre delle condizioni al bordo
appropriate alle sezioni fisiche ed artificiali del dominio computazionale, ovvero alla
parete, all’inlet e agli outlet. In questa sezione verranno spiegate dettagliatamente le scelte
riguardanti le condizioni al bordo imposte.
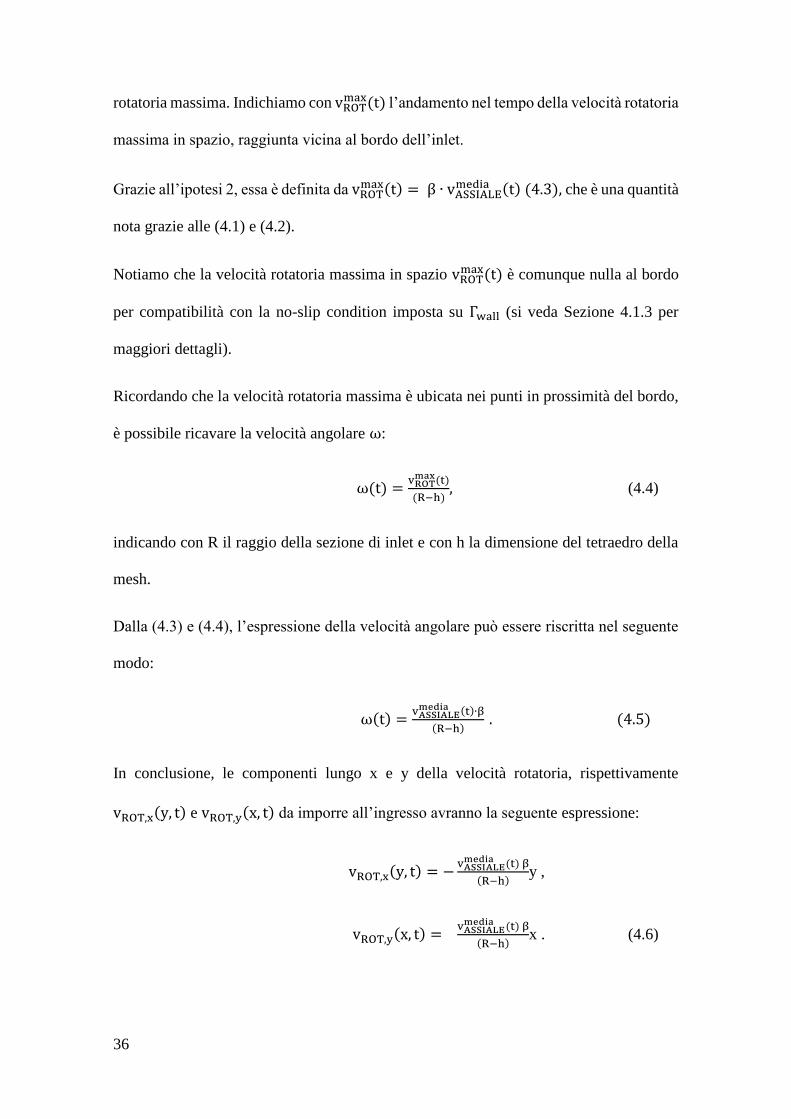
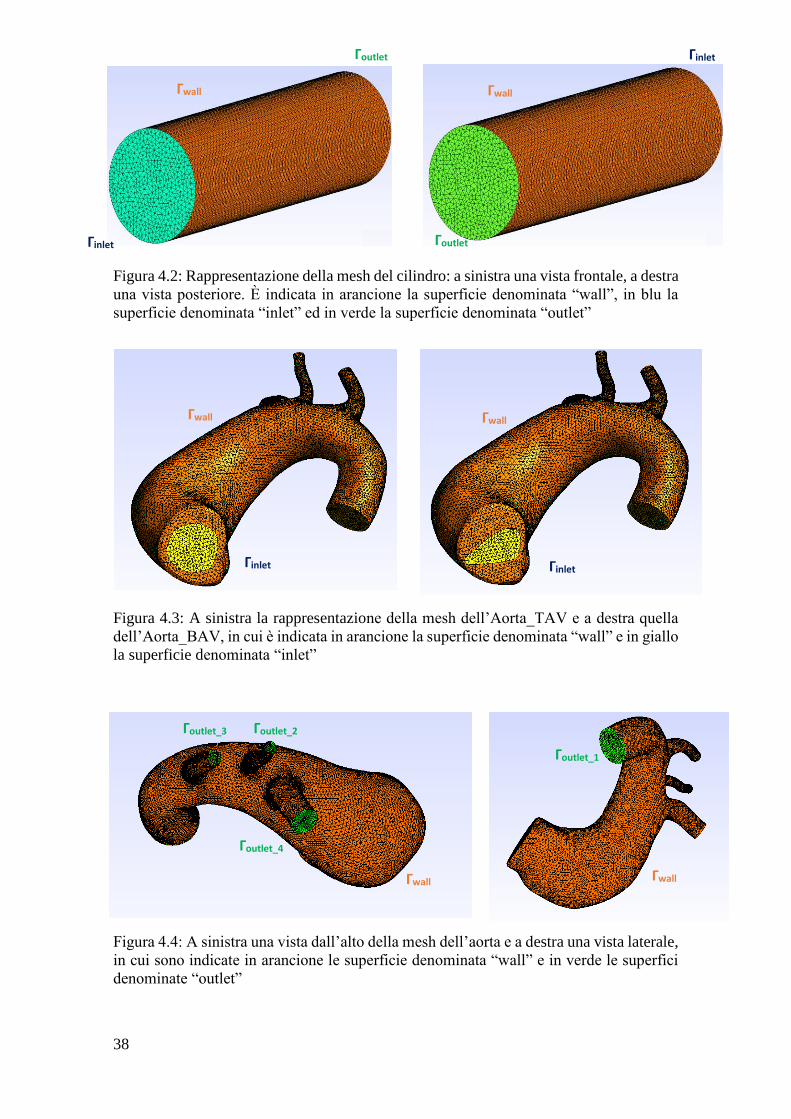
Nelle Figure 4.2, 4.3 e 4.4 sono raffigurate le mesh di volume delle geometrie considerate,
in cui sono state indicate le superfici dove imporre le condizioni al bordo.
38
Figura 4.2: Rappresentazione della mesh del cilindro: a sinistra una vista frontale, a destra
una vista posteriore. È indicata in arancione la superficie denominata “wall”, in blu la
superficie denominata “inlet” ed in verde la superficie denominata “outlet”
Figura 4.3: A sinistra la rappresentazione della mesh dell’Aorta_TAV e a destra quella
dell’Aorta_BAV, in cui è indicata in arancione la superficie denominata “wall” e in giallo
la superficie denominata “inlet”
Figura 4.4: A sinistra una vista dall’alto della mesh dell’aorta e a destra una vista laterale,
in cui sono indicate in arancione le superficie denominata “wall” e in verde le superfici
denominate “outlet”
Γwall Γwall
Γinlet Γinlet
Γwall Γwall
Γoutlet
Γinlet Γoutlet
Γwall
Γwall
Γoutlet_4
Γoutlet_1
Γoutlet_3 Γoutlet_2
Γinlet

39
Parete
Sia nelle simulazioni del cilindro che in quelle dell’aorta, le pareti delle geometrie sono
state considerate rigide ed una no-slip condition (aderenza completa tra parete e fluido) è
stata imposta [34].
Dunque, è stata scelta una condizione di Dirichlet omogenea su Γwall, ovvero velocità
nulla:
𝐮(𝐱, t) = 0, ∀𝐱 ∈ Γwall .
Inlet
Per quanto riguarda le simulazioni del cilindro, è stato imposto un profilo parabolico di
velocità alla sezione di ingresso. Tale profilo è stato ottenuto partendo dall’andamento
del flusso sanguigno durante un ciclo cardiaco. Il picco sistolico raggiunge i 250 cm3
s ed
il suo andamento è esposto in Figura 4.5:
vZcyl(r, t) = 2 ∙
Q(t)
Acil∙ (1 − (
r
R)
2
) su Γinlet . (4.7)
Nelle simulazioni di Aorta_TAV ed Aorta_BAV, invece, si è preferito imporre un profilo
piatto all’ingresso dell’aorta:
vZaorta(r, t) =
Q(t)
Aaorta su Γinlet . (4.8)
Questa scelta di condizione al bordo è stata già effettuata in altri lavori riguardanti
l’emodinamica in aorta [6, 28, 36].
Per tutte le geometrie sono state eseguite simulazioni con imposizione di sola velocità
assiale, e simulazioni con l’aggiunta del contributo di velocità rotatoria. I valori di β

40
utilizzati per il cilindro sono: 0, 0.05, 0.10, 0.15; i valori di β utilizzati per le aorte sono
0 e 0.10.
Figura 4.5: Rappresentazione dell’andamento del flusso sanguigno imposto alla sezione
d’ingresso del cilindro
Nelle simulazioni di Aorta_BAV la velocità rotatoria è stata imposta in maniera diversa
rispetto al caso tricuspide: non avendo una sezione di ingresso circolare come nel caso di
Aorta_TAV, è stato ipotizzato che la velocità rotatoria fosse da imporre su una
circonferenza immaginaria di inlet di diametro pari a quella del caso di Aorta_TAV.
In Figura 4.6 una raffigurazione semplificativa dell’imposizione all’inlet della velocità
rotatoria per Aorta_BAV:
Figura 4.6: Raffigurazione semplificativa dell’imposizione all’inlet della velocità
rotatoria per Aorta_BAV
ΓT
ΓB
41
Nella figura sopra è possibile vedere, delimitato in blu, il vero accesso all’arco aortico
per la configurazione con valvola bicuspide (ΓB); in arancione, invece, è raffigurata la
circonferenza di ingresso per la configurazione con valvola tricuspide (ΓT). Per le
simulazioni numeriche si è proceduto come di seguito:
Nodi contenuti in ΓB e ΓT: imposizione di velocità assiale; imposizione di velocità
rotatoria definita in Sezione 4.1.2: la velocità massima rotatoria si avrà vicino al
bordo di ΓT;
Nodi contenuti in ΓB ma non in ΓT: imposizione di velocità assiale; imposizione
di velocità rotatoria con valore costante e pari al valore di velocità massima
rotatoria raggiunta vicino al bordo di ΓT.
Outlet
Sia nelle simulazioni del cilindro (Γoutlet) che in quelle dell’aorta (sezione distale dell’arco
aortico Γoutlet_1, arteria carotide comune sinistra Γoutlet_2, arteria succlavia sinistra Γoutlet_3,
arteria brachiocefalica Γoutlet_4), una condizione di Neumann omogena è stata imposta.
Questa condizione risulta in un’imposizione di una pressione nulla ad ogni punto della
sezione di uscita, quando viene prescritta per una superficie piatta perpendicolare all’asse
del vaso. La condizione di Neumann omogenea imposta ad almeno un outlet è necessaria
per garantire la conservazione della massa [34]. Questa scelta è stata fatta anche perché
la regione di vero interesse, cioè l’arco aortico, risulta lontano da questi outlet. Anche in
altri lavori riguardanti la fluidodinamica in aorta ascendete è stata imposta questa
condizione al contorno in uscita [3, 31, 55].

