primerjalna analiza metode neposredne regulacije tokaev.fe.uni-lj.si/4-2003/ambrozic.pdf ·...
TRANSCRIPT

Elektrotehniski vestnik 70(4): 172–177, 2003Electrotechnical Review, Ljubljana, Slovenija
Primerjalna analiza metode neposredne regulacije toka
Vanja Ambrozic, David NedeljkovicFakulteta za elektrotehniko, Trzaska 25, 1000 Ljubljana, SlovenijaE-posta: vanjaa, [email protected]
Povzetek. Clanek opisuje novi metodi za neposredno regulacijo izmenicnega toka v trifaznem sistemu (DCC).Prva temelji na izbiri med aktivnim in nicelnim prostorskim vektorjem napetosti v odvisnosti od tokovnegapogreska. Pri drugi metodi se izracunava trajanje vklopa aktivnega napetostnega vektorja, ki minimizira tokovnipogresek. V nadaljevanju sledi primerjava druge enacice DCC z uveljavljeno tokovno regulirano modulacijoprostorskega vektorja (CRSVM) glede na preklopne izgube, dinamiko, valovitost toka in obcutljivost naspremembe parametrov.
Kljucne besede: neposredna regulacija toka, pulzno-sirinska modulacija, tokovna regulacija, stikalna frekvenca
Comparative Analysis of the Direct Current Control Method
Extended abstract. This paper presents a comparison betweenthe Current Regulated Space Vector Modulation (CRSVM) [1,2]and a novel method for Direct Current Control (DCC) [3]. Inboth cases the current response was tested on a passive load witha small time constant (T = 1.2 ms; R = 3.5 Ω, L = 4.2 mH).DCC is similar to the time-synchronized on-off method, whichgives poor results at low sampling frequency (2) compared toCRSVM.
The first task of DCC is to choose the appropriate voltagespace vector (transistors’ combination) pointing towards the cur-rent error vector (4). Since the final current at the end of thesampling interval can be predicted ((3), (4)), one can evaluatewhether it is better to apply the active voltage vector or the nullvector, following the appropriate criteria (7). This is the princi-ple of the first DCC variant. The switching frequency is muchlower than the one in the time-synchronized on-off method, asshown in 1. However, the high ripple still remains because ofthe occasional application of the active voltage throughout theentire sampling interval TS .
In the second DCC variant, the application time of the activevoltage (T1−6) inside TS is calculated using (11). This type ofmodulation produces a much lower current ripple but increasesthe switching frequency compared with the first variant (8).
Next, the second variant of DCC is compared to CRSVMwith an optimally tuned PI controller. CRSVM always pro-duces six transistors’ commutations during the modulation in-terval (TSVM ), whereas the number of commutations in DCCdepends on the selected voltage vectors. However, the max-imum number of commutations never exceeds three per sam-pling interval if the zero vector is generated using the optimaltransistors’ combinations (000 or 111), as shown in Figure 6.Therefore, as far as switching losses are concerned, CRSVM iscomparable to DCC with TS = 1/2 TSVM . This statement issupported by counting the commutations as presented in Table1. Figure 8 shows the step response of one phase current in athree-phase system for CRSVM (TSVM = 100 µs) and DCC(TS = 50 µs). The current ripple in both approaches is of thesame order, but the dynamics of DCC is much better. The ris-ing time in CRSVM can be reduced by increasing the dynamicerror.
The effect of load parameter variations has small influence
Prejet 30. oktober, 2002Odobren 24. januar, 2003
on the overall behavior of CRSVM. On the other side, load pa-rameters play an important role in DCC equations. However,even with a considerable parameter misidentification, alterationsin the current response are minimal (Figure 9).
