relatorio modelagem do bondinho
TRANSCRIPT
ESCOLA POLITÉCNICA DA USP
ENGENHARIA MECÂNICA
PME 2371 – Modelagem de Sistemas Mecânicos
Modelagem: Pantógrafo de Trens e
Bondes Elétricos
1
PME2371 – Modelagem de Sistemas Mecânicos
Prof. Décio Donha e Prof. Agenor Fleury
Integrante do grupo / Assinatura
Leandro Nunes Leite 6797122
Fernando Grieco 6851842
Paulo Henrique Ferreira 6849025
2

1. Introdução
O trabalho desenvolvido na disciplina de “Modelagem de Sistemas Mecânicos”
tem por finalidade desenvolver a habilidade do aluno em modelar sistemas de
diferentes origens a fim de obter o melhor resultado em termos de modelagem
matemática que poderá ser simulada posteriormente para análise de seus
resultados. Com isso, é visa-se capacitar o aluno a utilizar ferramentas
numéricas e softwares para análise de sistemas dinâmicos, particularmente o
Scilab. O tema do trabalho escolhido foi a modelagem de um pantógrafo de
bondes e trens.
3
2. Modelo Fisico
2.1. Hipóteses Simplificadoras
Devido à grande complexidade do problema do mundo real, devemos
fazer hipóteses que nos permitam criar um modelo físico-matemático, no qual
podemos iniciar um estudo sobre o problema. Algumas destas hipóteses são
descritas abaixo:
- As barras foram tratadas como delgadas, de massa “m”, comprimento
“a” e inércia “Jz” em relação ao centro de massa;
- A análise foi feita a parâmetros concentrados, tal que as massas m1 e m2
foram consideradas pontuais.
- Foi feito o estudo de apenas um grau de liberdade do sistema. Portanto,
foi considerado somente o movimento no plano vertical do sistema;
- Devido à simetria do dispositivo mecânico, todo equacionamento foi