42
4.1.4 Setting del risolutore
Per la discretizzazione numerica, ed in particolare per risoluzione del sistema lineare
(3.22) ad ogni timestep, è stato usato il metodo GMRES con un precondizionatore di
Schwarz a due livelli. La convergenza era considerata raggiunta quando il residuo
normalizzato raggiungeva un valore di 10-10. Gli elementi finiti scelti sono stati P1bolla-P1
per le simulazioni del cilindro e dell’aorta con valvola aortica tricuspide. Questa decisione
permetteva che la condizione inf-sup, necessaria affinché il problema risultasse ben posto,
fosse soddisfatta [33]. Con tale scelta, il numero di gradi di libertà corrisponde a (3Nv +
Nt) per la velocità e Nv per la pressione, dove Nv e Nt rappresentava rispettivamente il
numero di vertici e di tetraedri della mesh. Per le simulazioni dell’aorta con valvola
aortica bicuspide, invece, dove si raggiungevano numeri di Reynolds più alti, sono stati
scelti gli elementi finiti P1-P1 con stabilizzazione SUPG-PSPG [19]. Si veda Sezione
3.3.4 per ulteriori dettagli in merito alla stabilizzazione. Infine, un timestep di 0.01s è
stato impostato per la discretizzazione in tempo.
Velocità Pressione
CYL 191160 23398
Aorta_TAV 900223 100899
Aorta_BAV 101346 101346
Tabella 4.1: Riassunto dei gradi di libertà per velocità e pressione per le tre mesh utilizzate
43
4.2 Indici fluidodinamici
Per un’analisi quantitativa dell’emodinamica in aorta, alcuni indici specifici sono stati
presi in considerazione, al fine di valutare le eventuali differenze che si presentano tra il
caso di flusso solo assiale e i casi di flusso con contributo aggiuntivo di velocità rotatoria
all’inlet. In prima analisi è stato visualizzato il campo di velocità, con lo scopo di
visualizzare variazioni in termini di modulo della massima velocità. In particolare è stato
fatto un confronto tra il campo di velocità e le streamlines di velocità alla sistole e in un
istante in fase di decelerazione; è stata confrontata anche la distribuzione spaziale di
vorticità ed elicità per analizzare e quantificare la presenza di flussi secondari.
È stato fatto anche un confronto tra alcuni indici di interesse clinico: l’indice WSS (wall
shear stress) è spesso oggetto di studi in emodinamica, in quanto distribuzioni specifiche
di questa quantità sono correlate a stati patologici. Ad esempio, valori bassi e oscillanti
di WSS sono causa di formazione di placche aterosclerotiche [7, 53]. Valori alti di WSS,
se in presenza di valvole aortiche bicuspidi, aumentano la probabilità di formazione di
aneurisma rispetto ai casi con valvole tricuspidi [1]. Si veda Capitolo 2 per
approfondimenti. L’indice WSS è definito nel seguente modo:
WSS(𝐱, t) = μ√∑((∇𝐮(𝐱, t)𝐧) ∙ 𝛕(j))2
2
j=1
su Σt,
dove 𝐮 è la velocità del fluido, n il versore normale uscente, 𝛕(j) i versori tangenziali alla
parete e Σt il contorno del lume del vaso. Anche il TAWSS (media temporale del modulo
del WSS) è stato oggetto di confronto:
TAWSS(𝐱) = 1
T∫|WSS(𝐱, t)|dt .
T
0

44
Per il post-processing è stato utilizzato il software Paraview (versione 4.3) [29],
programma di visualizzazione open-source che offre la possibilità di analisi qualitative e
quantitative dei dati attraverso un ampio elenco di features già presenti; ulteriore opzione
è quella di modificare i “filtri”, potendo così generare indici personali. Di fatti, per poter
visualizzare il WSS è stato utilizzato un filtro precedentemente progettato in un’altra tesi
di laurea [12].
4.3 Cilindro
In questa sezione verranno esposti i risultati ottenuti dalle simulazioni fluidodinamiche in
una geometria cilindrica. Sono state svolte prove numeriche, con elementi P1bolla-P1, per
valutare l’effetto che l’aggiunta del contributo di velocità rotatoria ha sugli indici
fluidodinamici su una geometria semplice. È stata fatta una simulazione senza aggiungere
il termine rotatorio (β = 0), in cui il numero di Reynolds alla sistole è pari a 4820, per poi
confrontarla con la simulazione con il contributo di velocità non-assiale con il parametro
β fisiologico (β = 0.10) (si veda Sezione 4.1.2 per l’approfondimento). Per completezza,
sono stati presi in considerazione altri valori di β, nello specifico β = 0.05 e β = 0.15.
Per semplicità verrà assunta la seguente notazione nel proseguo di questa sezione:
CYL_0: prova relativa al cilindro, senza l’aggiunta del contributo rotatorio;
CYL_5: prova relativa al cilindro, con l’aggiunta del contributo rotatorio, nello
specifico assumendo β = 0.05;
CYL_10: prova relativa al cilindro, con l’aggiunta del contributo rotatorio, nello
specifico assumendo β = 0.10 (caso fisiologico);
CYL_15: prova relativa al cilindro, con l’aggiunta del contributo rotatorio, nello
specifico assumendo β = 0.15;

45
4.3.1 Velocità
Nella Figura 4.7 sono raffigurate le sezioni di inlet del cilindro, in cui è stato riportato il
campo di velocità imposto alla sistole e colorato secondo la velocità tangenziale in
direzione x: si noti come nell’immagine di sinistra la velocità imposta risulta solo assiale,
viceversa nell’immagine a destra è evidente come oltre ad un contributo assiale di
velocità, è stato aggiunto un termine di velocità rotatoria. Si ricordi che l’asse
longitudinale del cilindro è lungo z.
Figura 4.7: Confronto del campo di velocità alla sistole: da sinistra a destra i casi (a)
CYL_0 e (b) CYL_10
La Figura 4.8 mostra invece le streamlines di velocità alla sistole (colorate secondo il
modulo della velocità) dei quattro casi precedentemente esposti.
Figura 4.8: Confronto delle streamlines di velocità alla sistole: da sinistra a destra i casi
(a) CYL_0, (b) CYL_5, (c) CYL_10 e (d) CYL_15
46
Risulta evidente dalle immagini nella figura sopra l’effetto dell’introduzione della
velocità rotatoria alla sezione di ingresso del cilindro. Tale effetto elicoidale risulta
massimo all’istante sistolico poiché è l’istante temporale in cui la velocità rotatoria
raggiunge il suo picco massimo. La velocità assiale ed il termine di swirl, contribuiscono
a creare un moto elicoidale all’interno del cilindro. Tale evidenza risulta ancora più
visibile variando il parametro β fino a raggiungere valori pari a 1.5 volte quello
fisiologico.
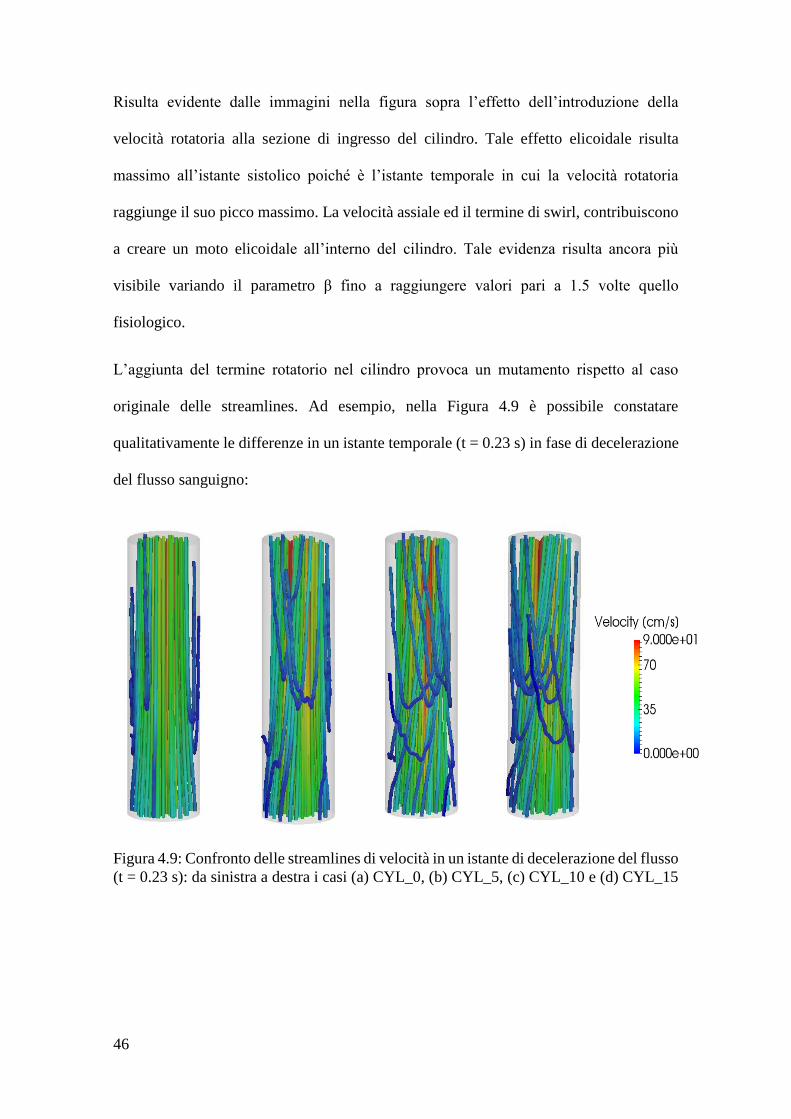
L’aggiunta del termine rotatorio nel cilindro provoca un mutamento rispetto al caso
originale delle streamlines. Ad esempio, nella Figura 4.9 è possibile constatare
qualitativamente le differenze in un istante temporale (t = 0.23 s) in fase di decelerazione
del flusso sanguigno:
Figura 4.9: Confronto delle streamlines di velocità in un istante di decelerazione del flusso
(t = 0.23 s): da sinistra a destra i casi (a) CYL_0, (b) CYL_5, (c) CYL_10 e (d) CYL_15
47
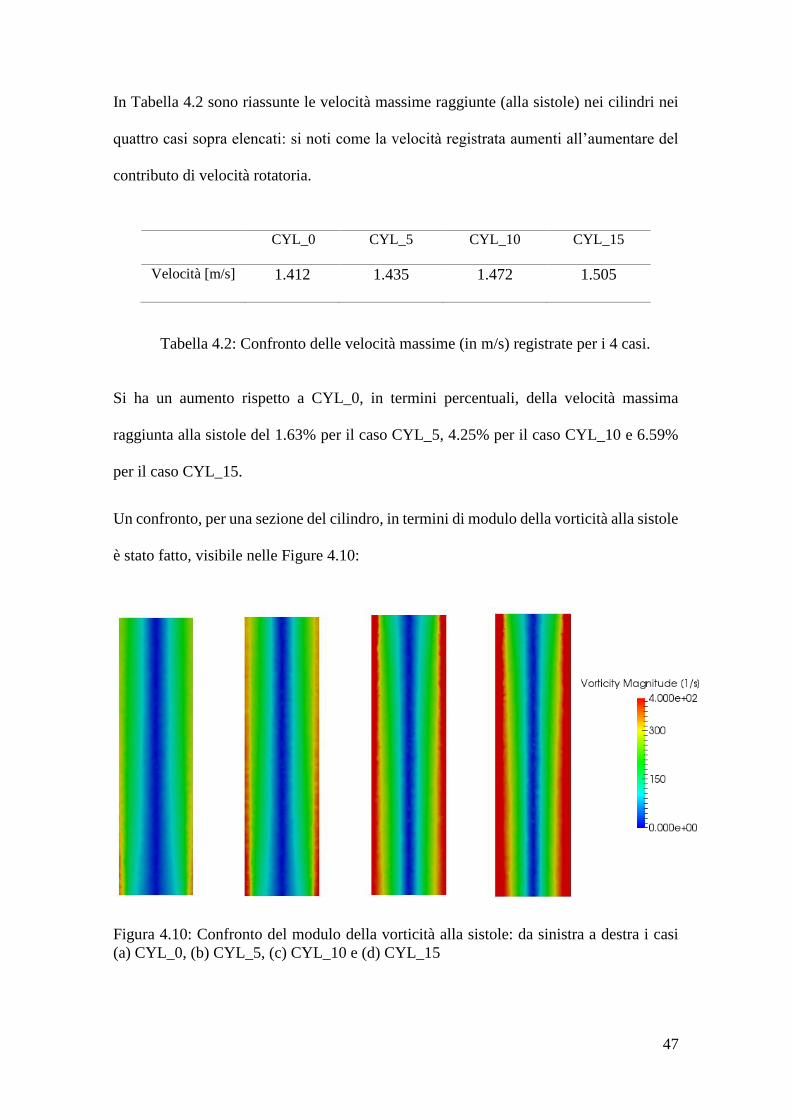
In Tabella 4.2 sono riassunte le velocità massime raggiunte (alla sistole) nei cilindri nei
quattro casi sopra elencati: si noti come la velocità registrata aumenti all’aumentare del
contributo di velocità rotatoria.
CYL_0 CYL_5 CYL_10 CYL_15
Velocità [m/s] 1.412 1.435 1.472 1.505
Tabella 4.2: Confronto delle velocità massime (in m/s) registrate per i 4 casi.
Si ha un aumento rispetto a CYL_0, in termini percentuali, della velocità massima
raggiunta alla sistole del 1.63% per il caso CYL_5, 4.25% per il caso CYL_10 e 6.59%
per il caso CYL_15.
Un confronto, per una sezione del cilindro, in termini di modulo della vorticità alla sistole
è stato fatto, visibile nelle Figure 4.10:
Figura 4.10: Confronto del modulo della vorticità alla sistole: da sinistra a destra i casi
(a) CYL_0, (b) CYL_5, (c) CYL_10 e (d) CYL_15

