research article mathematical model and analysis of the
TRANSCRIPT
Research ArticleMathematical Model and Analysis ofthe Water-Lubricated Hydrostatic Journal Bearingsconsidering the Translational and Tilting Motions
Hui-Hui Feng1 Chun-Dong Xu1 and Jie Wan2
1 School of Mechanical Engineering Southeast University Nanjing 211189 China2 CSR Qishuyan Institute Co Ltd Changzhou 213011 China
Correspondence should be addressed to Hui-Hui Feng fhhwjmail163com
Received 14 April 2014 Revised 13 June 2014 Accepted 17 June 2014 Published 17 July 2014
Academic Editor Nam-Il Kim
Copyright copy 2014 Hui-Hui Feng et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
The water-lubricated bearings have been paid attention for their advantages to reduce the power loss and temperature rise andincrease load capacity at high speed To fully study the complete dynamic coefficients of two water-lubricated hydrostatic journalbearings used to support a rigid rotor a four-degree-of-freedommodel considering the translational and tiltingmotion is presentedThe effects of tilting ratio rotary speed and eccentricity ratio on the static and dynamic performances of the bearings areinvestigated The bulk turbulent Reynolds equation is adopted The finite difference method and a linear perturbation methodare used to calculate the zeroth- and first-order pressure fields to obtain the static and dynamic coefficients The results suggestthat when the tilting ratio is smaller than 04 or the eccentricity ratio is smaller than 01 the static and dynamic characteristics arerelatively insensitive to the tilting and eccentricity ratios however for larger tilting or eccentricity ratios the tilting and eccentriceffects should be fully considered Meanwhile the rotary speed significantly affects the performance of the hydrostatic water-lubricated bearings
1 Introduction
Hydrostatic journal bearings are applied widely in spindle-bearing systems owning to their favorable performancecharacteristics However with the requirement of highermachining speed the limitations of the conventional oil filmbearings are apparently due to their remarkable power loss aswell as the temperature rise Therefore the water-lubricatedbearings were developed and have been studied to fulfillthe targets of lower power loss lower temperature rise andheavier load capacity at high speed
Many studies related to water-lubricated bearings havebeen reported in the literatures in the past few years Liu et alcompared the oil-lubricated andwater-lubricated hybrid slid-ing bearings and the results show that the latter benefitsmorefrom improved processing precision and efficiency [1] Yuanet al study the static and dynamic characteristics of water-lubricated hybrid journal bearings compensated by short
capillaries [2] Yoshimoto et al investigated the static charac-teristics of water-lubricated hydrostatic conical bearings withspiral grooves for high speed spindles [3] Gao et al analyzedthe effects of eccentricity ration on pressure distributionof water-lubricated plain journal bearings by computationalfluid dynamics (CFD) [4] In summary extensive researcheshave been conducted in the area of water lubricated bearingsin various aspects numerical methods [1] performance ofthe bearings with various geometries [2 3 5 6] effects ofvarious kinds of restrictors upon performance of a bearing[7] et al However their studies were restricted to the static ordynamic characteristics of plain or grooved journal bearingsconsidering only translational motion of the journal
In actual practice the bearings and the journals maynot be properly aligned as a result of improper assemblyor noncentral loading As a consequence not only shouldthe translational motion of the rotor be studied but alsothe tilting motion of the rotor should be investigated
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014 Article ID 353769 15 pageshttpdxdoiorg1011552014353769
2 Mathematical Problems in Engineering
Front bearing Rear bearingMass center
3
Z
Y
120579y
120579x
X
52 ∘
R26
l1 l2
lm1 lm2
Figure 1 The arrangement and coordinate system of the bearings [6]
Displacement of mass center
120579
Figure 2 The rigid rotor-bearing model
As a result the complete stiffness and damping coefficientsof a journal bearing which is important to the vibration ofa rotor should be taken into consideration in four degreesof freedom including the translation in 119909 119910 direction andtilting about the 119909- and 119910-axis Numerous studies concerningthe tilting motion of journal are available in the literatures[8ndash10] Recently Jang et al [11ndash13] thoroughly investigatedthe dynamic characteristics of the journal and groove thrustbearings used to support a HDD spindle considering bothof the translational motion and tilting motion of the journalResults show that the tilting motions have an important rolein the dynamic characteristics of the proposed bearings
Unlike the conventional oil film bearings water-lubricated bearings utilized in spindle are different inworking conditions and characteristics However forhydrostatic water-lubricated journal bearings we are notaware of any previous investigations to study their dynamiccharacteristics considering the translational and titlingmotions Therefore in this work we aim to fully studythe complete dynamic coefficients for two water-lubricatedhydrostatic journal bearings used to support a rigid rotorThedynamic characteristics will be categorized into four groupscoefficients of force to displacement coefficients of force toangle coefficients of moment to angle and coefficients ofmoment to displacement In the present study in order tofully study the variations of the complete static and dynamic
characteristics of the proposed water-lubricated bearings theinfluences of the tilting ratio rotary speed and eccentricityratio on the bearings have been studied
2 Mathematical Models
Figure 1 shows the schematic representations for a rigid rotorsupported by a pair of identical water-lubricated journalbearings as well as the geometry of a hydrostatic water-lubricated journal bearing Pressed water enters the bearingacross an orifice restrictor flows into the film lands and thenexits the bearing The recess pressure is regarded as uniformAs shown in Figure 1 the rigid rotor moved in an inertialreference frame 119862mdash119883119884119885 the rotor tilts about 119883 by an angle120579119909and tilts about 119884 by an angle 120579
119910 The rigid rotor-bearing
model is shown in Figure 2
21 Reynolds Equation For an isoviscous incompressiblefluid the Reynolds equation governing the turbulent bulkflow in nondimensional form is given as
120597
120597120593
(
1198661199091198673
120583
120597119875
120597120593
) +
1199032
1198972
120597
120597120582
(
1198661199111198673
120583
120597119875
120597120582
) = Γ1
120597119867
120597120593
+ Γ2
120597119867
120597120591
(1)
Mathematical Problems in Engineering 3
where Γ1
= 1205830Ω21198751199041205992 Γ2
= 1205830Ω1199011199041205992 120599 = 119888119903 and the
details of the turbulent coefficients 119866119909 119866119911can be obtained as
follows [6 14ndash16]
119881119909= minus119866119909
ℎ2
120583
120597119901
120597119909
+ 119866119869
119880
2
119881119885= minus119866119885
ℎ2
120583
120597119901
120597119911
119877119861=
120588ℎ
120583
[1198812
119909+ 1198812
119885]
12
119877119869=
120588ℎ
120583
[(119881119909minus 119880)2
+ 1198812
119885]
12
119891119869= 0066119877
minus025
119869
119891119861= 0066119877
minus025
119861
119896119869= 119891119869119877119869
119896119861= 119891119861119877119861
119866119909= 119866119911=
2
(119896119869+ 119896119861)
(2)
With the increase of rotary speed or film depth the flow islikely to become turbulent from laminar state The turbulentcoefficients 119866
119909 119866119910 and 119866
119911dependent on the fluid velocity
field are obtained as follows [15]
119866119909= min
1
12
119866119909
119866119910= min
1
12
119866119910
119866119911= min
1
12
119866119911
(3)
At the bearing exit plane the pressure takes a constantvalue equal to the ambient pressure
22 Continuity Equation The dimensionless continuityequation at the recess is defined by the global balancebetween the flow through the orifice restrictor and the recessoutflow into the film lands
120582radic(1 minus 119875119903) = int
1198781+1198783
(
61205830119871119903Ω
1198751199041198882
119867 minus
12119871
119903
1198661199091198673
120583
120597119875
120597120593
)119889120582
+ int
1198782+1198784
12119903
119871
1198661199111198673
120583
120597119875
120597120582
119889120593
(4)
where 120582 = 3radic21205871205721198892
0120583(1198883
radic120588119875119904) 119875119903is the recess pressure
11987813
is the circumferential recess boundary and 11987824
is the axialrecess boundary
23 Perturbation Analysis The journal center rotates aboutits steady-state position (119909
0 1199100 1205791199090 1205791199100) with a small whirl
which is generated from the variations due to the translations
of the rotormass center and variations due to the tilting angles[11ndash13] For small amplitude motions the dimensionless filmthickness and pressure fields are expressed as the sum of azeroth-order field and first-order field describing the steady-state condition and perturbed motion respectively
The dimensionless perturbed film expression consideringthe tilting angles is [12]
119867119894119895
= 1198670119894119895
+ Δ120576119909sdot sin 120579
119894119895+ Δ120576119910sdot cos 120579
119894119895+ 120593119869Δ120579119909+ 120595119869Δ120579119910
1198670119894119895
= 1 + 1205760cos120593119894119895
+ 120593119869120579119909+ 120595119869120579119910
(5)
where
120593119869=
120574119897119894119895cos 120579119909cos 120579119894119895
119888
120595119869= minus
120574119897119894119895cos 120579119910sin 120579119894119895
119888
(6)
where 119897119894119895
is the distance between the grid node of eachbearing and the mass center of the rotor supported on thebearings 120574 = 1 for the front journal bearing and 120574 = minus1 forthe rear journal bearing
The dimensionless perturbed pressure expression is
119875 = 1198750+
120597119875
120597Δ120576119909
Δ120576119909 +
120597119875
120597Δ120576119910
Δ120576119910 +
120597119875
120597Δ120579119909
Δ120579119909+
120597119875
120597Δ120579119910
Δ120579119910
+
120597119875
120597Δ120576
Δ120576 +
120597119875
120597Δ120576 119910
Δ120576 119910 +
120597119875
120597Δ
120579119909
Δ
120579119909+
120597119875
120597Δ
120579119910
Δ
120579119910
(7)
Substitution of the perturbed equations (5)ndash(7) intothe Reynolds equation yields the zeroth- and first-orderexpressions
120597
120597120593
(
1198661199091198673
120583
120597119875120585
120597120593
) +
1199032
1198972(
1198661199111198673
120583
120597119875120585
120597120582
) = 119865120585
(120585 = 0 119909 119910 120579119909 120579119910 119910
120579119909
120579119910)
1198650= Γ1
1205971198670
120597120593
119865120576119909
= minus
120597
120597120593
[
11986611990931198672
0
120583
sin 120579
1205971198750
120597120593
]
minus
1199032
1198972
120597
120597120582
[
11986611991131198672
0
120583
sin 120579
1205971198750
120597120582
]
+ Γ1(sum
120597 (sin 120579)
120597120593
) + Γ2(sum
120597 (sin 120579)
120597120591
)
119865120576119910
= minus
120597
120597120593
[
11986611990931198672
0
120583
cos 1205791205971198750
120597120593
]
minus
1199032
1198972
120597
120597120582
[
11986611991131198672
0
120583
cos 1205791205971198750
120597120582
]
4 Mathematical Problems in Engineering
+ Γ1(sum
120597 (cos 120579)120597120593
) + Γ2(sum
120597 (cos 120579)120597120591
)
119865120579119909
= minus
120597
120597120593
[
11986611990931198672
0
120583
120593119869
1205971198750
120597120593
] minus
1199032
1198972
120597
120597120582
[
11986611991131198672
0
120583
120593119869
1205971198750
120597120582
]
+ Γ1(sum
120597 (120593119869)
120597120593
) + Γ2(sum
120597 (120593119869)
120597120591
)
119865120579119910
= minus
120597
120597120593
[
11986611990931198672
0
120583
120595119869
1205971198750
120597120593
] minus
1199032
1198972
120597
120597120582
[
11986611991131198672
0
120583
120595119869
1205971198750
120597120582
]
+ Γ1(sum
120597 (120595119869)
120597120593
) + Γ2(sum
120597 (120595119869)
120597120591
)
119865120576 119909
= Γ2sin 120579
119865120576 119910
= Γ2cos 120579
119865120576120579119909
= Γ2120593119869
119865120576120579119910
= Γ2120595119869
(8)
The perturbed quality into the orifice diameter can beobtained by Taylor expansion
119876119894119899
= 120582(1 minus 1198751199030)12
minus
120582
2
(1 minus 1198751199030)minus12
(119875119903minus 1198751199030) (9)
Substitution of the perturbed equations (5)ndash(7) intothe continuity equation yields the zeroth- and first-orderexpressions
120582radic(1 minus 1198751199030) = int
1198781+1198783
(
61205830119871119903Ω
1198751199041198882
1198670119894119895
minus
12119871
119903
1198661199091198673
0119894119895
120583
1205971198750
120597120593
)119889120582
+ int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
1205971198750
120597120582
119889120593
minus
120582
2
(1 minus 1198751199030)minus12
119875120585
=
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
sdot sin 120579119894119895119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895sin 120579119894119895
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576119909
120597120593
119889120582
+int
1198782+1198784
12119903
119871
11986611991131198672
0119894119895sin 120579119894119895
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576119909
120597120582
119889120593
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
cos 120579119894119895119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895cos 120579119894119895
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576119910
120597120593
119889120582
+int
1198782+1198784
12119903
119871
31198661199111198672
0119894119895cos 120579119894119895
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576119910
120597120582
119889120593
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
120593119869119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895120593119869
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579119909
120597120593
119889120582
+int
1198782+1198784
12119903
119871
31198661199111198672
0119894119895120593119869
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579119909
120597120582
119889120593
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
120595119869119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895120595119869
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579119910
120597120593
119889120582
+int
1198782+1198784
12119903
119871
31198661199111198672
0119894119895120595119869
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579119910
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576 119909
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576 119909
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576 119910
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576 119910
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579 119909
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579 119909
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579 119910
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579 119910
120597120582
119889120593
(10)
Mathematical Problems in Engineering 5
The finite difference method (FDM) and a successiveover-relaxation (SOR) scheme are implemented to solve (1)ndash(10) to find the pressure distribution When the steady andperturbed pressure distributions are obtained the static anddynamic coefficients can be solved
24 Static Characteristics The quality frictional power lossand pump power are calculated by integration of the pressurefield on the bearing surfaces
119876119894119899
= 120582radic1 minus 119875119903 (11)
ℎ119891=
120583(119903Ω)2
ℎ0
∬119903119889120593119889119911 +
120583Ω2
ℎ0
∬1199033
119889119903 119889120593 (12)
ℎ119901= 119875119904119876 (13)
San Andres et al carried out a systematic research on thewater-lubricated hydrostatic journal bearings both theoreti-cally and experimentally [17] Numerical and experimentalresults show that predictions of the bearing performancecharacteristics like flow rate load capacity and rotor dynamicforce coefficients are not affected by the small temperaturevariations (Δ119879 lt 10
∘C) in the water hydrostatic journalbearings As a result an adiabatic isothermal assumption ismade in this study All the heat produced in the bearings byfriction is considered absorbed by water film The averageelevated temperature is given by
Δ119879 =
ℎ119891+ ℎ119901
119876120588119862V (14)
where 120588 is the density of water and 119862V is the specific heatcapacity of water
25 Dynamic Characteristics The dynamic coefficients ofthe journal bearings can be calculated by integrating theperturbed pressure across the fluid filmThere are 16 stiffnessand damping coefficients and the dynamic coefficients can begrouped into four categories coefficients of force to displace-ment coefficients of force to angle coefficients of moment toangle and coefficients of moment to displacement
[119870119869] =
[
[
[
[
[
[
[
119870119909119909
119870119909119910
119870119909120579119909
119870119909120579119910
119870119910119909
119870119910119910
119870119910120579119909
119870119910120579119910
119870119872119909119909
119870119872119909119910
119870119872119909120579119909
119870119872119909120579119909
119870119872119910119909
119870119872119910119910
119870119872119909120579119909
119870119872119909120579119909
]
]
]
]
]
]
]119869
= minus∬
[
[
[
[
[
[
sin 120579
cos 120579minus120574119897119894119895cos 120579
120574119897119894119895sin 120579
]
]
]
]
]
]
[119875119909119875119910
119875120579119909
119875120579119910] 119889120593 119889120582
Table 1 Operating condition of the test bearing [17]
Orifice diameter (mm) 249 Supply temperature (∘C) 55Length (mm) 762 Supply pressure (MPa) 4Film thickness (um) 127 Rotary speed (rpm) 24600
41∘
R381
Figure 3 Geometry of the test water-lubricated hydrostatic journalbearing [17]
[119861119869] =
[
[
[
[
[
[
[
119887119909119909
119887119909119910
119887119909120579119909
119887119909120579119910
119887119910119909
119887119910119910
119887119910120579119909
119887119910120579119910
119887119872119909119909
119887119872119909119910
119887119872119909120579119909
119887119872119909120579119909
119887119872119910119909
119887119872119910119910
119887119872119909120579119909
119887119872119909120579119909
]
]
]
]
]
]
]119869
= minus∬
[
[
[
[
[
[
sin 120579
cos 120579minus120574119897119894119895cos 120579
120574119897119894119895sin 120579
]
]
]
]
]
]
[119875 119909119875119910119875 120579119909
119875 120579119910] 119889120593 119889120582
(15)
26 The Numerical Solution Procedure The finite differencemethod (FDM) and a successive over-relaxation (SOR)scheme are implemented to solve (1)ndash(10) governing theflow in the film to find the pressure distribution The over-relaxation factor always lies between (1sim2) By trial and errorone can determine an optimum value of the relaxation factorfor the fastest convergence Normally 17 is a good startingpoint for determining the relaxation factor [18] In thenumerical procedure implemented any negative pressurescalculated in the cavitation zone are arbitrarily set equalto zero (or ambient) pressure [18] The pressure iterationsare continued until the following convergence criterion issatisfied
sum119898
119895=1sum119899
119894=1
10038161003816100381610038161003816119875(119896)
119894119895minus 119875(119896minus1)
119894119895
10038161003816100381610038161003816
sum119898
119895=1sum119899
119894=1
10038161003816100381610038161003816119875(119896)
119894119895
10038161003816100381610038161003816
le 120575 (16)
where 120575 is the convergence criteria which is set as 10minus3
Once the pressure field is established for the water filmother performance parameters follow from the pressuredistributionThe steady and perturbed pressure distributions
6 Mathematical Problems in Engineering
00 01 02 03 04 05
0
1000
2000
3000
4000
5000
6000
7000
8000Lo
ad ca
paci
ty (N
)
Eccentricity ratio
Experimental resultsNumerical predictions
minus1000
(a) Comparison of load capacity
00 01 02 03 04 0500
04
08
12
16
20
Mas
s flow
rate
(kg
s)
Eccentricity ratio
Experimental resultsNumerical predictions
(b) Comparison of mass flow rate
Figure 4 Comparison of static performance of experimental results[17] and numerical predictions in respect to eccentricity ratio
obtained are subsequently integrated to yield the desiredstatic and dynamic coefficients
The fluid film was discretized by rectangular grid withunequal intervals which are 0033 0088 and 01154 forthe film land recess and return groove respectively in thecircumferential direction and 002 and 004 for the film landand recess area in the axial direction The total number ofthe grid is 31 times 102 It takes about 35 seconds for the staticperformance to achieve convergence A few validation testsweremade with a coarser grid of 31 times 86 and finer grid of 37 times
158 with different intervals and in no case did the predictedresults of the static characteristics differ by more than 01percent from those obtained by the initial grid
3 Results and Discussion
31 Comparisons of Present Solution with ExperimentalResults The present numerical solution has been correlated
Front bearingRear bearing
00 01 02 03 04 05 06 07 08 09 10218
220
222
224
226
228
230
232
234
236
Qua
lity
(Lm
in)
Tilting ratiominus01
(a) The effect of tilting angle on the quality
Front bearingRear bearing
00 01 02 03 04 05 06 07 08 09 10240242244246248250252254256258260262264
Gro
ss p
ower
loss
(W)
Tilting ratiominus01
(b) The effect of tilting angle on the power loss
00 01 02 03 04 05 06 07 08 09 10148
152
156
160
164
168
172
Tilting ratio
Tem
pera
ture
rise
(∘C)
minus01
Front bearingRear bearing
(c) The effect of tilting angle on the temperature rise
Figure 5 The effect of tilting angle on the static performance of thewater-lubricated bearing
Mathematical Problems in Engineering 7
00 01 02 03 04 05 06 07 08
00
05
10
15
20
25
30
35
Stiff
ness
of f
orce
to d
ispla
cem
ent (
Nm
)
Tilting ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
Eccentricity ratio = 0
minus05
minus10
minus15
minus01
times108
(a) The stiffness of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Tilting ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus tilting ratio
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
00 01 02 03 04 05 06 07 08
00
05
10
15
20
25
30
35
40
Tilting ratio
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
Eccentricity ratio = 0times10
6
minus05
minus10
minus15
minus01
(c) The stiffness of moment to angle versus tilting ratio
Tilting ratio00 01 02 03 04 05 06 07 08
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
Eccentricity ratio = 0times10
7
minus1
minus2
minus3
minus4
minus01
(d) The stiffness of moment to displacement versus tilting ratio
Figure 6 The effect of tilting ratio on the stiffness
and validated with the experimental results available inthe literature A five-recess turbulent-flow water-lubricatedhydrostatic bearing operating at a high rotational speed istested by San Andres et al [17] Table 1 shows the bearingdescription and operating conditions and Figure 3 shows theschematic of the bearing Figure 4 shows a comparison ofmeasured load capacity and flow rate and the numerical pre-dictions in respect to eccentricity ratio As shown in Figure 4a good agreement is observed between the present numericalpredictions and the experimental results available in the
reference The calculated load capacity results correlate wellwith the experimental results with a maximum differenceof 115 The average of the flow rate for the experimentalresults is about 12 kgs while that for the numerical resultsis approximately 145 kgs
32 Effects of Tilting Ratio on the Static Performances of theBearings The geometric parameters for the bearings havebeen presented in Figure 1 the supply pressure is 15MPa the
8 Mathematical Problems in Engineering
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
Tilting ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
Eccentricity ratio = 0
minus04
minus01
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
000408121620242832
Tilting ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus12
minus16
minus20
minus24
minus28
minus32
minus01
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
32
Tilting ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus01
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Tilting ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
times104
(d) The damping of moment to displacement versus tilting ratio
Figure 7 The effect of tilting ratio on the damping coefficients
orifice diameter is 06mm the pressurized water is suppliedat a temperature of 30∘C and the viscosity is 000087 Pa sdot s
Figure 1 shows the coordinate system for the tiltingmotion of the rotor As the film variation of each bearingvaries with different values for the tilting angles and bearingspan the tilting ratio is proposed here to investigate the effectof misalignment The tilting ratio is defined as follows
120581 =
119897119898radic1205792
119909+ 1205792
119910
119888
(17)
where 119897119898is the distance between the titling center and the left
edge of the front bearing or the right edge of the rear bearingwhich is shown in Figure 1
In order to obtain a better physical insight into theeffect of misalignment the static characteristics have beenpresented with eccentricity ratio equal to zero Figures 5(a)ndash5(c) show the calculated quality power loss and temperaturerise for different values of tilting ratios for each journalbearing operating at 10000 rpm It is observed that the qualityof each bearing undergoes a reduction by only 63 when
Mathematical Problems in Engineering 9
5000 10000 15000 20000 25000 3000020
21
22
23
24
25G
ross
qua
lity
(Lm
in)
Rotary speed (rpm)
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
5000 10000 15000 20000 25000 300000
200
400
600
800
1000
1200
1400
Rotary speed (rpm)
Gro
ss p
ower
loss
(W)
(b) The effect of rotary speed on the power loss
5000 10000 15000 20000 25000 300000
1
2
3
4
5
6
7
8
9
10
Rotary speed (rpm)
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 8 The effect of rotary speed on the static performance of the water-lubricated bearing
the tilting ratio increases from zero to 075 The total powerloss of each bearing keeps almost unchanged when the tiltingratio is not greater than 04 However when the tiltingratio continues to increase the power loss gets a slightincrease by approximately 5 Meanwhile the temperaturerise increases with increased tilting ratio The reason for thisis that increasing tilting angles will increase the film variationof each bearing which promote the hydrodynamic andturbulent effect It is noticed that the maximum temperaturerise for the investigated water-lubricated bearing is 17∘C forthe rotor-bearing system investigated here which is far lowerthan the conventional oil film bearings This in turn verifiesthe validation of the adiabatic assumption In conclusionwhen the tilting ratio is smaller than 04 the influence oftilting ratio on the static performance of a water-lubricatedhydrostatic journal bearing can be ignored
33 Effects of Tilting Ratio on the Dynamic Characteristicsof the Bearings Figures 6 and 7 show the variation of thedynamic coefficients of the two identical bearings in respectto the tilting ratio with a rotary speed of 10000 rpm Theeccentricity ratio is assumed to be zero to exclude the effectof the clearance change due to the eccentricity ratioThe solidlines represent the dynamic coefficients of the front journalbearing while the dotted lines represent those of the rearbearing
According to the results the dynamic coefficients of forceto displacement andmoment to angle for the front bearing areapproximately equal to those for the rear bearing due to thefact that the tilting center almost coincides with the bearingspan center However the coupled dynamic coefficients offorce to angle and moment to displacement for the twobearings have close proximitymagnitudes but in the opposite
10 Mathematical Problems in Engineering
5000 10000 15000 20000 25000 30000
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Rotary speed (rpm)
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
minus3
minus4
times108
(a) The stiffness of force to displacement versys rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Rotary speed (rpm)
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(b) The stiffness of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times106
(c) The stiffness of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(d) The stiffness ofmoment to displacement versus rotary speed
Figure 9 The effect of rotary speed on the stiffness coefficients
direction due to the fact that the two bearings are arranged atboth sides of the mass center which is the origin of the tiltingmotions It is observed that with the increase of the tiltingratio the stiffness and damping coefficients of the bearingskeep almost independent of the tilting ratio when it is notlarger than 04 however when the tilting ratio continuesto increase the effect on dynamic coefficients is significantwith a maximum variation rate of 167 for the stiffnessand 492 for the damping coefficients Furthermore thelarger the tilting ratio is the greater the differences amongthe coefficients are This can be ascribed to the variations
of the film thickness induced by the tilting angles andbearing span which can be calculated according to (5) Theresults indicate that for a small tilting ratio the effect ofthe misalignment on the performance of hydrostatic water-lubricated journal bearings can be ignored but for a relativelygreater tilting ratio the effect of misalignment should betaken into consideration
34 Effects of Rotary Speed on the Static Performances ofthe Bearings Figure 8 depicts the variation of the staticcharacteristics for each journal bearing in respect to
Mathematical Problems in Engineering 11
5000 10000 15000 20000 25000 30000
00
02
04
06
08
10
12
14
16
Rotary speed (rpm)
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus02
minus04
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus04
minus08
minus12
minus16
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
minus04
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Rotary speed (rpm)
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
minus04
minus08
minus12
minus16
minus20
times104
(d) The damping of moment to displacement versus rotary speed
Figure 10 The effect of rotary speed on the damping coefficients
