real algebraic finite elements and de rham …ccom.ucsd.edu/~agillette/research/kausttalk.pdf ·...
TRANSCRIPT
university-logo
Real Algebraic Finite Elements and de RhamCohomology
Andrew Gillette
joint work with
Chandrajit Bajaj
Department of MathematicsInstitute of Computational Engineering and Sciences
University of Texas at Austin
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 1 / 33
university-logo
Motivation
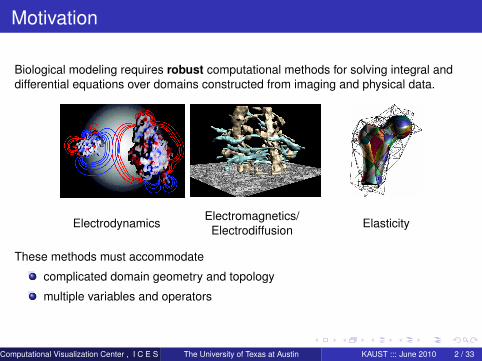
Biological modeling requires robust computational methods for solving integral anddifferential equations over domains constructed from imaging and physical data.
Electrodynamics Electromagnetics/Electrodiffusion Elasticity
These methods must accommodate
complicated domain geometry and topology
multiple variables and operators
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 2 / 33
university-logo
Outline
1 Domain Modeling: Real Algebraic Finite Elements
2 Function Modeling: DEC-deRham Theory
3 Discrete Hodge Stars and Their Inverses
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 3 / 33
university-logo
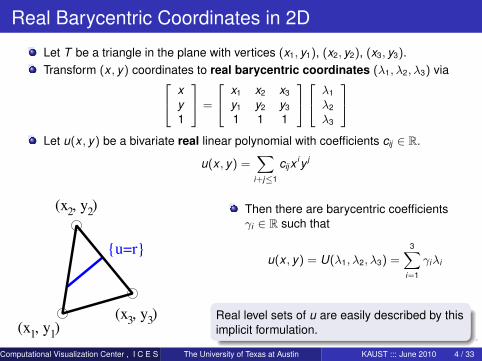
Real Barycentric Coordinates in 2D
Let T be a triangle in the plane with vertices (x1, y1), (x2, y2), (x3, y3).Transform (x , y) coordinates to real barycentric coordinates (λ1, λ2, λ3) via x
y1
=
x1 x2 x3
y1 y2 y3
1 1 1
λ1
λ2
λ3
Let u(x , y) be a bivariate real linear polynomial with coefficients cij ∈ R.
u(x , y) =∑
i+j≤1
cijx iy j
1(x , y )1
2(x , y )2
3(x , y )3
u=r
Then there are barycentric coefficientsγi ∈ R such that
u(x , y) = U(λ1, λ2, λ3) =3∑
i=1
γiλi
Real level sets of u are easily described by thisimplicit formulation.
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 4 / 33
university-logo
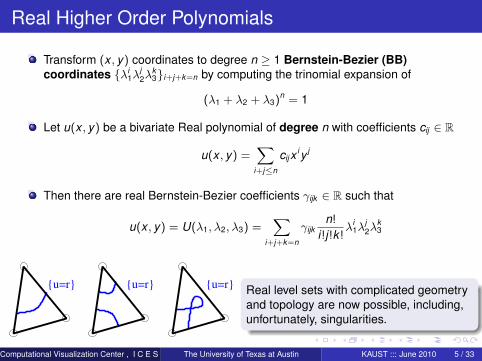
Real Higher Order Polynomials
Transform (x , y) coordinates to degree n ≥ 1 Bernstein-Bezier (BB)coordinates λi
1λj2λ
k3i+j+k=n by computing the trinomial expansion of
(λ1 + λ2 + λ3)n = 1
Let u(x , y) be a bivariate Real polynomial of degree n with coefficients cij ∈ R
u(x , y) =∑
i+j≤n
cijx iy j
Then there are real Bernstein-Bezier coefficients γijk ∈ R such that
u(x , y) = U(λ1, λ2, λ3) =∑
i+j+k=n
γijkn!
i!j!k !λi
1λj2λ
k3
u=r u=r u=r Real level sets with complicated geometryand topology are now possible, including,unfortunately, singularities.