realizado para somente um lado do mesmo, e de forma análoga para o
outro lado, de forma a compor o resultado final do modelo físico do
sistema;
- Há somente amortecimento viscoso entre as barras e entre as barras e
os mancais;
- A coordenada y do modelo da linha aérea varia senoidalmente com a
posição tal que a velocidade do carro é constante e igual a v e o
comprimento de onda da forma da linha aérea é λ;
4
- A posição de equilíbrio dinâmico do pantógrafo ocorre em θ=π4
, o qual
foi tomado como regime estacionário do movimento;
- A aceleração na posição de equilíbrio θ=π4
, visto o equilíbrio estático de
forças agindo sobre o sistema, deve ser nula, pois a resultante é nula, θ
= 0.
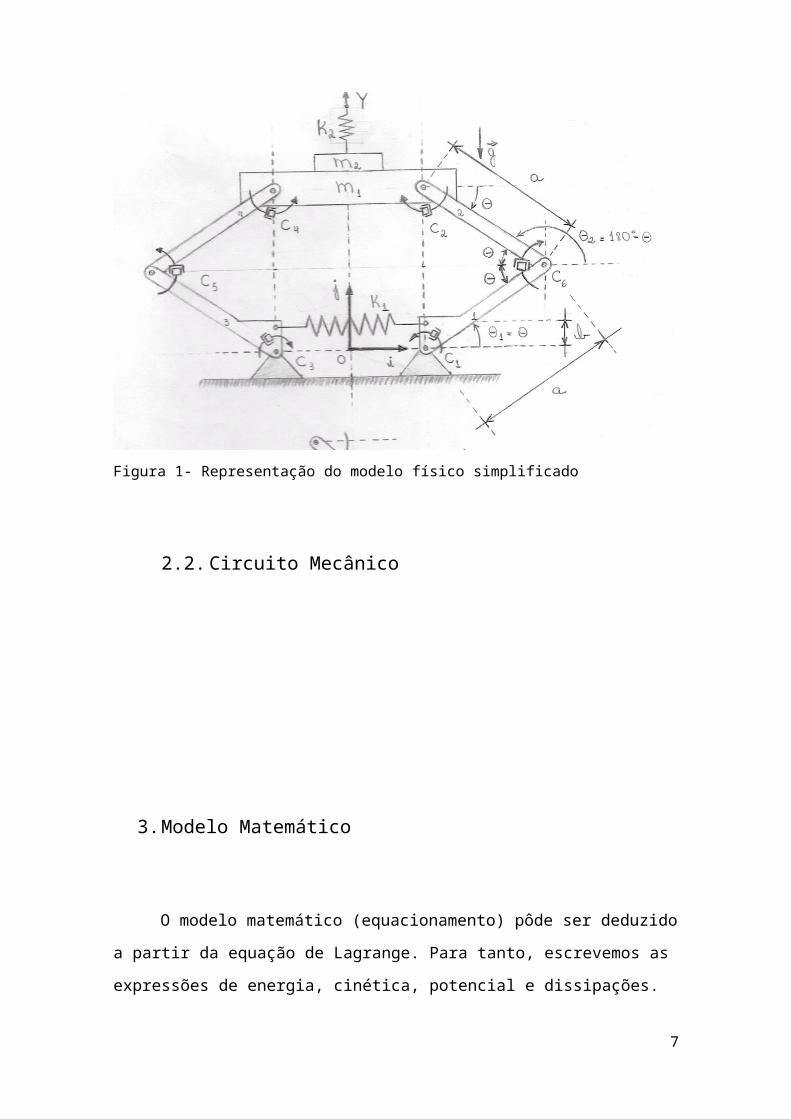
Figura 1- Representação do modelo físico simplificado
2.2. Circuito Mecânico
