recent progress on discrete dislocation dynamics … progress on discrete dislocation dynamics...
TRANSCRIPT

"Discrete Dislocation Plasticity" Cambridge
Thursday 1 July - Friday 2 July, 2004
Recent progress on discretedislocation dynamics simulations
Laboratoire d’Etude des Microstructures, CNRS-ONERAF-92322 Chatillon Cedex, FRANCE

Outline• A short review of DDD evolutions• 3D-DDD
– Piecewise line models– Materials specificity
• Slip system symmetry• Contact reactions (junctions)• Velocity laws• Standing problems
– Boundary Problems• PBC• Superposition or Eigenstrain methods ?
– Computational issues• Fast multipole methods (Greengard)• Parallelization
• 2D v.s. 3D and 2.5-DDD• Concluding remarks

1966� 1986 �����1992 1998������2D inplane 2D outplane 3D (lattice) 3D (continuous)
Patterning(1/ r)
Discrete Dislocation Dynamics main dates
HardeningLine tension
Obstacle pinning
“French touch”multi-slip
ASCI programbcc
1995 1998 �����2001 2003������Superposition Strong FE
couplingPBC //
Anisotropicelasticity
Boundaryproblem
Mean freepath Hardening
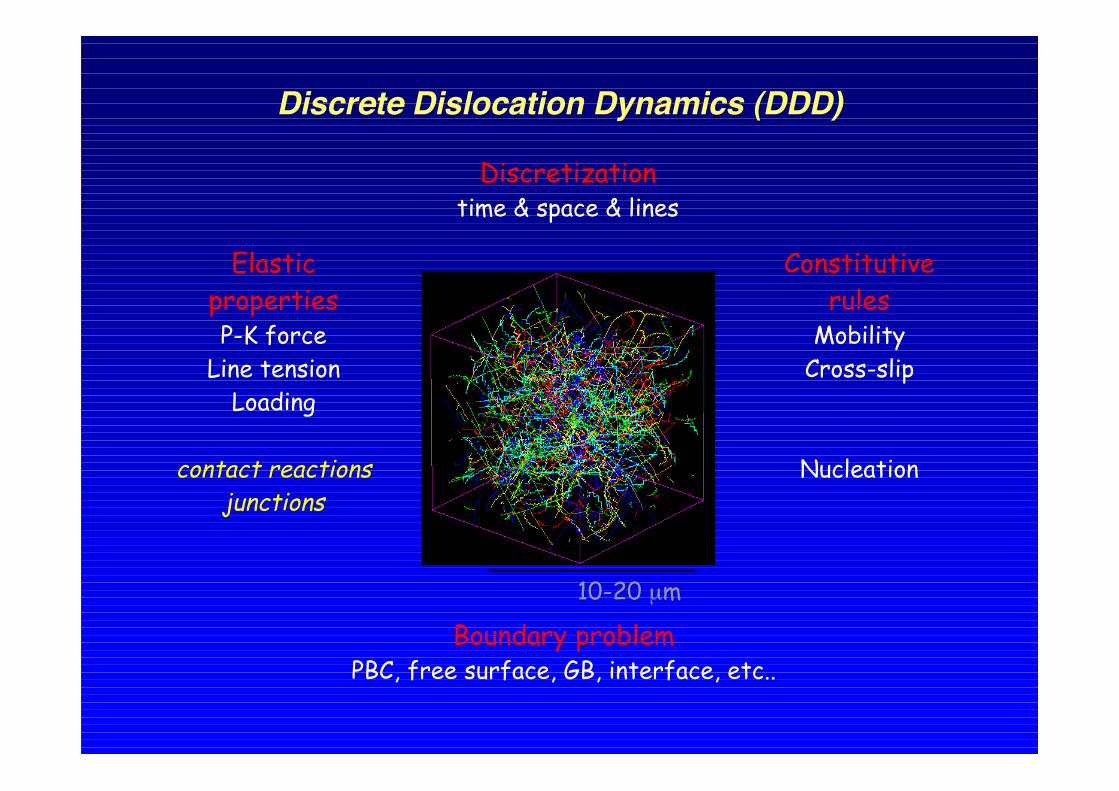
Discretizationtime & space & lines
ElasticpropertiesP-K force
Line tensionLoading
contact reactionsjunctions
Constitutiverules
MobilityCross-slip
Nucleation
10-20 µm
Discrete Dislocation Dynamics (DDD)
Boundary problemPBC, free surface, GB, interface, etc..

