recovery strategy for the gray ratsnake (pantherophis spiloides
TRANSCRIPT

1
Optical Memory and Neural Networks, v. 12, No. 1, 2003
Nonlinear filters for image processing in neuro-morphic parallel networks
Leonid P. Yaroslavsky
Department of Interdisciplinary Studies,
Faculty of Engineering, Tel Aviv University,
Tel Aviv 69978, Israel ABSTRACT A wide class of nonlinear filters for image processing is outlined and described in a
unified way that may serve as a base for the design of their implementations in
optoelectronic programmable parallel image processors. The filters are treated in
terms of a finite set of certain estimation and neighborhood building operations. A set
of such operations is suggested on the base of the analysis of a wide variety of
nonlinear filters described in the literature.
Key words: Image Processing, Nonlinear Filters, Optoelectronic processors 1. Introduction
Since J.W. Tukey introduced median filters in signal processing ([1]), a vast
variety of nonlinear filters and families of nonlinear filters for image processing has
been suggested. The remarkable feature of these filters is their inherent parallelism.
This motivates attempts to develop unification and structurization approaches to
nonlinear filters to facilitate filter analysis, usage and design. In this paper, a
structurization and unification approach to image processing filters based on
fundamental notions of signal sample neighborhood and estimation operations over
the neighborhood aimed at filter implementation in parallel computing networks is

2
suggested and outlined.
Throughout the paper, we will assume that images are single component signals
with scalar values. We will assume also that images are digitized i.e they are
represented as sequences of integer valued (quantized) numbers.
The exposition is arranged as following. In Sect. 2 main assumptions and
definitions are introduced. Then, in Sects. 3-5, respectively, listed and explained are:
typical pixel and neighborhood attributes, typical estimation operations involved in
the filter design and typical neighborhood building operations that were found in the
result of analysis of a large variety of nonlinear filters known from literature ([2-10]).
In Sect. 6 classification tables of the filters are provided in which filters are arranged
according to the order and the type of neighborhood they use. Iterative, cascade and
recursive implementation of filters are reviewed in Sects. 7 and 8. Sect. 9 illustrates
some new filters that naturally follow from the classification and in Sect. 10 filter
implementation in parallel neuro-morphic structures is briefly discussed.
2. Main definitions
Main assumptions that constitute the suggested unified and structurized treatment
of nonlinear filters are:
• Filtering is performed within a filter window.
• In each position k of the window, with k being a coordinate in the signal
domain, filters generate, from input signal samples kb within the window an
output value ka for this position by means of a certain estimation operation
ESTM applied to a certain subset of window samples that we will call a
neighborhood of the window central sample:
(((( ))))NBHa:ab kkk ESTM====→→→→

3
• The neighborhood is formed on the base of window sample attributes (to be
discussed in Sect.3). The process of forming neighborhood may, in general, be
multi stage one beginning from the initial W-neighborhood (Wnbh) formed from
filter window samples through a series of intermediate neighborhoods.
Intermediate neighborhoods may, in addition to its pixel attributes, have attributes
associated with the neighborhood as a whole and obtained through an estimation
operation over the neighborhood.
• Nonlinear filters can be specified in terms of neighborhood forming and
estimation operations they use
This concept is schematically illustrated in a flow diagram of Fig. 1. Filter
window samples with their attributes form a primary “window neighborhood” Wnbh.
On the next level, this first level neighborhood NBH1 is used to form, through a
number of neighborhood building operations such as shown in Fig. 1 grouping and
intermediate estimation operations, a second level neighborhood NBH2 which, in this
illustrative example, is used for generating, by means of an estimation operation, filter
output pixel for this particular position of the window. It is only natural to associate
the filter output in each position of the window with the central pixel of the window.
We will outline typical attributes of pixels and and principles of neighborhood
formation in Sect. 3 and 5, respectively.
3. Typical signal attributes
Natural primary signal sample attributes that determine filtering operations are
pixel values (magnitudes) and their co-ordinates. It turns out, however, that a number
of attributes other then only primary ones are essential for nonlinear filtering. Table 1
lists typical digital signal sample attributes that are involved in the design of nonlinear

4
filters known from the literature. As one can see from the table, these “secondary”
attributes reflect features of pixels as members of their neighborhood.
Attributes Rank and Cardinality reflect statistical properties of pixels in
neighborhoods. They are interrelated and can actually be regarded as two faces of the
same quality. While Rank is associated with variational row, i.e ordered in ascending
order sequence of neighborhood pixel values, Cardinality is associated with the
histogram over the neighborhood.
“Geometrical” attributes describe properties of images as surfaces in 3-D
spaces, respectively. Membership in neighborhood and Spatial connectedness are
binary 0/1 attributes that classify topological relationship between a given signal
sample and a neighborhood. Neighborhood elements are regarded spatially connected
if one can connect them by a line that passes through the samples that all belong to the
neighborhood.
This list of signal attributes does not pretend to be complete. Rather, it reflects
the state of the art and may suggest directions for further extensions.
4. Estimation operations
Typical estimation operations used in known nonlinear filters are listed in
Table 2. In the filter design, selection of estimation operation is, in general, governed
by requirements of statistical or other optimality of the estimate. For instance, MEAN
is an optimal MAP- (Maximal A Posteriori Probability) estimation of a location
parameter of data in the assumption that data are observations of a single value
distorted by an additive noncorrelated Gaussian random values (noise). It is also an
estimate that minimizes mean squared deviation of the estimate from the data. PROD
is an operation homomorphic to the addition involved in MEAN operation: sum of

