relazione di fine tirocinio -...
TRANSCRIPT

Università degli Studi “Roma Tre” Dipartimento di Ingegneria
Laurea Magistrale in Ingegneria delle Infrastrutture Viarie e dei Trasporti
Relazione di fine tirocinio
A.A. 2014/2015
Acquisizione delle competenze informatiche per l’utilizzo dei software “Autodesk” ai fini della
modellazione tridimensionale di progetti infrastrutturali
Tutor: Prof. Ing. Fabrizio D’Amico
Tirocinante: Andrea Lucaroni
Matricola: 425789
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.2
Sommario
Premessa __________________________________________________________ 3
Modellazione tridimensionale di progetti infrastrutturali e Sicurezza stradale _ 4
Computer Grafica __________________________________________________ 11
Computer Grafica 3D _______________________________________________ 13
Descrizione e composizione della scena __________________________________________ 14
Rendering __________________________________________________________________ 15
Principali software di Computer Grafica 3D ____________________________ 16
Galleria fotografica di render prodotti tramite software di Grafica 3D ______ 18
Esempi di scenari infrastrutturali virtuali inseriti in contesti ambientali virtuali _______ 18
Esempi di scenari infrastrutturali virtuali “fotoinseriti” in contesti ambientali reali ____ 20
Applicazione delle conoscenze acquisite durante il percorso di tirocinio _____ 24
Conclusioni _______________________________________________________ 32
Premessa
L’attività di tirocinio si è svolta presso il Laboratorio di Infrastrutture Viarie – Dipartimento di
Ingegneria dell’Università degli Studi Roma Tre.
L’attività è stata condotta nel periodo di tempo intercorso fra la data di inizio – 13/07/2015 – e la
data di fine – 1/09/2015 – per una durata complessiva di 75 ore, corrispondenti a 3 CFU (Crediti
Formativi Universitari).
La finalità dell’attività di tirocinio è stata quella di acquisire le competenze e le abilità informatiche
tali da garantire utilizzo e padronanza delle funzioni 3D dei software prodotti dall’azienda
Autodesk, implementati per la progettazione di infrastrutture, costruzioni civili e industriali, ma
anche di contenuti multimediali per l'intrattenimento, progettazione meccanica e manifatturiera.
L’acquisizione di tali conoscenze si rivela imprescindibile e propedeutica a quell’insieme di
operazioni, che nel complesso costituiscono la macro-attività della:
modellazione tridimensionale di progetti infrastrutturali.
L’importanza di possedere conoscenze tali da consentire il ricorso alla modellazione
tridimensionale di progetti infrastrutturali è conferita dalla principale attività ad essa correlata:
realizzazione di render, scenari, animazioni dinamiche 3D,
eventualmente fotorealistici,
finalizzata essenzialmente alla:
- illustrazione più chiara ed inequivocabile delle soluzioni progettuali assunte e del loro
inserimento nel contesto ambientale;
- conduzione di analisi incentrate sulla tematica della sicurezza stradale, che hanno come
oggetto di studio il comportamento degli utenti, alla guida di veicoli virtualmente inseriti
all’interno degli scenari riprodotti.
Modellazione tridimensionale di progetti infrastrutturali e Sicurezza stradale
Se la correlazione fra “modellazione tridimensionale di progetti infrastrutturali” e “illustrazione più
chiara ed inequivocabile” risulti palese e non richieda ulteriori digressioni, diverso è il caso relativo
alla correlazione fra “modellazione tridimensionale di progetti infrastrutturali” e “analisi incentrate
sulla sicurezza stradale, che contemplano lo studio del comportamento di guida degli utenti”, per
cui si ritiene necessario dedicarle un approfondimento, in modo da cogliere i benefici che la
modellazione può portare alle analisi, in termini di bontà degli output restituiti dai modelli di analisi
e, conseguentemente, in termini di costi sociali-economici.
L’incidentalità stradale si configura come una problematica di assoluta priorità in virtù dell’elevato
costo umano-sociale, connesso al numero di vittime mietute giornalmente, e dell’elevato costo
economico, connesso alle ingenti spese a cui il settore della sanità pubblica deve far fronte per la
cura degli utenti infortunati.
D’altronde, facendo riferimento alle informazione fornite annualmente dalle banche dati
internazionali e nazionale (ISTAT), emergono numeri drammaticamente allarmanti:
A livello mondiale si parla di 1,3 milioni di decessi e di 25 milioni di feriti, annualmente, sulle
strade (3.000 decessi e 40.000 feriti al giorno).
Di questi 1,3 milioni di decessi, il 46% è da distribuire fra pedoni, ciclisti e motociclisti, definiti
come “utenze deboli, vulnerabili” della strada. Tale percentuale è più elevata nei paesi a basso
reddito, poiché la quota parte di popolazione intesa come “utenza vulnerabile” è maggiore.
Oltre il 90% dei morti sulle strade mondiali (si verifica nei paesi a basso-medio reddito, che hanno
poco meno del 50% dei veicoli registrati a livello mondiale.
Negli USA si registrano 33.000 decessi e 1,5 milioni di feriti all’anno.
In Europa, 28.000 decessi e 300.000 feriti in un anno.
In Italia, poco più di 3600 decessi e 180.000 incidenti in un anno (10 morti e 500 incidenti al
giorno).
Attraverso una serie di studi condotti in alcuni paesi, è stato appurato che il costo sociale
dell’incidentalità stradale sia riconducibile al 1,5-2,5% del PIL.
Tale dato è stato ottenuto andando ad associare un costo monetario ad ogni singolo incidente
mortale (1,6 milioni di €) e ad ogni incidente con feriti gravi un valore monetario (variabile da
30.000€ a 100.000€).

Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.5
Queste quantificazioni si basano sulla stima delle perdite di produzione lavorativa relativa al
singolo individuo e sono fondamentali per andare a verificare se un intervento, volto a ridurre
l’incidentalità (tralasciando il lato etico/morale della questione), risulta economicamente
vantaggioso (costo minori dei benefici stimati associando il costo monetario ad ogni evento), in
modo da ottimizzare gli scarsi fondi di cui spesso si dispone (in Italia si spende 20 volte di meno
rispetto a quanto si spende in Svezia, per la sicurezza stradale).
La riduzione degli incidenti mortali è quella che restituisce i maggiori benefici economici.
Se il trend mondiale dovesse essere confermato, si prevede che entro il 2030 l’incidentalità
stradale rappresenterà la 4° causa di morte principale.
La drammaticità del trend complessivo a livello mondiale è legata al fatto che in molti paese
l’incidentalità cresce a ritmi elevati, specialmente nei paesi in via di sviluppo.
N.B. Esiste una teoria consolidata che sostiene la correlazione fra economia del paese e condizioni
di sicurezza dell’esercizio di guida nel paese stesso: in particolare, per i paesi in via di sviluppo si
ha che il tasso di motorizzazione ha un andamento speculare rispetto al trend economico del paese
e l’andamento del tasso di mortalità dopo un iniziale trend crescente, inizi a decrescere sotto la
forte ipotesi che lo sviluppo economico sia accompagnato da una crescita culturale/tecnologica che
conduce a più iniziative relative alla sicurezza stradale, quindi a migliori condizioni di sicurezza
dell’esercizio di guida. Pertanto, i principali paesi europei si ritrovano attualmente sul tratto
discendente di questa curva a campana legata al tasso di mortalità (picco della curva relativa ad
Italia e paesi del UE15 localizzato tra il 1960 e il 1970; per il Portogallo il picco è traslato di circa
2 decenni, coerentemente con il boom economico che ha avuto, ritardato rispetto a quello dei paesi
del UE15), differentemente da molti paesi in via di sviluppo che si trovano in corrispondenza del
tratto ascendente.
Tutto ciò va in controtendenza rispetto a quanto si verifica a livello italiano ed europeo, dove,
rispetto ai primi anni del 2000, si è giunti a dimezzare le morti su strada (ad oggi 28.000)
mentre si è registrato un andamento decrescente più blando per incidenti e feriti (riduzione di
quasi il 25%, che ha portato dai 2 milioni di incidenti e 1,5 milioni di feriti nel 2001, a circa
1,5 milioni di incidenti e 1,1 milioni nel 2010).