the rotary speed In the case of a water-lubricated hydrostaticbearing operating with eccentricity ratio and tilting anglesequal to zero it may be observed that the static characteristicsof the front bearing are the same as those of the rearbearing As shown in Figure 8(a) the quality of each bearingapparently remains unchanged with increased rotary speedAs shown in Figures 8(b) and 8(c) the gross power loss foreach bearing increases dramatically from 123W to 1232Wwhen the rotary speed increases from 5000 rpm to 30000 rpmbecause the frictional power loss is closely related to therotary speed according to (12) Furthermore the temperature
rise undergoes a sharp increase from07∘C to 8∘C It should bepointed out that most of the predicted temperature rises arehigher than the actual values presumably due to the adiabaticassumption imposed on the analysis Considering the valuesof the temperature rise the adiabatic flow assumption is fullyjustified for the bearing studied However when the rotaryspeed continues to increase the energy equation should beincluded to predict the temperature rise precisely
35 Effects of Rotary Speed on the Dynamic Characteristics ofthe Bearings Figures 9 and 10 show the dynamic coefficients
12 Mathematical Problems in Engineering
00 01 02 03 04 05220
225
230
235
240G
ross
qua
lity
(Lm
in)
Eccentricity ratio
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
00 01 02 03 04 05240
241
242
243
244
245
246
247
248
249
250
Gro
ss p
ower
loss
(W)
Eccentricity ratio
(b) The effect of rotary speed on the power loss
00 01 02 03 04 05148
150
152
154
156
158
160
Eccentricity ratio
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 11 The effect of eccentricity ratio on the static performance of the water-lubricated bearing
of each water-lubricated bearing in respect to the rotaryspeedThe eccentricity ratio and tilting angles are assumed aszero to exclude their influences on the film thickness Accord-ing to the results a higher rotary speed generates largercoupled stiffness of force to displacement and moment toangle but the influence of rotary speed on the relative directcoefficients is smallThe direct stiffness coefficients of force toangle and moment to displacement are relatively insensitiveto the variation of the rotary speed The magnitudes of thecross-coupled stiffness of force to displacement and momentto angle are comparable to those of the direct stiffnesswhich demonstrates the importance of hydrodynamic effectsUnlike the stiffness the damping coefficients are independentof the rotary speed in the aligned condition The reasonfor this is that the perturbed pressure due to the perturbedvelocity is not related to the rotary speed of the rotor
36 Effects of Eccentricity Ratio on the Static Performances ofthe Bearings The influence of eccentricity ratio in alignedcondition on static performances of each bearing is as shownin Figure 11 The tilting ratio is assumed as zero to excludethe influence of tilting effect Figure 11(a) indicates that thevalue of quality for each bearing decreases slowly with theeccentricity ratio As is shown in Figure 11(b) the powerloss is almost constant at first and then increases withincreased eccentricity ratio The maximum temperature riseacross the bearing length is about 16∘C at the eccentricityratio equal to 05 This is expected since a smaller clearanceproduces a larger frictional power loss and a smaller flowrate However it should be pointed out that in the alignedcondition the static characteristics of the hydrostatic water-lubricated journal bearings vary slightly with eccentricityratio
Mathematical Problems in Engineering 13
00 01 02 03 04 05
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Eccentricity ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
times108
(a) The stiffness of force to displacement versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Eccentricity ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
times106
minus1
minus2
(c) The stiffness of moment to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
times107
minus1
minus2
minus3
minus4
(d) The stiffness of moment to displacement versus eccentricityratio
Figure 12 The effect of eccentricity ratio on the stiffness coefficients
37 Effects of Eccentricity Ratio on the Dynamic Characteristicsof the Bearings Figures 12 and 13 show a variation ofstiffness and damping coefficients of each bearing versusthe eccentricity ratio It may be noticed that the dynamiccoefficients are almost constant as the eccentricity ratioincreases from 0 to 01 The direct stiffness of force todisplacement and moment to angle decreases gradually withincreased eccentricity ratio Generally the coupled stiffnessvaries significantly with the eccentricity ratio The coupledcoefficients of force to angle and moment to displacement
for the front bearing have the same magnitude as thosefor the rear bearing but in the opposite direction Thedamping coefficients are also relatively insensitive to theeccentricity ratio when it is not larger than 01 However inlarger eccentric condition the damping coefficients vary witheccentricity ratio and the larger the eccentricity ratio is thegreater the coefficients change In summary for the smalleccentric condition (le01) the influence of eccentricity ratioon the full dynamic coefficients for the hydrostatic water-lubricated journal bearing operating in aligned condition can
14 Mathematical Problems in Engineering
00 01 02 03 04 05
00
04
08
12
16
20
Eccentricity ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus04
minus08
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus eccentricity ratio
00 01 02 03 04 05
00
05
10
15
20
Eccentricity ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus05
minus10
minus15
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Eccentricity ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
minus04
minus08
(c) The damping of moment to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Eccentricity ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
times104
minus04
minus08
minus12
minus16
minus20
(d) The damping of moment to displacement versus eccentricityratio
Figure 13 The effect of eccentricity ratio on the damping coefficients
be ignored however for a larger eccentric condition theinfluence should be fully discussed
4 Conclusion
This paper investigated the complete dynamic coefficientsfor two hydrostatic water-lubricated journal bearings usedto support a rigid rotor considering the translational andtilting motion The bulk turbulent flow model and FDMmethod is used to numerically predict the performance of the
bearingsThe results show that the proposedwater-lubricatedhydrostatic bearing has the potential to fulfill the target oflower power loss temperature rise and larger load capacityat high speed On the basis of the results presented thefollowing conclusions can be drawn
(1) For a small tilting ratio (lt04) the influence of tiltingratio on the static and dynamic characteristics of awater-lubricated hydrostatic journal bearing is rela-tively small however when the tilting ratio continues
Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
Front bearing Rear bearingMass center
3
Z
Y
120579y
120579x
X
52 ∘
R26
l1 l2
lm1 lm2
Figure 1 The arrangement and coordinate system of the bearings [6]
Displacement of mass center
120579
Figure 2 The rigid rotor-bearing model
As a result the complete stiffness and damping coefficientsof a journal bearing which is important to the vibration ofa rotor should be taken into consideration in four degreesof freedom including the translation in 119909 119910 direction andtilting about the 119909- and 119910-axis Numerous studies concerningthe tilting motion of journal are available in the literatures[8ndash10] Recently Jang et al [11ndash13] thoroughly investigatedthe dynamic characteristics of the journal and groove thrustbearings used to support a HDD spindle considering bothof the translational motion and tilting motion of the journalResults show that the tilting motions have an important rolein the dynamic characteristics of the proposed bearings
Unlike the conventional oil film bearings water-lubricated bearings utilized in spindle are different inworking conditions and characteristics However forhydrostatic water-lubricated journal bearings we are notaware of any previous investigations to study their dynamiccharacteristics considering the translational and titlingmotions Therefore in this work we aim to fully studythe complete dynamic coefficients for two water-lubricatedhydrostatic journal bearings used to support a rigid rotorThedynamic characteristics will be categorized into four groupscoefficients of force to displacement coefficients of force toangle coefficients of moment to angle and coefficients ofmoment to displacement In the present study in order tofully study the variations of the complete static and dynamic
characteristics of the proposed water-lubricated bearings theinfluences of the tilting ratio rotary speed and eccentricityratio on the bearings have been studied
2 Mathematical Models
Figure 1 shows the schematic representations for a rigid rotorsupported by a pair of identical water-lubricated journalbearings as well as the geometry of a hydrostatic water-lubricated journal bearing Pressed water enters the bearingacross an orifice restrictor flows into the film lands and thenexits the bearing The recess pressure is regarded as uniformAs shown in Figure 1 the rigid rotor moved in an inertialreference frame 119862mdash119883119884119885 the rotor tilts about 119883 by an angle120579119909and tilts about 119884 by an angle 120579
119910 The rigid rotor-bearing
model is shown in Figure 2
21 Reynolds Equation For an isoviscous incompressiblefluid the Reynolds equation governing the turbulent bulkflow in nondimensional form is given as
120597
120597120593
(
1198661199091198673
120583
120597119875
120597120593
) +
1199032
1198972
120597
120597120582
(
1198661199111198673
120583
120597119875
120597120582
) = Γ1
120597119867
120597120593
+ Γ2
120597119867
120597120591
(1)
Mathematical Problems in Engineering 3
where Γ1
= 1205830Ω21198751199041205992 Γ2
= 1205830Ω1199011199041205992 120599 = 119888119903 and the
details of the turbulent coefficients 119866119909 119866119911can be obtained as
follows [6 14ndash16]
119881119909= minus119866119909
ℎ2
120583
120597119901
120597119909
+ 119866119869
119880
2
119881119885= minus119866119885
ℎ2
120583
120597119901
120597119911
119877119861=
120588ℎ
120583
[1198812
119909+ 1198812
119885]
12
119877119869=
120588ℎ
120583
[(119881119909minus 119880)2
+ 1198812
119885]
12
119891119869= 0066119877
minus025
119869
119891119861= 0066119877
minus025
119861
119896119869= 119891119869119877119869
119896119861= 119891119861119877119861
119866119909= 119866119911=
2
(119896119869+ 119896119861)
(2)
With the increase of rotary speed or film depth the flow islikely to become turbulent from laminar state The turbulentcoefficients 119866
119909 119866119910 and 119866
119911dependent on the fluid velocity
field are obtained as follows [15]
119866119909= min
1
12
119866119909
119866119910= min
1
12
119866119910
119866119911= min
1
12
119866119911
(3)
At the bearing exit plane the pressure takes a constantvalue equal to the ambient pressure
22 Continuity Equation The dimensionless continuityequation at the recess is defined by the global balancebetween the flow through the orifice restrictor and the recessoutflow into the film lands
120582radic(1 minus 119875119903) = int
1198781+1198783
(
61205830119871119903Ω
1198751199041198882
119867 minus
12119871
119903
1198661199091198673
120583
120597119875
120597120593
)119889120582
+ int
1198782+1198784
12119903
119871
1198661199111198673
120583
120597119875
120597120582
119889120593
(4)
where 120582 = 3radic21205871205721198892
0120583(1198883
radic120588119875119904) 119875119903is the recess pressure
11987813
is the circumferential recess boundary and 11987824
is the axialrecess boundary
23 Perturbation Analysis The journal center rotates aboutits steady-state position (119909
0 1199100 1205791199090 1205791199100) with a small whirl
which is generated from the variations due to the translations
of the rotormass center and variations due to the tilting angles[11ndash13] For small amplitude motions the dimensionless filmthickness and pressure fields are expressed as the sum of azeroth-order field and first-order field describing the steady-state condition and perturbed motion respectively
The dimensionless perturbed film expression consideringthe tilting angles is [12]
119867119894119895
= 1198670119894119895
+ Δ120576119909sdot sin 120579
119894119895+ Δ120576119910sdot cos 120579
119894119895+ 120593119869Δ120579119909+ 120595119869Δ120579119910
1198670119894119895
= 1 + 1205760cos120593119894119895
+ 120593119869120579119909+ 120595119869120579119910
(5)
where
120593119869=
120574119897119894119895cos 120579119909cos 120579119894119895
119888
120595119869= minus
120574119897119894119895cos 120579119910sin 120579119894119895
119888
(6)
where 119897119894119895
is the distance between the grid node of eachbearing and the mass center of the rotor supported on thebearings 120574 = 1 for the front journal bearing and 120574 = minus1 forthe rear journal bearing
The dimensionless perturbed pressure expression is
119875 = 1198750+
120597119875
120597Δ120576119909
Δ120576119909 +
120597119875
120597Δ120576119910
Δ120576119910 +
120597119875
120597Δ120579119909
Δ120579119909+
120597119875
120597Δ120579119910
Δ120579119910
+
120597119875
120597Δ120576
Δ120576 +
120597119875
120597Δ120576 119910
Δ120576 119910 +
120597119875
120597Δ
120579119909
Δ
120579119909+
120597119875
120597Δ
120579119910
Δ
120579119910
(7)
Substitution of the perturbed equations (5)ndash(7) intothe Reynolds equation yields the zeroth- and first-orderexpressions
120597
120597120593
(
1198661199091198673
120583
120597119875120585
120597120593
) +
1199032
1198972(
1198661199111198673
120583
120597119875120585
120597120582
) = 119865120585
(120585 = 0 119909 119910 120579119909 120579119910 119910
120579119909
120579119910)
1198650= Γ1
1205971198670
120597120593
119865120576119909
= minus
120597
120597120593
[
11986611990931198672
0
120583
sin 120579
1205971198750
120597120593
]
minus
1199032
1198972
120597
120597120582
[
11986611991131198672
0
120583
sin 120579
1205971198750
120597120582
]
+ Γ1(sum
120597 (sin 120579)
120597120593
) + Γ2(sum
120597 (sin 120579)
120597120591
)
119865120576119910
= minus
120597
120597120593
[
11986611990931198672
0
120583
cos 1205791205971198750
120597120593
]
minus
1199032
1198972
120597
120597120582
[
11986611991131198672
0
120583
cos 1205791205971198750
120597120582
]
4 Mathematical Problems in Engineering
+ Γ1(sum
120597 (cos 120579)120597120593
) + Γ2(sum
120597 (cos 120579)120597120591
)
119865120579119909
= minus
120597
120597120593
[
11986611990931198672
0
120583
120593119869
1205971198750
120597120593
] minus
1199032
1198972
120597
120597120582
[
11986611991131198672
0
120583
120593119869
1205971198750
120597120582
]
+ Γ1(sum
120597 (120593119869)
120597120593
) + Γ2(sum
120597 (120593119869)
120597120591
)
119865120579119910
= minus
120597
120597120593
[
11986611990931198672
0
120583
120595119869
1205971198750
120597120593
] minus
1199032
1198972
120597
120597120582
[
11986611991131198672
0
120583
120595119869
1205971198750
120597120582
]
+ Γ1(sum
120597 (120595119869)
120597120593
) + Γ2(sum
120597 (120595119869)
120597120591
)
119865120576 119909
= Γ2sin 120579
119865120576 119910
= Γ2cos 120579
119865120576120579119909
= Γ2120593119869
119865120576120579119910
= Γ2120595119869
(8)
The perturbed quality into the orifice diameter can beobtained by Taylor expansion
119876119894119899
= 120582(1 minus 1198751199030)12
minus
120582
2
(1 minus 1198751199030)minus12
(119875119903minus 1198751199030) (9)
Substitution of the perturbed equations (5)ndash(7) intothe continuity equation yields the zeroth- and first-orderexpressions
120582radic(1 minus 1198751199030) = int
1198781+1198783
(
61205830119871119903Ω
1198751199041198882
1198670119894119895
minus
12119871
119903
1198661199091198673
0119894119895
120583
1205971198750
120597120593
)119889120582
+ int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
1205971198750
120597120582
119889120593
minus
120582
2
(1 minus 1198751199030)minus12
119875120585
=
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
sdot sin 120579119894119895119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895sin 120579119894119895
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576119909
120597120593
119889120582
+int
1198782+1198784
12119903
119871
11986611991131198672
0119894119895sin 120579119894119895
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576119909
120597120582
119889120593
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
cos 120579119894119895119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895cos 120579119894119895
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576119910
120597120593
119889120582
+int
1198782+1198784
12119903
119871
31198661199111198672
0119894119895cos 120579119894119895
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576119910
120597120582
119889120593
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
120593119869119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895120593119869
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579119909
120597120593
119889120582
+int
1198782+1198784
12119903
119871
31198661199111198672
0119894119895120593119869
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579119909
120597120582
119889120593
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
120595119869119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895120595119869
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579119910
120597120593
119889120582
+int
1198782+1198784
12119903
119871
31198661199111198672
0119894119895120595119869
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579119910
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576 119909
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576 119909
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576 119910
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576 119910
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579 119909
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579 119909
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579 119910
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579 119910
120597120582
119889120593
(10)
Mathematical Problems in Engineering 5
The finite difference method (FDM) and a successiveover-relaxation (SOR) scheme are implemented to solve (1)ndash(10) to find the pressure distribution When the steady andperturbed pressure distributions are obtained the static anddynamic coefficients can be solved
24 Static Characteristics The quality frictional power lossand pump power are calculated by integration of the pressurefield on the bearing surfaces
119876119894119899
= 120582radic1 minus 119875119903 (11)
ℎ119891=
120583(119903Ω)2
ℎ0
∬119903119889120593119889119911 +
120583Ω2
ℎ0
∬1199033
119889119903 119889120593 (12)
ℎ119901= 119875119904119876 (13)
San Andres et al carried out a systematic research on thewater-lubricated hydrostatic journal bearings both theoreti-cally and experimentally [17] Numerical and experimentalresults show that predictions of the bearing performancecharacteristics like flow rate load capacity and rotor dynamicforce coefficients are not affected by the small temperaturevariations (Δ119879 lt 10
∘C) in the water hydrostatic journalbearings As a result an adiabatic isothermal assumption ismade in this study All the heat produced in the bearings byfriction is considered absorbed by water film The averageelevated temperature is given by
Δ119879 =
ℎ119891+ ℎ119901
119876120588119862V (14)
where 120588 is the density of water and 119862V is the specific heatcapacity of water
25 Dynamic Characteristics The dynamic coefficients ofthe journal bearings can be calculated by integrating theperturbed pressure across the fluid filmThere are 16 stiffnessand damping coefficients and the dynamic coefficients can begrouped into four categories coefficients of force to displace-ment coefficients of force to angle coefficients of moment toangle and coefficients of moment to displacement
[119870119869] =
[
[
[
[
[
[
[
119870119909119909
119870119909119910
119870119909120579119909
119870119909120579119910
119870119910119909
119870119910119910
119870119910120579119909
119870119910120579119910
119870119872119909119909
119870119872119909119910
119870119872119909120579119909
119870119872119909120579119909
119870119872119910119909
119870119872119910119910
119870119872119909120579119909
119870119872119909120579119909
]
]
]
]
]
]
]119869
= minus∬
[
[
[
[
[
[
sin 120579
cos 120579minus120574119897119894119895cos 120579
120574119897119894119895sin 120579
]
]
]
]
]
]
[119875119909119875119910
119875120579119909
119875120579119910] 119889120593 119889120582
Table 1 Operating condition of the test bearing [17]
Orifice diameter (mm) 249 Supply temperature (∘C) 55Length (mm) 762 Supply pressure (MPa) 4Film thickness (um) 127 Rotary speed (rpm) 24600
41∘
R381
Figure 3 Geometry of the test water-lubricated hydrostatic journalbearing [17]
[119861119869] =
[
[
[
[
[
[
[
119887119909119909
119887119909119910
119887119909120579119909
119887119909120579119910
119887119910119909
119887119910119910
119887119910120579119909
119887119910120579119910
119887119872119909119909
119887119872119909119910
119887119872119909120579119909
119887119872119909120579119909
119887119872119910119909
119887119872119910119910
119887119872119909120579119909
119887119872119909120579119909
]
]
]
]
]
]
]119869
= minus∬
[
[
[
[
[
[
sin 120579
cos 120579minus120574119897119894119895cos 120579
120574119897119894119895sin 120579
]
]
]
]
]
]
[119875 119909119875119910119875 120579119909
119875 120579119910] 119889120593 119889120582
(15)
26 The Numerical Solution Procedure The finite differencemethod (FDM) and a successive over-relaxation (SOR)scheme are implemented to solve (1)ndash(10) governing theflow in the film to find the pressure distribution The over-relaxation factor always lies between (1sim2) By trial and errorone can determine an optimum value of the relaxation factorfor the fastest convergence Normally 17 is a good startingpoint for determining the relaxation factor [18] In thenumerical procedure implemented any negative pressurescalculated in the cavitation zone are arbitrarily set equalto zero (or ambient) pressure [18] The pressure iterationsare continued until the following convergence criterion issatisfied
sum119898
119895=1sum119899
119894=1
10038161003816100381610038161003816119875(119896)
119894119895minus 119875(119896minus1)
119894119895
10038161003816100381610038161003816
sum119898
119895=1sum119899
119894=1
10038161003816100381610038161003816119875(119896)
119894119895
10038161003816100381610038161003816
le 120575 (16)
where 120575 is the convergence criteria which is set as 10minus3
Once the pressure field is established for the water filmother performance parameters follow from the pressuredistributionThe steady and perturbed pressure distributions
6 Mathematical Problems in Engineering
00 01 02 03 04 05
0
1000
2000
3000
4000
5000
6000
7000
8000Lo
ad ca
paci
ty (N
)
Eccentricity ratio
Experimental resultsNumerical predictions
minus1000
(a) Comparison of load capacity
00 01 02 03 04 0500
04
08
12
16
20
Mas
s flow
rate
(kg
s)
Eccentricity ratio
Experimental resultsNumerical predictions
(b) Comparison of mass flow rate
Figure 4 Comparison of static performance of experimental results[17] and numerical predictions in respect to eccentricity ratio
obtained are subsequently integrated to yield the desiredstatic and dynamic coefficients
The fluid film was discretized by rectangular grid withunequal intervals which are 0033 0088 and 01154 forthe film land recess and return groove respectively in thecircumferential direction and 002 and 004 for the film landand recess area in the axial direction The total number ofthe grid is 31 times 102 It takes about 35 seconds for the staticperformance to achieve convergence A few validation testsweremade with a coarser grid of 31 times 86 and finer grid of 37 times
158 with different intervals and in no case did the predictedresults of the static characteristics differ by more than 01percent from those obtained by the initial grid
3 Results and Discussion
31 Comparisons of Present Solution with ExperimentalResults The present numerical solution has been correlated
Front bearingRear bearing
00 01 02 03 04 05 06 07 08 09 10218
220
222
224
226
228
230
232
234
236
Qua
lity
(Lm
in)
Tilting ratiominus01
(a) The effect of tilting angle on the quality
Front bearingRear bearing
00 01 02 03 04 05 06 07 08 09 10240242244246248250252254256258260262264
Gro
ss p
ower
loss
(W)
Tilting ratiominus01
(b) The effect of tilting angle on the power loss
00 01 02 03 04 05 06 07 08 09 10148
152
156
160
164
168
172
Tilting ratio
Tem
pera
ture
rise
(∘C)
minus01
Front bearingRear bearing
(c) The effect of tilting angle on the temperature rise
Figure 5 The effect of tilting angle on the static performance of thewater-lubricated bearing
Mathematical Problems in Engineering 7
00 01 02 03 04 05 06 07 08
00
05
10
15
20
25
30
35
Stiff
ness
of f
orce
to d
ispla
cem
ent (
Nm
)
Tilting ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
Eccentricity ratio = 0
minus05
minus10
minus15
minus01
times108
(a) The stiffness of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Tilting ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus tilting ratio
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
00 01 02 03 04 05 06 07 08
00
05
10
15
20
25
30
35
40
Tilting ratio
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
Eccentricity ratio = 0times10
6
minus05
minus10
minus15
minus01
(c) The stiffness of moment to angle versus tilting ratio
Tilting ratio00 01 02 03 04 05 06 07 08
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
Eccentricity ratio = 0times10
7
minus1
minus2
minus3
minus4
minus01
(d) The stiffness of moment to displacement versus tilting ratio
Figure 6 The effect of tilting ratio on the stiffness
and validated with the experimental results available inthe literature A five-recess turbulent-flow water-lubricatedhydrostatic bearing operating at a high rotational speed istested by San Andres et al [17] Table 1 shows the bearingdescription and operating conditions and Figure 3 shows theschematic of the bearing Figure 4 shows a comparison ofmeasured load capacity and flow rate and the numerical pre-dictions in respect to eccentricity ratio As shown in Figure 4a good agreement is observed between the present numericalpredictions and the experimental results available in the
reference The calculated load capacity results correlate wellwith the experimental results with a maximum differenceof 115 The average of the flow rate for the experimentalresults is about 12 kgs while that for the numerical resultsis approximately 145 kgs
32 Effects of Tilting Ratio on the Static Performances of theBearings The geometric parameters for the bearings havebeen presented in Figure 1 the supply pressure is 15MPa the
8 Mathematical Problems in Engineering
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
Tilting ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
Eccentricity ratio = 0
minus04
minus01
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
000408121620242832
Tilting ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus12
minus16
minus20
minus24
minus28
minus32
minus01
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
32
Tilting ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus01
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Tilting ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
times104
(d) The damping of moment to displacement versus tilting ratio
Figure 7 The effect of tilting ratio on the damping coefficients
orifice diameter is 06mm the pressurized water is suppliedat a temperature of 30∘C and the viscosity is 000087 Pa sdot s
Figure 1 shows the coordinate system for the tiltingmotion of the rotor As the film variation of each bearingvaries with different values for the tilting angles and bearingspan the tilting ratio is proposed here to investigate the effectof misalignment The tilting ratio is defined as follows
120581 =
119897119898radic1205792
119909+ 1205792
119910
119888
(17)
where 119897119898is the distance between the titling center and the left
edge of the front bearing or the right edge of the rear bearingwhich is shown in Figure 1
In order to obtain a better physical insight into theeffect of misalignment the static characteristics have beenpresented with eccentricity ratio equal to zero Figures 5(a)ndash5(c) show the calculated quality power loss and temperaturerise for different values of tilting ratios for each journalbearing operating at 10000 rpm It is observed that the qualityof each bearing undergoes a reduction by only 63 when
Mathematical Problems in Engineering 9
5000 10000 15000 20000 25000 3000020
21
22
23
24
25G
ross
qua
lity
(Lm
in)
Rotary speed (rpm)
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
5000 10000 15000 20000 25000 300000
200
400
600
800
1000
1200
1400
Rotary speed (rpm)
Gro
ss p
ower
loss
(W)
(b) The effect of rotary speed on the power loss
5000 10000 15000 20000 25000 300000
1
2
3
4
5
6
7
8
9
10
Rotary speed (rpm)
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 8 The effect of rotary speed on the static performance of the water-lubricated bearing
the tilting ratio increases from zero to 075 The total powerloss of each bearing keeps almost unchanged when the tiltingratio is not greater than 04 However when the tiltingratio continues to increase the power loss gets a slightincrease by approximately 5 Meanwhile the temperaturerise increases with increased tilting ratio The reason for thisis that increasing tilting angles will increase the film variationof each bearing which promote the hydrodynamic andturbulent effect It is noticed that the maximum temperaturerise for the investigated water-lubricated bearing is 17∘C forthe rotor-bearing system investigated here which is far lowerthan the conventional oil film bearings This in turn verifiesthe validation of the adiabatic assumption In conclusionwhen the tilting ratio is smaller than 04 the influence oftilting ratio on the static performance of a water-lubricatedhydrostatic journal bearing can be ignored
33 Effects of Tilting Ratio on the Dynamic Characteristicsof the Bearings Figures 6 and 7 show the variation of thedynamic coefficients of the two identical bearings in respectto the tilting ratio with a rotary speed of 10000 rpm Theeccentricity ratio is assumed to be zero to exclude the effectof the clearance change due to the eccentricity ratioThe solidlines represent the dynamic coefficients of the front journalbearing while the dotted lines represent those of the rearbearing
