random walk model of impact phenomena
TRANSCRIPT

Physica 127A (1984) 490-508
North-Holland, Amsterdam
RANDOM WALK MODEL OF IMPACT PHENOMENA
Bruce J. WEST and Michael SHLESINGER*
Center for Studies of Nonlinear Dynamics +, La Jolla Institute, 8950 Villa La Jolla Drive, Suite 2150, La Jolla, CA 92037, USA
Received 1 February 1984
A model of the permanent distortion of an elastic material due to high velocity projectile impact
is described using a random walk model, with unusual temporal statistics, of the transport of
dislocations. The biased motion of dislocations in a stress field and also in a random environment is
considered. A temperature dependence for certain scaling exponents is derived. The experiment-
ally observed scaling of the total integrated momentum as well as the scaling of the penetration and
strength of the shock wave with time are obtained with this model.
1. Introduction
The physical mechanisms dominating the generation and propagation of high
velocity deformations in elastic materials are not understood. The analysis of
projectile impact experiments over the past thirty years using macroscopic
equations and large scale computer codes has, however, lead to a number of
useful phenomenological relations’). In the more recent past, investigators have
attempted to clarify the relation between the microscopic properties of the
material and its macroscopic response2). Part of the difficulty in establishing this
relationship is associated with the fact that there do not exist unambiguous
continuum equations to describe the irreversible deformations of elastic
materials. If such equations existed, as they do for example in hydrodynamics,
then it would be a relatively straightforward matter to test various theories of
micromechanisms by appropriately averaging or coarse-graining the micro-
scopic equations of motion to obtain the macroscopic equations. Because we
have neither a reliable macroscopic description of the process nor a complete
microscopic description, we avoid such general comparisons and restrict our
attention to a particular deformation problem, i.e., the late stage distortion of
an elastic material due to high-velocity impact of a projectile. We propose a
microscopic model to explain a number of observed macroscopic effects and
which in turn leads to some predicted dependencies which have not as yet been
sought experimentally.
* Permanent address: Office of Naval Research, 800 N. Quincy St., Arlington, VA 22217.
‘Affiliated with the University of California, San Diego.
0378-4371/84/$03.00 @ Elsevier Science Publishers B.V.
(North-Holland Physics Publishing Division)
RANDOM WALK MODEL OF IMPACT PHENOMENA 491
It is experimentally well established that the high speed impact of a hard projectile on a hard target, e.g., steel on steel, can result in both the projectile and target undergoing severe distortion and sometimes melting with a large hemispherical crater being formed on the target surface’). One readily observes that in the formation of the crater, material is ejected away from the target as well as being convected into the target to form a shock wave. The speed of the shock wave of course exceeds the sound speed of the material and produces a large density variation across its leading edge. In the formation of the crater a phase transition can also occur, i.e., melting of the target or projectile or both, and with the passage of the shock wave the temperature of the material increases. With the passage of the leading edge of the shock wave the material readjusts itself into a permanently deformed configuration. This plastic defor- mation absorbs the energy implanted by the projectile. As the material is deformed the shock is weakened until it eventually becomes an ordinary elastic wave and the plastic flow of material ceases. There exists no “theory” of this complex process, but certain aspects of its evolution have been satisfactorily summarized in a number of phenomenological expressions using macroscopic concepts and a combination of experimental data and the results of large scale computer codes. One property that has been “explained” is the relation between the crater depth (p) formed on impact and the properties of the projectile. For a projectile characterized by a linear dimension L, e.g., the diameter of a spherical particle having a density pP and an incident velocity z+, impacting on a target of density pt and sound speed c,,, the crater depth is given by3*4)
p/L = K (2,‘” cg” , (l-1)
where K is characteristic of the strength of the target. The original derivation of (1.1) was based on energy conservation consideration (i.e. crater volume - projectile kinetic energy) in which case (Y = 2/3. However subsequent experi- ments and large scale computer calculations indicated that it is more ap- propriate to treat cy as a parameter. The results of many simulations indicate that (Y = 0.58 is a proper value4). These calculations also indicate that the penetration relation (1.1) is apparently correct for v0 > 2c,, pP Cpt S 3pP
and the aspect ratio of the projectile is within a factor of three of unity. The second piece of phenomenology that is “understood” is the momentum
enhancement resulting from the target recoil. During the formation of the crater, ejecta is thrown backward from the target resulting in a final momentum deposition that can be many times larger than the momentum of the incident projectile. The experimental result for thin targets indicates that this multi-
492 B.J. WEST AND M. SHLESINGER
plication factor r is independent of the projectile velocity above some threshold value. For thicker shields it is observed that r increases with u,, without a limiting value being reached in the experiments conducted’). It has been argued, however, that the momentum multiplication ratio has no upper bound for a semi-infinite target6). In particular Dienes and Walsh4), using a scaling argument, estimate that this ratio should have the form
r = kvr-’ . (1.2)
This estimate is supported by elaborate computer calculations using hydro- dynamic equations for the late stage flow of the material in which they find that the quantity Lvz determines all the asymptotic material properties. This dependence is not unlike the velocity dependence of dissipative processes in non-Newtonian fluids’). These macroscopic arguments give no indication as to how the parameter (Y may be related to microscopic or thermodynamic properties of the material.
