ppllaann ddee eessttuuddiiooss ddee llaa...
TRANSCRIPT

PPLLAANN DDEE EESSTTUUDDIIOOSS DDEE LLAA CCAARRRREERRAA
TTééccnniiccoo eenn MMeeccaattrróónniiccaa
RREEFFOORRMMAA IINNTTEEGGRRAALL DDEE LLAA EEDDUUCCAACCIIÓÓNN MMEEDDIIAA SSUUPPEERRIIOORR
Noviembre 2010
PROFESORES QUE ELABORARON LA ESTRUCTURA Y PROGRAMAS DE ESTUDIO DE LA CARRERA DE:
TÉCNICO EN MECATRÓNICA
NOMBRE ESTADO
Ricardo Camacho Jaimes Estado de México
Juan Eduardo de la Rosa Oliva Estado de México
Edgar Ovidio Barón Coahuila
Juan Duque Álvarez San Luis Potosí
Ing. Rafael Gama Hernández Guanajuato
Ing. José Bernabé Daniel Durán Puebla
REVISORES DE ESTILO
NOMBRE ESTADO
REVISORES DE METODOLOGÍA
NOMBRE ESTADO
CRÉDITOS

Mtro. Alonso Lujambio Irazábal Secretario de Educación Pública
Lic. Miguel Ángel Martínez Espinosa Subsecretario de Educación Media Superior
Lic. Luis F. Mejía Piña Director General de Educación Tecnológica Industrial
Ing. Celso G. Espinosa Corona Coordinador Nacional de Organismos Descentralizados de CECyTEs
Ing. Dagoberto Juárez Juárez Responsable de Desarrollo Académico de los CECyTEs
Ing. Armando Mendoza Cruz Responsable de Innovación Educativa de los CECyTES
DIRECTORIO

CRÉDITOS.
DIRECTORIO.
CONTENIDO.
INTRODUCCIÓN AL PLAN DE ESTUDIOS DE LA CARRERA DE TÉCNICO EN MECATRONICA
PERFILES DEL ALUMNO. Perfil de Ingreso
Perfil de Egreso
PERFILES DEL DOCENTE.
OBJETIVOS GENERALES DE LA CARRERA.
MÉTODOS Y ACTIVIDADES PARA ALCANZAR LOS OBJETIVOS Y ELPERFIL DE EGRESO.
MAPA CURRICULAR DEL BACHILLERATO TECNOLÓGICO EN TÉCNICO EN MECATRONICA.
MÓDULOS Y SUBMÓDULOS DE LA CARRERA DE TÉCNICO EN MECATRONICA.
RELACIÓN DE MÓDULOS CON NORMAS DE COMPETENCIA Y SITIOS DE INSERCIÓN LABORAL.
MÓDULOS, RESULTADOS DE APRENDIZAJE, EVIDENCIAS Y SITIOS DE INSERCIÓN.
CRITERIOS Y PROCEDIMIENTOS DE EVALUACIÓN DEL PLAN DE ESTUDIOS.
PROGRAMA DE ESTUDIOS DEL MÓDULO I DE LA CARRERA DE TÉCNICO EN MECATRONICA.
Descripción del Módulo I.
CONTENIDO

Propósitos Específicos de Aprendizaje del Módulo.
Métodos y Actividades Para Alcanzar los Propósitos de Aprendizaje del Módulo.
Desarrollo Didáctico de las Tecnologías de la Información y la Comunicación en el Módulo.
Recomendaciones Académicas Para Trabajo Interdisciplinario en el Logro de las Competencias Genéricas.
Competencias Genéricas Relacionadas.
Competencias Disciplinares Relacionadas.
Guía Didáctica del Submódulo I
Guía Didáctica del Submódulo II
Guía Didáctica del Submódulo III
Guía Didáctica del Submódulo IV
PROGRAMA DE ESTUDIOS DEL MÓDULO II DE LA CARRERA DE TÉCNICO EN MECATRONICA.
Descripción del Módulo II.
Propósitos Específicos de Aprendizaje del Módulo.
Métodos y Actividades Para Alcanzar los Propósitos de Aprendizaje del Módulo.
Desarrollo Didáctico de las Tecnologías de la Información y la Comunicación en el Módulo.
Recomendaciones Académicas Para Trabajo Interdisciplinario en el Logro de las Competencias Genéricas.
Competencias Genéricas Relacionadas.
Competencias Disciplinares Relacionadas.
Guía Didáctica del Submódulo I
Guía Didáctica del Submódulo II
Guía Didáctica del Submódulo III
Guía Didáctica del Submódulo IV
PROGRAMA DE ESTUDIOS DEL MÓDULO III DE LA CARRERA TÉCNICO EN MECATRONICA
Descripción del Módulo III.
Propósitos Específicos de Aprendizaje del Módulo.
Métodos y Actividades Para Alcanzar los Propósitos de Aprendizaje del Módulo.
Desarrollo Didáctico de las Tecnologías de la Información y la Comunicación en el Módulo.
Recomendaciones Académicas Para Trabajo Interdisciplinario en el Logro de las Competencias Genéricas.
Competencias Genéricas Relacionadas.
Competencias Disciplinares Relacionadas.
Guía Didáctica del Submódulo I
Guía Didáctica del Submódulo II
Guía Didáctica del Submódulo III
Guía Didáctica del Submódulo IV

PROGRAMA DE ESTUDIOS DEL MÓDULO IV DE LA CARRERA TÉCNICO EN MECATRONICA.
Descripción del Módulo IV.
Propósitos Específicos de Aprendizaje del Módulo.
Métodos y Actividades Para Alcanzar los Propósitos de Aprendizaje del Módulo.
Desarrollo Didáctico de las Tecnologías de la Información y la Comunicación en el Módulo.
Recomendaciones Académicas Para Trabajo Interdisciplinario en el Logro de las Competencias Genéricas.
Competencias Genéricas Relacionadas.
Competencias Disciplinares Relacionadas.
Guía Didáctica del Submódulo I
Guía Didáctica del Submódulo II
Guía Didáctica del Submódulo III
Guía Didáctica del Submódulo IV
PROGRAMA DE ESTUDIOS DEL MÓDULO V DE LA CARRERA TÉCNICO EN MECATRONICA
Descripción del Módulo V.
Propósitos Específicos de Aprendizaje del Módulo.
Métodos y Actividades Para Alcanzar los Propósitos de Aprendizaje del Módulo.
Desarrollo Didáctico de las Tecnologías de la Información y la Comunicación en el Módulo.
Recomendaciones Académicas Para Trabajo Interdisciplinario en el Logro de las Competencias Genéricas.
Competencias Genéricas Relacionadas.
Competencias Disciplinares Relacionadas.
Guía Didáctica del Submódulo I
Guía Didáctica del Submódulo II
Guía Didáctica del Submódulo III
Guía Didáctica del Submódulo IV
MATERIALES DE APOYO DIDÁCTICO
FUENTES DE INFORMACIÓN BÁSICA Y COMPLEMENTARIA
DOCUMENTOS ANEXOS
En los puntos de este apartado, el comité de Metodología completará la redacción.
El Bachillerato Tecnológico está integrado por tres componentes: básico, propedéutico y profesional; los cuales se
articulan para garantizar una formación integral a los alumnos a través de conocimientos que les permitirán el
desarrollo de habilidades, destrezas y actitudes a lo largo de su estancia en el Bachillerato, mismas que en un futuro
podrán llevar a escenarios de su vida cotidiana y productiva utilizando todo su potencial. Con base en lo anterior, y
atendiendo al tercer Eje de la Reforma Integral sobre los mecanismos de gestión, surge la necesidad de elaborar
Programas de Estudios pertinentes y flexibles que permitan el libre tránsito entre distintos Subsistemas, a través de la
homogeneización de las competencias Genéricas, Disciplinares y Profesionales que organizan los saberes de todos los
egresados de la Educación Media Superior. El propósito es, sin duda, el desarrollo de un contexto de aprendizaje
significativo que sea útil para la movilidad o portabilidad de los estudios; considerándose las competencias genéricas
como claves, transversales y transferibles a lo largo de la vida y trayectoria profesional de los alumnos. Todo lo
anterior da lugar a la actualización de los Programas de Estudios de las carreras que se ofertan en los CECyTEs.
En este Subsistema el componente de formación profesional esta organizado en módulos y le brinda dos importantes
posibilidades a los estudiantes que egresan: integrarse al ámbito productivo de sus localidades o bien, continuar sus
estudios en Instituciones de Nivel Superior; sin embargo, garantizar la pertinencia de los Planes y Programas de
Estudios requiere de una evolución constante y permanente de los mismos, como respuesta a las demandas sociales,
de la capacitación de educación tecnológica y de los sectores productivos, así como de cubrir las necesidades de
cada región del país.
Es importante destacar, que cada carrera técnica se elabora a partir de la orientación de las competencias
profesionales que corresponden a los sitios de inserción laboral. La construcción de esta estructura curricular
constituye el perfil de egreso del Sistema Nacional del Bachillerato en un marco de diversidad.
El programa de estudios actual contribuye al logro de las competencias profesionales, al mismo tiempo sustenta la
formación de las genéricas para desarrollarlas en el aula de acuerdo con lo establecido en el Marco Curricular
Común de la Reforma Integral de la Educación Media Superior.
Modalidad Educativa
Modelo Educativo
Duración del Ciclo
Componentes básico, propedéutico y profesional.
INTRODUCCIÓN AL PLAN DE ESTUDIOS DE LA CARRERA DE
TÉCNICO EN MECATRÓNICA

PERFIL DE INGRESO
Los aspirantes a ingresar a nuestros planteles, deberán haber concluido su educación media básica y cumplir con los requisitos contemplados en las Normas Específicas de Servicios Escolares; además de contar con las siguientes habilidades:
a) Resuelve problemas mediante el uso de operaciones y procesos aritméticos, geométricos y algebraicos. b) Interactúa en diferentes contextos utilizando el lenguaje oral y escrito. c) Maneja hábitos de estudio y técnicas de aprendizaje. d) Aplica las tecnologías de la información y comunicación. e) Observa reglas de convivencia para la vida en sociedad.
PERFIL DE EGRESO
PERFIL DE INGRESO
Los aspirantes a ingresar a nuestros planteles, deberán haber concluido su educación media básica y cumplir con los requisitos contemplados en las Normas Específicas de Servicios Escolares; además de contar con las siguientes habilidades:
a) Resuelve problemas mediante el uso de operaciones y procesos aritméticos, geométricos y algebraicos. b) Interactúa en diferentes contextos utilizando el lenguaje oral y escrito. c) Maneja hábitos de estudio y técnicas de aprendizaje. d) Aplica las tecnologías de la información y comunicación. e) Observa reglas de convivencia para la vida en sociedad.
PERFIL DE EGRESO
Los egresados de la Carrera de Técnico en Mecatrónica que de acuerdo a la normatividad del Bachillerato Tecnológico, les permite insertarse en el ámbito laboral y/o continuar en su formación superior .
El componente de formación básica se articula con el nivel de formación precedente, en especial con la secundaria técnica,
aborda los conocimientos esenciales de la ciencia, la tecnología y las humanidades, y es obligatorio. La formación básica aporta
fundamentos a la propedéutica y a la profesional. Sus asignaturas se abordan principalmente en los cuatro primeros semestres, y
PERFILES DEL ALUMNO
se distribuyen en cuatro campos de conocimiento: Matemáticas, Ciencias Naturales, Comunicación e Historia, sociedad y
tecnología.
El componente de formación propedéutica enlaza al bachillerato tecnológico con la educación superior; y pone énfasis en una profundización de los conocimientos que favorezcan el manejo pluridisciplinario e interdisciplinario, de tal modo que se logre una mejor incorporación a los estudios superiores. La formación propedéutica se organiza en tres áreas que permiten la convergencia e integración de los saberes previamente adquiridos: Físico-matemática, Químico-biológica y Económico-administrativa. El alumno debe cursar una de ellas, y puede elegirla con independencia de la especialidad de formación profesional que estudie
El profesional técnico en la carrera de técnico en Mecatrónica cuenta con competencias de desarrollo humano que le permiten desempeñarse en cualquier contexto social, familiar y laboral que coadyuvan a su desempeño profesional, en el área de la industria manufacturera, de alimentos, automotriz, metalurgia, textil, agroindustrias, plástico, etc. Deberá ser apto y competente para:
Manejar y controlar los procesos automatizados, utilizando mecanismos, sensores, actuadores, robots y controladores lógicos programables.
Mantener el equipo mecatrónico como motor trifásico, elementos neumáticos-hidráulicos, elementos mecánicos, electroválvulas, cilindros neumáticos-hidráulicos, sensores y lámparas de señalización.
Interpretar las principales simbologías y dispositivos para la lectura de esquemas electrónicos, eléctricos, mecánicos, neumáticos-hidráulicos.
Dominar el uso y manejo del equipo de cómputo y software CAD–CAM en el diseño y manufactura de piezas.
Utilizar eficazmente el Internet para búsqueda de todo tipo de información.
Usar y manejar las máquinas convencionales, como el torno y la fresadora; además de herramientas de taller en la fabricación de elementos mecánicos.
Diseñar y seleccionar las herramientas para el maquinado de piezas en centros de maquinado de control numérico.
Comprender el funcionamiento y operación de robots.
Y complementan con su formación básica adquiridas en las competencias de formación disciplinar.

MÓDULO I
El docente deberá tener conocimientos de electricidad y electrónica con el fin de tener la capacidad de diseñar circuitos eléctricos y electrónicos aplicables a sistemas automatizados de control, así como la manipulación de instrumentos de medición eléctrica y electrónica, conocimientos de nomenclatura de dispositivos electrónicos y manejo de computadora personal y software relacionado con eléctrica y electrónica su perfil académico podrá ser el de Ing. Mecatrónico, Ing. Electrónico. Contar con los valores y actitudes para relacionarse con los alumnos y compañeros docentes con el fin de lograr una relación constructiva y de cordialidad con sus semejantes.
MÓDULO II
Programar sistemas mecatrónicos requiere que el docente tenga los conocimientos de aplicación de lenguajes de programación para la solución de problemas y la programación de controladores lógicos programables, así como la conocimientos de hidráulica y neumática .en este modulo se necesitan docentes que tengan dos diferentes perfiles con conocimientos de electromecánica y sistemas computacionales. Deberá tener las habilidades y destrezas para manipular sistemas hidráulicos, neumáticos, eléctricos y programación de controladores lógicos programables para el submodulo de Automatiza Procesos Electro Neumáticos y Electro Hidráulicos por medio de PLC . Para el submódulo de programa sistemas mecatrónicos podrá programar en diversos lenguajes de programación así como la manipulación y programación de microcontroladores. Deberá de ser tolerante, responsable honesto, justo. Para relacionarse con los alumnos y sus compañeros docentes.
MÓDULO III
Elabora piezas mecánicas con maquinas de torno y fresa convencional y como de control numérico el docente deberá de tener conocimientos de metrología, resistencia de materiales, maquinas herramientas de procesos de manufactura, seguridad industrial, control numérico, hidráulica y neumática. Podrá tener la especialidad de Ing. Mecatrónico, Ing. Mecánico, Ing. En mantenimiento industrial, Ing. en manufactura. Contara con las habilidades y destrezas para operar maquinas de control numérico, así como maquinarias que intervienen en procesos de manufactura y crear programas de control numérico de diferentes protocolos. Deberá de ser tolerante, justo, respetuoso, ordenado disciplinado.
MÓDULO IV
Aplica procesos de manufactura asistido por computadora, el docente deberá de tener los conocimientos para manipular software de diseño, manufactura de procesos mecánicos, deberá tener los conocimientos de robótica, maquinas de control numérico,
PERFILES DEL DOCENTE

conocer los procesos de manufactura y mantenimiento a maquinaria industrial, podrá tener el perfil académico de Ing. mecatrónico, Ing. en robótica industrial, Ing. en control y automatización, Ing. mecánico y Ing. electromecánico. Deberá tener las habilidades y destrezas para manipular robots, software de diseño y maquinas de control numérico que intervengan en procesos de manufactura y dar mantenimiento a estos equipos y tener la capacidad de transmitirlos a los alumnos. Debe ser tolerante, disciplinado, ordenado y respetuoso.
MÓDULO V
Opera y realiza el mantenimiento a Sistemas Mecatrónicos. Los docentes podrán tener el perfil de Ing. mecatrónico, Ing. en control y automatización, Ing. Electrónico, Ing. industrial, Ing. en robótica. Con conocimientos de celdas de manufactura, robótica, procesos de manufactura la habilidad y conocimientos para transmitirlos a los alumnos y la habilidad y destreza para crear, manipular y realizar el mantenimiento a sistemas mecatrónicos o procesos industriales automatizados. deberá demostrar y explicar el mantenimiento, la operación y los procesos de manufactura con sistemas automáticos de control, auxiliar al alumno en la operación de sistemas mecatrónicos o asesorar en el desarrollo de un prototipo mecatrónico Perfil académico de los docentes y el papel que desarrollarán en relación con el estudiante.

El componente de formación básica se articula con el nivel de formación precedente, en especial con la secundaria técnica, aborda los conocimientos esenciales de la ciencia, la tecnología y las humanidades, y es obligatorio. La formación básica aporta fundamentos a la propedéutica y a la profesional. Sus asignaturas se abordan principalmente en los cuatro primeros semestres, y se distribuyen en cuatro campos de conocimiento: Matemáticas, Ciencias Naturales, Comunicación e Historia, Sociedad y Tecnología.
El componente de formación propedéutica enlaza al Bachillerato Tecnológico con la Educación Superior; y pone énfasis en una profundización de los conocimientos que favorezcan el manejo pluridisciplinario e interdisciplinario, de tal modo que se logre una mejor incorporación a los estudios superiores. La formación propedéutica se organiza en tres áreas que permiten la convergencia e integración de los saberes previamente adquiridos en las áreas: Físico-matemática, Químico-biológica y Económico-administrativa. El alumno debe cursar una de ellas, y puede elegirla con independencia de la especialidad de formación profesional que estudie.
La carrera de Técnico en Mecatrónica fue creada para dar solución a las demandas de la Industria en constante evolución, a partir del aumento en el desempeño de las fábricas con respecto a cantidades de producción, calidad del producto y eficiencia en cuanto a costo de producción para ser competitivas.
Se ha observado una creciente automatización de los procesos productivos en muchas empresas, de ahí y debido a la globalización, que es inminente la automatización en la producción industrial. A la vez, surge la necesidad de la especialización de mano de obra que conserve las máquinas, opere, instale y modifique sus dispositivos para su eficiente desempeño.
La carrera de técnico en Mecatrónica se encuentra dividida en módulos. El primer módulo se encarga de los dispositivos eléctricos y electrónicos (analógicos y digitales), donde el alumno adquiere las habilidades para utilizar estos dispositivos y verificar su funcionamiento; así como de adecuarlos a otras tecnologías para aprovecharlos en la automatización de procesos.
El segundo módulo se encarga de la programación de dispositivos como la PC, microcontroladores y PLC’s, para la implementación y mejora de sistemas Mecatrónicos; así como la hidráulica y neumática, indispensables en la automatización de procesos.
El tercer módulo se encarga de la fabricación de piezas mecánicas por torno y fresadora convencionales, así como en centros de maquinado de control numérico.
El cuarto módulo está orientado a que el alumno aprenda el software de diseño de piezas mecánicas (CAD), software de manufactura asistida por computadora (CAM) y la manipulación de robots; así como la programación de los mismos.
OBJETIVOS GENERALES DE LA CARRERA

En el quinto módulo, y con los conocimientos adquiridos , el alumno tiene la capacidad de crear enlaces entre sistemas neumáticos e hidráulicos, PLC’s, motores, crear pequeños sistemas mecatrónicos y supervisarlos en tiempo real con la ayuda de una PC; así como brindar el mantenimiento preventivo y correctivo a estos sistemas.
Para adquirir los conocimientos habilidades y destrezas de la carrera de técnico en Mecatrónica se realizan una serie de actividades que involucran aplicar diagnósticos de forma individual o de forma grupal para identificar a los estudiantes sobre el dominio y conocimiento que traen acerca de la Mecatrónica y se identifican las expectativas de los estudiantes acerca de lo que esperan aprender en el curso. Se coordinarán actividades en donde el alumno visualice lo que puede llegar a lograr al final del curso en cada modulo y submódulo y los contenidos de cada uno de ellos. En la etapa intermedia de los cursos se coordinarán investigaciones escritas de campo o aplicando las tecnologías de la información para que el alumno identifique su entorno y los elementos a considerar para cumplir con las competencias a desarrollar en todos los submódulos. Se efectuaran ejercicios, practicas siempre aplicando la supervisión y motivación para que el alumno tome la decisiones correctas, se efectuarán practicas demostrativas donde el alumno aprenderá el uso de las herramientas utilizadas en la Mecatrónica y los diferentes tipos de software de simulación. Se recrearan las simulaciones de situaciones para el ajuste de maquinaria, equipo de medición y manipulación de sistemas mecatrónicos para realimentar sus conocimientos habilidades y destrezas. Para el cierre se proponen elaboración de síntesis, conclusiones, reflexiones y productos terminados que permiten advertir los avances o resultados del aprendizaje de los alumnos realizando actividades de retroalimentación evaluación, practicas integradores, proyectos y se solicitara la elaboración de el portafolio de evidencias para la sistematización y valoración de las evidencias por producto, desempeño y conocimiento de la carrera de técnico en Mecatrónica.
MÉTODOS Y ACTIVIDADES PARA ALCANZAR LOS OBJETIVOS Y ELPERFIL DE EGRESO

COORDINACIÓN DE ORGANISMOS DESCENTRALIZADOS
ESTATALES DE CECyTEs
TÉCNICO EN MECATRÓNICA CLAVE TMT- 08
1er. Semestre
2º. Semestre
3er. Semestre
4º. Semestre
5º. Semestre
6º. Semestre
Álgebra 4 horas
Geometría y Trigonometría
4 horas
Geometría Analítica 4 horas
Cálculo 4 horas
Probabilidad y Estadística 5 horas
Matemática Aplicada 5 horas
Inglés I 3 horas
Inglés II 3 horas
Inglés III 3 horas
Inglés IV 3 horas
Inglés V 5 horas
Optativa 5 horas
Química I 4 horas
Química II 4 horas
Biología 4 horas
Física I 4 horas
Física II 4 horas
Asignatura específica del área propedéutica correspondiente (1)
5 horas
Tecnologías de la Información
y la Comunicación 3 horas
Lectura, Expresión Oral y Escrita II
4 horas
Ciencia, Tecnología, Sociedad y Valores II
4 horas
Ecología
4 horas
Ciencia, Tecnología, Sociedad y Valores III
4 horas
Asignatura específica del área propedéutica correspondiente (2)
5 horas
Ciencia, Tecnología, Sociedad y Valores I
4 horas Módulo I
Realiza mantenimiento a circuitos eléctricos y
electrónicos.
Módulo II .
Programa sistemas Mecatrónicos.
Módulo III Elabora piezas mecánicas con
torno y fresadora convencional y de control
numérico.
Módulo IV Aplica procesos de manufactura
asistido por computadora.
Módulo V Opera y realiza el mantenimiento a
sistemas Mecatrónicos. Lectura, Expresión Oral y Escrita I
4 horas
COMPONENTE DE FORMACIÓN BÁSICA 1, 200 HORAS
COMPONENTE DE FORMACIÓN PROPEDÉUTICA 480 HORAS
COMPONENTE DE FORMACIÓN PROFESIONAL 1, 200 HORAS
Área Físico – Matemáticas Temas de Física (1) Dibujo Técnico (2)
Área Económico – Administrativas Administración (1)
Economía (2)
Área Químico – Biológicas Bioquímica (1)
Biología Contemporánea (2)
ESTRUCTURA CURRICULAR DEL BACHILLERATO TECNOLÓGICO EN MECATRONICA CLAVE TMT- 08
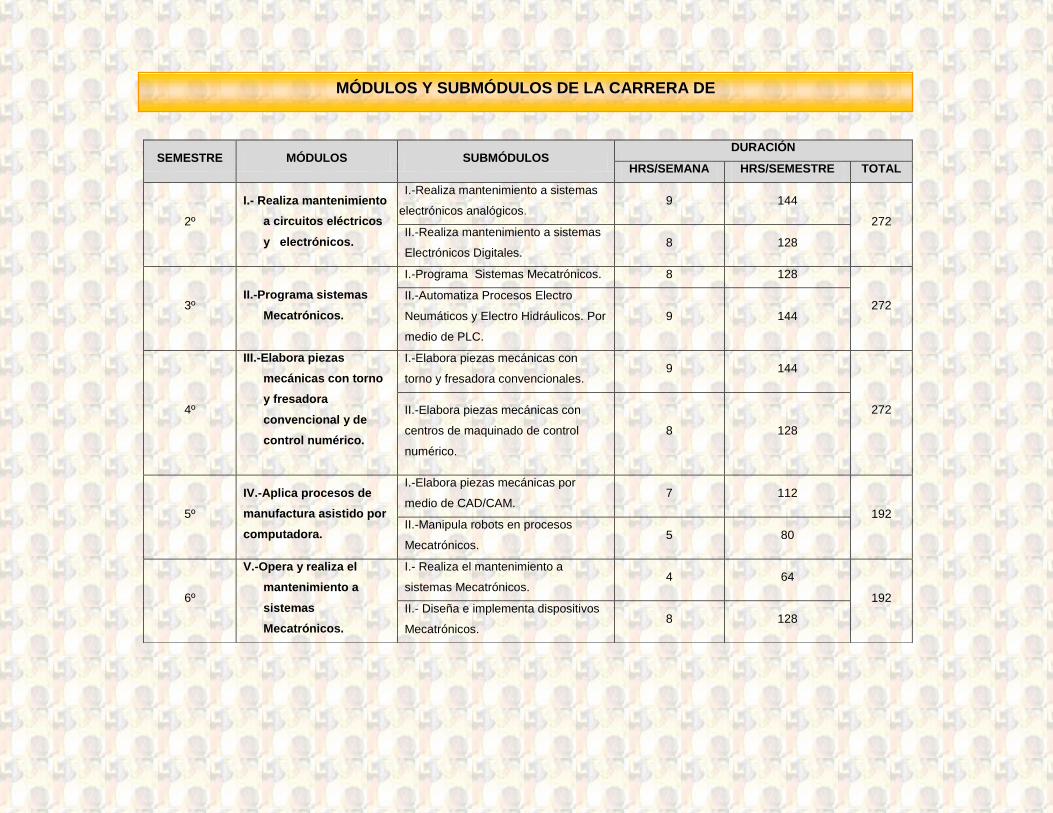
SEMESTRE MÓDULOS SUBMÓDULOS DURACIÓN
HRS/SEMANA HRS/SEMESTRE TOTAL
2º
I.- Realiza mantenimiento
a circuitos eléctricos
y electrónicos.
I.-Realiza mantenimiento a sistemas
electrónicos analógicos. 9 144
272 II.-Realiza mantenimiento a sistemas
Electrónicos Digitales. 8 128
3º II.-Programa sistemas
Mecatrónicos.
I.-Programa Sistemas Mecatrónicos. 8 128
272 II.-Automatiza Procesos Electro
Neumáticos y Electro Hidráulicos. Por
medio de PLC.
9 144
4º
III.-Elabora piezas
mecánicas con torno
y fresadora
convencional y de
control numérico.
I.-Elabora piezas mecánicas con
torno y fresadora convencionales. 9 144
272 II.-Elabora piezas mecánicas con
centros de maquinado de control
numérico.
8 128
5º
IV.-Aplica procesos de
manufactura asistido por
computadora.
I.-Elabora piezas mecánicas por
medio de CAD/CAM. 7 112
192 II.-Manipula robots en procesos
Mecatrónicos. 5 80
6º
V.-Opera y realiza el
mantenimiento a
sistemas
Mecatrónicos.
I.- Realiza el mantenimiento a
sistemas Mecatrónicos. 4 64
192 II.- Diseña e implementa dispositivos
Mecatrónicos. 8 128
MÓDULOS Y SUBMÓDULOS DE LA CARRERA DE

MÓDULO NORMAS DE COMPETENCIA SITIOS DE INSERCIÓN
Realiza el mantenimiento a circuitos eléctricos y electrónicos
CMEC0424.01 Mantenimiento de sistemas eléctricos
En áreas que fabrican, ensamblan o comercializan productos utilizando sistemas electrónicos.
Programa sistemas mecatrónicos
CCFE0563.01 Mantenimiento a actuadores finales de control.
En áreas de programación de máquinas para automatizar la producción.
Elabora piezas mecánicas con torno y fresadora convencional y de control numérico
CMME0357.01 Maquinado de piezas por desprendimiento de viruta.
En áreas que utilizan en sus procesos de manufactura, máquinas y herramientas.
Aplica procesos de manufactura asistido por computadora
En áreas que tienen procesos de fabricación o ensamble.
Opera y realiza mantenimiento a sistemas mecatrónicos.
CCEFE0632.01 Mantenimiento a controladores automatizados. CMEC0411.01 Mantenimiento a sistemas electrónicos y microprocesados.
En áreas que operan sistemas automáticos.
RELACIÓN DE MÓDULOS CON NORMAS DE COMPETENCIA Y SITIOS DE INSERCIÓN LABORAL

MÓDULO RESULTADO DE
APRENDIZAJE DEL MÓDULO EVIDENCIAS
MÉTODOS Y PROCEDIMIENTOS DE
EVALUACIÓN
I.- Realiza mantenimiento a
circuitos eléctricos y
electrónicos.
Al termino del módulo el alumno será capaz de realizar las reparaciones e instalación de circuitos eléctricos y electrónicos de sistemas de control utilizados en la industria. Asi como realizar el mantenimiento de dispositivos electrónicos.
Las evidencias utilizadas para este submódulo serán: Cuestionarios, guías de observación, reportes de
práctica, listas de cotejo, rubrica
Los elementos de evaluación considerando los componentes que forman este módulo serán : Coevalaución, autoevaluación, heteroevaluación
II.-Programa sistemas Mecatrónicos.
Al termino del submódulo el alumno será capaz de realizar programas de control para sistemas automatizados con aplicación de los elementos como son PLC´s, microcontroladores y PC, modificar programas de control y verificar su funcionamiento así como la manipulación de dispositivos mecánicos que funcionan con hidráulica y neumática.
Las evidencias utilizadas para este submódulo serán: Cuestionarios, guías de observación, reportes de
práctica, listas de cotejo, rubrica
Los elementos de evaluación considerando los componentes que forman este módulo serán : Coevalaución, autoevaluación, heteroevaluación
III.-Elabora piezas mecánicas con torno y fresadora convencional y de control numérico
Al termino del modulo el alumno será capaz de fabricar, modificar y ajustar piezas mecánicas que se utilizan en sistemas mecatrónicos, interpretar planos de piezas mecánicas para su fabricación y verificación.
Las evidencias utilizadas para este submódulo serán: Cuestionarios, guías de observación, reportes de
práctica, listas de cotejo, rubrica, producto terminado.
Los elementos de evaluación considerando los componentes que forman este módulo serán : Coevalaución, autoevaluación, heteroevaluación
IV.-Aplica procesos de manufactura asistido por computadora.
El alumno será capaz de programar maquinas de control numérico que se utilizan para la fabricación de piezas mecánicas y robots que se utilizan en sistemas mecatrónicos. Operar estas maquinas de control numérico y verificar su funcionamiento
Las evidencias utilizadas para este submódulo serán: Cuestionarios, guías de observación, reportes de
práctica, listas de cotejo, rubrica, producto terminado.
Los elementos de evaluación considerando los componentes que forman este módulo serán : Coevalaución, autoevaluación, heteroevaluación
V.-Opera y realiza el mantenimiento a sistemas
El alumno ejecutara el mantenimiento a sistemas mecatrónicos y participara en la instalación, reparación, y operación de sistemas automatizados
Las evidencias utilizadas para este submódulo serán: Cuestionarios, guías de observación, reportes de
práctica, listas de cotejo, rubrica,
Los elementos de evaluación considerando los componentes que forman este módulo serán : Coevalaución, autoevaluación, heteroevaluación
MÓDULOS, RESULTADOS DE APRENDIZAJE, EVIDENCIAS Y SITIOS DE INSERCIÓN

Mecatrónicos.
de control. producto terminado.
En este espacio no habrá aportaciones de parte del comité técnico, queda reservado para el comité de Metodología.
CRITERIOS Y PROCEDIMIENTOS DE EVALUACIÓN DEL PLAN DE ESTUDIOS

Noviembre 2010
PPRROOGGRRAAMMAA DDEE EESSTTUUDDIIOO
TTééccnniiccoo eenn MMeeccaattrróónniiccaa
Módulo I
Realiza mantenimiento a sistemas electrónicos analógicos.
RREEFFOORRMMAA IINNTTEEGGRRAALL DDEE LLAA EEDDUUCCAACCIIÓÓNN MMEEDDIIAA SSUUPPEERRIIOORR

El presente modulo tiene la función de capacitar al alumno en el diagnóstico y reparación de sistemas electrónicos analógicos y digitales, para dar servicio de mantenimiento a dispositivos e instrumentos eléctricos y electrónicos que alimentan y/o controlan una máquina o proceso, tarjetas electrónicas y localizar fallas en pistas de cobre de circuitos impresos o falsos contactos en soldaduras mal ejecutadas.
A través de ejemplos, ejercicios, prácticas e investigaciones, aplicados con diversas técnicas didácticas, el alumno adquiere las habilidades v destrezas para evaluar circuitos eléctricos y electrónicos, emitiendo un diagnóstico y aportando instrucciones para realizar la compostura o para delegar esa responsabilidad.
Al primer submódulo le ha sido asignada una cantidad de 9 hrs. por semana, con el objeto de incluir, primeramente las características físicas de la electricidad, para posteriormente continuar con la simbología eléctrica y electrónica; interpretación de planos y prácticas con elementos discretos (diodo, transistor, FET, regulador) que le revelarán las condiciones de funcionamiento de cada circuito, al medir personalmente parámetros como voltajes, corrientes, potencias, frecuencias, inductancias, etc. en aplicaciones de rectificación, conmutación y regulación de voltaje. Se ha reforzado el aprendizaje mediante uso de software simulador. Utiliza y manipula dispositivos semiconductores (diodo, transistor, FET, regulador) en aplicaciones de rectificación, conmutación y regulación de voltaje. Utiliza dispositivos tiristores como el DIAC TRIAC y SCR, PUT, UJT, amplificadores operacionales y opto acopladores en aplicaciones de manejo y control de potencia.
El sitio de inserción al terminar el modulo son industrias donde apliquen procesos de control e instrumentación. El egresado tiene la capacidad de realizar mantenimiento a sistemas electrónicos analógicos, digitales, modificar procesos, o puede desarrollarse como microempresario en la reparación de equipo electrónico.
DESCRIPCIÓN DEL MÓDULO I

NOMBRE DEL SUB
MÓDULO
PROPÓSITOS ESPECÍFICOS DE APRENDIZAJE
1.- Realiza mantenimiento a
sistemas electrónicos
analógicos.
En este submódulo el alumno adquiere los
conocimientos sobre eléctrica y electrónica analógica para
aplicarlos a sistemas automatizados de control en sistemas
mecatrónicos y poder realizar el mantenimiento a equipo
eléctrico y electrónico que se utiliza en estos sistemas
2.- Realiza mantenimiento a sistemas Electrónicos Digitales.
Aplica los conocimientos sobre electrónica digital para
modificar, actualizar, mejorar los sistemas de control de sistemas
mecatrónicos para dar mantenimiento o integrarlos a sistemas
mecatrónicos
.
PROPÓSITOS ESPECÍFICOS DE APRENDIZAJE DEL MÓDULO
Para el Bachillerato Tecnológico, cada docente es responsable de las actividades que se desarrollan en el aula, laboratorio o
taller, que favorecen el desarrollo de aprendizajes basados en competencias, por lo que su trabajo es facilitar el conocimiento
de tal forma que trasciendan las prácticas tradicionales de enseñanza para que adopte un enfoque centrado en el aprendizaje
de los diferentes contextos a través del constructivismo. Por lo que en este apartado encontrarás recomendaciones para el
aprovechamiento de los Programas de Estudios del componente profesional tales como:
Las competencias adquieren los egresados de la carrera de técnico en Mecatrónica son el resultado de la investigación de
los requerimientos de la industria automotriz, de alimentos, plástico, metalurgia, química, etc. Que cuentan con sistemas
automatizados de control para producción. Para que el egresado de la carrera de técnico en Mecatrónica posea las habilidades y
destrezas para realizar actividades de operación, instalación y mantenimiento de sistemas mecatrónicos.
Desarrollamos las competencias proponiendo un ciclo de trabajo que involucra los siguientes puntos: investigaciones,
investigaciones de campo, ejemplos, ejercicios, prácticas, prácticas integradoras y proyectos tomando en cuenta errores típicos
y contingencias que darán al alumno los conocimientos y destrezas para adquirir las competencias genéricas del técnico en
Mecatrónica. En este submódulo el alumno aprenderá los sistemas eléctricos electrónicos que intervienen en un sistema
Mecatrónico para realizar, el mantenimiento, diagnosticar el funcionamiento y modificar la operación de algún circuito eléctrico o
electrónico.
MÉTODOS Y ACTIVIDADES PARA ALCANZAR LOS PROPÓSITOS DE APRENDIZAJE DEL MÓDULO
En aplicaciones de electrónica eléctrica y electrónica digital existen varias herramientas computacionales que ayudan al alumno a entender y desarrollar aplicaciones eléctricas y electrónicas como son:
La busque de de información en la internet
Utilizar software de simulación eléctrica y electrónica para entender circuitos electrónicos
Todas las hojas de características de un semiconductor se encuentran en la internet
Crear el diseño de tablilla electrónica con software de diseño electrónico
Verificar el funcionamiento de un circuito impreso en un simulador
Realizar las practicas en el simulador antes de verificarlas de maneras real
DESARROLLO DIDÁCTICO DE LAS TECNOLOGÍAS DE LA INFORMACIÓN Y LA COMUNICACIÓN
EN EL MÓDULO

El curso abarca competencias que en particular, requiere de conocimientos previos que el alumno debe poseer al tomar el curso.
Lógica matemática es de vital importancia para lograr un aprendizaje significativo el cuál se puede lograr mediante estrategias
didácticas que encaminen a desarrollar esta habilidad.
El dominio del idioma inglés facilita al alumno a comprender con claridad las características de los semiconductores así como del
software de simulación durante el curso. Por otra parte, gran parte de los manuales y herramientas disponibles para la
automatización de procesos de control dirigidos a sistemas mecatrónicos, se encuentran el idioma inglés.
El curso abarca relevantemente el uso de circuitos eléctricos y electrónicos, los cuales forman parte del sistema mecatrónico que
el alumno debe manipular y creara innovaciones que lo motivaran a superarse y lograr sus metas personales.
Por otra parte, el alumno realiza investigaciones que lo forzan a desarrollar la habilidad de investigar y comprender una lectura. El
alumno debe hacer uso de las técnicas de lectura y redacción adquiridas durante su formación académica para formular trabajos
de acuerdo a las necesidades.
RECOMENDACIONES ACADÉMICAS PARA TRABAJO INTERDISCIPLINARIO EN EL LOGRO DE
LAS COMPETENCIAS GENÉRICAS
SUBMÓDULO COMPETENCIAS GENÉRICAS A DESARROLLARSE.
Realiza mantenimiento a sistemas electrónicos
analógicos.
- Se conoce y valora a sí mismo y aborda problemas y
retos teniendo en cuenta los objetivos que persigue.
- Escucha, interpreta y emite mensajes pertinentes en
distintos contextos mediante la utilización de medios,
códigos y herramientas apropiados.
- Desarrolla innovaciones y propone soluciones a problemas a partir de métodos establecidos.
- Sustenta una postura personal sobre temas de interés y
relevancia general, considerando otros puntos de vista
de manera crítica y reflexiva.
- Aprende por iniciativa e interés propio a lo largo de la
vida.
- Participa y colabora de manera efectiva en equipos
diversos.
Realiza mantenimiento a sistemas
Electrónicos Digitales.
- Se conoce y valora a sí mismo y aborda problemas y
retos teniendo en cuenta los objetivos que persigue.
- Escucha, interpreta y emite mensajes pertinentes en
distintos contextos mediante la utilización de medios,
códigos y herramientas apropiados.
- Desarrolla innovaciones y propone soluciones a
COMPETENCIAS GENÉRICAS RELACIONADAS

problemas a partir de métodos establecidos.
- Sustenta una postura personal sobre temas de interés y
relevancia general, considerando otros puntos de vista
de manera crítica y reflexiva.
- Aprende por iniciativa e interés propio a lo largo de la
vida.
- Participa y colabora de manera efectiva en equipos diversos.

SUBMÓDULO COMPETENCIAS DISCIPLINARES A DESARROLLARSE.
Realiza mantenimiento a sistemas electrónicos
analógicos.
Cuantifica, representa y contrasta experimental o matemáticamente
magnitudes del espacio que lo rodea.
Interpreta tablas, gráficas, mapas, diagramas y textos con símbolos
matemáticos y científicos.
Explica el funcionamiento de máquinas de uso común a partir de
nociones científicas.
Contrasta los resultados obtenidos en una investigación o
experimento con hipótesis previas y comunica sus conclusiones.
Relaciona las expresiones simbólicas de un fenómeno de la
naturaleza y los rasgos observables a simple vista o mediante
instrumentos o modelos científicos.
Realiza mantenimiento a sistemas
Electrónicos Digitales.
Cuantifica, representa y contrasta experimental o matemáticamente
magnitudes del espacio que lo rodea.
Interpreta tablas, gráficas, mapas, diagramas y textos con símbolos
matemáticos y científicos.
Explica el funcionamiento de máquinas de uso común a partir de
nociones científicas.
COMPETENCIAS DISCIPLINARES RELACIONADAS

Contrasta los resultados obtenidos en una investigación o
experimento con hipótesis previas y comunica sus conclusiones.
Relaciona las expresiones simbólicas de un fenómeno de la
naturaleza y los rasgos observables a simple vista o mediante
instrumentos o modelos científicos.
MÓDULO I Realiza mantenimiento a circuitos eléctricos y electrónicos. HRS/SEMESTRE
272
SUBMÓDULO I Realiza mantenimiento a sistemas electrónicos analógicos. HRS/SEMESTRE
144
RESULTADO DE
APRENDIZAJE DEL
SUBMÓDULO
Al término del módulo el alumno será capaz de realizar mantenimiento a circuitos eléctricos y
electrónicos.
COMPETENCIAS PROFESIONALES ESTRATEGIAS DIDÁCTICAS PARA EL
LOGRO DE LAS COMPETENCIAS. EVIDENCIAS
ELEMENTOS PARA LA
EVALUACIÓN
1. Interpreta y analiza las características de la energía eléctrica de acuerdo a las leyes de la física.
Atributos de la Competencia:
Obtiene información de energía eléctrica y sus fenómenos físicos.
Grafica e identifica los tipos de energía eléctrica (corriente
APERTURA:
Encuadre grupal para:
Recuperar conocimientos y experiencia previos a través de una evaluación diagnóstica.
Promover la integración grupal y la comunicación.
Identificar las expectativas de los alumnos.
Presentar el módulo mencionando nombre,
Conocimiento
Cuestionario
Resumen
EVALUACIÓN DIAGNÓSTICA
Coevalaución
Autoevaluación
GUÍA DIDÁCTICA DEL SUBMÓDULO I
alterna y corriente directa).
Identifica a los elementos pasivos (resistencia, capacitancia e inductancia)
Obtiene información vía electrónica y escrita
Determina el valor óhmico de las resistencias.
Determina el valor capacitivo de los capacitores.
Saberes de la competencia:
Variables eléctricas (voltaje, corriente, resistencia y frecuencia).
Notación científica.
Ley de ohm.
Tabla de valores de resistencia.
Código de colores.
Código de capacitores.
justificación, competencias de ingreso, duración y resultado de aprendizaje.
Presentar el submódulo mencionando el resultado de aprendizaje, duración, contenido, metodología de trabajo, normas de convivencia y formas de evaluación.
Coordinar con las diferentes academias de interés del Componente de Formación Básica, con el propósito de establecer estrategias de apoyo para el dominio de los aspectos conceptuales.
DESARROLLO:
Promueve una investigación bibliográfica de los fundamentos (voltaje, corriente, resistencia, potencia, múltiplos, submúltiplos, de unidades eléctricas y notación científica) , sensibilidad y calibración de los instrumentos de medición.
Realiza la demostración de cómo se determinan los valores de voltaje y corriente y resistencia de un circuito eléctrico.
Promueve una práctica grupal para realizar un circuito eléctrico y obtener la medición de variables
Desempeño
Guía de Observación
Reporte
Ejercicios
EVALUACIÓN
FORMATIVA
Autoevaluación
Coevaluación

eléctricas (corriente, voltaje y resistencia) compara los resultados teóricos con los resultados prácticos y verifica su validez.
CIERRE
Realizar la retroalimentación y se
procede a la evaluación mediante
un reporte de práctica la
evaluación.
Se realiza una práctica integradora
1. Producto
2. Lista de Cotejo
3. Reporte de resultados
4. Producto terminado
5. Ejercicios
6.
EVALUACIÓN SUMATIVA
Autoevaluación
Heteroevaluación
2. Manipula dispositivos de medición eléctrica y electrónica según normas establecidas.
Atributos de la Competencia:
Obtiene información de operación de manuales.
Obtiene información vía electrónica y escrita.
Compara el impacto de la sensibilidad de los medidores.
Calibra los instrumentos de medición.
Interpreta resultados
APERTURA :
Recuperar conocimientos previos con relación al uso de las herramientas manuales y automáticas como apoyo en la medición de variables eléctricas.
Obtiene la información del uso de las herramientas de medición eléctrica de los manuales de operación.
DESARROLLO:
El profesor realiza la demostración de cómo se determinan los valores de voltaje y corriente y resistencia de un circuito eléctrico.
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
EVALUACIÓN DIAGNÓSTICA
Heteroevaluación
EVALUACIÓN
FORMATIVA
Coevaluación
Heteroevaluación
obtenidos de los instrumentos de medición.
Aplica normas de seguridad para la manipulación de estos dispositivos.
Comprueba las características de un circuito eléctrico divisor de voltaje, corriente, para circuitos en serie, paralelo y mixto.
Saberes de la competencia:
variables eléctricas (Voltaje, corriente, resistencia y frecuencia).
Notación científica.
Ley de ohm.
Multímetro.
Osciloscopio.
Generador de funciones.
Potencia aparente y potencia real.
Mantenimiento preventivo.
Realiza la demostración para comparar el impacto de la sensibilidad de los medidores.
Realiza la demostración para la calibración y utiliza los instrumentos de medición de acuerdo al manual de uso y las medidas de seguridad e higiene.
CIERRE:
El profesor plantea una práctica grupal donde el alumno sigua las instrucciones y obtenga en resultado de armar y comprobar un circuito eléctrico con elementos pasivos apoyado con los instrumentos de medición.
Ejercicios
7. Producto
8. Lista de Cotejo
9. Reporte de resultados
10. Producto terminado
Ejercicios Rubrica
EVALUACIÓN SUMATIVA
Heteroevaluación
Autoevaluación
.
3. Utiliza y manipula dispositivos semiconductores (diodo, transistor, FET, regulador) en aplicaciones de rectificación, conmutación y regulación de voltaje.
Atributos de la Competencia:
Interpreta diagramas de circuitos eléctricos y electrónicos.
Aplica normas de seguridad para la manipulación de estos dispositivos
Obtiene información de operación de dispositivos electrónicos vía electrónica y escrita
Representar gráficamente dispositivos eléctricos y electrónicos
Realiza circuitos electrónicos con los dispositivos siguiendo un procedimientos establecidos
Elabora reporte de resultados
Saberes de la competencia:
Normas de símbolo
Carta de simbología
APERTURA :
Recupera conocimientos previos relacionados con el uso de diagramas eléctricos y mediante investigaciones de hojas de características de los dispositivos electrónicos.
Mediante esquemas los alumnos exponen y discuten las características de los semiconductores y los métodos de verificación de funcionamiento.
DESARROLLO:
Presenta los símbolos eléctricos y electrónicos para su análisis e interpretación.
Promover trabajo en colaboración para integrar en un diagrama esquemático la simbología eléctrica y electrónica.
El profesor plantea una práctica grupal con procedimientos de rectificación y regulación de corriente directa utilizando los instrumentos de medición para que el alumno obtenga los resultados de operación
CIERRE:
Realizar la retroalimentación y la evaluación correspondiente para verificar el logro de las
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
11. Producto
12. Lista de Cotejo
13. Reporte de resultados
14. Producto terminado
Ejercicios
EVALUACIÓN DIAGNÓSTICA
Heteroevaluación
EVALUACIÓN FORMATIVA
Coevaluación
Heteroevaluación
EVALUACIÓN SUMATIVA
Coevauación
Autoevaluación

Diagramas electrónicos
variables eléctricas
Transformadores
Semiconductores
Circuitos integrados reguladores
competencias y el alumno entrega reporte de práctica con los lineamientos de los criterios de evaluación.
Rubrica
4. Manipula software de simulación para la comprobación previa de funcionamiento de dispositivos semiconductores en circuitos electrónicos analógicos.
Atributos de la Competencia:
Manipula software de simulación de circuitos electrónicos.
Utiliza las librerías, tutoriales y ayuda del software.
Interpreta diagramas de circuitos eléctricos y electrónicos.
Evalúa y distingue los resultados obtenidos de la simulación.
Elabora reporte de resultados.
Saberes de la competencia:
Manejo de computadora personal
Conocimientos básicos de electricidad y electrónica.
Interpretar hojas de especificaciones.
Circuitos básicos de
APERTURA: El profesor sondea conocimientos sobre el manejo de equipo de cómputo en sesión interrogativa. Informa y expone las ventajas del uso de un simulador de circuitos en relación al costo, tiempo, errores previos, etc. El alumno investiga los procedimientos para la instalación de software en computadora. El alumno investiga el uso de la simbología en diagramas para su uso, y librerías de recambios para conocer en su mayor parte los dispositivos electrónicos discretos. El docente corrige desviaciones en la investigación. DESARROLLO: El profesor plantea circuitos a realizar en el simulador, pidiendo resultados que son conocidos hasta llevar a cabo la simulación. El alumno instala el software de simulación en la computadora: Protel, Or-cad, Tina, etc. cualquiera de ellos. El alumno diseña circuitos y los ejecuta para comprobar su funcionamiento, prueba diferentes
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
Rubrica
EVALUACIÓN DIAGNÓSTICA
Heteroevaluación
Autoevaluación
EVALUACIÓN FORMATIVA
Heteroevaluación

regulación de voltaje. formas de obtener el mismo resultado e imprime sus trabajos. El docente agrega información adicional del software, para la creación del circuito impreso, y su respectivo proceso de xerigrafía para elaborarlo CIERRE: El alumno procede al armado real, basado en los circuitos probados que diseño en computadora, a manera de proyecto, el cual será entregado en circuito impreso.
15. Producto
16. Lista de Cotejo
17. Reporte de resultados
18. Producto terminado
Ejercicios
EVALUACIÓN SUMATIVA
Heteroevaluación
Coevaluación
5. Utiliza dispositivos tiristores como el DIAC TRIAC y SCR, PUT, UJT, amplificadores operacionales y opto acopladores en aplicaciones de manejo y control de potencia.
Atributos de la Competencia:
Manipula software de simulación de circuitos electrónicos.
Utiliza las librerías del software de simulación.
Interpreta diagramas de circuitos eléctricos y electrónicos.
Verificar características y funcionamiento estático de los semiconductores.
Comprueba el funcionamiento estático de los dispositivos electrónicos semiconductores.
Realiza circuitos electrónicos con los dispositivos siguiendo un procedimiento establecido; tomando como base los siguientes ejemplos: temporizadores y osciladores con UJT; generadores de rampa y señal de escalera;
APERTURA:
El profesor forma grupos de investigación para obtener información de circuitos electrónicos específicos, planeando la recolección de la información y diseña las actividades de cada equipo para obtener una visión general de los diferentes tipos.
DESARROLLO:
Con los conocimientos adquiridos en la apertura el profesor propone practicas grupales de desarrollo los cuales son seleccionados por los equipos y los asesora al estar desarrollándolos y promueve:
Responsabilidades individuales.
Igualdad de oportunidades.
Metas de tipo grupal.
Utiliza el software para verificar el diseño y obtener resultados previos. Algunos proyectos pueden ser:
Circuitos temporizadores y osciladores con UJT.
Oscilador PUT.
Generadores de rampa y señal de escalera.
Control de fase con SCR.
Circuitos disparadores con
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
EVALUACIÓN
DIAGNOSTICA
Heteroevaluación
EVALUACIÓN FORMATIVA
Heteroevalaución
Coevaluación
Autoevaluación

circuitos disparadores; control de potencia SCR y PUT; control de sentido de giro de motor;
TRIAC.
Control de fase UJT y SCR.
puente H y control de velocidad TRIAC.
Evalúa, compara y distingue los resultados obtenidos la simulación y del circuito practico.
Evalúa las variables eléctricas en un circuito eléctrico de CA y CD.
Elabora reporte de resultados.
Saberes de la competencia:
Manejo de computadora personal
Conocimientos dispositivos semiconductores de tres y cuatro capas.
Interpreta hojas de especificaciones.
Manipula instrumentos de medición electrónica.
Control de potencia SCR y PUT
Control de motor de corriente directa con puente H.
Control de velocidad de motor de corriente alterna.
Control por medio de DIAC.
CIERRE:
Los alumnos presentan sus prácticas utilizando los circuitos seleccionados, explicando los retos que tuvieron al realizarlo, cómo los solucionaron, y elaborando reportes de resultados.
19.
20.
21.
22.
23.
24.
25. Producto
26. Lista de Cotejo
27. Reporte de resultados
28. Producto terminado
Ejercicios Rubrica
EVALUACIÓN SUMATIVA
Heteroevalaución
Coevaluación
Autoevaluación
.
6. Ejecuta el mantenimiento a sistemas eléctricos y electrónicos empleando
APERTURA:
Con los conocimientos adquiridos
Conocimiento
Cuestionario EVALUACIÓN

procedimientos establecidos.
Atributos de la Competencia:
Aplica técnicas de soldar y desoldar en circuitos electrónicos.
Selecciona herramienta de trabajo tipos de materiales y herramientas.
Ejecuta soldar y desoldar en componentes electrónicos.
Crea circuitos impresos con ayuda de software.
Elabora reporte de resultados.
Aplica las normas de seguridad e higiene en un ambiente laboral:
NOM-001-STPS
NOM-004-STPS
NOM-017-STPS
NOM-100-STPSN
en la competencia anterior el profesor promueve la creación de proyectos de manera grupal.
Los alumnos toman la decisión del proyecto presentando
Investigan de manera electrónica con fundamento en las decisiones tomadas las normas de mantenimiento eléctrico y electrónico.
Realiza la presentación al grupo de la decisión tomada, plan de trabajo e informan de sus metas planificando la recolección de datos.
DESARROLLO:
El profesor mediante una práctica demostrativa demuestra las técnicas de soldar y desoldar.
Muestra la creación de circuitos impresos con la ayuda de software y la manera tradicional
Con el software de simulación prueba el funcionamiento de sus circuitos y comienza la elaboración del circuito impreso con supervisión del maestro.
Realiza la prueba del circuito.
CIERRE:
Los alumnos presentan sus
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
29. Producto
30. Lista de Cotejo
DIAGNOSTICA
Heteroevalaución
Coevaluación
Autoevaluación
EVALUACIÓN FORMATIVA
Heteroevalaución
Coevaluación
Autoevaluación
EVALUACIÓN SUMATIVA
Heteroevalaución

proyectos explicando las técnicas de mantenimiento y diseño mencionando los circuitos seleccionados, presentando los retos que tuvieron al realizarlo, como los solucionaron, y elaborando reportes de resultados.
31. Reporte de resultados
32. Producto terminado
Ejercicios Rubrica
33.
Coevaluación
Autoevaluación

