portable rt-middleware environment on a usb memory for the robot programing tool
TRANSCRIPT
○野際 章人(埼玉大学) 藤間 瑞樹(埼玉大学) 程島 竜一(埼玉大学) 琴坂 信哉(埼玉大学)
USBメモリに搭載したポータブル
RTM環境を用いたロボット教育ツール
Portable RT-Middleware environment on a USB memory for the robot programing tool

本発表の背景,目的
背景
OpenRTM-aistをより多くの方に体験頂くこと
普及の一環として,本発表では …
• ポータブルRTM環境の紹介
• ポータブルRTM環境を用いたロボット教育ツールの紹介 -> 工学系の教育現場で利用して頂きたい
• ARToolKitを利用したパレタイジングデモの紹介 -> OpenRTMにおける共通I/Fの強みを実感して頂きたい
1
ミドルウエア(OpenRTM,ORiN,OpenEL,…)の普及が課題
普及のためには,まず使ってもらうことが必要
目的

ポータブルRTM環境(OpenRTM Tutorial) 2-1
• 対応OS : Windows 7 / 8.1 • 対応ブラウザ : Internet Explorer (IE) • ブラウザベースのチュートリアル
Fig. 1 OpenRTM Tutorial
No. Demonstration
1 Image Processing (OpenRTM-aist, OpenCV)
2 Playing Movie via Voice (OpenHRI)
3 Create Robot Motions (Choreonoid)
4 Playing Motions via Voice (OpenHRI, Choreonoid)
5 Running New Motions Along with State Transition (SEATSAT)
Table 1 Demonstrations stored in the portable RTM environment
NEDO特別講座の一環で作製されたポータブルRTM環境 インストール一切不要でOpenRTMが使用可能 USBメモリに入れて頒布可能
仕様
• 株式会社 SUGAR SWEET ROBOTICS 菅様 • 一般社団法人 東京オープンソースロボティクス協会 に依頼して作製 • 国立研究開発法人 産業技術総合研究所 原様
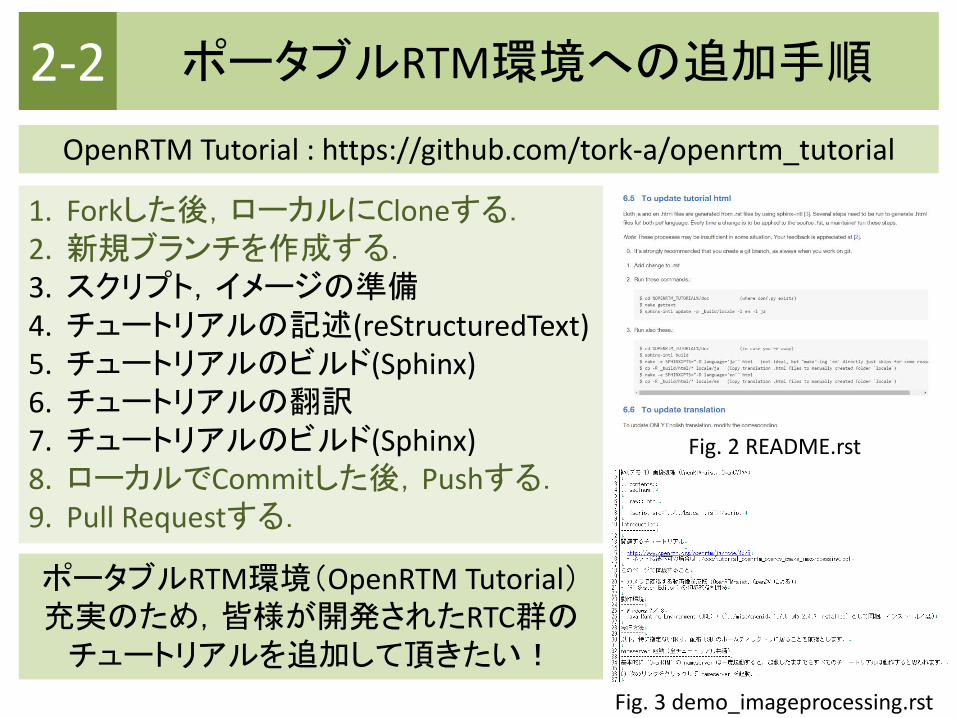
ポータブルRTM環境への追加手順 2-2
ポータブルRTM環境(OpenRTM Tutorial)充実のため,皆様が開発されたRTC群のチュートリアルを追加して頂きたい!
