r5000 radar system manual de usuario
TRANSCRIPT

ESPAÑOL
R5000 Radar systemManual de Usuario
www.navico-commercial.com


Prólogo
Exención de responsabilidadDado que Navico mejora continuamente este producto, nos reservamos el derecho derealizar cambios al producto en cualquier momento. Dichos cambios pueden no aparecerrecogidos en esta versión del manual. Póngase en contacto con su distribuidor más cercanosi necesita más ayuda.
Es responsabilidad exclusiva del propietario instalar y usar el equipo de manera que no causeaccidentes ni daños personales o a la propiedad. El usuario de este producto es el únicoresponsable de seguir las medidas de seguridad marítimas.
NAVICO HOLDING AS Y SUS FILIALES, SUCURSALES Y AFILIADOS RECHAZAN TODARESPONSABILIDAD DERIVADA DEL USO DE CUALQUIER TIPO DE ESTE PRODUCTO QUEPUEDA CAUSAR ACCIDENTES, DAÑOS O QUE PUEDA QUEBRANTAR LA LEY.
Este manual representa el producto tal y como era en el momento de la impresión. NavicoHolding AS y sus filiales, sucursales y afiliados se reservan el derecho de modificar sin previoaviso las características técnicas.
Idioma principalEste informe, cualquier manual de instrucciones, guías de usuario y otra informaciónrelacionada con el producto (Documentación) puede ser traducida a, o ha sido traducida de,otro idioma (Traducción). En caso de conflicto entre cualquier traducción de laDocumentación, la versión en lengua inglesa constituirá la versión oficial de la misma.
CopyrightCopyright © 2021 Navico Holding AS.
Marcas registradas®Registrado en la oficina de patentes, marcas registradas y marcas comerciales (™) de EE. UU.de conformidad con el derecho consuetudinario estadounidense. Visite www.navico.com/intellectual-property para revisar los derechos y las acreditaciones globales de la marcaregistrada de Navico Holding AS y otras entidades.
• Navico® es una marca comercial registrada de Navico Holding AS.• SIMRAD® es una marca comercial registrada de Kongberg Maritime AS, bajo licencia para
Navico Holding AS.
GarantíaLa tarjeta de garantía se suministra como un documento aparte. En caso de cualquier duda,consulte el sitio web de la marca de su unidad o sistema:
www.navico-commercial.com
Declaración de conformidadNavico declara bajo su única responsabilidad que el producto cumple con los requisitos de:
• Directiva 2014/90/UE del Consejo Europeo sobre equipos marinos modificada por elReglamento de aplicación (UE) 2020/1170 (16 de julio de 2020) de la Comisión:Wheelmark
La declaración de conformidad correspondiente está disponible en la sección del productodel siguiente sitio web:
• www.navico-commercial.com
Sobre este manual
Público objetivoEste manual se redactó para operadores del sistema.
El manual presupone que el lector tiene un conocimiento básico acerca este tipo de equipos en cuanto se refiere a:
Prólogo | R5000 Manual de Usuario 3

• funcionamiento• terminología y prácticas náuticas
Convenciones de texto importantesEl texto importante que requiere una atención especial del lector está resaltado del siguientemodo:
Ú Nota: Usado para atraer la atención del lector a un comentario o informaciónimportante.
Advertencia: Usado cuando es necesario advertir al personal de que debeactuar con cuidado para evitar lesiones y/o daños a equipos o al personal.
Versión de softwarePuede ver la versión del software instalado en la unidad en el cuadro de diálogo Acerca de:
El manual se actualizará continuamente para adaptarse a nuevas versiones de software. La última versión disponible del manual puede descargarse desde el sitio web, en:
www.navico-commercial.com
Registro de cambios (Español)
Referencia Fecha y descripción
988-12377-0012018-Sep-19
Primera versión.
988-12377-00225 de julio de 2021
Actualización de cumplimiento e incorporación de descripción de LWE.
4 Prólogo | R5000 Manual de Usuario

Precauciones de seguridadLas precauciones de seguridad descritas en esta sección son aplicables al sistema de radar. Setrata de precauciones de seguridad generales que no están relacionadas con ningúnprocedimiento específico, por lo que es posible que no aparecerán en otras secciones deeste manual. Son precauciones recomendadas que el personal debe comprender y aplicardurante el funcionamiento y el mantenimiento del sistema.
Está obligado a leer estas instrucciones de funcionamiento antes del uso, y a cumplir con lasinstrucciones de funcionamiento para evitar posibles peligros. La prevención de peligrosincluye la formación y autorización del personal que va a utilizar el producto para el uso delequipo de forma segura. No asumimos ninguna responsabilidad por daños debidos a unfuncionamiento inadecuado y que podrían haberse evitado.
El sistema sólo debe ser manejado por personas que hayan superado la correspondienteformación obligatoria de los respectivos sistemas y aplicaciones. La lectura de estasinstrucciones de funcionamiento no sustituye a dicha formación. Las personas autorizadaspara manejar, mantener y solucionar los problemas del sistema reciben formación einstrucción de Simrad. Las personas que utilicen o realicen el mantenimiento de este sistemade radar deben estar familiarizadas con las normas de seguridad generales y los sistemas deseguridad específicos, y deben haber superado toda la formación necesaria. Se deben haberleído las instrucciones de funcionamiento y los manuales pertinentes antes de empezar atrabajar.
Tenga estas instrucciones de funcionamiento siempre a mano en todas las ubicacionespertinentes, y asegúrese de que hay copias disponibles para todos los operadores. Elpersonal operativo debe seguir en todo momento todas las normativas de seguridad.
Durante el funcionamiento normal, la unidad se puede desconectar rápidamente de laalimentación apagando el interruptor pertinente situado en la centralita eléctrica.
No sustituya los componentes ni realice ajustes en el interior de la unidad cuando elsuministro de tensión está activo. Desconecte siempre la alimentación y descargue a tierraun circuito antes de tocarlo. Bajo ninguna circunstancia debe reparar o iniciar elmantenimiento de la unidad una persona sin la presencia de una persona cualificada.
Garantice el acceso libre a todos los paneles de operador, controles y cuadros eléctricoscorrespondientes para permitir una respuesta inmediata a las alarmas.
Siempre que sea necesario desconectar la guía de ondas de un transmisor de radar parallevar a cabo el mantenimiento, la salida del transmisor debería terminar con una cargaadaptada. Si esto no fuera posible, se debe prestar especial atención. No se ponga de piefrente a una guía de ondas con el extremo abierto que irradie energía.
Ú Nota: La alimentación está siempre presente en la placa de terminales a menos que elpanel principal de la distribución de alimentación eléctrica de la embarcación estédesactivado.
Advertencia: Jamás mire hacia abajo en una guía de ondas que irradieenergía.
Advertencias
Alta tensiónEl equipo de radar incluye alta tensión que puede provocar lesiones e incluso la muerte. El peligro sólo existe cuando las unidades están abiertas, exponiendo los circuitos internos, como cuando se realiza el servicio de mantenimiento del equipo.
Este radar se ha diseñado cuidadosamente para proteger al personal de posibles lesiones producidas por la alta tensión. Aunque se ha realizado un gran esfuerzo para eliminar el peligro para el personal, no se acepta ninguna responsabilidad por cualquier daño o muerte sufridos en relación con este equipo.
Prólogo | R5000 Manual de Usuario 5

Radiación de radiofrecuenciaLa exposición de cualquier parte del cuerpo humano a alta radiación de radiofrecuenciapuede tener efectos perjudiciales (especialmente, los ojos).
Sin embargo, el sistema está diseñado para desactivar la radiación de microondas siempreque la antena no esté girando.
Distancias de peligro
Configuración Distancia de100 W/m2 al punto(m)
Distancia de50 W/m2 al punto(m)
Distancia de10 W/m2 al punto(m)
Transceptor de12 KWAntena de banda Xde 1,8 m (6')
- 0,15 0,6
Transceptor de12 KWAntena de banda Xde 2,7 m (9')
- - 0.5
Transceptor de12 KWAntena de banda Xde 3,6 m (12')
- - 0,35
Transceptor de25 KWAntena de banda Xde 1,8 m (6')
0.1 0.2 1,3
Transceptor de25 KWAntena de banda Xde 2,7 m (9')
- 0.1 1,0
Transceptor de25 KWAntena de banda Xde 3,6 m (12')
- 0,05 0,9
Transceptor de30 KWAntena de banda Sde 3,6 m (12')
- - 0,4
Radiación de rayos XEste sistema de radar no genera radiación de rayos X.
6 Prólogo | R5000 Manual de Usuario

Contenido
10 Introducción10 Descripción general del sistema R500010 Manuales de R5000
12 Funcionamiento del sistema12 Teclas del ratón trackball O500013 Controles frontales del O200014 Teclas del monitor M5000
15 Interfaz del usuario15 Panel principal16 Símbolos PPI16 Indicador de congelación de imagen16 Botones de acceso rápido17 Menú principal y submenús17 Cuadro de diálogo Ajustes17 Símbolo de la propia embarcación18 Ajustes de las unidades de medida18 Paletas de vídeo del radar18 Teclado en pantalla
20 Funcionamiento básico20 Encendido y apagado del sistema20 Ajuste del brillo de la pantalla20 Selección de fuente de radar20 Cambio del sensor entre modo de transmisión y standby20 Ajuste del rango de radar21 Uso del cursor22 Selección de fuente de velocidad23 Seguimiento de blancos24 Reconocimiento de alertas24 Aplicación de los ajustes de control por defecto24 Captura de pantalla
25 La función Interswitch25 Descripción25 Estación de control maestro por defecto25 Modos de la estación de control26 Cambio de un modo de control27 Indicación del estado de control
28 Ajuste de la imagen de radar28 Calibración de los ajustes automáticos28 Ganancia28 Sea clutter (filtro anti ruido del mar)29 Filtro anti lluvia30 Ajuste del sensor de radar
31 Opciones de vista de radar31 Estelas de blanco y posición pasada31 Orientación del radar32 Modo de movimiento de radar32 Compensación del centro del PPI33 Vectores33 Rumbos del cursor33 Configuración del brillo de los elementos del panel34 Gráfico de la embarcación propia
Contenido | R5000 Manual de Usuario 7

35 Blancos35 Menú de blancos35 Panel de blancos35 Selección y anulación de selección de blancos36 Definición de barcos peligrosos36 Blancos de radar39 Radar SART41 RACON41 Blancos AIS44 Asociación de blancos AIS y de radar44 Visualización de información de blanco45 Simulador de formación
47 Herramientas de navegación47 Zonas de seguimiento48 Líneas paralelas de indexación50 Marcadores EBL/VRM51 Medición de distancia y rumbo
54 Mapas54 Cuadro de diálogo de mapas54 Referencias del mapa55 Colores y símbolos del mapa55 Creación de un nuevo mapa56 Guardado de un mapa56 Modificación de un mapa57 Exportación de mapas57 Importación de mapas
59 Personalización de los ajustes de control de radar59 Personalización de la tabla de ajustes de control de radar
61 Opciones avanzadas61 Rechazo de interferencias de radar61 Rechazo de ruido61 Opción Resaltar Blancos61 Expansión de blancos61 Escaneo rápido
62 Maniobra de prueba62 Simbología de maniobras de prueba63 Inicio y detención de la maniobra de prueba63 Cambio manual de los ajustes de la maniobra de prueba
64 Mantenimiento64 General64 Monitor de rendimiento65 Datos del radar
66 El sistema de alertas66 Tipo de alarmas66 Categorías de alerta66 Notificaciones de alerta69 Cuadro de diálogo Alertas69 Sistemas de alerta de puente externos70 Listado alfabético de alertas71 Modos de funcionamiento provisional
8 Contenido | R5000 Manual de Usuario

73 Descripción general de menús73 Menú Principal74 Menú de ajustes
76 Controlador O2000/Trackball O5000, comparación de funciones de teclas
77 Símbolos de blancos
80 Términos y abreviaturas
85 Especificaciones técnicas85 General85 Rendimiento86 Características de la pantalla87 Seguimiento de blancos87 AIS87 Compatibilidad
Contenido | R5000 Manual de Usuario 9

Introducción
Descripción general del sistema R5000Un sistema de radar R5000 básico tiene las siguientes partes principales:
• Sensor de radar SRT LAN (A), que incluye:- Antena- Transceptor SRT LAN up-mast o down-mast- Unidad de fuente de alimentación R5000
• estación de control de radar R5000 (B), que incluye:- Monitor M5000- Unidad de control O2000- Unidad de trackball O5000- Procesador de radar R5000
A A
B B
1
10
El sistema R5000 se puede instalar como sistema de radar independiente o en modo de instalación avanzada con varios sensores y estaciones de control.
En una instalación avanzada, cada sensor de radar tiene una estación de control conectada directamente a él. Esta estación de control será el controlador maestro predeterminado del sensor de radar. Los procesadores de radar R5000 se pueden conectar con un cable LAN interswitch. Esto permite compartir el control del radar de los sensores de radar entre varias estaciones de control. Durante la puesta en marcha del sistema, la función del interswitch se configura para gestionar el control de los sensores de radar. Para obtener más información, consulte "La función Interswitch" en la página 25.
Manuales de R5000La siguiente documentación se encuentra disponible para los sistemas de radar R5000:
Manual del operador del R5000Explicaciones para el usuario de la unidad de control del radar y de las características incluidas en el sistema.
Público objetivo: operadores del sistema.
Introducción | R5000 Manual de Usuario

Guía rápida de R5000Documento gráfico que describe las teclas y las funciones principales.
Público objetivo: operadores del sistema.
Manual de instalación del sistema R5000Instalación mecánica y cableado, especificaciones técnicas y planos mecánicos de todos loscomponentes del sistema.
Público objetivo: personal encargado de la instalación del astillero.
Manual de configuración del R5000Configuración/ajuste y puesta en marcha del sistema.
Público objetivo: técnicos de instalación y mantenimiento.
Introducción | R5000 Manual de Usuario 11

Funcionamiento del sistemaEl sistema se maneja con la unidad de control remoto (O2000) y con el ratón (unidadtrackball O5000).
El control remoto se utiliza para manejar los menús y para un uso sencillo de los botones deacceso rápido.
El ratón se utiliza principalmente para gestionar los blancos y en situaciones en las que esnecesario colocar el cursor de forma precisa en el PPI.
Para ver una descripción completa del control remoto y las teclas de ratón, consulte"Controlador O2000/Trackball O5000, comparación de funciones de teclas" en la página 76.
Teclas del ratón trackball O5000
La bola de desplazamiento óptica (A) se utiliza para situar el cursor. El resto de teclas deltrackball tienen diferentes funciones, dependiendo de la posición del cursor en el panel delradar.
En la siguiente tabla, se enumeran las funciones de tecla con relación a la sección del panelde radar que se encuentra debajo del cursor.
Ú Nota: El cursor debe estar colocado sobre un menú abierto o sobre el cuadroemergente de acceso rápido para poder utilizar la función de desplazamiento.
Cursor sobre... Botón izquierdo(B)
Botón derecho (C) Rueda dedesplazamiento(D)
Menú SelecciónVolver al nivel delmenú anterior
• Girar paradesplazarse por lasopciones del menú
• Pulsar paraseleccionar
Botón de accesorápido
SelecciónMostrar la ventanaemergente del botónseleccionado
• Girar paradesplazarse por lasopciones de laventanaemergente
Blancos AIS Activar/desactivar Mostrar el menú deblancos
Ninguna acciónBlanco de radar Adquirir blanco
2
12 Funcionamiento del sistema | R5000 Manual de Usuario

Controles frontales del O2000
Ú Nota: O2000 puede usarse con equipos diferentes. Como se indica a continuación,algunas de las teclas no son aplicables a R5000.
A Tecla Mark/MOB No se usa en R5000
B Indicadores LED de control de la unidad. No se usa en R5000
C Tecla Display Se utiliza para la configuración de O2000. No se utiliza parafuncionamiento de R5000
D Tecla EBL/VRM. Púlsela una vez para activar/desactivar los marcadores EBL/VRM.Púlsela dos veces para mostrar la ventana emergente EBL/VRM. Manténgalapulsada para alternar entre EBL/VRM 1 y EBL/VRM 2.
E Tecla Trails Púlsela para activar/desactivar tracks.
F Tecla de escala Pulse el indicador + o - para aumentar o reducir la escala del radar.
G Tecla Offset Púlsela una vez para mostrar el menú Offset.
H Tecla Enter Sin el cursor en PPI: no tiene ninguna función. Con el cursor en PPI:púlsela para activar/desactivar AIS, manténgala pulsada para mostrar el menú deblancos.Funcionamiento en menú: pulse para seleccionar una opción
I Botón giratorio. Sin ningún menú activado: el funcionamiento varía según el modooperativo.Funcionamiento en menú: gírelo para desplazarse por los elementos de menú ypara ajustar los valores; púlselo para seleccionar o guardar configuraciones
J Tecla Exit (Salir) Sin menú activo: despeja el cursor de PPI. Funcionamiento enmenú: púlsela para volver al nivel de menú anterior o para salir de un cuadro dediálogo.
K Teclas de dirección. Sin ningún menú activado: púlselas para mover el cursor en elPPI del radar.Funcionamiento en menú: púlselas para desplazarse por los elementos de menú yajustar un valor
L Tecla View Púlsela una vez para mostrar el menú View (Ver).
M Tecla MENU. Púlsela una vez para acceder al menú principal.
N Teclas Gain, Sea y Rain Púlselas para ajustar la sensibilidad del radar.
O Tecla Acknowledge Púlsela una vez para confirmar la alarma o el aviso más recienteen el panel Alerts (Alertas). Pulse la tecla de nuevo para confirmar la siguientealarma o advertencia. Manténgala pulsada para centrar la atención en el panelAlerts (Alertas) sin confirmar la alarma más reciente
P Tecla AIS. Púlsela para activar/desactivar la información AIS en pantalla. Manténgalapulsada para mostrar el cuadro de diálogo Vessels (Embarcaciones).
Funcionamiento del sistema | R5000 Manual de Usuario 13

