research article velocity control for coning motion
TRANSCRIPT
Research ArticleVelocity Control for Coning Motion Missile System Using DirectDiscretization Method
Rui-sheng Sun and Chao Ming
Nanjing University of Science and Technology Nanjing 210094 China
Correspondence should be addressed to Rui-sheng Sun srscom163com
Received 3 September 2015 Accepted 19 November 2015
Academic Editor Jing Na
Copyright copy 2015 R-s Sun and C Ming This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
This paper presents a new coning motion control methodology which takes into account the terminal speed constraint to designthe velocity control system for a missile By using a direct discretization method to transform the optimal control problem intoa nonlinear dynamic programming problem the optimal trajectory and velocity profile are obtained to satisfy the design indexrequirement In order to perform the velocity control a virtualmoving target is proposed for themissile to chase along the optimizedtrajectory Consequently after building velocity control model a velocity control law and control parameters of the coning motionare completed through the dynamic inversion theory The simulation results suggest that the proposed control law has a goodperformance and could be applied to the guidance for the missile with terminal speed control constraint
1 Introduction
Modern warfare demands increasingly high performancerequirements for missile for example reentry warheadcluster bombs and rocket-assisted torpedo It needs not onlyhigh guidance precision but also desired velocity in terminalphase The reason for this is threefold The first one is theconceptual requirement in terminal phase For instance arocket-assisted torpedo should fly not too fast to guaranteethat the matrix and the subtorpedo can separate securelyThesecond is the requirement of the large launch window andlarge envelope For a missile system it should not only get aslarge range as possible but also hit the enough short-rangetargets which requires the missile to consume superfluouskinetic energy in a timely manner The third is to ensurethe performance of control system For example the radarsignals can fail in transfer due to the high-speed motion ofradar-guided missile which makes reentry warhead surfacebe surrounded by a serious aerodynamic heating of plasmaConsequently it is necessary to control the deceleration ofthe missile flight speed in a proper time which has become afocus for researchers
Generally speaking there are three kinds of approaches tocontrol the velocity of missile when flying in the air Firstlywe can control the velocity by changing the thrust forcemagnitude Enomoto et al [1] introduced a velocity controlsystem for a leader-following UAV through changing thethrust forcemagnitude and using the dynamic inversion withthe two-time scale approach However this control approachcan only be suitable for the missile with propulsion systemstill on
Secondly according to the flight status and the terminalvelocity constraint the missile velocity can be governedby using the trajectory optimization method By using thisapproach the flight velocity is controlled by changing theflight height profile of the missile which can change its dragforce due to its changing dynamic pressure In [2] a definedproblem of optimal control was transformed into a two-point boundary problem through applying the Pontryaginminimum principle In this work the optimal control andthe optimal trajectory corresponding to this control at a skipthree-dimensional entry of space vehicle into the planetaryatmosphere were determined related to the obtaining of
Hindawi Publishing CorporationDiscrete Dynamics in Nature and SocietyVolume 2015 Article ID 716547 10 pageshttpdxdoiorg1011552015716547
2 Discrete Dynamics in Nature and Society
the maximum terminal velocity Saraf et al [3] presentedan entry control algorithm for future space transportationvehicles through tracking the reference drag acceleration andheading angle profiles so as to satisfy all entry constraintsincluding flight velocity control Bruyere et al [4 5] designeda sideslip velocity autopilot for a model of tactical missile inorder to meet the requirements of sideslip velocity over fullflight envelope
Finally the missile velocity can be controlled by means ofthe coning motion method It is a type of control techniquethat the missile axis movement is tapered at a fixed angleof rotation around the velocity vector which will produce avelocity-centered conical surface a coning motion [6] thatcan make the missile increase induced drag in order to adjustthe flight velocity through producing induced angle of attackObviously the coningmotion control is an effective approachto control the flight velocity of missile [7ndash9] Song [10]presented a new velocity control method of coning motionthrough simulating the reentry to improve flight controlaccuracy and control robustness of the terminal speed ofthe reentry vehicle when antidesigning the speed controlmethod for Pershing II Reference [11] put forward a velocitymagnitude control program which separates decelerationmotion into two different forms in the capability range ofwarhead guidance and control systems in order to meetthe requirement of fall velocity of a reentry maneuveringwarhead and to avoid designing a complicated ideal velocitycurve In the field of noncontrolled rocket Mao et aldid some work for the coning motion on the producingmechanism [12] motion characteristics and stability analysismethods [8 13] optimal control [14] and the approach ofreducing and avoiding coning motion [15]
Consequently in order to design the velocity controlsystem for a missile with the constraint of the terminalvelocity a deep understanding of the interaction among flightmechanics optimizations and control is necessary The aimof this research is to propose a design methodology for thevelocity control system by utilizing the coning motion basedon a direct discretization and dynamic inversion methodThe remaining of this paper is organized as follows Section 2describes the problem formulation and design scheme forvelocity control In Section 3 a direct discretization methodis deduced to develop the standard trajectory optimizationand the velocity control profile and the velocity controlmethodology is presented in detail through the coningmotion technique Moreover the structure and parameterdesign of velocity controller are explored for a coningmotionmissile In Section 4 a simulation case is demonstrated togovern the terminal velocity of the missile through using theconing motion algorithm In order to illustrate the velocitycontrol performance a traditional control method is alsocarried out for comparative study Finally some conclusionsare presented in Section 5
2 Problem Formulation
21 Motion Equations For the optimal flight velocity controlproblem under consideration a mathematical model based
on point mass dynamics can be used for determining thetrajectory and velocity yielding
119898119872
= minus119863 minus 119898119892 sin 120579
119898119881119872
120579 = 119871 cos 120574
119881minus 119885 sin 120574
119881minus 119898119892 cos 120579
minus119898119881119872cos 120579
119881= 119884 sin 120574
119881+ 119885 cos 120574
119881
119872
= 119881119872cos 120579 cos120595
119881
119910119872
= 119881119872sin 120579
119872
= minus119881119872sin 120579 sin120595
119881
(1)
where 119881119872 120579 Ψ119881 and 120574
119881denote velocity trajectory inclina-
tion angle path angle and bank angle of missile respectively119909119872 119910119872 and 119911
119872represent distance along 119909- 119910- 119911-axis and
119898 and 119892 are mass of missile and acceleration of gravityseparately
Here the earth is assumed to be flat and themodel for thedrag (119863) the lift (119871) and the side force (119885) can be formulatedas
119863 = 119902119878119862119863
119871 = 119902119878119862119871
119885 = 119902119878119862119911
(2)
where 119902 is dynamic pressure and 119878 is reference area Herethe coefficients of aerodynamics 119862
119863 119862119871 and 119862
119885are usually
obtained by CFD or wind tunnel test
22 Cost Function The performance index used for mini-mization of missile miss-distance and control is
119869 = 119909 (119905119891)
2
+ int
119905119891
1199050
120572 (119905)2 d119905 (3)
where 119905 denotes flight time and 120572 is angle of attack (AOA)Here subscript 0 and 119891 represent initial and terminal timerespectively
23 Flight Path Constraints The constraints correspondingto the flight path optimization for a given missile are asfollows
The constraints on states and parameters control are
119910 isin [119910lower 119910upper]
120579 isin [120579lower 120579upper] (4)
where the subscript lower and upper represent lower andupper limit respectively
These numbers are completely based on the flight enve-lope characteristics representing the possible values for themaximum and minimum state variables
The terminal constraints of the missile are
119881(119905119891) le 119881119891
120579 (119905119891) ge 120579119891
(5)
Discrete Dynamics in Nature and Society 3
Optimizetrajectory andvelocity profile
Proposea virtual moving
target
Model velocitycontrol and conduct
control law
Integration design forvelocity and
trajectory control
Figure 1 The process of the velocity control system design
Similarly the nonlinear state inequality constraints are
120572lower le 120572 (119905) le 120572upper
119886119910lower le 119886
119910 (119905) le 119886
119910upper(6)
For the purpose of the velocity control design twosubproblems are imperative to be solved One is to obtain theoptimal trajectory in the ideal condition In consideration ofthis subproblem the flight performance should be optimizedto produce the trajectory and velocity profile satisfying theabove requirements The other one is to control the missileflying path along the optimal trajectory in the same timeto ensure the coherence of the missile speed and the idealvelocity profile that is the integration of the trajectory andvelocity control should be considered
3 Velocity Control System Design
Theprocess of the velocity control systemdesign is conductedin Figure 1 Primarily the optimal trajectory and velocityprofile are carried out as a criterion for meeting the indexrequirementsThen in order to perform this velocity controla virtual moving target moving along the critical trajectoryis applied to guide the missile In terms of this the velocitycontrol schematic and model can be built and the velocitycontrol law and control parameters will be implementedincluding the integration design for velocity control andtrajectory control for a good performance of the coningmotion missile system
31 Trajectory and Velocity Profile Optimization With theadvent of computers and evolution of modern theories ofoptimal control the numerical computation techniques foroptimal atmospheric trajectories have been an active researcharea since the early 1970s The approaches on trajectory opti-mization are of two distinct categories such as direct methodbased on the mathematical programming and parameteriza-tion of state and control histories and the indirect methodgrounded on the solution of two-point boundary valueproblem (TPBVP) using optimal control principle [16ndash18]Because the guess of the initial values of costate variablesis random and there is a lack of physical implication theTPBVP is difficult to solve especially when the optimalsystem is accompanied with high nonlinearity and multipleconstraints (eg nonlinear trajectory optimization problem)The direct method has better convergence properties andthus can perform well with a poor initial guess [17] Fromthe mathematical point of view the KKT conditions of NLPtransformed by a discretization are equivalent to first-ordernecessary conditions of the original optimal control problemwhich means the solution of the NLP is equivalent to that ofthe original optimal control problem
Therefore the direct method is derived for the trajec-tory and the velocity profile optimization of the missileFurthermore the hp-adaptive Pseudospectral Method asa kind of efficient direct method is combining LegendrePseudospectral Method [19 20] and hp-adaptive method[21] which discretizes the state variables and control vari-ables on a series of Legendre-Gauss-Lobatto (LGL) pointsThrough constructing a Lagrange interpolation polynomialto approach the state variables and the control variables bytaking these discrete points as nodes the optimal controlproblem is transformed into a nonlinear dynamic program-ming problemThen the constraints of differential equationscan be altered into the form of algebra equations and sodo the integration item and the terminal status of the costfunction namely they can be calculated by using Gauss-Lobatto integration and integrating the right function frominitial status respectively When the calculation precisionduring some intervals fails to meet the requirement the col-location numbers and order number of global interpolationpolynomial should be adjusted adaptively in accordance withthe hp-adaptive method
Generally the discretization for the trajectory is con-ducted as follows For transforming flight time [119905
0 119905119891] into the
formof Legendre PseudospectralMethod [minus1 1] the variable119905 is converted to
120591 =
2119905
(119905119891minus 1199050)
minus
(119905119891+ 1199050)
(119905119891minus 1199050)
(7)
If 119870 is for the collocation numbers the state vector andcontrol vector will be approximately described by119870 Lagrangepolynomials 119871
119894(120591) considered as basis functions that is
x (120591) asymp X (120591) =
119870
sum
119894=1
L119894 (120591)X (120591
119894)
u (120591) asymp U (120591) =
119870
sum
119894=1
L119894 (120591)U (120591
119894)
(8)
where state vector x = [119881119872
120579 120595119881119909119872
119910119872
119911119872] and control
vector u = [120572]Derive (7) and the approximate derivation of state vector
is
x (120591119896) asymp X (120591
119896) =
119870
sum
119894=1
L119894(120591119896)X (120591119894) (9)
The constraint of dynamics equations thus is converted tothe form of algebra constraint that is
119870
sum
119894=1
D119896119894X (120591119894) minus
119905119891minus 1199050
2
119891 (X (120591119896)) = 0 (10)
4 Discrete Dynamics in Nature and Society
Solve NLP
No
Yes
No
Calculate costfunction J
Updatecontrolvariable
Calculate ratio of maximumcurvature to average curvature r
YesNo
Generatenew mesh
Solutionmeets errortolerance
Update numberof collocation
points in mesh
Transcribe trajectoryoptimization into NLP
Yes
Quit
Start
Update orderof interpolating
polynomial
Compute LGR pointsweights
and differentiation matrices
UntranscribeNLP
solution todiscreteoptimalcontrol
problem
Is Jminimum
Updateparameters
r lt rmax
Figure 2 Schematic of hp-adaptive pseudospectral algorithm to solve optimal control problem
whereD119896119894= L119894(120591119896)means differentiation matrix of Legendre
Pseudospectral MethodIn terms of the above process of discretization the
interior-point method is applied to deal with the boundedconstraints of the inequality such as (4) (5) and (6) thatis a barrier term 120583 is brought in to the objective functionfor completely avoiding this problem of bound constraintsFortunately C++ software pack (Ipopt) [22] of the interior-point method can be utilized to solve this discrete nonlinearprogramming (NLP) A design philosophy is described toenable the optimal generic design by using the hp-adaptivePseudospectral Method outlined briefly in Figure 2 Thenthe schematic of algorithm to solve optimal control problemcan be described as follows
(1) Initialize a new mesh grid
(2) Discretize the continuous optimization control prob-lem through the Legendre Pseudospectral Method
and transform it into NLP problem through com-puting LGR points (X(120591
119894)U(120591119894)) weights L
119894(120591) and
differentiation matricesD119896
(3) Solve the NLP problem by using the interior-pointmethod
(4) Update control variable and go back to Step (3) if theindex 119869 of cost function is not minimized
(5) Quit the optimization process otherwise updateparameters and go back to Step (2) if the solution ofstate and path constraints meets error tolerance
32 Trajectory Control by Tracking Virtual Moving TargetAfter obtaining the standard optimization trajectory andvelocity control profile the task shifts to pursuit of a designto make the missile fly along the ideal trajectory as well asthe velocity profileThe conventional guidancemethod of theshaped trajectory can ensure the performance of the precisionto the fixed target which does not consider the requirement
Discrete Dynamics in Nature and Society 5
(xT0 yT0)
VT0
T
M
A
O
VT
VM
xT y
xVTflowast
Figure 3 Kinematical relationship of the missile and the virtualtarget
of the velocity control Therefore a virtual target proposedhere is to afford a possibility of velocity control for themissileConcretely a virtual target is designed tomove exactly like theideal movement of the missile that is to move strictly alongthe standard optimized trajectory 1006704AOwith the same speed tothe velocity profile If a control design is developed to makethe missile precisely chase the virtual target the requirementof the velocity will be naturally satisfied for the missile flyingalong the ideal trajectory Thus in terms of the longitudinalplane of the kinematics described in Figure 3 all parametersof the position (119909
119879 119910119879) and velocity 119881
119879including initial
position (1199091198790 1199101198790) ideal initial velocity 119881
1198790 and anticipant
terminal velocity 119881119879119891lowast can be obtained from the information
of the optimized trajectory
33 Velocity Control Methodology Figure 4 depicts the totalcontrol flow of the coning motion control It is known thatthe desired initial velocity119881
1198720lowast (start from point A shown in
Figure 3) can be conducted by using the above hp-adaptivepseudospectral trajectory optimization method for decidingwhether the coning motion is need Besides in considerationof the influence of the control dynamics to the velocity theconing motion will be made to descent of the flight velocitywhen real velocity 119881
1198720is more than 11 119881
1198720lowast
Obviously the relative velocity and distance between themissile and the virtual target can be written as Δ119881 = 119881
119872minus119881119879
and Δ119877 = 119877119879minus 119877119872 respectively Here let Δ119877 be larger
than zero when the target moves in front of the missile Ifthe missile motion satisfies the condition of Δ119877 gt 0 or119881119872
lt 119881119879 the terminal velocity will surely meet the index
constraint Thus the velocity control system can be built upin accordance with the relationship of the relative distanceand speed between the missile and the virtual target (seeFigure 5) Then the velocity control law can be formulatedas
119886119909119888
= 119891 (Δ119881 Δ119877) = 119870119877(Δ119877 minus Δ119877
119905) + 119870119881(119881119879minus 119881119872) (11)
where Δ119877119905is the desired distance between the missile and
the virtual target and 119870119877and 119870
119881denote the velocity control
gainsFor the sake of convenience of analysis it is good to
suppose the anticipant distance between the missile and
NoSuspend coning motion
Restart coning motionGuidance withconing motion
Yes
Proportionalguidance
No
Start