1. Forkした後,ローカルにCloneする. 2. 新規ブランチを作成する. 3. スクリプト,イメージの準備 4. チュートリアルの記述(reStructuredText) 5. チュートリアルのビルド(Sphinx) 6. チュートリアルの翻訳 7. チュートリアルのビルド(Sphinx) 8. ローカルでCommitした後,Pushする. 9. Pull Requestする.
Fig. 2 README.rst
OpenRTM Tutorial : https://github.com/tork-a/openrtm_tutorial
Fig. 3 demo_imageprocessing.rst
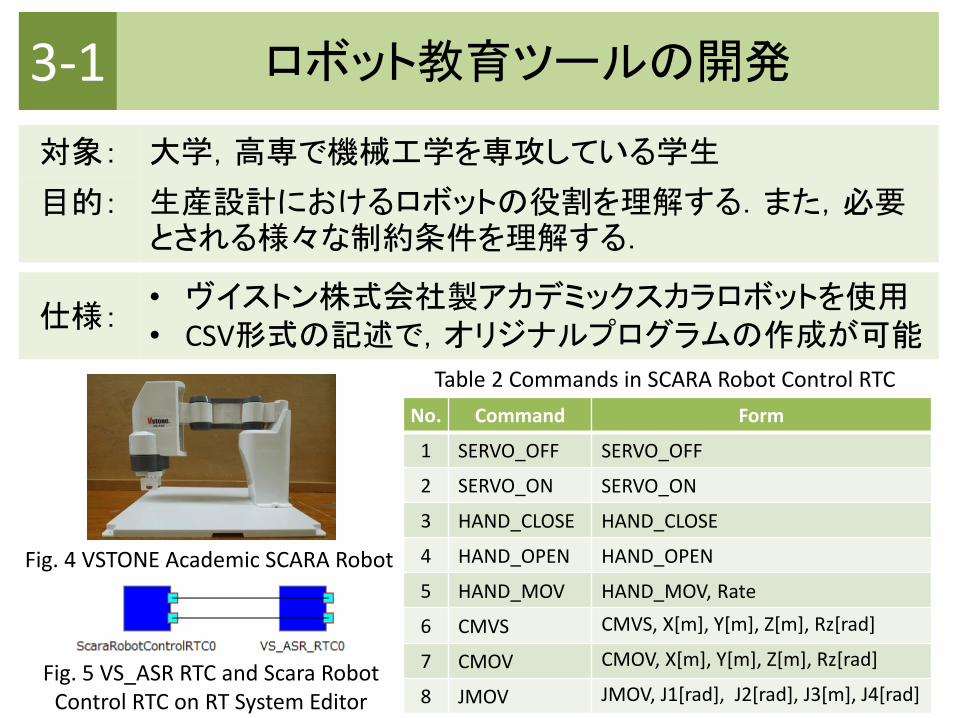
ロボット教育ツールの開発 3-1
Fig. 4 VSTONE Academic SCARA Robot
Fig. 5 VS_ASR RTC and Scara Robot Control RTC on RT System Editor
No. Command Form
1 SERVO_OFF SERVO_OFF
2 SERVO_ON SERVO_ON
3 HAND_CLOSE HAND_CLOSE
4 HAND_OPEN HAND_OPEN
5 HAND_MOV HAND_MOV, Rate
6 CMVS CMVS, X[m], Y[m], Z[m], Rz[rad]
7 CMOV CMOV, X[m], Y[m], Z[m], Rz[rad]
8 JMOV JMOV, J1[rad], J2[rad], J3[m], J4[rad]
大学,高専で機械工学を専攻している学生
目的:
対象:
仕様:
生産設計におけるロボットの役割を理解する.また,必要とされる様々な制約条件を理解する.