Q Tecla Standby/Brilliance Púlsela una vez para mostrar la ventana emergenteStandby/Brightness (En espera/Brillo). Púlsela dos veces para alternar entre Standby(En espera) y Transmit (Transmitir). Manténgala pulsada para encender/apagar elsistema de radar.
R Tecla de modo No se usa en R5000
S Teclado alfanumérico. Se usa para escribir texto o números en los cuadros dediálogo. Sin un menú activo: pulse una tecla para modificar la escala como semuestra a continuación:
1 2 3 4 5 6 7 8 9 0
NM 1/8 1/4 1/2 3/4 1,5 3 6 12 24 48
Teclas del monitor M5000El monitor se configura y maneja con la fila de botones sensibles al tacto ubicados en elborde inferior del marco del monitor. Todos los botones disponen de retroiluminación (soloel botón de encendido permanece iluminado cuando se apaga el monitor).
A Tecla de encendido• Con el menú OSD (visualización en pantalla) activo: pulse para regresar al nivel
de menú anterior• Sin el menú OSD activado: ninguna acción
B Tecla de ajuste del brillo• Pulse el signo más o menos para reducir o aumentar el brillo (sin visualización
en pantalla del nivel de brillo)• Simultáneamente, mantenga pulsadas ambas teclas para restablecer el nivel de
brillo en el valor predeterminado. El valor predeterminado se establece en elmenú OSD
• Con el menú OSD activo: pulse el signo más o menos para mover el punto focalhacia arriba/abajo en el menú
C Tecla ENTER• Con el menú OSD activo: pulse para confirmar una selección• Sin el menú OSD activado: ninguna acción
D LED rojo• Fijo: modo de espera o sin fuente de vídeo• Intermitente: monitor inicializando o actualizando
E Tecla MENU• Manténgala pulsada para activar el menú OSD
Para obtener más información, consulte la documentación del monitor, que está disponiblepor separado.
14 Funcionamiento del sistema | R5000 Manual de Usuario

Interfaz del usuario
Panel principalEl panel principal está dividido en áreas predefinidas, tal como se muestra en la figurasiguiente.
A Indicador de plan de posición (PPI)Área de vídeo radar donde se realizan todas las opciones de navegación yseguimiento.
B Información de la embarcación propiaIndicador del modo de estabilización, indicador de congelación de imagen eindicadores que muestran los sensores primarios y secundarios.
C Panel blancoInformación detallada sobre objetivos blancos AIS y seleccionados.
D Botones de acceso rápidoBotones especiales para la función principal.
E Indicadores de blancoDescripción general de los ajustes del indicador de blancos.
F MarcadoresDetalles de los marcadores VRM y EBL activos.
G Información del cursorEscala y rumbo de la embarcación a la posición del cursor. También incluyeinformación sobre la posición si hay disponible una fuente de posición.
H Panel AlarmasLista de todas las alarmas activas.
I Indicadores de señalIndicadores del procesamiento de señales e indicadores de funciones de radar.
J Información del sistemaDetalles de escala, modo y pulso.
3
Interfaz del usuario | R5000 Manual de Usuario 15

Símbolos PPILos anillos de escala y los símbolos de línea de rumbo se pueden activar y desactivarindividualmente.
Para conocer más sobre mapas y líneas paralelas de indexación, consulte "Líneas paralelas deindexación" en la página 48 y "Mapas" en la página 54.
La opción de menú Overlay graphic off (apagar gráficos superpuestos) apaga todos losgráficos superpuestos sobre el PPI del radar, mostrando solo la señal de vídeo.
Ú Nota: Las opciones de menú de línea de rumbo y apagado de gráficos superpuestos sonmonoestables. Esto significa que debe mantener pulsada la tecla Intro o la tecla deflecha derecha para eliminar temporalmente los correspondientes símbolos del panel.Los gráficos son invisibles siempre que se mantenga pulsada la tecla, y se activarán denuevo cuando se suelte la tecla.
Indicador de congelación de imagen
La imagen incluye un indicador de congelación de imagen (A). El pequeño punto parpadeaa intervalos de 1 segundo para mostrar que la pantalla está activa y que la información de lossensores está actualizada.
Si la imagen se congela, la unidad debe reiniciarse.
Botones de acceso rápidoLos botones de acceso rápido se activan con las teclas correspondientes del controlador, ousando el ratón para seleccionar el botón.
Hay más detalles disponibles sobre los botones de acceso rápido en las seccionesindependientes que describen las funciones más adelante en este manual.
Cuadros emergentes de acceso rápidoAlgunos de los botones de acceso rápido tienen funciones adicionales, que se presentan enun cuadro emergente.
Para mostrar el cuadro emergente:
• Pulse dos veces en la tecla correspondiente del controlador• Pulse la tecla derecha del ratón cuando el cursor esté sobre un botón de acceso rápido
seleccionado
Para quitar el cuadro emergente y volver a la función principal del botón:
• Pulse la tecla Salir en O2000• Pulse la tecla izquierda del ratón cuando el cursor se encuentre fuera del cuadro
emergente• Pulse la tecla derecha del ratón cuando el cursor se encuentre sobre el cuadro emergente
16 Interfaz del usuario | R5000 Manual de Usuario

Menú principal y submenúsPuede acceder al menú principal pulsando la tecla Menú o seleccionando el botón asociadoal menú acceso rápido.
Para manejar el menú con O2000:
• Pulse las teclas de flecha arriba y abajo o gire el mando giratorio para desplazarse haciaarriba y hacia abajo en un menú
• Pulse la tecla Intro, la tecla de flecha derecha o el botón giratorio para acceder a unsubmenú, para cambiar entre las opciones y para confirmar la selección
• Pulse la tecla Salir o la tecla de flecha izquierda para volver al nivel de menú anterior y, acontinuación, salir del sistema de menús
Algunas de las opciones muestran un control de desplazamiento. Gire el botón giratorio opulse las teclas de flecha arriba/abajo para ajustar el valor.
Para utilizar el ratón trackball para manejar el menú:
• Utilice la rueda de desplazamiento para desplazarse hacia arriba y hacia abajo en un menú• Utilice la tecla izquierda para acceder a un submenú, para cambiar entre las opciones y
para confirmar la selección• Utilice la tecla derecha para volver al nivel de menú anterior y, a continuación, salir del
sistema de menús.
Ú Nota: El cursor debe estar colocado sobre el menú para manejar el sistema de menús.
Cuadro de diálogo AjustesLa configuración del software se realiza desde el cuadro de diálogo Ajustes.
Símbolo de la propia embarcaciónEn escalas de gran alcance, la indicación de la posición de la antena, el CCRP y la propiaembarcación son iguales y se indican como un símbolo minimizado de la embarcación.
Interfaz del usuario | R5000 Manual de Usuario 17

En escalas de poco alcance, se indica el tamaño real de la embarcación (definido en lacalibración del sistema de radar). Si la posición de la antena se desvía del CCRP, se mostraráen la imagen.
Símbolo de la embarcación en escala de gran alcance Símbolo de la embarcación en escala de poco alcance
Ajustes de las unidades de medida
De forma predeterminada, la velocidad se muestra en nudos (kn), y las medidas de largoalcance en millas náuticas (nm). Estos ajustes no se pueden cambiar.
Para distancias por debajo de 0,125 NM, puede seleccionar que las distancias se muestren enmetros.
Ú Nota: Las unidades de medida solo se pueden cambiar cuando la antena conectada estáen modo de espera.
Paletas de vídeo del radarHay diferentes paletas disponibles para el vídeo de radar y las estelas de blancos.
PPI ampliadoCon esta opción seleccionada, también es visible el vídeo de radar fuera de la escala derumbo como imagen sombreada. Los blancos, VRM y anillos de escala no son visibles en elárea de PPI ampliada.
Teclado en pantallaUn teclado virtual numérico o alfanumérico se muestra cuando es necesario para introducirla información de usuario en cuadros de diálogo.
Para introducir texto:
• Utilice las teclas de flecha para colocar el cursor sobre una tecla virtual y, a continuación,confirme la selección con la tecla Intro
• Seleccione una tecla virtual con la tecla izquierda del ratón
Si el teclado virtual está inactivo durante 10 segundos, se cerrará automáticamente.
18 Interfaz del usuario | R5000 Manual de Usuario

Complete la entrada y cierre el cuadro de diálogo, mediante la selección de la tecla virtualIntro.
Quite el teclado virtual sin guardar la información pulsando la tecla Salir.
Interfaz del usuario | R5000 Manual de Usuario 19

Funcionamiento básico
Encendido y apagado del sistema
EncendidoPulse la tecla STANDBY/BRILL (En espera/Brillo) para encender el sistema.
El sistema permanece encendido mientras esté conectado a la corriente eléctrica.
Cambio del sistema al modo En espera.Mantenga pulsada la tecla Standby/Brilliance para poner el procesador del radar R5000 y elmonitor en el modo de espera. El sensor de radar cambia al modo de espera solo si R5000 locontrola (conectado como maestro). Si está en el modo de clonación/esclavo, el sensorseguirá transmitiendo.
Ú Nota: Para controlar el sensor de radar en una instalación multirradar, consulte "La funciónInterswitch" en la página 25.
Ajuste del brillo de la pantallaEl brillo se ajusta desde la pantalla emergente Brillo.
• Muestre la ventana emergente pulsando la tecla Standby/Brilliance y, a continuación,ajuste el brillo de la pantalla moviendo el botón giratorio.
En el primer arranque, el brillo de la pantalla se establece en el 100 %. Cuando la unidad sereinicia, el brillo se establece automáticamente en el nivel que estaba antes de apagar launidad.
El sistema incluye una paleta de colores para luz diurna y nocturna. Cuando el brillo seestablece en el 40 % o menos, el sistema cambia para utilizar la paleta nocturna.
• Con la ventana emergente abierta, puede cambiar entre la paleta de día y la de nochepulsando las teclas de flecha izquierda (40 %) o derecha (100 %).
Cierre el cuadro emergente pulsando la tecla Exit
Este ajuste del brillo afecta a todos los elementos de la pantalla del panel del radar. Tambiénpuede ajustar el brillo de la pantalla para los diferentes elementos del panel. Consulte"Configuración del brillo de los elementos del panel" en la página 33.
Selección de fuente de radarSe puede conectar más de un sensor de radar al sistema de radar.
Seleccione el sensor de radar activo en el menú.
Para obtener información acerca de cómo controlar los sensores de radar en una instalacióncon varios radares, consulte "La función Interswitch" en la página 25.
Cambio del sensor entre modo de transmisión y standbyPuede cambiar entre el modo de transmisión y standby cuando se muestra el menúemergente de brillo.
• Para mostrar el menú emergente, pulse la tecla de standby/brillo y, a continuación, repitacon pulsaciones breves de la tecla para cambiar entre el modo standby y el modo detransmisión.
Ajuste del rango de radarLa escala del radar se muestra en el área de información del sistema en la imagen de radar.
4
20 Funcionamiento básico | R5000 Manual de Usuario

Para aumentar o reducir la escala:
• Seleccione una escala de radar predefinida con las teclas numéricas del control remoto.Consul"Controles frontales del O2000" en la página 13te.
Hay un vínculo directo entre la escala y el modo de funcionamiento del sensor de radarseleccionado.
Escala
Funcionamiento del radarestándar
Funcionamiento del radarResaltar Blancos
A B A B
1/8 nm (200 m) 0,08/3000 24 0,08/3000 24
1/4 nm 0,08/3000 24 0,08/3000 24
1/2 nm 0,08/3000 24 0,08/3000 24
3/4 nm 0,08/3000 24 0,08/3000 24
1,5 nm 0,08/3000 24 0,08/3000 24
3 nm 0,08/3000 24 0,25/1500 48
6 nm 0,25/1500 48 0,25/1500 48
12 nm 0,25/1500 48 0,8/750 72
24 nm 0,8/750 72 0,8/750 72
36 nm 0,8/750 72 0,8/750 72
48 nm 0,8/750 72 0,8/750 72
64 nm 0,8/750 72 0,8/750 72
72 nm 0,8/750 72 0,8/750 72
A: Longitud de pulso (µS/PRF (Hz)
B: Visibilidad de escala de radar máxima (NM)
Para obtener más información, consulte la documentación del sensor de radar.
Uso del cursorEl cursor se puede utilizar para medir la distancia, para definir diversos elementos de mapa deradar y para adquirir y seleccionar blancos dentro del área del PPI.
Por defecto, el cursor no está activo tras el encendido.
Para activar el cursor:
• Pulse una de las teclas de flecha• Coloque con el ratón el puntero dentro del área PPI
Cuando el cursor esté activo en la zona del PPI, la zona de información del cursor indicará laescala y el rumbo de la embarcación hasta la posición del cursor. Si el sistema está conectadoa una fuente de posición (por ejemplo, EPFS), el área de información del cursor incluye laposición geográfica del cursor.
Para desactivar el cursor:
• Pulse la tecla Salir• Coloque con el ratón el puntero fuera del área PPI
Funcionamiento básico | R5000 Manual de Usuario 21

Selección de fuente de velocidadLa información de la velocidad se puede obtener de diferentes fuentes de velocidadconectadas al sistema.
En cualquier momento, puede cambiar la fuente de velocidad principal deseada porcualquier sensor de velocidad disponible en el menú.
El modo de estabilización depende de la fuente de velocidad seleccionada. El sistemacambiará automáticamente al modo de estabilización disponible cuando se cambie la fuentede velocidad.
La tabla muestra los modos de estabilización disponibles para cada tipo de fuente develocidad. Toda restricción de una fuente se detalla bajo la descripción de cada fuente develocidad en las siguientes secciones.
Speed source (Fuente develocidad)
Modo de estabilizacióndisponible Restricciones
REGISTRO de velocidad (unsolo eje)
Mar Ninguno
REGISTRO de velocidad (dedoble eje)
Sea (mar) y Ground (tierra)(en función del transductor)
Ninguno
EPFS Ground (tierra) Ninguno
Manual Mar Sí
Auto drift (desviaciónautomática)
Ground (tierra) Sí
La fuente de velocidad principal (A), la fuente de velocidad secundaria (B) y el modo deestabilización (C) se muestran en el panel de información de la embarcación.
Ú Nota: En caso de percibirse un posible error en la integridad de los datos, lascoordenadas de la embarcación se resaltan en color amarillo.
CorrederaLa corredera puede tener una entrada de eje simple o doble, ya sea sobre el agua o sobre elfondo. Por lo tanto, el modo de estabilización disponible puede ser de mar o tierra, enfunción del sensor en uso.
Ú Nota: La velocidad a través del agua medida cerca del casco se ve afectada por la mareay las corrientes, por lo que de vez en cuando difiere significativamente de la velocidadsobre el fondo. Un registro de velocidad que mida la velocidad a través del agua puedeverse afectado en algunos casos específicos por las malas condiciones debido a, porejemplo, aire o hielo debajo del sensor. Si el sensor mide sólo el componentelongitudinal de la velocidad, el componente transversal de la embarcación esdesconocido para el radar.
EPFSEl EPFS proporciona velocidad real y rumbo sobre el fondo real.
Velocidad manualCuando esta opción está seleccionada, puede introducir manualmente la velocidad, laderivación y el rumbo.
Ú Nota: La velocidad manual no está disponible si el AIS está activado.
22 Funcionamiento básico | R5000 Manual de Usuario

Auto drift (desviación automática)Cuando esta opción está seleccionada, el sistema utiliza un blanco detectado fijo comoreferencia de velocidad para calcular la velocidad del barco. La función se utiliza cuando nohay sensores de velocidad disponibles.
Ú Nota: La opción auto drift solo está disponible si la función AIS está desactivada y hay unblanco establecido como referencia.
Advertencia: El eco utilizado como referencia debe ser un blanco fijo. Delo contrario, toda la velocidad que se calcule no será cierta, solo relativa alblanco de referencia. No es correcto seleccionar un barco anclado comoreferencia; no se señalará ninguna alarma cuando el barco comience amoverse y toda la velocidad real calculada cambiará a valores erróneos. Lassondas de referencia no deben utilizarse nunca para calcular la velocidadrelativa. Estos datos no siguen los cambios de velocidad con la precisiónadecuada para un sistema anticolisión.
Advertencia: Cuando se pierde el blanco de referencia, se emite unaadvertencia y la fuente de la velocidad se cambia automáticamente a lacorredera. Si la corredera funciona en velocidad sobre el agua, el modo develocidad pasará a ser estable en el mar y se notificará al usuario en el casode que se produzca un cambio en la estabilización. La pérdida de un blancode referencia puede suponer un impacto importante en la precisión de losresultados de la velocidad y el curso reales del blanco, y la precisión de lavelocidad se verá reducida.
Selección de un blanco de referenciaDebe seleccionarse un blanco de referencia antes de poder establecer la fuente de lavelocidad en deriva automática. El blanco de referencia se selecciona en el menú de blancos.
Para mostrar el menú de blancos, coloque el cursor sobre el objetivo deseado y, acontinuación:
• Pulse la tecla Intro• Pulse la tecla derecha del ratón.
El blanco de referencia está etiquetado con una R para identificarlo como referencia.
Seguimiento de blancosLa tecla Intro de O2000 y las teclas del ratón sirven para gestionar los blancos.
Para adquirir inmediatamente un blanco de radar o para activar o desactivar un blanco AIS enla posición del cursor:
• Pulse la tecla Intro• Pulse la tecla izquierda del ratón.
Hay más opciones disponibles en el menú de blancos, que se muestran:
• Manteniendo pulsada la tecla Intro• Pulsando la tecla derecha del ratón
Las opciones del menú de blancos dependen de si un blanco se encuentra en la posición delcursor, del tipo de blanco y del estado del blanco.
Ningún blanco en la posición del cursor
Blanco en la posición del cursor
R 18
Funcionamiento básico | R5000 Manual de Usuario 23