MÓDULO I Realiza mantenimiento a circuitos eléctricos y electrónicos. HRS/SEMESTRE
272
SUBMÓDULO II Realiza mantenimiento a sistemas electrónicos digitales. HRS/SEMESTRE
128
RESULTADO DE
APRENDIZAJE DEL
SUBMÓDULO
Al término del módulo el alumno será capaz de realizar mantenimiento a circuitos
eléctricos y electrónicos.
COMPETENCIAS PROFESIONALES ESTRATEGIAS DIDÁCTICAS PARA
EL LOGRO DE LAS COMPETENCIAS. EVIDENCIAS
ELEMENTOS PARA LA
EVALUACIÓN
1. Analiza y relaciona los diferentes sistemas de numeración utilizados en la lógica digital.
Atributos:
Investiga en medios electrónicos y escritos los sistemas numéricos.
Realiza conversiones de sistemas numéricos.
Conocimientos de lógica.
Saberes de la competencia:
Aritmética digital.
APERTURA:
Promover la integración grupal y presentar el submódulo mencionando el resultado de aprendizaje, duración, contenido, metodología de trabajo, normas de convivencia y formas de evaluación.
Fomentar la aplicación de valores durante el desarrollo del submódulo como: honestidad, trabajo en equipo, respeto, conciencia entre otros.
El alumno investiga los diferentes
Conocimiento
Cuestionario
Resumen
EVALUACIÓN DIAGNÓSTICA
Heteroevalaución
Coevaluación
Autoevaluación
GUÍA DIDÁCTICA DEL SUBMÓDULO II

Sistema binario.
Sistema hexadecimal.
Sistema octal.
sistemas numéricos utilizados en electrónica.
Mediante el método de presentación y discusión se obtienen os principios básicos de estos sistemas.
DESARROLLO:
El maestro presenta la información de los diferentes tipos de sistemas numéricos y conversiones entre ellos.
Coordina la resolución de conversiones entre sistemas.
Promover la integración grupal y realizar un trabajo de investigación referente a sistemas de numeración y códigos.
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
EVALUACIÓN
FORMATIVA
Heteroevalaución
Coevaluación
Autoevaluación
CIERRE:
Realiza trabajo extra clase de resolución de conversiones entre sistemas numéricos.
Promueve la integración final y
realizar la retroalimentación y la
evaluación correspondiente para
34.
35. Producto
36. Lista de Cotejo
37. Reporte de resultados
38. Producto terminado
Ejercicios Rubrica
EVALUACIÓN
SUMATIVA
Heteroevalaución
Coevaluación
Autoevaluación

verificar el logro de las
competencias.
2. Interpreta y analiza las reglas de la lógica booleana aplicadas al campo de la electrónica; analiza circuitos digitales que incluyan compuertas lógicas (NOT, AND, OR, NAND, NOR, OR-EX, NOR-EX) del tipo TTL y MOSFET de acuerdo a las reglas de la lógica booleana.
Atributos de la Competencia:
Conoce y analiza la lógica digital
Obtiene información de circuitos integrados.
Realiza medición de las características de las compuertas lógicas.
Distingue la diferencia
APERTURA:
Promover la integración grupal y la aplicación de una técnica grupal para la recuperación de conocimientos previos relacionados con álgebra booleana y mapas.
Le hace saber al alumno lo que puede lograr hacer al termino de la competencia
Presenta circuitos terminados para que el alumno visualice los productor terminados al final de la competencia
DESARROLLO:
Presenta los teoremas de Morgan.
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
EVALUACIÓN DIAGNÓSTICA
Heteroevalaución
Coevaluación
Autoevaluación
EVALUACIÓN
FORMATIVA
Heteroevalaución
Coevaluación
Autoevaluación

entre circuitos TTL y CMOS.
Construye circuitos de lógica combinacional.
Analiza mapas de karnaugh para el diseño de circuitos lógicos.
Propone y evalúa soluciones a los retos en el diseño de circuitos electrónicos digitales.
Verifica y reflexiona resultados teóricos y prácticos.
Construye circuitos decodificadores, multiplexores y demultiplexores y comprueba su funcionamiento.
Saberes de la competencia:
Tablas de verdad.
Circuitos básicos de las compuertas.
Sistemas numéricos.
Algebra booleana.
Mapas de karnaught.
Promueve la realización y simplificación de circuitos lógicos, a través de expresiones booleanas y métodos de simplificación.
Promueve ejercicios para realizar expresiones booleanas y mapas de Karnaugh.
Demuestra el montaje de circuitos lógicos con los resultados de las operaciones booleanas y mapas de Karnaught.
CIERRE:
Realiza prácticas que relacione y compruebe el funcionamiento de las compuertas lógicas con su respectiva tabla de verdad y diseña un circuito de lógica combinacional.
Promueve la integración final de la competencia con práctica grupal de diseño de proyecto electrónico digital para realizar la retroalimentación y la evaluación correspondiente y verificar el logro de las competencias.
Producto
39. Lista de Cotejo
40. Reporte de resultados
41. Producto terminado
Ejercicios Rubrica
EVALUACIÓN
SUMATIVA
Heteroevalaución
Coevaluación
Autoevaluación

3. Utiliza software de simulación para comprobación previa de funcionamiento de circuitos electrónicos digitales.
Atributos de la Competencia:
Manipula software de simulación de circuitos electrónicos digitales
Utiliza las librerías, tutoriales y ayuda del software
Interpreta diagramas de circuitos electrónicos.
Evalúa y distingue los resultados obtenidos de la simulación
Elabora reportes de resultados
Saberes de la competencia:
Manejo de computadora personal.
Conocimientos de electricidad, electrónica
Interpretar hojas de especificaciones
Circuitos de lógica combinacional.
Sistemas numéricos
APERTURA:
El profesor mediante una práctica demostrativa realizara circuitos básicos en el software de simulación y verificación explicando a los alumnos el funcionamiento del software, tablas de herramientas, etc.
DESARROLLO:
El profesor plantea prácticas y supervisa el desarrollo de estas para que el alumno adquiera habilidades de manipulación del programa.
CIERRE:
El alumno desarrolla los circuitos
de la competencia anterior para
verificar los resultados obtenidos
realiza reporte de resultados e
interpreta los diagramas obtenidos
por el simulador, elaborando
reporte de practicas.
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
42. Producto
43. Lista de Cotejo
44. Reporte de resultados
45. Producto terminado
Ejercicios Rubrica
EVALUACIÓN DIAGNÓSTICA
Heteroevalaución
Coevaluación
Autoevaluación
EVALUACIÓN
FORMATIVA
Heteroevalaución
Coevaluación
Autoevaluación
EVALUACIÓN SUMATIVA
Heteroevalaución
Coevaluación
Autoevaluación
Hoja de especificaciones de circuitos eléctricos.
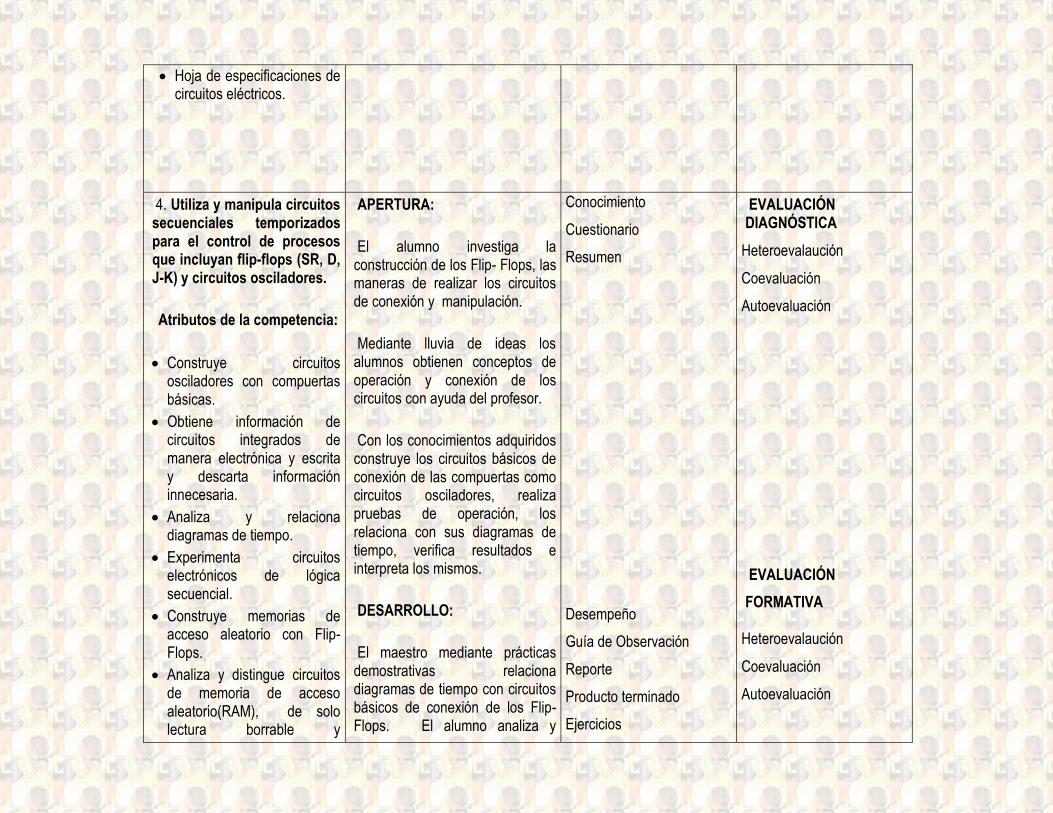
4. Utiliza y manipula circuitos secuenciales temporizados para el control de procesos que incluyan flip-flops (SR, D, J-K) y circuitos osciladores.
Atributos de la competencia:
Construye circuitos osciladores con compuertas básicas.
Obtiene información de circuitos integrados de manera electrónica y escrita y descarta información innecesaria.
Analiza y relaciona diagramas de tiempo.
Experimenta circuitos electrónicos de lógica secuencial.
Construye memorias de acceso aleatorio con Flip- Flops.
Analiza y distingue circuitos de memoria de acceso aleatorio(RAM), de solo lectura borrable y
APERTURA:
El alumno investiga la construcción de los Flip- Flops, las maneras de realizar los circuitos de conexión y manipulación.
Mediante lluvia de ideas los alumnos obtienen conceptos de operación y conexión de los circuitos con ayuda del profesor.
Con los conocimientos adquiridos construye los circuitos básicos de conexión de las compuertas como circuitos osciladores, realiza pruebas de operación, los relaciona con sus diagramas de tiempo, verifica resultados e interpreta los mismos.
DESARROLLO:
El maestro mediante prácticas demostrativas relaciona diagramas de tiempo con circuitos básicos de conexión de los Flip-Flops. El alumno analiza y
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
EVALUACIÓN DIAGNÓSTICA
Heteroevalaución
Coevaluación
Autoevaluación
EVALUACIÓN
FORMATIVA
Heteroevalaución
Coevaluación
Autoevaluación

programable (EPROM) y sus derivadas.
Construye circuitos contadores ascendentes, descendentes si sincronía y sincronizados.
Elabora e interpreta reportes de resultados.
Saberes de la competencia:
Sistemas numéricos orientados a electrónica digital
Activación por flancos
Lógica combinacional
Diagramas de tiempo
Circuitos flip-flop: D, J K, S R y T
Circuitos integrados de memoria
Hojas de características
Circuitos de memoria
Tablas de verdad de Flip-Flops
relaciona estos diagramas para realizar prácticas de circuitos electrónicos de lógica secuencial.
Se presenta los circuitos osciladores explicando los diagramas de tiempo, variaciones, voltajes de salida y de entrada por el profesor, aplicados a circuitos contadores.
El alumno interpreta y verifica estos circuitos obteniendo conclusiones de los circuitos.
CIERRE:
El alumno realiza prácticas individuales y grupales con circuitos secuenciales para demostrar los conocimientos adquiridos estos pueden ser: Circuitos osciladores, contadores ascendentes y descendentes; síncronos o asíncronos de dos o más dígitos, circuito supresor de rebotes, contadores en cascada, encoders con Flip- Flops y valora e interpreta los resultados obtenidos.
46. Producto
47. Lista de Cotejo
48. Reporte de resultados
49. Producto terminado
Ejercicios Rubrica
EVALUACIÓN SUMATIVA
Heteroevalaución
Coevaluación
Autoevaluación

5. Manipula circuitos integrados específicos para la reducción de operaciones lógicas y simplifica los circuitos lógicos.
Atributos:
Obtiene información de circuitos electrónicos para operaciones específicas.
Distingue los circuitos convertidores digital/analógico y analógica/digital.
Analiza circuitos convertidores e identifica aplicaciones.
Utiliza circuitos decodificadores en aplicaciones electrónicas.
Realiza un circuito de aplicación tecnológica utilizando circuitos digitales.
Elabora e interpreta reportes de resultados.
Saberes de la competencia:
Circuitos convertidores.
Circuitos electrónicos para procesos específicos.
Hojas de características.
Manipulación de
APERTURA:
El profesor forma grupos de investigación para obtener información de circuitos electrónicos específicos, planeando la recolección de la información y diseña las actividades de cada equipo para obtener una visión general de los diferentes tipos.
DESARROLLO:
Con los conocimientos adquiridos en la apertura, el profesor propone practicas de desarrollo o proyectos los cuales son seleccionados por los equipos y los asesora al estar desarrollándolos y promueve:
Responsabilidades individuales.
Igualdad de oportunidades.
Metas de tipo grupal.
Algunos proyectos pueden ser:
o Indicadores de nivel.
o Cronómetros electrónicos.
o Indicadores de led.
o Interruptor multidireccional.
o Reloj electrónico.
o Contador de frecuencia.
o Contador de entradas y salidas.
o Control de posición.
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
EVALUACIÓN DIAGNÓSTICA
Heteroevalaución
Coevaluación
Autoevaluación
EVALUACIÓN
FORMATIVA
Heteroevalaución
Coevaluación
Autoevaluación

herramientas de medición.
o Circuito de control de motor de pasos.
CIERRE:
Los alumnos presentan su proyecto utilizando los circuitos seleccionados, explicando los retos que tuvieron al realizarlo, cómo los solucionaron, y elaborando reportes de resultados.
50. Producto
51. Lista de Cotejo
52. Reporte de resultados
53. Producto terminado
Ejercicios Rubrica
EVALUACIÓN SUMATIVA
Heteroevalaución
Coevaluación
Autoevaluación

Noviembre 2010
PPRROOGGRRAAMMAA DDEE EESSTTUUDDIIOO
TTééccnniiccoo eenn MMeeccaattrróónniiccaa
Módulo II
Programa sistemas Mecatrónicos.
RREEFFOORRMMAA IINNTTEEGGRRAALL DDEE LLAA EEDDUUCCAACCIIÓÓNN MMEEDDIIAA SSUUPPEERRIIOORR

La Mecatrónica es la combinación cinegética de las ingenierías mecánica, electrónica, informática y de control. Ésta última
con frecuencia se omite, pues es considerada dentro de alguna de las dos anteriores; sin embargo, es importante
destacarla por el importante papel que el control juega en la mecatrónica. La sinergia consiste en que la integración de las
partes.
La Mecatrónica está centrada en mecanismos, componentes electrónicos, neumáticos, hidráulicos y módulos de
computación los cuales combinados hacen posible la generación de sistemas más flexibles, versátiles, económicos, fiables
y simples.
En la actualidad las empresas, industriales y de servicios han adoptado las nuevas tecnologías, para facilitar, mejorar y
optimizar la producción. En el presente modulo el Técnico en Mecatrónica desarrolla competencias que le permiten
manipular un entorno programable de producción automática, también, proporciona al técnico la habilidad para enfrentar
las necesidades de la pequeña, mediana o gran empresa, ejecutando acciones directas de acuerdo a las necesidades
propias del tamaño de cada una. Aplicando la neumática, hidráulica, electrohidráulica, electroneumática con circuitos de
control como lo son PLC´s, El uso de programas computacionales, y la programación de microcontroladores para
controlar sistemas mecatrónicos.
DESCRIPCIÓN DEL MÓDULO II

Es un texto breve que describe:
Propósitos específicos de aprendizaje de cada submódulo
NOMBRE DEL SUB
MÓDULO
PROPÓSITOS ESPECÍFICOS DE APRENDIZAJE
1.- Programa Sistemas
Mecatrónicos.
El alumno emplea los lenguajes de programación para
la automatización de procesos de control utilizados en sistemas
mecatrónicos.
2.- Automatiza Procesos
Electro Neumáticos y Electro
Hidráulicos. Por medio de
PLC.
Con aplicaciones eléctricas, neumáticas e hidráulicas
el alumno desarrollara sistemas automatizados que aplican en
sistemas mecatrónicos e instrumentos de control como lo es el
PLC
.
Apoyarse en el documento: “Didáctica y evaluación del Componente de formación Profesional” y
“Recomendaciones Metodológicas para la Elaboración de Programas”
PROPÓSITOS ESPECÍFICOS DE APRENDIZAJE DEL MÓDULO

Inicialmente, el docente realiza un examen diagnóstico para identificar los alcances y límitaciones de acuerdo a las habilidades identificadas por alumno para que tenga visión de lo que puede llegar a hacer el estudiante al finalizar el curso. El alumno debe realizar una investigación acerca de la gama de microcontroladores para que adquiera la habilidad de buscar el microcontrolador que se ajuste a las necesidades del sistema que desea automatizar. Posteriormente, el alumno analiza los mneumónicos del microcontrolador elegido y lo programa para ejecutar tareas básicas que satisfagan las necesidades del sistema de control. El alumno diseña la interfaz electrónica para operar su sistema de control empleando los conocimientos adquiridos en electrónica digita y analógica. El alumno implementa el microcontrolador en el sistema de control y elabora un interfaz gráfica de usuario para leer las entradas y mostrar el resultado. El docente muestra al alumno cómo controlar el flujo de información de un programa mediante ejemplos donde emplee bifurcaciones y bucles. El alumno aplica la programación orientada a objetos para brindar una interfaz gráfica de usuario más amigable y proveer mayor seguridad al sistema de control. El alumno emplea los puertos de la computadora para establecer conexión en entre el sistema mecatrónico y la computadora
MÉTODOS Y ACTIVIDADES PARA ALCANZAR LOS PROPÓSITOS DE APRENDIZAJE DEL
MÓDULO
El curso está dirigido al desarrollo de software aplicado a la automatización de sistemas de control, y por tanto, el uso de
las tecnologías de la información y comunicación están implicitas, por el hecho de que el curso consiste en desarrollar
herramientas de software y hardware que permitan admnistrar la información, coordinar procesos, mantener comunicación
con el usuario y agilizar procedimientos.
El alumno debe emplear la computadora para escribir las sentencias de código en el lenguaje de programación elegido.
No obstante, debe emplear el software de la computadora tales como aplicaciones de desarrollo, sistema operativo,
herramientas administrativas del sistema, software de comunicación, etc.
En este curso se debe hacer uso del Internet para promover la investigación por parte de los alumnos y de este modo
lograr alcanzar los objetivos adecuadamente. Además el uso del correo electrónico es de vital importancia para mantener
estrecha comunicación con su grupo de trabajo y el docente.
DESARROLLO DIDÁCTICO DE LAS TECNOLOGÍAS DE LA INFORMACIÓN Y LA COMUNICACIÓN
EN EL MÓDULO

El curso abarca competencias que en particular, requiere de conocimientos previos que el alumno debe poseer al tomar el curso.
Lógica matemática es de vital importancia para lograr un aprendizaje significativo el cuál se puede lograr mediante estrategias
didácticas que encaminen a desarrollar esta habilidad.
El dominio del idioma inglés facilita al alumno a comprender con claridad las sentencias de código empleadas durante el curso.
Por otra parte, gran parte de los manuales y herramientas disponibles para la automatización de procesos de control dirigidos a
sistemas mecatrónicos, se encuentran el idioma inglés.
El curso abarca relevantemente el uso de circuitos eléctricos y electrónicos, los cuales forman parte del sistema mecatrónico que
el alumno debe manipular.
Por otra parte, el alumno realiza investigaciones que lo forzan a desarrollar la habilidad de investigar y comprender una lectura. El
alumno debe hacer uso de las técnicas de lectura y redacción adquiridas durante su formación académica para formular trabajos
de acuerdo a las necesidades.
RECOMENDACIONES ACADÉMICAS PARA TRABAJO INTERDISCIPLINARIO EN EL LOGRO DE
LAS COMPETENCIAS GENÉRICAS

SUBMÓDULO COMPETENCIAS GENÉRICAS A DESARROLLARSE.
I.-Programa Sistemas Mecatrónicos. - Se conoce y valora a sí mismo y aborda problemas y
retos teniendo en cuenta los objetivos que persigue.
- Escucha, interpreta y emite mensajes pertinentes en
distintos contextos mediante la utilización de medios,
códigos y herramientas apropiados.
- Desarrolla innovaciones y propone soluciones a problemas a partir de métodos establecidos.
- Sustenta una postura personal sobre temas de interés y
relevancia general, considerando otros puntos de vista
de manera crítica y reflexiva.
- Aprende por iniciativa e interés propio a lo largo de la
vida.
- Participa y colabora de manera efectiva en equipos
diversos.
II.-Automatiza Procesos Electro Neumáticos y
Electro Hidráulicos. Por medio de PLC.
- Se conoce y valora a sí mismo y aborda problemas y
retos teniendo en cuenta los objetivos que persigue.
- Escucha, interpreta y emite mensajes pertinentes en
distintos contextos mediante la utilización de medios,
códigos y herramientas apropiados.
- Desarrolla innovaciones y propone soluciones a
COMPETENCIAS GENÉRICAS RELACIONADAS
problemas a partir de métodos establecidos.
- Sustenta una postura personal sobre temas de interés y
relevancia general, considerando otros puntos de vista
de manera crítica y reflexiva.
- Aprende por iniciativa e interés propio a lo largo de la
vida.
- Participa y colabora de manera efectiva en equipos
diversos.
SUBMÓDULO COMPETENCIAS DISCIPLINARES A DESARROLLARSE.
Programa Sistemas Mecatrónicos. Cuantifica, representa y contrasta experimental o matemáticamente
magnitudes del espacio que lo rodea.
Interpreta tablas, gráficas, mapas, diagramas y textos con símbolos
matemáticos y científicos.
Explica el funcionamiento de máquinas de uso común a partir de
nociones científicas.
Contrasta los resultados obtenidos en una investigación o
experimento con hipótesis previas y comunica sus conclusiones.
Aplica normas de seguridad en el manejo de sustancias, instrumentos
y equipo en la realización de actividades de su vida cotidiana.
Automatiza Procesos Electro Neumáticos y
Electro Hidráulicos. Por medio de PLC.
Cuantifica, representa y contrasta experimental o matemáticamente
magnitudes del espacio que lo rodea.
Interpreta tablas, gráficas, mapas, diagramas y textos con símbolos
matemáticos y científicos.
Explica el funcionamiento de máquinas de uso común a partir de
nociones científicas.
COMPETENCIAS DISCIPLINARES RELACIONADAS

Contrasta los resultados obtenidos en una investigación o
experimento con hipótesis previas y comunica sus conclusiones.
Aplica normas de seguridad en el manejo de sustancias, instrumentos
y equipo en la realización de actividades de su vida cotidiana.
MÓDULO II Programa sistemas mecatrónicos HRS/SEMESTRE
272
SUBMÓDULO I Programa sistemas HRS/SEMESTRE
128
RESULTADO DE
APRENDIZAJE DEL
SUBMÓDULO
El alumno aplica los lenguajes de programación para automatizar sistemas mecatrónicos mediante microcontroladores
COMPETENCIAS PROFESIONALES ESTRATEGIAS DIDÁCTICAS PARA EL
LOGRO DE LAS COMPETENCIAS. EVIDENCIAS
ELEMENTOS PARA LA
EVALUACIÓN
1. Programa
microcontroladores
ATRIBUTOS DE LA COMPETENCIA
Conocer las especificaciones
técnicas del microcontrolador
Apertura:
El docente:
• Recupera conocimientos y
experiencia previos a través de una
evaluación diagnóstica.
54.
Cuestionario
Autoevaluación
• Promueve la integración grupal y
la comunicación con el fin de identificar las
espectativas
Cuestionario
Autoevaluación
GUÍA DIDÁCTICA DEL SUBMÓDULO I

Configurar las entradas y salidas
del microcontrolador
Manipular la memoria interna
Manipular los puertos
Resolver un problema mediante
microcontroladores
Ensamblar el programa y simular
los resultados esperados.
Descargar el código objeto
mediante un programador e integrarlo
en el circuito electrónico
SABERES DE LA COMPETENCIA
Electrónica Digital
Electrónica Analógica
Lógica computacional
Tecnologías de la información y
comunicación
• Presenta el módulo mencionando
nombre, justificación, competencias de
ingreso, duración y resultado de
aprendizaje.
Cuestionario Autoevaluación
• Presenta el submódulo
mencionando el resultado de aprendizaje,
duración, contenido, metodología de
trabajo,
Cuestionario Autoevaluación
Desarrollo:
Promueve una investigación bibliográfica de
los fundamentos de microcontroladores,
características y condiciones de operación.
Guía de observación Heteroevaluación:
Selecciona un microcontrolador para
realizar un circuito de control básico.
Cuestionario Autoevaluación
Promueve una práctica grupal para realizar
la conexión del microcontrolador, medición
de variables electrónicas (corriente, voltaje y
frecuencia del oscilador).
Reporte de resultados Heteroevaluación
El alumno realiza un programa simple de
operación de lógica combinacional y
programa puertos de entrada y salida.
Reporte de resultados Heteroevaluación

Mediante lluvia de ideas discuten los
resultados y verifican el control del
procesador.
Reporte de resultados Heteroeveluación
Cierre:
Mediante una práctica demostrativa, el
Profesor manipula el hardware para grabar
los microcontroladores con los programas
seleccionados y resuelve las inquietudes de
los alumnos
Lista de cotejo
Autoevaluación
El alumno verifica su programa de control,
graba el programa en el microcontrolador,
verifica los datos y las operaciones en los
puertos y realiza reporte de actividades.
Reporte de resultados Heteroevaluación
El alumno presenta un proyecto de control
con variables de entrada y salida operado
por un microcontrolador.
Reporte de resultados Heteroeveluación
El alumno desarrolla el programa secuencial
genera el código en lenguaje ensamblador o
lenguaje de alto nivel lo codifica, lo simula y
lo transfiere al microcontrolador
Se realizan pruebas de funcionamiento si se
requiere de dispositivos electrónicos para el
funcionamiento se agregan al sistema
Lista de cotejo Heteroevaluación
Programa un lenguaje de alto nivel
para la manipulación de sistemas de
control.
ATRIBUTOS DE LA COMPETENCIA
Conocer y manipular el
compilador
Manipular la consola para le
entrada y salida de datos
Diseñar interfaces gráficas de
acuerdo a los requerimientos del
usuario
Emplear estructuras de control
Implementar y manipular clases
dentro de un proyecto
Manipular los puertos de la
computadora
Apertura:
El alumno desarrolla una investigación
documental de la parte introductoria Java
que incluya:
- Definición
- Antecedentes históricos
- Plataforma
- Características del lenguaje
- Ventajas y desventajas del
lenguaje
Cuestionario Coevaluación
El alumno elabora algoritmos para
comprender la lógica computacional
Resumen Heteroevaluación
Desarrollo:
Los alumnos elaboran prácticas básicas
para interactuar con el lenguaje de
programación, tales como:
Guía de observación Heteroevaluación

Almacenar la información
obtenida por la interfaz gráfica y el
sistema de control en una base de
datos
SABERES DE LA COMPETENCIA
Lenguajes de programación
Sistemas numéricos
Bases de datos
Registros
- Operaciones algebraicas de
números
- Cálculo de porcentajes y
promedios basado en
condiciones
- Conversión de tipos de dato
- Manipulación de cadenas
- Rutinas repetitivas
- Gráfica de ecuaciones lineales y
no lineales
- Tratamiento de errores en tiempo
de ejecución
- Lectura de archivos
- Transmisión y repeción de pulsos
electrónicos mediante los puertos
de la computadora
Utiliza el lenguaje de programación de alto
nivel para crear interfaz con dispositivos
electrónicos o eléctricos abarcando los
siguientes puntos:
• Ventanas de operación
• Configuración de los puertos
• Programación orientada a objetos
• Algoritmos de programación
• Interfaz con el usuario
• Control de eventos
Guía de observación Autoevaluación

El Profesor mediante una práctica
demostrativa, explica la manera de
conectar y de realizar los programas para
sincronizar los sistemas. Simula la prueba
del funcionamiento de su sistema y
comienza la interfaz con supervisión del
maestro. Posteriormente, el alumno diseña
una base de datos de acuerdo a sus
sistema de control y los resultados del
sistema son almacenados en la misma
Una vez hecho lo anterior, el sistema
evalúa los resultados, los gráfica y los
resguarda en la base de datos con previas
validaciones. Finalmente, realiza la prueba
del sistema.
Guía de observación Autoevaluación
Cierre:
Se realiza la presentación de proyectos
explicando:
• Objetivo del proyecto.
• Descripción de funcionamiento.
• Herramientas de diseño y
programación utilizadas.
• Materiales y equipo. utilizados.
• Resultados obtenidos.
• Entrega de reporte escrito y de
manera electrónica
Lista de cotejo Heteroevaluación
MÓDULO II Programa sistemas mecatrónicos HRS/SEMESTRE
272
SUBMÓDULO II
Automatiza procesos electroneumáticos y electrohidráulicos por medio de
PLC.
HRS/SEMESTRE
144
RESULTADO DE
APRENDIZAJE DEL
SUBMÓDULO
El alumno maneja y programa sistemas mecatrónicos que emplean sensores, actuadores eléctricos,
electroneumáticos, electrohidráulicos, microcontrolados y controlados por PLC utilizados en la industria.
COMPETENCIAS PROFESIONALES ESTRATEGIAS DIDÁCTICAS PARA
EL LOGRO DE LAS COMPETENCIAS. EVIDENCIAS
ELEMENTOS PARA LA
EVALUACIÓN
1. Aplicar PLC como medio
de control, para la
automatización de un
proceso.
Apertura:
El docente promueve la
integración grupal y presentando
el submódulo, mencionando el
resultado de aprendizaje,
duración, contenido, metodología
de trabajo, normas de convivencia
Conocimiento
Cuestionario
Resumen
Diagnóstica:
Heteroevalaución
Coevaluación
GUÍA DIDÁCTICA DEL SUBMÓDULO II
ATRIBUTOS DE LA
COMPETENCIA:
Manipulación de
relevadores como
instrumentos de
control
Programa
Controladores
Lógicos.
Verifica las
condiciones del
controlador de
acuerdo con su
información técnica.
Realiza la conexión
del controlador con los
elementos del sistema
a controlar de acuerdo
a especificaciones.
Elabora el programa
de control de acuerdo
a especificaciones.
y formas de evaluación.
Fomentar la aplicación de valores
durante el desarrollo del
submódulo como: honestidad,
trabajo en equipo, respeto,
conciencia entre otros.
El docente mediante una lluvia de
ideas, induce al grupo a
determinar el concepto de
automatización y las formas
posibles para automatizar un
proceso.
El alumno elabora una línea del
tiempo en la que muestre la
evolución de la automatización y
realiza un ensayo sobre el tema.
El alumno investiga diagramas
secuenciales, condiciones y
características para programar
estados en el PLC.
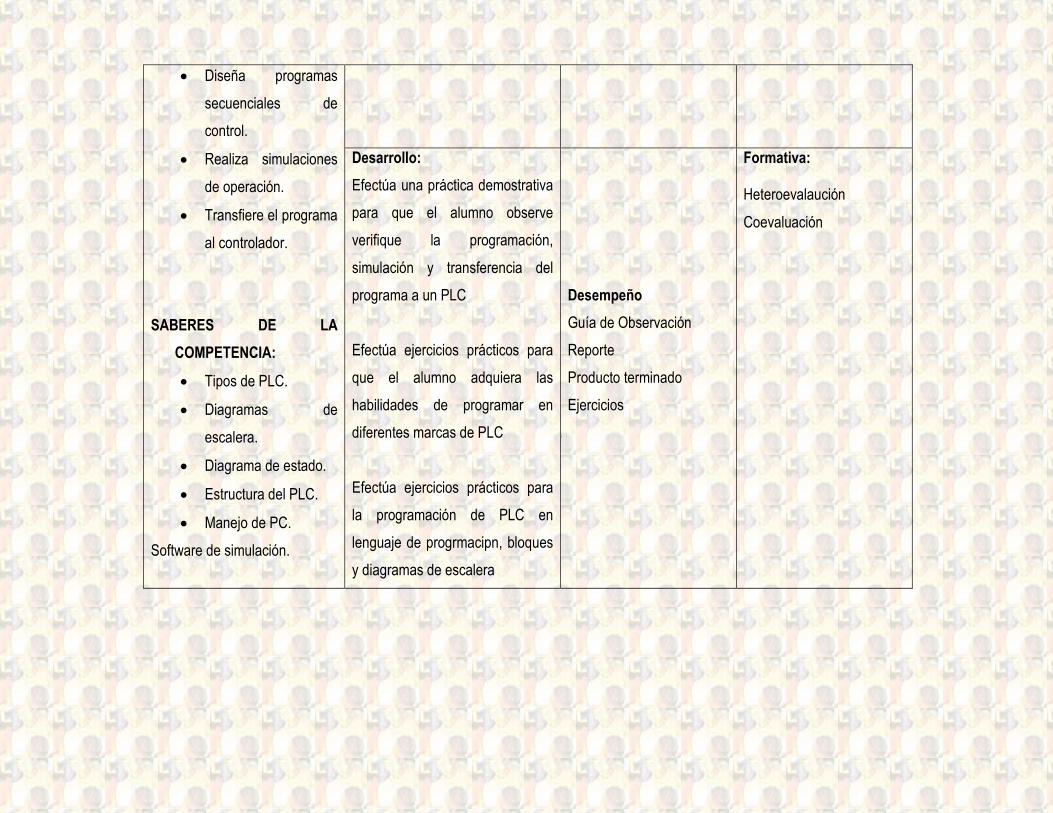
Diseña programas
secuenciales de
control.
Realiza simulaciones
de operación.
Transfiere el programa
al controlador.
SABERES DE LA
COMPETENCIA:
Tipos de PLC.
Diagramas de
escalera.
Diagrama de estado.
Estructura del PLC.
Manejo de PC.
Software de simulación.
Desarrollo:
Efectúa una práctica demostrativa
para que el alumno observe
verifique la programación,
simulación y transferencia del
programa a un PLC
Efectúa ejercicios prácticos para
que el alumno adquiera las
habilidades de programar en
diferentes marcas de PLC
Efectúa ejercicios prácticos para
la programación de PLC en
lenguaje de progrmacipn, bloques
y diagramas de escalera
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
55.
Formativa:
Heteroevalaución
Coevaluación

Cierre:
Prepara y aplica la practica
integradora para que el alumno
con las habilidades adquiridas
realice una practica con todos los
elementos de un PLC
Realiza actividades de
retroalimentación y evaluaciones
correspondientes para verificar el
aprendizaje y le hace ver al
alumno los logros obtenidos m
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
Sumativa
Heteroevalaución
Coevaluación
Autoevaluación
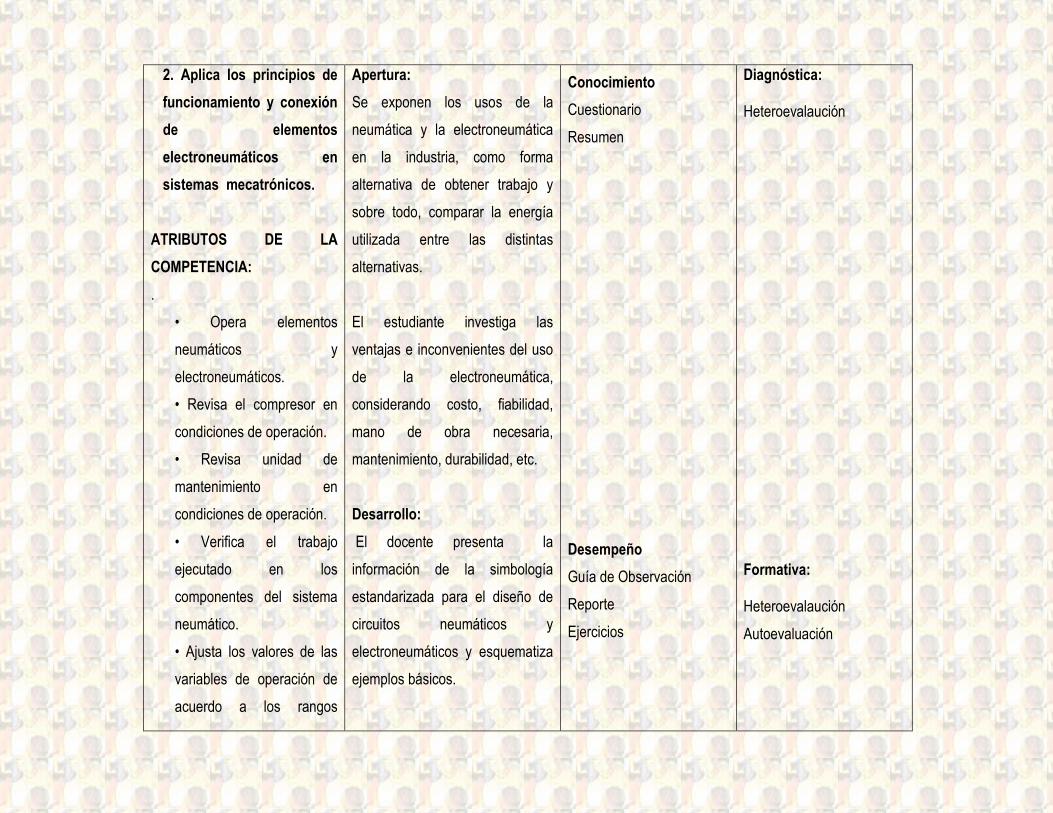
2. Aplica los principios de
funcionamiento y conexión
de elementos
electroneumáticos en
sistemas mecatrónicos.
ATRIBUTOS DE LA
COMPETENCIA:
.
• Opera elementos
neumáticos y
electroneumáticos.
• Revisa el compresor en
condiciones de operación.
• Revisa unidad de
mantenimiento en
condiciones de operación.
• Verifica el trabajo
ejecutado en los
componentes del sistema
neumático.
• Ajusta los valores de las
variables de operación de
acuerdo a los rangos
Apertura:
Se exponen los usos de la
neumática y la electroneumática
en la industria, como forma
alternativa de obtener trabajo y
sobre todo, comparar la energía
utilizada entre las distintas
alternativas.
El estudiante investiga las
ventajas e inconvenientes del uso
de la electroneumática,
considerando costo, fiabilidad,
mano de obra necesaria,
mantenimiento, durabilidad, etc.
Desarrollo:
El docente presenta la
información de la simbología
estandarizada para el diseño de
circuitos neumáticos y
electroneumáticos y esquematiza
ejemplos básicos.
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Ejercicios
Diagnóstica:
Heteroevalaución
Formativa:
Heteroevalaución
Autoevaluación

establecidos.
• Aplica los lineamientos de
seguridad e higiene.
• Utiliza software de
simulación para
comprobación previa del
funcionamiento de circuitos
neumáticos y
electroneumáticos.
Saberes de la competencia :
• Fundamentos físicos.
• Preparación del aire
comprimido.
• Actuadores neumáticos.
• Válvulas neumáticas y
electroneumáticas.
El alumno relaciona la simbología
con el elemento en el área de
prácticas.
El docente muestra la utilidad de
un simulador de computadora
para el diseño de circuitos, para
así observar su funcionamiento
antes de llevarlo a cabo.
El alumno experimenta si
funcionan los circuitos que diseñó
en el simulador, corrigiéndolos en
su momento.
El docente plantea problemas
reales en orden de dificultad
ascendente, para su resolución en
base a lo mostrado, utilizando
simbología y dibujos de
dispositivos básicos y accesorios
para el logro de lo requerido.
El alumno realiza la conexión de

los circuitos en el área de
prácticas.
Cierre:
Prepara y aplica la practica
integradora para la
retroalimentación de
conocimientos sobre neumática y
electroneumática
Propuesta de aplicación
electroneumática en el ámbito
cotidiano, a manera de proyecto,
usando sistemas de control por
PLC o por contactos.
56. Producto
57. Lista de Cotejo
58. Reporte de resultados
59. Producto terminado
Ejercicios Rubrica
Sumativa:
Heteroevalaución
Coevaluación
Autoevaluación

3. Aplica los principios de
funcionamiento y conexión
de elementos
electrohidráulicos en
sistemas mecatrónicos.
ATRIBUTOS DE LA
COMPETENCIA:
• Opera elementos
hidráulicos y electrohidráulicos
• Revisa la bomba en
condiciones de
operación.
• Verifica el trabajo
ejecutado en los
componentes del sistema
electrohidráulico.
• Ajusta los valores de las
variables de operación de
acuerdo a los rangos
establecidos.
• Aplicar los lineamientos de
seguridad e higiene.
• Utilizar software de
Apertura:
Se exponen los usos de la
hidráulica y electrohidráulica en la
industria como forma alternativa
de obtener trabajo.
Coordina actividades escolares en
donde el alumno visualice lo que
puede llegar a logra al manipular
sistemas hidráulicos y
electrohidráulicos.
El estudiante Investiga las
ventajas e inconvenientes del uso
de la hidráulica y electrohidráulica,
considerando, costo, fiabilidad,
mano de obra necesaria,
mantenimiento, durabilidad, etc.
Desarrollo:
El docente presenta la
información de la simbología
estandarizada para el diseño de
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Ejercicios
Diagnóstica:
Heteroevalaución
Formativa:
Heteroevalaución
Coevaluación

simulación para
comprobación previa de
funcionamiento de circuitos
hidráulicos y
electrohidráulicos.
SABERES DE LA
COMPETENCIA:
• Fundamentos físicos.
• Actuadores hidráulicos.
• Válvulas hidráulicas y
electrohidráulicas.
circuitos hidráulicos y
electrohidráulicos y esquematiza
ejemplos básicos.
El alumno relaciona la simbología
con el elemento en el área de
prácticas.
El docente muestra la utilidad de
un simulador de computadora
para el diseño de circuitos, para
así observar su funcionamiento
antes de llevarlo a cabo.
El alumno experimenta si
funcionan los circuitos que diseñó
en el simulador, corrigiéndolos en
su momento.
El docente plantea problemas
reales en orden de dificultad
ascendente, para su resolución en
base a lo mostrado, utilizando
simbología y dibujos de
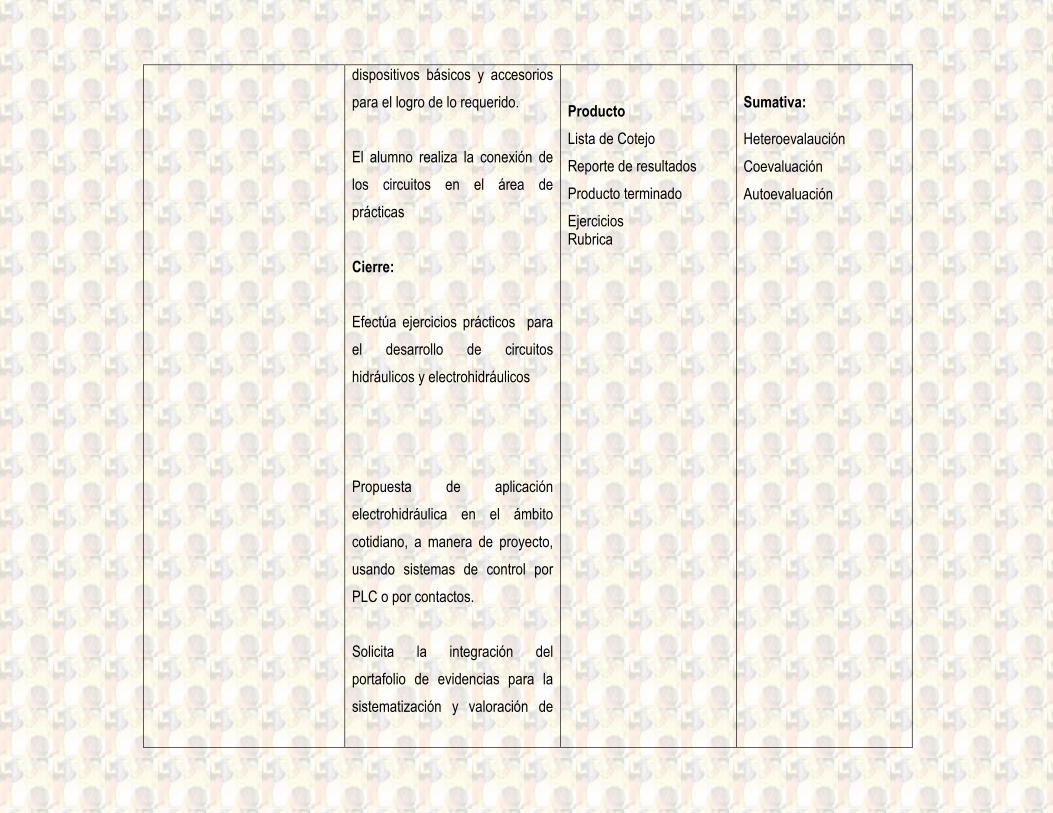
dispositivos básicos y accesorios
para el logro de lo requerido.
El alumno realiza la conexión de
los circuitos en el área de
prácticas
Cierre:
Efectúa ejercicios prácticos para
el desarrollo de circuitos
hidráulicos y electrohidráulicos
Propuesta de aplicación
electrohidráulica en el ámbito
cotidiano, a manera de proyecto,
usando sistemas de control por
PLC o por contactos.
Solicita la integración del
portafolio de evidencias para la
sistematización y valoración de
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
Sumativa:
Heteroevalaución
Coevaluación
Autoevaluación

las evidencias de desempeño,
producto y conocimiento del
contenido

4. Aplica los principios de
funcionamiento y conexión
de los motores de CC y CA
en sistemas mecatrónicos.
ATRIBUTOS DE LA
COMPETENCIA:
• Opera motores eléctricos.
• Verifica las condiciones de
operación de acuerdo a
especificaciones.
• Verifica condiciones de
aislamiento.
• Verifica sistemas de
protección.
• Verifica condiciones de
arranque.
• Verifica sistemas de paro
de emergencia.
• Realiza conexiones de
acuerdo a
especificaciones.
• Opera sistemas de
control de velocidad.
Apertura:
Aplica un diagnostico en forma
individual o grupal para identificar a
los estudiantes sobre el dominio
que trae acerca del contenido de
los motores electricos
El Profesor propone diálogos
simultáneos para retroalimentar la
información acerca de los
diferentes tipos de motores
eléctricos.
El alumno investiga el tipo de
motores que existen en el mercado
y sus aplicaciones.
Desarrollo:
Cuando se tiene el nombre de los
motores más usados, el Profesor
divide entre los equipos
colaborativos, los nombres de
dichos motores con el fin de que
investiguen sus especificaciones
como: Voltajes de operación, RPM
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
Diagnóstica:
Heteroevalaución
Coevaluación
Autoevaluación
Formativa:
Heteroevalaución
Coevaluación
Autoevaluación

SABERES DE LA
COMPETENCIA:
• Hojas de proceso.
•Instrumentos de medición.
• Tipos de motores.
• Elementos de protección.
• Controles de velocidad (el
que aplique).
máximas y mínimas, torque
relativo, fases, no. de polos,
potencia, etc.
El alumno expone su investigación.
El docente plantea problemas
reales como: ¿En qué utilizar cada
motor?; ¿Qué motor usar en un
ventilador?; ¿Qué motor usar para
abrir una compuerta? Etc.
En la medida de lo posible
conectar éstos motores en el área
de prácticas y comprobar sus
características.
El docente hace una reflexión
acerca del porqué de la protección
eléctrica en los motores.
El docente usando la técnica
demostrativa conecta un motor a
un variador de velocidad y realiza
diferentes rutinas para observar el

cambio de velocidad, expone el
funcionamiento teórico y pide un
ensayo sobre el tema.
El docente propone diferentes
problemas que son resueltos por
medio de un circuito de control
realizado con PLC.
Cierre:
Prepara y aplica la practica
integradora para quew el alumno
retroalimente los conocimientos
adquiridos de motores de corriente
alterna y directa.
El alumno aplica lo aprendido en el
área de prácticas al hacer un
control por PLC de un motor, y
presentarlo como exposición.
60. Producto
61. Lista de Cotejo
62. Reporte de resultados
63. Producto terminado
Ejercicios Rubrica
Sumativa Autoevaluación

Noviembre 2010
PPRROOGGRRAAMMAA DDEE EESSTTUUDDIIOO
TTééccnniiccoo eenn MMeeccaattrróónniiccaa
Módulo III
Elabora piezas mecánicas con torno y fresadora convencional y de control numérico.
RREEFFOORRMMAA IINNTTEEGGRRAALL DDEE LLAA EEDDUUCCAACCIIÓÓNN MMEEDDIIAA SSUUPPEERRIIOORR

El módulo tres, está orientado a que el alumno adquiera las competencias necesarias para operar maquinas herramientas
que se utilizan en la fabricación de piezas mecánicas que son necesarias en sistemas mecatrónicos, mecánicos, metalurgia,
industria del plástico, etc.
En este módulo el alumno interpreta planos mecánicos de piezas con los cuales puede comprobar su calidad de fabricación
iniciar la fabricación en un torno o fresa convencional de planos que se le proporcionen y manipular los instrumentos de
medición necesarios para verificar las piezas fabricadas. También aprenderá a operar maquinas automatizadas de
fabricación de piezas mecánicas como son los centros de maquinado de control numérico y el torno de control numérico
específicamente.
Las competencias adquiridas en este modulo lo preparan para operar y verificar el funcionamiento de estas maquinas así
como a utilizar las herramientas adecuadas para la fabricación de piezas mecánicas considerando la dureza de los
materiales con los cuales fabricara.
Para concluir, el presente módulo pretende que el estudiante integre y aplique las habilidades y destrezas adquiridas y
opere los centros de maquinado con gran destreza para poderse integrar al sector laboral de su región.
DESCRIPCIÓN DEL MÓDULO III

NOMBRE DEL SUB
MÓDULO
PROPÓSITOS ESPECÍFICOS DE APRENDIZAJE
1.- Elabora piezas
mecánicas con torno y
fresadora convencionales.
El alumno aprenderá a manipular las maquinas
herramientas para fabricar piezas mecánicas que se utilizan en
procesos de manufactura de sistemas mecatrónicos. Así como
efectuar reparaciones de mecanismos fabricando las piezas
dañadas
2.- Elabora piezas
mecánicas con centros de
maquinado de control
numérico.
Realizara piezas mecánicas con maquinas de control
numérico. Las cuales son utilizadas en procesos mecatrónicos.
.
PROPÓSITOS ESPECÍFICOS DE APRENDIZAJE DEL MÓDULO

En el modulo tres el alumno operara las maquinas herramientas para la fabricación de piezas mecánicas es importante que el
alumno tenga una actitud responsable y tolerante y de respeto ya que las maquinas herramientas pueden ser un peligro si no se
respetan las normas de seguridad correspondientes. Para esto se aplica un diagnostico de forma individual y grupal para
identificar a los estudiantes sobre los conocimientos de normas de seguridad y de maquinas herramientas. Se identifican las
expectativas de los estudiantes acerca de lo que esperan aprender en este modulo de fabricación de piezas mecánicas. Se
coordinan actividades escolares donde el alumno visualice lo que puede llegar a lograr al final de la competencia. Se presentaran
varias prácticas demostrativas para que el alumno contemple las normas de seguridad y la operación de los diferentes tipos de
maquinas herramientas e instrumentos de medición mecánicos. Se efectuaran ejercicios prácticos de la manipulación de las
maquinas herramientas y de control numérico.
Se programara la elaboración de proyectos donde el alumno realizara las actividades de retroalimentación y evaluación
correspondientes para verificar el resultado de aprendizaje y hacerle ver al alumno los resultados obtenidos. Se verificaran los
productos terminados con los instrumentos de medición mecánica y se solicitara la integración del portafolio de evidencias.
MÉTODOS Y ACTIVIDADES PARA ALCANZAR LOS PROPÓSITOS DE APRENDIZAJE DEL
MÓDULO

