redes inteligentes en la protección de los sistemas de
TRANSCRIPT

Redes Inteligentes en la Protección de los
Sistemas de Potencia
Por
Daniel Muñoz Álvarez
Proyecto de Grado
Asesor
Álvaro Torres Macías
Universidad de los Andes
Departamento de Ingeniería Eléctrica y Electrónica
Bogotá, 2009

2
Resumen
Este documento corresponde al informe final del proyecto de grado para optar por el título de Ingeniero Eléctrico en la Universidad de los Andes. Este informe documenta en su totalidad las actividades realizadas por el autor, relacionadas con el proyecto, a lo largo del segundo semestre del 2009. El proyecto muestra la pertinencia de volver inteligente un sistema de protección para una red de transmisión de potencia y realiza el diseño conceptual y un modelo del mismo. Este Sistema de Protección Inteligente (SPI) se basa en un esquema de múltiples agentes inteligentes, una red de comunicaciones de área amplia y una estructura de control jerárquico que permite aumentar la flexibilidad, extensibilidad, confiabilidad y autonomía de los sistemas de transmisión. Se ha determinado que este enfoque de Red Inteligente propuesto es una forma práctica de darle autonomía e integración a un sistema de protección. El trabajo presenta un modelo del SPI utilizando redes de Petri coloreadas (CPN). Este representa modularmente diferentes agentes de los sistemas de protección y de transmisión y la interacción entre ellos, simulando así lo que sería la respuesta del SPI ante las fallas más básicas de un sistema de transmisión, las fallas de línea.

3
REDES INTELIGENTES EN LA PROTECCIÓN DE LOS SISTEMAS
DE POTENCIA
TABLA DE CONTENIDOS
1. INTRODUCCIÓN ............................................................................................................................ 5
2. OBJETIVOS .................................................................................................................................. 7
2.1. OBJETIVO GENERAL ............................................................................................................ 7
2.2. OBJETIVOS ESPECÍFICOS ....................................................................................................... 7
3. DESCRIPCIÓN DE LA PROBLEMÁTICA ................................................................................................ 8
4. MARCO TEÓRICO ......................................................................................................................... 8
4.1. REDES INTELIGENTES (SMART GRIDS) .................................................................................... 9
4.2. SISTEMA DE PROTECCIÓN DE ÁREA AMPLIA (WAPS) ............................................................... 9
4.3. SISTEMA O ESQUEMA DE PROTECCIÓN ESPECIAL (SPS) ............................................................. 9
4.4. FALLAS O EVENTOS EN CASCADA ............................................................................................ 9
4.5. IEC 61850 ..................................................................................................................... 10
4.6. REDES DE PETRI (RP) ........................................................................................................ 10
4.7. REDES DE PETRI COLOREADAS (RPC) ................................................................................... 12
5. MARCO DE REFERENCIA .............................................................................................................. 13
6. DEFINICIÓN Y ESPECIFICACIÓN DE LA SOLUCIÓN .............................................................................. 15
6.1. DEFINICIÓN DEL PROBLEMA ............................................................................................... 15
6.2. ESPECIFICACIONES DE LA SOLUCIÓN ..................................................................................... 16
7. DESARROLLO DEL DISEÑO ............................................................................................................ 18
7.1. PLAN DE TRABAJO ............................................................................................................ 18
7.2. BÚSQUEDA DE INFORMACIÓN ............................................................................................. 19
7.3. ALTERNATIVAS DE DISEÑO ................................................................................................. 19
8. IMPLEMENTACIÓN DEL DISEÑO ..................................................................................................... 20
8.1. DESCRIPCIÓN DE LA SOLUCIÓN ............................................................................................ 20
8.1.1. FUNDAMENTOS DE LA SOLUCIÓN ......................................................................... 20
8.1.2. DESCRIPCIÓN DEL SPI PROPUESTO ....................................................................... 23
8.2. TRABAJO COMPUTACIONAL: MODELO DEL SPI EN REDES DE PETRI COLOREADAS ........................ 29
8.2.1. SUBREDES (AGENTES) ........................................................................................ 31
8.2.2. DESCRIPCIÓN DE LA OPERACIÓN .......................................................................... 41
9. VALIDACIÓN DEL DISEÑO ............................................................................................................. 45

4
9.1. METODOLOGÍA DE PRUEBA ................................................................................................ 45
9.2. VALIDACIÓN DE LOS RESULTADOS DEL DISEÑO ...................................................................... 46
9.2.1. PRIMERA PRUEBA: FALLA EN 50% DE LÍNEA L12 .................................................... 46
9.2.2. SEGUNDA PRUEBA: FALLA EN 5% DE LÍNEA L12 ..................................................... 47
9.2.3. TERCERA PRUEBA: FALLA EN 95% DE LÍNEA L12 .................................................... 48
9.2.4. CUARTA PRUEBA: FALLAS GENERADAS ALEATORIAMENTE ........................................ 48
10. DISCUSIÓN ................................................................................................................................ 50
10.1. SISTEMA DE PROTECCIÓN INTELIGENTE (SPI) ........................................................................ 50
10.2. MODELO DEL SPI ............................................................................................................. 51
11. CONCLUSIONES .......................................................................................................................... 52
12. AGRADECIMIENTOS ..................................................................................................................... 54

Redes Inteligentes en la Protección de los Sistemas de Potencia
5
1. INTRO DUCCIÓN
Las redes eléctricas, especialmente las de grandes escalas y particularmente los sistemas de transmisión están generando una preocupación alrededor del mundo debido a que se están saturando y cada vez, están más cercanos a sus límites técnicos de operación. Esto se debe principalmente al crecimiento de la demanda de energía eléctrica y al estancamiento de la inversión en infraestructura de sistemas de transmisión. Como consecuencia, los sistemas de transmisión son cada vez más complejos y vulnerables, así como menos controlables, seguros y confiables. Una muestra clara de este problema, es la frecuencia con la que han venido ocurriendo apagones de gran escala, los cuales comenzaron en 1965 con el primer gran apagón que afectó alrededor de 25 millones de usuarios de Estados Unidos y Ontario [1][2].
Estos grandes apagones son en su mayoría generados por un evento inicial, que se propaga a través de la red eléctrica generando fallas, aperturas o desconexiones (de líneas, de carga o de generación) que ocasionan, en el peor de los escenarios, la pérdida de estabilidad del sistema seguida de un colapso parcial o total del mismo [1].
Debido al incremento de la ocurrencia de estos apagones, se han venido estudiando y utilizando alrededor del mundo diferentes tipos de sistemas de protección. Estos sistemas de protección tienen diferentes tareas que permiten, disminuir la propagación de estos eventos o perturbaciones y mitigar los efectos de los mismos. Un ejemplo son los denominados Sistemas de Protección Especial o Esquemas de Protección Especial (SPS que viene de Special Protection Systems o Special Protection Schemes) también llamados Planes de Acción Correctiva (RAS que viene de Remedial Action Schemes). Estos sistemas permiten detectar condiciones del sistema que se sabe que pueden generar inestabilidad, sobrecarga o colapsos del voltaje. De igual forma, permiten llevar a cabo acciones predeterminadas para prevenir la propagación de eventos catastróficos que puedan hacer colapsar sistemas eléctricos interconectados [3]. Los sistemas de protección mencionados tienen sus bases en extensos estudios offline1 y en modelos del sistema utilizando escenarios hipotéticos, que precisamente por ser de esta naturaleza, pueden introducir errores o imprecisiones [1][3]. Estos sistemas no ofrecen el dinamismo y la adaptabilidad requerida por los sistemas de potencia, debido al crecimiento acelerado de la demanda de servicios de transmisión [2]. Otra dificultad que introduce este tipo de sistemas de protección, está relacionada con las inestabilidades del sistema, a muchas de las cuales no se puede responder apropiadamente debido a su detección tardía [1].
En la actualidad, los SPS son casi en su totalidad pre-configurados. Esto es debido a que estos sistemas actúan bajo condiciones críticas predeterminadas del sistema. Adicionalmente, los SPS actúan normalmente midiendo únicamente variables locales (con algunas excepciones como los sistemas de protección piloto). Esto hace que estos sistemas y dispositivos de protección se caractericen por operar de forma independiente y sin comunicación con su entorno. Algunos de estos dispositivos tienen la capacidad de comunicarse con un centro de control, pero al parecer este enlace se utiliza sólo para armar o desarmar los dispositivos según las condiciones del sistema [3].
Los sistemas de protección tradicionales no hacen uso de todo el potencial tecnológico que existe en la actualidad, especialmente en el área de las telecomunicaciones. Los sistemas de protección y en general los sistemas de potencia, requieren un cambio drástico y según los
1 Con estudios offline se refiere a estudios realizados sobre modelos teóricos de los sistemas de potencia
y no sobre mediciones reales de los mismos.
Redes Inteligentes en la Protección de los Sistemas de Potencia
6
expertos debe ser la incorporación de inteligencia a los sistemas actuales, en otras palabras volver las Redes Inteligentes. Cada vez es más común el término Smart Grids, el cual tiene un sinnúmero de definiciones. En este trabajo se utilizará para hacer referencia a una red de transmisión con la capacidad de reaccionar ante eventos inesperados, tomando decisiones inteligentes que prevengan la propagación de fallas y mitiguen los efectos de las mismas.
Este proyecto aparece entonces como parte de esta iniciativa de transformar los sistemas de protección tradicionales, en sistemas más inteligentes y adaptivos que serán denominados en este trabajo Sistemas de Protección Inteligentes (SPIs). La idea es desarrollar un sistema de protección basado en dispositivos de protección con cierto grado de autonomía que permitan establecer enlaces de comunicación y procesar información. El sistema de comunicación utilizado debe permitir una comunicación bilateral entre sensores (se encuentran normalmente en dispositivos como relés), actuadores (interruptores) y una serie de agentes de control encargados de tomar decisiones en los diferentes niveles jerárquicos del SPI.
La metodología que se ha seguido para el desarrollo del proyecto comienza por una revisión bibliográfica que abarcó temas relacionados con las Redes Inteligentes y los sistemas de protección. Por medio de esta revisión se seleccionaron referencias relevantes relacionadas con estos temas y con áreas más específicas que eran de interés para el proyecto. Algunas de estas referencias son parte de la justificación de este proyecto [1][2][4][5][6][7][8][9] como parte de la iniciativa desarrollar una Red Inteligente que pueda facilitar el control de los sistemas de potencia. Las demás referencias se seleccionaron como bases y herramientas teóricas que facilitaron el desarrollo del proyecto.
Con base en algunas propuestas y planteamientos realizados en estas referencias, siendo las siguientes las más relevantes [4][10][11][12], se realizó el diseño conceptual de un SPI que puede operar sobre cualquier sistema de transmisión con la condición de que este posea la infraestructura básica que requiere la implementación de una Red Inteligente (i.e. dispositivos con unidades de procesamiento y comunicaciones) [4].
A partir de este diseño conceptual, se desarrolló un modelo del SPI que reúne los siguientes elementos o subsistemas: Un esquema de protecciones, un sistema de comunicaciones y un sistema de control. El SPI se modeló utilizando redes de Petri entre otras cosas, debido a la naturaleza discreta de los eventos que caracterizan un sistema de protecciones y comunicaciones. Además, las redes de Petri han sido utilizadas ampliamente para el modelamiento de sistemas de eventos discretos, entre ellos los sistemas de potencia [11][12] [13][14][15]. Después de estudiar por algún tiempo esta herramienta de modelamiento gráfico y matemático, se determinó que utilizar redes de Petri coloreadas (CPN) podría traer más beneficios debido a la gran flexibilidad y facilidades que estas ofrecen para representar sistemas más complejos. El software que se utiliza para modelar el SPI es CPN Tools© (ver [16] para más detalles), cuya licencia para fines académicos es gratuita.
Finalmente con el modelo desarrollado, se realizan diferentes simulaciones de un sistema de transmisión de 6 buses. Las simulaciones realizadas, consisten en generar fallas de línea en el sistema para observar el modo en que el SPI las despeja. Observando el estado final del modelo es posible identificar los eventos que ocurrieron durante la simulación. Se realiza un análisis de los resultados obtenidos para validar el modelo y evaluar el desempeño del Sistema de Protección Inteligente (SPI).
Redes Inteligentes en la Protección de los Sistemas de Potencia
7
2. OBJE TI VOS
Con base en las nuevas tecnologías y avances en telecomunicaciones y computación, especialmente para el control y supervisión de los sistemas de potencia, nuevos sistemas de protección más inteligentes y autónomos son posibles y se están implementando como parte de las Redes Inteligentes. Estos sistemas de protección inteligentes son más adecuados que los hasta ahora utilizados ya que están más acorde con las necesidades de sistemas de potencia complejos, dinámicos y en constante crecimiento. Estos nuevos sistemas de protección pueden evitar la propagación de eventos en cascada, que de no ser detenidos a tiempo podrían conducir al sistema a un colapso. Función que desempeñan de una manera más confiable, en la medida en que se realiza en tiempo real; controlable, puesto que existe comunicación bilateral entre todos los agentes que componen el sistema; y autónoma, gracias a la capacidad computacional de los diferentes niveles de control.
Lo que este proyecto pretende, es proponer la arquitectura básica de un Sistema de Protección Inteligente (SPI), por medio de la definición de una serie de agentes con diferentes capacidades, objetivos y funciones. Y a partir de esta propuesta conceptual, desarrollar y simular un modelo del SPI utilizando redes de Petri coloreadas. El modelo del SPI que se propone desempeña apenas algunas funciones básicas de las que un sistema de protección debe y puede desempeñar. Sin embargo, la idea es proponer una estructura base o plataforma, sobre la cual se podría implementar cualquier función que se requiera o que se idee en un futuro, a medida que se superen barreras técnicas y tecnológicas que impiden actualmente la implementación de las mismas.
A continuación se presenta el objetivo general resumido y los objetivos específicos del proyecto, los cuales definirán el alcance del mismo.
2.1. Objetivo General
El objetivo general del proyecto es proponer y modelar un Sistema de Protección Inteligente (SPI) basado en un esquema de múltiples agentes, una red de comunicaciones de área amplia y un sistema de control jerárquico que permita de una manera flexible, extensible, confiable y autónoma desempeñar funciones de protección para un sistema de potencia a nivel de transmisión.
2.2. Objetivos Específicos
Los objetivos específicos se presentan para aclarar el alcance del proyecto. Estos son:
Describir la evolución de los sistemas de protección mostrando los sistemas actuales y su evolución hacia las redes inteligentes.
Diferenciar la operación de un SPI con respecto a los sistemas de protección tradicionales.
Describir los sistemas de múltiples agentes y la forma en que estos pueden traer beneficios a un sistema de protección de área amplia.
Explicar la importancia de los sistemas de comunicaciones de área amplia en los sistemas de protección.
Proponer la estructura básica de un SPI y su operación ante fallas en un sistema de transmisión.
Modelar y simular el SPI propuesto y su operación ante fallas de línea en un sistema de transmisión.

Redes Inteligentes en la Protección de los Sistemas de Potencia
8
3. DES CRI PCIÓN DE L A PRO BLEM ÁTI CA
Las perturbaciones de área amplia en los sistemas de potencia son un problema cada vez mayor para las empresas prestadoras de servicios eléctricos de transmisión debido principalmente a las dimensiones y a la gran complejidad que presentan estos sistemas actualmente [6]. Estas perturbaciones son en su mayoría generadas por una serie de eventos que ocurren en cascada, que pueden llevar al sistema a un colapso parcial o total. Estos colapsos son normalmente llamados apagones de área amplia y generan pérdidas millonarias para las industrias y las naciones.
Los sistemas de protección tienen la función de proteger los sistemas de potencia para evitar la propagación de estos eventos en cascada y a su vez, de mitigar los efectos de estos eventos para minimizar las pérdidas de los afectados. El problema se encuentra en que los sistemas de potencia se han vuelto extremadamente complejos debido a la expansión y saturación de los mismos, hasta el punto en que hoy en día debido a la falta de inversión en infraestructura y al crecimiento acelerado de la demanda, se encuentran muy cerca de los límites técnicos de operación. Esto ha vuelto a los sistemas de potencia, grandes y complejas estructuras difíciles de controlar. Por su parte, los sistemas de protección se han quedado un paso atrás si se comparan con estos complejos sistemas de potencia. Esto se hace evidente con el aumento de la frecuencia con la que ocurren apagones de gran escala a nivel mundial [9][16]. Esto muestra la importancia de replantear la filosofía y estructura de los sistemas de protección.
Debido a esto, en los últimos años ha venido creciendo un interés conjunto de todo el sector académico y de la industria eléctrica por las denominadas Smart Grids o Redes Inteligentes como un intento por tomar de nuevo el control de este gran sistema de ingeniería llamado la red eléctrica. Como parte de esta iniciativa nace entonces la idea de desarrollar sistemas de protección más avanzados y acordes con las necesidades de los complejos sistemas de potencia. Este proyecto busca enfrentar esta problemática específica, que es tomar de nuevo el control de los sistemas de potencia, mediante el desarrollo de la estructura de un Sistema de Protección Inteligente que permita desempeñar de manera eficaz funciones de protección para un sistema de transmisión, la columna vertebral de los sistemas de potencia de gran escala.
4. MARCO TEÓ RI CO
En esta sección se presentarán algunas bases teóricas o conceptos necesarios que permitieron al autor desarrollar su trabajo y permitirán al lector comprender el proyecto sin tener que recurrir a otras referencias en lo posible. En algunos casos y si el lector quiere, se sugiere recurrir a referencias especializadas en algunos temas particulares para comprenderlos más a fondo.
Para contextualizar al lector se presentan a continuación definiciones de algunos conceptos importantes dentro del marco de este proyecto. Es decir, las definiciones que se dan a continuación no pretenden abarcar todo lo que estas pueden significar sino únicamente lo que a este proyecto le concierne.
Redes Inteligentes en la Protección de los Sistemas de Potencia
9
4.1. Redes Inteligentes (Smart Grids)2
Redes de transmisión de potencia basadas en agentes inteligentes que cuentan con procesadores independientes que operan bajo sistemas operativos robustos con capacidad de desarrollar sus funciones de manera autónoma y de comunicarse y cooperar con otros agentes, formando una amplia red o plataforma distribuida de computación y control, que minimiza (mas no desplaza) la necesidad de un control centralizado. Para profundizar referirse a [1][2][4][5][8].
4.2. Sistema de Protección de Área Amplia (WAPS)
Es un sistema de protección que reúne información de todo el sistema de potencia utilizando tecnologías de comunicación y de medición de área amplia. Analizando esta información, el sistema puede reconocer perturbaciones que puedan causar graves consecuencias en el sistema de potencia y estima el estado del sistema sometido a las perturbaciones. Basado en esta información, el sistema ejecuta acciones programadas y permanece recolectando información a manera de retroalimentación en el curso de las acciones, para ajustar las acciones posteriores hasta que la perturbación es eliminada o sus consecuencias son mitigadas. Los WAPS pueden tener dos tipos de estructuras: distribuidas o centralizadas. La estructura centralizada se ha venido desarrollando debido a sus grandes capacidades [10]. Para profundizar referirse a [10][17][13].
4.3. Sistema o Esquema de Protección Especial (SPS)
También llamados Planes de Acción Correctiva y Controles Suplementarios Discretos (en inglés Special Protection Systems, Special Protection Schemes, Remedial Action Schemes, Discrete Supplementary Controls o Contingency Arming Schemes). Todos estos son sistemas de protección diseñados para detectar una condición particular del sistema que se sabe que causa un estrés inusual al sistema de potencia. Una vez detectan estas condiciones, toman algún tipo de acción predeterminada para contraatacar la condición observada de una forma controlada. En algunos casos, los SPS son diseñados para detectar condiciones que causan al sistema inestabilidad, sobrecarga o colapso del voltaje [3].
Las acciones de control de estos sistemas de protección se bases normalmente en extensos estudios offline y en modelos de los sistemas utilizando escenarios hipotéticos, que precisamente por ser de esta naturaleza, pueden introducir errores o imprecisiones [1][3]. Otra dificultad que introduce este tipo de sistemas de protección, está relacionada con las inestabilidades del sistema, a muchas de las cuales no se puede responder apropiadamente debido a su detección tardía [1]. Para profundizar en este tipo de sistemas de protección consulte [3][18][19][20].
4.4. Fallas o eventos en cascada
Estos son una secuencia de fallas dependientes de componentes individuales que sucesivamente debilitan el sistema de potencia. Dentro de esta definición, el sistema de potencia no es únicamente una serie de componentes físicos sino también el software, los procedimientos, los operarios y las organizaciones que diseñan, operan y regulan el sistema de potencia. La falla inicial es usualmente considerada un evento aleatorio, sin embargo existe un lazo causal entre los eventos posteriores. La naturaleza de este lazo varía. Este puede ser eléctrico (e.g. cuando la pérdida de un componente genera una sobrecarga en otros componentes), debido a dispositivos de control o protección que actúan apropiada o
2 Adaptado de una definición dada para sistemas de transmisión de energía eléctrica en [4].