Puede ver más detalles sobre los blancos de radar y los blancos AIS en "Blancos" en la página35.
Reconocimiento de alertasPara reconocer la alerta más reciente:
• Pulse la tecla de aceptar (Acknowledge).
El encuadre cambia al panel de alertas.
Continúe pulsando esta tecla para seguir aceptando alertas de la parte superior del panelAlertas.
Pulse la tecla Salir para salir del panel Alertas.
Cuando se reconoce una alerta, el icono de alerta deja de parpadear y cambia al icono dereconocimiento. La sirena sigue sonando si persisten alertas sin reconocer; de lo contrario, sesilencia.
La alerta reconocida no se traslada a su nueva posición en el orden de clasificación hasta quehayan pasado 2 segundos sin reconocer ninguna alerta.
Para obtener más información, consulte "El sistema de alertas" en la página 66.
Aplicación de los ajustes de control por defectoLa opción de aplicación de los ajustes por defecto permite establecer rápidamente el sistemaen un estado predefinido. Los valores predefinidos se definen en el estándar de requisitos deradar.
Consulte "Personalización de los ajustes de control de radar" en la página 59.
Captura de pantallaPara realizar una captura de pantalla:
• Pulse a la vez la tecla Enter y la tecla de espera/brillo.
Las capturas de pantalla se guardan en la memoria interna.
24 Funcionamiento básico | R5000 Manual de Usuario

La función Interswitch
DescripciónLa función Interswitch permite compartir un sensor de radar entre varias estaciones decontrol.
Estación de control maestro por defectoLa estación de control conectada directamente a un sensor será siempre la estación decontrol maestro por defecto de ese sensor. Un maestro predeterminado tiene prioridadsobre las demás estaciones de control de la red Interswitch y puede asumir el controlmaestro de dicho sensor en cualquier momento.
En caso de fallo de la red Interswitch, la estación de control y sensor conectado directamentefuncionarán como un radar independiente.
La ilustración muestra una instalación con 2 sensores y 4 estaciones de control. Lasestaciones de control están conectadas a través de la red Interswitch En este ejemplo, elsensor A está conectado directamente por cable a la estación de control C. La estación decontrol C es el maestro por defecto del sensor A. Lo mismo se aplica al sensor B y la estaciónde control D.
AA
CC DD
BB
Modos de la estación de controlLa estación de control puede tener diferentes modos de control de los sensores conectadosa través de la red Interswitch.
La ilustración muestra un ejemplo de modos de control para una instalación con 2 sensores y4 estaciones de control.
CC
MMMMMRMR
SS
M Modo maestro
MR Modo maestro solicitado
5
La función Interswitch | R5000 Manual de Usuario 25

S Modo esclavo
C Modo de clonación
MaestroUna estación de control maestra (principal) tiene pleno control de un sensor de radar.
Solo puede haber una estación principal para cada sensor en un momento dado. Unaestación de control debe liberar su estado "maestro" antes de que otra estación de control sepuede establecer en el modo maestro.
Para liberar el control maestro:
• Cambie el estado en el menú. Consulte la sección "Cambio de un modo de control" en la página26
• Cambie el sensor de radar al modo de espera desde la ventana emergente de brillo.• Mantenga pulsada la tecla de espera/brillo para poner la estación de control en modo de
espera.
Cuando una estación de control solicita el control maestro de un sensor de radar, latransferencia queda pendiente hasta que la estación maestra actualmente libera su estadomaestro. Cuando el modo maestro para el sensor está disponible, el control cambiaautomáticamente.
Si varias estaciones de control solicitan el control maestro de un sensor de radar, latransferencia del control se decide en función de la tabla de prioridades definida durante laconfiguración del sistema.
Equipo secundarioUna estación de control secundaria ha restringido el control del sensor de radar.
Puede haber 3 estaciones de control secundarias para cada sensor de radarsimultáneamente.
Limitaciones del modo EsclavoUn componente esclavo (secundario) no puede acceder a:
• Controles de transmisión del radar.• Monitor de rendimiento• Sintonización del radar
Si hay un componente maestro (principal) para el mismo sensor, un componente esclavotiene limitaciones para las siguientes funciones:
• Encendido y apagado de transmisión: solo es posible si el sensor está configurado paratransmitir en la estación de control principal
• Escala de radar: el rango máximo de radar en un componente esclavo no puede excederel rango establecido en la estación de control principal
Ú Nota: La estación de control secundaria puede desactivar su presentación de radarpulsando la tecla de modo de espera/brillo en O2000.
ClonUna estación de control clon refleja la imagen de una estación de control seleccionada. Unclon no puede controlar un sensor de radar.
Si se desconecta la consola que controla el sensor de radar, el clon perderá la conexión conel sensor de radar. El clon tendrá que seleccionar manualmente un nuevo sensor.
Puede haber varias estaciones clon para cada estación de control simultáneamente.
Cambio de un modo de controlPara solicitar un modo de control para un sensor de una estación de control:
1 Seleccione el estado que desea solicitar (A).
2 Asigne el estado a un sensor (B)
26 La función Interswitch | R5000 Manual de Usuario

La indicación de color (C) de los sensores muestra si una estación de control se puedeconectar como la estación de control maestro de un sensor:
• Verde: el sensor está disponible para control maestro• Amarillo: otra estación de control tiene el control maestro del sensor
También se puede solicitar el modo de control maestro o esclavo desde el cuadro de diálogode estado de la red del sensor.
Indicación del estado de controlEl modo de funcionamiento de la estación de control (A) con relación al sensor de radaractivo (B) se indica en el panel de información del sistema.
La función Interswitch | R5000 Manual de Usuario 27

Ajuste de la imagen de radarSe puede mejorar la imagen de radar ajustando la ganancia, filtrando los ecos no deseadosproducidos por el ruido del mar, la lluvia u otras condiciones climáticas y ajustando lasensibilidad del receptor del radar.
Algunas de las funciones incluyen un modo manual y otro automático. Se recomienda usarel modo manual solo si el modo automático no proporciona resultados satisfactorios.
Ú Nota: Los ajustes de la imagen del radar no afectan a los blancos AIS.
Podría haber presente, al mismo tiempo, ruido producido por el mar y por la lluvia, lo queprovocaría una mayor degradación del rendimiento de detección. Como el ruido del mar sepresenta a corto alcance y el de la lluvia está presente a mayor alcance, se pueden ajustar losvalores del ruido de la lluvia sin que ello afecte a los ecos en el ruido del mar.
No se deben utilizar pulsos largos en condiciones de mucha lluvia, ya que el alcancedisminuirá significativamente. Consulte "Límites de rendimiento" en la página 29.
La imagen de radar se controla tal y como se describe en las siguientes secciones.
Ú Nota: Se recomienda desactivar las estelas cuando se ajusta la imagen de radar, ya quepueden obstaculizar una respuesta de ajuste de vídeo adecuada.
Calibración de los ajustes automáticosAlgunos ajustes del radar incluyen un modo automático.
Para lograr el mejor resultado posible en el modo automático, el valor se puede calibrarmanualmente. El texto del icono de control cambiará de AUTO a A ± NN, lo que indica queel ajuste automático se ha calibrado manualmente.
Para calibrar de forma precisa el ajuste automático:
• Active la opción automática• Utilice el mando giratorio o las teclas de flecha para ajustar manualmente la configuración
GananciaLa opción de ganancia controla la sensibilidad del receptor de radar. Una mayor gananciahace al radar más sensible a los ecos de radar, permitiéndole mostrar blancos más débiles. Sila ganancia se ajusta demasiado alta, la imagen queda distorsionada con ruido de fondo.
Ú Nota: El control de ganancia no debe utilizarse para limpiar la imagen de ruido de mar olluvia.
El valor de ganancia debe configurarse de forma que el ruido de fondo solo aparezcalevemente en el panel de radar.
En la puesta en marcha del sistema, la ganancia es un 80 % para que pueda recibir el mejornivel de ruido.
Ganancia cuenta con un modo manual y otro automático.
Ajuste de la ganancia:Para ajustar la ganancia:
• Pulse la tecla de ganancia para activar la función y, a continuación, mueva el botóngiratorio para ajustar manualmente la configuración
• Mantenga pulsada la tecla de ganancia para activar/desactivar la opción automática
6
28
Sea clutter (filtro anti ruido del mar)La opción de filtro anti ruido de mar sirve para filtrar los retornos de eco aleatorios producidos por las olas próximas a la embarcación. Al aumentar el valor, la sensibilidad del
Ajuste de la imagen de radar | R5000 Manual de Usuario

ruido de campo de corta distancia ocasionado por las olas se reduce. Si el valor se aumentademasiado, tanto el ruido del mar como los blancos desaparecerán de la pantalla. Losblancos situados alrededor de la embarcación podrían no mostrarse como blancospotencialmente peligrosos.
Advertencia: Al aumentar los niveles de ruido del mar, algunos de losblancos no se pueden detectar incluso mediante el filtro anti ruido de mar,puesto que las boyas u otros objetos pequeños producen ecos de un nivelinferior al que producen las olas.
El valor del filtro anti ruido de mar debe establecerse de modo que el ruido se considerecomo pequeños puntos, así los blancos pequeños pasan a ser distinguibles alrededor delbarco.
El filtro anti ruido del mar tiene un modo manual y un modo automático. El sistema incluyeajustes predefinidos para condiciones de mar calmas, moderadas y agitadas.
Ajuste de Sea clutter (filtro anti ruido de mar)Para ajustar Sea clutter:
• Pulse la tecla Mar para activar la función y, a continuación, mueva el mando giratorio paraajustar la configuración.
• Mantenga pulsada la tecla para activar/desactivar la opción automática
Filtro anti lluviaLa opción Rain para el ruido de lluvia se usa para reducir el efecto de la lluvia, la nieve y otrascondiciones meteorológicas en la imagen del radar. Al aumentar el valor, la sensibilidad delruido de campo de larga distancia ocasionado por la lluvia se reduce. El valor no deberíaaumentarse demasiado pues podría filtrar blancos reales.
Si la precipitación se produce sobre la embarcación, el ajuste del ruido de la lluvia afectará ala presentación de ecos cercanos.
El filtro anti ruido de lluvia tiene un modo manual y un modo automático.
Ajuste del filtro antilluvia:Para ajustar el filtro antilluvia:
• Pulse la tecla Lluvia para activar la función y, a continuación, mueva el mando giratoriopara ajustar la configuración.
• Mantenga pulsada la tecla para activar/desactivar la opción automática
Límites de rendimientoLas figuras siguientes muestran de qué modo la cantidad de lluvia y la longitud de pulsoafectan al alcance de detección (NM) en radares de banda X y S.
El eje vertical (A) representa la reducción del alcance para la primera detección de un blanco.El eje horizontal (B) representa el alcance original para la primera detección de un blanco.
Como ejemplo de longitud de pulso larga: un blanco que se puede detectar a 10 NM solo sepuede detectar a 3 NM con 16 mm de lluvia.
Ajuste de la imagen de radar | R5000 Manual de Usuario 29

Ajuste del sensor de radarPuede sintonizar el sensor del radar para mostrar el máximo retorno de blancos en lapantalla.
La sintonización cuenta con un modo manual y otro automático.
En el modo de sintonización automático, el sistema realiza una sintonización del sensor delradar cuando cambia la escala.
La sintonización manual sólo debe utilizarse si falla la sintonización automática. No se debellevar a cabo la sintonización hasta transcurridos 10 minutos del encendidor del radar. Lasintonización manual se realiza mejor con un pulso largo (escala establecida en 24 NM) yutilizando un alto nivel de ganancia. En este caso, ajuste el control de sintonización paraobtener la máxima potencia de la señal.
Ajuste de la sintonizaciónEl control remoto del O2000 no dispone de una tecla de ajuste específica. Ajuste lasintonización con el ratón o mediante una combinación del ratón y el control remoto:
• Seleccione la tecla de acceso rápido a la sintonización para activar la función; acontinuación, utilice la rueda de desplazamiento o el botón giratorio para ajustar laconfiguración.
• Pulse la tecla izquierda del ratón dos veces para activar/desactivar la opción automática.
30 Ajuste de la imagen de radar | R5000 Manual de Usuario

Opciones de vista de radarHay disponibles varias opciones de vistas de radar en el menú.
Ú Nota: El modo de movimiento y las opciones de offset se desactivan en el alcance dezoom máximo (72 NM). Las funciones se vuelven a activar cuando se baja el zoom unnivel.
Estelas de blanco y posición pasadaEl modo en que se muestran los blancos de radar en la imagen de radar se selecciona en elsubmenú Trails & PAST POSN (tracks y posición pasada). Consulte "Ajustes de pantalla para blancos deradar" en la página 37.
Orientación del radarLa orientación de radar seleccionada se muestra en el panel de información del sistema (A).
Rumbo arribaEn el modo Head-up (rumbo arriba), la línea de rumbo en el PPI se orienta a 0° de la escala derumbo y hacia la parte superior de la pantalla. La imagen de radar se muestra en relación conla embarcación y, cuando el barco vira, la imagen de radar gira.
Ú Nota: Head-up sólo está disponible en el modo de movimiento relativo, y es el únicomodo de orientación disponible si el radar no está conectado a una fuente de rumbo.
Norte arribaEn el modo de norte arriba, la indicación 0° en el PPI representa el norte. La línea de rumboen el PPI está orientada según el rumbo de la embarcación, obtenido del compásgiroscópico. Cuando el barco vira, la línea de rumbo cambia su dirección de acuerdo con elrumbo del barco, mientras que la imagen de radar permanece estabilizada.
La orientación norte arriba no está disponible si no hay fuente de rumbo conectada al radar.Si los datos de rumbo se pierden, el sistema cambiará automáticamente a la orientaciónrumbo arriba.
Curso arribaEn el modo Curso arriba, la parte superior de la escala de rumbo indica el curso verdadero dela embarcación medido desde el norte en el momento en el que se activó Curso arriba.Cuando el barco gira, la escala de rumbo permanece fija, mientras que la línea de rumbo giracon el viraje de la embarcación y el curso cambia.
La orientación Curso arriba se restablece cuando se vuelve a seleccionar el modo Cursoarriba.
7
Opciones de vista de radar | R5000 Manual de Usuario 31

Modo de movimiento de radarEl modo de movimiento de radar seleccionado se muestra en el panel de información delsistema (B).
Movimiento relativoEn el movimiento relativo, la embarcación permanece en una ubicación fija en el PPI deradar, y todos los demás objetos se desplazan relativos a su posición.
Seleccione la posición de la ubicación fija tal y como se describe en "Compensación del centro del PPI"en la página 32.
Movimiento realCon la opción de movimiento real, la embarcación y todos los blancos móviles se muevenpor el PPI de radar mientras navega. Todos los objetos fijos permanecen en una posición fija.Cuando el símbolo de la embarcación alcanza el 75 % del radio del PPI (A), la imagen deradar se vuelve a dibujar con el símbolo de la embarcación recolocado (B) a 180° frente alrumbo de dirección actual.
A
B
Cuando se selecciona el movimiento Real, la opción de restablecimiento del movimientoReal se encuentra disponible en el menú. Esto permite actualizar la imagen del radarmanualmente de modo que el símbolo de la embarcación aparezca en su posición inicial.
Ú Nota: El movimiento Real sólo se encuentra disponible cuando el PPI se encuentra enmodo de orientación Norte arriba o Curso arriba.
Compensación del centro del PPIPuede establecer el origen de la posición de la antena en otra ubicación en el PPI del radar.Las opciones que se describen en las siguientes secciones se encuentran disponibles.
Centro del PPI: centro Centro del PPI: vista avanzada Centro del PPI: offset
Ú Nota: La escala del rumbo está conforme al punto de referencia común constante(CCRP), mientras que el offset establece la posición de la antena del radar en el PPI. Elporcentaje máximo de fuera de centrado es 75 % del radio en la escala actual. Estopuede provocar que el CCRP se encuentre fuera de la escala de rumbo. En tales casos, elCCRP sigue tomando las medidas y la escala de rumbo se comprime en consecuencia.
32
Restablecimiento del centro de PPIEn movimiento relativo, se puede restablecer el offset con la opción correspondiente del menú.
En movimiento verdadero, el offset se eliminará cuando la imagen del radar se vuelva a dibujar automáticamente. Puede eliminar manualmente el offset con la opción de restablecimiento del movimiento verdadero del menú.
Opciones de vista de radar | R5000 Manual de Usuario

