removing impulsive noise
DESCRIPTION
IEEETRANSCRIPT
IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 12, NO. 1, JANUARY 2003 85
Selective Removal of Impulse Noise Based onHomogeneity Level Information
Gouchol Pok, Jyh-Charn Liu, and Attoor Sanju Nair
Abstract—In this paper, we propose a decision-based, signal-adaptive median filtering algorithm for removal of impulse noise.Our algorithm achieves accurate noise detection and high SNRmeasures without smearing the fine details and edges in the image.The notion of homogeneity levelis defined for pixel values basedon their global and local statistical properties. The cooccurrencematrix technique is used to represent the correlations between apixel and its neighbors, and to derive the upper and lower bound ofthe homogeneity level. Noise detection is performed at two stages:noise candidates are first selected using the homogeneity level, andthen a refining process follows to eliminate false detections. Thenoise detection scheme does not use a quantitative decision mea-sure, but uses qualitative structural information, and it is not sub-ject to burdensome computations for optimization of the thresholdvalues. Empirical results indicate that our scheme performs signif-icantly better than other median filters, in terms of noise suppres-sion and detail preservation.
Index Terms—Adaptive median filter, cooccurrence matrix, ho-mogeneity level, impulse noise.
I. INTRODUCTION
M EDIAN filter is a nonlinear filtering technique widelyused for removal of impulse noise [2], [6], [10]. Despite
its effectiveness in smoothing noise, the median filter tends toremove fine details when it is applied to an image uniformly.To address this drawback, a number of modified median fil-ters have been proposed, e.g., minimum–maximum exclusivemean (MMEM) filter [7], prescanned minmax center-weighted(PMCW) filter [14], and decision-based median filters [4], [5],[8], [13]. In these methods, the filtering operation adapts tothe local properties and structures in the image. In the deci-sion-based filtering, for example, image pixels are first classi-fied ascorruptedanduncorrupted, and then passed through themedian and identity filters, respectively. The main issue of thedecision-based filter lies in building a decision rule, or a noisemeasure, that can discriminate the uncorrupted pixels from thecorrupted ones as precisely as possible.
In the method proposed by Hanet al. [7], pixels that havevalues close to the maximum and minimum in a filter windoware discarded, and the average of remaining pixels in the
Manuscript received February 13, 2001; revised May 1, 2002. The associateeditor coordinating the review of this manuscript and approving it for publica-tion was Prof. Uday B. Desai.
G. Pok is with the Department of Computer Science, Yanbian University,Yanji, China (e-mail: [email protected]).
J.-C. Liu is with the Department of Computer Science, Texas A&M Univer-sity, College Station, TX 77843 USA (e-mail: [email protected]).
A. S. Nair is with the Department of Electrical Engineering, Texas A&MUniversity, College Station, TX 77843 USA (e-mail: [email protected]).
Digital Object Identifier 10.1109/TIP.2002.804278
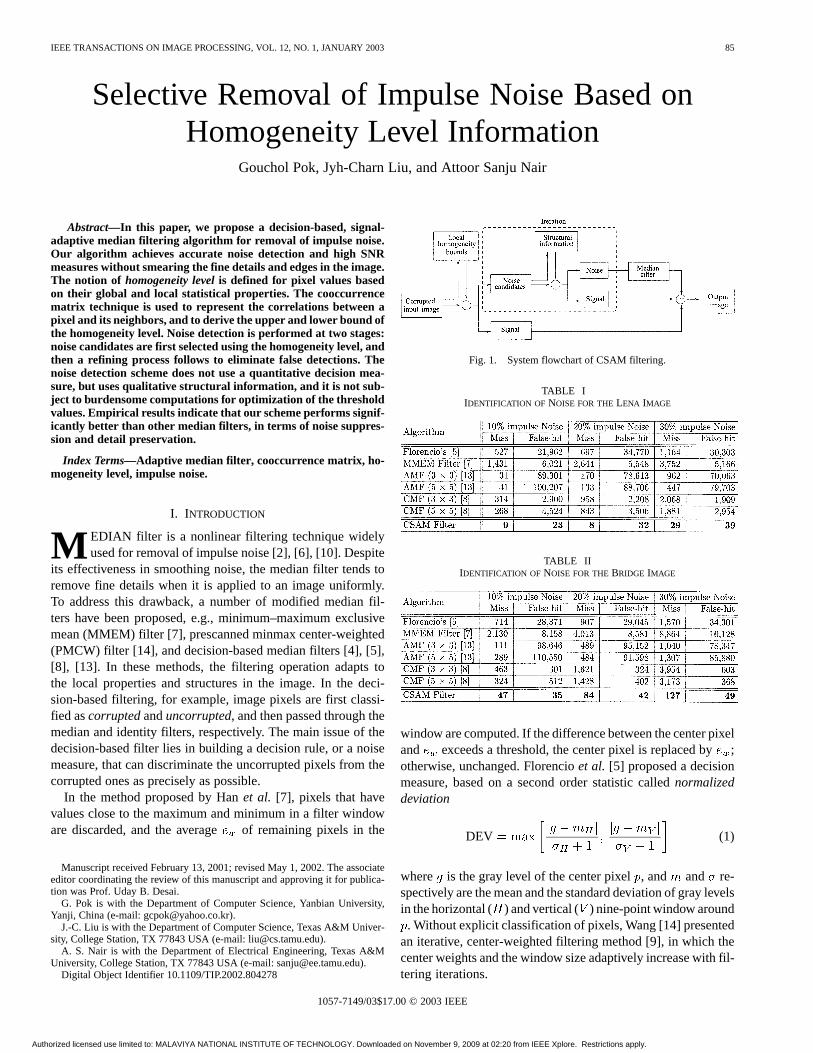
Fig. 1. System flowchart of CSAM filtering.