5
logarithms of a set of values is logarithm of their product.
ROS operations may be optimal MAP estimations for other then additive
Gaussian noise models. For instance, if neighborhood elements are observations of a
constant distorted by addition to it independent random values with exponential
distribution density, MEDN is known to be optimal MAP estimation of the constant.
It is also an estimate that provides minimum to average modulus of its deviation from
the data. If additive noise samples have one-sided distribution and affect not all data,
MIN or MAX might be optimal estimations. MODE can be regarded an operation
of obtaining MAP estimation if distribution histogram is considered a posteriori
distribution of a parameter (for instance, signal gray level). RAND is a “stochastic”
estimation operation. It generates an estimate that, statistically, is equivalent to all
above “deterministic” estimates. All these estimation operations belong to a class of
“smoothing” operations SMTH since they result in data smoothing.
SPRD are operations that evaluate neighborhood data spread. Its two
modifications, “inter-quantil distance” IQDIST and “range” RNG ones, are
recommended as a replacement for standard deviation for the evaluation of spread of
data with non Gaussian statistical distribution. SIZE operation computes number of
samples that constitute the neighborhood (when it does not directly follows from the
neighborhood definition). In application to image nonlinear filtering, this operation is
less known than above ones. We will illustrate in Sect. 9 how its use can improve
efficiency of some known filters.
5. Neighborhood building operations
Neighborhood building operations can be unified in two groups: operations
that generate a scalar attribute of the neighborhood as a whole (“scalar” operations)
6
and those (vectorial) that are used in multi stage process of forming neighborhood.
The latter generate, for neighborhood elements, a new set of elements with their
attributes that form a neighborhood of the next stage. “Scalar” operations are basically
the same as those listed in Table 2. Typical vectorial operations are listed in Table 3.
One can distinguish three groups of vectorial neighborhood building
operations: functional element-wise transformations, linear combinations and
grouping/selection operations. Functional transformations are nonlinear functions
such as, for instance, logarithmic one, applied, element-wise, to all neighborhood
elements. MULT-operations assume multiplying neighborhood elements by scalar
“weight” coefficients that are selected according certain attributes (co-ordinates,
value, rank, cardinality), or combination of attributes. Replication REPL-operations
can be regarded as a version of weighting with integer weights and are used in data
sorting. A special case of replication are SELECT_A operations that select from the
neighborhood some elements (replication factor 1) and neglect others (replication
factor 0). In particular, shape-neighborhoods are formed by selection from the filter
window pixels those that form a certain special spatial shape, such as, for instance,
cross, diagonal, etc. Other examples of sub-neighborhoods formed by feature
controlled selection of neighborhood elements are shown in the table EV-, KNV-, ER-
, KNR-,Q-, CL-, FLAT-neighborhoods.
Linear combination operations multiply neighborhood elements by a matrix
and/or add/subtract a constant. Although the matrix can, in principle, be arbitrary,
orthogonal transform matrices are used in known filters.
6. Classification tables of the filters
In tables 4-7, nonlinear filters are represented grouped according to the