Opción de menú - Movimiento relativo Opción de menú - Movimiento verdadero
Vista avanzadaLa opción Vista avanzada se utiliza para maximizar la vista por delante de la embarcación.Cuando se selecciona esta opción, el centro del PPI se coloca al 70 % del radio del PPI, 180°en frente de la parte superior de la pantalla.
Ú Nota: La opción de vista avanzada solo está disponible para la orientación del radarRumbo arriba.
Offset a la posición del cursorEsta opción le permite utilizar el cursor para seleccionar el centro de la antena.
Al seleccionar esta opción, el cursor se muestra en el PPI.
• Mueva el cursor a la opción de offset que prefiera. Seguidamente, pulse la tecla Enter o elbotón izquierdo del ratón para mover el centro del PPI a la posición del cursor.
VectoresUn vector de blanco indica el movimiento esperado de un blanco en un tiempodeterminado. Los vectores se calculan multiplicando la velocidad del blanco por el valor detiempo establecido.
Puede seleccionar que se muestren los vectores de blanco con la velocidad real o relativa yajustar la longitud del vector. La longitud representa el movimiento de la embarcación en elperíodo de tiempo establecido.
Los ajustes de vector se muestran en el panel de indicadores de blancos (A).
Ú Nota: La indicación de velocidad real no es posible si hay un fallo de la giroscópica o dela fuente de velocidad. Si los vectores se encuentran en la presentación real y uno de lossensores (giroscopio o registro de velocidad) falla, la presentación cambiaautomáticamente a relativa.
Rumbos del cursorPuede seleccionar que los rumbos del cursor se muestren como True (real) o Relative(relativo) en cuanto a la embarcación.
Ú Nota: True (real) sólo puede seleccionarse cuando hay disponible un giroscopio.
Configuración del brillo de los elementos del panelEl brillo se puede configurar de forma individual para los distintos elementos del panel.
Opciones de vista de radar | R5000 Manual de Usuario 33

Gráfico de la embarcación propiaCon una escala pequeña, el gráfico de la embarcación propia se puede activar o desactivar.
34 Opciones de vista de radar | R5000 Manual de Usuario

Blancos
Menú de blancosCuando el cursor está activo, el menú de blancos puede mostrarse:
• Manteniendo pulsada la tecla Intro• Pulsando el botón derecho del ratón
Los elementos del menú de blancos dependen de si un blanco se encuentra en la posicióndel cursor, del tipo de blanco y del estado del blanco.
Si hay más de un blanco en la posición del cursor, el menú mostrará el número de referenciade los blancos de radar y de los nombres de los barcos de los blancos AIS.
Ningún blanco en la posición del cursor Un blanco en la posición del cursorDos blancos de radar en la posición del
cursor
Para cerrar el menú de blancos:
• Pulse la tecla Salir• Vuelva a pulsar el botón derecho del ratón
Panel de blancosEl panel de blancos puede mostrar información básica de hasta cuatro objetivos (A), o bieninformación detallada sobre un blanco seleccionado (B).
En el panel de blancos, se incluyen los siguientes blancos:
• Blancos de radar detectados• Blancos AIS activados• Blancos peligrosos
Los blancos se muestran por orden de prioridad, en función del momento en que aparecen(el primer blanco aparece en la parte superior).
Selección y anulación de selección de blancosLos blancos AIS y los blancos de radar detectados pueden seleccionarse desde el menú deblancos. Solo puede seleccionarse un único blanco al mismo tiempo.
Al seleccionar un blanco de radar o AIS, el símbolo del blanco cambia al icono de blancoseleccionado, y el panel de blancos cambia para mostrar información detallada sobre dichoblanco
8
Blancos | R5000 Manual de Usuario 35

Blanco de radar seleccionado Blanco AIS seleccionado
Para anular la selección de un blanco y quitar la información detallada sobre el mismo en elpanel de blancos:
• Seleccione la opción de anulación de selección de blanco en el menú de blancos
Ú Nota: El blanco cuya selección se ha anulado se coloca primero en la lista del panel deblancos.
Definición de barcos peligrososPuede utilizar los valores del CPA (punto más cercano de aproximación) y del TCPA (tiempoal punto más cercano de aproximación) para definir cuándo un objetivo debe considerarsecomo un peligro. Cuando un radar o un blanco entran en el límite de distancia de CPA o enel límite de tiempo de TCPA, el símbolo cambia al de objetivo peligroso.
Blancos de radarCualquier eco de radar dentro de una escala preestablecida se puede adquirir y detectar. Elsistema puede detectar hasta un número preestablecido de blancos de radar. Para conocerla escala y número de blancos, consulte "Especificaciones técnicas" en la página 85.
Se activa una alarma si el número de blancos detectados supera el 95 % del límite máximodel sistema y cuando se alcanza la capacidad máxima. Solo se visualizará el blanco máscercano a la embarcación.
Puede adquirir manualmente un blanco de radar tal y como se describe en la siguientesección.
La opción de zona de guarda permite al sistema adquirir blancos automáticamente. Consulte"Zonas de seguimiento" en la página 47.
Adquisición manual de blancos de radarCuando el cursor está activo, se puede adquirir inmediatamente un blanco de radar en laposición del cursor:
• Pulsando la tecla Intro• Pulsando el botón izquierdo del ratón.
También puede adquirir un blanco en el menú de blancos. Puede mostrar el menú:
• Manteniendo pulsada la tecla Intro• Al pulsar el botón derecho del cursor
Es posible que haya un retraso después de haber adquirido un blanco de radar antes de queel sistema reciba datos de blanco estables:
• Después de 1 minuto, el símbolo mostrará un vector de tendencia, y la velocidad y elrumbo de la tendencia se mostrarán en el panel de blancos.
• Después de 3 minutos, el símbolo se quedará fijo y todos los campos de datos de blancosseleccionados estarán disponibles. El símbolo de blanco cambiará al símbolo de blanco deradar detectado.
36 Blancos | R5000 Manual de Usuario

El tiempo de encima hace referencia a las peores situaciones. En una situación estable, lainformación sobre blancos del radar está disponible de forma inmediata.
Símbolos de blancos de radarSe utilizan los siguientes símbolos para los blancos de radar del sistema:
Símbolo Descripción
Blanco de radar detectado con vector de velocidad
Blanco de radar seleccionado, indicado con un cuadrado (líneadiscontinua) alrededor del símbolo del blanco
Blanco de radar peligroso, indicado con una línea gruesa decolor rojo. El símbolo parpadea hasta que el operador confirma laalarma del blanco. Permanecerá rojo hasta que el sistema ya no lodefina como un blanco peligroso
Blanco de radar perdido, indicado con líneas cruzadas centradasen el símbolo del blanco. El símbolo se encuentra en la últimaposición recibida del blanco
RBlanco de referencia
18Blanco de radar con posición pasada y vector de velocidad
Blanco de radar en estado de adquisición, indicado como uncírculo discontinuo centrado en la posición de adquisición delblanco
Blanco asociado: uso de los datos de radar
Ajustes de pantalla para blancos de radar
El modo en que se muestran los blancos de radar en la imagen de radar se selecciona en elmenú Trails & PAST POSN (tracks y posición pasada).
Los valores se indican en el panel de indicadores.
Modo de presentación de estelas y posición pasadaLos indicadores de estelas y posición pasada se pueden visualizar como reales o relativos conrespecto a la embarcación.
Los indicadores de estelas y posición pasada están disponibles en los modos de estabilización de mar y tierra. Consulte "Selección de fuente de velocidad" en la página 22.
Opción Estelas de BlancosUna estela de un blanco indica el movimiento del blanco dejando una estela, cuya intensidad se reduce con el paso del tiempo.
Las estelas de blanco muestran dónde solía estar un blanco, y la función es útil para evaluar rápidamente el movimiento de los blancos en relación con la embarcación.
Blancos | R5000 Manual de Usuario 37

Puede establecer la longitud de las estelas. La longitud representa el tiempo que tarda laestela en desvanecerse.
La opción para borrar estelas borra las estelas del panel del radar temporalmente. Las estelascomienzan a aparecer de nuevo a menos que apague la función.
Visualización de la posición pasada de un blanco• Posiciones pasadas: sirve para visualizar las posiciones anteriores de un blanco detectado
o un blanco AIS activado• Tiempo: define la duración de tiempo durante el que deben mostrarse las posiciones
pasadas de cada blanco en el PPI• Intervalo: define la distancia entre cada indicador de posición pasada
Advertencia: La acumulación de estelas comienza al salir del estado deespera. La longitud de las estelas o de la posición pasada se lograráúnicamente tras la duración de tiempo seleccionada.
Posibles errores de detección de blancosAlgunos factores pueden generar errores de detección o dificultar la lectura de la imagen deradar y, por lo tanto, reducir la capacidad de detección de blancos:
• Retornos de mar, lluvia, nieve y nubles bajas• Interferencias del radar• Ecos de lóbulo lateral• Sectores ciegos• Baja relación señal/ruido y relación señal/interferencia
Advertencia: La velocidad y el rumbo de un blanco de radar se obtienencon mediciones consecutivas de la posición del eco. Después se filtran losdatos para llegar a la precisión requerida. Esto significa que cada cambiobrusco de velocidad y dirección será reconocido con cierto retraso hastaalcanzar la certeza absoluta de que el blanco se mueve de forma diferente.El retraso de confirmación es de alrededor de cinco barridos y, tras eso, senecesita tiempo adicional para alcanzar a la misma precisión de datos deantes de la maniobra.
38
Retornos de mar, lluvia, nieve y nubles bajasLos ecos del radar en zonas de grandes olas, lluvia o condiciones meteorológicas adversas pueden verse enmascarados por las interferencias. Los efectos de dichos errores aparecen como grandes y continuos cambios en el curso y los vectores de velocidad del blanco. A veces, el símbolo de un blanco adquirido a alta velocidad puede alejarse de la verdadera posición del blanco tras cierto tiempo, lo que puede generar la alarma de blanco perdido.
Estos errores pueden evitarse o al menos minimizarse con los ajustes manuales adecuados de los controles de mar y lluvia, o si selecciona la opción de control automático. Para obtener más información, consulte "Ajuste de la imagen de radar" en la página 28.
Interferencias del radarOtros radares en funcionamiento dentro de la misma banda de frecuencia pueden generar interferencias. Normalmente, esto se observa en la pantalla de radar como una serie de espirales. Cuando la interferencia cae sobre un blanco detectado, puede provocar una deformación del tamaño del eco y, por lo tanto, un pequeño error en el curso y los valores de velocidad del blanco.
La opción de ajuste está disponible en el menú Avanzado. Consulte "Rechazo de interferencias de radar" en la página 61.
Blancos | R5000 Manual de Usuario

Eco de rastreo secundarioEco de rastreo secundario es aquel que se recibe de un blanco distante, después detransmitido el siguiente pulso.
Los ecos de rastreo secundarios solo están presentes en condiciones atmosféricas anómalas,o en condiciones de superrefracción.
Estos ecos se mostrarán en su demora correcta, pero en una escala incorrecta.
Los ecos de rastreo secundarios pueden reconocerse por su forma irregular. Puesto que elperíodo entre dos pulsos transmitidos subsiguientes está sujeto a pequeñas variaciones, eleco de rastreo secundario aparece poco definido y borroso.
El radar suprime automáticamente los ecos de rastreo secundarios cuando el rechazo deinterferencias está activado. Consulte "Rechazo de interferencias de radar" en la página 61.
Ecos de lóbulo lateralLas antenas de radar tienen un patrón de radiación que consta de un lóbulo principal y varioslóbulos laterales muy pequeños. La mayoría de la energía transmitida por el radar se emite yse recibe en el lóbulo principal, y una parte muy pequeña en los lóbulos laterales. Esto notiene efecto en caso de blancos pequeños o distantes, pero los retornos de un gran blanco acorta distancia (menos de 3 NM) puede generar, en ambos lados del eco principal y en lamisma escala, arcos o series de pequeños ecos. Estos efectos, cuando son una extensión deleco principal, pueden provocar errores momentáneos de detección y los valores de rumbo yvelocidad proporcionados por la detección pueden volverse inestables.
Normalmente, el problema se puede eliminar o reducir considerablemente mediante unajuste preciso del control de Sea (mar) Consulte "Sea clutter (filtro anti ruido del mar)" en la página 28.
Sectores ciegosLos canales, mástiles o cualquier otro tipo de obstrucción (cuando se encuentran cerca de laantena del radar) pueden provocar sectores ciegos o con sombras, en los que se puedeperder por completo o reducir drásticamente la visibilidad de los blancos. Los blancos quepermanecen en estos sectores demasiado tiempo (más de 10 revoluciones de antena) seconsiderarán como perdidos, y se activará la alarma de blanco perdido.
Baja relación señal/ruido y relación señal/interferenciaEn situaciones en las que la relación señal/ruido o señal/interferencia de los ecos de radar esbaja (pequeñas embarcaciones con intenso ruido de lluvia o mar gruesa, o embarcacionesgrandes cerca del horizonte del radar), la detección de blancos será débil y no se detectará elblanco en cada revolución de antena. Esto provocará errores en el seguimiento que puedenvariar desde la pérdida de información a la pérdida completa del blanco cuando no se haencontrado en 10 revoluciones de antena.
Radar SARTUn SART (traspondedor de búsqueda y rescate) se utiliza en emergencias. Estos dispositivospueden ser un radar SART o un AIS-SART basado en GPS.
El radar SART se utiliza para localizar una embarcación de supervivencia o en peligromediante la creación de una serie de puntos en el PPI del radar. La escala de detección de unradar SART es normalmente de unos 8 NM y cualquier radar de alta definición o de banda Xpuede activar su señal.
Como el radar SART está muy cerca, los lóbulos laterales de la antena del radar puedenmostrar las respuestas como una serie de arcos o anillos concéntricos. Este efecto puedeeliminarse mediante el uso del filtro anti ruido de mar. Es útil observar los lóbulos laterales yaque podrían ser más fáciles de detectar en condiciones de ruido y confirmarán que el radarSART está muy cerca de la propia embarcación.
Blancos | R5000 Manual de Usuario 39

A
B C
D
Radar SART lejos de la propia embarcación (escala: 24 NM)
B
A
D
Radar SART cerca de la propia embarcación (escala: 3 NM)
A Posición de SART
B Eco de SART
C Ancho de haz de la antena del radar
D Posición de la embarcación
Configuración recomendada para la detección de radar SARTPara detectar mejor una señal de radar SART, ajuste la configuración de la siguiente manera:
• Establezca la escala entre 6 y 24 NM- El espaciado entre las respuestas es demasiado pequeño para poderse distinguir en
escalas mayores (0,64 NM)- La longitud de respuesta del radar SART (12 puntos) puede extenderse hasta 9,5 NM
más allá de la posición del radar SART, y es necesario ver más de un punto de respuestapara distinguir el radar SART de otras respuestas
• Configure el control de ruido de mar en modo manual y ajústelo al mínimo- Un valor alto podría eliminar la respuesta del SART
Ú Nota: Con un valor mínimo para el filtro anti ruido de mar, los barcos dentro de la escalade ruido podrían no ser visibles para el radar.Si el filtro de mar es fuerte cuando el control del filtro anti ruido de mar está configuradoal mínimo, los primeros puntos de la respuesta del radar SART pueden no serdetectables. En tales condiciones, la posición del radar SART puede estimarse utilizandola función no centrada EBL/VRM y midiendo 9,5 millas náuticas desde el punto máslejano hasta el barco en sí.
• Configure el control del filtro anti ruido de lluvia en modo manual y ajústelo según seanecesario para evitar ruido de lluvia- La configuración no afecta a la detección del radar SART
• Configure el control de ganancia en modo manual y ajústelo para ver algunos puntos deruido en segundo plano- Por lo general, se puede utilizar una configuración de ganancia normal para
detecciones de gran escala (alrededor del 80 % de la escala máxima)
• Desactive el resaltado de blancos. Consulte "Opción Resaltar Blancos" en la página 61- La forma y dimensión de los puntos del radar SART pueden verse afectados por esta
configuración.
Advertencia: El operador debe tener cuidado al utilizar el radar con estosajustes. El radar no sintonizado no será capaz de ver y detectar blancoscomo lo haría cuando está sintonizado, y es posible que las funcionesanticolisión ya no funcionen. El sintonizado debe volver a la normalidad loantes posibles.
40 Blancos | R5000 Manual de Usuario