48
Il modulo della vorticità alla sistole risulta maggiore per il caso CYL_15: questo risultato
era atteso poiché in tale prova si è aggiunto il contributo di velocità rotatoria più alto,
provocando così un aumento di tale indice.
È stato inoltre fatto un confronto sintetico in termini di modulo di vorticità: si è andati a
calcolare il valore di vorticità media in spazio e media in tempo (Vormeanmean) ed il valore di
vorticità massima in spazio e media in tempo (Vormeanmax ).
La vorticità Λ è definita nel seguente modo:
Λ = ∇ x 𝐮,
dove 𝐮 è la velocità del fluido.
Da qui si è definita la vorticità media in spazio e media in tempo Vormeanmean:
Vormeanmean =
1
T∫ (∫(∇ x 𝐮)dΩ
Ω
)dtT
0
,
e la vorticità massima in spazio e media in tempo Vormeanmax :
Vormeanmax =
1
T∫ (max
Ω(∇ x 𝐮))dt
T
0
In Tabella 4.3 i valori ottenuti:
CYL_0 CYL_5 CYL_10 CYL_15
Vormeanmean [1/s] 245.3 253.2 258.6 263.6
Vormeanmax [1/s] 322.1 328.6 336.6 342.0
Tabella 4.3: Confronto dei valori (in 1/s) di Vormeanmean e Vormean
max

49
Si ha un aumento rispetto a CYL_0, in termini percentuali, della Vormeanmean del 3.22% per
il caso CYL_5, 5.42% per il caso CYL_10 e 7.46% per il caso CYL_15. Si ha un aumento
rispetto a CYL_0, in termini percentuali, della Vormeanmax del 2.02% per il caso CYL_5,
4.50% per il caso CYL_10 e 6.18% per il caso CYL_15.
Come era prevedibile, il modulo della vorticità aumenta all’aumentare del valore del
coefficiente β, poiché si introduce all’inlet un contributo di velocità rotatoria sempre più
grande. Probabilmente, la geometria semplice del cilindro, senza curvature o bruschi
cambiamenti nella forma, evidenzia maggiormente questo effetto: il moto elicoidale, a
differenza del caso in aorta, è dovuto esclusivamente al termine aggiuntivo introdotto
all’inlet; per tale motivo è stato scelto il cilindro come geometria iniziale per poter
valutare unicamente il contributo rotatorio imposto dall’utente, paragonabile allo swirl in
aorta dovuto alla meccanica ventricolare.
4.3.2 WSS
È stata fatta un’analisi del WSS per la geometria del cilindro. Nella Figure 4.11 è possibile
vedere un confronto della distribuzione spaziale del modulo del WSS all’istante di picco
sistolico per i 4 casi considerati: come per il confronto sulle velocità, anche il WSS risente
dell’aggiunta del contributo di velocità rotatoria all’inlet. Si può constatare visivamente
che all’aumentare del parametro β, gli sforzi di taglio alla parete risultano maggiori.
È stato inoltre fatto un confronto sintetico in termini di modulo di WSS: si è andati a
calcolare il valore di WSS medio in spazio e medio in tempo (WSSmeanmean) ed il valore di
WSS massimo in spazio e medio in tempo (WSSmeanmax ).
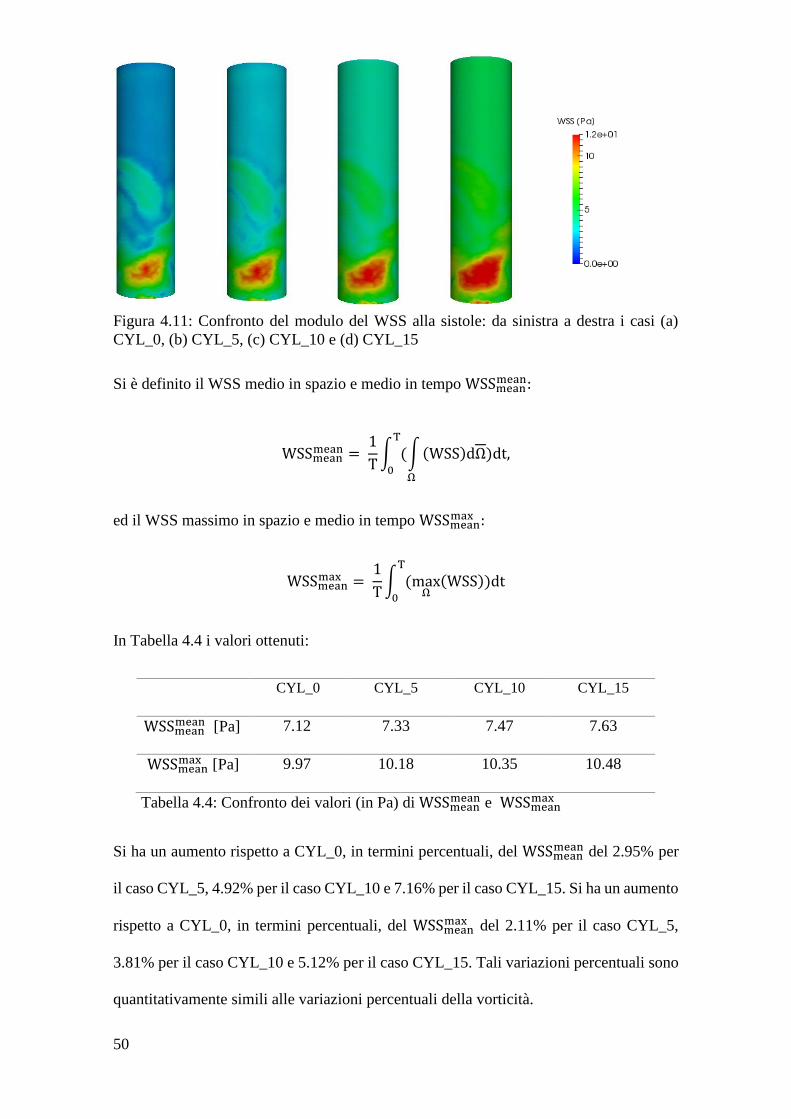
50
Figura 4.11: Confronto del modulo del WSS alla sistole: da sinistra a destra i casi (a)
CYL_0, (b) CYL_5, (c) CYL_10 e (d) CYL_15
Si è definito il WSS medio in spazio e medio in tempo WSSmeanmean:
WSSmeanmean =
1
T∫ (∫(WSS)dΩ
Ω
)dtT
0
,
ed il WSS massimo in spazio e medio in tempo WSSmeanmax :
WSSmeanmax =
1
T∫ (max
Ω(WSS))dt
T
0
In Tabella 4.4 i valori ottenuti:
CYL_0 CYL_5 CYL_10 CYL_15
WSSmeanmean [Pa] 7.12 7.33 7.47 7.63
WSSmeanmax [Pa] 9.97 10.18 10.35 10.48
Tabella 4.4: Confronto dei valori (in Pa) di WSSmeanmean e WSSmean
max
Si ha un aumento rispetto a CYL_0, in termini percentuali, del WSSmeanmean del 2.95% per
il caso CYL_5, 4.92% per il caso CYL_10 e 7.16% per il caso CYL_15. Si ha un aumento
rispetto a CYL_0, in termini percentuali, del WSSmeanmax del 2.11% per il caso CYL_5,
3.81% per il caso CYL_10 e 5.12% per il caso CYL_15. Tali variazioni percentuali sono
quantitativamente simili alle variazioni percentuali della vorticità.