Key words: direct current control, pulse-width modulation, cur-rent control, switching frequency
1 Uvod
Potreba po kakovostni regulaciji toka se pogosto pojavljav aplikacijah mocnostne elektronike (npr. pri elektro-motorskih pogonih, elektrokemicnih procesih, aktivnihfiltrih itd.). Splosno sprejeta metoda v vecfaznih sis-temih temelji na uporabi napetostnega vira, ki mu je su-perponirana tokovna regulacijska zanka. Za modulacijonapetosti se uporablja pulzno-sirinska modulacija (angl.PWM – pulse width modulation) oz. v novejsem casunjena enacica modulacija prostorskega vektorja (angl.SVM – space vector modulation), ki je zelo primernaza realizacijo na mikroprocesorjih [1,2,5]. Tako gener-irana napetost dobro sledi zeleni vrednosti, tudi prinizjih frekvencah modulacije. Za tokovno regulacijo seobicajno uporablja proporcionalno-integralni (PI) regula-tor, ki ga dimenzioniramo glede na parametre bremena.Prednost metode v primerjavi z drugimi je dokaj majhnavalovitost toka.
Obstajajo pa tudi metode, kjer se namesto izracunazahtevane napetosti in njene modulacije na bremeneposredno vsili najvisja mozna napetost, ki jo omogocaenosmerni vmesni tokokrog. Izbira kombinacije tranzis-torjev in s tem tudi izbira med sestimi prostorskimivektorji enosmerne napetosti je odvisna od tokovnega
Primerjalna analiza metode neposredne regulacije toka 173
pogreska. Pri t.i. delta (histerezni ali bang-bang)regulaciji se napetost vsili takoj, ko tokovni pogresekpreseze doloceno dopustno vrednost [1,2]. Pri casovno-diskretnem principu (angl. time-synchronized on-off,nem. zeitdiskret) je vsiljena napetost odvisna od predz-naka tokovnega pogreska, ki pa se vzorci v pravilnihcasovnih intervalih [2,3]. Za obe metodi je znacilna pre-prosta elektronik. Po drugi strani pa pri prvem pristopustikalna frekvenca ni vnaprej znana in je lahko zelo vi-soka, kar povzroca vecje stikalne izgube. Maksimalnastikalna frekvenca drugega pristopa je vnaprej dolocena,obicajno pa mora biti visoka (npr. 50 kHz ali celo 100kHz), ce zelimo doseci majhno valovitost toka. Prednostobeh metod je neodvisnost krmilnega postopka od naravebremena.
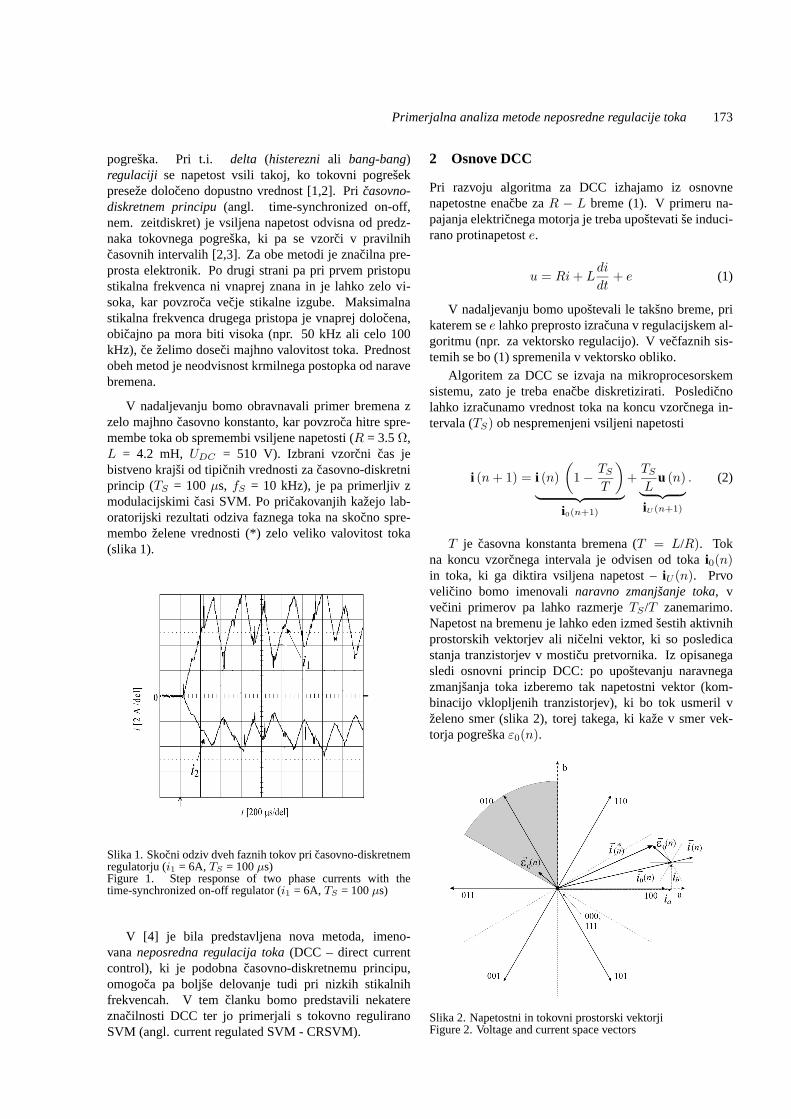