nm µm mm mSpace and line discretization
Lattice-based models Quasi-continuous models
(Forest zipping-unzipping) (Orowan mechanism)
MDDD
FE
Code simplicityslip properties
Dislocation self stress fieldCPU (time step ?)
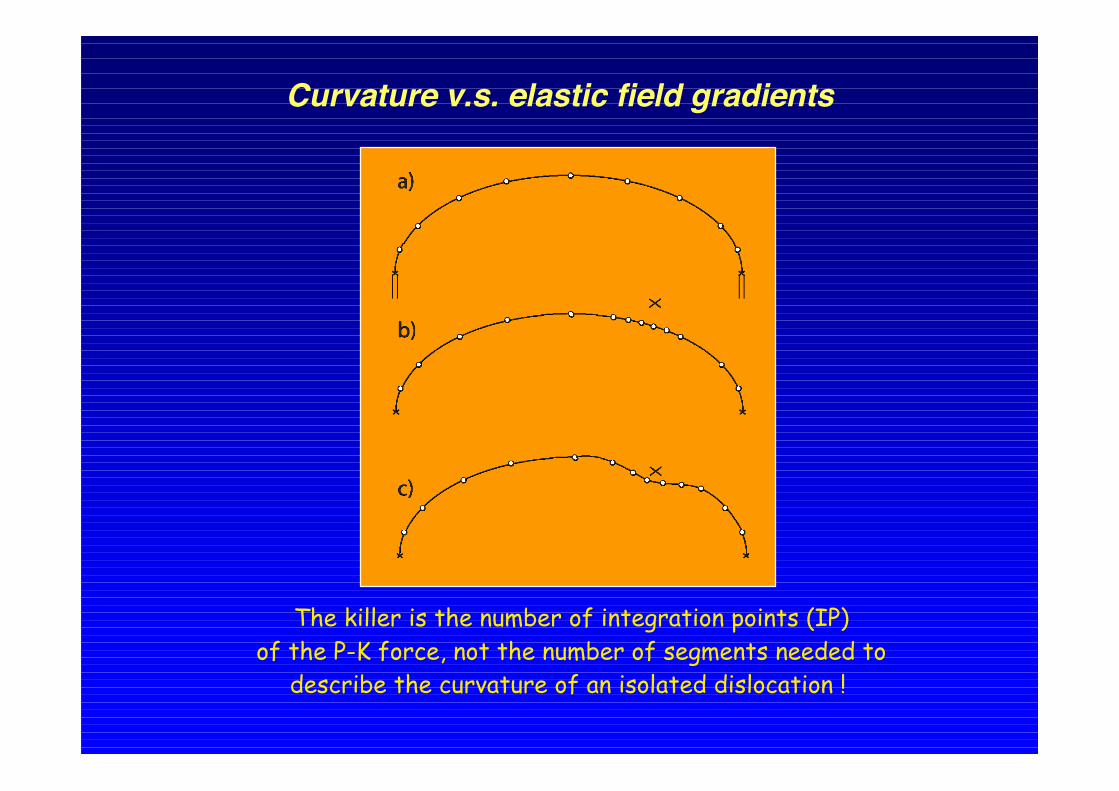
Curvature v.s. elastic field gradients
The killer is the number of integration points (IP)of the P-K force, not the number of segments needed to
describe the curvature of an isolated dislocation !
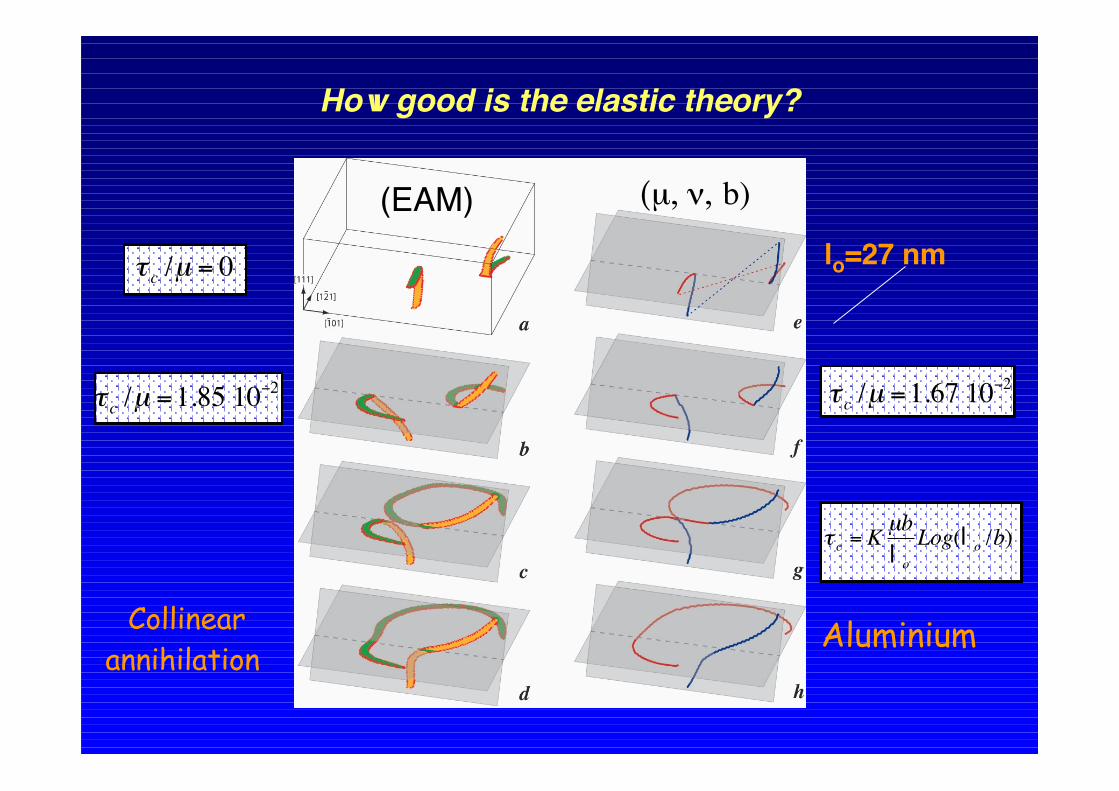
How good is the elastic theory?
€
τ c /µ =1.85 10−2
€
τ c /µ =1.67 10−2
lo=27 nm
€
τ c = K µbl o
Log(l o /b)
€
τ c /µ = 0
Aluminium
(EAM) (µ, ν, b)
Collinearannihilation