7
number of stages in building neighborhood they use for generating final estimation of
the filter output. The tables do not pretend to contain all filters that have been
published by now. They are mostly based on data collected in Ref.[9] as well as in
Refs. [3, 4, 8, 9, 10] to which readers can refer for detailed information regarding
properties and applications of the filters.
Table 4 lists the simplest nonlinear filters that use one-stage NBH1
neighborhood, the primary window Wnbh-neighborhood. In particular, one can find
in the table such popular in signal and image processing filters as moving average,
median and local histogram equalization filters.
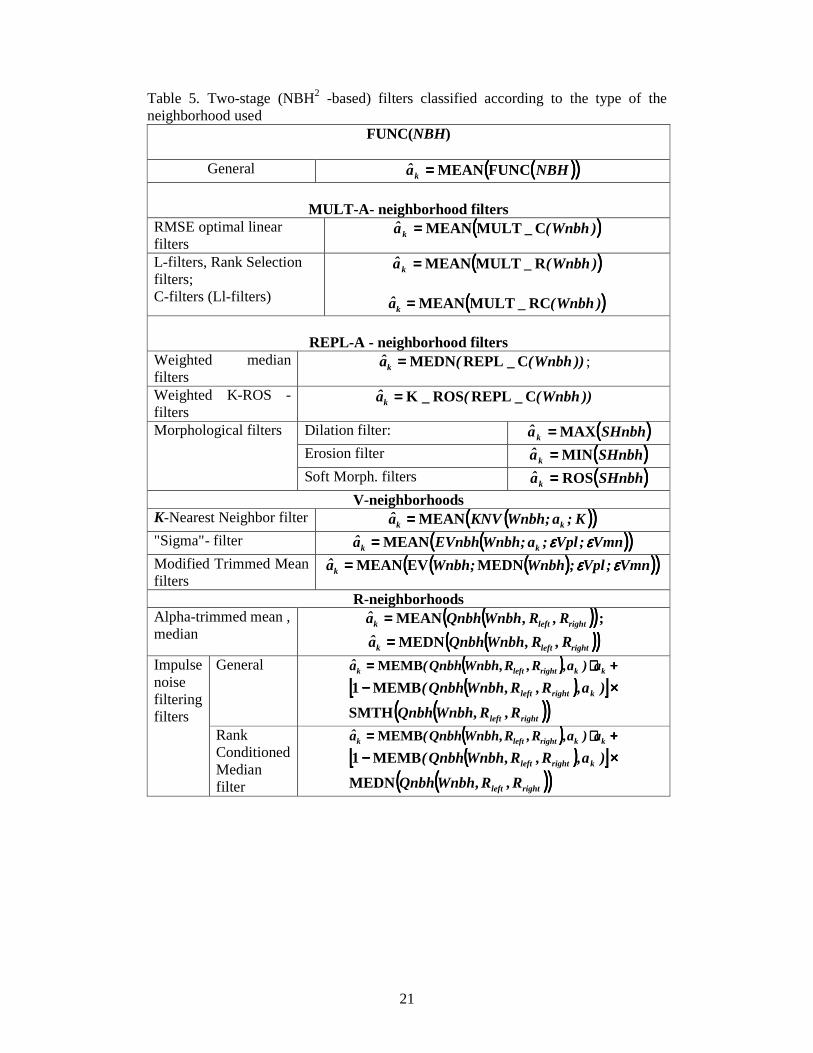
It appears that the majority of known nonlinear filters belong to the family of
two-stage NBH2 neighborhood filters listed in table 5. According to the type of the
NBH2-neighborhood used, the filters form four groups: MULT_A-, REPL_A-, V-,
and R-neighborhood filters. Some of them such as root mean square error (RMSE)
optimal linear, L- and C-filters are, in fact, families of filters.
Among three-stage neighborhood filters listed in Table 6 one can find two
large families of filters: transform domain filters and stack filters. Transform domain
filters nonlinearly modify transform coefficients of filter window samples to generate
filter output by means of applying to them operation MEAN which is an
implementation of the inverse transform for the window central sample. Two the most
advanced modifications of these filters are sliding window DCT ([8,11]) and wavelet
shrinkage filters ([12]). A popular in signal/image processing community Local
Linear Minimum Mean Square Error filter is a special case of transform domain filters
in which signal squared transform coefficients (((( )))) 2T Wnbh (signal spectral
estimations) are replaced by their mean values (((( ))))(((( ))))2STD Wnbh .
Stack filters are yet another large family of filters. They originate from the

8
idea of threshold decomposition of multilevel signals to binary signals to which
boolean functions are then applied ([13]).
Four stage neighborhood filters are exemplified in Table 7 by a family of
polynomial filters and by Weighted Majority of m Values with Minimum Range
(Shorth-) filter that implement an idea of data smoothing by averaging over data
subset that has minimal spread.
7. Iterative filtering.
An important common feature of the nonlinear filters is their local adaptivity:
the way how filter output is computed depends, in each filter window position, on
window sample attributes. In order to understand in what sense filters provide an
optimal estimate of signals one can assume that signal processing quality is evaluated
locally as well. Mathematical formulation of this assumption is provided by local
criteria of processing quality ([8]):
(((( )))) (((( )))) (((( ))))
==== ∑∑∑∑
mmmk a,aLOSSa;mLOCAVkAVLOSS
Here AVLOSS(k) is, for a signal sample with coordinate k, averaged value of losses
(((( ))))mm a,aLOSS due to replacement, by filtering, of signal “true” values {{{{ }}}}ma in
coordinates {{{{ }}}}m within the window by their estimates {{{{ }}}}ma . The averaging is two
fold. “Spatial” averaging is, in general, a weighted summation carried out over a
subset of signal samples associated with central sample k of the window (its
neighborhood NBH ). The neighborhood is defined by a locality function
(((( ))))ka;mLOC . To specify the locality function, one should, in principle, determine
“true” value ka of the central sample:

9
(((( )))) (((( )))) {{{{ }}}} (((( )))) ∈∈∈∈≠≠≠≠
====otherwise,
kNBHmif,a;mWa;mLOC k
k 00
,
where (((( ))))ka;mW are weight coefficients.
“Spatial” averaging may, in general, be supplemented with a “statistical”
averaging AV over stochastic factors involved (such as sensor’s noise, signal
statistical ensemble and alike). For such criteria, optimal processing algorithm is the
algorithm that provides minimum to averaged losses:
(((( ))))(((( )))) (((( ))))
==== ∑∑∑∑
→→→→ mmmk
abM
optk a,aLOSSa;mLOCAVminarga
where {{{{ }}}}nmbb ,==== is vector of observed signal pixels and (((( ))))abM ˆ→→→→ is a processing
algorithm.
It follows from such a formulation that optimal processing algorithm depends
on signal true values that are required to specify the locality function. For these values
are not known and are the goal of the processing, this implies that optimal estimation
algorithm should, in principle, be iterative:
(((( )))) (((( ))))(((( ))))1ESTM −−−−==== ttk NBHa
where t is iteration index. In iterative filtering, filters are supposed to converge to
“true” values. Therefore, in particular applications, filters should be selected
according to their “root” signals (fixed points).
Experimental experience shows that iterative nonlinear noise cleaning filters
substantially outperform non-iterative ones. Figs. 2 illustrates the work of some of the
filters. Some additional illustrations one can find in [13].
8. Multiple branch parallel, cascade and recursive filters