V nadaljevanju bomo obravnavali primer bremena zzelo majhno casovno konstanto, kar povzroca hitre spre-membe toka ob spremembi vsiljene napetosti (R = 3.5 Ω,L = 4.2 mH, UDC = 510 V). Izbrani vzorcni cas jebistveno krajsi od tipicnih vrednosti za casovno-diskretniprincip (TS = 100 µs, fS = 10 kHz), je pa primerljiv zmodulacijskimi casi SVM. Po pricakovanjih kazejo lab-oratorijski rezultati odziva faznega toka na skocno spre-membo zelene vrednosti (*) zelo veliko valovitost toka(slika 1).
Slika 1. Skocni odziv dveh faznih tokov pri casovno-diskretnemregulatorju (i1 = 6A, TS = 100 µs)Figure 1. Step response of two phase currents with thetime-synchronized on-off regulator (i1 = 6A, TS = 100 µs)
V [4] je bila predstavljena nova metoda, imeno-vana neposredna regulacija toka (DCC – direct currentcontrol), ki je podobna casovno-diskretnemu principu,omogoca pa boljse delovanje tudi pri nizkih stikalnihfrekvencah. V tem clanku bomo predstavili nekatereznacilnosti DCC ter jo primerjali s tokovno reguliranoSVM (angl. current regulated SVM - CRSVM).
2 Osnove DCC
Pri razvoju algoritma za DCC izhajamo iz osnovnenapetostne enacbe za R − L breme (1). V primeru na-pajanja elektricnega motorja je treba upostevati se induci-rano protinapetost e.
u = Ri + Ldi
dt+ e (1)
V nadaljevanju bomo upostevali le taksno breme, prikaterem se e lahko preprosto izracuna v regulacijskem al-goritmu (npr. za vektorsko regulacijo). V vecfaznih sis-temih se bo (1) spremenila v vektorsko obliko.
Algoritem za DCC se izvaja na mikroprocesorskemsistemu, zato je treba enacbe diskretizirati. Posledicnolahko izracunamo vrednost toka na koncu vzorcnega in-tervala (TS) ob nespremenjeni vsiljeni napetosti
i (n + 1) = i (n)(
1− TST
)︸ ︷︷ ︸
i0(n+1)
+TSL
u (n)︸ ︷︷ ︸iU (n+1)
. (2)
T je casovna konstanta bremena (T = L/R). Tokna koncu vzorcnega intervala je odvisen od toka i0(n)in toka, ki ga diktira vsiljena napetost – iU (n). Prvovelicino bomo imenovali naravno zmanjsanje toka, vvecini primerov pa lahko razmerje TS /T zanemarimo.Napetost na bremenu je lahko eden izmed sestih aktivnihprostorskih vektorjev ali nicelni vektor, ki so posledicastanja tranzistorjev v mosticu pretvornika. Iz opisanegasledi osnovni princip DCC: po upostevanju naravnegazmanjsanja toka izberemo tak napetostni vektor (kom-binacijo vklopljenih tranzistorjev), ki bo tok usmeril vzeleno smer (slika 2), torej takega, ki kaze v smer vek-torja pogreska ε0(n).