No Coning motionend
Need decelerationMissilemotion
Yes
Yes
Δayc Δazc
ayc azc
Proportionalguidance
VM0 gt 11 middot VM0lowast
VM gt VTlowast
Figure 4 Control flow chart of the coning motion control
1
s
1
s
+
+
+
minus
minus
VTKV
KR
ΔR ΔRt
VM
axc
Figure 5 Velocity control structure of the missile
the virtual target to be 0 that isΔ119877119905= 0Therefore the veloc-
ity control law will be simplified as
119891 (Δ119881 Δ119877) = 119870119877Δ119877 + 119870
119881Δ119881 (12)
If the missile overlaps at the position of virtual targetfor example 119891(Δ119881 Δ119877) = 0 Δ119881 = 0 Δ119877 = 0 theindex of terminal velocity is satisfied naturally Moreover if119891(Δ119881 Δ119877) lt 0 there are two circumstances (1) the missilemoves in back of the virtual target and (2) the missile is infront of the virtual target but the speedmagnitude is less thanthat of virtual target Since the virtual target moves along theideal flight trajectory all over the circumstances of (1) and(2) will both satisfy the terminal velocity index Additionallythe kinetic energy of the missile is unnecessarily large when119891(Δ119881 Δ119877) gt 0 which will result in the missile decelerationby coning motion
Consequently the cost function 119891(Δ119881 Δ119877) determineswhether the velocity control is required For example if119891(Δ119881 Δ119877) is less than zero the missile coningmotion shouldbe paused and the proportional navigation guidance to
6 Discrete Dynamics in Nature and Society
the target should be switched on as well Otherwise if119891(Δ119881 Δ119877) is greater than zero the coning motion will berestarted
According to the control structure of themissile dynamicinversion theory [23] can be used to design the controlparameters 119870
119877and 119870
119881 The equation related to the velocity
shown in Figure 3 is expressed as
119898119872
= minus119902119878119862119909minus 119898119892 sin 120579 (13)
Replacing 119872with 119886
119909119888gives
119886119909119888
=
minus119902119878119862119909
119898
minus 119892 sin 120579 (14)
From the velocity control structure outlined in Figure 4transfer function 119881
119879to 119881119872becomes
119882(119904) =
119881119872 (119904)
119881119879 (
119904)
=
119870119881119904 + 119870119877
1199042+ 119870119881119904 + 119870119877
(15)
where the 2nd-order characteristic equation is
1199042+ 119870119881119904 + 119870119877= 0 (16)
Control gains 119870119881and 119870
119877are determined such that 119881
119872
may become its desiring velocity 119881119879 Apparently from the
linear system theory the stability of the system is ascertainedby the pole points and the system is stable only when all polepoints are located at the left of 119904 plane
(1) If 1198702119881
ge 4119870119877 since 119870
119881and 119870
119877are both over zero
the two characteristic roots of the system will be bothminus real numbers which can be written as
11990412
=
minus119870119881plusmn radic119870
2
119881minus 4119870119877
2
(17)
(2) If 1198702119881lt 4119870119877 11990412
changes to
11990412
=
minus119870119881plusmn 119894radic4119870
119877minus 1198702
119881
2
(18)
Apparently the nearer pole to the imaginary axis pri-marily determines the speed of output response of the abovesystem Therefore if the poles 119904
12have the same minus real
part that is when 1198702
119881le 4119870
119877 it is possible to obtain the
fastest output response Synchronously the imaginary partof the characteristic roots determines the magnitude of theovershoot In general the relative damping value of system isoptimally set toradic22 and then the equation
radic4119870119877minus 1198702
119881
119870119881
=
radic2
2
(19)
gives
119870119877=
3
8
1198702
119881 (20)
Let 119881119879(119904) = 1119904 substituting it into transfer function (15)
yields
119881119872 (119904) =
1
119904
sdot
119870119881119904 + 119870119877
1199042+ 119870119881119904 + 119870119877
=
1
119904
minus
1
119904 + 05119870119881
+
05119870119881
(119904 + 05119870119881)2
(21)
which can be described in the time-domain form by applyingLaplace inverse transform that is
119881119872 (119905) = 1 + 119890
minus05119870119881sdot119905(05119870
119881sdot 119905 minus 1) (22)
Besides by differentiating (22) it becomes
dd119905119881119872 (119905) =
1
2
119870119881119890minus(12)119870119881sdot119905
(2 minus
1
2
119870119881119905) (23)
Let (dd119905)119881119872(119905) = 0 and the settling time of the system can
be given as
119879119901=
4
119870119881
(24)
In order to ensure the performance of the system thesettling time 119879
119901is generally set to the triple of the time
constant of the missile 119879119889 namely
119879119901= 3119879119889 (25)
By combining (20) (24) and (25) the solution to thevelocity control law is
119870119881=
4
3119879119889
119870119877=
3
8
1198702
119881
(26)
When the missile does pure coning motion the acceler-ation commands in longitudinal and lateral plane 119886
120575119910119888and
119886120575119911119888
are
119886120575119910119888
= 119886120575sin120596119905
119886120575119911119888
= 119886120575cos120596119905
(27)
where 120596 represents a circular frequency and 119886120575is the accel-
eration command corresponding to command of AOA 120575 incondition of the pure coning motion
In accordance with the velocity control law shown in (12)drag force command119883
119888can be acquired as
minus119883119888= 119898119886119909119888+ 119898119892 sin 120579 (28)
which gives the lift force command
119884119888= 119901119883119888= 119901 sdot (119898119886
119909119888+ 119898119892 sin 120579) (29)
where 119901means lift-drag ratio So
119886120575=
119884119888
119898
=
119901119883119888
119898
=
119901 sdot (119898119886119909119888+ 119898119892 sin 120579)119898
asymp 119901 (119870119881Δ119881 + 119870
119877Δ119877)
(30)
Discrete Dynamics in Nature and Society 7
34 Integrated Design for Velocity Control and TrajectoryControl On the other hand in order to make the missile hitthe target precisely it is necessary to design an appropriatecontrol law under which the normal acceleration 119886
119898can be
formulated with the relative motion between the missile andthe target as follows
119886119898= 119891 (119903 120585) (31)
where 119903 denotes directive distance betweenmissile and targetand 120585 is angle of line-of-sight (LOS)
Traditional control laws are determined to approach theconvergence of the distance and the LOS rate between themissile and the target For instance in terms of classicproportional navigation (PN) method it is concluded thatmissile acceleration commands 119886
119898are in proportion to the
rate of LOS 120585
From (27) the integrated guidance commands can bewritten as follows
119886119910119888
= Δ119886119910119888+ 119886120575sin120596119905
119886119911119888= Δ119886119911119888+ 119886120575cos120596119905
(32)
where Δ119886119910119888
and Δ119886119911119888
denote the normal PN commands inlongitudinal and lateral plane respectively
As given in (32) if the velocity meets the anticipantrequirement that is 119886
120575= 0 the missile will stop coning
motion andwill fly through the proportion guidance law so asto hit the target accurately Otherwise the missile will do theconingmotion whichmakes a continuous alternate changingbetween the angle of attack 120575 sin120596119905 and sideslip angle120575 cos120596119905 respectively In an alternating cycle the equivalentlift force produced by the alternate AOA is equal to zero andthe same to the side force That is to say only the drag forceincreases during the period of coning motion
Additionally consistent with the normal control com-mands Δ119886
119910119888and Δ119886
119911119888 the total AOA of the missile can be
given as
Δ = radic1205722+ 1205732
= radic(Δ120572 + 120575 sin120596119905)2 + (Δ120573 + 120575 cos120596119905)2
= radicΔ1205722+ Δ1205732+ ℎ (120575 Δ120572 Δ120573) + 120575
2
(33)
where 120573 represents sideslip angle and ℎ(120575 Δ120572 Δ120573) =
2120575(Δ120572 sin120596119905 + Δ120573 cos120596119905)From (33) if the missile flies without coning motion that
is 120575 = 0 the total AOA will be simplified as
Δ = radicΔ1205722+ Δ1205732 (34)
Since ℎ(120575 Δ120572 Δ120573) changes periodically with time asshown in (33) it is possible that the missile with coningmotion produces less total AOA than that without coningmotion when the item ℎ(120575 Δ120572 Δ120573) + 120575
2lt 0 That is to
say coning motion control results in the missilersquos dragdecrease especially when the weight of the missile gravity
in the direction of the velocity is over the drag force that isminus119902119878119862119909minus 119898119892 sin 120579 gt 0 and it is concluded that the speed of
the missile will increase and not decrease Consequently toprevent this from happening the inequation can be supposedas
Δ120572 sin120596119905 + Δ120573 cos120596119905 gt 0 (35)
which gives
radicΔ1205722+ Δ1205732 sin (120596119905 + 120596
0) gt 0 (36)
where 1205960is equal to acos(Δ120572radicΔ120572
2+ Δ1205732)
In order to meet inequation (36) all along circularfrequency 120596 should satisfy
2120587119899 le 120596119905 + 1205960le 2120587119899 + 120587 119899 isin 119864 (37)
So2120587119899 minus 120596
0
119905
le 120596 le
2120587119899 + 120587 minus 1205960
119905
(38)
In view of the dynamic characteristics of the missile andthe performance of the actuator the bandwidth of the coiningmotion command must be less than that of the actuatorOtherwise it is difficult for the missile guidance system totrack the guidance commandThus the angular ratio 120596mustbe subject to 120596 lt 120596
119879 that is
2120587119899 + 120587 minus 1205960
119905
lt 120596119879
119899 = Round [120596119879119905 minus 120587 + 120596
0
2120587
] (39)
where 120596119879represents the bandwidth of the system
4 Simulation Example
In this section a simulation example of the velocity controlsystem by using coning motion technique is demonstratedfor a missile whose indexes include terminal speed terminalpath angle and miss distance In order to exhibit the velocitycontrol performance the conventional PN mode withoutthe coning motion and particle swarm optimization (PSO)approach are involved for comparing studyThe initial condi-tions that the missile makes coning motion are set as followsthe initial values of 119910 120579 119881 and Ψ
119881are set to be 119909(0) =
minus19 km 119910(0) = 10 km 120579(0) = minus20 deg 119881(0) = 500msand Ψ
119881(0) = 0 deg The initial position of the virtual target is
selected as (minus7292 9329 0)m besides the total flight time 119905119879
638 s The flight constraints are set as 120579low = minus30∘ 120579top = 30
∘119910low = 0 km 119910top = 10 km119881
119891= 250ms 120579
119891= minus25
∘ 120572down =minus20 deg 120572up = 20 deg 119886
119910down = minus50ms2 and 119886119910up = 50m
s2 Additionally the design process of PSO trajectory isreferred to [24] and the parameters of the adopted PSOmethod are 119898 = 50 119899 = 2 and 119888
1= 1198882= 18 Inertial weight
119908 is set to be reduced linearly from 10 to 04 and the searchwill be terminated if the fitness value is less than 04 or thenumber of iteration reaches 150
According to the above integrated design method forvelocity control and trajectory control the simulation results
8 Discrete Dynamics in Nature and Society
Table 1 Simulation results produced by different guidance laws
Guidance withvelocity control
Guidance withoutvelocity control
Optimizationtrajectory profile PSO trajectory profile
Final velocity (ms) 25409 28136 2550 2556Final flying path angle (deg) minus1565 minus2018 minus2146 minus2093Miss distance (m) 22 16 06 08
minus20minus15
minus10minus50
minus1minus05
005
1
0
2
4
6
8
10
x (km)
y(k
m)
z (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 6 3D curve of the flight trajectories with different modes
020
4060
80
minus10minus5
05
1015
minus10
minus5
0
5
10
15
B
A
Optimal trajectoryPSO trajectory
PN modeConing motion mode
t (s)
120572(d
eg)
120573 (deg)
Figure 7 History curve of the coning motion
are illustrated in Figures 6ndash13 Comparing the results of theoptimalmethod proposed in this paper with those of the PSOapproach it is concluded that the optimization solutions oftwo approaches are almost the same which implies the pre-sented direct discretizationmethod has sufficient precision ofoptimization stratifying the requirements of the constraintsas exhibited in Table 1
Additionally as the result shown in Figure 6 the velocitycontrol system has got the same normal control performance
minus15 minus10 minus5 0 5 10 15
minus10
minus5
0
5
10
A
B
120572(d
eg)
120573 (deg)
StartEnd
Figure 8 Variation of the nutation angle
minus20 minus15 minus10 minus5 0250
300
350
400
450
500
550
600
(m
s)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 9 Response of the velocity in different condition
to the conventional proportional navigation scheme FromFigures 7-8 where points A and B denote the start andend of the coning motion respectively the control systemimproves the magnitude amount of induced AOA whichmakes the missilersquos drag increase Therefore the speed of themissile decreases apparently in this period as illustrated in
Discrete Dynamics in Nature and Society 9
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120572(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 10 Variation of the angle of attack
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120573(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 11 Variation of the sideslip angle
Figure 9 Meanwhile Figures 10-11 indicate that the coningmotion control suspends at the range of 13 km and switchesinto the pure proportion guidance mode which suggeststhat the missile velocity is gradually moving to the indexof requirement because the magnitudes of the attack andsideslip angles are both getting smaller with the missileapproaching to the virtual target According to the path anglecurves outlined in Figures 12-13 it is helpful to suspendthe coning motion control before hitting the target becausethe coning motion reduces the tracking precision to theideal trajectory Finally as shown in Table 1 both guidancemodes meet the requirements of high guidance precision andterminal path angle but the coning motion control systemproduces lower amount of terminal velocity which is in linewith the desired velocity index
minus20 minus15 minus10 minus5 0minus40
minus35
minus30
minus25
minus20
minus15
minus10
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
120579(d
eg)
Figure 12 Curve of the trajectory inclination angle
minus20 minus15 minus10 minus5 0minus3
minus2
minus1
0
1
2
3
4
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
ΨV
(deg
)
Figure 13 Curve of the path angle versus range
5 Conclusions
In this paper a novel coning motion based guidance methodis proposed for the velocity control of missile system withterminal velocity constraint An ideal velocity profile is pre-sented by using nonlinear programming method in which avirtual moving target is put forward for missile to chase soas to perform the velocity control Moreover the dynamicinversion theory is applied to design the velocity controlsystem parameters To show the effectiveness of the controllaw comparative simulations of a missile in which pureproportional navigation mode has been taken into consid-eration are provided Simulation results demonstrate thatthe proposed velocity control law has a good performanceproviding reference to the design for velocity control system
10 Discrete Dynamics in Nature and Society
of the missileThe extensions of the presented coningmotioncontrol laws to a spinning missile and the inclusion of thedynamics in the velocity control system are possible areas offurther research
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Natural Science Founda-tion of China (NSFC) under Grant no 11176012 and theResearch Innovation Project for Graduate Student of Jiangsu-Provincial Ordinary University under Grant no KLYX15-0394
References
[1] K Enomoto T Yamasakiy H Taknoz and Y Baba ldquoA study ona velocity control system design using the dynamic inversionmethodrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference AIAA 2010-8204 Toronto Canada August2010
[2] V Istratie ldquoThree-dimensional optimal skip entrywith terminalmaximum velocityrdquo in Proceedings of the 22nd AtmosphericFlight Mechanics Conference AIAA 97-3483 New Orleans LaUSA August 1997
[3] A Saraf J A Leavitt D T Chen and K D Mease ldquoDesignand evaluation of an acceleration guidance algorithm for entryrdquoJournal of Spacecraft and Rockets vol 41 no 6 pp 986ndash9962004
[4] L Bruyere ldquoDynamic inversion for missile lateral velocity con-trol via polynomial eigenstructure assignmentrdquo in Proceedingsof the AIAA Guidance Navigation and Control Conference andExhibit Austin Tex USA August 2003
[5] D M Acosta and S S Joshi ldquoAdaptive nonlinear dynamicinversion control of an autonomous airship for the explorationof titanrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Hilton Head Island SC USAAugust 2007
[6] Y-X Jiang and J Cui ldquoEffectiveness of weaving maneuverstrategy of a missilerdquo Journal of Beijing University of Aeronauticsand Astronautics vol 28 no 2 pp 133ndash136 2002
[7] W H Curry and J F Reed ldquoMeasurement of Magnus effectson a sounding rocket model in a supersonic wind tunnelrdquo inProceedings of the Aerodynamic Testing Conference AmericanInstitute of Aeronautics and Astronautics Los Angeles CalifUSA September 1966
[8] X R Mao S X Yang and Y Xu ldquoConing motion stability ofwrap around fin rocketsrdquo Science in China Series E Technologi-cal Sciences vol 50 no 3 pp 343ndash350 2007
[9] J Morote and G Liano ldquoStability analysis and flight trials ofa clipped wrap around fin configurationrdquo in Proceedings ofthe Aiaa Atmospheric Flight Mechanics Conference and ExhibitAAAI 2004-5055 American Institute of Aeronautics andAstro-nautics Providence RI USA August 2004
[10] J Song ldquoA velocity control method of the reentry vehicle basedon flight simulationrdquoMissiles and Space Vehicles no 2 pp 5ndash72012
[11] FWang X Liu J Liang and X Fang ldquoVelocity control methodbased on terminal restraintrdquo Flight Dynamics vol 29 no 6 pp52ndash55 2011
[12] X R Mao S X Yang and Y Xu ldquoResearch on the coningmotion of wrap-around fin projectilesrdquo Canadian Aeronauticsand Space Journal vol 52 no 3 pp 119ndash125 2006
[13] K Y Li L Y Zhao andW Zhou ldquoStability of coning motion ofspinning rocket projectiles at high altituderdquo Journal ofDynamicsand Control vol 10 no 3 pp 239ndash243 2012
[14] X R Mao and S X Yang ldquoOptimal control of coning motionof spinning missilesrdquo Journal of Aerospace Engineering vol 28no 2 Article ID 04014068 pp 1ndash10 2015
[15] H-B Wang and J-S Wu ldquoConing motion of rockets itsnumerical simulation and restraintrdquo Transaction of BeijingInstitute of Technology vol 27 no 3 pp 196ndash199 2007
[16] P K A Menon V H L Cheng C A Lin and M MBriggs ldquoHigh-performance missile synthesis with trajectoryand propulsion system optimizationrdquo Journal of Spacecraft andRockets vol 24 no 6 pp 552ndash557 1987
[17] X-P Bai Y-H Zhao and Y-N Liu ldquoA novel approach tostudy real-time dynamic optimization analysis and simulationcomplex mine logistics transportation hybrid system with beltand surge linksrdquo Discrete Dynamics in Nature and Society vol2015 Article ID 601578 8 pages 2015
[18] J T Betts Practical Methods for Optimal Control Using Nonlin-ear Programming SIAM 1st edition 2001