10
An important problem of iterative filtering is that of adjustment of
neighborhood building and estimation operations according to changing statistics of
data that takes place in course of iterations. This may require iterative wise change of
the filter parameters. One of the possible solutions of the problem is to combine in
one filter several filters acting in parallel branches and switch between them under
control of a certain auxiliary filter that evaluates the changing statistics.
Modification of the estimation and neighborhood building operations can also
be implemented in cascade filtering when each filter in cascade operates with its own
neighborhood and estimation operation. Note also, that, from classification point of
view, one can treat cascade filters as an implementation of hierarchical multiple stage
neighborhood filters. Several examples of cascade filters are listed in Table 8.
Computational expenses associated with iterative and cascade filtering in
conventional sequential computers can be reduced by using, as window samples in the
process of scanning signal by the filtering window, those that are already estimated in
previous positions of the window. Two examples of recursive filters are shown in
Table 9. Recursive filters are not relevant for parallel implementation.
9. Some new filters that emerge from the structurization and unification
approach
The presented approach to the nonlinear filter unification eases analysis of
structure of nonlinear filters by reducing it to the analysis of what type of
neighborhood, neighborhood building and estimation operations they use. This
analysis may also lead to new filters that “fill in” logical niches in the classification.
Several examples of such filters are given In Table 10.
“SizeEV-controlled Sigma”-filter improves image noise cleaning capability

11
of the “sigma”-filter (Table 5). Original “Sigma” filter tends to leave untouched
isolated noisy pixels (Fig. 2c). EV-neighborhood of these pixels is very small in size
since they substantially deviate from their true values. In “SizeEV-controlled
Sigma”-filter size of EV-neighborhood is computed and, if it is lower then a certain
threshold Thr, median over the window (or, in general any other of SMTH
operations) instead of MEAN(EV) is used to estimate window central pixel.
Size(Evnbh) is a useful attribute of EV-neighborhood that, by itself, can be used to
characterize image gray level local inhomogeneity (for example, as “an edge
detector”, as it is illustrated in Fig. 3, b)).
“Cardnl-filter” that generates image of local cardinality of its pixels can be
regarded as a special case of Size(Evnbh) filter for 0======== VmnVpl εεεεεεεε . It can be used
for enhancement of small gray level inhomogeneity of images that are composed of
almost uniformly painted patches (Fig. 3c)).
P-histogram equalization generalizes local histogram equalization which is its
special case for P=1. When P=0, P-histogram equalization results in automatic local
gray level normalization by local minimum and maximum. Intermediate values of P
allow flexible image local contrast enhancement. One of the immediate applications
of P-histogram equalization is image dynamic range blind calibration. EV- , KNV-
and SH-neighborhood equalizations represent yet another generalization of the local
histogram equalization algorithm when it is performed over neighborhoods other then
initial window neighborhood. One can compare conventional local histogram
equalization and EV-neighborhood equalization on Fig. 4. Some additional illustrative
examples one can find in [14].
V- and R- neighborhood based filters listed in Table 5 (K-Nearest Neighbor,
Sigma, Trimmed mean filters and alike) select from samples of the filter window

12
those that are “useful” for subsequent estimation operation by evaluation of their
“nearness” to the selected sample in terms of their gray levels and ranks. It certainly
may happen that the resulting neighborhood will contain samples that are not spatially
connected to the center of the neighborhood. One can refine such a selection by
involving an additional check-up for spatial connectivity of neighborhood elements
which is of especial importance in image filtering applications. An improved image
denoising capability of such filters was recently reported in ([17]).
10. Implementation issues
The suggested structurization of nonlinear filters for image processing implies
that a unified implementation of the filters is possible in dedicated programmed
parallel signal processors. The most natural way is to implement the filters in multi
layer parallel networks with neuro-morphic structure. Each level of such a network is
an array of elementary processors that implement estimation operations and are
connected with corresponding sub-arrays of processors on the previous layer that form
their neighborhood. The processors in each layer work in parallel and process
“neighborhood” pixels formed on the previous layer to produce output for the next
level or finally, general filter output (Fig. 5). Modern advances in “smart pixel arrays”
promise a possible electronic implementation. Another option is associated with opto-
electronic implementations that are based on the natural parallelism of optical
processors ([15]).
Figs. 6 and 7 represent illustrative examples of multi-layer networks for
computing pixel attributes and forming pixel neighborhood. The networks are
designed on the base of look-up-tables and summation units as elementary processors.
Note that the network for computing pixel rank (Fig. 6) can by itself serve as a filter

