problem solving: informed search - dieearmano/ia-bilingue/2005/slides/2.2 - heuristic... · problem...
TRANSCRIPT

Problem Solving: Informed Search
References● Russell and Norvig, Artificial Intelligence: A modern approach, 2nd ed.
Prentice Hall, 2003 (Chapters 1,2, and 4)● Nilsson, Artificial intelligence: A New synthesis. McGraw Hill, 2001
OutlineBest first search - Greedy search - A* search - Dijkstra's algorithmMore on best first search - Dominance - Relaxed problemsIterative improvement - Hill climbing - Simulated annealing

Informed (heuristic) Search
search
non-adversary
adversary
informed
uninformed
or “blind”
or “heuristic”

Informed (heuristic) SearchInformed search strategies, other than the
information available in the problem definition, use other information, such as heuristics to guide search towards a good solution
heuristic search

Heuristic search: Best first searchBest first search - Greedy search - A* search - Dijkstra's algorithmMore on best first search - Dominance - Relaxed problemsIterative improvement - Hill climbing - Simulated annealing
heuristic search: best first search

Recall the general tree search algorithmdefun TREE-SEARCH (problem, fringe) returns solution state ← INITIAL-STATE(problem) fringe.insert(MAKE-NODE(state)) loop do if EMPTY?(fringe) then return *FAILURE* node ← fringe.remove() if problem.GOAL-TEST?(STATE(node)) then return SOLUTION(node) children ← problem.EXPAND(node) for each node in children do fringe.insert(node)
The search strategy is defined by the order of node expansion !
heuristic search: best first search

Recall the general tree search algorithmdefun EXPAND(problem, node) returns successors successors ← {} --- set of NODES, initially empty for each action, state in problem.SUCCESSORS(STATE(node)) do child ← new NODE, child.parent ← node child.action ← action, child.state ← state step-cost ← problem.STEP-COST(STATE(node), action, state) child.cost ← COST(node) + step-cost child.depth ← DEPTH(node) + 1 successors.add(child) return successors
heuristic search: best first search

Best-first searchIdea:
For each node use an evaluation function, able to estimate the “goodness” of the node
The “goodness” of a node says how promising is the node towards the solution
Expand the “best” unexpanded node
Implementation: fringe is a queue sorted in decreasing order of “goodness”
Special cases:Greedy searchA* search
heuristic search: best first search
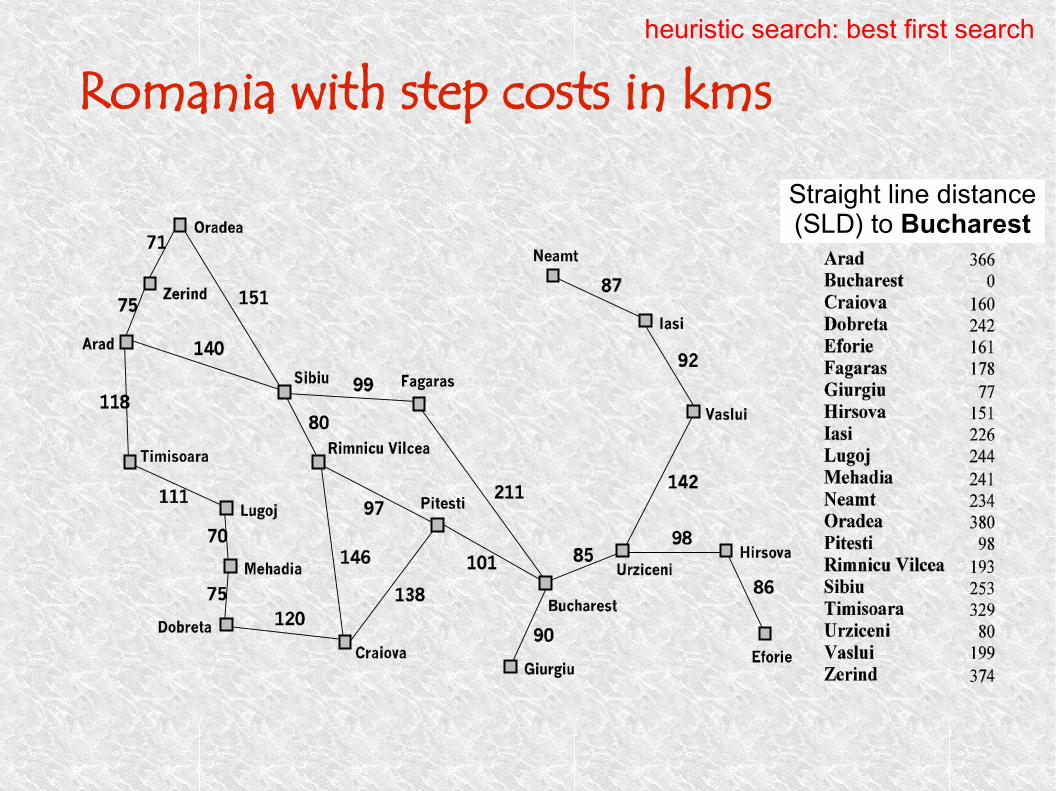
Romania with step costs in kms
Straight line distance (SLD) to Bucharest
heuristic search: best first search
Best first search: Greedy searchBest first search - Greedy search - A* search - Dijkstra's algorithmMore on best first search - Dominance - Relaxed problemsIterative improvement - Hill climbing - Simulated annealing
heuristic search: best first search: greedy search