According to the results the dynamic coefficients of forceto displacement andmoment to angle for the front bearing areapproximately equal to those for the rear bearing due to thefact that the tilting center almost coincides with the bearingspan center However the coupled dynamic coefficients offorce to angle and moment to displacement for the twobearings have close proximitymagnitudes but in the opposite
10 Mathematical Problems in Engineering
5000 10000 15000 20000 25000 30000
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Rotary speed (rpm)
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
minus3
minus4
times108
(a) The stiffness of force to displacement versys rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Rotary speed (rpm)
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(b) The stiffness of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times106
(c) The stiffness of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(d) The stiffness ofmoment to displacement versus rotary speed
Figure 9 The effect of rotary speed on the stiffness coefficients
direction due to the fact that the two bearings are arranged atboth sides of the mass center which is the origin of the tiltingmotions It is observed that with the increase of the tiltingratio the stiffness and damping coefficients of the bearingskeep almost independent of the tilting ratio when it is notlarger than 04 however when the tilting ratio continuesto increase the effect on dynamic coefficients is significantwith a maximum variation rate of 167 for the stiffnessand 492 for the damping coefficients Furthermore thelarger the tilting ratio is the greater the differences amongthe coefficients are This can be ascribed to the variations
of the film thickness induced by the tilting angles andbearing span which can be calculated according to (5) Theresults indicate that for a small tilting ratio the effect ofthe misalignment on the performance of hydrostatic water-lubricated journal bearings can be ignored but for a relativelygreater tilting ratio the effect of misalignment should betaken into consideration
34 Effects of Rotary Speed on the Static Performances ofthe Bearings Figure 8 depicts the variation of the staticcharacteristics for each journal bearing in respect to
Mathematical Problems in Engineering 11
5000 10000 15000 20000 25000 30000
00
02
04
06
08
10
12
14
16
Rotary speed (rpm)
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus02
minus04
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus04
minus08
minus12
minus16
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
minus04
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Rotary speed (rpm)
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
minus04
minus08
minus12
minus16
minus20
times104
(d) The damping of moment to displacement versus rotary speed
Figure 10 The effect of rotary speed on the damping coefficients
the rotary speed In the case of a water-lubricated hydrostaticbearing operating with eccentricity ratio and tilting anglesequal to zero it may be observed that the static characteristicsof the front bearing are the same as those of the rearbearing As shown in Figure 8(a) the quality of each bearingapparently remains unchanged with increased rotary speedAs shown in Figures 8(b) and 8(c) the gross power loss foreach bearing increases dramatically from 123W to 1232Wwhen the rotary speed increases from 5000 rpm to 30000 rpmbecause the frictional power loss is closely related to therotary speed according to (12) Furthermore the temperature
rise undergoes a sharp increase from07∘C to 8∘C It should bepointed out that most of the predicted temperature rises arehigher than the actual values presumably due to the adiabaticassumption imposed on the analysis Considering the valuesof the temperature rise the adiabatic flow assumption is fullyjustified for the bearing studied However when the rotaryspeed continues to increase the energy equation should beincluded to predict the temperature rise precisely
35 Effects of Rotary Speed on the Dynamic Characteristics ofthe Bearings Figures 9 and 10 show the dynamic coefficients
12 Mathematical Problems in Engineering
00 01 02 03 04 05220
225
230
235
240G
ross
qua
lity
(Lm
in)
Eccentricity ratio
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
00 01 02 03 04 05240
241
242
243
244
245
246
247
248
249
250
Gro
ss p
ower
loss
(W)
Eccentricity ratio
(b) The effect of rotary speed on the power loss
00 01 02 03 04 05148
150
152
154
156
158
160
Eccentricity ratio
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 11 The effect of eccentricity ratio on the static performance of the water-lubricated bearing
of each water-lubricated bearing in respect to the rotaryspeedThe eccentricity ratio and tilting angles are assumed aszero to exclude their influences on the film thickness Accord-ing to the results a higher rotary speed generates largercoupled stiffness of force to displacement and moment toangle but the influence of rotary speed on the relative directcoefficients is smallThe direct stiffness coefficients of force toangle and moment to displacement are relatively insensitiveto the variation of the rotary speed The magnitudes of thecross-coupled stiffness of force to displacement and momentto angle are comparable to those of the direct stiffnesswhich demonstrates the importance of hydrodynamic effectsUnlike the stiffness the damping coefficients are independentof the rotary speed in the aligned condition The reasonfor this is that the perturbed pressure due to the perturbedvelocity is not related to the rotary speed of the rotor
36 Effects of Eccentricity Ratio on the Static Performances ofthe Bearings The influence of eccentricity ratio in alignedcondition on static performances of each bearing is as shownin Figure 11 The tilting ratio is assumed as zero to excludethe influence of tilting effect Figure 11(a) indicates that thevalue of quality for each bearing decreases slowly with theeccentricity ratio As is shown in Figure 11(b) the powerloss is almost constant at first and then increases withincreased eccentricity ratio The maximum temperature riseacross the bearing length is about 16∘C at the eccentricityratio equal to 05 This is expected since a smaller clearanceproduces a larger frictional power loss and a smaller flowrate However it should be pointed out that in the alignedcondition the static characteristics of the hydrostatic water-lubricated journal bearings vary slightly with eccentricityratio
Mathematical Problems in Engineering 13
00 01 02 03 04 05
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Eccentricity ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
times108
(a) The stiffness of force to displacement versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Eccentricity ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
times106
minus1
minus2
(c) The stiffness of moment to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
times107
minus1
minus2
minus3
minus4
(d) The stiffness of moment to displacement versus eccentricityratio
Figure 12 The effect of eccentricity ratio on the stiffness coefficients
37 Effects of Eccentricity Ratio on the Dynamic Characteristicsof the Bearings Figures 12 and 13 show a variation ofstiffness and damping coefficients of each bearing versusthe eccentricity ratio It may be noticed that the dynamiccoefficients are almost constant as the eccentricity ratioincreases from 0 to 01 The direct stiffness of force todisplacement and moment to angle decreases gradually withincreased eccentricity ratio Generally the coupled stiffnessvaries significantly with the eccentricity ratio The coupledcoefficients of force to angle and moment to displacement
for the front bearing have the same magnitude as thosefor the rear bearing but in the opposite direction Thedamping coefficients are also relatively insensitive to theeccentricity ratio when it is not larger than 01 However inlarger eccentric condition the damping coefficients vary witheccentricity ratio and the larger the eccentricity ratio is thegreater the coefficients change In summary for the smalleccentric condition (le01) the influence of eccentricity ratioon the full dynamic coefficients for the hydrostatic water-lubricated journal bearing operating in aligned condition can
14 Mathematical Problems in Engineering
00 01 02 03 04 05
00
04
08
12
16
20
Eccentricity ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus04
minus08
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus eccentricity ratio
00 01 02 03 04 05
00
05
10
15
20
Eccentricity ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus05
minus10
minus15
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Eccentricity ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
minus04
minus08
(c) The damping of moment to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Eccentricity ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
times104
minus04
minus08
minus12
minus16
minus20
(d) The damping of moment to displacement versus eccentricityratio
Figure 13 The effect of eccentricity ratio on the damping coefficients
be ignored however for a larger eccentric condition theinfluence should be fully discussed
4 Conclusion
This paper investigated the complete dynamic coefficientsfor two hydrostatic water-lubricated journal bearings usedto support a rigid rotor considering the translational andtilting motion The bulk turbulent flow model and FDMmethod is used to numerically predict the performance of the
bearingsThe results show that the proposedwater-lubricatedhydrostatic bearing has the potential to fulfill the target oflower power loss temperature rise and larger load capacityat high speed On the basis of the results presented thefollowing conclusions can be drawn
(1) For a small tilting ratio (lt04) the influence of tiltingratio on the static and dynamic characteristics of awater-lubricated hydrostatic journal bearing is rela-tively small however when the tilting ratio continues
Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
where Γ1
= 1205830Ω21198751199041205992 Γ2
= 1205830Ω1199011199041205992 120599 = 119888119903 and the
details of the turbulent coefficients 119866119909 119866119911can be obtained as
follows [6 14ndash16]
119881119909= minus119866119909
ℎ2
120583
120597119901
120597119909
+ 119866119869
119880
2
119881119885= minus119866119885
ℎ2
120583
120597119901
120597119911
119877119861=
120588ℎ
120583
[1198812
119909+ 1198812
119885]
12
119877119869=
120588ℎ
120583
[(119881119909minus 119880)2
+ 1198812
119885]
12
119891119869= 0066119877
minus025
119869
119891119861= 0066119877
minus025
119861
119896119869= 119891119869119877119869
119896119861= 119891119861119877119861
119866119909= 119866119911=
2
(119896119869+ 119896119861)
(2)
With the increase of rotary speed or film depth the flow islikely to become turbulent from laminar state The turbulentcoefficients 119866
119909 119866119910 and 119866
119911dependent on the fluid velocity
field are obtained as follows [15]
119866119909= min
1
12
119866119909
119866119910= min
1
12
119866119910
119866119911= min
1
12
119866119911
(3)
At the bearing exit plane the pressure takes a constantvalue equal to the ambient pressure
22 Continuity Equation The dimensionless continuityequation at the recess is defined by the global balancebetween the flow through the orifice restrictor and the recessoutflow into the film lands
120582radic(1 minus 119875119903) = int
1198781+1198783
(
61205830119871119903Ω
1198751199041198882
119867 minus
12119871
119903
1198661199091198673
120583
120597119875
120597120593
)119889120582
+ int
1198782+1198784
12119903
119871
1198661199111198673
120583
120597119875
120597120582
119889120593
(4)
where 120582 = 3radic21205871205721198892
0120583(1198883
radic120588119875119904) 119875119903is the recess pressure
11987813
is the circumferential recess boundary and 11987824
is the axialrecess boundary
23 Perturbation Analysis The journal center rotates aboutits steady-state position (119909
0 1199100 1205791199090 1205791199100) with a small whirl
which is generated from the variations due to the translations
of the rotormass center and variations due to the tilting angles[11ndash13] For small amplitude motions the dimensionless filmthickness and pressure fields are expressed as the sum of azeroth-order field and first-order field describing the steady-state condition and perturbed motion respectively
The dimensionless perturbed film expression consideringthe tilting angles is [12]
119867119894119895
= 1198670119894119895
+ Δ120576119909sdot sin 120579
119894119895+ Δ120576119910sdot cos 120579
119894119895+ 120593119869Δ120579119909+ 120595119869Δ120579119910
1198670119894119895
= 1 + 1205760cos120593119894119895
+ 120593119869120579119909+ 120595119869120579119910
(5)
where
120593119869=
120574119897119894119895cos 120579119909cos 120579119894119895
119888
120595119869= minus
120574119897119894119895cos 120579119910sin 120579119894119895
119888
(6)
where 119897119894119895
is the distance between the grid node of eachbearing and the mass center of the rotor supported on thebearings 120574 = 1 for the front journal bearing and 120574 = minus1 forthe rear journal bearing
The dimensionless perturbed pressure expression is
119875 = 1198750+
120597119875
120597Δ120576119909
Δ120576119909 +
120597119875
120597Δ120576119910
Δ120576119910 +
120597119875
120597Δ120579119909
Δ120579119909+
120597119875
120597Δ120579119910
Δ120579119910
+
120597119875
120597Δ120576
Δ120576 +
120597119875
120597Δ120576 119910
Δ120576 119910 +
120597119875
120597Δ
120579119909
Δ
120579119909+
120597119875
120597Δ
120579119910
Δ
120579119910
(7)
Substitution of the perturbed equations (5)ndash(7) intothe Reynolds equation yields the zeroth- and first-orderexpressions
120597
120597120593
(
1198661199091198673
120583
120597119875120585
120597120593
) +
1199032
1198972(
1198661199111198673
120583
120597119875120585
120597120582
) = 119865120585
(120585 = 0 119909 119910 120579119909 120579119910 119910
120579119909
120579119910)
1198650= Γ1
1205971198670
120597120593
119865120576119909
= minus
120597
120597120593
[
11986611990931198672
0
120583
sin 120579
1205971198750
120597120593
]
minus
1199032
1198972
120597
120597120582
[
11986611991131198672
0
120583
sin 120579
1205971198750
120597120582
]
+ Γ1(sum
120597 (sin 120579)
120597120593
) + Γ2(sum
120597 (sin 120579)
120597120591
)
119865120576119910
= minus
120597
120597120593
[
11986611990931198672
0
120583
cos 1205791205971198750
120597120593
]
minus
1199032
1198972
120597
120597120582
[
11986611991131198672
0
120583
cos 1205791205971198750
120597120582
]
4 Mathematical Problems in Engineering
+ Γ1(sum
120597 (cos 120579)120597120593
) + Γ2(sum
120597 (cos 120579)120597120591
)
119865120579119909
= minus
120597
120597120593
[
11986611990931198672
0
120583
120593119869
1205971198750
120597120593
] minus
1199032
1198972
120597
120597120582
[
11986611991131198672
0
120583
120593119869
1205971198750
120597120582
]
+ Γ1(sum
120597 (120593119869)
120597120593
) + Γ2(sum
120597 (120593119869)
120597120591
)
119865120579119910
= minus
120597
120597120593
[
11986611990931198672
0
120583
120595119869
1205971198750
120597120593
] minus
1199032
1198972
120597
120597120582
[
11986611991131198672
0
120583
120595119869
1205971198750
120597120582
]
+ Γ1(sum
120597 (120595119869)
120597120593
) + Γ2(sum
120597 (120595119869)
120597120591
)
119865120576 119909
= Γ2sin 120579
119865120576 119910
= Γ2cos 120579
119865120576120579119909
= Γ2120593119869
119865120576120579119910
= Γ2120595119869
(8)
The perturbed quality into the orifice diameter can beobtained by Taylor expansion
119876119894119899
= 120582(1 minus 1198751199030)12
minus
120582
2
(1 minus 1198751199030)minus12
(119875119903minus 1198751199030) (9)
Substitution of the perturbed equations (5)ndash(7) intothe continuity equation yields the zeroth- and first-orderexpressions
120582radic(1 minus 1198751199030) = int
1198781+1198783
(
61205830119871119903Ω
1198751199041198882
1198670119894119895
minus
12119871
119903
1198661199091198673
0119894119895
120583
1205971198750
120597120593
)119889120582
+ int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
1205971198750
120597120582
119889120593
minus
120582
2
(1 minus 1198751199030)minus12
119875120585
=
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
sdot sin 120579119894119895119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895sin 120579119894119895
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576119909
120597120593
119889120582
+int
1198782+1198784
12119903
119871
11986611991131198672
0119894119895sin 120579119894119895
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576119909
120597120582
119889120593
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
cos 120579119894119895119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895cos 120579119894119895
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576119910
120597120593
119889120582
+int
1198782+1198784
12119903
119871
31198661199111198672
0119894119895cos 120579119894119895
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576119910
120597120582
119889120593
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
120593119869119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895120593119869
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579119909
120597120593
119889120582
+int
1198782+1198784
12119903
119871
31198661199111198672
0119894119895120593119869
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579119909
120597120582
119889120593
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
120595119869119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895120595119869
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579119910
120597120593
119889120582
+int
1198782+1198784
12119903
119871
31198661199111198672
0119894119895120595119869
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579119910
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576 119909
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576 119909
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576 119910
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576 119910
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579 119909
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579 119909
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579 119910
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579 119910
120597120582
119889120593
(10)
Mathematical Problems in Engineering 5
The finite difference method (FDM) and a successiveover-relaxation (SOR) scheme are implemented to solve (1)ndash(10) to find the pressure distribution When the steady andperturbed pressure distributions are obtained the static anddynamic coefficients can be solved
24 Static Characteristics The quality frictional power lossand pump power are calculated by integration of the pressurefield on the bearing surfaces
119876119894119899
= 120582radic1 minus 119875119903 (11)
ℎ119891=
120583(119903Ω)2
ℎ0
∬119903119889120593119889119911 +
120583Ω2
ℎ0
∬1199033
119889119903 119889120593 (12)
ℎ119901= 119875119904119876 (13)
San Andres et al carried out a systematic research on thewater-lubricated hydrostatic journal bearings both theoreti-cally and experimentally [17] Numerical and experimentalresults show that predictions of the bearing performancecharacteristics like flow rate load capacity and rotor dynamicforce coefficients are not affected by the small temperaturevariations (Δ119879 lt 10
∘C) in the water hydrostatic journalbearings As a result an adiabatic isothermal assumption ismade in this study All the heat produced in the bearings byfriction is considered absorbed by water film The averageelevated temperature is given by
Δ119879 =
ℎ119891+ ℎ119901
119876120588119862V (14)
where 120588 is the density of water and 119862V is the specific heatcapacity of water
25 Dynamic Characteristics The dynamic coefficients ofthe journal bearings can be calculated by integrating theperturbed pressure across the fluid filmThere are 16 stiffnessand damping coefficients and the dynamic coefficients can begrouped into four categories coefficients of force to displace-ment coefficients of force to angle coefficients of moment toangle and coefficients of moment to displacement
[119870119869] =
[
[
[
[
[
[
[
119870119909119909
119870119909119910
119870119909120579119909
119870119909120579119910
119870119910119909
119870119910119910
119870119910120579119909
119870119910120579119910
119870119872119909119909
119870119872119909119910
119870119872119909120579119909
119870119872119909120579119909
119870119872119910119909
119870119872119910119910
119870119872119909120579119909
119870119872119909120579119909
]
]
]
]
]
]
]119869
= minus∬
[
[
[
[
[
[
sin 120579
cos 120579minus120574119897119894119895cos 120579
120574119897119894119895sin 120579
]
]
]
]
]
]
[119875119909119875119910
119875120579119909
119875120579119910] 119889120593 119889120582
Table 1 Operating condition of the test bearing [17]
Orifice diameter (mm) 249 Supply temperature (∘C) 55Length (mm) 762 Supply pressure (MPa) 4Film thickness (um) 127 Rotary speed (rpm) 24600
41∘
R381
Figure 3 Geometry of the test water-lubricated hydrostatic journalbearing [17]
[119861119869] =
[
[
[
[
[
[
[
119887119909119909
119887119909119910
119887119909120579119909
119887119909120579119910
119887119910119909
119887119910119910
119887119910120579119909
119887119910120579119910
119887119872119909119909
119887119872119909119910
119887119872119909120579119909
119887119872119909120579119909
119887119872119910119909
119887119872119910119910
119887119872119909120579119909
119887119872119909120579119909
]
]
]
]
]
]
]119869
= minus∬
[
[
[
[
[
[
sin 120579
cos 120579minus120574119897119894119895cos 120579
120574119897119894119895sin 120579
]
]
]
]
]
]
[119875 119909119875119910119875 120579119909
119875 120579119910] 119889120593 119889120582
(15)
26 The Numerical Solution Procedure The finite differencemethod (FDM) and a successive over-relaxation (SOR)scheme are implemented to solve (1)ndash(10) governing theflow in the film to find the pressure distribution The over-relaxation factor always lies between (1sim2) By trial and errorone can determine an optimum value of the relaxation factorfor the fastest convergence Normally 17 is a good startingpoint for determining the relaxation factor [18] In thenumerical procedure implemented any negative pressurescalculated in the cavitation zone are arbitrarily set equalto zero (or ambient) pressure [18] The pressure iterationsare continued until the following convergence criterion issatisfied
sum119898
119895=1sum119899
119894=1
10038161003816100381610038161003816119875(119896)
119894119895minus 119875(119896minus1)
119894119895
10038161003816100381610038161003816
sum119898
119895=1sum119899
119894=1
10038161003816100381610038161003816119875(119896)
119894119895
10038161003816100381610038161003816
le 120575 (16)
where 120575 is the convergence criteria which is set as 10minus3
Once the pressure field is established for the water filmother performance parameters follow from the pressuredistributionThe steady and perturbed pressure distributions
6 Mathematical Problems in Engineering
00 01 02 03 04 05
0
1000
2000
3000
4000
5000
6000
7000
8000Lo
ad ca
paci
ty (N
)
Eccentricity ratio
Experimental resultsNumerical predictions
minus1000
(a) Comparison of load capacity
00 01 02 03 04 0500
04
08
12
16
20
Mas
s flow
rate
(kg
s)
Eccentricity ratio
Experimental resultsNumerical predictions
(b) Comparison of mass flow rate
Figure 4 Comparison of static performance of experimental results[17] and numerical predictions in respect to eccentricity ratio
obtained are subsequently integrated to yield the desiredstatic and dynamic coefficients
The fluid film was discretized by rectangular grid withunequal intervals which are 0033 0088 and 01154 forthe film land recess and return groove respectively in thecircumferential direction and 002 and 004 for the film landand recess area in the axial direction The total number ofthe grid is 31 times 102 It takes about 35 seconds for the staticperformance to achieve convergence A few validation testsweremade with a coarser grid of 31 times 86 and finer grid of 37 times
158 with different intervals and in no case did the predictedresults of the static characteristics differ by more than 01percent from those obtained by the initial grid
3 Results and Discussion
31 Comparisons of Present Solution with ExperimentalResults The present numerical solution has been correlated
Front bearingRear bearing
00 01 02 03 04 05 06 07 08 09 10218
220
222
224
226
228
230
232
234
236
Qua
lity
(Lm
in)
Tilting ratiominus01
(a) The effect of tilting angle on the quality
Front bearingRear bearing
00 01 02 03 04 05 06 07 08 09 10240242244246248250252254256258260262264
Gro
ss p
ower
loss
(W)
Tilting ratiominus01
(b) The effect of tilting angle on the power loss
00 01 02 03 04 05 06 07 08 09 10148
152
156
160
164
168
172
Tilting ratio
Tem
pera
ture
rise
(∘C)
minus01
Front bearingRear bearing
(c) The effect of tilting angle on the temperature rise
Figure 5 The effect of tilting angle on the static performance of thewater-lubricated bearing
Mathematical Problems in Engineering 7
00 01 02 03 04 05 06 07 08
00
05
10
15
20
25
30
35
Stiff
ness
of f
orce
to d
ispla
cem
ent (
Nm
)
Tilting ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
Eccentricity ratio = 0
minus05
minus10
minus15
minus01
times108
(a) The stiffness of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Tilting ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus tilting ratio
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
00 01 02 03 04 05 06 07 08
00
05
10
15
20
25
30
35
40
Tilting ratio
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
Eccentricity ratio = 0times10
6
minus05
minus10
minus15
minus01
(c) The stiffness of moment to angle versus tilting ratio
Tilting ratio00 01 02 03 04 05 06 07 08
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
Eccentricity ratio = 0times10
7
minus1
minus2
minus3
minus4
minus01
(d) The stiffness of moment to displacement versus tilting ratio
Figure 6 The effect of tilting ratio on the stiffness
and validated with the experimental results available inthe literature A five-recess turbulent-flow water-lubricatedhydrostatic bearing operating at a high rotational speed istested by San Andres et al [17] Table 1 shows the bearingdescription and operating conditions and Figure 3 shows theschematic of the bearing Figure 4 shows a comparison ofmeasured load capacity and flow rate and the numerical pre-dictions in respect to eccentricity ratio As shown in Figure 4a good agreement is observed between the present numericalpredictions and the experimental results available in the
reference The calculated load capacity results correlate wellwith the experimental results with a maximum differenceof 115 The average of the flow rate for the experimentalresults is about 12 kgs while that for the numerical resultsis approximately 145 kgs
32 Effects of Tilting Ratio on the Static Performances of theBearings The geometric parameters for the bearings havebeen presented in Figure 1 the supply pressure is 15MPa the
8 Mathematical Problems in Engineering
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
Tilting ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
Eccentricity ratio = 0
minus04
minus01
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
000408121620242832
Tilting ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus12
minus16
minus20
minus24
minus28
minus32
minus01
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
32
Tilting ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus01
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Tilting ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
times104
(d) The damping of moment to displacement versus tilting ratio
Figure 7 The effect of tilting ratio on the damping coefficients
orifice diameter is 06mm the pressurized water is suppliedat a temperature of 30∘C and the viscosity is 000087 Pa sdot s
Figure 1 shows the coordinate system for the tiltingmotion of the rotor As the film variation of each bearingvaries with different values for the tilting angles and bearingspan the tilting ratio is proposed here to investigate the effectof misalignment The tilting ratio is defined as follows
120581 =
119897119898radic1205792
119909+ 1205792
119910
119888
(17)
where 119897119898is the distance between the titling center and the left
edge of the front bearing or the right edge of the rear bearingwhich is shown in Figure 1
In order to obtain a better physical insight into theeffect of misalignment the static characteristics have beenpresented with eccentricity ratio equal to zero Figures 5(a)ndash5(c) show the calculated quality power loss and temperaturerise for different values of tilting ratios for each journalbearing operating at 10000 rpm It is observed that the qualityof each bearing undergoes a reduction by only 63 when
Mathematical Problems in Engineering 9
5000 10000 15000 20000 25000 3000020
21
22
23
24
25G
ross
qua
lity
(Lm
in)
Rotary speed (rpm)
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
5000 10000 15000 20000 25000 300000
200
400
600
800
1000
1200
1400
Rotary speed (rpm)
Gro
ss p
ower
loss
(W)
(b) The effect of rotary speed on the power loss
5000 10000 15000 20000 25000 300000
1
2
3
4
5
6
7
8
9
10
Rotary speed (rpm)
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 8 The effect of rotary speed on the static performance of the water-lubricated bearing
the tilting ratio increases from zero to 075 The total powerloss of each bearing keeps almost unchanged when the tiltingratio is not greater than 04 However when the tiltingratio continues to increase the power loss gets a slightincrease by approximately 5 Meanwhile the temperaturerise increases with increased tilting ratio The reason for thisis that increasing tilting angles will increase the film variationof each bearing which promote the hydrodynamic andturbulent effect It is noticed that the maximum temperaturerise for the investigated water-lubricated bearing is 17∘C forthe rotor-bearing system investigated here which is far lowerthan the conventional oil film bearings This in turn verifiesthe validation of the adiabatic assumption In conclusionwhen the tilting ratio is smaller than 04 the influence oftilting ratio on the static performance of a water-lubricatedhydrostatic journal bearing can be ignored
33 Effects of Tilting Ratio on the Dynamic Characteristicsof the Bearings Figures 6 and 7 show the variation of thedynamic coefficients of the two identical bearings in respectto the tilting ratio with a rotary speed of 10000 rpm Theeccentricity ratio is assumed to be zero to exclude the effectof the clearance change due to the eccentricity ratioThe solidlines represent the dynamic coefficients of the front journalbearing while the dotted lines represent those of the rearbearing