RACONUn racon (baliza de radar) es un transpondedor de radar que se utiliza normalmente paramarcar peligros para la navegación marítima.
Un racon responde a un pulso de radar recibido mediante la transmisión al radar de unamarca identificable. La respuesta mostrada tiene una longitud en la pantalla del radar quecorresponde a algunas millas náuticas, cifradas como un carácter en Morse que comienzacon una raya para su identificación. El retraso inherente en el racon provoca que la respuestamostrada aparezca detrás del eco de la estructura en la que está montado el racon (A).
A
Los RACON y sus marcas de identificación se indican normalmente en las cartas marinas. Sufunción puede cambiar según el país en el que se utilizan. Generalmente se utilizan para:
• Identificar ayudas para la navegación, tanto en el mar (boyas) como basadas en tierra(faros)
• Identificar lugares para tocar tierra o posiciones en líneas de costa inadvertidas• Indicar zonas navegables bajo puentes• Identificar plataformas petrolíferas en alta mar y estructuras similares• Identificar y avisar de áreas sensibles del entorno (como arrecifes de coral)
En algunos países también se utilizan para:
• Marcar peligros nuevos y que no aparecen en las cartas (se debe utilizar el identificadorMorse "D")
• Identificar puntos centrales y de giro• Dirigir racon de línea
Los RACON instalados en las boyas suelen estar activos durante 20 segundos y, después, seapagan durante los siguientes 20 segundos.
Ajustes recomendados para la detección de RACONLa respuesta de un RACON puede degradarse por el control del filtro anti ruido de lluvia ymar y por la supresión de interferencias. Al desactivar los ajustes mencionados anteriormentedebería mejorar la visibilidad de RACON en el PPI. La escala de detección de un RACONtambién puede reducirse si el receptor de radar no está sintonizado.
Blancos AISSi se ha conectado un receptor AIS compatible al sistema de radar, se pueden mostrar yseguir los blancos AIS.
El sistema puede mostrar y activar un número preestablecido de blancos AIS. Consulte losdetalles en "Especificaciones técnicas" en la página 85. Se activa una alarma si el número deblancos AIS supera el 95 % del límite máximo del sistema y cuando se alcanza la capacidadmáxima. Cuando se alcanza la capacidad AIS total, se visualizarán blancos AIS adicionalessiguiendo una lógica de prioridad basada en el alcance. Solo se visualizará el blanco máscercano a la embarcación.
La función AIS está disponible cuando:
• Los datos AIS están disponibles a través de la línea serie• El rumbo del compás con giroscopio está disponible Si se pierde el rumbo giroscópico, la
función AIS se apaga automáticamente
Blancos | R5000 Manual de Usuario 41

• La posición válida del EPFS está disponible
De forma predeterminada, todos los blancos AIS se muestran como blancos inactivos si lafunción AIS está activada. Puede activar manualmente un blanco inactivo, o puedeconfigurar el sistema para que active de forma automática los blancos inactivos, tal como sedescribe en las siguientes secciones.
Los blancos AIS pueden filtrarse según se describe en "Filtros de blancos AIS" en la página 43.
Activación de blancos AISTodos los blancos AIS se presentan inicialmente en estado inactivo (A). Los blancos inactivosno muestran vectores ni líneas de rumbo, solo un pequeño icono apuntando la dirección a laque se dirige el blanco.
Se puede cambiar manualmente un blanco inactivo a un blanco activo (B). Un blanco AISactivo muestra un icono más grande y tiene un vector asociado, una línea de rumbo y unindicador de giro si está disponible. Solo los blancos AIS activos se muestran en el panel deblancos.
Los blancos AIS activos siempre se procesan frente a límites CPA/TCPA y se definen comopeligrosos si se superan dichos límites.
Activación manual de un blanco AISCuando el cursor está activo, puede activar inmediatamente un blanco AIS en la posición delcursor:
• Pulsando la tecla Intro• Pulsando el botón izquierdo del ratón.
También puede activar un blanco AIS en el menú de blancos, que se muestra:
• Manteniendo pulsada la tecla Intro• Al pulsar el botón derecho del cursor
Activación automática de blancos AISSe puede activar el sistema para que cambie automáticamente un blanco inactivo a unblanco activo cuando los valores CPA o TCPA sean inferiores a los establecidos como valormínimo de seguridad. En esta situación, el blanco AIS se define automáticamente como unblanco peligroso.
42 Blancos | R5000 Manual de Usuario

ID de embarcación AISLos blancos AIS activados se muestran junto con el ID de la embarcación.
Símbolos de blancos AISEn el sistema se utilizan los siguientes iconos para los blancos AIS:
Símbolo Descripción
Blanco AIS inactivo, alineado con la información de rumborecibida o con la información de COG si el rumbo no está disponible
Blanco AIS con línea de rumbo y SOG/COG (línea discontinua), ycon indicación de sentido de giro
Blanco AIS con contornos de escala real
Blanco AIS con track pasado
Blanco AIS seleccionado, indicado con un cuadrado (líneadiscontinua) alrededor del símbolo del objetivo
Blanco AIS peligroso, indicado con una línea gruesa de color rojo.El símbolo parpadea hasta que el operador confirma la alarma delblanco
Blanco AIS perdido, indicado con líneas cruzadas centradas en elsímbolo del blanco. El símbolo se encuentra en la última posiciónrecibida del blanco
Blanco asociado: uso de los datos AIS
SART AIS (Transmisor de búsqueda y salvamento AIS)
Estación base de AIS
AtoN real (Ayuda a la navegación)
+ AtoN virtual
Para conocer la lista completa de símbolos de AIS y AtoN, consulte "Símbolos de blancos" en lapágina 77.
Ú Nota: Se dibuja un símbolo con una línea discontinua si no es posible calcular cómoevitar colisiones.
Filtros de blancos AISPuede seleccionar el filtrado de iconos en función de la clase AIS, alcance y velocidad del blanco.
Blancos | R5000 Manual de Usuario 43

Asociación de blancos AIS y de radarCuando se adquiere una sonda con el símbolo de AIS en la parte superior para realizarseguimientos, el sistema puede detectar que los dos símbolos representan el mismo blancocon la función de asociación de blancos. Cuando esta función está activa, el blanco de radary el blanco AIS se asocian. Seleccione si usar los datos de fuente desde el blanco AIS o desdeel blanco de radar detectado.
Blancos asociados: uso de los datos AIS Blancos asociados: uso de los datos de radar
Esta función es útil para reducir el número de símbolos de AIS y los blancos de radar en elPPI. Demasiados blancos pueden causar interferencias en la pantalla y provocar situacionesde peligro. La función también compensa posibles fallos en uno de los dos blancos, porejemplo, si el blanco de radar detectado está detrás de una isla, el sistema continúasiguiendo y visualizando el blanco AIS.
Ú Nota: El sistema continúa analizando el blanco de radar detectado cuando la asociaciónde blancos está activa.
Visualización de información de blanco
Cuadro de diálogo BarcosEl cuadro de diálogo Barcos muestra una lista de todos los blancos de AIS y MARPA.
Por defecto, en el cuadro de diálogo aparecen los blancos, ordenados por distancia a lapropia embarcación. Puede seleccionar cambiar el orden y hacer que solo se muestre el tipode blanco seleccionado.
En el cuadro de diálogo Barcos también se indican los mensajes AIS recibidos.
Para mostrar el cuadro de diálogo Barcos:
• Seleccione la opción de datos en el menú.• Mantenga pulsada la tecla de AIS.
44 Blancos | R5000 Manual de Usuario

Detalles barco AISHay disponible información detallada sobre un blanco de AIS en el cuadro de diálogoDetalles barco AIS.
Para mostrar el cuadro de diálogo:
• Seleccione la opción Información Adicional de AIS en el menú de blancos.• Seleccione un blanco de AIS en el cuadro de diálogo Barcos.
Simulador de formaciónLa función de formación sirve para entrenar al usuario en la adquisición manual de blancosde radar, en la selección de blancos y en los procedimientos de seguimiento.
Blancos | R5000 Manual de Usuario 45

La función se activa desde el menú.
Al iniciarse, el sistema reproduce un archivo precargado, que simula un blanco con unavelocidad y rumbo constantes acercándose a la propia embarcación. La velocidad del blancode formación corresponde a la del archivo precargado, y el usuario no puede modificarla. Losvalores CPA y TCPA dependen de la velocidad del blanco simulado y de la velocidad de lapropia embarcación.
A lo largo de la sección inferior de la pantalla, se mostrará una S parpadeante siempre que lafunción esté activa para avisar de que la simulación de formación se está ejecutando.
Es posible realizar todas las operaciones de seguimiento en el blanco simulado.
El sistema prueba automáticamente los valores CPA y TCPA del blanco de formación. Si elsoftware de seguimiento no funciona correctamente, se muestran alertas:
• CPA de blanco de formación fuera de rango: si la diferencia entre el CPA teórico y delblanco mostrado es mayor que 0,5 nm
• TCPA de blanco de formación fuera de rango: si la diferencia entre el TCPA teórico y delblanco mostrado es mayor que 30 seg.
El radar volverá a funcionar en modo predeterminado tan pronto como la opción deformación se desactive en el menú.
46 Blancos | R5000 Manual de Usuario

Herramientas de navegación
Zonas de seguimientoLa función de zonas de seguimiento permite la adquisición automática de blancos de radar yAIS cuando entran en una zona definida por el usuario por delante o alrededor de laembarcación.
Se pueden definir dos zonas de seguimiento, cada una con valores individuales.
Cuando un blanco entre en una zona, se considerará automáticamente como seguro opeligroso en función de los ajustes CPA/TCPA.
Hay dos tipos de zonas de seguimiento disponibles.
Zona de guardaCuando un blanco entra en una zona de guarda, sucede lo siguiente:
• los blancos de radar se adquieren y los blancos AIS se activan• se activan advertencias sobre nuevos blancos y sobre los blancos ya presentes en la zona• el icono de blancos se vuelve rojo y parpadea
Cuando la advertencia sobre nuevo blanco se confirma, el icono deja de parpadear. El iconopermanecerá en rojo hasta que el blanco salga de la zona de guarda.
El usuario define el color de la línea de borde de una zona de guarda.
Zona de adquisición automáticaCuando un blanco entra en una zona de adquisición automática, sucede lo siguiente:
• los blancos de radar se adquieren y los blancos AIS se activan• se activa una advertencia sobre el nuevo blanco• el icono de blancos se vuelve rojo y parpadea
Cuando se confirma la advertencia, el blanco cambia a un icono de blanco básico, y el colordepende de su estado (seguro o peligroso).
La línea del borde de una zona de adquisición automática es blanca.
Definición de una zona de seguimiento
1 Active la zona de seguimiento que desee definir.• Las líneas de zona de seguimiento se muestran en el PPI del radar.
2 Seleccione la opción de ajuste.• Las líneas de zona de seguimiento aparecen discontinuas para indicar que está
en modo de edición.
3 Defina las opciones de la zona de guarda:A: Escala, con respecto al centro de la embarcaciónB: ProfundidadC: Rumbo, con respecto a la demora de la embarcación o al norteD: Amplitud
9
Herramientas de navegación | R5000 Manual de Usuario 47

A
B
C
D
4 Seleccione el tipo de zona.
Ú Nota: El color de línea solo es aplicable cuando el tipo está establecido en zona deguarda. El color de línea siempre es blanco si el tipo está establecido en adquisiciónautomática.
5 Para guardar los cambios, seleccione en el menú la opción para finalizar el ajuste.
Ú Nota: Si sale del menú pulsando la tecla Salir, la zona permanece en modo de edición.Las líneas siguen apareciendo discontinuas y la zona no está activa.
Líneas paralelas de indexaciónLas líneas paralelas de indexación (PI) se utilizan para visualizar la distancia a la propiaembarcación, a otras embarcaciones o a objetos en tierra. Pueden utilizarse dos líneas deindexación para indicar un pasillo, que normalmente se utiliza para visualizar un área en laque se desea maniobrar.
Las líneas PI pueden definirse con estabilización del norte o del rumbo y con rumbo real orelativo.
• Estabilización del norte: la dirección de línea se mantiene con respecto al norte• Estabilización del rumbo: la línea gira con el rumbo de la embarcación• Rumbos reales: el rumbo paralelo de indexación se mide a partir del norte geográfico• Rumbos relativos: el rumbo paralelo de indexación se mide a partir de la línea de rumbo
Puede definir cuatro líneas PI en el sistema y se identifican con distinto color y estilo:
• PI1: línea gris continua• PI2: línea gris discontinua• PI3: línea naranja continua• PI4: línea naranja discontinua
1 2 3 4
48
Puede activar y desactivar cada una de las líneas PI de forma individual, y la posición, el rumbo y el truncamiento pueden configurarse para cada línea.
Cada línea PI puede restablecerse desde el menú principal para que sea paralela al rumbo de la propia embarcación.
Herramientas de navegación | R5000 Manual de Usuario

Ajuste de una línea PILa escala y el rumbo de cada línea PI se muestran en el submenú de líneas PI.
Puede ajustar la configuración de la línea en la opción de menú Ajustar de la líneaseleccionada. Las opciones que se describen en las siguientes secciones se encuentrandisponibles.
Ajuste de la escala y el rumbo1. Seleccione las opciones de menú de escala o rumbo
- Se muestra la barra de deslizamiento2. Gire el botón giratorio o utilice las teclas de flecha arriba/abajo para aumentar o disminuir
el valor de la barra de deslizamiento- El cambio se confirma de inmediato y se muestra en la imagen
3. Pulse la tecla Salir o la tecla de flecha a la derecha para cerrar el modo de edición
Ú Nota: El rango máximo de las líneas de rumbo es de 12 NM.
Truncar una línea PIPuede utilizar la opción de menú de truncado para ampliar y reducir una línea PI existente.Los puntos finales de la línea (A y B) se ajustan individualmente.
1. Seleccione la opción de truncarde A o B en el menú.- Se muestra la barra de deslizamiento
2. Gire el botón giratorio para ampliar o reducir la línea3. Pulse la tecla Salir para confirmar la selección
2
Función activada
2
Punto final ajustado
2
Línea truncada
Una línea permanece truncada hasta que se selecciona la opción de restaurar longitud delmenú.
A
B
2
Herramientas de navegación | R5000 Manual de Usuario 49

Alineación de línea PIUna línea PI puede ser paralela a babor o estribor de la línea de rumbo, o a babor o estriborde un EBL.
• Si la estabilización se establece en rumbo, la línea PI gira a medida que el rumbo de laembarcación cambia
• En paralelo al EBL: es una forma para establecer rápidamente el rumbo de una línea PIparalela al EBL en uso. La línea no gira si el EBL se cambia posteriormente.
Marcadores EBL/VRMLos marcadores EBL/VRM son una herramienta básica para evitar las colisiones. Se utilizanpara marcar cualquier blanco de radar fijo o móvil y medir las distancias entre dos objetos.
Por defecto, el punto de referencia de una marcador EBL/VRM se calcula en el centro de laembarcación. Es posible desplazar el punto de referencia a cualquier posición seleccionadade la imagen de radar para medir la distancia entre dos objetos en el PPI o para fijar elmarcador en un blanco.
Pueden colocarse dos EBL/VRM en la imagen de radar. Se identifican como líneas/anillosdiscontinuos con diferentes colores para distinguirlos entre ellos y de los anillos de escalafijos:
• EBM/VRM1 es de color cian• EBL/VRM2 es de color azul
La presentación de EBL se puede definir como presentación real o relativa:
• Movimiento real: la referencia es geográfica (por ejemplo, una línea costera o la posiciónactual de la propia embarcación).
• Movimiento relativo: la EBL sigue una referencia móvil (embarcación propia o un blancoen movimiento).
La anchura de la línea de los marcadores indica si el marcador está en modo de edición(líneas en negrita) o en una posición fija (líneas finas).
EBL/VRM1 OFF,función no activa
EBL/VRM1 ON,EBL en el modo de edición
EBL/VRM1 ON,VRM en el modo de edición
La ventana emergente EBL/VRMEl contenido de la ventana emergente depende del estado activo de EBL/VRM. El ejemplomuestra la ventana emergente cuando el EBL/VRM activo está en offset.
El parámetro ajustable se indica con texto azul en la tecla programable.
Desde la ventana emergente puede realizar lo siguiente:
• Alternar entre el marcador activo EBL/VRM 1 y EBL/VMR 2.• Hacer que el marcador activo esté disponible o no.• Alternar entre el ajuste de EBL y de VRM del marcador activo. También puede cambiar
entre parámetros ajustables pulsando el botón giratorio.• Establecer la presentación EBL (real o relativa).• Definir el offset del marcador activo.• Restablecer un marcador de offset para la posición de la embarcación.• Seleccionar si EBL/VRM debe bloquearse en la propia embarcación o en una posición
geográfica
Activación y desactivación del marcador EBL/VRMAl encenderse el sistema, los marcadores EBL/VRM están desactivados.
• Active el EBL/VRM 1 pulsando la tecla EBL/VRM una vez.
50 Herramientas de navegación | R5000 Manual de Usuario

