real-time robotic radiation oncology brian murphy electronic and computer engineering nui galway
TRANSCRIPT

Real-time Robotic Radiation Oncology
Brian Murphy
Electronic and Computer Engineering
NUI Galway
Overview
• Project Background• Aims• System Overview:
– Image Acquisition– Image Processing– Hardware– Demonstration Environment
• Final System

Project Background
• Radiation oncology is the study of tumors in a body and aims to find out about their development, diagnosis, treatment and prevention.

Project Background
• External beam radiation therapy is the most common type of radiation treatment.

Project Background
• Problems with external beam radiotherapy:– Tumor prone to movement.– Patient prone to movement.
• Problem with movement:– Higher area around the tumor must be exposed to
radiation to ensure that any movement of the tumor will lead to it being treated no matter where it moves to.
– Reduced dose of radiation.

Project Background
• Image Guided Radiation Therapy (IGRT).

Aims
• To prove that a radiation beam can track a moving tumor in real-time.
• To represent a tumor, a ball will be used and to simulate a radiation beam a laser beam will be used.
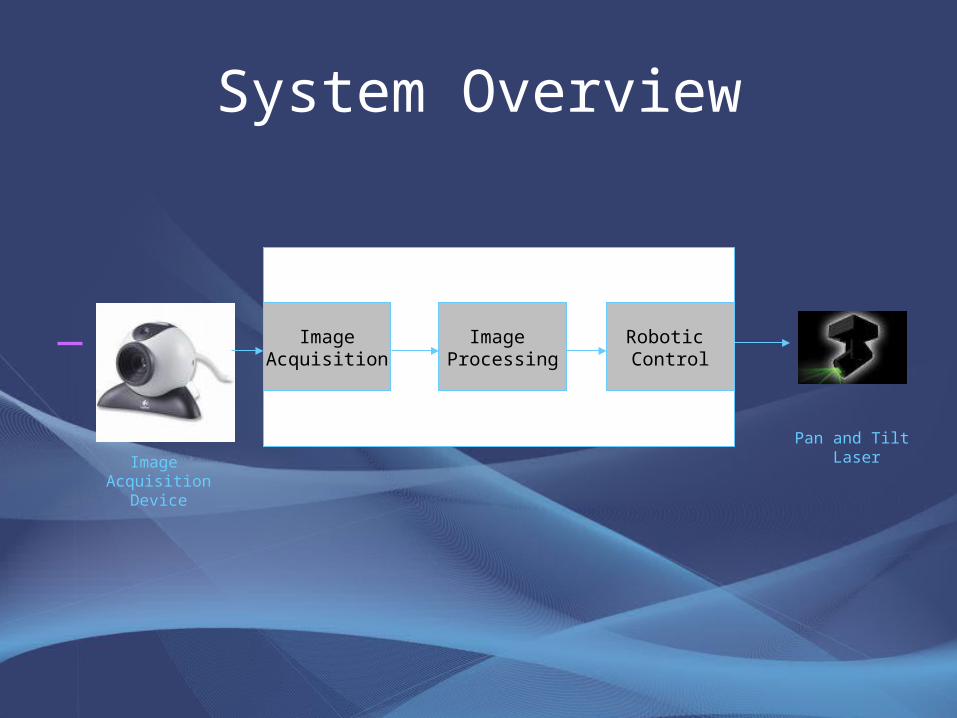
System Overview
ImageAcquisition
Image Processing
Robotic Control
Image Acquisition
Device
Pan and Tilt Laser

Image Acquisition
• Two parts to image acquisition:– Hardware
• Logitech Quickcam.
– Software• IMAQ Vision in Labview.