Redes Inteligentes en la Protección de los Sistemas de Potencia
10
inapropiadamente o debido a la acción o omisión de operadores humanos (por falta de entrenamiento, falta de herramientas de apoyo, falta de alerta de una situación o por procedimientos inapropiados). Para mayores detalles acerca de este concepto consultar [21] [22].
4.5. IEC 61850
Este es un conjunto de estándares de la International Electrotechnical Commission que define las redes y sistemas de comunicaciones para la automatización de los servicios de potencia y energía eléctrica y especialmente la arquitectura de comunicación de subsistemas como los sistemas de automatización de subestaciones. La suma de todos los subsistemas puede resultar también en la descripción de la arquitectura de comunicación de la gestión global del sistema de potencia [23]. En otras palabras, es el comienzo de la estandarización de los sistemas de potencia para permitirles funcionar como las denominadas Redes Inteligentes en donde las comunicaciones juegan un papel fundamental. Para más detalles consultar [23].
4.6. Redes de Petri (RP)
Las redes de Petri son una herramienta de modelamiento gráfico y matemático aplicable a muchos sistemas. Estas son una herramienta que permite describir y estudiar sistemas de procesamiento de información que se caracterizan por ser concurrentes, asíncronos, distribuidos, paralelos, no determinísticos y/o estocásticos. Como una herramienta gráfica, las redes de Petri pueden ser utilizadas como una ayuda de comunicación visual similar a los diagramas de flujo y los diagramas de bloques, con la excepción que estas tienen una definición matemática precisa. Estas están compuestas por lugares, transiciones, arcos y fichas. Las llamadas fichas o tokens son utilizadas en estas redes para simular las actividades dinámicas y concurrentes de los sistemas, y son a su vez las que definen el estado de la red en cada instante. Como una herramienta matemática, es posible construir ecuaciones de estado, ecuaciones algebraicas y otros modelos matemáticos que rigen el comportamiento de sistemas. Las RP pueden ser utilizadas por prácticos y teóricos. De esta manera, estas proporcionan un medio poderoso de comunicación entre estos: los prácticos pueden aprender de los teóricos quienes hacen sus modelos de una forma metódica, y los teóricos pueden aprender de los prácticos quienes hacen sus modelos más realistas [24]. La Tabla 1 presenta la definición formal de una red de Petri.
Tabla 1. Definición formal de una red de Petri.
Una red de Petri es una estructura matemática totalmente definida por una tupla de 5 elementos 𝑅𝑃 = 𝑃, 𝑇, 𝐹, 𝑊, 𝑀0 , donde:
Definición Matemática Descripción Representación
Gráfica
𝑃 = 𝑝1 , 𝑝2 , ⋯ , 𝑝𝑚 Es un conjunto finito de lugares Círculo
𝑇 = 𝑡1 , 𝑡2 , ⋯ , 𝑡𝑛 Es un conjunto finito de transiciones Rectángulo 𝐹 ⊆ 𝑃 × 𝑇 ∪ 𝑇 × 𝑃 Es un conjunto de arcos (relaciones de flujo) Flecha
𝑊: 𝐹 → 0,1,2,3, ⋯ Es una función de ponderación Número 𝑀0:𝑃 → 0,1,2,3, ⋯ Es el estado o marca inicial -
𝑃 ∩ 𝑇 = ∅ ∧ 𝑃 ∪ 𝑇 ≠ ∅ Es una condición necesaria -
La estructura de una red de Petri 𝑁 = 𝑃, 𝑇, 𝐹, 𝑊 sin un estado inicial específico es denotada con 𝑁.
Una red de Petri con un estado inicial es denotada 𝑁, 𝑀0

Redes Inteligentes en la Protección de los Sistemas de Potencia
11
Un RP es un tipo particular de gráfico dirigido junto con un estado o marca inicial 𝑀0. La estructura 𝑁 de una RP es un gráfico dirigido, ponderado y bipartito que consta de dos tipos de nodos llamados lugares y transiciones, donde los arcos conectan un lugar con una transición o una transición con un lugar. En su representación gráfica, los lugares son dibujados como círculos y las transiciones como rectángulos o cajas. Los arcos se encuentran etiquetados con su peso (o ponderación, que debe ser un entero positivo). Un arco etiquetado con un peso k es equivalente a tener k arcos paralelos. Las etiquetas de pesos unitarios son omitidas. Una marca o estado asigna a cada lugar un número entero no negativo 𝑝 que indica el número de fichas o tokens que tiene. En la representación por modelos, los lugares representan condiciones y las transiciones representan eventos. Una transición (evento) tiene cierto número de lugares de entrada y salida que representan las pre-condiciones y pos-condiciones del evento. La presencia de una ficha en un lugar se interpreta como el cumplimiento de la condición asociada con el lugar. Otra forma de interpretar k fichas en un lugar es la existencia o disponibilidad de k elementos o recursos en el lugar.
La regla que determina el comportamiento de una red de Petri es la denominada regla de transición o disparo:
Se dice que una transición está habilitada si cada lugar de entrada 𝑝 de 𝑡 está marcado con por lo menos 𝑊 𝑝, 𝑡 fichas, donde 𝑊 𝑝, 𝑡 es el peso o ponderación del arco de 𝑝 a 𝑡.
Una transición habilitada puede o no ser disparada dependiendo de si ocurre o no el evento asociado a la transición.
El disparo de una transición habilitada 𝑡 remueve 𝑊 𝑝, 𝑡 fichas de cada lugar de entrada 𝑝 de 𝑡, y suma 𝑊 𝑡, 𝑝 fichas a cada lugar de salida 𝑝 de 𝑡, donde 𝑊 𝑡, 𝑝 es el peso o ponderación del arco de 𝑡 a 𝑝.
Figura 1. Modelo simplificado de un protocolo de comunicación.

Redes Inteligentes en la Protección de los Sistemas de Potencia
12
La Figura 1 presenta una RP sencilla que sirve como ilustración de lo descrito anteriormente. En [24] se da una descripción completa de esta herramienta gráfica y matemática junto con algunos ejemplos aplicados.
A continuación se presenta la definición de las redes de Petri coloreadas que son un tipo más complejo de redes de Petri. Este tipo de redes son las utilizadas en este proyecto para modelar el SPI que se propone.
4.7. Redes de Petri Coloreadas (RPC)3
Estas son un tipo de redes de Petri de alto nivel. El paso de las redes de Petri tradicionales o de bajo nivel a las de alto nivel se puede comparar con el paso de lenguajes de ensamble a lenguajes de programación de alto nivel. En las redes de bajo nivel existe sólo un tipo de fichas, lo que significa que el estado de un lugar se puede describir con un entero. En las redes de alto nivel, cada ficha puede contener información o datos complejos de diferentes tipos (e.g. números enteros, variables binarias o cadenas de caracteres).
Las ventajas de las redes de Petri de alto nivel (donde las RPC sólo son un ejemplo) se hacen evidentes a la hora de modelar sistemas reales medianamente complejos. Estos sistemas suelen contener partes similares pero no idénticas, y utilizando redes de Petri de bajo nivel es necesario representarlas con diferentes subredes con estructuras casi idénticas. Esto hace que los modelos se vuelvan extremadamente grandes y difíciles de leer.
El uso práctico de redes de Petri de bajo nivel ha demostrado claramente la necesidad de un tipo de redes con mayor capacidad de representación, de manera tal que se puedan describir sistemas complejos de formas manejables y prácticas. Estas redes de alto nivel pueden entonces describir un sistema complejo de una forma más compacta y legible que lo que lo harían las redes de bajo nivel. Esto se logra adjuntándole a cada ficha un dato o valor y se le denomina una ficha coloreada. El valor asociado a cada ficha puede tener una complejidad arbitraria (e.g., puede tener un real en su primer campo, una cadena de caracteres en su segundo campo y una lista de enteros en un tercer campo). Los lugares tienen entonces un conjunto de colores determinado y sólo pueden estar en él las fichas cuyos colores pertenezcan a este conjunto.
El uso de conjuntos de colores en las RPC es completamente análogo al uso de diferentes tipos de variables en los lenguajes de programación. Los conjuntos de colores determinan los posibles valores que las fichas pueden tomar (análogamente a la forma en que los tipos de variables determinan los posibles valores de las variables y expresiones).
Otra diferencia importante con las redes de Petri de bajo nivel, es que en las redes de alto nivel se introducen otro tipo de elementos que se hacen necesarios para definir por completo una RPC. Además de la estructura de la red (i.e. los lugares, las transiciones y los arcos), aparecen las declaraciones y las inscripciones de la red. Las declaraciones sirven para definir los conjuntos de colores, las variables a utilizar e incluso hasta funciones (de la misma forma que se declara en un lenguaje de programación). Y las inscripciones acompañan a los lugares, a los arcos y a las transiciones y contienen información que describe la configuración de cada elemento. Los lugares tienen cuatro tipos de inscripciones: el nombre, el conjunto de colores, su marca inicial y su marca actual. Las transiciones tienen dos tipos de inscripciones: el nombre y la guardia. Finalmente los arcos sólo tienen un tipo de inscripción que indica su expresión. Cada elemento tiene sus inscripciones junto a él para poder distinguirlas.
3 Esta definición se adaptó de [16][24].

Redes Inteligentes en la Protección de los Sistemas de Potencia
13
Debido a la complejidad de las RPC es favorable utilizar un tipo de lenguaje de programación ya definido. En este trabajo se utilizará un lenguaje llamado CPN ML, el cual es utilizado por el software CPN Tools© para estandarizar la forma en que se deben realizar todas descripciones, declaraciones y expresiones. Utilizar un lenguaje de esta índole le permite al modelador utilizar una serie de funciones predefinidas (que no son ni muchas ni muy complejas en comparación con las disponibles en otros lenguajes de programación, como por ejemplo C++).
Entre las ventajas de utilizar RPC en reemplazo de RP están:
La descripción y análisis se vuelve más compacta y manejable (debido a que la complexidad se divide entre la estructura de la red, las declaraciones y las inscripciones).
Hacen posible describir manipulaciones simples de datos de una manera más directa (utilizando las expresiones de los arcos en reemplazo de conjuntos complejos de lugares, transiciones y arcos).
Se hace más fácil identificar similitudes y diferencias entre partes similares de los sistemas (debido a que son representadas por la misma subred).
La descripción es más redundante lo que significa menos errores (debido a que errores pueden encontrarse identificando inconsistencias).
Algunos tipos de errores se hacen imposibles o al menos poco probables (e.g. al modificar una subred se modifican todos los procesos representados por esta y no hay posibilidad de dejarlo de hacer para algún proceso).
Existe una extensa bibliografía acerca de este tipo de específico de redes de Petri de alto nivel. Se recomienda consultar [24][25][26] para profundizar en los conceptos básicos tanto de RP como de RPC debido al enfoque particular que se le da en estas referencias. Algunos ejemplos de aplicaciones específicas de esta herramienta gráfica y matemática de modelamiento relacionados con este trabajo se presentan en [11][12][13][14][15].
5. MARCO DE REFE REN CI A
En esta sección se describirán las referencias más relevantes para este proyecto, en la medida en que realizan aportes importantes relacionados con los objetivos de este trabajo. Se presenta un resumen de cada referencia y los aportes que realiza a este proyecto.
Toward a smart grid: power delivery for the 21st century [4]
Este artículo fue publicado en la IEEE Power and Energy Magazine en septiembre de 2005. Este presenta la seguridad, agilidad y robustez/supervivencia de la infraestructura de un sistema de potencia de gran escala que se enfrenta a nuevas amenazas y a condiciones inesperadas. Menciona algunos factores importantes para darle inteligencia a un sistema de transmisión de energía eléctrica. Dentro de esto realiza una comparación entre los sistemas de protección, las redes inteligentes y los sistemas SCADA/EMS. Habla de la necesidad de añadir inteligencia a los sistemas de potencia introduciendo unidades de procesamiento en los diferentes componentes de las subestaciones y de las plantas de generación, de tal forma que puedan actuar como agentes independientes que puedan comunicarse y cooperar con los demás agentes, formando una gran plataforma de computación distribuida. Se menciona que para esto es necesario tener una red de comunicaciones paralela a la red eléctrica que permite mantener una comunicación permanente entre los agentes del sistema. Esta característica junto con la computación distribuida es la esencia de una red inteligente. Esta idea de realizar

Redes Inteligentes en la Protección de los Sistemas de Potencia
14
una red de comunicaciones paralela a la red eléctrica se tomó para realizar el diseño del SPI propuesto por este trabajo.
Modeling of a transmission line protection relaying scheme using Petri nets [11]
Este artículo fue publicado en la IEEE Transactions on Power Delivery en julio de 1997. Este propone un modelo para un esquema de protección de una línea de transmisión utilizando redes de Petri (RP). El modelo incluye tres tipos de relés y un dispositivo de recierre automático. Posteriormente se analizan las propiedades del modelo RP para evaluar el comportamiento dinámico del sistema modelado. Se menciona que este modelo puede ser extendido hacia sistemas similares para evaluar sus desempeños. Este artículo, aunque es de hace ya bastantes años, se utilizó para comenzar a desarrollar el modelo propuesto por este trabajo. El modelo presentado por el presente trabajo es bastante más complicado que el presentado en el artículo, sin embargo este último fue fundamental para el desarrollo inicial de un modelo básico de un sistema de protección de líneas de transmisón.
Modeling of a transmission network protection system using Petri nets [12]
Este artículo es la continuación del inmediatamente anterior [11] y fue publicado en la revista Electric Power Systems Research en marzo de 1998. En este se propone todo un sistema de protección de una red de transmisión y se utilizan esta vez redes de Petri coloreadas (RPC). El sistema de protección está compuesto por tres partes: un modelo para la subred de un bus, un modelo para el esquema de protección de la línea de transmisión y un modelo para el enlace de comunicación. Se da un ejemplo que describe la operación de los modelos y la relación entre los mismos. De la misma forma que el artículo anterior, este se utiliza en este trabajo como una base fundamental para desarrollar el modelo del SPI. En el modelo realizado se utilizan varias ideas aportadas por este modelo compuesto por subredes o módulos interconectados.
A novel communication network for three-level wide area protection system [10]
Este artículo fue presentado en la IEEE Power and Energy Society General Meeting: Conversion and Delivery of Electrical Energy in the 21st Century en julio de 2008. Este describe los WAPS como sistemas de protección contra perturbaciones de área amplia que se basan en tecnologías de medición y comunicación. Propone que una estructura de tres niveles de jerarquía es buena para los WAPS, pero menciona que esta requiere de un sistema de comunicaciones de alto desempeño. El objetivo de este artículo es diseñar una red de comunicaciones adecuada para un WAPS de tres niveles de jerarquía. Se propone clasificar los mensajes según su importancia y se determina la demanda de estos mensajes al sistema de comunicación. En este artículo se mencionan diferentes topologías o configuraciones posibles de la red de comunicaciones en los diferentes niveles de jerarquía de la misma. La red diseñada en este artículo hace uso del estandar IEC 61850 para redes de área local. De este artículo se toma la idea de realizar una red o sistema de comunicaciones con tres niveles de jerarquía y analógicamente se definen tres niveles de control jerárquico que permiten realizar el control del sistema de protección de una forma distribuida con una coordinación centralizada.
Multi-Agent Systems for Power Engineering Applications—Part I: Concepts, Approaches, and Technical Challenges [27]
Este artículo fue publicado en la IEEE Transactions on Power Systems en noviembre de 2007. Este examina el potencial de los Sistemas Multi Agentes (MAS) en la industria eléctrica. Se describen conceptos fundamentales y enfoques del campo de los MAS que son apropiados

Redes Inteligentes en la Protección de los Sistemas de Potencia
15
para las aplicaciones de sistemas de potencia. Se definen cuestiones tecnicas que deben ser abordadas para acelerar y facilitar la incorporación de esta tecnología en el sector de la electricidad y la energía. De este artículo se toman algunos conceptos importantes sobre la tecnología MAS, así como la idea de utilizarla en los sistemas de potencia.
Las referencias no mencionadas en esta sección también realizaron aportes importantes a este trabajo. Estos aportes son igualmente valiosos debido a que le dan un soporte a este trabajo. Estos aportes son reconocidos a lo largo del trabajo mediante su citación.
6. DEFINI CIÓN Y ES PE CIF ICACI ÓN DE L A SOL UCI ÓN
En esta sección se presenta la definición concreta del problema a solucionar con todas las consideraciones que este implica. A partir de esta problemática se definen una serie de especificaciones con las que debe cumplir la solución con base en las cuales se desarrolla en la siguiente sección el diseño de la misma.
6.1. Definición del Problema
El problema a solucionar aparece como parte de la iniciativa propuesta por las Redes Inteligentes para retomar el control total de los sistemas de potencia. Debido a la complejidad de los sistemas de potencia, este trabajo aborda un problema específico y son los sistemas de transmisión de potencia. Estos no son un problema como tal, sino más bien una solución a una necesidad de transporte de electricidad. Sin embargo, estos sistemas con el crecimiento de los mismos se han vuelto extremadamente complejos y extensos. En la actualidad y debido al auge de las Redes Inteligentes han surgido muchas ideas acerca de cómo debe ser un sistema de protección a nivel de transmisión (en [4][6][8][23][11][12][13] se sugieren características o estructuras que deben tener los sistemas de protección a nivel de transmisión), sin embargo ninguna propone un sistema completo de protección que pueda ser fácilmente implementado debido a la generalidad con la que se aborda el problema o a que sólo se encargan de darle solución a alguno de los muchos retos tecnológicos impuestos por el problema.
El problema es entonces una necesidad de definir en detalle la arquitectura y operación general de un SPI que pueda funcionar para cualquier sistema de transmisión. Debido a la complejidad de los sistemas de potencia y de los sistemas de protección, en este trabajo se presenta la arquitectura básica del SPI y se describe la forma en que los diferentes agentes del sistema intercambian información para poder ejecutar sus funciones. Esta estructura básica requiere una definición de los agentes que componen el sistema y la especificación de las funciones que estos debe desempeñar. En otras palabras, este trabajo propone una plataforma sobre la cual se podrán implementar las funciones normales de un sistema de protección para que sean ejecutadas de una manera automatizada, inteligente y eficaz. Para mostrar la forma en que se pueden implementar estas funciones, se desarrolla una de las funciones fundamentales de los sistemas de transmisión, la que es la ejecutada por los relés de distancia. Estos relés protegen las líneas de transmisión abriéndolas cuando alguna falla es detectada en las mismas.
Para resumir, el problema a resolver es la falta de flexibilidad, extensibilidad, confiabilidad y autonomía en los sistemas de protección actuales, que no son lo suficientemente eficaces e inteligentes para los sistemas de potencia que se tienen hoy en día. Además, estos no están preparados para soportar el crecimiento acelerado de la demanda de energía eléctrica y la complejidad en aumento de estos sistemas interconectados. Para esto se propone el diseño y modelación de una plataforma sobre la cual se puedan implementar funciones de protección