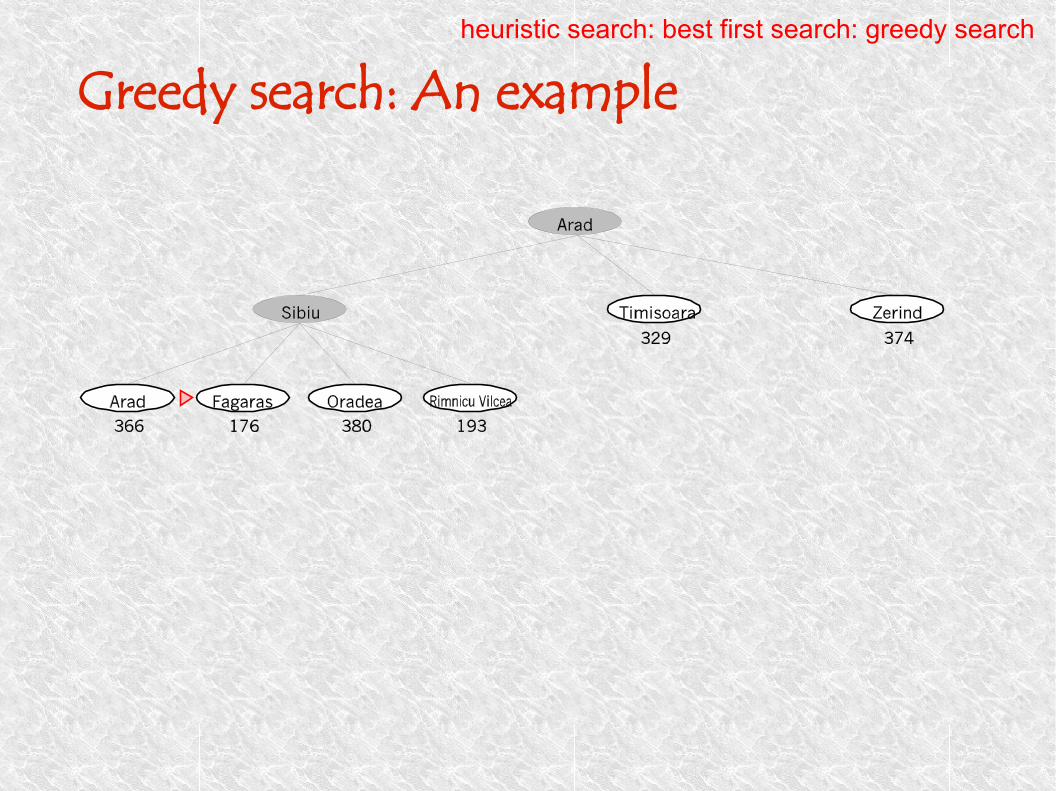
Greedy searchIdea: greedy search expands the node that
appears to be closest to the goalEvaluation function f(n) = h(n)
The cost for attaining the current node is not taken into account
Only an estimation about how “far” (in terms of cost) is the node from the goal is considered (e.g. hSLD(n) = straight-line distance from the current node n to Bucharest)
heuristic search: best first search: greedy search

Greedy searchImplementation: The intended behavior can be
ensured by using an ordered queue in which nodes are inserted according to the value returned by the function f(n) = h(n)
defun GREEDY-SEARCH(problem) returns solution return TREE-SEARCH ( problem, ordered-queue )
heuristic search: best first search: greedy search