13
RANK(NBH).
11. Conclusion
It is shown that concepts of signal sample neighborhoods, estimation and
neighborhood building operations provide a unified framework for structurization and
classification of image processing nonlinear filters oriented on their implementation in
parallel multi-layer neuro-morphic networks. Many of the introduced concepts are
applicable for multi component signals such as color or multi spectral images as well,
although exhaustive extension of the approach to multi component signals requires
additional efforts.
12. Acknowledgement
The work was partly carried out at Tampere International Center for Signal
Processing, Tampere University of Technology, Tampere, Finland

14
13. References
1. J. W. Tukey, Exploratory Data Analysis, Addison Wesley, 1971
2. J. Serra, Image Analysis and Mathematical Morphology, Academic Press, 1983,
1988
3. V. Kim, L. Yaroslavsky, “Rank algorithms for picture processing”, Computer
Vision, Graphics and Image Processing, v. 35, 1986, p. 234-258
4. I. Pitas, A. N. Venetsanopoulos, Nonlinear Digital Filters. Principles and
Applications. Kluwer, 1990
5. E. R. Dougherty, An Introduction to Morphological Image Processing, SPIE
Press, 1992
6. H. Heijmans, Morphological Operators, Academic Press, 1994
7. E. R. Dougherty, J. Astola, An Introduction to Nonlinear Image Processing, SPIE
Optical Engineering Press, 1994
8. L. Yaroslavsky, M. Eden, Fundamentals of Digital Optics, Birkhauser, Boston,
1996
9. J. Astola, P. Kuosmanen, Fundamentals of Nonlinear Digital Filtrering, CRC
Press, Roca Baton, New York, 1997
10. E., Dougherty, J. Astola, Nonlinear Filters for Image Processing, Eds., IEEE
publ., 1999
11. L.P. Yaroslavsky, K.O. Egiazarian, J.T. Astola, “Transform domain image
restoration methods: review, comparison and interpretation”, Photonics West,
Conference 4304, Nonlinear Processing and Pattern Analysis, 22-23 January,
2001, Proceedings of SPIE, v. 4304.
12. D. L. Donoho, I.M. Johnstone, “Ideal Spatial Adaptation by Wavelet Shrinkage”,
Biometrica, 81(3), pp. 425-455, 1994
15
13. P. D. Wendt, E. J. Coyle, and N. C. Gallagher, Jr., “Stack Filters”, IEEE Trans.
On Acoust., Speech and Signal Processing, vol. ASSP-34, pp. 898-911, Aug.
1986.
14. http://www.eng.tau.ac.il/~yaro/RecentPublications/index.html
15. T. Szoplik, Selected Papers On Morphological Image Processing: Principles and
Optoelectronic Implementations, SPIE, Bellingham, Wa., 1996 (MS 127).
16. V. Kober, J. Alvarez-Borrego, “Rank-Order Filters With Spatially-Connected
Neighborhoods”, NCIP2001, June 3-6, 2001, Baltimore, MD, USA

16
Table 1. Typical attributes of digital signals
Primary attributes Value ak Co-ordinate k(a)
Secondary attributes Cardinality
H(a)=HIST(NBH,a)
Number of neighborhood elements with the same value as that of element a (defined for quantized signals): (((( )))) (((( ))))∑∑∑∑
∈∈∈∈−−−−====
NBHkkaaaH δδδδ
Rank
Ra=RANK(NBH,a) 1. Number of neighborhood elements with values lower than a
2. Position of value a in variational row (ordered, in ascending values order, sequence of the neighborhood elements)
3. (((( ))))∑∑∑∑====
====a
va vHR
0
COORD(NBH,R )
Co-ordinate of the element with rank R (R -th rank order statistics)
GRDNT(NBH,k ) Signal gradient in position k
Geometrical attributes
CURV(NBH,ar ) Signal curvature in position k Membership in the neighbor-hood
MEMB(NBH,a). A binary attribute that evaluates by 0 and 1 membership of element a in the neighborhood.
Spatial connectedness
CONCTD(NBH,a) A binary attribute that evaluates by 0 and 1 spatial connectedness of element a with other elements of the neighborhood

17
Table 2. Estimation operations OperationDenotation Definition
SMTH: Data smoothing operations
MEAN(NBH) Arithmetic mean of samples of the neighborhood
Arithmetic
operations PROD(NBH) Product of samples of the neighborhood
Value that occupies K-th place (has rank K) in the variational row over the neighborhood. Special cases: MIN(NBH) Minimum over the neighborhood (the first term
of the variational row) MEDN(NBH) Central element (median) of the variational row
K_ROS(NBH)
(K-th rank
order statistics)
MAX(NBH) Maximum over the neighborhood (the last term of the variational row);
MODE(NBH) Value of the neighborhood element with the highest cardinality: (((( ))))(((( ))))
aaHmaxarg
RAND(NBH) A random (pseudo-random) number taken from an ensemble with the same gray level distribution density as that of elements of the neighborhood
SPRD(NBH): Operations that evaluate spread of data within the neighborhood
STDEV(NBH) Standard deviation over the neighborhood
IQDIST(NBH) Interquantil distance (((( )))) (((( ))))NBHNBH L_ROSR_ROS −−−− , where (((( ))))NBHRL SIZE1 ≤≤≤≤<<<<≤≤≤≤ .
RNG(NBH) Range MAX(NBH)-MIN(NBH).
SIZE(NBH) Number of elements of the neighborhood