[19] F Fahroo and I M Ross ldquoCostate estimation by a Legendrepseudospectral methodrdquo Journal of Guidance Control andDynamics vol 24 no 2 pp 270ndash277 2001
[20] M M Khader N H Sweilam and W Y Kota ldquoCardinalfunctions for Legendre pseudo-spectral method for solving theintegro-differential equationsrdquo Journal of the Egyptian Mathe-matical Society vol 22 no 3 pp 511ndash516 2014
[21] C L Darby W W Hager and A V Rao ldquoDirect trajectoryoptimization using a variable low-order adaptive pseudospec-tral methodrdquo Journal of Spacecraft and Rockets vol 48 no 3pp 433ndash445 2011
[22] A Wachter and L T Biegler ldquoOn the implementation ofan interior-point filter line-search algorithm for large-scalenonlinear programmingrdquoMathematical Programming vol 106no 1 pp 25ndash57 2006
[23] L Bruyere B A Whitey and A Tsourdos ldquoDynamic inversionformissile lateral velocity control via polynomial eigenstructureassignmentrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference and Exhibit AIAA 2003-5792 AustinTex USA August 2003
[24] R S Sun C Ming and C J Sun ldquoTrajectory optimizationdesign for morphing wing missilerdquo Journal of Harbin Instituteof Technology vol 22 no 5 pp 48ndash53 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Discrete Dynamics in Nature and Society
the maximum terminal velocity Saraf et al [3] presentedan entry control algorithm for future space transportationvehicles through tracking the reference drag acceleration andheading angle profiles so as to satisfy all entry constraintsincluding flight velocity control Bruyere et al [4 5] designeda sideslip velocity autopilot for a model of tactical missile inorder to meet the requirements of sideslip velocity over fullflight envelope
Finally the missile velocity can be controlled by means ofthe coning motion method It is a type of control techniquethat the missile axis movement is tapered at a fixed angleof rotation around the velocity vector which will produce avelocity-centered conical surface a coning motion [6] thatcan make the missile increase induced drag in order to adjustthe flight velocity through producing induced angle of attackObviously the coningmotion control is an effective approachto control the flight velocity of missile [7ndash9] Song [10]presented a new velocity control method of coning motionthrough simulating the reentry to improve flight controlaccuracy and control robustness of the terminal speed ofthe reentry vehicle when antidesigning the speed controlmethod for Pershing II Reference [11] put forward a velocitymagnitude control program which separates decelerationmotion into two different forms in the capability range ofwarhead guidance and control systems in order to meetthe requirement of fall velocity of a reentry maneuveringwarhead and to avoid designing a complicated ideal velocitycurve In the field of noncontrolled rocket Mao et aldid some work for the coning motion on the producingmechanism [12] motion characteristics and stability analysismethods [8 13] optimal control [14] and the approach ofreducing and avoiding coning motion [15]
Consequently in order to design the velocity controlsystem for a missile with the constraint of the terminalvelocity a deep understanding of the interaction among flightmechanics optimizations and control is necessary The aimof this research is to propose a design methodology for thevelocity control system by utilizing the coning motion basedon a direct discretization and dynamic inversion methodThe remaining of this paper is organized as follows Section 2describes the problem formulation and design scheme forvelocity control In Section 3 a direct discretization methodis deduced to develop the standard trajectory optimizationand the velocity control profile and the velocity controlmethodology is presented in detail through the coningmotion technique Moreover the structure and parameterdesign of velocity controller are explored for a coningmotionmissile In Section 4 a simulation case is demonstrated togovern the terminal velocity of the missile through using theconing motion algorithm In order to illustrate the velocitycontrol performance a traditional control method is alsocarried out for comparative study Finally some conclusionsare presented in Section 5
2 Problem Formulation
21 Motion Equations For the optimal flight velocity controlproblem under consideration a mathematical model based
on point mass dynamics can be used for determining thetrajectory and velocity yielding
119898119872
= minus119863 minus 119898119892 sin 120579
119898119881119872
120579 = 119871 cos 120574
119881minus 119885 sin 120574
119881minus 119898119892 cos 120579
minus119898119881119872cos 120579
119881= 119884 sin 120574
119881+ 119885 cos 120574
119881
119872
= 119881119872cos 120579 cos120595
119881
119910119872
= 119881119872sin 120579
119872
= minus119881119872sin 120579 sin120595
119881
(1)
where 119881119872 120579 Ψ119881 and 120574
119881denote velocity trajectory inclina-
tion angle path angle and bank angle of missile respectively119909119872 119910119872 and 119911
119872represent distance along 119909- 119910- 119911-axis and
119898 and 119892 are mass of missile and acceleration of gravityseparately
Here the earth is assumed to be flat and themodel for thedrag (119863) the lift (119871) and the side force (119885) can be formulatedas
119863 = 119902119878119862119863
119871 = 119902119878119862119871
119885 = 119902119878119862119911
(2)
where 119902 is dynamic pressure and 119878 is reference area Herethe coefficients of aerodynamics 119862
119863 119862119871 and 119862
119885are usually
obtained by CFD or wind tunnel test
22 Cost Function The performance index used for mini-mization of missile miss-distance and control is
119869 = 119909 (119905119891)
2
+ int
119905119891
1199050
120572 (119905)2 d119905 (3)
where 119905 denotes flight time and 120572 is angle of attack (AOA)Here subscript 0 and 119891 represent initial and terminal timerespectively
23 Flight Path Constraints The constraints correspondingto the flight path optimization for a given missile are asfollows
The constraints on states and parameters control are
119910 isin [119910lower 119910upper]
120579 isin [120579lower 120579upper] (4)
where the subscript lower and upper represent lower andupper limit respectively
These numbers are completely based on the flight enve-lope characteristics representing the possible values for themaximum and minimum state variables
The terminal constraints of the missile are
119881(119905119891) le 119881119891
120579 (119905119891) ge 120579119891
(5)
Discrete Dynamics in Nature and Society 3
Optimizetrajectory andvelocity profile
Proposea virtual moving
target
Model velocitycontrol and conduct
control law
Integration design forvelocity and
trajectory control
Figure 1 The process of the velocity control system design
Similarly the nonlinear state inequality constraints are
120572lower le 120572 (119905) le 120572upper
119886119910lower le 119886
119910 (119905) le 119886
119910upper(6)
For the purpose of the velocity control design twosubproblems are imperative to be solved One is to obtain theoptimal trajectory in the ideal condition In consideration ofthis subproblem the flight performance should be optimizedto produce the trajectory and velocity profile satisfying theabove requirements The other one is to control the missileflying path along the optimal trajectory in the same timeto ensure the coherence of the missile speed and the idealvelocity profile that is the integration of the trajectory andvelocity control should be considered
3 Velocity Control System Design
Theprocess of the velocity control systemdesign is conductedin Figure 1 Primarily the optimal trajectory and velocityprofile are carried out as a criterion for meeting the indexrequirementsThen in order to perform this velocity controla virtual moving target moving along the critical trajectoryis applied to guide the missile In terms of this the velocitycontrol schematic and model can be built and the velocitycontrol law and control parameters will be implementedincluding the integration design for velocity control andtrajectory control for a good performance of the coningmotion missile system
31 Trajectory and Velocity Profile Optimization With theadvent of computers and evolution of modern theories ofoptimal control the numerical computation techniques foroptimal atmospheric trajectories have been an active researcharea since the early 1970s The approaches on trajectory opti-mization are of two distinct categories such as direct methodbased on the mathematical programming and parameteriza-tion of state and control histories and the indirect methodgrounded on the solution of two-point boundary valueproblem (TPBVP) using optimal control principle [16ndash18]Because the guess of the initial values of costate variablesis random and there is a lack of physical implication theTPBVP is difficult to solve especially when the optimalsystem is accompanied with high nonlinearity and multipleconstraints (eg nonlinear trajectory optimization problem)The direct method has better convergence properties andthus can perform well with a poor initial guess [17] Fromthe mathematical point of view the KKT conditions of NLPtransformed by a discretization are equivalent to first-ordernecessary conditions of the original optimal control problemwhich means the solution of the NLP is equivalent to that ofthe original optimal control problem
Therefore the direct method is derived for the trajec-tory and the velocity profile optimization of the missileFurthermore the hp-adaptive Pseudospectral Method asa kind of efficient direct method is combining LegendrePseudospectral Method [19 20] and hp-adaptive method[21] which discretizes the state variables and control vari-ables on a series of Legendre-Gauss-Lobatto (LGL) pointsThrough constructing a Lagrange interpolation polynomialto approach the state variables and the control variables bytaking these discrete points as nodes the optimal controlproblem is transformed into a nonlinear dynamic program-ming problemThen the constraints of differential equationscan be altered into the form of algebra equations and sodo the integration item and the terminal status of the costfunction namely they can be calculated by using Gauss-Lobatto integration and integrating the right function frominitial status respectively When the calculation precisionduring some intervals fails to meet the requirement the col-location numbers and order number of global interpolationpolynomial should be adjusted adaptively in accordance withthe hp-adaptive method
Generally the discretization for the trajectory is con-ducted as follows For transforming flight time [119905
0 119905119891] into the
formof Legendre PseudospectralMethod [minus1 1] the variable119905 is converted to
120591 =
2119905
(119905119891minus 1199050)
minus
(119905119891+ 1199050)
(119905119891minus 1199050)
(7)
If 119870 is for the collocation numbers the state vector andcontrol vector will be approximately described by119870 Lagrangepolynomials 119871
119894(120591) considered as basis functions that is
x (120591) asymp X (120591) =
119870
sum
119894=1
L119894 (120591)X (120591
119894)
u (120591) asymp U (120591) =
119870
sum
119894=1
L119894 (120591)U (120591
119894)
(8)
where state vector x = [119881119872
120579 120595119881119909119872
119910119872
119911119872] and control
vector u = [120572]Derive (7) and the approximate derivation of state vector
is
x (120591119896) asymp X (120591
119896) =
119870
sum
119894=1
L119894(120591119896)X (120591119894) (9)
The constraint of dynamics equations thus is converted tothe form of algebra constraint that is
119870
sum
119894=1
D119896119894X (120591119894) minus
119905119891minus 1199050
2
119891 (X (120591119896)) = 0 (10)
4 Discrete Dynamics in Nature and Society
Solve NLP
No
Yes
No
Calculate costfunction J
Updatecontrolvariable
Calculate ratio of maximumcurvature to average curvature r
YesNo
Generatenew mesh
Solutionmeets errortolerance
Update numberof collocation
points in mesh
Transcribe trajectoryoptimization into NLP
Yes
Quit
Start
Update orderof interpolating
polynomial
Compute LGR pointsweights
and differentiation matrices
UntranscribeNLP
solution todiscreteoptimalcontrol
problem
Is Jminimum
Updateparameters
r lt rmax
Figure 2 Schematic of hp-adaptive pseudospectral algorithm to solve optimal control problem
whereD119896119894= L119894(120591119896)means differentiation matrix of Legendre
Pseudospectral MethodIn terms of the above process of discretization the
interior-point method is applied to deal with the boundedconstraints of the inequality such as (4) (5) and (6) thatis a barrier term 120583 is brought in to the objective functionfor completely avoiding this problem of bound constraintsFortunately C++ software pack (Ipopt) [22] of the interior-point method can be utilized to solve this discrete nonlinearprogramming (NLP) A design philosophy is described toenable the optimal generic design by using the hp-adaptivePseudospectral Method outlined briefly in Figure 2 Thenthe schematic of algorithm to solve optimal control problemcan be described as follows
(1) Initialize a new mesh grid
(2) Discretize the continuous optimization control prob-lem through the Legendre Pseudospectral Method
and transform it into NLP problem through com-puting LGR points (X(120591
119894)U(120591119894)) weights L
119894(120591) and
differentiation matricesD119896
(3) Solve the NLP problem by using the interior-pointmethod
(4) Update control variable and go back to Step (3) if theindex 119869 of cost function is not minimized
(5) Quit the optimization process otherwise updateparameters and go back to Step (2) if the solution ofstate and path constraints meets error tolerance
32 Trajectory Control by Tracking Virtual Moving TargetAfter obtaining the standard optimization trajectory andvelocity control profile the task shifts to pursuit of a designto make the missile fly along the ideal trajectory as well asthe velocity profileThe conventional guidancemethod of theshaped trajectory can ensure the performance of the precisionto the fixed target which does not consider the requirement
Discrete Dynamics in Nature and Society 5
(xT0 yT0)
VT0
T
M
A
O
VT
VM
xT y
xVTflowast
Figure 3 Kinematical relationship of the missile and the virtualtarget
of the velocity control Therefore a virtual target proposedhere is to afford a possibility of velocity control for themissileConcretely a virtual target is designed tomove exactly like theideal movement of the missile that is to move strictly alongthe standard optimized trajectory 1006704AOwith the same speed tothe velocity profile If a control design is developed to makethe missile precisely chase the virtual target the requirementof the velocity will be naturally satisfied for the missile flyingalong the ideal trajectory Thus in terms of the longitudinalplane of the kinematics described in Figure 3 all parametersof the position (119909
119879 119910119879) and velocity 119881
119879including initial
position (1199091198790 1199101198790) ideal initial velocity 119881
1198790 and anticipant
terminal velocity 119881119879119891lowast can be obtained from the information
of the optimized trajectory
33 Velocity Control Methodology Figure 4 depicts the totalcontrol flow of the coning motion control It is known thatthe desired initial velocity119881
1198720lowast (start from point A shown in
Figure 3) can be conducted by using the above hp-adaptivepseudospectral trajectory optimization method for decidingwhether the coning motion is need Besides in considerationof the influence of the control dynamics to the velocity theconing motion will be made to descent of the flight velocitywhen real velocity 119881
1198720is more than 11 119881
1198720lowast
Obviously the relative velocity and distance between themissile and the virtual target can be written as Δ119881 = 119881
119872minus119881119879
and Δ119877 = 119877119879minus 119877119872 respectively Here let Δ119877 be larger
than zero when the target moves in front of the missile Ifthe missile motion satisfies the condition of Δ119877 gt 0 or119881119872
lt 119881119879 the terminal velocity will surely meet the index
constraint Thus the velocity control system can be built upin accordance with the relationship of the relative distanceand speed between the missile and the virtual target (seeFigure 5) Then the velocity control law can be formulatedas
119886119909119888
= 119891 (Δ119881 Δ119877) = 119870119877(Δ119877 minus Δ119877
119905) + 119870119881(119881119879minus 119881119872) (11)
where Δ119877119905is the desired distance between the missile and
the virtual target and 119870119877and 119870
119881denote the velocity control
gainsFor the sake of convenience of analysis it is good to
suppose the anticipant distance between the missile and
NoSuspend coning motion
Restart coning motionGuidance withconing motion
Yes
Proportionalguidance
No
Start
No Coning motionend
Need decelerationMissilemotion
Yes
Yes
Δayc Δazc
ayc azc
Proportionalguidance
VM0 gt 11 middot VM0lowast
VM gt VTlowast
Figure 4 Control flow chart of the coning motion control
1
s
1
s
+
+
+
minus
minus
VTKV
KR
ΔR ΔRt
VM
axc
Figure 5 Velocity control structure of the missile
the virtual target to be 0 that isΔ119877119905= 0Therefore the veloc-
ity control law will be simplified as
119891 (Δ119881 Δ119877) = 119870119877Δ119877 + 119870
119881Δ119881 (12)
If the missile overlaps at the position of virtual targetfor example 119891(Δ119881 Δ119877) = 0 Δ119881 = 0 Δ119877 = 0 theindex of terminal velocity is satisfied naturally Moreover if119891(Δ119881 Δ119877) lt 0 there are two circumstances (1) the missilemoves in back of the virtual target and (2) the missile is infront of the virtual target but the speedmagnitude is less thanthat of virtual target Since the virtual target moves along theideal flight trajectory all over the circumstances of (1) and(2) will both satisfy the terminal velocity index Additionallythe kinetic energy of the missile is unnecessarily large when119891(Δ119881 Δ119877) gt 0 which will result in the missile decelerationby coning motion
Consequently the cost function 119891(Δ119881 Δ119877) determineswhether the velocity control is required For example if119891(Δ119881 Δ119877) is less than zero the missile coningmotion shouldbe paused and the proportional navigation guidance to
6 Discrete Dynamics in Nature and Society
the target should be switched on as well Otherwise if119891(Δ119881 Δ119877) is greater than zero the coning motion will berestarted
According to the control structure of themissile dynamicinversion theory [23] can be used to design the controlparameters 119870
119877and 119870
119881 The equation related to the velocity
shown in Figure 3 is expressed as
119898119872
= minus119902119878119862119909minus 119898119892 sin 120579 (13)
Replacing 119872with 119886
119909119888gives
119886119909119888
=
minus119902119878119862119909
119898
minus 119892 sin 120579 (14)
From the velocity control structure outlined in Figure 4transfer function 119881
119879to 119881119872becomes
119882(119904) =
119881119872 (119904)
119881119879 (
119904)
=
119870119881119904 + 119870119877
1199042+ 119870119881119904 + 119870119877
(15)
where the 2nd-order characteristic equation is
1199042+ 119870119881119904 + 119870119877= 0 (16)
Control gains 119870119881and 119870
119877are determined such that 119881