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 5 / 33
university-logo
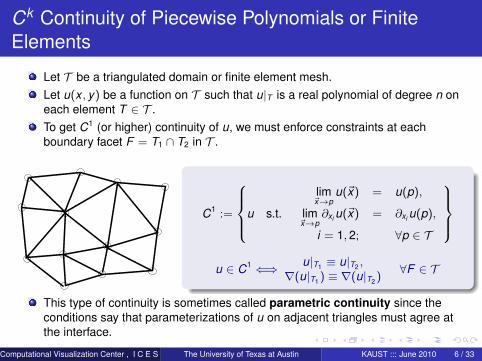
Ck Continuity of Piecewise Polynomials or FiniteElements
Let T be a triangulated domain or finite element mesh.Let u(x , y) be a function on T such that u|T is a real polynomial of degree n oneach element T ∈ T .To get C1 (or higher) continuity of u, we must enforce constraints at eachboundary facet F = T1 ∩ T2 in T .
C1 :=
u s.t.
lim~x→p
u(~x) = u(p),
lim~x→p
∂xi u(~x) = ∂xi u(p),
i = 1, 2; ∀p ∈ T
u ∈ C1 ⇐⇒ u|T1 ≡ u|T2 ,
∇(u|T1 ) ≡ ∇(u|T2 )∀F ∈ T
This type of continuity is sometimes called parametric continuity since theconditions say that parameterizations of u on adjacent triangles must agree atthe interface.
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 6 / 33
university-logo
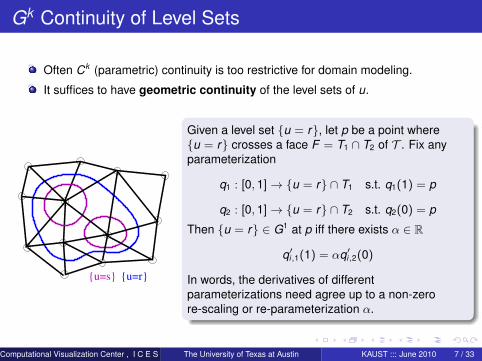
Gk Continuity of Level Sets
Often Ck (parametric) continuity is too restrictive for domain modeling.
It suffices to have geometric continuity of the level sets of u.
u=s u=r
Given a level set u = r, let p be a point whereu = r crosses a face F = T1 ∩ T2 of T . Fix anyparameterization
q1 : [0, 1]→ u = r ∩ T1 s.t. q1(1) = p
q2 : [0, 1]→ u = r ∩ T2 s.t. q2(0) = p
Then u = r ∈ G1 at p iff there exists α ∈ R
q′i,1(1) = αq′i,2(0)
In words, the derivatives of differentparameterizations need agree up to a non-zerore-scaling or re-parameterization α.
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 7 / 33
university-logo
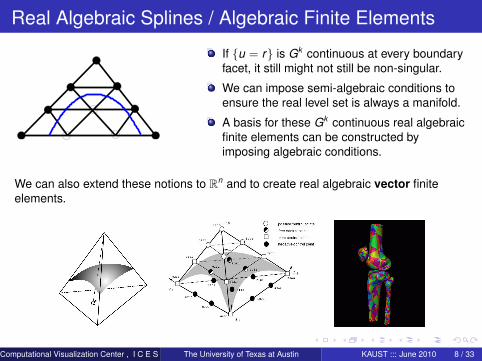
Real Algebraic Splines / Algebraic Finite Elements
If u = r is Gk continuous at every boundaryfacet, it still might not still be non-singular.
We can impose semi-algebraic conditions toensure the real level set is always a manifold.
A basis for these Gk continuous real algebraicfinite elements can be constructed byimposing algebraic conditions.
We can also extend these notions to Rn and to create real algebraic vector finiteelements.
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 8 / 33
university-logo
Algebraic Spline Finite Elements
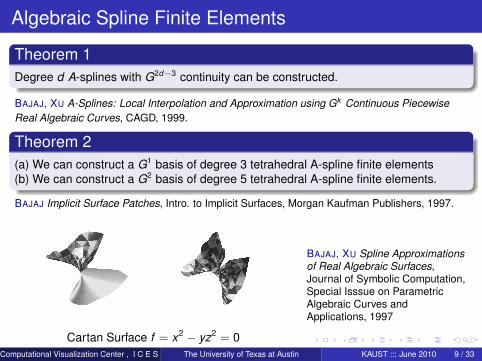
Theorem 1Degree d A-splines with G2d−3 continuity can be constructed.