TABLE IIDENTIFICATION OF NOISE FOR THELENA IMAGE
TABLE IIIDENTIFICATION OF NOISE FOR THEBRIDGE IMAGE
window are computed. If the difference between the center pixeland exceeds a threshold, the center pixel is replaced by;otherwise, unchanged. Florencioet al. [5] proposed a decisionmeasure, based on a second order statistic callednormalizeddeviation
DEV (1)
where is the gray level of the center pixel, and and re-spectively are the mean and the standard deviation of gray levelsin the horizontal ( ) and vertical ( ) nine-point window around. Without explicit classification of pixels, Wang [14] presented
an iterative, center-weighted filtering method [9], in which thecenter weights and the window size adaptively increase with fil-tering iterations.
1057-7149/03$17.00 © 2003 IEEE
Authorized licensed use limited to: MALAVIYA NATIONAL INSTITUTE OF TECHNOLOGY. Downloaded on November 9, 2009 at 02:20 from IEEE Xplore. Restrictions apply.
86 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 12, NO. 1, JANUARY 2003
(a) (b)
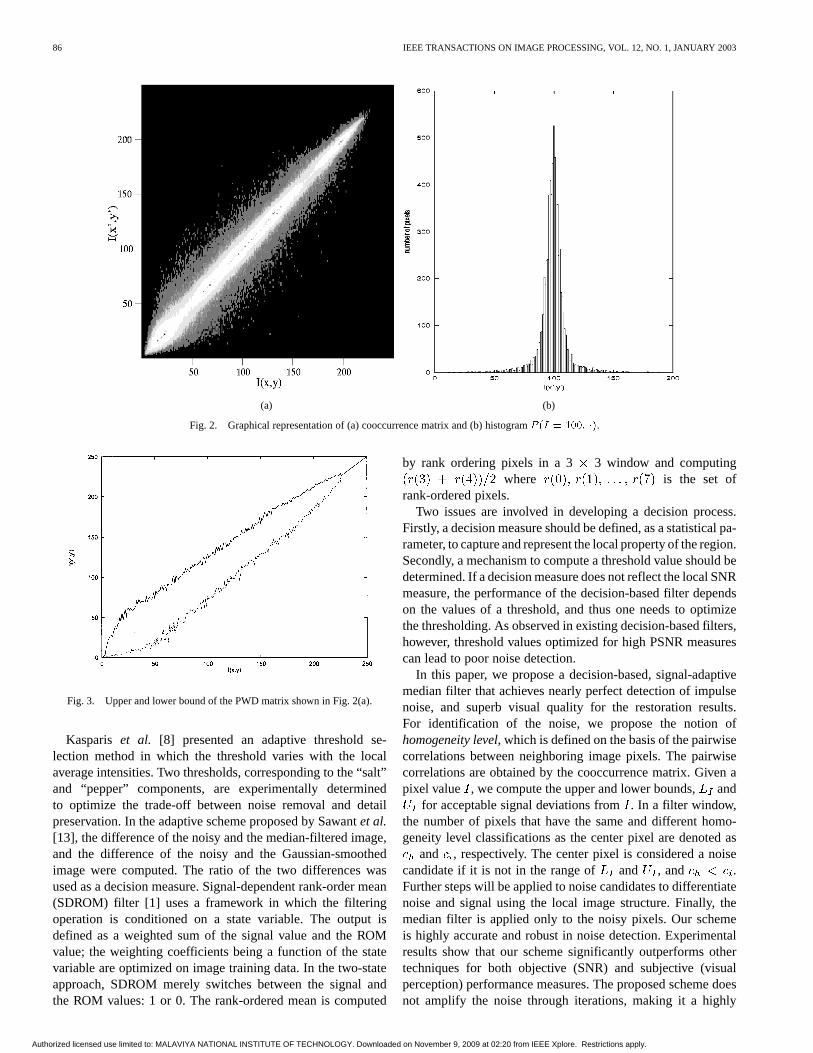
Fig. 2. Graphical representation of (a) cooccurrence matrix and (b) histogramP (I = 100; �).
Fig. 3. Upper and lower bound of the PWD matrix shown in Fig. 2(a).
Kasparis et al. [8] presented an adaptive threshold se-lection method in which the threshold varies with the localaverage intensities. Two thresholds, corresponding to the “salt”and “pepper” components, are experimentally determinedto optimize the trade-off between noise removal and detailpreservation. In the adaptive scheme proposed by Sawantet al.[13], the difference of the noisy and the median-filtered image,and the difference of the noisy and the Gaussian-smoothedimage were computed. The ratio of the two differences wasused as a decision measure. Signal-dependent rank-order mean(SDROM) filter [1] uses a framework in which the filteringoperation is conditioned on a state variable. The output isdefined as a weighted sum of the signal value and the ROMvalue; the weighting coefficients being a function of the statevariable are optimized on image training data. In the two-stateapproach, SDROM merely switches between the signal andthe ROM values: 1 or 0. The rank-ordered mean is computed
by rank ordering pixels in a 3 3 window and computingwhere is the set of
rank-ordered pixels.Two issues are involved in developing a decision process.