18
Table 3. Vectorial neighborhood building operations. FUNC(NBH)
Element wise functional transformation of neighborhood elements MULT_Attr(NBH)
Multiplying elements of the neighborhood by some weights MULT_C(NBH) weighting coefficients are defined by element co-
ordinates MULT_V(NBH) weight coefficients are defined by element values MULT_R(NBH) weight coefficients are defined by element ranks
MULT_H(NBH) weight coefficients are defined by the cardinality of the neighborhood elements
MULT_G(NBH) weight coefficients are defined by certain geometrical attributes of the neighborhood elements,
MULT_AA(NBH)
MULT_CR(NBH)
weight coefficients depend on combination of attributes, for instance, on both co-ordinates and ranks of neighborhood elements
REPL_Attr(NBH) Replicating elements of the neighborhood certain number of times according to
certain elements’ attribute SELECT_Attr(NBH)
Attribute controlled selection of one sub-neighborhood from a set: SELECT_A(NBH) = Subnbh
C-neighborhoods: pixel co-ordinates as attributes SHnbh Shape-neighborhoods
Selection of neighborhood elements according to their co-ordinates. In 2-D and multi-dimensional cases: neighborhoods of a certain spatial shape.
V-neighborhoods: pixel values as attributes (((( ))))Vmn;Vpl;a;NBHEVnbh k εεεεεεεε
"epsilon-V"-neighborhood A subset of elements with values {{{{ }}}}na that satisfy inequality: VplaaVmna knk εεεεεεεε ++++≤≤≤≤≤≤≤≤−−−− .
),;( KaNBHKNVnbh k "K nearest by value"-neighborhood of element ka
A subset of K elements with values {{{{ }}}}na closest to that of element ka .
RNGnbh(NBH,Vmn,Vmx)- Range-neighborhood
A subset of elements with values {Vk} within a specified range {Vmn<Vk<Vmx)

19
Table 3. Vectorial neighborhood building operations (cntd). R-neighborhoods:
pixel ranks as attributes (((( ))))Rmn;Rpl;a;NBHERnbh k εεεεεεεε
“epsilon-R”- neighborhood A subset of elements with ranks {{{{ }}}}nR that satisfy inequality:
RplRRRmnR knk εεεεεεεε ++++≤≤≤≤≤≤≤≤−−−− . ),;( KaNBHKNRnbh k -
“K-nearest by rank” neighborhood ofelement ak
A subset of K elements with ranks closestto that of element ka .
(((( ))))rightleft RRNBHQnbh ,, Quantil-neighborhood
Elements (order statistics) whose ranks {{{{ }}}}rR satisfy inequality
(((( ))))WnbhSIZERRR rightrleft <<<<<<<<<<<<<<<<1 H-neighborhoods:
pixel cardinalities as attributes (((( ))))kaNBHCLnbh ; -
"Cluster" neighborhood of element ka . Neighborhood elements that belong to the same cluster of the histogram over the neighborhood as that of element ka .
G-neighborhoods Geometrical attributes
FLAT(NBH) – “Flat”-neighborhood
Neighborhood elements with values of Laplacian (or module of gradient) lower than a certain threshold
LINEAR COMBINATION OF ELEMENTS OF NEIGHBORHOOD T(NBH) Orthogonal transform T of neighborhood elements
DEV(NBH,a) Differences between elements of the neighborhood and certain value a
SELECTION OF SUB-NEIGHBORHOOD FROM A SET OF SUB-NEIGBORHOODS
MIN_Std(SubWnbh1, SubWnbh2, …, SubWnbhn ) MIN_RNG(SubWnbh1, SubWnbh2, …, SubWnbhn )
Neighborhood standard deviation as the attribute Neighborhood range as the attribute