Slika 2. Napetostni in tokovni prostorski vektorjiFigure 2. Voltage and current space vectors

174 Ambrozic, Nedeljkovic
Pri visoki napetosti vmesnega tokokroga (UDC), maj-hni induktivnosti bremena ali dolgem intervalu vzorcenjapopelje vsiljena napetost tok na koncu intervala dalecstran od zelene vrednosti. Ideja DCC je v iskanju nacinaza zmanjsanje tega pogreska. Tukaj bomo predstavili dvapristopa.
2.1 Prva enacica DCC
Izvajanje DCC na mikroprocesorju zahteva zapis tokovneenacbe v stacionarnem koordinatnem sistemu
ia,b (n + 1) = ia,b (n)(
1− TST
)︸ ︷︷ ︸
i0a,b(n+1)
+TSL
ua,b (n)︸ ︷︷ ︸iUa,b(n+1)
, (3)
kjer sta komponenti napetostnega prostorskega vektorjadefinirani kot
ua,b (n) = UDC
[KUa (n)KUb (n)
]=
= UDC
[23 − 1
3 − 13
0 1√3− 1√
3
]·
sT1
sT2
sT3
.
(4)
sT1, sT1 in sT1 so stanja zgornjih tranzistorjev vmosticu (0 ali 1).
Tokovne pogreske lahko definiramo kot (slika 3)
ε0a,b (n + 1) = i∗a,b (n)− i0a,b (n + 1)εUa,b (n + 1) = i∗a,b (n)− ia,b (n + 1) =
= ε0a,b (n + 1)− iUa,b (n + 1)∆ia,b (n) = i∗a,b (n)− ia,b (n) .
(5)
Slika 3. Definicija tokovnih pogreskovFigure 3. Definition of the current errors
Zaradi prej omenjenih razlogov se vcasih bolj splacaprepustiti tok naravnemu upadanju (nicelni napetostni
vektor), kot pa izbirati aktivni napetostni vektor v smeritokovnega pogreska. Kriterij za tako izbiro je ε2
U > ε20,
kjer velja
ε2U = ε2
Ua + ε2Ub in ε2
0 = ε20a + ε2
0b. (6)
Ob upostevanju (3), (4) in (5) dobimo koncni kriterijza izbiro nicelnega vektorja:
29TSL UDC > KUa (n)
(∆ia (n) + TS
T ia (n))+
+KUb (n)(∆ib (n) + TS
T ib (n)),
(7)
kjer je
u2a + u2
b =(
23UDC
)2
. (8)
Slika 4. Skocni odziv dveh faznih tokov pri prvi enacici DCC(i1 = 6A, TS = 100 µs)Figure 4. Step response of two phase currents with the first vari-ant of DCC (i1 = 6A, TS = 100 µs)
Algoritem za neenacbo (7) je zelo preprost in za-hteva minimalen procesorski cas. Ze prva primerjavadejanskega odziva na skocno spremembo zelenega toka(slika 4) s casovno-diskretno metodo (slika 1) kaze nabistveno zmanjsanje dejanske stikalne frekvence. Le-ta jeodvisna od parametrov bremena. Sprememba toka v pozi-tivni smeri ostane enaka, saj ob izbiri aktivnega napetost-nega vektorja le-ta vpliva na tok skozi celoten intervalvzorcenja.
2.2 Druga enacica DCC
Problem visoke valovitosti prve enacice DCC lahkoresimo z modulacijo napetosti, kjer je napetostni vektoraktiven le del vzorcnega casa (T1−6 < TS), med pre-ostalim casom (T0) pa bo tok naravno upadal (nicelnanapetost). Enacba (3) se spremeni v

Primerjalna analiza metode neposredne regulacije toka 175
ia,b (n + 1) ≈ ia,b (n)(
1− TST
)+
T1−6
Lua,b (n) . (9)
Kriterij za izbiro optimalnega casa vklopa je mini-mizacija koncnega pogreska
d(ε2U
)dT1−6
= 0. (10)
Ob upostevanju enacb (4), (5) in (9) dobimo
T1−6 (n + 1) == 9
4L
UDC
[KUa (n)
(∆ia (n) + TS
T ia (n))
++ KUb (n)
(∆ib (n) + TS
T ib (n))]
.