BAJAJ, XU A-Splines: Local Interpolation and Approximation using Gk Continuous PiecewiseReal Algebraic Curves, CAGD, 1999.
Theorem 2(a) We can construct a G1 basis of degree 3 tetrahedral A-spline finite elements(b) We can construct a G2 basis of degree 5 tetrahedral A-spline finite elements.
BAJAJ Implicit Surface Patches, Intro. to Implicit Surfaces, Morgan Kaufman Publishers, 1997.
Cartan Surface f = x2 − yz2 = 0
BAJAJ, XU Spline Approximationsof Real Algebraic Surfaces,Journal of Symbolic Computation,Special Isssue on ParametricAlgebraic Curves andApplications, 1997
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 9 / 33
university-logo
Splines and Geometric Modeling
Domain Modeling:Many spline types exist for domain modeling, including A-, B-, NURB- , X, andZ-splines.[SCHONBERG, 1958] and many many others
Real algebraic finite elements provide an efficient method for creating smoothmanifold computational domains with complicated geometry and topology.
The approximation error between a discretization of such domains and theanalytical domain can also be bounded.
Function Modeling:Solutions to PDEs have different, less restrictive continuity requirements than thedomains that support them.
Measuring the error of a function discretized on a discretized domain requiresnew, additional theory.
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 10 / 33
university-logo
Outline
1 Domain Modeling: Real Algebraic Finite Elements
2 Function Modeling: DEC-deRham Theory
3 Discrete Hodge Stars and Their Inverses
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 11 / 33
university-logo
Continuity of Solution Spaces of PDEs
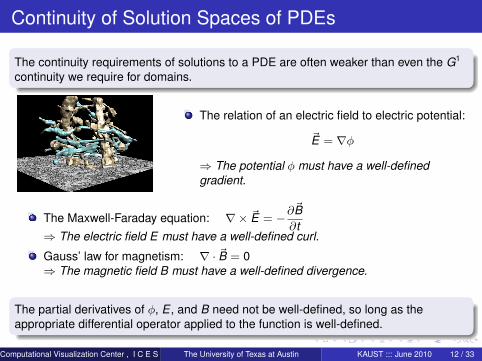
The continuity requirements of solutions to a PDE are often weaker than even the G1
continuity we require for domains.
The relation of an electric field to electric potential:
~E = ∇φ
⇒ The potential φ must have a well-definedgradient.
The Maxwell-Faraday equation: ∇× ~E = −∂~B∂t
⇒ The electric field E must have a well-defined curl.
Gauss’ law for magnetism: ∇ · ~B = 0⇒ The magnetic field B must have a well-defined divergence.
The partial derivatives of φ, E , and B need not be well-defined, so long as theappropriate differential operator applied to the function is well-defined.
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 12 / 33
university-logo
H1, H(curl), H(div)
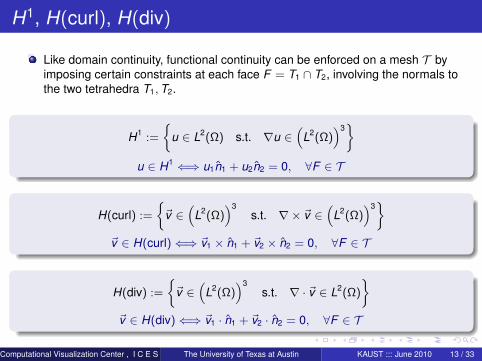
Like domain continuity, functional continuity can be enforced on a mesh T byimposing certain constraints at each face F = T1 ∩ T2, involving the normals tothe two tetrahedra T1,T2.
H1 :=
u ∈ L2(Ω) s.t. ∇u ∈
(L2(Ω)
)3
u ∈ H1 ⇐⇒ u1n1 + u2n2 = 0, ∀F ∈ T
H(curl) :=
~v ∈
(L2(Ω)
)3s.t. ∇× ~v ∈
(L2(Ω)
)3
~v ∈ H(curl)⇐⇒ ~v1 × n1 + ~v2 × n2 = 0, ∀F ∈ T
H(div) :=
~v ∈
(L2(Ω)
)3s.t. ∇ · ~v ∈ L2(Ω)
~v ∈ H(div)⇐⇒ ~v1 · n1 + ~v2 · n2 = 0, ∀F ∈ T
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 13 / 33
university-logo
Robust PDE Methods
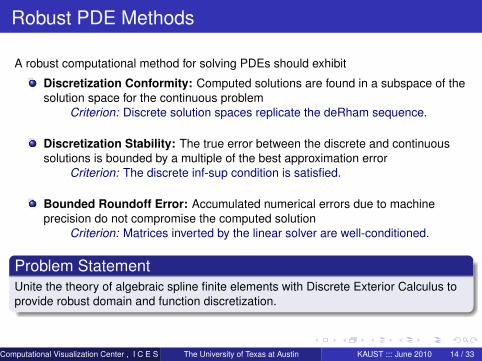
A robust computational method for solving PDEs should exhibit
Discretization Conformity: Computed solutions are found in a subspace of thesolution space for the continuous problem
Criterion: Discrete solution spaces replicate the deRham sequence.