Contact reactions modeling
jonction CrossState
repulsion
IP optimization Line tension at triple nodes
Collinear annihilation

aij - Interaction coefficients - FCCs(model simulations)
Measurement:
a1copla: coplanar
a3: Lomera2: glissilea1ortho: Hirth
€
asu = (σ s / ρu
u∑ )2
Hirth (a1ortho= 0.051) Glissile (a2= 0.075) Lomer (a3= 0.084)
a0: self
b
b
b
b bb
c-s
a1coli: annihilation
acoli= 1.265

screw
edge
screw
edge
a1 a2
c
Vscrew << Vnon-screw
−
Δ−=
q
peff
o
o kTG
ll
vv )(1exp0
0
τ
τ
€
v0 = 1014s−1
ΔG0 = 1.06 eV : Total energy
τ0 = 260 MPa : CRSS at 0 K
p = 0.757, q = 1.075
Velocity laws
Eg: Zirconium (prismatic)
€
v =τ eff bB(T)
Viscous drag
Lattice friction
Segments length influence(double kink free path)
Internal stress fluctuations!

Technical standing problemsin dislocation properties modeling
• Cross-slip in non-fccs• Climb• Nucleation criteria• Transmission criteria• Jogs and kinks in materials with lattice friction• Over-damped motion approximation