The strategy we now employ is to examine a simple microscopic model of the elastic material to provide a “theoretical” underpinning for the relations (1.1) and (1.2). An elaborate microscopic analysis is unwarranted by the data base of interest as we use only the most basic picture of a hard target and projectile. The experimental information we have available indicates that metals are crystal structures consisting of an irregular honeycomb of boundaries. Each of the partitioned segments of the metal has a linear scale of appropriately 0.025 cm and is called a grain. Each grain is a single crystal, regardless of the irregularity of its shape, and a macroscopic piece of metal consists of an agglomeration of randomly oriented crystals joined together along common boundaries. This is the microscopic picture of the hard, but ductile, target upon which the projectile impacts. In addition to the grains there are dislocations in the crystal. These are irregularities of crystal structure that allow atomic planes to slip more easily than in a perfect crystal. When a crystal is subjected to a shearing force, the dislocation in it move along slip planes. For example the grain boundaries are one type of dislocation. Our basic assumption will be that it is the movement of these dislocations that produce the observed deformation in the target’).
In a real metal the number of dislocations is on the order of 1O1’ per square meter as has been counted in well-annealed metals. After coldworking, i.e., strengthening by rolling, drawing, etc., dislocation densities rise to 1015- 1016 rne2. When a projectile impacts on the material the number of dislocations increases dramatically in the impact region. These additional dislocations accumulate almost the entire energy absorbed by the metal in the process of plastic deformation’). We assume that the generation and migration of dis-
RANDOM WALK MODEL OF IMPACT PHENOMENA 493
locations are the dominant mechanisms for absorbing the energy of the shock wave as it passes through the metal. A substantial fraction of these generated dislocations migrate in the stress field produced by the tail region of the shock wave, i.e., they experience the tail region of the shock wave as an externally applied shearing stress field forcing them to move. Because the detailed dynamics of the flow of dislocations in a real material is very complicated and not well understood, we propose a model to describe the dislocation response to the field of shearing stress by analogy with charge conduction in a biased amorphous semiconductor14V20).
We assume that the dislocations in a metal are sparsely distributed so that their dominant interaction is with the lattice of atoms and not with each other. Due to the grainy nature of the metal and the existence of other imperfections such as inclusions, voids, etc., the “space” of the “gas” of dislocations consists of a random network of trapping sites embedded in the crystal lattice. Dis- location transport in such a space can be characterized by a succession of slips from one trapping site to another. In the absence of an externally applied stress field, there is relatively little movement of dislocations in the material. Any movement is inhibited by the interaction of the dislocations with phonons which dissipate the energy of the dislocations in equilibrium. After impact there are a great many dislocations generated in an excited state and these are transported by the externally applied stress field. These dislocations migrate in a random environment from trap to trap via an activation process, the time spent in any one trap being considerably greater than the time required to slip between traps. Hence a statistical description of this transport would be more sensitive to the waiting time at a trapping site than to the duration of a slip between sites. Some related statistical ideas have already been applied to the determination of the velocity of dislocations. For example in the description of visco-elastic flow~‘~*“) ’ m e ui 1 q ‘l’b rium systems using rate theory one determines the average speed at which a dislocation traverses a region consisting of a sequence of potential wells, in which the dislocation is trapped, escapes, is trapped again and so on”). The speed of the dislocation in this case is proportional to exp[-UIkT] where U is the activation energy required to escape the trap, k is Boltzmann’s constant and T is the temperature of the lattice. Note that the dislocation velocity is not proportional to a particle velocity in this description.
The above model of dislocation transport is couched in terms of a random walk model as is the remainder of this paper. In section 2 the mathematical ideas concerning the continuous time random walk model of a walker on a lattice are briefly reviewed. In section 3 this model is applied to a description of the momentum transported in a metal due to the passage of the shock wave generated by the impacting projectile.