• ヴイストン株式会社製アカデミックスカラロボットを使用 • CSV形式の記述で,オリジナルプログラムの作成が可能
Table 2 Commands in SCARA Robot Control RTC
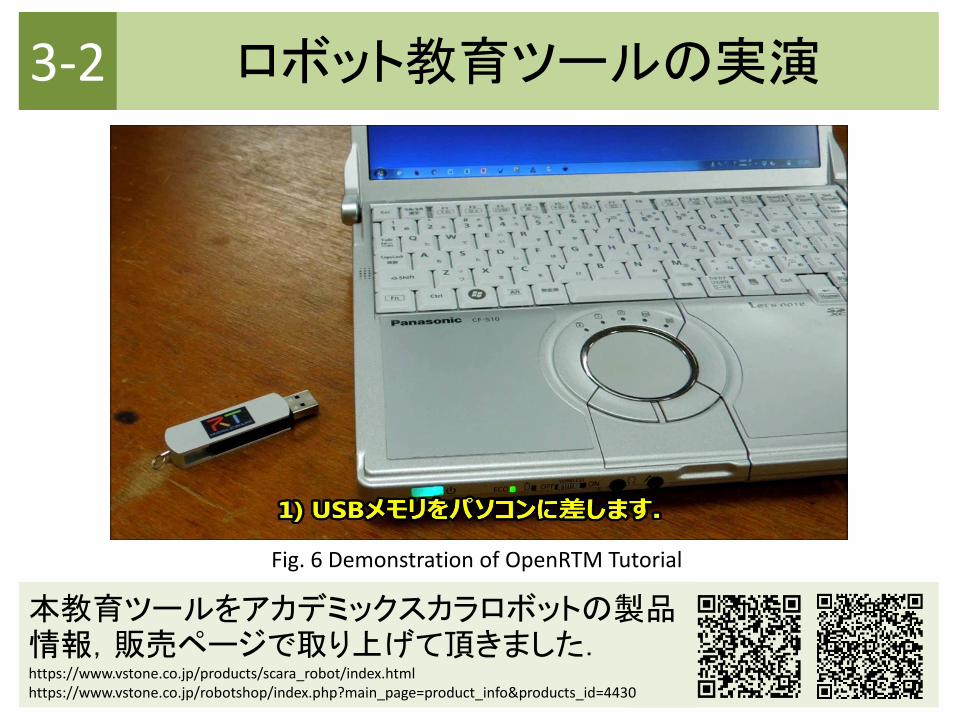
ロボット教育ツールの実演 3-2
Fig. 6 Demonstration of OpenRTM Tutorial
本教育ツールをアカデミックスカラロボットの製品情報,販売ページで取り上げて頂きました. https://www.vstone.co.jp/products/scara_robot/index.html https://www.vstone.co.jp/robotshop/index.php?main_page=product_info&products_id=4430

対象 : 大学,高専で機械工学を専攻している学生
対象: 工学部機械工学科の学生 計12名
目的 :
生産設計におけるロボットの役割を理解する.また,必要とされる様々な制約条件を理解する.
課題: • ロボットを中核とした生産セル設計 • 動作をスカラロボットで簡易的に実現
結果:
学生がロボットを導入した生産設計で生じる課題を導き出す様子が見られた.
例)ロボットの設置位置キャリブレーション,作業対象物の位置把握,…
考察: ロボットを用いることで,必要とされる条件を学生が自ら見い出し,対策を講じることができた.
ロボット教育ツールの実践 3-3
本教材を 用いる メリット!
Fig. 7 Exercise with Portable RTM environment
• 使い慣れたWindows + Excel(or メモ帳)を使用 • 一人一人にロボットを与えられる • 授業内でセットアップに費やす時間が最小限 • 理解し易い中レベルモーションコマンド
既に幾つかの大学で利用いただいております(首都大学東京,筑波大学,はこだて未来大学,産業技術短期大学,名城大学).