(11)
Pri tej enacici prihaja znotraj vzorcnega intervalavsakokrat do preklopa med nictim in aktivnim vektor-jem, stikalna frekvenca pa je odvisna od izbranih vek-torjev. Stevilo komutiranih tranzistojev pogojuje izbiratranzistorske kombinacije nictega vektorja (000 ali 111)ter naslednji (oz. predhodni) aktivni vektor. Odziv lab-oratorijskega modela kaze na obcutno zmanjsanje val-ovitosti toka (slika 5). Pomanjkljivost tega pristopa jepovecana stikalna frekvenca. Procesorski cas, potrebenza izracun casa prevajanja, je zelo kratek. Modulacijolahko izvedemo z enotami za PWM, ki so ze standardnidel vsakega sodobnega DSP krmilnika (v konkretnemprimeru TMS320F243 [5]).
3 Primerjava med DCC in tokovno reguliranoSVM
Drugo enacico DCC bomo primerjali s CRSVM gledena stikalno frekvenco, dinamiko, valovitost toka inobcutljivost na spremembo parametrov bremena. Taprimerjava je smiselna ob predpostavki, da je vzorcni cas(TS) DCC enak modulacijskemu casu CRSVM (TSVM ).
3.1 Stikalne izgube
Pri SVM je skupno stevilo preklopov vseh tranzistorjevznotraj TSVM vedno enako sest [5]. Po drugi strani jestevilo preklopov pri DCC odvisno od parametrov bre-mena in pretvornika. Vzorcni interval si delita neki ak-tivni vektor in nicelni vektor. Slednjega lahko ustvarimos tranzistorsko kombinacijo 000 ali 111. Ob premisljeniizbiri ene ali druge lahko precej zmanjsamo najvecjestevilo preklopov znotraj TS , ki bo enako najvec tri (slika6).
Iz tega sledi, da bo v najslabsem primeru stevilo prek-lopov (in s tem tudi stikalne izgube) DCC in SVM enakoob izbiri TS = 1/2 TSVM . Tabela 1 kaze primerjavo stevilapreklopov DCC in SVM, prestetih v 20 ms, pri gener-iranju sinusnega toka frekvence f = 50 Hz. Pri DCC
Slika 5. Skocni odziv dveh faznih tokov pri drugi enacici DCC(i1 = 6A, TS = 100 µs)Figure 5. Step response of two phase currents with the secondvariant of DCC (i1 = 6A, TS = 100 µs)
Slika 6. Maksimalno stevilo preklopov pri DCC ob optimalniizbiri kombinacije za nicelni vektorFigure 6. Maximum number of commutations using the optimalcombination for the zero vector in DCC
sta upostevani neoptimalna izbira nicelnega vektorja (les kombinacijo 000) ter optimalna izbira (000 ali 111).Krajsi vzorcni cas pri DCC ima za posledico manjso val-ovitost toka.
SVM DCC
TSVM = 100 µsTS = 100 µs TS = 50 µs
neopt. opt. neopt. opt.
1200 598 502 1168 1020
Tabela 1. Primerjava stevila preklopov med SVM in DCCTable 1. Comparison of the number of commutations in SVMand DCC
3.2 Dinamika in valovitost toka
V naslednjem koraku (slika 7) smo testirali odziveCRSVM in DCC na skocno spremembo komponent toka
176 Ambrozic, Nedeljkovic
na vrednosti isa = isb = 10 A. Po pricakovanjih je valovi-tost toka manjsa ob izbiri krajsega vzorcnega intervala.Zanimivo je prilagajanje tokov ob prehodnem pojavu, kiskusajo ohraniti skupni minimalni pogresek (10) na racundinamike.
Slika 7. Odzivi faznih tokov na skono spremembo pri DCC (TS= 100 µs, TS = 50 µs)Figure 7. Step response of the phase currents using DCC (TS =100 µs, TS = 50 µs)
Slika 8 kaze potek enega faznega toka ob uporabiCRSVM in DCC. Valovitost je pri obeh metodahprimerljiva. Po drugi strani je dinamika CRSVM slabsa.Razlog je v izbiri parametrov tokovnega PI regulatorja,pri cemer napravimo kompromis med dobro dinamiko inmajhnim dinamicnim pogreskom.