Discretization Stability: The true error between the discrete and continuoussolutions is bounded by a multiple of the best approximation error
Criterion: The discrete inf-sup condition is satisfied.
Bounded Roundoff Error: Accumulated numerical errors due to machineprecision do not compromise the computed solution
Criterion: Matrices inverted by the linear solver are well-conditioned.
Problem StatementUnite the theory of algebraic spline finite elements with Discrete Exterior Calculus toprovide robust domain and function discretization.
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 14 / 33
university-logo
Selected Prior Work
Importance of differential geometry in computational methods for electromagnetics:
BOSSAVIT Computational Electromagnetism Academic Press Inc. 1998
Primer on DEC theory and program of work:
DESBRUN, HIRANI, LEOK, MARSDEN Discrete Exterior Calculus arXiv:math/0508341v2[math.DG], 2005
Generalization of deRham diagram criteria for model conformity:
ARNOLD, FALK, WINTHER Finite element exterior calculus, homological techniques, andapplications Acta Numerica, 15:1-155, 2006.
Applications of DEC to elasticity problems:
YAVARI On geometric discretization of elasticity Journal of Mathematical Physics,
49(2):022901-1–36, 2008
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 15 / 33
university-logo
(Smooth) Exterior Calculus
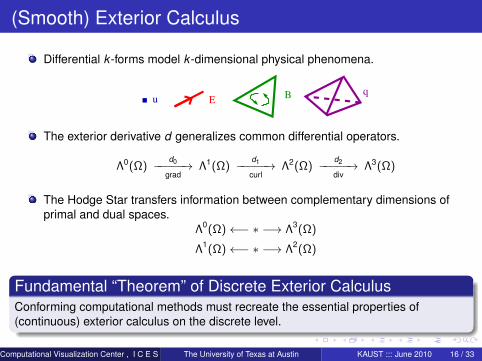
Differential k -forms model k -dimensional physical phenomena.
EB q
u
The exterior derivative d generalizes common differential operators.
Λ0(Ω)d0−−−−−→
gradΛ1(Ω)
d1−−−−−→curl
Λ2(Ω)d2−−−−−→div
Λ3(Ω)
The Hodge Star transfers information between complementary dimensions ofprimal and dual spaces.
Λ0(Ω)←− ∗ −→ Λ3(Ω)
Λ1(Ω)←− ∗ −→ Λ2(Ω)
Fundamental “Theorem” of Discrete Exterior CalculusConforming computational methods must recreate the essential properties of(continuous) exterior calculus on the discrete level.
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 16 / 33
university-logo
Discrete Exterior Calculus
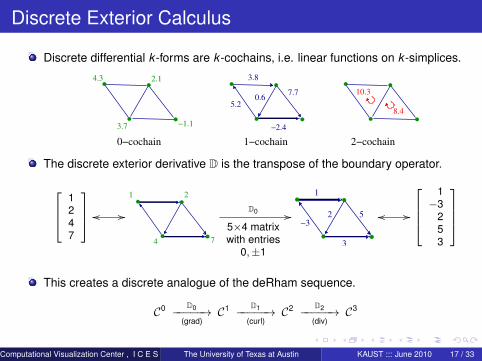
Discrete differential k -forms are k -cochains, i.e. linear functions on k -simplices.
8.4
10.3
3.7
2.14.3
−1.1
0−cochain 1−cochain 2−cochain
3.8
7.7
5.20.6
−2.4
The discrete exterior derivative D is the transpose of the boundary operator.
1247
oo //
1 2
4 7
D0
5×4 matrixwith entries
0,±1
//
1
2
−3
3
5
1−3
253
//oo
This creates a discrete analogue of the deRham sequence.
