presentation master sege
TRANSCRIPT

MODÉLISATION DES PERTES DANS LES
CONVERTISSEURS STATIQUES POUR LA
COMMANDE DES MACHINES RAPIDES
Khaled ALMAKSOUR
Institut de Recherche en Electrotechnique et Electronique
de Nantes Atlantique
Saint-Nazaire
Encadrants:
Nicolas BERNARD
Jean-Cristophe Olivier

Le plan
Introduction
Interrupteur idéal et réel
Les pertes dans l’interrupteur
Modèle des pertes en commutation et en
conduction
L’évolution des pertes et l’écart relatif
L’effet de la fréquence de découpage
Influence de l’ondulation
Influence de la variation de tension de bus DC
L’effet de temps morts
La planification future
2

Contexte
Optimisation de la commande des machines rapides
Problématique Trouver un modèle analytique simple et assez
précis pour calculer les pertes dans les convertisseurs statiques
3

Un bras de pont
La commande est réalisée par MLI
Udc
K1
K2
+ -
Ich
Vt
Comparateur
Vcde
Vch 1
4

Interrupteur idéal et réel Dans l’interrupteur idéal la commutation est instantané( produit
tension-courant est nul)
La chute de tension est nulle aux bornes du transistor pendant la conduction
Dans l’interrupteur réel les pertes existe car la commutation n’est pas instantanée
La chute de tension est existe pendant la conduction
vk ik
t
ik vk
temps temps 5

Formes d’ondes simplifiée Phase
1
Phase 3
t
t
VT1 on
Irrm
it1
Phase 2
Irrm
- Udc
Udc
Ich
id2
vce
1
VD2 on
Ich
ik1 vk1
ik2 vk2
Phase 4
vd2
6

Plan des pertes
pertes
Transistor
Commutation
Ouverture Fermeture
Conduction État bloqué
Diode
État bloqué Conduction Commutation
Ouverture Fermeture
7

Des approximations considérées
Les pertes été calculées avec les
approximations suivantes:
L’ondulation du courant de charge est
nulle (Δi=0)
La tension de bus continue est constante
L’effet de temps morts est négligeable
8

Calcule des pertes
Les pertes dans une période de
découpage suit la règle suivante:
9
Les pertes à la fermeture
du transistor
tr
Udc
Irrm
ic
t
Ich
ic , vce
vce
Pertes en commutation

Pertes en conduction
Vce= rf Ic + vce0
Les pertes en conduction du transistor :
10

L’évolution des pertes et l’écart relatif
L’écart relative mois de 14%
0
2
4
6
8
10
12
14
0 2 4 6 8 10 12 14 16
ε%
Ich (A)
0
10
20
30
40
50
60
70
80
-20 -15 -10 -5 0 5 10 15 20
les
perte
s (w
att
)
Ich (A)
pertes calculées pour fd=20
kHz
pertes mesurées pour
fd=20 kHz
11

La répartition des pertes
dans le transistor pour fd=20 kHz
Les pertes en conduction sont plus importante
pour des valeurs faibles de courant et de la
fréquence de découpage
Ich A PT conduction (W) PT fermeture (W) PT ouverture (W)
1.82 78% 5% 17%
4.65 85% 6% 9%
7.45 85.5% 7% 7.5%
10.3 86% 7% 7%
12

L’effet de la fréquence de découpage
Pour les basse fréquences et les courants faibles
(10A) les pertes en commutation restent faibles
Pour les hautes fréquences et les courants forts
(50A) les pertes en commutation deviennent plus importantes
0
20
40
60
80
100
120
0 20 40 60
perte
s %
fd (kHz)
pertes en
conduction %
pertes en
commutation %
0
10
20
30
40
50
60
70
80
90
100
0 20 40 60
perte
s %
fd (kHz)
13