494 B.J. WEST AND M. SHLESINGER
2. Random walk model
We assume the material transport arises solely from the movement of dislocations, and model this as a random walk. We first examine the transport in a constant force field. In a material with a constant mobility this would lead to a constant dislocation velocity. Two factors change this simple result:
i) The randomness of the material (potential well depths) can lead to a mobility (and hence velocity) which decreases with time (see subsection 3.1).
ii) The force propelling the dislocations decreases as the shock spreads also causing the flow velocity to decrease (see subsection 3.2). Both effects are combined when we relate our results to experiments in subsection 3.3.
We assume the existence of dislocations and postulate a metal to be divided into a regular lattice of equivalent cells so that each cell contains many traps which inhibit the transport of these dislocations. These traps arise from defects, grain boundaries, etc., and the cells of the model do not correspond to the background crystalline structure of the metal. The metal thus becomes an amorphous insulating material for the dislocations, due to the random locations of the traps13,‘4). We define the function @l(t) to be the pausing time distribution function for a given cell, i.e., $(t)dr is the probability that after a dislocation enters into a cell it remains trapped in it for a time between t and t + dt before it leaves the cell. We locate the cells by lattice vectors s = (si, s2, sj) with +=1,2,..., NP In the present model we use periodic boundary conditions. We consider momentum transport to be the consequence of random movement of dislocations from cell to cell. In the presence of the shearing stress field the movements are subject to a bias in the direction of the field.
Let us consider the function Q(s, t) which is defined as the probability that a walker is at point s at a time immediately after a step has been taken. Then if
9(t) = probability density that a walker remains fixed in the interval (0, t)
I m
= 1- 1 $(t)dt = j- $(t)dt (2.1)
0 ,
the relation between P(s, t), the probability density of a walker being at a point s at time t, and Q(s, t) is
p(s, t) = j- F(t - T)Q(s, T)dr .
0
(2.2)
Equation (2.2) includes the case where a walker arrives at time T and remains

RANDOM WALK MODEL OF IMPACT PHENOMENA 495
for a time (C - 7); P(s, t) is the average over all arrival times with 0 < T < t. The quantity Q(s, t)& is the sum of the probabilities of all the independent
ways in which a walker can arrive at s during the time intervals (t, f + St) as 6t+O. This can happen after the first step, after the second, etc. Hence, by indexing the number of steps by n, we have
as7 0 = c d%,(W,(s) , n=O
(2.3a)
where G”(f) is the probability density for the time at which the nth transition occurs, i.e.
(2.4)
and P,(s) is the probability that a walker arrives at s after the nth step. From the convolution structure of (2.4) it is clear that the Laplace transform of (I/,(t)
is given by
G”(U) = bm” (2.5b)
and P,,(s) satisfies the recursion relation
P,+*(s) = c ~“WP (s - s? 7
I’ (2.6a)
where p(s - s’) is the probability of stepping from s’ to s in a single step. The Fourier transform of p(s) defines the lattice structure function A(k), i.e.
h(k) = 2 eir”p (s) ,
(2.7)

496 B.J. WEST AND M. SHLESINGER
so that using the convolution of Fourier transforms on P,,+,(s) we obtain
C e”.‘P,(s) = [A(k)]“, S
(2.6b)
assuming the walk was initiated at s = 0. Thus the Laplace transform of (2.3) yields
Q(s, u) = c [4$)1”P,(s) n=O
(2.3b)
from which, because this has the form of a generating function, it has been concluded that d(s, u) is the lattice Green’s function G(s, d(u))‘“) (in the continuum limit),
* 1
II
e -is.k
W, 2) = t2TlD 1 - zh(k)
dDk
-a
(2.8)
in D dimensions. The singularity at z = 1 depends on the dimensionality of the lattice through the lattice structure function A(k).
Equation (2.2) for the probability density P(s, t) can be Laplace transformed to yield
&, u) = ; [l- &)lW, J&U)) (2.9)
which upon application of the Laplace inversion formula gives13)
c+im
p(s, t) = & 1 i e”[l - $(u)]G(s, $(u))du . (2.10)
c-im
When the statistics of the pauses between transitions is known through $(t) and the statistics of the direction of transition is known through A(k), all terms on the right-hand side of (2.10) are known and the calculation of P (s, t) is reduced to quadratures.
We introduce the discrete characteristic function which is the Fourier trans- form of the probability density, i.e.
