presentación entrega final
TRANSCRIPT
Universidad Simón BolívarRobótica
AMICUProf. Cecilia Murrugarra
Arnal, Mariela 09-10053Bermúdez, Gabriela 08-10115Figueira, Ana Cristina 09-10288Pierluissi, Daniel 09-10658Rivero, Paola 09-10719
28 de Marzo de 2012
(Automatic Mirror Cutter)

Definición
• Robot de Corte de Espejos• Industria vidriera• Inicialmente pensado para
cortes circulares• Por simplicidad se diseñó para
cortar un planchón de vidrio en 4 “cuadrantes”
AMICU

- Área de Trabajo: 3m x 3m- Trayectoria: Dos líneas rectas perpendiculares.- Fijo en el Techo- Resistente y Liviano
Descripción0,10m
0,95m
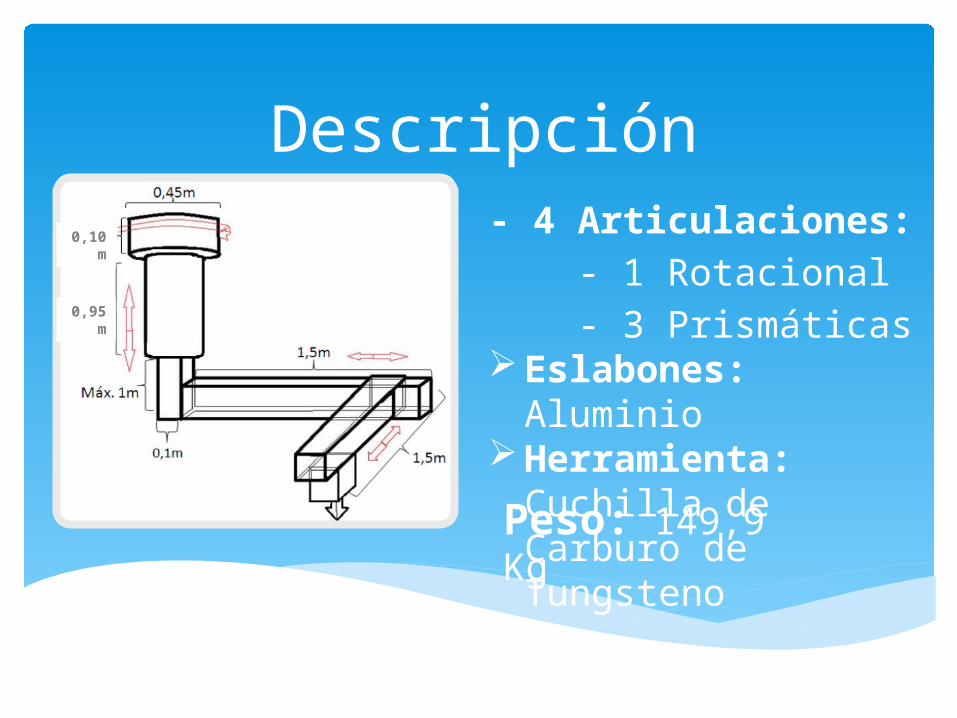
Peso: 149,9 Kg
- 4 Articulaciones: - 1 Rotacional - 3 PrismáticasEslabones:
AluminioHerramienta:
Cuchilla de Carburo de Tungsteno
0,10m
0,95m
Descripción

0,10m
0,95m
Dimensiones
Cinemática DirectaTransformación de Denavit -
Hatenberg

q1
q3
q4
q2
ϴi di ai αi
Eslabón 1
q1 L1 0 0°
Eslabón 2
90° q2 0 90°
Eslabón 3
-90° q3 0 -90°
Eslabón 4
0° q4 0 0°
Link 1
Link 2
Link 3
Link 4
Z1
X1
Y1
Zo
Xo
Yo
Z2
X2Y2
Z3
X3
Y3
Z4
X4
Y3

Cos (q1)
-Sen(q1) 0 0
Sen(q1
)Cos(q1) 0 0
0 0 1 L1
0 0 0 1
A01
= A12 0 0 1 0
1 0 0 0
0 1 0 q2
0 0 0 1
=
A23= 0 0 1 0
-1 0 0 0
0 -1 0 q3
0 0 0 1
A34 1 0 0 0
0 1 0 0
0 0 1 q4
0 0 0 1
=
A04 0 -Cos
(q1)-Sen (q1)
q3Cos(q1) – q4Sen(q1)
0 -Sen(q1)
Cos(q1) q3Sen(q1) + q4Cos(q1)
-1 0 0 L1 + q2
0 0 0 1
== A01
A12
A23
A34
* * *