Influence de l’ondulation
l’écart relative des pertes reste faible
pour des valeurs faibles de l’inductance de
charge (Lch=3mH , Lch=6mH)
-10
-5
0
5
10
15
20
25
30
0 0,2 0,4 0,6 0,8 1 1,2
∆ P
%
ρ
14

Influence de la variation de tension
de bus DC
Chute de tension existe à cause de
l’impédance interne de la source de la
tension continue
86
88
90
92
94
96
98
100
102
0 5 10 15
Ud
c (
v)
Ich (A)
0
5
10
15
20
25
0 0,2 0,4 0,6 0,8 1 1,2
ε %
ρ
15

L’effet de temps morts
Le rapport cyclique réel est de (ρ - ρm) au
lieu de ρ
ρ.Td (1-ρ).Td
1
0 t
t
Udc
-Udc
Vch
ρ.Td (1-ρ).Td
Commande sans temps morts
1
t
1
0
(ρ- ρm)Td
(1-ρ+ ρm)Td
ρm.Td t
Udc
-Udc
t
Vch
Commande avec temps morts
Vch
Udc
T1
Ich
D1
T2 D2
16
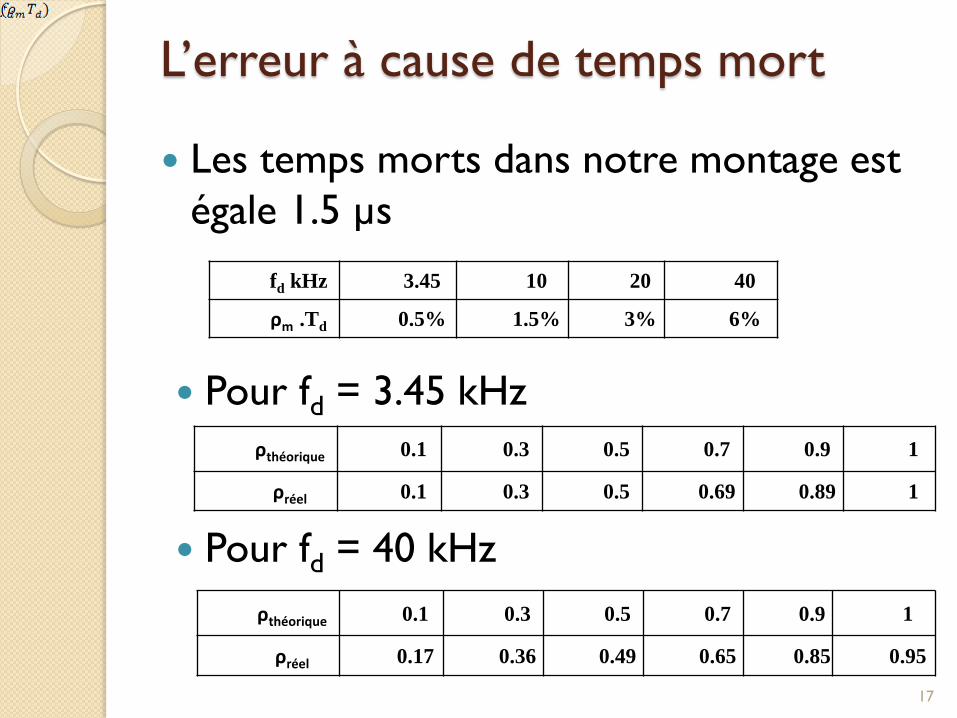
L’erreur à cause de temps mort
Les temps morts dans notre montage est
égale 1.5 µs
17
fd kHz 3.45 10 20 40
ρm .Td 0.5% 1.5% 3% 6%
Pour fd = 3.45 kHz
ρthéorique 0.1 0.3 0.5 0.7 0.9 1
ρréel 0.1 0.3 0.5 0.69 0.89 1
Pour fd = 40 kHz
ρthéorique 0.1 0.3 0.5 0.7 0.9 1
ρréel 0.17 0.36 0.49 0.65 0.85 0.95

La planification future
Validation pratique du modèle pour des
courants forts
18