RANDOM WALK MODEL OF IMPACT PHENOMENA 491
P (s, t) = -!- C cp (k, t)e-“” , ND (r,=l)
(2.11)
ki = 27rrJN. In the continuum limit N + CO in three dimensions (D = 3) we inverse Fourier transform (2.11) to obtain
p(k, t) = / d3r eik'rP (r, t)
where r is the continuum position. Inserting we obtain
(2.12)
(2.10) into (2.12) and using (2.8)
(2.13)
c-i-
The Fourier component ~(0, t) is unity since h(0) = 1 and
p!. =l. 0 ll
This is the normalization condition on the probability density. The importance of (2.13) lies in the fact that it is the moment-generating
function for the process. Using (2.12) we can show directly that
_ i a&Y 4 ak,
= tsj) 2
k=O
= (s,Q . k=O
(2.14a)
We apply these formal results to the transport of dislocations in the following section.
3. Dislocation transport
We model the transport of dislocations by means of a random walker which jumps according to a waiting-time density +(t) on a simple cubic lattice in which steps are taken only between neighboring cells, and on which there is a
498 B.J. WEST AND M. SHLESINGER
bias such that in one direction (say the x-direction) the probability of a transition to the right is different from that to the lefti3.14). It may seem at first that the use of a perfect lattice is unjustified for considering transport in a random medium. That this is not so was shown by Klafter and Silbeyz) who studied a rate equation for transport on a disordered lattice with random transition rates. Upon averaging over all possible configurations of this system they arrived at a rate equation for a configurationally average probability P(s, t) on a perfect lattice. Formally all the randomness resided in a memory function (integral kernel) governing the time between jumps on the lattice. Kenkre et al.%) have shown that this configurationally averaged system is exactly equivalent to the continuous-time random walk which we have just described. The probabilities of the allowable jump distances are
(3.1) p (IO, 0) = 2np while p (- 1, 0,O) = 2(1- 7)~.
The conservation of probability requires that
4q + 2p = 1 . (3.2)
The structure function for this walk is
A(k) = C eik’sp (s)
= 2q (COS k, + cos k3) + 2p cos k, + 2i(2n - 1)~ sin k, . (3.3)
This structure function is appropriate for the description of the slipping motion of a dislocation in a lattice in the presence of a constant stress field along the x-axis. The same basic results would be obtained if we considered a bias in an outward radial direction.
We can calculate the centroid location of a dislocation along the x-axis by using (2.14a), i.e.
(q(t)) = -i $- cp(k,, O,O, r)lk,=O. 1
To determine cp(k,, 0, 0, t) we note that
A (k,, 0,O) = 1 - 2p [2 - cos k, - (27 - 1)i sin k,]
(3.4)
(3.5)
RANDOM WALK MODEL OF IMPACT PHENOMENA 499
and from (3.4)
c+im
(3.6) k,=O
c-i-
so that
(Sl(f)) = s,Ptd(u)lu[l - cl;Wll (3.7)
where S, = 2p(277 - 1). the centroid location of the dislocation is therefore directly determined by the pausing time distribution function g(f).
3.1. Waiting times and random activation energies
In the rate theory models of deformation kinetics12) it is necessary for a dislocation to surmount an energy barrier E in order to propagate, i.e., the stress field established by the shock wave must be sufficient to excite the dislocation out of its local bound state. In particular we are interested in determining how a dislocation will traverse a region of the metal in which there is a sequence of trapping wells characterized by a distribution of activation energies g(E). Such activation energy models have been used to discuss charge transfer in disordered materials’7’18 ), adatom motion on surfacesr6) where perfect order is upset by lattice vibrations, and stress relaxation in deformed elastic materials12). We will show that if the randomness is severe enough the spatial disorder can alter the nature of the transport.
The unstressed metal is assumed to be in a state of thermodynamic equili- brium so that the rate at which dislocations are activated is given by12)
A = A,exp{- e/kT}, (3.8)
where T is the temperature of the metal and k is Boltzmann’s constant. In the equilibrium theory of rate processes one assumes that the stable configurations are in equilibrium with the activated configurations. The waiting time dis- tribution in this case, for a single rate constant A is given by
$(t) = A edA’. (3.9)
As the shock wave propagates through the metal a stress field is imposed and the target material is distorted. We assume this distortion to be sufficiently great that the “gas” of dislocations experiences a random environment des-

500 B.J. WEST AND M. SHLESINGER
cribed by a distribution of transition rates p(A) rather than the single rate A. In the nonequilibrium state of the metal the waiting-time distribution (3.9) is
replaced with
cc
w = 1 A e-*‘p (h)dA (3.10)
0
to account for the disordering of the metal. The number of transition rates in the interval (A, A + dh) is equal to the number of activation energies in the interval (E, E + dc) so that
p(A)dA = g(.s)dE.. (3.11)
A distribution of activation energies that has proven to be of value in a number of related physical problems is’““)
g(E)= (;”
-elkTo if so C E G cr,
otherwise
in which case
P(A)=
-,t(T)A-” if A, e-F1’kT S A C A, e-ao’kT ,
0 if A 2 A, e-Eo’kT ,
(3.12)
(3.13)
where
IJ = l-T/T,, (3.14)
1 -q,lkTo
g”=Ee ’
(3.15)
and y(T) is a temperature-dependent normalization factor to ensure that
cc
I Jl(t)dt = 1 . (3.16)
0
In the above model To is a reference temperature such that for T > To the distribution p(A) is analytic at A = 0 and the first moment of +(t) exists, i.e.