51
Come ultima analisi, sono state mostrate in Figura 4.12 il TAWSS per i 4 casi in esame:
Figura 4.12: Confronto del modulo del TAWSS: da sinistra a destra i casi (a) CYL_0, (b)
CYL_5, (c) CYL_10 e (d) CYL_15
L’analisi del TAWSS mostra, come atteso, che la media temporale del WSS risulta
crescente all’aumentare di β: di fatti, già dai valori medi in tempo del WSS, tale
andamento era prevedibile. Si può affermare quindi, che nel caso di un cilindro, l’aggiunta
del termine rotatorio provoca l’aumento della vorticità e del WSS, sia come valori
massimi che come valori medi nel tempo.
4.4 Aorta con valvola aortica tricuspide
In questa sezione verranno esposti i risultati ottenuti dalle simulazioni fluidodinamiche
per l’Aorta_TAV. Sono state svolte prove numeriche sulle aorte, con elementi finiti
P1bolla-P1, per valutare l’effetto che l’aggiunta del contributo di velocità rotatoria ha sugli
indici fluidodinamici su una geometria reale di aorta. È stata fatta una simulazione senza
aggiungere il termine rotatorio (β = 0), in cui il numero di Reynolds alla sistole è pari a
3856, per poi confrontarla con la simulazione con il contributo di velocità non-assiale con
il parametro β fisiologico (β = 0.10) (si veda Sezione 4.1.2 per l’approfondimento). Per
semplicità verrà assunta la seguente notazione nel proseguo di questa sezione:

52
Aorta_TAV_0: prova relativa all’aorta con valvola aortica tricuspide, senza
l’aggiunta del contributo rotatorio;
Aorta_TAV_10: prova relativa all’aorta con valvola aortica tricuspide, con
l’aggiunta del contributo rotatorio, nello specifico assumendo β = 0.10 (caso
fisiologico).
4.4.1 Velocità
Nella Figura 4.13 sono raffigurate le sezioni di inlet dell’Aorta_TAV, in cui è stato
riportato il campo di velocità imposto alla sistole e colorato secondo la velocità
tangenziale in direzione x: si noti come nell’immagine a sinistra la velocità imposta risulta
solo assiale, viceversa nell’immagine a destra è evidente come oltre ad un contributo
assiale di velocità, è stato aggiunto un termine di velocità rotatoria. Si ricordi che la
sezione di inlet è perpendicolare all’asse z.
Figura 4.13: Confronto del campo di velocità alla sistole: a sinistra Aorta_TAV_0, a
destra Aorta_TAV_10
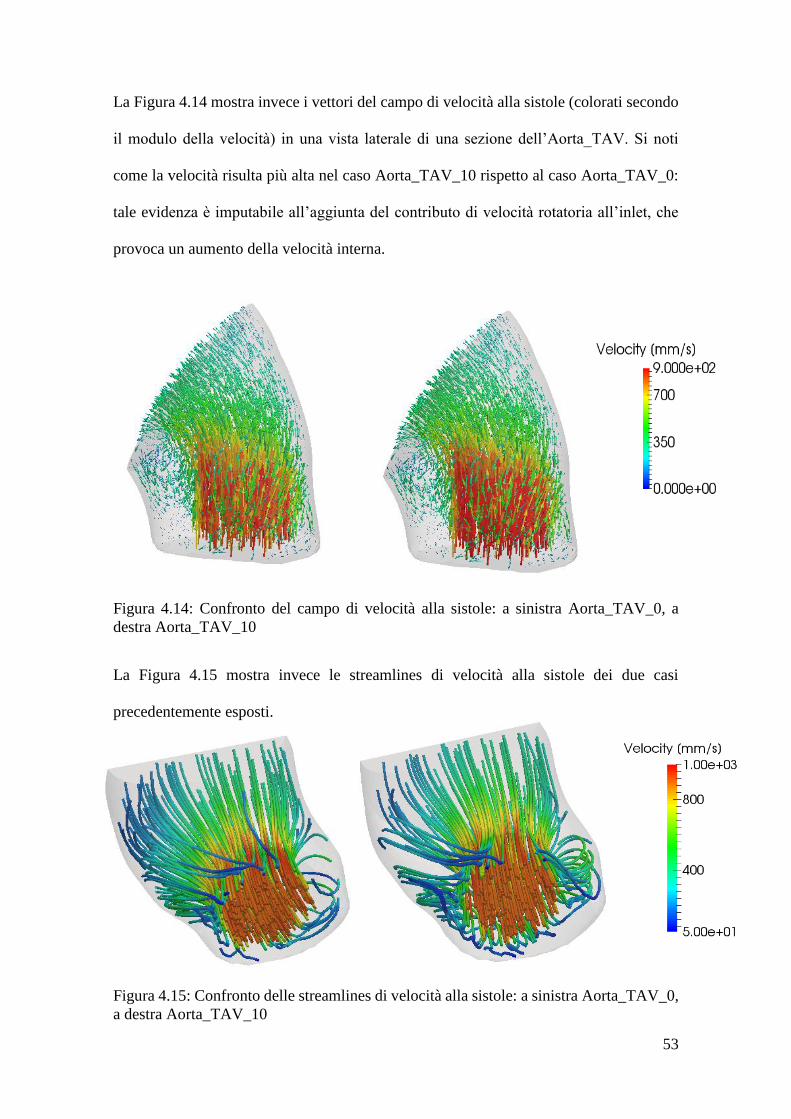
53
La Figura 4.14 mostra invece i vettori del campo di velocità alla sistole (colorati secondo
il modulo della velocità) in una vista laterale di una sezione dell’Aorta_TAV. Si noti
come la velocità risulta più alta nel caso Aorta_TAV_10 rispetto al caso Aorta_TAV_0:
tale evidenza è imputabile all’aggiunta del contributo di velocità rotatoria all’inlet, che
provoca un aumento della velocità interna.
Figura 4.14: Confronto del campo di velocità alla sistole: a sinistra Aorta_TAV_0, a
destra Aorta_TAV_10
La Figura 4.15 mostra invece le streamlines di velocità alla sistole dei due casi
precedentemente esposti.
Figura 4.15: Confronto delle streamlines di velocità alla sistole: a sinistra Aorta_TAV_0,
a destra Aorta_TAV_10
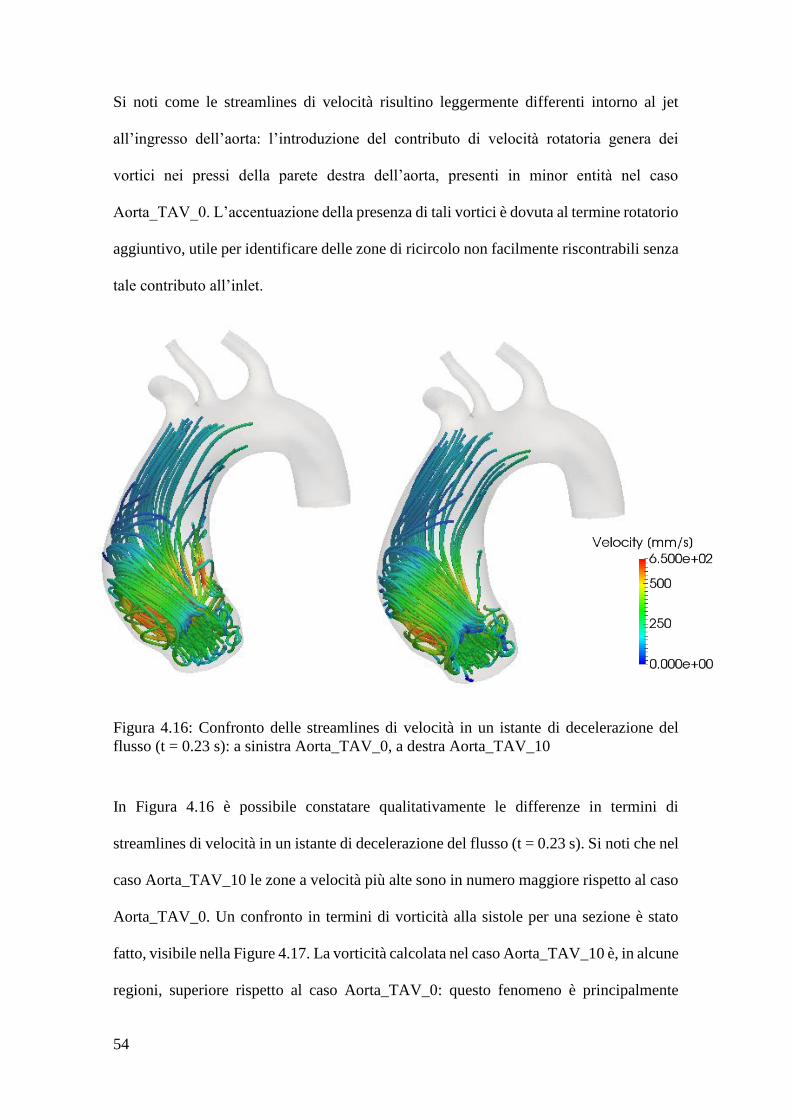
54
Si noti come le streamlines di velocità risultino leggermente differenti intorno al jet
all’ingresso dell’aorta: l’introduzione del contributo di velocità rotatoria genera dei
vortici nei pressi della parete destra dell’aorta, presenti in minor entità nel caso
Aorta_TAV_0. L’accentuazione della presenza di tali vortici è dovuta al termine rotatorio
aggiuntivo, utile per identificare delle zone di ricircolo non facilmente riscontrabili senza
tale contributo all’inlet.
Figura 4.16: Confronto delle streamlines di velocità in un istante di decelerazione del
flusso (t = 0.23 s): a sinistra Aorta_TAV_0, a destra Aorta_TAV_10
In Figura 4.16 è possibile constatare qualitativamente le differenze in termini di
streamlines di velocità in un istante di decelerazione del flusso (t = 0.23 s). Si noti che nel
caso Aorta_TAV_10 le zone a velocità più alte sono in numero maggiore rispetto al caso
Aorta_TAV_0. Un confronto in termini di vorticità alla sistole per una sezione è stato
fatto, visibile nella Figure 4.17. La vorticità calcolata nel caso Aorta_TAV_10 è, in alcune
regioni, superiore rispetto al caso Aorta_TAV_0: questo fenomeno è principalmente

55
visibile nella parte prossimale dell’arco aortico. L’aggiunta del contributo rotatorio
determina una maggiore vorticità nel flusso in aorta, provocando quindi un aumento di
tale quantità, specialmente nelle regioni del dominio in cui è maggiormente significativo
il contributo aggiuntivo, ovvero all’inlet.
Figura 4.17: Confronto del modulo della vorticità alla sistole: a sinistra Aorta_TAV_0, a
destra Aorta_TAV_10
È stato inoltre fatto un confronto sintetico in termini di modulo di vorticità: si è andati a
calcolare il valore di vorticità media in spazio e media in tempo (Vormeanmean) ed il valore di
vorticità massima in spazio e media in tempo (Vormeanmax ). Tali quantità sono state definite
nella Sezione 4.3. In Tabella 4.5 i valori ottenuti:
Aorta_TAV_0 Aorta_TAV_10
Vormeanmean [1/s] 972.4 986.2
Vormeanmax [1/s] 1297.1 1312.2
Tabella 4.5: Confronto dei valori (in 1/s) di Vormeanmean e Vormean
max