According to the results the dynamic coefficients of forceto displacement andmoment to angle for the front bearing areapproximately equal to those for the rear bearing due to thefact that the tilting center almost coincides with the bearingspan center However the coupled dynamic coefficients offorce to angle and moment to displacement for the twobearings have close proximitymagnitudes but in the opposite
10 Mathematical Problems in Engineering
5000 10000 15000 20000 25000 30000
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Rotary speed (rpm)
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
minus3
minus4
times108
(a) The stiffness of force to displacement versys rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Rotary speed (rpm)
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(b) The stiffness of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times106
(c) The stiffness of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(d) The stiffness ofmoment to displacement versus rotary speed
Figure 9 The effect of rotary speed on the stiffness coefficients
direction due to the fact that the two bearings are arranged atboth sides of the mass center which is the origin of the tiltingmotions It is observed that with the increase of the tiltingratio the stiffness and damping coefficients of the bearingskeep almost independent of the tilting ratio when it is notlarger than 04 however when the tilting ratio continuesto increase the effect on dynamic coefficients is significantwith a maximum variation rate of 167 for the stiffnessand 492 for the damping coefficients Furthermore thelarger the tilting ratio is the greater the differences amongthe coefficients are This can be ascribed to the variations
of the film thickness induced by the tilting angles andbearing span which can be calculated according to (5) Theresults indicate that for a small tilting ratio the effect ofthe misalignment on the performance of hydrostatic water-lubricated journal bearings can be ignored but for a relativelygreater tilting ratio the effect of misalignment should betaken into consideration
34 Effects of Rotary Speed on the Static Performances ofthe Bearings Figure 8 depicts the variation of the staticcharacteristics for each journal bearing in respect to
Mathematical Problems in Engineering 11
5000 10000 15000 20000 25000 30000
00
02
04
06
08
10
12
14
16
Rotary speed (rpm)
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus02
minus04
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus04
minus08
minus12
minus16
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
minus04
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Rotary speed (rpm)
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
minus04
minus08
minus12
minus16
minus20
times104
(d) The damping of moment to displacement versus rotary speed
Figure 10 The effect of rotary speed on the damping coefficients
the rotary speed In the case of a water-lubricated hydrostaticbearing operating with eccentricity ratio and tilting anglesequal to zero it may be observed that the static characteristicsof the front bearing are the same as those of the rearbearing As shown in Figure 8(a) the quality of each bearingapparently remains unchanged with increased rotary speedAs shown in Figures 8(b) and 8(c) the gross power loss foreach bearing increases dramatically from 123W to 1232Wwhen the rotary speed increases from 5000 rpm to 30000 rpmbecause the frictional power loss is closely related to therotary speed according to (12) Furthermore the temperature
rise undergoes a sharp increase from07∘C to 8∘C It should bepointed out that most of the predicted temperature rises arehigher than the actual values presumably due to the adiabaticassumption imposed on the analysis Considering the valuesof the temperature rise the adiabatic flow assumption is fullyjustified for the bearing studied However when the rotaryspeed continues to increase the energy equation should beincluded to predict the temperature rise precisely
35 Effects of Rotary Speed on the Dynamic Characteristics ofthe Bearings Figures 9 and 10 show the dynamic coefficients
12 Mathematical Problems in Engineering
00 01 02 03 04 05220
225
230
235
240G
ross
qua
lity
(Lm
in)
Eccentricity ratio
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
00 01 02 03 04 05240
241
242
243
244
245
246
247
248
249
250
Gro
ss p
ower
loss
(W)
Eccentricity ratio
(b) The effect of rotary speed on the power loss
00 01 02 03 04 05148
150
152
154
156
158
160
Eccentricity ratio
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 11 The effect of eccentricity ratio on the static performance of the water-lubricated bearing
of each water-lubricated bearing in respect to the rotaryspeedThe eccentricity ratio and tilting angles are assumed aszero to exclude their influences on the film thickness Accord-ing to the results a higher rotary speed generates largercoupled stiffness of force to displacement and moment toangle but the influence of rotary speed on the relative directcoefficients is smallThe direct stiffness coefficients of force toangle and moment to displacement are relatively insensitiveto the variation of the rotary speed The magnitudes of thecross-coupled stiffness of force to displacement and momentto angle are comparable to those of the direct stiffnesswhich demonstrates the importance of hydrodynamic effectsUnlike the stiffness the damping coefficients are independentof the rotary speed in the aligned condition The reasonfor this is that the perturbed pressure due to the perturbedvelocity is not related to the rotary speed of the rotor
36 Effects of Eccentricity Ratio on the Static Performances ofthe Bearings The influence of eccentricity ratio in alignedcondition on static performances of each bearing is as shownin Figure 11 The tilting ratio is assumed as zero to excludethe influence of tilting effect Figure 11(a) indicates that thevalue of quality for each bearing decreases slowly with theeccentricity ratio As is shown in Figure 11(b) the powerloss is almost constant at first and then increases withincreased eccentricity ratio The maximum temperature riseacross the bearing length is about 16∘C at the eccentricityratio equal to 05 This is expected since a smaller clearanceproduces a larger frictional power loss and a smaller flowrate However it should be pointed out that in the alignedcondition the static characteristics of the hydrostatic water-lubricated journal bearings vary slightly with eccentricityratio
Mathematical Problems in Engineering 13
00 01 02 03 04 05
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Eccentricity ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
times108
(a) The stiffness of force to displacement versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Eccentricity ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
times106
minus1
minus2
(c) The stiffness of moment to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
times107
minus1
minus2
minus3
minus4
(d) The stiffness of moment to displacement versus eccentricityratio
Figure 12 The effect of eccentricity ratio on the stiffness coefficients
37 Effects of Eccentricity Ratio on the Dynamic Characteristicsof the Bearings Figures 12 and 13 show a variation ofstiffness and damping coefficients of each bearing versusthe eccentricity ratio It may be noticed that the dynamiccoefficients are almost constant as the eccentricity ratioincreases from 0 to 01 The direct stiffness of force todisplacement and moment to angle decreases gradually withincreased eccentricity ratio Generally the coupled stiffnessvaries significantly with the eccentricity ratio The coupledcoefficients of force to angle and moment to displacement
for the front bearing have the same magnitude as thosefor the rear bearing but in the opposite direction Thedamping coefficients are also relatively insensitive to theeccentricity ratio when it is not larger than 01 However inlarger eccentric condition the damping coefficients vary witheccentricity ratio and the larger the eccentricity ratio is thegreater the coefficients change In summary for the smalleccentric condition (le01) the influence of eccentricity ratioon the full dynamic coefficients for the hydrostatic water-lubricated journal bearing operating in aligned condition can
14 Mathematical Problems in Engineering
00 01 02 03 04 05
00
04
08
12
16
20
Eccentricity ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus04
minus08
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus eccentricity ratio
00 01 02 03 04 05
00
05
10
15
20
Eccentricity ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus05
minus10
minus15
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Eccentricity ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
minus04
minus08
(c) The damping of moment to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Eccentricity ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
times104
minus04
minus08
minus12
minus16
minus20
(d) The damping of moment to displacement versus eccentricityratio
Figure 13 The effect of eccentricity ratio on the damping coefficients
be ignored however for a larger eccentric condition theinfluence should be fully discussed
4 Conclusion
This paper investigated the complete dynamic coefficientsfor two hydrostatic water-lubricated journal bearings usedto support a rigid rotor considering the translational andtilting motion The bulk turbulent flow model and FDMmethod is used to numerically predict the performance of the
bearingsThe results show that the proposedwater-lubricatedhydrostatic bearing has the potential to fulfill the target oflower power loss temperature rise and larger load capacityat high speed On the basis of the results presented thefollowing conclusions can be drawn
(1) For a small tilting ratio (lt04) the influence of tiltingratio on the static and dynamic characteristics of awater-lubricated hydrostatic journal bearing is rela-tively small however when the tilting ratio continues
Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
+ Γ1(sum
120597 (cos 120579)120597120593
) + Γ2(sum
120597 (cos 120579)120597120591
)
119865120579119909
= minus
120597
120597120593
[
11986611990931198672
0
120583
120593119869
1205971198750
120597120593
] minus
1199032
1198972
120597
120597120582
[
11986611991131198672
0
120583
120593119869
1205971198750
120597120582
]
+ Γ1(sum
120597 (120593119869)
120597120593
) + Γ2(sum
120597 (120593119869)
120597120591
)
119865120579119910
= minus
120597
120597120593
[
11986611990931198672
0
120583
120595119869
1205971198750
120597120593
] minus
1199032
1198972
120597
120597120582
[
11986611991131198672
0
120583
120595119869
1205971198750
120597120582
]
+ Γ1(sum
120597 (120595119869)
120597120593
) + Γ2(sum
120597 (120595119869)
120597120591
)
119865120576 119909
= Γ2sin 120579
119865120576 119910
= Γ2cos 120579
119865120576120579119909
= Γ2120593119869
119865120576120579119910
= Γ2120595119869
(8)
The perturbed quality into the orifice diameter can beobtained by Taylor expansion
119876119894119899
= 120582(1 minus 1198751199030)12
minus
120582
2
(1 minus 1198751199030)minus12
(119875119903minus 1198751199030) (9)
Substitution of the perturbed equations (5)ndash(7) intothe continuity equation yields the zeroth- and first-orderexpressions
120582radic(1 minus 1198751199030) = int
1198781+1198783
(
61205830119871119903Ω
1198751199041198882
1198670119894119895
minus
12119871
119903
1198661199091198673
0119894119895
120583
1205971198750
120597120593
)119889120582
+ int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
1205971198750
120597120582
119889120593
minus
120582
2
(1 minus 1198751199030)minus12
119875120585
=
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
sdot sin 120579119894119895119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895sin 120579119894119895
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576119909
120597120593
119889120582
+int
1198782+1198784
12119903
119871
11986611991131198672
0119894119895sin 120579119894119895
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576119909
120597120582
119889120593
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
cos 120579119894119895119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895cos 120579119894119895
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576119910
120597120593
119889120582
+int
1198782+1198784
12119903
119871
31198661199111198672
0119894119895cos 120579119894119895
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576119910
120597120582
119889120593
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
120593119869119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895120593119869
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579119909
120597120593
119889120582
+int
1198782+1198784
12119903
119871
31198661199111198672
0119894119895120593119869
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579119909
120597120582
119889120593
int
1198781+1198783
61205830119871119903Ω
1198751199041198882
120595119869119889120582 minus int
1198781+1198783
12119871
119903
31198661199091198672
0119894119895120595119869
120583
1205971198750
120597120593
119889120582 minus int
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579119910
120597120593
119889120582
+int
1198782+1198784
12119903
119871
31198661199111198672
0119894119895120595119869
120583
1205971198750
120597120582
119889120593 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579119910
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576 119909
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576 119909
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576 119910
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576 119910
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579 119909
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579 119909
120597120582
119889120593
minusint
1198781+1198783
12119871
119903
1198661199091198673
0119894119895
120583
120597119875120576120579 119910
120597120593
119889120582 + int
1198782+1198784
12119903
119871
1198661199111198673
0119894119895
120583
120597119875120576120579 119910
120597120582
119889120593
(10)
Mathematical Problems in Engineering 5
The finite difference method (FDM) and a successiveover-relaxation (SOR) scheme are implemented to solve (1)ndash(10) to find the pressure distribution When the steady andperturbed pressure distributions are obtained the static anddynamic coefficients can be solved
24 Static Characteristics The quality frictional power lossand pump power are calculated by integration of the pressurefield on the bearing surfaces
119876119894119899
= 120582radic1 minus 119875119903 (11)
ℎ119891=
120583(119903Ω)2
ℎ0
∬119903119889120593119889119911 +
120583Ω2
ℎ0
∬1199033
119889119903 119889120593 (12)
ℎ119901= 119875119904119876 (13)
San Andres et al carried out a systematic research on thewater-lubricated hydrostatic journal bearings both theoreti-cally and experimentally [17] Numerical and experimentalresults show that predictions of the bearing performancecharacteristics like flow rate load capacity and rotor dynamicforce coefficients are not affected by the small temperaturevariations (Δ119879 lt 10
∘C) in the water hydrostatic journalbearings As a result an adiabatic isothermal assumption ismade in this study All the heat produced in the bearings byfriction is considered absorbed by water film The averageelevated temperature is given by
Δ119879 =
ℎ119891+ ℎ119901
119876120588119862V (14)
where 120588 is the density of water and 119862V is the specific heatcapacity of water
25 Dynamic Characteristics The dynamic coefficients ofthe journal bearings can be calculated by integrating theperturbed pressure across the fluid filmThere are 16 stiffnessand damping coefficients and the dynamic coefficients can begrouped into four categories coefficients of force to displace-ment coefficients of force to angle coefficients of moment toangle and coefficients of moment to displacement
[119870119869] =
[
[
[
[
[
[
[
119870119909119909
119870119909119910
119870119909120579119909
119870119909120579119910
119870119910119909
119870119910119910
119870119910120579119909
119870119910120579119910
119870119872119909119909
119870119872119909119910
119870119872119909120579119909
119870119872119909120579119909
119870119872119910119909
119870119872119910119910
119870119872119909120579119909
119870119872119909120579119909
]
]
]
]
]
]
]119869
= minus∬
[
[
[
[
[
[
sin 120579
cos 120579minus120574119897119894119895cos 120579
120574119897119894119895sin 120579
]
]
]
]
]
]
[119875119909119875119910
119875120579119909
119875120579119910] 119889120593 119889120582
Table 1 Operating condition of the test bearing [17]
Orifice diameter (mm) 249 Supply temperature (∘C) 55Length (mm) 762 Supply pressure (MPa) 4Film thickness (um) 127 Rotary speed (rpm) 24600
41∘
R381
Figure 3 Geometry of the test water-lubricated hydrostatic journalbearing [17]
[119861119869] =
[
[
[
[
[
[
[
119887119909119909
119887119909119910
119887119909120579119909
119887119909120579119910
119887119910119909
119887119910119910
119887119910120579119909
119887119910120579119910
119887119872119909119909
119887119872119909119910
119887119872119909120579119909
119887119872119909120579119909
119887119872119910119909
119887119872119910119910
119887119872119909120579119909
119887119872119909120579119909
]
]
]
]
]
]
]119869
= minus∬
[
[
[
[
[
[
sin 120579
cos 120579minus120574119897119894119895cos 120579
120574119897119894119895sin 120579
]
]
]
]
]
]
[119875 119909119875119910119875 120579119909
119875 120579119910] 119889120593 119889120582
(15)
26 The Numerical Solution Procedure The finite differencemethod (FDM) and a successive over-relaxation (SOR)scheme are implemented to solve (1)ndash(10) governing theflow in the film to find the pressure distribution The over-relaxation factor always lies between (1sim2) By trial and errorone can determine an optimum value of the relaxation factorfor the fastest convergence Normally 17 is a good startingpoint for determining the relaxation factor [18] In thenumerical procedure implemented any negative pressurescalculated in the cavitation zone are arbitrarily set equalto zero (or ambient) pressure [18] The pressure iterationsare continued until the following convergence criterion issatisfied
sum119898
119895=1sum119899
119894=1
10038161003816100381610038161003816119875(119896)
119894119895minus 119875(119896minus1)
119894119895
10038161003816100381610038161003816
sum119898
119895=1sum119899
119894=1
10038161003816100381610038161003816119875(119896)
119894119895
10038161003816100381610038161003816
le 120575 (16)
where 120575 is the convergence criteria which is set as 10minus3
Once the pressure field is established for the water filmother performance parameters follow from the pressuredistributionThe steady and perturbed pressure distributions
6 Mathematical Problems in Engineering
00 01 02 03 04 05
0
1000
2000
3000
4000
5000
6000
7000
8000Lo
ad ca
paci
ty (N
)
Eccentricity ratio
Experimental resultsNumerical predictions
minus1000
(a) Comparison of load capacity
00 01 02 03 04 0500
04
08
12
16
20
Mas
s flow
rate
(kg
s)
Eccentricity ratio
Experimental resultsNumerical predictions
(b) Comparison of mass flow rate
Figure 4 Comparison of static performance of experimental results[17] and numerical predictions in respect to eccentricity ratio
obtained are subsequently integrated to yield the desiredstatic and dynamic coefficients
The fluid film was discretized by rectangular grid withunequal intervals which are 0033 0088 and 01154 forthe film land recess and return groove respectively in thecircumferential direction and 002 and 004 for the film landand recess area in the axial direction The total number ofthe grid is 31 times 102 It takes about 35 seconds for the staticperformance to achieve convergence A few validation testsweremade with a coarser grid of 31 times 86 and finer grid of 37 times
158 with different intervals and in no case did the predictedresults of the static characteristics differ by more than 01percent from those obtained by the initial grid
3 Results and Discussion
31 Comparisons of Present Solution with ExperimentalResults The present numerical solution has been correlated
Front bearingRear bearing
00 01 02 03 04 05 06 07 08 09 10218
220
222
224
226
228
230
232
234
236
Qua
lity
(Lm
in)
Tilting ratiominus01
(a) The effect of tilting angle on the quality
Front bearingRear bearing
00 01 02 03 04 05 06 07 08 09 10240242244246248250252254256258260262264
Gro
ss p
ower
loss
(W)
Tilting ratiominus01
(b) The effect of tilting angle on the power loss
00 01 02 03 04 05 06 07 08 09 10148
152
156
160
164
168
172
Tilting ratio
Tem
pera
ture
rise
(∘C)
minus01
Front bearingRear bearing
(c) The effect of tilting angle on the temperature rise
Figure 5 The effect of tilting angle on the static performance of thewater-lubricated bearing
Mathematical Problems in Engineering 7
00 01 02 03 04 05 06 07 08
00
05
10
15
20
25
30
35
Stiff
ness
of f
orce
to d
ispla
cem
ent (
Nm
)
Tilting ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
Eccentricity ratio = 0
minus05
minus10
minus15
minus01
times108
(a) The stiffness of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Tilting ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus tilting ratio
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
00 01 02 03 04 05 06 07 08
00
05
10
15
20
25
30
35
40
Tilting ratio
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
Eccentricity ratio = 0times10
6
minus05
minus10
minus15
minus01
(c) The stiffness of moment to angle versus tilting ratio
Tilting ratio00 01 02 03 04 05 06 07 08
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
Eccentricity ratio = 0times10
7
minus1
minus2
minus3
minus4
minus01
(d) The stiffness of moment to displacement versus tilting ratio
Figure 6 The effect of tilting ratio on the stiffness
and validated with the experimental results available inthe literature A five-recess turbulent-flow water-lubricatedhydrostatic bearing operating at a high rotational speed istested by San Andres et al [17] Table 1 shows the bearingdescription and operating conditions and Figure 3 shows theschematic of the bearing Figure 4 shows a comparison ofmeasured load capacity and flow rate and the numerical pre-dictions in respect to eccentricity ratio As shown in Figure 4a good agreement is observed between the present numericalpredictions and the experimental results available in the
reference The calculated load capacity results correlate wellwith the experimental results with a maximum differenceof 115 The average of the flow rate for the experimentalresults is about 12 kgs while that for the numerical resultsis approximately 145 kgs
32 Effects of Tilting Ratio on the Static Performances of theBearings The geometric parameters for the bearings havebeen presented in Figure 1 the supply pressure is 15MPa the
8 Mathematical Problems in Engineering
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
Tilting ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
Eccentricity ratio = 0
minus04
minus01
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
000408121620242832
Tilting ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus12
minus16
minus20
minus24
minus28
minus32
minus01
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
32
Tilting ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus01
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Tilting ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
times104
(d) The damping of moment to displacement versus tilting ratio
Figure 7 The effect of tilting ratio on the damping coefficients
orifice diameter is 06mm the pressurized water is suppliedat a temperature of 30∘C and the viscosity is 000087 Pa sdot s
Figure 1 shows the coordinate system for the tiltingmotion of the rotor As the film variation of each bearingvaries with different values for the tilting angles and bearingspan the tilting ratio is proposed here to investigate the effectof misalignment The tilting ratio is defined as follows
120581 =
119897119898radic1205792
119909+ 1205792
119910
119888
(17)
where 119897119898is the distance between the titling center and the left
edge of the front bearing or the right edge of the rear bearingwhich is shown in Figure 1
In order to obtain a better physical insight into theeffect of misalignment the static characteristics have beenpresented with eccentricity ratio equal to zero Figures 5(a)ndash5(c) show the calculated quality power loss and temperaturerise for different values of tilting ratios for each journalbearing operating at 10000 rpm It is observed that the qualityof each bearing undergoes a reduction by only 63 when
Mathematical Problems in Engineering 9
5000 10000 15000 20000 25000 3000020
21
22
23
24
25G
ross
qua
lity
(Lm
in)
Rotary speed (rpm)
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
5000 10000 15000 20000 25000 300000
200
400
600
800
1000
1200
1400
Rotary speed (rpm)
Gro
ss p
ower
loss
(W)
(b) The effect of rotary speed on the power loss
5000 10000 15000 20000 25000 300000
1
2
3
4
5
6
7
8
9
10
Rotary speed (rpm)
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 8 The effect of rotary speed on the static performance of the water-lubricated bearing
the tilting ratio increases from zero to 075 The total powerloss of each bearing keeps almost unchanged when the tiltingratio is not greater than 04 However when the tiltingratio continues to increase the power loss gets a slightincrease by approximately 5 Meanwhile the temperaturerise increases with increased tilting ratio The reason for thisis that increasing tilting angles will increase the film variationof each bearing which promote the hydrodynamic andturbulent effect It is noticed that the maximum temperaturerise for the investigated water-lubricated bearing is 17∘C forthe rotor-bearing system investigated here which is far lowerthan the conventional oil film bearings This in turn verifiesthe validation of the adiabatic assumption In conclusionwhen the tilting ratio is smaller than 04 the influence oftilting ratio on the static performance of a water-lubricatedhydrostatic journal bearing can be ignored
33 Effects of Tilting Ratio on the Dynamic Characteristicsof the Bearings Figures 6 and 7 show the variation of thedynamic coefficients of the two identical bearings in respectto the tilting ratio with a rotary speed of 10000 rpm Theeccentricity ratio is assumed to be zero to exclude the effectof the clearance change due to the eccentricity ratioThe solidlines represent the dynamic coefficients of the front journalbearing while the dotted lines represent those of the rearbearing
According to the results the dynamic coefficients of forceto displacement andmoment to angle for the front bearing areapproximately equal to those for the rear bearing due to thefact that the tilting center almost coincides with the bearingspan center However the coupled dynamic coefficients offorce to angle and moment to displacement for the twobearings have close proximitymagnitudes but in the opposite
10 Mathematical Problems in Engineering
5000 10000 15000 20000 25000 30000
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Rotary speed (rpm)
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
minus3
minus4
times108
(a) The stiffness of force to displacement versys rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Rotary speed (rpm)
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(b) The stiffness of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times106
(c) The stiffness of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(d) The stiffness ofmoment to displacement versus rotary speed
Figure 9 The effect of rotary speed on the stiffness coefficients
direction due to the fact that the two bearings are arranged atboth sides of the mass center which is the origin of the tiltingmotions It is observed that with the increase of the tiltingratio the stiffness and damping coefficients of the bearingskeep almost independent of the tilting ratio when it is notlarger than 04 however when the tilting ratio continuesto increase the effect on dynamic coefficients is significantwith a maximum variation rate of 167 for the stiffnessand 492 for the damping coefficients Furthermore thelarger the tilting ratio is the greater the differences amongthe coefficients are This can be ascribed to the variations
of the film thickness induced by the tilting angles andbearing span which can be calculated according to (5) Theresults indicate that for a small tilting ratio the effect ofthe misalignment on the performance of hydrostatic water-lubricated journal bearings can be ignored but for a relativelygreater tilting ratio the effect of misalignment should betaken into consideration
34 Effects of Rotary Speed on the Static Performances ofthe Bearings Figure 8 depicts the variation of the staticcharacteristics for each journal bearing in respect to
Mathematical Problems in Engineering 11
5000 10000 15000 20000 25000 30000
00
02
04
06
08
10
12
14
16
Rotary speed (rpm)
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus02
minus04
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus04
minus08
minus12
minus16
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
minus04
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Rotary speed (rpm)
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
minus04
minus08
minus12
minus16
minus20
times104
(d) The damping of moment to displacement versus rotary speed
Figure 10 The effect of rotary speed on the damping coefficients
the rotary speed In the case of a water-lubricated hydrostaticbearing operating with eccentricity ratio and tilting anglesequal to zero it may be observed that the static characteristicsof the front bearing are the same as those of the rearbearing As shown in Figure 8(a) the quality of each bearingapparently remains unchanged with increased rotary speedAs shown in Figures 8(b) and 8(c) the gross power loss foreach bearing increases dramatically from 123W to 1232Wwhen the rotary speed increases from 5000 rpm to 30000 rpmbecause the frictional power loss is closely related to therotary speed according to (12) Furthermore the temperature
rise undergoes a sharp increase from07∘C to 8∘C It should bepointed out that most of the predicted temperature rises arehigher than the actual values presumably due to the adiabaticassumption imposed on the analysis Considering the valuesof the temperature rise the adiabatic flow assumption is fullyjustified for the bearing studied However when the rotaryspeed continues to increase the energy equation should beincluded to predict the temperature rise precisely
35 Effects of Rotary Speed on the Dynamic Characteristics ofthe Bearings Figures 9 and 10 show the dynamic coefficients
12 Mathematical Problems in Engineering
00 01 02 03 04 05220
225
230
235
240G
ross
qua
lity
(Lm
in)
Eccentricity ratio