Firstly, a decision measure should be defined, as a statistical pa-rameter, to capture and represent the local property of the region.Secondly, a mechanism to compute a threshold value should bedetermined. If a decision measure does not reflect the local SNRmeasure, the performance of the decision-based filter dependson the values of a threshold, and thus one needs to optimizethe thresholding. As observed in existing decision-based filters,however, threshold values optimized for high PSNR measurescan lead to poor noise detection.
In this paper, we propose a decision-based, signal-adaptivemedian filter that achieves nearly perfect detection of impulsenoise, and superb visual quality for the restoration results.For identification of the noise, we propose the notion ofhomogeneity level, which is defined on the basis of the pairwisecorrelations between neighboring image pixels. The pairwisecorrelations are obtained by the cooccurrence matrix. Given apixel value , we compute the upper and lower bounds,and
for acceptable signal deviations from. In a filter window,the number of pixels that have the same and different homo-geneity level classifications as the center pixel are denoted as
and , respectively. The center pixel is considered a noisecandidate if it is not in the range of and , and .Further steps will be applied to noise candidates to differentiatenoise and signal using the local image structure. Finally, themedian filter is applied only to the noisy pixels. Our schemeis highly accurate and robust in noise detection. Experimentalresults show that our scheme significantly outperforms othertechniques for both objective (SNR) and subjective (visualperception) performance measures. The proposed scheme doesnot amplify the noise through iterations, making it a highly
Authorized licensed use limited to: MALAVIYA NATIONAL INSTITUTE OF TECHNOLOGY. Downloaded on November 9, 2009 at 02:20 from IEEE Xplore. Restrictions apply.
POK et al.: SELECTIVE REMOVAL OF IMPULSE NOISE BASED ON HOMOGENEITY LEVEL INFORMATION 87
(a) (b)
(c) (d)
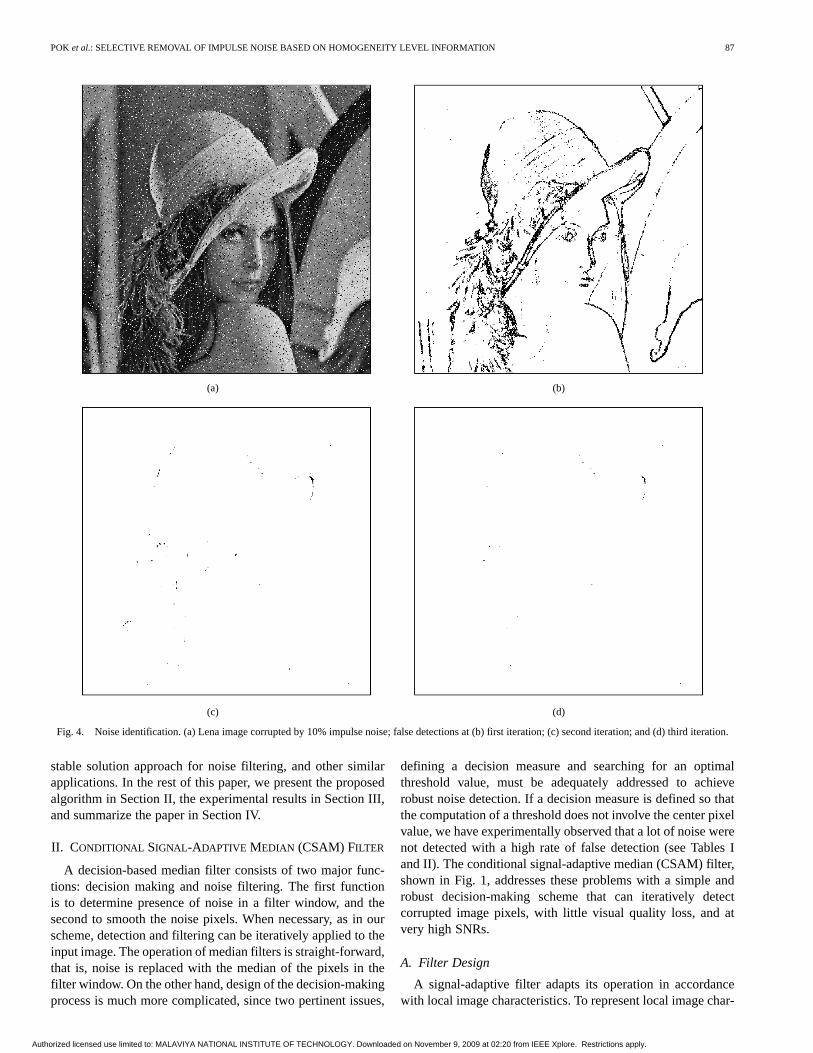
Fig. 4. Noise identification. (a) Lena image corrupted by 10% impulse noise; false detections at (b) first iteration; (c) second iteration; and (d) third iteration.
stable solution approach for noise filtering, and other similarapplications. In the rest of this paper, we present the proposedalgorithm in Section II, the experimental results in Section III,and summarize the paper in Section IV.