C0 D0−−−−−→(grad)
C1 D1−−−−−→(curl)
C2 D2−−−−−→(div)
C3
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 17 / 33
university-logo
The Importance of Cohomology
Λ0d0
grad// Λ1
d1
curl// Λ2
d2
div// Λ3
C0D0 // C1
D1 // C2D2 // C3
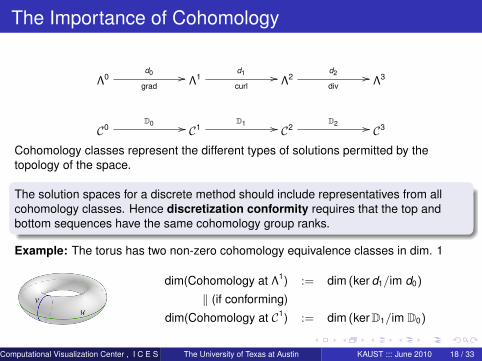
Cohomology classes represent the different types of solutions permitted by thetopology of the space.
The solution spaces for a discrete method should include representatives from allcohomology classes. Hence discretization conformity requires that the top andbottom sequences have the same cohomology group ranks.
Example: The torus has two non-zero cohomology equivalence classes in dim. 1
dim(Cohomology at Λ1) := dim (ker d1/im d0)
‖ (if conforming)
dim(Cohomology at C1) := dim (kerD1/im D0)
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 18 / 33
university-logo
Finite element methods
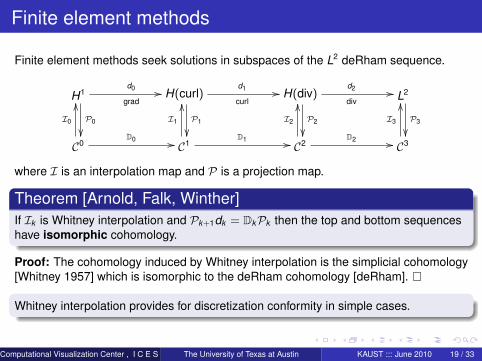
Finite element methods seek solutions in subspaces of the L2 deRham sequence.
H1d0
grad//
P0
H(curl)d1
curl//
P1
H(div)d2
div//
P2
L2
P3
C0
D0 //
I0
OO
C1D1 //
I1
OO
C2D2 //
I2
OO
C3
I3
OO
where I is an interpolation map and P is a projection map.
Theorem [Arnold, Falk, Winther]If Ik is Whitney interpolation and Pk+1dk = DkPk then the top and bottom sequenceshave isomorphic cohomology.
Proof: The cohomology induced by Whitney interpolation is the simplicial cohomology[Whitney 1957] which is isomorphic to the deRham cohomology [deRham].
Whitney interpolation provides for discretization conformity in simple cases.
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 19 / 33
university-logo
Discrete Exterior Calculus
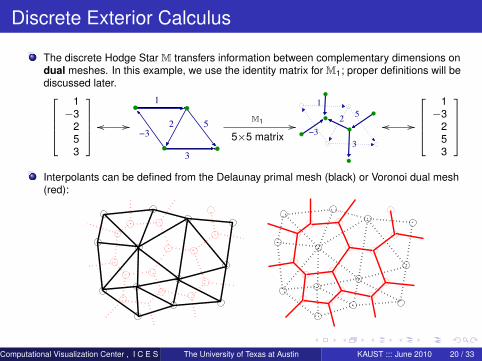
The discrete Hodge Star M transfers information between complementary dimensions ondual meshes. In this example, we use the identity matrix for M1; proper definitions will bediscussed later.
1−3
253
oo //
1
2
−3
3
5M1
5×5 matrix//
3
5
−3
2
1
1−3
253
//oo
Interpolants can be defined from the Delaunay primal mesh (black) or Voronoi dual mesh(red):
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 20 / 33
university-logo
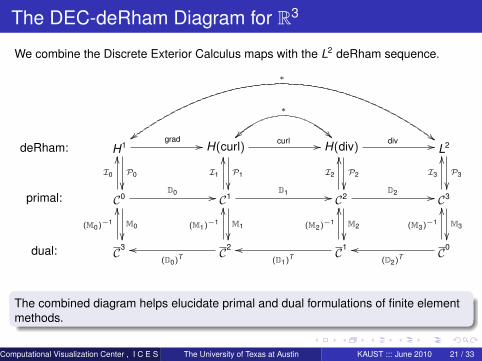
The DEC-deRham Diagram for R3
We combine the Discrete Exterior Calculus maps with the L2 deRham sequence.