Cinemática Inversa
Valor de las articulaciones en función del extremo terminal
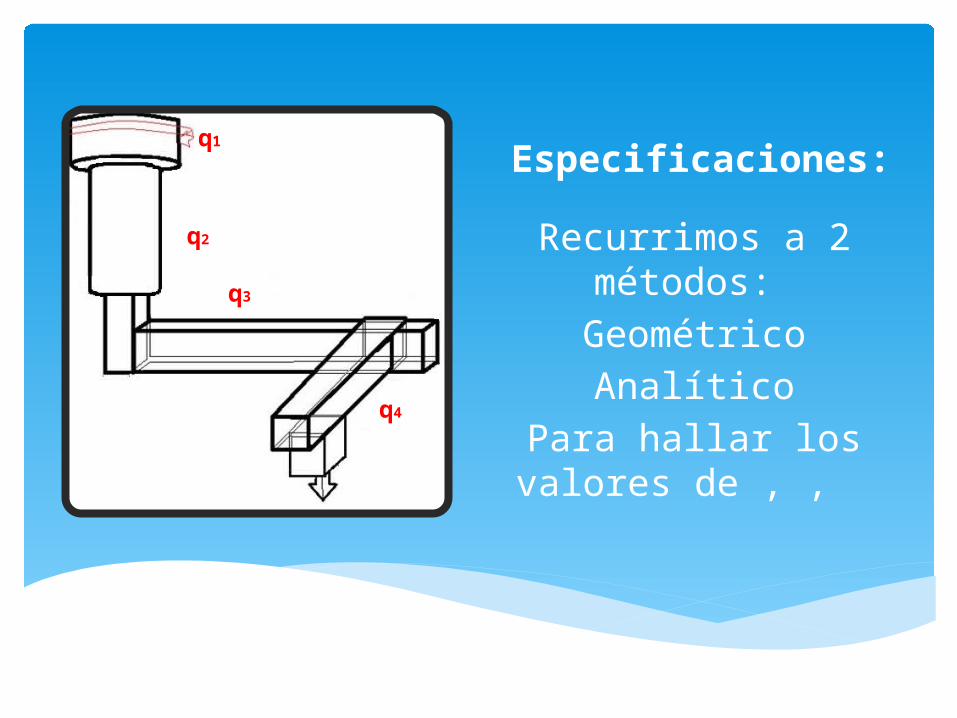
Especificaciones:
Recurrimos a 2 métodos:
GeométricoAnalítico
Para hallar los valores de , ,
q1
q3
q4
q2
Cinemática Inversa
q2 = Pz – 100 (cm)
Y se obtuvo:
=
q3
q = arctan()
Velocidad Cinemática

Velocidad Cinemática
X =. Vx
Vy
Vz
ωx
ωy
ωz
=
-q3S1-q4C1
0 c1 -s1
q3C1-q4S1
0 s1 c1
0 1 0 0
0 0 0 0
0 0 0 0
1 0 0 0
q1’
q2’
q3’
q4’
*Jl
Jω *q. =
J
Singularidades
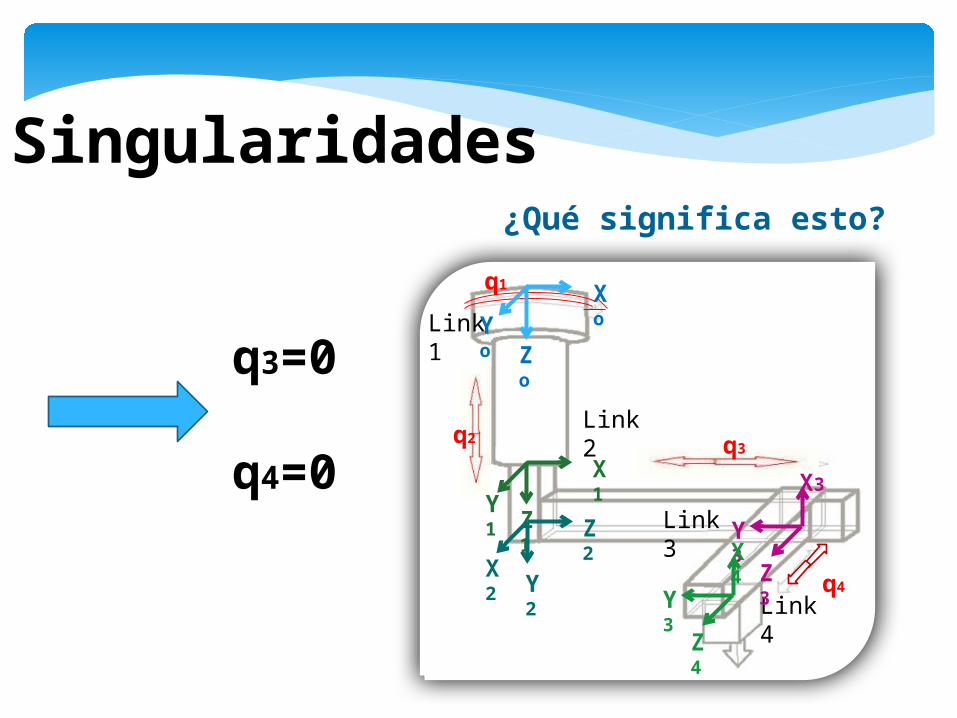
q3=0
q4=0
¿Qué significa esto?
q1
q3
q4
q2
Link 1
Link 2
Link 3
Link 4
Z1
X1Y
1
Zo
XoY
o
Z2
X2 Y
2
Z3
X3
Y3
Z4
X4
Y3
Singularidades