Redes Inteligentes en la Protección de los Sistemas de Potencia
16
para un sistema de transmisión, la cual utilizando todas las herramientas que le brinda esta Red Inteligente, ejecutará las funciones de una manera más eficaz. Esta plataforma se denominará Sistema de Protección Inteligente (SPI).
6.2. Especificaciones de la Solución
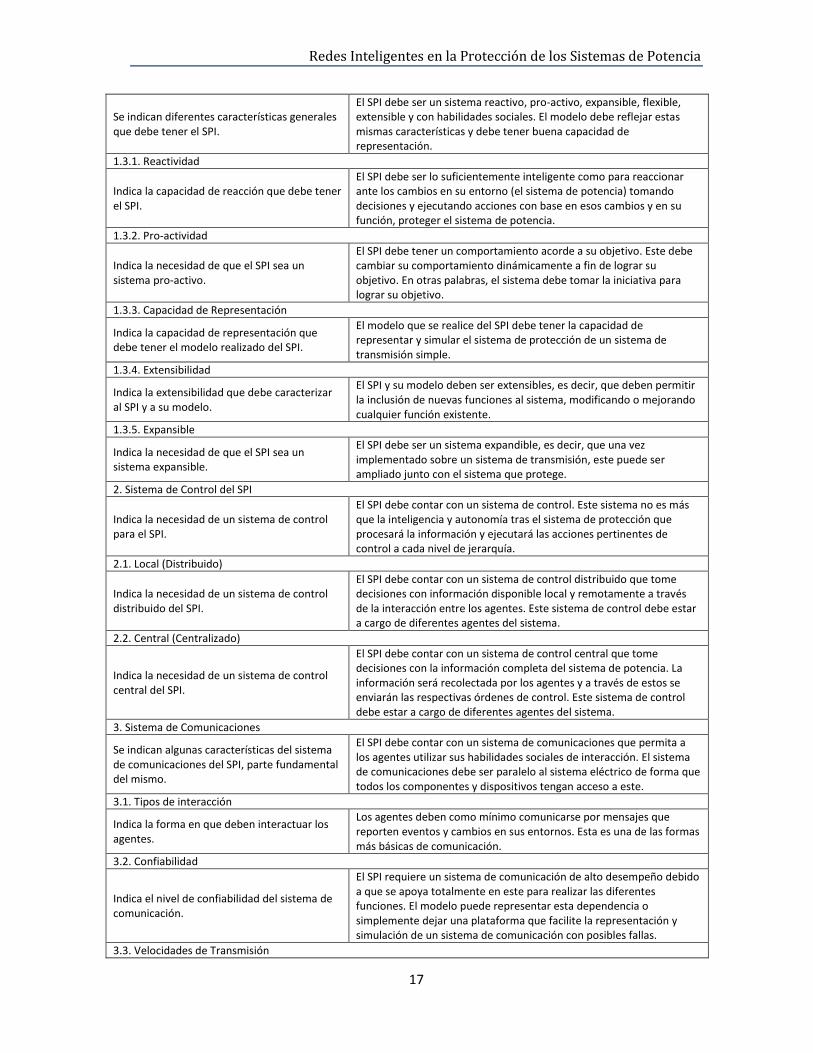
En esta sección se presentan todas las especificaciones que debe satisfacer la solución a la problemática descrita en la sección anterior. Las especificaciones que se mencionan a continuación son las que se creen necesarias para hacer que un SPI satisfaga las características básicas que debe poseer una Red Inteligente. En la Tabla 2 se listan las especificaciones que debe cumplir la solución que propone este trabajo y se realiza una descripción de las mismas. Estas especificaciones permiten obtener como solución una plataforma para la construcción de un sistema robusto, flexible y extensible, características de un sistema de múltiples agentes [27].
Tabla 2. Especificaciones de la solución.
ESPECIFICACIÓN DESCRIPCIÓN
1. Sistema de Protección Inteligente (SPI)
Se indican las diferentes características que debe tener el SPI para desempeñar sus funciones.
El SPI debe estar basado en un sistema de múltiples agentes, en un control por jerarquías y en un sistema de comunicaciones que cumpla las siguientes especificaciones:
1.1. Sistema de Múltiples Agentes
Indica el tipo de estructura que debe tener el sistema a desarrollar.
La estructura del SPI debe estar basada en múltiples agentes. Siendo un agente una entidad software o hardware situada en un entorno con capacidad de reaccionar a cambios en este [27]. Este sistema debe cumplir con las siguientes características:
1.1.1. Reconocimiento
Indica el reconocimiento en el sistema de cada uno de los agentes.
Cada agente puede ser de un único tipo y se le reconoce dentro del sistema como tal. Un agente no puede cambiar su tipo.
1.1.2. Reactividad
Indica la capacidad de reaccionar que deben tener los agentes.
Cada agente debe tener la habilidad de reaccionar a cambios en su entorno en un tiempo oportuno, y realiza acciones basado en esos cambios y en la función para la que fue diseñado.
1.1.3. Habilidad Social
Indica las habilidades sociales (o de comunicación) que deben tener los agentes.
Cada agente debe tener la habilidad de interactuar con otros agentes. Esta habilidad debe ser como mínimo el intercambio de información entre agentes.
1.2. Niveles de Jerarquía
Indica los niveles de jerarquía que debe tener el SPI para tener una arquitectura que facilite el control jerárquico.
El sistema debe tener como mínimo los siguientes tres niveles de jerarquía:
1.2.1. Nivel de protección de campo
Indica la necesidad y características de un nivel de control de campo.
Debe existir un nivel de jerarquía que abarque o controle los dispositivos de campo, es decir, los de más bajo nivel que interactúan directamente con el sistema de potencia (i.e. sensores y actuadores).
1.2.2. Nivel de protección local
Indica la necesidad y características de un nivel de control local.
Debe existir un nivel de jerarquía que abarque todos los agentes del nivel de protección de campo ubicados dentro de un área geográfica limitada (i.e. Subestaciones del sistema de transmisión).
1.2.3. Nivel de protección central
Indica la necesidad y características de un nivel de control central.
Debe existir un nivel de jerarquía que abarque todos los agentes del nivel de protección local del SPI y por ende que esté sobre todos los agentes.
1.3. Características del Sistema
Redes Inteligentes en la Protección de los Sistemas de Potencia
17
Se indican diferentes características generales que debe tener el SPI.
El SPI debe ser un sistema reactivo, pro-activo, expansible, flexible, extensible y con habilidades sociales. El modelo debe reflejar estas mismas características y debe tener buena capacidad de representación.
1.3.1. Reactividad
Indica la capacidad de reacción que debe tener el SPI.
El SPI debe ser lo suficientemente inteligente como para reaccionar ante los cambios en su entorno (el sistema de potencia) tomando decisiones y ejecutando acciones con base en esos cambios y en su función, proteger el sistema de potencia.
1.3.2. Pro-actividad
Indica la necesidad de que el SPI sea un sistema pro-activo.
El SPI debe tener un comportamiento acorde a su objetivo. Este debe cambiar su comportamiento dinámicamente a fin de lograr su objetivo. En otras palabras, el sistema debe tomar la iniciativa para lograr su objetivo.
1.3.3. Capacidad de Representación
Indica la capacidad de representación que debe tener el modelo realizado del SPI.
El modelo que se realice del SPI debe tener la capacidad de representar y simular el sistema de protección de un sistema de transmisión simple.
1.3.4. Extensibilidad
Indica la extensibilidad que debe caracterizar al SPI y a su modelo.
El SPI y su modelo deben ser extensibles, es decir, que deben permitir la inclusión de nuevas funciones al sistema, modificando o mejorando cualquier función existente.
1.3.5. Expansible
Indica la necesidad de que el SPI sea un sistema expansible.
El SPI debe ser un sistema expandible, es decir, que una vez implementado sobre un sistema de transmisión, este puede ser ampliado junto con el sistema que protege.
2. Sistema de Control del SPI
Indica la necesidad de un sistema de control para el SPI.
El SPI debe contar con un sistema de control. Este sistema no es más que la inteligencia y autonomía tras el sistema de protección que procesará la información y ejecutará las acciones pertinentes de control a cada nivel de jerarquía.
2.1. Local (Distribuido)
Indica la necesidad de un sistema de control distribuido del SPI.
El SPI debe contar con un sistema de control distribuido que tome decisiones con información disponible local y remotamente a través de la interacción entre los agentes. Este sistema de control debe estar a cargo de diferentes agentes del sistema.
2.2. Central (Centralizado)
Indica la necesidad de un sistema de control central del SPI.
El SPI debe contar con un sistema de control central que tome decisiones con la información completa del sistema de potencia. La información será recolectada por los agentes y a través de estos se enviarán las respectivas órdenes de control. Este sistema de control debe estar a cargo de diferentes agentes del sistema.
3. Sistema de Comunicaciones
Se indican algunas características del sistema de comunicaciones del SPI, parte fundamental del mismo.
El SPI debe contar con un sistema de comunicaciones que permita a los agentes utilizar sus habilidades sociales de interacción. El sistema de comunicaciones debe ser paralelo al sistema eléctrico de forma que todos los componentes y dispositivos tengan acceso a este.
3.1. Tipos de interacción
Indica la forma en que deben interactuar los agentes.
Los agentes deben como mínimo comunicarse por mensajes que reporten eventos y cambios en sus entornos. Esta es una de las formas más básicas de comunicación.
3.2. Confiabilidad
Indica el nivel de confiabilidad del sistema de comunicación.
El SPI requiere un sistema de comunicación de alto desempeño debido a que se apoya totalmente en este para realizar las diferentes funciones. El modelo puede representar esta dependencia o simplemente dejar una plataforma que facilite la representación y simulación de un sistema de comunicación con posibles fallas.
3.3. Velocidades de Transmisión

Redes Inteligentes en la Protección de los Sistemas de Potencia
18
Indica los requerimientos de velocidades de transmisión del sistema de comunicaciones.
Para este trabajo la velocidad de transmisión del sistema de comunicaciones no será un requerimiento explícito. Las velocidades podrán ser asumidas como infinitas (mensajes instantáneos).
4. Funciones del SPI
Se indican las funciones que deberán ser implementadas inicialmente en la plataforma del SPI como muestra para otras funciones que pueden ser implementadas en un sistema de protección.
El SPI puede desempeñar muchas funciones de protección del sistema de transmisión, sin embargo a manera de ilustración sólo será necesaria la implementación de una función sobre la plataforma desarrollada: la protección contra fallas de línea.
4.1. Protección contra Fallas de Línea
Se indican las características básicas que debe tener la función de protección contra fallas de línea.
El sistema de protección contra fallas de línea debe tener dos características principales: debe contar con una protección primaria y además con una protección de respaldo que le dé al sistema una tolerancia a fallas de componentes y por consiguiente mayor confiabilidad y seguridad.
4.1.1. Protección Primaria
Indica la necesidad de una protección primaria contra fallas de línea.
Esta función debe proteger las líneas de transmisión sacándolas de servicio en el momento en que una falla ocurra en estas.
4.1.2. Protección de Respaldo
Indica la necesidad de una protección de respaldo contra fallas de línea.
Esta función debe otorgar una protección secundaria o de respaldo a las líneas de transmisión, de tal forma que si no pueden ser abiertas en sus extremos por cualquier razón, se busque la forma de aislar la falla de línea para evitar daños al sistema y propagaciones de la falla en cascada.
7. DES ARROLLO DEL DIS EÑO
En esta sección se presenta una descripción del trabajo realizado a partir de las especificaciones mencionadas en la sección anterior. Se presenta un plan de trabajo detallado en donde se menciona cada una de las actividades, una descripción de la búsqueda de información realizada para el proyecto y finalmente se mencionan algunas alternativas de diseño que se consideraron a lo largo del proyecto y la justificación de haber seleccionado la solución presentada por este trabajo.
7.1. Plan de Trabajo
En el plan de trabajo se incluyen cada una de las actividades realizadas a lo largo del desarrollo del proyecto, desde la revisión bibliográfica hasta la validación de las especificaciones en la solución implementada. En la Tabla 3 se presenta el plan de trabajo.
Tabla 3. Plan de trabajo
1. Propuesta formal del proyecto Fecha/Duración 21/05/2009
Esta actividad consiste en la preparación de la propuesta del proyecto, la cual debe ser entregada en el formato propuesto por el departamento.
2. Inicio de actividades académicas (Periodo 2009-2) Fecha/Duración 03/08/2009
Fecha en la cual se iniciaron las actividades académicas del periodo en el cual fue desarrollado el proyecto.
3. Revisión bibliográfica Fecha/Duración Semana 1-8
Esta actividad fue básicamente una selección de fuentes de información, con base en las cuales se realizó el planteamiento teórico y práctico de la solución propuesta. Inicialmente esto se realizó con la ayuda del asesor y esta revisión se prolongó por parte del autor incluso hasta las últimas etapas del proyecto en donde eran necesarias referencias que brindaran soporte teórico para algunos temas específicos, sin embargo se dio por terminada prácticamente en la octava semana. La información fue obtenida básicamente de artículos de bases de datos (IEEE y Science Direct), algunos libros comerciales e información más informal proporcionada por el asesor del proyecto.
4. Familiarización con redes de Petri
4.1. Redes de Petri Fecha/Duración Semana 5
Estudio de las redes de Petri y sus aplicaciones de modelación de sistemas reales. Uso de diferentes programas
Redes Inteligentes en la Protección de los Sistemas de Potencia
19
software de simulación de redes de Petri.
4.2. Redes de Petri Coloreadas Fecha/Duración Semana 6
Estudio de las redes de Petri coloreadas y sus aplicaciones de modelación de sistemas reales complejos como los sistemas de potencia. Uso del programa CPN Tools© para montaje y simulación de redes de Petri de alto nivel.
5. Diseño conceptual del SPI Fecha/Duración Semana 7-8
Durante esta etapa se realizó el diseño conceptual del Sistema de Protección Inteligente basándose en las especificaciones dadas.
6. Modelo del SPI Fecha/Duración Semana 9-11
Se desarrollaron los diferentes agentes del modelo en redes de Petri coloreadas siguiendo las especificaciones requeridas.
7. Informe de avance de proyecto Fecha/Duración Semana 10
Se realiza la entrega del artículo de avance de proyecto.
8. Integración de agentes del modelo Fecha/Duración Semana 12
Se realizó una integración de todos los agentes definidos y modelados para conformar y consolidar un modelo completo e integrado del SPI.
9. Simulación y Validación del Modelo Fecha/Duración Semana 12-13
Se simuló el modelo del SPI a partir de las últimas fases de desarrollo del mismo para realimentar el diseño y definir los últimos detalles. Finalmente se realizaron pruebas y simulaciones para validar el modelo.
10. Documento Final y Artículo Fecha/Duración Semana 14-19
Se realizó una recopilación de todo el trabajo desarrollado en el semestre y se presenta el reporte o documento final del proyecto. Este documento se realiza según la guía propuesta por el Departamento de Ingeniería Eléctrica y Electrónica para proyectos finales y cursos taller según las normas ABET. Se realiza además el artículo resumen del proyecto en el cual se plasman los objetivos, el desarrollo y las conclusiones del proyecto.
11. Entrega y sustentación del proyecto Fecha/Duración 13/01/2010
Entrega final de todo el proyecto y sustentación del mismo ante el asesor y los jurados.
7.2. Búsqueda de Información
La búsqueda de información se realizó de diversas formas. Inicialmente el proyecto no estaba completamente definido y con la ayuda del asesor y algunos artículos recomendados por él, el proyecto adquirió un objetivo claro. Más adelante, se realizó una revisión bibliográfica principalmente en dos bases de datos (IEEE Xplore y Science Direct) lo que dio como resultado artículos científicos y proyectos relacionados con los temas de interés.
Más adelante y durante todo el proceso de diseño se buscaron más fuentes de información a medida que se encontraban diferentes problemas para el planteamiento de la solución. Se seleccionaron otros artículos y documentos teóricos que soportaban temas específicos necesarios en el diseño o en el presente documento. Las referencias de trabajos similares al realizado en este proyecto se describen más detalladamente en la sección 5 del presente documento.
7.3. Alternativas de Diseño
En cuanto a alternativas de diseño, son sólo algunos los detalles que son relevantes mencionar. Las alternativas de diseño no desarrolladas en este proyecto se pueden asumir como trabajo futuro que puede complementar la presente propuesta. Estas alternativas no se desarrollaron por limitaciones de tiempo del proyecto.
Estas alternativas fueron apareciendo a medida que se desarrollaba el modelo del SPI. Debido a que aún no se ha descrito la solución como tal, es posible que no se comprendan las soluciones alternativas, sin embargo se aclararán más adelante en este documento. Estas alternativas no son mutuamente excluyentes con la solución escogida a realizar. Estas son complementos que harían del modelo presentado en este documento, un modelo más completo, elaborado y real de un Sistema de Protección Inteligente.

Redes Inteligentes en la Protección de los Sistemas de Potencia
20
Se mencionó en las especificaciones que el objetivo del modelo es desarrollar una plataforma de operación para el SPI, sobre la cual se puedan implementar diferentes funciones que desempeña normalmente un sistema de protección de un sistema de transmisión. Una de las alternativas fue no desarrolladas fue implementar la función de protección contra fallas de buses en conjunto con la de fallas de líneas. Esto sin embargo no pudo ser realizado por limitaciones de tiempo, ya que esto representaba más complejidad para el modelo.
Otra alternativa o complemento bastante deseado, es la posibilidad de representar circuitos dobles o líneas paralelas entre nodos. Sin embargo, por las mismas razones no se alcanzó a desarrollar esta posibilidad, lo que le quita un poco de capacidad de representación al modelo, pues esta es una práctica muy común en los sistemas de transmisión.
Otra posible alternativa que se identificó, fue la implementación de cualquier función de protección (por ejemplo las desempeñadas por todos los tipos de relés de protección que existen hoy en día) sobre la plataforma desarrollada. Es por esto que la plataforma y el modelo desarrollado facilitan la implementación de este tipo de funciones, pues está basado en la interacción de agentes que cumplen diferentes funciones.
Según esto, el tiempo fue el único factor limitante para desarrollar un modelo más complejo y real del SPI, lo que hace interesante continuar con el desarrollo de este proyecto. Con un poco más de tiempo se podría elaborar un modelo mucho más completo de un Sistema de Protección Inteligente, con el que se podría simular su operación sobre un sistema real de transmisión y no sobre un sistema de prueba como el utilizado en este proyecto.
8. IM PLEMEN TACIÓN DEL DISEÑO
En esta sección se presenta la totalidad de la solución desarrollada por el autor. Se incluye una descripción detallada de toda la solución. Se presenta una descripción conceptual del Sistema de Protección Inteligente, el cual es la principal propuesta de este proyecto. Se presenta también el modelo desarrollado del SPI en redes de Petri coloreadas y la función de protección contra fallas de línea implementada sobre el modelo del SPI. En la siguiente sección de validación del diseño se presentará la descripción de las simulaciones realizadas y los resultados de las mismas.
8.1. Descripción de la Solución
8.1.1. Fundamentos de la Solución
La solución propuesta por este proyecto tiene tres bases fundamentales, las cuales le dan soporte al mismo. Estos tres pilares se obtuvieron principalmente de [4][10][27] y la idea de este proyecto es reunir de manera coherente estas ideas o conceptos en un único Sistema de Protección Inteligente. A continuación se presentan estos pilares fundamentales.
8.1.1.1. Sistema basado en agentes independientes4
Los MAS (Multi-Agent Systems) son simplemente sistemas compuestos por dos o más agentes o agentes inteligentes. Esto hace relevante encontrar una buena definición para agente y agente inteligente como la de Wooldridge que es citada en [27], que dice que un agente es una entidad software (o hardware) situada en un entorno que es capaz de reaccionar a cambios en ese entorno. El agente inteligente va más allá ya que extiende la definición de autonomía (implícita en la definición de agente) a una autonomía flexible, lo que implica
4 Esta sección está basada en [27].

Redes Inteligentes en la Protección de los Sistemas de Potencia
21
reactividad (habilidad de reaccionar a cambios en el entorno en un tiempo oportuno, realizando acciones basadas en esos cambios y en los objetivos individuales), pro-actividad (cambio del comportamiento dinámicamente a fin de lograr un objetivo) y habilidad social (interacción con otros agentes inteligentes).
Los MAS proveen una forma de construir sistemas flexibles y extensibles. Siendo la flexibilidad la habilidad de responder correctamente a situaciones dinámicas y para replicar estos comportamientos en diversos entornos y la extensibilidad la habilidad de añadir fácilmente nuevas funcionalidades al sistema. Según las especificaciones, muchas de estas características mencionadas son deseadas para la solución. Debido a estos beneficios que presentan los MAS, se escogió este tipo de arquitectura para desarrollar el SPI, i.e. una arquitectura basada en múltiples agentes. Con esto se espera lograr un sistema modular basado en agentes inteligentes autónomamente flexibles (por lo menos en cierto grado) que permita implementar y ejecutar funciones de protección sobre un sistema de transmisión. Como se menciona en [4], para añadir inteligencia a un sistema de transmisión es necesaria la presencia de procesadores independientes en cada componente que tengan un sistema operativo robusto y que sean capaces de actuar como agentes independientes que se puedan comunicar y cooperar con otros, formando así una gran plataforma de computación distribuida.
8.1.1.2. Red paralela de comunicaciones5
El concepto de un red de comunicaciones paralela es un poco más sencillo que el anterior pero totalmente necesario para implementar un Red Inteligente. Este concepto es tratado explícitamente en [4], en donde se habla también de la necesidad de agentes independientes. Esto se trata de que cada componente eléctrico que se encuentre en plantas de generación, subestaciones y demás infraestructuras eléctricas del sistema de transmisión, tenga una unidad de procesamiento independiente. Esta unidad de procesamiento debe darle al dispositivo la capacidad de comportarse como un agente independiente que pueda comunicarse e interactuar cooperativamente con los demás agentes inteligentes. Debido a esta necesidad de interacción y cooperación entre agente físicamente distantes, se hace necesaria la presencia de una red de comunicaciones paralela a la red eléctrica. Cada uno de los componentes interactúa eléctricamente de alguna manera con el sistema de transmisión y adicionalmente está dotado de una unidad de procesamiento que utiliza toda una infraestructura de comunicaciones para interactuar con los demás componentes y agentes inteligentes. La Figura 2 es una gráfica tomada de [4] que representa la forma en que varios procesadores se conectan a la red de comunicaciones al igual que lo hacen los dispositivos al sistema eléctrico que en este caso sería el sistema de transmisión.
5 Esta sección está basada en [4].