Para la fabricación de piezas mecánicas existen muchos tipos de software de simulación y desarrollo de maquinas herramientas comunes, de control numérico e instrumentos de medición. Las tecnologías de la información se utilizaran para:
Realiza la búsqueda de la información en la internet
Utiliza simuladores de control numérico para torno y fresa
Utiliza software de programación para códigos de control numérico
Calculo de velocidades para los diferentes tipos de herramientas de corte
Investiga los tipos de materiales para la fabricación de piezas mecánicas
Investiga normas de seguridad e higiene para maquinas de control numérico
DESARROLLO DIDÁCTICO DE LAS TECNOLOGÍAS DE LA INFORMACIÓN Y LA COMUNICACIÓN
EN EL MÓDULO
El curso abarca competencias que en particular, requiere de conocimientos previos que el alumno debe poseer al tomar el curso.
Lógica matemática es de vital importancia para lograr un aprendizaje significativo el cuál se puede lograr mediante estrategias
didácticas que encaminen a desarrollar esta habilidad.
El dominio del idioma inglés facilita al alumno a comprender con claridad las características de las maquinas herramientas para
fabricar piezas mecánicas y lo motiva a aprender con iniciativa propia el interés por el software de simulación durante el curso lo
motiva superarse día con día . Por otra parte, gran parte de los manuales y herramientas disponibles para la automatización de
procesos de control dirigidos a sistemas mecatrónicos, se encuentran el idioma inglés.
El curso abarca relevantemente el uso de coordenadas en el espacio y expresa el funcionamiento de maquinas herramientas e
interpretara planos y diagramas, los cuales forman parte del sistema mecatrónico que el alumno debe manipular y creara
innovaciones que lo motivaran a superarse y lograr sus metas personales.
Por otra parte, el alumno realiza investigaciones que lo forzan a desarrollar la habilidad de investigar y comprender una lectura. El
alumno debe hacer uso de las técnicas de lectura y redacción adquiridas durante su formación académica para formular trabajos
de acuerdo a las necesidades.
RECOMENDACIONES ACADÉMICAS PARA TRABAJO INTERDISCIPLINARIO EN EL LOGRO DE
LAS COMPETENCIAS GENÉRICAS

SUBMÓDULO COMPETENCIAS GENÉRICAS A DESARROLLARSE.
Elabora piezas mecánicas con torno y
fresadora convencionales.
- Se conoce y valora a sí mismo y aborda problemas y
retos teniendo en cuenta los objetivos que persigue.
- Escucha, interpreta y emite mensajes pertinentes en
distintos contextos mediante la utilización de medios,
códigos y herramientas apropiados.
- Desarrolla innovaciones y propone soluciones a problemas a partir de métodos establecidos.
- Sustenta una postura personal sobre temas de interés y
relevancia general, considerando otros puntos de vista
de manera crítica y reflexiva.
- Aprende por iniciativa e interés propio a lo largo de la
vida.
- Participa y colabora de manera efectiva en equipos
diversos.
COMPETENCIAS GENÉRICAS RELACIONADAS
Elabora piezas mecánicas con centros de
maquinado y de control numérico.
- Se conoce y valora a sí mismo y aborda problemas y
retos teniendo en cuenta los objetivos que persigue.
- Escucha, interpreta y emite mensajes pertinentes en
distintos contextos mediante la utilización de medios,
códigos y herramientas apropiados.
- Desarrolla innovaciones y propone soluciones a problemas a partir de métodos establecidos.
- Sustenta una postura personal sobre temas de interés y
relevancia general, considerando otros puntos de vista
de manera crítica y reflexiva.
- Aprende por iniciativa e interés propio a lo largo de la
vida.
- Participa y colabora de manera efectiva en equipos
diversos.
SUBMÓDULO COMPETENCIAS DISCIPLINARES A DESARROLLARSE.
Elabora piezas mecánicas con torno y
fresadora convencionales.
Cuantifica, representa y contrasta experimental o matemáticamente
magnitudes del espacio que lo rodea.
Interpreta tablas, gráficas, mapas, diagramas y textos con símbolos
matemáticos y científicos.
Explica el funcionamiento de máquinas de uso común a partir de
nociones científicas.
Aplica normas de seguridad en el manejo de sustancias, instrumentos
y equipo en la realización de actividades de su vida cotidiana.
Elabora piezas mecánicas con centros de
maquinado de control numérico.
Cuantifica, representa y contrasta experimental o matemáticamente
magnitudes del espacio que lo rodea.
Interpreta tablas, gráficas, mapas, diagramas y textos con símbolos
matemáticos y científicos.
Explica el funcionamiento de máquinas de uso común a partir de
nociones científicas.
Aplica normas de seguridad en el manejo de sustancias, instrumentos
y equipo en la realización de actividades de su vida cotidiana.
COMPETENCIAS DISCIPLINARES RELACIONADAS

MÓDULO III
Elabora piezas mecánicas con torno y fresadora convencional y de control numérico
HRS/SEMESTRE
272
SUBMÓDULO I Elabora piezas mecánicas con torno y fresadora convencionales. HRS/SEMESTRE
144
RESULTADO DE
APRENDIZAJE DEL
SUBMÓDULO
Al termino del modulo, el alumno será capaz de interpretar planos de piezas mecánicas, así mismo podrá
manipular maquinas herramientas que apoyen la elaboración de piezas mecánicas, en torno y fresadora
convencional. El uso de herramientas alternas para el afilado de herramientas de corte y desbaste. Al
término del módulo el alumno será capaz de laborar en áreas que utilizan en sus procesos de
manufactura, máquinas y herramientas.
COMPETENCIAS PROFESIONALES ESTRATEGIAS DIDÁCTICAS PARA
EL LOGRO DE LAS COMPETENCIAS. EVIDENCIAS
ELEMENTOS PARA LA
EVALUACIÓN
GUÍA DIDÁCTICA DEL SUBMÓDULO I

1.Interpreta y analiza las
características del dibujo
técnico en base a estándares
ANSI
Atributos de la Competencia:
Obtiene información
acerca de los
estándares para dibujo
técnico.
Obtiene información
acerca de las
tolerancias que rigen
un dibujo tecnico.
Investiga los tipos de
tolerancia geométrica y
forma.
Investiga la elaboración
de elipses en los
diferentes tipos de
perspectivas.
Aplica las normas que
rigen en función del
dibujo técnico.
Apertura Encuadre grupal para:
Recuperar conocimientos y experiencia previos a través de una evaluación diagnóstica.
Promover la integración grupal y la comunicación.
Identificar las expectativas de los alumnos.
Presentar el módulo mencionando nombre, justificación, competencias de ingreso, duración y resultado de aprendizaje.
Presentar el submódulo mencionando el resultado de aprendizaje, duración, contenido, metodología de trabajo, normas de convivencia y formas de evaluación.
Coordinar con las diferentes academias de interés del Componente de Formación Básica, con el propósito de establecer estrategias de apoyo para el dominio de los
Conocimiento
Cuestionario
Resumen
EVALUACIÓN DIAGNÓSTICA
Heteroevalaución
Coevaluación

Saberes de la competencia
Elaboración de planos
a mano alzada.
Tipos de líneas.
Formas de las líneas,
circulo, elipse,
paralelogramo.
Tolerancias
geométricas
Tipos de acotaciones
Identifica la simbología
principal en la
elaboración de planos.
Tipos de vistas
(europea y
americana).Elaboración
de piezas mecánicas,
utilizando tolerancias
geométricas y de
forma.
Elaboración de piezas
mecánicas en 2D y 3D.
Tipos de perspectivas
(isométrica, caballera,
aspectos conceptuales.
Desarrollo Promueve una investigación bibliográfica de los fundamentos (línea, círculo, tipos de trazado, software para diseño mecánico), sensibilidad y calibración de los instrumentos de medición. Realiza la demostración de cómo se realiza la elaboración de planos en estándares europeos y
Desempeño
Guía de Observación
Reportes
Ejercicios
EVALUACIÓN
FORMATIVA
Heteroevalaución
Autoevaluación

dimétrico, etc.…)
Tipos de identificación
de materiales según
normatividades.
americanos. Promueve una práctica grupal para realizar la elaboración de dibujos a mano alzada, utilizando normatividades para el dibujo.
Cierre:
Efectúa ejercicios prácticos para
la elaboración de dibujos simples
aplicando las normas de dibujo
técnico
Realiza actividades de
retroalimentación y evaluación
correspondientes para verificar el
resultado de aprendizaje y le hace
ver al alumno los resultados
obtenidos
Solicita la integración del
portafolio de evidencias para la
sistematización y valoración de
las evidencias de desempeño,
producto y conocimiento del
contenido
Producto: Producto terminado Lista de cotejo Rubrica Matriz de resultados Hojas de proceso
EVALUACIÓN
FORMATIVA
Autoevaluación
Heteroevaluación
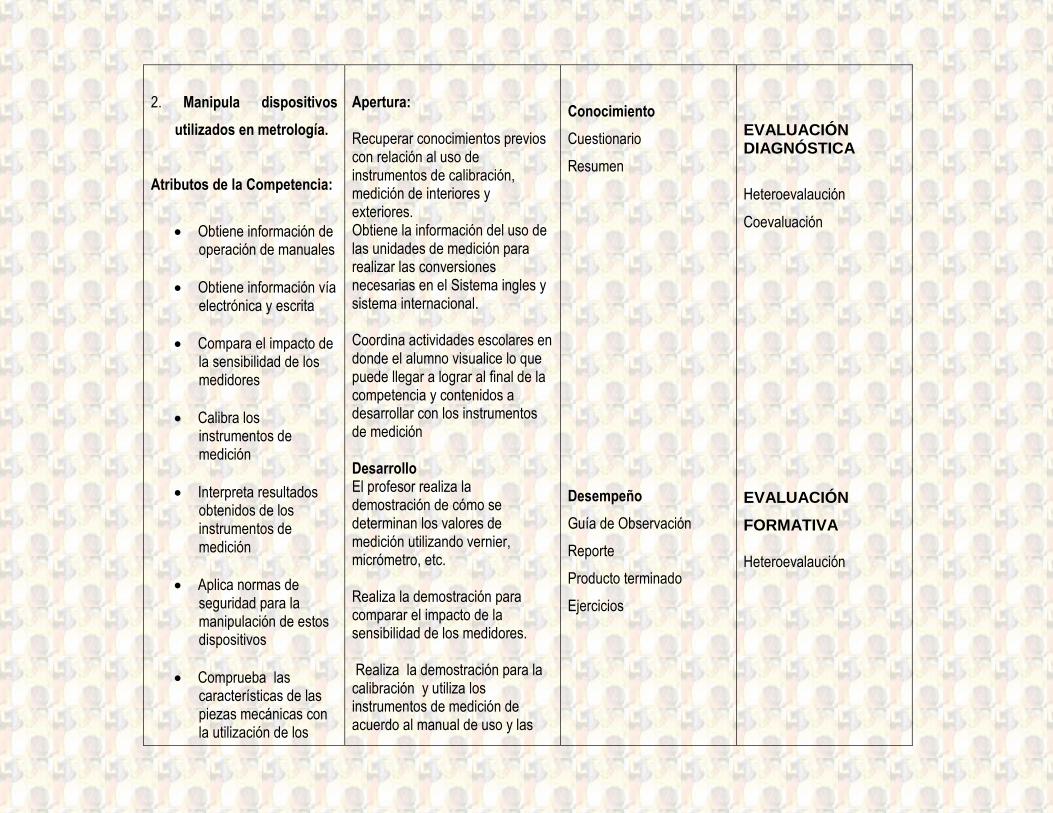
2. Manipula dispositivos
utilizados en metrología.
Atributos de la Competencia:
Obtiene información de operación de manuales
Obtiene información vía electrónica y escrita
Compara el impacto de la sensibilidad de los medidores
Calibra los instrumentos de medición
Interpreta resultados obtenidos de los instrumentos de medición
Aplica normas de seguridad para la manipulación de estos dispositivos
Comprueba las características de las piezas mecánicas con la utilización de los
Apertura: Recuperar conocimientos previos con relación al uso de instrumentos de calibración, medición de interiores y exteriores. Obtiene la información del uso de las unidades de medición para realizar las conversiones necesarias en el Sistema ingles y sistema internacional. Coordina actividades escolares en donde el alumno visualice lo que puede llegar a lograr al final de la competencia y contenidos a desarrollar con los instrumentos de medición Desarrollo El profesor realiza la demostración de cómo se determinan los valores de medición utilizando vernier, micrómetro, etc. Realiza la demostración para comparar el impacto de la sensibilidad de los medidores. Realiza la demostración para la calibración y utiliza los instrumentos de medición de acuerdo al manual de uso y las
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
EVALUACIÓN DIAGNÓSTICA
Heteroevalaución
Coevaluación
EVALUACIÓN
FORMATIVA
Heteroevalaución

dispositivos de metrología.
Saberes de la competencia:
Unidades de medida
(sistema métrico y
sistema ingles)
Conversión de
unidades
Medidores de
exteriores
Tipos de medidores de
exteriores
Medidores de interiores
Tipos de medidores de
interiores.
Medidores de
profundidad.
Medidores de caratula
Palpadores
medidas de seguridad e higiene. Cierre El profesor plantea una práctica grupal donde el alumno sigua las instrucciones y obtenga en resultado de las lecturas obtenidas con diversos calibradores de medición.
64. Producto
65. Lista de Cotejo
66. Reporte de resultados
67. Producto terminado
Ejercicios Rubrica
EVALUACIÓN
SUMATIVA
Heteroevalaución
Coevaluación
Autoevaluación

3. Utiliza y manipula
maquinas-
herramientas para la
elaboración de piezas
mecánicas
Atributos de la Competencia:
Interpreta planos de piezas mecánicas.
Aplica normas de seguridad para la manipulación de estos dispositivos
Obtiene información de operación de los diferentes tipos de maquinaria utilizados para la fabricación de piezas mecánicas vía electrónica y escrita
Relaciona el funcionamiento de las maquinas herramientas de acuerdo con la pieza a elaborar
Realiza los cálculos
Apertura Recupera conocimientos previos relacionados con el uso de las maquinas herramientas mediante investigaciones de hojas de características de los dispositivos usados en el taller de trabajo. Mediante esquemas los alumnos exponen y discuten las características de las maquinas herramientas y los métodos de verificación de funcionamiento Promueve la integración y comunicación grupal con la aplicación de técnicas o ejercicios vivenciales adecuados a los estudiantes, las habilidades del docente y relacionados con las maquinas herramientas y las normas de seguridad. Desarrollo Promover trabajo en colaboración para integrar en un diagrama de flujo como obtener una pieza mecánica determinando las maquinas herramientas que se utilizarían. El profesor plantea una práctica
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
EVALUACIÓN DIAGNÓSTICA
Heteroevalaución
EVALUACIÓN
FORMATIVA
Heteroevalaución
Coevaluación

para obtener las velocidades de corte de los diferentes tipos de herramienta
Elabora reporte de resultados
Saberes de la competencia:
Normas de seguridad e higiene en el uso del equipo
Equipo de protección personal para manipular el equipo.
Tipos de maquinas herramientas (taladro de mano, de banco, esmeril, pulidora, etc.)
Funcionamiento principal de las maquinas herramientas,
Maquinados por desprendimiento de viruta.
demostrativa con procedimientos de operación y verificación utilizando los instrumentos de medición para que el alumno obtenga los resultados de operación Efectúa ejercicios prácticos con las maquinas herramientas para fortalecer la operación de las mismas con los alumnos aplicando la motivación, supervisión, y toma de decisiones. Recrea la simulación de situaciones para el ajuste de las maquinas herramientas para efectuar correcciones de fabricación de piezas mecánicas para retroalimentar los conocimientos de los alumnos Cierre Realizar la retroalimentación y la evaluación correspondiente para verificar el logro de las competencias y el alumno entrega reporte de práctica con los lineamientos de los criterios de evaluación.
68. Producto
69. Lista de Cotejo
70. Reporte de resultados
71. Producto terminado
Ejercicios Rubrica
EVALUACIÓN
SUMATIVA
Heteroevalaución
Autoevaluación
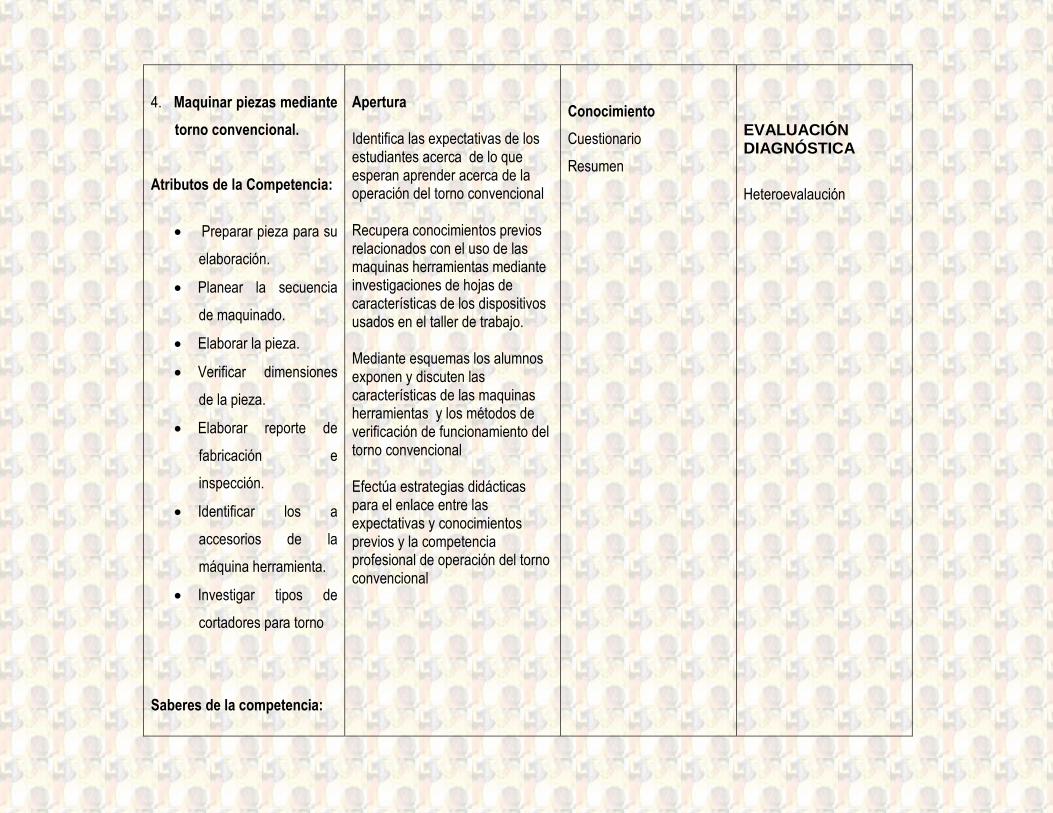
4. Maquinar piezas mediante
torno convencional.
Atributos de la Competencia:
Preparar pieza para su
elaboración.
Planear la secuencia
de maquinado.
Elaborar la pieza.
Verificar dimensiones
de la pieza.
Elaborar reporte de
fabricación e
inspección.
Identificar los a
accesorios de la
máquina herramienta.
Investigar tipos de
cortadores para torno
Saberes de la competencia:
Apertura Identifica las expectativas de los estudiantes acerca de lo que esperan aprender acerca de la operación del torno convencional Recupera conocimientos previos relacionados con el uso de las maquinas herramientas mediante investigaciones de hojas de características de los dispositivos usados en el taller de trabajo. Mediante esquemas los alumnos exponen y discuten las características de las maquinas herramientas y los métodos de verificación de funcionamiento del torno convencional Efectúa estrategias didácticas para el enlace entre las expectativas y conocimientos previos y la competencia profesional de operación del torno convencional
Conocimiento
Cuestionario
Resumen
EVALUACIÓN DIAGNÓSTICA
Heteroevalaución

Manejo del torno
convencional
Conocimiento del
equipo de protección
personal
Interpretar hojas de
especificaciones.
Velocidad de avance y
de corte del los
diferentes tipos de
materiales.
Operaciones
necesarias en un torno
convencional.
Elaboración de cuerdas
y roscas.
Accesorios utilizados
en el torno.
Desarrollo Promover trabajo en colaboración para integrar en un diagrama de flujo como obtener una pieza mecánica determinando las maquinas herramientas que se utilizarían. El profesor plantea una práctica demostrativa con procedimientos de operación y verificación utilizando los instrumentos de medición para que el alumno obtenga los resultados de operación y contemplando las normas de seguridad Cierre Realizar la retroalimentación y la evaluación correspondiente para verificar el logro de las competencias y el alumno entrega reporte de práctica con los lineamientos de los criterios de evaluación.
Prepara la practica integradora
para la fabricación de piezas
mecánicas con el torno
convencional
Desempeño
Guía de Observación
Reporte
Ejercicios
72. Producto
73. Lista de Cotejo
74. Reporte de resultados
75. Producto terminado
Ejercicios Rubrica
EVALUACIÓN
FORMATIVA
Heteroevalaución
Autoevaluación
EVALUACIÓN
SUMATIVA
Autoevaluación

5. Maquinar piezas mecánicas mediante la fresadora. Atributos de la Competencia:
Identificar partes de
una maquina del tipo
fresadora
Planear la secuencia
de la puesta en marcha
de la fresadora.
Elaborar la pieza
maquinada en la
fresadora.
Verificar la pieza
maquinada en la
fresadora
Saberes de la competencia:
Manejo de maquina
fresadora
Conocimientos de
equipo de protección
personal
Interpreta hojas de
Apertura Recupera conocimientos previos relacionados con el uso de las maquinas herramientas mediante investigaciones de hojas de características de los dispositivos usados en el taller de trabajo. Mediante esquemas los alumnos exponen y discuten las características de las maquinas herramientas y los métodos de verificación de funcionamiento El profesor forma grupos de investigación para obtener información de las características de los materiales para realizar un desbaste, planeando la recolección de la información y diseña las actividades de cada equipo para obtener una visión general de los diferentes tipos de materiales. Desarrollo Promover trabajo en colaboración para integrar en un diagrama de flujo como obtener una pieza mecánica determinando las maquinas herramientas que se utilizarían.
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
EVALUACIÓN DIAGNÓSTICA
Heteroevalaución
Coevaluación
Autoevaluación
EVALUACIÓN
FORMATIVA
Heteroevalaución
Coevaluación

especificaciones
Manipula instrumentos
de medición.
El profesor plantea una práctica demostrativa con procedimientos de operación y verificación utilizando los instrumentos de medición para que el alumno obtenga los resultados de operación Con los conocimientos adquiridos en la apertura el profesor propone practicas grupales de desarrollo los cuales son seleccionados por los equipos y los asesora al estar desarrollándolos y promueve:
Responsabilidades individuales
Igualdad de oportunidades
Metas de tipo grupal Utiliza tablas en las cuales se notifican las normatividades a seguir para un desbaste correcto de distintos materiales, así mismo, cada equipo elabora una pieza mecánica utilizando la máquina herramienta. Colocando y haciendo uso de los accesorios necesarios para la elaboración de la misma.
Producto
Autoevaluación

Cierre Realizar la retroalimentación y la evaluación correspondiente para verificar el logro de las competencias y el alumno entrega reporte de práctica con los lineamientos de los criterios de evaluación. Efectúa ejercicios prácticos en la operación de la fresa convencional Prepara y aplica la practica integradora para retroalimentar los conocimientos adquiridos y solicita la integración del portafolio de evidencias para la sistematización y valoración de las evidencias de desempeño, producto y de conocimiento.
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
EVALUACIÓN
SUMATIVA
Heteroevalaución
Autoevaluación

MÓDULO III
Elabora piezas mecánicas con torno y fresadora convencional y de control numérico
HRS/SEMESTRE
272
SUBMÓDULO II Elabora piezas mecánicas con centros de maquinado y de control
numérico.
HRS/SEMESTRE
128
RESULTADO DE
APRENDIZAJE DEL
SUBMÓDULO
Al termino del modulo, el alumno será capaz de interpretar planos de piezas mecánicas, así mismo podrá
manipular maquinas herramientas que apoyen la elaboración de piezas mecánicas, en torno y centros
de maquinado que se programen con control numérico. Será capaz de laborar en áreas que utilizan en
sus procesos de manufactura, máquinas y herramientas de control numérico.
COMPETENCIAS PROFESIONALES ESTRATEGIAS DIDÁCTICAS PARA
EL LOGRO DE LAS COMPETENCIAS. EVIDENCIAS
ELEMENTOS PARA LA
EVALUACIÓN
1.Ubica puntos en el
espacio
Atributos de la Competencia:
Obtiene información
sobre sistemas de
coordenadas
Analiza la ubicación de
puntos con vectores
Investiga sistemas de
Apertura Encuadre grupal para:
Recuperar conocimientos y experiencia previos a través de una evaluación diagnóstica.
Promover la integración grupal y la comunicación.
Identificar las expectativas de los alumnos.
Conocimiento
Cuestionario
Resumen
EVALUACIÓN DIAGNÓSTICA
Heteroevalaución
GUÍA DIDÁCTICA DEL SUBMÓDULO II

coordenadas: polar,
cartesianos y
cilíndricos
Utiliza coordenadas
absolutas, relativas e
incrementales
Saberes de la competencia
Elaboración de
sistemas de
coordenadas
Conversión de
coordenadas entre
sistemas de referencia
Notación vectorial
Presentar el módulo mencionando nombre, justificación, competencias de ingreso, duración y resultado de aprendizaje.
Presentar el submódulo mencionando el resultado de aprendizaje, duración, contenido, metodología de trabajo, normas de convivencia y formas de evaluación.
Coordinar con las diferentes
academias de interés del
Componente de Formación
Básica, con el propósito de
establecer estrategias de apoyo
para el dominio de los aspectos
conceptuales.
Desarrollo Promueve una investigación bibliográfica de los fundamentos de sistemas de unidades y tipos de coordenadas utilizados en maquinas de control numérico para ubicar puntos en el espacio en dos y tres dimensiones
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
EVALUACIÓN
FORMATIVA
Heteroevaluación
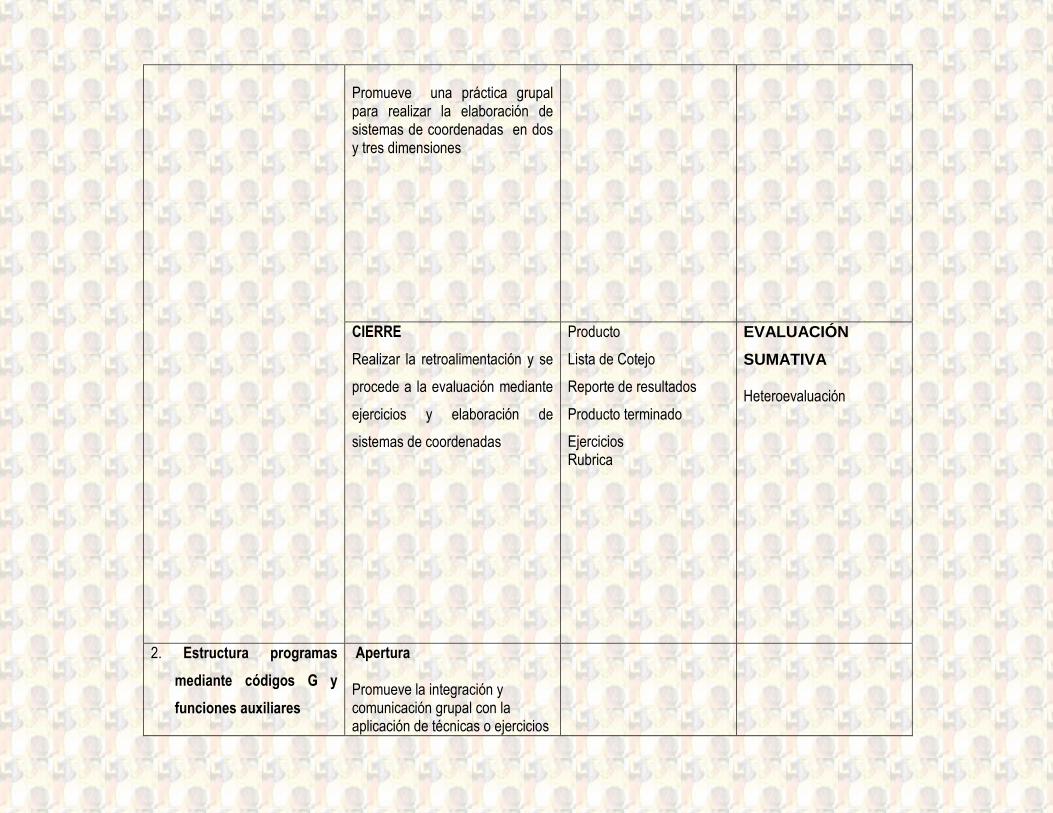
Promueve una práctica grupal para realizar la elaboración de sistemas de coordenadas en dos y tres dimensiones
CIERRE
Realizar la retroalimentación y se
procede a la evaluación mediante
ejercicios y elaboración de
sistemas de coordenadas
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
EVALUACIÓN
SUMATIVA
Heteroevaluación
2. Estructura programas
mediante códigos G y
funciones auxiliares
Apertura Promueve la integración y comunicación grupal con la aplicación de técnicas o ejercicios

Atributos de la Competencia:
Obtiene información de operación de manuales
Obtiene información vía electrónica y escrita
Investiga los códigos G M para torno y centro de maquinado
Investiga le estructura básica de un programa de control numérico
Realiza programas en coordenadas absolutas e incrementales
Utiliza software de simulación de programas de control numérico
Calcula las velocidades de las herramientas de corte
El alumno interpreta planos de dibujo técnico industrial
vivenciales adecuados a los estudiantes, a las habilidades del docente y relacionados con los códigos de control numérico y simuladores de centros de maquinado CNC Investiga el origen del control numérico y su historia El alumno investiga las coordenadas utilizadas en programas de control numérico absolutas e incrementales Investiga los códigos de control numérico utilizados y funciones auxiliares de diferentes marcas Mediante lluvia de ideas compara resultados con sus compañeros y obtiene un resumen de todos los códigos obtenidos Desarrollo El profesor realiza la demostración la estructura básica de un programa de control numérico y explica el funcionamiento y operación del simulador para verificar las rutas de corte. Los alumnos realizan ejercicios en
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de observación
Ejercicios
Reportes de practicas
EVALUACIÓN DIAGNÓSTICA
Heteroevalaución
Coevaluación
Autoevaluación
EVALUACIÓN
FORMATIVA
Heteroevalaución
Coevaluación
Autoevaluación
EVALUACIÓN
SUMATIVA
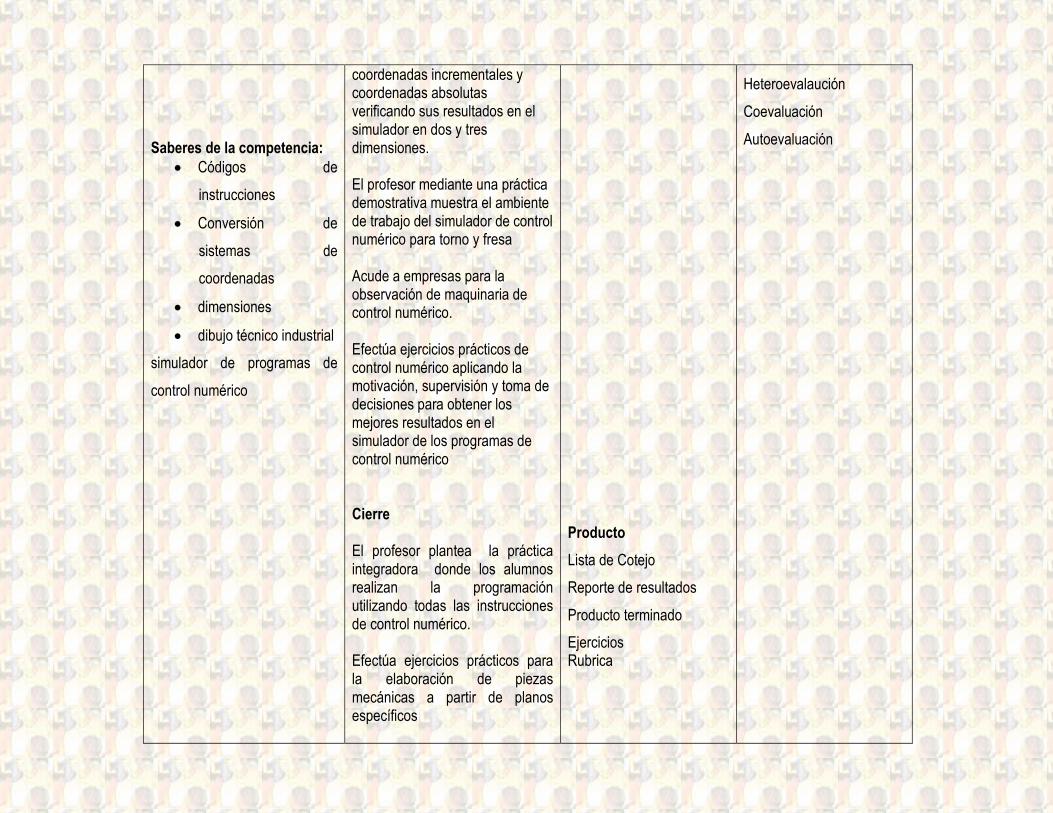
Saberes de la competencia:
Códigos de
instrucciones
Conversión de
sistemas de
coordenadas
dimensiones
dibujo técnico industrial
simulador de programas de
control numérico
coordenadas incrementales y coordenadas absolutas verificando sus resultados en el simulador en dos y tres dimensiones. El profesor mediante una práctica demostrativa muestra el ambiente de trabajo del simulador de control numérico para torno y fresa Acude a empresas para la observación de maquinaria de control numérico. Efectúa ejercicios prácticos de control numérico aplicando la motivación, supervisión y toma de decisiones para obtener los mejores resultados en el simulador de los programas de control numérico Cierre El profesor plantea la práctica integradora donde los alumnos realizan la programación utilizando todas las instrucciones de control numérico. Efectúa ejercicios prácticos para la elaboración de piezas mecánicas a partir de planos específicos
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
Heteroevalaución
Coevaluación
Autoevaluación
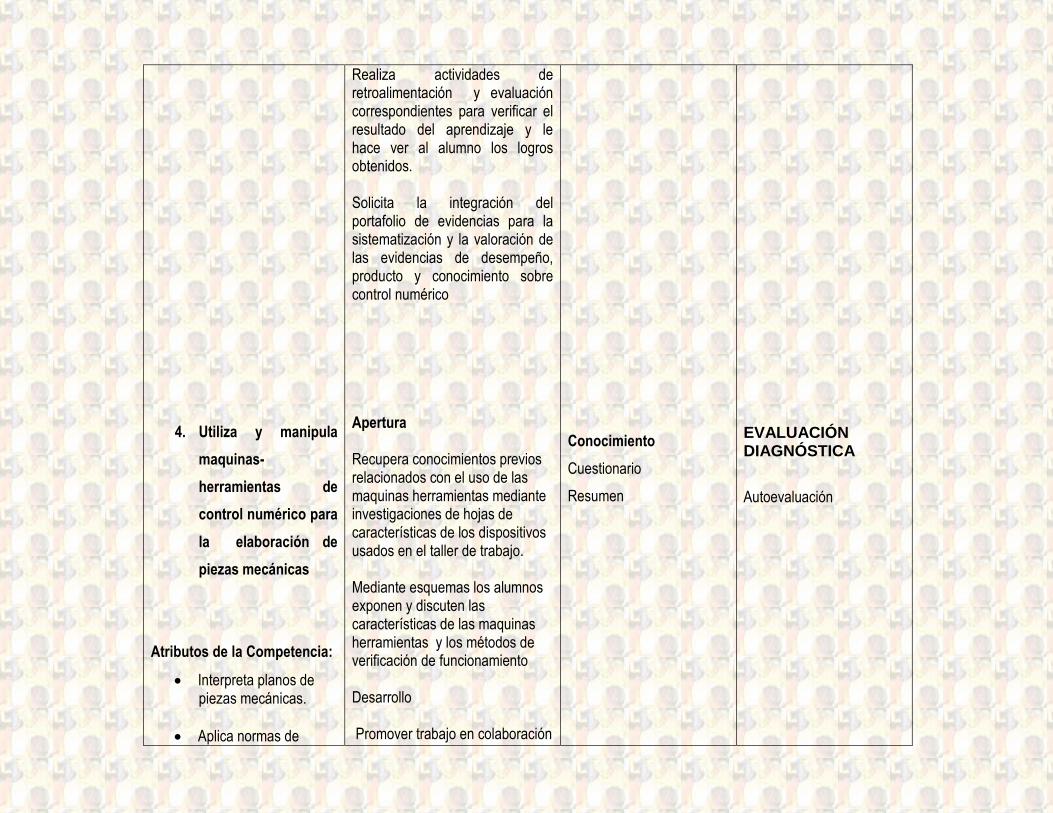
4. Utiliza y manipula
maquinas-
herramientas de
control numérico para
la elaboración de
piezas mecánicas
Atributos de la Competencia:
Interpreta planos de piezas mecánicas.
Aplica normas de
Realiza actividades de retroalimentación y evaluación correspondientes para verificar el resultado del aprendizaje y le hace ver al alumno los logros obtenidos. Solicita la integración del portafolio de evidencias para la sistematización y la valoración de las evidencias de desempeño, producto y conocimiento sobre control numérico
Apertura Recupera conocimientos previos relacionados con el uso de las maquinas herramientas mediante investigaciones de hojas de características de los dispositivos usados en el taller de trabajo. Mediante esquemas los alumnos exponen y discuten las características de las maquinas herramientas y los métodos de verificación de funcionamiento Desarrollo Promover trabajo en colaboración
Conocimiento
Cuestionario
Resumen
EVALUACIÓN DIAGNÓSTICA
Autoevaluación
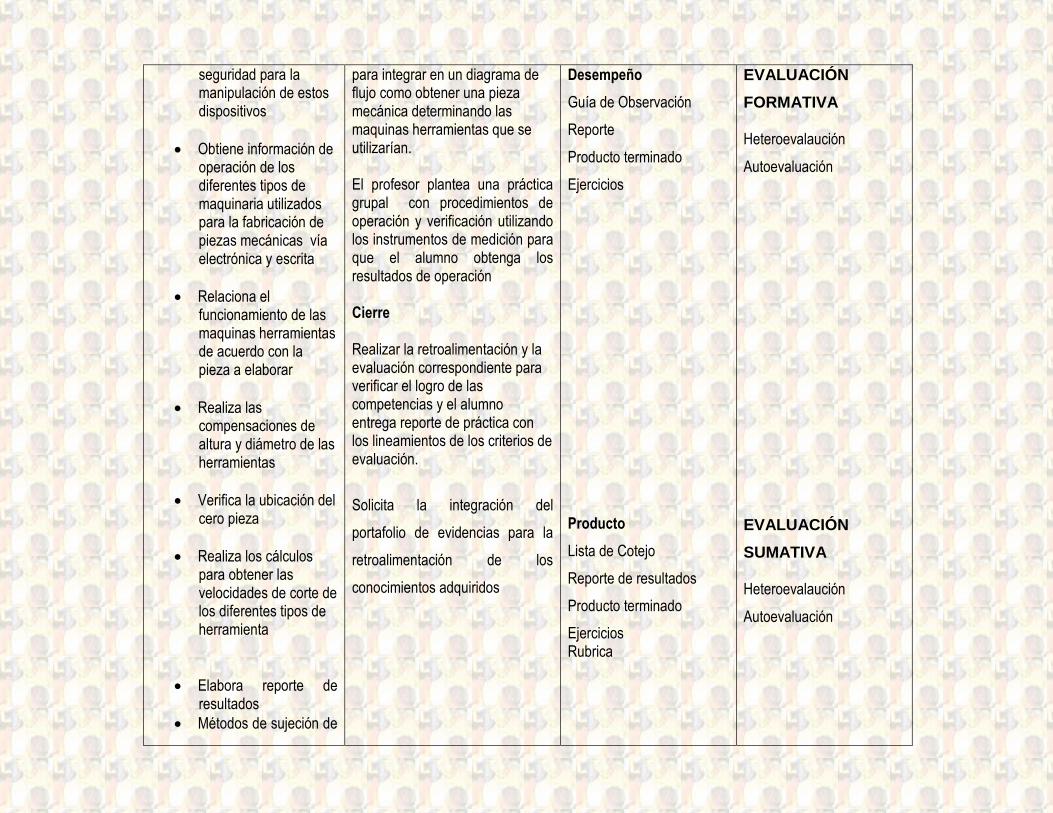
seguridad para la manipulación de estos dispositivos
Obtiene información de operación de los diferentes tipos de maquinaria utilizados para la fabricación de piezas mecánicas vía electrónica y escrita
Relaciona el funcionamiento de las maquinas herramientas de acuerdo con la pieza a elaborar
Realiza las compensaciones de altura y diámetro de las herramientas
Verifica la ubicación del cero pieza
Realiza los cálculos para obtener las velocidades de corte de los diferentes tipos de herramienta
Elabora reporte de resultados
Métodos de sujeción de
para integrar en un diagrama de flujo como obtener una pieza mecánica determinando las maquinas herramientas que se utilizarían. El profesor plantea una práctica grupal con procedimientos de operación y verificación utilizando los instrumentos de medición para que el alumno obtenga los resultados de operación Cierre Realizar la retroalimentación y la evaluación correspondiente para verificar el logro de las competencias y el alumno entrega reporte de práctica con los lineamientos de los criterios de evaluación.
Solicita la integración del
portafolio de evidencias para la
retroalimentación de los
conocimientos adquiridos
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
EVALUACIÓN
FORMATIVA
Heteroevalaución
Autoevaluación
EVALUACIÓN
SUMATIVA
Heteroevalaución
Autoevaluación
material en maquinas de control numérico
Metrología para verificar el material terminado
Saberes de la competencia:
Normas de seguridad e higiene en el uso del equipo
Equipo de protección personal para manipular el equipo.
Velocidades de corte
Funcionamiento principal de las maquinas herramientas de control numérico
. 5. Maquinar piezas
mediante torno de control
numérico.
Apertura: El profesor forma grupos de investigación para obtener información de las características de los materiales para realizar un
Conocimiento
Cuestionario
EVALUACIÓN
DIAGNOSTICA
Heteroevaluación

Atributos de la Competencia:
Preparar pieza para su
elaboración.
Planear la secuencia
de maquinado.
Elaborar la pieza.
Verificar dimensiones
de la pieza.
Elaborar reporte de
fabricación e
inspección.
Identificar los a
accesorios de la
máquina herramienta.
Investigar tipos de
cortadores para torno
Calcular las
velocidades de las
herramientas
Realiza la
compensación de las
herramientas
Realiza diferentes tipos
desbaste, planeando la recolección de la información y diseña las actividades de cada equipo para obtener una visión general de los diferentes tipos de materiales. Realiza un cuestionario diagnostico para verificar los conocimientos de códigos de control numérico Desarrollo: Con los conocimientos adquiridos en la apertura el profesor propone practicas grupales de desarrollo los cuales son seleccionados por los equipos y los asesora al estar desarrollándolos y promueve:
Resumen
Desempeño
Guía de Observación
Coevaluación
EVALUACIÓN
FORMATIVA

de corte y cuerdas en
el torno de control
numérico
Saberes de la competencia:
Manejo del torno
convencional
Conocimiento del
equipo de protección
personal
Interpretar hojas de
especificaciones.
Velocidad de avance y
de corte del los
diferentes tipos de
materiales.
Operaciones
necesarias en un torno
convencional.
Elaboración de cuerdas
y roscas.
Accesorios utilizados
en el torno.
Responsabilidades individuales
Igualdad de oportunidades
Metas de tipo grupal Utiliza tablas en las cuales se notifican las normatividades a seguir para un desbaste correcto de distintos materiales, así mismo, cada equipo elabora una pieza mecánica utilizando la máquina herramienta. Colocando y haciendo uso de los accesorios necesarios para la elaboración de la misma. Realiza practicas demostrativas para que el alumno siga los procedimientos determinados para diferentes técnicas de fabricación Efectúa ejercicios prácticos para ala fabricación de piezas mecánicas en el torno de control numérico aplicando la motivación , supervisión y toma de decisiones Cierre: Los alumnos presentan sus prácticas utilizando los materiales seleccionados, explicando los retos que tuvieron al realizarlo, como los solucionaron, y
Reporte
Ejercicios
Producto
Lista de Cotejo
Heteroevaluación
Coevaluación
Autoevaluación
EVALUACIÓN
SUMATIVA
Heteroevaluación
Coevaluación

5. Maquinar piezas mecánicas mediante la fresadora. Atributos de la Competencia:
Identificar partes de
una maquina del tipo
fresadora
Planear la secuencia
de la puesta en marcha
de la fresadora.
Elaborar la pieza
maquinada en la
fresadora.
Verificar la pieza
maquinada en la
fresadora
Saberes de la competencia:
Manejo de maquina
fresadora
Conocimientos de
elaborando reportes de resultados.
Realiza actividades de
retroalimentación y evaluación
correspondientes para verificar el
resultado de aprendizaje y le hace
ver al alumno los resultados
obtenidos
Propone proyectos para la
fabricación de piezas mecánicas
siguiendo hojas de procesos
Reporte de resultados
Producto terminado
Ejercicios Rubrica
Autoevaluación

equipo de protección
personal
Interpreta hojas de
especificaciones
Manipula instrumentos de medición.

Noviembre 2010
PPRROOGGRRAAMMAA DDEE EESSTTUUDDIIOO
TTééccnniiccoo eenn MMeeccaattrróónniiccaa
Módulo IV
Aplica procesos de manufactura asistido por computadora.
RREEFFOORRMMAA IINNTTEEGGRRAALL DDEE LLAA EEDDUUCCAACCIIÓÓNN MMEEDDIIAA SSUUPPEERRIIOORR

La carrera de Técnico en Mecatrónica fue creada para dar solución a las demandas de la Industria en constante
evolución, a partir del aumento en el desempeño de las fábricas con respecto a cantidades de producción, calidad del
producto y eficiencia en cuanto a costo de producción para ser competitivas.
Se ha observado una creciente automatización de los procesos productivos en muchas empresas, de ahí y debido a la
globalización, que es inminente la automatización en la producción industrial. A la vez, surge la necesidad de la
especialización de mano de obra que conserve las máquinas y sus dispositivos para su eficiente desempeño.
El cuarto módulo está orientado a que el alumno aprenda el software de diseño de piezas mecánicas (CAD),
software de manufactura asistida por computadora (CAM). Y la programación, instalación y operación de robots en
sistemas automatizados de control así como realizar ajustes a mecanismos que se utilizan en sistemas de producción
automatizada.
DESCRIPCIÓN DEL MÓDULO IV

Es un texto breve que describe:
Propósitos específicos de aprendizaje de cada submódulo
NOMBRE DEL SUB
MÓDULO
PROPÓSITOS ESPECÍFICOS DE APRENDIZAJE
1.- Elabora piezas
mecánicas por medio de
CAD/CAM.
En este submódulo el alumno adquiere los
conocimientos y habilidades para realizar los dibujos de piezas
mecánicas por medio de software de simulación y crea los
programas de control numérico con software de manufactura
2.- Manipula robots en
procesos mecatrónicos
La implementación de autómatas en la industria
implica que el alumno entienda el funcionamiento de
mecanismos, programación y modificación de aplicaciones
Mecatrónicas que implican robots en su funcionamiento.
PROPÓSITOS ESPECÍFICOS DE APRENDIZAJE DEL MÓDULO

En el modulo cuatro el alumno utiliza las herramientas tecnológicas como son los software de diseño y fabricación de piezas
mecánicas así como los robots en procesos de manufactura es importante que el alumno tenga una actitud responsable y
tolerante y de respeto ya que los autómatas ser un peligro si no se respetan las normas de seguridad correspondientes. Para
esto se aplica un diagnostico de forma individual y grupal para identificar a los estudiantes sobre los conocimientos de normas de
seguridad, manejo de la PC y de robots . Se identifican las expectativas de los estudiantes acerca de lo que esperan aprender
en este modulo de fabricación de piezas mecánicas por medio de CAD/CAM. Se coordinan actividades escolares donde el
alumno visualice lo que puede llegar a lograr al final de la competencia. Se presentaran varias prácticas demostrativas para que
el alumno contemple las normas de seguridad y la operación de los diferentes tipos de robots y software de diseño y fabricación
e instrumentos de medición mecánicos. Se efectuaran ejercicios prácticos de la manipulación de las maquinas herramientas de
control numérico así como de los robots .
Se programara la elaboración de proyectos donde el alumno realizara las actividades de retroalimentación y evaluación
correspondientes para verificar el resultado de aprendizaje y hacerle ver al alumno los resultados obtenidos. Se verificaran los
productos terminados con los instrumentos de medición mecánica y se solicitara la integración del portafolio de evidencias.
MÉTODOS Y ACTIVIDADES PARA ALCANZAR LOS PROPÓSITOS DE APRENDIZAJE DEL MÓDULO

El diseño y manufactura de piezas mecánicas asistido por computadora requiere de el uso de las tecnologías de la
información en la mayor parte del curso por los software de diseño y manufactura, simuladores para verificar las opresiones
creadas por el software de manufactura y simuladores gráficos de operación de las maquinas herramientas de control numérico.
Para la operación de robots los programas de programación simulación y enlace con otros componentes se realizan con el uso
de las tecnologías de la información así como buscar los comandos de operación de los diferentes tipos de robots
DESARROLLO DIDÁCTICO DE LAS TECNOLOGÍAS DE LA INFORMACIÓN Y LA COMUNICACIÓN
EN EL MÓDULO
El curso abarca competencias que en particular, requiere de conocimientos previos que el alumno debe poseer al tomar el curso.
Lógica matemática es de vital importancia para lograr un aprendizaje significativo el cuál se puede lograr mediante estrategias
didácticas que encaminen a desarrollar esta habilidad.
El dominio del idioma inglés facilita al alumno a comprender con claridad las características de los software de diseño y
manifactura para fabricar piezas mecánicas y lo motiva a aprender con iniciativa propia y lo motiva a trabajar de manera
colaborativa con sus compañeros. Por otra parte, gran parte de los manuales y herramientas de los robots se encuentran el
idioma inglés.
El curso abarca relevantemente el uso de coordenadas en el espacio y expresa el funcionamiento de maquinas herramientas e
interpretara planos y diagramas, los cuales forman parte del sistema mecatrónico que el alumno debe manipular y creara
innovaciones que lo motivaran a superarse y lograr sus metas personales.
Por otra parte, el alumno realiza investigaciones que lo forzan a desarrollar la habilidad de investigar y comprender una lectura. El
alumno debe hacer uso de las técnicas de lectura y redacción adquiridas durante su formación académica para formular trabajos
de acuerdo a las necesidades.
RECOMENDACIONES ACADÉMICAS PARA TRABAJO INTERDISCIPLINARIO EN EL LOGRO DE
LAS COMPETENCIAS GENÉRICAS

SUBMÓDULO COMPETENCIAS GENÉRICAS A DESARROLLARSE.
Elabora piezas mecánicas por medio de CAD/CAM. - Se conoce y valora a sí mismo y aborda problemas y
retos teniendo en cuenta los objetivos que persigue.
- Escucha, interpreta y emite mensajes pertinentes en
distintos contextos mediante la utilización de medios,
códigos y herramientas apropiados.
- Desarrolla innovaciones y propone soluciones a problemas a partir de métodos establecidos.
- Sustenta una postura personal sobre temas de interés y
relevancia general, considerando otros puntos de vista
de manera crítica y reflexiva.
- Aprende por iniciativa e interés propio a lo largo de la
vida.
- Participa y colabora de manera efectiva en equipos
diversos.
Manipula robots en procesos mecatrónicos - Se conoce y valora a sí mismo y aborda problemas y
retos teniendo en cuenta los objetivos que persigue.
- Escucha, interpreta y emite mensajes pertinentes en
distintos contextos mediante la utilización de medios,
códigos y herramientas apropiados.
- Desarrolla innovaciones y propone soluciones a problemas a partir de métodos establecidos.
- Sustenta una postura personal sobre temas de interés y
COMPETENCIAS GENÉRICAS RELACIONADAS

relevancia general, considerando otros puntos de vista
de manera crítica y reflexiva.
- Aprende por iniciativa e interés propio a lo largo de la
vida.
- Participa y colabora de manera efectiva en equipos
diversos.
SUBMÓDULO COMPETENCIAS DISCIPLINARES A DESARROLLARSE.
Elabora piezas mecánicas por medio de
CAD/CAM.
Cuantifica, representa y contrasta experimental o matemáticamente
magnitudes del espacio que lo rodea.
Interpreta tablas, gráficas, mapas, diagramas y textos con símbolos
matemáticos y científicos.
Explica el funcionamiento de máquinas de uso común a partir de
nociones científicas.
Aplica normas de seguridad en el manejo de sustancias, instrumentos
y equipo en la realización de actividades de su vida cotidiana.
Manipula robots en procesos Mecatrónicos. Cuantifica, representa y contrasta experimental o matemáticamente
magnitudes del espacio que lo rodea.
Interpreta tablas, gráficas, mapas, diagramas y textos con símbolos
matemáticos y científicos.
Explica el funcionamiento de máquinas de uso común a partir de
nociones científicas.
Aplica normas de seguridad en el manejo de sustancias, instrumentos
y equipo en la realización de actividades de su vida cotidiana.
COMPETENCIAS DISCIPLINARES RELACIONADAS
MÓDULO IV Aplica procesos de manufactura asistido por computadora. HRS/SEMESTRE
192
SUBMÓDULO I Elabora piezas mecánicas por medio de CAD/CAM. HRS/SEMESTRE
112
RESULTADO DE
APRENDIZAJE DEL
SUBMÓDULO
El alumno es capaz de elaborar piezas mecánicas por medio del software de CAD/CAM, así como de
manipular robots y podrá laborar en las áreas de automatización y manufactura.
COMPETENCIAS PROFESIONALES
ESTRATEGIAS DIDÁCTICAS PARA
EL LOGRO DE LAS
COMPETENCIAS.
EVIDENCIAS ELEMENTOS PARA LA
EVALUACIÓN
1. Interpreta y analiza las
características del dibujo
técnico en base a
estándares ANSI y las
aplica al software de
diseño.
ATRIBUTOS DE LA
COMPETENCIA:
Obtiene información
acerca de los estándares
Apertura:
El docente:
Presenta el módulo
mencionando nombre,
justificación,
competencias de
ingreso, duración y
resultado de
aprendizaje.
Recupera conocimientos
y experiencias previos a
Conocimiento
Cuestionario
Resumen
Diagnóstica:
Heteroevaluación
GUÍA DIDÁCTICA DEL SUBMÓDULO I

para dibujo técnico.
Obtiene información
acerca de las tolerancias
que rigen un dibujo.
Investiga los tipos de
tolerancias (geométrica y
de forma).
Investiga la elaboración
de elipses en los
diferentes tipos de
perspectivas.
Aplica las normas
vigentes que rigen al
dibujo técnico.
SABERES DE LA
COMPETENCIA:
Elaboración de planos a
mano alzada.
Tipos de líneas.
Formas de las líneas,
circulo, elipse,
paralelogramo.
Tolerancias geométricas.
través de una
evaluación diagnóstica.
Promueve la integración
grupal y la
comunicación.
Identifica las
expectativas de los
alumnos.
Coordina con las
diferentes academias de
interés del Componente
de Formación Básica,
con el propósito de
establecer estrategias
de apoyo para el
dominio de los aspectos
conceptuales.
Desarrollo:
Promueve una investigación
Desempeño
Formativa:

Tipos de acotaciones.
Identifica la simbología
principal en la
elaboración de planos.
Tipos de vistas (europea
y americana).
Elaboración de piezas
mecánicas, utilizando
tolerancias geométricas y
de forma.
Elaboración de piezas
mecánicas en 2D y 3D.
Tipos de perspectivas
(isométrica, caballera,
dimétrico, etc.).
Tipos de identificación de
materiales según normatividades.
bibliográfica de los fundamentos
(línea, círculo, tipos de trazado,
software para diseño mecánico),
sensibilidad y calibración de los
instrumentos de medición.
Realiza la demostración de
cómo se realiza la elaboración
de planos en estándares
europeos y americanos.
Promueve una práctica grupal
para realizar la elaboración de
dibujos a mano alzada,
utilizando normatividades para el
dibujo.
Guía de Observación
Reporte
Ejercicios
Heteroevalaución
Coevaluación
Autoevaluación

Cierre:
Realizar la retroalimentación y
proceder a la evaluación
mediante la elaboración de
piezas.
Promueve una práctica grupal
para realizar la elaboración de
dibujos a mano alzada,
utilizando las normatividades
para el dibujo técnico.
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
Sumativa:
Heteroevalaución
Autoevaluación
2. el diseño y planeación de
los planos y piezas a
Manipular software de CAD
para de fabricación de
piezas mecánicas.
ATRIBUTOS DE LA
COMPETENCIA:
Investiga y analiza el uso
de los diferentes tipos de
software para el diseño
en CAD.
Apertura:
Promueve una investigación
bibliográfica de los fundamentos
y las estructuras que conforman
el software de diseño mecánico.
Muestra el ambiente de trabajo
del software de diseño.
Coordina actividades escolares
en donde el alumno visualice lo
que puede llegara a lograr al
final de la competencia.
Realiza una evaluación
Conocimiento
Cuestionario
Resumen
Diagnóstica:
Heteroevalaución
Autoevaluación
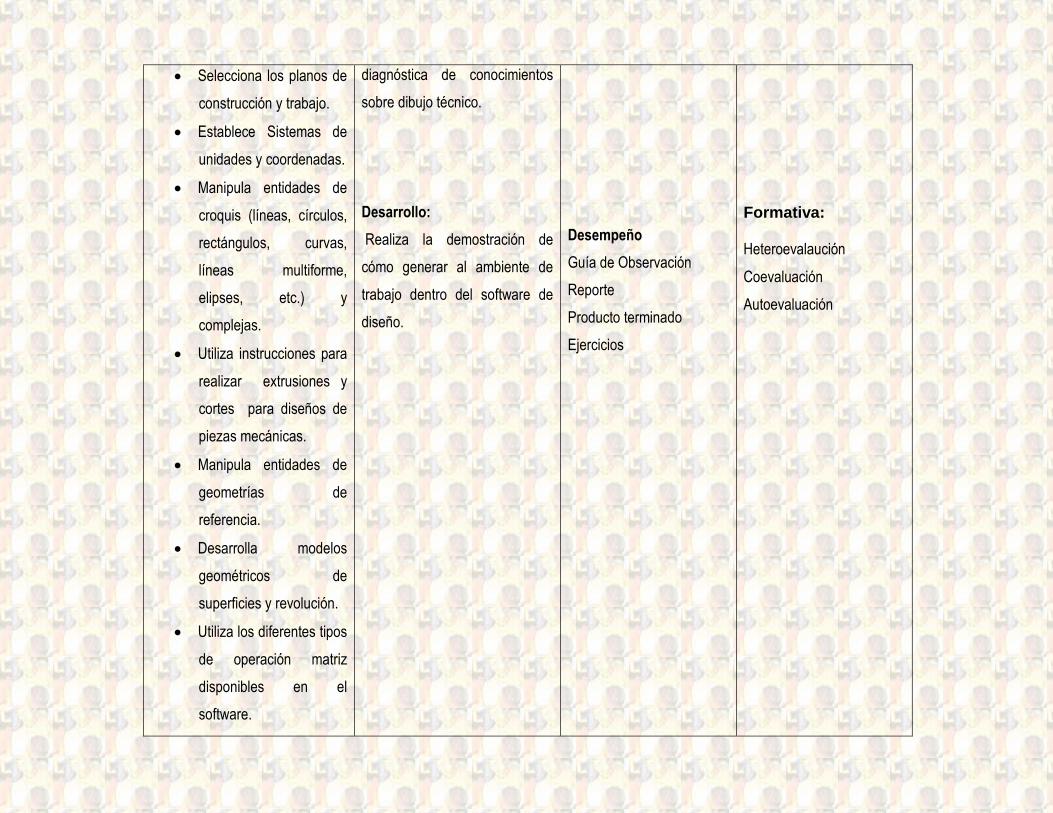
Selecciona los planos de
construcción y trabajo.
Establece Sistemas de
unidades y coordenadas.
Manipula entidades de
croquis (líneas, círculos,
rectángulos, curvas,
líneas multiforme,
elipses, etc.) y
complejas.
Utiliza instrucciones para
realizar extrusiones y
cortes para diseños de
piezas mecánicas.
Manipula entidades de
geometrías de
referencia.
Desarrolla modelos
geométricos de
superficies y revolución.
Utiliza los diferentes tipos
de operación matriz
disponibles en el
software.
diagnóstica de conocimientos
sobre dibujo técnico.
Desarrollo:
Realiza la demostración de
cómo generar al ambiente de
trabajo dentro del software de
diseño.
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
Formativa:
Heteroevalaución
Coevaluación
Autoevaluación
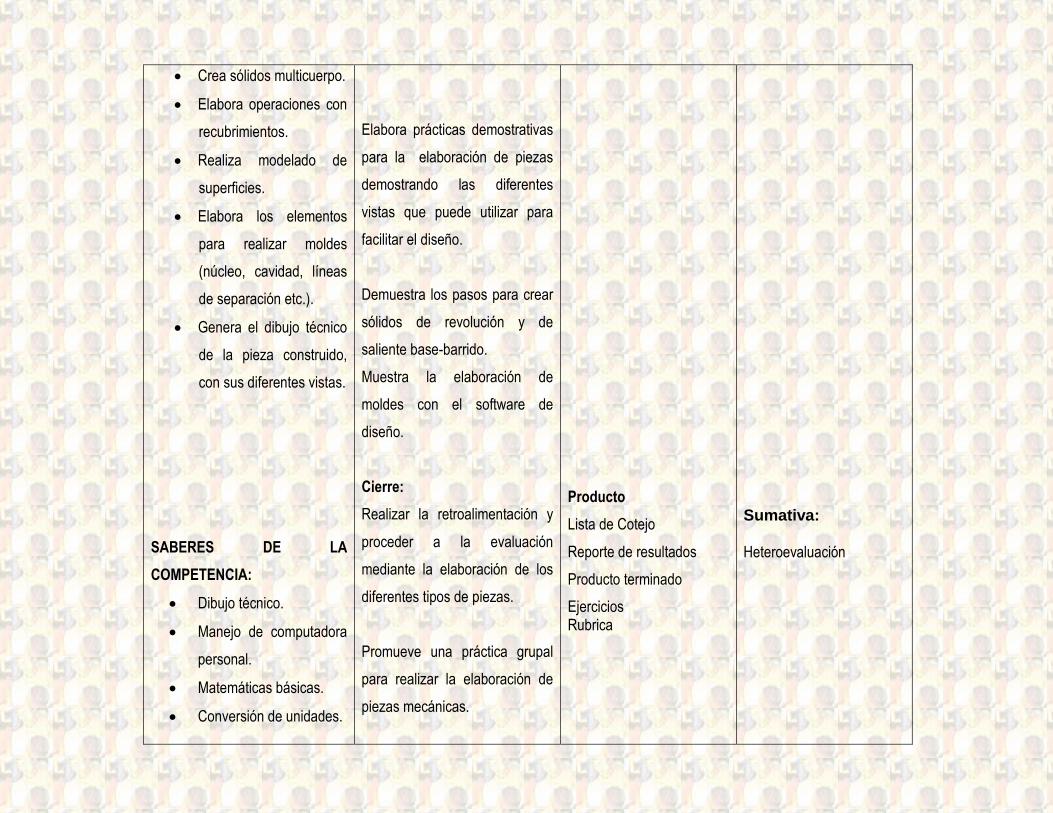
Crea sólidos multicuerpo.
Elabora operaciones con
recubrimientos.
Realiza modelado de
superficies.
Elabora los elementos
para realizar moldes
(núcleo, cavidad, líneas
de separación etc.).
Genera el dibujo técnico
de la pieza construido,
con sus diferentes vistas.
SABERES DE LA
COMPETENCIA:
Dibujo técnico.
Manejo de computadora
personal.
Matemáticas básicas.
Conversión de unidades.
Elabora prácticas demostrativas
para la elaboración de piezas
demostrando las diferentes
vistas que puede utilizar para
facilitar el diseño.
Demuestra los pasos para crear
sólidos de revolución y de
saliente base-barrido.
Muestra la elaboración de
moldes con el software de
diseño.
Cierre:
Realizar la retroalimentación y
proceder a la evaluación
mediante la elaboración de los
diferentes tipos de piezas.
Promueve una práctica grupal
para realizar la elaboración de
piezas mecánicas.
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
Sumativa:
Heteroevaluación
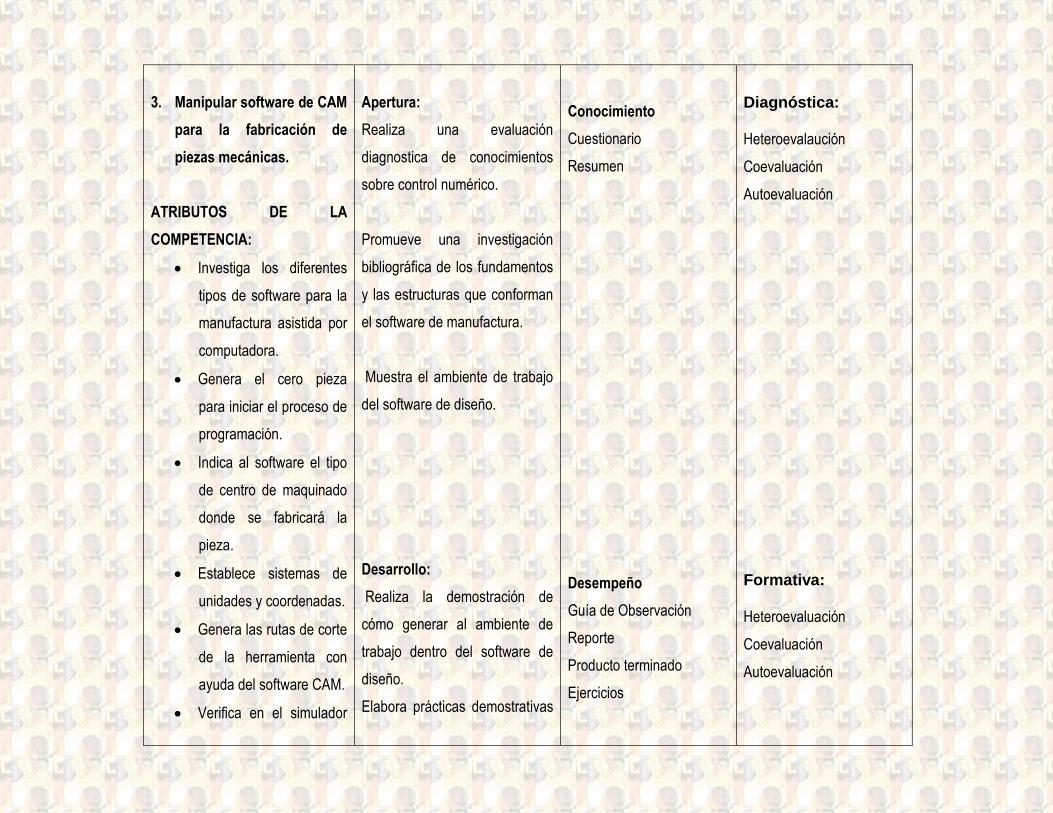
3. Manipular software de CAM
para la fabricación de
piezas mecánicas.
ATRIBUTOS DE LA
COMPETENCIA:
Investiga los diferentes
tipos de software para la
manufactura asistida por
computadora.
Genera el cero pieza
para iniciar el proceso de
programación.
Indica al software el tipo
de centro de maquinado
donde se fabricará la
pieza.
Establece sistemas de
unidades y coordenadas.
Genera las rutas de corte
de la herramienta con
ayuda del software CAM.
Verifica en el simulador
Apertura:
Realiza una evaluación
diagnostica de conocimientos
sobre control numérico.
Promueve una investigación
bibliográfica de los fundamentos
y las estructuras que conforman
el software de manufactura.
Muestra el ambiente de trabajo
del software de diseño.
Desarrollo:
Realiza la demostración de
cómo generar al ambiente de
trabajo dentro del software de
diseño.
Elabora prácticas demostrativas
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
Diagnóstica:
Heteroevalaución
Coevaluación
Autoevaluación
Formativa:
Heteroevaluación
Coevaluación
Autoevaluación

las rutas de corte de la
herramienta.
Investiga y verifica las
velocidades de la
herramienta según la
librería del software y las
características de la
máquina y herramientas.
Genera el programa de
control numérico
seleccionando la
máquina adecuada
dependiendo de la forma
de la pieza.
Transfiere el programa
de control numérico
generado al centro de
maquinado.
Realiza la depuración del
código de control
numérico obtenido por el
software de manufactura
de ser necesario.
Sujeta el material en
para la fabricación de piezas en
el software de diseño.
El profesor muestra la
transferencia del programa de
control numérico obtenido del
software con las condiciones de
transferencia del centro de
maquinado y por la vía que lo
requiera.
Verifica el programa de control
numérico obtenido en el
simulador.
Realiza la prueba en vacío del
programa de control numérico
una vez sujetada la pieza en el
centro de maquinado.
Cierre:
Realizar la retroalimentación y
proceder a la evaluación
mediante la fabricación de las
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
Sumativa:
Heteroevalaución
Autoevaluación
.
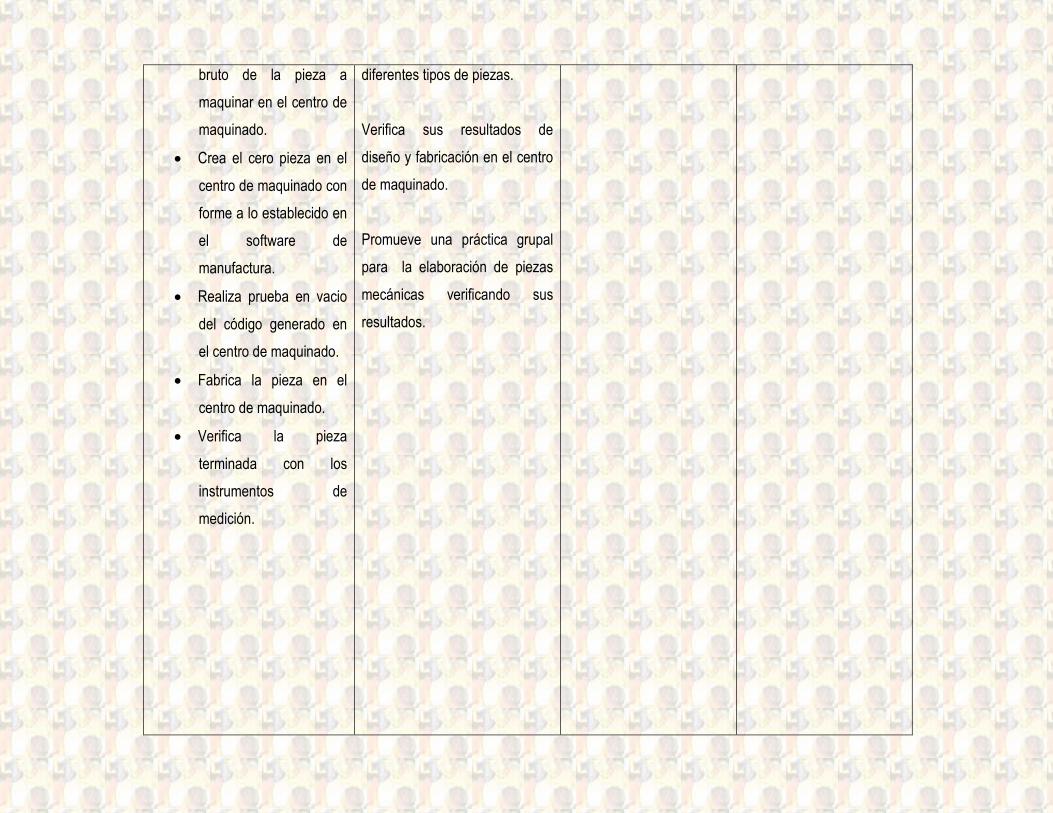
bruto de la pieza a
maquinar en el centro de
maquinado.
Crea el cero pieza en el
centro de maquinado con
forme a lo establecido en
el software de
manufactura.
Realiza prueba en vacio
del código generado en
el centro de maquinado.
Fabrica la pieza en el
centro de maquinado.
Verifica la pieza
terminada con los
instrumentos de
medición.
diferentes tipos de piezas.
Verifica sus resultados de
diseño y fabricación en el centro
de maquinado.
Promueve una práctica grupal
para la elaboración de piezas
mecánicas verificando sus
resultados.

SABERES DE LA
COMPETENCIA:
Dibujo técnico.
Velocidades de
corte.
Máquinas de
control numérico.
Herramientas.
Control
numérico.
Metrología.
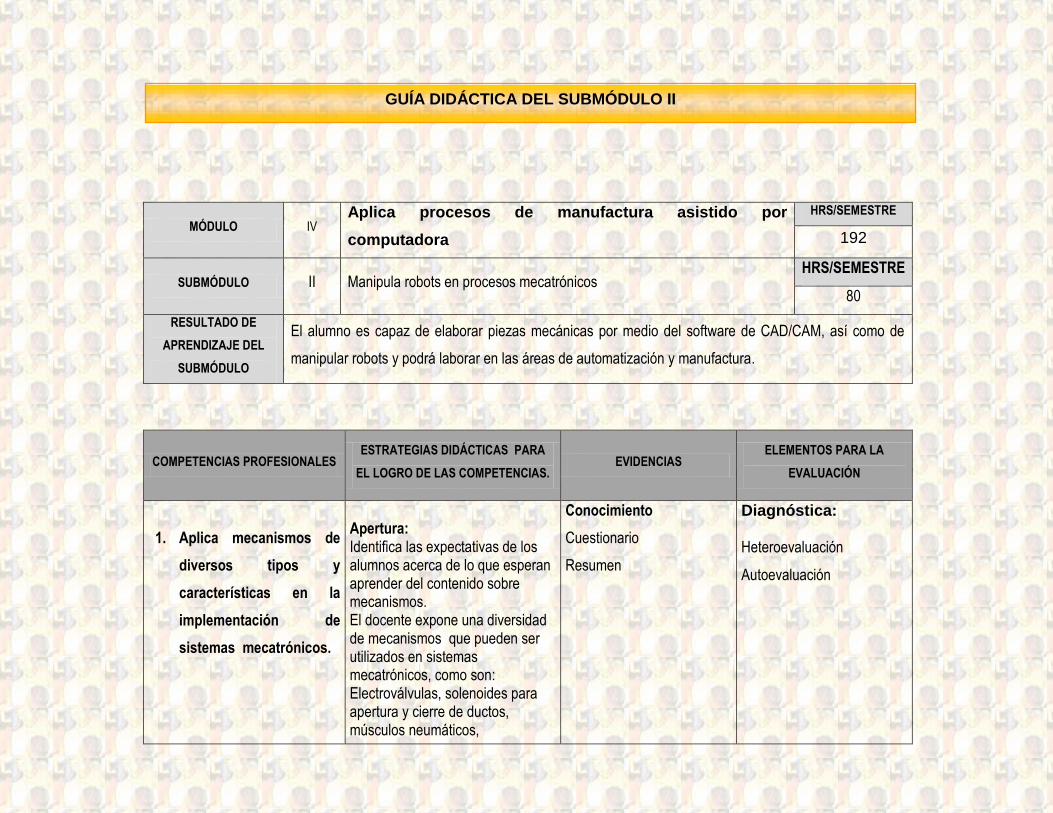
MÓDULO IV Aplica procesos de manufactura asistido por
computadora
HRS/SEMESTRE
192
SUBMÓDULO II Manipula robots en procesos mecatrónicos HRS/SEMESTRE
80
RESULTADO DE
APRENDIZAJE DEL
SUBMÓDULO
El alumno es capaz de elaborar piezas mecánicas por medio del software de CAD/CAM, así como de
manipular robots y podrá laborar en las áreas de automatización y manufactura.
COMPETENCIAS PROFESIONALES ESTRATEGIAS DIDÁCTICAS PARA
EL LOGRO DE LAS COMPETENCIAS. EVIDENCIAS
ELEMENTOS PARA LA
EVALUACIÓN
1. Aplica mecanismos de
diversos tipos y
características en la
implementación de
sistemas mecatrónicos.
Apertura: Identifica las expectativas de los alumnos acerca de lo que esperan aprender del contenido sobre mecanismos. El docente expone una diversidad de mecanismos que pueden ser utilizados en sistemas mecatrónicos, como son: Electroválvulas, solenoides para apertura y cierre de ductos, músculos neumáticos,
Conocimiento
Cuestionario
Resumen
Diagnóstica:
Heteroevaluación
Autoevaluación
GUÍA DIDÁCTICA DEL SUBMÓDULO II

ATRIBUTOS DE LA
COMPETENCIA:
• Realiza acoplamiento de
mecanismos.
• Determinar componentes de
un mecanismo.
• Determina grados de libertad
del mecanismo.
• Aplicar mecanismos para
transferencia de movimiento.
SABERES DE LA
COMPETENCIA:
• Componentes de un
mecanismo.
• Tipos de mecanismos.
• Cadena cinemática.
electroimanes, engranes, etc El alumno elabora un resumen, haciendo énfasis en la forma en que pueden ser usados. El profesor pide investigar cómo se acoplan las máquinas, cuántos tipos de acoplamientos existen y dónde se usan. Desarrollo:
El docente proyecta en video,
mecanismos que comprenden los
principales tipos de articulaciones
como son: biela, manivela,
corredera, etc.
En un foro organizado en el aula
se discute qué acoplamientos entre
eslabones permiten la movilidad de
las máquinas, cuales son los
grados de libertad de un arreglo
eslabonado, y con qué fuente de
fuerza motriz es puesto en
movimiento.
El docente realiza una visita
Desempeño
Guía de Observación
Reportes
Ejercicios
Formativa:
Heteroevaluación
Coevaluación
Autoevaluación

industrial para observar los
diferentes medios de transmisión
de movimientos como son: polea-
banda, Catarina-cadena,
acoplamiento directo, por cilindros
neumáticos o hidráulicos, etc.
El alumno realiza un reporte en el
que enumera los tipos de
transmisión conocidos.
Cierre:
Prepara y aplica la practica
integradora para entender el
funcionamiento de os mecanismos
El alumno diseña un mecanismo
de grados de libertad conocidos
por él, que es puesto en marcha
por cilindros neumáticos o
hidráulicos, controlados por PLC.
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
Sumativa:
Heteroevaluación
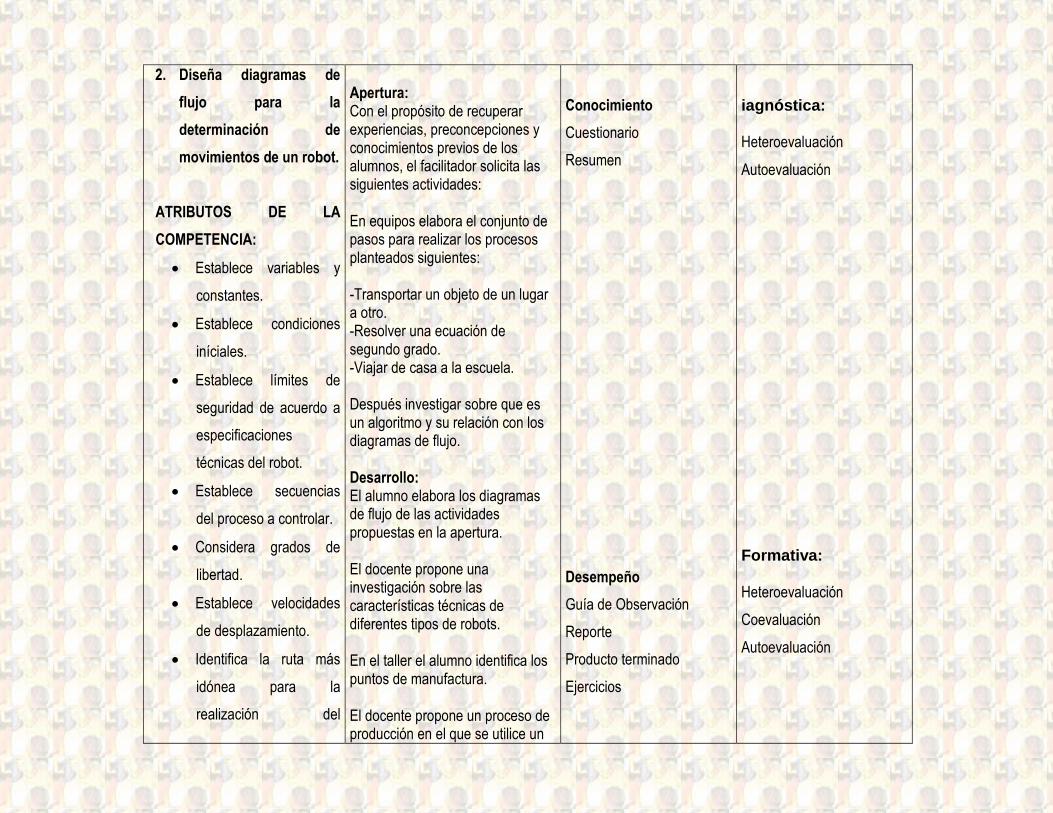
2. Diseña diagramas de
flujo para la
determinación de
movimientos de un robot.
ATRIBUTOS DE LA
COMPETENCIA:
Establece variables y
constantes.
Establece condiciones
iníciales.
Establece límites de
seguridad de acuerdo a
especificaciones
técnicas del robot.
Establece secuencias
del proceso a controlar.
Considera grados de
libertad.
Establece velocidades
de desplazamiento.
Identifica la ruta más
idónea para la
realización del
Apertura: Con el propósito de recuperar experiencias, preconcepciones y conocimientos previos de los alumnos, el facilitador solicita las siguientes actividades: En equipos elabora el conjunto de pasos para realizar los procesos planteados siguientes: -Transportar un objeto de un lugar a otro. -Resolver una ecuación de segundo grado. -Viajar de casa a la escuela. Después investigar sobre que es un algoritmo y su relación con los diagramas de flujo. Desarrollo: El alumno elabora los diagramas de flujo de las actividades propuestas en la apertura. El docente propone una investigación sobre las características técnicas de diferentes tipos de robots. En el taller el alumno identifica los puntos de manufactura. El docente propone un proceso de producción en el que se utilice un
Conocimiento
Cuestionario
Resumen
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
iagnóstica:
Heteroevaluación
Autoevaluación
Formativa:
Heteroevaluación
Coevaluación
Autoevaluación

movimiento
considerando
obstáculos permanentes
y temporales.
Localiza los puntos de
manufactura, como son:
almacén, módulos de
inspección, censado y
transporte.
Utiliza simbología de los
diagramas de flujo.
Verifica que el diagrama
planteado cumpla con
todas las condiciones
del proceso.
SABERES DE LA
COMPETENCIA:
Sensores y actuadores.
Simbología de
diagramas de flujo.
robot para que el alumno establezca: -Secuencia de trabajo. -Velocidades de desplazamiento. -La ruta idónea para su ejecución. -El diagrama de flujo. Recrea simulaciones de situaciones donde el robot realiza varios procesos y fallas para efectuar correcciones de posiciones y de programa para realimentar los conocimientos de robótica. Con la finalidad de introducir los nuevos conocimientos científicos y técnicos, relacionarlos con los identificados y recuperados en las actividades de apertura, el facilitador solicitará a los alumnos que realicen las actividades siguientes: -Identifica los grados de libertad del robot. -Determina las limitaciones técnicas del robot. -Desarrolla el algoritmo y el diagrama de flujo, para realizar el transporte de un objeto considerando obstáculos y variables.

Elementos mecánicos
Ciclos de programación
Electrónica digital
Cierre:
Prepara y aplica la practica
integradora para la operación y
programación de un robot en un
sistema mecatrónico
Solicita la integración del portafolio
de evidencias para la
sistematización y valoración de las
evidencias de desempeño,
producto y conocimiento del
contenido
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
Sumativa:
Heteroevaluación
3. Utiliza lenguajes de
programación para el
control de movimientos de
un robot.
ATRIBUTOS DE LA
COMPETENCIA
Realiza movimientos del
Apertura: Con el propósito de recuperar experiencias, preconcepciones y conocimientos previos de los alumnos, el facilitador solicita que: Investiguen acerca del lenguaje de programación (el que aplique). Conviertan diagramas de flujo a lenguaje de programación. Identifiquen en el software de simulación las posibilidades de movimientos.
Conocimiento
Cuestionario
Resumen
Diagnóstica:
Heteroevaluación
Autoevaluación

robot de forma manual.
Establece coordenadas
de forma manual.
Graba posiciones según
el proceso a ejecutar
Realiza el programa de
control en el lenguaje
que aplique.
Edita el programa.
Modifica el programa.
Simula el programa de
control generado.
Depura el programa de
control.
Verifica el programa de
control dentro de un
proceso de
manufactura.
Realiza ajustes finales
de operación.
Respalda programas
desde el robot hacia
medios magnéticos,
electrónicos e impresos
Desarrollo:
El docente diseña actividades para
que el alumno desarrolle
habilidades y destrezas en :
Utilizar software de simulación (el
que aplique) donde realice:
Edición.
Modificación.
Compilación del programa.
Mediante una demostración, el
docente explica el proceso para:
Ejecutar movimientos del robot en
forma manual.
Grabar posiciones para la
ejecución de un programa.
Descargar un programa de la PC al
controlador del robot (si aplica).
Ejecutar el programa en un
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
Formativa:
Heteroevaluación
Coevaluación
Autoevaluación

o el que aplique.
Ejecuta el programa de
control.
Controla el robot por señas o
medios externos
SABERES DE LA
COMPETENCIA:
.
Sistemas de
coordenadas.
Grados de libertad.
Interpolación de
movimientos.
Sistemas de operación
Conexiones externas del
robot
proceso.
Cierre:
Con la finalidad de introducir los
nuevos conocimientos científicos y
técnicos para relacionarlos con los
identificados y recuperados en las
actividades de apertura, el
facilitador solicita a los alumnos
realicen una práctica integradora
en la que el alumno demuestra:
Desarrollo de programas a
partir de diagramas de
flujo.
Selección del lenguaje de
programación para realizar
la tarea.
Considera las variables del
sistema
Simula el proceso por
computadora
Configura el robot de forma manual
y descargar el programa.
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
Sumativa:
Heteroevaluación
Autoevaluación

Noviembre 2010
PPRROOGGRRAAMMAA DDEE EESSTTUUDDIIOO
TTééccnniiccoo eenn MMeeccaattrróónniiccaa
Módulo V
Opera y realiza el mantenimiento a sistemas Mecatrónicos
RREEFFOORRMMAA IINNTTEEGGRRAALL DDEE LLAA EEDDUUCCAACCIIÓÓNN MMEEDDIIAA SSUUPPEERRIIOORR

El quinto módulo, está orientado a que el alumno adquiera las competencias necesarias para
operar y realizar mantenimiento a sistemas mecatrónicos, estas actividades pretenden
mantener el equipo en disponibilidad para su operación y alargar su vida útil. De la misma
manera, integra los conocimientos adquiridos a lo largo de su carrera en la implementación
en una celda automatizada o el diseño de un prototipo mecatrónico.
En este módulo el alumno genera rutinas de mantenimiento preventivo y predictivo mediante
diferentes tipos de análisis cualitativos que reflejen el estado de los dispositivos, además
atiende mantenimientos correctivos emergentes.
Las competencias adquiridas en los diferentes módulos le proporcionan las herramientas
necesarias para diagnosticar el estado de dispositivos eléctricos, electrónicos y mecánicos
para tomar decisiones precisas con respecto al mantenimiento, entre las cuales pueden ser
ajustes, reparación o reemplazo de componentes
Para concluir, el presente módulo pretende que el estudiante integre y aplique las habilidades
y destrezas adquiridas en los cuatro módulos precedentes y el submódulo I del módulo V
mediante el diseño y construcción de un prototipo mecatrónico que de solución a
necesidades del sector productivo y/o social, y el diseño y operación de una celda de
manufactura.
DESCRIPCIÓN DEL MÓDULO V
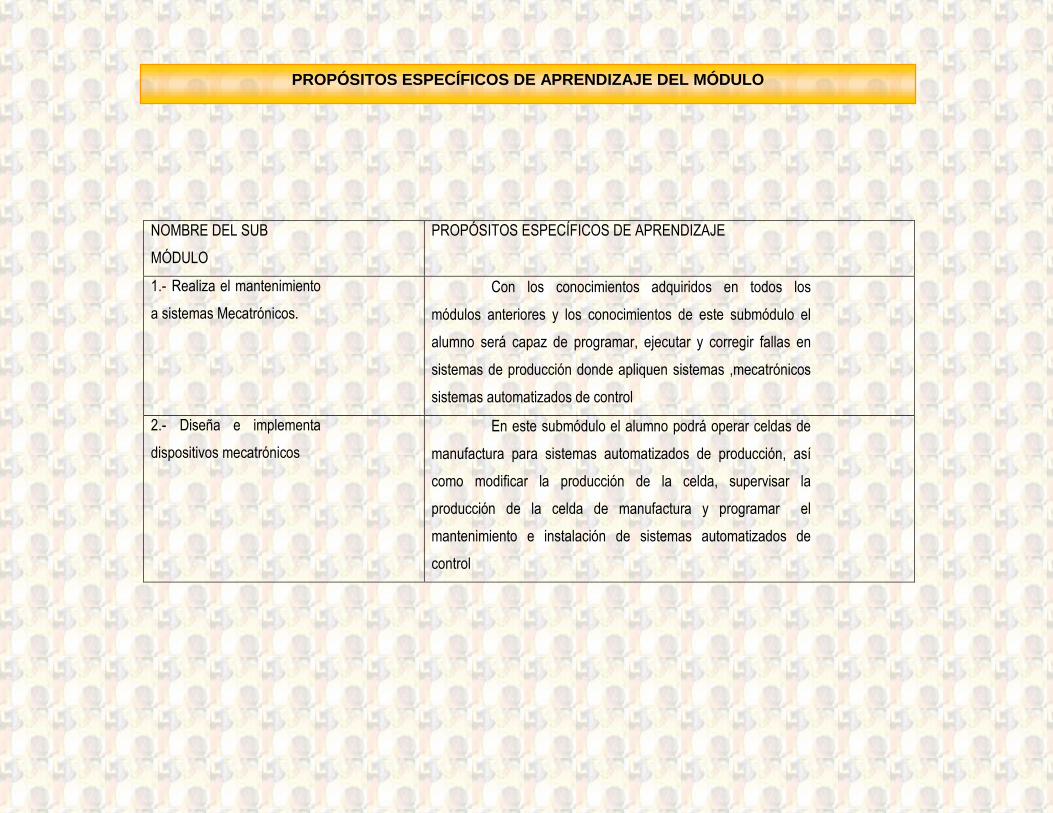
NOMBRE DEL SUB
MÓDULO
PROPÓSITOS ESPECÍFICOS DE APRENDIZAJE
1.- Realiza el mantenimiento
a sistemas Mecatrónicos.
Con los conocimientos adquiridos en todos los
módulos anteriores y los conocimientos de este submódulo el
alumno será capaz de programar, ejecutar y corregir fallas en
sistemas de producción donde apliquen sistemas ,mecatrónicos
sistemas automatizados de control
2.- Diseña e implementa
dispositivos mecatrónicos
En este submódulo el alumno podrá operar celdas de
manufactura para sistemas automatizados de producción, así
como modificar la producción de la celda, supervisar la
producción de la celda de manufactura y programar el
mantenimiento e instalación de sistemas automatizados de
control
PROPÓSITOS ESPECÍFICOS DE APRENDIZAJE DEL MÓDULO
Para el Bachillerato Tecnológico, cada docente es responsable de las actividades que se desarrollan en el aula,
laboratorio o taller, que favorecen el desarrollo de aprendizajes basados en competencias, por lo que su trabajo es
facilitar el conocimiento de tal forma que trasciendan las prácticas tradicionales de enseñanza para que adopte un
enfoque centrado en el aprendizaje de los diferentes contextos a través del constructivismo. Por lo que en este
apartado encontrarás recomendaciones para el aprovechamiento de los Programas de Estudios del componente
profesional tales como:
Uso de las guías didácticas como mecanismo pedagógico en el proceso de formación y en el avance que te
facilitará la integración de contenidos, estrategias didácticas, material y equipo de apoyo, evidencias e
instrumentos.
Observarás que los submódulos expresan el desarrollo de competencias mediante los atributos que requiere el
sector productivo, lo cual te arroja un resultado de aprendizaje.
Establecer como puente entre los saberes y las experiencias previas de los alumnos, los contenidos que están
redactados en términos de competencias en respuesta al contexto laboral y social.
En las competencias profesionales se van disgregando cada uno de los atributos para obtener la competencia.
Las propuestas de competencias genéricas y sus atributos permiten relacionar dentro del proceso de aprendizaje
su aplicación para la vida y vincularlas en espacios laborales de cualquier contexto.
Las estrategias didácticas ofrecen posibilidades para seleccionar actividades necesarias con base en las
condiciones particulares de entidad y plantel, así como las características particulares de los alumnos. Se
encuentra en tres momentos: apertura, desarrollo y cierre relacionando el resultado de aprendizaje.
A partir de estas etapas de construcción de los aprendizajes, se sugiere el uso de los recursos de apoyo (material y
equipo) para el estudio y ejercitación de los contenidos formativos.
Para facilitar la tarea de evaluación se sugieren mecanismos de apoyo como las evidencias e instrumentos de
evaluación que refieren desempeños, productos y conocimientos que se logran a partir del estudio y ejercitación
de los contenidos.
Para el desarrollo de los saberes de la competencia es necesario identificar los conocimientos que en conjunto
con los atributos de la competencias van a adquirir los alumnos.
MÉTODOS Y ACTIVIDADES PARA ALCANZAR LOS PROPÓSITOS DE APRENDIZAJE DEL
MÓDULO

Para el área de Mecatrónica las tecnologías de la información y la comunicación son muy importantes ya que la mayoría de los procesos y control de una celda de manufactura se realizan con una computadora es por eso que al alumno en este modulo le ayudaran a:
Buscar la información necesaria en la internet
Diseñar celdas de manufactura en el software CIM
Simular procesos de manufactura
Crear procesos de manufactura
Supervisar procesos de manufactura Con todo esto la enseñanza de los procesos de manufactura es más simple, mejor entendible y se pueden tener varios equipos para la impartición de las clases con los simuladores de producción.
DESARROLLO DIDÁCTICO DE LAS TECNOLOGÍAS DE LA INFORMACIÓN Y LA COMUNICACIÓN
EN EL MÓDULO

El curso abarca competencias que en particular, requiere de conocimientos previos que el alumno debe poseer al tomar el curso.
Lógica matemática es de vital importancia para lograr un aprendizaje significativo el cuál se puede lograr mediante estrategias
didácticas que encaminen a desarrollar esta habilidad y a relacionarla con su especialidad y en específico con este modulo.
El uso de las tecnologías de la información ayudan al alumno a superarse día a día y aprender por iniciativa propia ya que la
mayoría de los simuladores de este modulo son de un gran avance tecnológico y le fomentan un gran interés al alumno.
El curso abarca relevantemente el uso de coordenadas en el espacio manipulación de autómatas, programación y expresa el
funcionamiento de maquinas herramientas e interpretara planos y diagramas, los cuales forman parte del sistema mecatrónico
que el alumno debe manipular y creara innovaciones que lo motivaran a superarse y lograr sus metas personales.
Por otra parte, el alumno realiza investigaciones que lo forzan a desarrollar la habilidad de investigar y comprender una lectura. El
alumno debe hacer uso de las técnicas de lectura y redacción adquiridas durante su formación académica para formular trabajos
de acuerdo a las necesidades.
RECOMENDACIONES ACADÉMICAS PARA TRABAJO INTERDISCIPLINARIO EN EL LOGRO DE
LAS COMPETENCIAS GENÉRICAS
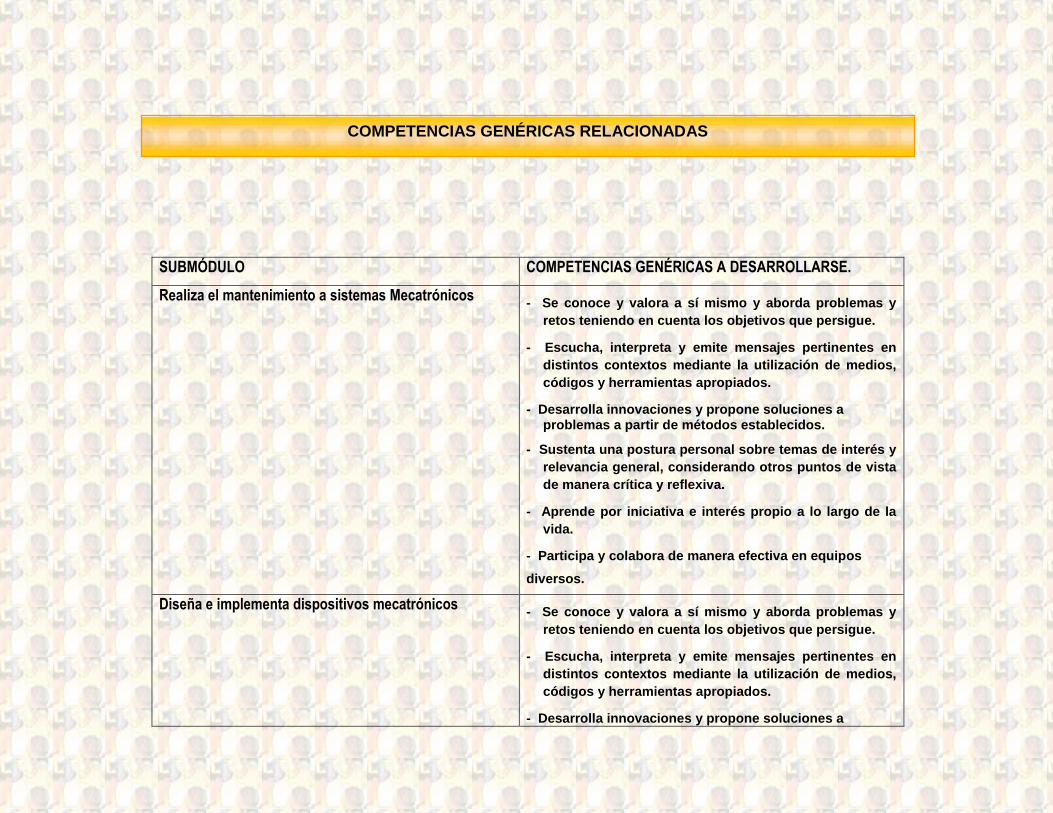
SUBMÓDULO COMPETENCIAS GENÉRICAS A DESARROLLARSE.
Realiza el mantenimiento a sistemas Mecatrónicos - Se conoce y valora a sí mismo y aborda problemas y
retos teniendo en cuenta los objetivos que persigue.
- Escucha, interpreta y emite mensajes pertinentes en
distintos contextos mediante la utilización de medios,
códigos y herramientas apropiados.
- Desarrolla innovaciones y propone soluciones a problemas a partir de métodos establecidos.
- Sustenta una postura personal sobre temas de interés y
relevancia general, considerando otros puntos de vista
de manera crítica y reflexiva.
- Aprende por iniciativa e interés propio a lo largo de la
vida.
- Participa y colabora de manera efectiva en equipos
diversos.
Diseña e implementa dispositivos mecatrónicos - Se conoce y valora a sí mismo y aborda problemas y
retos teniendo en cuenta los objetivos que persigue.
- Escucha, interpreta y emite mensajes pertinentes en
distintos contextos mediante la utilización de medios,
códigos y herramientas apropiados.
- Desarrolla innovaciones y propone soluciones a
COMPETENCIAS GENÉRICAS RELACIONADAS

problemas a partir de métodos establecidos.
- Sustenta una postura personal sobre temas de interés y
relevancia general, considerando otros puntos de vista
de manera crítica y reflexiva.
- Aprende por iniciativa e interés propio a lo largo de la
vida.
- Participa y colabora de manera efectiva en equipos
diversos.
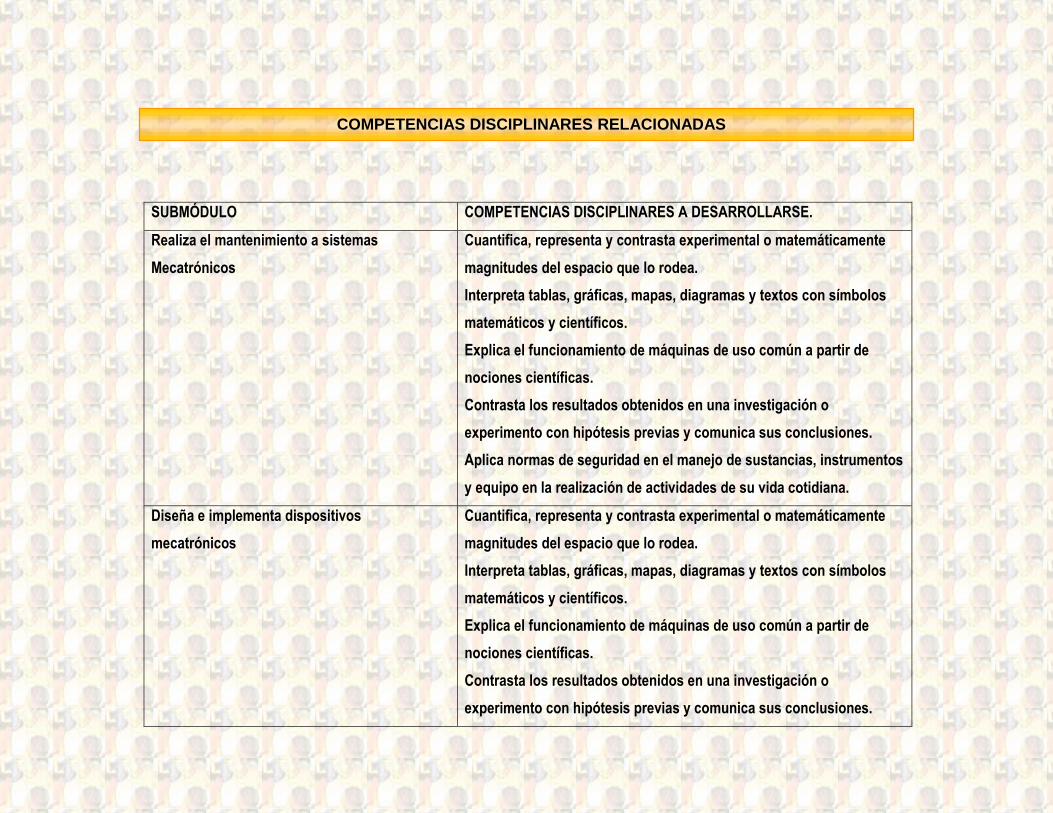
SUBMÓDULO COMPETENCIAS DISCIPLINARES A DESARROLLARSE.
Realiza el mantenimiento a sistemas
Mecatrónicos
Cuantifica, representa y contrasta experimental o matemáticamente
magnitudes del espacio que lo rodea.
Interpreta tablas, gráficas, mapas, diagramas y textos con símbolos
matemáticos y científicos.
Explica el funcionamiento de máquinas de uso común a partir de
nociones científicas.
Contrasta los resultados obtenidos en una investigación o
experimento con hipótesis previas y comunica sus conclusiones.
Aplica normas de seguridad en el manejo de sustancias, instrumentos
y equipo en la realización de actividades de su vida cotidiana.
Diseña e implementa dispositivos
mecatrónicos
Cuantifica, representa y contrasta experimental o matemáticamente
magnitudes del espacio que lo rodea.
Interpreta tablas, gráficas, mapas, diagramas y textos con símbolos
matemáticos y científicos.
Explica el funcionamiento de máquinas de uso común a partir de
nociones científicas.
Contrasta los resultados obtenidos en una investigación o
experimento con hipótesis previas y comunica sus conclusiones.
COMPETENCIAS DISCIPLINARES RELACIONADAS

Aplica normas de seguridad en el manejo de sustancias, instrumentos
y equipo en la realización de actividades de su vida cotidiana.
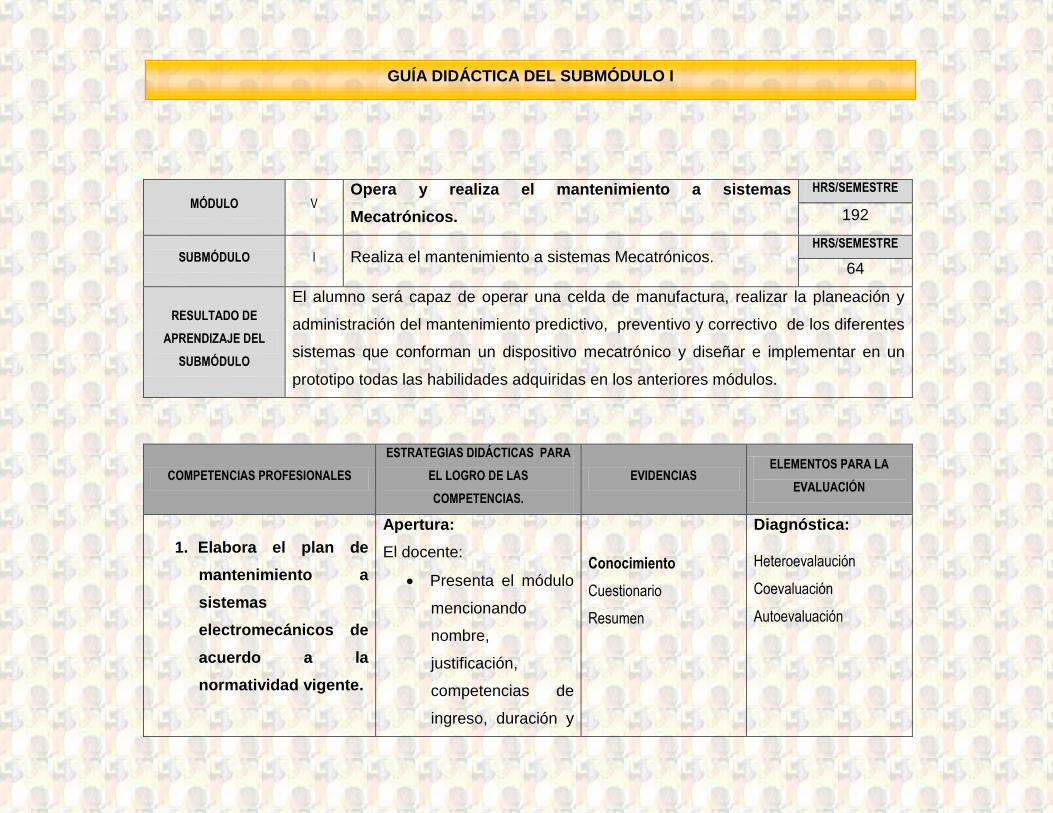
MÓDULO V Opera y realiza el mantenimiento a sistemas
Mecatrónicos.
HRS/SEMESTRE
192
SUBMÓDULO I Realiza el mantenimiento a sistemas Mecatrónicos. HRS/SEMESTRE
64
RESULTADO DE
APRENDIZAJE DEL
SUBMÓDULO
El alumno será capaz de operar una celda de manufactura, realizar la planeación y
administración del mantenimiento predictivo, preventivo y correctivo de los diferentes
sistemas que conforman un dispositivo mecatrónico y diseñar e implementar en un
prototipo todas las habilidades adquiridas en los anteriores módulos.
COMPETENCIAS PROFESIONALES
ESTRATEGIAS DIDÁCTICAS PARA
EL LOGRO DE LAS
COMPETENCIAS.
EVIDENCIAS ELEMENTOS PARA LA
EVALUACIÓN
1. Elabora el plan de
mantenimiento a
sistemas
electromecánicos de
acuerdo a la
normatividad vigente.
Apertura:
El docente:
Presenta el módulo
mencionando
nombre,
justificación,
competencias de
ingreso, duración y
Conocimiento
Cuestionario
Resumen
Diagnóstica:
Heteroevalaución
Coevaluación
Autoevaluación
GUÍA DIDÁCTICA DEL SUBMÓDULO I

ATRIBUTOS DE LA
COMPETENCIA:
Planea el mantenimiento de
acuerdo con la información
técnica y la solicitud de
intervención.
Utiliza los instrumentos de
medición.
Selecciona la herramienta
adecuada al tipo de
mantenimiento que va a
realizar.
Programa el
mantenimiento a sistemas
electromecánicos de
acuerdo a la normatividad
vigente, como son:
• Sistema Eléctrico:
• Interruptores de
media tensión.
• Interruptores de
potencia.
• Interruptores de baja
resultado de
aprendizaje.
Recupera
conocimientos y
experiencias
previos a través de
una evaluación
diagnóstica.
Promueve la
integración grupal y
la comunicación.
Identifica las
expectativas de los
alumnos.
Coordina con las
diferentes
academias de
interés del
Componente de
Formación Básica,
con el propósito de

tensión.
• Contactores y
relevadores, (de tiempo
y conteo).
• Generadores y
Motores eléctricos,
servomotores.
• Interruptores de
Posición, Presión,
Nivel, Flujo.
• Arrancadores.
• Interruptores de sobre
carga.
• Sistema Mecánico:
• Bandas, catarinas.
• Rodamientos.
• Retenes y sellos.
• Poleas, cadenas.
• Juntas.
• Engranes, flechas.
• Mecanismos.
•Acoplamientos,
embragues.
• Lubricantes.
establecer
estrategias de
apoyo para el
dominio de los
aspectos
conceptuales.
Coordina
actividades en
donde el alumno
visualice lo que
puede llegar a
lograr al final de la
competencia y/o
contenido a
desarrollar.
Invita a expertos de
la materia a impartir
conferencias para
explicar como se
lleva a cabo el
mantenimiento y su
importancia en la
industria.