Size effects (DDD+FE) Loading (DDD+FE)Bulk (DDD)
Boundary value problem
10µm
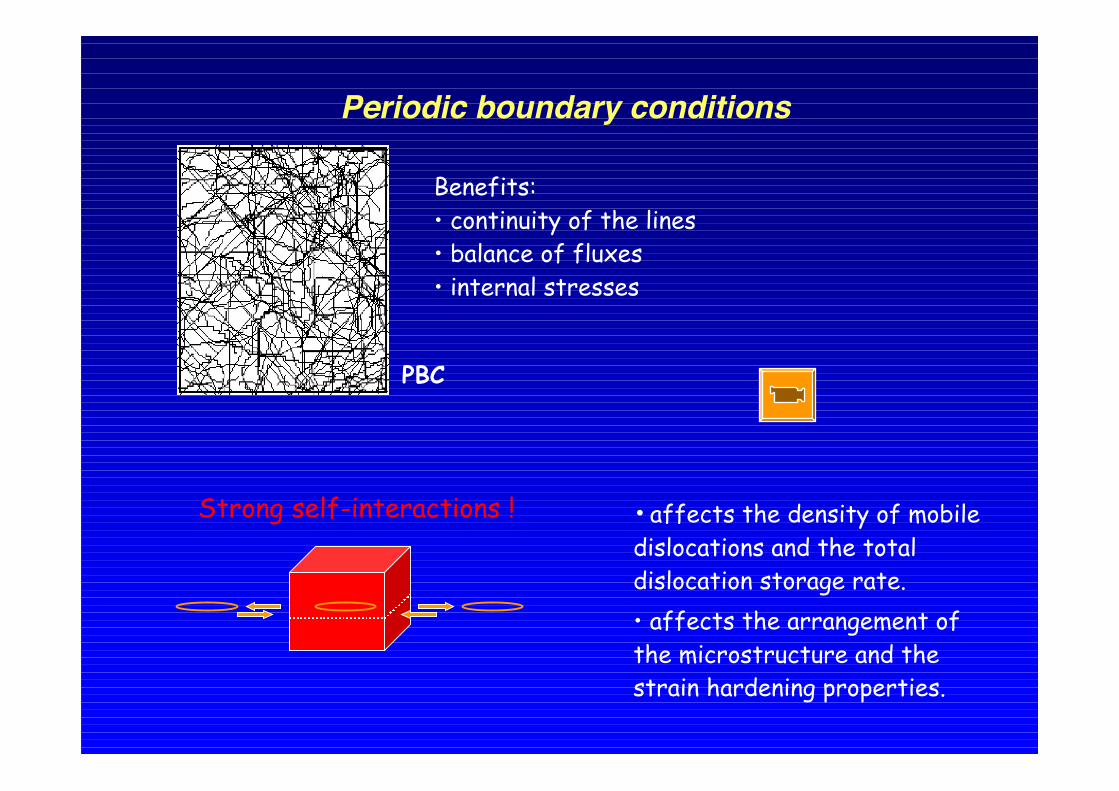
Benefits:• continuity of the lines• balance of fluxes• internal stresses
Periodic boundary conditions
PBC
Strong self-interactions ! • affects the density of mobiledislocations and the totaldislocation storage rate.• affects the arrangement ofthe microstructure and thestrain hardening properties.