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
00 01 02 03 04 05240
241
242
243
244
245
246
247
248
249
250
Gro
ss p
ower
loss
(W)
Eccentricity ratio
(b) The effect of rotary speed on the power loss
00 01 02 03 04 05148
150
152
154
156
158
160
Eccentricity ratio
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 11 The effect of eccentricity ratio on the static performance of the water-lubricated bearing
of each water-lubricated bearing in respect to the rotaryspeedThe eccentricity ratio and tilting angles are assumed aszero to exclude their influences on the film thickness Accord-ing to the results a higher rotary speed generates largercoupled stiffness of force to displacement and moment toangle but the influence of rotary speed on the relative directcoefficients is smallThe direct stiffness coefficients of force toangle and moment to displacement are relatively insensitiveto the variation of the rotary speed The magnitudes of thecross-coupled stiffness of force to displacement and momentto angle are comparable to those of the direct stiffnesswhich demonstrates the importance of hydrodynamic effectsUnlike the stiffness the damping coefficients are independentof the rotary speed in the aligned condition The reasonfor this is that the perturbed pressure due to the perturbedvelocity is not related to the rotary speed of the rotor
36 Effects of Eccentricity Ratio on the Static Performances ofthe Bearings The influence of eccentricity ratio in alignedcondition on static performances of each bearing is as shownin Figure 11 The tilting ratio is assumed as zero to excludethe influence of tilting effect Figure 11(a) indicates that thevalue of quality for each bearing decreases slowly with theeccentricity ratio As is shown in Figure 11(b) the powerloss is almost constant at first and then increases withincreased eccentricity ratio The maximum temperature riseacross the bearing length is about 16∘C at the eccentricityratio equal to 05 This is expected since a smaller clearanceproduces a larger frictional power loss and a smaller flowrate However it should be pointed out that in the alignedcondition the static characteristics of the hydrostatic water-lubricated journal bearings vary slightly with eccentricityratio
Mathematical Problems in Engineering 13
00 01 02 03 04 05
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Eccentricity ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
times108
(a) The stiffness of force to displacement versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Eccentricity ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
times106
minus1
minus2
(c) The stiffness of moment to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
times107
minus1
minus2
minus3
minus4
(d) The stiffness of moment to displacement versus eccentricityratio
Figure 12 The effect of eccentricity ratio on the stiffness coefficients
37 Effects of Eccentricity Ratio on the Dynamic Characteristicsof the Bearings Figures 12 and 13 show a variation ofstiffness and damping coefficients of each bearing versusthe eccentricity ratio It may be noticed that the dynamiccoefficients are almost constant as the eccentricity ratioincreases from 0 to 01 The direct stiffness of force todisplacement and moment to angle decreases gradually withincreased eccentricity ratio Generally the coupled stiffnessvaries significantly with the eccentricity ratio The coupledcoefficients of force to angle and moment to displacement
for the front bearing have the same magnitude as thosefor the rear bearing but in the opposite direction Thedamping coefficients are also relatively insensitive to theeccentricity ratio when it is not larger than 01 However inlarger eccentric condition the damping coefficients vary witheccentricity ratio and the larger the eccentricity ratio is thegreater the coefficients change In summary for the smalleccentric condition (le01) the influence of eccentricity ratioon the full dynamic coefficients for the hydrostatic water-lubricated journal bearing operating in aligned condition can
14 Mathematical Problems in Engineering
00 01 02 03 04 05
00
04
08
12
16
20
Eccentricity ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus04
minus08
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus eccentricity ratio
00 01 02 03 04 05
00
05
10
15
20
Eccentricity ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus05
minus10
minus15
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Eccentricity ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
minus04
minus08
(c) The damping of moment to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Eccentricity ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
times104
minus04
minus08
minus12
minus16
minus20
(d) The damping of moment to displacement versus eccentricityratio
Figure 13 The effect of eccentricity ratio on the damping coefficients
be ignored however for a larger eccentric condition theinfluence should be fully discussed
4 Conclusion
This paper investigated the complete dynamic coefficientsfor two hydrostatic water-lubricated journal bearings usedto support a rigid rotor considering the translational andtilting motion The bulk turbulent flow model and FDMmethod is used to numerically predict the performance of the
bearingsThe results show that the proposedwater-lubricatedhydrostatic bearing has the potential to fulfill the target oflower power loss temperature rise and larger load capacityat high speed On the basis of the results presented thefollowing conclusions can be drawn
(1) For a small tilting ratio (lt04) the influence of tiltingratio on the static and dynamic characteristics of awater-lubricated hydrostatic journal bearing is rela-tively small however when the tilting ratio continues
Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
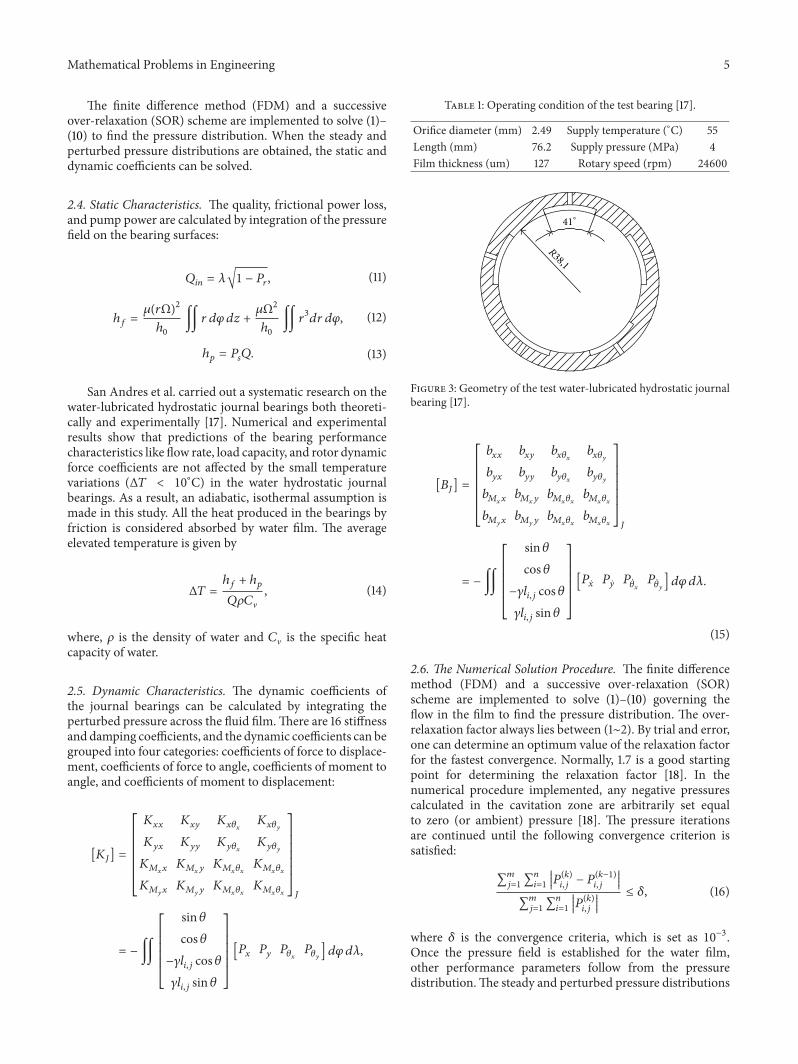
Mathematical Problems in Engineering 5
The finite difference method (FDM) and a successiveover-relaxation (SOR) scheme are implemented to solve (1)ndash(10) to find the pressure distribution When the steady andperturbed pressure distributions are obtained the static anddynamic coefficients can be solved
24 Static Characteristics The quality frictional power lossand pump power are calculated by integration of the pressurefield on the bearing surfaces
119876119894119899
= 120582radic1 minus 119875119903 (11)
ℎ119891=
120583(119903Ω)2
ℎ0
∬119903119889120593119889119911 +
120583Ω2
ℎ0
∬1199033
119889119903 119889120593 (12)
ℎ119901= 119875119904119876 (13)
San Andres et al carried out a systematic research on thewater-lubricated hydrostatic journal bearings both theoreti-cally and experimentally [17] Numerical and experimentalresults show that predictions of the bearing performancecharacteristics like flow rate load capacity and rotor dynamicforce coefficients are not affected by the small temperaturevariations (Δ119879 lt 10
∘C) in the water hydrostatic journalbearings As a result an adiabatic isothermal assumption ismade in this study All the heat produced in the bearings byfriction is considered absorbed by water film The averageelevated temperature is given by
Δ119879 =
ℎ119891+ ℎ119901
119876120588119862V (14)
where 120588 is the density of water and 119862V is the specific heatcapacity of water
25 Dynamic Characteristics The dynamic coefficients ofthe journal bearings can be calculated by integrating theperturbed pressure across the fluid filmThere are 16 stiffnessand damping coefficients and the dynamic coefficients can begrouped into four categories coefficients of force to displace-ment coefficients of force to angle coefficients of moment toangle and coefficients of moment to displacement
[119870119869] =
[
[
[
[
[
[
[
119870119909119909
119870119909119910
119870119909120579119909
119870119909120579119910
119870119910119909
119870119910119910
119870119910120579119909
119870119910120579119910
119870119872119909119909
119870119872119909119910
119870119872119909120579119909
119870119872119909120579119909
119870119872119910119909
119870119872119910119910
119870119872119909120579119909
119870119872119909120579119909
]
]
]
]
]
]
]119869
= minus∬
[
[
[
[
[
[
sin 120579
cos 120579minus120574119897119894119895cos 120579
120574119897119894119895sin 120579
]
]
]
]
]
]
[119875119909119875119910
119875120579119909
119875120579119910] 119889120593 119889120582
Table 1 Operating condition of the test bearing [17]
Orifice diameter (mm) 249 Supply temperature (∘C) 55Length (mm) 762 Supply pressure (MPa) 4Film thickness (um) 127 Rotary speed (rpm) 24600
41∘
R381
Figure 3 Geometry of the test water-lubricated hydrostatic journalbearing [17]
[119861119869] =
[
[
[
[
[
[
[
119887119909119909
119887119909119910
119887119909120579119909
119887119909120579119910
119887119910119909
119887119910119910
119887119910120579119909
119887119910120579119910
119887119872119909119909
119887119872119909119910
119887119872119909120579119909
119887119872119909120579119909
119887119872119910119909
119887119872119910119910
119887119872119909120579119909
119887119872119909120579119909
]
]
]
]
]
]
]119869
= minus∬
[
[
[
[
[
[
sin 120579
cos 120579minus120574119897119894119895cos 120579
120574119897119894119895sin 120579
]
]
]
]
]
]
[119875 119909119875119910119875 120579119909
119875 120579119910] 119889120593 119889120582
(15)
26 The Numerical Solution Procedure The finite differencemethod (FDM) and a successive over-relaxation (SOR)scheme are implemented to solve (1)ndash(10) governing theflow in the film to find the pressure distribution The over-relaxation factor always lies between (1sim2) By trial and errorone can determine an optimum value of the relaxation factorfor the fastest convergence Normally 17 is a good startingpoint for determining the relaxation factor [18] In thenumerical procedure implemented any negative pressurescalculated in the cavitation zone are arbitrarily set equalto zero (or ambient) pressure [18] The pressure iterationsare continued until the following convergence criterion issatisfied
sum119898
119895=1sum119899
119894=1
10038161003816100381610038161003816119875(119896)
119894119895minus 119875(119896minus1)
119894119895
10038161003816100381610038161003816
sum119898
119895=1sum119899
119894=1
10038161003816100381610038161003816119875(119896)
119894119895
10038161003816100381610038161003816
le 120575 (16)
where 120575 is the convergence criteria which is set as 10minus3
Once the pressure field is established for the water filmother performance parameters follow from the pressuredistributionThe steady and perturbed pressure distributions
6 Mathematical Problems in Engineering
00 01 02 03 04 05
0
1000
2000
3000
4000
5000
6000
7000
8000Lo
ad ca
paci
ty (N
)
Eccentricity ratio
Experimental resultsNumerical predictions
minus1000
(a) Comparison of load capacity
00 01 02 03 04 0500
04
08
12
16
20
Mas
s flow
rate
(kg
s)
Eccentricity ratio
Experimental resultsNumerical predictions
(b) Comparison of mass flow rate
Figure 4 Comparison of static performance of experimental results[17] and numerical predictions in respect to eccentricity ratio
obtained are subsequently integrated to yield the desiredstatic and dynamic coefficients
The fluid film was discretized by rectangular grid withunequal intervals which are 0033 0088 and 01154 forthe film land recess and return groove respectively in thecircumferential direction and 002 and 004 for the film landand recess area in the axial direction The total number ofthe grid is 31 times 102 It takes about 35 seconds for the staticperformance to achieve convergence A few validation testsweremade with a coarser grid of 31 times 86 and finer grid of 37 times
158 with different intervals and in no case did the predictedresults of the static characteristics differ by more than 01percent from those obtained by the initial grid
3 Results and Discussion
31 Comparisons of Present Solution with ExperimentalResults The present numerical solution has been correlated
Front bearingRear bearing
00 01 02 03 04 05 06 07 08 09 10218
220
222
224
226
228
230
232
234
236
Qua
lity
(Lm
in)
Tilting ratiominus01
(a) The effect of tilting angle on the quality
Front bearingRear bearing
00 01 02 03 04 05 06 07 08 09 10240242244246248250252254256258260262264
Gro
ss p
ower
loss
(W)
Tilting ratiominus01
(b) The effect of tilting angle on the power loss
00 01 02 03 04 05 06 07 08 09 10148
152
156
160
164
168
172
Tilting ratio
Tem
pera
ture
rise
(∘C)
minus01
Front bearingRear bearing
(c) The effect of tilting angle on the temperature rise
Figure 5 The effect of tilting angle on the static performance of thewater-lubricated bearing
Mathematical Problems in Engineering 7
00 01 02 03 04 05 06 07 08
00
05
10
15
20
25
30
35
Stiff
ness
of f
orce
to d
ispla
cem
ent (
Nm
)
Tilting ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
Eccentricity ratio = 0
minus05
minus10
minus15
minus01
times108
(a) The stiffness of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Tilting ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus tilting ratio
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
00 01 02 03 04 05 06 07 08
00
05
10
15
20
25
30
35
40
Tilting ratio
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
Eccentricity ratio = 0times10
6
minus05
minus10
minus15
minus01
(c) The stiffness of moment to angle versus tilting ratio
Tilting ratio00 01 02 03 04 05 06 07 08
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
Eccentricity ratio = 0times10
7
minus1
minus2
minus3
minus4
minus01
(d) The stiffness of moment to displacement versus tilting ratio
Figure 6 The effect of tilting ratio on the stiffness
and validated with the experimental results available inthe literature A five-recess turbulent-flow water-lubricatedhydrostatic bearing operating at a high rotational speed istested by San Andres et al [17] Table 1 shows the bearingdescription and operating conditions and Figure 3 shows theschematic of the bearing Figure 4 shows a comparison ofmeasured load capacity and flow rate and the numerical pre-dictions in respect to eccentricity ratio As shown in Figure 4a good agreement is observed between the present numericalpredictions and the experimental results available in the
reference The calculated load capacity results correlate wellwith the experimental results with a maximum differenceof 115 The average of the flow rate for the experimentalresults is about 12 kgs while that for the numerical resultsis approximately 145 kgs
32 Effects of Tilting Ratio on the Static Performances of theBearings The geometric parameters for the bearings havebeen presented in Figure 1 the supply pressure is 15MPa the
8 Mathematical Problems in Engineering
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
Tilting ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
Eccentricity ratio = 0
minus04
minus01
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
000408121620242832
Tilting ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus12
minus16
minus20
minus24
minus28
minus32
minus01
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
32
Tilting ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus01
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Tilting ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
times104
(d) The damping of moment to displacement versus tilting ratio
Figure 7 The effect of tilting ratio on the damping coefficients
orifice diameter is 06mm the pressurized water is suppliedat a temperature of 30∘C and the viscosity is 000087 Pa sdot s
Figure 1 shows the coordinate system for the tiltingmotion of the rotor As the film variation of each bearingvaries with different values for the tilting angles and bearingspan the tilting ratio is proposed here to investigate the effectof misalignment The tilting ratio is defined as follows
120581 =
119897119898radic1205792
119909+ 1205792
119910
119888
(17)
where 119897119898is the distance between the titling center and the left
edge of the front bearing or the right edge of the rear bearingwhich is shown in Figure 1
In order to obtain a better physical insight into theeffect of misalignment the static characteristics have beenpresented with eccentricity ratio equal to zero Figures 5(a)ndash5(c) show the calculated quality power loss and temperaturerise for different values of tilting ratios for each journalbearing operating at 10000 rpm It is observed that the qualityof each bearing undergoes a reduction by only 63 when
Mathematical Problems in Engineering 9
5000 10000 15000 20000 25000 3000020
21
22
23
24
25G
ross
qua
lity
(Lm
in)
Rotary speed (rpm)
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
5000 10000 15000 20000 25000 300000
200
400
600
800
1000
1200
1400
Rotary speed (rpm)
Gro
ss p
ower
loss
(W)
(b) The effect of rotary speed on the power loss
5000 10000 15000 20000 25000 300000
1
2
3
4
5
6
7
8
9
10
Rotary speed (rpm)
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 8 The effect of rotary speed on the static performance of the water-lubricated bearing
the tilting ratio increases from zero to 075 The total powerloss of each bearing keeps almost unchanged when the tiltingratio is not greater than 04 However when the tiltingratio continues to increase the power loss gets a slightincrease by approximately 5 Meanwhile the temperaturerise increases with increased tilting ratio The reason for thisis that increasing tilting angles will increase the film variationof each bearing which promote the hydrodynamic andturbulent effect It is noticed that the maximum temperaturerise for the investigated water-lubricated bearing is 17∘C forthe rotor-bearing system investigated here which is far lowerthan the conventional oil film bearings This in turn verifiesthe validation of the adiabatic assumption In conclusionwhen the tilting ratio is smaller than 04 the influence oftilting ratio on the static performance of a water-lubricatedhydrostatic journal bearing can be ignored
33 Effects of Tilting Ratio on the Dynamic Characteristicsof the Bearings Figures 6 and 7 show the variation of thedynamic coefficients of the two identical bearings in respectto the tilting ratio with a rotary speed of 10000 rpm Theeccentricity ratio is assumed to be zero to exclude the effectof the clearance change due to the eccentricity ratioThe solidlines represent the dynamic coefficients of the front journalbearing while the dotted lines represent those of the rearbearing
According to the results the dynamic coefficients of forceto displacement andmoment to angle for the front bearing areapproximately equal to those for the rear bearing due to thefact that the tilting center almost coincides with the bearingspan center However the coupled dynamic coefficients offorce to angle and moment to displacement for the twobearings have close proximitymagnitudes but in the opposite
10 Mathematical Problems in Engineering
5000 10000 15000 20000 25000 30000
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Rotary speed (rpm)
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
minus3
minus4
times108
(a) The stiffness of force to displacement versys rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Rotary speed (rpm)
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(b) The stiffness of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times106
(c) The stiffness of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(d) The stiffness ofmoment to displacement versus rotary speed
Figure 9 The effect of rotary speed on the stiffness coefficients
direction due to the fact that the two bearings are arranged atboth sides of the mass center which is the origin of the tiltingmotions It is observed that with the increase of the tiltingratio the stiffness and damping coefficients of the bearingskeep almost independent of the tilting ratio when it is notlarger than 04 however when the tilting ratio continuesto increase the effect on dynamic coefficients is significantwith a maximum variation rate of 167 for the stiffnessand 492 for the damping coefficients Furthermore thelarger the tilting ratio is the greater the differences amongthe coefficients are This can be ascribed to the variations
of the film thickness induced by the tilting angles andbearing span which can be calculated according to (5) Theresults indicate that for a small tilting ratio the effect ofthe misalignment on the performance of hydrostatic water-lubricated journal bearings can be ignored but for a relativelygreater tilting ratio the effect of misalignment should betaken into consideration
34 Effects of Rotary Speed on the Static Performances ofthe Bearings Figure 8 depicts the variation of the staticcharacteristics for each journal bearing in respect to
Mathematical Problems in Engineering 11
5000 10000 15000 20000 25000 30000
00
02
04
06
08
10
12
14
16
Rotary speed (rpm)
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus02
minus04
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus04
minus08
minus12
minus16
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
minus04
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Rotary speed (rpm)
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
minus04
minus08
minus12
minus16
minus20
times104
(d) The damping of moment to displacement versus rotary speed
Figure 10 The effect of rotary speed on the damping coefficients
the rotary speed In the case of a water-lubricated hydrostaticbearing operating with eccentricity ratio and tilting anglesequal to zero it may be observed that the static characteristicsof the front bearing are the same as those of the rearbearing As shown in Figure 8(a) the quality of each bearingapparently remains unchanged with increased rotary speedAs shown in Figures 8(b) and 8(c) the gross power loss foreach bearing increases dramatically from 123W to 1232Wwhen the rotary speed increases from 5000 rpm to 30000 rpmbecause the frictional power loss is closely related to therotary speed according to (12) Furthermore the temperature
rise undergoes a sharp increase from07∘C to 8∘C It should bepointed out that most of the predicted temperature rises arehigher than the actual values presumably due to the adiabaticassumption imposed on the analysis Considering the valuesof the temperature rise the adiabatic flow assumption is fullyjustified for the bearing studied However when the rotaryspeed continues to increase the energy equation should beincluded to predict the temperature rise precisely
35 Effects of Rotary Speed on the Dynamic Characteristics ofthe Bearings Figures 9 and 10 show the dynamic coefficients
12 Mathematical Problems in Engineering
00 01 02 03 04 05220
225
230
235
240G
ross
qua
lity
(Lm
in)
Eccentricity ratio
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
00 01 02 03 04 05240
241
242
243
244
245
246
247
248
249
250
Gro
ss p
ower
loss
(W)
Eccentricity ratio
(b) The effect of rotary speed on the power loss
00 01 02 03 04 05148
150
152
154
156
158
160
Eccentricity ratio
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 11 The effect of eccentricity ratio on the static performance of the water-lubricated bearing
of each water-lubricated bearing in respect to the rotaryspeedThe eccentricity ratio and tilting angles are assumed aszero to exclude their influences on the film thickness Accord-ing to the results a higher rotary speed generates largercoupled stiffness of force to displacement and moment toangle but the influence of rotary speed on the relative directcoefficients is smallThe direct stiffness coefficients of force toangle and moment to displacement are relatively insensitiveto the variation of the rotary speed The magnitudes of thecross-coupled stiffness of force to displacement and momentto angle are comparable to those of the direct stiffnesswhich demonstrates the importance of hydrodynamic effectsUnlike the stiffness the damping coefficients are independentof the rotary speed in the aligned condition The reasonfor this is that the perturbed pressure due to the perturbedvelocity is not related to the rotary speed of the rotor
36 Effects of Eccentricity Ratio on the Static Performances ofthe Bearings The influence of eccentricity ratio in alignedcondition on static performances of each bearing is as shownin Figure 11 The tilting ratio is assumed as zero to excludethe influence of tilting effect Figure 11(a) indicates that thevalue of quality for each bearing decreases slowly with theeccentricity ratio As is shown in Figure 11(b) the powerloss is almost constant at first and then increases withincreased eccentricity ratio The maximum temperature riseacross the bearing length is about 16∘C at the eccentricityratio equal to 05 This is expected since a smaller clearanceproduces a larger frictional power loss and a smaller flowrate However it should be pointed out that in the alignedcondition the static characteristics of the hydrostatic water-lubricated journal bearings vary slightly with eccentricityratio
Mathematical Problems in Engineering 13
00 01 02 03 04 05
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Eccentricity ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
times108
(a) The stiffness of force to displacement versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Eccentricity ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
times106
minus1
minus2
(c) The stiffness of moment to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
times107
minus1
minus2
minus3
minus4
(d) The stiffness of moment to displacement versus eccentricityratio
Figure 12 The effect of eccentricity ratio on the stiffness coefficients
37 Effects of Eccentricity Ratio on the Dynamic Characteristicsof the Bearings Figures 12 and 13 show a variation ofstiffness and damping coefficients of each bearing versusthe eccentricity ratio It may be noticed that the dynamiccoefficients are almost constant as the eccentricity ratioincreases from 0 to 01 The direct stiffness of force todisplacement and moment to angle decreases gradually withincreased eccentricity ratio Generally the coupled stiffnessvaries significantly with the eccentricity ratio The coupledcoefficients of force to angle and moment to displacement
for the front bearing have the same magnitude as thosefor the rear bearing but in the opposite direction Thedamping coefficients are also relatively insensitive to theeccentricity ratio when it is not larger than 01 However inlarger eccentric condition the damping coefficients vary witheccentricity ratio and the larger the eccentricity ratio is thegreater the coefficients change In summary for the smalleccentric condition (le01) the influence of eccentricity ratioon the full dynamic coefficients for the hydrostatic water-lubricated journal bearing operating in aligned condition can
14 Mathematical Problems in Engineering
00 01 02 03 04 05
00
04
08
12
16
20
Eccentricity ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus04
minus08
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus eccentricity ratio
00 01 02 03 04 05
00
05
10
15
20
Eccentricity ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus05
minus10
minus15
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Eccentricity ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
minus04
minus08
(c) The damping of moment to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Eccentricity ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
times104
minus04
minus08
minus12
minus16
minus20
(d) The damping of moment to displacement versus eccentricityratio
Figure 13 The effect of eccentricity ratio on the damping coefficients
be ignored however for a larger eccentric condition theinfluence should be fully discussed
4 Conclusion
This paper investigated the complete dynamic coefficientsfor two hydrostatic water-lubricated journal bearings usedto support a rigid rotor considering the translational andtilting motion The bulk turbulent flow model and FDMmethod is used to numerically predict the performance of the
bearingsThe results show that the proposedwater-lubricatedhydrostatic bearing has the potential to fulfill the target oflower power loss temperature rise and larger load capacityat high speed On the basis of the results presented thefollowing conclusions can be drawn
(1) For a small tilting ratio (lt04) the influence of tiltingratio on the static and dynamic characteristics of awater-lubricated hydrostatic journal bearing is rela-tively small however when the tilting ratio continues
Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
00 01 02 03 04 05
0
1000
2000
3000
4000
5000
6000
7000
8000Lo
ad ca
paci
ty (N
)
Eccentricity ratio
Experimental resultsNumerical predictions
minus1000
(a) Comparison of load capacity
00 01 02 03 04 0500
04
08
12
16
20
Mas
s flow
rate
(kg
s)
Eccentricity ratio
Experimental resultsNumerical predictions
(b) Comparison of mass flow rate
Figure 4 Comparison of static performance of experimental results[17] and numerical predictions in respect to eccentricity ratio
obtained are subsequently integrated to yield the desiredstatic and dynamic coefficients
The fluid film was discretized by rectangular grid withunequal intervals which are 0033 0088 and 01154 forthe film land recess and return groove respectively in thecircumferential direction and 002 and 004 for the film landand recess area in the axial direction The total number ofthe grid is 31 times 102 It takes about 35 seconds for the staticperformance to achieve convergence A few validation testsweremade with a coarser grid of 31 times 86 and finer grid of 37 times
158 with different intervals and in no case did the predictedresults of the static characteristics differ by more than 01percent from those obtained by the initial grid
3 Results and Discussion
31 Comparisons of Present Solution with ExperimentalResults The present numerical solution has been correlated
Front bearingRear bearing
00 01 02 03 04 05 06 07 08 09 10218
220
222
224
226
228
230
232
234
236
Qua
lity
(Lm
in)
Tilting ratiominus01
(a) The effect of tilting angle on the quality
Front bearingRear bearing
00 01 02 03 04 05 06 07 08 09 10240242244246248250252254256258260262264
Gro
ss p
ower
loss
(W)
Tilting ratiominus01
(b) The effect of tilting angle on the power loss
00 01 02 03 04 05 06 07 08 09 10148
152
156
160
164
168
172
Tilting ratio
Tem
pera
ture
rise
(∘C)
minus01
Front bearingRear bearing
(c) The effect of tilting angle on the temperature rise
Figure 5 The effect of tilting angle on the static performance of thewater-lubricated bearing
Mathematical Problems in Engineering 7
00 01 02 03 04 05 06 07 08
00
05
10
15
20
25
30
35
Stiff
ness
of f
orce
to d
ispla
cem
ent (
Nm
)
Tilting ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
Eccentricity ratio = 0
minus05
minus10
minus15
minus01
times108
(a) The stiffness of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Tilting ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus tilting ratio
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
00 01 02 03 04 05 06 07 08
00
05
10
15
20
25
30
35
40
Tilting ratio
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
