presentación de powerpoint · en los últimos tiempos los (rpas) sistemas de aeronave pilotadas...
TRANSCRIPT

TCO2 T/GEO
AVENDAÑO ALATA DIONISIO
Introducción
Objetivo
Base legal
Procesos
Planeamiento y Ejecución del Vuelo
Procesamiento y Ajuste Fotogramétrico
Restitución Fotogramétrica
Edición Cartográfica
Conclusiones
INDICE
En los últimos tiempos los (RPAS) Sistemas de Aeronave Pilotadas
Remotamente) comúnmente denominados Drones, están generando
muchas posturas desde los diversos sectores, tanto públicos como privados.
Gracias al uso de los procesadores electrónicos, de software especializado
y del sistema de Posicionamiento Global (GPS), las capacidades de control
automático en base a la información procedente de los sensores instalados
en las aeronaves, la rápida reacción correctiva como consecuencia del
procesamiento local de la información del estado de vuelo, hacen posible
que la retroalimentación aporte un inmenso potencial, minimizando para
estos artefactos las posibles desviaciones entre comportamiento y el
esperado.
INTRODUCCION
• Eventos Seguridad Ciudadana
• Situaciones de Emergencia Reforestación
• Búsqueda y Rescate Fumigación
• Vigilancia Fronteriza Trabajos de Ingeniera
• Incendios Forestales Topografía
• Arqueología Envió de Medicinas
• Geología Minería
• Investigaciones Biológicas Cinematografía
• Manipulaciones de Material Nocivo Cartografía
• Actividad Deportiva Medicina Forense
• Agricultura de precisión
APLICACIONES
El objetivo de este trabajo es generar una cartografía con precisiones para una escala 1:1000 a partir de imágenes obtenidos con RPA.
Llevar a cabo la Restitución Fotogramétrica de las imágenes obtenidas con RPA en el entorno LPS.

• Ley N° 27292, Ley del Instituto Geográfico Nacional.
• NTC 001-2015-MTC/12: “Requisitos para las Operaciones de
Sistemas de Aeronaves Pilotadas a Distancia (RPAS).