This quantity must be calculated beforecomputations for each active slip systemT
Dislocation mean free path
€
huLx + kvLy + lwLz = 0
€
2λ = (uLx)2 +(vLy)2 + (wLz)2
self-annihilation distanceOrthorhombic box: Lx, Ly, Lz
Slip plane (h, k, l)
find 3 integers (u, v, w) such that
Isotropic Loop:
Anisotropic Loop:
€
λ =uLx
dx=
vLy
dy=
wLz
dzwith (dx,dy,dz) the fastgliding direction
(first-degree Diophantineequation)
(Madec, Devincre, Kubin:IUTAM 2003 proceedings, Kluwer Eds.)
(Monnet, Devincre, Kubin: Acta Mater. 2004)
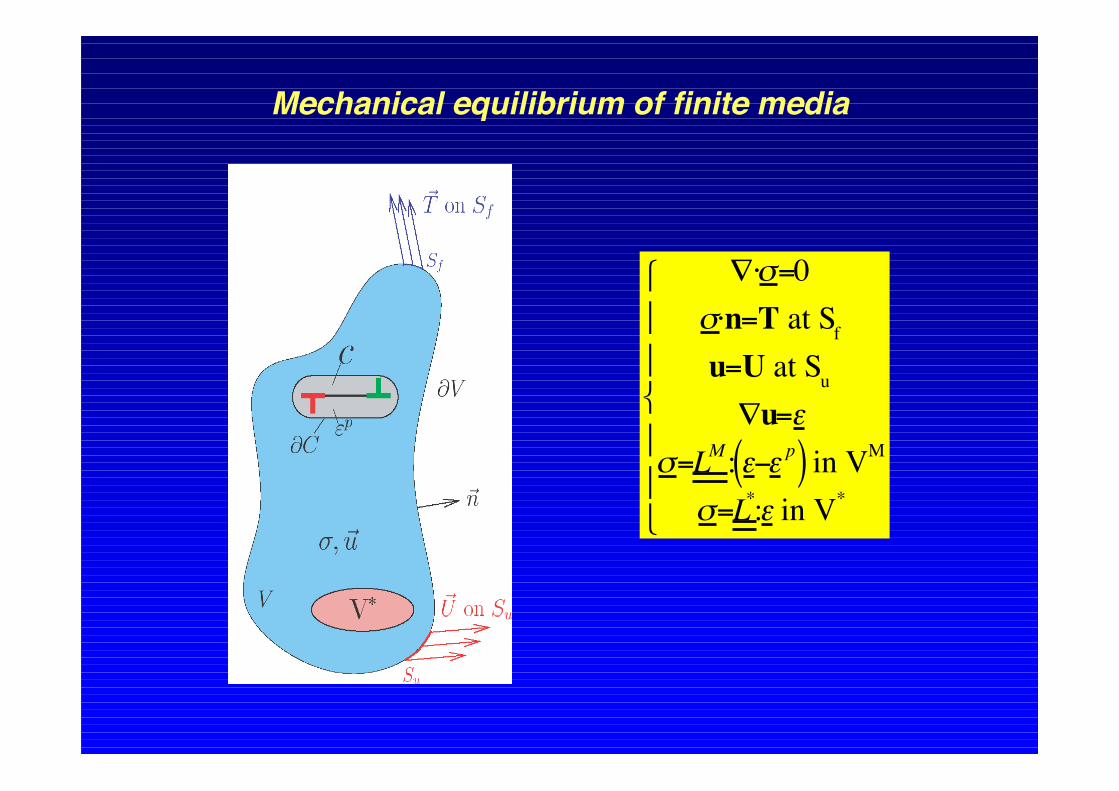
Mechanical equilibrium of finite media
€
∇⋅σ=0σ⋅n=T at Sf