II. CONDITIONAL SIGNAL-ADAPTIVE MEDIAN (CSAM) FILTER
A decision-based median filter consists of two major func-tions: decision making and noise filtering. The first functionis to determine presence of noise in a filter window, and thesecond to smooth the noise pixels. When necessary, as in ourscheme, detection and filtering can be iteratively applied to theinput image. The operation of median filters is straight-forward,that is, noise is replaced with the median of the pixels in thefilter window. On the other hand, design of the decision-makingprocess is much more complicated, since two pertinent issues,
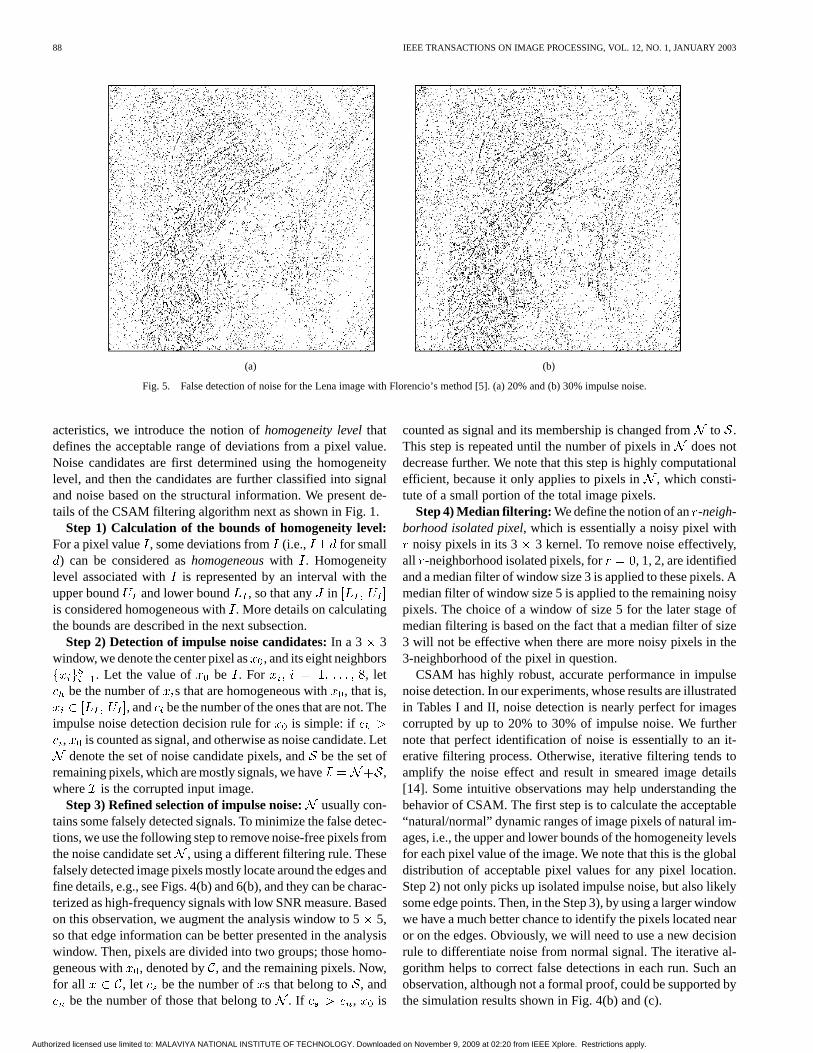
defining a decision measure and searching for an optimalthreshold value, must be adequately addressed to achieverobust noise detection. If a decision measure is defined so thatthe computation of a threshold does not involve the center pixelvalue, we have experimentally observed that a lot of noise werenot detected with a high rate of false detection (see Tables Iand II). The conditional signal-adaptive median (CSAM) filter,shown in Fig. 1, addresses these problems with a simple androbust decision-making scheme that can iteratively detectcorrupted image pixels, with little visual quality loss, and atvery high SNRs.
A. Filter Design
A signal-adaptive filter adapts its operation in accordancewith local image characteristics. To represent local image char-
Authorized licensed use limited to: MALAVIYA NATIONAL INSTITUTE OF TECHNOLOGY. Downloaded on November 9, 2009 at 02:20 from IEEE Xplore. Restrictions apply.
88 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 12, NO. 1, JANUARY 2003
(a) (b)
Fig. 5. False detection of noise for the Lena image with Florencio’s method [5]. (a) 20% and (b) 30% impulse noise.
acteristics, we introduce the notion ofhomogeneity levelthatdefines the acceptable range of deviations from a pixel value.Noise candidates are first determined using the homogeneitylevel, and then the candidates are further classified into signaland noise based on the structural information. We present de-tails of the CSAM filtering algorithm next as shown in Fig. 1.
Step 1) Calculation of the bounds of homogeneity level:For a pixel value , some deviations from (i.e., for small) can be considered ashomogeneouswith . Homogeneity
level associated with is represented by an interval with theupper bound and lower bound , so that any inis considered homogeneous with. More details on calculatingthe bounds are described in the next subsection.
Step 2) Detection of impulse noise candidates:In a 3 3window, we denote the center pixel as, and its eight neighbors
. Let the value of be . For , letbe the number of s that are homogeneous with, that is,
, and be the number of the ones that are not. Theimpulse noise detection decision rule for is simple: if
, is counted as signal, and otherwise as noise candidate. Letdenote the set of noise candidate pixels, andbe the set of
remaining pixels, which are mostly signals, we have ,where is the corrupted input image.