DinámicaCálculo de las Ecuaciones de
Movimiento
q1
q3
q4
q2
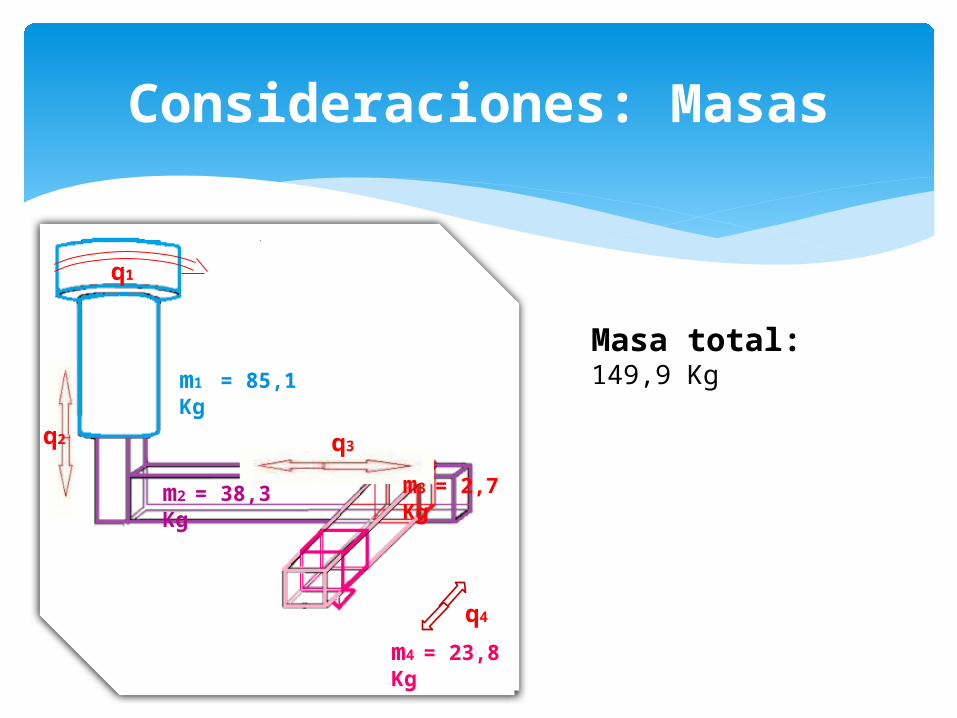
m1 = 85,1 Kg
m2 = 38,3 Kg m3 = 2,7 Kg
m4 = 23,8 Kg
Masa total: 149,9 Kg
Consideraciones: Masas