Redes Inteligentes en la Protección de los Sistemas de Potencia
22
Figura 2. Dispositivos conectados al sistema eléctrico y procesadores conectados a la red de comunicaciones paralela
6.
Esta red de comunicaciones paralela es indispensable para la implementación de una Red Inteligente ya que las comunicaciones son fundamentales para el intercambio de información entre diferentes agentes. Esta red de comunicaciones permitiría a los agentes utilizar sus habilidades sociales para poder cumplir con sus funciones interactuando cooperativamente con los demás agentes inteligentes que componen el sistema.
8.1.1.3. Sistema de control jerárquico7
El tercer pilar fundamental para el desarrollo de este proyecto es el sistema de protección de área amplia de 3 niveles propuesto en [10]. Este último concepto completa la estructura del SPI debido a que le da forma a la misma. Teniendo ya un sistema basado en agentes y una red de comunicación que permite la interacción entre estos sólo basta con organizar una jerarquía de control para poder darle las funciones a cada agente y no descentralizar por completo al sistema (los MAS son sistemas esencialmente distribuidos), característica que es aún importante en los sistemas eléctricos de transmisión.
En [10] se propone un sistema de protección de 3 niveles de jerarquía. El más bajo nivel consiste de PMUs (Phasor Measurement Units) y de SPTs (Terminales de Protección del Sistema). Los PMUs son utilizados para recolectar información y los SPTs para ejecutar los esquemas de protección. El siguiente nivel está compuesto por varios LPCs (Local Protection Centers) los cuales están conectados con varios PMUs y SPTs para recolectar datos y enviar información de control. Varios LPCs pueden cooperar para implementar el esquema de protección del sistema. El nivel más alto o con mayor jerarquía es el SPC (System Protection Center). Este se encarga de hacer cooperar los LPCs haciéndolos trabajar rumbo un objetivo común. Una de las grandes ventajas de este sistema es que teniendo información global del sistema se pueden tomar decisiones óptimas por medio de sistemas de computación de gran
6 Imagen tomada de [4].
7 Esta sección está basada en [10].
Redes Inteligentes en la Protección de los Sistemas de Potencia
23
desempeño. Esto implica una alta dependencia de los dispositivos centrales de control y del sistema de comunicación.
Tomando esta idea y modificándola un poco se estructura el SPI. La idea es desarrollar una estructura jerárquica de control que permita operar el sistema de protección de forma intermedia entre un sistema totalmente centralizado (i.e. el sistema presentado en [10]) y un sistema totalmente distribuido (i.e. un sistema MAS). Los diferentes agentes de control se clasificarán en tres niveles de jerarquía similares a los propuestos en [10], en cada uno de los cuales se tendrá cierto grado de autonomía que implica la toma de decisiones con la información disponible en cada nivel. Estas decisiones se tomarían con base en información recolectada localmente y adquirida de los demás agentes. De la misma forma, en el nivel superior se podrá tener acceso a toda la información del sistema de transmisión y por lo tanto se podrán tomar decisiones globales y óptimas para cada situación, ya sea local (específica de un lugar del sistema) o global.
8.1.2. Descripción del SPI propuesto
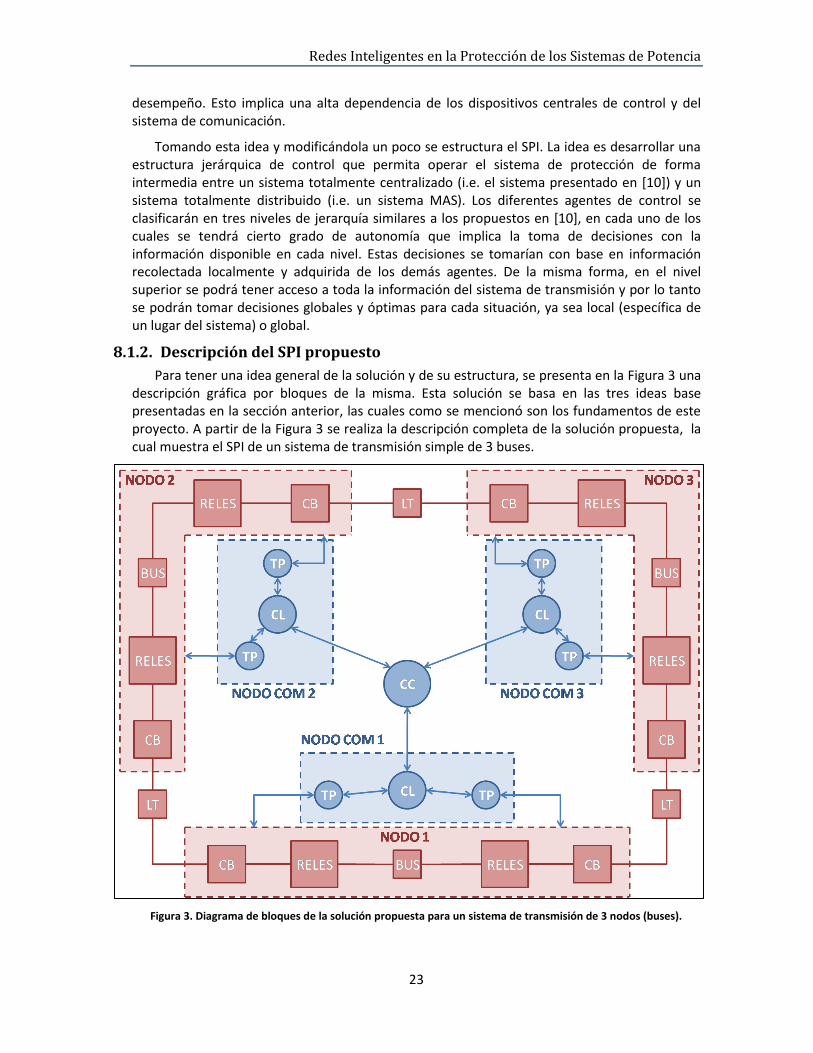
Para tener una idea general de la solución y de su estructura, se presenta en la Figura 3 una descripción gráfica por bloques de la misma. Esta solución se basa en las tres ideas base presentadas en la sección anterior, las cuales como se mencionó son los fundamentos de este proyecto. A partir de la Figura 3 se realiza la descripción completa de la solución propuesta, la cual muestra el SPI de un sistema de transmisión simple de 3 buses.
Figura 3. Diagrama de bloques de la solución propuesta para un sistema de transmisión de 3 nodos (buses).

Redes Inteligentes en la Protección de los Sistemas de Potencia
24
En síntesis, se propone un Sistema de Protección Inteligente de tres niveles de control basado en agentes que utiliza una red de comunicaciones paralela a la red eléctrica que permite el intercambio de información entre los agentes. A continuación se describen los diferentes agentes que componen el SPI.
8.1.2.1. Agentes
El sistema está compuesto por dos tipos de agentes: los agentes del sistema de control y los agentes del sistema de transmisión. Los agentes del sistema de transmisión son algunos de los elementos básicos de un sistema de este tipo y que normalmente hacen parte del sistema eléctrico. Es este caso y como se mencionó, la idea es dotar a estos elementos con una unidad de procesamiento que les de la capacidad de actuar como un agente independiente. El otro tipo de agente son los que pertenecen al sistema de control. Estos son los agentes que ejecutan las funciones de control del sistema de protección. Son los encargados de tomar decisiones de control y transmitirlas a los dispositivos de campo, es decir, a los agentes del sistema de transmisión. En la Figura 3 se pueden diferenciar estos tipos de agentes. Los agentes en los recuadros rojos son los agentes del sistema de transmisión y en los recuadros azules se encuentran los agentes del sistema de control. Cada recuadro rojo representa un nodo o bus del sistema de transmisión y cada recuadro azul representa el nodo paralelo de comunicaciones. A continuación se describen cada uno de los agentes comenzando desde los de más bajo nivel, es decir, los más cercanos a los dispositivos de campo.
Interruptor (CB)
El Interruptor o Circuit Breaker (CB) es un agente simple cuya función es controlar el estado del interruptor, el cual puede estar abierto, cerrado o en falla (averiado). El Interruptor es un agente receptor de mensajes básicos que pueden contener órdenes de cerrarse o de abrirse. Este por su parte es lo suficientemente inteligente como para tomar la decisión de si debe abrirse (o cerrase) o no según sean sus condiciones internas. El CB puede estar habilitado o no dependiendo de si ya ha sido operado o de si está bloqueado. Según la Figura 3, los CBs se encuentran ubicados entre una línea de transmisión y sus respectivas unidades de relés. Los Terminales de Protección (TPs) son los encargados de enviar las órdenes de control a los CBs, debido a que estos son los agentes de control de más bajo nivel. Se puede decir que los CBs son los actuadores básicos del sistema de protección.
Unidad de Bloqueo de CB
La Unidad de Bloqueo de CB es simplemente un subsistema del CB que puede recibir mensajes independientemente del CB, es decir, que no deben pasar por su agente CB. Debido a esto, se puede tratar en algunos casos como un agente independiente. En algunos casos es necesario bloquear los CBs para evitar su operación, debido a que es posible que sus respectivos relés detecten fallas que no les corresponde a estos aislar. Más adelante en las simulaciones se analizarán este tipo de condiciones. El CB intercambia información con su respectiva Unidad de Bloqueo para conocer si se encuentra bloqueado o no.
Relé
El Relé es uno de los agentes fundamentales del sistema de protección. Estos contienen los sensores que perciben el estado del sistema de potencia y por lo tanto perciben los diferentes fenómenos y eventos que ocurren en este. Hoy en día existen muchos tipos de relés que tienen un sinnúmero de funciones de detección de anomalías. Su objetivo es detectarlas y ejecutar el disparo de un interruptor para que un circuito se abra y evite daños mayores en la

Redes Inteligentes en la Protección de los Sistemas de Potencia
25
infraestructura. Normalmente cada relé está asociado a un interruptor. En este caso, cada relé le reportará las eventualidades no directamente a su respectivo CB, sino a su respectivo Terminal de Protección (TP) para que el sistema de control tome las decisiones respectivas acerca de que acciones son las que se deben ejecutar. Como se mencionó anteriormente, en el modelo del SPI sólo se incluirá la función de protección contra fallas de línea. Esto se realizará únicamente con el uso de relés de distancia, cuya función es detectar fallas en líneas adyacentes clasificándolas por zonas (la Figura 13 muestra la clasificación de las zonas asumidas para este trabajo). En [28] se puede encontrar información detallada sobre este tipo de relés de protección y muchos más. Es un libro bastante viejo pero ilustra de forma clara la filosofía del funcionamiento de los relés. Los Relés tienen comunicación directa con los CBs y con los TPs.
Figura 4. Estructura básica del sistema de control jerárquico del SPI.
Terminal de Protección (TP)
El Terminal de Protección es el agente del sistema de control de más bajo nivel. Este se comunica directamente con los dispositivos de campo (agentes del sistema de transmisión) transmitiendo órdenes de control hacia estos y recopilando información de los eventos que ocurren en el sistema de potencia. Este agente tiene varias funciones específicas. Estas son:
1. Informar al siguiente agente en la jerarquía de control (Control Local) de los eventos que requieren acciones inmediatas (i.e. fallas de línea detectadas por los relés).
2. Recibir y enviar a la Unidad de Bloqueo de cada CB las órdenes de bloqueo y desbloqueo que lleguen al TP.
3. Ejecutar las órdenes de apertura de CBs que se requieran como protección primaria de una línea de transmisión o como protección de respaldo de las mismas. Estas órdenes finalizan con el envío de un mensaje a los CBs que requieren operación.
4. Informar al Control Local de las fallas y aperturas que ocurran en los CBs.
Como se muestra en la Figura 4, cada uno de los Terminales de Protección se puede comunicar directamente con su respectivo superior (Control Local) de la misma forma que lo hace con los dispositivos de campo de su área. Existe un TP por cada bahía de línea en cada

Redes Inteligentes en la Protección de los Sistemas de Potencia
26
nodo o bus. Es decir que por cada línea de transmisión deben existir dos TP, uno en cada extremo.
Control Local (CL)
El Control Local es el siguiente agente del sistema de control del SPI. En la jerarquía del sistema del control se encuentra entre el Control Central y los TPs. El Control Local es, como indica el nombre, una unidad que controla una serie de agentes ubicados en un área geográfica o espacio reducido. En este caso se puede decir que cada CL se encarga de un nodo o bus eléctrico (i.e. subestaciones eléctricas del sistema de transmisión). Los CLs recopilan información de varios TP ubicados en el mismo nodo y a su vez les envía comandos de control. Por otra parte, cada CL envía información del sistema al Control Central y recibe mensajes de control de este último. La función principal de este agente servir de puente de información entre los TPs y el Control Central para el envío de mensajes en ambos sentidos.
Control Central (CC)
Finalmente, el CC es el agente de mayor jerarquía debido a que es quien tiene una visión global de todo el sistema de transmisión y puede tomar las decisiones óptimas o más acertadas, por encima de cualquiera de los demás agentes. El CC es único para todo el SPI y se comunica directamente con todos los CLs para hacerlos cooperar. De la misma forma que los agentes anteriores, el CC recibe información de sus agentes subordinados, procesa esta información y transmite por medio de la red de comunicaciones los mensajes necesarios para que las acciones correctivas se ejecuten. Todo esto se debe realizar en márgenes de tiempo de muy pequeña escala debido a los tiempos de respuesta de los sistemas de potencia y a los tiempos de propagación de las fallas. En este trabajo no se tendrán en cuenta estos tiempos de respuesta en absoluto. El Control Central debe recibir toda la información del sistema de transmisión, que es básicamente la leída por los relés y transmitida a través de los agentes hasta el CC. Con esta información el CC se hace una idea de lo que está ocurriendo en el sistema de potencia y en caso de identificar una situación o condición que requiera una acción inmediata, este transmite los comandos necesarios para que estas acciones sean ejecutadas por los agentes correspondientes. En otras palabras, el CC es el cerebro del sistema cuyo concepto del estado del sistema tiene mayor relevancia que el estado percibido por los agentes de menor jerarquía. Esto implica que las órdenes emitidas por el CC tienen prioridad sobre las emitidas por los demás agentes. El CC coordinará a todos los agentes para que el sistema reaccione como debe ante cualquier falla.
8.1.2.2. Tipos de mensajes
Los mensajes que son intercambiados entre los diferentes agentes pueden tener diferentes características. Estos se pueden diferenciar en varios aspectos como el tipo de contenido, la confiabilidad que requieren (proporcional a su relevancia) y los tiempos máximos de retardo de los mismos. Según estas características se pueden definir varios tipos de mensajes los cuales se diferenciarían con una etiqueta sobre el mismo mensaje que permita diferenciar el tipo de mensaje. En este trabajo no se pudieron incluir diferentes niveles de relevancia o de requerimientos de retraso a los mensajes debido a que esto implica la elaboración de un sofisticado sistema de comunicaciones que permita medir los tiempos de envío de los mensajes y las tasas de errores o de pérdida de mensajes.
La posibilidad de enviar diferentes tipos de mensajes se permite en cuanto al contenido de los mismos. Todos los mensajes tienen una estructura estándar, es decir, una cantidad de espacios predeterminados que pueden ser utilizados según la información que se desea enviar

Redes Inteligentes en la Protección de los Sistemas de Potencia
27
a otro agente, sin embargo estos espacios no tienen ningún requerimiento además del tipo de variable que deben contener (cada espacio tiene un tipo de variable asociado: entero, cadena de caracteres, variable binaria, entre otras). La única indicación que se debe seguir para el envío de mensajes, es que hay un único espacio designado para indicar la referencia del mensaje, espacio que es del tipo cadena de caracteres. Este espacio se denomina Referencia en el modelo y debe ser diferente para cada tipo de mensaje, por ejemplo un mensaje para bloquear un CB tiene como referencia la palabra ‘BLOQ’.
Más adelante, en la sección 8.2 se explicará una forma básica de este tipo de mensajes utilizados en el modelo realizado en redes de Petri coloreadas del SPI.
8.1.2.3. Descripción general
Hasta ahora se han descrito por separado los diferentes agentes que conforman el SPI, sin embargo no se ha descrito la operación del sistema de protección. Para explicar el funcionamiento del SPI, y más específicamente de la función que se implementará en el modelo (protección contra fallas de línea), se describirá como debe ser la operación del mismo en el momento en que ocurra una falla de línea en el sistema de transmisión.
Figura 5. Sistema de transmisión de 8 nodos con falla en línea 28.
Se tiene un sistema de transmisión de 8 buses interconectados por 8 líneas como se muestra en la Figura 5. Una falla ocurre en la línea L2 (línea que conecta el bus 2 y 3). La falla es percibida inmediatamente por todos los relés del bus 2 y del bus 3 (dentro de los límites de la protección primaria, es decir dentro de la zona 1 ó 2 de los relés) y alcanza a ser percibida (fuera de los límites de la protección primaria y dentro de los límites de protección de respaldo, es decir dentro de la zona 3) por los relés R43, R73, R62 y R12 (siendo el primer digito el bus en el cual están ubicados geográficamente los relés y el segundo dígito el bus hacia el cual se dirige la línea de transmisión). Todos los relés que perciben la falla en la zona 1 reportan el evento inmediatamente a su respectivo TP (por ejemplo el relé R23 le reporta al TP23 y el R32 al TP32), incluyendo en el mensaje la dirección de la falla y el relé desde el cual fue detectada. Las fallas de zonas 2 y 3 son reportadas con retardos predeterminados. La Figura 6 muestra un ejemplo de la relación entre los tiempos de retardo de operación de los relés de distancia y la impedancia o zona percibida por los mismos. Cuando estos mensajes son recibidos en los TPs,
8 Imagen tomada de [14].

Redes Inteligentes en la Protección de los Sistemas de Potencia
28
estos últimos envían un mensaje a cada CB para que sean operados (abiertos) y a su vez reportan de inmediato este evento a su respectivo CL. La operación de los CBs tiene un retardo determinado que permite realizar las siguientes acciones: Los CLs, ahora con estos mensajes, los retransmiten al CC indicando adicionalmente si cada uno de los relés detectó una falla interna o externa (se dice que una falla es interna si está en la dirección de protección del respectivo relé de distancia) para que este pueda tomar las decisiones reactivas necesarias. Al CC llegan entonces un total de 6 mensajes de zona 1 (R21, R26, R23, R32, R37 y R34) de los cuales sólo 2 indican fallas internas (R23 y R32).
La acción que sería ejecutada si el CC no estuviera presente sería la apertura de todos los interruptores de los buses 2 y 3. Sin embargo, el CC encuentra esto innecesario debido a que, por los reportes que tiene, es posible saber que la falla se encuentra únicamente en la línea L2. La acción que debe ser tomada es abrir únicamente los interruptores CB23 y CB32. Para que esto ocurra, el CC envía mensajes de bloqueo para los demás interruptores, es decir, para aquellos cuyas fallas detectadas fueron externas. Estos mensajes se envían de nuevo a través de los CLs y de los TPs hasta las Unidades de Bloqueo de los CBs.
En ese momento se cumple el tiempo de espera para la apertura de los CBs y sólo aquellos CBs que no están bloqueados y que detectaron fallas de zona 1 operan finalmente. Estos serían los interruptores CB23 y CB32. Luego de esta acción los CB bloqueados son desbloqueados para poder continuar su operación normal.
Figura 6. Tiempo de operación del relé de distancia en función de la zona o impedancia detectada.
Según esta descripción, desde que la falla ocurre hasta que esta es despejada, un mensaje es enviado desde cada Relé hasta el CC y es enviado de vuelta hasta la Unidad de Bloqueo del respectivo CB. Esto significa que se está contando con una red de comunicaciones de muy buen desempeño (velocidad y confiabilidad) debido a que las distancias que deben recorrer estos mensajes son bastante largas, pues los sistemas de transmisión se caracterizan por abarcar áreas geográficas muy amplias. Este es definitivamente un factor crítico de esta propuesta, pues en caso de que los mensajes sufran retardos excesivos se pueden presentar aperturas innecesarias de interruptores que no alcanzaron a ser bloqueados, lo que se traduce en áreas sin fallas desenergizadas.
Ahora bien, en caso de que alguno de estos dos interruptores falle en su apertura (CB23 y CB32), ocurre lo siguiente: Como se mencionó en el anterior caso, los relés de protección de

Redes Inteligentes en la Protección de los Sistemas de Potencia
29
respaldo reportan fallas de zona 3. En el caso anterior, una vez la falla es despejada por los interruptores de protección primaria, los relés de respaldo dejan de detectarla y por lo tanto no envían los mensajes de apertura para los interruptores de respaldo. Siguiendo el ejemplo de la Figura 5, y en el caso en que el interruptor CB23 falle (es decir que no opere y permanezca cerrado) por un motivo desconocido, las acciones a seguir son: Debido a que la falla permanece, los relés de respaldo del interruptor CB23 continúan percibiendo la falla. Una vez se cumple el tiempo predefinido para las fallas de zona 3, el relé envía el mensaje al TP respectivo para ejecutar la apertura de los CBs de respaldo (CB12 y CB62). Los mensajes son transmitidos igualmente hasta el CC como fallas internas (debido a que la falla está en su dirección de protección) y por lo tanto no se envía mensaje de bloqueo para estos CBs. Ambos CBs son abiertos y la falla finalmente es despejada. El sistema tiene los interruptores CB32, CB12 y CB62 abiertos y el CB23 con una falla reportada. En este caso todo el bus B2 salió de operación por la falla del interruptor a diferencia del caso anterior donde sólo la línea L2 salió de operación. Sin embargo bajo esas circunstancias, esta última es la mejor decisión que se puede tomar ya que es la que menos buses y líneas saca de operación teniendo en cuenta la funcionalidad de los relés utilizados.
8.1.2.4. Posibles funciones de protección
Además de la función de protección ya descrita que es desempeñada por los relés de distancia, es posible implementar diferentes funciones de protección sobre la plataforma SPI. Las funciones que pueden ser implementadas intuitivamente son aquellas desempeñadas por diferentes relés de protección que existen hoy en día para sistemas de transmisión.
Una función que sería bastante interesante es la de recierre automático de interruptores. Debido a las capacidades de los sensores y medidores electrónicos actuales, existe la posibilidad de reconectar un circuito y medir en un muy corto periodo de tiempo si la falla está aún presente. Esto permitiría identificar si es posible reconectar los interruptores y energizar de nuevo las líneas cuyas fallas se hayan despejado.
Otra posible función es la desempeñada por los relés de sobrecorriente unidireccionales o bidireccionales. Añadiendo este tipo de relés a la plataforma del SPI, sería posible tomar decisiones aún más convenientes para el sistema y que posiblemente puedan realizar las funciones de respaldo de una manera más eficiente. Con este tipo de relés se podría por ejemplo incluir la función de protección contra fallas de buses que no fue considerada en este proyecto.
A medida que el sistema gane complejidad y se diversifiquen las funciones que puede desempeñar, se podrán incluir fallas más complejas y específicas como fallas trifásicas, fallas fase-fase, fallas monofásicas, entre otras. Esto sólo se podrá lograr desarrollando un SPI lo suficientemente complejo como para proteger un sistema de transmisión entero.
A continuación se presenta el modelo del SPI realizado en redes de Petri coloreadas, por medio del cual se pretende simular el sistema de protección en una red de transmisión de prueba de 6 nodos.
8.2. Trabajo Computacional: Modelo del SPI en redes de Petri coloreadas
El modelo desarrollado es tal vez el aporte más importante de este trabajo, pues es a este al que más tiempo se le dedicó. Inicialmente se realizó una búsqueda de la herramienta apropiada para realizar el modelo, ya que era de esperarse que el resultado fuera un modelo considerablemente complejo teniendo en cuenta los modelos realizados en [11][12] sobre sistemas de protección para redes de transmisión. El único factor que desde un principio se