20
Table 4 W-neighborhood (NBH1-based) filters
Signal “smoothing” filters Moving average filter
)Wnbh(ak MEAN====
)Wnbh(_ak ROSK==== Median filter )Wnbh(ak MEDN==== MAX-filters )Wnbh(ak MAX====
"Ranked order" ("percentile") filters
MIN- filters )Wnbh(ak MIN==== Adaptive Mode Quantization filter
)WnbhMODE(ak ====
Signal “enhancement” filters Local histogram equalization
(((( ))))Wnbhak RANK====
Quasi-range filter ======== )Wnbh(ak QSRNG )WnbhL_ROS(-)WnbhR_ROS( Local variance filter
)Wnbh(ak STDEV====
21
Table 5. Two-stage (NBH2 -based) filters classified according to the type of the neighborhood used
FUNC(NBH)
General (((( ))))(((( ))))NBHak FUNCMEAN====
MULT-A- neighborhood filters RMSE optimal linear filters
(((( )))))Wnbh(_ak CMULTMEAN====
L-filters, Rank Selection filters; C-filters (Ll-filters)
(((( )))))Wnbh(_ak RMULTMEAN====
(((( )))))Wnbh(_ak RCMULTMEAN====
REPL-A - neighborhood filters Weighted median filters
))Wnbh(_(ak CREPLMEDN==== ;
Weighted K-ROS - filters
))Wnbh(_(_ak CREPLROSK====
Dilation filter: (((( ))))SHnbhak MAX==== Erosion filter (((( ))))SHnbhak MIN====
Morphological filters
Soft Morph. filters (((( ))))SHnbhak ROS==== V-neighborhoods
K-Nearest Neighbor filter (((( ))))(((( ))))K;a;WnbhKNVa kk MEAN==== "Sigma"- filter (((( ))))(((( ))))Vmn;Vpl;a;WnbhEVnbha kk εεεεεεεεMEAN==== Modified Trimmed Mean filters
(((( ))))(((( ))))(((( ))))Vmn;Vpl;Wnbh;Wnbhak εεεεεεεεMEDNEVMEAN====
R-neighborhoods Alpha-trimmed mean , median
(((( ))))(((( ))))rightleftk R,R,WnbhQnbha MEAN==== ;(((( ))))(((( ))))rightleftk R,R,WnbhQnbha MEDN====
General (((( )))) ++++⋅⋅⋅⋅==== kkrightleftk a)a,R,R,WnbhQnbh(a MEMB (((( ))))[[[[ ]]]]
(((( ))))(((( ))))rightleft
krightleft
R,R,WnbhQnbh)a,R,R,WnbhQnbh(
SMTHMEMB1 ××××−−−−
Impulse noise filtering filters
Rank Conditioned Median filter
(((( )))) ++++⋅⋅⋅⋅==== kkrightleftk a)a,R,R,WnbhQnbh(a MEMB (((( ))))[[[[ ]]]]
(((( ))))(((( ))))rightleft
krightleft
R,R,WnbhQnbh)a,R,R,WnbhQnbh(
MEDNMEMB1 ××××−−−−

22
Table 6. Three stage (NBH3-based) filters “Soft” thresholding
(((( ))));)Wnbh(ak THMEAN ⋅⋅⋅⋅====
(((( ))))[[[[ ]]]]0TTH 222 ,)Wnbh()Wnbh(maxdiag σσσσ−−−−====
Transform domain filters
“Hard” thresholding
{{{{ }}}}(((( )))))Wnbh()Wnbh(ak TTSTEPMEAN ⋅⋅⋅⋅−−−−==== σσσσ , where σσσσ is a filter parameter,
(((( ))))
>>>>≤≤≤≤
====0100
STEPx,x,
x
Local Linear Minimum Mean Square Error filter
(((( ))))(((( )))) (((( ))))(((( )))))Wnbh(
Wnbha
Wnbha kk MEAN
STDSTD1 2
2
2
2 σσσσσσσσ ++++
−−−−==== ,
where 2σσσσ is a filter parameter Double Window Modified Trimmed Mean filter
(((( ))))(((( ))))(((( ))))Vmn;Vpl;SHnbh;WnbhEVnbhak εεεεεεεεMEDNMEAN==== .
Stack filters
====ka (((( )))) (((( )))) (((( ))))(((( ))))nSubWnbh,...,SubWnbh,SubWnbh MINMINMINMAX 21
. Table 7. Four stage (NBH4-based) filters
Polynomial filters
====ka
(((( )))) (((( ))))(((( ))))(((( ))))nSubWnbh,...,SubWnbh PRODPRODMULT_CMEAN 1
Weighted Majority of m Values with Minimum Range -filters, Shorth- filters
(((( )))){{{{ }}}}(((( ))))(((( ))))(((( ))))mik SubRnbha MIN_RNGMULT_RMEAN==== ,
where (((( )))){{{{ }}}}miSubRnbh are rank based sub-neighborhoods of m
elements.

23
Table 8. Cascade filters Multistage Median Filters: cascaded median filters Median Hybrid Filters: cascaded alternating median and linear filters
Closing (((( ))))(((( ))))(((( ))))SHnbhSHbnh MAXMIN Opening (((( ))))(((( ))))(((( ))))SHnbhSHnbh MINMAX Close-opening
(((( ))))(((( ))))(((( ))))(((( ))))(((( ))))(((( ))))(((( ))))SHnbhSHnbhSHnbhSHnbh MAXMINMINMAX
Alternative sequential morphological filters
Open-closing (((( ))))(((( ))))(((( ))))(((( ))))(((( ))))(((( ))))(((( ))))SHnbhSHnbhSHnbhSHnbh MINMAXMAXMINQuasi-spread filter
======== )Wnbh(ak QSPREAD(((( ))))(((( ))))(((( )))) (((( ))))(((( ))))(((( ))))NBHWnbhL_ROS-NBHWnbhR_ROS SMTHSMTH
“Wilcoxon test”-filter
(((( ))))(((( ))))(((( ))))WnbhWnbhak RANKMEAN====
“Tamura’s test”-filter
(((( ))))(((( ))))(((( ))))(((( ))))P
k WnbhWnbha RANKMEAN==== “Median test “filter
(((( )))) (((( ))))(((( ))))(((( ))))(((( ))))2SIZERANKMEAN /WnbhWnbhsignWnbhak −−−−====
Table 9. Two examples of recursive NBH filters Recursive Median filters:
(((( ))))RecWnbhak MEDN====
Recursive Algorithm for filtering impulse noise
(((( )))) (((( )))) (((( ))))[[[[ ]]]] (((( ))))∆∆∆∆−−−−⋅⋅⋅⋅∆∆∆∆++++++++∆∆∆∆⋅⋅⋅⋅==== STEPMEANSTEP 2signRecWnbhaa kk δδδδ
where (((( ))))RecWnbhak MEAN1 −−−−−−−−====∆∆∆∆ δδδδ and 1δδδδ and 2δδδδ are detection and correction thresholds,
(((( ))))
>>>>≤≤≤≤
====0100
STEPx,x,
x