119872
may become its desiring velocity 119881119879 Apparently from the
linear system theory the stability of the system is ascertainedby the pole points and the system is stable only when all polepoints are located at the left of 119904 plane
(1) If 1198702119881
ge 4119870119877 since 119870
119881and 119870
119877are both over zero
the two characteristic roots of the system will be bothminus real numbers which can be written as
11990412
=
minus119870119881plusmn radic119870
2
119881minus 4119870119877
2
(17)
(2) If 1198702119881lt 4119870119877 11990412
changes to
11990412
=
minus119870119881plusmn 119894radic4119870
119877minus 1198702
119881
2
(18)
Apparently the nearer pole to the imaginary axis pri-marily determines the speed of output response of the abovesystem Therefore if the poles 119904
12have the same minus real
part that is when 1198702
119881le 4119870
119877 it is possible to obtain the
fastest output response Synchronously the imaginary partof the characteristic roots determines the magnitude of theovershoot In general the relative damping value of system isoptimally set toradic22 and then the equation
radic4119870119877minus 1198702
119881
119870119881
=
radic2
2
(19)
gives
119870119877=
3
8
1198702
119881 (20)
Let 119881119879(119904) = 1119904 substituting it into transfer function (15)
yields
119881119872 (119904) =
1
119904
sdot
119870119881119904 + 119870119877
1199042+ 119870119881119904 + 119870119877
=
1
119904
minus
1
119904 + 05119870119881
+
05119870119881
(119904 + 05119870119881)2
(21)
which can be described in the time-domain form by applyingLaplace inverse transform that is
119881119872 (119905) = 1 + 119890
minus05119870119881sdot119905(05119870
119881sdot 119905 minus 1) (22)
Besides by differentiating (22) it becomes
dd119905119881119872 (119905) =
1
2
119870119881119890minus(12)119870119881sdot119905
(2 minus
1
2
119870119881119905) (23)
Let (dd119905)119881119872(119905) = 0 and the settling time of the system can
be given as
119879119901=
4
119870119881
(24)
In order to ensure the performance of the system thesettling time 119879
119901is generally set to the triple of the time
constant of the missile 119879119889 namely
119879119901= 3119879119889 (25)
By combining (20) (24) and (25) the solution to thevelocity control law is
119870119881=
4
3119879119889
119870119877=
3
8
1198702
119881
(26)
When the missile does pure coning motion the acceler-ation commands in longitudinal and lateral plane 119886
120575119910119888and
119886120575119911119888
are
119886120575119910119888
= 119886120575sin120596119905
119886120575119911119888
= 119886120575cos120596119905
(27)
where 120596 represents a circular frequency and 119886120575is the accel-
eration command corresponding to command of AOA 120575 incondition of the pure coning motion
In accordance with the velocity control law shown in (12)drag force command119883
119888can be acquired as
minus119883119888= 119898119886119909119888+ 119898119892 sin 120579 (28)
which gives the lift force command
119884119888= 119901119883119888= 119901 sdot (119898119886
119909119888+ 119898119892 sin 120579) (29)
where 119901means lift-drag ratio So
119886120575=
119884119888
119898
=
119901119883119888
119898
=
119901 sdot (119898119886119909119888+ 119898119892 sin 120579)119898
asymp 119901 (119870119881Δ119881 + 119870
119877Δ119877)
(30)
Discrete Dynamics in Nature and Society 7
34 Integrated Design for Velocity Control and TrajectoryControl On the other hand in order to make the missile hitthe target precisely it is necessary to design an appropriatecontrol law under which the normal acceleration 119886
119898can be
formulated with the relative motion between the missile andthe target as follows
119886119898= 119891 (119903 120585) (31)
where 119903 denotes directive distance betweenmissile and targetand 120585 is angle of line-of-sight (LOS)
Traditional control laws are determined to approach theconvergence of the distance and the LOS rate between themissile and the target For instance in terms of classicproportional navigation (PN) method it is concluded thatmissile acceleration commands 119886
119898are in proportion to the
rate of LOS 120585
From (27) the integrated guidance commands can bewritten as follows
119886119910119888
= Δ119886119910119888+ 119886120575sin120596119905
119886119911119888= Δ119886119911119888+ 119886120575cos120596119905
(32)
where Δ119886119910119888
and Δ119886119911119888
denote the normal PN commands inlongitudinal and lateral plane respectively
As given in (32) if the velocity meets the anticipantrequirement that is 119886
120575= 0 the missile will stop coning
motion andwill fly through the proportion guidance law so asto hit the target accurately Otherwise the missile will do theconingmotion whichmakes a continuous alternate changingbetween the angle of attack 120575 sin120596119905 and sideslip angle120575 cos120596119905 respectively In an alternating cycle the equivalentlift force produced by the alternate AOA is equal to zero andthe same to the side force That is to say only the drag forceincreases during the period of coning motion
Additionally consistent with the normal control com-mands Δ119886
119910119888and Δ119886
119911119888 the total AOA of the missile can be
given as
Δ = radic1205722+ 1205732
= radic(Δ120572 + 120575 sin120596119905)2 + (Δ120573 + 120575 cos120596119905)2
= radicΔ1205722+ Δ1205732+ ℎ (120575 Δ120572 Δ120573) + 120575
2
(33)
where 120573 represents sideslip angle and ℎ(120575 Δ120572 Δ120573) =
2120575(Δ120572 sin120596119905 + Δ120573 cos120596119905)From (33) if the missile flies without coning motion that
is 120575 = 0 the total AOA will be simplified as
Δ = radicΔ1205722+ Δ1205732 (34)
Since ℎ(120575 Δ120572 Δ120573) changes periodically with time asshown in (33) it is possible that the missile with coningmotion produces less total AOA than that without coningmotion when the item ℎ(120575 Δ120572 Δ120573) + 120575
2lt 0 That is to
say coning motion control results in the missilersquos dragdecrease especially when the weight of the missile gravity
in the direction of the velocity is over the drag force that isminus119902119878119862119909minus 119898119892 sin 120579 gt 0 and it is concluded that the speed of
the missile will increase and not decrease Consequently toprevent this from happening the inequation can be supposedas
Δ120572 sin120596119905 + Δ120573 cos120596119905 gt 0 (35)
which gives
radicΔ1205722+ Δ1205732 sin (120596119905 + 120596
0) gt 0 (36)
where 1205960is equal to acos(Δ120572radicΔ120572
2+ Δ1205732)
In order to meet inequation (36) all along circularfrequency 120596 should satisfy
2120587119899 le 120596119905 + 1205960le 2120587119899 + 120587 119899 isin 119864 (37)
So2120587119899 minus 120596
0
119905
le 120596 le
2120587119899 + 120587 minus 1205960
119905
(38)
In view of the dynamic characteristics of the missile andthe performance of the actuator the bandwidth of the coiningmotion command must be less than that of the actuatorOtherwise it is difficult for the missile guidance system totrack the guidance commandThus the angular ratio 120596mustbe subject to 120596 lt 120596
119879 that is
2120587119899 + 120587 minus 1205960
119905
lt 120596119879
119899 = Round [120596119879119905 minus 120587 + 120596
0
2120587
] (39)
where 120596119879represents the bandwidth of the system
4 Simulation Example
In this section a simulation example of the velocity controlsystem by using coning motion technique is demonstratedfor a missile whose indexes include terminal speed terminalpath angle and miss distance In order to exhibit the velocitycontrol performance the conventional PN mode withoutthe coning motion and particle swarm optimization (PSO)approach are involved for comparing studyThe initial condi-tions that the missile makes coning motion are set as followsthe initial values of 119910 120579 119881 and Ψ
119881are set to be 119909(0) =
minus19 km 119910(0) = 10 km 120579(0) = minus20 deg 119881(0) = 500msand Ψ
119881(0) = 0 deg The initial position of the virtual target is
selected as (minus7292 9329 0)m besides the total flight time 119905119879
638 s The flight constraints are set as 120579low = minus30∘ 120579top = 30
∘119910low = 0 km 119910top = 10 km119881
119891= 250ms 120579
119891= minus25
∘ 120572down =minus20 deg 120572up = 20 deg 119886
119910down = minus50ms2 and 119886119910up = 50m
s2 Additionally the design process of PSO trajectory isreferred to [24] and the parameters of the adopted PSOmethod are 119898 = 50 119899 = 2 and 119888
1= 1198882= 18 Inertial weight
119908 is set to be reduced linearly from 10 to 04 and the searchwill be terminated if the fitness value is less than 04 or thenumber of iteration reaches 150
According to the above integrated design method forvelocity control and trajectory control the simulation results
8 Discrete Dynamics in Nature and Society
Table 1 Simulation results produced by different guidance laws
Guidance withvelocity control
Guidance withoutvelocity control
Optimizationtrajectory profile PSO trajectory profile
Final velocity (ms) 25409 28136 2550 2556Final flying path angle (deg) minus1565 minus2018 minus2146 minus2093Miss distance (m) 22 16 06 08
minus20minus15
minus10minus50
minus1minus05
005
1
0
2
4
6
8
10
x (km)
y(k
m)
z (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 6 3D curve of the flight trajectories with different modes
020
4060
80
minus10minus5
05
1015
minus10
minus5
0
5
10
15
B
A
Optimal trajectoryPSO trajectory
PN modeConing motion mode
t (s)
120572(d
eg)
120573 (deg)
Figure 7 History curve of the coning motion
are illustrated in Figures 6ndash13 Comparing the results of theoptimalmethod proposed in this paper with those of the PSOapproach it is concluded that the optimization solutions oftwo approaches are almost the same which implies the pre-sented direct discretizationmethod has sufficient precision ofoptimization stratifying the requirements of the constraintsas exhibited in Table 1
Additionally as the result shown in Figure 6 the velocitycontrol system has got the same normal control performance
minus15 minus10 minus5 0 5 10 15
minus10
minus5
0
5
10
A
B
120572(d
eg)
120573 (deg)
StartEnd
Figure 8 Variation of the nutation angle
minus20 minus15 minus10 minus5 0250
300
350
400
450
500
550
600
(m
s)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 9 Response of the velocity in different condition
to the conventional proportional navigation scheme FromFigures 7-8 where points A and B denote the start andend of the coning motion respectively the control systemimproves the magnitude amount of induced AOA whichmakes the missilersquos drag increase Therefore the speed of themissile decreases apparently in this period as illustrated in
Discrete Dynamics in Nature and Society 9
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120572(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 10 Variation of the angle of attack
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120573(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 11 Variation of the sideslip angle
Figure 9 Meanwhile Figures 10-11 indicate that the coningmotion control suspends at the range of 13 km and switchesinto the pure proportion guidance mode which suggeststhat the missile velocity is gradually moving to the indexof requirement because the magnitudes of the attack andsideslip angles are both getting smaller with the missileapproaching to the virtual target According to the path anglecurves outlined in Figures 12-13 it is helpful to suspendthe coning motion control before hitting the target becausethe coning motion reduces the tracking precision to theideal trajectory Finally as shown in Table 1 both guidancemodes meet the requirements of high guidance precision andterminal path angle but the coning motion control systemproduces lower amount of terminal velocity which is in linewith the desired velocity index
minus20 minus15 minus10 minus5 0minus40
minus35
minus30
minus25
minus20
minus15
minus10
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
120579(d
eg)
Figure 12 Curve of the trajectory inclination angle
minus20 minus15 minus10 minus5 0minus3
minus2
minus1
0
1
2
3
4
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
ΨV
(deg
)
Figure 13 Curve of the path angle versus range
5 Conclusions
In this paper a novel coning motion based guidance methodis proposed for the velocity control of missile system withterminal velocity constraint An ideal velocity profile is pre-sented by using nonlinear programming method in which avirtual moving target is put forward for missile to chase soas to perform the velocity control Moreover the dynamicinversion theory is applied to design the velocity controlsystem parameters To show the effectiveness of the controllaw comparative simulations of a missile in which pureproportional navigation mode has been taken into consid-eration are provided Simulation results demonstrate thatthe proposed velocity control law has a good performanceproviding reference to the design for velocity control system
10 Discrete Dynamics in Nature and Society
of the missileThe extensions of the presented coningmotioncontrol laws to a spinning missile and the inclusion of thedynamics in the velocity control system are possible areas offurther research
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Natural Science Founda-tion of China (NSFC) under Grant no 11176012 and theResearch Innovation Project for Graduate Student of Jiangsu-Provincial Ordinary University under Grant no KLYX15-0394
References
[1] K Enomoto T Yamasakiy H Taknoz and Y Baba ldquoA study ona velocity control system design using the dynamic inversionmethodrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference AIAA 2010-8204 Toronto Canada August2010
[2] V Istratie ldquoThree-dimensional optimal skip entrywith terminalmaximum velocityrdquo in Proceedings of the 22nd AtmosphericFlight Mechanics Conference AIAA 97-3483 New Orleans LaUSA August 1997
[3] A Saraf J A Leavitt D T Chen and K D Mease ldquoDesignand evaluation of an acceleration guidance algorithm for entryrdquoJournal of Spacecraft and Rockets vol 41 no 6 pp 986ndash9962004
[4] L Bruyere ldquoDynamic inversion for missile lateral velocity con-trol via polynomial eigenstructure assignmentrdquo in Proceedingsof the AIAA Guidance Navigation and Control Conference andExhibit Austin Tex USA August 2003
[5] D M Acosta and S S Joshi ldquoAdaptive nonlinear dynamicinversion control of an autonomous airship for the explorationof titanrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Hilton Head Island SC USAAugust 2007
[6] Y-X Jiang and J Cui ldquoEffectiveness of weaving maneuverstrategy of a missilerdquo Journal of Beijing University of Aeronauticsand Astronautics vol 28 no 2 pp 133ndash136 2002
[7] W H Curry and J F Reed ldquoMeasurement of Magnus effectson a sounding rocket model in a supersonic wind tunnelrdquo inProceedings of the Aerodynamic Testing Conference AmericanInstitute of Aeronautics and Astronautics Los Angeles CalifUSA September 1966
[8] X R Mao S X Yang and Y Xu ldquoConing motion stability ofwrap around fin rocketsrdquo Science in China Series E Technologi-cal Sciences vol 50 no 3 pp 343ndash350 2007
[9] J Morote and G Liano ldquoStability analysis and flight trials ofa clipped wrap around fin configurationrdquo in Proceedings ofthe Aiaa Atmospheric Flight Mechanics Conference and ExhibitAAAI 2004-5055 American Institute of Aeronautics andAstro-nautics Providence RI USA August 2004
[10] J Song ldquoA velocity control method of the reentry vehicle basedon flight simulationrdquoMissiles and Space Vehicles no 2 pp 5ndash72012
[11] FWang X Liu J Liang and X Fang ldquoVelocity control methodbased on terminal restraintrdquo Flight Dynamics vol 29 no 6 pp52ndash55 2011
[12] X R Mao S X Yang and Y Xu ldquoResearch on the coningmotion of wrap-around fin projectilesrdquo Canadian Aeronauticsand Space Journal vol 52 no 3 pp 119ndash125 2006
[13] K Y Li L Y Zhao andW Zhou ldquoStability of coning motion ofspinning rocket projectiles at high altituderdquo Journal ofDynamicsand Control vol 10 no 3 pp 239ndash243 2012
[14] X R Mao and S X Yang ldquoOptimal control of coning motionof spinning missilesrdquo Journal of Aerospace Engineering vol 28no 2 Article ID 04014068 pp 1ndash10 2015
[15] H-B Wang and J-S Wu ldquoConing motion of rockets itsnumerical simulation and restraintrdquo Transaction of BeijingInstitute of Technology vol 27 no 3 pp 196ndash199 2007
[16] P K A Menon V H L Cheng C A Lin and M MBriggs ldquoHigh-performance missile synthesis with trajectoryand propulsion system optimizationrdquo Journal of Spacecraft andRockets vol 24 no 6 pp 552ndash557 1987
[17] X-P Bai Y-H Zhao and Y-N Liu ldquoA novel approach tostudy real-time dynamic optimization analysis and simulationcomplex mine logistics transportation hybrid system with beltand surge linksrdquo Discrete Dynamics in Nature and Society vol2015 Article ID 601578 8 pages 2015
[18] J T Betts Practical Methods for Optimal Control Using Nonlin-ear Programming SIAM 1st edition 2001
[19] F Fahroo and I M Ross ldquoCostate estimation by a Legendrepseudospectral methodrdquo Journal of Guidance Control andDynamics vol 24 no 2 pp 270ndash277 2001
[20] M M Khader N H Sweilam and W Y Kota ldquoCardinalfunctions for Legendre pseudo-spectral method for solving theintegro-differential equationsrdquo Journal of the Egyptian Mathe-matical Society vol 22 no 3 pp 511ndash516 2014
[21] C L Darby W W Hager and A V Rao ldquoDirect trajectoryoptimization using a variable low-order adaptive pseudospec-tral methodrdquo Journal of Spacecraft and Rockets vol 48 no 3pp 433ndash445 2011
[22] A Wachter and L T Biegler ldquoOn the implementation ofan interior-point filter line-search algorithm for large-scalenonlinear programmingrdquoMathematical Programming vol 106no 1 pp 25ndash57 2006
[23] L Bruyere B A Whitey and A Tsourdos ldquoDynamic inversionformissile lateral velocity control via polynomial eigenstructureassignmentrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference and Exhibit AIAA 2003-5792 AustinTex USA August 2003
[24] R S Sun C Ming and C J Sun ldquoTrajectory optimizationdesign for morphing wing missilerdquo Journal of Harbin Instituteof Technology vol 22 no 5 pp 48ndash53 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 3
Optimizetrajectory andvelocity profile
Proposea virtual moving
target
Model velocitycontrol and conduct
control law
Integration design forvelocity and
trajectory control
Figure 1 The process of the velocity control system design
Similarly the nonlinear state inequality constraints are
120572lower le 120572 (119905) le 120572upper
119886119910lower le 119886
119910 (119905) le 119886
119910upper(6)
For the purpose of the velocity control design twosubproblems are imperative to be solved One is to obtain theoptimal trajectory in the ideal condition In consideration ofthis subproblem the flight performance should be optimizedto produce the trajectory and velocity profile satisfying theabove requirements The other one is to control the missileflying path along the optimal trajectory in the same timeto ensure the coherence of the missile speed and the idealvelocity profile that is the integration of the trajectory andvelocity control should be considered
3 Velocity Control System Design