Redes Inteligentes en la Protección de los Sistemas de Potencia
30
decidió fue el tipo de modelo que se realizaría, un modelo utilizando redes de Petri. Esto fue una sugerencia del asesor que fue bien recibida, debido a que esta herramienta grafico-matemática presenta muchos beneficios al ser utilizada para representar sistemas basados en eventos discretos y concurrentes. Además, ha sido utilizada ampliamente para modelar sistemas de potencia y específicamente sistemas de protección.
Investigando un poco sobre este tipo de modelos, se identificó la necesidad una herramienta de modelación más poderosa que pudiera representar sistemas de gran complejidad. Se optó por utilizar redes de Petri coloreadas, una versión de más alto nivel que las redes de Petri tradicionales tal y como se menciona en la sección 4.7. Esta herramienta es utilizada en [12] para modelar un sistema de protección complejo similar a lo que se buscaba en este trabajo. Finalmente, se realizó la búsqueda de un software adecuado para desarrollar el modelo debido a que esto facilitaría la elaboración del modelo. Rápidamente se llegó a la herramienta CPN Tools© en su versión 2.2.0 desarrolladla por el CPN Group de la University of Aarhus en Dinamarca. Esta es una herramienta computacional que soporta la construcción, simulación, análisis de espacio de estados y análisis de desempeño de modelos CPN (Coloured Petri Nets o Redes de Petri Coloreadas-RPC). Esta herramienta tiene un excelente manual en línea9 y es fácil de utilizar una vez se aprenden algunos detalles básicos.
El modelo se planeó y desarrolló de tal forma que no fuera necesario realizar mayores modificaciones al mismo para representar diferentes sistemas de potencia. Esto implicó más trabajo, sin embargo facilita la simulación de diversas redes de transmisión. En redes de Petri, lo anterior se traduce en que el modelo tiene siempre la misma estructura 𝑁 (tomando este concepto definido en la Tabla 1 pero haciendo una analogía para el caso de las RPC), es decir, tiene siempre los mismos lugares, transiciones, arcos e inscripciones en cada uno de los elementos. Para simular el SPI de una red de transmisión, basta con definir la marca inicial del mismo. Esta marca inicial está compuesta por una serie de constantes (al igual que en los lenguajes de programación) que definen el número de nodos, líneas de transmisión y relés del sistema.
El modelo está compuesto por 8 subredes que se encuentran interconectadas a través de lugares denominados fusion places o lugares de fusión que la herramienta computacional permite construir para hacer más práctico el modelo. Un lugar de fusión es simplemente un único lugar que puede tener varias copias, las cuales pueden estar en varias subredes o en la misma red. Cada una de las copias es tratada como un lugar normal y todo lo que ocurre en cada una de las copias ocurre en todo el conjunto de copias de la misma forma. Los lugares de fusión se reconocen por tener una etiqueta de fondo azul claro con borde azul oscuro cerca al mismo. Todos los lugares con la misma etiqueta son entonces el mismo lugar.
Como sistema de prueba se seleccionó el sistema de 6 nodos de PSAT. Este es un sistema de transmisión simple y se utilizará para describir y simular el modelo CPN. El sistema tiene un total de 6 buses y 11 líneas de transmisión. El sistema se muestra en la Figura 7.
9 Ver el link http://wiki.daimi.au.dk/cpntools-help/_home.wiki donde se encuentra el manual de usuario
completo. En [16] se puede encontrar además todo un soporte teórico sobre redes de Petri coloreadas, ejemplos y aplicaciones.

Redes Inteligentes en la Protección de los Sistemas de Potencia
31
Figura 7. Sistema de prueba de 6 buses para el modelo del SPI.
En la siguiente sección se describe cada una de las subredes que conforman en conjunto el modelo CPN del Sistema de Protección Inteligente (SPI). Se podría decir que cada subred es un agente del sistema, sin embargo existen dos subredes adicionales que hacen parte del Interruptor (Habilitación CB y Bloqueo CB) y otra más que es necesaria para la generación de fallas de línea.
8.2.1. Subredes (Agentes)
Como se podrá percibir en la descripción de estas subredes, cada uno de los agentes representa todos los agentes del mismo tipo sin importar el número que existan. Es decir, la subred denominada ‘CB’ representa todos los agentes ‘CB’ que tenga el sistema de protección modelado. Para hacer más legible el modelo, se le dio un color diferente al negro a todos los lugares de fusión que pertenezcan a otra subred. De esta manera se puede identificar fácilmente por medio de que lugares se comunican los agentes.
8.2.1.1. Línea Transmisión
Esta subred está compuesta por 3 lugares de fusión, 2 transiciones y 7 arcos y como se mencionó anteriormente, no es un agente. El lugar LINEA LIBRE DE FALLA tiene como marca inicial todas las líneas de transmisión de la red de transmisión modelada, indicando que inicialmente todas las líneas se encuentran libres de falla. La transición OCURRE FALLA es la encargada de tomar en cada unidad de tiempo cada una de las 11 líneas de transmisión y

Redes Inteligentes en la Protección de los Sistemas de Potencia
32
someterlas a una probabilidad de 1% de que ocurra una falla (para cada una de las líneas). Este mecanismo es simplemente para simular la probabilidad de que ocurran fallas en las líneas de transmisión de un sistema de potencia real. En caso de no ocurrir (i.e. en caso de que la función menor1(1) retorne falso) una falla para una ficha (que representa una línea de transmisión) esta misma retorna el lugar LINEA LIBRE DE FALLA. Cuando una falla ocurre en una de las líneas (i.e. la función menor1(1) retorna verdadero), una ficha pasa al lugar LINEA CON FALLA y otra al lugar HAY FALLA. Mientras el lugar LINEA CON FALLA tenga una ficha, la condición de que hay una falla en esa línea es verdadera. El lugar HAY FALLA representa la condición de que no se ha realizado ninguna acción para despejar la falla, es decir, sólo el SPI podría desaparecer la ficha del lugar HAY FALLA una vez haya realizado las acciones pertinentes para despejar la falla que representa. Por otra parte, la ficha en el lugar LINEA CON FALLA representa el hecho físico de la falla en la línea por lo tanto puede desaparecer por si sola (en caso de que la falla sea despejada por cualquier otro motivo). La transición FALLA SE DESPEJA es similar a OCURRE FALLA; esta se encarga de evaluar cada unidad de tiempo la probabilidad de que la falla se despeje por sí sola. Esta transición permanecerá deshabilitada siempre debido a que no se ha desarrollado la función de reconexión (ver junto a la transición FALLA SE DESPEJA el [false] que significa que la transición está deshabilitada), por lo tanto no tiene ninguna repercusión práctica el hecho de que una falla se despeje por sí sola, de cualquier forma el SPI realizará sus acciones correctivas una vez ocurrida la falla.
Figura 8. Subred denominada ‘Línea Transmisión’.
En síntesis, esta subred es la encargada de generar aleatoriamente fallas en las líneas de transmisión existentes. Indica si las líneas tienen o no fallas, y en caso de tener fallas indica si el SPI ya realizó sus acciones correctivas, es decir si ya se despejó la falla.
Las fichas que indican que ocurrió una falla (fichas del lugar HAY FALLA) tienen la siguiente composición: el número de relés del SPI indicado con la constante NumReles que es igual a 44 en el sistema modelado (cuatro por cada línea de transmisión: dos relés de distancia y dos relés de dirección), una etiqueta que identifica el tipo de falla (FLINEA identifica una falla de línea las cuales son las únicas que se utilizarán), dos números enteros que para el caso de falla de línea representan los buses entre los cuales ocurre la falla (en la Figura 8 ocurre en la línea L12, es

Redes Inteligentes en la Protección de los Sistemas de Potencia
33
decir entre los buses 1 y 2) y finalmente otro número entero que significa el lugar en el cual ocurrió la falla (en este caso se tiene una falla en el 50% de la línea L12 contando desde el primer bus que se muestra, i.e. desde el bus 1).
8.2.1.2. CB (Interruptor)
Este agente está compuesto por 5 lugares de fusión, 4 transiciones y 12 arcos. De estos elementos, los centrales son los lugares CB ABIERTO y CB CERADO y las transiciones ABRIR CB y CERRAR CB que unen estos lugares. Inicialmente todos los CBs del sistema se encuentran cerrados (i.e. todas las fichas correspondientes a CBs en el lugar CB CERRADO) como se puede ver en la Figura 9 (se tienen 22 CBs en total, 2 por cada línea de transmisión). El siguiente lugar en orden de importancia es el CB FALLA (CERRADO). Este indica cuando un CB falló al ser operado (es decir que no se abrió). De esta forma cada CB debe estar en alguno de estos tres lugares que representa alguna de estas condiciones: abierto, cerrado o averiado (permanece cerrado). Los demás lugares y transiciones son las encargadas de recibir los mensajes que vienen del respectivo TP (órdenes de cierre o apertura) y de validarlas. Para validarlas es necesario saber si la orden que se recibe representa un cambio o no (un mensaje que requiere el cierre de un CB que ya está cerrado no representa un cambio y por lo tanto es descartada) y además, en el caso de la apertura de un CB, el CB debe estar habilitado. Debido a la mediana complejidad del habilitador de los CBs, se realizó en una subred aparte denominada HABILITACION CB. Este se describe a continuación.
Figura 9. Subred correspondiente al agente denominado ‘CB’.
8.2.1.3. Habilitación CB
Esta subred pertenece al agente CB y está compuesta por 5 lugares de fusión, 4 transiciones y 12 arcos. El lugar principal de esta subred es HABILITADOR CBs. Este lugar tiene siempre 22 fichas que representan los 22 CBs. Cada CB tiene su identificador de dos dígitos (bus donde se encuentra y bus del otro extremo de la línea que protege) y un tercer dígito que puede ser cero o uno. Como muestra la Figura 10, el cero significa que el CB se encuentra habilitado y el uno deshabilitado. Este lugar central está rodeado de 4 transiciones principales: una que se encarga de habilitar los CBs en el momento en que se encuentran desbloqueados y cerrados

Redes Inteligentes en la Protección de los Sistemas de Potencia
34
simultáneamente y otras tres que se encargan de deshabilitarlos ya sea por estar abiertos, bloqueados o averiados. La tarea de bloquear o desbloquear a los CBs se le deja a una tercera subred que es a su vez un agente debido a que puede comunicarse con otros agentes a través de mensajes. Este se describe a continuación.
Figura 10. Subred ‘Habilitación CB’ que pertenece al agente ‘CB’.
8.2.1.4. Bloqueo CB
Esta subred es también un agente que hace parte del agente ‘CB’. Está compuesto por 3 lugares de fusión, 4 transiciones y 8 arcos. Esta subred es similar a las dos anteriores. Se tienen dos lugares principales: CB BLOQUEADO y CB DESBLOQUEADO. Todos los CBs deben estar en alguno de estos dos estados (en la marca inicial todos están desbloqueados). A estos le siguen dos transiciones principales que son las encargadas de cambiar de estado a los CBs (BLOQUEAR CB y DESBLOQUEAR CB). El lugar del centro MSJ DE TP funciona como un buzón de mensajes que recibe los mensajes enviados desde el TP correspondiente a cada CB. Estos mensajes pueden tener una orden de bloqueo o de desbloqueo y sólo con un mensaje de estos se puede hacer cambiar el estado de un CB. Las otras dos transiciones simplemente descartan mensajes que no generarán cambio alguno (i.e. un mensaje que ordene el bloqueo de un CB que ya esté bloqueado).

Redes Inteligentes en la Protección de los Sistemas de Potencia
35
Figura 11. Agente ‘Bloqueo CB’ que pertenece al agente ‘CB’.
Con esta subred se finaliza el agente ‘CB’. En resumen, para que un CB pueda abrirse es necesario que esté habilitado. Para que un CB este habilitado, debe estar cerrado y desbloqueado, de lo contrario estará deshabilitado y no podrá ser abierto. En el momento en que un CB falla y queda averiado se deshabilita.
8.2.1.5. Relé
El Relé es uno de los agentes más importantes. Este es bastante complejo ya que está compuesto por 7 lugares de fusión, 5 lugares (regulares), 5 transiciones y 26 arcos. En este agente no se tienen elementos principales. Todos hacen parte fundamental de una cadena de detección y reporte de fallas. Lo que si hay es un punto inicial donde todos los relés se encuentran en la marca inicial, este es el lugar ESPERA. En este lugar los relés están esperando que una falla se presente en el lugar HAY FALLA (original de la subred ‘Linea Transmision’) para evaluar cuales de estos la detectarían. De esta forma los relés desencadenan una serie de acciones de reporte a los agentes de control. Una vez un relé detecta una falla y su respectivo CB está habilitado para su apertura (de no estar habilitado no es necesario hacer todo el proceso pues ningún CB se abrirá), depende del tipo del relé las acciones a seguir. En caso de que sea un relé de dirección, la única acción resultante es el envío de un mensaje al respectivo TP que reporta la falla a través del lugar MSJ A TP 1. Si el relé es de distancia, además de enviar el mensaje al TP, la ficha pasa al lugar RETARDO POR ZONA con la siguiente información: n y m son los dígitos que indican la ubicación del relé, k indica el número del relé en esa ubicación (los relés de distancia son k=1 y los de dirección son k=2), z indica la zona en la que el relé detectó la falla (la clasificación de las zonas y el significado de las mismas se muestra en la Figura 13) y finalmente tipo indica el tipo de relé (distancia o dirección). De este lugar las fichas pasan por la transición EJECUTAR DISPARO y dependiendo de la zona (z) son clasificadas. Las de zona 1 y 2 pasan a lugar CB OPERANDO lo que quiere decir que se ordenará la operación del CB respetivo y simultáneamente se envía un mensaje a TP enviando una ficha al lugar MSJ A TP 2, transmitiendo la orden de que el CB debe ser abierto. Por otra parte, las fichas de zona 3 pasan al lugar EVALUAR NECESIDAD DISPARO. En este lugar se espera a que las condiciones para ejecutar una apertura de respaldo se cumplan. Para que estas condiciones se cumplan, se

Redes Inteligentes en la Protección de los Sistemas de Potencia
36
esperan dos unidades de tiempo, lo suficiente para que el relé reciba un mensaje del TP que indique la falla de un CB, lo que hace necesaria la operación de los CBs de respaldo (en caso de no recibir este mensaje la apertura de los relés de respaldo no es necesaria). Cuando se cumplen las dos unidades de tiempo, la transición SE REQUIERE CB DE RESPALDO se ejecuta. En caso de no haber recibido el mensaje se llevan el par de relés de vuelta a estado inicial (ambos relés, el de distancia y el de dirección, al lugar ESPERA), y simultáneamente se envía un mensaje al respectivo TP ordenando el desbloqueo del CB (como medida preventiva para asegurarse de que estará listo para una siguiente operación). En el caso de que se requiera la operación del CB, se envían ambos relés al lugar CB OPERANDO y simultáneamente se envía otro mensaje al TP ordenando la apertura del CB.
En este lugar quedaron anteriormente las fichas de los relés que detectaron fallas en la zona 1. En este lugar, se tienen entonces las fichas de los relés que están esperando la operación del respectivo CB. Estos relés sólo pasarán a su estado inicial ESPERA en caso de que no sean operados (i.e. abiertos). Aquellos relés cuyos CBs sean efectivamente abiertos se quedarán en este lugar permanentemente ya que no estarán más habilitados. Por el contrario, aquellos que sean bloqueados y por lo tanto permanezcan cerrados, una vez desbloqueados estarán habilitados de nuevo y pasarán al estado inicial, donde podrán pasar por todo el proceso de detección de nuevo. Los relés que quedan en el lugar CB OPERANDO no podrán ser utilizados de nuevo en este modelo debido a que no existe la función de recierre o reconexión, lo que implica que quedarán abiertos hasta el final de la simulación.
Figura 12. Agente ‘Relé’.
A continuación se describe el siguiente agente en la cadena del SPI, este es el Terminal de Protección (TP) que es el encargado de comunicarse con todos los agentes y subredes que se han descrito hasta ahora, pues es el agente de más bajo nivel de los agentes pertenecientes al sistema de control.

Redes Inteligentes en la Protección de los Sistemas de Potencia
37
Figura 13. Clasificación y significado de las zonas de protección de los relés.
8.2.1.6. Terminal de Protección (TP)
Este tipo de agente es al igual que el anterior bastante complejo. Este es el primer agente y de más bajo nivel de jerarquía de los agentes del sistema de control. Está compuesto por 14 lugares de fusión, 5 lugares (regulares), 11 transiciones y 33 arcos. Está diseñado para que funcione entorno a su buzón de mensajes MSJS RECIBIDOS, que es donde recibe todos los mensajes de los demás agentes con los que se comunica (recibe mensajes de los CLs y de los Relés). Las funciones que desempeña son varias. La primera es la de recibir y reenviar mensajes de bloqueo y desbloqueo de CBs. Estos mensajes los puede recibir tanto del CL como de los Relés y los reenvía directamente a al agente ‘Bloqueo CB’ para que este ejecute la orden. La siguiente función es reportar las fallas ocurridas (reportadas al TP por los Relés) al CL, lo que hace retransmitiendo los mensajes directamente.
Finalmente, su función más elaborada es la de ejecutar las órdenes de apertura de CBs que recibe de los Relés. En cuanto recibe un mensaje de apertura de un CB, este pasa al lugar CB OPERANDO a través de la transición EJECUTAR DISPARO. Simultáneamente esto ocasiona el envío de un mensaje al respectivo CB ordenando la inmediata apertura del mismo. En este lugar, la ficha espera una unidad de tiempo para que la orden pueda ser ejecutada. Una vez pasado este tiempo se evalúa el estado, si el CB fue abierto se envía un mensaje al CL indicando la apertura del mismo. En caso de que no se abra el CB hay dos posibilidades: la primera es que el CB se encuentre en el estado cerrado, por lo tanto se asume que estaba bloqueado y no debía operar (se envía simultáneamente un mensaje de desbloqueo al agente ‘Bloqueo CB’ para desbloquearlo y que este pueda operar de nuevo). La segunda posibilidad es que el CB se encuentre averiado (en el estado de falla), lo que significa que todos los CBs de respaldo deben operar. El TP es el encargado de habilitar y dar razón a los Relés de que los CBs de respaldo deben operar. Para esto, el lugar NUMERO CBs REMOTOS EN LINEAS ADYACENTES A CADA BUS realiza un conteo al inicio de cada simulación del modelo de cuantos CBs remotos respaldan a cada bus. Este número de CBs se pasa con la ficha al lugar CB REQUIERE RESPALDO, en donde cada uno de estos CBs (menos el de la línea que contiene el CB que ha fallado) es habilitado enviándole un mensaje a los Relés, que permite su apertura por respaldo. La Figura 14 muestra la subred del agente ‘Terminal Protección’.
La siguiente subred que se describe es la del agente ‘Control Local’ que es el siguiente en la jerarquía de control.
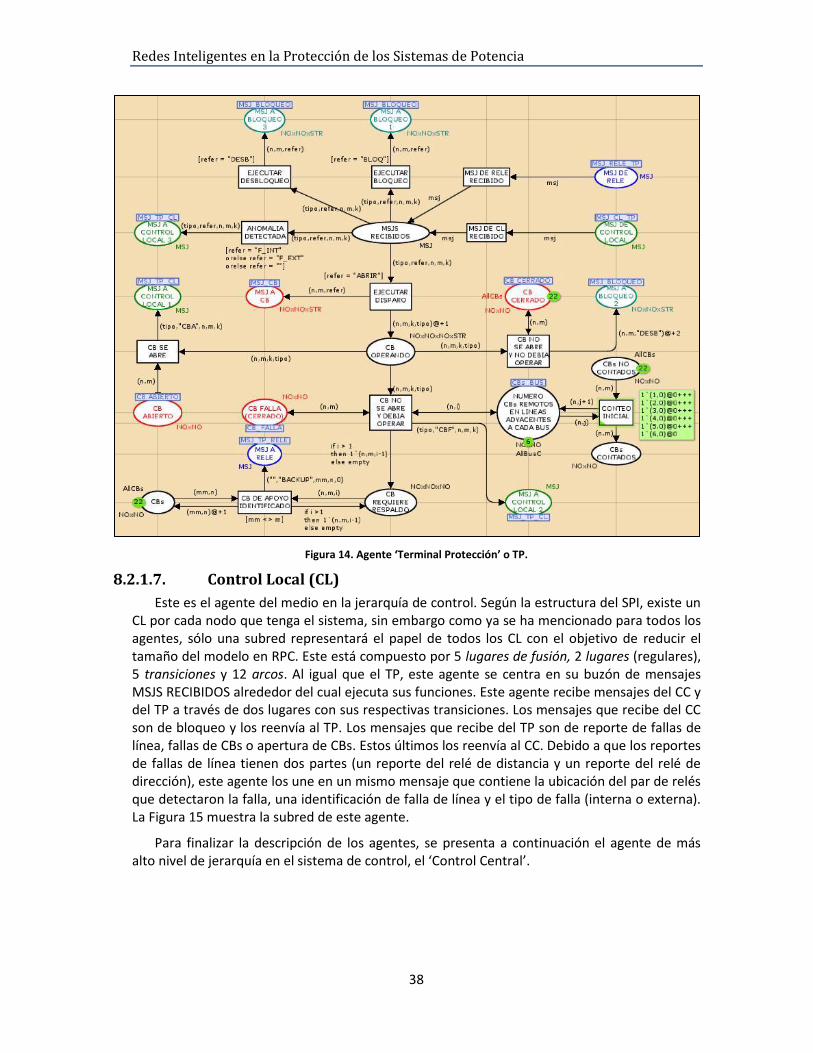
Redes Inteligentes en la Protección de los Sistemas de Potencia
38
Figura 14. Agente ‘Terminal Protección’ o TP.
8.2.1.7. Control Local (CL)
Este es el agente del medio en la jerarquía de control. Según la estructura del SPI, existe un CL por cada nodo que tenga el sistema, sin embargo como ya se ha mencionado para todos los agentes, sólo una subred representará el papel de todos los CL con el objetivo de reducir el tamaño del modelo en RPC. Este está compuesto por 5 lugares de fusión, 2 lugares (regulares), 5 transiciones y 12 arcos. Al igual que el TP, este agente se centra en su buzón de mensajes MSJS RECIBIDOS alrededor del cual ejecuta sus funciones. Este agente recibe mensajes del CC y del TP a través de dos lugares con sus respectivas transiciones. Los mensajes que recibe del CC son de bloqueo y los reenvía al TP. Los mensajes que recibe del TP son de reporte de fallas de línea, fallas de CBs o apertura de CBs. Estos últimos los reenvía al CC. Debido a que los reportes de fallas de línea tienen dos partes (un reporte del relé de distancia y un reporte del relé de dirección), este agente los une en un mismo mensaje que contiene la ubicación del par de relés que detectaron la falla, una identificación de falla de línea y el tipo de falla (interna o externa). La Figura 15 muestra la subred de este agente.
Para finalizar la descripción de los agentes, se presenta a continuación el agente de más alto nivel de jerarquía en el sistema de control, el ‘Control Central’.