[cm]
Zo
Xo
𝒓𝟏
cm
a = 35,7cm
X1
Z1
Cálculos: Posición Centro de masa
(usando como sistema de referencia el sistema 1)
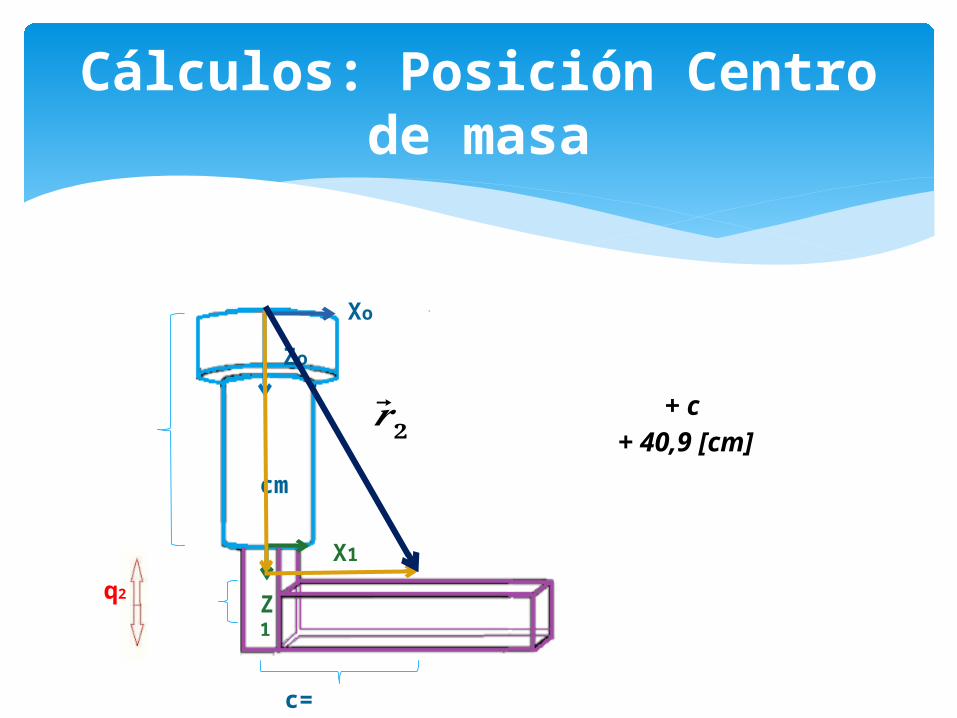
+ c + 40,9 [cm]
Zo
Xo
𝒓𝟐
cm
X1
Z1
Cálculos: Posición Centro de masa
q2
c= 40,9cm

[cm]Zo
Xo
𝒓𝟑
cm
X1
Z1
q3
q2
Cálculos: Posición Centro de masa

q3
Zo
Xo
𝒓𝟒
𝒄𝒎𝟒
X1
Z1
[cm]
q2
Cálculos: Posición Centro de masa
q4
d = 64,8cm
e = 0,14cm

Cálculo de las Ecuaciones de Movimiento

Dinámica
Energía Cinética
K1 =
K2 =
K3 =
K4 =
= 10781 [Kg ] = 95781 [Kg ] = 74 [Kg ] = 38010 [Kg ]