24
T able 10. Size controlled “Sigma”-filter
(((( ))))(((( ))))(((( ))))(((( ))))(((( )))) (((( ))))××××++++
××××−−−−====
SHnbhaEVnbh
ThrVmn;Vpl;a;WnbhEVnbha
k
kk
MEDNMEAN
SIZESTEP εεεεεεεε
(((( ))))(((( ))))(((( ))))Vmn;Vpl;a;WnbhEVnbhThrk
εεεεεεεεSIZESTEP −−−− , where
(((( ))))
>>>>≤≤≤≤
====0100
STEPx,x,
x .
Size_EV –filter (((( ))))(((( ))))Vmmn;Vpl;WnbhEVnbhak εεεεεεεεSIZE==== P- histogram equalization
(((( ))))(((( )))) (((( ))))(((( ))))∑∑∑∑ ∑∑∑∑==== ====
====a
v
a
v
PPk
max
vH/vHa0 0
“Cardnl-filter” )a,Wnbh(a kk HIST====
NBH2-histogram equalization EVnbh-histogram equalization
(((( ))))(((( ))))Vmn;Vpl;a;WnbhEVnbha kk εεεεεεεεRANK====
KNVnbh-histogram equalization
(((( ))))(((( ))))K;a;WnbhKNVa kk RANK====
“SHnbh-histogram equalization
(((( ))))SHnbhak RANK====
Spatially connected (SC-) EV- and R-neighborhood filters
SC-K-Nearest Neighbor filter
(((( ))))(((( ))))(((( ))))kkk a,K;a;WnbhKNVa CONCTDMEAN====
SC-"Sigma"- filter
(((( ))))(((( ))))(((( ))))kkk a,Vmn;Vpl;a;WnbhEVnbha εεεεεεεεCONCTDMEAN====
SC-Modified Trimmed Mean filters
====ka (((( ))))(((( )))) (((( ))))(((( ))))(((( ))))Wnbh,Vmn;Vpl;Wnbh;Wnbh MEDNMEDNEVCONCTDMEAN εεεεεεεε
SC-Alpha-trimmed mean, median
(((( )))) (((( ))))(((( ))))(((( ))))Wnbh,R,R,WnbhQnbha rightleftk MEDNCONCTDMEAN====;
(((( )))) (((( ))))(((( ))))(((( ))))Wnbh,R,R,WnbhQnbha rightleftk MEDNCONCTDMEDN====

25
Fig. 1 Illustrative flow diagram of signal filtering by a nonlinear filter with 2-stage neighborhood building procedure

26
a) Noisy image; noise stdev=20
b) “Sigma” filter, Evpl=Evmn=20, Wnbh=5x5
Itc) Iterative “sigma” filter, Evpl=Evmn=20,
Wnbh=5x5; 5 iterations
d) Iterative SizeEV-contr. “Sigma” filter;
Evpl=Evmn=20, Wnbh=5x5; Thr=5; 5 iterations
e) Noisy image; stdev of additive noise 20; probability of impulse noise 0.15
f) Iterative SizeEV-contr. “Sigma” filter;
Evpl=Evmn=20, Wnbh=5x5; Thr=5; 5 iterations Fig. 2 Comparison of noise suppression capability of “Sigma”- and Size-EV-controlled “Sigma”-filters

27
a) Original image
b) Size-EV-filtered image
c) Cardnl-filtered image
Fig. 3. Size-EV and Cardnl-filtering

28
Initial MRI image
RANK(Wnbh25x25)
RANK(EV(Wnbh25x25;7,7))
Fig. 4. Wnbh and EV-neighborhood local histogram equalization

29
Fig. 5. Schematic diagram of a multilayer parallel network with feedback
feedback

30
Fig. 6. Schematic diagram of a multi-layer network for computing pixel ranks
Layer of look-up-tables
Layer of look-up-tables
Layer of summation units
Layer of summation units
Input layer Output layer

31
Fig. 7. Schematic diagram of a network for forming EV-neighborhood of a pixel with gray level v .
IOutput Layer of look-up-tablesInput layer