Redes Inteligentes en la Protección de los Sistemas de Potencia
39
Figura 15. Agente ‘Control Local’ o CL.
8.2.1.8. Control Central (CC)
El Control Central es el agente de mayor nivel en el sistema de control del SPI. Este es el encargado de tomar decisiones globales sobre el sistema debido a que tiene toda la información del mismo. Este está compuesto por 3 lugares de fusión, 12 lugares (regulares), 12 transiciones y más de 35 arcos. Como se puede ver en la Figura 16, el CC sólo se comunica con los CLs (lugares de color rojo en la parte superior). El lugar inicial de este agente es MSJ DE CONTROL LOCAL, debido a que a partir de los mensajes que recibe del CL ejecuta sus acciones.
El CC recibe tres tipos de mensajes: El primero es un mensaje de falla de línea que puede ser de tipo interna o externa, el segundo es el mensaje que indica la apertura de un CB y el tercero es el mensaje que indica la falla de un CB. En caso de ser una falla externa, el mensaje pasa a través del BUZON 2 y la transición FALLA EXTERNA IDENTIFICADA. Esto hace que de inmediato se envíe un mensaje de bloqueo para el respectivo relé que detectó la falla a su respectivo CL. En caso de ser una falla interna, el mensaje pasa a través del BUZON 1 y la transición FALLA INTERNA IDENTIFICADA hasta el lugar FALLA INTERNA. En este lugar se almacenan las fallas de líneas internas identificadas hasta que se tienen un par de fallas que juntas implican la falla de una línea. Por ejemplo, si se acumula el mensaje de falla interna del relé R12 con el mensaje de falla interna del relé R21, se identifica una falla de línea en L12 debido a que los relés de ambos extremos la identificaron. Al ser identificada una falla de línea, se pasa una ficha al lugar LINEA CON FALLA DETECTADA a través de la transición FALLA DE LINEA IDENTIFICADA.
De manera similar, al recibir un mensaje de CB abierto o de CB averiado se pasa al BUZON 3 y de este, a través de la transición FALLA O APERTURA DE CB DETECTADA, al lugar CBAs CBFs. Hasta este punto se tienen las fallas de línea en el lugar LINEA CON FALLA DETECTADA y las aperturas o fallas de CBs en el lugar CBAs CBFs. Esta información es almacenada en estos

Redes Inteligentes en la Protección de los Sistemas de Potencia
40
lugares hasta que se cumple una de las siguientes (4) condiciones que desencadenarían alguna acción:
1. Se identifica que el primero10 de los interruptores (que se llamará A) de la línea con falla (que se llamará X) ha sido abierto.
2. Se identifica que el segundo de los interruptores (que se llamará B) de la línea X ha sido abierto.
3. Se identifica que el interruptor A de la línea X ha fallado (i.e. está averiado y permanece cerrado).
4. Se identifica que el interruptor B de la línea X ha fallado (i.e. está averiado y permanece cerrado).
Cuando ocurre la condición (1), una ficha pasa al lugar PRIMERA CONDICION CUMPLIDA. De la misma forma, cuando ocurre la condición (2) una ficha pasa al lugar SEGUNDA CONDICION CUMPLIDA.
Por otra parte, cuando ocurre la condición (3) una ficha pasa al lugar CBs DE RESPALDO DEL 1ER CB. En este lugar se espera que los CBs de respaldo del interruptor A (que ha fallado) sean abiertos (el lugar NUMERO CBs REMOTOS EN LINEAS ADYACENTES A CADA BUS tiene la cuenta del número de CBs que deben ser abiertos y por medio de los mensajes de CB abiertos que recibe el CC se realiza la comparación). Una vez se abren todos los CBs de respaldo de A, una ficha pasa al lugar PRIMERA CONDICION CUMPLIDA. Exactamente el mismo proceso se lleva a cabo cuando se cumple la condición (4) pero esta vez con el interruptor B. Al reportarse la apertura de todos los CBs de respaldo del interruptor B (que ha fallado), una ficha pasa al lugar SEGUNDA CONDICION CUMPLIDA.
Sólo basta con que se tenga una ficha en el lugar PRIMERA CONDICION CUMPLIDA y una ficha en el lugar SEGUNDA CONDICION CUMPLIDA (referentes a una falla en la misma línea) para que la transición FALLA DE LINEA DESPEJADA sea ejecutada. Es evidente que sólo podrá llegar una ficha a cada uno de estos lugares, debido a que el interruptor A no puede abrirse y fallar al mismo tiempo, es decir, que la condición (1) y la condición (3) no pueden ocurrir por la misma falla. Lo mismo sucede con el interruptor B y las condiciones (2) y (4).
Cuando la transición FALLA DE LINEA DESPEJADA ocurre, significa que la falla que se encontraba en el lugar LINEA CON FALLA DETECTADA se logró despejar. Esta pudo ser despejada por las protecciones primarias o por las protecciones de respaldo. En el lugar FALLA DE LINEA DESPEJADA es donde finalmente (después de toda una simulación) se pueden observar las fallas que han sido despejadas por el SPI.
10
Con el primer interruptor se refiere cualquiera de los dos interruptores de la línea en falla que haya pasado por la transición en primer lugar, es decir que el orden en este caso no es importante.
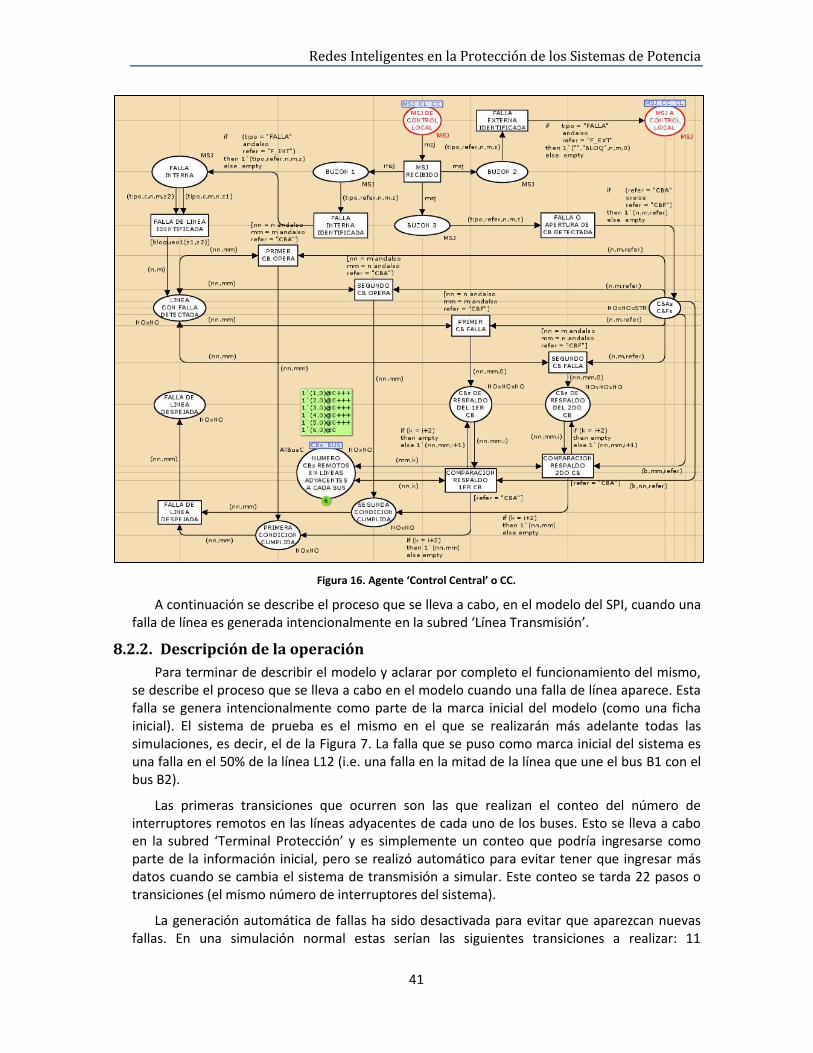
Redes Inteligentes en la Protección de los Sistemas de Potencia
41
Figura 16. Agente ‘Control Central’ o CC.
A continuación se describe el proceso que se lleva a cabo, en el modelo del SPI, cuando una falla de línea es generada intencionalmente en la subred ‘Línea Transmisión’.
8.2.2. Descripción de la operación
Para terminar de describir el modelo y aclarar por completo el funcionamiento del mismo, se describe el proceso que se lleva a cabo en el modelo cuando una falla de línea aparece. Esta falla se genera intencionalmente como parte de la marca inicial del modelo (como una ficha inicial). El sistema de prueba es el mismo en el que se realizarán más adelante todas las simulaciones, es decir, el de la Figura 7. La falla que se puso como marca inicial del sistema es una falla en el 50% de la línea L12 (i.e. una falla en la mitad de la línea que une el bus B1 con el bus B2).
Las primeras transiciones que ocurren son las que realizan el conteo del número de interruptores remotos en las líneas adyacentes de cada uno de los buses. Esto se lleva a cabo en la subred ‘Terminal Protección’ y es simplemente un conteo que podría ingresarse como parte de la información inicial, pero se realizó automático para evitar tener que ingresar más datos cuando se cambia el sistema de transmisión a simular. Este conteo se tarda 22 pasos o transiciones (el mismo número de interruptores del sistema).
La generación automática de fallas ha sido desactivada para evitar que aparezcan nuevas fallas. En una simulación normal estas serían las siguientes transiciones a realizar: 11

Redes Inteligentes en la Protección de los Sistemas de Potencia
42
transiciones para determinar si ocurre alguna falla en cualquiera de las 11 líneas de transmisión. Hasta este punto todo transcurre durante la unidad de tiempo 0. Una vez finalizadas estas transiciones el tiempo avanza una unidad, lo que habilita la siguiente serie de transiciones.
La transición que queda habilitada es DETECCION ANOMALIA en el agente ‘Relé’ ya que una falla ha sido plantada como condición inicial del modelo. Esta transición se ejecuta 44 veces (el mismo número de relés de todo el sistema) para comparar cada relé con la falla ocurrida y determinar cuáles de estos detectan la falla. Estas transiciones generan 28 mensajes al TP: 2 mensajes a los Terminales de Protección TP12, T21, TP14, TP41, TP15, TP51, TP23, TP32, TP24, TP 42, TP25, TP52, TP26 y TP62; un mensaje correspondiente al relé de distancia y el otro al relé de dirección. Entre estos mensajes hay 6 reportes de fallas externas y 8 de internas (información contenida en los mensajes de los relés de dirección) y 6 reportes de fallas de zona 3 y 8 de zona 1 (información contenida en los mensajes de los relés de distancia). Estas transiciones dejan también como resultado, 14 fichas en el lugar RETARDO POR ZONAS, las correspondientes a los relés de distancia.
La siguiente transición habilitada es MSJ DE RELE RECIBIDO en la subred ‘Terminal Protección’ debido a que se han recibido los 28 mensajes enviados. Estos mensajes pasan a través del lugar MSJS RECIBIDOS y la transición ANOMALIA DETECTADA hasta el lugar MSJ A CONTROL LOCAL 3. Estos mensajes son recibidos en el lugar MSJ DE TERMINAL PROTECCION en la subred ‘Control Local’, pasan por la transición MSJ DE TP RECIBIDO, por el lugar MSJS RECIBIDOS, por la transición OCURRE EVENTO y llegan hasta el lugar MSJs RELES DIST Y DIR. En este lugar son combinados por parejas como se mencionó y resultan 14 mensajes que se depositan en el lugar MSJ A CONTROL CENTRAL. Estos mensajes tienen la información de la zona de la falla reportada, la referencia del TP que la envió y el tipo de falla detectada (interna o externa). Con estos mensajes en el lugar MSJ DE CONTROL LOCAL en la subred del ‘Control Central’, se sigue el proceso. Los 14 mensajes pasan por la transición MSJ RECIBIDO y llegan a los 3 buzones (BUZON 1, BUZON 2 y BUZON 3). Las fallas que son externas pasan el filtro de la transición FALLA EXTERNA IDENTIFICADA y son enviadas como mensajes de bloqueo al lugar MSJ A CONTROL LOCAL. Estos mensajes bloquearán los interruptores CB14, CB15, CB23, CB24, CB25 y CB26 los cuales no deben operar (ver Figura 17). Las fallas que son internas pasan el filtro de la transición FALLA INTERNA IDENTIFICADA y llegan al lugar FALLA INTERNA. Por medio de la transición FALLA DE LINEA IDENTIFICADA se identifica una falla en la línea L12 (dos mensajes son tomados del lugar de entrada y una ficha aparece en el lugar de salida de la transición) que pasa al lugar LINEA CON FALLA DETECTADA. Por el momento no se habilitan más transiciones en la subred ‘Control Central’.
La transición que se habilita es ahora MSJ DE CC RECIBIDO en la subred ‘Control Local’ y corresponde a los mensajes de bloqueo anteriormente enviados. Estos mensajes de bloqueo pasan por el lugar MSJS RECIBIDOS, por la transición EJECUTAR BLOQUEO y se envían como mensajes al lugar MSJ A TERMINAL PROTECION. Se habilita entonces la transición MSJ DE CL RECIBIDO en la subred ‘Terminal Protección’. Los 6 mensajes recibidos pasan por el lugar MSJS RECIBIDOS, por la transición EJECUTAR BLOQUEO y son enviados como mensajes al lugar MSJ A BLOQUEO 1. Estos mensajes son recibidos en el lugar MSJ DE TP en la subred ‘Bloqueo CB’ y habilitan la transición BLOQUEAR CB. Esto genera el bloqueo de los 6 interruptores que no deben operar por la falla en la línea L12 que se mencionaron con anterioridad. El bloqueo de estos interruptores, habilita la transición CB SE DESHABILITA POR BLOQUEO en la subred ‘Habilitación CB’. Los 6 interruptores son deshabilitados. Al finalizar estas transiciones el

Redes Inteligentes en la Protección de los Sistemas de Potencia
43
tiempo incrementa en una unidad. Las siguientes acciones se ejecutan con el tiempo igual a 2 unidades.
Figura 17. Diagrama esquemático del sistema de prueba de 6 nodos, 11 líneas y 22 interruptores.
La transición que se habilita ahora es EJECUTAR DISPARO en la subred ‘Relé’. Las 8 fichas de los relés que detectaron fallas de zona 1 pasan al lugar CB OPERANDO y se envían 8 mensajes (a través del lugar MSJ A TP 2) a los respectivos TP con la orden de abrir los interruptores CB12, CB14, CB15, CB21, CB23, CB24, CB25, CB26 que son todos los interruptores de los buses B1 y B2 (ver Figura 17). Estos mensajes son recibidos en la subred ‘Terminal Protección’ por el lugar MSJ DE RELE. Los 8 mensajes pasan por la transición MSJ DE RELE RECIBIDO, por el lugar MSJS RECIBIDOS y habilitan la transición EJECUTAR DISPARO. Al ejecutarse esta transición, 8 mensajes son enviados a los respectivos ‘CB’ para que sean abiertos y las 8 fichas pasan al lugar CB OPERANDO. Los mensajes son recibidos en ‘CB’ y se habilitan dos transiciones. Una es ORDEN DE ABRIR CB DESHAB y se habilita debido a que hay 6 mensajes para abrir interruptores que están deshabilitados (los 6 que fueron bloqueados anteriormente). Esta transición ocurre 6 veces y se descartan estos mensajes sin repercusión alguna. Los 2 mensajes restantes habilitan la transición ABRIR CB (orden de abrir los interruptores CB12 y CB21). Existen dos posibilidades para estos mensajes, que pasen al lugar CB ABIERTO o que pasen al lugar CB FALLA (CERRADO). Las opciones son decididas por la probabilidad de que una falla ocurra al operar un interruptor. La probabilidad de falla está predeterminada en el modelo y es del 10%. Para mostrar los dos casos se obligó a que un interruptor se abriera (CB21) y el otro fallara (CB12).
Estos eventos habilitaron dos transiciones en la subred ‘Habilitación CB’. La primera es CB SE DESHABILITA POR FALLA, la cual deshabilita al interruptor CB12, y la segunda es CB SE DESHABILITA POR APERTURA que deshabilita al interruptor CB21. Finalizando estas transiciones el tiempo pasa a su tercera unidad. Este avance de tiempo habilita 3 transiciones en la subred ‘Terminal Protección’: CB SE ABRE, CB NO SE ABRE Y DEBIA OPERAR y CB NO SE ABRE Y NO DEBIA OPERAR.