deRham: H1grad //
P0
∗
##H(curl) curl //
P1
∗
!!H(div)
div //
P2
L2
P3
primal: C0
D0 //
I0
OO
M0
C1D1 //
I1
OO
M1
C2D2 //
I2
OO
M2
C3
I3
OO
M3
dual: C3
(M0)−1
OO
C2
(D0)Too
(M1)−1
OO
C1
(D1)Too
(M2)−1
OO
C0
(D2)Too
(M3)−1
OO
The combined diagram helps elucidate primal and dual formulations of finite elementmethods.
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 21 / 33
university-logo
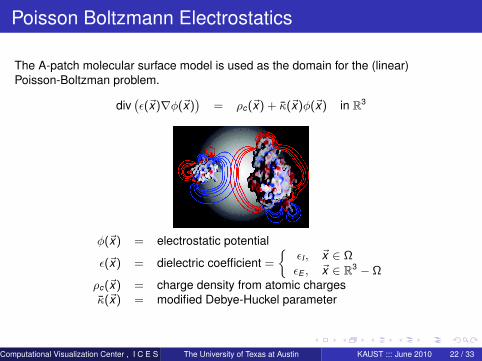
Poisson Boltzmann Electrostatics
The A-patch molecular surface model is used as the domain for the (linear)Poisson-Boltzman problem.
div(ε(~x)∇φ(~x)
)= ρc(~x) + κ(~x)φ(~x) in R3
φ(~x) = electrostatic potential
ε(~x) = dielectric coefficient =
εI , ~x ∈ Ω
εE , ~x ∈ R3 − Ωρc(~x) = charge density from atomic chargesκ(~x) = modified Debye-Huckel parameter
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 22 / 33
university-logo
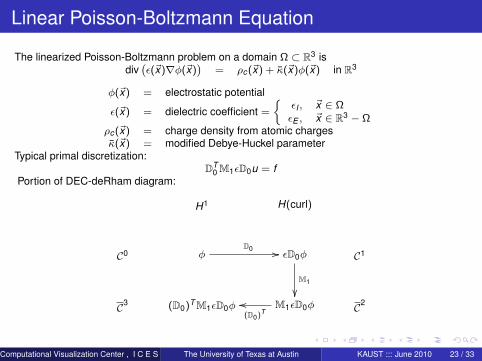
Linear Poisson-Boltzmann Equation
The linearized Poisson-Boltzmann problem on a domain Ω ⊂ R3 isdiv(ε(~x)∇φ(~x)
)= ρc(~x) + κ(~x)φ(~x) in R3
φ(~x) = electrostatic potential
ε(~x) = dielectric coefficient =
εI , ~x ∈ ΩεE , ~x ∈ R3 − Ω
ρc(~x) = charge density from atomic chargesκ(~x) = modified Debye-Huckel parameter
Typical primal discretization:DT
0 M1εD0u = fPortion of DEC-deRham diagram:
H1 H(curl)
C0 φD0 // εD0φ
M1
C1
C3 (D0)TM1εD0φ M1εD0φ(D0)T
oo C2
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 23 / 33
university-logo
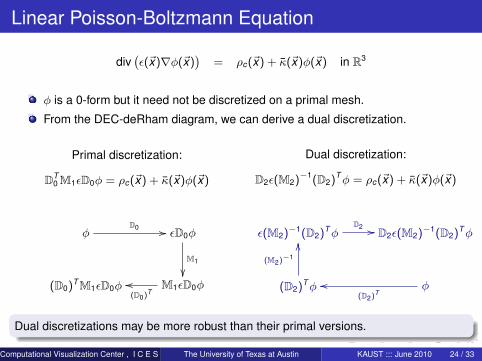
Linear Poisson-Boltzmann Equation
div(ε(~x)∇φ(~x)
)= ρc(~x) + κ(~x)φ(~x) in R3
φ is a 0-form but it need not be discretized on a primal mesh.
From the DEC-deRham diagram, we can derive a dual discretization.