Greedy search: An exampleheuristic search: best first search: greedy search
Greedy search: An exampleheuristic search: best first search: greedy search

Greedy search: An exampleheuristic search: best first search: greedy search

Greedy searchCompleteness:
NO —it can get stuck in loops, e.g. if Oradea is a goal, loop Lasi → Neamt → Lasi → Neamt
It is complete only under the assumption that state space is finite and that we check for repeated states
Time complexity:O(bm) --- recall that m = max depth of the search spaceA good heuristic can improve it tremendously
Space complexity:O(bm) --- keeps all nodes in memory
Optimality:No
heuristic search: best first search: greedy search

Best first search: A* searchBest first search - Greedy search - A* search - Dijkstra's algorithmMore on best first search - Dominance - Relaxed problemsIterative improvement - Hill climbing - Simulated annealing
heuristic search: best first search: A-star search

A* searchIdea: avoid expanding paths that are already
expensiveEvaluation function f(n) = g(n) + h(n) g(n) actual cost spent so far to reach n (from
the initial state) h(n) estimated cost to reach the goal (from the
current node n)In practice, uniform-cost search and greedy
search are “put together” to give rise to the most powerful algorithm in this category
heuristic search: best first search: A-star search

A* searchA* search uses an admissible heuristic h(n)
In other words, 0 ≤ h(n) ≤ h*(n), where h*(n) is the true cost from n to the goal (e.g. hSLD(n) never overestimates the actual driving distance)
By definition, h(G)=0 for any state G that satisfies the goal
heuristic search: best first search: A-star search

A* searchImplementation: The intended behavior can be
ensured by using an ordered queue in which nodes are inserted according to the function f(x) = g(x) + h(x)
defun A-STAR-SEARCH(problem) returns solution return TREE-SEARCH ( problem, ordered-queue )
heuristic search: best first search: A-star search

A* search: An example heuristic search: best first search: A-star search

A* search: An exampleheuristic search: best first search: A-star search

A* search: An exampleheuristic search: best first search: A-star search

A* search: An exampleheuristic search: best first search: A-star search

A* search: An exampleheuristic search: best first search: A-star search
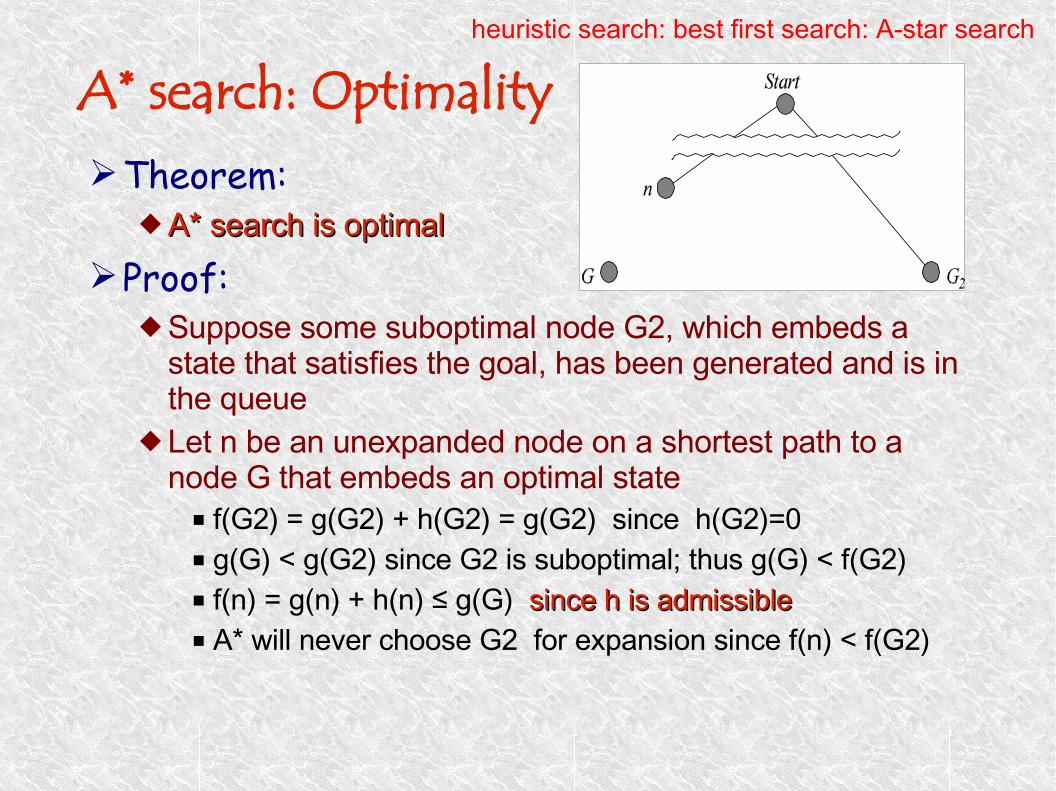
A* search: OptimalityTheorem:
A* search is optimalA* search is optimal
Proof: Suppose some suboptimal node G2, which embeds a
state that satisfies the goal, has been generated and is in the queue
Let n be an unexpanded node on a shortest path to a node G that embeds an optimal state■ f(G2) = g(G2) + h(G2) = g(G2) since h(G2)=0 ■ g(G) < g(G2) since G2 is suboptimal; thus g(G) < f(G2) ■ f(n) = g(n) + h(n) ≤ g(G) since h is admissiblesince h is admissible■ A* will never choose G2 for expansion since f(n) < f(G2)
heuristic search: best first search: A-star search