Redes Inteligentes en la Protección de los Sistemas de Potencia
44
La transición CB SE ABRE envía un mensaje al ‘Control Local’ por cada interruptor que fue abierto, es decir, un sólo mensaje debido al CB21. La transición CB NO SEABRE Y NO DEBIA OPERAR envía un mensaje de desbloqueo a ‘Bloqueo CB’ por cada interruptor bloqueado que se intentó abrir y finalmente la transición CB NO SE ABRE Y DEBIA OPERAR envía un mensaje a ‘Control Local’ por cada interruptor que se intentó abrir pero falló en su intento. Además, esta última transición envía una ficha al lugar CB REQUIERE RESPALDO por cada interruptor que falló en su apertura con el número de interruptores que sirven como respaldo del que ha fallado. Esta ficha habilita la transición CB DE APOYO IDENTIFICADO, la cual ocurre un número de veces igual al número de interruptores de apoyo requeridos. Cada vez que la transición ocurre se envía un mensaje a ‘Relé’ para habilitar la operación por respaldo de estos interruptores identificados. En este caso, debido a que el interruptor CB12 falló se requieren 2 interruptores de respaldo: CB41 y CB51, por lo tanto se envían dos mensajes a ‘Relé’. Estos dos mensajes se reciben en el lugar MSJ A RELE de la subred ‘Relé’ y pasan por la transición ACTUALIZACIÓN hasta el lugar HAB CBs RESPALDO donde esperan hasta ser utilizados.
Por otra parte, los dos mensajes enviados a ‘Control Local’ se reciben en el lugar MSJ DE TERMINAL PROTECCION. Se tiene un mensaje de reporte de falla del interruptor CB12 y un mensaje de reporte de apertura del interruptor CB21. Estos pasan por la transición MSJ DE TP RECIBIDO, el lugar MSJS RECIBIDOS, la transición OCURRE EVENTO y llegan como mensajes al lugar MSJ A CONTROL CENTRAL. En ‘Control Central’ los recibe el lugar MSJ DE CONTROL LOCAL y circulan hasta el lugar CBAs CBFs. En esta subred se tiene también una ficha en el lugar LINEA CON FALLA DETECTADA. Estas fichas activan en conjunto dos transiciones: la primera es PRIMER CB OPERA la cual genera una ficha en el lugar PRIMER CONDICION CUMPLIDA, la segunda es SEGUNDO CB FALLA que al ocurrir genera una ficha en el lugar CBs DE RESPALDO DEL 2DO CB. Esta ficha pasa con un contador en cero cuyo propósito es contar el número de interruptores de respaldo del interruptor CB12 que se van abriendo (debido a que falló en su operación), por lo tanto debe esperar hasta que esto ocurra. Finalizando esta transición el tiempo cambia a la unidad 4.
Siguiendo el proceso, la transición EJECUTAR DISPARO es habilitada en la subred ‘Relé’. En esta subred faltan aún por procesar 6 relés que detectaron una falla en la zona 3 (es decir, de respaldo). Estas fichas pasan al lugar EVALUAR NECESIDAD DISPARO y de nuevo el tiempo avanza esta vez a la unidad 5.
La transición que se habilita es DESBLOQUEAR CB de la subred ‘Bloqueo CB’ debido a 6 mensajes de desbloqueo (para aquellos interruptores que fueron intentados abrir estando bloqueados) que se habían enviado desde ‘Terminal Protección’ momentos atrás. Los 6 interruptores son desbloqueados tal y como fueron bloqueados anteriormente para evitar su operación indebida. Debido a este desbloqueo, los interruptores se habilitan en la subred ‘Habilitación CB’. Estos interruptores habilitados ya pueden terminar su ciclo en la subred ‘Relé’ y pasan a través de la transición RELE LISTO que se encuentra habilitada, hasta el lugar inicial ESPERA (pasan 6 fichas y son devueltos a su lugar inicial los 12 relés correspondientes a estos 6 interruptores–6 relés de distancia y 6 relés de dirección). Con estas transiciones el tiempo avanza hasta la unidad 6.
En esta nueva unidad de tiempo la transición habilitada es SE REQUIERE CB DE RESPALDO en la subred ‘Relé’. Los 6 interruptores que estaban esperando en EVALUAR NECESIDAD DISPARO pasan ahora por esta transición. Aquellos que no están habilitados para operar por respaldo (CB32, CB42, CB52 y CB62) simplemente pasan al lugar inicial ESPERA (dos relés por cada interruptor, uno de distancia y uno de dirección) y se envía un mensaje de desbloqueo al

Redes Inteligentes en la Protección de los Sistemas de Potencia
45
respectivo TP de manera preventiva para evitar que queden bloqueados. Los demás, es decir los CB que si están habilitados para operar por respaldo (CB41 y CB51), pasan al lugar CB OPERANDO y envían un mensaje a TP ordenando la apertura de los mismos. Estos mensajes llegan a ‘Terminal Protección’ y pasan por la transición EJECUTAR DISPARO lo que genera dos mensajes de apertura para la subred ‘CB’ y dos fichas para el lugar CB OPERANDO. Los interruptores CB41 y CB51 se abren exitosamente (aunque también existe la probabilidad de que fallen al abrir lo que llevaría al fracaso del sistema de protección, por lo menos en el modelo, debido a que la falla no sería despejada) y son deshabilitados en ‘Habilitación CB’. Con estos pasos el tiempo avanza hasta 7 unidades.
Al avanzar, la transición que se habilita es CB SE ABRE en la subred ‘Terminal Protección’. Los dos interruptores que ya operaron envían cada uno un mensaje a ‘Control Local’ reportando su apertura. Estos dos mensajes pasan por ‘Control Local’ hasta llegar a ‘Control Central’ al lugar MSJ DE CONTROL LOCAL. De allí circulan hasta el lugar CBAs CBFs donde habilitan la transición COMPARACION RESPALDO 2DO CB. Estos dos interruptores completan el conteo de CBs de respaldo del interruptor que falló (CB12), por lo que pasa una ficha al lugar SEGUNDA CONDICION CUMPLIDA. Con este evento se cumplen entonces las dos condiciones necesarias para que la transición FALLA DE LINEA DESPEJADA ocurra (pues se completaron las acciones necesarias para despejar la falla de la línea L12) y pasa una ficha al lugar FALLA DE LINEA DESPEJADA con los números (1,2) indicando que una falla fue despejada de esta línea.
Con esta transición finalizan todas las transiciones (debido a que la transición generadora de fallas de la subred ‘Línea Transmisión’ está deshabilitada). Esto quiere decir que la simulación ha terminado al transcurrir 411 transiciones y 8 unidades de tiempo. El estado final es fácilmente observable en las subredes ‘CB’ y ‘Control Central’. En ‘CB’ se pueden ver 3 interruptores abiertos (CB21, CB41, CB51) y uno en falla (CB12) y en ‘Control Central’ se puede ver que hay una falla en la línea L12 y una falla despejada en la línea L12.
Con esto se termina la descripción del modelo. En la siguiente sección se procede a realizar la simulación del modelo repetidas veces para evaluar su comportamiento y verificar su validez en todos los posibles casos.
9. VALID ACI ÓN DEL DISE ÑO
En esta sección se realiza la validación del modelo presentado para verificar que los resultados arrojados por el mismo sean correctos y estén acordes con los resultados esperados y el diseño propuesto. Se presenta brevemente la metodología de pruebas propuesta y los resultados obtenidos de las simulaciones junto con el análisis de las mismas.
9.1. Metodología de Prueba
La metodología de prueba para el modelo es bastante sencilla. Se realizarán cuatro pruebas básicas. En las primeras 3 pruebas se desactivará la transición generadora de fallas aleatorias para evaluar el modelo ante una única falla. La primera consiste en poner como condición inicial una falla en la línea L12 al 50% de la misma (es decir en la mitad de la línea de transmisión). Bajo estas condiciones se realizarán 60 simulaciones del modelo para ver la forma en que se desenvuelve el modelo del SPI. En la segunda prueba se pondrá como condición inicial una falla en el 5% de la línea L12 (es decir cerca al bus B1) y se realizarán las mismas 60 simulaciones. Como tercera prueba la falla se pondrá en el 95% de la línea L12 (cerca al bus B2) y se realizará el mismo número de simulaciones. Finalmente, como cuarta prueba se activará la

Redes Inteligentes en la Protección de los Sistemas de Potencia
46
transición generadora de fallas aleatorias y se correrán 20 simulaciones para observar el comportamiento del modelo.
9.2. Validación de los Resultados del Diseño
En esta sección se presentarán los resultados de las pruebas realizadas y se analizaran los resultados obtenidos para validar el modelo del SPI.
9.2.1. Primera prueba: Falla en 50% de línea L12
En esta primera prueba se tuvo como parte de las condiciones iniciales una falla en el 50% de la línea L12 (entre los buses 1 y 2), es decir en la mitad de la misma. La transición generadora de fallas aleatorias se deshabilitó para evitar la aparición de más fallas durante la simulación y poder observar el comportamiento del modelo en presencia de una sola falla. Se realizaron un total de 60 simulaciones bajo estas mismas condiciones. El resumen de los resultados de esta prueba se muestra en la Tabla 4.
En los resultados se observaron simulaciones de alrededor de 400 transiciones y 6 unidades de tiempo. En el 85% de las simulaciones se presentó el caso normal. Este caso sería el esperado en el momento en que una falla de línea ocurriera y todo el sistema y los dispositivos de protección funcionaran correctamente. Los dos interruptores (CB12 y CB21) de los extremos de la línea en falla operan, es decir se abren, y despejan la falla oportunamente. El SPI funciona apropiadamente debido a que en el agente Control Central se observa que la falla de línea ha sido identificada y despejada.
En las demás simulaciones se presentaron casos menos probables pero igualmente posibles que demuestran la efectividad del SPI y la validez del modelo realizado. El siguiente caso con mayor frecuencia (5%) fue en el que 3 interruptores se abrieron. En este caso el interruptor CB12 falló en su operación y sus interruptores de respaldo (CB41 y CB51) tuvieron que operar. Si se observa la Figura 17 es posible identificar fácilmente que al operar CB21, CB41 y CB51 la línea L12 queda desconectada del sistema y por lo tanto la falla es despejada. Un caso similar a este es el sexto de la tabla. En este caso el CB que falla es el CB21 y sus interruptores de respaldo son operados (CB32, CB42, CB52 y CB62) de manera que la falla es despejada. Un caso particular que es poco probable en un sistema real es el quinto de la tabla. En este caso ambos interruptores (CB12 y CB21) fallan lo que hace que los interruptores de respaldo de ambos operen. En este caso un total de 7 líneas son salen de servicio lo cual sería bastante caótico para una red de transmisión. Debido a este tipo de posibilidades (que en realidad son mínimas) es que se utilizan sistemas de protección altamente redundantes, es decir que en casos como este sería bastante apropiado tener dos interruptores en serie para respaldarse mutuamente.
Se presentaron también una serie de casos en los que uno de los dos interruptores que deberían operar inicialmente (CB12 y CB21) falló y adicionalmente uno de los interruptores de respaldo del anterior también falló. Esta situación es también poco probable en un sistema real debido a las bajas probabilidades de falla de estos dispositivos, sin embargo es claro según los resultados que en estos casos la falla es identificada pero no despejada. Esto se debe a que en el modelo la protección de respaldo es el último recurso de protección. Si falla la protección de respaldo, el sistema queda vulnerado y la falla permanece hasta que el primer componente sometido a la falla abra el circuito. Este tipo de casos ocurren debido a la limitada capacidad de representación del modelo en cuanto a la infinidad de funciones de protección que podrían ser implementadas sobre la plataforma del SPI.
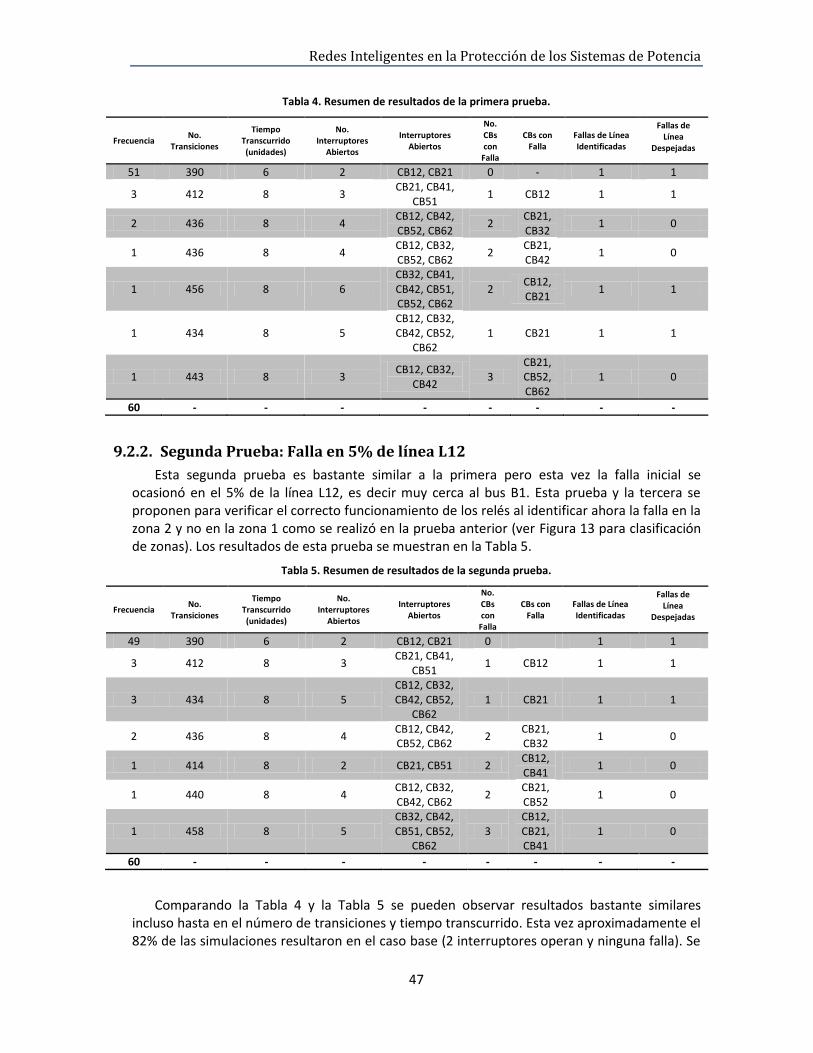
Redes Inteligentes en la Protección de los Sistemas de Potencia
47
Tabla 4. Resumen de resultados de la primera prueba.
Frecuencia No.
Transiciones
Tiempo Transcurrido (unidades)
No. Interruptores
Abiertos
Interruptores Abiertos
No. CBs con
Falla
CBs con Falla
Fallas de Línea Identificadas
Fallas de Línea
Despejadas
51 390 6 2 CB12, CB21 0 - 1 1
3 412 8 3 CB21, CB41,
CB51 1 CB12 1 1
2 436 8 4 CB12, CB42, CB52, CB62
2 CB21, CB32
1 0
1 436 8 4 CB12, CB32, CB52, CB62
2 CB21, CB42
1 0
1 456 8 6 CB32, CB41, CB42, CB51, CB52, CB62
2 CB12, CB21
1 1
1 434 8 5 CB12, CB32, CB42, CB52,
CB62 1 CB21 1 1
1 443 8 3 CB12, CB32,
CB42 3
CB21, CB52, CB62
1 0
60 - - - - - - - -
9.2.2. Segunda Prueba: Falla en 5% de línea L12
Esta segunda prueba es bastante similar a la primera pero esta vez la falla inicial se ocasionó en el 5% de la línea L12, es decir muy cerca al bus B1. Esta prueba y la tercera se proponen para verificar el correcto funcionamiento de los relés al identificar ahora la falla en la zona 2 y no en la zona 1 como se realizó en la prueba anterior (ver Figura 13 para clasificación de zonas). Los resultados de esta prueba se muestran en la Tabla 5.
Tabla 5. Resumen de resultados de la segunda prueba.
Frecuencia No.
Transiciones
Tiempo Transcurrido (unidades)
No. Interruptores
Abiertos
Interruptores Abiertos
No. CBs con
Falla
CBs con Falla
Fallas de Línea Identificadas
Fallas de Línea
Despejadas
49 390 6 2 CB12, CB21 0 1 1
3 412 8 3 CB21, CB41,
CB51 1 CB12 1 1
3 434 8 5 CB12, CB32, CB42, CB52,
CB62 1 CB21 1 1
2 436 8 4 CB12, CB42, CB52, CB62
2 CB21, CB32
1 0
1 414 8 2 CB21, CB51 2 CB12, CB41
1 0
1 440 8 4 CB12, CB32, CB42, CB62
2 CB21, CB52
1 0
1 458 8 5 CB32, CB42, CB51, CB52,
CB62 3
CB12, CB21, CB41
1 0
60 - - - - - - - -
Comparando la Tabla 4 y la Tabla 5 se pueden observar resultados bastante similares incluso hasta en el número de transiciones y tiempo transcurrido. Esta vez aproximadamente el 82% de las simulaciones resultaron en el caso base (2 interruptores operan y ninguna falla). Se

Redes Inteligentes en la Protección de los Sistemas de Potencia
48
presentan igualmente los dos casos en los que uno de los interruptores de la línea con falla no opera y sus interruptores de respaldo se encargan de despejar la falla. De manera similar se presentan casos en los cuales falla más de un interruptor y la falla no es despejada. Estos casos comienzan a revelar la más clara debilidad del modelo desarrollado y son los limitados recursos de protección. El modelo fue desarrollado para que el sistema tenga únicamente dos barreras de protección, una primaria y una de respaldo. En el momento en que la protección de respaldo falla, el SPI no puede despejar la falla, lo que probablemente podría ocasionar el colapso del sistema de transmisión. Esta situación era de esperarse debido a que únicamente se ha implementado una función de protección sobre la plataforma desarrolladla, la función de protección que desempeñan los relés de distancia (junto con los relés de dirección).
9.2.3. Tercera Prueba: Falla en 95% de línea L12
Esta prueba termina de verificar el correcto funcionamiento del proceso de detección de fallas de los relés. Con esta prueba se asegura el hecho de que cualquier falla de línea pueda ser detectada por los relés. Los resultados de esta prueba se muestran en la Tabla 6.
Observando los resultados en la Tabla 6 se evidencian resultados similares a los presentados en las dos pruebas anteriores. Confirma el hecho de que los relés pueden detectar fallas en la zona 2 pero no aporta mucha más información nueva. El único cambio importante es el tiempo transcurrido que aumentó a 12 aproximadamente. Este cambio se debe a que los procesos que se llevan a cabo en el modelo hacen que las fallas en los extremos superiores de las líneas (altos porcentajes sin importar el orden de los buses, i.e. falla en 95% de L12 o falla en el 95% de línea L21) tarden un poco más en ser despejadas (en unidades de tiempo más no en número de transiciones).
Esta vez el caso base ocurre en el 79% de las simulaciones y los casos restantes son los mismos que se describieron en las anteriores pruebas. De nuevo aparecen casos en los cuales falla más de un interruptor y la falla no puede ser despejada.
Tabla 6. Resumen de resultados de la tercera prueba.
Frecuencia No.
Transiciones
Tiempo Transcurrido (unidades)
No. Interruptores
Abiertos
Interruptores Abiertos
No. CBs con
Falla
CBs con Falla
Fallas de Línea Identificadas
Fallas de Línea
Despejadas
47 390 12 2 CB12. CB21 0 1 1
6 412 14 3 CB21, CB41,
CB51 1 CB12 1 1
4 434 14 5 CB12, CB32, CB42, CB52,
CB62 1 CB21 1 1
1 439 14 3 CB12, CB52,
CB62 3
CB21, CB32, CB42
1 0
1 440 14 4 CB12, CB32, CB42, CB62
2 CB21, CB52
1 0
1 418 14 2 CB21, CB41 2 CB12, CB51
1 0
60 - - - - - - - -
9.2.4. Cuarta Prueba: Fallas generadas aleatoriamente
Esta última prueba es diferente de las anteriores. Para esta prueba se habilitó la transición que genera las fallas aleatorias (en la subred ‘Línea Transmisión’) y no hay ninguna falla como