Dinámica
U1 = U2 =
Energía Potencial
U3 = U4 =
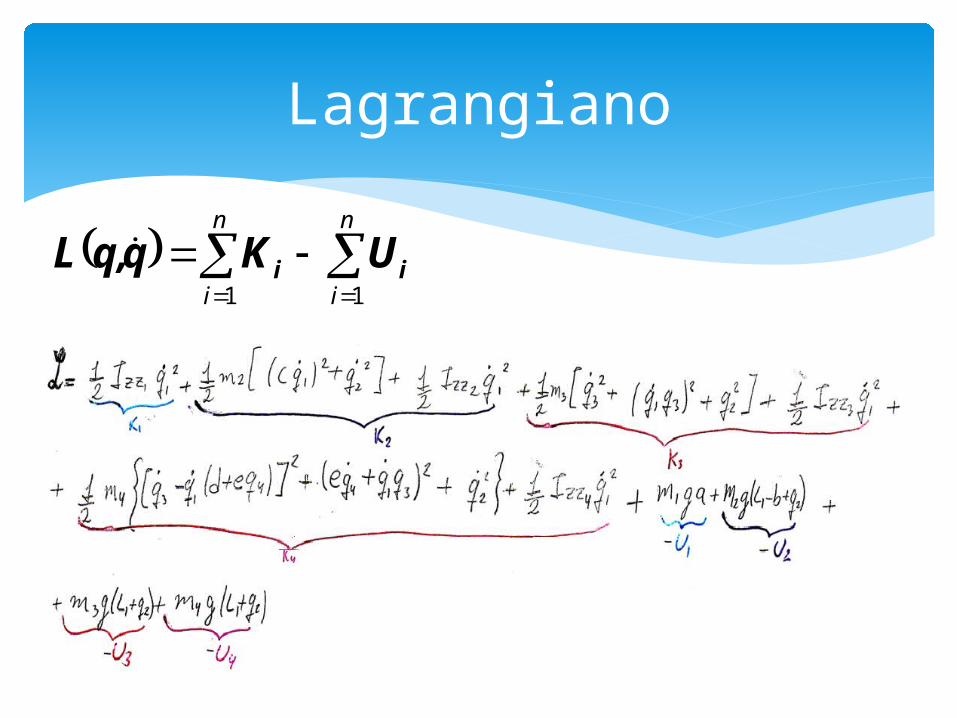
Lagrangiano
n
i
n
i 11ii UKqq,L
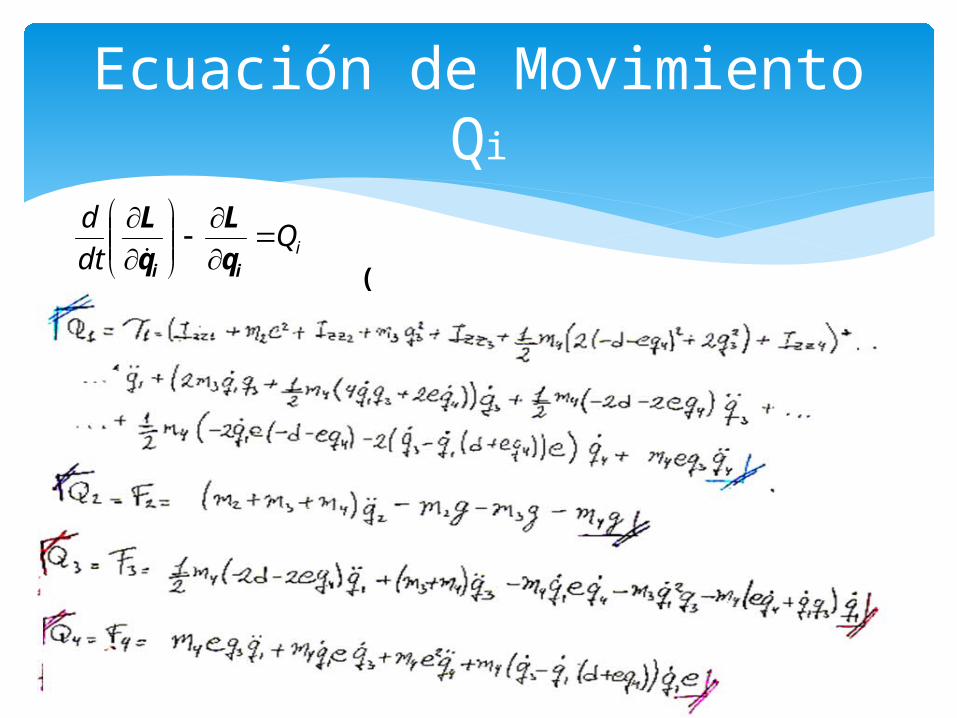
Ecuación de Movimiento Qi
iQdt
d
ii qL
qL (

Planificación de Trayectoria
Trayectoria LSPB

Objetivo real: Cortar espejos en formas circulares en cada uno de los 4 cuadrantes
Objetivo calculado: Cortar espejos de forma cuadrada, cuatro por cada planchón de vidrio
LA RAZÓN: Simplicidad para realizar los cálculos y la animación en Solidworks
Objetivos de las trayectorias