A* search: Optimality (another way)Lemma: A* expands nodes in increasing order of f value
It gradually adds “f-contours” of nodesContour k contains all nodes with f = fk with fk < fk+1
If C* is an optimal-path cost: ■ A* expands all nodes with f(n) < C*■ A* expands some nodes with f(n) = C*■ A* does not expand nodes with f(n) > C*
heuristic search: best first search: A-star search
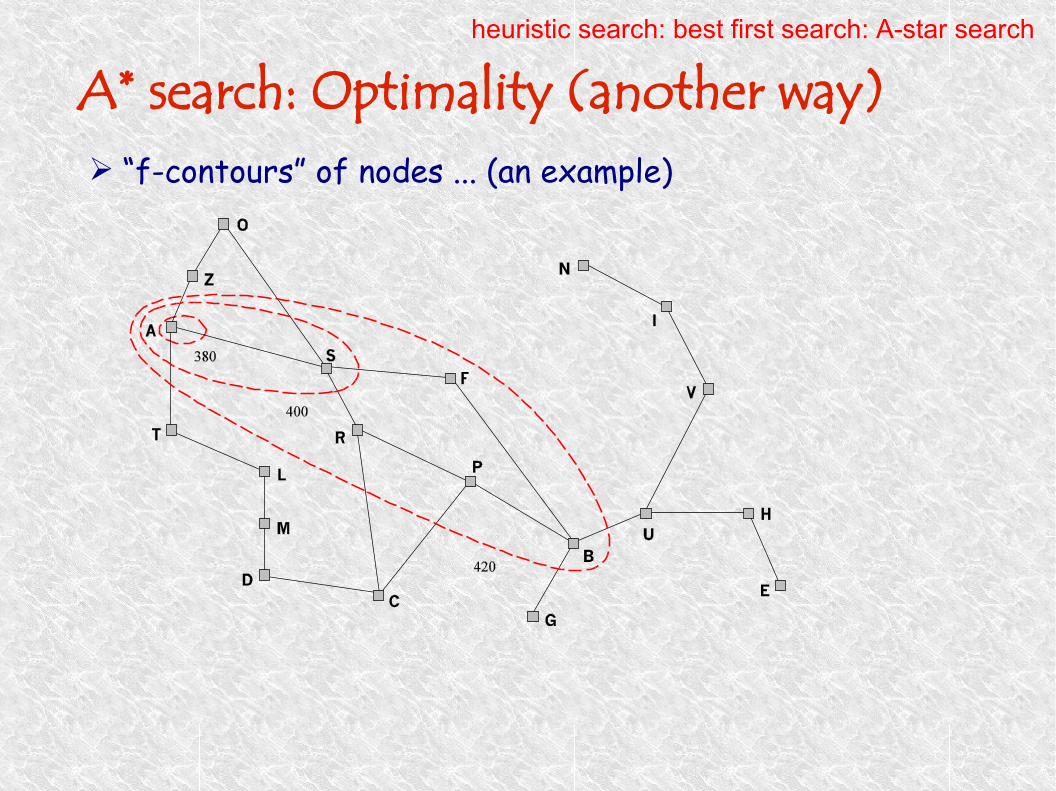
A* search: Optimality (another way) “f-contours” of nodes ... (an example)
heuristic search: best first search: A-star search