• Refrigerantes.
Sistema Neumático.
Válvulas.
Cilindros.
Compresores.
Tanque de
almacenamiento.
Unidades de
mantenimiento.
Motores.
Líneas de
distribución.
Conexiones.
Sistema Hidráulico:
Válvulas.
Cilindros.
Bombas.
Tanque de
almacenamiento.
Intercambiadores
de calor.
Motores.
Líneas de
distribución.
Desarrollo:
Promueve una
investigación bibliográfica
de los fundamentos del
mantenimiento, realizable
a equipo electromecánico.
Efectúa ejercicios
prácticos para enfatizar la
planeación del
mantenimiento aplicando
la motivación, supervisión
y toma de decisiones
.
Efectúa ejercicios
prácticos para analizar el
método de un caso en el
desarrollo de la planeación
de un mantenimiento
integral.
Integra el portafolio de
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
Formativa:
Heteroevalaución
Coevaluación
Autoevaluación

Conexiones.
Controla la información
técnica de mantenimiento de
acuerdo a la normatividad y
los procedimientos
establecidos.
• Aplica los
requerimientos de seguridad
e higiene con base en la
normatividad vigente.
• Responde a las
emergencias de acuerdo a
los procedimientos
establecidos por los
elementos del sistema
electromecánico.
• Llena bitácoras de
mantenimiento.
evidencias para sustentar
la competencia adquirida.
Cierre:
Prepara y aplica la
práctica integradora para
incluir en un mismo
documento los diferentes
preventivos que se
realizan que se realizan a
un sistema mecatrónico.
Realiza actividades de
retroalimentación y
evaluación
correspondientes para
verificar el resultado de
aprendizaje y le hace ver
al alumno los logros
obtenidos.
Solicita la integración del
portafolio de evidencias
para la sistematización y
la valoración de las
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
Sumativa:
Heteroevalaución
Coevaluación
Autoevaluación

SABERES DE LA
COMPETENCIA:
Metrología
Nomenclatura y
simbología de
diagramas eléctricos,
neumáticos e
hidráulicos.
Tipos de
mantenimiento.
Interpretación de
manuales de
mantenimiento de
elementos
mecatrónicos.
evidencias de desempeño,
producto y conocimiento
del contenido.

2. Elabora el plan de
mantenimiento a
sistemas electrónicos
de acuerdo a políticas
de la empresa.
ATRIBUTOS DE LA
COMPETENCIA:
Planea el mantenimiento de
acuerdo con la información
técnica y la solicitud de
intervención.
Utiliza los instrumentos de
medición.
Selecciona la herramienta
adecuada al tipo de
mantenimiento que va a
realizar.
Programa el
mantenimiento a
sistemas electrónicos
de acuerdo a la
normatividad vigente,
Apertura:
El docente:
Presenta el módulo
mencionando
nombre,
justificación,
competencias de
ingreso, duración y
resultado de
aprendizaje.
Recupera
conocimientos y
experiencias
previos a través de
una evaluación
diagnóstica.
Promueve la
integración grupal y
la comunicación.
Identifica las
expectativas de los
alumnos.
Coordina con las
Conocimiento
Cuestionario
Resumen
Diagnóstica:
Heteroevalaución
Coevaluación
Autoevaluación

como son:
• Sistemas
electrónicos
analógicos:
• Sensores y
transductores.
• Fuentes de
alimentación.
• Elementos de
protección y seguridad.
• Acondicionadores de
señal.
• Sistemas
electrónicos digitales:
• Elementos de
temporización.
• Elementos de conteo.
• Elementos de
almacenamiento.
• Codificadores y
decodificadores.
•
Microprocesadores.
• Controladores Lógicos
diferentes
academias de
interés del
Componente de
Formación Básica,
con el propósito de
establecer
estrategias de
apoyo para el
dominio de los
aspectos
conceptuales.
Coordina
actividades en
donde el alumno
visualice lo que
puede llegar a
lograr al final de la
competencia y/o
contenido a
desarrollar.
Invita a expertos de
la materia a impartir
conferencias para
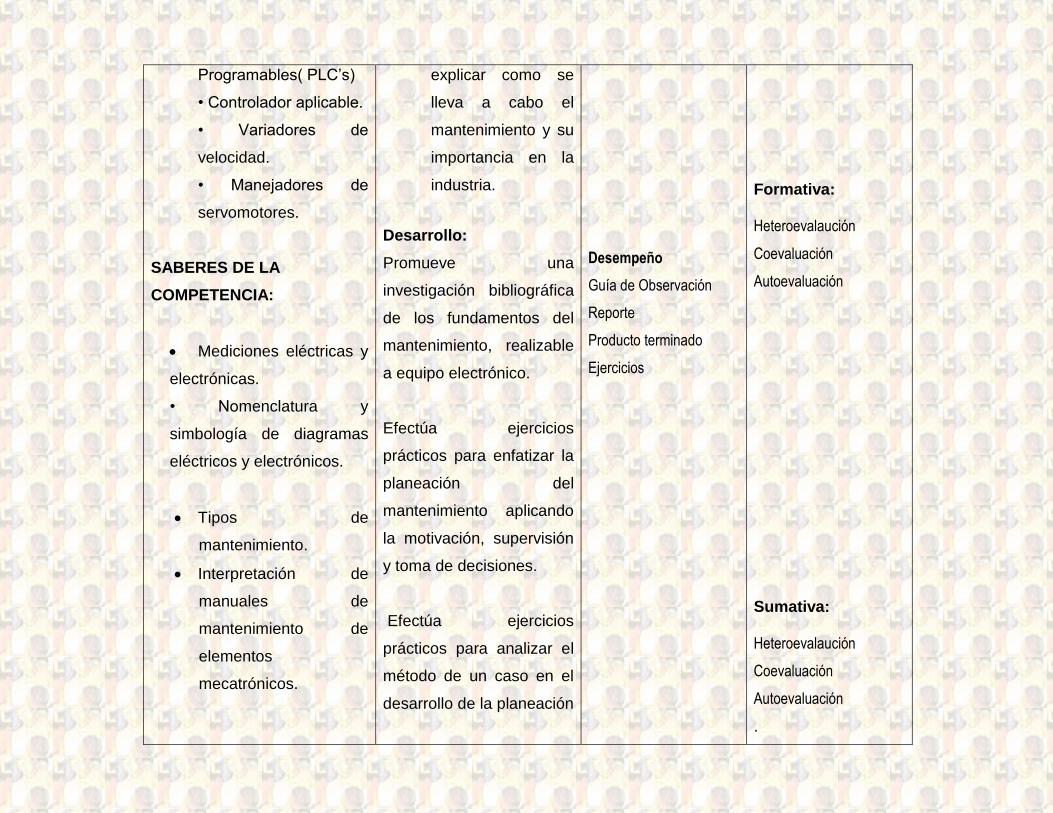
Programables( PLC’s)
• Controlador aplicable.
• Variadores de
velocidad.
• Manejadores de
servomotores.
SABERES DE LA
COMPETENCIA:
Mediciones eléctricas y
electrónicas.
• Nomenclatura y
simbología de diagramas
eléctricos y electrónicos.
Tipos de
mantenimiento.
Interpretación de
manuales de
mantenimiento de
elementos
mecatrónicos.
explicar como se
lleva a cabo el
mantenimiento y su
importancia en la
industria.
Desarrollo:
Promueve una
investigación bibliográfica
de los fundamentos del
mantenimiento, realizable
a equipo electrónico.
Efectúa ejercicios
prácticos para enfatizar la
planeación del
mantenimiento aplicando
la motivación, supervisión
y toma de decisiones.
Efectúa ejercicios
prácticos para analizar el
método de un caso en el
desarrollo de la planeación
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
Formativa:
Heteroevalaución
Coevaluación
Autoevaluación
Sumativa:
Heteroevalaución
Coevaluación
Autoevaluación
.

de un mantenimiento
integral.
Integra el portafolio de
evidencias para sustentar
la competencia adquirida.
Cierre:
Prepara y aplica la
práctica integradora para
incluir en un mismo
documento los diferentes
preventivos que se
realizan que se realizan a
un sistema electrónico.
Realiza actividades de
retroalimentación y
evaluación
correspondientes para
verificar el resultado de
aprendizaje y le hace ver
al alumno los logros
obtenidos.
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica

Solicita la integración del
portafolio de evidencias
para la sistematización y
la valoración de las
evidencias de desempeño,
producto y conocimiento
del contenido.

MÓDULO V Opera y realiza el mantenimiento a sistemas mecatrónicos HRS/SEMESTRE
192
SUBMÓDULO II Diseña e implementa dispositivos mecatrónicos HRS/SEMESTRE
128
RESULTADO DE
APRENDIZAJE DEL
SUBMÓDULO
El alumno será capaz de operar una celda de manufactura, realizar la planeación y
administración del mantenimiento predictivo, preventivo y correctivo de los diferentes
sistemas que conforman un dispositivo mecatrónico y diseñar e implementar en un
prototipo todas las habilidades adquiridas en los anteriores módulos.
COMPETENCIAS PROFESIONALES ESTRATEGIAS DIDÁCTICAS PARA
EL LOGRO DE LAS COMPETENCIAS. EVIDENCIAS
ELEMENTOS PARA LA
EVALUACIÓN
1. Identifica y opera
los elementos que
conforman una celda
de manufactura.
Apertura:
El docente:
Presenta el módulo
mencionando
nombre, justificación,
competencias de
ingreso, duración y
resultado de
Conocimiento
Cuestionario
Resumen
Diagnóstica:
Heteroevalaución
Coevaluación
Autoevaluación
GUÍA DIDÁCTICA DEL SUBMÓDULO II

ATRIBUTOS DE LA
COMPETENCIA:
Obtiene
información acerca
de los elementos
de una celda de
manufactura.
Identifica los
elementos básicos
de una celda de
manufactura.
Aplica las normas
de seguridad de
acuerdo a la celda
de manufactura.
Describe el tipo de
comunicación que
existe entre los
elementos de la
celda de
manufactura.
Opera la celda de
manufactura hasta
aprendizaje.
Menciona los
criterios de
evaluación.
Recupera
conocimientos y
experiencias previos
a través de una
evaluación
diagnóstica.
Promueve la
integración grupal y
la comunicación.
Identifica las
expectativas de los
alumnos.
Coordina con las
diferentes academias
obtener el producto
terminado sin
utilizar el módulo
de control de
calidad.
Utiliza el software
de producción de la
celda de
manufactura (CIM).
SABERES DE LA
COMPETENCIA:
Manejo de PC.
Control numérico.
Software de CAD-
CAM.
Software de CIM(
Manufactura
Integrada por
Computadora )
Conocimientos de
robótica.
Conocimientos de
de interés del
Componente de
Formación Básica,
con el propósito de
establecer
estrategias de apoyo
para el dominio de
los aspectos
conceptuales.
COMPETENCIA GENÉRICA Y
PROFESIONAL, SEÑALANDO LOS
PUNTOS DE COINCIDENCIA CON LA
DISCIPLINAR
Desarrollo:
Promueve una investigación
bibliográfica de los
componentes de una celda
de manufactura.
Realiza la demostración de
cómo se opera una celda
de manufactura.
Realiza ejercicios prácticos
para la operación de la
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
Formativa:
Heteroevalaución
Coevaluación
Autoevaluación

PLC’S.
celda de manufactura.
Coordina actividades para
que el alumno opere
administrativamente la
celda de manufactura.
Cierre:
Prepara y aplica la práctica
integradora para operar la
celda de manufactura.
Realiza actividades de
retroalimentación y
evaluación
correspondientes para
verificar la operación de la
celda de manufactura y le
hace ver al alumno los
logros obtenidos.
Solicita la elaboración de un
reporte de prácticas.
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
Sumativa:
Heteroevalaución
Coevaluación
Autoevaluación
4. Diseña y opera una
celda de
manufactura con
software de
simulación (CIM).
ATRIBUTOS DE LA
COMPETENCIA:
Selecciona y utiliza
los controladores
para los
dispositivos de la
celda de
manufactura.
Realiza la interfase
de la celda de
manufactura en el
software de
Apertura:
Identifica las expectativas
de los estudiantes acerca
de lo que esperan aprender
en el diseño de una celda
de manufactura con
software de simulación
(CIM).
Muestra el ambiente de
trabajo del software de
diseño CIM.
Efectúa estrategias
didácticas para el enlace
entre las expectativas y
conocimientos previos de la
operación y diseño de una
celda de manufactura.
Conocimiento
Cuestionario
Resumen
Diagnóstica:
Heteroevalaución
Coevaluación
Autoevaluación
simulación.
Integra los
elementos de la
celda de
manufactura en el
software de CIM.
Crea proyectos
utilizando la celda
de manufactura
simulada en el
software de CIM.
Agrega, elimina,
importa y exporta
proyectos en la
celda de
manufactura.
Realiza la
simulación de la
manufactura de las
piezas.
Diseña las piezas
Desarrollo:
Efectúa una práctica
demostrativa mostrando los
elementos de una celda de
manufactura en el software
de simulación( CIM ).
Efectúa ejercicios prácticos
para el diseño de una celda
de manufactura aplicando la
motivación, supervisión y
toma de decisiones para
lograr objetivos
establecidos.
Recrea la simulación de
situaciones para el ajuste
de la producción en la celda
de manufactura para
correcciones de producción
para realimentar los
conocimientos sobre celdas
de manufactura
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
Formativa:
Heteroevalaución
Coevaluación
Autoevaluación
a fabricar en
software de CAD-
CAM.
Transmite el programa de CNC a la Máquina de Control Numérico.
Realiza la prueba en vacío del programa de CNC.
Ubica las posiciones de entrada y salida en el almacén.
Programa los movimientos del robot de acuerdo a la pieza a fabricar.
Organiza las estaciones a utilizar en la celda de manufactura y programa los elementos de la banda transportadora con las estaciones.
Programa el módulo de control de calidad de la celda de manufactura, para verificar que la pieza a fabricar cumpla con las
Coordina actividades para
crear una celda de
manufactura en el software
de simulación.
Integra el portafolio de
evidencias para la
evaluación de la
competencia en el cierre de
la misma
Acude a empresas para la
observación y operación de
celdas de manufactura
Cierre:
Prepara y aplica la práctica
integradora para la
elaboración de celdas de
manufactura en el software
de diseño.
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios Rubrica
Sumativa:
Cuestionario de
conocimientos.
características requeridas.
Integra los elementos de la celda, para maquinar las piezas.
Crea la orden de manufactura en el software CIM.
Fabrica las piezas en modo virtual.
Fabrica las piezas en la celda de manufactura paso a paso, con la supervisión en cada estación.
Detecta y corrige errores en el proceso de manufactura de las piezas.
Fabrica las piezas utilizando la celda de manufactura.
Realiza un análisis
de elementos
aceptados y
rechazados y
ejecuta
correcciones en los
programas de
Efectúa ejercicios prácticos
para el diseño de una celda
de manufactura.
Los alumnos expresan sus
resultados del diseño,
operación y manipulación
de una celda de
manufactura
Propone la elaboración de
síntesis, conclusiones y
reportes de prácticas que
permiten advertir los
avances y resultados del
aprendizaje en el
estudiante.

SABERES DE LA
COMPETENCIA:
Manejo de PC.
Instalación del
software de CIM.
Manejo de
Software de diseño
CIM( Manufactura
Integrada por
Computadora )
Distingue y ubica
los diferentes tipos
de controladores
de los elementos
de la celda de
manufactura.

4.- Diseña e implementa
un dispositivo
mecatrónico.
ATRIBUTOS DE LA
COMPETENCIA:
Utiliza mecanismos
para crear un
dispositivo
mecatrónico.
Fabrica elementos
del dispositivo
mecatrónico.
Diseña el control
electrónico para
manipular el
dispositivo
mecatrónico.
Apertura:
Identifica las expectativas
de los estudiantes acerca
de lo que esperan aprender
al realizar un dispositivo
mecatrónico.
Aplica un diagnóstico en
forma individual para
identificar a los estudiantes
sobre el dominio que traen
acerca del contenido de los
elementos de un dispositivo
mecatrónico.
Coordina actividades
escolares donde el alumno
visualice lo que puede
llegar a lograr al final de la
competencia.
Conocimiento
Cuestionario
Resumen
Diagnóstica:
Heteroevalaución

Utiliza software de
programación para
controlar el
dispositivo
mecatrónico.
Verifica el correcto
funcionamiento del
dispositivo
mecatrónico.
Aplica los ajustes
necesarios al
dispositivo
mecatrónico.
SABERES DE LA
COMPETENCIA:
Manejo de PC.
Conocimiento de
mecanismos.
Electrónica

analógica.
Electrónica digital.
Hidráulica y
neumática.
Manejo de software
de CAD-CAM .
Operación de
máquinas de CNC.
Programación de
PLC’s.
Programación de
microcontroladores
.
Metrología.
Normas de
Seguridad e
Higiene.
Desarrollo:
Coordina una investigación
para que a partir de ésta
identifique los elementos
por considerar en el
desarrollo de su prototipo
mecatrónico.
Coordina actividades para
que el alumno fundamente
el desarrollo de su
dispositivo mecatrónico.
El alumno presentará los
avances en el diseño y
fabricación de su dispositivo
mecatrónico.
Plantea técnicas de
intercambio de información
para la elaboración del
dispositivo mecatrónico.
Desempeño
Guía de Observación
Reporte
Producto terminado
Ejercicios
Formativa:
Guías de observación.
Reportes de
actividades.

Solicita la elaboración de
esquemas, reportes,
resúmenes de toda la
documentación del
desarrollo de su dispositivo
mecatrónico.
Cierre:
Solicita la elaboración de un
reporte escrito, diagramas y
gráficas de todo el
desarrollo del dispositivo
mecatrónico.
Integra el portafolio de
evidencias para la
sistematización y valoración
de las evidencias de
desempeño, producto y
conocimiento del dispositivo
mecatrónico.
Producto
Lista de Cotejo
Reporte de resultados
Producto terminado
Ejercicios
Rubrica
Sumativa:
Heteroevalaución
Autoevaluación
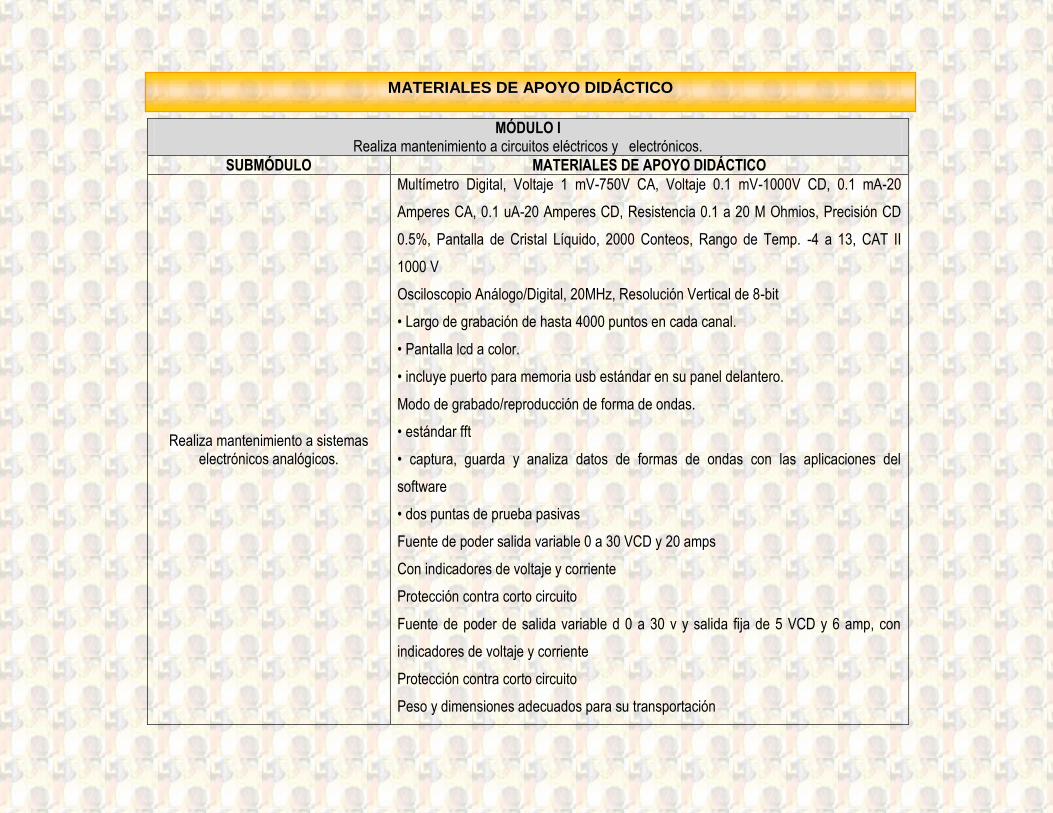
MÓDULO I Realiza mantenimiento a circuitos eléctricos y electrónicos.
SUBMÓDULO MATERIALES DE APOYO DIDÁCTICO
Realiza mantenimiento a sistemas electrónicos analógicos.
Multímetro Digital, Voltaje 1 mV-750V CA, Voltaje 0.1 mV-1000V CD, 0.1 mA-20
Amperes CA, 0.1 uA-20 Amperes CD, Resistencia 0.1 a 20 M Ohmios, Precisión CD
0.5%, Pantalla de Cristal Líquido, 2000 Conteos, Rango de Temp. -4 a 13, CAT II
1000 V
Osciloscopio Análogo/Digital, 20MHz, Resolución Vertical de 8-bit
• Largo de grabación de hasta 4000 puntos en cada canal.
• Pantalla lcd a color.
• incluye puerto para memoria usb estándar en su panel delantero.
Modo de grabado/reproducción de forma de ondas.
• estándar fft
• captura, guarda y analiza datos de formas de ondas con las aplicaciones del
software
• dos puntas de prueba pasivas
Fuente de poder salida variable 0 a 30 VCD y 20 amps
Con indicadores de voltaje y corriente
Protección contra corto circuito
Fuente de poder de salida variable d 0 a 30 v y salida fija de 5 VCD y 6 amp, con
indicadores de voltaje y corriente
Protección contra corto circuito
Peso y dimensiones adecuados para su transportación
MATERIALES DE APOYO DIDÁCTICO

Fuente de poder tipo auto transformador voltaje de entrada de 127 VCA y salida
variable de 0 a 150 VCA, 5 amp.
Generador de Funciones, Rango de Frecuencia 0.1 a 10 MHz, Distorsión 30%,
Tiempo de Subida/Bajada de Onda Cuadrada 30 nS, Barrido Linear Interno o
Logarítmico
Micrómetro de Exteriores, Mecánico, Rango 0-1"/mm, Resoluciones 0.0001"/mm,
Manguito de Matraca, Yunque Plano, Husillo Plano, Tuerca de Retención Tipo
Palanca, Armazón Esmaltado, Escala Vernier
Multímetro de banco de 50,000 cuentas.
Medición - dc tensión / corriente, voltaje de CA / corriente con verdadero rms,
resistencia, capacitancia, frecuencia, continuidad (con zumbador)
Amperímetro Digital de Pinza, para medir corriente de arranque en motores
eléctricos,Pantalla de Cristal Líquido de 3 3/4", Resistencia de 600 0/6K Ohmios, 600
VCD, 600 VCA, 999.9 Amp, Rango Automático, RMS Verdadero, Capacidad de
Mordaza 1.7", CA/CD, Mínimo/Máximo
Vernier, rango de 0-6"/ .0005". Habilidad para retener y regresar al cero, y para
instalar los limites mínimo y máximo. Botón de PRESET para instalar cualquier lectura
a cualquier posición. Apagado automático después de los 5 minutos sin uso
Lámpara con lupa integrada p/ trabajos de electrónica
Compresora de aire vertical 2hp 116 psi - 8 bar - 246l/min.
Sierra angular de 10", 2.5 hp
Tornillo de banco fundido en acero 5"
Escalera tipo tijera, aluminio 7 escalones, alcance 1.95 mt
Portafolio con 31 herramientas,
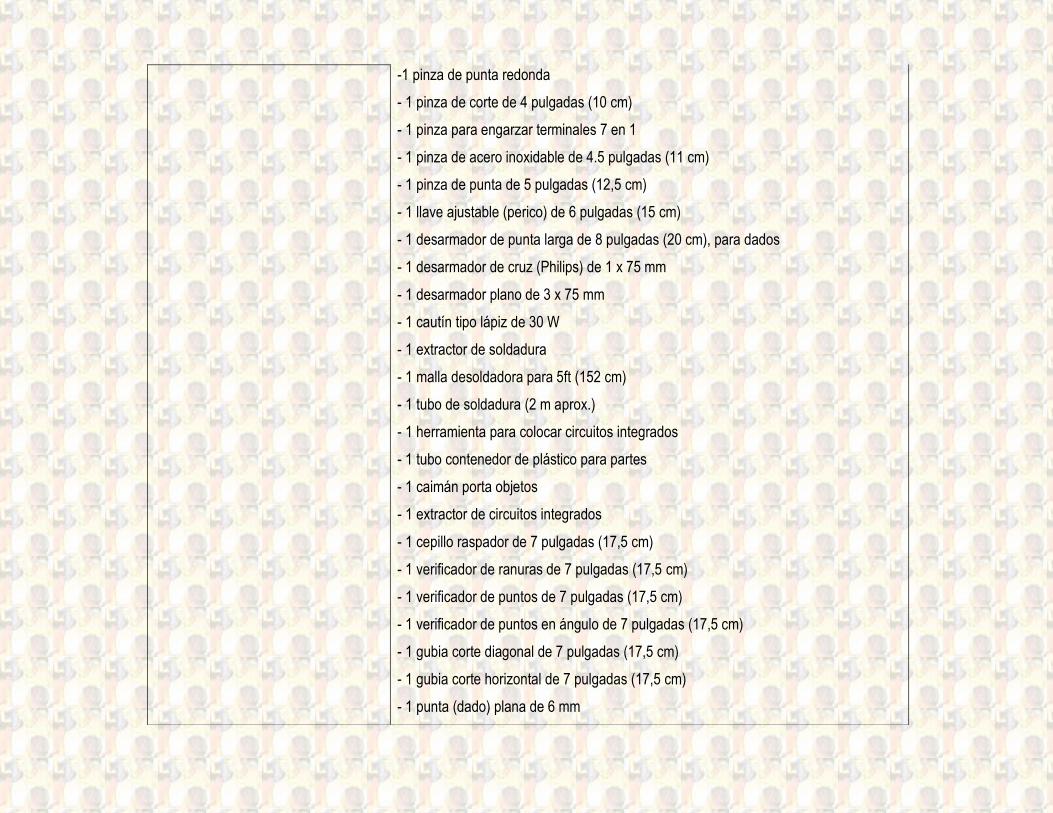
-1 pinza de punta redonda
- 1 pinza de corte de 4 pulgadas (10 cm)
- 1 pinza para engarzar terminales 7 en 1
- 1 pinza de acero inoxidable de 4.5 pulgadas (11 cm)
- 1 pinza de punta de 5 pulgadas (12,5 cm)
- 1 llave ajustable (perico) de 6 pulgadas (15 cm)
- 1 desarmador de punta larga de 8 pulgadas (20 cm), para dados
- 1 desarmador de cruz (Philips) de 1 x 75 mm
- 1 desarmador plano de 3 x 75 mm
- 1 cautín tipo lápiz de 30 W
- 1 extractor de soldadura
- 1 malla desoldadora para 5ft (152 cm)
- 1 tubo de soldadura (2 m aprox.)
- 1 herramienta para colocar circuitos integrados
- 1 tubo contenedor de plástico para partes
- 1 caimán porta objetos
- 1 extractor de circuitos integrados
- 1 cepillo raspador de 7 pulgadas (17,5 cm)
- 1 verificador de ranuras de 7 pulgadas (17,5 cm)
- 1 verificador de puntos de 7 pulgadas (17,5 cm)
- 1 verificador de puntos en ángulo de 7 pulgadas (17,5 cm)
- 1 gubia corte diagonal de 7 pulgadas (17,5 cm)
- 1 gubia corte horizontal de 7 pulgadas (17,5 cm)
- 1 punta (dado) plana de 6 mm

- 1 punta (dado) de cruz del No. 1
- 1 punta (dado) TORX T8
- 1 punta (dado) TORX T10
- 1 punta (dado) TORX T15
- 1 punta (dado) hexagonal de caja de 5 mm
- 1 punta (dado) hexagonal de caja de 6 mm
- 1 punta (dado) hexagonal de caja de 7 mm
Remachadora profesional 4 boquillas 9"
Lentes de protección
Brocha 1 "
Brocha 1/2 "
Cúter multiusos 6" (con paquete de repuestos)
Arco p/ segueta de 12" con segueta bimetálica de 18 d/p
Organizador de componentes electrónicos 18 compartimentos
Juego desarmadores varias medidas, 42 puntas intercambiables - dados
Desoldador de succión con punta de teflón
Flexo metro de plástico de 5 mts
Guías nylon de 15 mts p/ cables eléctricos y de red
Llave perica forja en acero al carbón, 10" apertura 1 1/8" y mango forrado
Llaves Allen juego 8 llaves tipo navaja en mm y pulgadas
Martillo de uña de 1 libra mango hickery 12"
Pinza ponchadora para cable coaxial
Taladro de banco con broquero sin llave, motor 1/3 hp,
Juego de brocas de acero 29 pzas punta con ángulo de corte de 118º y estuche metal

Taladro roto martillo velocidad variable y reversible.
Esmeril piedra fina y gruesa de 4.5" diámetro. Base para montar en banco
Sierra caladora manual de velocidad variable 650 w + jgo. Seguetas repuesto
Carro de servicio 68 x 73 x 46 cm con cerradura de seguridad
Extensión eléctrica 6 mts trabajo pesado
Cautín de estación para trabajo pesado de 60 watts con punta mediana esmaltada
para trabajos en soldaduras de mediana potencia
Cautín tipo lápiz profesional de 40 watts con punta fina esmaltada para trabajos de
precisión.
ProtoBoard tamaño estándar, con líneas numeradas, contactos de alta calidad.
Realiza mantenimiento a sistemas electrónicos digitales.
Multímetro Digital, Voltaje 1 mV-750V CA, Voltaje 0.1 mV-1000V CD, 0.1 mA-20 Amperes CA, 0.1 uA-20 Amperes CD, Resistencia 0.1 a 20 M Ohmios, Precisión CD 0.5%, Pantalla de Cristal Líquido, 2000 Conteos, Rango de Temp. -4 a 13, CAT II 1000 V Osciloscopio Análogo/Digital, 20MHz, Resolución Vertical de 8-bit • Largo de grabación de hasta 4000 puntos en cada canal. • Pantalla lcd a color. • incluye puerto para memoria usb estándar en su panel delantero. Modo de grabado/reproducción de forma de ondas. • estándar fft • captura, guarda y analiza datos de formas de ondas con las aplicaciones del software • dos puntas de prueba pasivas Fuente de poder salida variable 0 a 30 VCD y 20 amps Con indicadores de voltaje y corriente Protección contra corto circuito Fuente de poder de salida variable d 0 a 30 v y salida fija de 5 VCD y 6 amp, con indicadores de voltaje y corriente Protección contra corto circuito Peso y dimensiones adecuados para su transportación
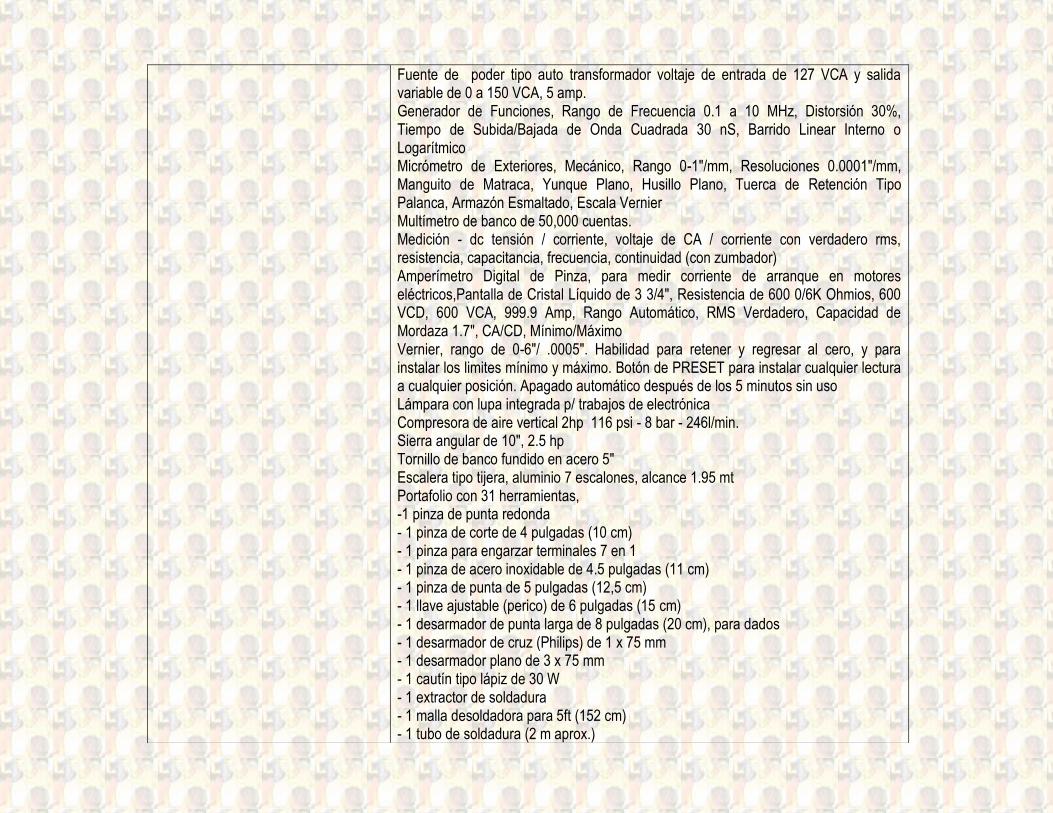
Fuente de poder tipo auto transformador voltaje de entrada de 127 VCA y salida variable de 0 a 150 VCA, 5 amp. Generador de Funciones, Rango de Frecuencia 0.1 a 10 MHz, Distorsión 30%, Tiempo de Subida/Bajada de Onda Cuadrada 30 nS, Barrido Linear Interno o Logarítmico Micrómetro de Exteriores, Mecánico, Rango 0-1"/mm, Resoluciones 0.0001"/mm, Manguito de Matraca, Yunque Plano, Husillo Plano, Tuerca de Retención Tipo Palanca, Armazón Esmaltado, Escala Vernier Multímetro de banco de 50,000 cuentas. Medición - dc tensión / corriente, voltaje de CA / corriente con verdadero rms, resistencia, capacitancia, frecuencia, continuidad (con zumbador) Amperímetro Digital de Pinza, para medir corriente de arranque en motores eléctricos,Pantalla de Cristal Líquido de 3 3/4", Resistencia de 600 0/6K Ohmios, 600 VCD, 600 VCA, 999.9 Amp, Rango Automático, RMS Verdadero, Capacidad de Mordaza 1.7", CA/CD, Mínimo/Máximo Vernier, rango de 0-6"/ .0005". Habilidad para retener y regresar al cero, y para instalar los limites mínimo y máximo. Botón de PRESET para instalar cualquier lectura a cualquier posición. Apagado automático después de los 5 minutos sin uso Lámpara con lupa integrada p/ trabajos de electrónica Compresora de aire vertical 2hp 116 psi - 8 bar - 246l/min. Sierra angular de 10", 2.5 hp Tornillo de banco fundido en acero 5" Escalera tipo tijera, aluminio 7 escalones, alcance 1.95 mt Portafolio con 31 herramientas, -1 pinza de punta redonda - 1 pinza de corte de 4 pulgadas (10 cm) - 1 pinza para engarzar terminales 7 en 1 - 1 pinza de acero inoxidable de 4.5 pulgadas (11 cm) - 1 pinza de punta de 5 pulgadas (12,5 cm) - 1 llave ajustable (perico) de 6 pulgadas (15 cm) - 1 desarmador de punta larga de 8 pulgadas (20 cm), para dados - 1 desarmador de cruz (Philips) de 1 x 75 mm - 1 desarmador plano de 3 x 75 mm - 1 cautín tipo lápiz de 30 W - 1 extractor de soldadura - 1 malla desoldadora para 5ft (152 cm) - 1 tubo de soldadura (2 m aprox.)
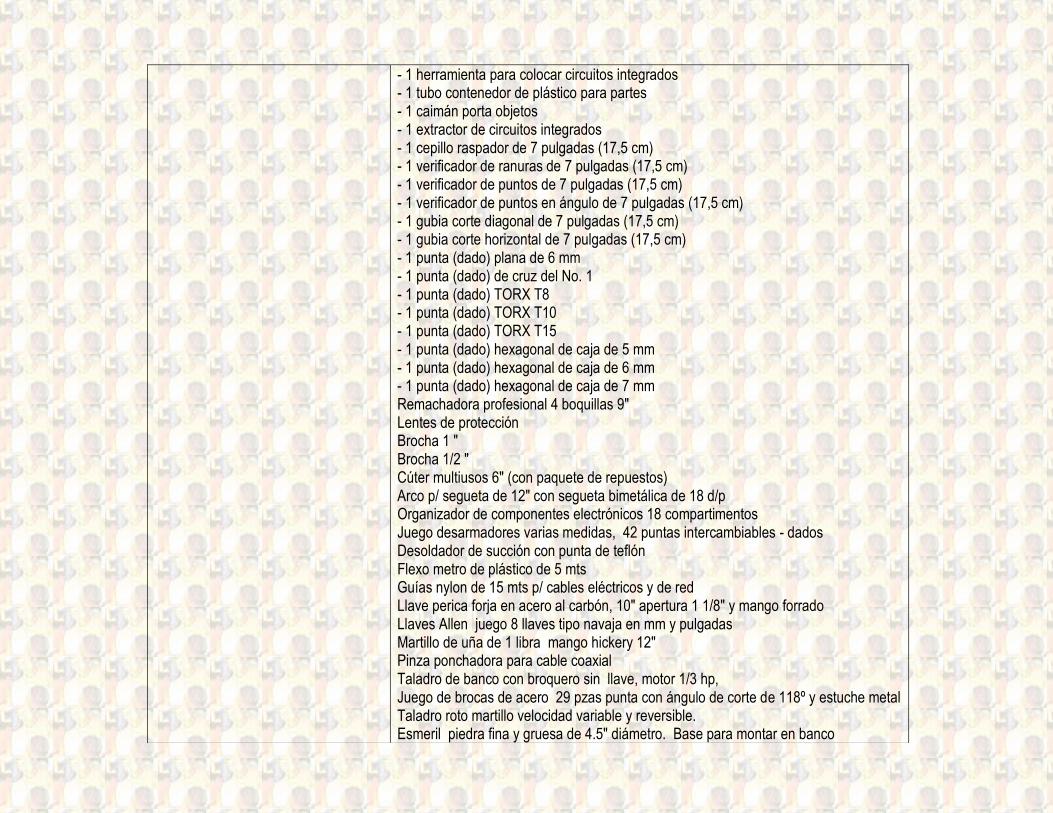
- 1 herramienta para colocar circuitos integrados - 1 tubo contenedor de plástico para partes - 1 caimán porta objetos - 1 extractor de circuitos integrados - 1 cepillo raspador de 7 pulgadas (17,5 cm) - 1 verificador de ranuras de 7 pulgadas (17,5 cm) - 1 verificador de puntos de 7 pulgadas (17,5 cm) - 1 verificador de puntos en ángulo de 7 pulgadas (17,5 cm) - 1 gubia corte diagonal de 7 pulgadas (17,5 cm) - 1 gubia corte horizontal de 7 pulgadas (17,5 cm) - 1 punta (dado) plana de 6 mm - 1 punta (dado) de cruz del No. 1 - 1 punta (dado) TORX T8 - 1 punta (dado) TORX T10 - 1 punta (dado) TORX T15 - 1 punta (dado) hexagonal de caja de 5 mm - 1 punta (dado) hexagonal de caja de 6 mm - 1 punta (dado) hexagonal de caja de 7 mm Remachadora profesional 4 boquillas 9" Lentes de protección Brocha 1 " Brocha 1/2 " Cúter multiusos 6" (con paquete de repuestos) Arco p/ segueta de 12" con segueta bimetálica de 18 d/p Organizador de componentes electrónicos 18 compartimentos Juego desarmadores varias medidas, 42 puntas intercambiables - dados Desoldador de succión con punta de teflón Flexo metro de plástico de 5 mts Guías nylon de 15 mts p/ cables eléctricos y de red Llave perica forja en acero al carbón, 10" apertura 1 1/8" y mango forrado Llaves Allen juego 8 llaves tipo navaja en mm y pulgadas Martillo de uña de 1 libra mango hickery 12" Pinza ponchadora para cable coaxial Taladro de banco con broquero sin llave, motor 1/3 hp, Juego de brocas de acero 29 pzas punta con ángulo de corte de 118º y estuche metal Taladro roto martillo velocidad variable y reversible. Esmeril piedra fina y gruesa de 4.5" diámetro. Base para montar en banco
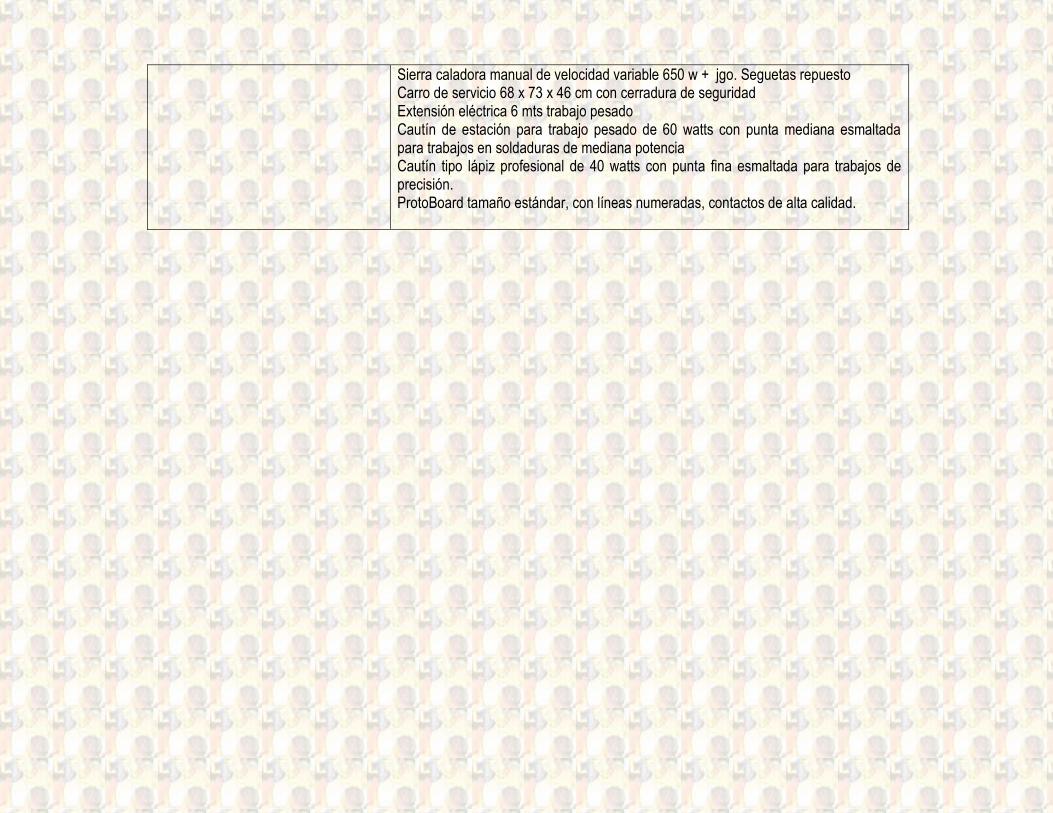
Sierra caladora manual de velocidad variable 650 w + jgo. Seguetas repuesto Carro de servicio 68 x 73 x 46 cm con cerradura de seguridad Extensión eléctrica 6 mts trabajo pesado Cautín de estación para trabajo pesado de 60 watts con punta mediana esmaltada para trabajos en soldaduras de mediana potencia Cautín tipo lápiz profesional de 40 watts con punta fina esmaltada para trabajos de precisión. ProtoBoard tamaño estándar, con líneas numeradas, contactos de alta calidad.
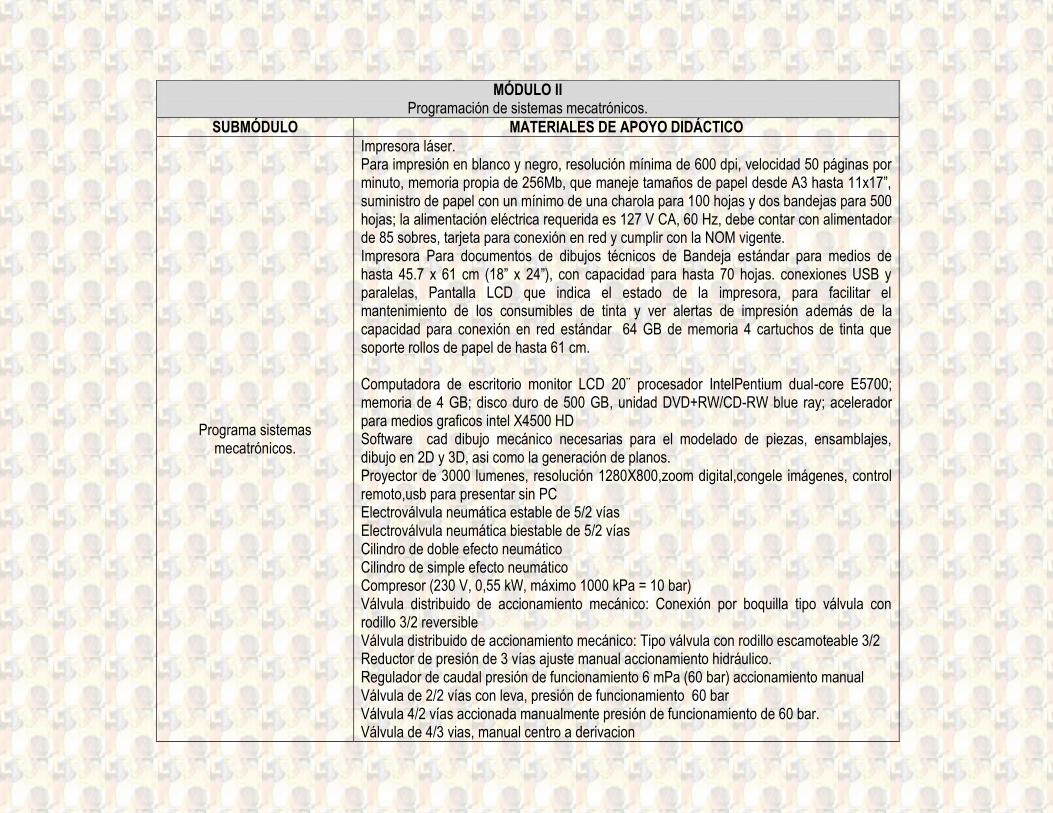
MÓDULO II Programación de sistemas mecatrónicos.
SUBMÓDULO MATERIALES DE APOYO DIDÁCTICO
Programa sistemas mecatrónicos.
Impresora láser. Para impresión en blanco y negro, resolución mínima de 600 dpi, velocidad 50 páginas por minuto, memoria propia de 256Mb, que maneje tamaños de papel desde A3 hasta 11x17”, suministro de papel con un mínimo de una charola para 100 hojas y dos bandejas para 500 hojas; la alimentación eléctrica requerida es 127 V CA, 60 Hz, debe contar con alimentador de 85 sobres, tarjeta para conexión en red y cumplir con la NOM vigente. Impresora Para documentos de dibujos técnicos de Bandeja estándar para medios de hasta 45.7 x 61 cm (18” x 24”), con capacidad para hasta 70 hojas. conexiones USB y paralelas, Pantalla LCD que indica el estado de la impresora, para facilitar el mantenimiento de los consumibles de tinta y ver alertas de impresión además de la capacidad para conexión en red estándar 64 GB de memoria 4 cartuchos de tinta que soporte rollos de papel de hasta 61 cm. Computadora de escritorio monitor LCD 20¨ procesador IntelPentium dual-core E5700; memoria de 4 GB; disco duro de 500 GB, unidad DVD+RW/CD-RW blue ray; acelerador para medios graficos intel X4500 HD Software cad dibujo mecánico necesarias para el modelado de piezas, ensamblajes, dibujo en 2D y 3D, asi como la generación de planos. Proyector de 3000 lumenes, resolución 1280X800,zoom digital,congele imágenes, control remoto,usb para presentar sin PC Electroválvula neumática estable de 5/2 vías Electroválvula neumática biestable de 5/2 vías Cilindro de doble efecto neumático Cilindro de simple efecto neumático Compresor (230 V, 0,55 kW, máximo 1000 kPa = 10 bar) Válvula distribuido de accionamiento mecánico: Conexión por boquilla tipo válvula con rodillo 3/2 reversible Válvula distribuido de accionamiento mecánico: Tipo válvula con rodillo escamoteable 3/2 Reductor de presión de 3 vías ajuste manual accionamiento hidráulico. Regulador de caudal presión de funcionamiento 6 mPa (60 bar) accionamiento manual Válvula de 2/2 vías con leva, presión de funcionamiento 60 bar Válvula 4/2 vías accionada manualmente presión de funcionamiento de 60 bar. Válvula de 4/3 vias, manual centro a derivacion

Válvula de antirretorno Regulador de caudal acoplamiento rápido de precisión de 0 a 1000 kPa Regulador de presión con manómetro Válvula de escape rápido de 50 – 1000 kPa. Válvula de simultaneidad (and) Válvula neumática de 3/2 vías, pilotada por un lado convertible, muelle de retorno 250-1000 kPa Válvula de estrangulación y antirretorno margen de presión de 20- 1000 kPa Válvula neumática de 5/2 vías, doble pilotaje, accionamiento directo bilateral Filtro, regulador lubricador caudal nominal de 400 a 650 l/min Cilindro hidráulico de doble efecto con leva de control y dos boquillas. Manómetro presión máxima 100 bar Válvula de 4/2 vías hidráulicas, accionada manualmente Válvula antirretorno hidráulica presión de funcionamiento (60 bar) Válvula de antirretorno hidráulica, pilotada simple Válvula de cierre con dos conexiones. Presión de funcionamiento (60 bar) Válvula hidráulica proporcional de 4/3 vías Bomba hidráulica de motor de AC, presión de funcionamiento 60 bar cap. Depósito 5 ltrs. 110V .55 kW 60 Hz. 2.7 l/min. 1680 rpm. Grupo Hidráulico Transmisión Piñón-Guía corredera Transmisión por correa. Multiplicador-reductor de velocidad. (Poleas) Árbol de poleas. Cambio de velocidad. Transmisión por cadena 500 mm X 250 mm metal pulido Transmisión por engranajes rectos. Tren de engranajes de aproximadamente 300mm x 150mm metal pulido . Cambio de plano por engranaje cónico Engranaje de dientes laterales de aproximadamente 300mm x 150mm metal pulido Engranaje sinfín-corona de aproximadamente 300mm x 150mm metal pulido Mecanismo biela-manivela de aproximadamente 300mm x 150mm metal pulido Mecanismos de excéntrica de aproximadamente 300mm x 150mm metal pulido . Engranajes helicoidales Leva excéntrica de metal ligero en módulo de aproximadamente 300mm x 150mm metal pulido Mecanismo Geneva de metal ligero en módulo de aproximadamente 300mm x 150mm metal pulido Banda transportadora de tejido sintético ahulado y metal ligero en módulo de aproximadamente 500 mm x 100mm (unidad de salida)