Non si è ottenuto il medesimo risultato, relativamente al numero di incidenti e feriti.
Nel 2001, a livello comunitario/europeo, è stato fissato un obiettivo che tutti i membri dovevano
raggiungere, entro il 2010: riduzione percentuale della mortalità su strada del 50%.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.6
Alcuni paesi hanno raggiunto l’obiettivo (paesi virtuosi o paesi che partivano dalle condizioni più
drammatiche, come i paesi baltici); altri non l’hanno raggiunto (vedi Italia che ha ottenuto una
riduzione percentuale del 42,4%; paesi dell’est europeo in via di sviluppo, i quali si trovano in
corrispondenza del ramo ascendente della curva sopradescritta).
A livello europeo, si è ottenuto un risultato medio del 42% (l’Italia è in linea con la media europea),
passando da 54.000 morti nel 2001 a circa 31.000 nel 2010.
L’Unione Europea ha fissato due obiettivi da perseguire nell’arco temporale 2011-2020:
- ulteriore riduzione percentuale del 50% della mortalità su strada (particolarmente
complesso per quei paesi in cui il tasso di mortalità risulta molto basso, vedi paesi nordici);
- riduzione del numero di feriti (tuttavia è necessario definire una scala di entità del
ferimento, condivisa a livello europeo, prima di arrivare a fissare un valore di riduzione
percentuale).
Dalle analisi annualmente condotte (in riferimento ai più svariati aspetti), è emerso come al 2012, si
è accumulato un certo ritardo rispetto al trend medio che si dovrebbe mantenere al fine di rispettare
l’obiettivo comunitario nel 2020, legato alla mortalità.
Per poter conseguire gli obiettivi di riduzione della mortalità e del numero degli incidenti, si è
resa necessaria la definizione di un protocollo di valutazione delle condizioni di sicurezza, da
applicare sia al patrimonio stradale esistente, sia alle opere stradali future, sinteticamente
indicato come:
ANALISI DI SICUREZZA
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.7
L’analisi di sicurezza si articola in 3 step consecutivi:
1) Analisi incidentale, che consiste nell’individuare possibili interventi da realizzare a valle
delle problematiche (cause che hanno determinato lo scenario incidentale descritto dal dato
di partenza a disposizione) messe in luce dall’analisi del dato incidentale e dal sopralluogo
(Road Safety Inspection).
2) Selezione degli interventi, che consiste nella scelta della più opportuna soluzione tecnica
tenendo conto della funzionalità sistemica dell’infrastruttura.
3) Verifica dell’incidentalità attesa, che consiste nello stabilire se un progetto (in caso di
nuova realizzazione) o l’intervento selezionato (in caso di viabilità esistente) è congruo ed
efficace in termini di sicurezza stradale: congruità ed efficacia vengono stabilite facendo
riferimento al parametro dell’incidentalità attesa (parametro che quantifica le prestazioni del
progetto, in termini di incidentalità).
Quest’ultimo step rappresenta quella verifica di qualità dei progetti in funzione della
sicurezza stradale che è sempre mancata all’interno dei canonici iter progettuali.
La fase di maggiore interesse è rappresentata proprio da quest’ultima, oggetto di continui progetti di
ricerca finalizzati alla definizione di metodi/modelli che restituiscano una stima del parametro
dell’incidentalità attesa, quindi dello scenario incidentale previsto, quanto più possibile verosimile,
il che garantirebbe risultati oltremodo soddisfacenti nell’ottica di riduzione del numero di vittime ed
incidenti.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.8
I primi metodi/modelli introdotti per la stima dell’incidentalità attesa sono stati i metodi
tradizionali.
Si tratta di metodi obsoleti, impiegati a partire dagli anni ’60, ossia dal momento in cui ci si pose il
problema della sicurezza stradale, poiché mutò la concezione della natura dell’evento incidentale da
CASUALE (anni ’30-’40) a CAUSALE, quindi determinato da una o più cause.
Tali metodi valutano l’incidentalità attesa mediante la stima di indicatori di rischio, basati
prettamente sulle condizioni geometriche del tracciato (trascurando gli effetti che geometria e flussi
di traffico hanno sul comportamento dell’utente).
Tuttavia, tali metodi hanno evidenziato limiti oggettivi, essenzialmente legati al fatto che:
- Non tengono conto della fruizione della strada (entità dei flussi);
- Per molti di essi, NON è emersa coerenza con l’incidentalità.
Solo per il CCR1 si è verificata una discreta coerenza con l’incidentalità, tuttavia episodica;
- Trattandosi di variabili puramente geometriche, non garantiscono una valida correlazione con i
sinistri rilevati.
Successivamente, nel corso degli anni, si è assistito ad un’evoluzione della progettazione stradale,
non più fondata sui soli criteri geometrici ma anche su criteri che tenessero in conto la funzionalità
(flussi di traffico), e successivamente, il “fattore umano” (interazione fra utente, strada, vettura).
Di pari passo, si è assistito ad un’evoluzione della letteratura relativa alla sicurezza stradale, volta a
definire metodi più efficaci che garantissero una previsione più affidabile dell’incidentalità attesa,
quali i metodi innovativi, che prevedono l’applicazione di procedure/protocolli provenienti da altre
discipline: reti neurali, prese in prestito dall’informatica, e analisi probabilistica (teoria del hazard
analysis).
Per quanto riguarda le reti neurali, si evidenziano due limiti principali:
- la rete non consente di verificare direttamente l’incidenza della modifica di una variabile di
input sulla variazione della variabile di output, ossia l’incidentalità attesa (si dice che “la rete
interpreta ma non esplicita i rapporti di causa-effetto”);
- la rete modellata sulla base di dati e caratteristiche di una determinata infrastruttura, non
funziona se applicata ad un infrastruttura con caratteristiche differenti. 1Curvature Change Rate CCR – 1978 Parametro che tiene conto dell’intero elemento curvilineo (sia dell’arco di cerchio, sia delle eventuali clotoidi) e relaziona: raggio dell’elemento circolare; angolo di deviazione dell’elemento circolare; parametri degli elementi contigui alla curva.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.9
Per quanto riguarda l’analisi probabilistica il principale limite è legato alla complessità di stima
delle probabilità di accadimento di alcuni eventi elementari.
Per far fronte ai limiti legati ai suddetti metodi, recentemente ne sono stati sviluppati altri
alternativi, finalizzati alla restituzione di un output più attendibile – i metodi sperimentali – che si
basano su:
- analisi “on sight”, ossia su studi effettuati in campo, che prevedono l’impiego di: veicoli
strumentati (dotati di accelerometri, strumenti GPS); rilievi per monitorare velocità, traiettorie,
comportamenti di guida;
- analisi/verifiche in realtà virtuale (simulatore), oggigiorno sempre più diffuse perché è l’unico
metodo che consente di valutare il comportamento dell’utente al variare di tutte le variabili
geometriche/psico-fisiche che entrano in gioco nell’esercizio della guida (geometrie, flussi di
traffico, condizionamenti al contorno e visuali libere, stato di lucidità).
Il maggiore sforzo della ricerca nell’ambito della sicurezza stradale si è concentrato proprio sui
metodi basati su analisi/verifiche in realtà virtuale, i quali, a differenza di tutti gli altri, garantiscono
una serie di vantaggi notevoli:
- rilevamento esaustivo delle condizioni di guida, favorito da livelli di precisione e capacità di
calcolo molto elevate;
- analisi del comportamento umano al variare delle condizioni di deflusso e delle caratteristiche
geometriche del tracciato;
- possibilità di indagare un elevato numero di scenari e soluzioni progettuali, garantendo
un’elevata variabilità delle condizioni al contorno;
- ripetitività e riproducibilità delle misure;
- efficace simulazione della realtà (strada ed esercizio di guida);
- onere finanziario contenuto.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.10
Una dei principali aspetti su cui si fonda il successo dei metodi basati sulla guida in realtà virtuale, è
rappresentato dalla possibilità di riprodurre in maniera altamente verosimile gli scenari di guida:
maggiore è la verosimiglianza dello scenario più idoneamente l’utente riesce a calarsi al suo
interno, assumendo comportamenti quanto più prossimi a quelli che assumerebbe durante
l’esercizio di guida nella realtà maggiore sarà l’affidabilità degli output restituiti dal modello.