56
Si ha un aumento rispetto a Aorta_TAV_0, in termini percentuali, della Vormeanmean del
1.42% per il caso Aorta_TAV_10. Si ha un aumento rispetto a Aorta_TAV_0, in termini
percentuali, della Vormeanmax del 1.16% per il caso Aorta_TAV_10.
Le differenze registrate in termini percentuali, rispetto al caso del cilindro, risultano
inferiori: tale risultato potrebbe essere dovuto alla complessa geometria dell’aorta, la
quale, fisiologicamente presenta moto elicoidale nell’arco aortico. Inoltre, le geometrie
delle aorte utilizzate presentano una dilatazione dell’arco aortico che, di per sé, altera la
fluidodinamica del sangue, generando flussi secondari [6].
Si è andati quindi a fare un confronto più approfondito su queste quantità, soffermandosi
sull’istante temporale della sistole (t = 0.13 s).
È stata definita la vorticità media in spazio alla sistole Vorsistolemean e la vorticità massima in
spazio alla sistole Vorsistolemax :
Vorsistolemean = ∫(∇ x 𝐮(t̃))dΩ
Ω
,
Vorsistolemax = max
Ω(∇ x 𝐮(t̃)),
dove t̃ é l’istante temporale della sistole. In Tabella 4.6 i valori ottenuti:
Aorta_TAV_0 Aorta_TAV_10
Vorsistolemean [1/s] 1345.5 1424.7
Vorsistolemax [1/s] 2125.4 2231.1
Tabella 4.6: Confronto dei valori (in 1/s) di Vorsistolemean e Vorsistole
max
57
Si ha un aumento rispetto a Aorta_TAV_0, in termini percentuali, della Vorsistolemean del
5.89% per il caso Aorta_TAV_10. Si ha un aumento rispetto a Aorta_TAV_0, in termini
percentuali, della Vorsistolemax del 4.97% per il caso Aorta_TAV_10.
In questo istante temporale le differenze risultano leggermente maggiori poiché è il
momento in cui si impongono le maggiori differenze in termini di velocità all’inlet: di
fatti, il contributo di velocità rotatoria a t = 0.13 s raggiunge il suo picco massimo. Per
tale motivo, anche l’indice di vorticità alla sistole sopra definito risente di questa
differenza, sia in termini medi che massimi.
È stato inoltre calcolata la quantità Localized Normalized Helicity (LNH), definita in un
lavoro [39] nel seguente modo:
LNH(𝐱, t) = 𝐮(𝐱, t) ∙ 𝚲(𝐱, t)
|𝐮(𝐱, t)||𝚲(𝐱, t)| ,
dove u è la velocità del fluido e 𝚲 la vorticità. Tale indice, per come è stato definito,
esprime la quantità di elicità in ogni punto del dominio e ad ogni istante di tempo. Sono
stati analizzati i campi di LNH all’istante temporale della sistole. Una sua evoluzione è
l’Helical Flow Index (HFI) [26], in cui si procede ad una media temporale del precedente
indice LNH. Non è stato preso in considerazione l’HFI poiché, per come è definito,
risentirebbe del moto elicoidale presente in aorta anche durante la fase diastolica, per cui
non sarebbe possibile distinguere l’effetto del contributo aggiuntivo di velocità rotatoria
imposta all’inlet.
In Figura 4.18 la distribuzione spaziale di LNH alla sistole: è possibile notare una
differenza tra i due casi, specialmente nella parte prossimale dell’aorta, dove il contributo
aggiuntivo di velocità rotatoria è massimo.

58
Figura 4.18: Confronto di LNH alla sistole: a sinistra Aorta_TAV_0, a destra
Aorta_TAV_10
È stata inoltre calcolata la media spaziale di LNH all’istante temporale della sistole
LNHsistolemean , definita nel seguente modo:
LNHsistolemean = ∫ LNH(t̃)dΩ
Ω
,
dove t̃ é l’istante temporale della sistole. In Tabella 4.7 i valori ottenuti:
Aorta_TAV_0 Aorta_TAV_10
LNHsistolemean [-] 0.632 0.675
Tabella 4.7: Confronto dei valori di LNHsistolemean
Si ha una differenza in termini percentuali pari a 6.80%, dovuta alla presenza del termine
aggiuntivo di velocità rotatoria.
In conclusione, l’aggiunta di tale contributo rotatorio è consigliato in studi in cui si vuole
investigare in maniera dettagliata la presenza di vorticità ed elicità, specialmente al picco
sistolico. Infatti, l’introduzione di velocità rotatoria, nel caso di aorta con valvola aortica
tricuspide, provoca delle differenze di vorticità alla sistole di circa il 5% e di elicità di
circa il 7%.

59
4.4.2 WSS
È stata fatta un’analisi del WSS per la geometria reale dell’aorta con valvola aortica
tricuspide. Nella Figura 4.19 è possibile vedere un confronto della distribuzione spaziale
del modulo del WSS all’istante di picco sistolico per i 2 casi considerati.
È possibile notare in Figura 4.19 come il WSS sistolico sia maggiore nel caso
Aorta_TAV_10, principalmente nella zona prossimale-mediale dell’arco aortico. Non si
registrano differenze importanti nella zona distale dell’aorta, probabilmente poiché il
contributo di velocità rotatoria ha maggiore effetto nella zona adiacente all’inlet.
Figura 4.19: Confronto del modulo del WSS alla sistole: a sinistra Aorta_TAV_0, a destra
Aorta_TAV_10
È stato inoltre fatto un confronto sintetico in termini di modulo di WSS: si è andati a
calcolare il valore di WSS medio in spazio e medio in tempo (WSSmeanmean) ed il valore di
WSS massimo in spazio e medio in tempo (WSSmeanmax ). Tali quantità sono state definite
nella Sezione 4.3.
60
In Tabella 4.8 i valori ottenuti:
Aorta_TAV_0 Aorta_TAV_10
WSSmeanmean [Pa] 0.954 0.964
WSSmeanmax [Pa] 1.987 2.004
Tabella 4.8: Confronto dei valori (in Pa) di WSSmeanmean e WSSmean
max
Si ha un aumento rispetto a Aorta_TAV_0, in termini percentuali, del WSSmeanmean del
1.05% per il caso Aorta_TAV_10. Si ha un aumento rispetto a Aorta_TAV_0, in termini
percentuali, del WSSmeanmax del 0.86% per il caso Aorta_TAV_10.
Come per la vorticità, le differenze registrate in termini percentuali, rispetto al caso del
cilindro, risultano inferiori probabilmente per i motivi sopra elencati. Si è andati quindi a
fare un confronto più approfondito su queste quantità, soffermandosi sull’istante
temporale della sistole (t = 0.13 s).
È stato definito il WSS medio in spazio alla sistole WSSsistolemean e il WSS massimo in spazio
alla sistole WSSsistolemax :
WSSsistolemean = ∫ WSS(t̃) dΩ
Ω
,
WSSsistolemax = max
Ω(WSS(t̃)),
dove t̃ é l’istante temporale della sistole.

61
In Tabella 4.9 i valori ottenuti:
Aorta_TAV_0 Aorta_TAV_10
WSSsistolemean [Pa] 1.02 1.07
WSSsistolemax [Pa] 2.75 2.78
Tabella 4.9: Confronto dei valori (in Pa) di WSSsistolemean e WSSsistole
max
Si ha un aumento rispetto a Aorta_TAV_0, in termini percentuali, della WSSsistolemean del
4.90% per il caso Aorta_TAV_10. Si ha un aumento rispetto a Aorta_TAV_0, in termini
percentuali, della WSSsistolemax del 1.09% per il caso Aorta_TAV_10.
Le differenze percentuali alla sistole risultano leggermente maggiori rispetto alle
variazioni medie nel tempo, in particolare per il valore di WSS medio in spazio. Per il
valore di WSS massimo in spazio non si registrano differenze percentuali importanti,
probabilmente poiché il WSS massimo si registra in zona distale dove l’effetto del
contributo rotatorio all’inlet potrebbe essere stato oscurato dai flussi elicoidali,
fisiologicamente presenti, dovuti alla curvatura dell’arco aortico.
Come ultima analisi, sono state mostrate in Figura 4.20 il TAWSS per i 2 casi in esame:
Figura 4.20: Confronto del modulo del TAWSS: a sinistra Aorta_TAV_0, a destra
Aorta_TAV_10
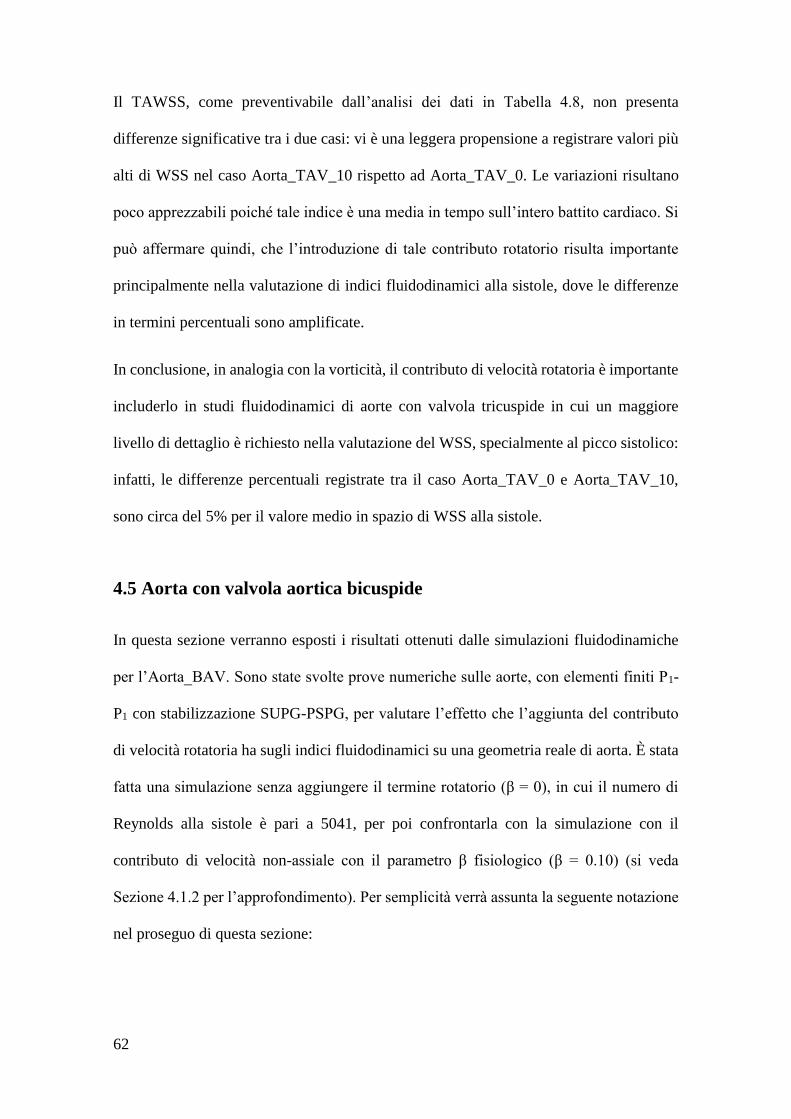
62
Il TAWSS, come preventivabile dall’analisi dei dati in Tabella 4.8, non presenta
differenze significative tra i due casi: vi è una leggera propensione a registrare valori più
alti di WSS nel caso Aorta_TAV_10 rispetto ad Aorta_TAV_0. Le variazioni risultano
poco apprezzabili poiché tale indice è una media in tempo sull’intero battito cardiaco. Si
può affermare quindi, che l’introduzione di tale contributo rotatorio risulta importante
principalmente nella valutazione di indici fluidodinamici alla sistole, dove le differenze
in termini percentuali sono amplificate.
In conclusione, in analogia con la vorticità, il contributo di velocità rotatoria è importante
includerlo in studi fluidodinamici di aorte con valvola tricuspide in cui un maggiore
livello di dettaglio è richiesto nella valutazione del WSS, specialmente al picco sistolico:
infatti, le differenze percentuali registrate tra il caso Aorta_TAV_0 e Aorta_TAV_10,
sono circa del 5% per il valore medio in spazio di WSS alla sistole.
4.5 Aorta con valvola aortica bicuspide
In questa sezione verranno esposti i risultati ottenuti dalle simulazioni fluidodinamiche
per l’Aorta_BAV. Sono state svolte prove numeriche sulle aorte, con elementi finiti P1-
P1 con stabilizzazione SUPG-PSPG, per valutare l’effetto che l’aggiunta del contributo
di velocità rotatoria ha sugli indici fluidodinamici su una geometria reale di aorta. È stata
fatta una simulazione senza aggiungere il termine rotatorio (β = 0), in cui il numero di
Reynolds alla sistole è pari a 5041, per poi confrontarla con la simulazione con il
contributo di velocità non-assiale con il parametro β fisiologico (β = 0.10) (si veda
Sezione 4.1.2 per l’approfondimento). Per semplicità verrà assunta la seguente notazione
nel proseguo di questa sezione:

63
Aorta_BAV_0: prova relativa all’aorta con valvola aortica bicuspide, senza
l’aggiunta del contributo rotatorio;
Aorta_BAV_10: prova relativa all’aorta con valvola aortica bicuspide, con
l’aggiunta del contributo rotatorio, nello specifico assumendo β = 0.10 (caso
fisiologico).
4.5.1 Velocità
Nella Figura 4.21 sono raffigurate le sezioni di inlet dell’Aorta_BAV, in cui è stato
riportato il campo di velocità imposto alla sistole e colorato secondo la velocità
tangenziale in direzione x: si noti come nell’immagine a sinistra la velocità imposta risulta
solo assiale, viceversa nell’immagine a destra è evidente come oltre ad un contributo
assiale di velocità, è stato aggiunto un termine di velocità rotatoria. Si ricordi che la
sezione di inlet è perpendicolare all’asse z.
Figura 4.21: Confronto del campo di velocità alla sistole: a sinistra Aorta_BAV_0, a
destra Aorta_BAV_10
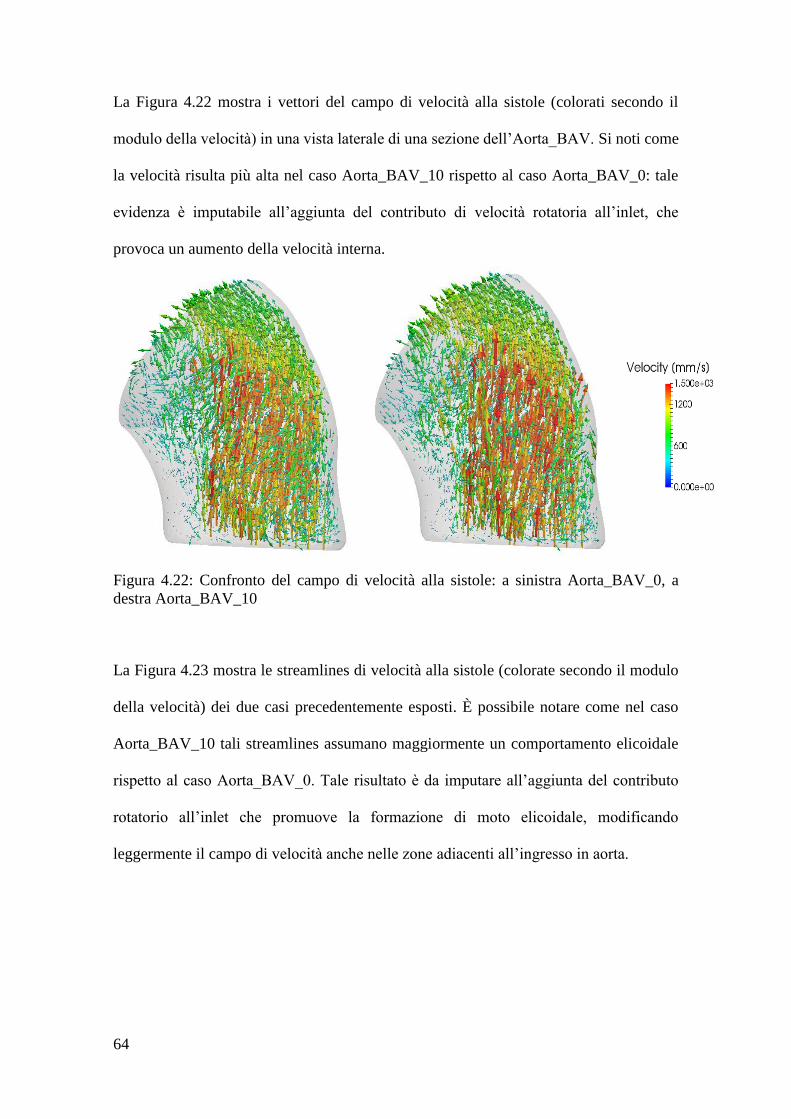
64
La Figura 4.22 mostra i vettori del campo di velocità alla sistole (colorati secondo il
modulo della velocità) in una vista laterale di una sezione dell’Aorta_BAV. Si noti come
la velocità risulta più alta nel caso Aorta_BAV_10 rispetto al caso Aorta_BAV_0: tale
evidenza è imputabile all’aggiunta del contributo di velocità rotatoria all’inlet, che
provoca un aumento della velocità interna.
Figura 4.22: Confronto del campo di velocità alla sistole: a sinistra Aorta_BAV_0, a
destra Aorta_BAV_10
La Figura 4.23 mostra le streamlines di velocità alla sistole (colorate secondo il modulo
della velocità) dei due casi precedentemente esposti. È possibile notare come nel caso
Aorta_BAV_10 tali streamlines assumano maggiormente un comportamento elicoidale
rispetto al caso Aorta_BAV_0. Tale risultato è da imputare all’aggiunta del contributo
rotatorio all’inlet che promuove la formazione di moto elicoidale, modificando
leggermente il campo di velocità anche nelle zone adiacenti all’ingresso in aorta.
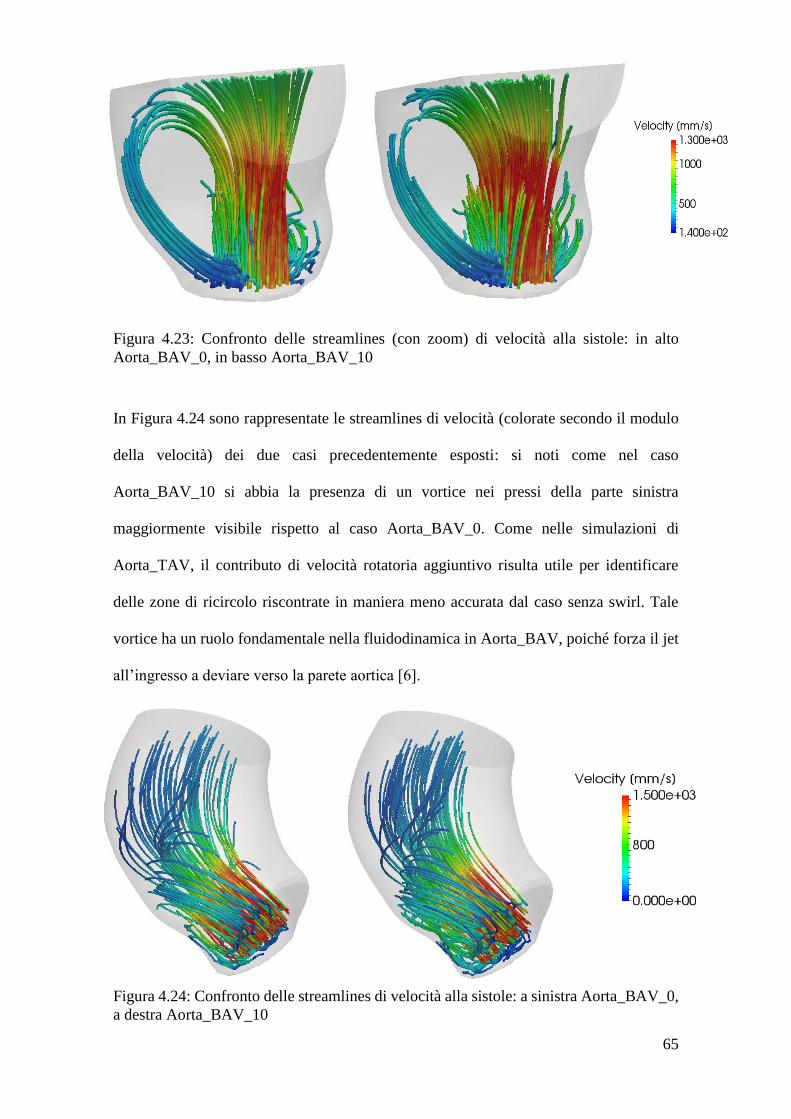
65
Figura 4.23: Confronto delle streamlines (con zoom) di velocità alla sistole: in alto
Aorta_BAV_0, in basso Aorta_BAV_10
In Figura 4.24 sono rappresentate le streamlines di velocità (colorate secondo il modulo
della velocità) dei due casi precedentemente esposti: si noti come nel caso
Aorta_BAV_10 si abbia la presenza di un vortice nei pressi della parte sinistra
maggiormente visibile rispetto al caso Aorta_BAV_0. Come nelle simulazioni di
Aorta_TAV, il contributo di velocità rotatoria aggiuntivo risulta utile per identificare
delle zone di ricircolo riscontrate in maniera meno accurata dal caso senza swirl. Tale
vortice ha un ruolo fondamentale nella fluidodinamica in Aorta_BAV, poiché forza il jet
all’ingresso a deviare verso la parete aortica [6].
Figura 4.24: Confronto delle streamlines di velocità alla sistole: a sinistra Aorta_BAV_0,
a destra Aorta_BAV_10
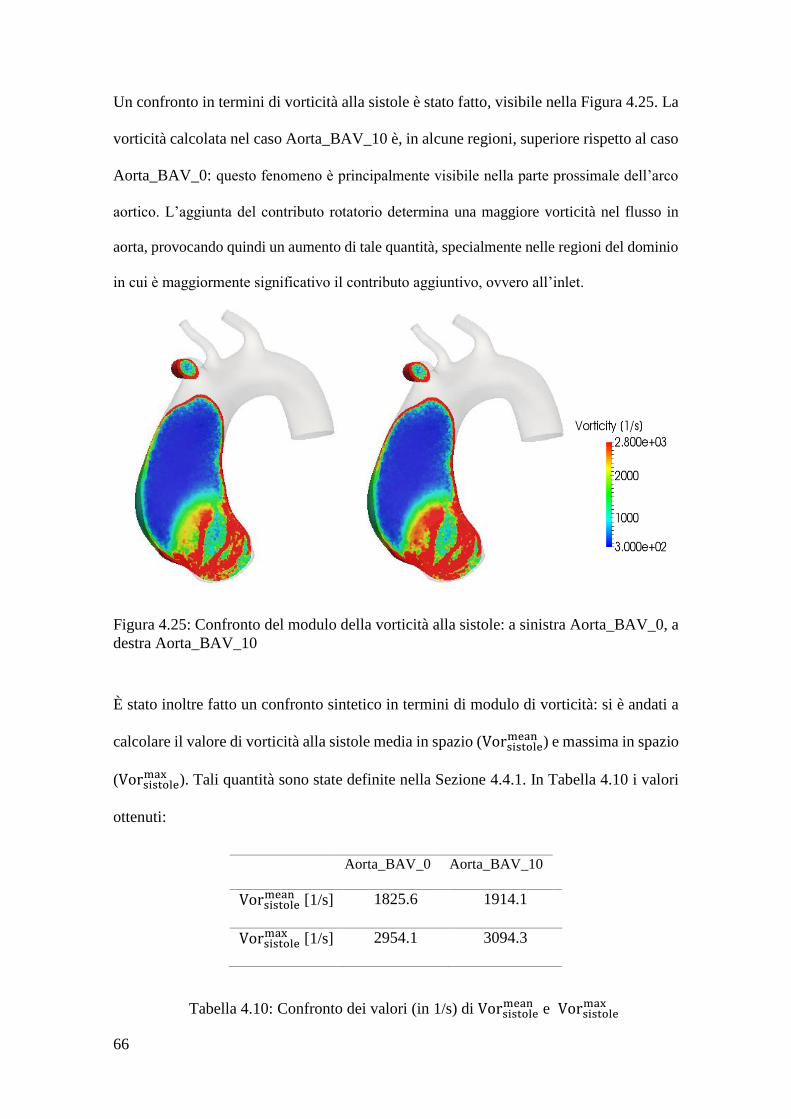
66
Un confronto in termini di vorticità alla sistole è stato fatto, visibile nella Figura 4.25. La
vorticità calcolata nel caso Aorta_BAV_10 è, in alcune regioni, superiore rispetto al caso
Aorta_BAV_0: questo fenomeno è principalmente visibile nella parte prossimale dell’arco
aortico. L’aggiunta del contributo rotatorio determina una maggiore vorticità nel flusso in
aorta, provocando quindi un aumento di tale quantità, specialmente nelle regioni del dominio
in cui è maggiormente significativo il contributo aggiuntivo, ovvero all’inlet.
Figura 4.25: Confronto del modulo della vorticità alla sistole: a sinistra Aorta_BAV_0, a
destra Aorta_BAV_10
È stato inoltre fatto un confronto sintetico in termini di modulo di vorticità: si è andati a
calcolare il valore di vorticità alla sistole media in spazio (Vorsistolemean ) e massima in spazio
(Vorsistolemax ). Tali quantità sono state definite nella Sezione 4.4.1. In Tabella 4.10 i valori
ottenuti:
Aorta_BAV_0 Aorta_BAV_10
Vorsistolemean [1/s] 1825.6 1914.1
Vorsistolemax [1/s] 2954.1 3094.3
Tabella 4.10: Confronto dei valori (in 1/s) di Vorsistolemean e Vorsistole
max