Theprocess of the velocity control systemdesign is conductedin Figure 1 Primarily the optimal trajectory and velocityprofile are carried out as a criterion for meeting the indexrequirementsThen in order to perform this velocity controla virtual moving target moving along the critical trajectoryis applied to guide the missile In terms of this the velocitycontrol schematic and model can be built and the velocitycontrol law and control parameters will be implementedincluding the integration design for velocity control andtrajectory control for a good performance of the coningmotion missile system
31 Trajectory and Velocity Profile Optimization With theadvent of computers and evolution of modern theories ofoptimal control the numerical computation techniques foroptimal atmospheric trajectories have been an active researcharea since the early 1970s The approaches on trajectory opti-mization are of two distinct categories such as direct methodbased on the mathematical programming and parameteriza-tion of state and control histories and the indirect methodgrounded on the solution of two-point boundary valueproblem (TPBVP) using optimal control principle [16ndash18]Because the guess of the initial values of costate variablesis random and there is a lack of physical implication theTPBVP is difficult to solve especially when the optimalsystem is accompanied with high nonlinearity and multipleconstraints (eg nonlinear trajectory optimization problem)The direct method has better convergence properties andthus can perform well with a poor initial guess [17] Fromthe mathematical point of view the KKT conditions of NLPtransformed by a discretization are equivalent to first-ordernecessary conditions of the original optimal control problemwhich means the solution of the NLP is equivalent to that ofthe original optimal control problem
Therefore the direct method is derived for the trajec-tory and the velocity profile optimization of the missileFurthermore the hp-adaptive Pseudospectral Method asa kind of efficient direct method is combining LegendrePseudospectral Method [19 20] and hp-adaptive method[21] which discretizes the state variables and control vari-ables on a series of Legendre-Gauss-Lobatto (LGL) pointsThrough constructing a Lagrange interpolation polynomialto approach the state variables and the control variables bytaking these discrete points as nodes the optimal controlproblem is transformed into a nonlinear dynamic program-ming problemThen the constraints of differential equationscan be altered into the form of algebra equations and sodo the integration item and the terminal status of the costfunction namely they can be calculated by using Gauss-Lobatto integration and integrating the right function frominitial status respectively When the calculation precisionduring some intervals fails to meet the requirement the col-location numbers and order number of global interpolationpolynomial should be adjusted adaptively in accordance withthe hp-adaptive method
Generally the discretization for the trajectory is con-ducted as follows For transforming flight time [119905
0 119905119891] into the
formof Legendre PseudospectralMethod [minus1 1] the variable119905 is converted to
120591 =
2119905
(119905119891minus 1199050)
minus
(119905119891+ 1199050)
(119905119891minus 1199050)
(7)
If 119870 is for the collocation numbers the state vector andcontrol vector will be approximately described by119870 Lagrangepolynomials 119871
119894(120591) considered as basis functions that is
x (120591) asymp X (120591) =
119870
sum
119894=1
L119894 (120591)X (120591
119894)
u (120591) asymp U (120591) =
119870
sum
119894=1
L119894 (120591)U (120591
119894)
(8)
where state vector x = [119881119872
120579 120595119881119909119872
119910119872
119911119872] and control
vector u = [120572]Derive (7) and the approximate derivation of state vector
is
x (120591119896) asymp X (120591
119896) =
119870
sum
119894=1
L119894(120591119896)X (120591119894) (9)
The constraint of dynamics equations thus is converted tothe form of algebra constraint that is
119870
sum
119894=1
D119896119894X (120591119894) minus
119905119891minus 1199050
2
119891 (X (120591119896)) = 0 (10)
4 Discrete Dynamics in Nature and Society
Solve NLP
No
Yes
No
Calculate costfunction J
Updatecontrolvariable
Calculate ratio of maximumcurvature to average curvature r
YesNo
Generatenew mesh
Solutionmeets errortolerance
Update numberof collocation
points in mesh
Transcribe trajectoryoptimization into NLP
Yes
Quit
Start
Update orderof interpolating
polynomial
Compute LGR pointsweights
and differentiation matrices
UntranscribeNLP
solution todiscreteoptimalcontrol
problem
Is Jminimum
Updateparameters
r lt rmax
Figure 2 Schematic of hp-adaptive pseudospectral algorithm to solve optimal control problem
whereD119896119894= L119894(120591119896)means differentiation matrix of Legendre
Pseudospectral MethodIn terms of the above process of discretization the
interior-point method is applied to deal with the boundedconstraints of the inequality such as (4) (5) and (6) thatis a barrier term 120583 is brought in to the objective functionfor completely avoiding this problem of bound constraintsFortunately C++ software pack (Ipopt) [22] of the interior-point method can be utilized to solve this discrete nonlinearprogramming (NLP) A design philosophy is described toenable the optimal generic design by using the hp-adaptivePseudospectral Method outlined briefly in Figure 2 Thenthe schematic of algorithm to solve optimal control problemcan be described as follows
(1) Initialize a new mesh grid
(2) Discretize the continuous optimization control prob-lem through the Legendre Pseudospectral Method
and transform it into NLP problem through com-puting LGR points (X(120591
119894)U(120591119894)) weights L
119894(120591) and
differentiation matricesD119896
(3) Solve the NLP problem by using the interior-pointmethod
(4) Update control variable and go back to Step (3) if theindex 119869 of cost function is not minimized
(5) Quit the optimization process otherwise updateparameters and go back to Step (2) if the solution ofstate and path constraints meets error tolerance
32 Trajectory Control by Tracking Virtual Moving TargetAfter obtaining the standard optimization trajectory andvelocity control profile the task shifts to pursuit of a designto make the missile fly along the ideal trajectory as well asthe velocity profileThe conventional guidancemethod of theshaped trajectory can ensure the performance of the precisionto the fixed target which does not consider the requirement
Discrete Dynamics in Nature and Society 5
(xT0 yT0)
VT0
T
M
A
O
VT
VM
xT y
xVTflowast
Figure 3 Kinematical relationship of the missile and the virtualtarget
of the velocity control Therefore a virtual target proposedhere is to afford a possibility of velocity control for themissileConcretely a virtual target is designed tomove exactly like theideal movement of the missile that is to move strictly alongthe standard optimized trajectory 1006704AOwith the same speed tothe velocity profile If a control design is developed to makethe missile precisely chase the virtual target the requirementof the velocity will be naturally satisfied for the missile flyingalong the ideal trajectory Thus in terms of the longitudinalplane of the kinematics described in Figure 3 all parametersof the position (119909
119879 119910119879) and velocity 119881
119879including initial
position (1199091198790 1199101198790) ideal initial velocity 119881
1198790 and anticipant
terminal velocity 119881119879119891lowast can be obtained from the information
of the optimized trajectory
33 Velocity Control Methodology Figure 4 depicts the totalcontrol flow of the coning motion control It is known thatthe desired initial velocity119881
1198720lowast (start from point A shown in
Figure 3) can be conducted by using the above hp-adaptivepseudospectral trajectory optimization method for decidingwhether the coning motion is need Besides in considerationof the influence of the control dynamics to the velocity theconing motion will be made to descent of the flight velocitywhen real velocity 119881
1198720is more than 11 119881
1198720lowast
Obviously the relative velocity and distance between themissile and the virtual target can be written as Δ119881 = 119881
119872minus119881119879
and Δ119877 = 119877119879minus 119877119872 respectively Here let Δ119877 be larger
than zero when the target moves in front of the missile Ifthe missile motion satisfies the condition of Δ119877 gt 0 or119881119872
lt 119881119879 the terminal velocity will surely meet the index
constraint Thus the velocity control system can be built upin accordance with the relationship of the relative distanceand speed between the missile and the virtual target (seeFigure 5) Then the velocity control law can be formulatedas
119886119909119888
= 119891 (Δ119881 Δ119877) = 119870119877(Δ119877 minus Δ119877
119905) + 119870119881(119881119879minus 119881119872) (11)
where Δ119877119905is the desired distance between the missile and
the virtual target and 119870119877and 119870
119881denote the velocity control
gainsFor the sake of convenience of analysis it is good to
suppose the anticipant distance between the missile and
NoSuspend coning motion
Restart coning motionGuidance withconing motion
Yes
Proportionalguidance
No
Start
No Coning motionend
Need decelerationMissilemotion
Yes
Yes
Δayc Δazc
ayc azc
Proportionalguidance
VM0 gt 11 middot VM0lowast
VM gt VTlowast
Figure 4 Control flow chart of the coning motion control
1
s
1
s
+
+
+
minus
minus
VTKV
KR
ΔR ΔRt
VM
axc
Figure 5 Velocity control structure of the missile
the virtual target to be 0 that isΔ119877119905= 0Therefore the veloc-
ity control law will be simplified as
119891 (Δ119881 Δ119877) = 119870119877Δ119877 + 119870
119881Δ119881 (12)
If the missile overlaps at the position of virtual targetfor example 119891(Δ119881 Δ119877) = 0 Δ119881 = 0 Δ119877 = 0 theindex of terminal velocity is satisfied naturally Moreover if119891(Δ119881 Δ119877) lt 0 there are two circumstances (1) the missilemoves in back of the virtual target and (2) the missile is infront of the virtual target but the speedmagnitude is less thanthat of virtual target Since the virtual target moves along theideal flight trajectory all over the circumstances of (1) and(2) will both satisfy the terminal velocity index Additionallythe kinetic energy of the missile is unnecessarily large when119891(Δ119881 Δ119877) gt 0 which will result in the missile decelerationby coning motion
Consequently the cost function 119891(Δ119881 Δ119877) determineswhether the velocity control is required For example if119891(Δ119881 Δ119877) is less than zero the missile coningmotion shouldbe paused and the proportional navigation guidance to
6 Discrete Dynamics in Nature and Society
the target should be switched on as well Otherwise if119891(Δ119881 Δ119877) is greater than zero the coning motion will berestarted
According to the control structure of themissile dynamicinversion theory [23] can be used to design the controlparameters 119870
119877and 119870
119881 The equation related to the velocity
shown in Figure 3 is expressed as
119898119872
= minus119902119878119862119909minus 119898119892 sin 120579 (13)
Replacing 119872with 119886
119909119888gives
119886119909119888
=
minus119902119878119862119909
119898
minus 119892 sin 120579 (14)
From the velocity control structure outlined in Figure 4transfer function 119881
119879to 119881119872becomes
119882(119904) =
119881119872 (119904)
119881119879 (
119904)
=
119870119881119904 + 119870119877
1199042+ 119870119881119904 + 119870119877
(15)
where the 2nd-order characteristic equation is
1199042+ 119870119881119904 + 119870119877= 0 (16)
Control gains 119870119881and 119870
119877are determined such that 119881
119872
may become its desiring velocity 119881119879 Apparently from the
linear system theory the stability of the system is ascertainedby the pole points and the system is stable only when all polepoints are located at the left of 119904 plane
(1) If 1198702119881
ge 4119870119877 since 119870
119881and 119870
119877are both over zero
the two characteristic roots of the system will be bothminus real numbers which can be written as
11990412
=
minus119870119881plusmn radic119870
2
119881minus 4119870119877
2
(17)
(2) If 1198702119881lt 4119870119877 11990412
changes to
11990412
=
minus119870119881plusmn 119894radic4119870
119877minus 1198702
119881
2
(18)
Apparently the nearer pole to the imaginary axis pri-marily determines the speed of output response of the abovesystem Therefore if the poles 119904
12have the same minus real
part that is when 1198702
119881le 4119870
119877 it is possible to obtain the
fastest output response Synchronously the imaginary partof the characteristic roots determines the magnitude of theovershoot In general the relative damping value of system isoptimally set toradic22 and then the equation
radic4119870119877minus 1198702
119881
119870119881
=
radic2
2
(19)
gives
119870119877=
3
8
1198702
119881 (20)
Let 119881119879(119904) = 1119904 substituting it into transfer function (15)
yields
119881119872 (119904) =
1
119904
sdot
119870119881119904 + 119870119877
1199042+ 119870119881119904 + 119870119877
=
1
119904
minus
1
119904 + 05119870119881
+
05119870119881
(119904 + 05119870119881)2
(21)
which can be described in the time-domain form by applyingLaplace inverse transform that is
119881119872 (119905) = 1 + 119890
minus05119870119881sdot119905(05119870
119881sdot 119905 minus 1) (22)
Besides by differentiating (22) it becomes
dd119905119881119872 (119905) =
1
2
119870119881119890minus(12)119870119881sdot119905
(2 minus
1
2
119870119881119905) (23)
Let (dd119905)119881119872(119905) = 0 and the settling time of the system can
be given as
119879119901=
4
119870119881
(24)
In order to ensure the performance of the system thesettling time 119879
119901is generally set to the triple of the time
constant of the missile 119879119889 namely
119879119901= 3119879119889 (25)
By combining (20) (24) and (25) the solution to thevelocity control law is
119870119881=
4
3119879119889
119870119877=
3
8
1198702
119881
(26)
When the missile does pure coning motion the acceler-ation commands in longitudinal and lateral plane 119886
120575119910119888and
119886120575119911119888
are
119886120575119910119888
= 119886120575sin120596119905
119886120575119911119888
= 119886120575cos120596119905
(27)
where 120596 represents a circular frequency and 119886120575is the accel-
eration command corresponding to command of AOA 120575 incondition of the pure coning motion
In accordance with the velocity control law shown in (12)drag force command119883
119888can be acquired as
minus119883119888= 119898119886119909119888+ 119898119892 sin 120579 (28)
which gives the lift force command
119884119888= 119901119883119888= 119901 sdot (119898119886
119909119888+ 119898119892 sin 120579) (29)
where 119901means lift-drag ratio So
119886120575=
119884119888
119898
=
119901119883119888
119898
=
119901 sdot (119898119886119909119888+ 119898119892 sin 120579)119898
asymp 119901 (119870119881Δ119881 + 119870
119877Δ119877)
(30)
Discrete Dynamics in Nature and Society 7
34 Integrated Design for Velocity Control and TrajectoryControl On the other hand in order to make the missile hitthe target precisely it is necessary to design an appropriatecontrol law under which the normal acceleration 119886
119898can be
formulated with the relative motion between the missile andthe target as follows
119886119898= 119891 (119903 120585) (31)
where 119903 denotes directive distance betweenmissile and targetand 120585 is angle of line-of-sight (LOS)
Traditional control laws are determined to approach theconvergence of the distance and the LOS rate between themissile and the target For instance in terms of classicproportional navigation (PN) method it is concluded thatmissile acceleration commands 119886
119898are in proportion to the
rate of LOS 120585
From (27) the integrated guidance commands can bewritten as follows
119886119910119888
= Δ119886119910119888+ 119886120575sin120596119905
119886119911119888= Δ119886119911119888+ 119886120575cos120596119905
(32)
where Δ119886119910119888
and Δ119886119911119888
denote the normal PN commands inlongitudinal and lateral plane respectively
As given in (32) if the velocity meets the anticipantrequirement that is 119886
120575= 0 the missile will stop coning
motion andwill fly through the proportion guidance law so asto hit the target accurately Otherwise the missile will do theconingmotion whichmakes a continuous alternate changingbetween the angle of attack 120575 sin120596119905 and sideslip angle120575 cos120596119905 respectively In an alternating cycle the equivalentlift force produced by the alternate AOA is equal to zero andthe same to the side force That is to say only the drag forceincreases during the period of coning motion
Additionally consistent with the normal control com-mands Δ119886
119910119888and Δ119886
119911119888 the total AOA of the missile can be
given as
Δ = radic1205722+ 1205732
= radic(Δ120572 + 120575 sin120596119905)2 + (Δ120573 + 120575 cos120596119905)2
= radicΔ1205722+ Δ1205732+ ℎ (120575 Δ120572 Δ120573) + 120575
2
(33)
where 120573 represents sideslip angle and ℎ(120575 Δ120572 Δ120573) =
2120575(Δ120572 sin120596119905 + Δ120573 cos120596119905)From (33) if the missile flies without coning motion that
is 120575 = 0 the total AOA will be simplified as
Δ = radicΔ1205722+ Δ1205732 (34)
Since ℎ(120575 Δ120572 Δ120573) changes periodically with time asshown in (33) it is possible that the missile with coningmotion produces less total AOA than that without coningmotion when the item ℎ(120575 Δ120572 Δ120573) + 120575
2lt 0 That is to
say coning motion control results in the missilersquos dragdecrease especially when the weight of the missile gravity
in the direction of the velocity is over the drag force that isminus119902119878119862119909minus 119898119892 sin 120579 gt 0 and it is concluded that the speed of
the missile will increase and not decrease Consequently toprevent this from happening the inequation can be supposedas
Δ120572 sin120596119905 + Δ120573 cos120596119905 gt 0 (35)
which gives
radicΔ1205722+ Δ1205732 sin (120596119905 + 120596
0) gt 0 (36)
where 1205960is equal to acos(Δ120572radicΔ120572
2+ Δ1205732)
In order to meet inequation (36) all along circularfrequency 120596 should satisfy
2120587119899 le 120596119905 + 1205960le 2120587119899 + 120587 119899 isin 119864 (37)
So2120587119899 minus 120596
0
119905
le 120596 le
2120587119899 + 120587 minus 1205960
119905
(38)
In view of the dynamic characteristics of the missile andthe performance of the actuator the bandwidth of the coiningmotion command must be less than that of the actuatorOtherwise it is difficult for the missile guidance system totrack the guidance commandThus the angular ratio 120596mustbe subject to 120596 lt 120596
119879 that is
2120587119899 + 120587 minus 1205960
119905
lt 120596119879
119899 = Round [120596119879119905 minus 120587 + 120596
0
2120587
] (39)
where 120596119879represents the bandwidth of the system
4 Simulation Example
In this section a simulation example of the velocity controlsystem by using coning motion technique is demonstratedfor a missile whose indexes include terminal speed terminalpath angle and miss distance In order to exhibit the velocitycontrol performance the conventional PN mode withoutthe coning motion and particle swarm optimization (PSO)approach are involved for comparing studyThe initial condi-tions that the missile makes coning motion are set as followsthe initial values of 119910 120579 119881 and Ψ