• Norma Técnica para la producción de Cartografía Básica Escala
1:1000.
BASE LEGAL

ALA FIJA
MULTI ROTOR (HELICE)
HIBRIDOS
TIPOS DE RPA
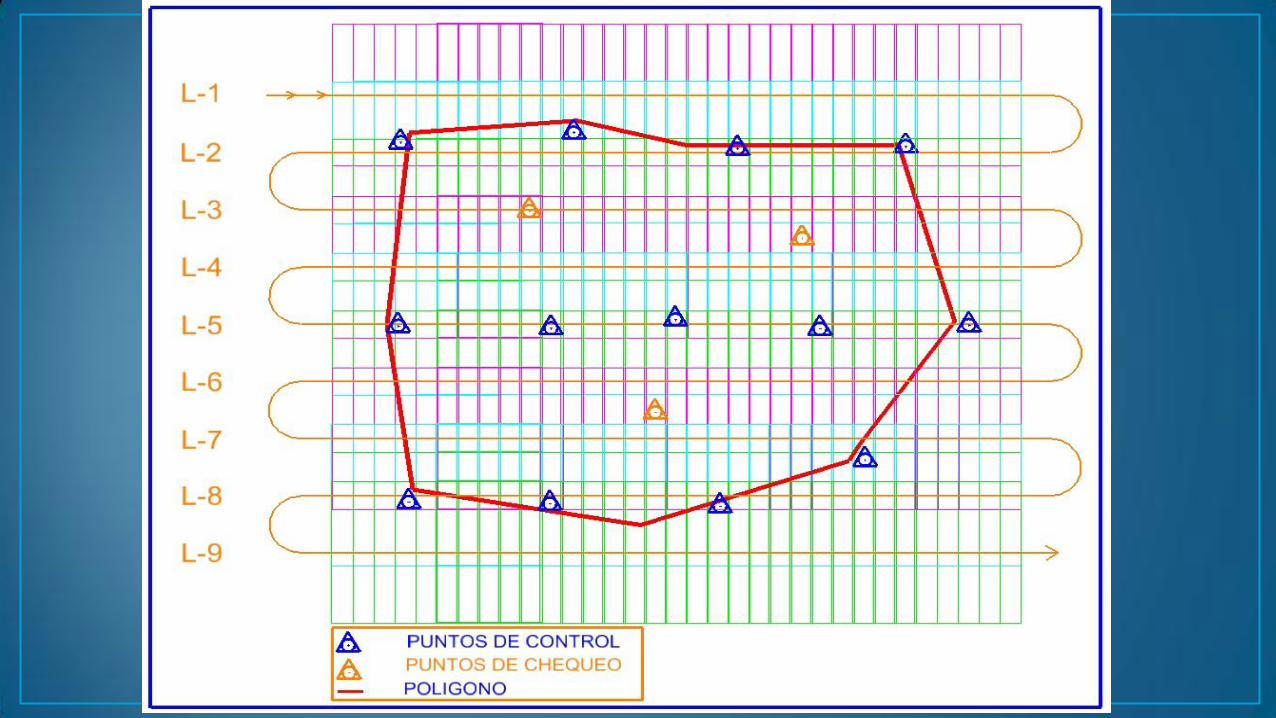
Es una labor que se realiza en gabinete previo al vuelo, un buen planeamiento nos
garantiza obtener las imágenes adecuadas para el tipo de trabajo requerido, los
aspectos mas importantes a ser considerados deben ser los siguientes:
Las condiciones Climáticas y la Geografía
El Recubrimiento del área de interés
La Resolución espacial de las imágenes
Altura de vuelo
Calidad de las imágenes
El Solapamiento longitudinal y Lateral
Trabajo de pre-marcado
Puntos de control y chequeo
PLANEAMIENTO Y EJECUCION DE VUELO
El procesamiento de las imágenes se realiza en gabinete para lo cual se debe disponer
de estaciones de trabajo destinado exclusivamente para ese fin cuyo procesador debe
ser rápido, para ello existen diferentes programas tanto licenciados como gratuitas, cada
uno con sus bondades y sus limitaciones, sin embargo los programas gratuitos nos
limitan en algunas aplicaciones que disponen.
Para garantizar la precisión de nuestro trabajo utilizamos los puntos de control de campo
y chequeo, las precisiones que tienen los RPA son métricos, lo que se quiere son
precisiones centimétricos, para lograr esta precisión requerimos de los GPS
diferenciales o los sistemas de RTK.
PROCESAMIENTO Y AJUSTE
FOTOGRAMETRICO

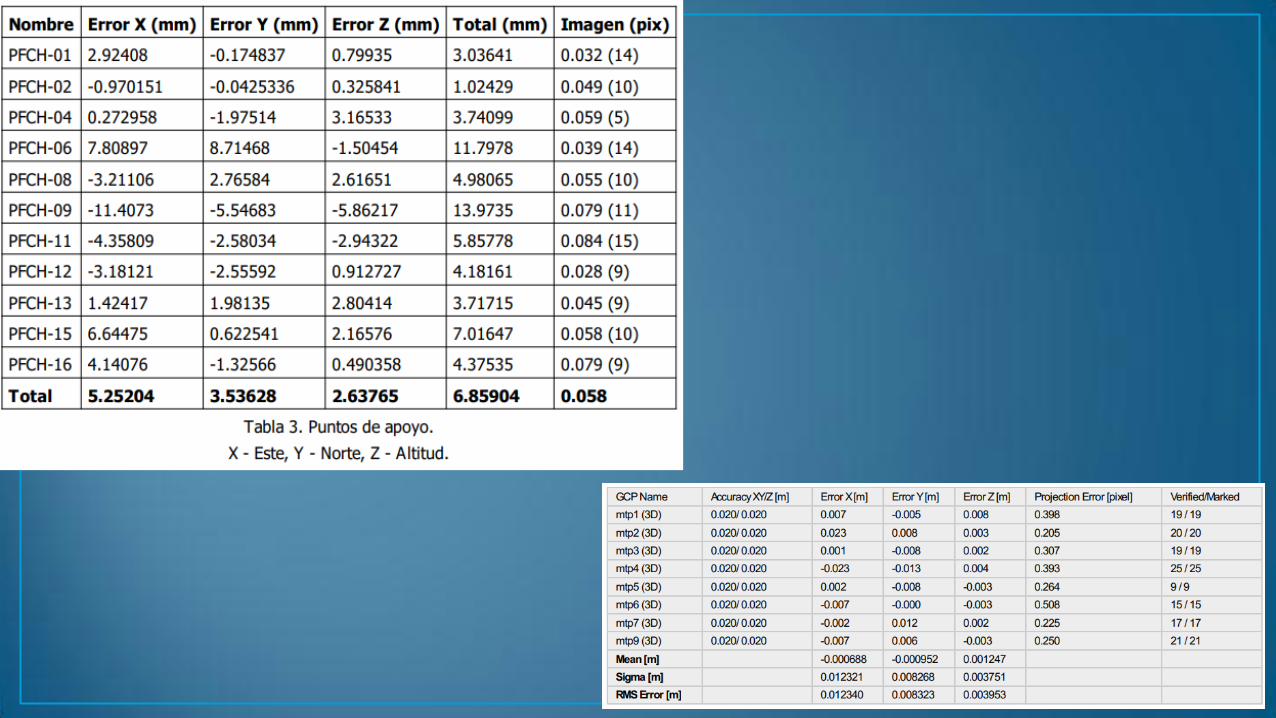
Proceso que cosiste en corroborar la calidad del ajuste fotogramétrico si los valores en posición y altura están dentro del rango permisible para la escala de trabajo, esta labor se debe realizar en las estaciones fotogramétricas haciendo las lecturas en estéreo de los puntos de control y chequeo y establecer las diferencias, esta verificación permitirá garantizarnos nuestro trabajo.