L’elaborazione di scenari di guida altamente verosimili è resa possibile dall’impiego di software di
Computer Grafica 3D, che rappresenta una branca della vasta disciplina denominata Computer
Grafica.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.11
Computer Grafica
La Computer Grafica, dall’inglese Computer Graphics (d’ora in poi abbreviata in CG), definita
anche grafica digitale o grafica computerizzata, consiste nella generazione e manipolazione di
immagini per mezzo del computer.
La CG nasce in ambito militare, a seguito di un importante programma di ricerca, finanziato dalle
forze armate USA, articolato in più progetti finalizzati allo sviluppo dei primi calcolatori elettronici
digitali, condotto intorno alla metà del 1900.
Durante la conduzione di uno di questi progetti, denominato “Whirlwind”, vennero osservate ed
appurate le particolari capacità grafiche di cui gli elaboratori risultavano dotati, in virtù delle quali
si arrivò a teorizzare la possibilità di trasformare dati numerici in informazioni grafiche.
Risultava così tracciata la strada che avrebbe condotto alla nascita e al successivo incessante
sviluppo della CG: la scoperta delle possibilità grafiche dei calcolatori indusse ad ampliare i confini
dell’applicazione delle capacità di calcolo offerta dagli stessi oltre l’ambito militare, “penetrando”
nel settore delle arti visive. Tuttavia dovranno passare diversi anni prima che queste potenzialità
grafiche trovino una diretta concretizzazione nelle prime applicazioni pratiche.
La ricerca attorno alle applicazioni dell’informatica in campo grafico si sviluppa inizialmente in
seno ad alcune grandi società statunitensi come la Boeing Company e la Bell Telephones, che nei
primi anni ’60 raggiungono risultati significativi per il futuro della CG.
Nei laboratori della Boeing un gruppo di ricercatori – a capo dello scienziato William Fetter –
sviluppa una tecnica di elaborazione dei dati, chiamata con il nome di Computer Graphics che
permette di disegnare velivoli in proiezione. Il perfezionamento di questa tecnica condurrà il gruppo
di Fetter a realizzare brevi sequenze animate usate per simulare in modo tridimensionale alcune
condizioni in campo aeronautico. A Fetter si deve anche la prima realizzazione al computer di un
modello tridimensionale di una figura umana in grado di essere animato da sette sistemi di
articolazioni distinti.
Nei laboratori della Bell, lo scienziato Edward Zajac trasforma uno studio sul comportamento
dinamico di un satellite intorno al sole in un breve film di quattro minuti denominato Simulation of
a Two-Gyro, Gravity-Gradient Attitude Control System (1963), che costituisce la prima animazione
mai realizzata con un computer: tale filmato rappresenta una vera e propria pietra miliare nel
processo di sviluppo della CG dagli anni ’50 ad oggi.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.12
Altro contributo notevole per lo sviluppo della CG viene fornito da Ken Knowlton, scienziato
operante presso il laboratori della Bell, che, dopo essere riuscito a scomporre un’ immagine in un
mosaico di unità discrete e a registrarle in base alla loro luminosità, scrive un elementare linguaggio
di programmazione – denominato Beflix (1963) – con cui è possibile visualizzare su schermo
sequenze animate di immagini precedentemente memorizzate.
A partire dalla seconda metà degli anni ottanta, si assiste alla vasta diffusione di personal computer
con una sempre maggiore capacità tecnologica per l'elaborazione e visualizzazione di immagini,
pertanto, con l’avvento degli anni novanta, la CG risulta ormai di dominio consolidato di tutti i
computer con la diffusione di schede video di grande versatilità e potenza. A seguito dell'evoluzione
dell'informatica e del conseguente abbassamento dei prezzi dei personal computer, cresce a
dismisura il bacino d’utenza che ha potenzialmente accesso alla CG.
Oggigiorno, il ricordo alla CG è consuetudine in molteplici ambiti professionali: videogiochi;
ritocco fotografico; montaggio di filmati; industria cinematografica (film d'animazione digitale ed
effetti speciali dei film); tipografia (impaginazione di giornali e riviste); progettazione grafica
(CAD) nell’industria metalmeccanica, elettronica, impiantistica ed edile; visualizzazione di dati
tecnico/scientifici (CAE); sistemi informativi territoriali (SIT o GIS).
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.13
Computer Grafica 3D
La Computer Grafica 3D (d’ora in poi abbreviata in CG3D) è un ramo della computer grafica che si
basa sull'elaborazione di un insieme di modelli tridimensionali tramite algoritmi, al fine di produrre
una verosimiglianza fotografica e ottica nell'immagine finale.
La CG3D risulta largamente impiegata per la creazione e postproduzione2 di opere o parti di opere
per il cinema o la televisione, nei videogiochi, nell’architettura, nell’ingegneria, nell’arte e in
svariati ambiti scientifici, dove la produzione di contenuti con altri mezzi non è possibile o non
conveniente.
Il metodo di produzione della computer grafica 3D si articola in 2 fasi essenziali:
- Descrizione e composizione della scena
Consiste nel descrivere e ricreare tutto ciò che si intende visualizzare – che prende il nome
di scena – tramite oggetti tridimensionali, ricreati attraverso rappresentazioni matematiche,
dette modelli;
- Rendering
Consiste nella produzione di un’immagine 2D dalla scena, tramite un meccanismo definito
“motore di rendering” che si fa carico di tutti i calcoli necessari per la sua creazione,
mediante algoritmi che simulano il comportamento della luce e le proprietà ottiche e fisiche
di oggetti e materiali.
2 La post produzione è la fase intermedia della produzione cinematografica, successiva alla fase di lavorazione in cui il film viene girato ed antecedente la fase di distribuzione al pubblico del prodotto finito. Anche nella fotografia si parla di post produzione alla fine di riprese fotografiche in digitale. Le componenti principali della fase di post-produzione sono:
- montaggio del film (con la moviola o più comunemente con le tecniche digitali); - registrazione delle musiche, nel caso non siano già pronte o si voglia sincronizzarle alla perfezione col film
montato (ad esempio per sottolineare una scena importante); - creazione degli effetti speciali visivi (ad esempio utilizzando le tecniche di animazione al computer); - aggiunta degli effetti sonori; - realizzazione del doppiaggio (se necessario, come per le voci fuori campo, ecc.); - montaggio, sincronizzazione e missaggio delle varie tracce audio a formare la colonna sonora; - correzione del colore; - taglio del negativo e stampa della copia definitiva, usata per creare le copie da distribuire.
Tutte queste procedure messe assieme richiedono spesso molto più tempo di quello impiegato a girare il film.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.14
Descrizione e composizione della scena
Per la descrizione della scena e la costruzione di oggetti tridimensionali semplici si ricorre
all’impiego di equazioni operanti su un sistema di riferimento cartesiano tridimensionale. Sebbene
l’impiego di equazioni così semplici possa sembrare limitativo, in realtà l'insieme di oggetti
rappresentabili viene ampliato mediante la tecnica, definita geometria solida costruttiva
(constructive solid geometry – CSG), la quale combina oggetti solidi (cubi, sfere, cilindri, ecc.) per
formare oggetti più complessi attraverso le operazioni booleane (unione, sottrazione e intersezione)
(es. un tubo può essere rappresentato come differenza fra due cilindri aventi diametro differente).
Tuttavia, le sole equazioni non sono sufficienti a descrivere con accuratezza le forme complesse che
costituiscono buona parte del mondo reale, pertanto, per la modellazione di superfici curve, si
ricorre alle patch, ovvero l’estensione delle spline3, che approssimano curve continue alle tre
dimensioni.
L’impiego di equazioni matematiche richiede l'utilizzo di una gran quantità di potenza di calcolo, il
che ne esclude l’impiego per le applicazioni in tempo reale, quali videogiochi e simulazioni.
Pertanto, è stata sviluppata una tecnica alternativa a quella basata sulle equazioni matematiche, più
efficiente, diffusa e flessibile, definita modellazione poligonale (dall’inglese poly-modelling):
questa garantisce un maggiore livello di dettaglio a spese però della maggiore quantità di
informazioni necessaria a memorizzare l'oggetto risultante, chiamato modello poligonale.