u=U at Su
∇u=εσ=LM : ε−ε p( ) in VM
σ=L*:ε in V*
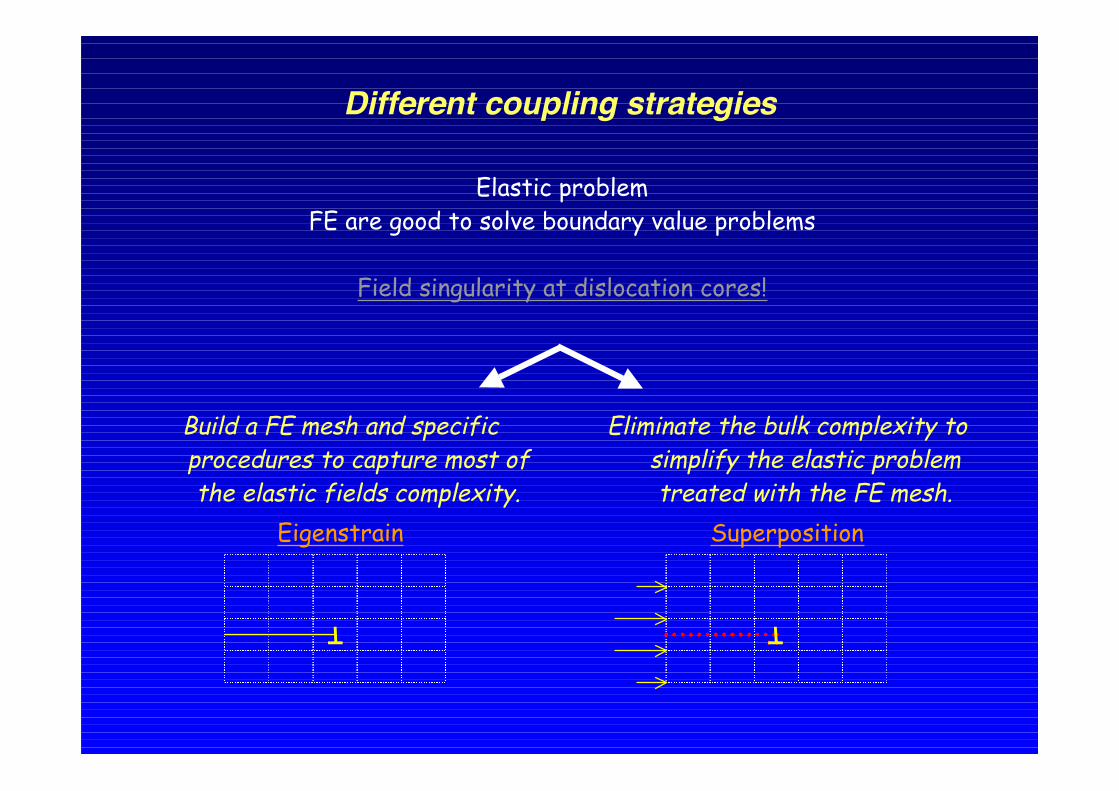
Different coupling strategies
Build a FE mesh and specificprocedures to capture most ofthe elastic fields complexity.
Eigenstrain
Eliminate the bulk complexity tosimplify the elastic problemtreated with the FE mesh.
Superposition
Elastic problem FE are good to solve boundary value problems
Field singularity at dislocation cores!
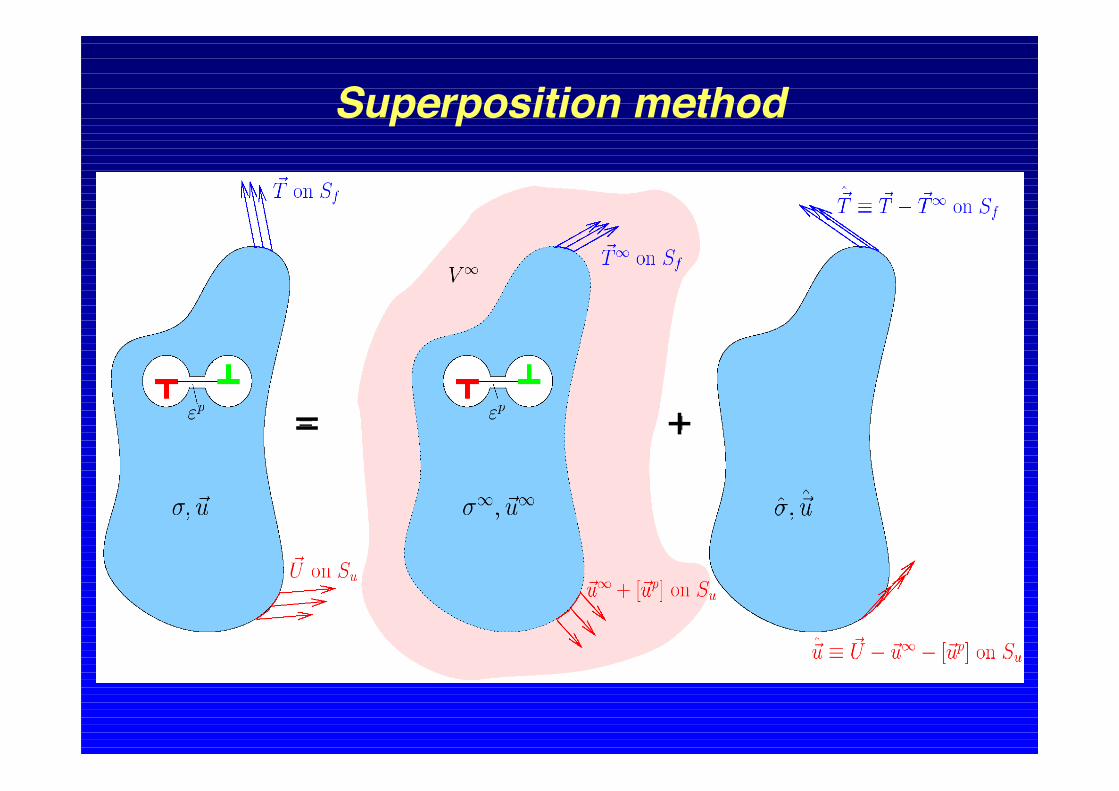
Superposition method
€
∇⋅ ˆ σ =0ˆ σ ⋅n=T−σ∞⋅n at Sf
ˆ u =U−u∞- up[ ] at Su
∇ ˆ u =ˆ ε ˆ σ =LM :ˆ ε in VM
ˆ σ =L*:ˆ ε +(L*−LM):ε∞ in V*
= +