Reporte de ajuste fotogramétrico
Exportar los centros de proyección
Exportar los parámetros de la cámara
Verificación del ajuste fotogramétrico
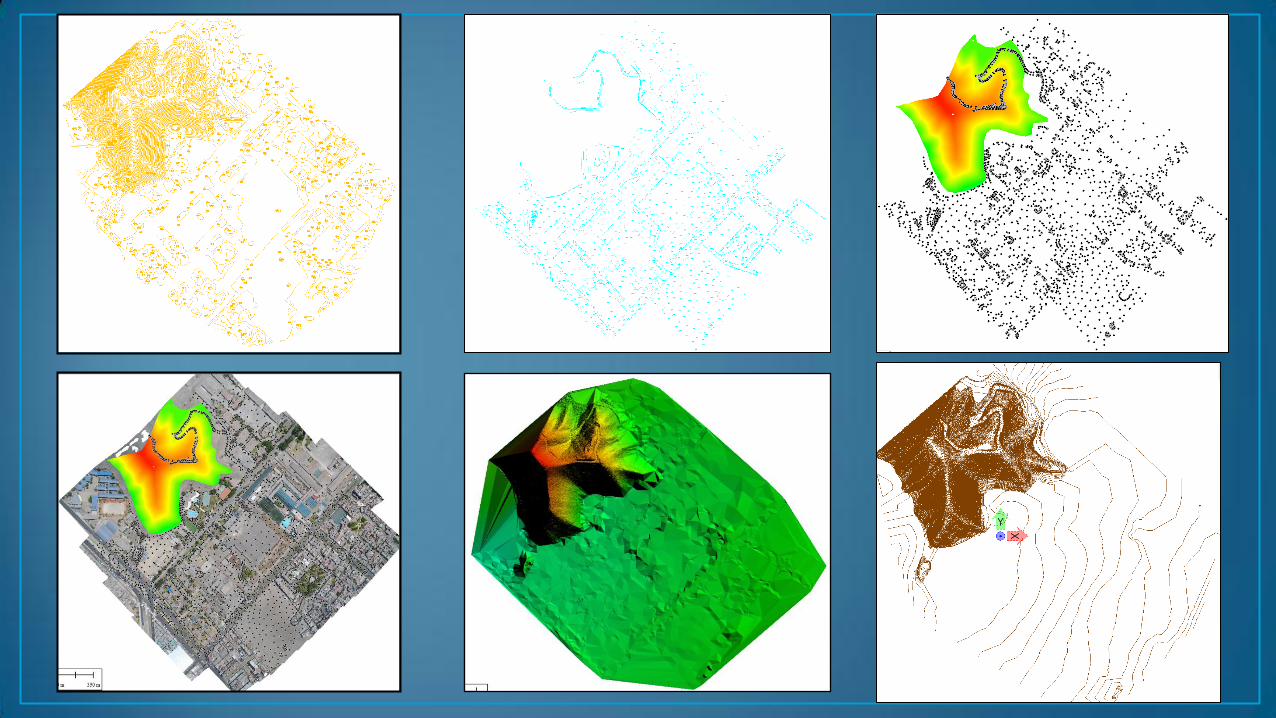
Clasificación y edición de la nube de puntos densa
Generación del Modelo Digital de Elevaciones
Generación de las curvas de nivel automáticas
Generación del Ortofoto
VERIFICACION DEL AJSUTE
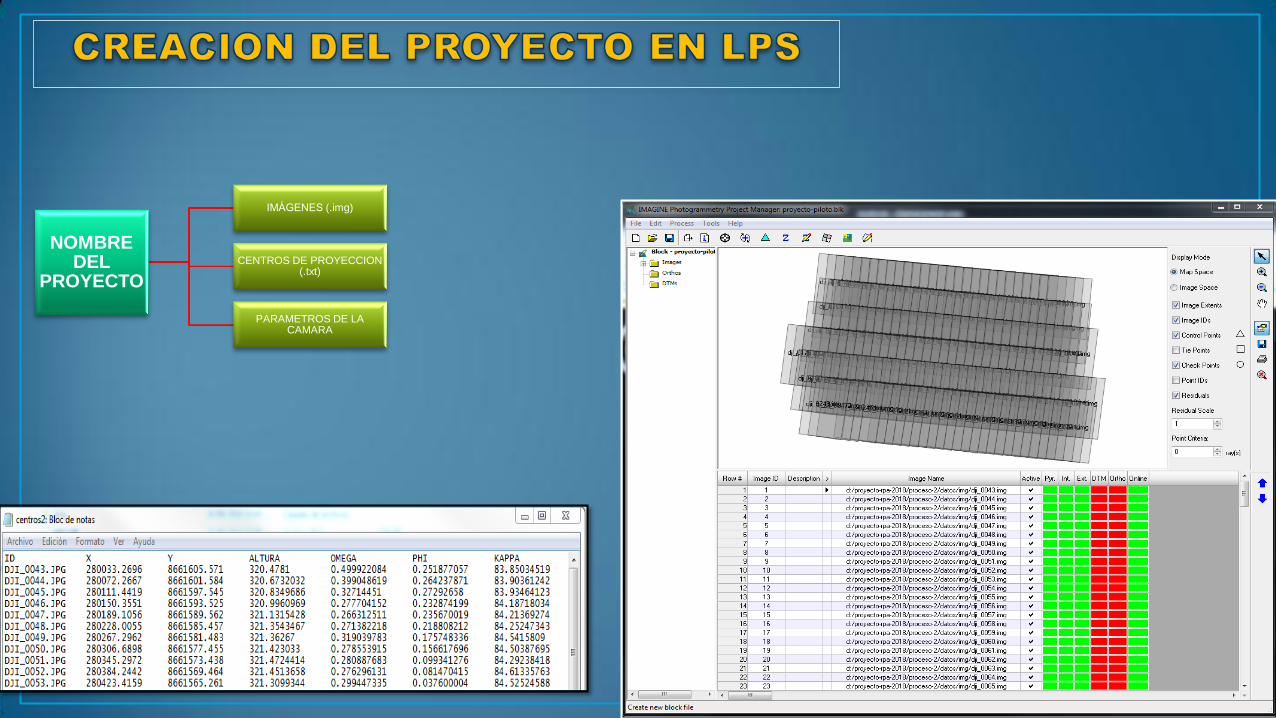
NOMBRE DEL
PROYECTO
IMÁGENES (.img)
CENTROS DE PROYECCION (.txt)
PARAMETROS DE LA CAMARA
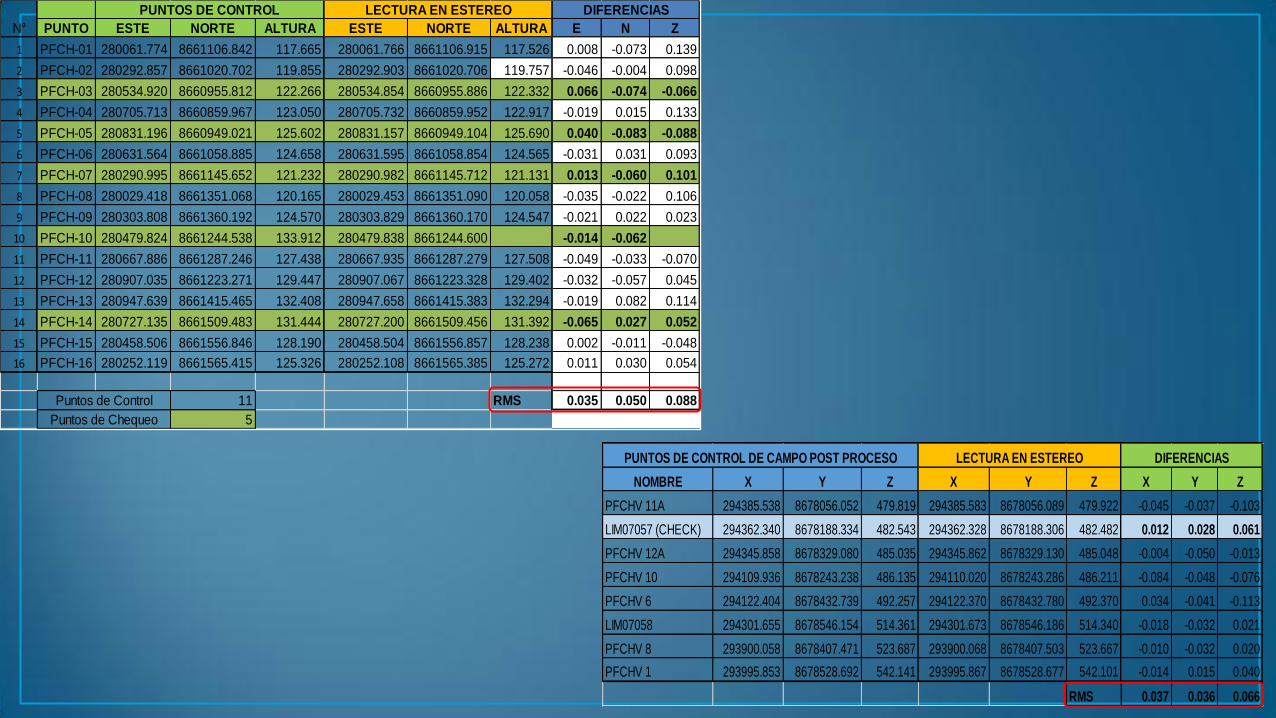
PUNTO ESTE NORTE ALTURA ESTE NORTE ALTURA E N Z
1 PFCH-01 280061.774 8661106.842 117.665 280061.766 8661106.915 117.526 0.008 -0.073 0.139
2 PFCH-02 280292.857 8661020.702 119.855 280292.903 8661020.706 119.757 -0.046 -0.004 0.098
3 PFCH-03 280534.920 8660955.812 122.266 280534.854 8660955.886 122.332 0.066 -0.074 -0.066