Redes Inteligentes en la Protección de los Sistemas de Potencia
49
condición inicial. Debido a este cambio, el modelo no tiene un límite de transiciones que pueda realizar ya que siempre hay la posibilidad de que una nueva falla aparezca. Debido a esto se decidió correr el modelo un número fijo de transiciones que se estableció en 1000 después de realizar varios intentos. Con este número de transiciones se obtiene en la mayoría de las simulaciones por lo menos una falla. En los casos en que no ocurre ninguna falla en estas primeras mil transiciones, se corren otras mil y se procede de esta forma hasta que por lo menos una falla ocurra. En algunos casos ocurrió una falla al final de la simulación, lo que le impedía al modelo reaccionar ante la falla. Para estos casos se corrieron algunas transiciones más para que el modelo pudiera realizar las debidas acciones. Los resultados se presentan en la Tabla 7 y la Tabla 8.
Tabla 7. Resumen de resultados de la cuarta prueba.
No. Falla(s) No.
Transiciones
Tiempo Transcurrido (unidades)
No. Interruptores
Abiertos Interruptores Abiertos
No. CBs con Falla
CBs con Falla
FLI FLD
1 L26 96% 3000 240 2 CB26, CB62 0 1 1 2 L45 61% 1000 60 2 CB45, CB54 0 1 1 3 L36 57% 1000 65 3 CB23, CB53, CB63 1 CB36 1 1 4 L35 20% 1000 60 2 CB35, CB53 0 1 1 5 L15 33% 1000 57 2 CB15, CB51 0 1 1
6 L14 78% L35 68%
3010 226 4 CB14, CB41, CB35, CB53 0 2 2
7 L25 94% 1000 49 2 CB25, CB52 0 1 1 8 L14 30% 5000 429 2 CB14, CB41 0 1 1 9 L25 47% 1000 50 2 CB25, CB52 0 1 1
10
L36 98% L45 46% L56 92% L14 97%
2380 147 6 CB14, CB36, CB41, CB45,
CB54, CB63 0 3 3
11 L24 44% 1000 57 2 CB24, CB42 0 1 1 12 L24 57% 1000 79 2 CB24, CB42 0 1 1
13 L26 42% L56 84%
3000 221 2 CB56, CB65 0 2 1
14 L23 12% 3000 241 5 CB12, CB32, CB42, CB52,
CB62 1 CB23 1 1
15 L45 86% 2000 149 2 CB45, CB54 0 1 1 16 L24 100% 1000 55 3 CB14, CB24, CB54 1 CB42 1 1
17
L12 7% L25 32% L26 27% L45 9%
3000 167 7 CB12, CB21, CB25, CB26,
CB45, CB52, CB62 0 4 3
18 L45 78% 1000 58 2 CB45, CB54 0 1 1 19 L56 98% 1000 59 2 CB56, CB65 0 1 1
20 L26 6%
L36 31% 4000 316 10
CB12, CB63, CB42, CB36, CB52, CB53, CB62, CB24,
CB35, CB45 2
CB26, CB32
2 1
Esta última prueba muestra la capacidad que tiene el modelo de imitar las acciones del SPI para cualquier falla de línea que ocurra. Estos resultados son interesantes si se analizan por el número de fallas que ocurre en cada una de las simulaciones. Observando la Tabla 8, se puede identificar un patrón que revela los límites de la capacidad del modelo para despejar las fallas. El SPI propuesto debe reaccionar inteligentemente ante cada una de las fallas que ocurran sin importar que estas se acumulen. El modelo por el contrario parece que pierde su habilidad para despejar las fallas cuando estas ocurren en mayor número. Al ocurrir una única falla
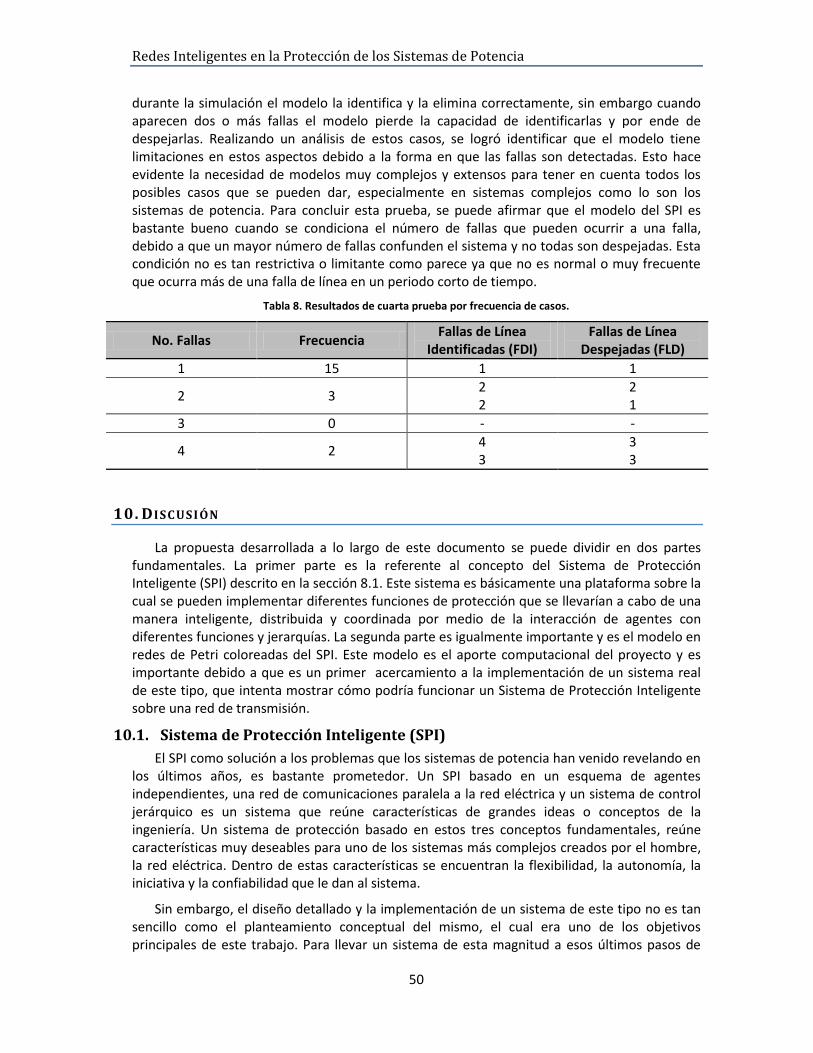
Redes Inteligentes en la Protección de los Sistemas de Potencia
50
durante la simulación el modelo la identifica y la elimina correctamente, sin embargo cuando aparecen dos o más fallas el modelo pierde la capacidad de identificarlas y por ende de despejarlas. Realizando un análisis de estos casos, se logró identificar que el modelo tiene limitaciones en estos aspectos debido a la forma en que las fallas son detectadas. Esto hace evidente la necesidad de modelos muy complejos y extensos para tener en cuenta todos los posibles casos que se pueden dar, especialmente en sistemas complejos como lo son los sistemas de potencia. Para concluir esta prueba, se puede afirmar que el modelo del SPI es bastante bueno cuando se condiciona el número de fallas que pueden ocurrir a una falla, debido a que un mayor número de fallas confunden el sistema y no todas son despejadas. Esta condición no es tan restrictiva o limitante como parece ya que no es normal o muy frecuente que ocurra más de una falla de línea en un periodo corto de tiempo.
Tabla 8. Resultados de cuarta prueba por frecuencia de casos.
No. Fallas Frecuencia Fallas de Línea
Identificadas (FDI) Fallas de Línea
Despejadas (FLD)
1 15 1 1
2 3 2 2 2 1
3 0 - -
4 2 4 3 3 3
10. DISCUSI ÓN
La propuesta desarrollada a lo largo de este documento se puede dividir en dos partes fundamentales. La primer parte es la referente al concepto del Sistema de Protección Inteligente (SPI) descrito en la sección 8.1. Este sistema es básicamente una plataforma sobre la cual se pueden implementar diferentes funciones de protección que se llevarían a cabo de una manera inteligente, distribuida y coordinada por medio de la interacción de agentes con diferentes funciones y jerarquías. La segunda parte es igualmente importante y es el modelo en redes de Petri coloreadas del SPI. Este modelo es el aporte computacional del proyecto y es importante debido a que es un primer acercamiento a la implementación de un sistema real de este tipo, que intenta mostrar cómo podría funcionar un Sistema de Protección Inteligente sobre una red de transmisión.
10.1. Sistema de Protección Inteligente (SPI)
El SPI como solución a los problemas que los sistemas de potencia han venido revelando en los últimos años, es bastante prometedor. Un SPI basado en un esquema de agentes independientes, una red de comunicaciones paralela a la red eléctrica y un sistema de control jerárquico es un sistema que reúne características de grandes ideas o conceptos de la ingeniería. Un sistema de protección basado en estos tres conceptos fundamentales, reúne características muy deseables para uno de los sistemas más complejos creados por el hombre, la red eléctrica. Dentro de estas características se encuentran la flexibilidad, la autonomía, la iniciativa y la confiabilidad que le dan al sistema.
Sin embargo, el diseño detallado y la implementación de un sistema de este tipo no es tan sencillo como el planteamiento conceptual del mismo, el cual era uno de los objetivos principales de este trabajo. Para llevar un sistema de esta magnitud a esos últimos pasos de

Redes Inteligentes en la Protección de los Sistemas de Potencia
51
diseño, se requieren condiciones exigentes que no deben ser tomadas a la ligera. Uno de los requisitos fundamentales es la infraestructura de comunicaciones y la estandarización de los protocolos de comunicación. Este tipo de barreras son en ocasiones las más difíciles de romper y por lo tanto retrasan a la tecnología que va siempre varios pasos adelante. Es por esto que son necesarios estándares como el IEC61850 de automatización de subestaciones que determinen en detalle una forma estándar de interconectar y comunicar dispositivos eléctricos de cualquier índole y fabricante.
La red de comunicaciones que sea utilizada para este tipo de sistemas SPI debe ser altamente confiable y debe tener un desempeño sobresaliente. El diseño conceptual del SPI cuenta con que la red de comunicaciones sea un sistema prácticamente infalible, pues es extremadamente dependiente de la misma. Los sistemas de comunicaciones seguirán siendo entonces el cuello de botella de los sistemas basados en la información y por lo tanto un SPI será tan bueno como su red de comunicaciones se lo permita. Sin embargo, es importante tener en cuenta que el SPI debe tener o desarrollar una capacidad de tolerar fallas de comunicaciones. Para esto es viable pensar en brindarle redundancia a los sistemas de comunicaciones de alguna forma que sea económicamente viable y costo-efectiva.
Finalmente, para lograr un Sistema de Protección Inteligente que sea realmente inteligente y autónomo, es vital el uso de componentes y dispositivos que sean igualmente inteligentes y autónomos en cada uno de los niveles de jerarquía. Tal y como se propone en [4], todos los dispositivos del sistema, incluso desde el interruptor más pequeño, deben tener la capacidad de participar activamente en la red de computación distribuida propuesta por este trabajo. Esta es la mejor forma de darle todas las herramientas a un control central, para que coordine agentes inteligentes que no requieren de órdenes muy específicas, pero si de un ente central que busque permanentemente el bienestar o el mejor estado posible del sistema de potencia bajo unas condiciones dadas. Esta filosofía de control es la que permite tener un sistema de protección distribuida coordinado de manera centralizada, donde todos los agentes pueden tomar decisiones pero encaminados por un control central que busca optimizar la operación global del sistema.
10.2. Modelo del SPI
El modelo del Sistema de Protección Inteligente desarrollado en redes de Petri coloreadas, mostró un excelente desempeño bajo ciertas condiciones limitadas. El modelo representa de manera sencilla la idea del SPI como un sistema basado en agentes independientes con diferentes niveles de jerarquía de control que utilizan una red de comunicaciones para interactuar y lograr un objetivo común construido a partir de los objetivos de cada agente. Debido a las limitaciones que presenta la herramienta gráfica y matemática (las redes de Petri coloreadas), el modelo presenta igualmente limitaciones que impiden elaborar un sistema de mayor complejidad computacional.
Las limitaciones que presenta el modelo del SPI se pueden clasificar como de representación y de capacidad. Las limitaciones de representación aparecen debido a que sólo se pueden simular sistemas sencillos de transmisión: buses unidos por líneas de transmisión únicas. Para aumentar la capacidad de representación del modelo la complejidad del mismo aumentaba considerablemente, complejidad que requeriría un mayor tiempo de desarrollo. En cuanto a las limitaciones de capacidad, estas aparecen de diversas formas. La más evidente limitación de capacidad es la impuesta por el número de fallas que el modelo puede despejar en una misma simulación. El modelo cumple el objetivo a la perfección cuando se genera una única falla de línea en el sistema de transmisión, sin embargo cuando el número de fallas

Redes Inteligentes en la Protección de los Sistemas de Potencia
52
comienzan a aumentar el desempeño del modelo no es tan bueno. En la Tabla 8 es bastante evidente este hecho. Con una falla ocurrida en la simulación, esta es identificada y despejada. Con más de una falla es frecuente que el modelo no identifique todas las fallas o que no despeje todas las fallas identificadas.
Otra limitación de capacidad se hace evidente al analizar de fondo el modelo. Las redes de Petri, incluso las coloreadas, son bastante flexibles para representar modelos en diferentes estados, sin embargo es difícil realizar cálculos medianamente complicados por medio de lugares, transiciones y arcos. Para realizar funciones de computación más elaboradas como las que requiere un sistema sofisticado de identificación de fallas, se hace necesario el uso de herramientas de programación más poderosas. El software CPN Tools© utilizado para desarrollar el modelo, permite programar por código en las inscripciones de los elementos de las redes de Petri. Sin embargo, debido a la falta de soporte del lenguaje que este utiliza comparado con la diversidad de funciones ya implementadas en lenguajes como el de MATLAB, el software utilizado y el modelo desarrollado pierde valor. Modelos igualmente complejos (con la desventaja de que no serían tan gráficos) podrían ser implementados en MATLAB fácilmente. Incluso se podría desarrollar un modelo del SPI que, sin ser tan complejo, sería mucho más funcional, práctico y extensible que el presentado en esta propuesta. Esto sin embargo nunca fue el objetivo del trabajo, parte del objetivo del proyecto fue utilizar las redes de Petri para desarrollar el modelo del SPI.
Como trabajo futuro se sugiere continuar con la construcción del modelo. Algunas mejoras que se podrían realizar al modelo son:
Desarrollar un sistema de comunicaciones completo, por el cual deben circular todos los mensajes entre los diferentes agentes. Este sistema de comunicaciones puede incluir probabilidades de pérdida de mensajes, mensajes de confirmación de recibo, manejo de tiempos de retardo, entre otros.
Mejorar la función implementada de identificación y aislamiento de fallas de línea. Para comenzar esto se podría mejorar el agente ‘Control Central’ para que tenga un mecanismo más sofisticado de identificación y aislamiento de fallas que soporte varias fallas en una misma simulación.
Implementar la función de recierre de interruptores. Esta función se podría implementar en el modelo del SPI introduciendo otro agente de nivel de campo que determine el momento en que la falla ha desaparecido y enviando un reporte indicando que interruptores pueden reconectarse.
Implementar diversas funciones de protección realizadas por diferentes tipos de relés que existen en la actualidad.
11. CON CL USIONES
Un Sistema de Protección Inteligente es según muchos autores, la opción más acertada para lograr en un futuro, un sistema de potencia integrado y controlable [1][2][4][5]. Muchos autores lo llaman de diversas formas, pero al final es siempre una Red Inteligente, mejor conocida como Smart Grid, que permitirá tener bajo un control prácticamente completo los sistemas de potencia, en especial los sistemas de transmisión que son su columna vertebral.
Un SPI basado en un esquema de múltiples agentes independientes, reactivos, pro-activos y con habilidades sociales (de comunicación), que cuente con una red de comunicaciones de alto desempeño paralela al sistema de potencia a la cual cada dispositivo tenga acceso, y con un

Redes Inteligentes en la Protección de los Sistemas de Potencia
53
sistema de control jerárquico que dé lugar a un sistema de computación distribuido coordinado centralmente; tiene todas las herramientas para ser un sistema flexible, extensible, confiable y autónomo, capaz de controlar el sistema de ingeniería más complejo creado por el hombre, la red eléctrica.
Adicionalmente, unidades de procesamiento integradas en cada dispositivo de un sistema de protección, soportadas por un sistema de comunicación de alto desempeño, son vitales para la implementación del Sistema de Protección Inteligente. En un sistema de reconocida complejidad, como lo es la red eléctrica, donde problemas de cualquier índole y a cualquier nivel pueden aparecer, se hace necesaria la existencia de dispositivos con capacidad de procesamiento y de iniciativa. Estos deben lograr comunicarse con otros agentes prestadores de servicios para resolver autónomamente sus problemas y lograr sus objetivos dentro de un entorno dinámico que se debe tener en cuenta.
El modelo del SPI desarrollado en redes de Petri coloreadas es un primer acercamiento a la implementación real de una red inteligente. Aunque es aún un modelo simple si se compara con todo lo que implica el SPI propuesto, es un modelo que permite ilustrar la plataforma que se propone (sobre la cual se podrían implementar un sinnúmero de funciones de protección). El modelo evidencia como varios agentes, pueden comunicarse y cooperar para lograr un objetivo común, que en este caso es detectar y despejar las fallas de línea de una red de transmisión.
El modelo permite representar cualquier red sencilla de transmisión, sin necesidad de realizar cambios mayores en el mismo. Introduciendo una información inicial básica sobre los buses, líneas de transmisión e interruptores, es posible probar y simular el modelo del SPI sobre cualquier red de transmisión simple. Esto se puede lograr gracias a la extensibilidad y flexibilidad de representación que se le dio al modelo en su diseño. Por otra parte, las características gráficas del modelo, hacen que sea bastante legible (teniendo unos conocimientos básicos en RPC), lo que permite realizar el seguimiento detallado de cada uno de los eventos que ocurren en el sistema y así, ver la forma en que los agentes cooperan para lograr un objetivo.
Al igual que fortalezas, el modelo tiene algunas debilidades importantes. Son básicamente limitaciones que se pueden denominar de representación y de capacidad. De representación debido a que el modelo puede simular un SPI sobre un sistema muy simple de transmisión, limitado por una serie de buses unidos por líneas sencillas de transmisión. Esto implica que no se pueden diferenciar líneas sencillas de líneas dobles (circuitos paralelos), diferentes niveles de voltaje, transformadores, entre otros. Las limitaciones de capacidad son igualmente restrictivas. La más evidente limitación de capacidad es la impuesta por el número de fallas que el modelo puede despejar en una misma simulación. El modelo cumple el objetivo cuando se genera una única falla de línea en el sistema de transmisión, sin embargo cuando el número de fallas comienza a aumentar, el desempeño del modelo no es eficaz. Por otra parte, existe una limitación de capacidad que obedece a la reducida capacidad de cálculo que tiene el modelo, debido principalmente a la complejidad que representa procesar información en redes de Petri. El mismo modelo, e incluso uno mucho más completo, podría elaborarse (perdiendo toda representación gráfica) en un lenguaje de programación con mayor soporte de procesamiento de información (por ejemplo MATLAB).

Redes Inteligentes en la Protección de los Sistemas de Potencia
54
12. AG RADE CIMIE NTOS
Le doy mis más sinceros agradecimientos a mi asesor el Dr. Álvaro Torres Macías por darle dirección a este proyecto y por sus valiosos aportes a lo largo del semestre. Agradezco también a aquellos profesores del Departamento de Ingeniería Eléctrica y Electrónica de la Universidad de los Andes que me colaboraron en el desarrollo de este proyecto. Finalmente a mi familia por el apoyo incondicional que me brindaron.

Redes Inteligentes en la Protección de los Sistemas de Potencia
55
REFERENCIAS
[1] J. Giri, D. Sun, and R. Avila-Rosales, "Wanted: A More Intelligent Grid," IEEE Power & Energy Magazine, vol. 7, no. 2, pp. 34-40, Mar. 2009.
[2] Litos Strategic Communication, "The Smart Grid: An Introduction," U.S. Department of Energy.
[3] P. M. Anderson and B. K. LeReverend, "Industry Experience with Special Protection Schemes," IEEE Transactions on Power Systems, vol. 11, no. 3, pp. 1166-1179, 1996.
[4] S. Massoud Amin and B. F. Wollenberg, "Toward a Smart Grid," IEEE Power & Energy Magazine, vol. 3, no. 5, pp. 34-41, Sep. 2005.
[5] J. D. McDonald, "The Next Generation Grid: Energy Infrastructure of the Future," IEEE Power & Energy Magazine, vol. 7, no. 2, pp. 26-94, Mar. 2009.
[6] M. Begovic, D. Novosel, and M. Milisavljevic, "Trends in power system protection and control," Decision Support Systems, vol. 30, no. 3, pp. 269-278, 2001.
[7] M. Enns, et al., "Potential applications of expert systems to power system protection," IEEE Transactions on Power Delivery, vol. 9, no. 2, pp. 720-728, 1994.
[8] L. A. Kojovic, M. T. Bishop, and V. Skendzic, "Coiled for Protection," IEEE Power and Energy Magazine, vol. 1, no. 3, pp. 43-48, May 2003.
[9] P. Hines, J. Apt, and S. Talukdar, "Large blackouts in North America: Historical trends and policy implications," Energy Policy, vol. 37, no. 12, pp. 5249-5259, 2009.
[10] T. Xu, X. Yin, D. You, Y. Li, and Y. Wang, "A Novel Communication Network for Three-Level Wide Area Protection System," in IEEE Power and Energy Society General Meeting: Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, 2008, pp. 1-8.
[11] F. Wang and J. Tang, "Modeling of a Transmission Line Protection Relaying Scheme using Petri Nets," IEEE Transactions on Power Delivery, vol. 12, no. 3, pp. 1055-1063, Jul. 1997.
[12] J. Tang and F. Wang, "Modeling of a Transmission Network Protection System using Petri Nets," Electric Power Systems Research, vol. 44, no. 3, pp. 175-181, Mar. 1998.
[13] W. Cong, Z. C. Pan, J. G. Zhao, and J. Zhan, "A Wide Area Protection System and Division of Protection IED Associated Area Based on Petri Net," in IEEE/PES Transmission and Distribution Conference & Exhibition: Asia and Pacific, Dalian, 2005, pp. 1-4.
[14] J. R. Celaya, A. A. Desrochers, and R. J. Graves. (2007) Modeling and Analysis of Multi-agent Systems using Petri nets.
[15] D. A. Cufiño V. (2009, Mar.) Detección y Control de Ciber Ataques: Estado del Arte y Modelos de Detección.
[16] Y. V. Makarov, V. I. Reshetov, A. Stroev, and I. Voropai, "Blackout Prevention in the United States, Europe, and Russia," Proceedings of the IEEE, vol. 93, no. 11, pp. 1942-1955, Nov.

Redes Inteligentes en la Protección de los Sistemas de Potencia
56
2005.
[17] M. G. Adamiak, et al., "Wide Area Protection: Technology and Infrastructures," IEEE Transactions on Power Delivery, vol. 21, no. 2, pp. 601-609, 2006.
[18] Western Electricity Coordinating Council. (2006, Nov.) Remedial Action Scheme Design Guide.
[19] W. Yi-Jen, L. Chih-Wen, and L. Yuin-Hong, "A PMU based special protection scheme: a case study of Taiwan power system," International Journal of Electrical Power & Energy Systems, vol. 27, no. 3, pp. 215-223, Mar. 2005.
[20] V. Madani and W. Higinbotham, "Advantages in Modern Communications as applied to Remedial Action Schemes and Control Centers," in IREP Symposium- Bulk Power System Dynamics and Control - VII, Revitalizing Operational Reliability, Charleston, 2007, pp. 1-12.
[21] M. V. Venkatasubramanian, M. Kezunovic, and V. Vittal, "Detection, Prevention and Mitigation of Cascading Events," Power Systems Engineering Research Center, Washington, USA, Final Project Report, Sep. 2008.
[22] IEEE PES CAMS. (2008, Jul.) Initial review of methods for cascading failure analysis in electric power transmission systems.
[23] R. E. Mackiewicz. (2006) Overview of IEC 61850 and Benefits.
[24] T. Murata, "Petri Nets: Properties, Analysis and Applications," Proceedings of the IEEE, vol. 77, no. 4, pp. 541-580, 1989.
[25] K. Jenses and L. M. Kristensen, Coloured Petri Nets - Modelling and Validation of Concurrent Systems. London: Springer, 2009.
[26] K. Jensen, Coloured Petri Nets: Basic Concepts, Analysis Methods and Practical Use, 2nd ed., W. Brauer, G. Rozenberg, and A. Salomaa, Eds. Berlin, Alemania: Springer, 1997, vol. 1.
[27] S. D. J. McArthur, et al., "Multi-Agent Systems for Power Engineering Applications—Part I: Concepts, Approaches, and Technical Challenges," IEEE Transactions on Power Systems, vol. 22, no. 4, pp. 1743-1752, Nov. 2007.
[28] C. R. Mason, The Art & Science of Protective Relaying. John Wiley & Sons Inc, 1956.