Eigenstrain (homogenisation) method
bb Plastic strain induced by the
motion of each segment "i” atthe Gauss points ",e" of the FE
mesh and at time "t"
€
Δγn,ei =
bi/h( ) Vint,ei
VG,e
Δε,ep= Δγn,e
i
i∑ li⊗ni( )
sym
ε,ep= Δε,e
p
t∑
Homogenisation slab ofthickness h=1.5 (VG,e)1/3
is OK with elements of 20nodes and 27 Gauss points.

Strength and weakness of DDD-FE coupling
• Computer efficiency!– FE computations are faster than DDDs
• Isotropic or anisotropic elasticity !– Analytical forms for the displacement field
• Large deformation and surface roughness !– homogenisation or re-meshing
• Elastic inclusions !• Interpolation and shape functions!
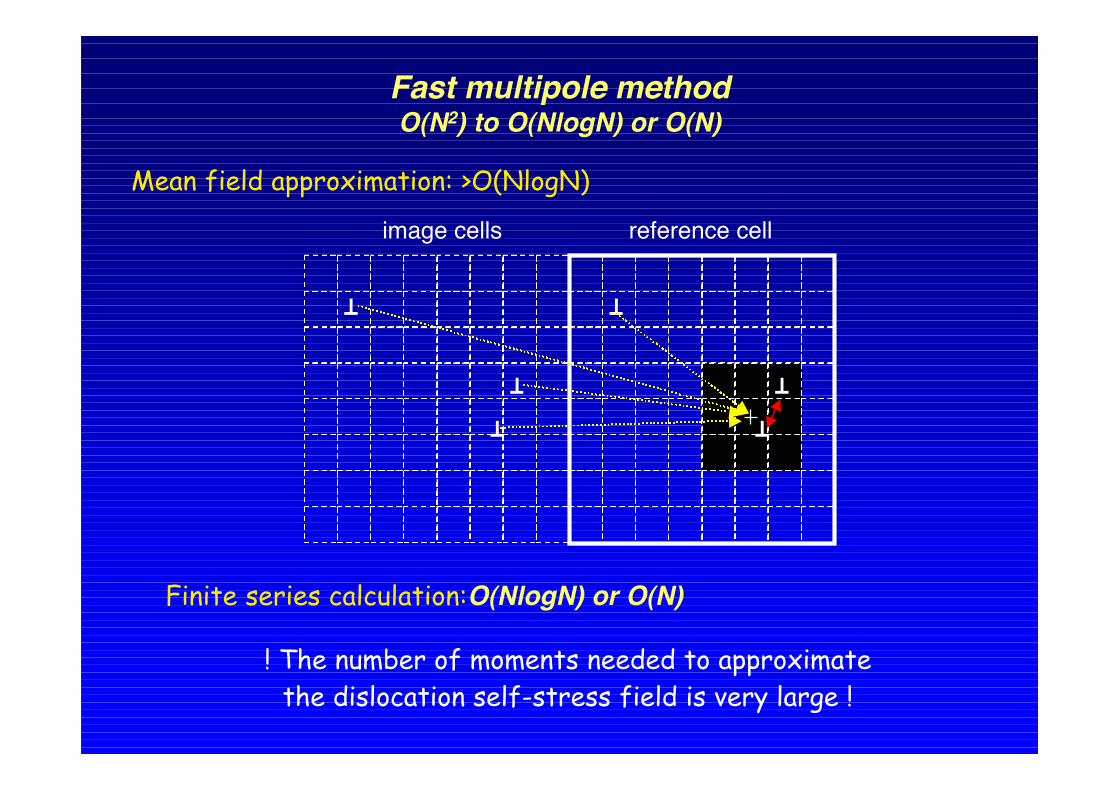
Fast multipole methodO(N2) to O(NlogN) or O(N)
reference cellimage cells
Mean field approximation: >O(NlogN)
Finite series calculation:O(NlogN) or O(N)
! The number of moments needed to approximatethe dislocation self-stress field is very large !

Parallel DDD codes
The LLNL battlefield :-)Size of dislocation patterns approx 1µm
Simulation box L=10µm
Dislocation density ρ=1012m-2
Length of dislocation line Γ=ρL3=10-3m
Discretization length d=10 nm
Number of segments N=Γ/d=105
One processor can only handle efficiently 103-104 segments
•2D simulations are quite rough but they can be helpful to overcomepartially the numerical limitations of the 3D computations.
•On the other hand, 3D codes can be used to evaluate, in arealistic way, the dislocation mechanisms which cannot bereproduced by a 2D system (multiplication, cross-slip, pinningmechanisms strength...)
2D codesEasier
higher ε availableQualitative
3D codesQuantitative
More complicated to developOnly small strains
2D versus 3D