Step 3) Refined selection of impulse noise: usually con-tains some falsely detected signals. To minimize the false detec-tions, we use the following step to remove noise-free pixels fromthe noise candidate set, using a different filtering rule. Thesefalsely detected image pixels mostly locate around the edges andfine details, e.g., see Figs. 4(b) and 6(b), and they can be charac-terized as high-frequency signals with low SNR measure. Basedon this observation, we augment the analysis window to 55,so that edge information can be better presented in the analysiswindow. Then, pixels are divided into two groups; those homo-geneous with , denoted by , and the remaining pixels. Now,for all , let be the number of s that belong to , and
be the number of those that belong to. If , is
counted as signal and its membership is changed fromto .This step is repeated until the number of pixels indoes notdecrease further. We note that this step is highly computationalefficient, because it only applies to pixels in, which consti-tute of a small portion of the total image pixels.
Step 4) Median filtering: We define the notion of an-neigh-borhood isolated pixel, which is essentially a noisy pixel with
noisy pixels in its 3 3 kernel. To remove noise effectively,all -neighborhood isolated pixels, for , 1, 2, are identifiedand a median filter of window size 3 is applied to these pixels. Amedian filter of window size 5 is applied to the remaining noisypixels. The choice of a window of size 5 for the later stage ofmedian filtering is based on the fact that a median filter of size3 will not be effective when there are more noisy pixels in the3-neighborhood of the pixel in question.
CSAM has highly robust, accurate performance in impulsenoise detection. In our experiments, whose results are illustratedin Tables I and II, noise detection is nearly perfect for imagescorrupted by up to 20% to 30% of impulse noise. We furthernote that perfect identification of noise is essentially to an it-erative filtering process. Otherwise, iterative filtering tends toamplify the noise effect and result in smeared image details[14]. Some intuitive observations may help understanding thebehavior of CSAM. The first step is to calculate the acceptable“natural/normal” dynamic ranges of image pixels of natural im-ages, i.e., the upper and lower bounds of the homogeneity levelsfor each pixel value of the image. We note that this is the globaldistribution of acceptable pixel values for any pixel location.Step 2) not only picks up isolated impulse noise, but also likelysome edge points. Then, in the Step 3), by using a larger windowwe have a much better chance to identify the pixels located nearor on the edges. Obviously, we will need to use a new decisionrule to differentiate noise from normal signal. The iterative al-gorithm helps to correct false detections in each run. Such anobservation, although not a formal proof, could be supported bythe simulation results shown in Fig. 4(b) and (c).
Authorized licensed use limited to: MALAVIYA NATIONAL INSTITUTE OF TECHNOLOGY. Downloaded on November 9, 2009 at 02:20 from IEEE Xplore. Restrictions apply.
POK et al.: SELECTIVE REMOVAL OF IMPULSE NOISE BASED ON HOMOGENEITY LEVEL INFORMATION 89
(a) (b)
(c) (d)
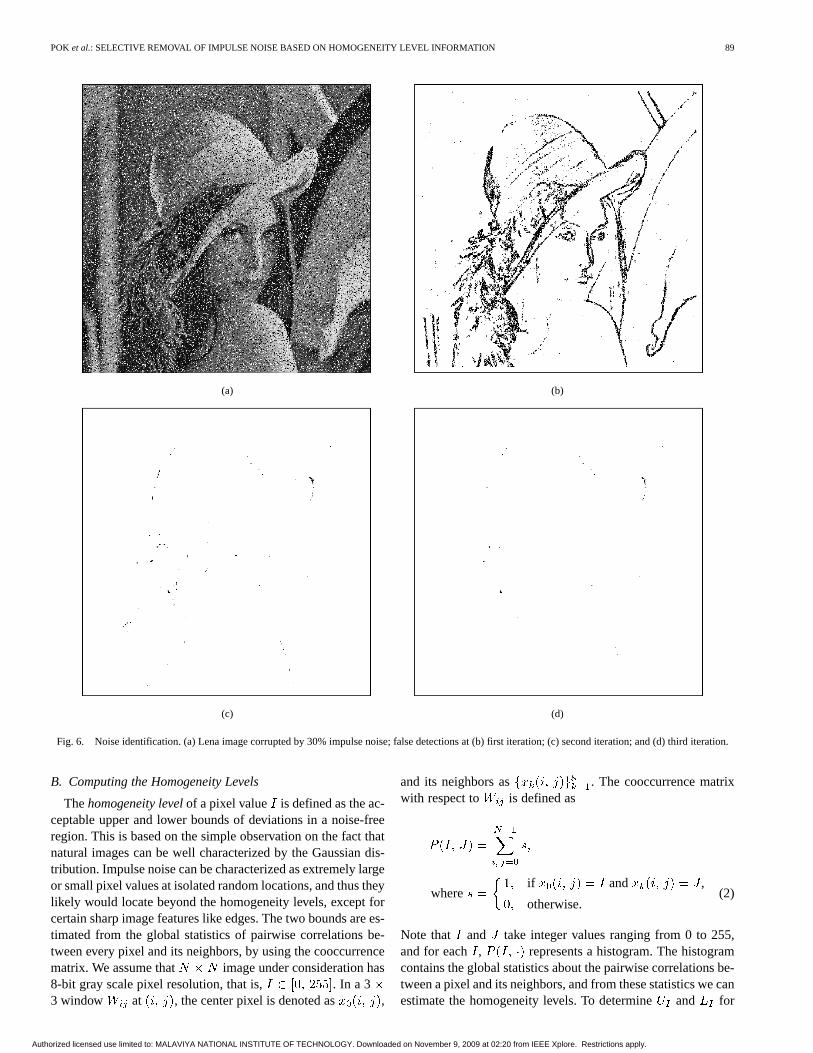
Fig. 6. Noise identification. (a) Lena image corrupted by 30% impulse noise; false detections at (b) first iteration; (c) second iteration; and (d) third iteration.