Espacio de trabajo
• Se consideró trabajar con Planchones de 3x3 m2.• Ecuaciones articulares a partir de los puntos cartesianos, pasados por laCinemática inversa• Vmáx por trayecto: 3 m/s• Vcorrea (5 seg. por planchón)• 2 trayectorias calculadas
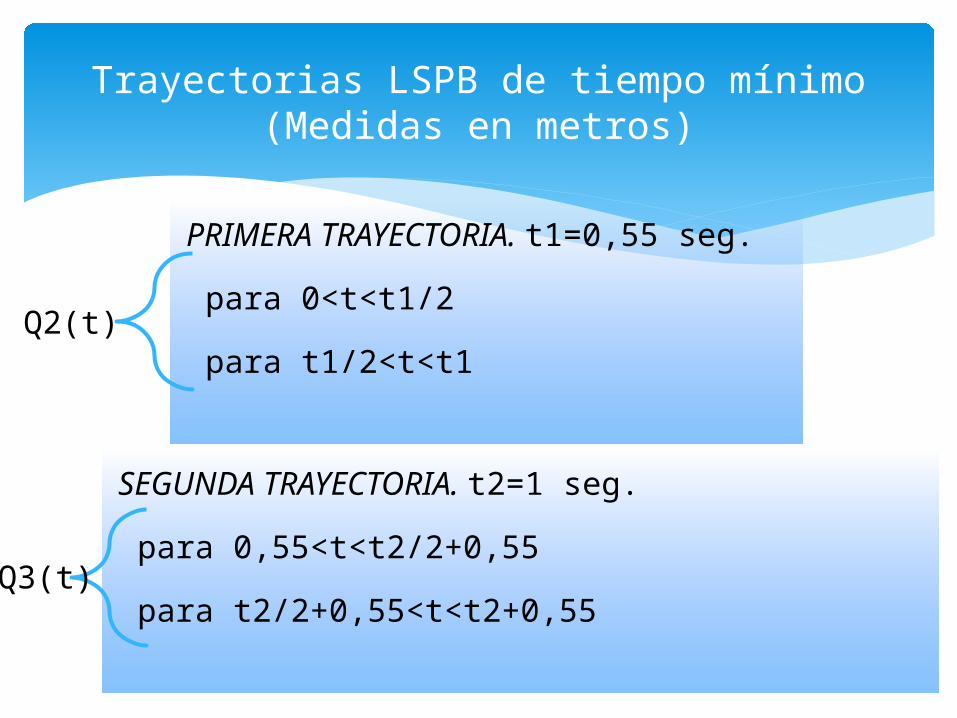
Trayectorias LSPB de tiempo mínimo(Medidas en metros)
PRIMERA TRAYECTORIA. t1=0,55 seg. para 0<t<t1/2
para t1/2<t<t1
SEGUNDA TRAYECTORIA. t2=1 seg. para 0,55<t<t2/2+0,55
para t2/2+0,55<t<t2+0,55
Q2(t)
Q3(t)

Selección de Motores

Selección de MotoresLas gráficas que obtuvimos del área de trabajo para cada motor de cada articulación son las siguientes:
Tao1 vs. w1
El torque máximo está cercano a 2.8Kg.cm^2/s^2 x 10^6. Es decir 280 Nm.

Se puede observar que el motor está un poco sobredimensionado, pero siguen siendo el mejor para soportar el
torque al cual está sometido nuestro
robot.
Selección de Motores
Motor 1
EB-404-B with size 4-1/50 from Kollmorgen

Selección de Motores
F2 vs V2
El torque maximo es de 6,9 Nm.
Mucho menor que el anterior y la
velocidad lineal es de 2,7 m/s