5
3. Modelo Matemático
O modelo matemático (equacionamento) pôde ser deduzido a partir da
equação de Lagrange. Para tanto, escrevemos as expressões de energia,
cinética, potencial e dissipações.
Energia associada às barras:
Figura 2-Representação das barras e amortecedores
J z=m a2
12
T 1=12
m vb1²+12
Jzb 1
Ω2=16
mθ2a2=T 3
T 2=12
m vb2²+12
Jzb 2
Ω2=16
m θ2a2=T 4
V 1=12
mgasenθ=V 3
V 2=32
mgasenθ=V 4
6
Energia associada aos amortecedores rotacionais viscosos:
Rc 1=12
c1θ2=Rc 3
Rc 2=12
c2 θ2=Rc 4
Rc 6=12
˙c6(2θ)2=Rc5
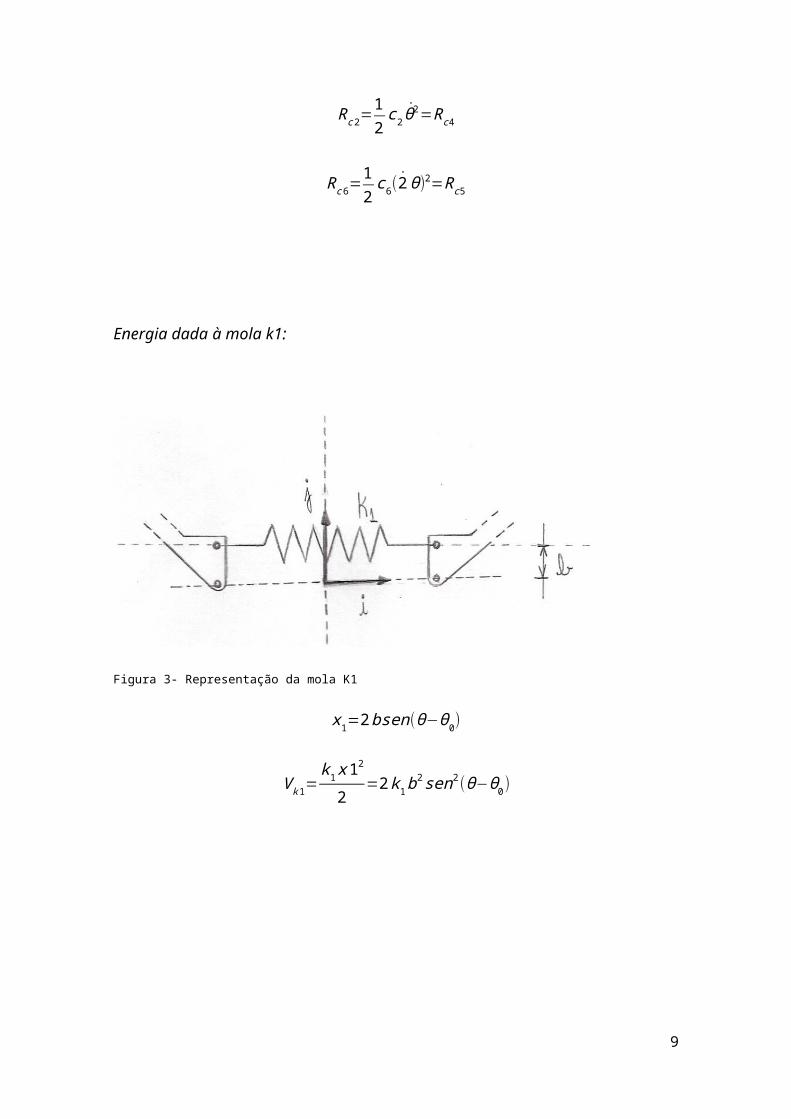
Energia dada à mola k1:
Figura 3- Representação da mola K1
x1=2bsen(θ−θ0)
V k 1=k1 x12
2=2k1b
2 sen2(θ−θ0)
7

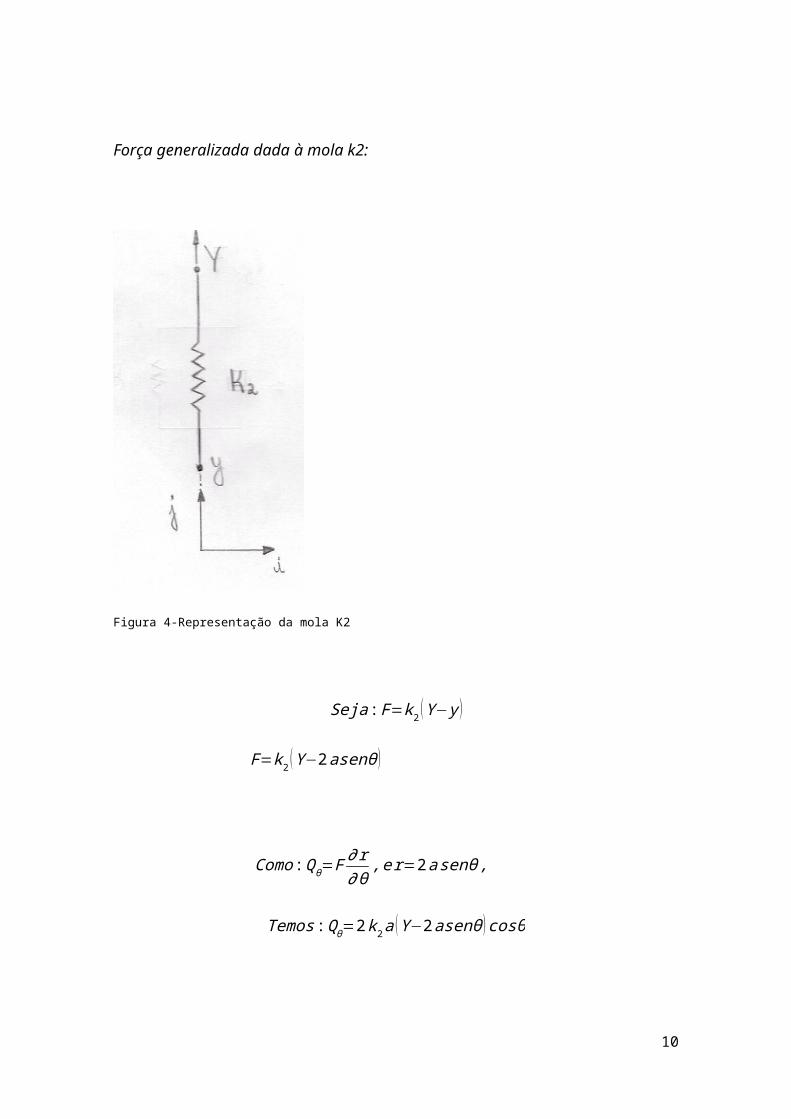
Força generalizada dada à mola k2:
Figura 4-Representação da mola K2
Seja :F=k 2 (Y− y )
F=k2 (Y−2asenθ )