119881are set to be 119909(0) =
minus19 km 119910(0) = 10 km 120579(0) = minus20 deg 119881(0) = 500msand Ψ
119881(0) = 0 deg The initial position of the virtual target is
selected as (minus7292 9329 0)m besides the total flight time 119905119879
638 s The flight constraints are set as 120579low = minus30∘ 120579top = 30
∘119910low = 0 km 119910top = 10 km119881
119891= 250ms 120579
119891= minus25
∘ 120572down =minus20 deg 120572up = 20 deg 119886
119910down = minus50ms2 and 119886119910up = 50m
s2 Additionally the design process of PSO trajectory isreferred to [24] and the parameters of the adopted PSOmethod are 119898 = 50 119899 = 2 and 119888
1= 1198882= 18 Inertial weight
119908 is set to be reduced linearly from 10 to 04 and the searchwill be terminated if the fitness value is less than 04 or thenumber of iteration reaches 150
According to the above integrated design method forvelocity control and trajectory control the simulation results
8 Discrete Dynamics in Nature and Society
Table 1 Simulation results produced by different guidance laws
Guidance withvelocity control
Guidance withoutvelocity control
Optimizationtrajectory profile PSO trajectory profile
Final velocity (ms) 25409 28136 2550 2556Final flying path angle (deg) minus1565 minus2018 minus2146 minus2093Miss distance (m) 22 16 06 08
minus20minus15
minus10minus50
minus1minus05
005
1
0
2
4
6
8
10
x (km)
y(k
m)
z (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 6 3D curve of the flight trajectories with different modes
020
4060
80
minus10minus5
05
1015
minus10
minus5
0
5
10
15
B
A
Optimal trajectoryPSO trajectory
PN modeConing motion mode
t (s)
120572(d
eg)
120573 (deg)
Figure 7 History curve of the coning motion
are illustrated in Figures 6ndash13 Comparing the results of theoptimalmethod proposed in this paper with those of the PSOapproach it is concluded that the optimization solutions oftwo approaches are almost the same which implies the pre-sented direct discretizationmethod has sufficient precision ofoptimization stratifying the requirements of the constraintsas exhibited in Table 1
Additionally as the result shown in Figure 6 the velocitycontrol system has got the same normal control performance
minus15 minus10 minus5 0 5 10 15
minus10
minus5
0
5
10
A
B
120572(d
eg)
120573 (deg)
StartEnd
Figure 8 Variation of the nutation angle
minus20 minus15 minus10 minus5 0250
300
350
400
450
500
550
600
(m
s)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 9 Response of the velocity in different condition
to the conventional proportional navigation scheme FromFigures 7-8 where points A and B denote the start andend of the coning motion respectively the control systemimproves the magnitude amount of induced AOA whichmakes the missilersquos drag increase Therefore the speed of themissile decreases apparently in this period as illustrated in
Discrete Dynamics in Nature and Society 9
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120572(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 10 Variation of the angle of attack
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120573(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 11 Variation of the sideslip angle
Figure 9 Meanwhile Figures 10-11 indicate that the coningmotion control suspends at the range of 13 km and switchesinto the pure proportion guidance mode which suggeststhat the missile velocity is gradually moving to the indexof requirement because the magnitudes of the attack andsideslip angles are both getting smaller with the missileapproaching to the virtual target According to the path anglecurves outlined in Figures 12-13 it is helpful to suspendthe coning motion control before hitting the target becausethe coning motion reduces the tracking precision to theideal trajectory Finally as shown in Table 1 both guidancemodes meet the requirements of high guidance precision andterminal path angle but the coning motion control systemproduces lower amount of terminal velocity which is in linewith the desired velocity index
minus20 minus15 minus10 minus5 0minus40
minus35
minus30
minus25
minus20
minus15
minus10
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
120579(d
eg)
Figure 12 Curve of the trajectory inclination angle
minus20 minus15 minus10 minus5 0minus3
minus2
minus1
0
1
2
3
4
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
ΨV
(deg
)
Figure 13 Curve of the path angle versus range
5 Conclusions
In this paper a novel coning motion based guidance methodis proposed for the velocity control of missile system withterminal velocity constraint An ideal velocity profile is pre-sented by using nonlinear programming method in which avirtual moving target is put forward for missile to chase soas to perform the velocity control Moreover the dynamicinversion theory is applied to design the velocity controlsystem parameters To show the effectiveness of the controllaw comparative simulations of a missile in which pureproportional navigation mode has been taken into consid-eration are provided Simulation results demonstrate thatthe proposed velocity control law has a good performanceproviding reference to the design for velocity control system
10 Discrete Dynamics in Nature and Society
of the missileThe extensions of the presented coningmotioncontrol laws to a spinning missile and the inclusion of thedynamics in the velocity control system are possible areas offurther research
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Natural Science Founda-tion of China (NSFC) under Grant no 11176012 and theResearch Innovation Project for Graduate Student of Jiangsu-Provincial Ordinary University under Grant no KLYX15-0394
References
[1] K Enomoto T Yamasakiy H Taknoz and Y Baba ldquoA study ona velocity control system design using the dynamic inversionmethodrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference AIAA 2010-8204 Toronto Canada August2010
[2] V Istratie ldquoThree-dimensional optimal skip entrywith terminalmaximum velocityrdquo in Proceedings of the 22nd AtmosphericFlight Mechanics Conference AIAA 97-3483 New Orleans LaUSA August 1997
[3] A Saraf J A Leavitt D T Chen and K D Mease ldquoDesignand evaluation of an acceleration guidance algorithm for entryrdquoJournal of Spacecraft and Rockets vol 41 no 6 pp 986ndash9962004
[4] L Bruyere ldquoDynamic inversion for missile lateral velocity con-trol via polynomial eigenstructure assignmentrdquo in Proceedingsof the AIAA Guidance Navigation and Control Conference andExhibit Austin Tex USA August 2003
[5] D M Acosta and S S Joshi ldquoAdaptive nonlinear dynamicinversion control of an autonomous airship for the explorationof titanrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Hilton Head Island SC USAAugust 2007
[6] Y-X Jiang and J Cui ldquoEffectiveness of weaving maneuverstrategy of a missilerdquo Journal of Beijing University of Aeronauticsand Astronautics vol 28 no 2 pp 133ndash136 2002
[7] W H Curry and J F Reed ldquoMeasurement of Magnus effectson a sounding rocket model in a supersonic wind tunnelrdquo inProceedings of the Aerodynamic Testing Conference AmericanInstitute of Aeronautics and Astronautics Los Angeles CalifUSA September 1966
[8] X R Mao S X Yang and Y Xu ldquoConing motion stability ofwrap around fin rocketsrdquo Science in China Series E Technologi-cal Sciences vol 50 no 3 pp 343ndash350 2007
[9] J Morote and G Liano ldquoStability analysis and flight trials ofa clipped wrap around fin configurationrdquo in Proceedings ofthe Aiaa Atmospheric Flight Mechanics Conference and ExhibitAAAI 2004-5055 American Institute of Aeronautics andAstro-nautics Providence RI USA August 2004
[10] J Song ldquoA velocity control method of the reentry vehicle basedon flight simulationrdquoMissiles and Space Vehicles no 2 pp 5ndash72012
[11] FWang X Liu J Liang and X Fang ldquoVelocity control methodbased on terminal restraintrdquo Flight Dynamics vol 29 no 6 pp52ndash55 2011
[12] X R Mao S X Yang and Y Xu ldquoResearch on the coningmotion of wrap-around fin projectilesrdquo Canadian Aeronauticsand Space Journal vol 52 no 3 pp 119ndash125 2006
[13] K Y Li L Y Zhao andW Zhou ldquoStability of coning motion ofspinning rocket projectiles at high altituderdquo Journal ofDynamicsand Control vol 10 no 3 pp 239ndash243 2012
[14] X R Mao and S X Yang ldquoOptimal control of coning motionof spinning missilesrdquo Journal of Aerospace Engineering vol 28no 2 Article ID 04014068 pp 1ndash10 2015
[15] H-B Wang and J-S Wu ldquoConing motion of rockets itsnumerical simulation and restraintrdquo Transaction of BeijingInstitute of Technology vol 27 no 3 pp 196ndash199 2007
[16] P K A Menon V H L Cheng C A Lin and M MBriggs ldquoHigh-performance missile synthesis with trajectoryand propulsion system optimizationrdquo Journal of Spacecraft andRockets vol 24 no 6 pp 552ndash557 1987
[17] X-P Bai Y-H Zhao and Y-N Liu ldquoA novel approach tostudy real-time dynamic optimization analysis and simulationcomplex mine logistics transportation hybrid system with beltand surge linksrdquo Discrete Dynamics in Nature and Society vol2015 Article ID 601578 8 pages 2015
[18] J T Betts Practical Methods for Optimal Control Using Nonlin-ear Programming SIAM 1st edition 2001
[19] F Fahroo and I M Ross ldquoCostate estimation by a Legendrepseudospectral methodrdquo Journal of Guidance Control andDynamics vol 24 no 2 pp 270ndash277 2001
[20] M M Khader N H Sweilam and W Y Kota ldquoCardinalfunctions for Legendre pseudo-spectral method for solving theintegro-differential equationsrdquo Journal of the Egyptian Mathe-matical Society vol 22 no 3 pp 511ndash516 2014
[21] C L Darby W W Hager and A V Rao ldquoDirect trajectoryoptimization using a variable low-order adaptive pseudospec-tral methodrdquo Journal of Spacecraft and Rockets vol 48 no 3pp 433ndash445 2011
[22] A Wachter and L T Biegler ldquoOn the implementation ofan interior-point filter line-search algorithm for large-scalenonlinear programmingrdquoMathematical Programming vol 106no 1 pp 25ndash57 2006
[23] L Bruyere B A Whitey and A Tsourdos ldquoDynamic inversionformissile lateral velocity control via polynomial eigenstructureassignmentrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference and Exhibit AIAA 2003-5792 AustinTex USA August 2003
[24] R S Sun C Ming and C J Sun ldquoTrajectory optimizationdesign for morphing wing missilerdquo Journal of Harbin Instituteof Technology vol 22 no 5 pp 48ndash53 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Discrete Dynamics in Nature and Society
Solve NLP
No
Yes
No
Calculate costfunction J
Updatecontrolvariable
Calculate ratio of maximumcurvature to average curvature r
YesNo
Generatenew mesh
Solutionmeets errortolerance
Update numberof collocation
points in mesh
Transcribe trajectoryoptimization into NLP
Yes
Quit
Start
Update orderof interpolating
polynomial
Compute LGR pointsweights
and differentiation matrices
UntranscribeNLP
solution todiscreteoptimalcontrol
problem
Is Jminimum
Updateparameters
r lt rmax
Figure 2 Schematic of hp-adaptive pseudospectral algorithm to solve optimal control problem
whereD119896119894= L119894(120591119896)means differentiation matrix of Legendre
Pseudospectral MethodIn terms of the above process of discretization the
interior-point method is applied to deal with the boundedconstraints of the inequality such as (4) (5) and (6) thatis a barrier term 120583 is brought in to the objective functionfor completely avoiding this problem of bound constraintsFortunately C++ software pack (Ipopt) [22] of the interior-point method can be utilized to solve this discrete nonlinearprogramming (NLP) A design philosophy is described toenable the optimal generic design by using the hp-adaptivePseudospectral Method outlined briefly in Figure 2 Thenthe schematic of algorithm to solve optimal control problemcan be described as follows
(1) Initialize a new mesh grid
(2) Discretize the continuous optimization control prob-lem through the Legendre Pseudospectral Method
and transform it into NLP problem through com-puting LGR points (X(120591
119894)U(120591119894)) weights L
119894(120591) and
differentiation matricesD119896
(3) Solve the NLP problem by using the interior-pointmethod
(4) Update control variable and go back to Step (3) if theindex 119869 of cost function is not minimized
(5) Quit the optimization process otherwise updateparameters and go back to Step (2) if the solution ofstate and path constraints meets error tolerance
32 Trajectory Control by Tracking Virtual Moving TargetAfter obtaining the standard optimization trajectory andvelocity control profile the task shifts to pursuit of a designto make the missile fly along the ideal trajectory as well asthe velocity profileThe conventional guidancemethod of theshaped trajectory can ensure the performance of the precisionto the fixed target which does not consider the requirement
Discrete Dynamics in Nature and Society 5
(xT0 yT0)
VT0
T
M
A
O
VT
VM
xT y
xVTflowast
Figure 3 Kinematical relationship of the missile and the virtualtarget
of the velocity control Therefore a virtual target proposedhere is to afford a possibility of velocity control for themissileConcretely a virtual target is designed tomove exactly like theideal movement of the missile that is to move strictly alongthe standard optimized trajectory 1006704AOwith the same speed tothe velocity profile If a control design is developed to makethe missile precisely chase the virtual target the requirementof the velocity will be naturally satisfied for the missile flyingalong the ideal trajectory Thus in terms of the longitudinalplane of the kinematics described in Figure 3 all parametersof the position (119909
119879 119910119879) and velocity 119881
119879including initial
position (1199091198790 1199101198790) ideal initial velocity 119881
1198790 and anticipant
terminal velocity 119881119879119891lowast can be obtained from the information
of the optimized trajectory
33 Velocity Control Methodology Figure 4 depicts the totalcontrol flow of the coning motion control It is known thatthe desired initial velocity119881
1198720lowast (start from point A shown in
Figure 3) can be conducted by using the above hp-adaptivepseudospectral trajectory optimization method for decidingwhether the coning motion is need Besides in considerationof the influence of the control dynamics to the velocity theconing motion will be made to descent of the flight velocitywhen real velocity 119881
1198720is more than 11 119881
1198720lowast
Obviously the relative velocity and distance between themissile and the virtual target can be written as Δ119881 = 119881
119872minus119881119879
and Δ119877 = 119877119879minus 119877119872 respectively Here let Δ119877 be larger
than zero when the target moves in front of the missile Ifthe missile motion satisfies the condition of Δ119877 gt 0 or119881119872
lt 119881119879 the terminal velocity will surely meet the index
constraint Thus the velocity control system can be built upin accordance with the relationship of the relative distanceand speed between the missile and the virtual target (seeFigure 5) Then the velocity control law can be formulatedas
119886119909119888
= 119891 (Δ119881 Δ119877) = 119870119877(Δ119877 minus Δ119877
119905) + 119870119881(119881119879minus 119881119872) (11)
where Δ119877119905is the desired distance between the missile and
the virtual target and 119870119877and 119870
119881denote the velocity control
gainsFor the sake of convenience of analysis it is good to
suppose the anticipant distance between the missile and
NoSuspend coning motion
Restart coning motionGuidance withconing motion
Yes
Proportionalguidance
No
Start
No Coning motionend
Need decelerationMissilemotion
Yes
Yes
Δayc Δazc
ayc azc
Proportionalguidance
VM0 gt 11 middot VM0lowast
VM gt VTlowast
Figure 4 Control flow chart of the coning motion control
1
s
1
s
+
+
+
minus
minus
VTKV
KR
ΔR ΔRt
VM
axc
Figure 5 Velocity control structure of the missile
the virtual target to be 0 that isΔ119877119905= 0Therefore the veloc-
ity control law will be simplified as
119891 (Δ119881 Δ119877) = 119870119877Δ119877 + 119870
119881Δ119881 (12)
If the missile overlaps at the position of virtual targetfor example 119891(Δ119881 Δ119877) = 0 Δ119881 = 0 Δ119877 = 0 theindex of terminal velocity is satisfied naturally Moreover if119891(Δ119881 Δ119877) lt 0 there are two circumstances (1) the missilemoves in back of the virtual target and (2) the missile is infront of the virtual target but the speedmagnitude is less thanthat of virtual target Since the virtual target moves along theideal flight trajectory all over the circumstances of (1) and(2) will both satisfy the terminal velocity index Additionallythe kinetic energy of the missile is unnecessarily large when119891(Δ119881 Δ119877) gt 0 which will result in the missile decelerationby coning motion
Consequently the cost function 119891(Δ119881 Δ119877) determineswhether the velocity control is required For example if119891(Δ119881 Δ119877) is less than zero the missile coningmotion shouldbe paused and the proportional navigation guidance to
6 Discrete Dynamics in Nature and Society
the target should be switched on as well Otherwise if119891(Δ119881 Δ119877) is greater than zero the coning motion will berestarted
According to the control structure of themissile dynamicinversion theory [23] can be used to design the controlparameters 119870
119877and 119870
119881 The equation related to the velocity
shown in Figure 3 is expressed as
119898119872
= minus119902119878119862119909minus 119898119892 sin 120579 (13)
Replacing 119872with 119886
119909119888gives
119886119909119888
=
minus119902119878119862119909
119898
minus 119892 sin 120579 (14)
From the velocity control structure outlined in Figure 4transfer function 119881
119879to 119881119872becomes
119882(119904) =
119881119872 (119904)
119881119879 (
119904)
=
119870119881119904 + 119870119877
1199042+ 119870119881119904 + 119870119877
(15)
where the 2nd-order characteristic equation is
1199042+ 119870119881119904 + 119870119877= 0 (16)
Control gains 119870119881and 119870
119877are determined such that 119881
119872
may become its desiring velocity 119881119879 Apparently from the
linear system theory the stability of the system is ascertainedby the pole points and the system is stable only when all polepoints are located at the left of 119904 plane
(1) If 1198702119881
ge 4119870119877 since 119870
119881and 119870
119877are both over zero
the two characteristic roots of the system will be bothminus real numbers which can be written as
11990412
=
minus119870119881plusmn radic119870
2
119881minus 4119870119877
2
(17)
(2) If 1198702119881lt 4119870119877 11990412
changes to
11990412
=
minus119870119881plusmn 119894radic4119870
119877minus 1198702
119881
2
(18)
Apparently the nearer pole to the imaginary axis pri-marily determines the speed of output response of the abovesystem Therefore if the poles 119904
12have the same minus real
part that is when 1198702
119881le 4119870
119877 it is possible to obtain the
fastest output response Synchronously the imaginary partof the characteristic roots determines the magnitude of theovershoot In general the relative damping value of system isoptimally set toradic22 and then the equation
radic4119870119877minus 1198702
119881
119870119881
=
radic2
2
(19)
gives
119870119877=
3
8
1198702
119881 (20)
Let 119881119879(119904) = 1119904 substituting it into transfer function (15)