RANDOM WALK MODEL OF IMPACT PHENOMENA 501
m
t= I
r$(t)dt <m . (3.17)
0
Thus the expansion of the Laplace transform of t,b(t) can be written as
G(u)= l- ut+ O(u*) as u+O (3.18)
and from (3.7) the centroid position of a dislocation is
(s1(t)> - &t/t. (3.19)
However, for T < To the distribution of rates p (A) becomes singular at A = 0 so that t= m. The expansion (3.18) in this case is replaced with
Jl(u)=l-c,u’-“+... asu+O (3.20a)
and
[l - $(u)]/u - qu-” as u --* 0 (3.20b)
has a branch-cut singularity at the origin, Feller”) has shown that I,&(U) of the form (3.20) is associated with a waiting-time distribution of asymptotic form (as t+@J)
$(t)-cCll[~(7j)f2-q] forO<l-71<1. (3.21)
Thus from (3.7) the location of the centroid of the dislocation at time t is
($(f)) - 3 .P(u-‘+v) as f+m. Cl
(3.22)
By applying the Tauberian theorem of Hardy, Littlewood and Karamata on Laplace transforms, if
f(u)-AU-~ as u+O
then, when f(u) = Y(F(t)),
F(t)- AP-‘/T(p) as t-w,
502 B.J. WEST AND M. SHLESINGER
with A being a constant. Shlesinge?) deduced that (3.22) becomes
(s&)> - : PT(l - 7) ast+m. (3.23)
Thus the velocity of propagation of the centroid of the dislocation becomes
(3.24)
3.2. A conservation law
From studies of crater depths [cf. (l.l)] and peak shock pressure versus shock penetration distance [cf. fig. 31 one arrives at the expression
Mt$ = constant,
as the conserved quantity imparted to the targetzs4). Note that if (Y = 2/3 this relation implies energy conservation, while (Y = l/3 yields momentum con- servation. One would not expect momentum conservation in the target because during the crater formation phase material is ejected backwards thus enhancing the forward momentum above that of the incident projectile. We believe that energy conservation would appear not to apply because the material when disordered by the shock has a mobility decreasing in time, i.e. less plastic flow than expected by energy conservation.
The conservation law is equivalent to the following scaling relation for the plastic flow length 1, as a function of time (note that M, the mass engulfed by the shock, scales as (~,(t))~),
1
P _ flu+“)
> (3.25)
so even when energy is conserved, 1, - t215 because the strength of the shock decreases with penetration distance into the sample. Experimentally LY = 0.591V4).
Equation (3.23) for the deformation distance when coupled with the decreasing biasing force yields
1
P _ twX1-?) (3.26)
Note that for q = 0 we return to the usual random walk statistics and energy conservation.
RANDOM WALK MODEL OF IMPACT PHENOMENA 503
3.3. Comparison with experiment
3.3.1. Early-stage configuration At the early stages of the impact when the strength of the shock is not
appreciably decreasing we assume that T > TO so that the newly generated dislocations move easily in the presence of the activation barriers. In particular the mean first passage time t is finite and the centroid location increases linearly with time [cf. (3.19)] yielding a constant mean velocity, i.e.