Image Processing
• Various edge detection techniques tried:– Canny Edge Detection.– Different Filter Types.
Canny EdgeDetection
Prewitt Filtering
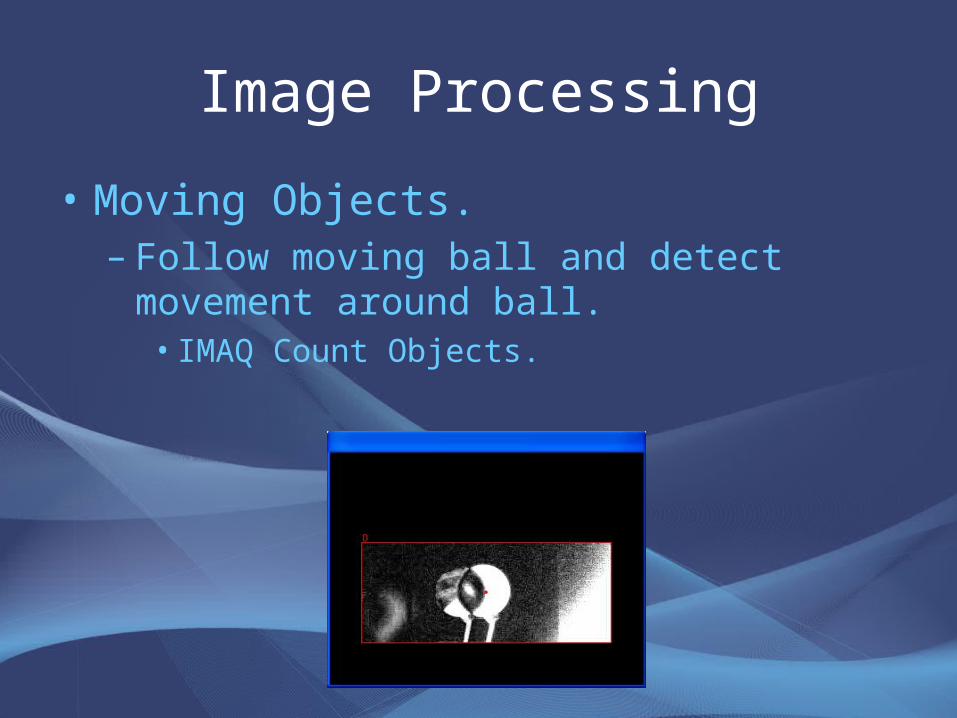
Image Processing
• Moving Objects.– Follow moving ball and detect movement
around ball.• IMAQ Count Objects.

Robotic Control
• The robotic control consists of two sections:– Hardware
• Pan and Tilt assembly and Parallax servo controller.
• Software– Interface with Labview.

Demonstration Environment
• Lego Mindstroms NXT Robotic Kit.
• Controls movement of the ball.
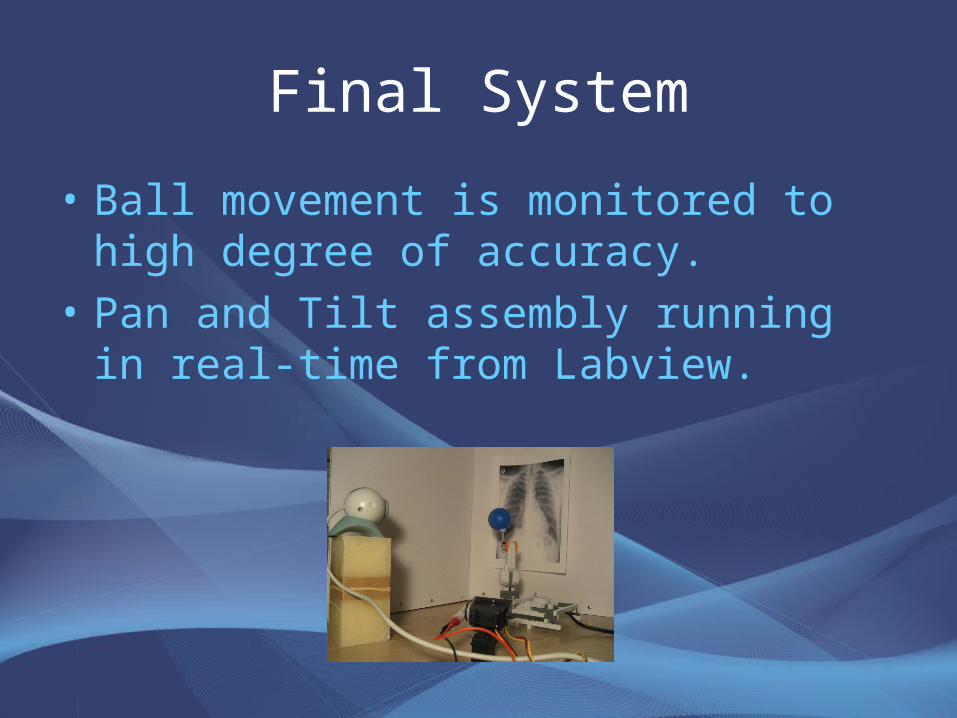
Final System
• Ball movement is monitored to high degree of accuracy.
• Pan and Tilt assembly running in real-time from Labview.

Questions?