prof. a. taleb-bendiab, talk: wrac’05, paper: mr et al, washington, date: 20/09/2005, page: 1 mind...
TRANSCRIPT

Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 1
Mind out of Mind out of Programmable Programmable
MatterMatter: : Exploring Unified Models of Exploring Unified Models of Emergent System AutonomyEmergent System Autonomy
Prof. A. Taleb-BendiabProf. A. Taleb-BendiabLiverpool John Moores UniversityLiverpool John Moores University
[email protected]@livjm.ac.uk, ,
www.cms.livjm.ac.uk/talebwww.cms.livjm.ac.uk/taleb, www.cms.livjm.ac.uk/, www.cms.livjm.ac.uk/22nrichnrich

Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 2
OutlineOutline
Radical Agent Concepts? orRadical Agent Concepts? or– Achieving DAI ambitionAchieving DAI ambition– Brief overviewBrief overview
How to get there?How to get there?– a unifying modela unifying model
What’s our focus What’s our focus – Autonomic systems engineering Autonomic systems engineering
ConclusionsConclusions
Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 3
The State of AI Research The State of AI Research
– – Marvin Minsky (circa 2003)Marvin Minsky (circa 2003)“… “… Unfortunately, the strategies most popular among Unfortunately, the strategies most popular among AI researchers in the 1980s have come to a dead AI researchers in the 1980s have come to a dead end, Minsky said. So-called "expert systems," which end, Minsky said. So-called "expert systems," which emulated human expertise within tightly defined emulated human expertise within tightly defined subject areas like law and medicine, could match subject areas like law and medicine, could match users' queries to relevant diagnoses, papers and users' queries to relevant diagnoses, papers and abstracts, yet they could not learn concepts that abstracts, yet they could not learn concepts that most children know by the time they are 3 years old.” most children know by the time they are 3 years old.” http://www.wired.com/news/technology/0,1282,58714,00.htmlhttp://www.wired.com/news/technology/0,1282,58714,00.html
-- Though – Stuart Russell said -- Though – Stuart Russell said “… “… researchers who study learning, vision, robotics researchers who study learning, vision, robotics and reasoning have made tremendous progress.” and reasoning have made tremendous progress.”
-- Tom Mitchell-- Tom Mitchell“…“…The question is, what is the best research strategy The question is, what is the best research strategy to get (us) from where we are today to an integrated, to get (us) from where we are today to an integrated, autonomous intelligent agent?"autonomous intelligent agent?"
Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 4
The ProblemsThe Problems Accumulating Common SenseAccumulating Common Sense
– Propositional Account of KnowledgePropositional Account of Knowledge– Acquiring KnowledgeAcquiring Knowledge
What is the best method for representing knowledge What is the best method for representing knowledge and common sense?and common sense?
How can reasoning and analysis of knowledge be How can reasoning and analysis of knowledge be achieved?achieved?
How can differing approaches be integrated into an How can differing approaches be integrated into an overall model?overall model?
Reasoning on PropositionsReasoning on Propositions– Agent modelAgent model– Representational FormalismRepresentational Formalism
Diverse Conflicting ApproachesDiverse Conflicting Approaches– No unifying modelNo unifying model
Programming, control and/or InteractionProgramming, control and/or Interaction

Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 5
Reasoning SystemsReasoning Systems Agent ModelsAgent Models
– BDI, BOID etc..BDI, BOID etc.. Specified by differing formalisms.Specified by differing formalisms. Application/Domain specific.Application/Domain specific. Little support for multi-agent cooperative systems, Little support for multi-agent cooperative systems,
swarms, self-organisation, etc.swarms, self-organisation, etc. Representational FormalismRepresentational Formalism
– A huge variety of formalisms are availableA huge variety of formalisms are available Process algebras, Logical calculi, etc.Process algebras, Logical calculi, etc.
Conflicting Approaches to ModellingConflicting Approaches to Modelling– Top down, CentralisedTop down, Centralised
System ControllerSystem Controller Policy and/or norm-based systemsPolicy and/or norm-based systems
– Bottom up, distributed controlBottom up, distributed control Swarming SystemsSwarming Systems Self-organisationSelf-organisation

Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 6
Radical Rethinking? #1Radical Rethinking? #1 mechanisms mechanisms
– knowledge, deliberation, action and knowledge, deliberation, action and control interact to form intelligent control interact to form intelligent autonomous agents, be they autonomous agents, be they deliberative, intentional or deliberative, intentional or purely reactive particles/actors. purely reactive particles/actors.
– Via logical formal modelling techniquesVia logical formal modelling techniques a unified model combining “2a unified model combining “2ndnd order” multi- order” multi-
agencyagency– Meta-layering Meta-layering
Systems of systemsSystems of systems Observer model for adjustable self-regulationObserver model for adjustable self-regulation

Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 7
Our Approach #1Our Approach #1 How do we do it?How do we do it?
– Formal semantics of model-based and Formal semantics of model-based and emergent regulatory structure of emergent regulatory structure of autonomic self-regenerative systems. autonomic self-regenerative systems.
– A (stochastic) situation calculus for A (stochastic) situation calculus for unifying formalism to spec. unifying formalism to spec.
collective and individual behaviour with collective and individual behaviour with coordination model (see vertical vs horizontal coordination model (see vertical vs horizontal layers).layers).
Observer component monitors behaviour:Observer component monitors behaviour: Top down model for observerTop down model for observer Bottom up model for system agentsBottom up model for system agents
Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 8
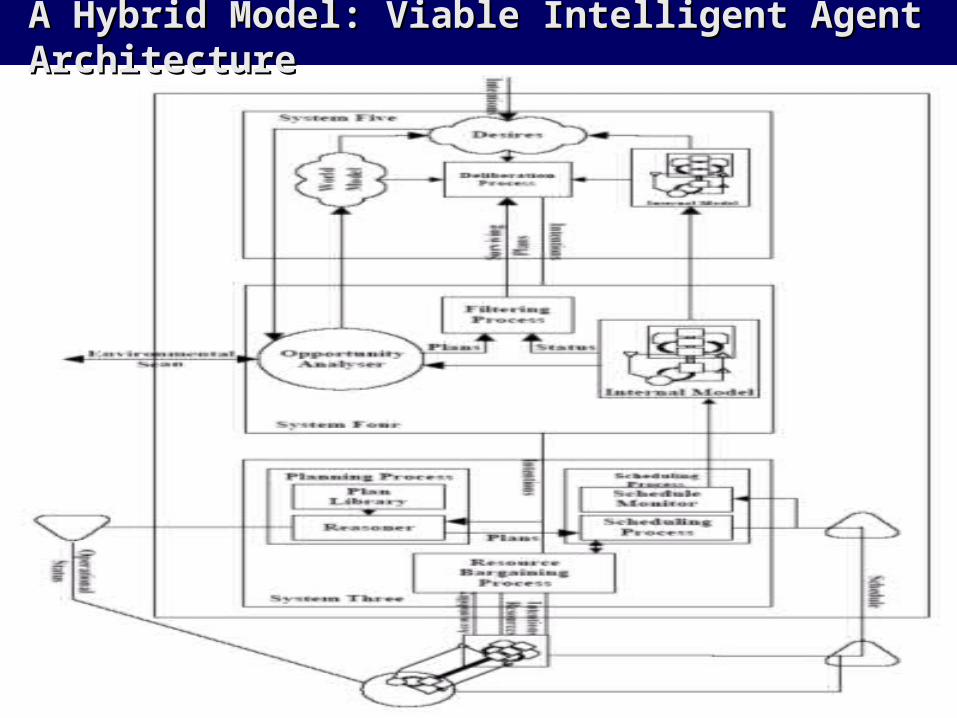
A Hybrid Model: Viable Intelligent Agent A Hybrid Model: Viable Intelligent Agent ArchitectureArchitecture

Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 9
An Adjustable DeliberationAn Adjustable Deliberation Deliberative frameworks:Deliberative frameworks:
– Beliefs-Desires-Intentions (BDI) Bratman Beliefs-Desires-Intentions (BDI) Bratman et et al.al. Beliefs: representing the current state of Beliefs: representing the current state of
its world its world desires representing the agent’s ideal desires representing the agent’s ideal
world. world. – Mismatch, between B & D triggers the Mismatch, between B & D triggers the
intentions to rectify the current state to intentions to rectify the current state to the ideal state.the ideal state.
To include normative To include normative behaviourbehaviour and thus and thus cooperation and coordination in multi-agent cooperation and coordination in multi-agent systemssystems– Belief-Obligation-Intention-Desire model Belief-Obligation-Intention-Desire model
(BOID)(BOID)– Epistemic-Deontic-Axiologic (EDA) modelEpistemic-Deontic-Axiologic (EDA) model– Extended BDIExtended BDI
Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 10
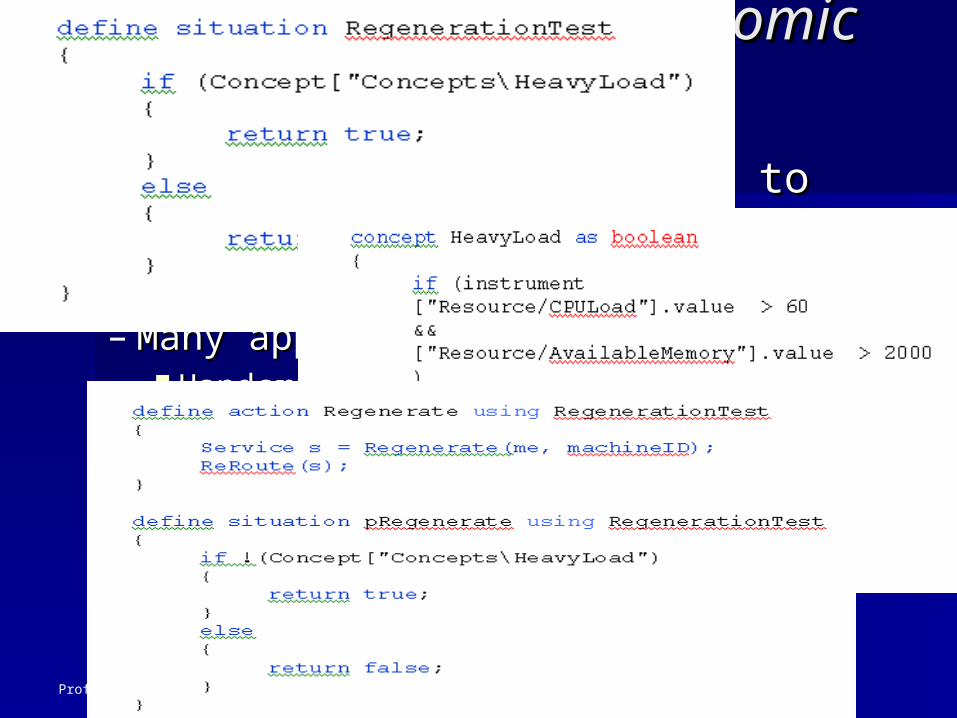
Enacting Adjustable Enacting Adjustable Autonomic Models #1Autonomic Models #1 We are concerned with how to enact We are concerned with how to enact
SC formulation and its deploymentSC formulation and its deployment– Many approaches including Many approaches including
Handcrafted code, automated code gen., etc.Handcrafted code, automated code gen., etc.
– We are developing a declarative meta-We are developing a declarative meta-language –JBel based on C#language –JBel based on C#

Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 11
Example: Grid-Based Decision Example: Grid-Based Decision SystemsSystems

Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 12
Work in Progress #1Work in Progress #1 A Logical Treatment of Control Emergence in A Logical Treatment of Control Emergence in
Complex Self-Organising SystemsComplex Self-Organising Systems– Case-study: Swarm Architecture (see Case-study: Swarm Architecture (see ANTS)ANTS)
Defined a set of imperatives eg:Defined a set of imperatives eg: Imperative IImperative I
– When a When a worker (w) worker (w) is registered on the is registered on the mission, by registering with the mission, by registering with the RulerRuler team team (T), and has not entered any failure state (T), and has not entered any failure state leading to its “death”, the leading to its “death”, the RulersRulers possess a possess a team commitment to connect with the team commitment to connect with the workerworker, should it ever be disconnected., should it ever be disconnected.
Imperative 2Imperative 2– The ruler team must have be made up of at The ruler team must have be made up of at
least a specified number of ruler unitsleast a specified number of ruler units
Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 13
Work in Progress #2Work in Progress #2 A number of logically provable A number of logically provable
consequences emerge as a result of consequences emerge as a result of imperative Iimperative I. eg:. eg:
When a worker registers or unregisters with When a worker registers or unregisters with a ruler the ruler has a commitment to make a ruler the ruler has a commitment to make this fact common knowledge (mutually this fact common knowledge (mutually believed) by the ruler team.believed) by the ruler team.
If a ruler individually comes to believe that a If a ruler individually comes to believe that a registered worker is not connected then it registered worker is not connected then it has a commitment to make this common has a commitment to make this common knowledge.knowledge.
Etc.Etc.
Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 14
Conclusions and Further Conclusions and Further worksworks
EmergenceEmergence– Logical ConsequencesLogical Consequences
Minimal rule setMinimal rule set– Evolutionary MonitoringEvolutionary Monitoring
Arises from incompleteness of logicArises from incompleteness of logic Many techniques may be used to assess Many techniques may be used to assess
new behaviournew behaviour Software LearningSoftware Learning
– Knowledge, common sense, experienceKnowledge, common sense, experience bounded Autonomy and governancebounded Autonomy and governance

Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 15
AcknowledgementsAcknowledgements Acknowledgements
– The researchers and staff: Martin Randles, Phil Miseldine, Andy Laws,
etc. www.cms.livjm.ac.uk/2nrich www.cms.livjm.ac.uk/cloud www.cms.livjm.ac.uk/taleb
– Sponsors and Partners EPSRC Christies and Linda McCartney NHS trusts

Prof. A. Taleb-Bendiab, Talk: WRAC’05, Paper: MR et al, Washington, Date: 20/09/2005, Page: 16
That’s the end – so I’m off !