Primal discretization:
DT0 M1εD0φ = ρc(~x) + κ(~x)φ(~x)
φD0 // εD0φ
M1
(D0)TM1εD0φ M1εD0φ
(D0)Too
Dual discretization:
D2ε(M2)−1(D2)Tφ = ρc(~x) + κ(~x)φ(~x)
ε(M2)−1(D2)TφD2 // D2ε(M2)−1(D2)Tφ
(D2)Tφ
(M2)−1
OO
φ(D2)T
oo
Dual discretizations may be more robust than their primal versions.
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 24 / 33
university-logo
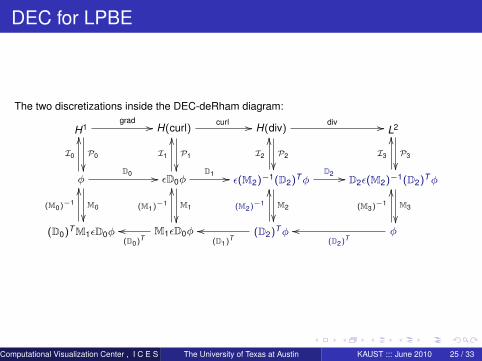
DEC for LPBE
The two discretizations inside the DEC-deRham diagram:
H1grad //
P0
H(curl)curl //
P1
H(div)div //
P2
L2
P3
φ
D0 //
I0
OO
M0
εD0φD1 //
I1
OO
M1
ε(M2)−1(D2)TφD2 //
I2
OO
M2
D2ε(M2)−1(D2)Tφ
I3
OO
M3
(D0)TM1εD0φ
(M0)−1
OO
M1εD0φ(D0)T
oo
(M1)−1
OO
(D2)Tφ
(M2)−1
OO
(D1)Too φ
(D2)Too
(M3)−1
OO
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 25 / 33
university-logo
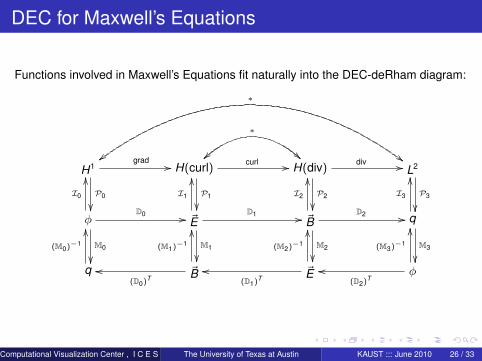
DEC for Maxwell’s Equations
Functions involved in Maxwell’s Equations fit naturally into the DEC-deRham diagram:
H1grad //
P0
∗
##H(curl) curl //
P1
∗
!!H(div)
div //
P2
L2
P3
φ
D0 //
I0
OO
M0
~ED1 //
I1
OO
M1
~BD2 //
I2
OO
M2
q
I3
OO
M3
q
(M0)−1
OO
~B(D0)T
oo
(M1)−1
OO
~E(D1)T
oo
(M2)−1
OO
φ(D2)T
oo
(M3)−1
OO
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 26 / 33
university-logo
Short Summary
Discrete Exterior Calculus analysis:DEC analysis is a general methodology for elucidating how to discretize PDEproblems, especially mixed problems with variables discretized on both primaland dual domain meshes.
In many cases, including the Poisson-Boltzmann equation and Maxwell’sequations, DEC analysis reveals alternative PDE discretization methods.
The robustness of such methods hinges on the choice of a discrete Hodge starand its inverse.