B. Computing the Homogeneity Levels
Thehomogeneity levelof a pixel value is defined as the ac-ceptable upper and lower bounds of deviations in a noise-freeregion. This is based on the simple observation on the fact thatnatural images can be well characterized by the Gaussian dis-tribution. Impulse noise can be characterized as extremely largeor small pixel values at isolated random locations, and thus theylikely would locate beyond the homogeneity levels, except forcertain sharp image features like edges. The two bounds are es-timated from the global statistics of pairwise correlations be-tween every pixel and its neighbors, by using the cooccurrencematrix. We assume that image under consideration has8-bit gray scale pixel resolution, that is, . In a 33 window at , the center pixel is denoted as ,
and its neighbors as . The cooccurrence matrixwith respect to is defined as
whereif and ,
otherwise.(2)
Note that and take integer values ranging from 0 to 255,and for each , represents a histogram. The histogramcontains the global statistics about the pairwise correlations be-tween a pixel and its neighbors, and from these statistics we canestimate the homogeneity levels. To determineand for
Authorized licensed use limited to: MALAVIYA NATIONAL INSTITUTE OF TECHNOLOGY. Downloaded on November 9, 2009 at 02:20 from IEEE Xplore. Restrictions apply.
90 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 12, NO. 1, JANUARY 2003
(a) (b)
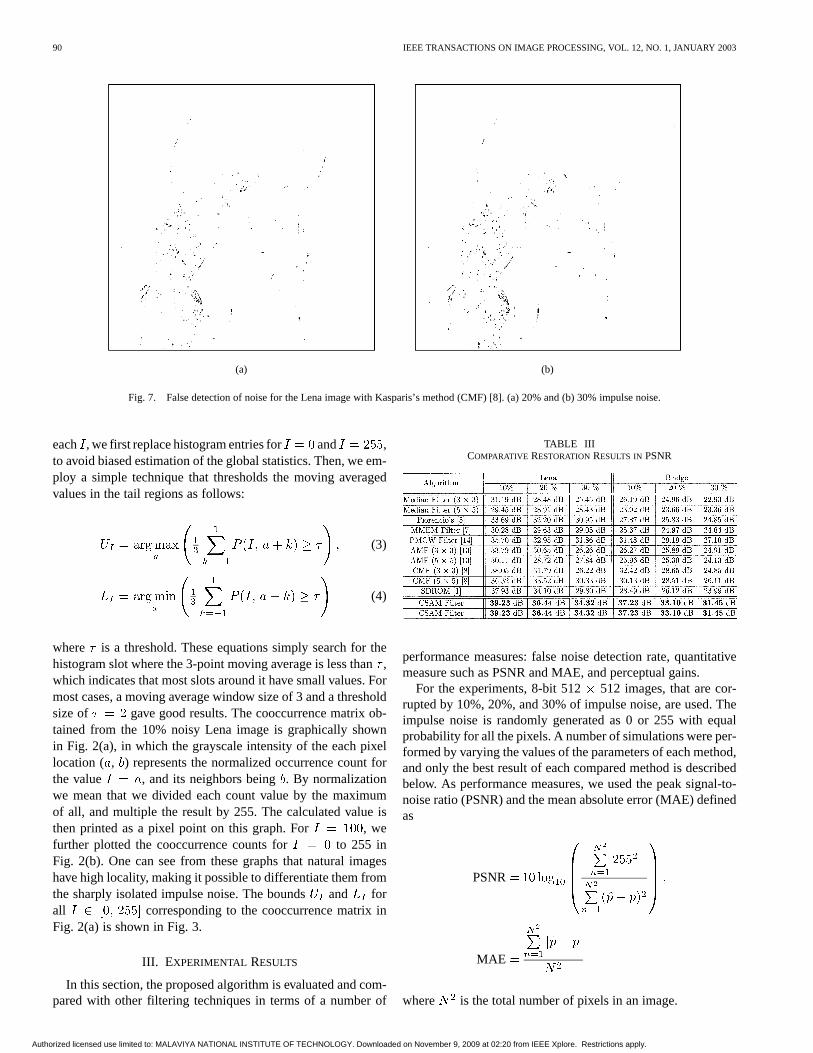
Fig. 7. False detection of noise for the Lena image with Kasparis’s method (CMF) [8]. (a) 20% and (b) 30% impulse noise.
each , we first replace histogram entries for and ,to avoid biased estimation of the global statistics. Then, we em-ploy a simple technique that thresholds the moving averagedvalues in the tail regions as follows:
(3)
(4)
where is a threshold. These equations simply search for thehistogram slot where the 3-point moving average is less than,which indicates that most slots around it have small values. Formost cases, a moving average window size of 3 and a thresholdsize of gave good results. The cooccurrence matrix ob-tained from the 10% noisy Lena image is graphically shownin Fig. 2(a), in which the grayscale intensity of the each pixellocation ( , ) represents the normalized occurrence count forthe value , and its neighbors being. By normalizationwe mean that we divided each count value by the maximumof all, and multiple the result by 255. The calculated value isthen printed as a pixel point on this graph. For , wefurther plotted the cooccurrence counts for to 255 inFig. 2(b). One can see from these graphs that natural imageshave high locality, making it possible to differentiate them fromthe sharply isolated impulse noise. The boundsand forall corresponding to the cooccurrence matrix inFig. 2(a) is shown in Fig. 3.