Slika 8. Skocni odziv faznega toka pri CRSVM (TSVM = 100µs) in DCC (TS = 50 µs)Figure 8. Step response of the phase current using CRSVM(TSVM = 100 µs) and DCC (TS = 50 µs)
3.3 Obcutljivost na spremembo parametrovbremena
Oba parametra bremena se med obratovanjem lahkospreminjata: upornost s temperaturo, induktivnost pa vodvisnosti od magnetilne krivulje.
Sprememba parametrov na CRSVM relativno malovpliva, zato v tem primeru lahko pricakujemo le nekolikospremenjeno dinamiko.
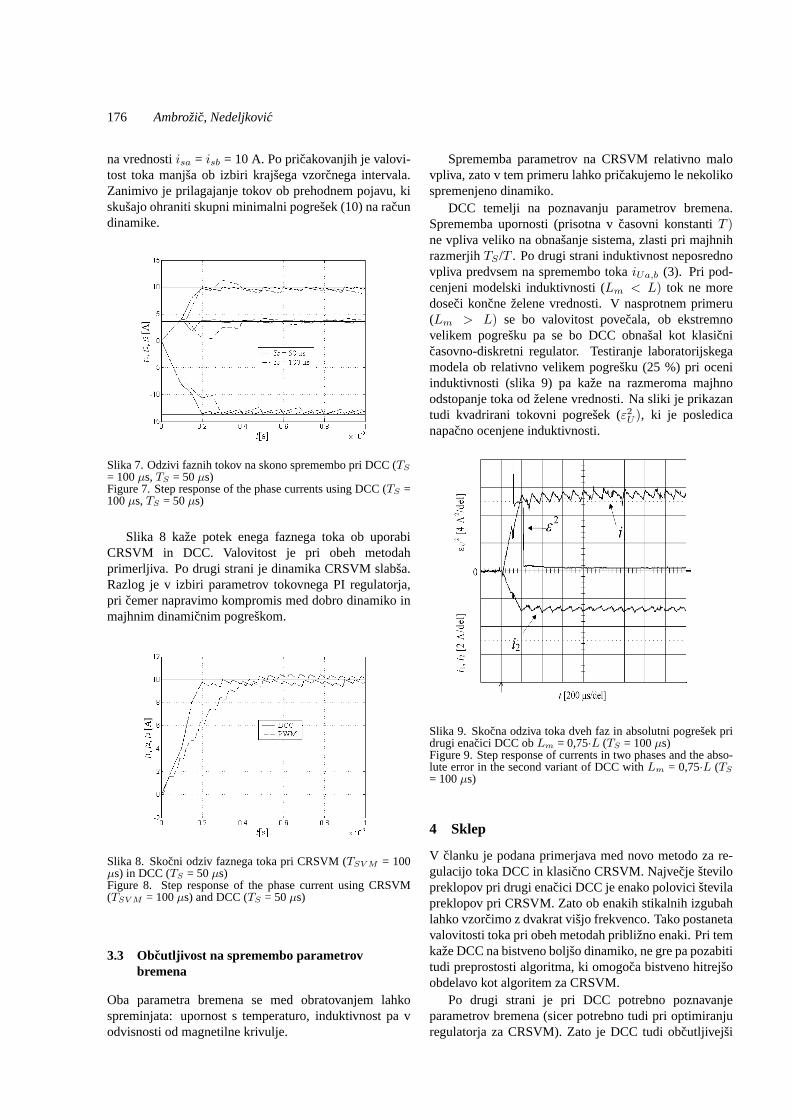
DCC temelji na poznavanju parametrov bremena.Sprememba upornosti (prisotna v casovni konstanti T )ne vpliva veliko na obnasanje sistema, zlasti pri majhnihrazmerjih TS /T . Po drugi strani induktivnost neposrednovpliva predvsem na spremembo toka iUa,b (3). Pri pod-cenjeni modelski induktivnosti (Lm < L) tok ne moredoseci koncne zelene vrednosti. V nasprotnem primeru(Lm > L) se bo valovitost povecala, ob ekstremnovelikem pogresku pa se bo DCC obnasal kot klasicnicasovno-diskretni regulator. Testiranje laboratorijskegamodela ob relativno velikem pogresku (25 %) pri oceniinduktivnosti (slika 9) pa kaze na razmeroma majhnoodstopanje toka od zelene vrednosti. Na sliki je prikazantudi kvadrirani tokovni pogresek (ε2
U ), ki je posledicanapacno ocenjene induktivnosti.