Dislocation patterning in double slip
s
Multiplication
Reactions
Dipoles
Junctions
Interaction
Velocity
Annihilation
homogenization(cross-slip)
€
τint ,τapp,T( )€
τ j =βT
=βµbρlocal−1/2 ln(
ρlocal−1/2
b)
€
Δρs
Δt= M˙ γ s + Sources
2.5 DDD simulation
(3D-DDD)€
M = 2.1015
€
β = 0.046

€
h =dσdε
=dσdρ
dρdε
Forest modeland
Strain hardeningflow stress - junction strengthening multiplication rate - recovery
2.0
1.5
1.0
0.5
0.0τ/
µ (
10−3
)0.350.300.250.200.150.100.050.00
b/λ (10−3)
2.0
1.5
1.0
0.5
0.0τ/
µ (
10−3
)0.350.300.250.200.150.100.050.00
b/λ (10−3)
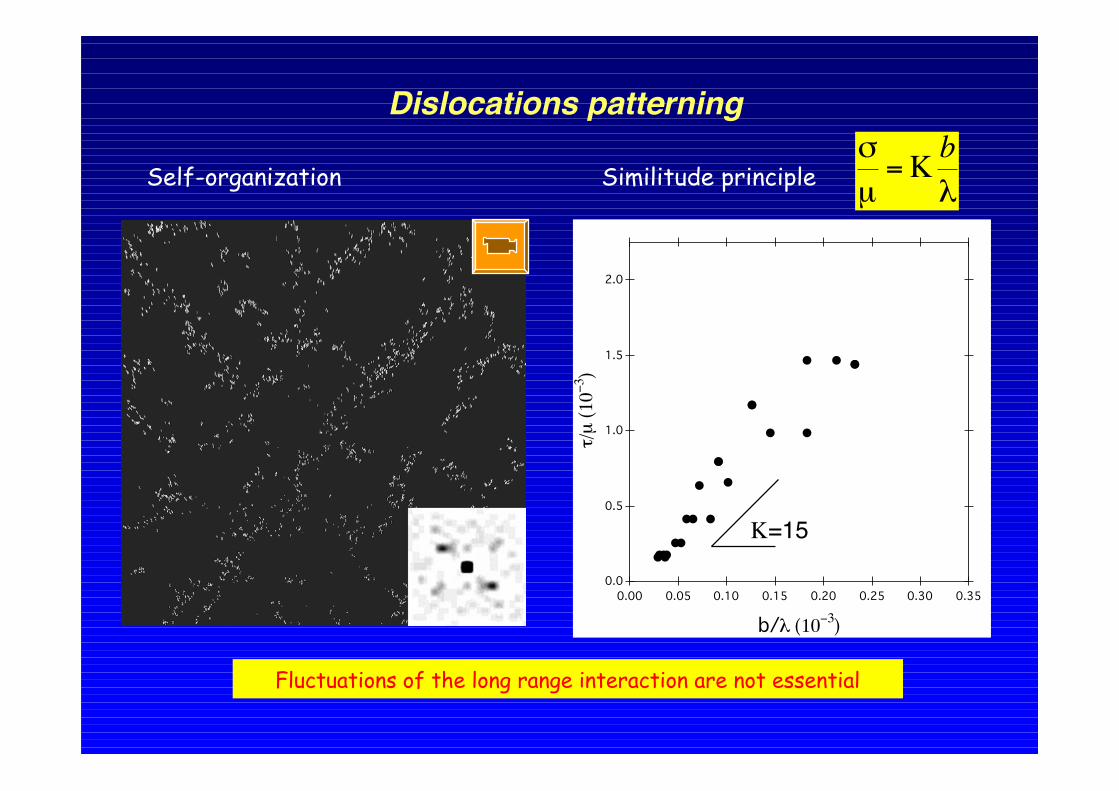
€
σµ
=K bλ
K=15
Similitude principle
Dislocations patterning
Self-organization
Fluctuations of the long range interaction are not essential
Concluding remarks
• The elastic theory of dislocations is powerful• Material specificities are coming up from the core properties• PBC are useful, but dangerous• Solving boundary value problems in 3D is a tough job, still in
progress.• Thanks to multipole algorithm and // codes, larger plastic
strains should be available in the near future.• Need for a rigorous validation and intercomparison of the
various approaches currently utilized.