d(G)) f, dt -7’ (3.27)
The integrated momentum imparted to the target in the axial direction 1, is therefore given by
I,,M?, t
(3.28)
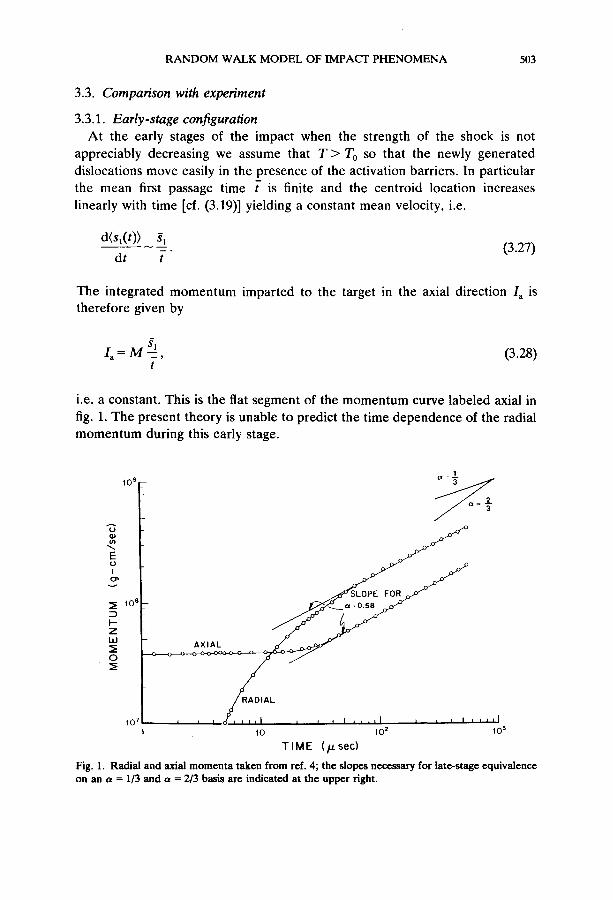
i.e. a constant. This is the flat segment of the momentum curve labeled axial in fig. 1. The present theory is unable to predict the time dependence of the radial momentum during this early stage.
Fig. 1. Radial and axial momenta taken from ref. 4; the slopes necessary for late-stage equivalence on an Q = l/3 and P = 2/3 basis are indicated at the upper right.
504 B.J. WEST AND M. SHLESINC-ER
z _ NETRATION -2 0
u 0 -J ios-
_ 5
w - -‘O z
> _
- 2 - m
w -
ti K STRENGTH _ 0
F
104 1
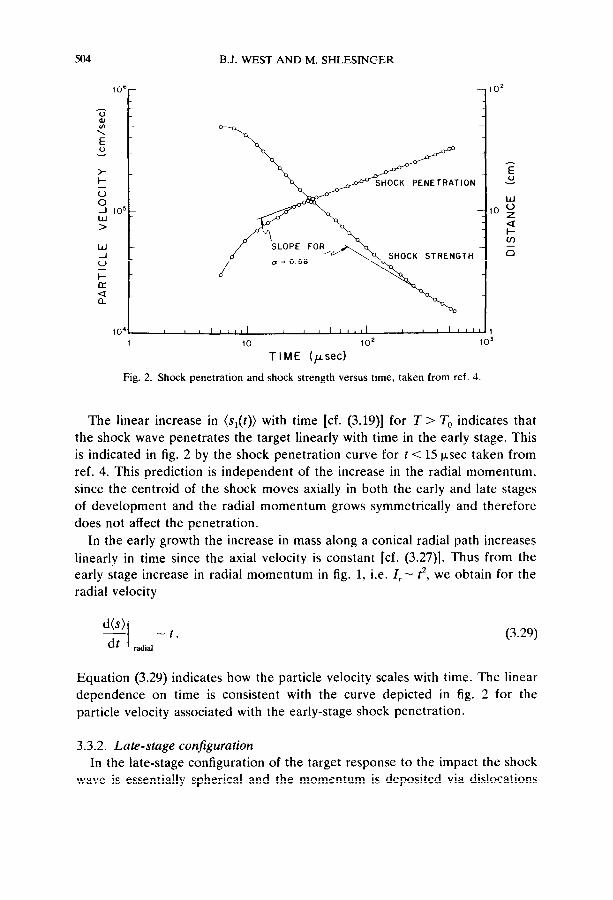
Fig. 2. Shock penetration and shock strength versus time, taken from ref. 4.
The linear increase in (sr(t)) with time [cf. (3.19)] for T > TO indicates that
the shock wave penetrates the target linearly with time in the early stage. This
is indicated in fig. 2 by the shock penetration curve for t < 15 pet taken from
ref. 4. This prediction is independent of the increase in the radial momentum,
since the centroid of the shock moves axially in both the early and late stages
of development and the radial momentum grows symmetrically and therefore
does not affect the penetration.
In the early growth the increase in mass along a conical radial path increases
linearly in time since the axial velocity is constant [cf. (3.27)]. Thus from the
early stage increase in radial momentum in fig. 1, i.e. I,- t*, we obtain for the
radial velocity
4s) _ t dt ’ radial
(3.29)
Equation (3.29) indicates how the particle velocity scales with time. The linear
dependence on time is consistent with the curve depicted in fig. 2 for the
particle velocity associated with the early-stage shock penetration.