Slika 9. Skocna odziva toka dveh faz in absolutni pogresek pridrugi enacici DCC ob Lm = 0,75·L (TS = 100 µs)Figure 9. Step response of currents in two phases and the abso-lute error in the second variant of DCC with Lm = 0,75·L (TS= 100 µs)
4 Sklep
V clanku je podana primerjava med novo metodo za re-gulacijo toka DCC in klasicno CRSVM. Najvecje stevilopreklopov pri drugi enacici DCC je enako polovici stevilapreklopov pri CRSVM. Zato ob enakih stikalnih izgubahlahko vzorcimo z dvakrat visjo frekvenco. Tako postanetavalovitosti toka pri obeh metodah priblizno enaki. Pri temkaze DCC na bistveno boljso dinamiko, ne gre pa pozabititudi preprostosti algoritma, ki omogoca bistveno hitrejsoobdelavo kot algoritem za CRSVM.
Po drugi strani je pri DCC potrebno poznavanjeparametrov bremena (sicer potrebno tudi pri optimiranjuregulatorja za CRSVM). Zato je DCC tudi obcutljivejsi

na spremembe parametrov. Pri uporabi DCC na elektro-motorskih pogonih je treba dodatno upostevati induciraneprotinapetosti, kar omogocajo sodobnejsi regulacijski al-goritmi.
5 Literatura
[1] B. K. Bose, Modern Electronics and AC Drives, Prentice-Hall, NJ, 2002.
[2] W. Leonhard, Control of Electrical Drives, Springer-Verlag, Berlin, Heidelberg, New York, 1996.
[3] J. Roth-Stielow, Beitrage zu Pulsumrichtersystemen grosseLeistung mit nahezu sinusformigen Ausgangsstromen ho-her Frequenz, Dizertacija, Inst. fur Leistungselektronik undAnlagetechnik der Uni. Stuttgart, 1991.
[4] V. Ambrozic, R. Fiser, D. Nedeljkovic, “Direct CurrentControl – A New Current Regulation Principle” , IEEETrans. on Pow. Electronics, vol. 18, no. 1, Jan. 2003.
[5] Z. Yu, “Space-Vector PWM with TMS320C24x/F24x Us-ing Hardware and Software Determined Switching Pat-terns” , Application report, SPRA524, Texas Instruments,www.ti.com, 1999.
Vanja Ambrozic je studiral industrijsko elektrotehniko naFakulteti za elektrotehniko, kjer je diplomiral leta 1986, mag-istriral leta 1990 in doktoriral leta 1993. Od leta 1987 je za-poslen na Fakulteti za elektrotehniko. Kot docent (od leta 1996)predava predmete s podrocja mikroracunalniskega vodenja pro-cesov, regulacije elektromotorskih pogonov in krmilnih siste-mov. Njegovo raziskovalno delo je povezano z novimi prijemi vregulaciji in diagnostiki elektromotorskih pogonov.
David Nedeljkovic je diplomiral leta 1991, magistriral leta1996 in doktoriral leta 1998 na Fakulteti za elektrotehniko v Lju-bljani. V letih 1993–1998 je delal na Fakulteti za elektrotehnikokot mladi raziskovalec, sedaj pa je tam zaposlen kot asistent.Ukvarja se s problematiko digitalnega procesiranja na podrocjumocnostne elektronike. Leta 1996 je za magistrsko nalogo pre-jel nagrado dr. Vratislava Bedjanica.