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 27 / 33
university-logo
Outline
1 Domain Modeling: Real Algebraic Finite Elements
2 Function Modeling: DEC-deRham Theory
3 Discrete Hodge Stars and Their Inverses
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 28 / 33
university-logo
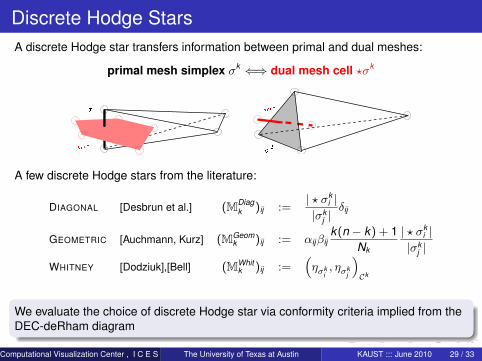
Discrete Hodge StarsA discrete Hodge star transfers information between primal and dual meshes:
primal mesh simplex σk ⇐⇒ dual mesh cell ?σk
A few discrete Hodge stars from the literature:
DIAGONAL [Desbrun et al.] (MDiagk )ij :=
| ? σki |
|σkj |
δij
GEOMETRIC [Auchmann, Kurz] (MGeomk )ij := αijβij
k(n − k) + 1Nk
| ? σki |
|σkj |
WHITNEY [Dodziuk],[Bell] (MWhitk )ij :=
(ησk
i, ησk
j
)Ck
We evaluate the choice of discrete Hodge star via conformity criteria implied from theDEC-deRham diagram
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 29 / 33
university-logo
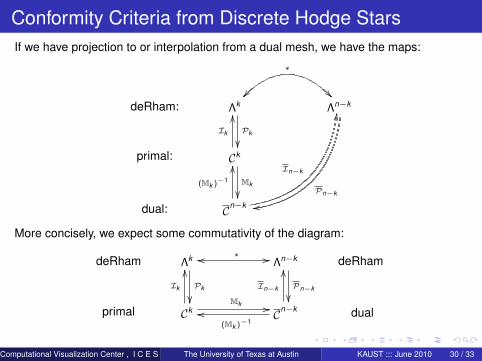
Conformity Criteria from Discrete Hodge StarsIf we have projection to or interpolation from a dual mesh, we have the maps:
deRham: Λk
Pk
∗
Λn−k
Pn−k
primal: Ck
Ik
OO
Mk
dual: Cn−k
(Mk )−1
OO In−k
MM
More concisely, we expect some commutativity of the diagram:
deRham Λk
Pk
oo ∗ // Λn−k
Pn−k
deRham
primal Ck
Ik
OO
Mk //Cn−k
(Mk )−1oo
In−k
OO
dual
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 30 / 33
university-logo
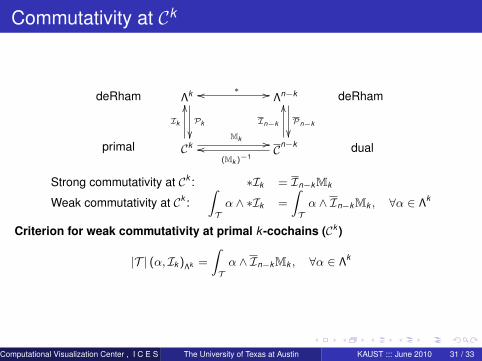
Commutativity at Ck
deRham Λk
Pk
oo ∗ // Λn−k
Pn−k
deRham
primal Ck
Ik
OO
Mk //Cn−k
(Mk )−1oo
In−k
OO
dual
Strong commutativity at Ck : ∗Ik = In−kMk
Weak commutativity at Ck :∫Tα ∧ ∗Ik =
∫Tα ∧ In−kMk , ∀α ∈ Λk
Criterion for weak commutativity at primal k -cochains (Ck )
|T | (α, Ik )Λk =
∫Tα ∧ In−kMk , ∀α ∈ Λk
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 31 / 33
university-logo
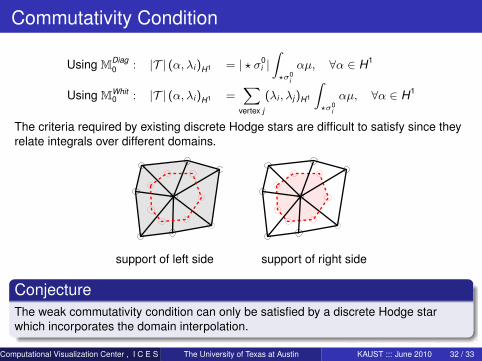
Commutativity Condition
Using MDiag0 : |T | (α, λi )H1 = | ? σ0
i |∫?σ0
i
αµ, ∀α ∈ H1
Using MWhit0 : |T | (α, λi )H1 =
∑vertex j
(λi , λj )H1
∫?σ0
i
αµ, ∀α ∈ H1
The criteria required by existing discrete Hodge stars are difficult to satisfy since theyrelate integrals over different domains.
support of left side support of right side
ConjectureThe weak commutativity condition can only be satisfied by a discrete Hodge starwhich incorporates the domain interpolation.
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 32 / 33
university-logo
Thank You / Shukran
Thanks for inviting us to visit
Slides available at http://www.ma.utexas.edu/users/agillette
Computational Visualization Center , I C E S (Department of Mathematics Institute of Computational Engineering and Sciences University of Texas at Austin )The University of Texas at Austin KAUST ::: June 2010 33 / 33