4 PFCH-04 280705.713 8660859.967 123.050 280705.732 8660859.952 122.917 -0.019 0.015 0.133
5 PFCH-05 280831.196 8660949.021 125.602 280831.157 8660949.104 125.690 0.040 -0.083 -0.088
6 PFCH-06 280631.564 8661058.885 124.658 280631.595 8661058.854 124.565 -0.031 0.031 0.093
7 PFCH-07 280290.995 8661145.652 121.232 280290.982 8661145.712 121.131 0.013 -0.060 0.101
8 PFCH-08 280029.418 8661351.068 120.165 280029.453 8661351.090 120.058 -0.035 -0.022 0.106
9 PFCH-09 280303.808 8661360.192 124.570 280303.829 8661360.170 124.547 -0.021 0.022 0.023
10 PFCH-10 280479.824 8661244.538 133.912 280479.838 8661244.600 -0.014 -0.062
11 PFCH-11 280667.886 8661287.246 127.438 280667.935 8661287.279 127.508 -0.049 -0.033 -0.070
12 PFCH-12 280907.035 8661223.271 129.447 280907.067 8661223.328 129.402 -0.032 -0.057 0.045
13 PFCH-13 280947.639 8661415.465 132.408 280947.658 8661415.383 132.294 -0.019 0.082 0.114