yields
119881119872 (119904) =
1
119904
sdot
119870119881119904 + 119870119877
1199042+ 119870119881119904 + 119870119877
=
1
119904
minus
1
119904 + 05119870119881
+
05119870119881
(119904 + 05119870119881)2
(21)
which can be described in the time-domain form by applyingLaplace inverse transform that is
119881119872 (119905) = 1 + 119890
minus05119870119881sdot119905(05119870
119881sdot 119905 minus 1) (22)
Besides by differentiating (22) it becomes
dd119905119881119872 (119905) =
1
2
119870119881119890minus(12)119870119881sdot119905
(2 minus
1
2
119870119881119905) (23)
Let (dd119905)119881119872(119905) = 0 and the settling time of the system can
be given as
119879119901=
4
119870119881
(24)
In order to ensure the performance of the system thesettling time 119879
119901is generally set to the triple of the time
constant of the missile 119879119889 namely
119879119901= 3119879119889 (25)
By combining (20) (24) and (25) the solution to thevelocity control law is
119870119881=
4
3119879119889
119870119877=
3
8
1198702
119881
(26)
When the missile does pure coning motion the acceler-ation commands in longitudinal and lateral plane 119886
120575119910119888and
119886120575119911119888
are
119886120575119910119888
= 119886120575sin120596119905
119886120575119911119888
= 119886120575cos120596119905
(27)
where 120596 represents a circular frequency and 119886120575is the accel-
eration command corresponding to command of AOA 120575 incondition of the pure coning motion
In accordance with the velocity control law shown in (12)drag force command119883
119888can be acquired as
minus119883119888= 119898119886119909119888+ 119898119892 sin 120579 (28)
which gives the lift force command
119884119888= 119901119883119888= 119901 sdot (119898119886
119909119888+ 119898119892 sin 120579) (29)
where 119901means lift-drag ratio So
119886120575=
119884119888
119898
=
119901119883119888
119898
=
119901 sdot (119898119886119909119888+ 119898119892 sin 120579)119898
asymp 119901 (119870119881Δ119881 + 119870
119877Δ119877)
(30)
Discrete Dynamics in Nature and Society 7
34 Integrated Design for Velocity Control and TrajectoryControl On the other hand in order to make the missile hitthe target precisely it is necessary to design an appropriatecontrol law under which the normal acceleration 119886
119898can be
formulated with the relative motion between the missile andthe target as follows
119886119898= 119891 (119903 120585) (31)
where 119903 denotes directive distance betweenmissile and targetand 120585 is angle of line-of-sight (LOS)
Traditional control laws are determined to approach theconvergence of the distance and the LOS rate between themissile and the target For instance in terms of classicproportional navigation (PN) method it is concluded thatmissile acceleration commands 119886
119898are in proportion to the
rate of LOS 120585
From (27) the integrated guidance commands can bewritten as follows
119886119910119888
= Δ119886119910119888+ 119886120575sin120596119905
119886119911119888= Δ119886119911119888+ 119886120575cos120596119905
(32)
where Δ119886119910119888
and Δ119886119911119888
denote the normal PN commands inlongitudinal and lateral plane respectively
As given in (32) if the velocity meets the anticipantrequirement that is 119886
120575= 0 the missile will stop coning
motion andwill fly through the proportion guidance law so asto hit the target accurately Otherwise the missile will do theconingmotion whichmakes a continuous alternate changingbetween the angle of attack 120575 sin120596119905 and sideslip angle120575 cos120596119905 respectively In an alternating cycle the equivalentlift force produced by the alternate AOA is equal to zero andthe same to the side force That is to say only the drag forceincreases during the period of coning motion
Additionally consistent with the normal control com-mands Δ119886
119910119888and Δ119886
119911119888 the total AOA of the missile can be
given as
Δ = radic1205722+ 1205732
= radic(Δ120572 + 120575 sin120596119905)2 + (Δ120573 + 120575 cos120596119905)2
= radicΔ1205722+ Δ1205732+ ℎ (120575 Δ120572 Δ120573) + 120575
2
(33)
where 120573 represents sideslip angle and ℎ(120575 Δ120572 Δ120573) =
2120575(Δ120572 sin120596119905 + Δ120573 cos120596119905)From (33) if the missile flies without coning motion that
is 120575 = 0 the total AOA will be simplified as
Δ = radicΔ1205722+ Δ1205732 (34)
Since ℎ(120575 Δ120572 Δ120573) changes periodically with time asshown in (33) it is possible that the missile with coningmotion produces less total AOA than that without coningmotion when the item ℎ(120575 Δ120572 Δ120573) + 120575
2lt 0 That is to
say coning motion control results in the missilersquos dragdecrease especially when the weight of the missile gravity
in the direction of the velocity is over the drag force that isminus119902119878119862119909minus 119898119892 sin 120579 gt 0 and it is concluded that the speed of
the missile will increase and not decrease Consequently toprevent this from happening the inequation can be supposedas
Δ120572 sin120596119905 + Δ120573 cos120596119905 gt 0 (35)
which gives
radicΔ1205722+ Δ1205732 sin (120596119905 + 120596
0) gt 0 (36)
where 1205960is equal to acos(Δ120572radicΔ120572
2+ Δ1205732)
In order to meet inequation (36) all along circularfrequency 120596 should satisfy
2120587119899 le 120596119905 + 1205960le 2120587119899 + 120587 119899 isin 119864 (37)
So2120587119899 minus 120596
0
119905
le 120596 le
2120587119899 + 120587 minus 1205960
119905
(38)
In view of the dynamic characteristics of the missile andthe performance of the actuator the bandwidth of the coiningmotion command must be less than that of the actuatorOtherwise it is difficult for the missile guidance system totrack the guidance commandThus the angular ratio 120596mustbe subject to 120596 lt 120596
119879 that is
2120587119899 + 120587 minus 1205960
119905
lt 120596119879
119899 = Round [120596119879119905 minus 120587 + 120596
0
2120587
] (39)
where 120596119879represents the bandwidth of the system
4 Simulation Example
In this section a simulation example of the velocity controlsystem by using coning motion technique is demonstratedfor a missile whose indexes include terminal speed terminalpath angle and miss distance In order to exhibit the velocitycontrol performance the conventional PN mode withoutthe coning motion and particle swarm optimization (PSO)approach are involved for comparing studyThe initial condi-tions that the missile makes coning motion are set as followsthe initial values of 119910 120579 119881 and Ψ
119881are set to be 119909(0) =
minus19 km 119910(0) = 10 km 120579(0) = minus20 deg 119881(0) = 500msand Ψ
119881(0) = 0 deg The initial position of the virtual target is
selected as (minus7292 9329 0)m besides the total flight time 119905119879
638 s The flight constraints are set as 120579low = minus30∘ 120579top = 30
∘119910low = 0 km 119910top = 10 km119881
119891= 250ms 120579
119891= minus25
∘ 120572down =minus20 deg 120572up = 20 deg 119886
119910down = minus50ms2 and 119886119910up = 50m
s2 Additionally the design process of PSO trajectory isreferred to [24] and the parameters of the adopted PSOmethod are 119898 = 50 119899 = 2 and 119888
1= 1198882= 18 Inertial weight
119908 is set to be reduced linearly from 10 to 04 and the searchwill be terminated if the fitness value is less than 04 or thenumber of iteration reaches 150
According to the above integrated design method forvelocity control and trajectory control the simulation results
8 Discrete Dynamics in Nature and Society
Table 1 Simulation results produced by different guidance laws
Guidance withvelocity control
Guidance withoutvelocity control
Optimizationtrajectory profile PSO trajectory profile
Final velocity (ms) 25409 28136 2550 2556Final flying path angle (deg) minus1565 minus2018 minus2146 minus2093Miss distance (m) 22 16 06 08
minus20minus15
minus10minus50
minus1minus05
005
1
0
2
4
6
8
10
x (km)
y(k
m)
z (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 6 3D curve of the flight trajectories with different modes
020
4060
80
minus10minus5
05
1015
minus10
minus5
0
5
10
15
B
A
Optimal trajectoryPSO trajectory
PN modeConing motion mode
t (s)
120572(d
eg)
120573 (deg)
Figure 7 History curve of the coning motion
are illustrated in Figures 6ndash13 Comparing the results of theoptimalmethod proposed in this paper with those of the PSOapproach it is concluded that the optimization solutions oftwo approaches are almost the same which implies the pre-sented direct discretizationmethod has sufficient precision ofoptimization stratifying the requirements of the constraintsas exhibited in Table 1
Additionally as the result shown in Figure 6 the velocitycontrol system has got the same normal control performance
minus15 minus10 minus5 0 5 10 15
minus10
minus5
0
5
10
A
B
120572(d
eg)
120573 (deg)
StartEnd
Figure 8 Variation of the nutation angle
minus20 minus15 minus10 minus5 0250
300
350
400
450
500
550
600
(m
s)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 9 Response of the velocity in different condition
to the conventional proportional navigation scheme FromFigures 7-8 where points A and B denote the start andend of the coning motion respectively the control systemimproves the magnitude amount of induced AOA whichmakes the missilersquos drag increase Therefore the speed of themissile decreases apparently in this period as illustrated in
Discrete Dynamics in Nature and Society 9
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120572(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 10 Variation of the angle of attack
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120573(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 11 Variation of the sideslip angle
Figure 9 Meanwhile Figures 10-11 indicate that the coningmotion control suspends at the range of 13 km and switchesinto the pure proportion guidance mode which suggeststhat the missile velocity is gradually moving to the indexof requirement because the magnitudes of the attack andsideslip angles are both getting smaller with the missileapproaching to the virtual target According to the path anglecurves outlined in Figures 12-13 it is helpful to suspendthe coning motion control before hitting the target becausethe coning motion reduces the tracking precision to theideal trajectory Finally as shown in Table 1 both guidancemodes meet the requirements of high guidance precision andterminal path angle but the coning motion control systemproduces lower amount of terminal velocity which is in linewith the desired velocity index
minus20 minus15 minus10 minus5 0minus40
minus35
minus30
minus25
minus20
minus15
minus10
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
120579(d
eg)
Figure 12 Curve of the trajectory inclination angle
minus20 minus15 minus10 minus5 0minus3
minus2
minus1
0
1
2
3
4
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
ΨV
(deg
)
Figure 13 Curve of the path angle versus range
5 Conclusions
In this paper a novel coning motion based guidance methodis proposed for the velocity control of missile system withterminal velocity constraint An ideal velocity profile is pre-sented by using nonlinear programming method in which avirtual moving target is put forward for missile to chase soas to perform the velocity control Moreover the dynamicinversion theory is applied to design the velocity controlsystem parameters To show the effectiveness of the controllaw comparative simulations of a missile in which pureproportional navigation mode has been taken into consid-eration are provided Simulation results demonstrate thatthe proposed velocity control law has a good performanceproviding reference to the design for velocity control system
10 Discrete Dynamics in Nature and Society
of the missileThe extensions of the presented coningmotioncontrol laws to a spinning missile and the inclusion of thedynamics in the velocity control system are possible areas offurther research
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Natural Science Founda-tion of China (NSFC) under Grant no 11176012 and theResearch Innovation Project for Graduate Student of Jiangsu-Provincial Ordinary University under Grant no KLYX15-0394
References
[1] K Enomoto T Yamasakiy H Taknoz and Y Baba ldquoA study ona velocity control system design using the dynamic inversionmethodrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference AIAA 2010-8204 Toronto Canada August2010
[2] V Istratie ldquoThree-dimensional optimal skip entrywith terminalmaximum velocityrdquo in Proceedings of the 22nd AtmosphericFlight Mechanics Conference AIAA 97-3483 New Orleans LaUSA August 1997
[3] A Saraf J A Leavitt D T Chen and K D Mease ldquoDesignand evaluation of an acceleration guidance algorithm for entryrdquoJournal of Spacecraft and Rockets vol 41 no 6 pp 986ndash9962004
[4] L Bruyere ldquoDynamic inversion for missile lateral velocity con-trol via polynomial eigenstructure assignmentrdquo in Proceedingsof the AIAA Guidance Navigation and Control Conference andExhibit Austin Tex USA August 2003
[5] D M Acosta and S S Joshi ldquoAdaptive nonlinear dynamicinversion control of an autonomous airship for the explorationof titanrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Hilton Head Island SC USAAugust 2007
[6] Y-X Jiang and J Cui ldquoEffectiveness of weaving maneuverstrategy of a missilerdquo Journal of Beijing University of Aeronauticsand Astronautics vol 28 no 2 pp 133ndash136 2002
[7] W H Curry and J F Reed ldquoMeasurement of Magnus effectson a sounding rocket model in a supersonic wind tunnelrdquo inProceedings of the Aerodynamic Testing Conference AmericanInstitute of Aeronautics and Astronautics Los Angeles CalifUSA September 1966
[8] X R Mao S X Yang and Y Xu ldquoConing motion stability ofwrap around fin rocketsrdquo Science in China Series E Technologi-cal Sciences vol 50 no 3 pp 343ndash350 2007
[9] J Morote and G Liano ldquoStability analysis and flight trials ofa clipped wrap around fin configurationrdquo in Proceedings ofthe Aiaa Atmospheric Flight Mechanics Conference and ExhibitAAAI 2004-5055 American Institute of Aeronautics andAstro-nautics Providence RI USA August 2004
[10] J Song ldquoA velocity control method of the reentry vehicle basedon flight simulationrdquoMissiles and Space Vehicles no 2 pp 5ndash72012
[11] FWang X Liu J Liang and X Fang ldquoVelocity control methodbased on terminal restraintrdquo Flight Dynamics vol 29 no 6 pp52ndash55 2011
[12] X R Mao S X Yang and Y Xu ldquoResearch on the coningmotion of wrap-around fin projectilesrdquo Canadian Aeronauticsand Space Journal vol 52 no 3 pp 119ndash125 2006
[13] K Y Li L Y Zhao andW Zhou ldquoStability of coning motion ofspinning rocket projectiles at high altituderdquo Journal ofDynamicsand Control vol 10 no 3 pp 239ndash243 2012
[14] X R Mao and S X Yang ldquoOptimal control of coning motionof spinning missilesrdquo Journal of Aerospace Engineering vol 28no 2 Article ID 04014068 pp 1ndash10 2015
[15] H-B Wang and J-S Wu ldquoConing motion of rockets itsnumerical simulation and restraintrdquo Transaction of BeijingInstitute of Technology vol 27 no 3 pp 196ndash199 2007
[16] P K A Menon V H L Cheng C A Lin and M MBriggs ldquoHigh-performance missile synthesis with trajectoryand propulsion system optimizationrdquo Journal of Spacecraft andRockets vol 24 no 6 pp 552ndash557 1987
[17] X-P Bai Y-H Zhao and Y-N Liu ldquoA novel approach tostudy real-time dynamic optimization analysis and simulationcomplex mine logistics transportation hybrid system with beltand surge linksrdquo Discrete Dynamics in Nature and Society vol2015 Article ID 601578 8 pages 2015
[18] J T Betts Practical Methods for Optimal Control Using Nonlin-ear Programming SIAM 1st edition 2001
[19] F Fahroo and I M Ross ldquoCostate estimation by a Legendrepseudospectral methodrdquo Journal of Guidance Control andDynamics vol 24 no 2 pp 270ndash277 2001
[20] M M Khader N H Sweilam and W Y Kota ldquoCardinalfunctions for Legendre pseudo-spectral method for solving theintegro-differential equationsrdquo Journal of the Egyptian Mathe-matical Society vol 22 no 3 pp 511ndash516 2014
[21] C L Darby W W Hager and A V Rao ldquoDirect trajectoryoptimization using a variable low-order adaptive pseudospec-tral methodrdquo Journal of Spacecraft and Rockets vol 48 no 3pp 433ndash445 2011
[22] A Wachter and L T Biegler ldquoOn the implementation ofan interior-point filter line-search algorithm for large-scalenonlinear programmingrdquoMathematical Programming vol 106no 1 pp 25ndash57 2006
[23] L Bruyere B A Whitey and A Tsourdos ldquoDynamic inversionformissile lateral velocity control via polynomial eigenstructureassignmentrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference and Exhibit AIAA 2003-5792 AustinTex USA August 2003
[24] R S Sun C Ming and C J Sun ldquoTrajectory optimizationdesign for morphing wing missilerdquo Journal of Harbin Instituteof Technology vol 22 no 5 pp 48ndash53 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 5
(xT0 yT0)
VT0
T
M
A
O
VT
VM
xT y
xVTflowast
Figure 3 Kinematical relationship of the missile and the virtualtarget
of the velocity control Therefore a virtual target proposedhere is to afford a possibility of velocity control for themissileConcretely a virtual target is designed tomove exactly like theideal movement of the missile that is to move strictly alongthe standard optimized trajectory 1006704AOwith the same speed tothe velocity profile If a control design is developed to makethe missile precisely chase the virtual target the requirementof the velocity will be naturally satisfied for the missile flyingalong the ideal trajectory Thus in terms of the longitudinalplane of the kinematics described in Figure 3 all parametersof the position (119909
119879 119910119879) and velocity 119881
119879including initial
position (1199091198790 1199101198790) ideal initial velocity 119881
1198790 and anticipant
terminal velocity 119881119879119891lowast can be obtained from the information
of the optimized trajectory
33 Velocity Control Methodology Figure 4 depicts the totalcontrol flow of the coning motion control It is known thatthe desired initial velocity119881
1198720lowast (start from point A shown in
Figure 3) can be conducted by using the above hp-adaptivepseudospectral trajectory optimization method for decidingwhether the coning motion is need Besides in considerationof the influence of the control dynamics to the velocity theconing motion will be made to descent of the flight velocitywhen real velocity 119881
1198720is more than 11 119881
1198720lowast
Obviously the relative velocity and distance between themissile and the virtual target can be written as Δ119881 = 119881
119872minus119881119879
and Δ119877 = 119877119879minus 119877119872 respectively Here let Δ119877 be larger
than zero when the target moves in front of the missile Ifthe missile motion satisfies the condition of Δ119877 gt 0 or119881119872
lt 119881119879 the terminal velocity will surely meet the index
constraint Thus the velocity control system can be built upin accordance with the relationship of the relative distanceand speed between the missile and the virtual target (seeFigure 5) Then the velocity control law can be formulatedas
119886119909119888
= 119891 (Δ119881 Δ119877) = 119870119877(Δ119877 minus Δ119877
119905) + 119870119881(119881119879minus 119881119872) (11)
where Δ119877119905is the desired distance between the missile and
the virtual target and 119870119877and 119870