Regulador de voltaje 2000VA/1000W, 8 contactos Software de Simulación de Neumática e Hidráulica Electroválvula neumática estable de 5/3 vías Unidad de mantenimiento neumático Pinzas de obstrucción de flujo Llave ajustable de 12¨ Juego de destornillador punta plana Juego de destornillador punta phillip
Automatiza procesos electroneumáticos y
electrohidráulicos por medio de PLC.
Impresora láser. Para impresión en blanco y negro, resolución mínima de 600 dpi, velocidad 50 páginas por minuto, memoria propia de 256Mb, que maneje tamaños de papel desde A3 hasta 11x17”, suministro de papel con un mínimo de una charola para 100 hojas y dos bandejas para 500 hojas; la alimentación eléctrica requerida es 127 V CA, 60 Hz, debe contar con alimentador de 85 sobres, tarjeta para conexión en red y cumplir con la NOM vigente. Impresora Para documentos de dibujos técnicos de Bandeja estándar para medios de hasta 45.7 x 61 cm (18” x 24”), con capacidad para hasta 70 hojas. conexiones USB y paralelas, Pantalla LCD que indica el estado de la impresora, para facilitar el mantenimiento de los consumibles de tinta y ver alertas de impresión además de la capacidad para conexión en red estándar 64 GB de memoria 4 cartuchos de tinta que soporte rollos de papel de hasta 61 cm. Computadora de escritorio monitor LCD 20¨ procesador IntelPentium dual-core E5700; memoria de 4 GB; disco duro de 500 GB, unidad DVD+RW/CD-RW blue ray; acelerador para medios graficos intel X4500 HD Software cad dibujo mecánico necesarias para el modelado de piezas, ensamblajes, dibujo en 2D y 3D, asi como la generación de planos.
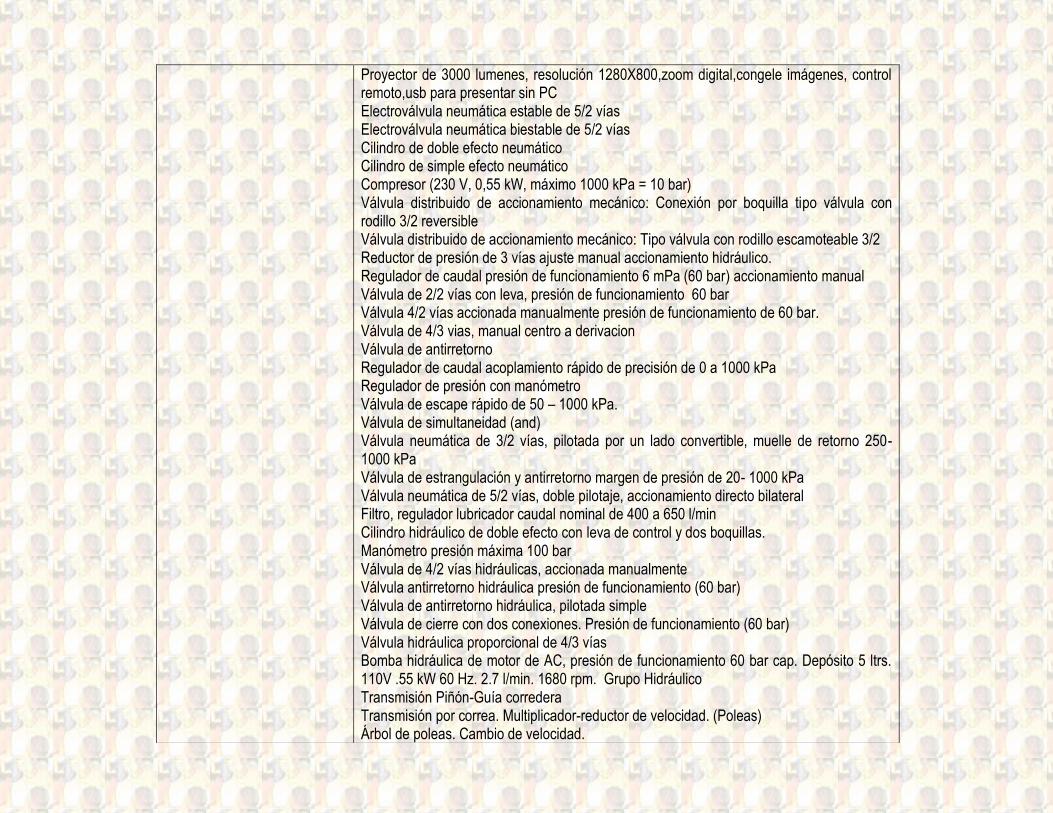
Proyector de 3000 lumenes, resolución 1280X800,zoom digital,congele imágenes, control remoto,usb para presentar sin PC Electroválvula neumática estable de 5/2 vías Electroválvula neumática biestable de 5/2 vías Cilindro de doble efecto neumático Cilindro de simple efecto neumático Compresor (230 V, 0,55 kW, máximo 1000 kPa = 10 bar) Válvula distribuido de accionamiento mecánico: Conexión por boquilla tipo válvula con rodillo 3/2 reversible Válvula distribuido de accionamiento mecánico: Tipo válvula con rodillo escamoteable 3/2 Reductor de presión de 3 vías ajuste manual accionamiento hidráulico. Regulador de caudal presión de funcionamiento 6 mPa (60 bar) accionamiento manual Válvula de 2/2 vías con leva, presión de funcionamiento 60 bar Válvula 4/2 vías accionada manualmente presión de funcionamiento de 60 bar. Válvula de 4/3 vias, manual centro a derivacion Válvula de antirretorno Regulador de caudal acoplamiento rápido de precisión de 0 a 1000 kPa Regulador de presión con manómetro Válvula de escape rápido de 50 – 1000 kPa. Válvula de simultaneidad (and) Válvula neumática de 3/2 vías, pilotada por un lado convertible, muelle de retorno 250-1000 kPa Válvula de estrangulación y antirretorno margen de presión de 20- 1000 kPa Válvula neumática de 5/2 vías, doble pilotaje, accionamiento directo bilateral Filtro, regulador lubricador caudal nominal de 400 a 650 l/min Cilindro hidráulico de doble efecto con leva de control y dos boquillas. Manómetro presión máxima 100 bar Válvula de 4/2 vías hidráulicas, accionada manualmente Válvula antirretorno hidráulica presión de funcionamiento (60 bar) Válvula de antirretorno hidráulica, pilotada simple Válvula de cierre con dos conexiones. Presión de funcionamiento (60 bar) Válvula hidráulica proporcional de 4/3 vías Bomba hidráulica de motor de AC, presión de funcionamiento 60 bar cap. Depósito 5 ltrs. 110V .55 kW 60 Hz. 2.7 l/min. 1680 rpm. Grupo Hidráulico Transmisión Piñón-Guía corredera Transmisión por correa. Multiplicador-reductor de velocidad. (Poleas) Árbol de poleas. Cambio de velocidad.
Transmisión por cadena 500 mm X 250 mm metal pulido Transmisión por engranajes rectos. Tren de engranajes de aproximadamente 300mm x 150mm metal pulido . Cambio de plano por engranaje cónico Engranaje de dientes laterales de aproximadamente 300mm x 150mm metal pulido Engranaje sinfín-corona de aproximadamente 300mm x 150mm metal pulido Mecanismo biela-manivela de aproximadamente 300mm x 150mm metal pulido Mecanismos de excéntrica de aproximadamente 300mm x 150mm metal pulido . Engranajes helicoidales Leva excéntrica de metal ligero en módulo de aproximadamente 300mm x 150mm metal pulido Mecanismo Geneva de metal ligero en módulo de aproximadamente 300mm x 150mm metal pulido Banda transportadora de tejido sintético ahulado y metal ligero en módulo de aproximadamente 500 mm x 100mm (unidad de salida) Regulador de voltaje 2000VA/1000W, 8 contactos Software de Simulación de Neumática e Hidráulica Electroválvula neumática estable de 5/3 vías Unidad de mantenimiento neumático Pinzas de obstrucción de flujo Llave ajustable de 12¨ Juego de destornillador punta plana Juego de destornillador punta phillip
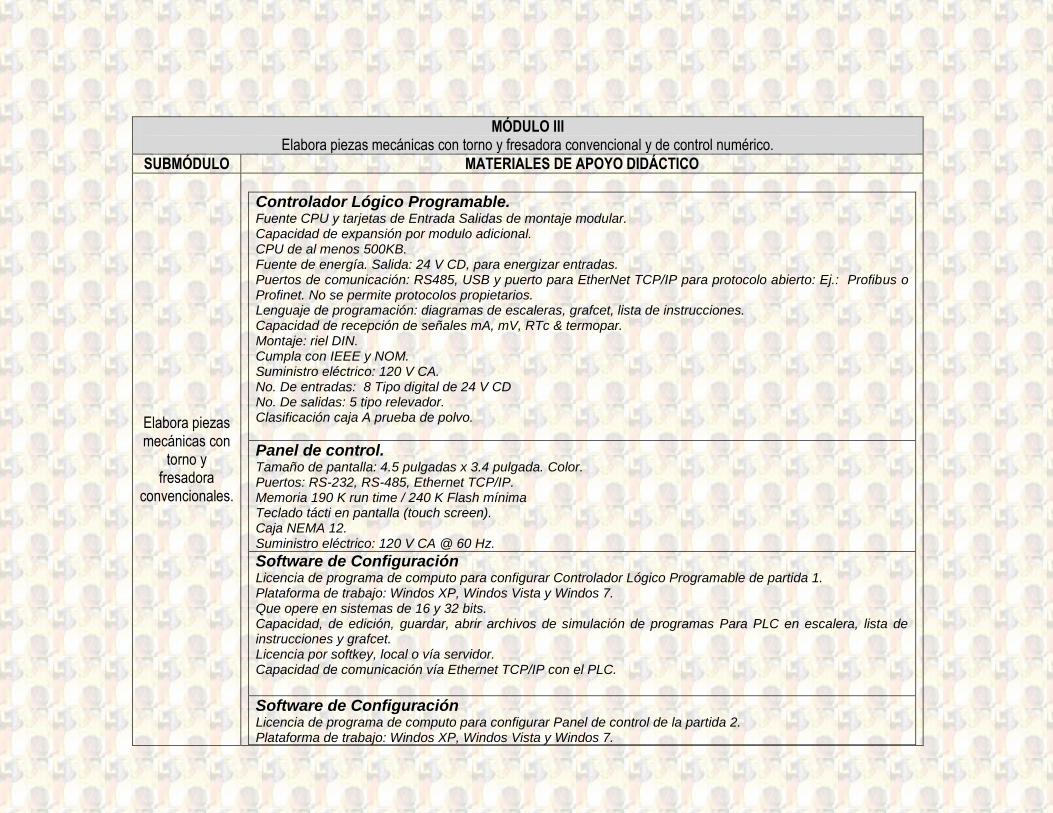
MÓDULO III Elabora piezas mecánicas con torno y fresadora convencional y de control numérico.
SUBMÓDULO MATERIALES DE APOYO DIDÁCTICO
Elabora piezas mecánicas con
torno y fresadora
convencionales.
Controlador Lógico Programable. Fuente CPU y tarjetas de Entrada Salidas de montaje modular. Capacidad de expansión por modulo adicional. CPU de al menos 500KB. Fuente de energía. Salida: 24 V CD, para energizar entradas. Puertos de comunicación: RS485, USB y puerto para EtherNet TCP/IP para protocolo abierto: Ej.: Profibus o Profinet. No se permite protocolos propietarios. Lenguaje de programación: diagramas de escaleras, grafcet, lista de instrucciones. Capacidad de recepción de señales mA, mV, RTc & termopar. Montaje: riel DIN. Cumpla con IEEE y NOM. Suministro eléctrico: 120 V CA. No. De entradas: 8 Tipo digital de 24 V CD No. De salidas: 5 tipo relevador. Clasificación caja A prueba de polvo.
Panel de control. Tamaño de pantalla: 4.5 pulgadas x 3.4 pulgada. Color. Puertos: RS-232, RS-485, Ethernet TCP/IP. Memoria 190 K run time / 240 K Flash mínima Teclado tácti en pantalla (touch screen). Caja NEMA 12. Suministro eléctrico: 120 V CA @ 60 Hz.
Software de Configuración Licencia de programa de computo para configurar Controlador Lógico Programable de partida 1. Plataforma de trabajo: Windos XP, Windos Vista y Windos 7. Que opere en sistemas de 16 y 32 bits. Capacidad, de edición, guardar, abrir archivos de simulación de programas Para PLC en escalera, lista de instrucciones y grafcet. Licencia por softkey, local o vía servidor. Capacidad de comunicación vía Ethernet TCP/IP con el PLC.
Software de Configuración Licencia de programa de computo para configurar Panel de control de la partida 2. Plataforma de trabajo: Windos XP, Windos Vista y Windos 7.
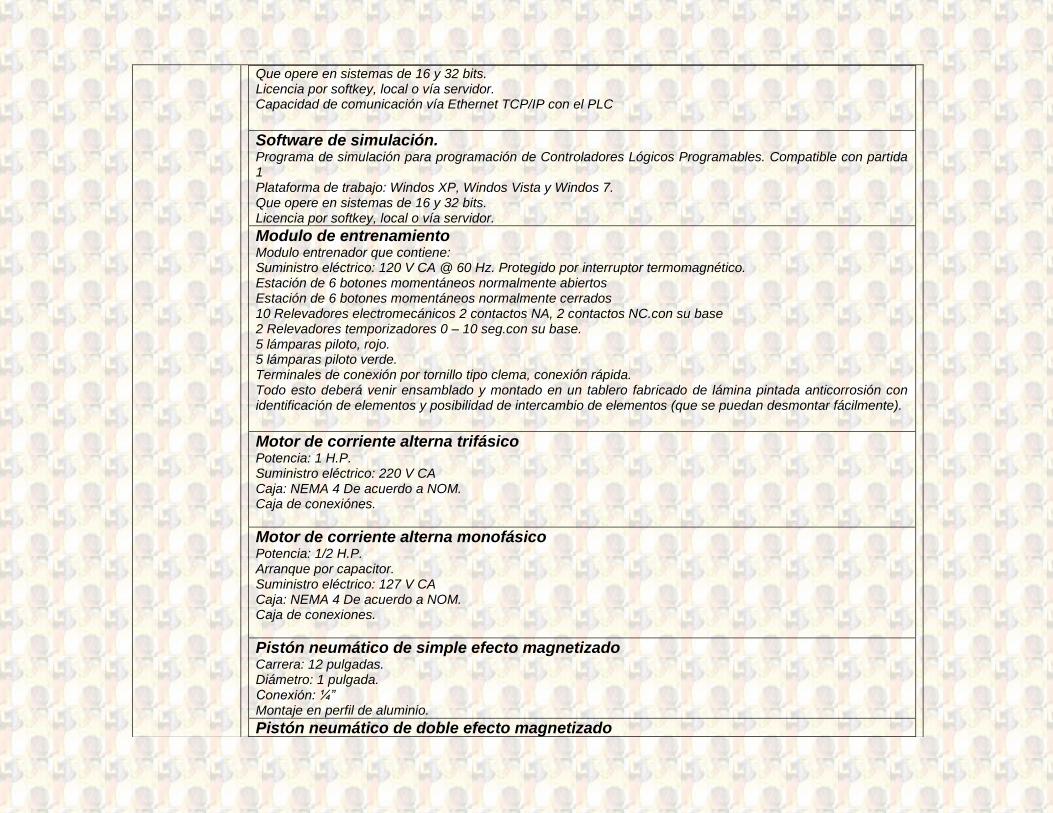
Que opere en sistemas de 16 y 32 bits. Licencia por softkey, local o vía servidor. Capacidad de comunicación vía Ethernet TCP/IP con el PLC
Software de simulación. Programa de simulación para programación de Controladores Lógicos Programables. Compatible con partida 1 Plataforma de trabajo: Windos XP, Windos Vista y Windos 7. Que opere en sistemas de 16 y 32 bits. Licencia por softkey, local o vía servidor.
Modulo de entrenamiento Modulo entrenador que contiene: Suministro eléctrico: 120 V CA @ 60 Hz. Protegido por interruptor termomagnético. Estación de 6 botones momentáneos normalmente abiertos Estación de 6 botones momentáneos normalmente cerrados 10 Relevadores electromecánicos 2 contactos NA, 2 contactos NC.con su base 2 Relevadores temporizadores 0 – 10 seg.con su base. 5 lámparas piloto, rojo. 5 lámparas piloto verde. Terminales de conexión por tornillo tipo clema, conexión rápida. Todo esto deberá venir ensamblado y montado en un tablero fabricado de lámina pintada anticorrosión con identificación de elementos y posibilidad de intercambio de elementos (que se puedan desmontar fácilmente).
Motor de corriente alterna trifásico Potencia: 1 H.P. Suministro eléctrico: 220 V CA Caja: NEMA 4 De acuerdo a NOM. Caja de conexiónes.
Motor de corriente alterna monofásico Potencia: 1/2 H.P. Arranque por capacitor. Suministro eléctrico: 127 V CA Caja: NEMA 4 De acuerdo a NOM. Caja de conexiones.
Pistón neumático de simple efecto magnetizado Carrera: 12 pulgadas. Diámetro: 1 pulgada. Conexión: ¼” Montaje en perfil de aluminio.
Pistón neumático de doble efecto magnetizado

Carrera: 12 pulgadas. Diámetro: 1 pulgada. Conexión: ¼” Montaje en perfil de aluminio.
Manguera para conexiones neumática. Conexión: ¼”
Electroválvula 5/2 Conexión: ¼”
Electroválvula 3/2 Conexión: ¼”
Sensor magnético Sistema a dos hilos, 24 V CD Para montaje en pistones de partida 9 y 10.
Licencia de programa. Programa: Lenguaje C. Plataforma de trabajo: Windows XP, Windows Vista y Windows 7.
Licencia de programa. Programa: Visual Basic Plataforma de trabajo: Windows XP, Windows Vista y Windows 7.
Elabora piezas mecánicas con
centros de maquinado de control numérico.
Controlador Lógico Programable. Fuente CPU y tarjetas de Entrada Salidas de montaje modular. Capacidad de expansión por modulo adicional. CPU de al menos 500KB. Fuente de energía. Salida: 24 V CD, para energizar entradas. Puertos de comunicación: RS485, USB y puerto para EtherNet TCP/IP para protocolo abierto: Ej.: Profibus o Profinet. No se permite protocolos propietarios. Lenguaje de programación: diagramas de escaleras, grafcet, lista de instrucciones. Capacidad de recepción de señales mA, mV, RTc & termopar. Montaje: riel DIN. Cumpla con IEEE y NOM. Suministro eléctrico: 120 V CA. No. De entradas: 8 Tipo digital de 24 V CD No. De salidas: 5 tipo relevador. Clasificación caja A prueba de polvo.
Panel de control. Tamaño de pantalla: 4.5 pulgadas x 3.4 pulgada. Color.

Puertos: RS-232, RS-485, Ethernet TCP/IP. Memoria 190 K run time / 240 K Flash mínima Teclado tácti en pantalla (touch screen). Caja NEMA 12. Suministro eléctrico: 120 V CA @ 60 Hz.
Software de Configuración Licencia de programa de computo para configurar Controlador Lógico Programable de partida 1. Plataforma de trabajo: Windos XP, Windos Vista y Windos 7. Que opere en sistemas de 16 y 32 bits. Capacidad, de edición, guardar, abrir archivos de simulación de programas Para PLC en escalera, lista de instrucciones y grafcet. Licencia por softkey, local o vía servidor. Capacidad de comunicación vía Ethernet TCP/IP con el PLC.
Software de Configuración Licencia de programa de computo para configurar Panel de control de la partida 2. Plataforma de trabajo: Windos XP, Windos Vista y Windos 7. Que opere en sistemas de 16 y 32 bits. Licencia por softkey, local o vía servidor. Capacidad de comunicación vía Ethernet TCP/IP con el PLC
Software de simulación. Programa de simulación para programación de Controladores Lógicos Programables. Compatible con partida 1 Plataforma de trabajo: Windos XP, Windos Vista y Windos 7. Que opere en sistemas de 16 y 32 bits. Licencia por softkey, local o vía servidor.
Modulo de entrenamiento Modulo entrenador que contiene: Suministro eléctrico: 120 V CA @ 60 Hz. Protegido por interruptor termomagnético. Estación de 6 botones momentáneos normalmente abiertos Estación de 6 botones momentáneos normalmente cerrados 10 Relevadores electromecánicos 2 contactos NA, 2 contactos NC.con su base 2 Relevadores temporizadores 0 – 10 seg.con su base. 5 lámparas piloto, rojo. 5 lámparas piloto verde. Terminales de conexión por tornillo tipo clema, conexión rápida. Todo esto deberá venir ensamblado y montado en un tablero fabricado de lámina pintada anticorrosión con identificación de elementos y posibilidad de intercambio de elementos (que se puedan desmontar fácilmente).
Motor de corriente alterna trifásico Potencia: 1 H.P.

Suministro eléctrico: 220 V CA Caja: NEMA 4 De acuerdo a NOM. Caja de conexiónes.
Motor de corriente alterna monofásico Potencia: 1/2 H.P. Arranque por capacitor. Suministro eléctrico: 127 V CA Caja: NEMA 4 De acuerdo a NOM. Caja de conexiones.
Pistón neumático de simple efecto magnetizado Carrera: 12 pulgadas. Diámetro: 1 pulgada. Conexión: ¼” Montaje en perfil de aluminio.
Pistón neumático de doble efecto magnetizado Carrera: 12 pulgadas. Diámetro: 1 pulgada. Conexión: ¼” Montaje en perfil de aluminio.
Manguera para conexiones neumática. Conexión: ¼”
Electroválvula 5/2 Conexión: ¼”
Electroválvula 3/2 Conexión: ¼”
Sensor magnético Sistema a dos hilos, 24 V CD Para montaje en pistones de partida 9 y 10.
Licencia de programa. Programa: Lenguaje C. Plataforma de trabajo: Windows XP, Windows Vista y Windows 7.
Licencia de programa. Programa: Visual Basic Plataforma de trabajo: Windows XP, Windows Vista y Windows 7.


MÓDULO IV Aplica procesos de manufactura
asistido por computadora.
SUBMÓDULO MATERIALES DE APOYO DIDÁCTICO
Elabora piezas mecánicas por medio de CAD/CAM.
CENTRO DE MAQUINADO, TORNO Y FRESADORA CNC
Requerimientos:
Comandado desde una PC
Programación G&M ISO estándar
Que acepte instrucciones de múltiples paquetes de CAD
Que maquine acero, aluminio, cobre, ceras y plásticos
Guardas con interlocks de seguridad
Portaherramientas de cambio rápido
Que incluya software de programación, simulación y control
Que se pueda integrar a una FMS (celda de manufactura flexible) o CIM (sistema
de manufactura coordinado por computadora), es decir, debe ser posible cargar y
descargar automáticamente las piezas a maquinar.
Largo de la pieza a maquinar: (+ o –) 300 mm
Volteo sobre bancada: (+ o –) 200 mm
Recorrido en eje x : (+ o –) 150 mm
Recorrido en eje z: (+ o –) 230 mm
Velocidad del usillo: 4000 o 5000 rpm

Potencia del motor: 1000 o 1500 watts
Torreta automática
Alimentación de 110/220 volts a 60 hz
Si alguno de estos parámetros se sale de rango, consultar al consumidor ya que algunos
pueden ser flexibles.
BRAZO ROBÓTICO
Capacidad de carga DE 6 A 10 kg
Ejes: 6 (grados de libertad)
Grip de agarre proporcional al tamaño y capacidad
Adaptable a otros accesorios aparte de la grip (dispositivo para pintar, extremo magnético,
garra de mas de 2 “dedos”)
Repetibilidad ±0.05 mm
Rango de movimiento:
Rotación brazo Eje 1 ±160º
Movimiento brazo Eje 2 +140~-105º
Movimiento brazo Eje 3 +120~-155º
Giro muñeca Eje 4 ±270º
Movimiento muñeca Eje 5 ±145º
Rotación muñeca Eje 6 ±360º
Alcance aprox: 1,000 mm

-De competitiva velocidad de movimientos, con respecto a los modelos actuales
-Útil en operaciones de ensamble, despacho, empaquetado, manejo de material y
suministro
-Protegido contra colisión
-Fijación Suelo, techo, pared (opcional)
-Controlador robusto protegido y estándarizado
-Compatible con Windows CE
-Conectividad a través de Ethernet con protocolos como DeviceNet, ControlNet, Profibus-
DP y EtherNet/IP
-Alimentación eléctrica del conjunto controlador-robot de 110 o 220 volts 60 hz
-Software de programación, simulación y control, compatible con los líderes del ramo.
Herramientas
Taladro de piso con motor de hp que cumpla con las normas NOM Esmeril de piso con piedras de 10” grano fino y grueso que cumpla con las normas NOM Tornillo de banco con mordazas de 4” que cumpla con las normas NOM Vernier con pantalla digital escalas en mm y pulgadas que cumpla con las normas JIS Vernier con carátula indicadora en milésimas de pulgada, que cumpla con las normas JIS Micrómetro de exteriores de 0-1” que cumpla con las normas JIS Micrómetro de exteriores de 1-2” que cumpla con las normas JIS Micrómetro de exteriores de 2-3” que cumpla con las normas JIS Micrómetro de exteriores de 3-4” que cumpla con las normas JIS Micrómetro de interiores con juego de barras calibradas para varias medidas, que cumpla con las normas JIS Juego de dados de más de 200 pzas. Con extensiones, reducciones y (matraca) con garantía de por vida Juego de compás para interiores, exteriores, hermafrodita que cumpla con las normas JIS Extractor de baleros de 4 o más pares de quijadas rectas, con garantía de por vida Juego de escariadores con garantía de por vida Juego de escuadras universales que cumpla con las normas JIS Juego de indicadores de carátula con base magnética que cumpla con las normas JIS Juego de llaves Allen con garantía de por vida Juego de llaves españolas de ¼” a 1” largas cromadas con garantía de por vida Juego de desarmadores planos punta magnética cromo-vanadio, no menos de 6 pzas con garantía de por vida
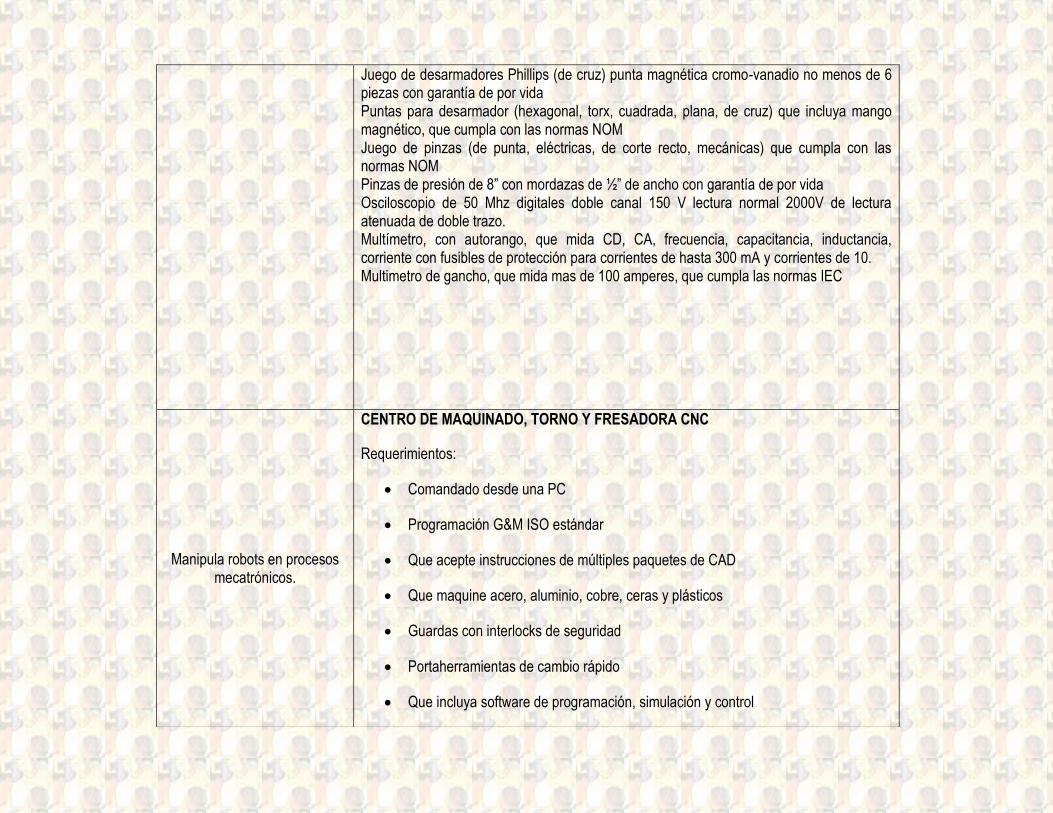
Juego de desarmadores Phillips (de cruz) punta magnética cromo-vanadio no menos de 6 piezas con garantía de por vida Puntas para desarmador (hexagonal, torx, cuadrada, plana, de cruz) que incluya mango magnético, que cumpla con las normas NOM Juego de pinzas (de punta, eléctricas, de corte recto, mecánicas) que cumpla con las normas NOM Pinzas de presión de 8” con mordazas de ½” de ancho con garantía de por vida Osciloscopio de 50 Mhz digitales doble canal 150 V lectura normal 2000V de lectura atenuada de doble trazo. Multímetro, con autorango, que mida CD, CA, frecuencia, capacitancia, inductancia, corriente con fusibles de protección para corrientes de hasta 300 mA y corrientes de 10. Multimetro de gancho, que mida mas de 100 amperes, que cumpla las normas IEC
Manipula robots en procesos mecatrónicos.
CENTRO DE MAQUINADO, TORNO Y FRESADORA CNC
Requerimientos:
Comandado desde una PC
Programación G&M ISO estándar
Que acepte instrucciones de múltiples paquetes de CAD
Que maquine acero, aluminio, cobre, ceras y plásticos
Guardas con interlocks de seguridad
Portaherramientas de cambio rápido
Que incluya software de programación, simulación y control

Que se pueda integrar a una FMS (celda de manufactura flexible) o CIM (sistema
de manufactura coordinado por computadora), es decir, debe ser posible cargar y
descargar automáticamente las piezas a maquinar.
Largo de la pieza a maquinar: (+ o –) 300 mm
Volteo sobre bancada: (+ o –) 200 mm
Recorrido en eje x : (+ o –) 150 mm
Recorrido en eje z: (+ o –) 230 mm
Velocidad del usillo: 4000 o 5000 rpm
Potencia del motor: 1000 o 1500 watts
Torreta automática
Alimentación de 110/220 volts a 60 hz
Si alguno de estos parámetros se sale de rango, consultar al consumidor ya que algunos
pueden ser flexibles.
BRAZO ROBÓTICO
Capacidad de carga DE 6 A 10 kg
Ejes: 6 (grados de libertad)
Grip de agarre proporcional al tamaño y capacidad
Adaptable a otros accesorios aparte de la grip (dispositivo para pintar, extremo magnético,
garra de mas de 2 “dedos”)
Repetibilidad ±0.05 mm
Rango de movimiento:
Rotación brazo Eje 1 ±160º

Movimiento brazo Eje 2 +140~-105º
Movimiento brazo Eje 3 +120~-155º
Giro muñeca Eje 4 ±270º
Movimiento muñeca Eje 5 ±145º
Rotación muñeca Eje 6 ±360º
Alcance aprox: 1,000 mm
-De competitiva velocidad de movimientos, con respecto a los modelos actuales
-Útil en operaciones de ensamble, despacho, empaquetado, manejo de material y
suministro
-Protegido contra colisión
-Fijación Suelo, techo, pared (opcional)
-Controlador robusto protegido y estándarizado
-Compatible con Windows CE
-Conectividad a través de Ethernet con protocolos como DeviceNet, ControlNet, Profibus-
DP y EtherNet/IP
-Alimentación eléctrica del conjunto controlador-robot de 110 o 220 volts 60 hz
-Software de programación, simulación y control, compatible con los líderes del ramo.
Herramientas
Taladro de piso con motor de hp que cumpla con las normas NOM Esmeril de piso con piedras de 10” grano fino y grueso que cumpla con las normas NOM Tornillo de banco con mordazas de 4” que cumpla con las normas NOM Vernier con pantalla digital escalas en mm y pulgadas que cumpla con las normas JIS Vernier con carátula indicadora en milésimas de pulgada, que cumpla con las normas JIS Micrómetro de exteriores de 0-1” que cumpla con las normas JIS Micrómetro de exteriores de 1-2” que cumpla con las normas JIS Micrómetro de exteriores de 2-3” que cumpla con las normas JIS
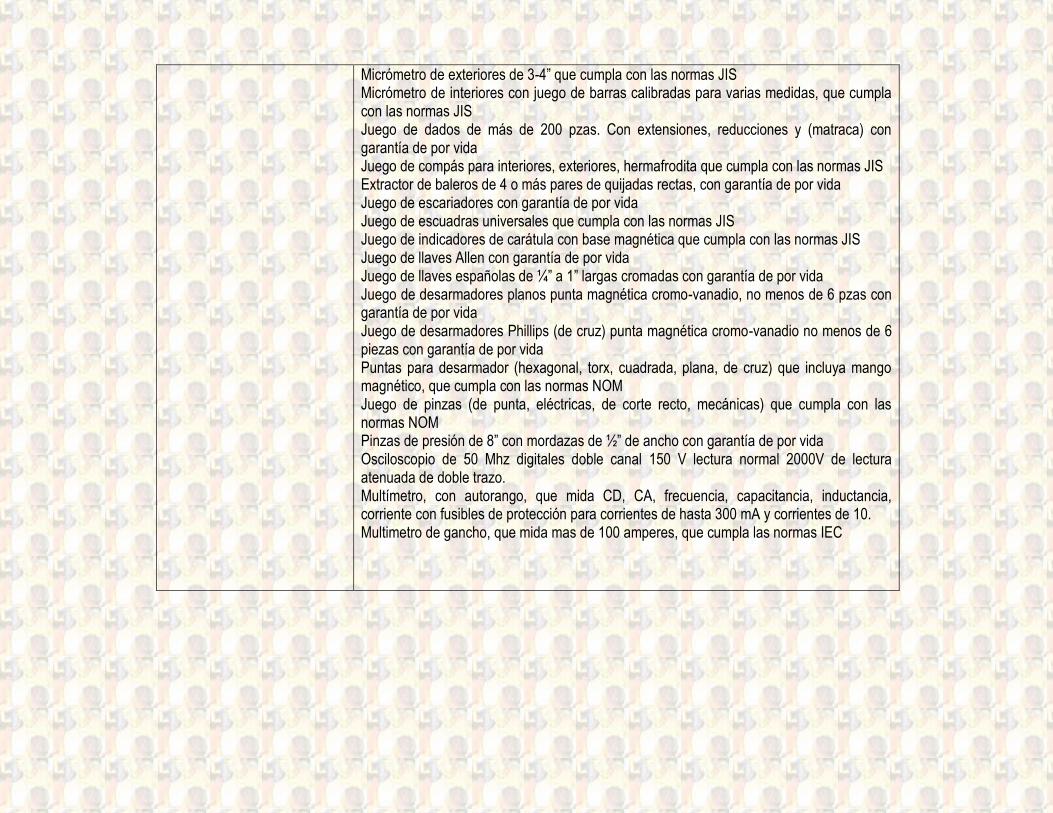
Micrómetro de exteriores de 3-4” que cumpla con las normas JIS Micrómetro de interiores con juego de barras calibradas para varias medidas, que cumpla con las normas JIS Juego de dados de más de 200 pzas. Con extensiones, reducciones y (matraca) con garantía de por vida Juego de compás para interiores, exteriores, hermafrodita que cumpla con las normas JIS Extractor de baleros de 4 o más pares de quijadas rectas, con garantía de por vida Juego de escariadores con garantía de por vida Juego de escuadras universales que cumpla con las normas JIS Juego de indicadores de carátula con base magnética que cumpla con las normas JIS Juego de llaves Allen con garantía de por vida Juego de llaves españolas de ¼” a 1” largas cromadas con garantía de por vida Juego de desarmadores planos punta magnética cromo-vanadio, no menos de 6 pzas con garantía de por vida Juego de desarmadores Phillips (de cruz) punta magnética cromo-vanadio no menos de 6 piezas con garantía de por vida Puntas para desarmador (hexagonal, torx, cuadrada, plana, de cruz) que incluya mango magnético, que cumpla con las normas NOM Juego de pinzas (de punta, eléctricas, de corte recto, mecánicas) que cumpla con las normas NOM Pinzas de presión de 8” con mordazas de ½” de ancho con garantía de por vida Osciloscopio de 50 Mhz digitales doble canal 150 V lectura normal 2000V de lectura atenuada de doble trazo. Multímetro, con autorango, que mida CD, CA, frecuencia, capacitancia, inductancia, corriente con fusibles de protección para corrientes de hasta 300 mA y corrientes de 10. Multimetro de gancho, que mida mas de 100 amperes, que cumpla las normas IEC

MÓDULO V Diseña y mantiene sistemas Mecatrónicos.
SUBMÓDULO MATERIALES DE APOYO DIDÁCTICO
Mantenimiento a sistemas mecatrónicos.
SISTEMAS INTELIGENTES DE MANUFACTURA ASITIDOS POR COMPUTADORA
(SIMAC)
Estaciones de trabajo del sistema SIMAC.
Consta las siguientes estaciones de trabajo con las características técnicas que se
indican a continuación.
Sistema de transferencia de Pallets
Descripción general:
BANDA TRANSPORTADORA Todos estos componentes se conectan con el PLC principal
vía ASI.
Características Técnicas
Especificaciones
Construcción: Perfil de Aluminio
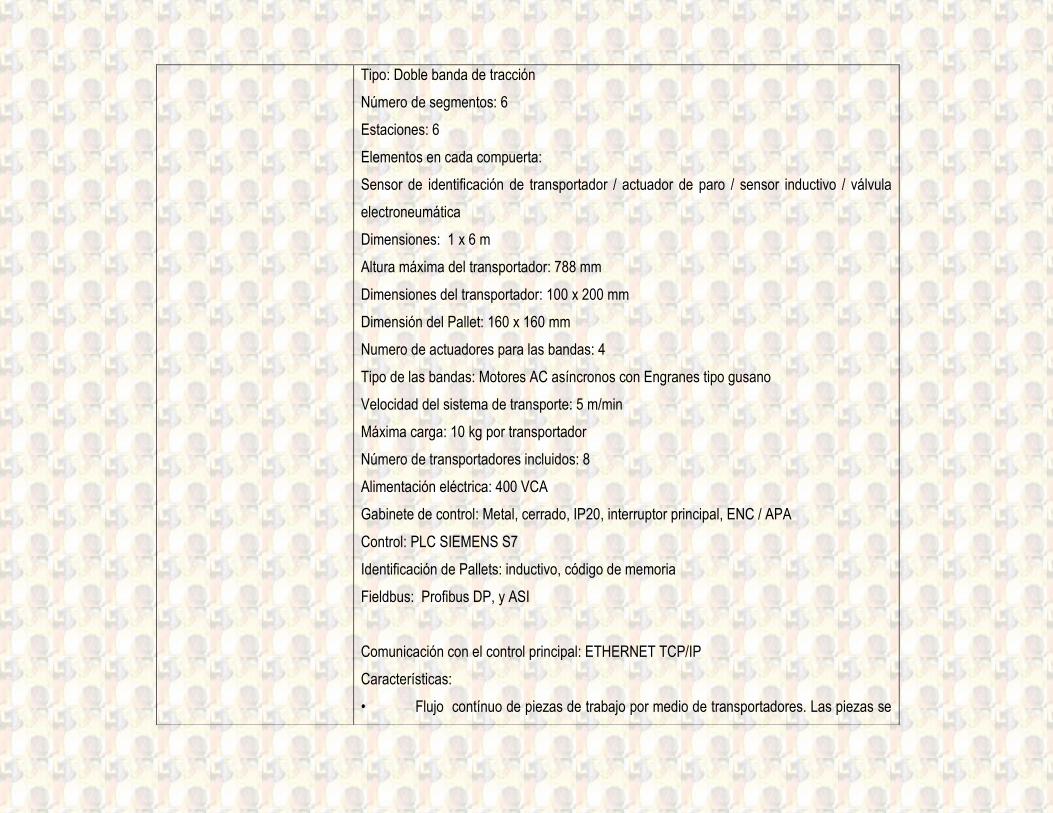
Tipo: Doble banda de tracción
Número de segmentos: 6
Estaciones: 6
Elementos en cada compuerta:
Sensor de identificación de transportador / actuador de paro / sensor inductivo / válvula
electroneumática
Dimensiones: 1 x 6 m
Altura máxima del transportador: 788 mm
Dimensiones del transportador: 100 x 200 mm
Dimensión del Pallet: 160 x 160 mm
Numero de actuadores para las bandas: 4
Tipo de las bandas: Motores AC asíncronos con Engranes tipo gusano
Velocidad del sistema de transporte: 5 m/min
Máxima carga: 10 kg por transportador
Número de transportadores incluidos: 8
Alimentación eléctrica: 400 VCA
Gabinete de control: Metal, cerrado, IP20, interruptor principal, ENC / APA
Control: PLC SIEMENS S7
Identificación de Pallets: inductivo, código de memoria
Fieldbus: Profibus DP, y ASI
Comunicación con el control principal: ETHERNET TCP/IP
Características:
• Flujo contínuo de piezas de trabajo por medio de transportadores. Las piezas se
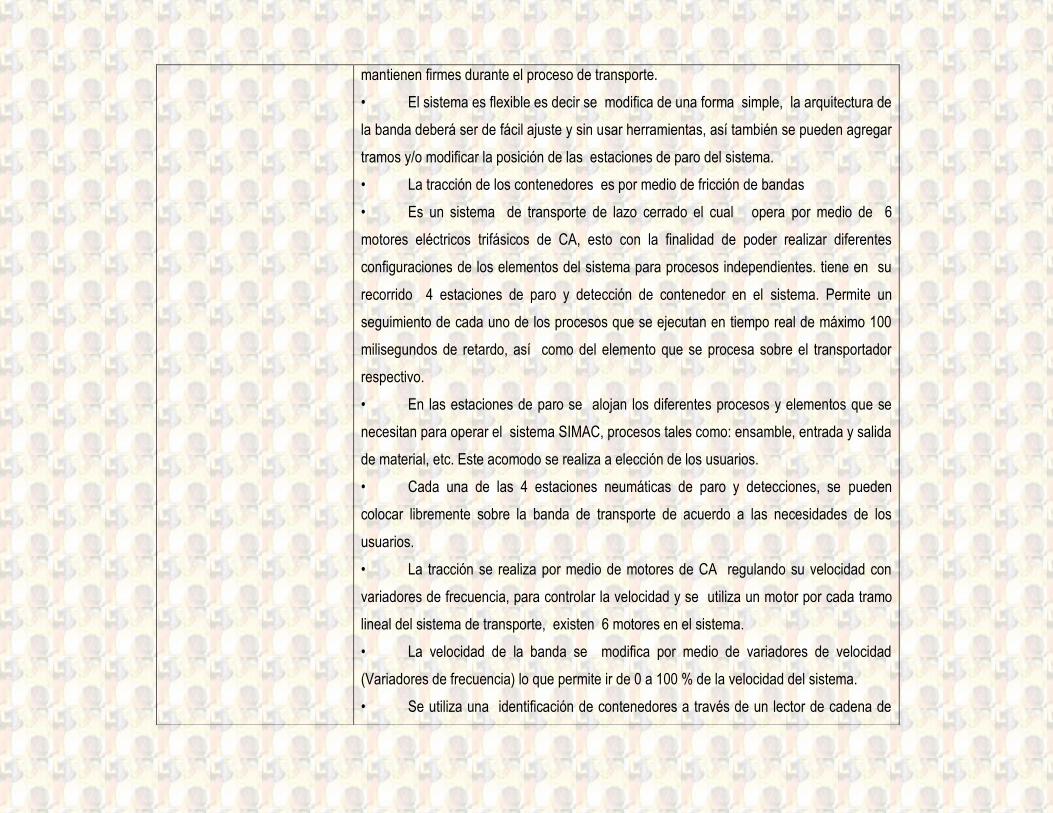
mantienen firmes durante el proceso de transporte.
• El sistema es flexible es decir se modifica de una forma simple, la arquitectura de
la banda deberá ser de fácil ajuste y sin usar herramientas, así también se pueden agregar
tramos y/o modificar la posición de las estaciones de paro del sistema.
• La tracción de los contenedores es por medio de fricción de bandas
• Es un sistema de transporte de lazo cerrado el cual opera por medio de 6
motores eléctricos trifásicos de CA, esto con la finalidad de poder realizar diferentes
configuraciones de los elementos del sistema para procesos independientes. tiene en su
recorrido 4 estaciones de paro y detección de contenedor en el sistema. Permite un
seguimiento de cada uno de los procesos que se ejecutan en tiempo real de máximo 100
milisegundos de retardo, así como del elemento que se procesa sobre el transportador
respectivo.
• En las estaciones de paro se alojan los diferentes procesos y elementos que se
necesitan para operar el sistema SIMAC, procesos tales como: ensamble, entrada y salida
de material, etc. Este acomodo se realiza a elección de los usuarios.
• Cada una de las 4 estaciones neumáticas de paro y detecciones, se pueden
colocar libremente sobre la banda de transporte de acuerdo a las necesidades de los
usuarios.
• La tracción se realiza por medio de motores de CA regulando su velocidad con
variadores de frecuencia, para controlar la velocidad y se utiliza un motor por cada tramo
lineal del sistema de transporte, existen 6 motores en el sistema.
• La velocidad de la banda se modifica por medio de variadores de velocidad
(Variadores de frecuencia) lo que permite ir de 0 a 100 % de la velocidad del sistema.
• Se utiliza una identificación de contenedores a través de un lector de cadena de

caracteres analógicos con lo que el sistema tiene una identificación única para cada
elemento.
• Se tiene además un panel de control con elementos luminosos de cada uno de
los diferentes puntos del sistema, en un gabinete en donde se encuentre alojado el control
lógico programable lo que permite tener un sistema de señalización de operación continua,
paso a paso y en caso que se presente una falla en el sistema. Adicionalmente se tiene
dispositivos de paro de emergencia para proteger al usuario del mismo.
• El monitoreo del sistema se realiza desde el control central (por medio de una PC
incluida) por medio de una interface gráfica, en donde se pueda observar el estado de
cada uno de los elementos que participan en el sistema, lo anterior permite el seguimiento
en línea y en tiempo real, máximo de 100 milisegundos de retardo, del mismo modo la
interface proporciona la información necesaria para corregir fallas menores hasta la
interacción del usuario si se requiere. El sistema maneja diferentes niveles de acceso,
desde monitoreo hasta cambio total de parámetros de ejecución, lo anterior deberá
realizarse por medio de un código de acceso.
El monitoreo, control y comunicación del sistema de transporte se realiza por medio de un
Controlador lógico programable con comunicación ETHERNET TCP /IP con las siguientes
características.
Tarjeta CPU con procesador de redundancia y procesamiento multitarea.
• Memoria principal de 64 Kbyte
• 21 K de memoria RAM para drivers e instrucciones de programa integrada
• 192 bloques de funciones.
• 192 llamadas de función.
• 255 bloques de datos.
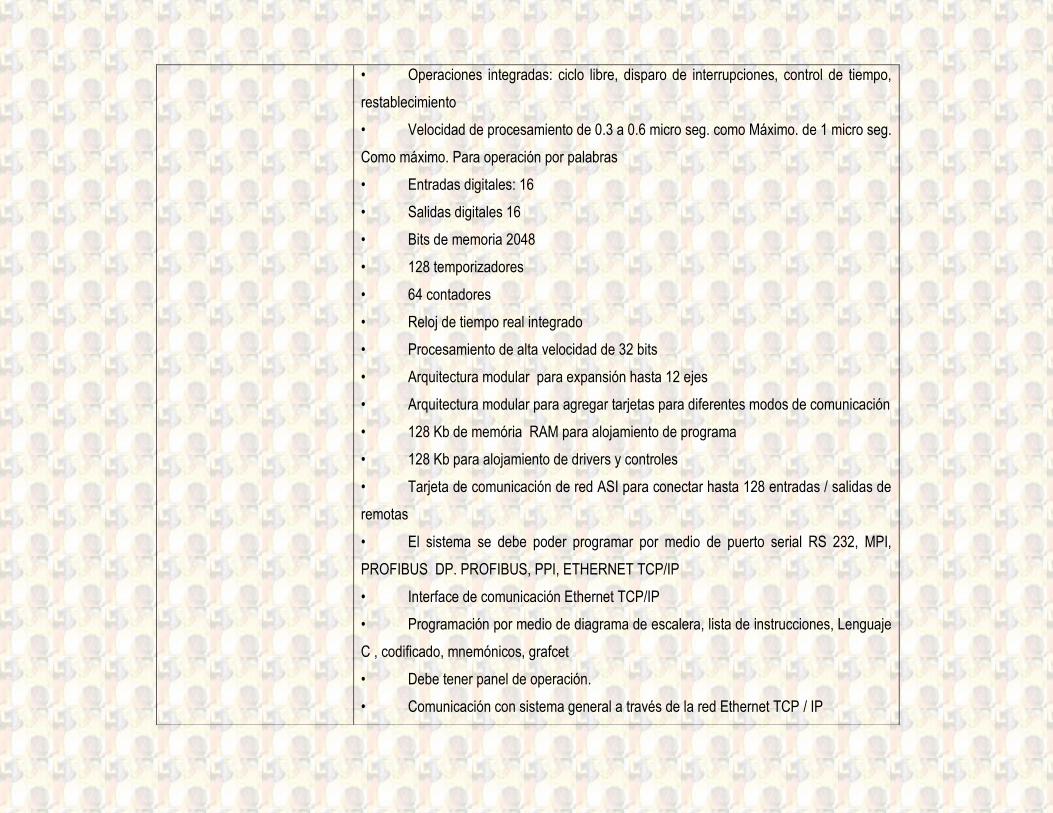
• Operaciones integradas: ciclo libre, disparo de interrupciones, control de tiempo,
restablecimiento
• Velocidad de procesamiento de 0.3 a 0.6 micro seg. como Máximo. de 1 micro seg.
Como máximo. Para operación por palabras
• Entradas digitales: 16
• Salidas digitales 16
• Bits de memoria 2048
• 128 temporizadores
• 64 contadores
• Reloj de tiempo real integrado
• Procesamiento de alta velocidad de 32 bits
• Arquitectura modular para expansión hasta 12 ejes
• Arquitectura modular para agregar tarjetas para diferentes modos de comunicación
• 128 Kb de memória RAM para alojamiento de programa
• 128 Kb para alojamiento de drivers y controles
• Tarjeta de comunicación de red ASI para conectar hasta 128 entradas / salidas de
remotas
• El sistema se debe poder programar por medio de puerto serial RS 232, MPI,
PROFIBUS DP. PROFIBUS, PPI, ETHERNET TCP/IP
• Interface de comunicación Ethernet TCP/IP
• Programación por medio de diagrama de escalera, lista de instrucciones, Lenguaje
C , codificado, mnemónicos, grafcet
• Debe tener panel de operación.
• Comunicación con sistema general a través de la red Ethernet TCP / IP
• Fuente de alimentación 230VCA/24VCD, 5A
• Dispositivo de protección mecánica para paro de emergencia
• El software opera sobre plataformas que permitan programar desde un
procesador independiente hasta un grupo de PLC conectados en red a través de la red
PROFIBUS DP, FMS o ETHERNET TCP/IP. Además el software incluye una librería de
simulación del comportamiento del CPU, para que el riesgo de error o falla se minimice en
el sistema.
• El sistema deberá estar dotado de la comunicación por medio de servicio remoto
(Tele servicio) vía módem para diagnostico y solución de fallas en todas y cada una de las
estaciones del sistema.
• Terminal de válvulas con conexión directa a la interface ASI.
• Gabinete de control de PLC.
• Panel de control y monitoreo.
• Estaciones de paro.
• Unidades de sujeción.
Desviadores
• Sensores de identificación de transportadores utilizando un código de
identificación único en cada elemento del sistema.
Transportadores de piezas de trabajo
• Elementos están montados sobre una base robusta de aluminio anodizado.
• El sistema deberá ser libremente configurable y expandible debido a su estructura
modular. Los sistemas de paro, unidades de sujeción y desviadores del sistema se pueden
agregar al sistema sin problemas, para poder reconfigurar por completo el SIMAC.
• Filtro regulador para tratamiento de aire comprimido para eliminar impurezas con

filtro de 5 micras o menor, eliminar humedad y controlar la presión de operación de la
estación con un rango de 0-16 bar con rosca de 1/8 G para la conexión con una válvula
neumática de 3 vías y 2 posiciones (3/2) de cierre de alimentación.
Periféricos del sistema
Panel de control
• El panel de control por medio de botones, selectores y señales luminosas
normalizadas de acuerdo a la norma europea DIN. En este panel se informa sobre las
condiciones de operación del sistema así como la integración al sistema SIMAC o la
operación de manera individual según se considere.
Gabinete de control
• Todos los elementos de control y conexión del sistema se encuentran dentro de un
gabinete el cual deberá estar construido bajo norma internacional (IP). Cada uno de los
elementos están identificados de acuerdo a normalización internacional considerando
puntos de conexión, color de los conductores eléctricos, protección en puntos de alto
voltaje y protección mecánica de energización por medio de un relevador electromecánico.
o
Almacén Automático / Sistema de Recuperación AS/RS.
Descripción general:
Sistema de Almacenamiento Automático y Sistema de Recuperación (AS/RS) debe tener
los siguientes componentes principales
• La estructura es metálica para los contenedores.
• El robot tipo cartesiano con su controlador.
Ambos, la estructura y el robot cartesiano son de uso industrial, de alta precisión y un bajo
mantenimiento. Los pallets se mueven por medio de un gripper telescópico especial con el
movimiento hacia el contenedor y hacia el sistema de transporte. Los tres ejes del robot
son sistemas de control de lazo cerrado, por medio de encoders increméntales en cada
uno de los ejes. Las posiciones del sistema AS/RS se pueden grabar fácilmente por medio
de un teach pendant y posteriormente se pueden enviar a la memoria del PLC. La
comunicación con el control del sistema SIMAC se realiza por medio de Ethernet TCP/IP.
Características técnicas mínimas del sistema
El Sistema automático de control de materiales se alimenta por medio de un sistema de
robot de coordenadas cartesianas, se controla y administra todos los materiales que
participan dentro de los procesos del SIMAC y se cumple con las siguientes características
mínimas.
• Matriz de 8 columnas por 5 filas de forma rectangular con 40 posiciones físicas de
almacenamiento, más 6 posiciones operativas del sistema. El control de posicionamiento y
administración de las posiciones del almacén cartesiano se realizan por medio de un
control lógico programable El sistema físico del almacén cartesiano se puede
administrar y controlar desde un sistema de base de datos bajo plataforma operativa SQL,
la cual deberá estar instalada en una computadora personal incluida. El enlace entre la PC
y el sistema se realizan por medio de una red de datos industriales Ethernet TCP / IP la
cual es una red estandarizada, homologada y abierta para expansiones futuras.
• La base de datos deberá administrar las posiciones del almacén por medio de
códigos de número de parte de cada producto que se ingresa al almacén. Estos números
se seleccionan libremente por el usuario. Todas las posiciones del almacén son

monitoreadas en línea y tiempo real (máximo 100 milisegundos de retardo) realizando una
correlación entre lo que se tiene ingresado en la base de datos y lo que se encuentra
físicamente en el almacén con lo que el “sistema adquiere un grado de inteligencia” que
evitará se ejecuten procesos que queden incompletos así como la ejecución de procesos
con partes o productos erróneos.
• Para verificar la presencia de piezas en cada una de las posiciones del almacén, el
sistema deberá utiliza sensores ópticos de reflexión directa el cual determina si existe
pieza en la posición deseada, lo anterior debe concordar con la base de datos del almacén
lo que genera un grado de inteligencia superior del mismo.
Especificaciones técnicas
• Numero de celdas de Alm. : 40
• Sistema de palletes : contenedores 164 x 164 mm
• Carga nominal de material : 3 Kg.
• Carga máxima : 10 Kg.
• Método de sujeción : telescópico, bidireccional
• Motor eje X : servomotor, 24 VCD
• Encoder eje X :500 Incr./ A/B/I
• Z-axis motor :servomotor, 24 VDC
• Encoder eje Z :500 Incr./ A/B/I
• Motor Telescopio : servomotor, 24 VCD
• Encoder Telescopio : 500 Incr./ A/B/I
• Seguridad Telescopio :embrague limitador de torque
• Drives eje X/Z- :Servomotores de banda dentada

• Repetibilidad : +/- 0.04 mm
• Desplazamiento Horizontal : 1800 mm
• Desplazamiento Vertical :1500 mm
• Dimensiones (LxAxAl) : 2180 x 680 x 1720 mm
Descripción de periféricos
• Un Teach pendant (caja de enseñanza para bahías del almacén) para control de 4
ejes.
• Un controlador para 12 ejes.
• 3 servomotores de CD.
• 3 sistemas de transmisión tipo planetario.
• Sistema de transmisión por rodamientos para los ejes cartesianos.
• El sistema se programa fuera de línea o en línea.
• El sistema opera de modo automático o manual.
• El sistema opera de manera independiente o integrada al sistema SIMAC con 4
paros de emergencia distribuidos a lo largo del almacén para seguridad del usuario.
• Detección de bahías por medio de sensores ópticos de reflexión directa.
• El monitoreo, control y comunicación del almacén se realiza por medio de un PLC
con comunicación PROFIBUS DP y ETHERNET Deberá poder integrarse a una red de
PLC.
Características del controlador del almacén
El sistema de control de lazo cerrado de comunicación del almacén logístico, incluye:
• Procesador de alta velocidad de 64 bits.
• Capacidad para monitorear hasta 10 ejes.
• Arquitectura abierta para expansión.
• Algoritmos de programación PID.
• La memoria flash del sistema es de de 2 Mb y 512 Kb de remanentes.
• 6 Mb de memoria RAM para ejecución de lenguajes de programación.
• Capacidad de instalación de 8 puertos seriales de RS 232 con velocidad de 115.2
Kb.
• Con sistema de batería de respaldo SRAM.
• Recepción de señales de encoders.
• Datos de sistema con memoria propia para realizar lazos de control de potencia
del sistema.
El control lógico programable del sistema AS/RS deberá incluir.
• Tarjeta CPU S7-300 con procesador de redundancia y procesamiento multitarea.
• Memoria principal de 64 Kbyte.
• 21 K de memoria RAM para drivers e instrucciones de programa integrada.
• 192 bloques de funciones.
• 192 llamadas de función.
• 255 bloques de datos.
• Operaciones integradas: ciclo libre, disparo de interrupciones, control de tiempo,
restablecimiento.
• Velocidad de procesamiento de 0.3 a 0.6 micro seg. como Máximo. Para bits y de
1 micro seg. Como máximo. Para operación por palabras.
• Entradas digitales: 16.
• Salidas digitales 16.
• Bits de memoria 2048.
• 128 temporizadores.
• 64 contadores.
• Reloj de tiempo real integrado.
• Procesamiento de alta velocidad de 32 bits.
• Arquitectura modular para expansión hasta 12 ejes.
• Arquitectura modular para agregar tarjetas para diferentes modos de comunicación
• Control PID.
• 128 Kb de memoria RAM para alojamiento de programa.
• 128 Kb para alojamiento de drivers y controles.
• Tarjeta de comunicación de red ASI para conectar hasta 128 entradas / salidas de
remotas.
• El sistema se deberá de poderse programar por medio de puerto serial RS 232,
MPI, PROFIBUS DP. PROFIBUS, PPI, ETHERNET TCP/IP
• Interface de comunicación Ethernet TCP/IP.
• Programación por medio de diagrama de escalera, lista de instrucciones, Lenguaje
C , codificado, mnemónicos, grafcet.
• Deberá tener panel de operación.
• Comunicación con sistema general a través de la red Ethernet TCP / IP
• Fuente de alimentación 230VCA/24VCD,
• Dispositivo de protección mecánica para paro de emergencia.
• El software se opera sobre plataformas que permitan programar desde un
procesador independiente hasta un grupo de PLC conectados en red a través de la red
PROFIBUS DP, FMS o ETHERNET TCP/IP. Además el software incluye una librería de
simulación del comportamiento del CPU, para que el riesgo de error o falla se minimice.
• El sistema esta dotado de la comunicación por medio de servicio remoto (Tele
servicio) vía módem para diagnostico y solución de fallas en todas y cada una de las
estaciones del sistema.
Panel de operación
• Tiene comunicación con sistema general a través de la red PROFIBUS DP
• Fuente de alimentación 230VCA/24VCD, 5 amp.
• Tiene un dispositivo de protección mecánica para paro de emergencia
Amplificadores de potencia para cada uno de los ejes del sistema
• Cada uno de los ejes del sistema debe de contar con amplificadores de potencia
con algoritmo PID el cual es adicional al algoritmo PID que se tiene en la tarjeta del PLC.
El objetivo de estos amplificadores es generar un óptimo desempeño del sistema, el
amplificador deberá regular los siguientes parámetros:
o Offset del sistema.
o Ganancia proporcional.
o Linealidad de operación.
o Corriente de arranque.
o Corriente máxima.
• El software operara sobre plataformas que permitan programar desde un
procesador independiente hasta un grupo de PLC conectados en red a través de la red
PROFIBUS DP o FMS. Además el software incluirá una librería de simulación del
comportamiento del CPU, para que el riesgo de error o falla se minimice.