Tramite la tecnica definita superfici di suddivisione, basata su algoritmi per la rappresentazione di
superfici curve, è possibile raffinare ulteriormente un modello poligonale: attraverso un processo di
interpolazione iterativa, si rende il modello sempre più denso di poligoni, che consentono di
approssimare al meglio curve ideali, derivate matematicamente dai vari vertici del modello.
Tramite i suddetti modelli tridimensionali, è possibile rappresentare le più semplici forme
geometriche, dette primitive, che costituiscono il primo passo verso la composizione della scena. A
partire dalle primitive si procede con la creazione di oggetti più complessi, tramite la scomposizione
in singole facce o la combinazione di più forme.
Le primitive sono descritte all'interno del proprio sistema di riferimento locale e vengono
posizionate sulla scena attraverso opportune trasformazioni, quali omotetia, rotazione e traslazione.
3 La spline è una funzione costituita da un insieme di polinomi raccordati tra loro, il cui scopo è interpolare, in un intervallo, un insieme di punti (nodi), in modo tale che la funzione risulti continua almeno fino ad un dato ordine di derivate, in ogni punto dell'intervallo.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.15
Rendering
Il rendering è il processo di produzione dell'immagine finale a partire dal modello matematico
tramite cui si è pervenuti alla descrizione della scena: esistono numerosi algoritmi di rendering e
tutti implicano la proiezione dei modelli 3D su una superficie 2D.
Gli algoritmi di rendering si dividono in due categorie:
- Scanline renderers
Operano oggetto per oggetto, disegnando direttamente su schermo ogni poligono o
micropoligono: essi richiedono quindi che tutti gli oggetti (anche quelli modellati con curve
continue) siano stati sfaccettati in poligoni.
- Ray tracers.
Operano pixel per pixel, tracciando un raggio visuale immaginario dal punto di vista,
all'interno della scena, e determinando il colore del pixel dalle intersezioni con gli oggetti.
Uno degli aspetti principali della fase di rendering è legato alla determinazione della superficie
nascosta: gli algoritmi del tipo Ray tracers svolgono implicitamente questa funzione, determinando
il colore di un pixel in base all'intersezione del raggio visuale con il primo oggetto, mentre l’altra
tipologia di algoritmi richiede tecniche più avanzate per determinare quale poligono sia il più vicino
al punto di vista.
Il metodo più semplice è costituito dalla tecnica painter’s algorithm (algoritmo del pittore), la quale
consiste nel disegnare i poligoni a partire da quelli più lontani, in modo tale che quelli più vicini li
sovrascrivano; tuttavia tale tecnica risulta inefficace in caso di poligoni sovrapposti.
Per ovviare a tale problematica è stato sviluppato l’algoritmo z-buffering, che impiega un buffer4
per conservare la coordinata z relativa ad ogni pixel elaborato: se la profondità del pixel del
poligono che sta per essere elaborato è minore della profondità del pixel in memoria, il pixel viene
riscritto, altrimenti l'algoritmo passa al pixel successivo.
4 Per buffer si intende una zona di memoria usata temporaneamente per l'entrata o l'uscita dei dati, oppure per velocizzare l'esecuzione di alcune operazioni.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.16
Principali software di Computer Grafica 3D
A seguire si riporta una breve rassegna dei principali software di grafica 3D, attualmente in
circolazione, alcuni più, altri meno appropriati per :
AutoCAD – Autodesk
E’ il software più noto della famiglia Autodesk, specializzato nelle attività CAD: “Computer-Aided
Drafting” e “Computer-Aided Design”, ossia rispettivamente “disegno tecnico assistito
dall’elaboratore” e “progettazione assistita dall’elaboratore”. impiegato principalmente per la
produzione di disegni bi/tridimensionali in ambito ingegneristico, architettonico, meccanico ed
elettrotecnico.
AutoCAD Map 3D – Autodesk
E’ il software che coniuga le funzioni CAD di AutoCAD alla elaborazione delle cartografie e ai
lavori di GIS (Geographic Information System – sistema progettato per ricevere, immagazzinare,
elaborare, analizzare, gestire e rappresentare dati di tipo).
AutoCAD Civil 3D – Autodesk
E’ il software prettamente dedicato alla progettazione civile, con particolare riguardo per la
progettazione stradale: basti pensare che nell’ultima versione (2016) sono disponibili – per il
Country Kit italiano – sia il diagramma delle velocità, sia le verifiche dei tracciati, valutati
automaticamente rispetto alle prescrizioni della normativa italiana.
Maya – Autodesk
E’ probabilmente il programma più usato dagli studi di grafica di tutto il mondo. I punti di forza di
tale software sono: sistema di animazione e rigging (creazione dello scheletro di un corpo); motore
di rendering; sistema di particelle e dinamiche per la realizzazione di effetti speciali.
Sebbene il principale campo in cui risulta impiegato riguarda l’animazione e gli effetti speciali,
risulta adottato anche negli ambiti relativi a modellazione, illuminazione degli ambienti e creazione
di materiali per gli oggetti.
3ds Max – Autodesk
Altro software prodotto da Autodesk e largamente impiegato, specialmente in ambito videoludico
per la modellazione e animazione dei personaggi/oggetti da inserire poi all'interno di un gioco.
Rispetto a Maya, non risulta implementato per uno specifico ambito, per cui si adatta bene anche a
lavori relativi agli ambiti della modellazione, animazione o architettura.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.17
SketchUp
Differentemente dagli altri programmi menzionati che si contraddistinguono per professionalità,
questo software si contraddistingue per versatilità e facilità di utilizzo. La filosofia della casa madre
(Google) è basata sulla convinzione chela modellazione 3D debba essere condotta tramite strumenti
potenti ma anche utilizzabili da chiunque, quindi più intuitivi e “user friendly”. Trova largo impiego
nei settori legati a: progettazione architettonica; urbanistica; ingegneria civile; sviluppo di
videogiochi.
Cinema 4D
E’ divenuto molto popolare in virtù della semplicità di utilizzo e dell’interfaccia intuitiva.
Trova largamente spazio anche nel settore televisivo/pubblicitario.
Rhinoceros
Si tratta di un programma che ha funzioni relative alla sola modellazione. Viene normalmente
utilizzato per il disegno industriale, l'architettura, il design navale, il design del gioiello, il design
automobilistico.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.18
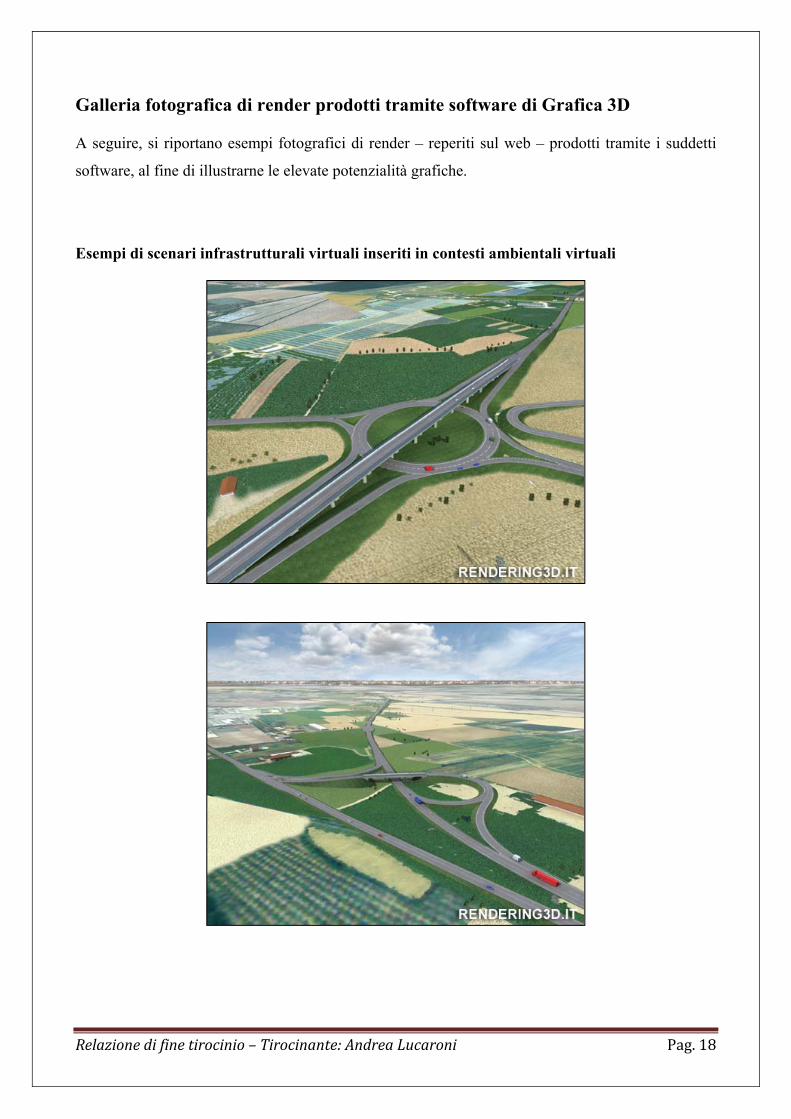
Galleria fotografica di render prodotti tramite software di Grafica 3D
A seguire, si riportano esempi fotografici di render – reperiti sul web – prodotti tramite i suddetti
software, al fine di illustrarne le elevate potenzialità grafiche.