• Alterne entre EBL/VRM 1 y EBL/VRM 2 en la ventana emergente de la función.• Desactive un EBL/VRM en la ventana emergente de la función.
Ajuste del marcador EBL/VRMEl texto del botón de acceso directo de EBL/VRM y el ancho de línea del marcador EBL/VRMindican qué elemento está en modo de edición.
EBL/VRM2 ON,la función no está en modo edición
EBL/VRM1 y 2 ON,EBL1 en el modo de edición
EBL/VRM1 y 2 ON,VRM1 en el modo de edición
Cuando un marcador EBL/VRM está en modo de edición, las siguientes opciones estándisponibles para ajustar el marcador:
• Utilizar las teclas de flecha o el ratón para mover la intersección EBL/VRM.• Girar el mando giratorio o la tecla izquierda del ratón/rueda de desplazamiento para
ajustar el parámetro ajustable (línea negrita y texto azul de tecla programable).• Pulsar el mando giratorio o rueda de desplazamiento del ratón para alternar entre el ajuste
EBL y VRM.
Descentrado de marcadores EBL/VRM1. Pulse la tecla EBL/VRM dos veces para que se muestre el cuadro emergente.2. Seleccione la opción Fijar Offset.
- Se cerrará la ventana emergente, y el cursor se colocará el cursor en el centro de EBL/VRM.
3. Utilice las teclas de flecha para mover el centro de EBL/VRM y, a continuación, seleccioneuna de las opciones siguientes:- Pulse la tecla Intro para fijar el marcador hasta la posición seleccionada, a continuación,
utilice las teclas de flecha para mover la intersección de EBL/VRM- Gire el botón giratorio para definir el EBL.- Pulse el botón giratorio para alternar entre EBL y VRM y, a continuación, gire el botón
giratorio o utilice las teclas de flecha para ajustar el elemento, que se puede editar.
Al pulsar la tecla Salir, se elimina el marcador EBL/VRM de la imagen del radar.
Medición de distancia y rumboHay diferentes opciones disponibles para la medición de la posición, la velocidad, latrayectoria, la distancia y el rumbo de los ecos del radar.
• Posición del cursor• Anillos de escala y escala de rumbo• EBL (líneas de rumbo electrónico) y VRM (marcadores de escala variable)
Es importante minimizar la escala para obtener la mejor precisión en la medida. En la mayoríade los casos puede utilizar una escala mayor si coloca el PPI en uno de los modos que noestán centrados. Consulte "Compensación del centro del PPI" en la página 32.
Herramientas de navegación | R5000 Manual de Usuario 51

Ú Nota: Todas las medidas realizadas con el cursor o EBL/VRM siempre hacen referencia alpunto de referencia común constante (CCRP).
Uso del cursorCuando coloque el cursor sobre un blanco, la zona de información del cursor indicará laescala y el rumbo de la embarcación hasta la posición del cursor.
Esta opción de medición ofrece una rápida y precisa medición de la distancia a un blanco.
Anillos de escala y escala de rumboLos anillos de escala y la escala de rumbo se utilizan para medir la distancia cuando senecesita una medición rápida. Esta opción de medición solo proporciona la distancia yvelocidad aproximadas de un blanco.
El alcance de la escala (A) y la distancia entre dos anillos de escala adyacentes (B) semuestran en el área de información del sistema de la imagen de radar.
Los alcances de escala, la distancia entre los anillos de escala y el número de anillos son lossiguientes:
Escala (NM) Intervalo de anillos deescala (nm)
Número de anillos deescala
1/8 (200 m) 1/40 (100 m) 1
1/4 1/20 4
1/2 1/10 4
3/4 1/4 2
1,5 1/4 5
3 1/2 5
6 1 5
12 2 5
24 4 5
36 6 5
48 8 5
64 16 3
72 12 5
Medición mediante marcadores EBL/VRMLa línea electrónica de rumbo (EBL) y el marcador de escala variable (VRM) permiten realizarmedidas rápidas de la escala y el rumbo desde su propia embarcación a un blanco, o entredos blancos en el PPI. El rumbo y la escala se muestran en el panel Marcadores (A).
Medición de la distancia desde la propia embarcación1. Pulse la tecla EBL/VRM para activar el marcador EBL/VRM seleccionado.2. Vuelva a pulsar la tecla EBL/VRM para mostrar la ventana emergente si necesita:
- Seleccione la presentación EBL (Real o Relativa).- Volver a colocar el marcador en la posición de la embarcación (si el centro del EBL/VRM
seleccionado está en offset).3. Utilice las teclas de flecha o gire el mando giratorio para mover los EBL/VRM al segundo
punto de medición.
Medición de la distancia entre dos blancos1. Pulse la tecla EBL/VRM dos veces.
- El marcador EBL/VRM seleccionado se enciende y se muestra la ventana emergente.2. Seleccione la presentación EBL (verdadera o relativa).3. Seleccione la opción Fijar Offset.
52 Herramientas de navegación | R5000 Manual de Usuario

4. Utilice las teclas de flecha para cambiar de posición el centro del marcador EBL/VRM en elblanco desde donde desee medir la distancia.
5. Pulse la tecla Intro para confirmar la posición.- El cursor se desplaza desde el centro del marcador a la intersección EBL/VRM.
6. Utilice las teclas de flecha o gire el mando giratorio para mover los EBL/VRM al segundopunto de medición.- La escala y el rumbo desde el centro de los marcadores EBL/VRM a la posición del
cursor se muestran ahora en el panel Marcadores.
Puede restablecer el centro de los marcadores EBL/VRM en la posición de la embarcaciónseleccionando la opción de restablecimiento del offset de la ventana emergente EBL/VRM.
Herramientas de navegación | R5000 Manual de Usuario 53

MapasLos mapas son herramientas de navegación gráfica, compuestas por líneas y símbolos quepueden agregarse a la imagen del radar. Los mapas se utilizan para ayudar al operador aaumentar la definición de las zonas de costa, restringidas o peligrosas.
Para obtener el máximo número de mapas, símbolos y segmentos, consulte "Especificacionestécnicas" en la página 85.
Ú Nota: La opción Mapas debe activarse para poder trabajar con los mapas.
Cuadro de diálogo de mapasEn el cuadro de diálogo de mapas, se muestran todos los mapas disponibles en la memoriatemporal de la unidad y en la memoria no volátil.
Desde el cuadro de diálogo de mapas, puede realizar las siguientes acciones:
• Importar archivos de mapa almacenados en el sistema de archivos interno de la unidad odesde una tarjeta SD (A)
• Seleccionar los mapas que se muestran (B)• Establecer la referencia de un mapa (C)• Mostrar la ventana emergente de mapas, desde donde puede crear nuevos mapas, editar,
guardar, exportar y eliminar mapas (D/E)
Referencias del mapaEl sistema incluye los siguientes tipos de mapas:
• Mapas relativos, que siguen la posición e igualan el rumbo de la propia embarcación.Todas las coordenadas del mapa relativo se almacenan como distancias desde la propiaembarcación
• Mapas geográficos. Las coordenadas de este tipo de mapas se almacenan comoposiciones geográficas y sus elementos se dibujan siempre en la misma posición absoluta.
Cuando se guarda un mapa, el sistema calcula automáticamente los detalles relativos ygeográficos de todos los elementos del mapa. Al cambiar de referencia, el cambio seconfirma inmediatamente sin necesidad de guardar el mapa.
Ú Nota: Los mapas relativos no se pueden crear ni importar si la corredera o la giroscópicano está disponible o falla.
Ú Nota: Los mapas geográficos no pueden crearse ni importarse si el EPFS (Sistemaelectrónico de fijación de posición) o la giroscópica no está disponible o falla. No sepuede mostrar un mapa geográfico si el barco está demasiado lejos del área del mapa.
10
54 Mapas | R5000 Manual de Usuario

Colores y símbolos del mapaLas líneas y los símbolos del mapa pueden presentarse en diferentes colores.
Están disponibles los siguientes símbolos de mapa:
Símbolo Descripción Sím
bolo Descripción Símbolo Descripción
Boya norte Área de precaución Flecha oeste
Boya sur D Profundidad del área Flecha noroeste
Boya este Área vacía Iniciar llamada
Boya oeste ? Área desconocida Iniciar recordatorio
Boya puerto lateral Flecha norte Otan 1
Boya estribor lateral Flecha noreste Otan 2
Boya especial Flecha este Otan 3
Boya peligro Flecha sureste Otan 4
Boya seguridad Flecha sur Otan 5
? Boya desconocido Flecha suroeste Otan 6
Creación de un nuevo mapa
Cuando la opción Crear mapa está seleccionada, se guarda inmediatamente un nuevo mapaen la memoria temporal de la unidad.
El nombre del mapa lo establece el sistema y la visibilidad está establecida en activada.
Ú Nota: El nuevo mapa no incluye contenido en esta fase.
• Seleccione el nombre del mapa para que se muestre el teclado si desea dar el mapa unnombre específico
• Establezca la referencia del mapa
Mapas | R5000 Manual de Usuario 55

• Seleccione la opción de menú para introducir detalles de mapas. Consulte "Modificación de unmapa" en la página 56.
Guardado de un mapaLos mapas nuevos y editados se guardan por defecto en la memoria temporal de la unidad.Los mapas deben guardarse para que estén disponibles en la unidad después de reiniciarla.
Modificación de un mapaCualquier detalle de un mapa se puede agregar o editar en el menú emergente de mapas.
Cuando se selecciona una opción de edición en el menú emergente, el sistema cambia almodo de edición de mapas. Esto se indica en el PPI.
Para salir del modo de edición de mapas:
• Pulse la tecla Salir
Ú Nota: Al salir del modo de edición, los cambios se guardan automáticamenteúnicamente en la memoria temporal. Los mapas deben guardarse para que esténdisponibles en la unidad después de reiniciarla.
Editar detalles del mapaLos detalles de los mapas se añaden o editan en el menú de edición de mapas. El contenidodel menú de edición de mapas depende de dónde esté situado el cursor:
Ningún detalle de mapa enla posición del cursor
Línea de mapa en la posicióndel cursor
Vértice en la posición delcursor
Símbolo en la posición delcursor
1. Coloque el cursor donde desee agregar o editar un detalle del mapa2. Pulse la tecla Intro o el botón derecho del ratón para mostrar el menú de edición de
mapas y, a continuación, seleccione la opción de edición3. Siga colocando el cursor y seleccionando la opción de edición hasta que se hayan hecho
todos los cambios4. Pulse la tecla Salir para cerrar el modo de edición
56 Mapas | R5000 Manual de Usuario

Rotación de un mapaAl seleccionar la opción de rotación, el cursor se coloca en centro del PPI.
• Utilice las teclas de flecha para mover el cursor y rotar el mapa alrededor de la posición dela embarcación
• Pulse la tecla Salir para cerrar el modo de edición
Cambio de la posición de un mapaCuando la opción de cambio está seleccionada, el cursor se sitúa en el centro del PPI y elmapa queda anclado al cursor.
• Use las teclas de dirección para mover el cursor y cambiar la posición del mapa• Pulse la tecla Salir para cerrar el modo de edición
Exportación de mapasLos mapas que aparecen en el cuadro de diálogo Mapas pueden exportarse individualmentey utilizarse en otras unidades de radar compatibles.
Los mapas guardados también pueden copiarse desde la memoria interna en una tarjeta dememoria con el sistema de gestión de archivos.
Importación de mapasLos mapas compatibles creados en otras unidades se pueden importar en el sistema. Losmapas importados se añaden a la memoria no volátil de las unidades y los mapas se añadena la lista de mapas cargados.
Ú Nota: Los mapas que aparecen en el diálogo de mapas del radar se pueden exportarindividualmente a una memoria USB para su uso en otros equipos de radar compatibleso para su edición en una herramienta de mapas para PC. La herramienta de edición demapas para PC es una aplicación disponible en System Builder de Navico. Si es necesario,póngase en contacto con su concesionario para solicitar una copia del archivo deinstalación.
Mapas | R5000 Manual de Usuario 57

58 Mapas | R5000 Manual de Usuario

Personalización de los ajustes de control deradarPuede guardar una serie de ajustes de control en el sistema. Esta función se utiliza paradefinir varias condiciones y preferencias del usuario.
Para recuperar los ajustes de control predeterminados, consulte "Aplicación de los ajustes de controlpor defecto" en la página 24.
Personalización de la tabla de ajustes de control de radarLas siguientes funciones se incluyen al guardar un ajuste de usuario:
Función Ajuste por defecto
Banda Banda X
Ganancia, Lluvia y Mar Automática
Sintonización Automática
Escala 6 nm
Anillos de escala fijados Off (Desactivado)
VRM Un VRM activado a 0,25 NM
EBL Desactivado o última configuración
Líneas paralelas de indexación Desactivado o última configuración
Modo de visualización del PPI Movimiento real, norte arriba
Estabilización mar/tierra Tierra (SOG, COG)
Fuera de centrado Vista avanzada
Opción Estelas de Blancos Activado, 6 minutos (igual que el vector)
Posición pasada Off (Desactivado)
Seguimiento de blancos de radar Continuado
Modo vectorial Relativo
Tiempo del vector 6 minutos
Visualización gráfica de blancos AISnotificados
On (Activado)
Radar y función de blancos AIS Asociación activada
Alarmas operativas (excepto advertencias decolisión)
Off (Desactivado)
Aviso de colisión Activado (límites CPS 2 NM, TCPA 12minutos)
11
Personalización de los ajustes de control de radar | R5000 Manual de Usuario 59

Función Ajuste por defecto
Visualización de mapas, líneas denavegación y rutas
Última configuración
60 Personalización de los ajustes de control de radar | R5000 Manual de Usuario

Opciones avanzadas
Rechazo de interferencias de radarIR (rechazo de interferencias) sirve para eliminar ecos de rastreo secundarios de blancosdistantes e interferencias de unidades de radar que operan en la misma banda de frecuencia.
Cuando IR está activado, se activa el escalonamiento de pulsos del transceptor. Al activarse, laFRP del transceptor cambia ligeramente en cada barrido. Por ello, las interferencias en espiraly los ecos de rastreo secundarios se dividen por escala de un barrido a otro. El procesamientoIR borra todos los ecos que se encuentran en la misma escala si no están presentes en cadabarrido.
IR se debe elegir de acuerdo con el entorno en que se encuentra la embarcación:
• IR desactivado cuando se precisa la máxima señal del receptor• IR activado cuando la interferencia o los ecos de rastreo secundarios perturban la imagen
del radar.
Para detectar los blancos débiles, el rechazo de interferencias debe fijarse en desactivadocuando no exista interferencia.
Rechazo de ruidoEl control Rechazo de ruido establece la cantidad de ruido que filtra el radar. La visibilidad deblancos incrementa en grandes escalas si este control se establece en Alto o Bajo, peroprovoca una disminución de la calidad de la diferenciación del blanco.
Opción Resaltar BlancosEl control Resaltar blancos aumenta la longitud de pulso y reduce el ancho de banda delradar para que los blancos parezcan más grandes y aumenta la sensibilidad del radar.
Expansión de blancosLa expansión de blancos aumenta la longitud de los blancos detectados, lo que facilita suvisión.
Escaneo rápidoCambia la velocidad de rotación de la antena del radar de 20 RPM en el modo defuncionamiento estándar a 40 RPM en modo de barrido rápido. Esta opción ofreceactualizaciones de blancos más rápidas.
Ú Nota: La opción de escaneo rápido solo está disponible para antenas de banda X de3,7 m (9 pies) y 2,7 m (6 pies) y para sensores de radar HSC.
12
Opciones avanzadas | R5000 Manual de Usuario 61

Maniobra de pruebaLa opción de maniobra de prueba sirve para evitar situaciones peligrosas al planificar unamaniobra en áreas de tráfico intenso.
La maniobra de prueba presenta una vista gráfica de una maniobra simulada, que incluye laposición prevista de la propia embarcación en relación con los blancos detectados y losblancos AIS.
Ú Nota: La información de maniobra de prueba más fidedigna está disponible al utilizar elradar en modo de movimiento relativo y con estabilización de fuente de velocidadestablecida en modo de mar. Consulte "Movimiento relativo" en la página 32 y "Selección de fuentede velocidad" en la página 22.
Simbología de maniobras de pruebaAl iniciarse la maniobra de prueba, el símbolo de prueba (A) y el tiempo de cuenta atrás (B)se agregan a la imagen del radar. Un panel de maniobras de prueba (C) se agrega al panel deradar.
La indicación de blancos es conforme a los ajustes de visualización del radar y al modo deestabilización de la velocidad.
Los blancos se indican con la posición real. Seleccione un blanco para ver su posiciónprevista (E). La línea de movimiento estimada (EML) se agrega a continuación entre las dosposiciones del blanco.
Si elige la posición prevista de un blanco, el nombre del blanco y la posición prevista seañaden al panel (D).
Indicación de una maniobra peligrosaLas indicaciones siguientes sirven para indicar que la posición de un blanco es peligrosa alfinal de la maniobra de prueba:
• símbolo del blanco parpadeante en rojo• color amarillo en el panel de maniobra de prueba• alarma relevante
13
62 Maniobra de prueba | R5000 Manual de Usuario

Inicio y detención de la maniobra de pruebaPuede iniciar la maniobra de prueba desde el menú una vez que se han definido la velocidado rumbo finales.
Puede detener la maniobra de prueba en cualquier momento. La función se detendráautomáticamente cuando haya transcurrido el tiempo de retardo.
Cambio manual de los ajustes de la maniobra de pruebaLos ajustes de maniobra de prueba predeterminados se definen durante la puesta en serviciode la embarcación.
El menú de ajustes de la maniobra de prueba permanece abierto una vez iniciada la función.Si una maniobra se considera peligrosa, puede ajustar la velocidad o el rumbo para ver cómoes posible evitar una situación peligrosa.
Maniobra de prueba | R5000 Manual de Usuario 63