Eccentricity ratio = 0times10
6
minus05
minus10
minus15
minus01
(c) The stiffness of moment to angle versus tilting ratio
Tilting ratio00 01 02 03 04 05 06 07 08
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
Eccentricity ratio = 0times10
7
minus1
minus2
minus3
minus4
minus01
(d) The stiffness of moment to displacement versus tilting ratio
Figure 6 The effect of tilting ratio on the stiffness
and validated with the experimental results available inthe literature A five-recess turbulent-flow water-lubricatedhydrostatic bearing operating at a high rotational speed istested by San Andres et al [17] Table 1 shows the bearingdescription and operating conditions and Figure 3 shows theschematic of the bearing Figure 4 shows a comparison ofmeasured load capacity and flow rate and the numerical pre-dictions in respect to eccentricity ratio As shown in Figure 4a good agreement is observed between the present numericalpredictions and the experimental results available in the
reference The calculated load capacity results correlate wellwith the experimental results with a maximum differenceof 115 The average of the flow rate for the experimentalresults is about 12 kgs while that for the numerical resultsis approximately 145 kgs
32 Effects of Tilting Ratio on the Static Performances of theBearings The geometric parameters for the bearings havebeen presented in Figure 1 the supply pressure is 15MPa the
8 Mathematical Problems in Engineering
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
Tilting ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
Eccentricity ratio = 0
minus04
minus01
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
000408121620242832
Tilting ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus12
minus16
minus20
minus24
minus28
minus32
minus01
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
32
Tilting ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus01
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Tilting ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
times104
(d) The damping of moment to displacement versus tilting ratio
Figure 7 The effect of tilting ratio on the damping coefficients
orifice diameter is 06mm the pressurized water is suppliedat a temperature of 30∘C and the viscosity is 000087 Pa sdot s
Figure 1 shows the coordinate system for the tiltingmotion of the rotor As the film variation of each bearingvaries with different values for the tilting angles and bearingspan the tilting ratio is proposed here to investigate the effectof misalignment The tilting ratio is defined as follows
120581 =
119897119898radic1205792
119909+ 1205792
119910
119888
(17)
where 119897119898is the distance between the titling center and the left
edge of the front bearing or the right edge of the rear bearingwhich is shown in Figure 1
In order to obtain a better physical insight into theeffect of misalignment the static characteristics have beenpresented with eccentricity ratio equal to zero Figures 5(a)ndash5(c) show the calculated quality power loss and temperaturerise for different values of tilting ratios for each journalbearing operating at 10000 rpm It is observed that the qualityof each bearing undergoes a reduction by only 63 when
Mathematical Problems in Engineering 9
5000 10000 15000 20000 25000 3000020
21
22
23
24
25G
ross
qua
lity
(Lm
in)
Rotary speed (rpm)
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
5000 10000 15000 20000 25000 300000
200
400
600
800
1000
1200
1400
Rotary speed (rpm)
Gro
ss p
ower
loss
(W)
(b) The effect of rotary speed on the power loss
5000 10000 15000 20000 25000 300000
1
2
3
4
5
6
7
8
9
10
Rotary speed (rpm)
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 8 The effect of rotary speed on the static performance of the water-lubricated bearing
the tilting ratio increases from zero to 075 The total powerloss of each bearing keeps almost unchanged when the tiltingratio is not greater than 04 However when the tiltingratio continues to increase the power loss gets a slightincrease by approximately 5 Meanwhile the temperaturerise increases with increased tilting ratio The reason for thisis that increasing tilting angles will increase the film variationof each bearing which promote the hydrodynamic andturbulent effect It is noticed that the maximum temperaturerise for the investigated water-lubricated bearing is 17∘C forthe rotor-bearing system investigated here which is far lowerthan the conventional oil film bearings This in turn verifiesthe validation of the adiabatic assumption In conclusionwhen the tilting ratio is smaller than 04 the influence oftilting ratio on the static performance of a water-lubricatedhydrostatic journal bearing can be ignored
33 Effects of Tilting Ratio on the Dynamic Characteristicsof the Bearings Figures 6 and 7 show the variation of thedynamic coefficients of the two identical bearings in respectto the tilting ratio with a rotary speed of 10000 rpm Theeccentricity ratio is assumed to be zero to exclude the effectof the clearance change due to the eccentricity ratioThe solidlines represent the dynamic coefficients of the front journalbearing while the dotted lines represent those of the rearbearing
According to the results the dynamic coefficients of forceto displacement andmoment to angle for the front bearing areapproximately equal to those for the rear bearing due to thefact that the tilting center almost coincides with the bearingspan center However the coupled dynamic coefficients offorce to angle and moment to displacement for the twobearings have close proximitymagnitudes but in the opposite
10 Mathematical Problems in Engineering
5000 10000 15000 20000 25000 30000
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Rotary speed (rpm)
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
minus3
minus4
times108
(a) The stiffness of force to displacement versys rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Rotary speed (rpm)
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(b) The stiffness of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times106
(c) The stiffness of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(d) The stiffness ofmoment to displacement versus rotary speed
Figure 9 The effect of rotary speed on the stiffness coefficients
direction due to the fact that the two bearings are arranged atboth sides of the mass center which is the origin of the tiltingmotions It is observed that with the increase of the tiltingratio the stiffness and damping coefficients of the bearingskeep almost independent of the tilting ratio when it is notlarger than 04 however when the tilting ratio continuesto increase the effect on dynamic coefficients is significantwith a maximum variation rate of 167 for the stiffnessand 492 for the damping coefficients Furthermore thelarger the tilting ratio is the greater the differences amongthe coefficients are This can be ascribed to the variations
of the film thickness induced by the tilting angles andbearing span which can be calculated according to (5) Theresults indicate that for a small tilting ratio the effect ofthe misalignment on the performance of hydrostatic water-lubricated journal bearings can be ignored but for a relativelygreater tilting ratio the effect of misalignment should betaken into consideration
34 Effects of Rotary Speed on the Static Performances ofthe Bearings Figure 8 depicts the variation of the staticcharacteristics for each journal bearing in respect to
Mathematical Problems in Engineering 11
5000 10000 15000 20000 25000 30000
00
02
04
06
08
10
12
14
16
Rotary speed (rpm)
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus02
minus04
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus04
minus08
minus12
minus16
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
minus04
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Rotary speed (rpm)
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
minus04
minus08
minus12
minus16
minus20
times104
(d) The damping of moment to displacement versus rotary speed
Figure 10 The effect of rotary speed on the damping coefficients
the rotary speed In the case of a water-lubricated hydrostaticbearing operating with eccentricity ratio and tilting anglesequal to zero it may be observed that the static characteristicsof the front bearing are the same as those of the rearbearing As shown in Figure 8(a) the quality of each bearingapparently remains unchanged with increased rotary speedAs shown in Figures 8(b) and 8(c) the gross power loss foreach bearing increases dramatically from 123W to 1232Wwhen the rotary speed increases from 5000 rpm to 30000 rpmbecause the frictional power loss is closely related to therotary speed according to (12) Furthermore the temperature
rise undergoes a sharp increase from07∘C to 8∘C It should bepointed out that most of the predicted temperature rises arehigher than the actual values presumably due to the adiabaticassumption imposed on the analysis Considering the valuesof the temperature rise the adiabatic flow assumption is fullyjustified for the bearing studied However when the rotaryspeed continues to increase the energy equation should beincluded to predict the temperature rise precisely
35 Effects of Rotary Speed on the Dynamic Characteristics ofthe Bearings Figures 9 and 10 show the dynamic coefficients
12 Mathematical Problems in Engineering
00 01 02 03 04 05220
225
230
235
240G
ross
qua
lity
(Lm
in)
Eccentricity ratio
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
00 01 02 03 04 05240
241
242
243
244
245
246
247
248
249
250
Gro
ss p
ower
loss
(W)
Eccentricity ratio
(b) The effect of rotary speed on the power loss
00 01 02 03 04 05148
150
152
154
156
158
160
Eccentricity ratio
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 11 The effect of eccentricity ratio on the static performance of the water-lubricated bearing
of each water-lubricated bearing in respect to the rotaryspeedThe eccentricity ratio and tilting angles are assumed aszero to exclude their influences on the film thickness Accord-ing to the results a higher rotary speed generates largercoupled stiffness of force to displacement and moment toangle but the influence of rotary speed on the relative directcoefficients is smallThe direct stiffness coefficients of force toangle and moment to displacement are relatively insensitiveto the variation of the rotary speed The magnitudes of thecross-coupled stiffness of force to displacement and momentto angle are comparable to those of the direct stiffnesswhich demonstrates the importance of hydrodynamic effectsUnlike the stiffness the damping coefficients are independentof the rotary speed in the aligned condition The reasonfor this is that the perturbed pressure due to the perturbedvelocity is not related to the rotary speed of the rotor
36 Effects of Eccentricity Ratio on the Static Performances ofthe Bearings The influence of eccentricity ratio in alignedcondition on static performances of each bearing is as shownin Figure 11 The tilting ratio is assumed as zero to excludethe influence of tilting effect Figure 11(a) indicates that thevalue of quality for each bearing decreases slowly with theeccentricity ratio As is shown in Figure 11(b) the powerloss is almost constant at first and then increases withincreased eccentricity ratio The maximum temperature riseacross the bearing length is about 16∘C at the eccentricityratio equal to 05 This is expected since a smaller clearanceproduces a larger frictional power loss and a smaller flowrate However it should be pointed out that in the alignedcondition the static characteristics of the hydrostatic water-lubricated journal bearings vary slightly with eccentricityratio
Mathematical Problems in Engineering 13
00 01 02 03 04 05
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Eccentricity ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
times108
(a) The stiffness of force to displacement versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Eccentricity ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
times106
minus1
minus2
(c) The stiffness of moment to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
times107
minus1
minus2
minus3
minus4
(d) The stiffness of moment to displacement versus eccentricityratio
Figure 12 The effect of eccentricity ratio on the stiffness coefficients
37 Effects of Eccentricity Ratio on the Dynamic Characteristicsof the Bearings Figures 12 and 13 show a variation ofstiffness and damping coefficients of each bearing versusthe eccentricity ratio It may be noticed that the dynamiccoefficients are almost constant as the eccentricity ratioincreases from 0 to 01 The direct stiffness of force todisplacement and moment to angle decreases gradually withincreased eccentricity ratio Generally the coupled stiffnessvaries significantly with the eccentricity ratio The coupledcoefficients of force to angle and moment to displacement
for the front bearing have the same magnitude as thosefor the rear bearing but in the opposite direction Thedamping coefficients are also relatively insensitive to theeccentricity ratio when it is not larger than 01 However inlarger eccentric condition the damping coefficients vary witheccentricity ratio and the larger the eccentricity ratio is thegreater the coefficients change In summary for the smalleccentric condition (le01) the influence of eccentricity ratioon the full dynamic coefficients for the hydrostatic water-lubricated journal bearing operating in aligned condition can
14 Mathematical Problems in Engineering
00 01 02 03 04 05
00
04
08
12
16
20
Eccentricity ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus04
minus08
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus eccentricity ratio
00 01 02 03 04 05
00
05
10
15
20
Eccentricity ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus05
minus10
minus15
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Eccentricity ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
minus04
minus08
(c) The damping of moment to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Eccentricity ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
times104
minus04
minus08
minus12
minus16
minus20
(d) The damping of moment to displacement versus eccentricityratio
Figure 13 The effect of eccentricity ratio on the damping coefficients
be ignored however for a larger eccentric condition theinfluence should be fully discussed
4 Conclusion
This paper investigated the complete dynamic coefficientsfor two hydrostatic water-lubricated journal bearings usedto support a rigid rotor considering the translational andtilting motion The bulk turbulent flow model and FDMmethod is used to numerically predict the performance of the
bearingsThe results show that the proposedwater-lubricatedhydrostatic bearing has the potential to fulfill the target oflower power loss temperature rise and larger load capacityat high speed On the basis of the results presented thefollowing conclusions can be drawn
(1) For a small tilting ratio (lt04) the influence of tiltingratio on the static and dynamic characteristics of awater-lubricated hydrostatic journal bearing is rela-tively small however when the tilting ratio continues
Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
00 01 02 03 04 05 06 07 08
00
05
10
15
20
25
30
35
Stiff
ness
of f
orce
to d
ispla
cem
ent (
Nm
)
Tilting ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
Eccentricity ratio = 0
minus05
minus10
minus15
minus01
times108
(a) The stiffness of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Tilting ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus tilting ratio
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
00 01 02 03 04 05 06 07 08
00
05
10
15
20
25
30
35
40
Tilting ratio
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
Eccentricity ratio = 0times10
6
minus05
minus10
minus15
minus01
(c) The stiffness of moment to angle versus tilting ratio
Tilting ratio00 01 02 03 04 05 06 07 08
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
Eccentricity ratio = 0times10
7
minus1
minus2
minus3
minus4
minus01
(d) The stiffness of moment to displacement versus tilting ratio
Figure 6 The effect of tilting ratio on the stiffness
and validated with the experimental results available inthe literature A five-recess turbulent-flow water-lubricatedhydrostatic bearing operating at a high rotational speed istested by San Andres et al [17] Table 1 shows the bearingdescription and operating conditions and Figure 3 shows theschematic of the bearing Figure 4 shows a comparison ofmeasured load capacity and flow rate and the numerical pre-dictions in respect to eccentricity ratio As shown in Figure 4a good agreement is observed between the present numericalpredictions and the experimental results available in the
reference The calculated load capacity results correlate wellwith the experimental results with a maximum differenceof 115 The average of the flow rate for the experimentalresults is about 12 kgs while that for the numerical resultsis approximately 145 kgs
32 Effects of Tilting Ratio on the Static Performances of theBearings The geometric parameters for the bearings havebeen presented in Figure 1 the supply pressure is 15MPa the
8 Mathematical Problems in Engineering
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
Tilting ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
Eccentricity ratio = 0
minus04
minus01
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
000408121620242832
Tilting ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus12
minus16
minus20
minus24
minus28
minus32
minus01
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
32
Tilting ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus01
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Tilting ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
times104
(d) The damping of moment to displacement versus tilting ratio
Figure 7 The effect of tilting ratio on the damping coefficients
orifice diameter is 06mm the pressurized water is suppliedat a temperature of 30∘C and the viscosity is 000087 Pa sdot s
Figure 1 shows the coordinate system for the tiltingmotion of the rotor As the film variation of each bearingvaries with different values for the tilting angles and bearingspan the tilting ratio is proposed here to investigate the effectof misalignment The tilting ratio is defined as follows
120581 =
119897119898radic1205792
119909+ 1205792
119910
119888
(17)
where 119897119898is the distance between the titling center and the left
edge of the front bearing or the right edge of the rear bearingwhich is shown in Figure 1
In order to obtain a better physical insight into theeffect of misalignment the static characteristics have beenpresented with eccentricity ratio equal to zero Figures 5(a)ndash5(c) show the calculated quality power loss and temperaturerise for different values of tilting ratios for each journalbearing operating at 10000 rpm It is observed that the qualityof each bearing undergoes a reduction by only 63 when
Mathematical Problems in Engineering 9
5000 10000 15000 20000 25000 3000020
21
22
23
24
25G
ross
qua
lity
(Lm
in)
Rotary speed (rpm)
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
5000 10000 15000 20000 25000 300000
200
400
600
800
1000
1200
1400
Rotary speed (rpm)
Gro
ss p
ower
loss
(W)
(b) The effect of rotary speed on the power loss
5000 10000 15000 20000 25000 300000
1
2
3
4
5
6
7
8
9
10
Rotary speed (rpm)
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 8 The effect of rotary speed on the static performance of the water-lubricated bearing
the tilting ratio increases from zero to 075 The total powerloss of each bearing keeps almost unchanged when the tiltingratio is not greater than 04 However when the tiltingratio continues to increase the power loss gets a slightincrease by approximately 5 Meanwhile the temperaturerise increases with increased tilting ratio The reason for thisis that increasing tilting angles will increase the film variationof each bearing which promote the hydrodynamic andturbulent effect It is noticed that the maximum temperaturerise for the investigated water-lubricated bearing is 17∘C forthe rotor-bearing system investigated here which is far lowerthan the conventional oil film bearings This in turn verifiesthe validation of the adiabatic assumption In conclusionwhen the tilting ratio is smaller than 04 the influence oftilting ratio on the static performance of a water-lubricatedhydrostatic journal bearing can be ignored
33 Effects of Tilting Ratio on the Dynamic Characteristicsof the Bearings Figures 6 and 7 show the variation of thedynamic coefficients of the two identical bearings in respectto the tilting ratio with a rotary speed of 10000 rpm Theeccentricity ratio is assumed to be zero to exclude the effectof the clearance change due to the eccentricity ratioThe solidlines represent the dynamic coefficients of the front journalbearing while the dotted lines represent those of the rearbearing
According to the results the dynamic coefficients of forceto displacement andmoment to angle for the front bearing areapproximately equal to those for the rear bearing due to thefact that the tilting center almost coincides with the bearingspan center However the coupled dynamic coefficients offorce to angle and moment to displacement for the twobearings have close proximitymagnitudes but in the opposite
10 Mathematical Problems in Engineering
5000 10000 15000 20000 25000 30000
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Rotary speed (rpm)
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
minus3
minus4
times108
(a) The stiffness of force to displacement versys rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Rotary speed (rpm)
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(b) The stiffness of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times106
(c) The stiffness of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(d) The stiffness ofmoment to displacement versus rotary speed
Figure 9 The effect of rotary speed on the stiffness coefficients
direction due to the fact that the two bearings are arranged atboth sides of the mass center which is the origin of the tiltingmotions It is observed that with the increase of the tiltingratio the stiffness and damping coefficients of the bearingskeep almost independent of the tilting ratio when it is notlarger than 04 however when the tilting ratio continuesto increase the effect on dynamic coefficients is significantwith a maximum variation rate of 167 for the stiffnessand 492 for the damping coefficients Furthermore thelarger the tilting ratio is the greater the differences amongthe coefficients are This can be ascribed to the variations
of the film thickness induced by the tilting angles andbearing span which can be calculated according to (5) Theresults indicate that for a small tilting ratio the effect ofthe misalignment on the performance of hydrostatic water-lubricated journal bearings can be ignored but for a relativelygreater tilting ratio the effect of misalignment should betaken into consideration
34 Effects of Rotary Speed on the Static Performances ofthe Bearings Figure 8 depicts the variation of the staticcharacteristics for each journal bearing in respect to
Mathematical Problems in Engineering 11
5000 10000 15000 20000 25000 30000
00
02
04
06
08
10
12
14
16
Rotary speed (rpm)
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus02
minus04
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus04
minus08
minus12
minus16
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
minus04
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Rotary speed (rpm)
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
minus04
minus08
minus12
minus16
minus20
times104
(d) The damping of moment to displacement versus rotary speed
Figure 10 The effect of rotary speed on the damping coefficients
the rotary speed In the case of a water-lubricated hydrostaticbearing operating with eccentricity ratio and tilting anglesequal to zero it may be observed that the static characteristicsof the front bearing are the same as those of the rearbearing As shown in Figure 8(a) the quality of each bearingapparently remains unchanged with increased rotary speedAs shown in Figures 8(b) and 8(c) the gross power loss foreach bearing increases dramatically from 123W to 1232Wwhen the rotary speed increases from 5000 rpm to 30000 rpmbecause the frictional power loss is closely related to therotary speed according to (12) Furthermore the temperature
rise undergoes a sharp increase from07∘C to 8∘C It should bepointed out that most of the predicted temperature rises arehigher than the actual values presumably due to the adiabaticassumption imposed on the analysis Considering the valuesof the temperature rise the adiabatic flow assumption is fullyjustified for the bearing studied However when the rotaryspeed continues to increase the energy equation should beincluded to predict the temperature rise precisely
35 Effects of Rotary Speed on the Dynamic Characteristics ofthe Bearings Figures 9 and 10 show the dynamic coefficients
12 Mathematical Problems in Engineering
00 01 02 03 04 05220
225
230
235
240G
ross
qua
lity
(Lm
in)
Eccentricity ratio
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
00 01 02 03 04 05240
241
242
243
244
245
246
247
248
249
250
Gro
ss p
ower
loss
(W)
Eccentricity ratio
(b) The effect of rotary speed on the power loss
00 01 02 03 04 05148
150
152
154
156
158
160
Eccentricity ratio
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 11 The effect of eccentricity ratio on the static performance of the water-lubricated bearing
of each water-lubricated bearing in respect to the rotaryspeedThe eccentricity ratio and tilting angles are assumed aszero to exclude their influences on the film thickness Accord-ing to the results a higher rotary speed generates largercoupled stiffness of force to displacement and moment toangle but the influence of rotary speed on the relative directcoefficients is smallThe direct stiffness coefficients of force toangle and moment to displacement are relatively insensitiveto the variation of the rotary speed The magnitudes of thecross-coupled stiffness of force to displacement and momentto angle are comparable to those of the direct stiffnesswhich demonstrates the importance of hydrodynamic effectsUnlike the stiffness the damping coefficients are independentof the rotary speed in the aligned condition The reasonfor this is that the perturbed pressure due to the perturbedvelocity is not related to the rotary speed of the rotor
36 Effects of Eccentricity Ratio on the Static Performances ofthe Bearings The influence of eccentricity ratio in alignedcondition on static performances of each bearing is as shownin Figure 11 The tilting ratio is assumed as zero to excludethe influence of tilting effect Figure 11(a) indicates that thevalue of quality for each bearing decreases slowly with theeccentricity ratio As is shown in Figure 11(b) the powerloss is almost constant at first and then increases withincreased eccentricity ratio The maximum temperature riseacross the bearing length is about 16∘C at the eccentricityratio equal to 05 This is expected since a smaller clearanceproduces a larger frictional power loss and a smaller flowrate However it should be pointed out that in the alignedcondition the static characteristics of the hydrostatic water-lubricated journal bearings vary slightly with eccentricityratio
Mathematical Problems in Engineering 13
00 01 02 03 04 05
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Eccentricity ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
times108
(a) The stiffness of force to displacement versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Eccentricity ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
times106
minus1
minus2
(c) The stiffness of moment to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
times107
minus1
minus2
minus3
minus4
(d) The stiffness of moment to displacement versus eccentricityratio
Figure 12 The effect of eccentricity ratio on the stiffness coefficients
37 Effects of Eccentricity Ratio on the Dynamic Characteristicsof the Bearings Figures 12 and 13 show a variation ofstiffness and damping coefficients of each bearing versusthe eccentricity ratio It may be noticed that the dynamiccoefficients are almost constant as the eccentricity ratioincreases from 0 to 01 The direct stiffness of force todisplacement and moment to angle decreases gradually withincreased eccentricity ratio Generally the coupled stiffnessvaries significantly with the eccentricity ratio The coupledcoefficients of force to angle and moment to displacement
for the front bearing have the same magnitude as thosefor the rear bearing but in the opposite direction Thedamping coefficients are also relatively insensitive to theeccentricity ratio when it is not larger than 01 However inlarger eccentric condition the damping coefficients vary witheccentricity ratio and the larger the eccentricity ratio is thegreater the coefficients change In summary for the smalleccentric condition (le01) the influence of eccentricity ratioon the full dynamic coefficients for the hydrostatic water-lubricated journal bearing operating in aligned condition can
14 Mathematical Problems in Engineering
00 01 02 03 04 05
00
04
08
12
16
20
Eccentricity ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus04
minus08
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus eccentricity ratio
00 01 02 03 04 05
00
05
10
15
20
Eccentricity ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus05
minus10
minus15
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Eccentricity ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
minus04
minus08
(c) The damping of moment to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Eccentricity ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
times104
minus04
minus08
minus12
minus16
minus20
(d) The damping of moment to displacement versus eccentricityratio
Figure 13 The effect of eccentricity ratio on the damping coefficients
be ignored however for a larger eccentric condition theinfluence should be fully discussed
4 Conclusion
This paper investigated the complete dynamic coefficientsfor two hydrostatic water-lubricated journal bearings usedto support a rigid rotor considering the translational andtilting motion The bulk turbulent flow model and FDMmethod is used to numerically predict the performance of the
bearingsThe results show that the proposedwater-lubricatedhydrostatic bearing has the potential to fulfill the target oflower power loss temperature rise and larger load capacityat high speed On the basis of the results presented thefollowing conclusions can be drawn
(1) For a small tilting ratio (lt04) the influence of tiltingratio on the static and dynamic characteristics of awater-lubricated hydrostatic journal bearing is rela-tively small however when the tilting ratio continues
Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
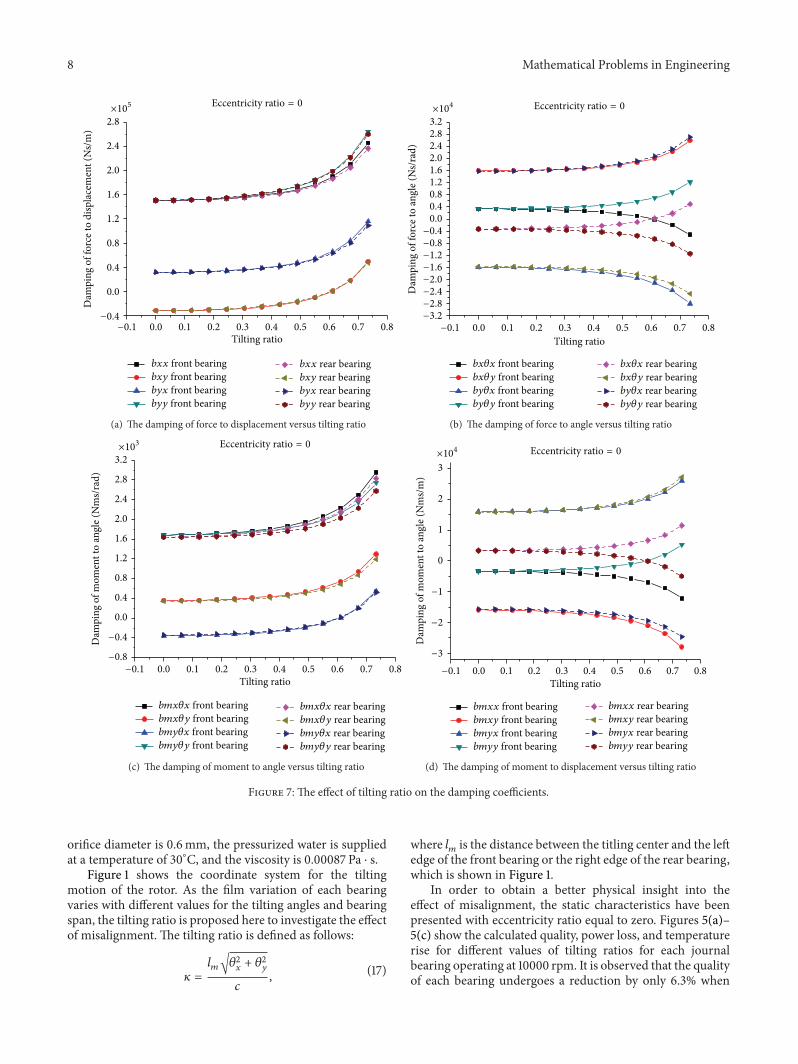
8 Mathematical Problems in Engineering
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
Tilting ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
Eccentricity ratio = 0
minus04
minus01
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus tilting ratio
00 01 02 03 04 05 06 07 08
000408121620242832
Tilting ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus12
minus16
minus20
minus24
minus28
minus32
minus01
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
00
04
08
12
16
20
24
28
32
Tilting ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
Eccentricity ratio = 0
minus04
minus08
minus01
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus tilting ratio
00 01 02 03 04 05 06 07 08
0
1
2
3
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Tilting ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
Eccentricity ratio = 0
minus01
minus1
minus2
minus3
times104
(d) The damping of moment to displacement versus tilting ratio
Figure 7 The effect of tilting ratio on the damping coefficients
orifice diameter is 06mm the pressurized water is suppliedat a temperature of 30∘C and the viscosity is 000087 Pa sdot s
Figure 1 shows the coordinate system for the tiltingmotion of the rotor As the film variation of each bearingvaries with different values for the tilting angles and bearingspan the tilting ratio is proposed here to investigate the effectof misalignment The tilting ratio is defined as follows
120581 =
119897119898radic1205792
119909+ 1205792
119910
119888
(17)
where 119897119898is the distance between the titling center and the left
edge of the front bearing or the right edge of the rear bearingwhich is shown in Figure 1
In order to obtain a better physical insight into theeffect of misalignment the static characteristics have beenpresented with eccentricity ratio equal to zero Figures 5(a)ndash5(c) show the calculated quality power loss and temperaturerise for different values of tilting ratios for each journalbearing operating at 10000 rpm It is observed that the qualityof each bearing undergoes a reduction by only 63 when
Mathematical Problems in Engineering 9
5000 10000 15000 20000 25000 3000020
21
22
23
24
25G
ross
qua
lity
(Lm
in)
Rotary speed (rpm)
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
5000 10000 15000 20000 25000 300000
200
400
600
800
1000
1200
1400
Rotary speed (rpm)
Gro
ss p
ower
loss
(W)
(b) The effect of rotary speed on the power loss
5000 10000 15000 20000 25000 300000
1
2
3
4
5
6
7
8
9
10
Rotary speed (rpm)
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 8 The effect of rotary speed on the static performance of the water-lubricated bearing
the tilting ratio increases from zero to 075 The total powerloss of each bearing keeps almost unchanged when the tiltingratio is not greater than 04 However when the tiltingratio continues to increase the power loss gets a slightincrease by approximately 5 Meanwhile the temperaturerise increases with increased tilting ratio The reason for thisis that increasing tilting angles will increase the film variationof each bearing which promote the hydrodynamic andturbulent effect It is noticed that the maximum temperaturerise for the investigated water-lubricated bearing is 17∘C forthe rotor-bearing system investigated here which is far lowerthan the conventional oil film bearings This in turn verifiesthe validation of the adiabatic assumption In conclusionwhen the tilting ratio is smaller than 04 the influence oftilting ratio on the static performance of a water-lubricatedhydrostatic journal bearing can be ignored
33 Effects of Tilting Ratio on the Dynamic Characteristicsof the Bearings Figures 6 and 7 show the variation of thedynamic coefficients of the two identical bearings in respectto the tilting ratio with a rotary speed of 10000 rpm Theeccentricity ratio is assumed to be zero to exclude the effectof the clearance change due to the eccentricity ratioThe solidlines represent the dynamic coefficients of the front journalbearing while the dotted lines represent those of the rearbearing
According to the results the dynamic coefficients of forceto displacement andmoment to angle for the front bearing areapproximately equal to those for the rear bearing due to thefact that the tilting center almost coincides with the bearingspan center However the coupled dynamic coefficients offorce to angle and moment to displacement for the twobearings have close proximitymagnitudes but in the opposite
10 Mathematical Problems in Engineering
5000 10000 15000 20000 25000 30000
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Rotary speed (rpm)
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
minus3
minus4
times108
(a) The stiffness of force to displacement versys rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Rotary speed (rpm)
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(b) The stiffness of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times106
(c) The stiffness of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(d) The stiffness ofmoment to displacement versus rotary speed
Figure 9 The effect of rotary speed on the stiffness coefficients
direction due to the fact that the two bearings are arranged atboth sides of the mass center which is the origin of the tiltingmotions It is observed that with the increase of the tiltingratio the stiffness and damping coefficients of the bearingskeep almost independent of the tilting ratio when it is notlarger than 04 however when the tilting ratio continuesto increase the effect on dynamic coefficients is significantwith a maximum variation rate of 167 for the stiffnessand 492 for the damping coefficients Furthermore thelarger the tilting ratio is the greater the differences amongthe coefficients are This can be ascribed to the variations
of the film thickness induced by the tilting angles andbearing span which can be calculated according to (5) Theresults indicate that for a small tilting ratio the effect ofthe misalignment on the performance of hydrostatic water-lubricated journal bearings can be ignored but for a relativelygreater tilting ratio the effect of misalignment should betaken into consideration
34 Effects of Rotary Speed on the Static Performances ofthe Bearings Figure 8 depicts the variation of the staticcharacteristics for each journal bearing in respect to
Mathematical Problems in Engineering 11
5000 10000 15000 20000 25000 30000
00
02
04
06
08
10
12
14
16
Rotary speed (rpm)
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus02
minus04
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus04
minus08
minus12
minus16
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
minus04
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Rotary speed (rpm)
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
minus04
minus08
minus12
minus16
minus20
times104
(d) The damping of moment to displacement versus rotary speed
Figure 10 The effect of rotary speed on the damping coefficients
the rotary speed In the case of a water-lubricated hydrostaticbearing operating with eccentricity ratio and tilting anglesequal to zero it may be observed that the static characteristicsof the front bearing are the same as those of the rearbearing As shown in Figure 8(a) the quality of each bearingapparently remains unchanged with increased rotary speedAs shown in Figures 8(b) and 8(c) the gross power loss foreach bearing increases dramatically from 123W to 1232Wwhen the rotary speed increases from 5000 rpm to 30000 rpmbecause the frictional power loss is closely related to therotary speed according to (12) Furthermore the temperature
rise undergoes a sharp increase from07∘C to 8∘C It should bepointed out that most of the predicted temperature rises arehigher than the actual values presumably due to the adiabaticassumption imposed on the analysis Considering the valuesof the temperature rise the adiabatic flow assumption is fullyjustified for the bearing studied However when the rotaryspeed continues to increase the energy equation should beincluded to predict the temperature rise precisely
35 Effects of Rotary Speed on the Dynamic Characteristics ofthe Bearings Figures 9 and 10 show the dynamic coefficients
12 Mathematical Problems in Engineering
00 01 02 03 04 05220
225
230
235
240G
ross
qua
lity
(Lm
in)
Eccentricity ratio
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
00 01 02 03 04 05240
241
242
243
244
245
246
247
248
249
250
Gro
ss p
ower
loss
(W)
Eccentricity ratio
(b) The effect of rotary speed on the power loss
00 01 02 03 04 05148
150
152
154
156
158
160
Eccentricity ratio
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 11 The effect of eccentricity ratio on the static performance of the water-lubricated bearing
of each water-lubricated bearing in respect to the rotaryspeedThe eccentricity ratio and tilting angles are assumed aszero to exclude their influences on the film thickness Accord-ing to the results a higher rotary speed generates largercoupled stiffness of force to displacement and moment toangle but the influence of rotary speed on the relative directcoefficients is smallThe direct stiffness coefficients of force toangle and moment to displacement are relatively insensitiveto the variation of the rotary speed The magnitudes of thecross-coupled stiffness of force to displacement and momentto angle are comparable to those of the direct stiffnesswhich demonstrates the importance of hydrodynamic effectsUnlike the stiffness the damping coefficients are independentof the rotary speed in the aligned condition The reasonfor this is that the perturbed pressure due to the perturbedvelocity is not related to the rotary speed of the rotor
36 Effects of Eccentricity Ratio on the Static Performances ofthe Bearings The influence of eccentricity ratio in alignedcondition on static performances of each bearing is as shownin Figure 11 The tilting ratio is assumed as zero to excludethe influence of tilting effect Figure 11(a) indicates that thevalue of quality for each bearing decreases slowly with theeccentricity ratio As is shown in Figure 11(b) the powerloss is almost constant at first and then increases withincreased eccentricity ratio The maximum temperature riseacross the bearing length is about 16∘C at the eccentricityratio equal to 05 This is expected since a smaller clearanceproduces a larger frictional power loss and a smaller flowrate However it should be pointed out that in the alignedcondition the static characteristics of the hydrostatic water-lubricated journal bearings vary slightly with eccentricityratio
Mathematical Problems in Engineering 13
00 01 02 03 04 05
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Eccentricity ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
times108
(a) The stiffness of force to displacement versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Eccentricity ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
times106
minus1
minus2
(c) The stiffness of moment to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
times107
minus1
minus2
minus3
minus4
(d) The stiffness of moment to displacement versus eccentricityratio
Figure 12 The effect of eccentricity ratio on the stiffness coefficients
37 Effects of Eccentricity Ratio on the Dynamic Characteristicsof the Bearings Figures 12 and 13 show a variation ofstiffness and damping coefficients of each bearing versusthe eccentricity ratio It may be noticed that the dynamiccoefficients are almost constant as the eccentricity ratioincreases from 0 to 01 The direct stiffness of force todisplacement and moment to angle decreases gradually withincreased eccentricity ratio Generally the coupled stiffnessvaries significantly with the eccentricity ratio The coupledcoefficients of force to angle and moment to displacement
for the front bearing have the same magnitude as thosefor the rear bearing but in the opposite direction Thedamping coefficients are also relatively insensitive to theeccentricity ratio when it is not larger than 01 However inlarger eccentric condition the damping coefficients vary witheccentricity ratio and the larger the eccentricity ratio is thegreater the coefficients change In summary for the smalleccentric condition (le01) the influence of eccentricity ratioon the full dynamic coefficients for the hydrostatic water-lubricated journal bearing operating in aligned condition can
14 Mathematical Problems in Engineering
00 01 02 03 04 05
00
04
08
12
16
20
Eccentricity ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus04
minus08
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus eccentricity ratio
00 01 02 03 04 05
00
05
10
15
20
Eccentricity ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus05
minus10
minus15
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Eccentricity ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
minus04
minus08
(c) The damping of moment to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Eccentricity ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
times104
minus04
minus08
minus12
minus16
minus20
(d) The damping of moment to displacement versus eccentricityratio
Figure 13 The effect of eccentricity ratio on the damping coefficients
be ignored however for a larger eccentric condition theinfluence should be fully discussed
4 Conclusion
This paper investigated the complete dynamic coefficientsfor two hydrostatic water-lubricated journal bearings usedto support a rigid rotor considering the translational andtilting motion The bulk turbulent flow model and FDMmethod is used to numerically predict the performance of the
bearingsThe results show that the proposedwater-lubricatedhydrostatic bearing has the potential to fulfill the target oflower power loss temperature rise and larger load capacityat high speed On the basis of the results presented thefollowing conclusions can be drawn
(1) For a small tilting ratio (lt04) the influence of tiltingratio on the static and dynamic characteristics of awater-lubricated hydrostatic journal bearing is rela-tively small however when the tilting ratio continues
Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
5000 10000 15000 20000 25000 3000020
21
22
23
24
25G
ross
qua
lity
(Lm
in)
Rotary speed (rpm)
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
5000 10000 15000 20000 25000 300000
200
400
600
800
1000
1200
1400
Rotary speed (rpm)
Gro
ss p
ower
loss
(W)
(b) The effect of rotary speed on the power loss
5000 10000 15000 20000 25000 300000
1
2
3
4
5
6
7
8
9
10
Rotary speed (rpm)
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 8 The effect of rotary speed on the static performance of the water-lubricated bearing
the tilting ratio increases from zero to 075 The total powerloss of each bearing keeps almost unchanged when the tiltingratio is not greater than 04 However when the tiltingratio continues to increase the power loss gets a slightincrease by approximately 5 Meanwhile the temperaturerise increases with increased tilting ratio The reason for thisis that increasing tilting angles will increase the film variationof each bearing which promote the hydrodynamic andturbulent effect It is noticed that the maximum temperaturerise for the investigated water-lubricated bearing is 17∘C forthe rotor-bearing system investigated here which is far lowerthan the conventional oil film bearings This in turn verifiesthe validation of the adiabatic assumption In conclusionwhen the tilting ratio is smaller than 04 the influence oftilting ratio on the static performance of a water-lubricatedhydrostatic journal bearing can be ignored
33 Effects of Tilting Ratio on the Dynamic Characteristicsof the Bearings Figures 6 and 7 show the variation of thedynamic coefficients of the two identical bearings in respectto the tilting ratio with a rotary speed of 10000 rpm Theeccentricity ratio is assumed to be zero to exclude the effectof the clearance change due to the eccentricity ratioThe solidlines represent the dynamic coefficients of the front journalbearing while the dotted lines represent those of the rearbearing
According to the results the dynamic coefficients of forceto displacement andmoment to angle for the front bearing areapproximately equal to those for the rear bearing due to thefact that the tilting center almost coincides with the bearingspan center However the coupled dynamic coefficients offorce to angle and moment to displacement for the twobearings have close proximitymagnitudes but in the opposite
10 Mathematical Problems in Engineering
5000 10000 15000 20000 25000 30000
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Rotary speed (rpm)
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
minus3
minus4
times108
(a) The stiffness of force to displacement versys rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Rotary speed (rpm)
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(b) The stiffness of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times106
(c) The stiffness of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(d) The stiffness ofmoment to displacement versus rotary speed
Figure 9 The effect of rotary speed on the stiffness coefficients
direction due to the fact that the two bearings are arranged atboth sides of the mass center which is the origin of the tiltingmotions It is observed that with the increase of the tiltingratio the stiffness and damping coefficients of the bearingskeep almost independent of the tilting ratio when it is notlarger than 04 however when the tilting ratio continuesto increase the effect on dynamic coefficients is significantwith a maximum variation rate of 167 for the stiffnessand 492 for the damping coefficients Furthermore thelarger the tilting ratio is the greater the differences amongthe coefficients are This can be ascribed to the variations
of the film thickness induced by the tilting angles andbearing span which can be calculated according to (5) Theresults indicate that for a small tilting ratio the effect ofthe misalignment on the performance of hydrostatic water-lubricated journal bearings can be ignored but for a relativelygreater tilting ratio the effect of misalignment should betaken into consideration
34 Effects of Rotary Speed on the Static Performances ofthe Bearings Figure 8 depicts the variation of the staticcharacteristics for each journal bearing in respect to
Mathematical Problems in Engineering 11
5000 10000 15000 20000 25000 30000
00
02
04
06
08
10
12
14
16
Rotary speed (rpm)
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus02
minus04
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus04
minus08
minus12
minus16
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
minus04
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Rotary speed (rpm)
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
minus04
minus08
minus12
minus16
minus20
times104
(d) The damping of moment to displacement versus rotary speed
Figure 10 The effect of rotary speed on the damping coefficients
the rotary speed In the case of a water-lubricated hydrostaticbearing operating with eccentricity ratio and tilting anglesequal to zero it may be observed that the static characteristicsof the front bearing are the same as those of the rearbearing As shown in Figure 8(a) the quality of each bearingapparently remains unchanged with increased rotary speedAs shown in Figures 8(b) and 8(c) the gross power loss foreach bearing increases dramatically from 123W to 1232Wwhen the rotary speed increases from 5000 rpm to 30000 rpmbecause the frictional power loss is closely related to therotary speed according to (12) Furthermore the temperature
rise undergoes a sharp increase from07∘C to 8∘C It should bepointed out that most of the predicted temperature rises arehigher than the actual values presumably due to the adiabaticassumption imposed on the analysis Considering the valuesof the temperature rise the adiabatic flow assumption is fullyjustified for the bearing studied However when the rotaryspeed continues to increase the energy equation should beincluded to predict the temperature rise precisely
35 Effects of Rotary Speed on the Dynamic Characteristics ofthe Bearings Figures 9 and 10 show the dynamic coefficients
12 Mathematical Problems in Engineering
00 01 02 03 04 05220
225
230
235
240G
ross
qua
lity
(Lm
in)
Eccentricity ratio
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
00 01 02 03 04 05240
241
242
243
244
245
246
247
248
249
250
Gro
ss p
ower
loss
(W)
Eccentricity ratio
(b) The effect of rotary speed on the power loss
00 01 02 03 04 05148
150
152
154
156
158
160
Eccentricity ratio
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 11 The effect of eccentricity ratio on the static performance of the water-lubricated bearing
of each water-lubricated bearing in respect to the rotaryspeedThe eccentricity ratio and tilting angles are assumed aszero to exclude their influences on the film thickness Accord-ing to the results a higher rotary speed generates largercoupled stiffness of force to displacement and moment toangle but the influence of rotary speed on the relative directcoefficients is smallThe direct stiffness coefficients of force toangle and moment to displacement are relatively insensitiveto the variation of the rotary speed The magnitudes of thecross-coupled stiffness of force to displacement and momentto angle are comparable to those of the direct stiffnesswhich demonstrates the importance of hydrodynamic effectsUnlike the stiffness the damping coefficients are independentof the rotary speed in the aligned condition The reasonfor this is that the perturbed pressure due to the perturbedvelocity is not related to the rotary speed of the rotor
36 Effects of Eccentricity Ratio on the Static Performances ofthe Bearings The influence of eccentricity ratio in alignedcondition on static performances of each bearing is as shownin Figure 11 The tilting ratio is assumed as zero to excludethe influence of tilting effect Figure 11(a) indicates that thevalue of quality for each bearing decreases slowly with theeccentricity ratio As is shown in Figure 11(b) the powerloss is almost constant at first and then increases withincreased eccentricity ratio The maximum temperature riseacross the bearing length is about 16∘C at the eccentricityratio equal to 05 This is expected since a smaller clearanceproduces a larger frictional power loss and a smaller flowrate However it should be pointed out that in the alignedcondition the static characteristics of the hydrostatic water-lubricated journal bearings vary slightly with eccentricityratio
Mathematical Problems in Engineering 13
00 01 02 03 04 05
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Eccentricity ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
times108
(a) The stiffness of force to displacement versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Eccentricity ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
times106
minus1
minus2
(c) The stiffness of moment to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
times107
minus1
minus2
minus3
minus4
(d) The stiffness of moment to displacement versus eccentricityratio
Figure 12 The effect of eccentricity ratio on the stiffness coefficients
37 Effects of Eccentricity Ratio on the Dynamic Characteristicsof the Bearings Figures 12 and 13 show a variation ofstiffness and damping coefficients of each bearing versusthe eccentricity ratio It may be noticed that the dynamiccoefficients are almost constant as the eccentricity ratioincreases from 0 to 01 The direct stiffness of force todisplacement and moment to angle decreases gradually withincreased eccentricity ratio Generally the coupled stiffnessvaries significantly with the eccentricity ratio The coupledcoefficients of force to angle and moment to displacement
for the front bearing have the same magnitude as thosefor the rear bearing but in the opposite direction Thedamping coefficients are also relatively insensitive to theeccentricity ratio when it is not larger than 01 However inlarger eccentric condition the damping coefficients vary witheccentricity ratio and the larger the eccentricity ratio is thegreater the coefficients change In summary for the smalleccentric condition (le01) the influence of eccentricity ratioon the full dynamic coefficients for the hydrostatic water-lubricated journal bearing operating in aligned condition can
14 Mathematical Problems in Engineering
00 01 02 03 04 05
00
04
08
12
16
20
Eccentricity ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus04
minus08
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus eccentricity ratio
00 01 02 03 04 05
00
05
10
15
20
Eccentricity ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus05
minus10
minus15
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Eccentricity ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
minus04
minus08
(c) The damping of moment to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Eccentricity ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
times104
minus04
minus08
minus12
minus16
minus20
(d) The damping of moment to displacement versus eccentricityratio
Figure 13 The effect of eccentricity ratio on the damping coefficients
be ignored however for a larger eccentric condition theinfluence should be fully discussed
4 Conclusion
This paper investigated the complete dynamic coefficientsfor two hydrostatic water-lubricated journal bearings usedto support a rigid rotor considering the translational andtilting motion The bulk turbulent flow model and FDMmethod is used to numerically predict the performance of the
bearingsThe results show that the proposedwater-lubricatedhydrostatic bearing has the potential to fulfill the target oflower power loss temperature rise and larger load capacityat high speed On the basis of the results presented thefollowing conclusions can be drawn
(1) For a small tilting ratio (lt04) the influence of tiltingratio on the static and dynamic characteristics of awater-lubricated hydrostatic journal bearing is rela-tively small however when the tilting ratio continues
Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
5000 10000 15000 20000 25000 30000
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Rotary speed (rpm)
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
minus3
minus4
times108
(a) The stiffness of force to displacement versys rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Rotary speed (rpm)
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(b) The stiffness of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
minus1
minus2
minus3
minus4
minus5
times106
(c) The stiffness of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
0
1
2
3
4
5
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
minus1
minus2
minus3
minus4
minus5
times107
(d) The stiffness ofmoment to displacement versus rotary speed
Figure 9 The effect of rotary speed on the stiffness coefficients
direction due to the fact that the two bearings are arranged atboth sides of the mass center which is the origin of the tiltingmotions It is observed that with the increase of the tiltingratio the stiffness and damping coefficients of the bearingskeep almost independent of the tilting ratio when it is notlarger than 04 however when the tilting ratio continuesto increase the effect on dynamic coefficients is significantwith a maximum variation rate of 167 for the stiffnessand 492 for the damping coefficients Furthermore thelarger the tilting ratio is the greater the differences amongthe coefficients are This can be ascribed to the variations
of the film thickness induced by the tilting angles andbearing span which can be calculated according to (5) Theresults indicate that for a small tilting ratio the effect ofthe misalignment on the performance of hydrostatic water-lubricated journal bearings can be ignored but for a relativelygreater tilting ratio the effect of misalignment should betaken into consideration
34 Effects of Rotary Speed on the Static Performances ofthe Bearings Figure 8 depicts the variation of the staticcharacteristics for each journal bearing in respect to
Mathematical Problems in Engineering 11
5000 10000 15000 20000 25000 30000
00
02
04
06
08
10
12
14
16
Rotary speed (rpm)
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus02
minus04
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus04
minus08
minus12
minus16
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
minus04
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Rotary speed (rpm)
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
minus04
minus08
minus12
minus16
minus20
times104
(d) The damping of moment to displacement versus rotary speed
Figure 10 The effect of rotary speed on the damping coefficients
the rotary speed In the case of a water-lubricated hydrostaticbearing operating with eccentricity ratio and tilting anglesequal to zero it may be observed that the static characteristicsof the front bearing are the same as those of the rearbearing As shown in Figure 8(a) the quality of each bearingapparently remains unchanged with increased rotary speedAs shown in Figures 8(b) and 8(c) the gross power loss foreach bearing increases dramatically from 123W to 1232Wwhen the rotary speed increases from 5000 rpm to 30000 rpmbecause the frictional power loss is closely related to therotary speed according to (12) Furthermore the temperature
rise undergoes a sharp increase from07∘C to 8∘C It should bepointed out that most of the predicted temperature rises arehigher than the actual values presumably due to the adiabaticassumption imposed on the analysis Considering the valuesof the temperature rise the adiabatic flow assumption is fullyjustified for the bearing studied However when the rotaryspeed continues to increase the energy equation should beincluded to predict the temperature rise precisely
35 Effects of Rotary Speed on the Dynamic Characteristics ofthe Bearings Figures 9 and 10 show the dynamic coefficients
12 Mathematical Problems in Engineering
00 01 02 03 04 05220
225
230
235
240G
ross
qua
lity
(Lm
in)
Eccentricity ratio
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
00 01 02 03 04 05240
241
242
243
244
245
246
247
248
249
250
Gro
ss p
ower
loss
(W)
Eccentricity ratio
(b) The effect of rotary speed on the power loss
00 01 02 03 04 05148
150
152
154
156
158
160
Eccentricity ratio
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 11 The effect of eccentricity ratio on the static performance of the water-lubricated bearing