Proof of lemma: ConsistencyA heuristic h is consistent if
h(n) ≤ c(n,a,n') + h(n')
If h is consistent, then f(n') ≥ f(n) f(n') = g(n') + h(n') f(n') = g(n) + c(n,a,n') + h(n') ≥ g(n) + h(n) f(n') = g(n) + c(n,a,n') + h(n') ≥ f(n)
Hence, f(n) is non-decreasing along any path (cf. triangle inequality)
Let us assume that the function devised to evaluate the cost of a step (i.e STEP-COST) has a corresponding function c : node x action x node
heuristic search: best first search: A-star search

A* search: PropertiesCompleteness:
Yes, unless there is an infinite number of nodes with f ≤ f(G)
Time complexity:O(bd) --- d = depth of the closest optimal solutionA good heuristic (i.e. h(x) very close to h*(x)) can improve it
very much
Space complexity:O(bd) --- keeps all nodes in memory
Optimality:Yes --- it cannot expand fk+1 until fk is finished
heuristic search: best first search: A-star search

Best first searchBest first search - Greedy search - A* search - Dijkstra's algorithmMore on best first search - Dominance - Relaxed problemsIterative improvement - Hill climbing - Simulated annealing
heuristic search: best first search: Djikstra's algorithm
Dijkstra’a algorithmGiven a vertex v, what is the length of the
shortest path from v to every vertex v' in the graph?
A greedy algorithm: choose node that minimized distance from initial state (i,e, use g instead of h)
You must know the entire search space to use Dijkstra's algorithm
heuristic search: best first search: Djikstra's algorithm

A* vs. Dijkstra's AlgorithmDijkstra’s algorithm is a degenerate case of A*,
where h(n) = 0 - A* finds the best path to a particular v - A* will typically use less memory
heuristic search: best first search: Djikstra's algorithm

A* vs. Dijkstra's AlgorithmDijkstra's is like a puddle of water flooding
outwards on a flat floor, whereas A* is like the same puddle expanding on a bumpy and graded floor toward a drain (the target node) at the lowest point in the floor
heuristic search: best first search: Djikstra's algorithm

A* vs. Dijkstra's AlgorithmInstead of spreading out evenly
on all sides, the water seeks the path of least resistance, only trying new paths when something gets in its way
The heuristic function is what provides the “grade” of the hypothetical floor.
heuristic search: best first search: Djikstra's algorithm

Best first search - Greedy search - A* search - Dijkstra's algorithmMore on best first search - Dominance - Relaxed problemsIterative improvement - Hill climbing - Simulated annealing
More on best first searchheuristic search: best first search: more on ...
Admissible heuristics: DominanceIf h2(n) ≥ h1(n) for all n, and both are admissible,
then h2 dominates h1 and is better for searchingFor instance,
when d=14, typical search costs are:■ IDS = 3.473.941 nodes ■ A*(h1) = 539 nodes■ A*(h2) = 113 nodes
when d=24, typical search costs are:■ IDS approx 54.000.000.000 nodes■ A*(h1) = 39.135 nodes ■ A*(h2) = 1.641 nodes■ Relaxed problems
heuristic search: best first search: more on ...

Admissible heuristics (8-puzzle)Examples of admissible heuristics for the 8-
puzzle problem:h1(n) = number of misplaced tiles
h2(n) = total Manhattan distance (for all tiles, sum the number of squares from tile location to desired location)
heuristic search: best first search: more on ...
Admissible heuristics: RelaxationBest first search - Greedy search - A* search - Dijkstra's algorithmMore on best first search - Admissible heuristics - Relaxed problemsIterative improvement - Hill climbing - Simulated annealing
heuristic search: best first search: more on ...

Admissible heuristics: RelaxationOne way to obtain admissible heuristics is:
Simplify the problem by relaxing some of its constraintsFind an exact solution for the relaxed problem (easier than
the initial problem)Use the cost of the exact solution for the relaxed problem
as the heuristic value
Key: the optimal solution cost to the relaxed problem cannot be greater than that of the real problem
heuristic search: best first search: more on ...

Relaxed problems: 8-puzzleRelax 8-puzzle rules so that a tile can move to
any squareUnder this hypothesis, h1(n) (number of misplaced tiles)
gives the shortest solution
Relax 8-puzzle rules so that a tile can move to any adjacent square (even if it is full) Under this hypothesis, h2(n) (Manhattan distance) gives
the shortest solution
heuristic search: best first search: more on ...