Como :Qθ=F∂r∂θ
, e r=2asenθ ,
Temos :Qθ=2k2a (Y −2asenθ )cosθ
8
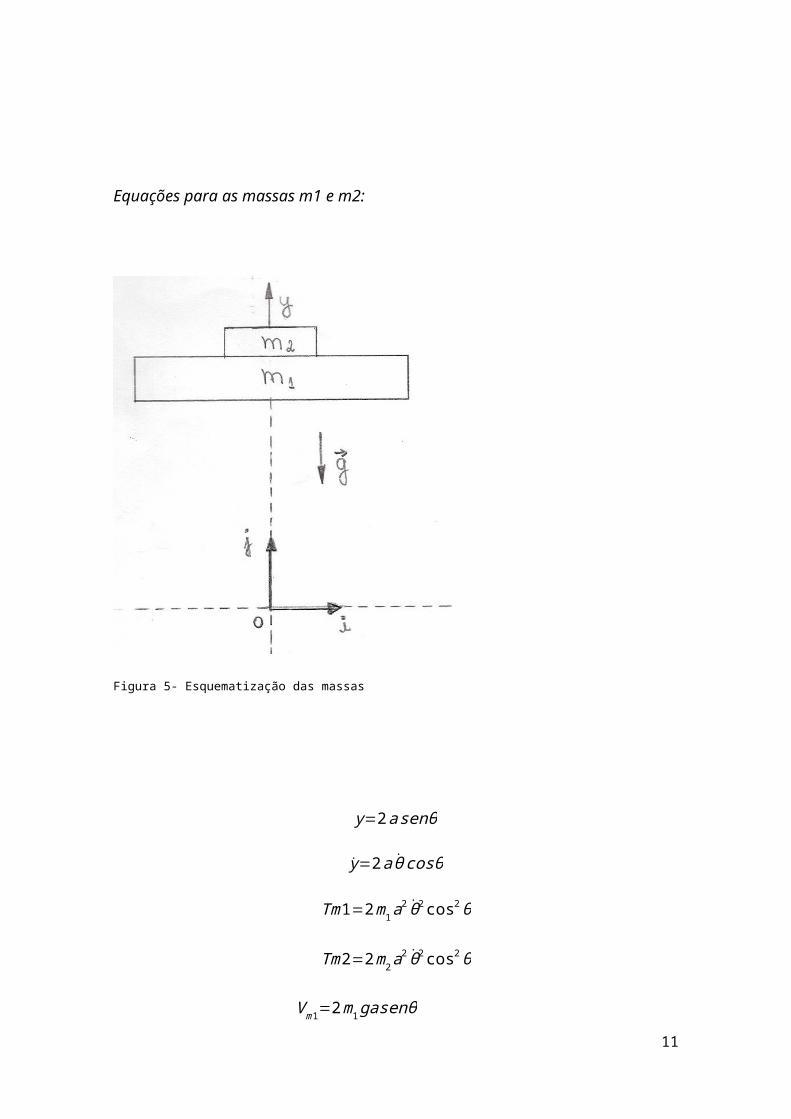
Equações para as massas m1 e m2:
Figura 5- Esquematização das massas
y=2a senθ
y=2a θ cosθ
Tm1=2m1a2 θ2cos2θ
Tm2=2m2a2 θ2 cos2θ
V m1=2m1gasenθ
V m2=2m2gasenθ
9
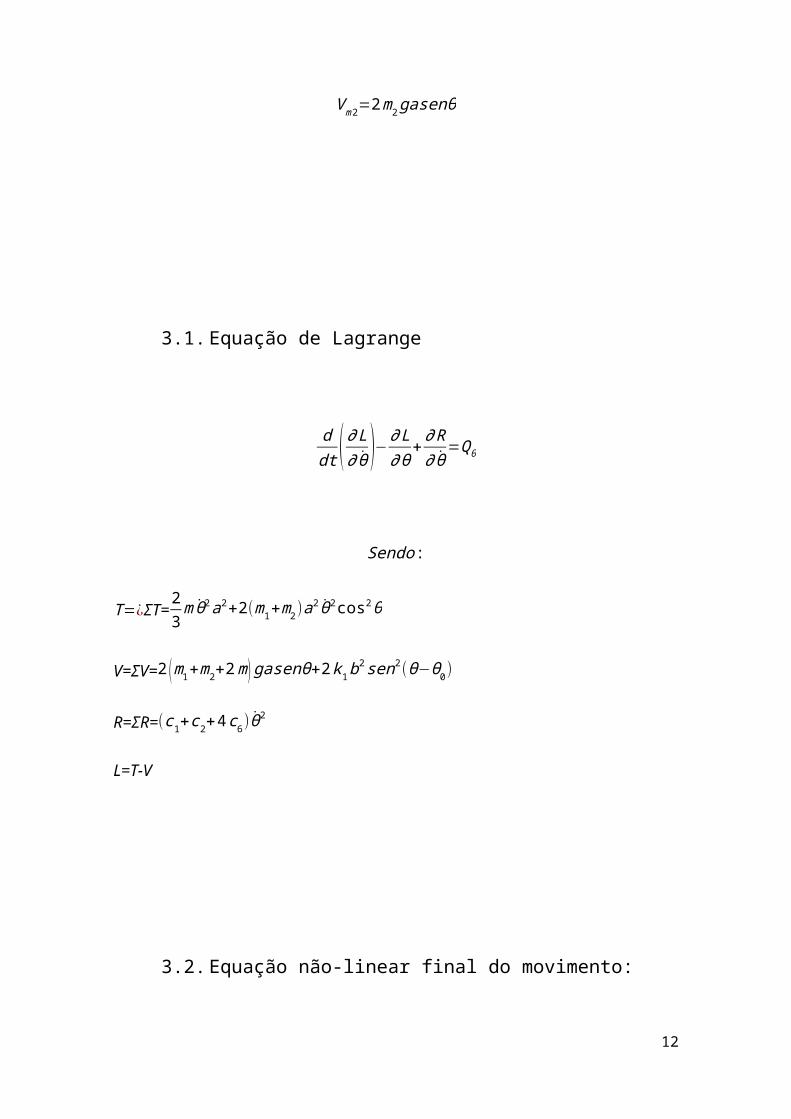
3.1. Equação de Lagrange
ddt ( ∂ L
∂ θ )−∂ L∂θ
+ ∂ R∂θ
=Qθ
Sendo :
T=¿ΣT=23
m θ2a2+2(m1+m2)a2 θ2cos2θ
V=ΣV=2 (m1+m2+2m ) gasenθ+2k1b2 sen2(θ−θ0)
R=ΣR=(c1+c2+4 c6) θ2
L=T-V
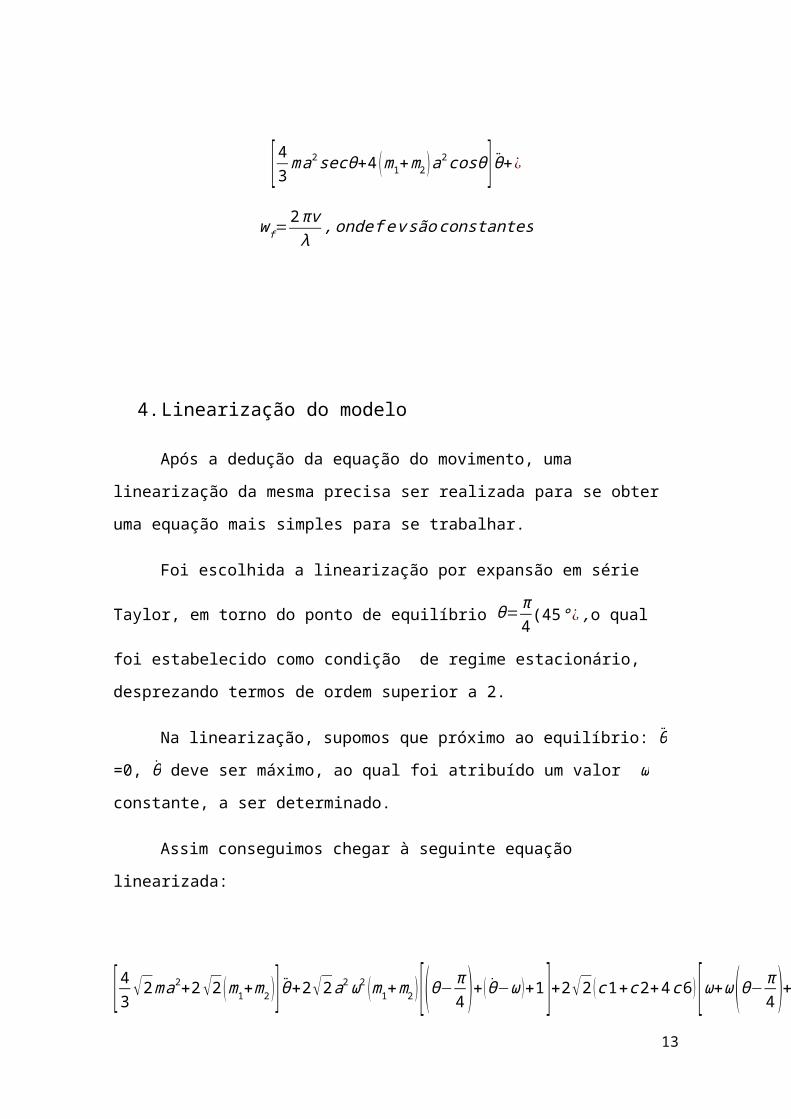
3.2. Equação não-linear final do movimento:
[ 43 ma2 secθ+4 (m1+m2 ) a2 cosθ] θ+¿
w f =2 πv
λ,onde f e v sãoconstantes
10
4. Linearização do modelo
Após a dedução da equação do movimento, uma linearização da mesma
precisa ser realizada para se obter uma equação mais simples para se
trabalhar.