• El sistema estará dotado de la comunicación por medio de servicio remoto (Tele
servicio) vía módem para diagnostico y solución de fallas en todas y cada una de las
estaciones del sistema.
Características Adicionales
• El sistema operara de manera independiente o integrada al sistema SIMAC de
acuerdo a las necesidades del usuario. tiene un dispositivo de protección mecánica para
paro de emergencia.
Panel de control
• Panel de control por medio de botones, selectores y señales luminosas
normalizadas de acuerdo a norma internacional ISO y norma europea DIN. En este panel
informa sobre las condiciones de operación del sistema así como la integración al sistema
SIMAC o la operación de manera individual según se considere.
Gabinete de control
• Todos los elementos de control y conexión del sistema se encontraran dentro de
un gabinete el cual está construido bajo norma internacional (IP). Cada uno de los
elementos estos identificados de acuerdo a normalización internacional considerando
puntos de conexión, color de los conductores eléctricos, protección en puntos de alto
voltaje y protección mecánica de energización por medio de un relevador electromecánico.
Documentación técnica
Todos y cada uno de los componentes, elementos sensores actuadores estarán

documentados. Por otra parte cada una de las estaciones deberá contar con su
documentación técnica divida en los siguientes volúmenes:
• Elementos Mecánicos.
• Elementos eléctricos.
• Descripción pieza a pieza.
• Descripción de la estación en conjunto.
• Diagramas eléctricos de todos y cada uno de los circuitos del sistema.
• Colección de ejercicios para operación individual del sistema.
Centro de fresado CNC
El Control:
La máquina es controlada por una computadora personal. En esta computadora se debe
simular los diferentes controles disponibles y reconocidos en la industria por medio del
software de CNC CAD/CAM. Este software corresponde al funcionamiento y operación
del sistema de control real con la posibilidad de cambiar a diferentes controles únicamente
instalando el software adicional y la carátula correspondiente. El operador puede trabajar
con el control original y puede fácilmente familiarizarse con otros sistemas de control tales
como:
• SIEMENS
• GE FANUC
• EMCOTRONIC

Automatización:
Para la integración de los sistemas SIMAC, la maquina CNC esta equipada con todos los
accesorios e interfaces necesarias, tales como: Unidad de sujeción neumática, puerta
automática, interfase robótica y Puerto de comunicación DNC.
Especificaciones técnicas mínimas
1. Área de trabajo:
• En eje X 300-mm
• En eje Y 200-mm
• En eje Z 200 mm,
• Golpe efectivo en Z 100 mm
2. Dimensión de la tabla:
• (L x A) 480x180 mm,
• carga max. 20 Kg., Con 3 ranuras de 12 mm, con 45 mm de distancia entre ellas
3. Motor principal:
• Motor asíncrono de CA. a 440 volts
• Potencia de 2,5 kW al (60%).
• Regulación de velocidad continua.
4. Rango de velocidad
• 0-8000 rpm
5. Alimentador de ejes:
• Motor de 3 fases a pasos,
• Resolución por pasos 1.25 micras

6. Repetitibilidad de posición acc. VDI 3441
• Eje X 0.003,
• Eje Y 0.003,
• Eje Z 0.004
7. Avance Rápido transversal
• 7,5 m/min en eje X-Y y Z
8. Máxima fuerza de alimentación
• 2500 N (en eje X-Y y Z )
9. Sistema de herramienta:
• Torreta tipo tambor con lógica direccional
• Características de sujeción, ISO 30 o similar a norma DIN 2079
• Número de herramientas: 20
10. Sistema de lubricación:
• Guía con lubricación central de aceite
• Lubricación del husillo principal
11. Conexión eléctrica:
• 400 V, 3/N/PE, 50/60 Hz,
• Carga de conexión de la maquina 5 kVA
• Fusibles principales de la máquina 20 A
12. Automatización:
• Dispositivo de sujeción automático.
• Puerta automática
• Interface DNC
• Interface robótica

• Interface para un sistema AVG
13. Control CNC:
• Basado en control por software de PC- el cual emula el control SIEMENS
SINUMERIC 840D y la serie De controladores 21 de FANUC
14. Control de PC:
• CPU core duo 5700
• 4 GB RAM, disco duro de mínimo 20 GB
• 12" TFT pantalla plana
15. Dimensiones:
• 1502 x 1284 x 1875 mm (L x A x Al)
16. Peso:
• Máximo 1000 kg
Centro de Torneado CNC
El Control:
La máquina se controla por una PC convencional. En esta computadora se puede simular
los diferentes controles disponibles y reconocidos en la industria por medio del software de
CNC CAD/CAM. Este software corresponde al funcionamiento y operación del sistema de
control real con la posibilidad de cambiar por diferentes controles únicamente instalando el
software adicional. El operador puede trabajar con el control original y puede fácilmente
familiarizarse con otros sistemas de control tales como:
• SIEMENS
• GE FANUC
• EMCOTRONIC
Automatización
Para la integración de los sistemas SIMAC, la maquina CNC esta equipada con todos los
accesorios e interfaces necesarias, tales como: Unidad de sujeción neumática, puerta
automática, interfase robótica y puerto de comunicación DNC.
Especificaciones técnicas mínimas
1. Área de trabajo:
• Altura entre centros 125 mm,
• Distancia entre centros 405 mm
• Volteo sobre la bancada 250 mm
• Volteo sobre carro para refrentar 85 mm
• Carrera de desplazamiento X/Y 100/300
2. Husillo principal:
• Taladro de plato Ø 20,7 mm
• Diámetro máximo paso de barra Ø 18 mm
3. Motor principal:
• Motor asíncrono trifásico, 2,8 Kw. (al 60%), a 440 volts

• Regulación continua de velocidad
• Rango de velocidad 0-4000 rpm
4. Alimentador de ejes:
• Motor a pasos de 3-fases, resolución de paso. 1.25 micras
• Repetitibilidad de posición según VDI 3441, eje X 0,003, eje Z 0,004
• Avance rápido 7,5 m/min. (en eje X-y Z )
• Alimentación en 0-4 m/min. (en eje X-y Z)
• Máxima fuerza de alimentación 2500 N (en eje X- y Z)
5. Sistema de herramientas:
• Torreta programable
• Con características de sujeción , ISO 30 o similar a norma DIN 2079
• Numero de herramientas: 12
6. Sistema de lubricación:
• Lubricación central con aceite.
• Cojinete del husillo principal lubricado con grasa de por vida
7. Conexión eléctrica:
• 400 V, 3/N/PE, 50/60 Hz,
• Carga de conexión de la maquina 5 KVA.
• Fusibles principales de la máquina 20 A
8. Automatización:
• Dispositivo de sujeción automático,
• Puerta automática
• Interface DNC,
• Interface robótica

9. Control CNC:
• Basado en control por software de PC- el cual emula el control SIEMENS
SINUMERIC 840D o la serie de controladores 21 de FANUC u otros.
10. Control de PC:
• CPU Pentium IV, 64 MB RAM
• Disco duro mínimo de 20 GB
• 12" TFT pantalla plana
11. Dimensiones:
• 1628 x 1174 x 1750 mm (L x A x Al)
12. Peso :
Máximo 700 kg.
Sistema de Alimentación con Robot y eje lineal para las máquinas CNC
Descripción general:
El sistema de alimentación con Robot de 6 grados de libertad es un sistema
completamente industrial, de alta precisión y alto desempeño. La alimentación de las
maquinas de CNC torno y fresa, se realiza por medio de un robot industrial de 6 grados
de libertad montado sobre un eje lineal.
El eje lineal fabricado de un marco de base de aluminio rígido, provisto con un eje de
tracción lineal, con rodamientos precargados para obtener un movimiento suave y preciso.
Deberá incluir sistema de almacenamiento temporal así como almacenes locales para
materia prima, se asegura el funcionamiento independiente del ciclo de flujo de material
en la estación para operación independiente y también es posible manejar la estación
completamente integrada al SIMAC.
Especificaciones técnicas mínimas.
La estación de alimentación de las máquinas de CNC deberá incluir:
• Robot de 6 grados de libertad
• Eje lineal
• Control del sistema
Robot Industrial alimentador de maquinas de CNC de 6 grados de libertad con las
siguientes características:
Construcción : brazo articulado vertical
Numero de ejes: seis (6)( articulación tipo revolución)
Gripper : eléctrico
Carga máxima : 2 kg incluyendo el gripper
Repetibilidad : +/- 0.04 mm
Velocidad resultante : 3500 mm/seg (máxima)
Método de control y accionamiento:
Eléctricos AC con variadores de frecuencia,
E encoders absolutos para cada articulación
Fuerza de sujeción : Máxima de 34.3N, ajustable
Tipo de protección : IP 54
Algoritmo de control : PID Transmisión armónica
Unidad de control del robot
Interfaces : Ethernet TCP / IP,: paralelo (Centronics): serial (RS 232C)
Entradas / Salidas: 16 entradas/16 salidas expandibles a 60/48
Programación: Por teach pendant (caja de enseñanza) con display LCD de 4 líneas a vía
PC
Numero de programas : Hasta 128
Capacidad de memoria :
Alrededor de 5000 pasos por programa (grabación de posiciones.)
Funciones principales :
Interpolación de articulaciones, interpolación lineal 3 dimensiones, interpolación circular,
paletizado, control por interrupciones condicionales, saltos, subrutinas.
El sistema podrá operar de modo multitarea con capacidad de operación de todos los
programas (64) de modo simultáneo.
Eje lineal de alimentación de maquinas CNC:
El eje lineal movido por medio de un motor eléctrico, con transmisión de potencia por
medio de un moto-reductor de banda dentada, con operación por sistema servo con alta
precisión, con las siguientes características:
• El eje lineal es un sistema de banda dentada para transmisión, servomotor de CD
con encoder incremental para detección de posición
• Longitud: 1600 mm
• Precisión: +/- 0.5 mm
• Repetibilidad: +/- 0.04mm

Las posiciones asignadas del eje lineal se asignaran por medio de un teach pendalt que
opera desde el panel central con un permiso por medio de llave. Lo anterior se realiza en
línea o fuera de línea y permite la enseñanza de por lo menos 15 posiciones de manera
directa las cuales son libremente configurables y el registro de cada una de las posiciones
se realiza por medio de una interface gráfica con las lámparas del juego de botones del
panel central.
Unidad de control del sistema de alimentación del robot y del eje lineal
• Tarjeta CPU S7-300 con procesador de redundancia y procesamiento multitarea.
• Memoria principal de 64 Kbyte
• 21 Kb. de memoria RAM para drivers e instrucciones de programa integrado
• 192 bloques de funciones,
• 192 llamadas de función,
• 255 bloques de datos
• Operaciones integradas: ciclo libre, disparo de interrupciones, control de tiempo,
restablecimiento, velocidad de procesamiento de 0.3 a 0.6 micro seg. o menor, para bits y
de 1 micro seg. o menor. para operación por palabras.
• Entradas digitales: 24
• Salidas digitales 24
• Bits de memoria 2048
• Temporizadores: 128
• Contadores: 64
• Reloj de tiempo real integrado
• Procesamiento de alta velocidad de 32 bits
• Arquitectura modular para expansión hasta 12 ejes
• Arquitectura modular para agregar tarjetas para diferentes modos de
comunicación.
• control PID
• 128 Kb de memoria RAM para alojamiento de programa
• 128 Kb para alojamiento de drivers y controles
• Tarjeta de comunicación de red ASI para conectar hasta128 entradas / salidas
remotas.
• El sistema se deberá de programar por medio del puerto serial RS 232, MPI,
PROFIBUS DP. PROFIBUS PPI, interface de comunicación PROFIBUS FMS, ETHERNET
• Programación por medio de diagrama de escalera, lista de instrucciones, Lenguaje
C codificado, mnemónicos y grafcet.
• Panel de operación
• Comunicación con sistema general a través de la red PROFIBUS DP y
ETHERNET
• Fuente de alimentación 230VCA/24VCD, 5A
• Dispositivo de protección mecánica para paro de emergencia
• Cada uno de los ejes del sistema cuenta con amplificadores de potencia con
algoritmo PID, el cual es adicional al algoritmo PID que se tiene en la tarjeta del PLC. El
objetivo de los amplificadores es un optimo desempeño del sistema, el amplificador regula
los siguientes parámetros:
o Offset del sistema,
o Ganancia proporcional
o Linealidad de operación
o Corriente de arranque
o Corriente máxima
• El software operara sobre plataformas que permitan programar desde un
procesador independiente hasta un grupo de PLC conectados en red a través de la red
PROFIBUS DP o ETHERNET. Además el software deberá incluir una librería de simulación
del comportamiento del CPU, para minimizar el riesgo de error o falla.
• El sistema estará dotado de la comunicación por medio de servicio remoto (Tele
servicio) vía módem para diagnostico y solución de fallas en todas y cada una de las
estaciones del sistema.
Características Adicionales
El sistema opera de manera independiente o integrada al sistema SIMAC de acuerdo a las
necesidades de los usuarios, y deberá tener un dispositivo de protección mecánica para
paro de emergencia.
Gabinete de control
Todos los elementos de control y conexión del sistema se instalaran dentro de un
gabinete construido bajo normas internacionales (IP) cada uno de los elementos estará
identificado de acuerdo a normas internacionales considerando puntos de conexión, color
de los conductores eléctricos, protección en puntos de alto voltaje y protección mecánica
de encendido por medio de un relevador electromecánico.
Documentación técnica
Todos y cada uno de los componentes, elementos Sensores y Actuadores estarán

documentados en el sistema general. Por otra parte cada una de las estaciones cuenta
con su documentación técnica divida en los siguientes volúmenes:
• Elementos Mecánicos
• Elementos eléctricos
• Descripción pieza a pieza
• Descripción de la estación en conjunto
• Diagramas eléctricos de todos y cada uno de los circuitos del sistema
• Conjunto de ejercicios para la operación individual del sistema
Estación de ensamble con robot
Descripción general:
La estación de ensamble con robot tendrá un robot industrial, de alta precisión de 5
grados de libertad, montado en una estación de trabajo típica para las tareas de
ensamble. Realizando ensambles de diferentes sistemas, en combinación con un
sistemas de visión, esto para cubrir todos los niveles de complejidad.
Para los proyectos especiales de los estudiantes, en la estación existirá espacio adicional
suficiente para que la celda pueda ser estructurada para manejar otras piezas de trabajo,
siempre y cuando estén dentro del espacio de trabajo del robot.
La célula de ensamble con el robot estará integrado como parte del sistema SIMAC y
también puede ser utilizada de forma individual.
Especificaciones técnicas de la estación de ensamble con robot
Estación de trabajo
Construcción:
Perfiles de aluminio, placas perfiladas de aluminio, puertas con cerradura para apertura y
cierre
Eléctrica:
Sistema de relevador para paro de emergencia
Interface de conexión (Distribución I/O y señalización)
Panel de Operación:
START/STOP/RESET/STATUS/EMERGENCY STOP
Dimensiones mínimas.
L/A/Al = 1100/700/788 mm
Almacenes Temporales:
3 para las piezas en proceso
Sujeción del dispositivo de ensamble:
Unidad de sujeción neumática X/Y
Número de estaciones de buffer para pallets: 4
Interface con el robot:
SysLink (digital I/O)
Interface neumática:
Bloque de válvulas , 3 Válvulas que apliquen al sistema.
Unidad de mantenimiento neumática
Sensores: 4 sensores inductivos
2 sensores de presión neumática
4 sensores de fin de carrera para actuador tipo magnético
Alimentación eléctrica: 230 VCA / 50-60Hz / 2 Amp.

Suministro de aire comprimido: 6 - 8 bar / 20 l/min
Brazo de robot
Tipo: Vertical articulado
Grados de libertad : 5
Carga máxima: 2 kg
Alcance del robot, al punto del gripper: 410 mm
Rotación de la articulación de la base: 300 grados
Repetibilidad: +/- 0,02 mm
Motores principales: AC Servo, lazo cerrado
Velocidad (máx.): 2,1 m/s
Gripper: Neumático dedos paralelos
Peso del brazo robot: 17 kg.
Controlador del Robot
Número de programas: 88
Posiciones por programa: 2 500
Multitarea: Si
Función de paletizado: Si
Modos de Interpolación: PTP y CP
Procesador: 64bit RISC y DSP
Programación: Teach Box / PC
Número de señales digitales I/O: 16/16
Comunicación: RS232 / Ethernet / digital punto a punto
Suministro de energía eléctrica: 207 - 253 V AC, 1 / N / PE
Rango de consumo de potencia: 3,5 kVA / 0,9 kVA

Sistema de visión para control de calidad con robot
El sistema realizara múltiples funciones tales como: un ensamble completo y preciso,
encontrando posiciones y orientaciones de las diferentes piezas a ensamblar, realizar
mediciones, etc. La cámara es una unidad compacta e inteligente, con un procesador de
imágenes incluido e interface Ethernet. Debido al alto desempeño y la velocidad de la
interfase, la cámara se puede comunicar al controlador del robot y también a una PC.
La cámara combina la última tecnología CMOS para imágenes junto con el software para
procesamiento, juntos forman una poderosa herramienta de inspección.
El sistema es a color.
El sistema ofrecer conectividad Ethernet para realizar diagnósticos remotos, solución de
fallas en cualquier parte, utilizando la red de comunicación Internet TCP/IP.
Incluye software de procesamiento de imágenes.
Especificaciones del sistema de visión mínimas

Sistema de procesamiento de imagines con cámara CCD
• El sistema de control de calidad por sistema de visión realizara un estricto
seguimiento de los diferentes procesos que se ejecutan en el sistema de ensamble flexible,
realiza la inspección a una gran variedad de elementos, realizando programaciones fuera
de línea para cada uno de los procesos operativos.
• El sistema se integrara fácilmente a cualquier sistema de producción, ya sea por
medio de una interfase PTP o por una red de comunicación de PC's
• El algoritmo de control realiza el análisis de cada una de las necesidades de
medición, lo realiza por medio de un procesador digital de señales (DSP) el cual procesa
señales a alta velocidad de cada una de las imágenes adquiridas por el sistema.
• El sistema analiza elementos en 2D con una cámara. y se integra a cualquier
dispositivo de control industrial por medio de entradas y salidas a 24 VCD.
El sistema de procesamiento de imágenes y evaluación de componentes tendrá los
siguientes elementos:
• Unidad de procesamiento de imágenes
• Interfase de comunicación Ethernet TCP / IP
• Sistema de interfase por entradas salidas, 8 entradas, 8 salidas
• Cuatro salidas de video
• Formatos de video: RS 170, CCIR, NTSC.
• Resolución de conversión 16 bits
• Memoria 32 kb expandible
• Cámara a color CCD con objetivo incluido
• Monitor LCD de color de 15"
• Tablero y ratón

• Sistema de protección obscura para toma de imágenes
• Cables y elementos de conexión
• Sistema de iluminación infrarroja.
• Sistema de control electrónico.
• Control de iluminación de acuerdo al cuerpo a medir (se deberá instalar y
desarrollar de acuerdo al tipo de piezas del sistema).
Características técnicas mínimas
Resolución 640 x 480 píxeles
Procesador Hitachi SH4
Sensor de imagen CCD formato 1/3”
Imágenes por segundo 30
Velocidad Alta velocidad
Memoria Flash 16 MB
Memoria RAM 64 MB
Aplicaciones Todas las que requieran análisis de color o inspeccionar cambios
de color
Brazo de robot
Tipo: Vertical articulado
Grados de libertad : 5
Carga máxima: 2 kg
Alcance del robot, al punto del gripper: 410 mm
Rotación de la articulación de la base: 300 grados
Repetibilidad: +/- 0,02 mm
Motores principales: AC Servo, lazo cerrado

Velocidad (máx.): 2,1 m/s
Gripper: Neumático dedos paralelos
Peso del brazo robot: 17 kg.
Controlador del Robot
Número de programas: 88
Posiciones por programa: 2 500
Multitarea: Si
Función de paletizado: Si
Modos de Interpolación: PTP y CP
Procesador: 64bit RISC y DSP
Programación: Teach Box / PC
Número de señales digitales I/O: 16/16
Comunicación: RS232 / Ethernet / digital punto a punto
Suministro de energía eléctrica: 207 - 253 V AC, 1 / N / PE
Rango de consumo de potencia: 3,5 kVA / 0,9 kVA
Licencia de software para control, procesamiento, y evaluación que incluye:
• Evaluación de las dimensiones del objeto
• Programación por sistema de enseñanza
• Calibración del sistema
• Ajuste de la reacción del sistema
• Configuración del sistema para grabar y llamar programas del sistema
• Modulo de control para el sistema de fuente de iluminación.
• Interfase de comunicación PC vía entradas/salidas.
Software de diseño, programación y simulación del sistema SIMAC
Controlador de la celda de trabajo CELL/LINE CIROS CONTROL (1 Licencia) incluye. PC
Sistema ERP de planeación de la producción
Sistema de planeación de la producción con las siguientes características técnicas:
El sistema de planeación de producción deberá estar ligado con todos los elementos que
componen el sistema de manufactura flexible, la comunicación se realiza de manera
directa por medio de una red de comunicación de datos industrial (Ethernet) con el sistema
de control de la producción lo que permite tener acceso de manera directa con todos los
procesos productivos y elementos del sistema. La arquitectura es de un sistema industrial
bajo el concepto ERP (Enterprise Resource Planning).
El sistema incorpora las siguientes características técnicas:
Sistema ERP (Enterprise Resource Planning), sistema APS (Advanced planning
scheduling), sistema MES (Manufacturing execution systems), sistemas de control de
calidad y sistema de manejo de almacenes.
El sistema deber cumplir con los siguientes objetivos de operación general:
Sistema basado en ambiente Windows bajo la estructura cliente servidor, con una solución
EPR para todo el conjunto del sistema de manufactura.
Sistema para estimación de costos y acotamiento de tiempos para producción: El cual se
puede generar un nuevo sistema, generar ordenes de trabajo, generar estimaciones de
acuerdo a especificaciones especiales del cliente, así como la estimación de costos

utilizando materiales, mano de obra y servicios externos. Por otra parte se puede
determinar el tiempo real de entrega basado en materiales y disponibilidad de recursos.
Entrada de órdenes de trabajo: Sistema de entrada de órdenes de trabajo el cual permitirá
ingresar nuevas órdenes, realizar seguimiento a las mismas en cualquier instante del
proceso así como modificaciones y aplicaciones de cada una de las ordenes generadas.
Lo anterior permite información general sobre el cliente tal como estado del crédito del
cliente, resumen de ordenes de trabajo, disponibilidad de recursos, puesta de en marcha
de equipo, estado del sistema, así como información de embarques.
Sistema de programación de eventos: El sistema de programación de eventos permitirá
manejar de una manera eficiente los recursos y materiales para una operación óptima del
sistema.
Ventana de manufactura: La ventana de manufactura es la ventana principal del sistema
como sistema maestro en los parámetros de ingeniería así como herramienta de manejo
de la producción. Esta ventana principal informara acerca de los elementos que se
requieren para la producción como sistema “último minuto” así como los requerimientos
generales del mismo.
Obtención de costos: El sistema permite la obtención de costos de los diferentes sistemas
productivos de una manera eficiente para poder desarrollar un sistema competitivo.
Sistema de interacción de procesos: Se debe estar seguro que la relación entre el sistema
de ingeniería y el proceso de manufactura es precisa, sincronizada y accesible. Lo anterior
permite un acceso de datos sin duplicación de información, ejecuta búsquedas simples y
complejas así como mantiene la información siempre de un modo preciso y confiable para
el sistema.
Sistema de control de materiales: El sistema debe controlar los diferentes materiales de los
almacenes bajo el sistema MRP (Material requirement planning), lo anterior es para llevar
un estricto control de la entrada, salida y movimientos de materiales en el sistema
productivo. Este sistema también se conoce como maestro de materiales.
Software del sistema de control de la producción SCADA con estación de trabajo.
Administración de órdenes:
Pueden transferirse órdenes de trabajo y datos de planeación pueden ser transferidos al
COSIMIR® control. Un sistema apropiado de procesamiento de las diferentes unidades y
estaciones del sistema iCIM se crea de forma automática y coordina los procesos tal y
como fue especificado en el COSIMIR®
Control. Información de estado de las diferentes estaciones o el proceso global puede ser
solicitada automáticamente.
Integración:
El control de los sistemas ICIM exigirá integrar las varias unidades de automatización en
un solo sistema de control. Control de la producción:
El sistema permitirá una clara estructura y un control efectivo incluso para los sistema de
producción extremadamente complejos.
Durante la configuración, los dispositivos de automatización reales se crean como los

componentes en software de control y se conectan por medio de diferentes drivers en
donde se realiza la comunicación. Los pasos de producción individual se configuran como
tareas del proceso que pueden llevarse a cabo por los componentes.
Programación
Los procesos de la producción reales son asignados y transferidos en diferentes planes
para efectos de programación. Un plan de proceso, para la fabricación de un producto, por
ejemplo, utiliza las diferentes estaciones y componentes para completar las tareas. Todos
los otros procesos son ejecutados al mismo tiempo - como la dirección de trabajos
procesos en un protocolo de comunicación especial - también se pueden crear de forma
separada y en procesos en paralelo. El poderoso sistema multitarea y el sistema
completamente orientado a eventos da como resultado el funcionamiento en un sistema
sumamente poderoso que logra una totalmente nueva calidad de programación y control
de la producción
Control de flujo de materiales:
El sistema de transporte en los sistemas ICIM es realizado por un modulo de control de
materiales integrado en software de control. Este modulo puede iniciarse fácilmente solo
con la ayuda de un asistente de configuración.
La interfaz del usuario:
Deberá tener tiene una interfaz del usuario innovadora, amigable con las últimas normas
de Windows.
Se crean los planes de proceso en el editor tipo tabular integrado. La programación se
simplifica por un diálogo de la herramienta que despliega todos los procesos y tareas y
puede insertar éstos automáticamente en el plan del proceso. Durante la prueba, el
operador tiene como soporte un sistema de seguimiento tal como rastro, puntos de cambio
y modo del solo-paso.
El sistema se deberá instalar en una Estación de trabajo con las siguientes características
mínimas:
• Sistema operativo Windows XP.
• Procesador Pentium IV a 2.2 GHz o superior.
• Disco duro de 20 GB.
• Memoria RAM de 512 Mb.
• Monitor LCD (mínimo 21”).
• Tecnología "plug and play".
• Transferencia de datos por OPC, DDE, ACTIVE X.
• Características de run time para cada estación de trabajo.
• Número de puntos a manejar 128.
• Interfase OPC.
• Tipo de transferencia de datos: OPC, DDE, ACTIVE X.
Software de diseño y simulación de celdas de manufactura flexible (4 Licencias)
Software de control (4 Licencias)
Que contendrá:
El editor de layout
Seleccione las estaciones en la librería del sistema iCIM para construir proceso específico
La fabrica virtual
Utilice la fábrica virtual como una planta real. Usted tiene un navegador para diferentes
vistas y caminos dentro de la planta.
Todas las estaciones virtuales están representadas 1:1 con respecto a las estacione
reales. No solo la representación 3 D, pero también la ejecución de los programas y las
estaciones simuladas son “reales”, lo cual es para nada comparable con sistemas virtuales
animados.
Software de diseño y simulación de robots industriales.
Se suministra el Software de programación, diseño y simulación de Robots industriales en
sus diferentes versiones como se indica a continuación.
• Software de diseño y simulación de robots industriales, versión educacional (20
Licencias de Usuario en red).
• Software control de proceso de diseño y simulación de robots industriales, versión
Industrial (2 licencias de usuario).
– Simulación 3D
– Modelado 3D
– Programación de robots
Software de programación de robots
Es un entorno de aprendizaje virtual para robótica que ofrece una amplia tutoría online
sobre robótica y muchas células rediseñadas con robots. Proporcionara el entorno de
programación de robots y simulaciones 3D.
– Asistente de programación con verificación sintáctica y generación automática de
trayectorias
Simulación en tiempo real
Simulación de procesos y sensores
Simulación de cadenas de arrastre
Detección de colisiones
Multitarea
Librería conteniendo células de robots en funcionamiento
– Las células de trabajo abarcan todo el espectro de aplicaciones compatibles con la
industria: desde simples tareas de manipulación, todas las estaciones robot, sistemas de
pintura y soldadura, hasta una línea de producción completa con robot.
– Con amplia documentación online en todas las células de trabajo con objetivos
didácticos, descripciones funcionales e información de programación.
Información condensada sobre robótica
El Asistente de Robótica ofrece una tutoría amplia e integrada sobre robótica, desde los
fundamentos de la tecnología de manipulación hasta el uso de robots en viajes espaciales.
La presentación contiene numerosos gráficos y animaciones para explicar términos
técnicos y material relacionado, así como vídeos sobre muchas aplicaciones de robots
industriales.
Requerimientos del sistema
– PC con Win 98/NT/2000/XP
– Por lo menos un Pentium II 800 MHz
– 256 MB RAM
– 700 MB de espacio en el disco duro
– Tarjeta gráfica con soporte Open-GL, 32 MB RAM
– Unidad de CD-ROM
Software de Programación para controladores lógicos programables
Software de programación ( con 12 Licencias)
MPI Adapter (3 piezas)

Adaptador de programación para convertir el puerto serial de la PC en la interfase de
programación MPI
Software de diseño y simulación para máquinas CNC CAD / CAM
Software CAD / CAM
Diseño e implementación de dispositivos mecatrónicos.
SISTEMAS INTELIGENTES DE MANUFACTURA ASITIDOS POR COMPUTADORA
(SIMAC)
Estaciones de trabajo del sistema SIMAC.
Consta las siguientes estaciones de trabajo con las características técnicas que se
indican a continuación.
Sistema de transferencia de Pallets
Descripción general:
BANDA TRANSPORTADORA Todos estos componentes se conectan con el PLC principal
vía ASI.
Características Técnicas
Especificaciones
Construcción: Perfil de Aluminio

Tipo: Doble banda de tracción
Número de segmentos: 6
Estaciones: 6
Elementos en cada compuerta:
Sensor de identificación de transportador / actuador de paro / sensor inductivo / válvula
electroneumática
Dimensiones: 1 x 6 m
Altura máxima del transportador: 788 mm
Dimensiones del transportador: 100 x 200 mm
Dimensión del Pallet: 160 x 160 mm
Numero de actuadores para las bandas: 4
Tipo de las bandas: Motores AC asíncronos con Engranes tipo gusano
Velocidad del sistema de transporte: 5 m/min
Máxima carga: 10 kg por transportador
Número de transportadores incluidos: 8
Alimentación eléctrica: 400 VCA
Gabinete de control: Metal, cerrado, IP20, interruptor principal, ENC / APA
Control: PLC SIEMENS S7
Identificación de Pallets: inductivo, código de memoria
Fieldbus: Profibus DP, y ASI
Comunicación con el control principal: ETHERNET TCP/IP
Características:
• Flujo contínuo de piezas de trabajo por medio de transportadores. Las piezas se

mantienen firmes durante el proceso de transporte.
• El sistema es flexible es decir se modifica de una forma simple, la arquitectura de
la banda deberá ser de fácil ajuste y sin usar herramientas, así también se pueden agregar
tramos y/o modificar la posición de las estaciones de paro del sistema.
• La tracción de los contenedores es por medio de fricción de bandas
• Es un sistema de transporte de lazo cerrado el cual opera por medio de 6
motores eléctricos trifásicos de CA, esto con la finalidad de poder realizar diferentes
configuraciones de los elementos del sistema para procesos independientes. tiene en su
recorrido 4 estaciones de paro y detección de contenedor en el sistema. Permite un
seguimiento de cada uno de los procesos que se ejecutan en tiempo real de máximo 100
milisegundos de retardo, así como del elemento que se procesa sobre el transportador
respectivo.
• En las estaciones de paro se alojan los diferentes procesos y elementos que se
necesitan para operar el sistema SIMAC, procesos tales como: ensamble, entrada y salida
de material, etc. Este acomodo se realiza a elección de los usuarios.
• Cada una de las 4 estaciones neumáticas de paro y detecciones, se pueden
colocar libremente sobre la banda de transporte de acuerdo a las necesidades de los
usuarios.
• La tracción se realiza por medio de motores de CA regulando su velocidad con
variadores de frecuencia, para controlar la velocidad y se utiliza un motor por cada tramo
lineal del sistema de transporte, existen 6 motores en el sistema.
• La velocidad de la banda se modifica por medio de variadores de velocidad
(Variadores de frecuencia) lo que permite ir de 0 a 100 % de la velocidad del sistema.
• Se utiliza una identificación de contenedores a través de un lector de cadena de

caracteres analógicos con lo que el sistema tiene una identificación única para cada
elemento.
• Se tiene además un panel de control con elementos luminosos de cada uno de
los diferentes puntos del sistema, en un gabinete en donde se encuentre alojado el control
lógico programable lo que permite tener un sistema de señalización de operación continua,
paso a paso y en caso que se presente una falla en el sistema. Adicionalmente se tiene
dispositivos de paro de emergencia para proteger al usuario del mismo.
• El monitoreo del sistema se realiza desde el control central (por medio de una PC
incluida) por medio de una interface gráfica, en donde se pueda observar el estado de
cada uno de los elementos que participan en el sistema, lo anterior permite el seguimiento
en línea y en tiempo real, máximo de 100 milisegundos de retardo, del mismo modo la
interface proporciona la información necesaria para corregir fallas menores hasta la
interacción del usuario si se requiere. El sistema maneja diferentes niveles de acceso,
desde monitoreo hasta cambio total de parámetros de ejecución, lo anterior deberá
realizarse por medio de un código de acceso.
El monitoreo, control y comunicación del sistema de transporte se realiza por medio de un
Controlador lógico programable con comunicación ETHERNET TCP /IP con las siguientes
características.
Tarjeta CPU con procesador de redundancia y procesamiento multitarea.
• Memoria principal de 64 Kbyte
• 21 K de memoria RAM para drivers e instrucciones de programa integrada
• 192 bloques de funciones.
• 192 llamadas de función.
• 255 bloques de datos.
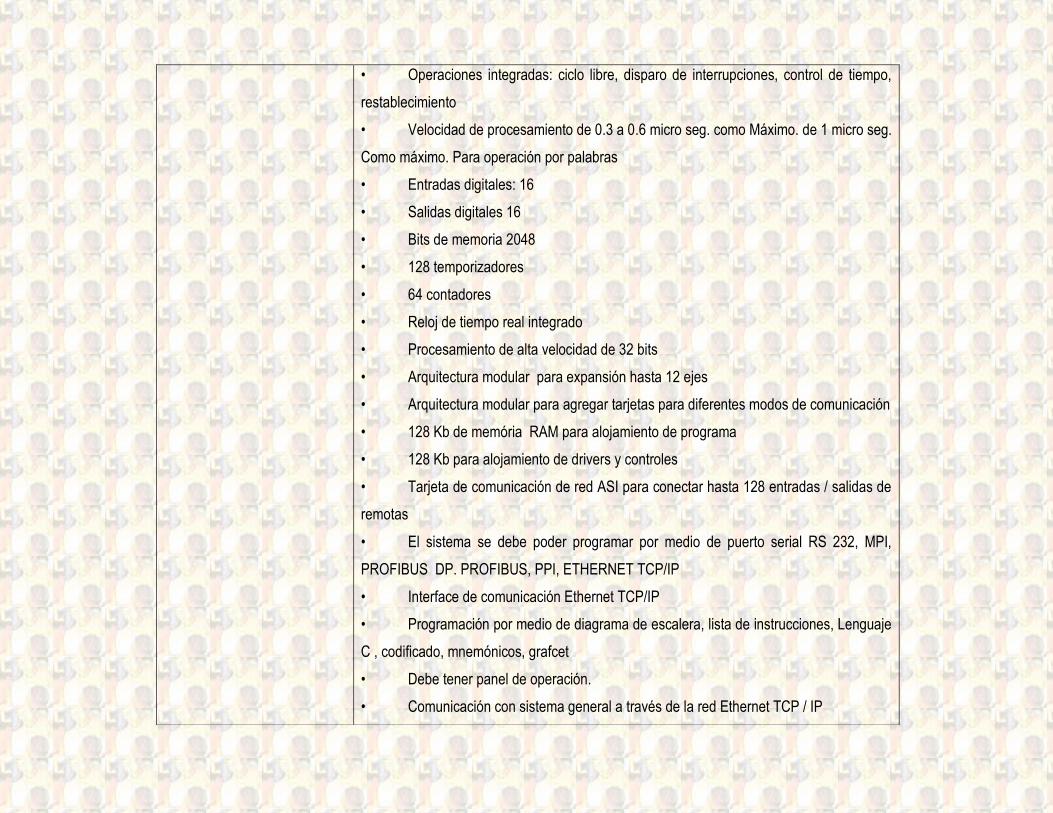
• Operaciones integradas: ciclo libre, disparo de interrupciones, control de tiempo,
restablecimiento
• Velocidad de procesamiento de 0.3 a 0.6 micro seg. como Máximo. de 1 micro seg.
Como máximo. Para operación por palabras
• Entradas digitales: 16
• Salidas digitales 16
• Bits de memoria 2048
• 128 temporizadores
• 64 contadores
• Reloj de tiempo real integrado
• Procesamiento de alta velocidad de 32 bits
• Arquitectura modular para expansión hasta 12 ejes
• Arquitectura modular para agregar tarjetas para diferentes modos de comunicación
• 128 Kb de memória RAM para alojamiento de programa
• 128 Kb para alojamiento de drivers y controles
• Tarjeta de comunicación de red ASI para conectar hasta 128 entradas / salidas de
remotas
• El sistema se debe poder programar por medio de puerto serial RS 232, MPI,
PROFIBUS DP. PROFIBUS, PPI, ETHERNET TCP/IP
• Interface de comunicación Ethernet TCP/IP
• Programación por medio de diagrama de escalera, lista de instrucciones, Lenguaje
C , codificado, mnemónicos, grafcet
• Debe tener panel de operación.
• Comunicación con sistema general a través de la red Ethernet TCP / IP
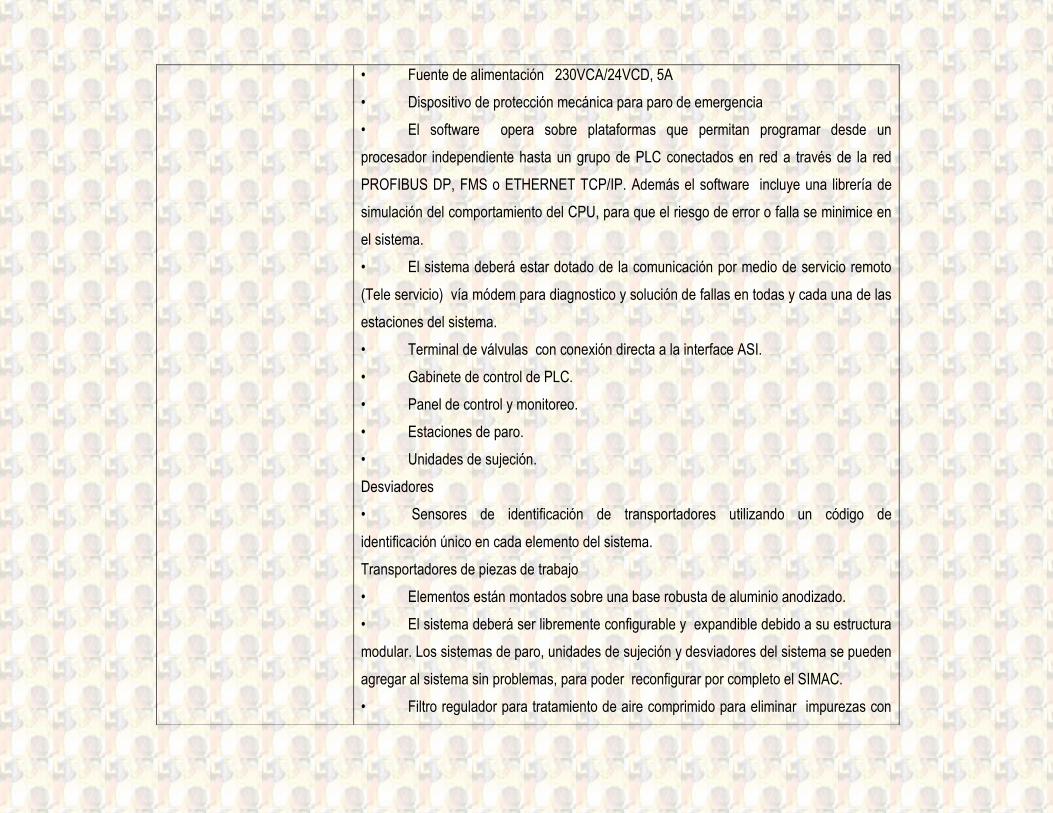
• Fuente de alimentación 230VCA/24VCD, 5A
• Dispositivo de protección mecánica para paro de emergencia
• El software opera sobre plataformas que permitan programar desde un
procesador independiente hasta un grupo de PLC conectados en red a través de la red
PROFIBUS DP, FMS o ETHERNET TCP/IP. Además el software incluye una librería de
simulación del comportamiento del CPU, para que el riesgo de error o falla se minimice en
el sistema.
• El sistema deberá estar dotado de la comunicación por medio de servicio remoto
(Tele servicio) vía módem para diagnostico y solución de fallas en todas y cada una de las
estaciones del sistema.
• Terminal de válvulas con conexión directa a la interface ASI.
• Gabinete de control de PLC.
• Panel de control y monitoreo.
• Estaciones de paro.
• Unidades de sujeción.
Desviadores
• Sensores de identificación de transportadores utilizando un código de
identificación único en cada elemento del sistema.
Transportadores de piezas de trabajo
• Elementos están montados sobre una base robusta de aluminio anodizado.
• El sistema deberá ser libremente configurable y expandible debido a su estructura
modular. Los sistemas de paro, unidades de sujeción y desviadores del sistema se pueden
agregar al sistema sin problemas, para poder reconfigurar por completo el SIMAC.
• Filtro regulador para tratamiento de aire comprimido para eliminar impurezas con
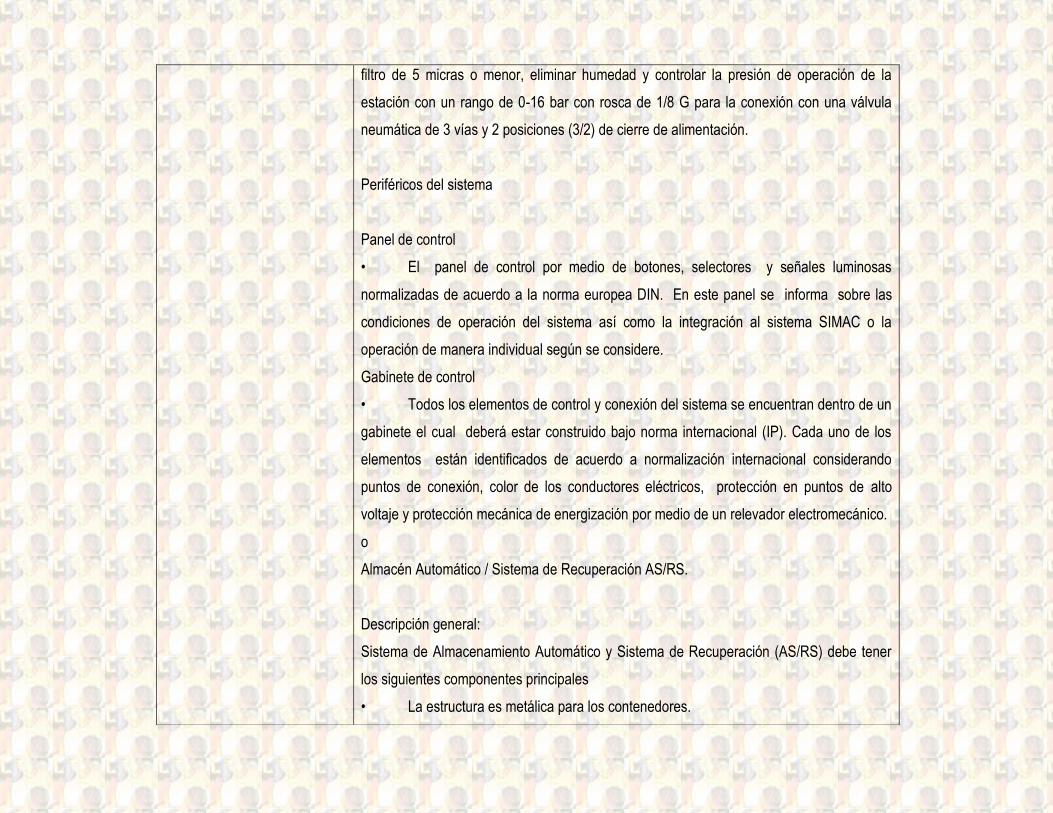
filtro de 5 micras o menor, eliminar humedad y controlar la presión de operación de la
estación con un rango de 0-16 bar con rosca de 1/8 G para la conexión con una válvula
neumática de 3 vías y 2 posiciones (3/2) de cierre de alimentación.
Periféricos del sistema
Panel de control
• El panel de control por medio de botones, selectores y señales luminosas
normalizadas de acuerdo a la norma europea DIN. En este panel se informa sobre las
condiciones de operación del sistema así como la integración al sistema SIMAC o la
operación de manera individual según se considere.
Gabinete de control
• Todos los elementos de control y conexión del sistema se encuentran dentro de un
gabinete el cual deberá estar construido bajo norma internacional (IP). Cada uno de los
elementos están identificados de acuerdo a normalización internacional considerando
puntos de conexión, color de los conductores eléctricos, protección en puntos de alto
voltaje y protección mecánica de energización por medio de un relevador electromecánico.
o
Almacén Automático / Sistema de Recuperación AS/RS.
Descripción general:
Sistema de Almacenamiento Automático y Sistema de Recuperación (AS/RS) debe tener
los siguientes componentes principales
• La estructura es metálica para los contenedores.