Mantenimiento
GeneralEl sistema requiere muy poco mantenimiento. El operador debe inspeccionardetenidamente el equipo y observar cualquier posible anomalía, como la integridad delequipo, la presencia de óxido, pintura desprendida y tornillos flojos. Mensualmente, eloperador debe limpiar el equipo y eliminar el polvo, cenizas y grasa con un paño suave dealgodón y alcohol. No debe utilizarse disolvente para limpiar las piezas de plástico.
Para obtener más información sobre piezas de repuesto, consulte el manual de instalación,que está disponible por separado.
Monitor de rendimientoLa función Monitor de rendimiento sirve para comprobar el rendimiento del transceptor, laguía de ondas y la antena.
Antes de iniciar la función, debe establecer la escala en 24 nm, sintonizar el radar y ajustar elcontrol de ganancia a aproximadamente el 90%.
En este estado, debería aparecer un anillo de ruido intensificado, situado aproximadamente a24 nm. La distancia al anillo desde del centro es directamente proporcional a la potencia desalida de TXRX transmitida. Cuando la potencia máxima del magnetrón se reduzca en 10 dB,la distancia del anillo se reducirá a aproximadamente 12 nm.
El monitor de rendimiento se inicia desde el menú principal.
Al anillo del monitor de rendimiento le debe faltar un sector angular de 60° a 80°. La ausenciade este sector se debe al haz de RF transmitido por la antena. Cualquier degradación depotencia de RF entre el magnetrón y la salida de antena se traduce en una interrupción delanillo angular menor. Cuando el sector angular se reduce por debajo de 30°, es necesariorevisar la sección de antena. El ancho (grosor) del anillo es proporcional al estado desintonización. La anchura del anillo en un radar bien sintonizado será de aproximadamente2 nm. La intensidad del anillo (diferencia entre el ruido de fondo y el ruido del anillo) indica elfactor de ruido del receptor. Si la degradación del factor de ruido del receptor es mayor que10 dB, no es posible distinguir el anillo del monitor de rendimiento del ruido de fondo.
Ú Nota: Si el borrado de sectores está activado, al anillo del monitor de rendimiento lefaltarán sectores en las áreas de borrado.
14
64 Mantenimiento | R5000 Manual de Usuario

Datos del radarEl cuadro de diálogo Datos del radar muestra el estado de los componentes vitales del radar.
El sistema muestra una alerta cuando es necesario sustituir el magnetrón.
Para los procedimientos de sustitución, consulte el manual de comisionado independiente.
Mantenimiento | R5000 Manual de Usuario 65

El sistema de alertasMientras está en funcionamiento, el sistema comprueba continuamente si existen fallos osituaciones peligrosas.
Tipo de alarmasHay 3 tipos de alarmas en el sistema:
• Alarmas: se trata de las alarmas con mayor prioridad del sistema, se activan cuando seproduce una situación que puede tener como resultado una colisión, o si se producencondiciones con efecto crítico sobre la capacidad y el rendimiento del sistema. Unaalarma va acompañada por una señal acústica, y el icono de alarma parpadea hasta que sereconozca la alarma.
• Advertencias: se trata de alertas de baja prioridad que advierten de condiciones quepodrían resultar en una respuesta no deseada del sistema o en una avería si no se tomanmedidas. Una advertencia va acompañada de una señal acústica (2 señales breves que serepiten como advertencia si no se reconoce). El icono de advertencia parpadea hasta quese reconoce la advertencia.
• Precauciones: se trata de información sobre objetos peligrosos a los que hay que prestaratención. Los avisos de precaución no tienen señal sonora.
Categorías de alertaCada alerta se identifica (además de por el tipo de alerta) con una categoría de alerta. Lacategoría de una alerta decide la acción necesaria para rectificar dicha alerta.
Categoría
Acción
A
Las alertas de categoría A solo pueden reconocerse en la estación de control delradar.En general, todas las alarmas locales generadas por una estación de trabajo son decategoría A. Ejemplo: Alarma de blanco AIS peligroso.Para esta categoría no se permite la revaluación y se rechaza la transferencia de laresponsabilidad.
B
Las alertas de categoría B se pueden confirmar en BNWAS o BAM si estos sistemasestán conectados.Todas las alarmas globales generadas por sistemas de navegación son de categoríaB. Ejemplo: Advertencia de fallo del giroscopio.Para esta categoría el sistema concede solicitudes para la transferencia de laresponsabilidad.
Notificaciones de alertaCuando se activa una alerta, esta aparece en el panel Alertas.
Las alertas se muestran con orden de clasificación. El orden de clasificación se estableceprimero por estado (es decir, las no reconocidas van antes que las rectificadas, y lasrectificadas antes que las reconocidas), después por gravedad (es decir, las alarmas van antesque las precauciones) y finalmente por el tiempo.
Las alertas y las advertencias tienen estados diferentes:
• Activa: sin reconocer, sin silenciar.• Activa: sin reconocer, silenciada.• Activa: se ha confirmado su recepción.• Activa: responsabilidad transferida a otra estación de trabajo.• Rectificada: no se ha confirmado.
15
66
Cuando una alerta se ha corregido y confirmado, desaparece del panel de alertas.
Las precauciones no se pueden confirmar, y desaparecen de la lista de alertas cuando la condición se rectifica.
El sistema de alertas | R5000 Manual de Usuario

Se puede agrupar y mostrar un número de alertas relacionadas en el panel Alertas como unúnico elemento con el símbolo de agregar (+) junto al símbolo de la alerta. El símbolo deagregación muestra el estado como no reconocido si al menos una alerta de la listaagregada está sin reconocer. Cada alerta de la lista debe reconocerse por separado.
Las alertas de blancos AIS y TT solo se agrupan si se activa la opción de agregación.
La tabla siguiente muestra los iconos de alerta y el comportamiento en función del estado dealerta.
Tipo de alerta Icono Estado Indicación
Alerta
Activa: sin reconocer,sin silenciar.
• Símbolointermitente ytexto descriptivo
• Señal sonora
Activa: sin reconocer,silenciada.
• Símbolointermitente ytexto descriptivo
• Sin señal sonora
Activa: se haconfirmado surecepción.
• Símbolo fijo y textodescriptivo
• Sin señal sonora
Activa:responsabilidadtransferida
• Símbolo fijo y textodescriptivo
• Sin señal sonora
Rectificada: no se haconfirmado.
• Símbolointermitente ytexto descriptivo
• Sin señal sonora
Advertencia
Activa: sin reconocer,sin silenciar.
• Símbolointermitente ytexto descriptivo
• Señal sonora
Activa: sin reconocer,silenciada.
• Símbolointermitente ytexto descriptivo
• Sin señal sonora
Activa: se haconfirmado surecepción.
• Símbolo fijo y textodescriptivo
• Sin señal sonora
Activa:responsabilidadtransferida
• Símbolo fijo y textodescriptivo
• Sin señal sonora
Rectificada: no se haconfirmado.
• Símbolointermitente ytexto descriptivo
• Sin señal sonora
El sistema de alertas | R5000 Manual de Usuario 67

Tipo de alerta Icono Estado Indicación
Precaución Activa
• Símbolo fijo y textodescriptivo
• Sin señal sonora
68 El sistema de alertas | R5000 Manual de Usuario

Activar SirenaDe forma predeterminada, la señal de alerta sonora está activada.
Puede desactivar la señal sonora cuando el modo de servicio está activo, pero se activará otravez al desactivar el modo de servicio.
Cuadro de diálogo AlertasEl cuadro de diálogo Alertas incluye una lista de alertas activas junto con un listado históricode los últimos cambios de estado de alerta. Las entradas se añaden al historial cada vez quese emita, se reconozca, se rectifique o se borre una alerta.
Todas las alertas del cuadro de diálogo Alertas incluyen una indicación de hora.
Sistemas de alerta de puente externosEl sistema es compatible con la gestión de alertas en puente (BAM) y los sistemas de alarmade la guardia de navegación en puente (BNWAS).
Gestión de alertas en puente (BAM)Todas las alertas del sistema se transfieren al sistema de alertas en puente si este estáconectado al sistema.
El propio sistema solo puede reconocer una alerta generada por el sistema, como una alarmade blanco peligroso. Las alarmas globales, como la de tiempo de espera de posición o la defallo de giroscopio, pueden reconocerse tanto en la unidad de control del sistema como enel sistema de alertas en puente.
Sistemas de alarma de la guardia de navegación en puente (BNWAS, BridgeNavigational Watch Alarm Systems)Si un BNWAS está conectado al sistema, el sistema emite una sentencia EVE al BNWAScuando se produce una interacción del usuario con el sistema. La sentencia EVE reinicia deforma remota el timer del BNWAS para confirmar la actividad de la tripulación del puente.
El sistema de alertas | R5000 Manual de Usuario 69

Listado alfabético de alertasAbreviaturas del tipo de alerta:
• C: Precaución• W: Advertencia• A: Alerta
Texto dealerta Descripción Tipo Cate-
goríaID dealerta
AIS Capacity95%
El proceso/la visualización de los blancos AISestá a punto de sobrepasarse.
C B 3043
AIS Capacity Full Se ha excedido la capacidad de AIS. W A 3042
AIS FAILFallo de AIS. W B 3015
Fallo de AIS sin utilizar. W B 10194
AIS TGT in GZ Blanco AIS en zona de guarda. W A 3048
AIS TGT Lost: # Se ha perdido el blanco AIS n.º. W A 3052
BAM HBT Lost Se ha perdido el pulso de BAM. C B 10000
Dangerous AISTGT
Los valores CPA o TCPA de un blanco AISactivado son más bajos que los límitesestablecidos.
A A 3044
Dangerous TTLos valores CPA o TCPA de un blancodetectado son más bajos que los límitesestablecidos.
A A 3044
Interruptor depuerta abierto
La carcasa del radar está abierta debido atareas de mantenimiento. El radar no estáoperativo.
A A 3015
FALLO DE EPFSFallo de fuente de posición sin utilizar. C B 10194
Fallo de fuente de posición. W B 3015
Geodetic DatumFAIL
Fallo de datos geodésicos. W B 3015
GYRO FAILFallo de giroscopio. W B 3015
Fallo de giroscopio sin utilizar. C B 10194
FALLO de líneade rumbo
Fallo de la línea de rumbo. W B 3015
Magnetron EOLSe ha alcanzado el final de la vida útil delmagnetrón.
C B 10195
POSN Invalid Posición no válida. W B 3015
POSNUnavailable
Posición no disponible. W B 3015
FALLO deantena de radar
Fallo de antena de radar. W B 3015
RADAR FAIL Fallo de radar TXRX. W B 3015
REF TGT Lost Blanco de referencia perdido. W A 3052
Interruptor deseguridadabierto.
El interruptor de seguridad está abiertodebido a tareas de mantenimiento. El radarno está operativo.
A A 3015
SOG FAILFallo de velocidad sobre el fondo no usada. C B 10194
Fallo de velocidad sobre el fondo. W B 3015
Speed LOG FAILFallo del registro de velocidad sin usar. C B 10194
Fallo del registro de velocidad. W B 3015
70 El sistema de alertas | R5000 Manual de Usuario

Texto dealerta Descripción Tipo Cate-
goríaID dealerta
SPD Long. AxisFAIL
Fallo de datos de velocidad del ejelongitudinal.
W B 3015
SPD Tran. AxisFAIL
Fallo de datos de velocidad del ejetransversal.
W B 3015
STW FAIL Fallo de velocidad en el agua. W B 3015
TGT in GZN. º de blanco detectado en la zona deguarda de la embarcación.
W A 3048
Train TGT CPAFAIL
CPA de blanco de formación fuera dealcance.
W A 3044
Train TGT TCPAFAIL
TCPA de blanco de formación fuera dealcance.
W A 3044
FALLO deactivación
Fallo de activación. W B 3015
TT Capacity 95%El proceso o la visualización de los blancosdetectados está a punto de sobrepasarse.
C B 3043
TT Capacity FullSe ha excedido la capacidad de blancosdetectados.
W A 3042
TT Lost: # Se ha perdido el blanco detectado n.º. W A 3052
UTC Data FAIL Fallo de datos UTC. W B 3015
FALLO de vídeode radar
Fallo de vídeo de radar. W B 3015
Modos de funcionamiento provisionalLa siguiente tabla muestra las posibles categorías de fallos, y qué operaciones puedenrealizarse o no cuando se produce el error.
Fallo Posible alarma Alternativaprovisional
Función inhabilitada
Fallo de rumbo GYRO FAIL
Cambioautomático amodo rumboarriba demovimientorelativo
• AIS• Adquisición/seguimiento de
blancos de radar• Mapas referenciados
geográficamente• Orientación Norte arriba/Curso
arriba• Presentación de movimiento
verdadero• Estelas verdaderas
Fallo develocidad en elagua
Speed LOG FAILSTW FAIL
Es posible definirvelocidadmanual
• AIS
Fallo de rumbo yvelocidad sobretierra
Speed LOG FAILSOG FAILEPFS speed FAIL
Cambioautomático amovimientorelativo, vectoresrelativos yestabilizacióndel mar
• Vectores reales• Mapas referenciados
geográficamente• Presentación de movimiento
verdadero• Estelas verdaderas
El sistema de alertas | R5000 Manual de Usuario 71

Fallo Posible alarma Alternativaprovisional
Función inhabilitada
Fallo en laposición de laentrada
POSN InvalidPOSNUnavailable
• AIS• Mapas referenciados
geográficamente
Fallo de entradade vídeo deradar
RADAR FAIL
Es posiblemostrarinformación deblanco enfunción de losdatos AIS
• Adquisición/seguimiento deblancos de radar
• Movimiento relativo/Estelasverdaderas
• Presentación de vídeo de radar
Fallo en laentrada AIS
AIS FAIL • AIS
72 El sistema de alertas | R5000 Manual de Usuario

Descripción general de menús
Menú Principal
> Acceso a submenú
... Abrir cuadro de diálogo
Nivel 1 Nivel 2
Fuente de radar
Vista > Trials & PAST POSN >
Orientación
Modo de movimiento
Restablecer offset
Offset >
Vectores >
Rumbo del cursor
Brillo >
Gráfico de la embarcación propia
Mapas
Maniobra de prueba > Velocidad actual
Velocidad final
Derrota actual
Derrota final
Régimen de giro
Dirección
Retraso >
Iniciar
Reiniciar
Aplicar ajustes por defecto
Ajustes del usuario > Guardar ajustes >
Cargar ajustes >
TT/AIS >
Cancelar todo
Cancelar blanco seleccionado
Advertencia de pérdida
Alcance
Límite CPA/TCPA...
AIS >
Datos...
ASSOC blanco >
Formación
Fuente de velocidad > Estabilización
Origen
Velocidad manual
Deriva/Fijar
16
Descripción general de menús | R5000 Manual de Usuario 73

Nivel 1 Nivel 2
Deriva
Set (Configurar)
Símbolos PPI > Líneas PI >
Mapas...
Anillos de escala
Línea de rumbo
Apagar gráfico superpuesto
Restablecer RMB PI1
Restablecer RMB PI2
Restablecer RMB PI3
Restablecer RMB PI4
Zonas Zona 1
Adjust (Ajuste)
Tipo
Zona 2
Adjust (Ajuste)
Tipo
PM
Avanzado > IR
Rechazo de ruido
Opción Resaltar Blancos
Expansión de blancos
Modo de escaneo rápido
Ajustes
Menú de ajustes
> Acceso a submenú
... Abrir cuadro de diálogo
Nivel 1 Nivel 2
Control de acceso Modo de servicio
Introducir contraseña...
Sistema Sonido teclas
Hora...
Control remoto
Volver a valores por defecto...
Archivos...
Avanzado...
Reiniciar dispositivo
Registro...
Acerca de
Radar Instalación
Paleta de vídeo del radar
74 Descripción general de menús | R5000 Manual de Usuario