Foi escolhida a linearização por expansão em série Taylor, em torno do
ponto de equilíbrio θ=π4
(45° ¿ ,o qual foi estabelecido como condição de
regime estacionário, desprezando termos de ordem superior a 2.
Na linearização, supomos que próximo ao equilíbrio: θ=0, θ deve ser
máximo, ao qual foi atribuído um valor ω constante, a ser determinado.
Assim conseguimos chegar à seguinte equação linearizada:
[ 43 √2m a2+2√2 (m1+m2 )] θ+2√2a2ω2 (m1+m2 )[(θ−π4 )+( θ−ω)+1]+2√2 (c1+c 2+4 c6 )[ω+ω (θ− π
4 )+( θ−ω )]−4√2 ( m1+m2 ) a2ω [1+(θ−π4 )+( θ−ω )]+2 (m1+m2+2m ) ga+√2K1b
2 (4θ−π )+ √22
K2a2 (4 θ−π+4 )=2K2aY 2 sen (ωft )
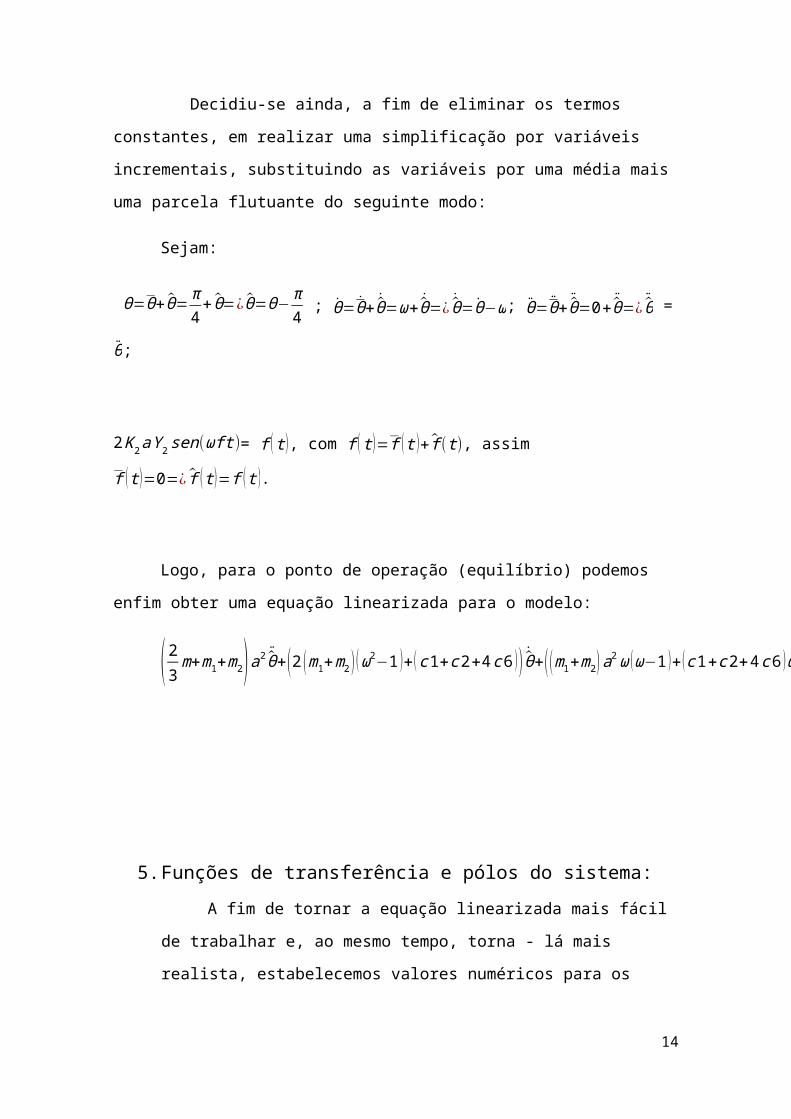
Decidiu-se ainda, a fim de eliminar os termos constantes, em realizar uma
simplificação por variáveis incrementais, substituindo as variáveis por uma