14 PFCH-14 280727.135 8661509.483 131.444 280727.200 8661509.456 131.392 -0.065 0.027 0.052
15 PFCH-15 280458.506 8661556.846 128.190 280458.504 8661556.857 128.238 0.002 -0.011 -0.048
16 PFCH-16 280252.119 8661565.415 125.326 280252.108 8661565.385 125.272 0.011 0.030 0.054
11 RMS 0.035 0.050 0.088
5
N°
DIFERENCIASPUNTOS DE CONTROL LECTURA EN ESTEREO
Puntos de Control
Puntos de Chequeo
NOMBRE X Y Z X Y Z X Y Z
PFCHV 11A 294385.538 8678056.052 479.819 294385.583 8678056.089 479.922 -0.045 -0.037 -0.103
LIM07057 (CHECK) 294362.340 8678188.334 482.543 294362.328 8678188.306 482.482 0.012 0.028 0.061
PFCHV 12A 294345.858 8678329.080 485.035 294345.862 8678329.130 485.048 -0.004 -0.050 -0.013
PFCHV 10 294109.936 8678243.238 486.135 294110.020 8678243.286 486.211 -0.084 -0.048 -0.076
PFCHV 6 294122.404 8678432.739 492.257 294122.370 8678432.780 492.370 0.034 -0.041 -0.113
LIM07058 294301.655 8678546.154 514.361 294301.673 8678546.186 514.340 -0.018 -0.032 0.021
PFCHV 8 293900.058 8678407.471 523.687 293900.068 8678407.503 523.667 -0.010 -0.032 0.020
PFCHV 1 293995.853 8678528.692 542.141 293995.867 8678528.677 542.101 -0.014 0.015 0.040
RMS 0.037 0.036 0.066
PUNTOS DE CONTROL DE CAMPO POST PROCESO LECTURA EN ESTEREO DIFERENCIAS
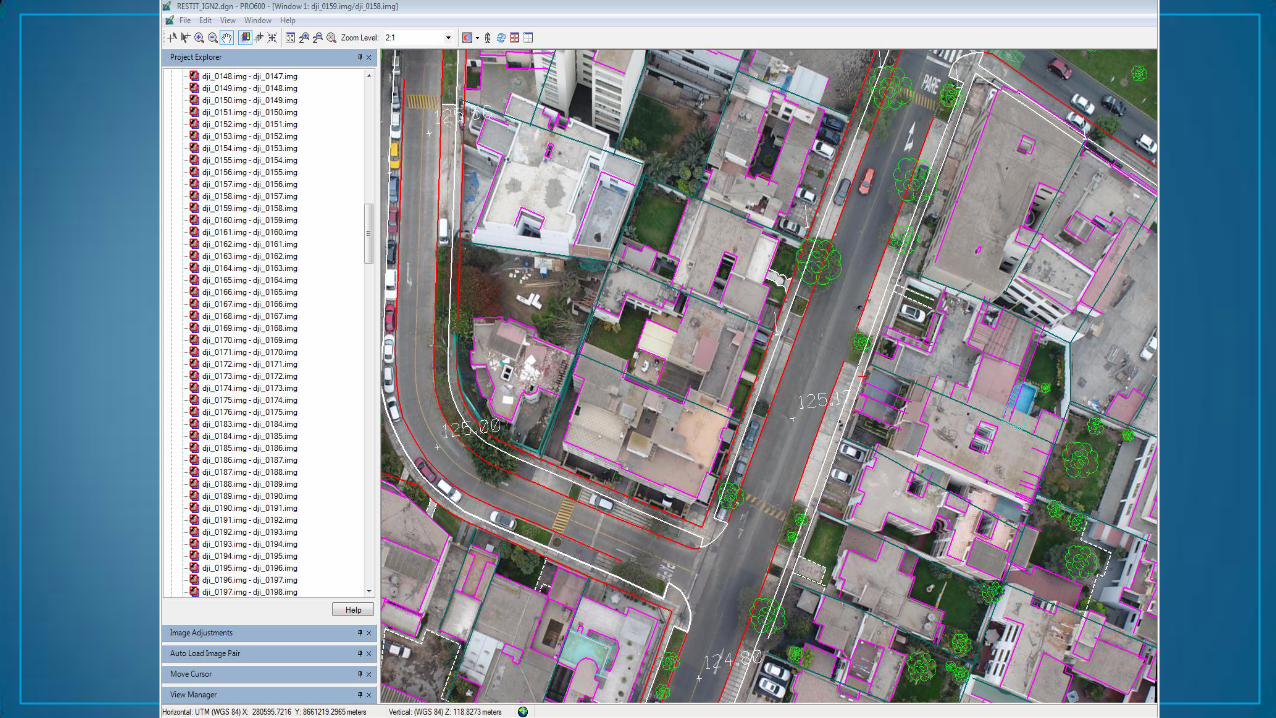
RESTITUCION FOTOGRAMETRICA
La Restitución Fotogramétrica es el procedimiento para generar modelo
3D del terreno a partir de un par estereoscópico con el propósito de
extraer elementos del terreno, para la elaboración de un mapa nuevo o
actualizado.
Para la generación de una cartografía con precisión necesariamente
requerimos levantar la información en 3D, mediante las estaciones
fotogramétricas digitales.