67
Si ha un aumento rispetto a Aorta_BAV_0, in termini percentuali, della Vorsistolemean del
3.26% per il caso Aorta_BAV_10. Si ha un aumento rispetto a Aorta_BAV_0, in termini
percentuali, della Vorsistolemax del 4.75% per il caso Aorta_BAV_10. È stato fatto il
confronto in questo istante temporale poiché è il momento in cui si impongono le
maggiori differenze in termini di velocità all’inlet: di fatti, il contributo di velocità
rotatoria a t = 0.13 s raggiunge il suo picco massimo. Per tale motivo, l’indice di vorticità
alla sistole sopra definito risente di questa differenza, sia in termini medi che massimi.
Rispetto al caso Aorta_TAV, le differenze riscontrate aggiungendo la velocità rotatoria
all’inlet, risultano leggermente maggiori, attestandosi intorno al 5% per la vorticità.
Anche per il caso Aorta_BAV è stato calcolato l’indice LNH presentato in Sezione 4.4.1:
in Figura 4.26 è rappresentato il campo di LNH all’istante temporale alla sistole; in
Tabella 4.11 i valori della media in spazio alla sistole di tale indice.
Figura 4.26: Confronto di LNH alla sistole: a sinistra Aorta_BAV_0, a destra
Aorta_BAV_10
Come nel caso Aorta_TAV, anche per l’Aorta_BAV vi è un aumento di elicità nella parte
prossimale dell’arco aortico. Tale risultato è giustificabile con l’introduzione del
contributo di velocità rotatoria all’inlet, promuovendo così la formazione di moto
elicoidale.
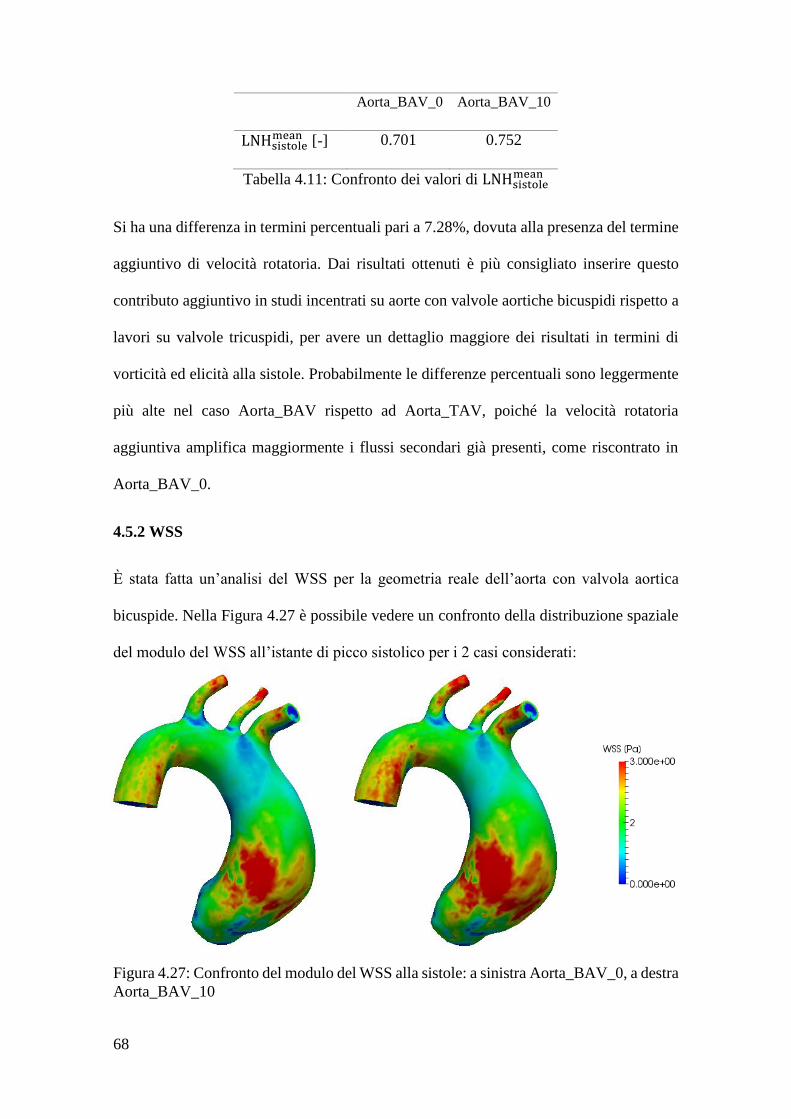
68
Aorta_BAV_0 Aorta_BAV_10
LNHsistolemean [-] 0.701 0.752
Tabella 4.11: Confronto dei valori di LNHsistolemean
Si ha una differenza in termini percentuali pari a 7.28%, dovuta alla presenza del termine
aggiuntivo di velocità rotatoria. Dai risultati ottenuti è più consigliato inserire questo
contributo aggiuntivo in studi incentrati su aorte con valvole aortiche bicuspidi rispetto a
lavori su valvole tricuspidi, per avere un dettaglio maggiore dei risultati in termini di
vorticità ed elicità alla sistole. Probabilmente le differenze percentuali sono leggermente
più alte nel caso Aorta_BAV rispetto ad Aorta_TAV, poiché la velocità rotatoria
aggiuntiva amplifica maggiormente i flussi secondari già presenti, come riscontrato in
Aorta_BAV_0.
4.5.2 WSS
È stata fatta un’analisi del WSS per la geometria reale dell’aorta con valvola aortica
bicuspide. Nella Figura 4.27 è possibile vedere un confronto della distribuzione spaziale
del modulo del WSS all’istante di picco sistolico per i 2 casi considerati:
Figura 4.27: Confronto del modulo del WSS alla sistole: a sinistra Aorta_BAV_0, a destra
Aorta_BAV_10

69
È possibile notare in Figura 4.27 come il WSS sistolico sia maggiore nel caso
Aorta_BAV_10, principalmente nella zona dove è presente la dilatazione della parete, di
per sé interessata da WSS alti. Non si registrano differenze importanti nella zona distale
dell’aorta, probabilmente poiché il contributo di velocità rotatoria ha maggiore effetto
nella zona adiacente all’inlet.
È stato inoltre fatto un confronto sintetico in termini di modulo del WSS: si è andati a
calcolare il valore di WSS alla sistole medio in spazio (WSSsistolemean ) e massimo in spazio
(WSSsistolemax ). Tali quantità sono state definite nella Sezione 4.4.2. Come per la vorticità,
questa analisi è stata fatta all’istante temporale del picco sistolico per le stesse ragioni di
cui sopra. In Tabella 4.12 i valori ottenuti.
Aorta_BAV_0 Aorta_BAV_10
WSSsistolemean [Pa] 1.90 2.01
WSSsistolemax [Pa] 3.52 3.67
Tabella 4.12: Confronto dei valori (in Pa) di WSSsistolemean e WSSsistole
max
Si ha un aumento rispetto a Aorta_BAV_0, in termini percentuali, del WSSsistolemean del
5.79% per il caso Aorta_BAV_10. Si ha un aumento rispetto a Aorta_BAV_0, in termini
percentuali, del WSSsistolemax del 4.26% per il caso Aorta_BAV_10.
Le differenze percentuali risultano maggiormente apprezzabili rispetto al caso
Aorta_TAV ed inoltre simili alle variazioni registrate per la vorticità.
Dopo aver analizzato il TAWSS per Aorta_TAV e non avendo riscontrato differenze
significative del WSS mediato in tempo, è stato scelto di non effettuare tale analisi per
Aorta_BAV, poiché è risultato evidente come l’effetto del contributo rotatorio venga
oscurato dai flussi elicoidali già presenti nell’arco aortico.
70
In conclusione ed in analogia con la vorticità, si può affermare, con l’evidenza dei risultati
esposti in questa sezione, che l’aggiunta del contributo della velocità rotatoria risulti più
apprezzabile rispetto al caso Aorta_TAV, se presa in considerazione in studi in cui si
voglia dettagliare maggiormente il WSS all’istante sistolico in geometrie reali di aorte
con valvole aortiche bicuspidi: di fatti, le differenze percentuali del WSS sono all’incirca
del 5% rispetto al caso di controllo senza aggiunta dello swirl.

71
Ringraziamenti
Questo lavoro è giunto al termine anche grazie al supporto di chi ha contribuito alla sua
realizzazione. Desidero ringraziare tutte le persone che direttamente o indirettamente mi
hanno aiutato.
Innanzitutto, ringrazio il Prof. Christian Vergara, con cui questo lavoro è stato
interamente svolto, per avermi dato tutta la fiducia, l’aiuto e la disponibilità necessaria
per completarlo.
Inoltre, ringrazio i docenti del corso di Ingegneria Biomedica che in cinque anni mi hanno
trasmesso insegnamenti ben oltre le semplici nozioni.
Grazie anche a tutti i miei amici, che pur a 1000 km di distanza mi sono sempre stati
vicini e mi hanno dimostrato il loro affetto.
Infine, i ringraziamenti più importanti per me. Ai miei genitori Elvira e Francesco, alle
mie sorelle Giulia e Chiara, e ai miei nonni, che hanno sempre creduto in me; mi hanno
sempre incoraggiato anche quando tutto sembrava perso.
Dulcis in fundo, grazie al mio amore, Laura. Senza di te non ce l’avrei mai fatta: sei stata
un supporto attivo per tutti questi anni e soprattutto in questa fase finale. Grazie per
avermi sostenuto, sempre e comunque. Grazie perché quando sono con te sono felice.