Esempi di scenari infrastrutturali virtuali inseriti in contesti ambientali virtuali
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.19
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.20
Esempi di scenari infrastrutturali virtuali “fotoinseriti” in contesti ambientali reali
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.21
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.22
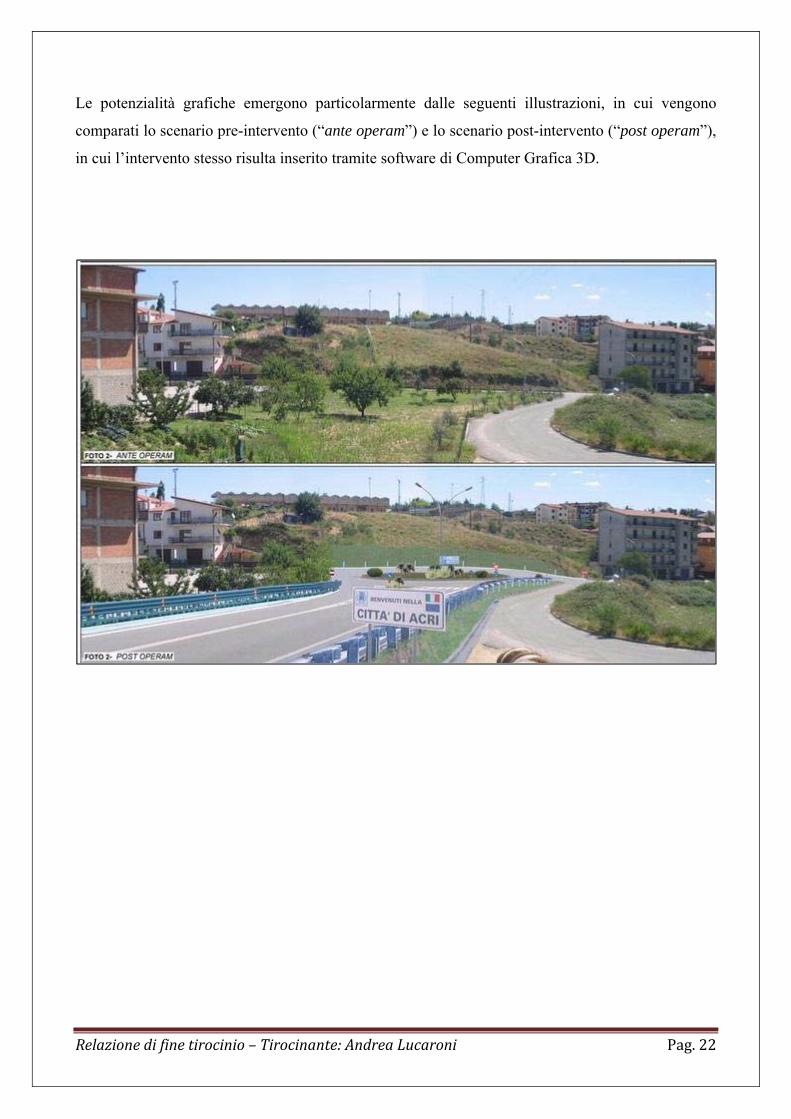
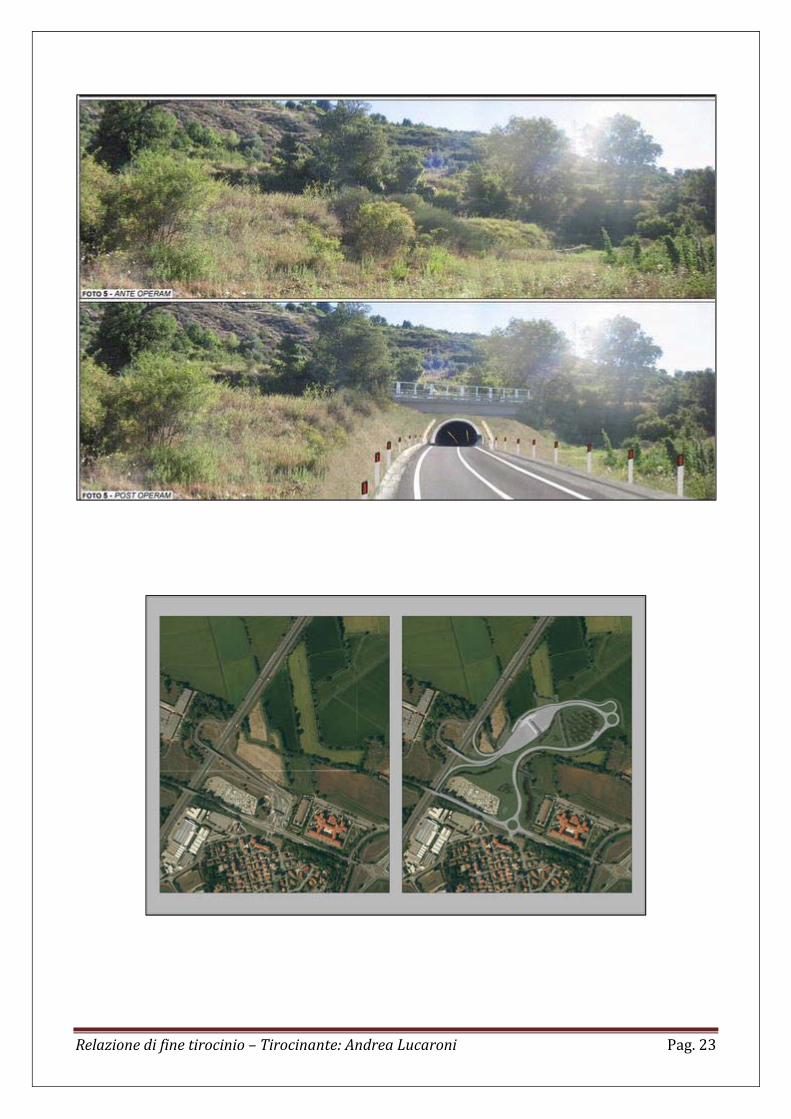
Le potenzialità grafiche emergono particolarmente dalle seguenti illustrazioni, in cui vengono
comparati lo scenario pre-intervento (“ante operam”) e lo scenario post-intervento (“post operam”),
in cui l’intervento stesso risulta inserito tramite software di Computer Grafica 3D.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.23
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.24
Applicazione delle conoscenze acquisite durante il percorso di tirocinio
A scopo puramente dimostrativo, si è scelto di applicare le conoscenze acquisite procedendo con la
modellazione tridimensionale di un singolo tronco di una delle infrastrutture di cui si compone la
maglia urbana della città di Fiumicino: Via della Foce Micina.
Tramite rilievi sul campo e il software Google Maps, si è proceduto con la redazione della sezione
tipo 2D del tronco preso in esame.
Tramite le funzioni 3D del software AutoCAD Map 3D, partendo dalla sezione 2D, si è pervenuti
alla modellazione tridimensionale del tronco in questione.