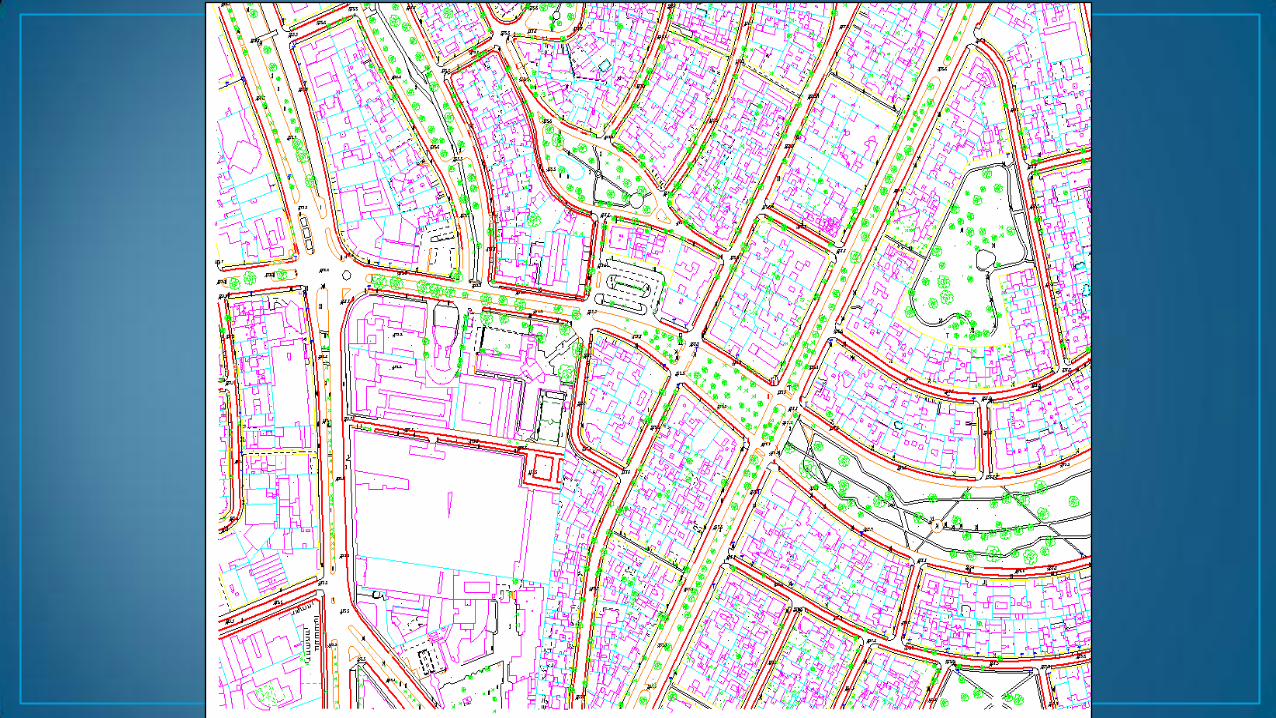
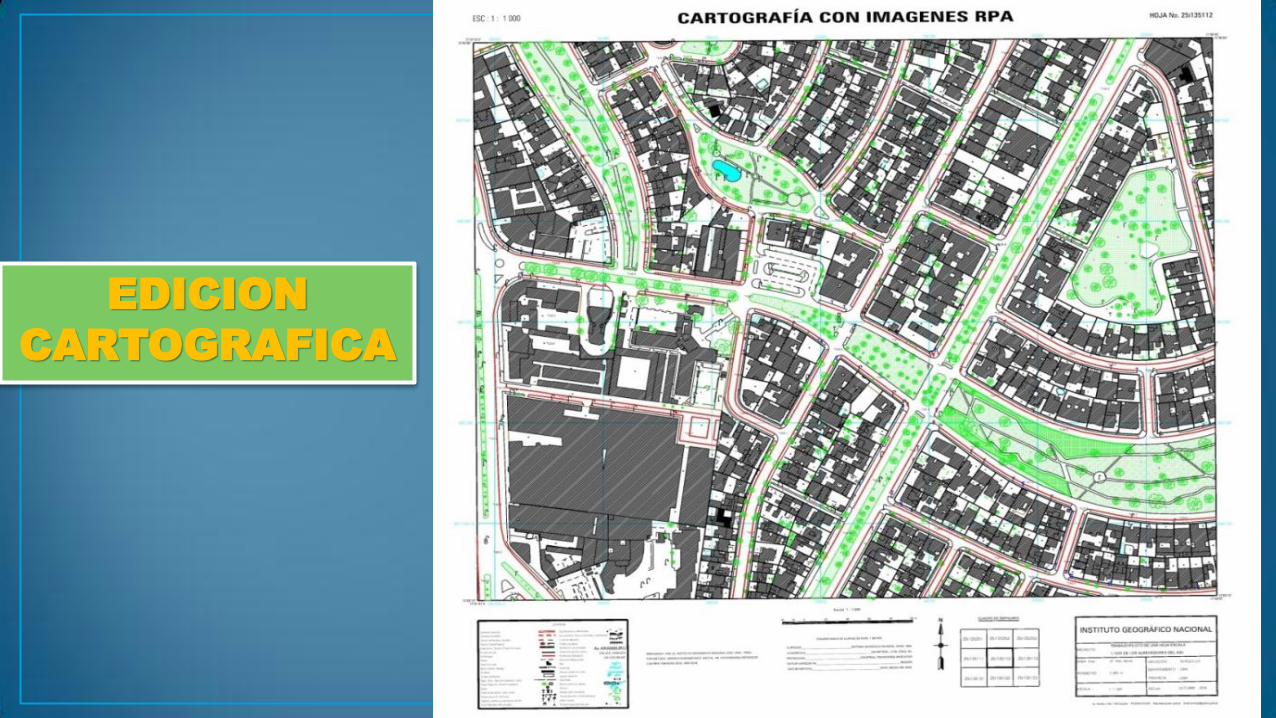
EDICION
CARTOGRAFICA
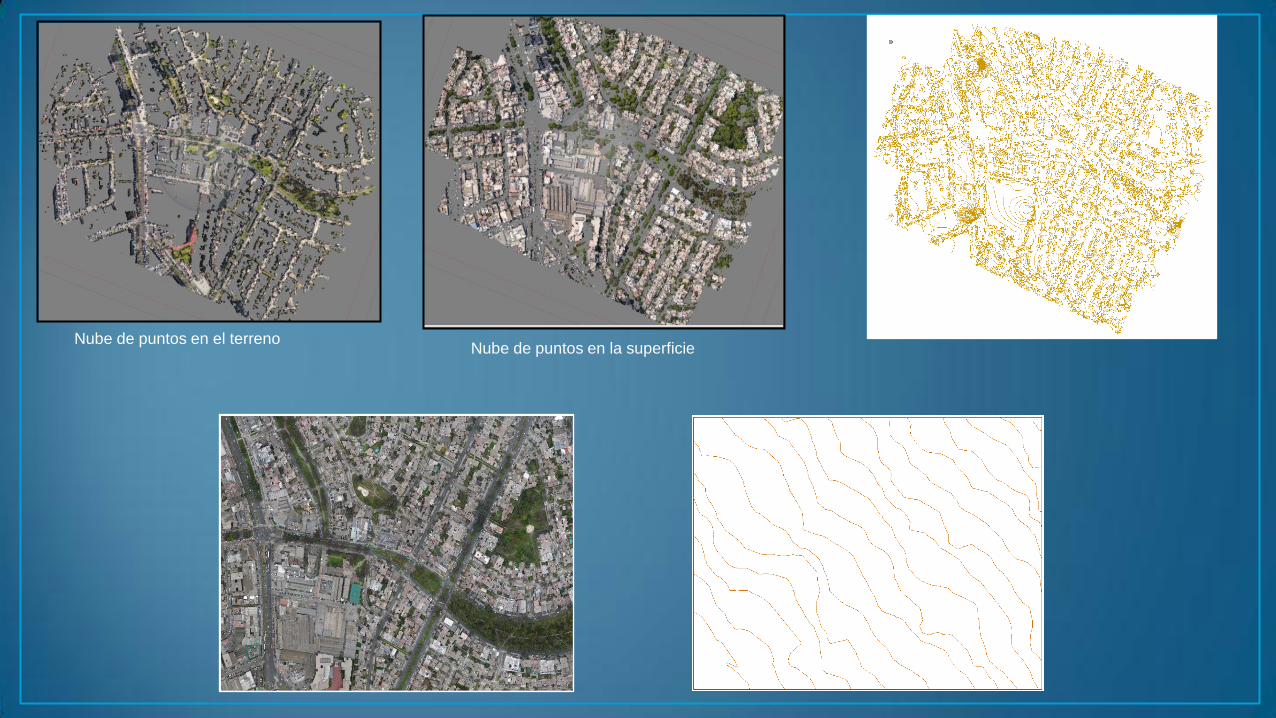
Nube de puntos en el terreno Nube de puntos en la superficie
Si es factible realizar la Cartografía con imágenes obtenidas con RPA, con
precisiones para una escala 1:1000.
Para la captura de la información se debe realizar por el método fotogramétrico
mediante el modelo estereoscópico, esto nos permite visualizar y corregir mejor los
errores.
La resolución de las imágenes que se recomienda debe ser entre 4 y 6 cm de GSD.
Se debe realizar los pre- marcados y una buena distribución de los puntos, esto
permitirá garantizar la precisión del proyecto.
Debemos de reorientar nuestra filosofía en el equipamiento y manejo de la
información.
Los RPA son una alternativa de solución a bajo costo básicamente para cubrir áreas
relativamente pequeñas.

Muchas Gracias