média mais uma parcela flutuante do seguinte modo:
Sejam:
θ=θ+θ=π4
+θ=¿ θ=θ−π4
; θ=θ+ ˙θ=ω+ ˙θ=¿ ˙θ= θ−ω; θ=θ+ ¨θ=0+ ¨θ=¿ ¨θ = θ;
2K2aY 2 sen(ωft)= f ( t ), com f (t )=f (t )+ f (t), assim f ( t )=0=¿ f ( t )=f ( t ).
Logo, para o ponto de operação (equilíbrio) podemos enfim obter uma
equação linearizada para o modelo:
( 23m+m1+m2)a2 ¨θ+(2 ( m1+m2 ) (ω2−1 )+(c 1+c2+4c 6 ) ) ˙θ+( (m1+m2 ) a2ω (ω−1 )+(c1+c2+4 c6 ) ω+2K1b2+ K2a
2 ) θ=√22
K2aY 2 sen(ωft )
11
5. Funções de transferência e pólos do sistema:
A fim de tornar a equação linearizada mais fácil de trabalhar e, ao
mesmo tempo, torna - lá mais realista, estabelecemos valores numéricos
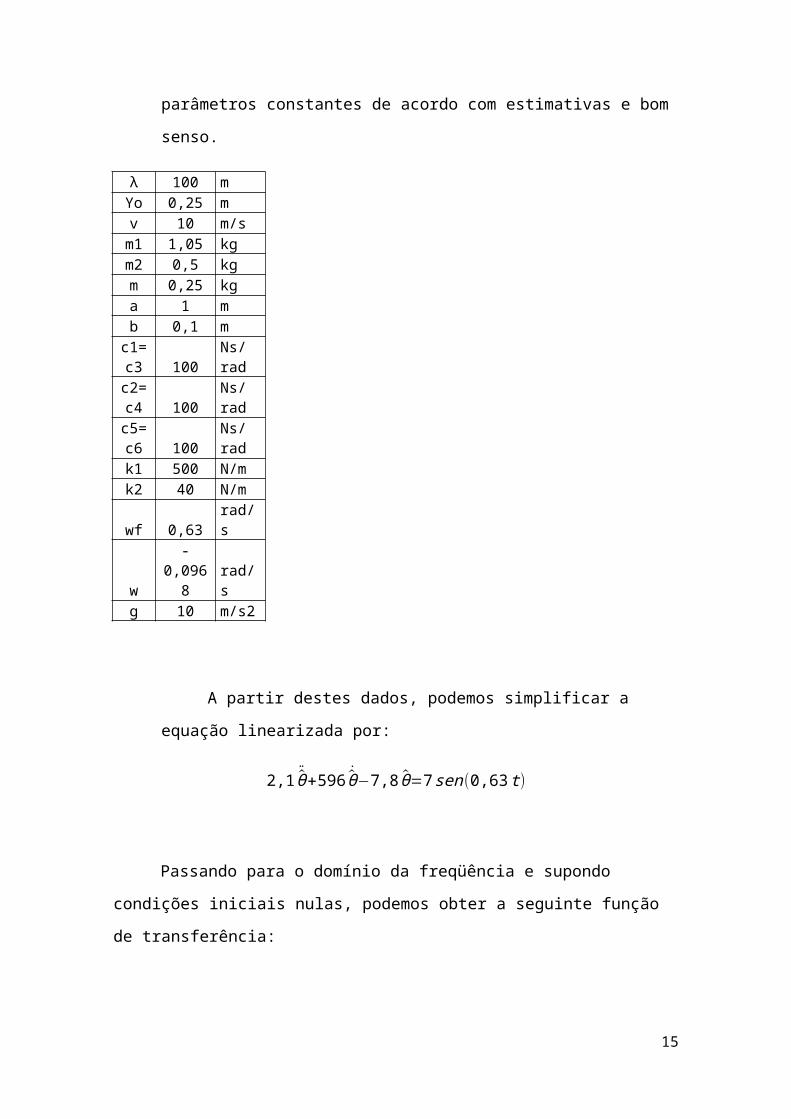
para os parâmetros constantes de acordo com estimativas e bom senso.