• El robot tipo cartesiano con su controlador.
Ambos, la estructura y el robot cartesiano son de uso industrial, de alta precisión y un bajo
mantenimiento. Los pallets se mueven por medio de un gripper telescópico especial con el
movimiento hacia el contenedor y hacia el sistema de transporte. Los tres ejes del robot
son sistemas de control de lazo cerrado, por medio de encoders increméntales en cada
uno de los ejes. Las posiciones del sistema AS/RS se pueden grabar fácilmente por medio
de un teach pendant y posteriormente se pueden enviar a la memoria del PLC. La
comunicación con el control del sistema SIMAC se realiza por medio de Ethernet TCP/IP.
Características técnicas mínimas del sistema
El Sistema automático de control de materiales se alimenta por medio de un sistema de
robot de coordenadas cartesianas, se controla y administra todos los materiales que
participan dentro de los procesos del SIMAC y se cumple con las siguientes características
mínimas.
• Matriz de 8 columnas por 5 filas de forma rectangular con 40 posiciones físicas de
almacenamiento, más 6 posiciones operativas del sistema. El control de posicionamiento y
administración de las posiciones del almacén cartesiano se realizan por medio de un
control lógico programable El sistema físico del almacén cartesiano se puede
administrar y controlar desde un sistema de base de datos bajo plataforma operativa SQL,
la cual deberá estar instalada en una computadora personal incluida. El enlace entre la PC
y el sistema se realizan por medio de una red de datos industriales Ethernet TCP / IP la
cual es una red estandarizada, homologada y abierta para expansiones futuras.
• La base de datos deberá administrar las posiciones del almacén por medio de
códigos de número de parte de cada producto que se ingresa al almacén. Estos números
se seleccionan libremente por el usuario. Todas las posiciones del almacén son

monitoreadas en línea y tiempo real (máximo 100 milisegundos de retardo) realizando una
correlación entre lo que se tiene ingresado en la base de datos y lo que se encuentra
físicamente en el almacén con lo que el “sistema adquiere un grado de inteligencia” que
evitará se ejecuten procesos que queden incompletos así como la ejecución de procesos
con partes o productos erróneos.
• Para verificar la presencia de piezas en cada una de las posiciones del almacén, el
sistema deberá utiliza sensores ópticos de reflexión directa el cual determina si existe
pieza en la posición deseada, lo anterior debe concordar con la base de datos del almacén
lo que genera un grado de inteligencia superior del mismo.
Especificaciones técnicas
• Numero de celdas de Alm. : 40
• Sistema de palletes : contenedores 164 x 164 mm
• Carga nominal de material : 3 Kg.
• Carga máxima : 10 Kg.
• Método de sujeción : telescópico, bidireccional
• Motor eje X : servomotor, 24 VCD
• Encoder eje X :500 Incr./ A/B/I
• Z-axis motor :servomotor, 24 VDC
• Encoder eje Z :500 Incr./ A/B/I
• Motor Telescopio : servomotor, 24 VCD
• Encoder Telescopio : 500 Incr./ A/B/I
• Seguridad Telescopio :embrague limitador de torque
• Drives eje X/Z- :Servomotores de banda dentada

• Repetibilidad : +/- 0.04 mm
• Desplazamiento Horizontal : 1800 mm
• Desplazamiento Vertical :1500 mm
• Dimensiones (LxAxAl) : 2180 x 680 x 1720 mm
Descripción de periféricos
• Un Teach pendant (caja de enseñanza para bahías del almacén) para control de 4
ejes.
• Un controlador para 12 ejes.
• 3 servomotores de CD.
• 3 sistemas de transmisión tipo planetario.
• Sistema de transmisión por rodamientos para los ejes cartesianos.
• El sistema se programa fuera de línea o en línea.
• El sistema opera de modo automático o manual.
• El sistema opera de manera independiente o integrada al sistema SIMAC con 4
paros de emergencia distribuidos a lo largo del almacén para seguridad del usuario.
• Detección de bahías por medio de sensores ópticos de reflexión directa.
• El monitoreo, control y comunicación del almacén se realiza por medio de un PLC
con comunicación PROFIBUS DP y ETHERNET Deberá poder integrarse a una red de
PLC.
Características del controlador del almacén
El sistema de control de lazo cerrado de comunicación del almacén logístico, incluye:
• Procesador de alta velocidad de 64 bits.

• Capacidad para monitorear hasta 10 ejes.
• Arquitectura abierta para expansión.
• Algoritmos de programación PID.
• La memoria flash del sistema es de de 2 Mb y 512 Kb de remanentes.
• 6 Mb de memoria RAM para ejecución de lenguajes de programación.
• Capacidad de instalación de 8 puertos seriales de RS 232 con velocidad de 115.2
Kb.
• Con sistema de batería de respaldo SRAM.
• Recepción de señales de encoders.
• Datos de sistema con memoria propia para realizar lazos de control de potencia
del sistema.
El control lógico programable del sistema AS/RS deberá incluir.
• Tarjeta CPU S7-300 con procesador de redundancia y procesamiento multitarea.
• Memoria principal de 64 Kbyte.
• 21 K de memoria RAM para drivers e instrucciones de programa integrada.
• 192 bloques de funciones.
• 192 llamadas de función.
• 255 bloques de datos.
• Operaciones integradas: ciclo libre, disparo de interrupciones, control de tiempo,
restablecimiento.
• Velocidad de procesamiento de 0.3 a 0.6 micro seg. como Máximo. Para bits y de
1 micro seg. Como máximo. Para operación por palabras.
• Entradas digitales: 16.
• Salidas digitales 16.
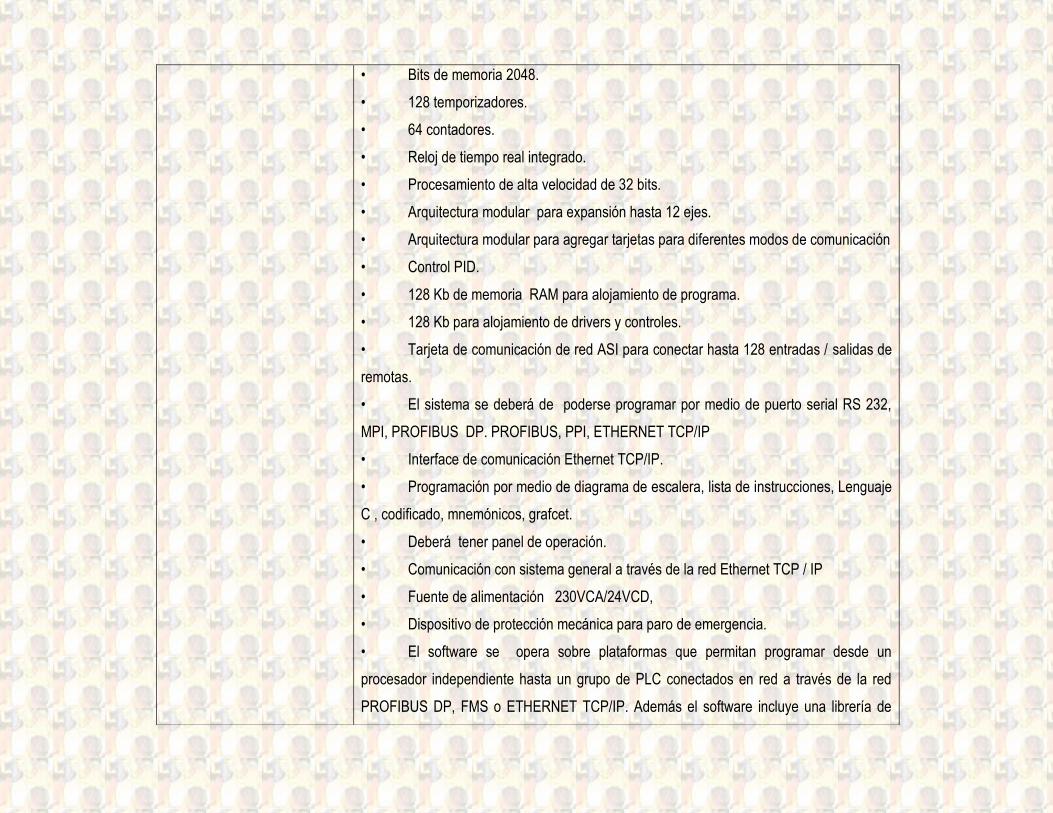
• Bits de memoria 2048.
• 128 temporizadores.
• 64 contadores.
• Reloj de tiempo real integrado.
• Procesamiento de alta velocidad de 32 bits.
• Arquitectura modular para expansión hasta 12 ejes.
• Arquitectura modular para agregar tarjetas para diferentes modos de comunicación
• Control PID.
• 128 Kb de memoria RAM para alojamiento de programa.
• 128 Kb para alojamiento de drivers y controles.
• Tarjeta de comunicación de red ASI para conectar hasta 128 entradas / salidas de
remotas.
• El sistema se deberá de poderse programar por medio de puerto serial RS 232,
MPI, PROFIBUS DP. PROFIBUS, PPI, ETHERNET TCP/IP
• Interface de comunicación Ethernet TCP/IP.
• Programación por medio de diagrama de escalera, lista de instrucciones, Lenguaje
C , codificado, mnemónicos, grafcet.
• Deberá tener panel de operación.
• Comunicación con sistema general a través de la red Ethernet TCP / IP
• Fuente de alimentación 230VCA/24VCD,
• Dispositivo de protección mecánica para paro de emergencia.
• El software se opera sobre plataformas que permitan programar desde un
procesador independiente hasta un grupo de PLC conectados en red a través de la red
PROFIBUS DP, FMS o ETHERNET TCP/IP. Además el software incluye una librería de

simulación del comportamiento del CPU, para que el riesgo de error o falla se minimice.
• El sistema esta dotado de la comunicación por medio de servicio remoto (Tele
servicio) vía módem para diagnostico y solución de fallas en todas y cada una de las
estaciones del sistema.
Panel de operación
• Tiene comunicación con sistema general a través de la red PROFIBUS DP
• Fuente de alimentación 230VCA/24VCD, 5 amp.
• Tiene un dispositivo de protección mecánica para paro de emergencia
Amplificadores de potencia para cada uno de los ejes del sistema
• Cada uno de los ejes del sistema debe de contar con amplificadores de potencia
con algoritmo PID el cual es adicional al algoritmo PID que se tiene en la tarjeta del PLC.
El objetivo de estos amplificadores es generar un óptimo desempeño del sistema, el
amplificador deberá regular los siguientes parámetros:
o Offset del sistema.
o Ganancia proporcional.
o Linealidad de operación.
o Corriente de arranque.
o Corriente máxima.
• El software operara sobre plataformas que permitan programar desde un
procesador independiente hasta un grupo de PLC conectados en red a través de la red
PROFIBUS DP o FMS. Además el software incluirá una librería de simulación del
comportamiento del CPU, para que el riesgo de error o falla se minimice.
• El sistema estará dotado de la comunicación por medio de servicio remoto (Tele
servicio) vía módem para diagnostico y solución de fallas en todas y cada una de las
estaciones del sistema.
Características Adicionales
• El sistema operara de manera independiente o integrada al sistema SIMAC de
acuerdo a las necesidades del usuario. tiene un dispositivo de protección mecánica para
paro de emergencia.
Panel de control
• Panel de control por medio de botones, selectores y señales luminosas
normalizadas de acuerdo a norma internacional ISO y norma europea DIN. En este panel
informa sobre las condiciones de operación del sistema así como la integración al sistema
SIMAC o la operación de manera individual según se considere.
Gabinete de control
• Todos los elementos de control y conexión del sistema se encontraran dentro de
un gabinete el cual está construido bajo norma internacional (IP). Cada uno de los
elementos estos identificados de acuerdo a normalización internacional considerando
puntos de conexión, color de los conductores eléctricos, protección en puntos de alto
voltaje y protección mecánica de energización por medio de un relevador electromecánico.
Documentación técnica
Todos y cada uno de los componentes, elementos sensores actuadores estarán

documentados. Por otra parte cada una de las estaciones deberá contar con su
documentación técnica divida en los siguientes volúmenes:
• Elementos Mecánicos.
• Elementos eléctricos.
• Descripción pieza a pieza.
• Descripción de la estación en conjunto.
• Diagramas eléctricos de todos y cada uno de los circuitos del sistema.
• Colección de ejercicios para operación individual del sistema.
Centro de fresado CNC
El Control:
La máquina es controlada por una computadora personal. En esta computadora se debe
simular los diferentes controles disponibles y reconocidos en la industria por medio del
software de CNC CAD/CAM. Este software corresponde al funcionamiento y operación
del sistema de control real con la posibilidad de cambiar a diferentes controles únicamente
instalando el software adicional y la carátula correspondiente. El operador puede trabajar
con el control original y puede fácilmente familiarizarse con otros sistemas de control tales
como:
• SIEMENS
• GE FANUC
• EMCOTRONIC

Automatización:
Para la integración de los sistemas SIMAC, la maquina CNC esta equipada con todos los
accesorios e interfaces necesarias, tales como: Unidad de sujeción neumática, puerta
automática, interfase robótica y Puerto de comunicación DNC.
Especificaciones técnicas mínimas
1. Área de trabajo:
• En eje X 300-mm
• En eje Y 200-mm
• En eje Z 200 mm,
• Golpe efectivo en Z 100 mm
2. Dimensión de la tabla:
• (L x A) 480x180 mm,
• carga max. 20 Kg., Con 3 ranuras de 12 mm, con 45 mm de distancia entre ellas
3. Motor principal:
• Motor asíncrono de CA. a 440 volts
• Potencia de 2,5 kW al (60%).
• Regulación de velocidad continua.
4. Rango de velocidad
• 0-8000 rpm
5. Alimentador de ejes:
• Motor de 3 fases a pasos,
• Resolución por pasos 1.25 micras
6. Repetitibilidad de posición acc. VDI 3441
• Eje X 0.003,
• Eje Y 0.003,
• Eje Z 0.004
7. Avance Rápido transversal
• 7,5 m/min en eje X-Y y Z
8. Máxima fuerza de alimentación
• 2500 N (en eje X-Y y Z )
9. Sistema de herramienta:
• Torreta tipo tambor con lógica direccional
• Características de sujeción, ISO 30 o similar a norma DIN 2079
• Número de herramientas: 20
10. Sistema de lubricación:
• Guía con lubricación central de aceite
• Lubricación del husillo principal
11. Conexión eléctrica:
• 400 V, 3/N/PE, 50/60 Hz,
• Carga de conexión de la maquina 5 kVA
• Fusibles principales de la máquina 20 A
12. Automatización:
• Dispositivo de sujeción automático.
• Puerta automática
• Interface DNC
• Interface robótica

• Interface para un sistema AVG
13. Control CNC:
• Basado en control por software de PC- el cual emula el control SIEMENS
SINUMERIC 840D y la serie De controladores 21 de FANUC
14. Control de PC:
• CPU core duo 5700
• 4 GB RAM, disco duro de mínimo 20 GB
• 12" TFT pantalla plana
15. Dimensiones:
• 1502 x 1284 x 1875 mm (L x A x Al)
16. Peso:
• Máximo 1000 kg
Centro de Torneado CNC
El Control:
La máquina se controla por una PC convencional. En esta computadora se puede simular
los diferentes controles disponibles y reconocidos en la industria por medio del software de
CNC CAD/CAM. Este software corresponde al funcionamiento y operación del sistema de
control real con la posibilidad de cambiar por diferentes controles únicamente instalando el
software adicional. El operador puede trabajar con el control original y puede fácilmente
familiarizarse con otros sistemas de control tales como:
• SIEMENS
• GE FANUC
• EMCOTRONIC
Automatización
Para la integración de los sistemas SIMAC, la maquina CNC esta equipada con todos los
accesorios e interfaces necesarias, tales como: Unidad de sujeción neumática, puerta
automática, interfase robótica y puerto de comunicación DNC.
Especificaciones técnicas mínimas
1. Área de trabajo:
• Altura entre centros 125 mm,
• Distancia entre centros 405 mm
• Volteo sobre la bancada 250 mm
• Volteo sobre carro para refrentar 85 mm
• Carrera de desplazamiento X/Y 100/300
2. Husillo principal:
• Taladro de plato Ø 20,7 mm
• Diámetro máximo paso de barra Ø 18 mm
3. Motor principal:
• Motor asíncrono trifásico, 2,8 Kw. (al 60%), a 440 volts

• Regulación continua de velocidad
• Rango de velocidad 0-4000 rpm
4. Alimentador de ejes:
• Motor a pasos de 3-fases, resolución de paso. 1.25 micras
• Repetitibilidad de posición según VDI 3441, eje X 0,003, eje Z 0,004
• Avance rápido 7,5 m/min. (en eje X-y Z )
• Alimentación en 0-4 m/min. (en eje X-y Z)
• Máxima fuerza de alimentación 2500 N (en eje X- y Z)
5. Sistema de herramientas:
• Torreta programable
• Con características de sujeción , ISO 30 o similar a norma DIN 2079
• Numero de herramientas: 12
6. Sistema de lubricación:
• Lubricación central con aceite.
• Cojinete del husillo principal lubricado con grasa de por vida
7. Conexión eléctrica:
• 400 V, 3/N/PE, 50/60 Hz,
• Carga de conexión de la maquina 5 KVA.
• Fusibles principales de la máquina 20 A
8. Automatización:
• Dispositivo de sujeción automático,
• Puerta automática
• Interface DNC,
• Interface robótica

9. Control CNC:
• Basado en control por software de PC- el cual emula el control SIEMENS
SINUMERIC 840D o la serie de controladores 21 de FANUC u otros.
10. Control de PC:
• CPU Pentium IV, 64 MB RAM
• Disco duro mínimo de 20 GB
• 12" TFT pantalla plana
11. Dimensiones:
• 1628 x 1174 x 1750 mm (L x A x Al)
12. Peso :
Máximo 700 kg.
Sistema de Alimentación con Robot y eje lineal para las máquinas CNC
Descripción general:
El sistema de alimentación con Robot de 6 grados de libertad es un sistema
completamente industrial, de alta precisión y alto desempeño. La alimentación de las
maquinas de CNC torno y fresa, se realiza por medio de un robot industrial de 6 grados
de libertad montado sobre un eje lineal.
El eje lineal fabricado de un marco de base de aluminio rígido, provisto con un eje de
tracción lineal, con rodamientos precargados para obtener un movimiento suave y preciso.
Deberá incluir sistema de almacenamiento temporal así como almacenes locales para
materia prima, se asegura el funcionamiento independiente del ciclo de flujo de material

en la estación para operación independiente y también es posible manejar la estación
completamente integrada al SIMAC.
Especificaciones técnicas mínimas.
La estación de alimentación de las máquinas de CNC deberá incluir:
• Robot de 6 grados de libertad
• Eje lineal
• Control del sistema
Robot Industrial alimentador de maquinas de CNC de 6 grados de libertad con las
siguientes características:
Construcción : brazo articulado vertical
Numero de ejes: seis (6)( articulación tipo revolución)
Gripper : eléctrico
Carga máxima : 2 kg incluyendo el gripper
Repetibilidad : +/- 0.04 mm
Velocidad resultante : 3500 mm/seg (máxima)
Método de control y accionamiento:
Eléctricos AC con variadores de frecuencia,
E encoders absolutos para cada articulación
Fuerza de sujeción : Máxima de 34.3N, ajustable
Tipo de protección : IP 54
Algoritmo de control : PID Transmisión armónica
Unidad de control del robot
Interfaces : Ethernet TCP / IP,: paralelo (Centronics): serial (RS 232C)
Entradas / Salidas: 16 entradas/16 salidas expandibles a 60/48
Programación: Por teach pendant (caja de enseñanza) con display LCD de 4 líneas a vía
PC
Numero de programas : Hasta 128
Capacidad de memoria :
Alrededor de 5000 pasos por programa (grabación de posiciones.)
Funciones principales :
Interpolación de articulaciones, interpolación lineal 3 dimensiones, interpolación circular,
paletizado, control por interrupciones condicionales, saltos, subrutinas.
El sistema podrá operar de modo multitarea con capacidad de operación de todos los
programas (64) de modo simultáneo.
Eje lineal de alimentación de maquinas CNC:
El eje lineal movido por medio de un motor eléctrico, con transmisión de potencia por
medio de un moto-reductor de banda dentada, con operación por sistema servo con alta
precisión, con las siguientes características:
• El eje lineal es un sistema de banda dentada para transmisión, servomotor de CD
con encoder incremental para detección de posición
• Longitud: 1600 mm
• Precisión: +/- 0.5 mm
• Repetibilidad: +/- 0.04mm
Las posiciones asignadas del eje lineal se asignaran por medio de un teach pendalt que
opera desde el panel central con un permiso por medio de llave. Lo anterior se realiza en
línea o fuera de línea y permite la enseñanza de por lo menos 15 posiciones de manera
directa las cuales son libremente configurables y el registro de cada una de las posiciones
se realiza por medio de una interface gráfica con las lámparas del juego de botones del
panel central.
Unidad de control del sistema de alimentación del robot y del eje lineal
• Tarjeta CPU S7-300 con procesador de redundancia y procesamiento multitarea.
• Memoria principal de 64 Kbyte
• 21 Kb. de memoria RAM para drivers e instrucciones de programa integrado
• 192 bloques de funciones,
• 192 llamadas de función,
• 255 bloques de datos
• Operaciones integradas: ciclo libre, disparo de interrupciones, control de tiempo,
restablecimiento, velocidad de procesamiento de 0.3 a 0.6 micro seg. o menor, para bits y
de 1 micro seg. o menor. para operación por palabras.
• Entradas digitales: 24
• Salidas digitales 24
• Bits de memoria 2048
• Temporizadores: 128
• Contadores: 64
• Reloj de tiempo real integrado
• Procesamiento de alta velocidad de 32 bits

• Arquitectura modular para expansión hasta 12 ejes
• Arquitectura modular para agregar tarjetas para diferentes modos de
comunicación.
• control PID
• 128 Kb de memoria RAM para alojamiento de programa
• 128 Kb para alojamiento de drivers y controles
• Tarjeta de comunicación de red ASI para conectar hasta128 entradas / salidas
remotas.
• El sistema se deberá de programar por medio del puerto serial RS 232, MPI,
PROFIBUS DP. PROFIBUS PPI, interface de comunicación PROFIBUS FMS, ETHERNET
• Programación por medio de diagrama de escalera, lista de instrucciones, Lenguaje
C codificado, mnemónicos y grafcet.
• Panel de operación
• Comunicación con sistema general a través de la red PROFIBUS DP y
ETHERNET
• Fuente de alimentación 230VCA/24VCD, 5A
• Dispositivo de protección mecánica para paro de emergencia
• Cada uno de los ejes del sistema cuenta con amplificadores de potencia con
algoritmo PID, el cual es adicional al algoritmo PID que se tiene en la tarjeta del PLC. El
objetivo de los amplificadores es un optimo desempeño del sistema, el amplificador regula
los siguientes parámetros:
o Offset del sistema,
o Ganancia proporcional
o Linealidad de operación
o Corriente de arranque
o Corriente máxima
• El software operara sobre plataformas que permitan programar desde un
procesador independiente hasta un grupo de PLC conectados en red a través de la red
PROFIBUS DP o ETHERNET. Además el software deberá incluir una librería de simulación
del comportamiento del CPU, para minimizar el riesgo de error o falla.
• El sistema estará dotado de la comunicación por medio de servicio remoto (Tele
servicio) vía módem para diagnostico y solución de fallas en todas y cada una de las
estaciones del sistema.
Características Adicionales
El sistema opera de manera independiente o integrada al sistema SIMAC de acuerdo a las
necesidades de los usuarios, y deberá tener un dispositivo de protección mecánica para
paro de emergencia.
Gabinete de control
Todos los elementos de control y conexión del sistema se instalaran dentro de un
gabinete construido bajo normas internacionales (IP) cada uno de los elementos estará
identificado de acuerdo a normas internacionales considerando puntos de conexión, color
de los conductores eléctricos, protección en puntos de alto voltaje y protección mecánica
de encendido por medio de un relevador electromecánico.
Documentación técnica
Todos y cada uno de los componentes, elementos Sensores y Actuadores estarán

documentados en el sistema general. Por otra parte cada una de las estaciones cuenta
con su documentación técnica divida en los siguientes volúmenes:
• Elementos Mecánicos
• Elementos eléctricos
• Descripción pieza a pieza
• Descripción de la estación en conjunto
• Diagramas eléctricos de todos y cada uno de los circuitos del sistema
• Conjunto de ejercicios para la operación individual del sistema
Estación de ensamble con robot
Descripción general:
La estación de ensamble con robot tendrá un robot industrial, de alta precisión de 5
grados de libertad, montado en una estación de trabajo típica para las tareas de
ensamble. Realizando ensambles de diferentes sistemas, en combinación con un
sistemas de visión, esto para cubrir todos los niveles de complejidad.
Para los proyectos especiales de los estudiantes, en la estación existirá espacio adicional
suficiente para que la celda pueda ser estructurada para manejar otras piezas de trabajo,
siempre y cuando estén dentro del espacio de trabajo del robot.
La célula de ensamble con el robot estará integrado como parte del sistema SIMAC y
también puede ser utilizada de forma individual.
Especificaciones técnicas de la estación de ensamble con robot
Estación de trabajo

Construcción:
Perfiles de aluminio, placas perfiladas de aluminio, puertas con cerradura para apertura y
cierre
Eléctrica:
Sistema de relevador para paro de emergencia
Interface de conexión (Distribución I/O y señalización)
Panel de Operación:
START/STOP/RESET/STATUS/EMERGENCY STOP
Dimensiones mínimas.
L/A/Al = 1100/700/788 mm
Almacenes Temporales:
3 para las piezas en proceso
Sujeción del dispositivo de ensamble:
Unidad de sujeción neumática X/Y
Número de estaciones de buffer para pallets: 4
Interface con el robot:
SysLink (digital I/O)
Interface neumática:
Bloque de válvulas , 3 Válvulas que apliquen al sistema.
Unidad de mantenimiento neumática
Sensores: 4 sensores inductivos
2 sensores de presión neumática
4 sensores de fin de carrera para actuador tipo magnético
Alimentación eléctrica: 230 VCA / 50-60Hz / 2 Amp.

Suministro de aire comprimido: 6 - 8 bar / 20 l/min
Brazo de robot
Tipo: Vertical articulado
Grados de libertad : 5
Carga máxima: 2 kg
Alcance del robot, al punto del gripper: 410 mm
Rotación de la articulación de la base: 300 grados
Repetibilidad: +/- 0,02 mm
Motores principales: AC Servo, lazo cerrado
Velocidad (máx.): 2,1 m/s
Gripper: Neumático dedos paralelos
Peso del brazo robot: 17 kg.
Controlador del Robot
Número de programas: 88
Posiciones por programa: 2 500
Multitarea: Si
Función de paletizado: Si
Modos de Interpolación: PTP y CP
Procesador: 64bit RISC y DSP
Programación: Teach Box / PC
Número de señales digitales I/O: 16/16
Comunicación: RS232 / Ethernet / digital punto a punto
Suministro de energía eléctrica: 207 - 253 V AC, 1 / N / PE
Rango de consumo de potencia: 3,5 kVA / 0,9 kVA
Sistema de visión para control de calidad con robot
El sistema realizara múltiples funciones tales como: un ensamble completo y preciso,
encontrando posiciones y orientaciones de las diferentes piezas a ensamblar, realizar
mediciones, etc. La cámara es una unidad compacta e inteligente, con un procesador de
imágenes incluido e interface Ethernet. Debido al alto desempeño y la velocidad de la
interfase, la cámara se puede comunicar al controlador del robot y también a una PC.
La cámara combina la última tecnología CMOS para imágenes junto con el software para
procesamiento, juntos forman una poderosa herramienta de inspección.
El sistema es a color.
El sistema ofrecer conectividad Ethernet para realizar diagnósticos remotos, solución de
fallas en cualquier parte, utilizando la red de comunicación Internet TCP/IP.
Incluye software de procesamiento de imágenes.
Especificaciones del sistema de visión mínimas
Sistema de procesamiento de imagines con cámara CCD
• El sistema de control de calidad por sistema de visión realizara un estricto
seguimiento de los diferentes procesos que se ejecutan en el sistema de ensamble flexible,
realiza la inspección a una gran variedad de elementos, realizando programaciones fuera
de línea para cada uno de los procesos operativos.
• El sistema se integrara fácilmente a cualquier sistema de producción, ya sea por
medio de una interfase PTP o por una red de comunicación de PC's
• El algoritmo de control realiza el análisis de cada una de las necesidades de
medición, lo realiza por medio de un procesador digital de señales (DSP) el cual procesa
señales a alta velocidad de cada una de las imágenes adquiridas por el sistema.
• El sistema analiza elementos en 2D con una cámara. y se integra a cualquier
dispositivo de control industrial por medio de entradas y salidas a 24 VCD.
El sistema de procesamiento de imágenes y evaluación de componentes tendrá los
siguientes elementos:
• Unidad de procesamiento de imágenes
• Interfase de comunicación Ethernet TCP / IP
• Sistema de interfase por entradas salidas, 8 entradas, 8 salidas
• Cuatro salidas de video
• Formatos de video: RS 170, CCIR, NTSC.
• Resolución de conversión 16 bits
• Memoria 32 kb expandible
• Cámara a color CCD con objetivo incluido
• Monitor LCD de color de 15"
• Tablero y ratón
• Sistema de protección obscura para toma de imágenes
• Cables y elementos de conexión
• Sistema de iluminación infrarroja.
• Sistema de control electrónico.
• Control de iluminación de acuerdo al cuerpo a medir (se deberá instalar y
desarrollar de acuerdo al tipo de piezas del sistema).
Características técnicas mínimas
Resolución 640 x 480 píxeles
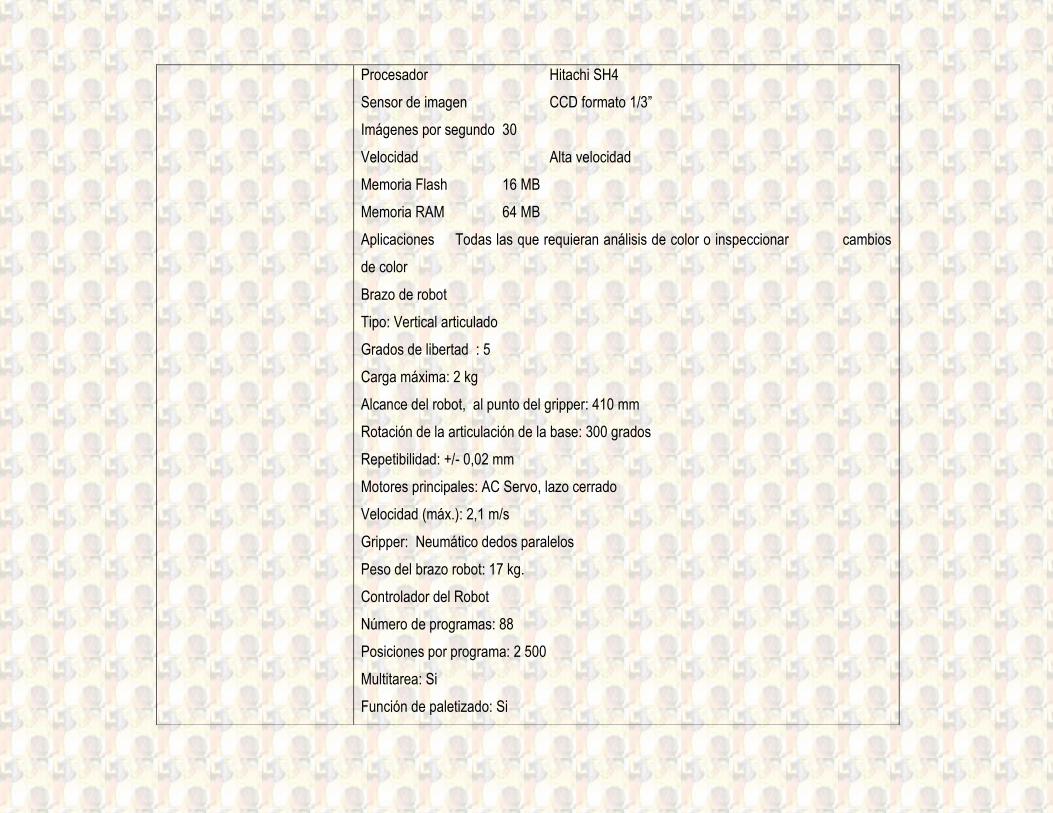
Procesador Hitachi SH4
Sensor de imagen CCD formato 1/3”
Imágenes por segundo 30
Velocidad Alta velocidad
Memoria Flash 16 MB
Memoria RAM 64 MB
Aplicaciones Todas las que requieran análisis de color o inspeccionar cambios
de color
Brazo de robot
Tipo: Vertical articulado
Grados de libertad : 5
Carga máxima: 2 kg
Alcance del robot, al punto del gripper: 410 mm
Rotación de la articulación de la base: 300 grados
Repetibilidad: +/- 0,02 mm
Motores principales: AC Servo, lazo cerrado
Velocidad (máx.): 2,1 m/s
Gripper: Neumático dedos paralelos
Peso del brazo robot: 17 kg.
Controlador del Robot
Número de programas: 88
Posiciones por programa: 2 500
Multitarea: Si
Función de paletizado: Si

Modos de Interpolación: PTP y CP
Procesador: 64bit RISC y DSP
Programación: Teach Box / PC
Número de señales digitales I/O: 16/16
Comunicación: RS232 / Ethernet / digital punto a punto
Suministro de energía eléctrica: 207 - 253 V AC, 1 / N / PE
Rango de consumo de potencia: 3,5 kVA / 0,9 kVA
Licencia de software para control, procesamiento, y evaluación que incluye:
• Evaluación de las dimensiones del objeto
• Programación por sistema de enseñanza
• Calibración del sistema
• Ajuste de la reacción del sistema
• Configuración del sistema para grabar y llamar programas del sistema
• Modulo de control para el sistema de fuente de iluminación.
• Interfase de comunicación PC vía entradas/salidas.
Software de diseño, programación y simulación del sistema SIMAC
Controlador de la celda de trabajo CELL/LINE CIROS CONTROL (1 Licencia) incluye. PC
Sistema ERP de planeación de la producción
Sistema de planeación de la producción con las siguientes características técnicas:
El sistema de planeación de producción deberá estar ligado con todos los elementos que
componen el sistema de manufactura flexible, la comunicación se realiza de manera
directa por medio de una red de comunicación de datos industrial (Ethernet) con el sistema

de control de la producción lo que permite tener acceso de manera directa con todos los
procesos productivos y elementos del sistema. La arquitectura es de un sistema industrial
bajo el concepto ERP (Enterprise Resource Planning).
El sistema incorpora las siguientes características técnicas:
Sistema ERP (Enterprise Resource Planning), sistema APS (Advanced planning
scheduling), sistema MES (Manufacturing execution systems), sistemas de control de
calidad y sistema de manejo de almacenes.
El sistema deber cumplir con los siguientes objetivos de operación general:
Sistema basado en ambiente Windows bajo la estructura cliente servidor, con una solución
EPR para todo el conjunto del sistema de manufactura.
Sistema para estimación de costos y acotamiento de tiempos para producción: El cual se
puede generar un nuevo sistema, generar ordenes de trabajo, generar estimaciones de
acuerdo a especificaciones especiales del cliente, así como la estimación de costos
utilizando materiales, mano de obra y servicios externos. Por otra parte se puede
determinar el tiempo real de entrega basado en materiales y disponibilidad de recursos.
Entrada de órdenes de trabajo: Sistema de entrada de órdenes de trabajo el cual permitirá
ingresar nuevas órdenes, realizar seguimiento a las mismas en cualquier instante del
proceso así como modificaciones y aplicaciones de cada una de las ordenes generadas.
Lo anterior permite información general sobre el cliente tal como estado del crédito del
cliente, resumen de ordenes de trabajo, disponibilidad de recursos, puesta de en marcha
de equipo, estado del sistema, así como información de embarques.
Sistema de programación de eventos: El sistema de programación de eventos permitirá
manejar de una manera eficiente los recursos y materiales para una operación óptima del
sistema.
Ventana de manufactura: La ventana de manufactura es la ventana principal del sistema
como sistema maestro en los parámetros de ingeniería así como herramienta de manejo
de la producción. Esta ventana principal informara acerca de los elementos que se
requieren para la producción como sistema “último minuto” así como los requerimientos
generales del mismo.
Obtención de costos: El sistema permite la obtención de costos de los diferentes sistemas
productivos de una manera eficiente para poder desarrollar un sistema competitivo.
Sistema de interacción de procesos: Se debe estar seguro que la relación entre el sistema
de ingeniería y el proceso de manufactura es precisa, sincronizada y accesible. Lo anterior
permite un acceso de datos sin duplicación de información, ejecuta búsquedas simples y
complejas así como mantiene la información siempre de un modo preciso y confiable para
el sistema.
Sistema de control de materiales: El sistema debe controlar los diferentes materiales de los
almacenes bajo el sistema MRP (Material requirement planning), lo anterior es para llevar
un estricto control de la entrada, salida y movimientos de materiales en el sistema

productivo. Este sistema también se conoce como maestro de materiales.
Software del sistema de control de la producción SCADA con estación de trabajo.
Administración de órdenes:
Pueden transferirse órdenes de trabajo y datos de planeación pueden ser transferidos al
COSIMIR® control. Un sistema apropiado de procesamiento de las diferentes unidades y
estaciones del sistema iCIM se crea de forma automática y coordina los procesos tal y
como fue especificado en el COSIMIR®
Control. Información de estado de las diferentes estaciones o el proceso global puede ser
solicitada automáticamente.
Integración:
El control de los sistemas ICIM exigirá integrar las varias unidades de automatización en
un solo sistema de control. Control de la producción:
El sistema permitirá una clara estructura y un control efectivo incluso para los sistema de
producción extremadamente complejos.
Durante la configuración, los dispositivos de automatización reales se crean como los
componentes en software de control y se conectan por medio de diferentes drivers en
donde se realiza la comunicación. Los pasos de producción individual se configuran como
tareas del proceso que pueden llevarse a cabo por los componentes.
Programación
Los procesos de la producción reales son asignados y transferidos en diferentes planes
para efectos de programación. Un plan de proceso, para la fabricación de un producto, por
ejemplo, utiliza las diferentes estaciones y componentes para completar las tareas. Todos
los otros procesos son ejecutados al mismo tiempo - como la dirección de trabajos

procesos en un protocolo de comunicación especial - también se pueden crear de forma
separada y en procesos en paralelo. El poderoso sistema multitarea y el sistema
completamente orientado a eventos da como resultado el funcionamiento en un sistema
sumamente poderoso que logra una totalmente nueva calidad de programación y control
de la producción
Control de flujo de materiales:
El sistema de transporte en los sistemas ICIM es realizado por un modulo de control de
materiales integrado en software de control. Este modulo puede iniciarse fácilmente solo
con la ayuda de un asistente de configuración.
La interfaz del usuario:
Deberá tener tiene una interfaz del usuario innovadora, amigable con las últimas normas
de Windows.
Se crean los planes de proceso en el editor tipo tabular integrado. La programación se
simplifica por un diálogo de la herramienta que despliega todos los procesos y tareas y
puede insertar éstos automáticamente en el plan del proceso. Durante la prueba, el
operador tiene como soporte un sistema de seguimiento tal como rastro, puntos de cambio
y modo del solo-paso.
El sistema se deberá instalar en una Estación de trabajo con las siguientes características
mínimas:
• Sistema operativo Windows XP.
• Procesador Pentium IV a 2.2 GHz o superior.
• Disco duro de 20 GB.
• Memoria RAM de 512 Mb.
• Monitor LCD (mínimo 21”).

• Tecnología "plug and play".
• Transferencia de datos por OPC, DDE, ACTIVE X.
• Características de run time para cada estación de trabajo.
• Número de puntos a manejar 128.
• Interfase OPC.
• Tipo de transferencia de datos: OPC, DDE, ACTIVE X.
Software de diseño y simulación de celdas de manufactura flexible (4 Licencias)
Software de control (4 Licencias)
Que contendrá:
El editor de layout
Seleccione las estaciones en la librería del sistema iCIM para construir proceso específico
La fabrica virtual
Utilice la fábrica virtual como una planta real. Usted tiene un navegador para diferentes
vistas y caminos dentro de la planta.
Todas las estaciones virtuales están representadas 1:1 con respecto a las estacione
reales. No solo la representación 3 D, pero también la ejecución de los programas y las
estaciones simuladas son “reales”, lo cual es para nada comparable con sistemas virtuales
animados.
Software de diseño y simulación de robots industriales.
Se suministra el Software de programación, diseño y simulación de Robots industriales en
sus diferentes versiones como se indica a continuación.
• Software de diseño y simulación de robots industriales, versión educacional (20
Licencias de Usuario en red).

• Software control de proceso de diseño y simulación de robots industriales, versión
Industrial (2 licencias de usuario).
– Simulación 3D
– Modelado 3D
– Programación de robots
Software de programación de robots
Es un entorno de aprendizaje virtual para robótica que ofrece una amplia tutoría online
sobre robótica y muchas células rediseñadas con robots. Proporcionara el entorno de
programación de robots y simulaciones 3D.
– Asistente de programación con verificación sintáctica y generación automática de
trayectorias
Simulación en tiempo real
Simulación de procesos y sensores
Simulación de cadenas de arrastre
Detección de colisiones
Multitarea
Librería conteniendo células de robots en funcionamiento
– Las células de trabajo abarcan todo el espectro de aplicaciones compatibles con la
industria: desde simples tareas de manipulación, todas las estaciones robot, sistemas de
pintura y soldadura, hasta una línea de producción completa con robot.
– Con amplia documentación online en todas las células de trabajo con objetivos
didácticos, descripciones funcionales e información de programación.

Información condensada sobre robótica
El Asistente de Robótica ofrece una tutoría amplia e integrada sobre robótica, desde los
fundamentos de la tecnología de manipulación hasta el uso de robots en viajes espaciales.
La presentación contiene numerosos gráficos y animaciones para explicar términos
técnicos y material relacionado, así como vídeos sobre muchas aplicaciones de robots
industriales.
Requerimientos del sistema
– PC con Win 98/NT/2000/XP
– Por lo menos un Pentium II 800 MHz
– 256 MB RAM
– 700 MB de espacio en el disco duro
– Tarjeta gráfica con soporte Open-GL, 32 MB RAM
– Unidad de CD-ROM
Software de Programación para controladores lógicos programables
Software de programación ( con 12 Licencias)
MPI Adapter (3 piezas)
Adaptador de programación para convertir el puerto serial de la PC en la interfase de
programación MPI
Software de diseño y simulación para máquinas CNC CAD / CAM
Software CAD / CAM

MÓDULO I
Ovreseas Vocational Training Association Control digital de circuitos eléctricos, SEP SEIT
K&H MFG CO.,LTD. Entrenador de electrónica industrial Manual de experimentos, htpp.www.kandh.tw
K&H MFG CO.,LTD. Laboratorio de electrónica digital , htpp.www.kandh.tw
Boylestad Robert & Nashelsky Louis, Electrónica Teoría de Circuitos y Dispositivos Electrónicos, Pearson.
Boylestad Robert, Teoria de Circuitos y Dispositivos Electrónicos (8°/ Ed).Prentice Hall.
Boylestad Robert, Fundamentos de Electrónica (4°/ Ed),Pearson.
Boylestad, Introducción al Análisis de Circuitos, (10°/Ed).Prentice Hall.
Cooper, Kenneth & Helfrick Albert, Instrumentación Electrónica Moderna y Técnicas de Medición, Pearson.
Dawes ,Chester, Tratado de Electricidad 1,Corriente alterna,(14° Ed),Gustavo Gili
Dawes ,Chester, Tratado de Electricidad 1,Corriente continua, (13° Ed).Gustavo Gili
Floyd Thomas, Fundamentos de Electrónica Digital,Limusa
Maloney Timothy, Electrónica Industrial Moderna, (3°/Ed.), Pearson.
Rashid, Muhammad, Electrónica de Potencia, Circuitos, Dispositivos y Aplicaciones, Prentice Hall. (3°/edición),
Wolf Stanley, Guía para Mediciones Electrónicas y Prácticas de Laboratorio Prentice Hall. (2°/ Ed),
Donovan Robert, Electrónica Digital, Cecsa
Dorf Richard, Circuitos Eléctricos, Alfaomega
Wolf,Gerhard, Electrónica Digital, Marcombo
Zbar Paul, Prácticas de Electrónica Industrial, Alfaomega.
Zbar Paul, Prácticas de Electrónica, Alfomega.
FUENTES DE INFORMACIÓN BÁSICA Y COMPLEMENTARIA

Zbar, Paul, Prácticas de Electricidad, Alfaomega.
MÓDULO II
W. Bolton. Mecatrónica sistemas de control electrónico en ingeniería mecánica y eléctrica. segunda edición.
Francesco Balena. (2005). Programación en visual Basic ( España) Mc. Graw Hill.
Lehemann Stefan, Hart Wolfram, Marcombo. Microcontroladores PIC practicas de programación.
Marcombo. Microcontroladores Fundamentos y aplicaciones con PIC.
Angulo Usategui, José María y Angulo Martínez. Microcontroladores PIC Diseño práctico de aplicaciones. McGraw-Hill.
Manuales de circuitos hidráulicos Festo.
Manuales de circuitos neumáticos Festo.
Ismart. Manual de funcionamiento IMO segunda edición.
Logo. versión 4 Manual edición 06/2003. Siemens.
Boylestad Robert & Nashelsky Louis. Electrónica Teoría de Circuitos y Dispositivos Electrónicos. Pearson.
Boylestad Robert, Teoría de Circuitos y Dispositivos Electrónicos (8°/ Ed.). Prentice Hall.
Malvino. Principios de Electrónica, (6°/ Ed.). Mc. Graw Hill.
Zbar Paul. Prácticas de Electrónica Industrial. Alfaomega.
Zbar Paul. Prácticas de Electrónica. Alfaomega.
Zbar, Paul. Prácticas de Electricidad. Alfaomega.
Páginas electrónicas:
Programas, esquemas, cursos, tutoriales y proyectos con microcontroladores. (en línea) disponible en: www.microcontroladorespic.com; internet accesado el 19 de Mayo de 2010.
Microcontroladores PIC | Electrónica Unicrom. (en línea) disponible en: www.unicrom.com/Tut_PICs1.asp; internet accesado el 19 de Mayo de 2010.
MÓDULO III
Lazo Cerna Humberto, Seguridad Industrial, ED. Diana.
Antonio Creus Instrumentación Industrial, Editorial Alfaomega.
W. G. Holzbock, Instrumentos Para medición y control, ED. CECSA.
William D. Cooper - Albert D. Helfrick, Instrumentación Electrónica Moderna y Técnicas de Medición, Editorial Prentice Hall.
Normas Técnicas de Competencia Laboral, CONOCER.
Wildi y De Vito, Experimentos con equipo eléctrico, Editorial LIMUSA.
Mileaf Harry Electricidad Tomo I y II Editorial LIMUSA.
González Muñiz, Ramón Manual básico de prevención de riesgos laborales Editorial Thompson Paraninfo.
R. J. Tocci, Sistemas Digitales, principio y aplicaciones. Edit. Prentice Hall.
R. Boylestad. Teoría de circuitos electrónicos, ED. Trillas.
Morris Mano. Electrónica Digital. ED. Prentice Hall.
Manual del Ingeniero Electrónico, Mc Graw Hill.
Robert F. Coughlin, Amplificadores Operacionales y circuitos integrados lineales. ED. Prentice Hall
Festo Didactic, (1992), Sistema par enseñar automatización y comunicaciones, Hidráulica Nivel Básico. – Manual De Estudio.
Festo Didactic, (1992), Sistema par enseñar automatización y comunicaciones, Neumática Nivel Básico. – Manual De Estudio.
Antonio Gullén Salvador, (1999), Introducción a la Neumática, ED., Alfaomega.
Overseas Vocational Training Association, (1997), Mecatrónica I, II y III manual de instrucción, ED. SEP DGETI.
Fiedler G., (1988), Electroneumática-prácticas avanzadas, Festo Didactic.
Thomson (2000), Paraninfo. Neumática.
Mandano/Acevedo/Pérez, (1992), Controladores lógicos y autómatas programables, ED., Marcombo.
Michel G., (1990), Autómatas programables industriales-arquitectura y aplicaciones, ED., Marcombo
Intelitek, ( 2004 ), Open CIM Offline, Open CIM Intro and Open FMS( Computer Integrated Manufacturing for Industrial Training
Aplications.
MÓDULO IV
W. Bolton. Mecatrónica sistemas de control electrónico en ingeniería mecánica y eléctrica. segunda edición
García Criollo Roberto. (2000). Estudio del trabajo, Ingeniería de métodos. México Mac Graw-Hill Inc.
Bernat Romani. (1999). Jugar con las máquinas. Ed. Ters Torres/Edunsa.
Clive Gifford. (1998). Robots Descubre cómo funcionan estas máquinas Sin Saber.
Murphy, Robin. (2001). Introduction to AI Robotics. MIT Press.
Parametric Technology Corporation. Creating Milling Sequences with Pro/Engineer Wildfire - CAD/CAM/CAEKunwoo.
Lee. (1999). Principles of CAD/CAM/CAE. Editorial Addison-Wesley.
"Ibrahim Zeid. (1991). CAD/CAM Teory and Practice. Ed. Mac Graw-Hill Inc.
M.P. Groover and E.W. Zimmers Jr. (1984). CAD/CAM: Computer-Aided Design and Manufacturing. Ed. Prentice Hall
International Inc.
Julio Blanco Fernández; Félix Sanz Adán; Julio Blanco Fernández; Félix Sanz Adán. CAD-CAM. GRÁFICOS,
ANIMACIÓN Y SIMULACIÓN POR ORDENADOR. Paraninfo.
CONTROLER USB. User manual Intelitek.
SCORBASE VERSION 5.3 AND HIGER. User manual Intelitek.
SCORBOT-ER 4U. User manual Intelitek.
ROBOCELL. Versión 5.0.1. User manual Intelitek.
COMPUTER INTEGRATED MANUFACTURING FOR INDUSTRIAL TRAINING APPLICATIONS. Software Version 4.0. User
Manual.

MÓDULO V
Lazo Cerna Humberto, Seguridad Industrial, ED. Diana.
Antonio Creus Instrumentación Industrial, Editorial Alfaomega.
W. G. Holzbock, Instrumentos Para medición y control, ED. CECSA.
William D. Cooper - Albert D. Helfrick, Instrumentación Electrónica Moderna y Técnicas de Medición, Editorial Prentice Hall.
Normas Técnicas de Competencia Laboral, CONOCER.
Wildi y De Vito, Experimentos con equipo eléctrico, Editorial LIMUSA.
Mileaf Harry Electricidad Tomo I y II Editorial LIMUSA.
González Muñiz, Ramón Manual básico de prevención de riesgos laborales Editorial Thompson Paraninfo.
R. J. Tocci, Sistemas Digitales, principio y aplicaciones. Edit. Prentice Hall.
R. Boylestad. Teoría de circuitos electrónicos, ED. Trillas.
Morris Mano. Electrónica Digital. ED. Prentice Hall.
Manual del Ingeniero Electrónico, Mc Graw Hill.
Robert F. Coughlin, Amplificadores Operacionales y circuitos integrados lineales. ED. Prentice Hall
Festo Didactic, (1992), Sistema par enseñar automatización y comunicaciones, Hidráulica Nivel Básico. – Manual De Estudio.
Festo Didactic, (1992), Sistema par enseñar automatización y comunicaciones, Neumática Nivel Básico. – Manual De Estudio.
Antonio Gullén Salvador, (1999), Introducción a la Neumática, ED., Alfaomega.
Overseas Vocational Training Association, (1997), Mecatrónica I, II y III manual de instrucción, ED. SEP DGETI.
Fiedler G., (1988), Electroneumática-prácticas avanzadas, Festo Didactic.
Thomson (2000), Paraninfo. Neumática.
Mandano/Acevedo/Pérez, (1992), Controladores lógicos y autómatas programables, ED., Marcombo.
Michel G., (1990), Autómatas programables industriales-arquitectura y aplicaciones, ED., Marcombo

Intelitek, ( 2004 ), Open CIM Offline, Open CIM Intro and Open FMS( Computer Integrated Manufacturing for Industrial Training
Aplications.
APLICA PARA CADA UNO DE LOS MÓDULOS ANTERIORES
Para el caso se utiliza el estilo de publicaciones de la APA
Las publicaciones no periódicas son las que se publican por separado: libros, informes, folletos, ciertas monografías,
manuales y medios audiovisuales.
Publicaciones no periódicas:
Bibliografía
Autor, A. A. (Año de publicación). Título del trabajo. Localidad: Editorial.
Ejemplo:
Salgado Alba, Guillen Francisco, Ruiperez Isidoro. (2002) Manual de Geriatría. México. Editorial Masson
Publicación electrónica no periódica:
Autor, A. A., Autor, B. B. & Autor, C. C. (Año de publicación). Título del artículo. Título de la publicación
periódica, xx, xxx-xxx. Recuperado el día, mes y año, de la fuente.
Documento electrónico:
Autor, A. A. (Año de publicación). Título del trabajo. Recuperado el día, mes y año, de la fuente.
Para páginas Web:
Ejemplo 1:
Electronic reference formats recommendes by the American Psychological Association, (2000, 12 de octubre).
Recuperado el 23 de octubre de 2000, de http://www.apa.org/journals/webref.html
Ejemplo 2:
NORMA OFICIAL DE MÉXICO. (En línea) Disponible en http://www.salud.gob.mx; Internet, accesado el 4 de
Junio de 2008.
Imágenes:
Folleto de prevención de accidentes
http://www.municomas.gob.pe/sccs/complementarios/riggu/archivos/ges020004.jpg

LINEAMIENTOS DE LAS GUÍAS DIDÁCTICAS.
ACUERDO 8 DEL COMITÉ DIRECTIVO DEL SNB.
DIDÁCTICA Y EVALUACIÓN DEL COMPONENTE DE FORMACIÓN PROFESIONAL.
PRESENTACIÓN COSDAC “SECUENCIA DIDÁCTICA”
RECOMENDACIONES METODOLÓGICAS PARA ELABORAR PROGRAMAS.
ACUERDO 444 Y 488.
GUÍAS COMPLEMENTARIA PARA EVLUAR PLANTELES.
ACUERDO 10. LAS GUÍAS COMPLEMENTARIAS Y EL ACUERDO 10 SON LOS DOCUMENTOS RECTORES CON BASE
EN LOS CUALES SE ELABORÓ EL FORMATO DE INTEGRACIÓN DE LOS PLANES Y PROGRAMAS DE
LA CARRERA.
DOCUMENTOS ANEXOS