Selección de Motores
Motor 2
537A132-1 with 539A122 from Globe Motors

Selección de Motores
F3 vs V3
El torque maximo es cercano a 1.9
Nm y la velocidad lineal es de 2,8 m/s aproximadamente
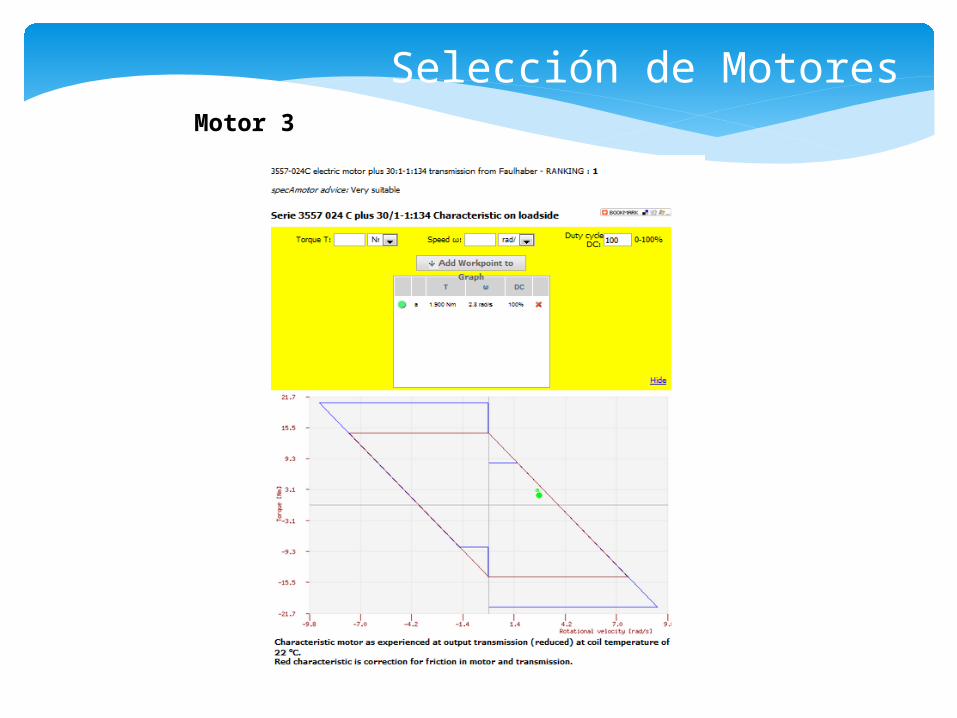
Selección de MotoresMotor 3
Selección de Motores
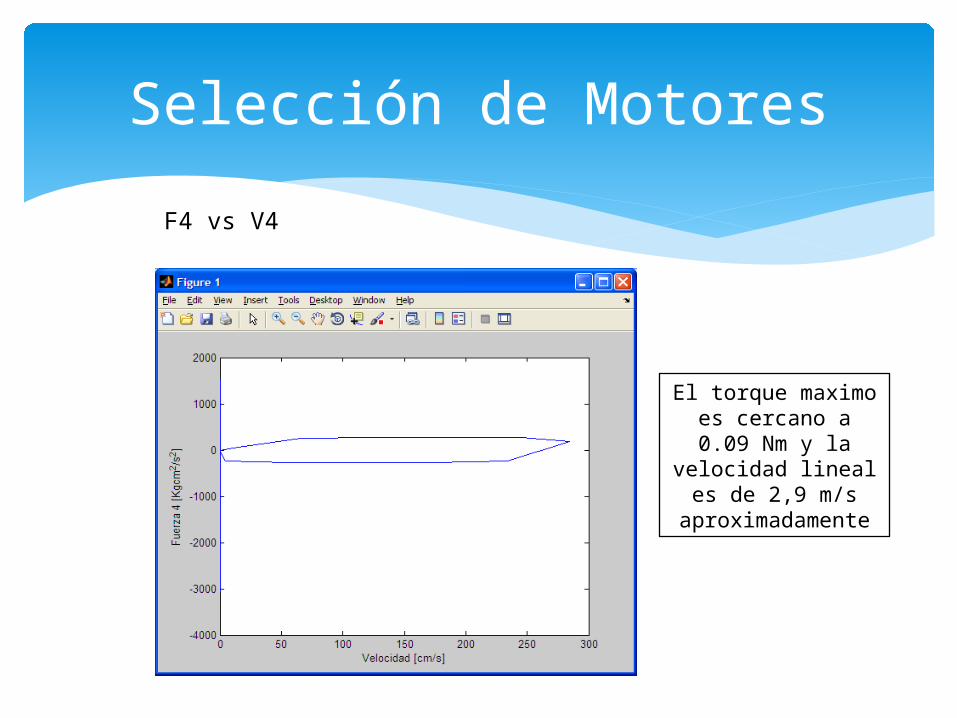
F4 vs V4
El torque maximo es cercano a 0.09 Nm y la velocidad
lineal es de 2,9 m/s aproximadamente
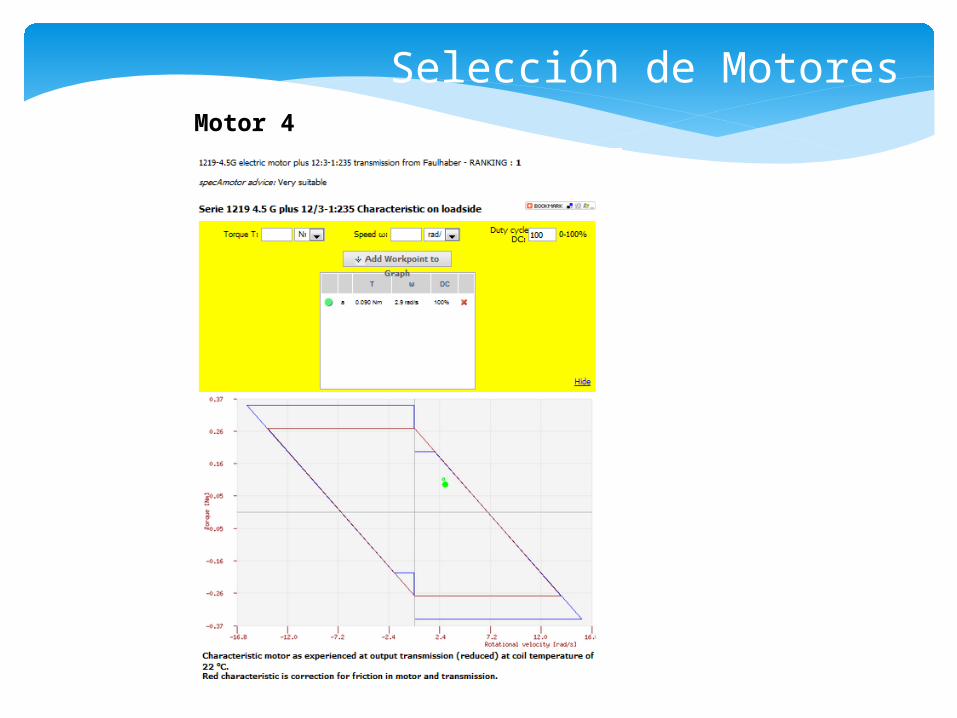
Selección de MotoresMotor 4