λ 100 mYo 0,25 mv 10 m/s
m1 1,05 kgm2 0,5 kgm 0,25 kga 1 mb 0,1 m
c1=c3 100
Ns/rad
c2=c4 100
Ns/rad
c5=c6 100
Ns/rad
k1 500 N/mk2 40 N/mwf 0,63 rad/sw -0,0968 rad/sg 10 m/s2
A partir destes dados, podemos simplificar a equação linearizada
por:
2,1 ¨θ+596 ˙θ−7,8θ=7 sen(0,63 t)
Passando para o domínio da freqüência e supondo condições iniciais
nulas, podemos obter a seguinte função de transferência:
12
Ω(S)Y (S)
=G ( s )= 4,41
(0,4+s2) (2,1 s2+596 s−50)
Cujos pólos valem:
S1 = -283,72; S2 =-0,0000247+0,632i; S3 =-0,0000247-0,632i;
S4 =-0,0838.
6. Representação do espaço de estado:
Para escrevermos a equação linearizada na forma de espaço de estado,
devemos escreve- la na forma:
x1=θ ;
7. Matriz de transição
8. Análise de estabilidade
9. Simulações no Scilab
10. Domínio do tempo X Domínio da freqüência
13
11. Conclusões:
Podemos dizer que este trabalho nos foi de grande aprendizado.
Este nos requisitou, desde o inicio do semestre, dedicação, inteligência,
pesquisa e até associação com outras disciplinas antes estudadas.
Demoramos um pouco para decidir o tema, entretanto achamos
que conseguimos, por fim, uma boa simulação para um caso
simplificado de pantógrafo de bondes.
Destacamos algumas dificuldades durante as etapas do projeto,
como o equacionamento, linearização da equação final, funções de
transferência e toda a parte computacional usando o Scilab.
No equacionamento, ficou evidente que não conseguiríamos
determinar a equação do movimento apenas usando o diagrama de
corpos livres e balanço de forças, pois o sistema juntava um movimento
translacional com um rotacional. Devido a essa dificuldade, apelamos
para a equação de Lagrange, aprendida anteriormente na disciplina
Mecânica B e relembrada durante o atual curso.
Durante a Linearização, alguns parâmetros tiveram de ser
simplificados como a aceleração angular (teta ponto) ao redor do ponto
de equilíbrio( nesse caso, teta 45 graus), para que pudéssemos dar
continuidade ao projeto. Algumas de nossas duvidas foram sanadas,
pelos professores, durante as aulas e atendimentos extraclasses.
Com relação ao Scilab, acreditamos que as aulas de laboratório
foram insuficientes para um aprendizado mais sólido, sendo necessárias
aulas mais focadas no projeto, bem como aulas voltadas somente ao
software e a linguagem em si.
14
12. Bibliografia
ACBNEO. O bonde elétrico. Disponível em
<http://www.luiz.delucca.nom.br/acbneo/funcionais_inicial.html>.
Garcia, Cláudio – ‘Modelagem e Simulação’ – Edusp 1997
Ogata, K. – Engenharia de Controle Moderno, Prentice-Hall, 3a. Ed., 1997
OoCities. As características do bonde. Disponível em
<http://www.oocities.org/br/gurnemanzbr/acbant/funcionais.html>.
TGVBR. Ferrovias Brasil. Disponível em
<http://tgvbr.protrem.org/phpBB3/viewtopic.php?f=7&t=4406>.
Vibrações. Site da disciplina de Vibrações. Disponível em
<http://sites.poli.usp.br/d/pme2341/>.
15