72
73
Bibliografia
[1] Barker A.J. et al., The role of hemodynamics in bicuspid aortic valve disease, Eur J
Cardiothorac Surg 39:805–6, 2011.
[2] Bauer M. et al., Different hemodynamic stress of the ascending aorta wall in patients
with bicuspid and tricuspid aortic valve, J Card Surg 21:218–20, 2006
[3] Bonomi D. et al., Influence of the aortic valve leaflets on the fluid-dynamics in aorta
in presence of a normally functioning bicuspid valve, Biomech Model Mechanobiol, DOI
10.1007/s10237-015-0679-8, 2015
[4] Corno A.F. et al., The non-circular shape of FloWatch-PAB prevents the need for
pulmonary artery reconstruction after banding. Computational fluid dynamics and clinical
correlations, Eur J Cardiothorac Surg. Jan;29(1):93-9, 2006
[5] Doost S.N. et al., Heart blood flow simulation: a perspective review, BioMedical
Engineering OnLine2016 15:101 doi: 10.1186/s12938-016-0224-8, 2016
[6] Faggiano E. et al., Helical flows and asymmetry of blood jet in dilated ascending aorta
with normally functioning bicuspid valve, Biomech Model Mechanobiol. Aug;12(4):801-
13. doi: 10.1007/s10237-012-0444-1, 2013
[7] Finn A.V. et al., Concept of Vulnerable/Unstable Plaque, Arteriosclerosis,
Thrombosis, and Vascular Biology, 30, pp. 1282-1292, 2010
[8] Frydrychowicz A. et al., Multidirectional flow analysis by cardiovascular magnetic
resonance in aneurysm development following repair of aortic coarctation, Journal of
Cardiovascular Magnetic Resonance 10:30 doi: 10.1186/1532-429X-10-30, 2008
[9] Girdauskas E. et al., Is aortopathy in bicuspid aortic valve disease a congenital defect
or a result of abnormal hemodynamics? A critical reappraisal of a one-sided argument,
Eur J Cardiothorac Surg 39(6):809–815, 2011
[10] Groen H.C. et. al., Plaque rupture in the carotid artery is localized at the high shear
stress region: a case report, Stroke, 38, pp. 2379-2381, 2007
[11] Groen H.C. et. al., High shear stress influences plaque vulnerability, Netherlands
Heart Journal, 16(7-8), pp. 280–283, 2008
[12] Guerciotti B., Computational comparison of haemodynamics in carotid arteries
before and after endarterectomy, Tesi di Laurea
[13] Guerciotti B. et al., Computational study of the fluid-dynamics in carotids before and
after endarterectomy, J Biomech. 4;49(1):26-38 doi:10.1016/ j.jbiomech., 2016
[14] Guntheroth W.G., A critical review of the American college of cardiology/American
heart association practice guidelines on bicuspid aortic valve with dilated ascending aorta,
Am J Cardiol. 102:107–110, 2008
[15] Heywood J.G. et al., Artificial boundaries and flux and pressure conditions for the
incompressible Navier-Stokes equations, International Journal for Numerical Methods in
Fluids, 22, pp. 325-352, 1996

74
[16] Hope M.D. et al., Images in cardiovascular medicine. Evaluation of bicuspid aortic
valve and aortic coarctation with 4d flow magnetic resonance imaging, Circulation
117:2818–9, 2008
[17] Kilner P.J. et al., Helical and Retrograde Secondary Flow Patterns in the Aortic Arch
Studied by Three Directional Magnetic Resonance Velocity Mapping, Circulation.
Nov;88(5 Pt 1):2235-47., 1993
[18] Klipstein R.H., Blood flow patterns in the human aorta studied by magnetic
resonance, Br Heart J. Oct;58(4):316-23, 1987
[19] Lancellotti R.M. et al., Large Eddy Simulations for blood fluid-dynamics in real
stenotic carotids, MOX-Report No. 63/2015, 2015
[20] Lantz J. et al., Numerical and experimental assessment of turbulent kinetic energy in
an aortic coarctation, Biomech.;46(11):1851-8. doi:10.1016/j.jbiomech.2013.04.028,
2013
[21] Lantz J. et al., Large eddy simulation of LDL surface concentration in a subject
specific human aorta, Biomech;45(3):537-42doi:10.1016/j.jbiomech.2011.11.039, 2012
[22] Lee C.-H. et al., Finite element analysis of helical flows in human aortic arch: A
novel index, Biomicrofluidics. 2014 Mar; 8(2): 024111, doi: 10.1063/1.4871037, 2014
[23] www.lifev.org
[24] Liu X. et al., A numerical study on the flow of blood and the transport of LDL in the
human aorta: the physiological significance of the helical flow in the aortic arch, Am J
Physiol Heart Circ Physiol. Jul;297(1):H163-70. doi: 10.1152/ajpheart.00266.2009, 2009
[25] Mahadevia R. et al., Bicuspid aortic cusp fusion morphology alters aortic three-
dimensional outflow patterns, wall shear stress, and expression of
aortopathy, Circulation. 129 (6): 673–82. doi:10.1161, 2014
[26] Morbiducci, U. et al., In Vivo Quantification of Helical Blood Flow in Human Aorta
by Time-Resolved Three-Dimensional Cine Phase Contrast Magnetic Resonance
Imaging, Ann Biomed Eng, 37: 516. doi:10.1007/s10439-008-9609-6, 209, 2008
[27] Morbiducci U. et al., Mechanistic insight into the physiological relevance of helical
blood flow in the human aorta an in vivo study, Biomech Model Mechanobiol.
Jun;10(3):339-55. doi: 10.1007/s10237-010-0238-2, 2011
[28] Morris L. et al., Effects of flat, parabolic and realistic steady flow inlet profiles on
idealised and realistic stent graft fits through Abdominal Aortic Aneurysms (AAA), Med
Eng Phys. Jan;28(1):19-26, 2006
[29] www.paraview.org
[30] Paul M.C., Large–Eddy simulation of pulsatile blood flow, Med Eng
Phys. Jan;31(1):153-9. doi: 10.1016/j.medengphy.2008.04.014, 2009
[31] Piccinelli M. et al., Impact of hemodynamics on lumen boundary displacements in
abdominal aortic aneurysms by means of dynamic computed tomography and

75
computational fluid dynamics, Biomech Model Mechanobiol. Nov;12(6):1263-76. doi:
10.1007/s10237-013-0480-5, 2013
[32] Quarteroni A. et al., Optimal control and shape optimization of aortocoronaric by-
pass anastomosis, M3AS; 13(12): 1801-1823, 2003
[33] Quarteroni A. et al., Numerical Approximation of Partial Differential Equations,
Springer, 1991
[34] Quarteroni A. et al., Mathematical Modelling and Numerical Simulation of the
Cardiovascular System, Computational Models for the Human Body,
http://dx.doi.org/10.1016/S1570-8659(03)12001-7, 2004
[35] Quarteroni A., Modellistica Numerica per Problemi Differenziali, Springer, 2012,
ISBN 978-88-470-2747-3
[36] Redaelli A., A Model of Health: Mathematical modeling tools play an important role
in optimizing new treatment options for heart disease, IEEE Pulse. Jul-Aug;6(4):27-32.
doi: 10.1109/MPUL.2015.2428683, 2015
[36] Renner J. et al., Is a Flat Inlet Profile Sufficient for WSS Estimation in the Aortic
Arch?, WSEAS Transactions on Fluid Mechanics, ISSN 1790-5087, Vol. 4, no 4, 2009
[37] Sabbah H.N. et al., Effect of turbulent blood flow on systolic pressure contour in the
ventricles and great vessels: significance related to anacrotic and bisferious pulses, Am J
Cardiol. Jun;45(6):1139-47, 1980
[38] Schaefer B.M. et al., Usefulness of bicuspid aortic valve phenotype to predict
elastic properties of the ascending aorta, Am J Cardiol ;99:686–90, 2007
[39] Shipkowitz T. et al., Numerical study on the effect of secondary flow in the human
aorta on local shear stresses in abdominal aortic branches, J Biomech.;33(6):717-28.,
2000
[39] Shitlman L. et al., On the role of helicity in complex fluid flows, Physics Letters A
Volume 113, Issue 1, 25 November 1985, Pages 32-37, 1985
[40] Shul’man Z.P. et al., Rheological factor and Fahraeus-Lindqvist effect, Journal of
Engineering Physics and Thermophysics, 68(3), pp.353-363, 1995
[41] Sievers H.H. et al., Aortopathy in bicuspid aortic valve diseasegenes or
hemodynamics? or Scylla and Charybdis?, Eur J Cardio-thorac Surg 39(6):803–804, 2011
[42] Silverthorn D.U., Fisiologia umana. Un approccio integrato, Pearson, 2013, ISBN
88-71-92963-2
[43] Smith G.D., Numerical Solution of Partial Differential Equations: Finite Difference
Methods, Clarendon Press, 1986, ISBN 978-0198596509
76
[44] Stalder A.F. et al., Blood Flow in the Healthy Aorta: Turbulent or not?, Proc. Intl.
Soc. Mag. Reson. Med, 2009
[45] Stalder A.F. et al., Assessment of flow instabilities in the healthy aorta using flow-
sensitive MRI, J Magn Reson Imaging. Apr;33(4):839-46. doi: 10.1002/jmri.22512.,
2011
[46] Stehbens W.E., Turbulence of blood flow, Experimental Physiology, 44 doi:
10.1113/expphysiol.1959.sp001365, 1959
[47] Stein P.D., Turbulent Blood Flow in the Ascending Aorta of Humans with Normal
and Diseased Aortic Valves, American Heart Association, Inc.,
https://doi.org/10.1161/01.RES.39.1.58, 1976
[48] Stein P.D., Turbulent blood flow in humans: its primary role in the production of
ejection murmurs, Circ Res. Jun;38(6):513-25, 1976
[49] Steinman D.A., Assumptions in modelling of large artery hemodynamic,
Modeling of Physiological Flows, 10.1007/978-88-470-1935-5_1, 2012
[50] Sugarawa M., Blood Flow in the Aorta, Blood Flow in the Heart and Large
Vessels, 10.1007/978-4-431-66919-7_1, 1989
[51] Tezduyar T.E. et al., Stabilized finite-element formulations for incompressible-flow
computations. Advances in Applied Mechanics, Vol 28, 28:1–44, 1992.
[52] Thomas J.W., Numerical partial differential equations: finite difference methods,
Springer, 1995, ISBN 978-1-4419-3105-4
[53] van der Wal A.C. et al., Atherosclerotic plaque rupture – pathologic basis of
plaque stability and instability, Cardiovascular Research, 41, pp. 334–344, 1999
[54] Vergara C. et al., Multiscale modeling and simulation of drug release from
cardiovascular stents, SIAM Multiscale Modeling and Simulation, 2007
[55] Vergara C. et al., Influence of Bicuspid Valve Geometry on Ascending Aortic Fluid
Dynamics:A Parametric Study, Artificial Organs 36(4):368–378, 2011
[56] www.vmtk.org
[57] Weigang E. et al., Flow-sensitive four-dimensional magnetic resonance imaging:
flow patterns in ascending aortic aneurysms, Eur J Cardiothorac Surg. Jul;34(1):11-6. doi:
10.1016/j.ejcts.2008.03.047, 2008
[58] www.wias-berlin.de/software/tetgen/
[59] Zheng T. et al., Numerical investigation of oxygen mass transfer in a helical-type
artery bypass graft, Comput Methods Biomech Biomed Engin. Apr;17(5):549-59. doi:
10.1080/10255842.2012.702764, 2014
[60] Zunino P., Multidimensional pharmacokinetic models applied to the design of drug
eluting stents, Cardiov. Eng.; 4(2), 2004