Nivel 1 Nivel 2
paleta de estelas de blancos
Datos del radar
PPI ampliado
Posición Satélites
Ignorar calidad de posición
Alertas Activar Sirena
Alertas...
Alarma de prueba
Unidades Pequeña distancia
Ratio de giro de la propia embarcación
Red Info
Control de unidades de visualización...
Fuentes...
Tabla de prioridades...
Lista de dispositivos
Diagnósticos
NMEA 0183 >
Barco Ajustes...
MMSI
Datos de AIS de la propia embarcación
Maniobra de prueba
Simulador Simular
Modo de demostración
Archivos...
Avanzado...
Descripción general de menús | R5000 Manual de Usuario 75
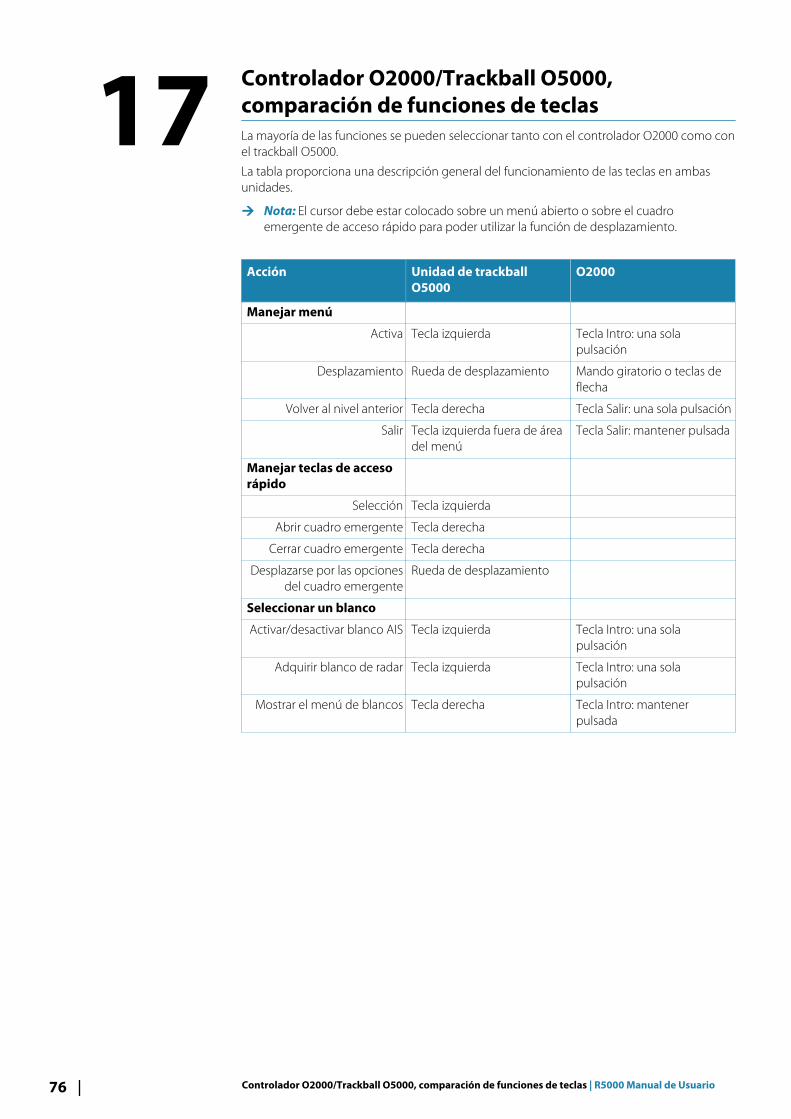
Controlador O2000/Trackball O5000,comparación de funciones de teclasLa mayoría de las funciones se pueden seleccionar tanto con el controlador O2000 como conel trackball O5000.
La tabla proporciona una descripción general del funcionamiento de las teclas en ambasunidades.
Ú Nota: El cursor debe estar colocado sobre un menú abierto o sobre el cuadroemergente de acceso rápido para poder utilizar la función de desplazamiento.
Acción Unidad de trackballO5000
O2000
Manejar menú
Activa Tecla izquierda Tecla Intro: una solapulsación
Desplazamiento Rueda de desplazamiento Mando giratorio o teclas deflecha
Volver al nivel anterior Tecla derecha Tecla Salir: una sola pulsación
Salir Tecla izquierda fuera de áreadel menú
Tecla Salir: mantener pulsada
Manejar teclas de accesorápido
Selección Tecla izquierda
Abrir cuadro emergente Tecla derecha
Cerrar cuadro emergente Tecla derecha
Desplazarse por las opcionesdel cuadro emergente
Rueda de desplazamiento
Seleccionar un blanco
Activar/desactivar blanco AIS Tecla izquierda Tecla Intro: una solapulsación
Adquirir blanco de radar Tecla izquierda Tecla Intro: una solapulsación
Mostrar el menú de blancos Tecla derecha Tecla Intro: mantenerpulsada
17
76 Controlador O2000/Trackball O5000, comparación de funciones de teclas | R5000 Manual de Usuario

Símbolos de blancosEsta sección muestra los símbolos de blancos que se utilizan en este sistema.
Símbolo Descripción
Estación base de AIS
AIS de aeronave SAR
AIS de embarcación SAR
SART AIS (Transmisor de búsqueda y salvamento AIS)
Blanco AIS: peligroso, indicado con una línea gruesa de color rojo.El símbolo parpadea hasta que el operador confirma la alarma delblanco
Blanco AIS: perdido, indicado con líneas cruzadas centradas en elsímbolo del blanco. El símbolo se encuentra en la última posiciónrecibida del blanco
Blanco AIS: seleccionado, indicado con un cuadrado (líneadiscontinua) alrededor del símbolo del blanco
Blanco AIS: inactivo, alineado con la información de rumborecibida o con la información de COG si el rumbo no está disponible
Blanco AIS, activado: contornos a escala real
Blanco AIS con línea de rumbo y SOG/COG (línea discontinua) ycon indicación de sentido de giro
Blanco AIS con línea de rumbo, SOG/COG (línea discontinua) ytrack
Blanco asociado: uso de los datos AIS
Blanco asociado: uso de los datos de radar
AIS AtoN físico: forma básica (ayudas a la navegación AIS)
AIS AtoN físico: marca cardinal del este
AIS AtoN físico: marca de naufragio de emergencia
18
Símbolos de blancos | R5000 Manual de Usuario 77

Símbolo Descripción
AIS AtoN físico: peligro aislado
AIS AtoN físico: marca cardinal del norte
+
Off Posn
AIS AtoN físico: posición Off (Apagado)
AIS AtoN físico: marca de babor
Racon err
AIS AtoN físico: error de racon
AIS AtoN físico: racon
AIS AtoN físico: aguas seguras
AIS AtoN físico: marca cardinal del sur
AIS AtoN físico: marca especial
AIS AtoN físico: marca de estribor
Unlit
AIS AtoN físico: apagado (fallo de las luces)
AIS AtoN físico: marca cardinal del oeste
Blanco de radar: peligroso, indicado con una línea gruesa decolor rojo. El símbolo parpadea hasta que el operador confirma laalarma del blanco. Permanecerá rojo hasta que el sistema ya no lodefina como un blanco peligroso
Blanco de radar: en estado de adquisición, indicado como uncírculo discontinuo centrado en la posición de adquisición delblanco
Blanco de radar: perdido, indicado con líneas cruzadas centradasen el símbolo del blanco. El símbolo se encuentra en la últimaposición recibida del blanco
Blanco de radar: seleccionado, indicado con un cuadrado (líneadiscontinua) alrededor del símbolo del blanco
Blanco de radar: detectado, con vector de velocidad
78 Símbolos de blancos | R5000 Manual de Usuario

Símbolo Descripción
18Blanco de radar con posición pasada y vector de velocidad
RBlanco de referencia
SS Estación de señal
+ AIS AtoN virtual, forma básica
+ AIS AtoN virtual: marca cardinal del este
+ AIS AtoN virtual: marca de naufragio de emergencia
+ AIS AtoN virtual: peligro aislado
+ AIS AtoN virtual: marca cardinal del norte
+ AIS AtoN virtual: marca de babor
+ AIS AtoN virtual: aguas seguras
+ AIS AtoN virtual: marca cardinal del sur
+ AIS AtoN virtual: marca especial
+ AIS AtoN virtual: marca de estribor
+ AIS AtoN virtual: marca cardinal del oeste
Missing
Sin AIS AtoN virtual
Símbolos de blancos | R5000 Manual de Usuario 79

Términos y abreviaturas
ACK Confirmar
ACQ Adquirir
ACT Activa
ADJ Ajustar, ajuste
ALT Altitud
AIS Sistema de identificación automática
AM Modulación de amplitud
ANCH Guardia de puerto
ANT Antena
AP Piloto automático
APR Abril
ARPA Ayuda de punteo automático de radar
ATON Ayuda a la navegación
AUD Acústico
Automático Automática
AZ Zona de adquisición
AZI Indicador de azimut
BCR Escala de cruce de proa
BCT Tiempo de cruce de proa
BI Imagen binaria
BKGND Fondo
BMD Motor con escobillas- controlador sin escobillas para bandaS
BRG Rumbo
BRILL Brillo de pantalla
BWW Rumbo al próximo waypoint
C UP Rumbo arriba
CCRP Punto de referencia común constante
CENT Centro
CNCL Cancelar
COG Rumbo sobre el fondo
CONT Contraste
CPA Punto de aproximación más cercano
CPU Unidad de procesamiento central
CRS Curso
CTS Rumbo a gobernar
CURS Cursor
DAY/NT Día/Noche
DECR Reducir
DEG Grados
DEL Eliminar
DGPS GPS diferencial
DISP pantalla
19
80 Términos y abreviaturas | R5000 Manual de Usuario

DIST Distancia
DPTH Profundidad
DR Navegación por estima
DSC Llamada digital selectiva
DW Aguas profundas
EBL Línea de rumbo electrónica
ECDIS Sistema de visualización de cartas electrónicas einformación
ECS Sistema de carta electrónica
EGNOS Sistema de superposición de navegación geoestacionariaeuropeo
ENCSOG Carta de navegación automática
EP Posición estimada
EPFS Sistema electrónico de fijación de posición
EPIRB Posición de emergencia indicando radiobalizas
EQUIP Equipo
ERBL Escala automática y línea de rumbo
ETA Hora estimada de llegada
ETD Hora estimada de salida
EZ Zona de exclusión
FK Tecla de función del usuario
FMCW Onda Continua de Frecuencia Modulada
FS Escaneo rápido
FWD Hacia delante
GAS Sistema para evitar encallamiento
GEOG Geográfica
GLONASS Sistema global orbital de navegación por satélite
GMDSS Sistema global de emergencia y seguridad marítimos
GND TRK Track de tierra
GNDSTAB Conexión a tierra estabilizada
GNSS Sistema global de navegación por satélite
GPS Sistema de posicionamiento global
GZ Zona de guarda
H UP Rumbo arriba
HDG Encabezado
HL Línea de rumbo
HR Horas
I/O Entrada/salida
IBS Sistema de puente integrado
ID Identificación
IN Entrada
INIT Inicialización
INS Sistema integrado de navegación
IR Rechazo de interferencia
IRCS Sistema de comunicación radio integrado
ISW Interswitch
Términos y abreviaturas | R5000 Manual de Usuario 81

Km Kilómetro
KN Nudos
LBL Etiqueta
LIM Límite
LOST TGT Blanco perdido
LP Pulso largo
LWE Lightweight Ethernet
m Metros
MIN Mínimo
MIN Minutos
MKR Marcador
MOB Hombre al agua
MP Pulso medio
MSTR Maestro
N UP Norte arriba
NAV (Navegación) Navegación
NC Normalmente cerrado
NF Función de red
NLT No menos de
NM Milla náutica
NMT No más de
NR Rechazo de ruido
NUC No bajo mando
OFF CENT Fuera de centro
OFFTRK Fuera de rastreo
ONF Otra función de red
OS Embarcación propia
OSD Datos de la embarcación propia
OUT Salida
PAD Área de peligro prevista
PAST POSN Posición pasada
PCB Placa de circuito impreso
PI Línea paralela de indexación
PL Duración del impulso
PM Monitor de rendimiento
POSN Posición
PPC Punto de colisión previsto
PPI Plano indicador de posición
PRF Frecuencia de repetición de pulso
PWR PWR
R BRG Rumbo relativo
R CRS Curso relativo
R VECT Vector relativo
RAD Radio
RAIN Filtro anti ruido de lluvia
82 Términos y abreviaturas | R5000 Manual de Usuario

RCDS Sistema de visualización de cartas raster
REF Referencia de eco
REF SOG Velocidad de referencia de eco
REL o R Relativo
RM Movimiento relativo
RM (R) Movimiento relativo (estelas relativas)
RM (T) Movimiento relativo (estelas reales)
RNC Carta de navegación raster
RNG Alcance
ROT Ratio de giro
RR Anillos de Escala
RSD Datos del sistema de radar
RTE Ruta
RX Receptor
SAF CON Contorno de seguridad
SAR Búsqueda y rescate
SC/SC Barrido a barrido
SDME Equipo de medición de velocidad y distancia
SEA Filtro anti ruido de mar
SEL Selecciona
SENC Carta de navegación electrónica del sistema
SFI Identificador de función del sistema
SNGF Función de pasarela de red a serie
SNR Relación señal/ruido
SOG Velocidad sobre el fondo
SP Pulso corto
SPD Velocidad
SRNC Sistema de navegación raster
SRT Transceptor de radar pequeño
STAB Estabilizado
STBD Estribor
STC Control del intervalo de sensibilidad
STW Velocidad en el agua.
T BRG Rumbo real
T CRS Curso real
T SPD Velocidad real
T VECT Vector real
TB Resaltar blancos
TCPA Tiempo hasta el punto de aproximación más cercano
TE Expandir blanco
TGT Blanco
Tgt exp Opción Expansión de Blancos
Th Umbral de blanco
TM Movimiento real
TPR Transpondedor
Términos y abreviaturas | R5000 Manual de Usuario 83

TRIAL Maniobra de prueba
TRIG Activar pulso
TRK Track
TRKG Seguimiento
Seguimiento Tiempo restante
TS Separación de blancos
TT Blanco en seguimiento
TWOL Tiempo para la línea de inicio de maniobra
TX Transmitir, transmisor
TX/RX Transceptor
UDP Protocolo de datos de usuario
UPS Sistema de alimentación ininterrumpida
VRM Marcador de escala variable
VTS Servicios de tráfico de embarcaciones
WOL Línea de inicio de maniobra
WOP Punto de inicio de maniobra
84 Términos y abreviaturas | R5000 Manual de Usuario

Especificaciones técnicasPuede consultar la lista de especificaciones más actualizada en:
• www.navico-commercial.com
Ú Nota: Las especificaciones de hardware para cada una de las unidades incluidas en elsistema se encuentran en la documentación de las unidades.
General
Descripción
Sistemas de radar de banda X y Shomologados a bordo de embarcacionesCAT 1, CAT 2 y CAT 3 SOLAS, incluidas navesde alta velocidad
Estándares • OMI-Resolución A.278 (VIII), A.694 (17),A.823 (19), MSC 191 (79), MSC 192 (79)
• EN 62388 Ed.2.0, 2014• EN 62288 Ed.2.0, 2014• EN 60945 Ed.4.0, 2002 incl. Corr.1, 2008• EN 61162-1 Ed.4.0, 2010• EN 61162-2 Ed.1.0, 1999• IEC61162-450 Ed. 2, 2018• IEC 62923-1, 2018• IEC 62923-2, 2018
Tipo de homologación Directiva 2014/90/UE del Consejo Europeosobre equipos marinos modificada por elReglamento de aplicación (UE) 2020/1170(16 de julio de 2020) de la Comisión:Wheelmark
Rendimiento
RPM. >20 y >40
Potencia nominal máxima
Banda X up-mast 12 kW o 25 kW en función del transceptor
Banda X down-mast 25 kW
Banda S 30 kW
Frecuencia de funcionamiento
Banda X 9410 ± 30 MHz
Banda S 3050 ± 30 MHz
Duración del impulso
Pulso corto 60 ns (25 kW, 30 kW), 80 ns (12 kW)
Pulso medio 250 ns
Pulso largo 800 ns
PRF
Pulso corto 3000 Hz
Pulso medio 1500 Hz
Pulso largo 750 Hz
Modulador MOSFET de estado sólido
Amplificador FI Logarítmico
FI dinámica 95 dB
20
Especificaciones técnicas | R5000 Manual de Usuario 85

Frecuencia central FI 60 MHz
Ancho de banda FI
Pulso corto 24 MHz
Pulso medio 5 MHz
Pulso largo 2 MHz
Ancho del haz horizontal 1,35°
Ancho del haz vertical 22°
ROE <1,20
Factor de ruido general <5 dB nominal
SMD en pulso largo -105 dBm
Características de la pantalla
Modo de presentación Día o noche
Distancia de visualización típica (m)
16” 0,75
19", 24", 27" 1,00
Resolución (píxeles)
16", 19" 1366x768
24", 27" 1920x1080
Diámetro PPI (mm)
16” 180
19” 210
24” 280
27” 320
Corto alcance
Escalas disponibles 1/8, 1/4, 1/2, 3/4, 1,5 y 3 nm
Rango de resolución de vídeo 11,25 m
Resolución de azimut en pantalla 0,1°
Medio alcance
Escalas disponibles 6 y 12 nm
Rango de resolución de vídeo 45 m
Resolución de azimut en pantalla 0,1°
Largo alcance
Escalas disponibles 24, 36, 48, 64, 72 nm
Rango de resolución de vídeo 125 m
Resolución de azimut en pantalla 0,1°
Movimiento relativo (RM) Proa arriba (HU), Rumbo arriba (CU) y Nortearriba (NU)
Movimiento verdadero (TM) Rumbo arriba (CU) y Norte arriba (NU)
Fuera de centrado Hasta un 75% de la escala en uso
CursorCoordenadas polares y geográficas,mostradas continuamente cuando el cursorestá activado
86 Especificaciones técnicas | R5000 Manual de Usuario

Seguimiento de blancos
Adquisición Manual y automático, hasta 100 blancos
Seguimiento Manual y automático, hasta 100 blancos
Alcance de seguimiento 24 nm
AIS
Presentación
• 300 blancos como máximo (todos puedenestar activados)
• Mecanismo de prioridad con exceso deAIS
Comprobación de seguridad 300 blancos en total
Compatibilidad
Trazado de mapas
Mapas compilados por el usuario• Hasta 32 mapas, cada uno puede contener
hasta 120 segmentos y 32 símbolos• Colores y estilos de línea seleccionables
Estabilización de mapas• Relativo• Geográfica
Almacenamiento de mapas
• Por nombre• Memoria no volátil integrada utilizada• Transferencia a/desde tarjeta SD
Ajustes de mapas• Rotar• Desplazar
Indexación paralela Cuatro líneas de índice paralelasindependientes
Lectura de datos
• Datos de la propia embarcación• Datos de seguimiento de blancos• Datos de blancos AIS
Especificaciones técnicas | R5000 Manual de Usuario 87


*988
-123
77-0
02*