3.3.2. Late-stage configuration
In the late-stage configuration of the target response to the impact the shock
wave is essentially spherical and the momentum is deposited via dislocations
RANDOM WALK MODEL OF IMPACT PHENOMENA 505
interacting with the phonons of the metal. The conserved quantity’) is Mu: so that at each instant of time the amount of this quantity absorbed by the material is given by
m d(s) (-> dt
3a = constant, (3.30)
where the transported mass m and the velocity of the centroid d(s)/dt have inverse time dependencies. We can associate a total volume deformation (mass) with the scale (s,(t))3 for T < T, for which [cf. (3.26)]
(s,(t)>3 - t(6/5)(‘-v) . (3.31)
Thus from (3.25) and (3.31) we obtain the relation between parameters
f (I- 7) = 3a/(lf CI)
so that using (3.14) we obtain
2(1-77) 2T
a=3+= 5T,--2T for T s To
(3.32a)
(3.32b)
and a temperature dependence of the scaling parameter of Dienes and Walsh4) is predicted. Note that this argument implies that the penetration depth p - V: decreases with decreasing temperature.
We have fixed the macroscopic parameter (Y from the microscopic model by means of the conservation law (3.30). We now use the more familiar quantity, mu, to determine the momentum deposited in the target by the shock wave in the late-stage configuration. The integrated momentum associated with the shock wave is
r-m!g (3.33)
since there is spherical symmetry at late times. Thus from (3.30) and (3.26) we obtain the scaling relation
1 _ pXl-skl = t(k-lMa+l) (3.34)
so that for a given temperature the parameter cy can be determined from a
506 B.J. WEST AND M. SHLESINGER
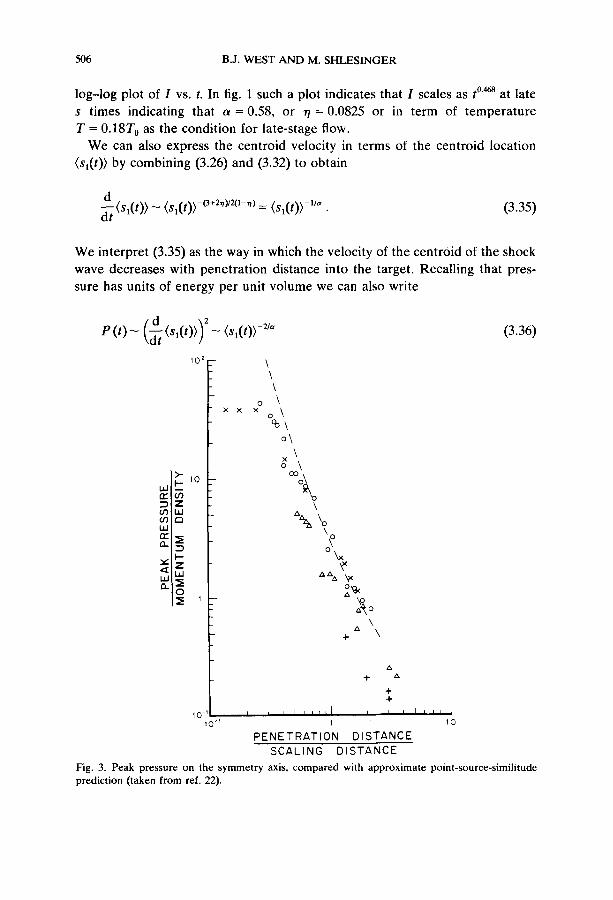
log-log plot of I vs. t. In fig. 1 such a plot indicates that I scales as t0.w at late s times indicating that (Y = 0.58, or 17 = 0.0825 or in term of temperature T = O.l8T, as the condition for late-stage flow.
We can also express the centroid velocity in terms of the centroid location (sl(t)) by combining (3.26) and (3.32) to obtain
_!p)) - (s,(t))-(3+*~)‘+J) = (s*(t)>-“” . (3.35)
We interpret (3.35) as the way in which the velocity of the centroid of the shock wave decreases with penetration distance into the target. Recalling that pres- sure has units of energy per unit volume we can also write
(3.36)
\ “0 ‘\
O\
+ A A
+ +
PENETRATION DISTANCE
SCALING DISTANCE
Fig. 3. Peak pressure on the symmetry axis, compared with approximate point-source-similitude prediction (taken from ref. 22).
RANDOM WALK MODEL OF IMPACT PHENOMENA 507
as the peak pressure associated with the deformation of the metal with the passage of the shock wave. Thus the shock pressure attenuates as an inverse power of the penetration distance. Pressure measurements from a number of different experiments are indicated in fig. 3 and show the fall-off in the peak pressure as a function of penetration distance”). These data are consistent with CY = 0.58 obtained from other measurements.