of each water-lubricated bearing in respect to the rotaryspeedThe eccentricity ratio and tilting angles are assumed aszero to exclude their influences on the film thickness Accord-ing to the results a higher rotary speed generates largercoupled stiffness of force to displacement and moment toangle but the influence of rotary speed on the relative directcoefficients is smallThe direct stiffness coefficients of force toangle and moment to displacement are relatively insensitiveto the variation of the rotary speed The magnitudes of thecross-coupled stiffness of force to displacement and momentto angle are comparable to those of the direct stiffnesswhich demonstrates the importance of hydrodynamic effectsUnlike the stiffness the damping coefficients are independentof the rotary speed in the aligned condition The reasonfor this is that the perturbed pressure due to the perturbedvelocity is not related to the rotary speed of the rotor
36 Effects of Eccentricity Ratio on the Static Performances ofthe Bearings The influence of eccentricity ratio in alignedcondition on static performances of each bearing is as shownin Figure 11 The tilting ratio is assumed as zero to excludethe influence of tilting effect Figure 11(a) indicates that thevalue of quality for each bearing decreases slowly with theeccentricity ratio As is shown in Figure 11(b) the powerloss is almost constant at first and then increases withincreased eccentricity ratio The maximum temperature riseacross the bearing length is about 16∘C at the eccentricityratio equal to 05 This is expected since a smaller clearanceproduces a larger frictional power loss and a smaller flowrate However it should be pointed out that in the alignedcondition the static characteristics of the hydrostatic water-lubricated journal bearings vary slightly with eccentricityratio
Mathematical Problems in Engineering 13
00 01 02 03 04 05
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Eccentricity ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
times108
(a) The stiffness of force to displacement versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Eccentricity ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
times106
minus1
minus2
(c) The stiffness of moment to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
times107
minus1
minus2
minus3
minus4
(d) The stiffness of moment to displacement versus eccentricityratio
Figure 12 The effect of eccentricity ratio on the stiffness coefficients
37 Effects of Eccentricity Ratio on the Dynamic Characteristicsof the Bearings Figures 12 and 13 show a variation ofstiffness and damping coefficients of each bearing versusthe eccentricity ratio It may be noticed that the dynamiccoefficients are almost constant as the eccentricity ratioincreases from 0 to 01 The direct stiffness of force todisplacement and moment to angle decreases gradually withincreased eccentricity ratio Generally the coupled stiffnessvaries significantly with the eccentricity ratio The coupledcoefficients of force to angle and moment to displacement
for the front bearing have the same magnitude as thosefor the rear bearing but in the opposite direction Thedamping coefficients are also relatively insensitive to theeccentricity ratio when it is not larger than 01 However inlarger eccentric condition the damping coefficients vary witheccentricity ratio and the larger the eccentricity ratio is thegreater the coefficients change In summary for the smalleccentric condition (le01) the influence of eccentricity ratioon the full dynamic coefficients for the hydrostatic water-lubricated journal bearing operating in aligned condition can
14 Mathematical Problems in Engineering
00 01 02 03 04 05
00
04
08
12
16
20
Eccentricity ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus04
minus08
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus eccentricity ratio
00 01 02 03 04 05
00
05
10
15
20
Eccentricity ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus05
minus10
minus15
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Eccentricity ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
minus04
minus08
(c) The damping of moment to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Eccentricity ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
times104
minus04
minus08
minus12
minus16
minus20
(d) The damping of moment to displacement versus eccentricityratio
Figure 13 The effect of eccentricity ratio on the damping coefficients
be ignored however for a larger eccentric condition theinfluence should be fully discussed
4 Conclusion
This paper investigated the complete dynamic coefficientsfor two hydrostatic water-lubricated journal bearings usedto support a rigid rotor considering the translational andtilting motion The bulk turbulent flow model and FDMmethod is used to numerically predict the performance of the
bearingsThe results show that the proposedwater-lubricatedhydrostatic bearing has the potential to fulfill the target oflower power loss temperature rise and larger load capacityat high speed On the basis of the results presented thefollowing conclusions can be drawn
(1) For a small tilting ratio (lt04) the influence of tiltingratio on the static and dynamic characteristics of awater-lubricated hydrostatic journal bearing is rela-tively small however when the tilting ratio continues
Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
5000 10000 15000 20000 25000 30000
00
02
04
06
08
10
12
14
16
Rotary speed (rpm)
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus02
minus04
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus04
minus08
minus12
minus16
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Rotary speed (rpm)
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
minus04
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
(c) The damping of moment to angle versus rotary speed
5000 10000 15000 20000 25000 30000
00
04
08
12
16
20
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Rotary speed (rpm)
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
minus04
minus08
minus12
minus16
minus20
times104
(d) The damping of moment to displacement versus rotary speed
Figure 10 The effect of rotary speed on the damping coefficients
the rotary speed In the case of a water-lubricated hydrostaticbearing operating with eccentricity ratio and tilting anglesequal to zero it may be observed that the static characteristicsof the front bearing are the same as those of the rearbearing As shown in Figure 8(a) the quality of each bearingapparently remains unchanged with increased rotary speedAs shown in Figures 8(b) and 8(c) the gross power loss foreach bearing increases dramatically from 123W to 1232Wwhen the rotary speed increases from 5000 rpm to 30000 rpmbecause the frictional power loss is closely related to therotary speed according to (12) Furthermore the temperature
rise undergoes a sharp increase from07∘C to 8∘C It should bepointed out that most of the predicted temperature rises arehigher than the actual values presumably due to the adiabaticassumption imposed on the analysis Considering the valuesof the temperature rise the adiabatic flow assumption is fullyjustified for the bearing studied However when the rotaryspeed continues to increase the energy equation should beincluded to predict the temperature rise precisely
35 Effects of Rotary Speed on the Dynamic Characteristics ofthe Bearings Figures 9 and 10 show the dynamic coefficients
12 Mathematical Problems in Engineering
00 01 02 03 04 05220
225
230
235
240G
ross
qua
lity
(Lm
in)
Eccentricity ratio
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
00 01 02 03 04 05240
241
242
243
244
245
246
247
248
249
250
Gro
ss p
ower
loss
(W)
Eccentricity ratio
(b) The effect of rotary speed on the power loss
00 01 02 03 04 05148
150
152
154
156
158
160
Eccentricity ratio
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 11 The effect of eccentricity ratio on the static performance of the water-lubricated bearing
of each water-lubricated bearing in respect to the rotaryspeedThe eccentricity ratio and tilting angles are assumed aszero to exclude their influences on the film thickness Accord-ing to the results a higher rotary speed generates largercoupled stiffness of force to displacement and moment toangle but the influence of rotary speed on the relative directcoefficients is smallThe direct stiffness coefficients of force toangle and moment to displacement are relatively insensitiveto the variation of the rotary speed The magnitudes of thecross-coupled stiffness of force to displacement and momentto angle are comparable to those of the direct stiffnesswhich demonstrates the importance of hydrodynamic effectsUnlike the stiffness the damping coefficients are independentof the rotary speed in the aligned condition The reasonfor this is that the perturbed pressure due to the perturbedvelocity is not related to the rotary speed of the rotor
36 Effects of Eccentricity Ratio on the Static Performances ofthe Bearings The influence of eccentricity ratio in alignedcondition on static performances of each bearing is as shownin Figure 11 The tilting ratio is assumed as zero to excludethe influence of tilting effect Figure 11(a) indicates that thevalue of quality for each bearing decreases slowly with theeccentricity ratio As is shown in Figure 11(b) the powerloss is almost constant at first and then increases withincreased eccentricity ratio The maximum temperature riseacross the bearing length is about 16∘C at the eccentricityratio equal to 05 This is expected since a smaller clearanceproduces a larger frictional power loss and a smaller flowrate However it should be pointed out that in the alignedcondition the static characteristics of the hydrostatic water-lubricated journal bearings vary slightly with eccentricityratio
Mathematical Problems in Engineering 13
00 01 02 03 04 05
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Eccentricity ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
times108
(a) The stiffness of force to displacement versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Eccentricity ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
times106
minus1
minus2
(c) The stiffness of moment to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
times107
minus1
minus2
minus3
minus4
(d) The stiffness of moment to displacement versus eccentricityratio
Figure 12 The effect of eccentricity ratio on the stiffness coefficients
37 Effects of Eccentricity Ratio on the Dynamic Characteristicsof the Bearings Figures 12 and 13 show a variation ofstiffness and damping coefficients of each bearing versusthe eccentricity ratio It may be noticed that the dynamiccoefficients are almost constant as the eccentricity ratioincreases from 0 to 01 The direct stiffness of force todisplacement and moment to angle decreases gradually withincreased eccentricity ratio Generally the coupled stiffnessvaries significantly with the eccentricity ratio The coupledcoefficients of force to angle and moment to displacement
for the front bearing have the same magnitude as thosefor the rear bearing but in the opposite direction Thedamping coefficients are also relatively insensitive to theeccentricity ratio when it is not larger than 01 However inlarger eccentric condition the damping coefficients vary witheccentricity ratio and the larger the eccentricity ratio is thegreater the coefficients change In summary for the smalleccentric condition (le01) the influence of eccentricity ratioon the full dynamic coefficients for the hydrostatic water-lubricated journal bearing operating in aligned condition can
14 Mathematical Problems in Engineering
00 01 02 03 04 05
00
04
08
12
16
20
Eccentricity ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus04
minus08
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus eccentricity ratio
00 01 02 03 04 05
00
05
10
15
20
Eccentricity ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus05
minus10
minus15
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Eccentricity ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
minus04
minus08
(c) The damping of moment to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Eccentricity ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
times104
minus04
minus08
minus12
minus16
minus20
(d) The damping of moment to displacement versus eccentricityratio
Figure 13 The effect of eccentricity ratio on the damping coefficients
be ignored however for a larger eccentric condition theinfluence should be fully discussed
4 Conclusion
This paper investigated the complete dynamic coefficientsfor two hydrostatic water-lubricated journal bearings usedto support a rigid rotor considering the translational andtilting motion The bulk turbulent flow model and FDMmethod is used to numerically predict the performance of the
bearingsThe results show that the proposedwater-lubricatedhydrostatic bearing has the potential to fulfill the target oflower power loss temperature rise and larger load capacityat high speed On the basis of the results presented thefollowing conclusions can be drawn
(1) For a small tilting ratio (lt04) the influence of tiltingratio on the static and dynamic characteristics of awater-lubricated hydrostatic journal bearing is rela-tively small however when the tilting ratio continues
Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
00 01 02 03 04 05220
225
230
235
240G
ross
qua
lity
(Lm
in)
Eccentricity ratio
Front bearingRear bearing
(a) The effect of rotary speed on the quality
Front bearingRear bearing
00 01 02 03 04 05240
241
242
243
244
245
246
247
248
249
250
Gro
ss p
ower
loss
(W)
Eccentricity ratio
(b) The effect of rotary speed on the power loss
00 01 02 03 04 05148
150
152
154
156
158
160
Eccentricity ratio
Front bearingRear bearing
Tem
pera
ture
rise
(∘C)
(c) The effect of rotary speed on the temperature rise
Figure 11 The effect of eccentricity ratio on the static performance of the water-lubricated bearing
of each water-lubricated bearing in respect to the rotaryspeedThe eccentricity ratio and tilting angles are assumed aszero to exclude their influences on the film thickness Accord-ing to the results a higher rotary speed generates largercoupled stiffness of force to displacement and moment toangle but the influence of rotary speed on the relative directcoefficients is smallThe direct stiffness coefficients of force toangle and moment to displacement are relatively insensitiveto the variation of the rotary speed The magnitudes of thecross-coupled stiffness of force to displacement and momentto angle are comparable to those of the direct stiffnesswhich demonstrates the importance of hydrodynamic effectsUnlike the stiffness the damping coefficients are independentof the rotary speed in the aligned condition The reasonfor this is that the perturbed pressure due to the perturbedvelocity is not related to the rotary speed of the rotor
36 Effects of Eccentricity Ratio on the Static Performances ofthe Bearings The influence of eccentricity ratio in alignedcondition on static performances of each bearing is as shownin Figure 11 The tilting ratio is assumed as zero to excludethe influence of tilting effect Figure 11(a) indicates that thevalue of quality for each bearing decreases slowly with theeccentricity ratio As is shown in Figure 11(b) the powerloss is almost constant at first and then increases withincreased eccentricity ratio The maximum temperature riseacross the bearing length is about 16∘C at the eccentricityratio equal to 05 This is expected since a smaller clearanceproduces a larger frictional power loss and a smaller flowrate However it should be pointed out that in the alignedcondition the static characteristics of the hydrostatic water-lubricated journal bearings vary slightly with eccentricityratio
Mathematical Problems in Engineering 13
00 01 02 03 04 05
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Eccentricity ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
times108
(a) The stiffness of force to displacement versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Eccentricity ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
times106
minus1
minus2
(c) The stiffness of moment to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
times107
minus1
minus2
minus3
minus4
(d) The stiffness of moment to displacement versus eccentricityratio
Figure 12 The effect of eccentricity ratio on the stiffness coefficients
37 Effects of Eccentricity Ratio on the Dynamic Characteristicsof the Bearings Figures 12 and 13 show a variation ofstiffness and damping coefficients of each bearing versusthe eccentricity ratio It may be noticed that the dynamiccoefficients are almost constant as the eccentricity ratioincreases from 0 to 01 The direct stiffness of force todisplacement and moment to angle decreases gradually withincreased eccentricity ratio Generally the coupled stiffnessvaries significantly with the eccentricity ratio The coupledcoefficients of force to angle and moment to displacement
for the front bearing have the same magnitude as thosefor the rear bearing but in the opposite direction Thedamping coefficients are also relatively insensitive to theeccentricity ratio when it is not larger than 01 However inlarger eccentric condition the damping coefficients vary witheccentricity ratio and the larger the eccentricity ratio is thegreater the coefficients change In summary for the smalleccentric condition (le01) the influence of eccentricity ratioon the full dynamic coefficients for the hydrostatic water-lubricated journal bearing operating in aligned condition can
14 Mathematical Problems in Engineering
00 01 02 03 04 05
00
04
08
12
16
20
Eccentricity ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus04
minus08
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus eccentricity ratio
00 01 02 03 04 05
00
05
10
15
20
Eccentricity ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus05
minus10
minus15
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Eccentricity ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
minus04
minus08
(c) The damping of moment to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Eccentricity ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
times104
minus04
minus08
minus12
minus16
minus20
(d) The damping of moment to displacement versus eccentricityratio
Figure 13 The effect of eccentricity ratio on the damping coefficients
be ignored however for a larger eccentric condition theinfluence should be fully discussed
4 Conclusion
This paper investigated the complete dynamic coefficientsfor two hydrostatic water-lubricated journal bearings usedto support a rigid rotor considering the translational andtilting motion The bulk turbulent flow model and FDMmethod is used to numerically predict the performance of the
bearingsThe results show that the proposedwater-lubricatedhydrostatic bearing has the potential to fulfill the target oflower power loss temperature rise and larger load capacityat high speed On the basis of the results presented thefollowing conclusions can be drawn
(1) For a small tilting ratio (lt04) the influence of tiltingratio on the static and dynamic characteristics of awater-lubricated hydrostatic journal bearing is rela-tively small however when the tilting ratio continues
Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 13
00 01 02 03 04 05
0
1
2
3
4St
iffne
ss o
f for
ce to
disp
lace
men
t (N
m)
Eccentricity ratio
kxx front bearingkxy front bearingkyx front bearingkyy front bearing
kxx rear bearingkxy rear bearingkyx rear bearingkyy rear bearing
minus1
minus2
times108
(a) The stiffness of force to displacement versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of f
orce
to an
gle (
Nr
ad)
Eccentricity ratio
kx120579x front bearingkx120579y front bearingky120579x front bearingky120579y front bearing
kx120579x rear bearingkx120579y rear bearingky120579x rear bearingky120579y rear bearing
minus1
minus2
minus3
minus4
times107
(b) The stiffness of force to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mr
ad)
Rotary speed (rpm)
kmx120579x front bearingkmx120579y front bearingkmy120579x front bearingkmy120579y front bearing
kmx120579x rear bearingkmx120579y rear bearingkmy120579x rear bearingkmy120579y rear bearing
times106
minus1
minus2
(c) The stiffness of moment to angle versus eccentricity ratio
00 01 02 03 04 05
0
1
2
3
4
Stiff
ness
of m
omen
t to
angl
e (N
mm
)
Rotary speed (rpm)
kmxx front bearingkmxy front bearingkmyx front bearingkmyy front bearing
kmxx rear bearingkmxy rear bearingkmyx rear bearingkmyy rear bearing
times107
minus1
minus2
minus3
minus4
(d) The stiffness of moment to displacement versus eccentricityratio
Figure 12 The effect of eccentricity ratio on the stiffness coefficients
37 Effects of Eccentricity Ratio on the Dynamic Characteristicsof the Bearings Figures 12 and 13 show a variation ofstiffness and damping coefficients of each bearing versusthe eccentricity ratio It may be noticed that the dynamiccoefficients are almost constant as the eccentricity ratioincreases from 0 to 01 The direct stiffness of force todisplacement and moment to angle decreases gradually withincreased eccentricity ratio Generally the coupled stiffnessvaries significantly with the eccentricity ratio The coupledcoefficients of force to angle and moment to displacement
for the front bearing have the same magnitude as thosefor the rear bearing but in the opposite direction Thedamping coefficients are also relatively insensitive to theeccentricity ratio when it is not larger than 01 However inlarger eccentric condition the damping coefficients vary witheccentricity ratio and the larger the eccentricity ratio is thegreater the coefficients change In summary for the smalleccentric condition (le01) the influence of eccentricity ratioon the full dynamic coefficients for the hydrostatic water-lubricated journal bearing operating in aligned condition can
14 Mathematical Problems in Engineering
00 01 02 03 04 05
00
04
08
12
16
20
Eccentricity ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus04
minus08
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus eccentricity ratio
00 01 02 03 04 05
00
05
10
15
20
Eccentricity ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus05
minus10
minus15
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Eccentricity ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
minus04
minus08
(c) The damping of moment to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Eccentricity ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
times104
minus04
minus08
minus12
minus16
minus20
(d) The damping of moment to displacement versus eccentricityratio
Figure 13 The effect of eccentricity ratio on the damping coefficients
be ignored however for a larger eccentric condition theinfluence should be fully discussed
4 Conclusion
This paper investigated the complete dynamic coefficientsfor two hydrostatic water-lubricated journal bearings usedto support a rigid rotor considering the translational andtilting motion The bulk turbulent flow model and FDMmethod is used to numerically predict the performance of the
bearingsThe results show that the proposedwater-lubricatedhydrostatic bearing has the potential to fulfill the target oflower power loss temperature rise and larger load capacityat high speed On the basis of the results presented thefollowing conclusions can be drawn
(1) For a small tilting ratio (lt04) the influence of tiltingratio on the static and dynamic characteristics of awater-lubricated hydrostatic journal bearing is rela-tively small however when the tilting ratio continues
Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

14 Mathematical Problems in Engineering
00 01 02 03 04 05
00
04
08
12
16
20
Eccentricity ratio
bxx front bearingbxy front bearingbyx front bearingbyy front bearing
bxx rear bearingbxy rear bearingbyx rear bearingbyy rear bearing
minus04
minus08
times105
Dam
ping
of f
orce
to d
ispla
cem
ent (
Ns
m)
(a) The damping of force to displacement versus eccentricity ratio
00 01 02 03 04 05
00
05
10
15
20
Eccentricity ratio
bx120579x front bearingbx120579y front bearingby120579x front bearingby120579y front bearing
bx120579x rear bearingbx120579y rear bearingby120579x rear bearingby120579y rear bearing
minus05
minus10
minus15
minus20
times104
Dam
ping
of f
orce
to an
gle (
Ns
rad)
(b) The damping of force to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Eccentricity ratio
bmx120579x front bearingbmx120579y front bearingbmy120579x front bearingbmy120579y front bearing
bmx120579x rear bearingbmx120579y rear bearingbmy120579x rear bearingbmy120579y rear bearing
times103
Dam
ping
of m
omen
t to
angl
e (N
ms
rad)
minus04
minus08
(c) The damping of moment to angle versus eccentricity ratio
00 01 02 03 04 05
00
04
08
12
16
20
24
Dam
ping
of m
omen
t to
angl
e (N
ms
m)
Eccentricity ratio
bmxx front bearingbmxy front bearingbmyx front bearingbmyy front bearing
bmxx rear bearingbmxy rear bearingbmyx rear bearingbmyy rear bearing
times104
minus04
minus08
minus12
minus16
minus20
(d) The damping of moment to displacement versus eccentricityratio
Figure 13 The effect of eccentricity ratio on the damping coefficients
be ignored however for a larger eccentric condition theinfluence should be fully discussed
4 Conclusion
This paper investigated the complete dynamic coefficientsfor two hydrostatic water-lubricated journal bearings usedto support a rigid rotor considering the translational andtilting motion The bulk turbulent flow model and FDMmethod is used to numerically predict the performance of the
bearingsThe results show that the proposedwater-lubricatedhydrostatic bearing has the potential to fulfill the target oflower power loss temperature rise and larger load capacityat high speed On the basis of the results presented thefollowing conclusions can be drawn
(1) For a small tilting ratio (lt04) the influence of tiltingratio on the static and dynamic characteristics of awater-lubricated hydrostatic journal bearing is rela-tively small however when the tilting ratio continues
Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 15
to increase the power loss and temperature riseincrease gradually while the quality decreases andthe effect of tilting ratio on the dynamic coefficientsshould be taken into consideration
(2) The quality of the bearings is relatively insensitiveto the rotary speed however the power loss andtemperature rise increase sharply with the rotaryspeed in an aligned condition The direct stiffnesscoefficients vary significantly with the rotary speeddue to the hydrodynamic effect while the dampingcoefficients are almost constant
(3) For a relatively smaller eccentric condition (le01) thestatic and dynamic characteristics of the hydrostaticwater-lubricated journal bearings vary slightly witheccentricity ratio However for a larger eccentriccondition the dynamic characteristics increase ordecrease significantly with the eccentricity ratio
Nomenclature
119888 Design film thickness1198890 Orifice diameter
ℎ Film thickness1198971 Distance between the mass center and
front journal bearing center1198972 Distance between the mass center and rear
journal bearing center1198971198981 Distance between the mass center and theleft edge of front journal bearing
1198971198982 Distance between the mass center and theright edge of rear journal bearing
119903 Radius of the bearing119863 Diameter of a journal bearing119865 The bearing force119871 The length of a journal bearing119875119904 Supply pressure
119882 The external loadΩ Rotary speed120572 Flow coefficient120588 Density120583 Viscosity120582 Orifice design coefficient
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Liu B Lin and X F Zhang ldquoNumerical design method forwater-lubricated hybrid sliding bearingsrdquo International Journalof Precision Engineering andManufacturing vol 9 no 1 pp 47ndash50 2008
[2] X Y Yuan G Y Zhang B Li and X Miao ldquoTheoreticaland experimental results of water-lubricated high-speed short-capillary-compensated hybrid journal bearingsrdquo in Proceedingsof IJTC STLEASME International Joint Tribology Conferencepp 391ndash398 San Antonio Tex USA October 2006
[3] S Yoshimoto T Kume and T Shitara ldquoAxial load capacityof water-lubricated hydrostatic conical bearings with spiralgrooves for high speed spindlesrdquoTribology International vol 31no 6 pp 331ndash338 1998
[4] G Y Gao ZW Yin D Jiang et al ldquoNumerical analysis of plainjournal bearing under hydrodynamic lubrication by waterrdquoTribology International vol 75 pp 31ndash38 2014
[5] S Nakano T Kishibe T Inoue and H Shiraiwa ldquoAn advancedmicroturbine system with water-lubricated bearingsrdquo Interna-tional Journal of Rotating Machinery vol 2009 Article ID718107 12 pages 2009
[6] H H Feng ldquoDynamic characteristics of a rigid spindle sup-ported by water-lubricated bearingsrdquo Applied Mechanics andMaterials vol 401ndash403 pp 121ndash124 2013
[7] J Corbett R J Almond D J Stephenson and Y B P KwanldquoPorous ceramic water hydrostatic bearings for improved foraccuracy performancerdquo CIRP Annals Manufacturing Technol-ogy vol 47 no 1 pp 467ndash470 1998
[8] O Ebrat Z P Mourelatos N Vlahopoulos and KVaidyanathan ldquoCalculation of journal bearing dynamiccharacteristics including journal misalignment and bearingstructural deformationrdquo Tribology Transactions vol 47 no 1pp 94ndash102 2004
[9] S C Jain S C Sharma and T Nagaraju ldquoMisaligned journaleffects in liquid hydrostatic non-recessed journal bearingsrdquoWear vol 210 no 1-2 pp 67ndash75 1997
[10] S C Sharma V M Phalle and S C Jain ldquoCombined influenceof wear and misalignment of journal on the performanceanalysis of three-lobe three-pocket hybrid journal bearingcompensated with capillary restrictorrdquo Journal of Tribology vol134 no 1 Article ID 011703 2012
[11] GH Jang and JWYoon ldquoDynamic characteristics of a coupledjournal and thrust hydrodynamic bearing in a HDD spindlesystem due to its groove locationrdquo Microsystem Technologiesvol 8 no 4-5 pp 261ndash270 2002
[12] G H Jang and S H Lee ldquoDetermination of the dynamiccoefficients of the coupled journal and thrust bearings by theperturbation methodrdquo Tribology Letters vol 22 no 3 pp 239ndash246 2006
[13] HW Kim G H Jang and S H Lee ldquoComplete determinationof the dynamic coefficients of coupled journal and thrustbearings considering five degrees of freedom for a general rotor-bearing systemrdquo Microsystem Technologies vol 17 no 5ndash7 pp749ndash759 2011
[14] G G Hirs ldquoA bulk-flow theory for turbulence in lubricantfilmsrdquo Journal of Lubrication Technology vol 95 no 2 pp 137ndash146 1973
[15] J Frene M Arghir and V Constantinescu ldquoCombined thin-film and Navier-Stokes analysis in high Reynolds numberlubricationrdquo Tribology International vol 39 no 8 pp 734ndash7472006
[16] R Bassani E Ciulli B Piccigallo M Pirozzi and U StaffilanoldquoHydrostatic lubrication with cryogenic fluidsrdquo Tribology Inter-national vol 39 no 8 pp 827ndash832 2006
[17] L San Andres D Childs and Z Yang ldquoTurbulent-flow hydro-static bearings analysis and experimental resultsrdquo InternationalJournal of Mechanical Sciences vol 37 no 8 pp 815ndash829 1995
[18] M M Khonsari and E R Booser Applied Tribology Wiley-Interscience London UK 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of