More relaxed problems (TSP)Traveling Salesman Problem (TSPTSP) = find the
shortest tour that visits all cities exactly once
Relaxation: minimum spanning tree can be computed in O(n2) and it is a lower bound on shortest (open) tour
heuristic search: best first search: more on ...

More relaxed problems (n-Queens) n-Queensn-Queens = place n queens on an n x n board such
that no two queens are placed on the same row, column or diagonal
Strategy: start with any queen distribution on the board. Move a queen at a time to reduce number of conflicting pairs
heuristic search: best first search: more on ...

Iterative improvementBest first search - Greedy search - A* search - Dijkstra's algorithmMore on best first search - Dominance - Relaxed problemsIterative improvement - Hill climbing - Simulated annealing
heuristic search: iterative improvement

Iterative improvementIn many optimization problems the path to the
solution is irrelevant. The goal state itself is the solution (e.g. TSP and n-Queen problems)
All problems in which a configuration or schedule that meets some constraints must be found satisfy this description
In such kind of problems, the state space represents the set of complete configurations and iterative improvementiterative improvement of the solution can be adopted as a strategy to search for a solution
heuristic search: iterative improvement

Iterative improvementStrategy:
Keep a single “current” state and try to improve it “Repair” the solution until it meets all constraints
Space complexity:constant
heuristic search: iterative improvement

Iterative improvement (TSP)Start with any complete tour. Perform pairwise
exchangesThe sequence of steps does not matter. We want
the goal state (tour)
heuristic search: iterative improvement

Iterative improvement (n-Queens)Start with any queen distribution on the boardMove a queen at a time to reduce the number of
conflicting pairs
heuristic search: iterative improvement

Iterative improvement: Hill climbingBest first search - Greedy search - A* search - Dijkstra's algorithmMore on best first search - Dominance - Relaxed problemsIterative improvement - Hill climbing - Simulated annealing
heuristic search: iterative improvement
Gradient ascent/descent: hill-climbingdefun HILL-CLIMBING (problem) returns local-maximum current, neighbor: node current ← MAKE-NODE(INITIAL-STATE(problem)) loop do neighbor ← [a max-valued successor of current-node]
if VALUE(neighbor) ≤ VALUE(current) then return STATE(current) current ← neighbor
heuristic search: iterative improvement: hill climbing

Gradient ascent/descent: hill-climbingCan get stuck on local maxima, depending or
initial state
If space is continuous: problems choosing step size, slow convergence
States
Local maximum
Global maximumValue
heuristic search: iterative improvement: hill climbing

Simulated AnnealingBest first search - Greedy search - A* search - Dijkstra's algorithmMore on best first search - Dominance - Relaxed problemsIterative improvement - Hill climbing - Simulated annealing
heuristic search: iterative improvement: simulated annealing

Simulated annealingIdea: escape local maxima allowing some “bad”
moves, but gradually reducing their frequency and size
heuristic search: iterative improvement: simulated annealing

Simulated annealingSimilar to the annealing process in metalurgics:
drop temperature gradually allows crystalline structure reach a minimal energy state
If T decreases slowly enough, always reaches the best state
Widely used in VLSI design, flight scheduling, production scheduling, and other large optimization problems
heuristic search: iterative improvement: simulated annealing

Simulated annealingEach point s of the search space is compared to
a state of some physical system, and the function E(s) to be minimized is interpreted as the internal energy of the system in that state
The goal is to bring the system, from an arbitrary initial state, to a state with the minimum energy
heuristic search: iterative improvement: simulated annealing
Simulated annealingAt each step, the SA heuristic considers some
neighbours of the current state s, and probabilistically decides between moving the system to state s' or staying put in state s
The probabilities are chosen so that the system ultimately tends to move to states of lower energy
Typically this step is repeated until the system reaches a state which is good enough for the application, or until a given computation budget has been exhausted
heuristic search: iterative improvement: simulated annealing

Simulated annealingdefun SIM-ANNEALING(problem,schedule) returns goal-state current, next: node, T: Temperature current ← MAKE-NODE ( INITIAL-STATE(problem) ) k ← 1 loop do
T ← schedule[k] if T = 0 then return STATE(current)
next ← [a randomly selected successor of current] ∆ ← EVAL(next) – EVAL(current) if ∆ > 0 then current ← next --- only with probability e∆/T
else current ← next k ← k+1
TemperatureTemperature:controls the probability of downward steps (varies according to schedule)
heuristic search: iterative improvement: simulated annealing