Il tutto è stato illustrato attraverso una serie di “screenshot” corredati di spiegazione delle
operazioni svolte.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.25
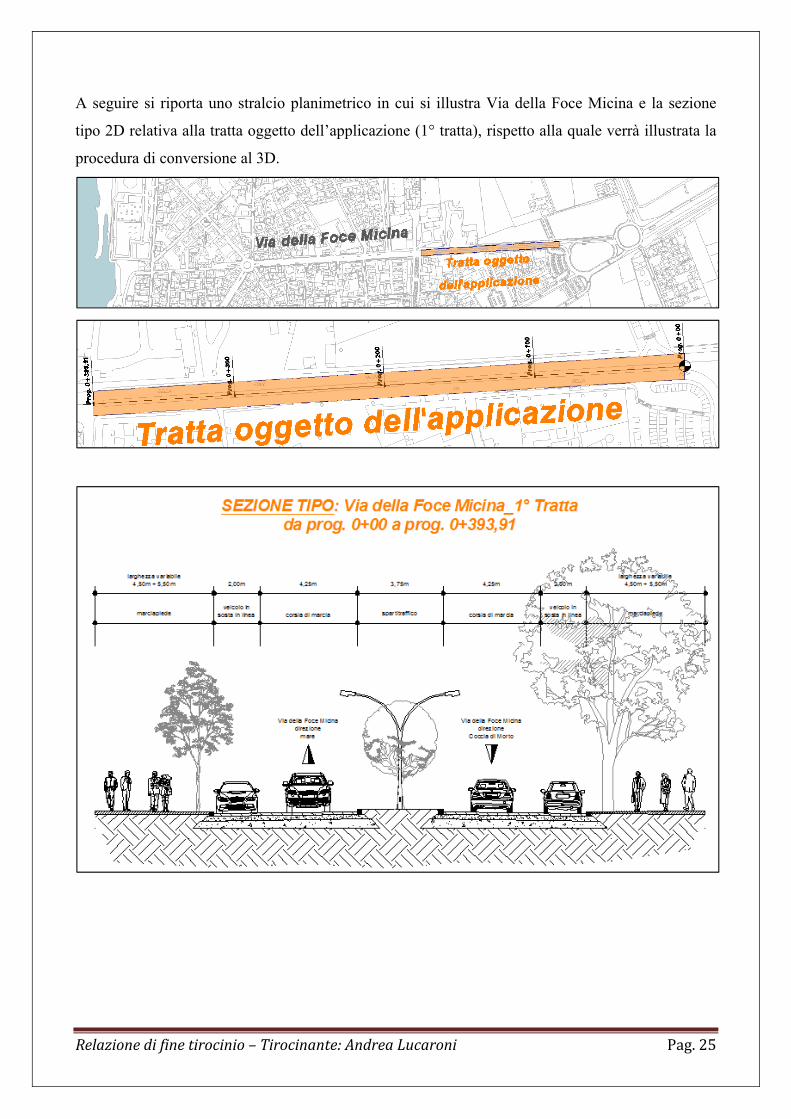
A seguire si riporta uno stralcio planimetrico in cui si illustra Via della Foce Micina e la sezione
tipo 2D relativa alla tratta oggetto dell’applicazione (1° tratta), rispetto alla quale verrà illustrata la
procedura di conversione al 3D.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.26
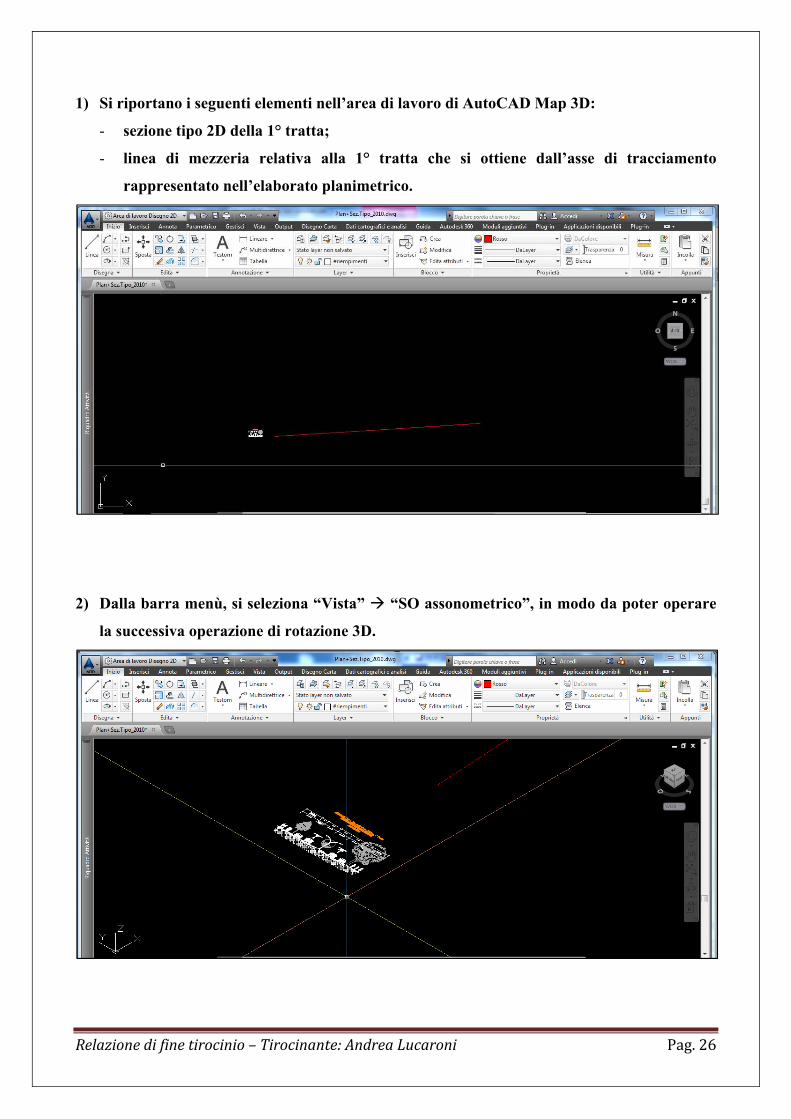
1) Si riportano i seguenti elementi nell’area di lavoro di AutoCAD Map 3D:
- sezione tipo 2D della 1° tratta;
- linea di mezzeria relativa alla 1° tratta che si ottiene dall’asse di tracciamento
rappresentato nell’elaborato planimetrico.
2) Dalla barra menù, si seleziona “Vista” “SO assonometrico”, in modo da poter operare
la successiva operazione di rotazione 3D.

Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.27
3) Si passa da “Area di lavoro Disegno 2D” a “Area di lavoro Map Classic” , per poter
eseguire l’operazione di rotazione 3D rispetto all’asse ‘y’:
“Edita” “Operazioni 3D” “Ruota 3D” Selezioniamo l’intera sezione 2D Si
seleziona il punto base (ad esempio, uno dei punti dell’asse di mezzeria della sezione stessa)
Si seleziona l’asse di rotazione cliccando sul cerchio corrispondente a tale asse (nel caso
specifico sul cerchio verde che rappresenta l’asse di rotazione ‘y’) Si digita l’angolo di
rotazione (90°).
Operata la rotazione, si sposta (con il comando “Sposta”) la linea di mezzeria, fissandola una
delle estremità in corrispondenza di uno dei punti della sezione 2D (ad esempio, uno dei punti
dell’asse di mezzeria della sezione stessa).