Selección de Sensores
Selección de Sensores
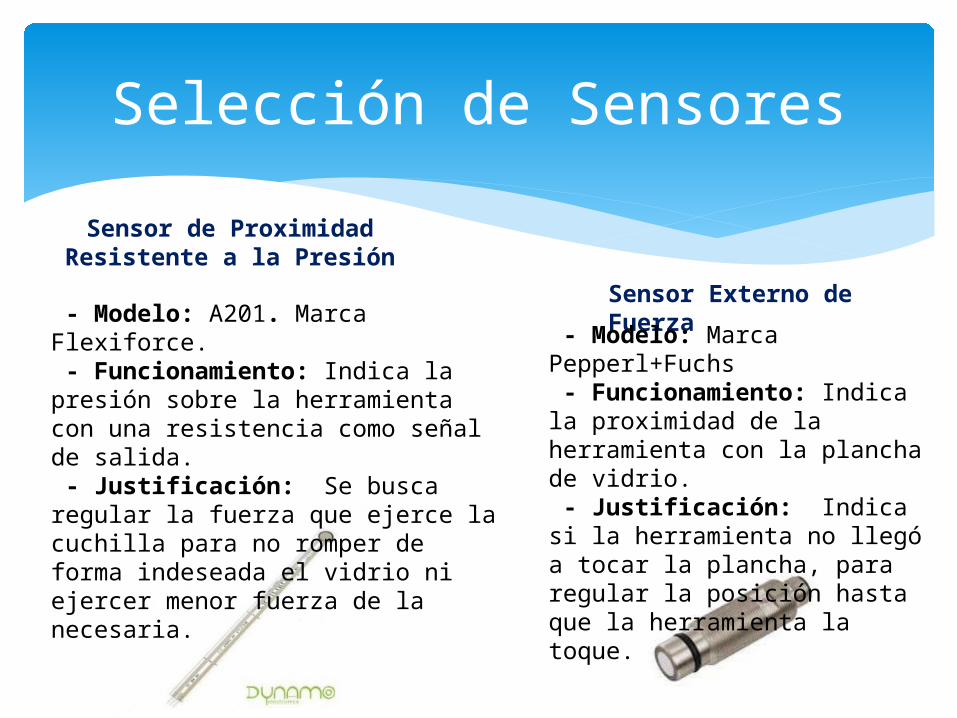
Sensor Externo de Fuerza
Sensor de Proximidad Resistente a la Presión
- Modelo: A201. Marca Flexiforce. - Funcionamiento: Indica la presión sobre la herramienta con una resistencia como señal de salida. - Justificación: Se busca regular la fuerza que ejerce la cuchilla para no romper de forma indeseada el vidrio ni ejercer menor fuerza de la necesaria.
- Modelo: Marca Pepperl+Fuchs - Funcionamiento: Indica la proximidad de la herramienta con la plancha de vidrio. - Justificación: Indica si la herramienta no llegó a tocar la plancha, para regular la posición hasta que la herramienta la toque.

Análisis de Costos

Análisis de Costos
- Sensores: $66.5 + $50 = $116.5- Motores: Esperando presupuesto- Cuchilla: Desde $23,25 hasta $69,67- Aluminio y Elaboración: Poco Preciso.
- Aluminio como materia prima: 149,85Kg -> De $299,7 a $374,625
- Brazos Robóticos Similares: De $36.000 a $50.000
- Estimación Total de Costo: $40.000

Diseño en Solidworks

Diseño en SolidWorksPiezas Separadas

Diseño en SolidWorksEnsamblaje
Vista Isométrica
Vista Inferior

Animación

GRACIAS POR SU ATENCIÓN