In fig. 2 the penetration of the shock wave as well as its strength is graphed as a function of time. This figure and fig. 1 show both the early- and late-stage behavior of the physical observables. The late-stage behavior we understand in terms of the present model. The early time behavior is not so well understood.
4. Conclusions
A random walk model of the flow of dislocations has been used to describe the permanent deformation of a metal produced by the high-velocity impact of a projectile. We have incorporated two effects which cause the velocity of the plastic flow to decrease with time. The first is that the strength of the shock wave decreases as it penetrates and spreads out into the material. The second is that the metal can have an intrinsic mobility that decreases with time in response to an impact when the shock strength is below a critical level. The experimentally observed scaling relations with time for the integrated momen- tum imparted to the metal as well as the penetration and strength of the shock wave, are all predicted by the present model. These results agree with the scaling arguments presented by Dienes and Walsh4). The present model, although phenomenological, has the advantage over strictly scaling models of being directly tied to the microscopic description of the metal target. In this way we have predicted a temperature dependence of the scaling parameter (Y [cf. (3.32b)]. A further topic for study is the behavior of (Y as a function of classes of materials.
The present application of random walk ideas is consistent with a resurgence of interest in these methods and their proven utility in modeling a broad range of interesting problemsz*26).
Acknowledgement
The authors acknowledge the Defense Advanced Research Projects Agency for the financial support of the research.
508 B.J. WEST AND M. SHLESINGER
References
1) R. Kinslow, High-Velocity Impact Phenomena (Academic Press, New York, 1970).
2) High Velocity Deformation of Solids, IUTAM Symp., K. Kawata and J. Shioiri, eds. (Springer,
Berlin, 1978).
3) A.C. Charters and J.L. Summers, Proc. Decennial Symp. White Oak U.S. Naval. Ord. Lab.
(1959).
4) J.K. Dienes and J.M. Walsh, in ref. 1, p. 45.
5) J.W. Gehring, Jr., in ref. 1, p. 105.
6) J.M. Walsh and W.E. Johnson. in: Svmo. Hvoervelocitv Imoact, 7th. 2 (1965) I.
7j
8)
9)
IO)
II)
12)
13)
14)
15)
16)
17)
18)
19)
20)
21)
22)
23)
24)
25)
26)
Lecture Notes in Mathematics 457,.Fractional Calculus and its Applications, B. Ross, ed.
(Springer, Berlin, 1975).
See for example, R.W. Lander, Math. Expo. No. 17, Mathematical Theory of Dislocations and
Fracture (University of Toronto Press, Toronto, 1974) see especially chap. 7.
For a brief discussion of the theory see e.g., G.I. Epifanov, Solid State Physics, translated from
Russian by M. Samokhvalov (Mir, Moscow, 1979).
Dislocation Modeling of Physical Systems, M.F. Ashby, R. Bullough, C.S. Hartley and J.P. Hirth, eds. (Pergamon Press, New York, 1980).
R.D. Isaac and A.V. Granato, in ref. 10, p. 425.
A.S. Krausz and H. Eyring, Deformation Kinetics (Wiley-Interscience, New York, 1975).
For a brief review of this subject see e.g., E.W. Montroll and B.J. West, in: Fluctuation
Phenomena, E.W. Montroll and J. Lebowitz, eds. (North-Holland, Amsterdam 1979).
E.W. Montroll and H. Scher, J. Stat. Phys. 1 (1973) 101, Phys. Rev. B 12 (1975) 2455.
E.W. Montroll and G. Weiss, J. Math. Phys. 6 (1965) 178.
J. Klafter and R. Silbey, Surface Sci. 92 (1980) 393.
J. Bernasconi, H.V. Beyeler, S. Strasler and S. Alexander, Phys. Rev. Lett. 42 (1979) 819.
S. Alexander, J. Bernasconi, W.R. Schneider and R. Orbach, Rev. of Modern Phys. 53 (1981)
17.5.
W. Feller, An Introduction to Probability Theory and Its Applications, Vols. I and II (Wiley,
New York, 1966).
M. Shlesinger, J. Stat. Phys. 10 (1974) 421.
T. Shioya and K. Kawata, in ref. 2, p. 345. W.J. Rae, in ref. 1, p. 277.
J. Klafter and R. Silbey, Phys. Rev. L&t. 44 (1980) 55.
V.M. Kenkre, E.W. Montroll and M.F. Shlesinger, J. Stat. Phys. 9 (1973) 45.
J. Stat. Phys. 30 (1983), Proc. Symp. on Random Walks and Their Application to the Physical
and Biological Sciences, G.W. Weiss and R.J. Rubin, eds.
B.J. West and M.F. Shlesinger, J. Stat. Phys. 30 (1983) 527.