III. EXPERIMENTAL RESULTS
In this section, the proposed algorithm is evaluated and com-pared with other filtering techniques in terms of a number of
TABLE IIICOMPARATIVE RESTORATIONRESULTS IN PSNR
performance measures: false noise detection rate, quantitativemeasure such as PSNR and MAE, and perceptual gains.
For the experiments, 8-bit 512 512 images, that are cor-rupted by 10%, 20%, and 30% of impulse noise, are used. Theimpulse noise is randomly generated as 0 or 255 with equalprobability for all the pixels. A number of simulations were per-formed by varying the values of the parameters of each method,and only the best result of each compared method is describedbelow. As performance measures, we used the peak signal-to-noise ratio (PSNR) and the mean absolute error (MAE) definedas
PSNR
MAE
where is the total number of pixels in an image.
Authorized licensed use limited to: MALAVIYA NATIONAL INSTITUTE OF TECHNOLOGY. Downloaded on November 9, 2009 at 02:20 from IEEE Xplore. Restrictions apply.

POK et al.: SELECTIVE REMOVAL OF IMPULSE NOISE BASED ON HOMOGENEITY LEVEL INFORMATION 91
(a) (b)
(c) (d)
Fig. 8. Restoration results for (a) 10% and (b) 30% impulse noise Lena image, and (c) 10% and (d) 30% impulse noise bridge image.
One important characteristic of the CSAM filter is that it candetect almost all noise while false noise detection is very low,as illustrated in Figs. 4–7.
In Tables I and II, “miss” refers to number of noisy pixels thatwere not detected, and “false-hit” refers to the number of signalpixels misclassified as noise. Compared with other techniques,the CSAM filter performs better in identifying the noisy pixels.It makes an iterative filtering scheme operate properly withoutthe noise amplification effect.
The CSAM filter also outperforms other techniques for theperformance measured in PSNR and the perceptual quality. Re-ferring to Table III, the proposed CSAM filter achieved signif-
icant improvement over other techniques, ranging from 2.3 dBto 8.3 dB in PSNR.
IV. CONCLUSION
In this paper, we presented a new framework for the removalof impulse noise in which filtering operation is selectively ap-plied to the pixels that are classified as corrupted. The novelfeature of the algorithm lies in introducing the notion of homo-geneity level that is used for computing the signal-adaptive andflexible thresholds. In addition to that, structural information isalso applied to maximize the true detection rate. We have shownexperimentally that the proposed algorithm significantly outper-
Authorized licensed use limited to: MALAVIYA NATIONAL INSTITUTE OF TECHNOLOGY. Downloaded on November 9, 2009 at 02:20 from IEEE Xplore. Restrictions apply.
92 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 12, NO. 1, JANUARY 2003
(a) (b)
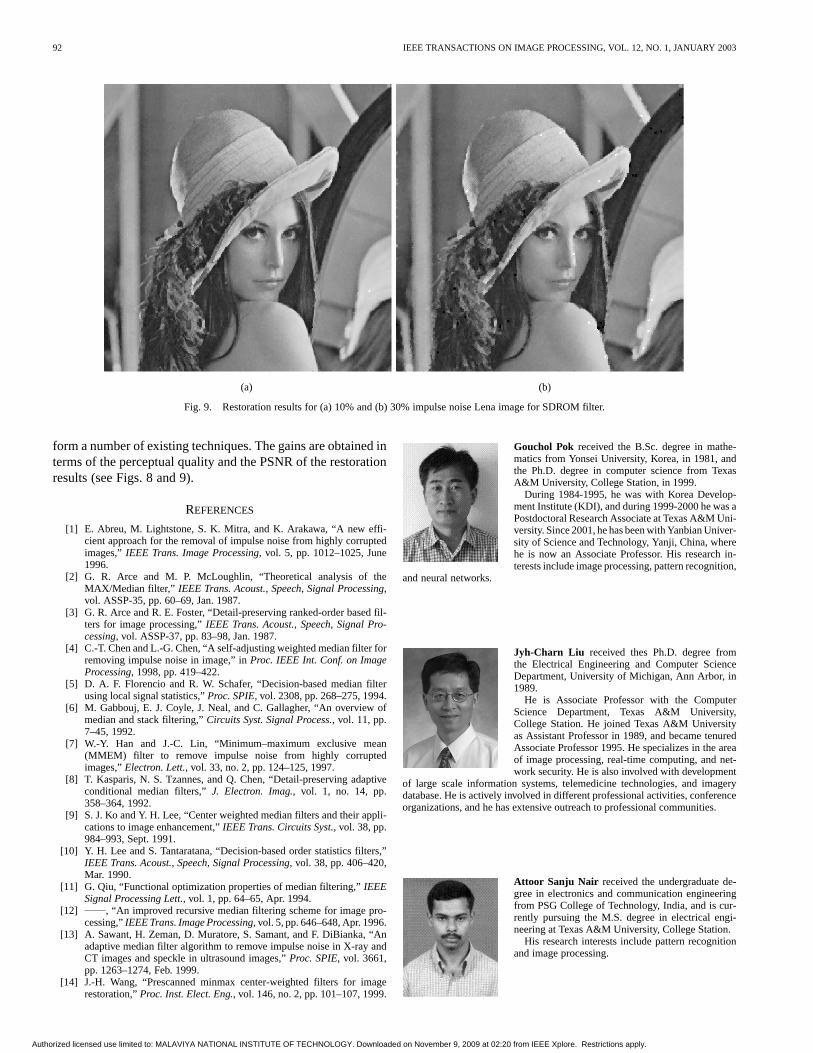
Fig. 9. Restoration results for (a) 10% and (b) 30% impulse noise Lena image for SDROM filter.
form a number of existing techniques. The gains are obtained interms of the perceptual quality and the PSNR of the restorationresults (see Figs. 8 and 9).