ARToolKitを使ったパレタイジングデモ 4
Fig. 8 RTCs on RT System Editor in case of VSTONE VS-ASR
Fig. 9 RTCs on RT System Editor in case of MITSUBISHI MELFA RV-3SD
Fig. 10 Palletizing by VSTONE VS-ASR Fig. 11 Palletizing by MITSUBISHI MELFA RV-3SD
ハードウエアRTCの交換で同一のパレタイジングデモの実現 • ロボットアーム共通I/F拡張版(JARA版)を利用【再利用性】 • ARToolKit部はデータ出力形式を揃えれば,他処理系でも代替可

国際ロボット展(12/2~5) 新エネルギー・産業技術総合開発機構(NEDO)ブース
5
• OpenRTMによるARToolKitを使ったパレタイジングデモ (1・2日目:VS_ASR,3・4日目:VS_ASR & MELFA RV-3SD)
• 来場者に対するOpenRTM-aistの説明等 • OpenRTM Tutorial入りのUSBメモリ配布(33名に配布)
Fig. 12 Proposals by NEDO on Middleware Technology
Fig. 13 Palletizing demo by VSTONE VS-ASR and MITSUBISHI MELFA RV-3SD
4日間の来場者数:270名(パンフレットのみを含まず)
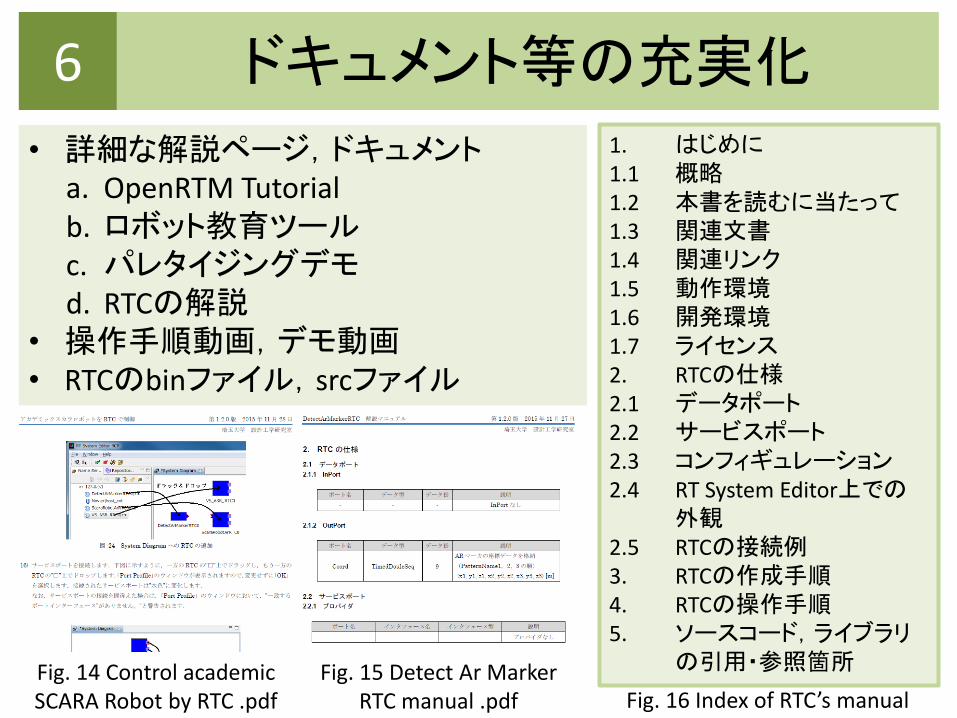
ドキュメント等の充実化 6
Fig. 16 Index of RTC’s manual
• 詳細な解説ページ,ドキュメント a. OpenRTM Tutorial b. ロボット教育ツール c. パレタイジングデモ d. RTCの解説
• 操作手順動画,デモ動画 • RTCのbinファイル,srcファイル
Fig. 15 Detect Ar Marker RTC manual .pdf
Fig. 14 Control academic SCARA Robot by RTC .pdf
1. はじめに 1.1 概略 1.2 本書を読むに当たって 1.3 関連文書 1.4 関連リンク 1.5 動作環境 1.6 開発環境 1.7 ライセンス 2. RTCの仕様 2.1 データポート 2.2 サービスポート 2.3 コンフィギュレーション 2.4 RT System Editor上での
外観 2.5 RTCの接続例 3. RTCの作成手順 4. RTCの操作手順 5. ソースコード,ライブラリ
の引用・参照箇所

まとめ 7
謝辞
本プロジェクトを実施するに当たり,以下に示す方々にご協力を賜りました.この場を借りて感謝の意を表します(順不同).国立研究開発法人 新エネルギー・産業技術総合開発機構(NEDO),株式会社 SUGER SWEET ROBOTICS 菅様,一般社団法人東京オープンソースロボティクス協会(TORK),国立研究開発法人 産業技術総合研究所(AIST) 原様,ヴイストン株式会社 様
• ポータブルRTM環境および新規チュートリアル追加手順の紹介 • USBメモリに搭載できるポータブルなロボット教育ツールを開発 • OpenRTM-aistおよびロボットアーム共通I/Fの利点を強調できるパレタイジングデモの実現,OpenRTM Tutorialへの実装
• 国際ロボット展でOpenRTM-aistの普及活動,パレタイジングデモの実演,OpenRTM Tutorialを搭載したUSBメモリの配布
会場内でも,USBメモリ配布行っています!
Fig. 17 USB flash memory
詳細は,プロジェクトページをご覧ください. すべての情報へのリンクがあります.
(http://www.openrtm.org/openrtm/ja/project/contest2015_04)