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.28
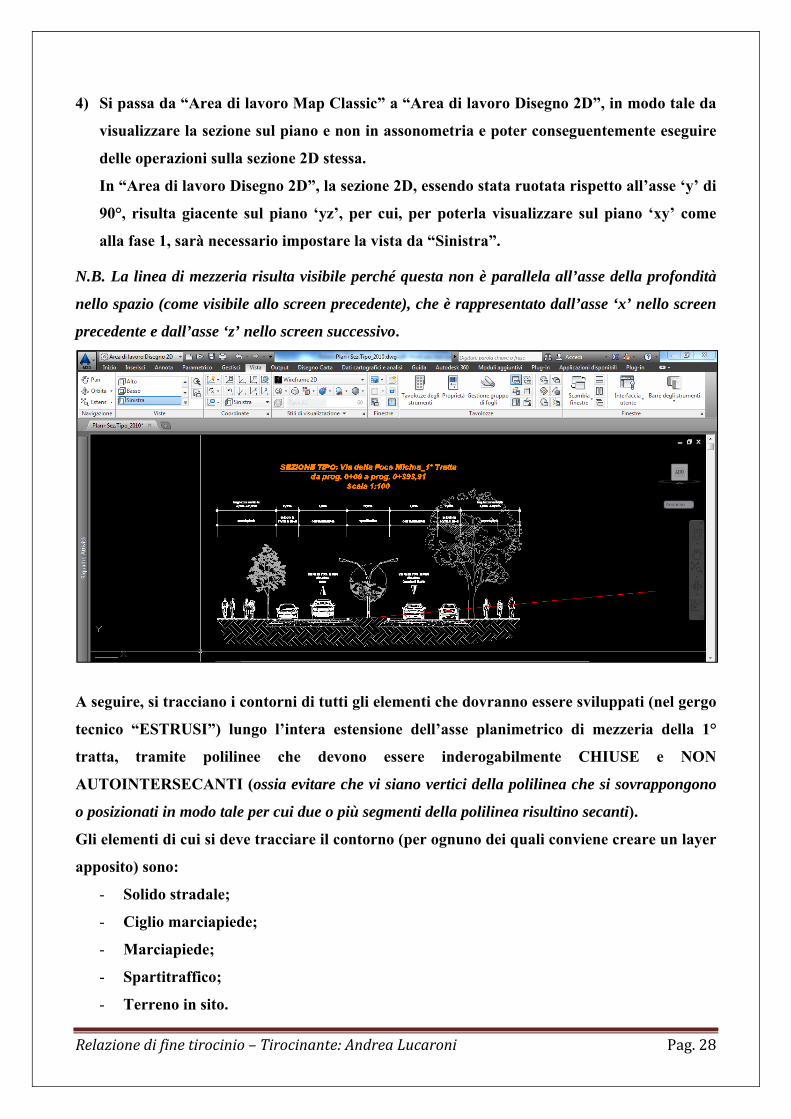
4) Si passa da “Area di lavoro Map Classic” a “Area di lavoro Disegno 2D”, in modo tale da
visualizzare la sezione sul piano e non in assonometria e poter conseguentemente eseguire
delle operazioni sulla sezione 2D stessa.
In “Area di lavoro Disegno 2D”, la sezione 2D, essendo stata ruotata rispetto all’asse ‘y’ di
90°, risulta giacente sul piano ‘yz’, per cui, per poterla visualizzare sul piano ‘xy’ come
alla fase 1, sarà necessario impostare la vista da “Sinistra”.
N.B. La linea di mezzeria risulta visibile perché questa non è parallela all’asse della profondità
nello spazio (come visibile allo screen precedente), che è rappresentato dall’asse ‘x’ nello screen
precedente e dall’asse ‘z’ nello screen successivo.
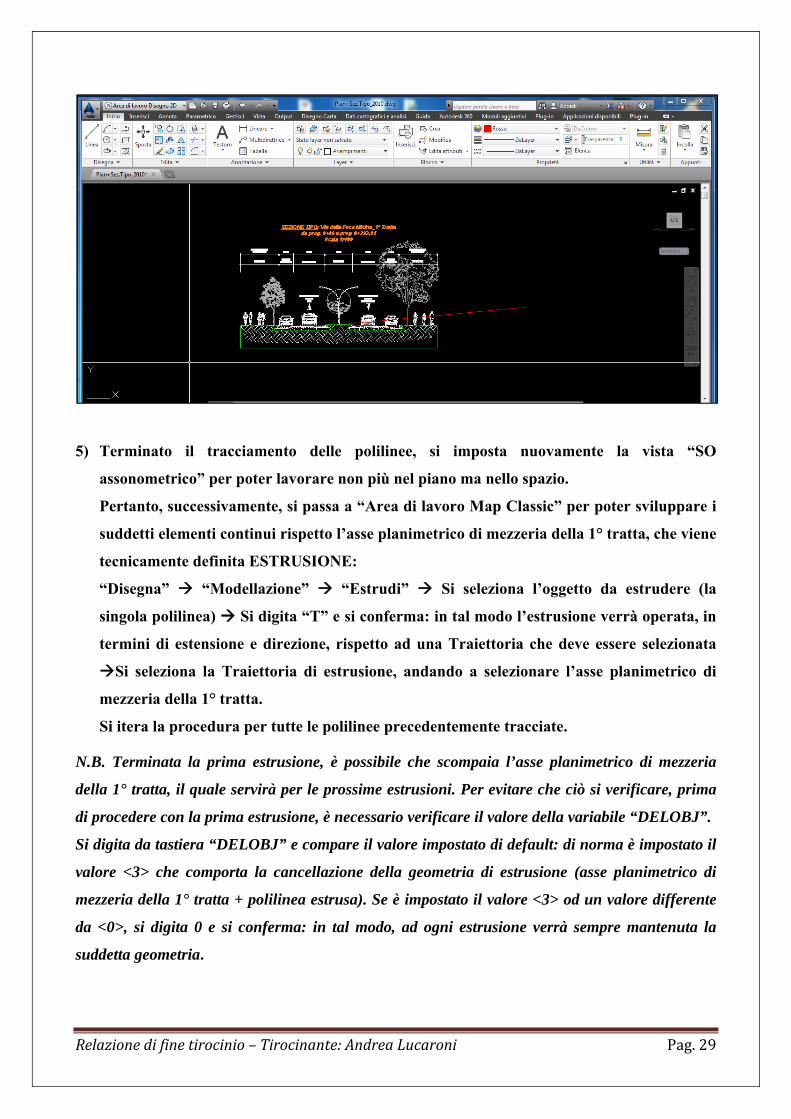
A seguire, si tracciano i contorni di tutti gli elementi che dovranno essere sviluppati (nel gergo
tecnico “ESTRUSI”) lungo l’intera estensione dell’asse planimetrico di mezzeria della 1°
tratta, tramite polilinee che devono essere inderogabilmente CHIUSE e NON
AUTOINTERSECANTI (ossia evitare che vi siano vertici della polilinea che si sovrappongono
o posizionati in modo tale per cui due o più segmenti della polilinea risultino secanti).
Gli elementi di cui si deve tracciare il contorno (per ognuno dei quali conviene creare un layer
apposito) sono:
- Solido stradale;
- Ciglio marciapiede;
- Marciapiede;
- Spartitraffico;
- Terreno in sito.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.29
5) Terminato il tracciamento delle polilinee, si imposta nuovamente la vista “SO
assonometrico” per poter lavorare non più nel piano ma nello spazio.
Pertanto, successivamente, si passa a “Area di lavoro Map Classic” per poter sviluppare i
suddetti elementi continui rispetto l’asse planimetrico di mezzeria della 1° tratta, che viene
tecnicamente definita ESTRUSIONE:
“Disegna” “Modellazione” “Estrudi” Si seleziona l’oggetto da estrudere (la
singola polilinea) Si digita “T” e si conferma: in tal modo l’estrusione verrà operata, in
termini di estensione e direzione, rispetto ad una Traiettoria che deve essere selezionata
Si seleziona la Traiettoria di estrusione, andando a selezionare l’asse planimetrico di
mezzeria della 1° tratta.
Si itera la procedura per tutte le polilinee precedentemente tracciate.
N.B. Terminata la prima estrusione, è possibile che scompaia l’asse planimetrico di mezzeria
della 1° tratta, il quale servirà per le prossime estrusioni. Per evitare che ciò si verificare, prima
di procedere con la prima estrusione, è necessario verificare il valore della variabile “DELOBJ”.