REFERENCES
[1] E. Abreu, M. Lightstone, S. K. Mitra, and K. Arakawa, “A new effi-cient approach for the removal of impulse noise from highly corruptedimages,”IEEE Trans. Image Processing, vol. 5, pp. 1012–1025, June1996.
[2] G. R. Arce and M. P. McLoughlin, “Theoretical analysis of theMAX/Median filter,” IEEE Trans. Acoust., Speech, Signal Processing,vol. ASSP-35, pp. 60–69, Jan. 1987.
[3] G. R. Arce and R. E. Foster, “Detail-preserving ranked-order based fil-ters for image processing,”IEEE Trans. Acoust., Speech, Signal Pro-cessing, vol. ASSP-37, pp. 83–98, Jan. 1987.
[4] C.-T. Chen and L.-G. Chen, “A self-adjusting weighted median filter forremoving impulse noise in image,” inProc. IEEE Int. Conf. on ImageProcessing, 1998, pp. 419–422.
[5] D. A. F. Florencio and R. W. Schafer, “Decision-based median filterusing local signal statistics,”Proc. SPIE, vol. 2308, pp. 268–275, 1994.
[6] M. Gabbouj, E. J. Coyle, J. Neal, and C. Gallagher, “An overview ofmedian and stack filtering,”Circuits Syst. Signal Process., vol. 11, pp.7–45, 1992.
[7] W.-Y. Han and J.-C. Lin, “Minimum–maximum exclusive mean(MMEM) filter to remove impulse noise from highly corruptedimages,”Electron. Lett., vol. 33, no. 2, pp. 124–125, 1997.
[8] T. Kasparis, N. S. Tzannes, and Q. Chen, “Detail-preserving adaptiveconditional median filters,”J. Electron. Imag., vol. 1, no. 14, pp.358–364, 1992.
[9] S. J. Ko and Y. H. Lee, “Center weighted median filters and their appli-cations to image enhancement,”IEEE Trans. Circuits Syst., vol. 38, pp.984–993, Sept. 1991.
[10] Y. H. Lee and S. Tantaratana, “Decision-based order statistics filters,”IEEE Trans. Acoust., Speech, Signal Processing, vol. 38, pp. 406–420,Mar. 1990.
[11] G. Qiu, “Functional optimization properties of median filtering,”IEEESignal Processing Lett., vol. 1, pp. 64–65, Apr. 1994.
[12] , “An improved recursive median filtering scheme for image pro-cessing,”IEEE Trans. Image Processing, vol. 5, pp. 646–648, Apr. 1996.
[13] A. Sawant, H. Zeman, D. Muratore, S. Samant, and F. DiBianka, “Anadaptive median filter algorithm to remove impulse noise in X-ray andCT images and speckle in ultrasound images,”Proc. SPIE, vol. 3661,pp. 1263–1274, Feb. 1999.
[14] J.-H. Wang, “Prescanned minmax center-weighted filters for imagerestoration,”Proc. Inst. Elect. Eng., vol. 146, no. 2, pp. 101–107, 1999.
Gouchol Pok received the B.Sc. degree in mathe-matics from Yonsei University, Korea, in 1981, andthe Ph.D. degree in computer science from TexasA&M University, College Station, in 1999.
During 1984-1995, he was with Korea Develop-ment Institute (KDI), and during 1999-2000 he was aPostdoctoral Research Associate at Texas A&M Uni-versity. Since 2001, he has been with Yanbian Univer-sity of Science and Technology, Yanji, China, wherehe is now an Associate Professor. His research in-terests include image processing, pattern recognition,
and neural networks.
Jyh-Charn Liu received thes Ph.D. degree fromthe Electrical Engineering and Computer ScienceDepartment, University of Michigan, Ann Arbor, in1989.
He is Associate Professor with the ComputerScience Department, Texas A&M University,College Station. He joined Texas A&M Universityas Assistant Professor in 1989, and became tenuredAssociate Professor 1995. He specializes in the areaof image processing, real-time computing, and net-work security. He is also involved with development
of large scale information systems, telemedicine technologies, and imagerydatabase. He is actively involved in different professional activities, conferenceorganizations, and he has extensive outreach to professional communities.
Attoor Sanju Nair received the undergraduate de-gree in electronics and communication engineeringfrom PSG College of Technology, India, and is cur-rently pursuing the M.S. degree in electrical engi-neering at Texas A&M University, College Station.
His research interests include pattern recognitionand image processing.
Authorized licensed use limited to: MALAVIYA NATIONAL INSTITUTE OF TECHNOLOGY. Downloaded on November 9, 2009 at 02:20 from IEEE Xplore. Restrictions apply.