Si digita da tastiera “DELOBJ” e compare il valore impostato di default: di norma è impostato il
valore <3> che comporta la cancellazione della geometria di estrusione (asse planimetrico di
mezzeria della 1° tratta + polilinea estrusa). Se è impostato il valore <3> od un valore differente
da <0>, si digita 0 e si conferma: in tal modo, ad ogni estrusione verrà sempre mantenuta la
suddetta geometria.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.30
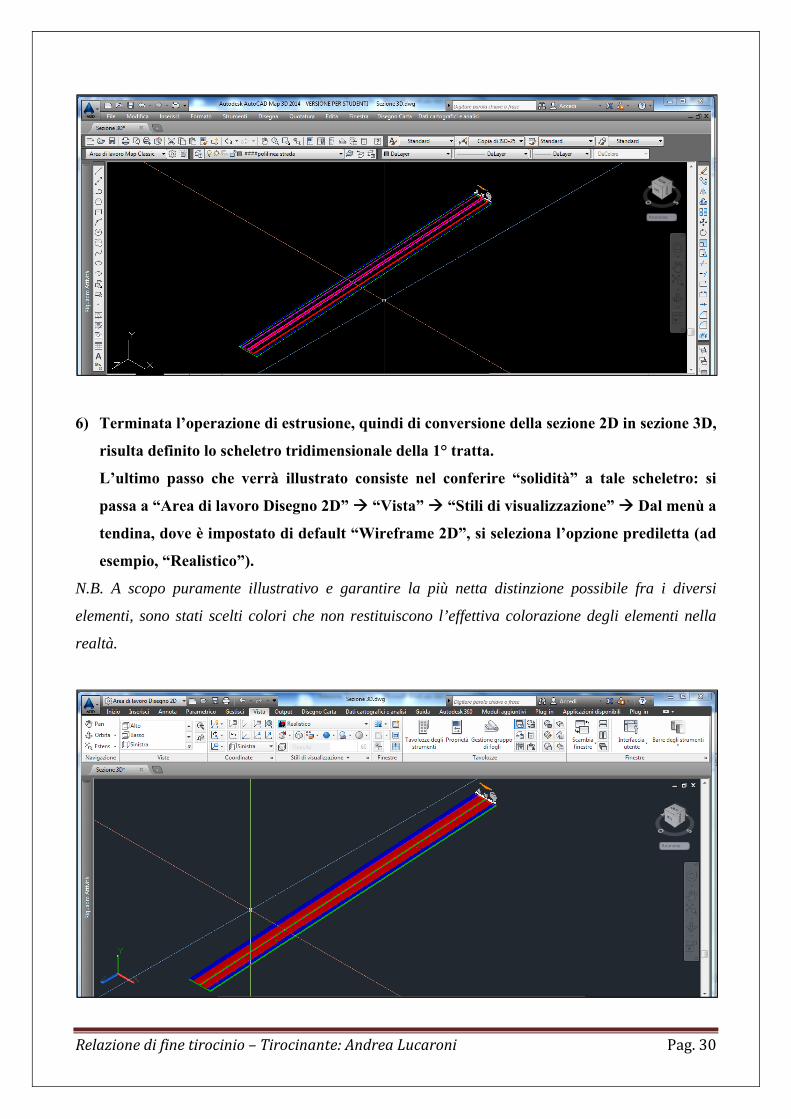
6) Terminata l’operazione di estrusione, quindi di conversione della sezione 2D in sezione 3D,
risulta definito lo scheletro tridimensionale della 1° tratta.
L’ultimo passo che verrà illustrato consiste nel conferire “solidità” a tale scheletro: si
passa a “Area di lavoro Disegno 2D” “Vista” “Stili di visualizzazione” Dal menù a
tendina, dove è impostato di default “Wireframe 2D”, si seleziona l’opzione prediletta (ad
esempio, “Realistico”).
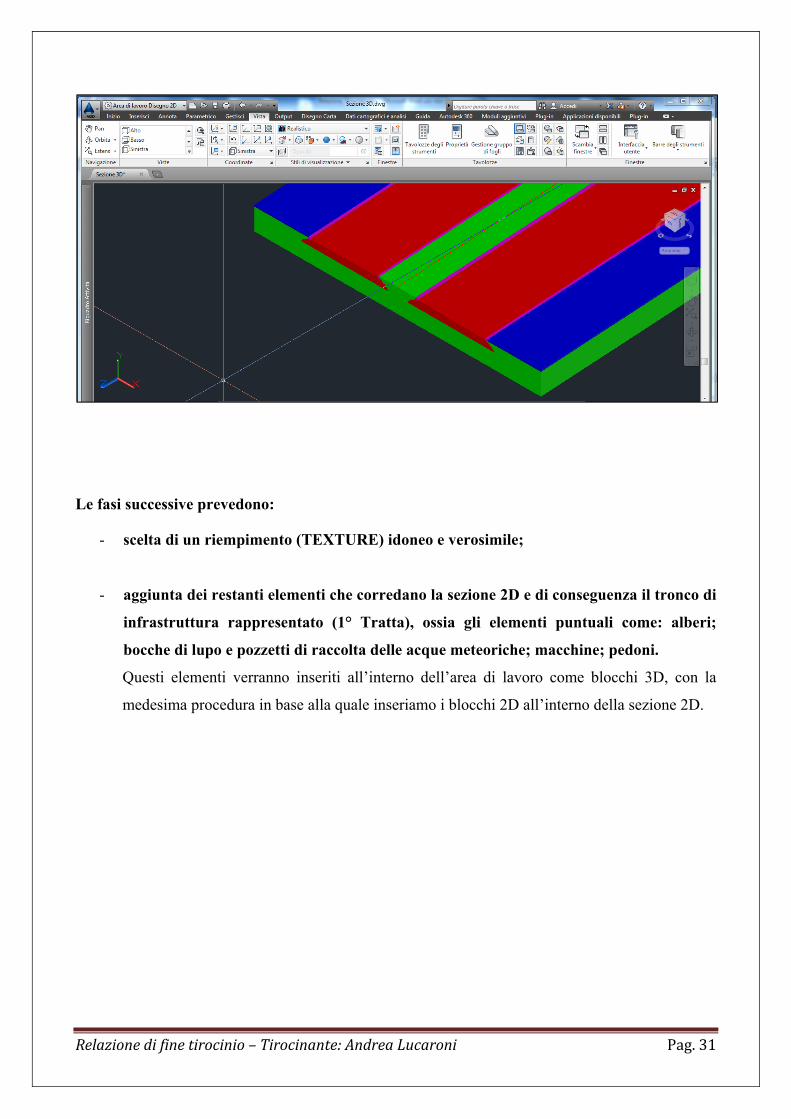
N.B. A scopo puramente illustrativo e garantire la più netta distinzione possibile fra i diversi
elementi, sono stati scelti colori che non restituiscono l’effettiva colorazione degli elementi nella
realtà.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.31
Le fasi successive prevedono:
- scelta di un riempimento (TEXTURE) idoneo e verosimile;
- aggiunta dei restanti elementi che corredano la sezione 2D e di conseguenza il tronco di
infrastruttura rappresentato (1° Tratta), ossia gli elementi puntuali come: alberi;
bocche di lupo e pozzetti di raccolta delle acque meteoriche; macchine; pedoni.
Questi elementi verranno inseriti all’interno dell’area di lavoro come blocchi 3D, con la
medesima procedura in base alla quale inseriamo i blocchi 2D all’interno della sezione 2D.
Relazionedifinetirocinio–Tirocinante:AndreaLucaroni Pag.32
Conclusioni
Al termine del percorso di tirocinio, è possibile affermare che sono stati raggiunti gli obiettivi
prefissati, ossia sono state acquisite competenze ed abilità informatiche tali da garantire l’utilizzo
delle funzioni 3D dei software CAD di Autodesk e procedere con le operazioni basilari e
fondamentali di modellazione tridimensionale dei progetti infrastrutturali.
Come è possibile constatare dagli esempi di render e dagli screen riportati, emerge l’elevata
verosimiglianza degli elaborati prodotti, da cui scaturiscono due indiscutibili vantaggi:
1) Si favorisce l’inserimento dell’utente nello scenario virtuale di guida, il che, di conseguenza,
favorisce l’assunzione, da parte dell’utente stesso, di comportamenti prossimi a quelli reali
(il che garantisce una più attendibile stima del parametro dell’incidentalità attesa, con effetti
positivi che si ripercuotono a cascata sulla progettazione e, conseguentemente, sui costi
umani-sociali-economici sostenuti dallo Stato);
2) Rappresentazione chiara ed inequivocabile dei progetti infrastrutturali, di notevole supporto
ai tradizionali elaborati grafici prodotti.