119881denote the velocity control
gainsFor the sake of convenience of analysis it is good to
suppose the anticipant distance between the missile and
NoSuspend coning motion
Restart coning motionGuidance withconing motion
Yes
Proportionalguidance
No
Start
No Coning motionend
Need decelerationMissilemotion
Yes
Yes
Δayc Δazc
ayc azc
Proportionalguidance
VM0 gt 11 middot VM0lowast
VM gt VTlowast
Figure 4 Control flow chart of the coning motion control
1
s
1
s
+
+
+
minus
minus
VTKV
KR
ΔR ΔRt
VM
axc
Figure 5 Velocity control structure of the missile
the virtual target to be 0 that isΔ119877119905= 0Therefore the veloc-
ity control law will be simplified as
119891 (Δ119881 Δ119877) = 119870119877Δ119877 + 119870
119881Δ119881 (12)
If the missile overlaps at the position of virtual targetfor example 119891(Δ119881 Δ119877) = 0 Δ119881 = 0 Δ119877 = 0 theindex of terminal velocity is satisfied naturally Moreover if119891(Δ119881 Δ119877) lt 0 there are two circumstances (1) the missilemoves in back of the virtual target and (2) the missile is infront of the virtual target but the speedmagnitude is less thanthat of virtual target Since the virtual target moves along theideal flight trajectory all over the circumstances of (1) and(2) will both satisfy the terminal velocity index Additionallythe kinetic energy of the missile is unnecessarily large when119891(Δ119881 Δ119877) gt 0 which will result in the missile decelerationby coning motion
Consequently the cost function 119891(Δ119881 Δ119877) determineswhether the velocity control is required For example if119891(Δ119881 Δ119877) is less than zero the missile coningmotion shouldbe paused and the proportional navigation guidance to
6 Discrete Dynamics in Nature and Society
the target should be switched on as well Otherwise if119891(Δ119881 Δ119877) is greater than zero the coning motion will berestarted
According to the control structure of themissile dynamicinversion theory [23] can be used to design the controlparameters 119870
119877and 119870
119881 The equation related to the velocity
shown in Figure 3 is expressed as
119898119872
= minus119902119878119862119909minus 119898119892 sin 120579 (13)
Replacing 119872with 119886
119909119888gives
119886119909119888
=
minus119902119878119862119909
119898
minus 119892 sin 120579 (14)
From the velocity control structure outlined in Figure 4transfer function 119881
119879to 119881119872becomes
119882(119904) =
119881119872 (119904)
119881119879 (
119904)
=
119870119881119904 + 119870119877
1199042+ 119870119881119904 + 119870119877
(15)
where the 2nd-order characteristic equation is
1199042+ 119870119881119904 + 119870119877= 0 (16)
Control gains 119870119881and 119870
119877are determined such that 119881
119872
may become its desiring velocity 119881119879 Apparently from the
linear system theory the stability of the system is ascertainedby the pole points and the system is stable only when all polepoints are located at the left of 119904 plane
(1) If 1198702119881
ge 4119870119877 since 119870
119881and 119870
119877are both over zero
the two characteristic roots of the system will be bothminus real numbers which can be written as
11990412
=
minus119870119881plusmn radic119870
2
119881minus 4119870119877
2
(17)
(2) If 1198702119881lt 4119870119877 11990412
changes to
11990412
=
minus119870119881plusmn 119894radic4119870
119877minus 1198702
119881
2
(18)
Apparently the nearer pole to the imaginary axis pri-marily determines the speed of output response of the abovesystem Therefore if the poles 119904
12have the same minus real
part that is when 1198702
119881le 4119870
119877 it is possible to obtain the
fastest output response Synchronously the imaginary partof the characteristic roots determines the magnitude of theovershoot In general the relative damping value of system isoptimally set toradic22 and then the equation
radic4119870119877minus 1198702
119881
119870119881
=
radic2
2
(19)
gives
119870119877=
3
8
1198702
119881 (20)
Let 119881119879(119904) = 1119904 substituting it into transfer function (15)
yields
119881119872 (119904) =
1
119904
sdot
119870119881119904 + 119870119877
1199042+ 119870119881119904 + 119870119877
=
1
119904
minus
1
119904 + 05119870119881
+
05119870119881
(119904 + 05119870119881)2
(21)
which can be described in the time-domain form by applyingLaplace inverse transform that is
119881119872 (119905) = 1 + 119890
minus05119870119881sdot119905(05119870
119881sdot 119905 minus 1) (22)
Besides by differentiating (22) it becomes
dd119905119881119872 (119905) =
1
2
119870119881119890minus(12)119870119881sdot119905
(2 minus
1
2
119870119881119905) (23)
Let (dd119905)119881119872(119905) = 0 and the settling time of the system can
be given as
119879119901=
4
119870119881
(24)
In order to ensure the performance of the system thesettling time 119879
119901is generally set to the triple of the time
constant of the missile 119879119889 namely
119879119901= 3119879119889 (25)
By combining (20) (24) and (25) the solution to thevelocity control law is
119870119881=
4
3119879119889
119870119877=
3
8
1198702
119881
(26)
When the missile does pure coning motion the acceler-ation commands in longitudinal and lateral plane 119886
120575119910119888and
119886120575119911119888
are
119886120575119910119888
= 119886120575sin120596119905
119886120575119911119888
= 119886120575cos120596119905
(27)
where 120596 represents a circular frequency and 119886120575is the accel-
eration command corresponding to command of AOA 120575 incondition of the pure coning motion
In accordance with the velocity control law shown in (12)drag force command119883
119888can be acquired as
minus119883119888= 119898119886119909119888+ 119898119892 sin 120579 (28)
which gives the lift force command
119884119888= 119901119883119888= 119901 sdot (119898119886
119909119888+ 119898119892 sin 120579) (29)
where 119901means lift-drag ratio So
119886120575=
119884119888
119898
=
119901119883119888
119898
=
119901 sdot (119898119886119909119888+ 119898119892 sin 120579)119898
asymp 119901 (119870119881Δ119881 + 119870
119877Δ119877)
(30)
Discrete Dynamics in Nature and Society 7
34 Integrated Design for Velocity Control and TrajectoryControl On the other hand in order to make the missile hitthe target precisely it is necessary to design an appropriatecontrol law under which the normal acceleration 119886
119898can be
formulated with the relative motion between the missile andthe target as follows
119886119898= 119891 (119903 120585) (31)
where 119903 denotes directive distance betweenmissile and targetand 120585 is angle of line-of-sight (LOS)
Traditional control laws are determined to approach theconvergence of the distance and the LOS rate between themissile and the target For instance in terms of classicproportional navigation (PN) method it is concluded thatmissile acceleration commands 119886
119898are in proportion to the
rate of LOS 120585
From (27) the integrated guidance commands can bewritten as follows
119886119910119888
= Δ119886119910119888+ 119886120575sin120596119905
119886119911119888= Δ119886119911119888+ 119886120575cos120596119905
(32)
where Δ119886119910119888
and Δ119886119911119888
denote the normal PN commands inlongitudinal and lateral plane respectively
As given in (32) if the velocity meets the anticipantrequirement that is 119886
120575= 0 the missile will stop coning
motion andwill fly through the proportion guidance law so asto hit the target accurately Otherwise the missile will do theconingmotion whichmakes a continuous alternate changingbetween the angle of attack 120575 sin120596119905 and sideslip angle120575 cos120596119905 respectively In an alternating cycle the equivalentlift force produced by the alternate AOA is equal to zero andthe same to the side force That is to say only the drag forceincreases during the period of coning motion
Additionally consistent with the normal control com-mands Δ119886
119910119888and Δ119886
119911119888 the total AOA of the missile can be
given as
Δ = radic1205722+ 1205732
= radic(Δ120572 + 120575 sin120596119905)2 + (Δ120573 + 120575 cos120596119905)2
= radicΔ1205722+ Δ1205732+ ℎ (120575 Δ120572 Δ120573) + 120575
2
(33)
where 120573 represents sideslip angle and ℎ(120575 Δ120572 Δ120573) =
2120575(Δ120572 sin120596119905 + Δ120573 cos120596119905)From (33) if the missile flies without coning motion that
is 120575 = 0 the total AOA will be simplified as
Δ = radicΔ1205722+ Δ1205732 (34)
Since ℎ(120575 Δ120572 Δ120573) changes periodically with time asshown in (33) it is possible that the missile with coningmotion produces less total AOA than that without coningmotion when the item ℎ(120575 Δ120572 Δ120573) + 120575
2lt 0 That is to
say coning motion control results in the missilersquos dragdecrease especially when the weight of the missile gravity
in the direction of the velocity is over the drag force that isminus119902119878119862119909minus 119898119892 sin 120579 gt 0 and it is concluded that the speed of
the missile will increase and not decrease Consequently toprevent this from happening the inequation can be supposedas
Δ120572 sin120596119905 + Δ120573 cos120596119905 gt 0 (35)
which gives
radicΔ1205722+ Δ1205732 sin (120596119905 + 120596
0) gt 0 (36)
where 1205960is equal to acos(Δ120572radicΔ120572
2+ Δ1205732)
In order to meet inequation (36) all along circularfrequency 120596 should satisfy
2120587119899 le 120596119905 + 1205960le 2120587119899 + 120587 119899 isin 119864 (37)
So2120587119899 minus 120596
0
119905
le 120596 le
2120587119899 + 120587 minus 1205960
119905
(38)
In view of the dynamic characteristics of the missile andthe performance of the actuator the bandwidth of the coiningmotion command must be less than that of the actuatorOtherwise it is difficult for the missile guidance system totrack the guidance commandThus the angular ratio 120596mustbe subject to 120596 lt 120596
119879 that is
2120587119899 + 120587 minus 1205960
119905
lt 120596119879
119899 = Round [120596119879119905 minus 120587 + 120596
0
2120587
] (39)
where 120596119879represents the bandwidth of the system
4 Simulation Example
In this section a simulation example of the velocity controlsystem by using coning motion technique is demonstratedfor a missile whose indexes include terminal speed terminalpath angle and miss distance In order to exhibit the velocitycontrol performance the conventional PN mode withoutthe coning motion and particle swarm optimization (PSO)approach are involved for comparing studyThe initial condi-tions that the missile makes coning motion are set as followsthe initial values of 119910 120579 119881 and Ψ
119881are set to be 119909(0) =
minus19 km 119910(0) = 10 km 120579(0) = minus20 deg 119881(0) = 500msand Ψ
119881(0) = 0 deg The initial position of the virtual target is
selected as (minus7292 9329 0)m besides the total flight time 119905119879
638 s The flight constraints are set as 120579low = minus30∘ 120579top = 30
∘119910low = 0 km 119910top = 10 km119881
119891= 250ms 120579
119891= minus25
∘ 120572down =minus20 deg 120572up = 20 deg 119886
119910down = minus50ms2 and 119886119910up = 50m
s2 Additionally the design process of PSO trajectory isreferred to [24] and the parameters of the adopted PSOmethod are 119898 = 50 119899 = 2 and 119888
1= 1198882= 18 Inertial weight
119908 is set to be reduced linearly from 10 to 04 and the searchwill be terminated if the fitness value is less than 04 or thenumber of iteration reaches 150
According to the above integrated design method forvelocity control and trajectory control the simulation results
8 Discrete Dynamics in Nature and Society
Table 1 Simulation results produced by different guidance laws
Guidance withvelocity control
Guidance withoutvelocity control
Optimizationtrajectory profile PSO trajectory profile
Final velocity (ms) 25409 28136 2550 2556Final flying path angle (deg) minus1565 minus2018 minus2146 minus2093Miss distance (m) 22 16 06 08
minus20minus15
minus10minus50
minus1minus05
005
1
0
2
4
6
8
10
x (km)
y(k
m)
z (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 6 3D curve of the flight trajectories with different modes
020
4060
80
minus10minus5
05
1015
minus10
minus5
0
5
10
15
B
A
Optimal trajectoryPSO trajectory
PN modeConing motion mode
t (s)
120572(d
eg)
120573 (deg)
Figure 7 History curve of the coning motion
are illustrated in Figures 6ndash13 Comparing the results of theoptimalmethod proposed in this paper with those of the PSOapproach it is concluded that the optimization solutions oftwo approaches are almost the same which implies the pre-sented direct discretizationmethod has sufficient precision ofoptimization stratifying the requirements of the constraintsas exhibited in Table 1
Additionally as the result shown in Figure 6 the velocitycontrol system has got the same normal control performance
minus15 minus10 minus5 0 5 10 15
minus10
minus5
0
5
10
A
B
120572(d
eg)
120573 (deg)
StartEnd
Figure 8 Variation of the nutation angle
minus20 minus15 minus10 minus5 0250
300
350
400
450
500
550
600
(m
s)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 9 Response of the velocity in different condition
to the conventional proportional navigation scheme FromFigures 7-8 where points A and B denote the start andend of the coning motion respectively the control systemimproves the magnitude amount of induced AOA whichmakes the missilersquos drag increase Therefore the speed of themissile decreases apparently in this period as illustrated in
Discrete Dynamics in Nature and Society 9
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120572(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 10 Variation of the angle of attack
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120573(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 11 Variation of the sideslip angle
Figure 9 Meanwhile Figures 10-11 indicate that the coningmotion control suspends at the range of 13 km and switchesinto the pure proportion guidance mode which suggeststhat the missile velocity is gradually moving to the indexof requirement because the magnitudes of the attack andsideslip angles are both getting smaller with the missileapproaching to the virtual target According to the path anglecurves outlined in Figures 12-13 it is helpful to suspendthe coning motion control before hitting the target becausethe coning motion reduces the tracking precision to theideal trajectory Finally as shown in Table 1 both guidancemodes meet the requirements of high guidance precision andterminal path angle but the coning motion control systemproduces lower amount of terminal velocity which is in linewith the desired velocity index
minus20 minus15 minus10 minus5 0minus40
minus35
minus30
minus25
minus20
minus15
minus10
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
120579(d
eg)
Figure 12 Curve of the trajectory inclination angle
minus20 minus15 minus10 minus5 0minus3
minus2
minus1
0
1
2
3
4
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
ΨV
(deg
)
Figure 13 Curve of the path angle versus range
5 Conclusions
In this paper a novel coning motion based guidance methodis proposed for the velocity control of missile system withterminal velocity constraint An ideal velocity profile is pre-sented by using nonlinear programming method in which avirtual moving target is put forward for missile to chase soas to perform the velocity control Moreover the dynamicinversion theory is applied to design the velocity controlsystem parameters To show the effectiveness of the controllaw comparative simulations of a missile in which pureproportional navigation mode has been taken into consid-eration are provided Simulation results demonstrate thatthe proposed velocity control law has a good performanceproviding reference to the design for velocity control system
10 Discrete Dynamics in Nature and Society
of the missileThe extensions of the presented coningmotioncontrol laws to a spinning missile and the inclusion of thedynamics in the velocity control system are possible areas offurther research
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Natural Science Founda-tion of China (NSFC) under Grant no 11176012 and theResearch Innovation Project for Graduate Student of Jiangsu-Provincial Ordinary University under Grant no KLYX15-0394
References
[1] K Enomoto T Yamasakiy H Taknoz and Y Baba ldquoA study ona velocity control system design using the dynamic inversionmethodrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference AIAA 2010-8204 Toronto Canada August2010
[2] V Istratie ldquoThree-dimensional optimal skip entrywith terminalmaximum velocityrdquo in Proceedings of the 22nd AtmosphericFlight Mechanics Conference AIAA 97-3483 New Orleans LaUSA August 1997
[3] A Saraf J A Leavitt D T Chen and K D Mease ldquoDesignand evaluation of an acceleration guidance algorithm for entryrdquoJournal of Spacecraft and Rockets vol 41 no 6 pp 986ndash9962004
[4] L Bruyere ldquoDynamic inversion for missile lateral velocity con-trol via polynomial eigenstructure assignmentrdquo in Proceedingsof the AIAA Guidance Navigation and Control Conference andExhibit Austin Tex USA August 2003
[5] D M Acosta and S S Joshi ldquoAdaptive nonlinear dynamicinversion control of an autonomous airship for the explorationof titanrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Hilton Head Island SC USAAugust 2007
[6] Y-X Jiang and J Cui ldquoEffectiveness of weaving maneuverstrategy of a missilerdquo Journal of Beijing University of Aeronauticsand Astronautics vol 28 no 2 pp 133ndash136 2002
[7] W H Curry and J F Reed ldquoMeasurement of Magnus effectson a sounding rocket model in a supersonic wind tunnelrdquo inProceedings of the Aerodynamic Testing Conference AmericanInstitute of Aeronautics and Astronautics Los Angeles CalifUSA September 1966
[8] X R Mao S X Yang and Y Xu ldquoConing motion stability ofwrap around fin rocketsrdquo Science in China Series E Technologi-cal Sciences vol 50 no 3 pp 343ndash350 2007
[9] J Morote and G Liano ldquoStability analysis and flight trials ofa clipped wrap around fin configurationrdquo in Proceedings ofthe Aiaa Atmospheric Flight Mechanics Conference and ExhibitAAAI 2004-5055 American Institute of Aeronautics andAstro-nautics Providence RI USA August 2004
[10] J Song ldquoA velocity control method of the reentry vehicle basedon flight simulationrdquoMissiles and Space Vehicles no 2 pp 5ndash72012
[11] FWang X Liu J Liang and X Fang ldquoVelocity control methodbased on terminal restraintrdquo Flight Dynamics vol 29 no 6 pp52ndash55 2011
[12] X R Mao S X Yang and Y Xu ldquoResearch on the coningmotion of wrap-around fin projectilesrdquo Canadian Aeronauticsand Space Journal vol 52 no 3 pp 119ndash125 2006
[13] K Y Li L Y Zhao andW Zhou ldquoStability of coning motion ofspinning rocket projectiles at high altituderdquo Journal ofDynamicsand Control vol 10 no 3 pp 239ndash243 2012
[14] X R Mao and S X Yang ldquoOptimal control of coning motionof spinning missilesrdquo Journal of Aerospace Engineering vol 28no 2 Article ID 04014068 pp 1ndash10 2015
[15] H-B Wang and J-S Wu ldquoConing motion of rockets itsnumerical simulation and restraintrdquo Transaction of BeijingInstitute of Technology vol 27 no 3 pp 196ndash199 2007
[16] P K A Menon V H L Cheng C A Lin and M MBriggs ldquoHigh-performance missile synthesis with trajectoryand propulsion system optimizationrdquo Journal of Spacecraft andRockets vol 24 no 6 pp 552ndash557 1987
[17] X-P Bai Y-H Zhao and Y-N Liu ldquoA novel approach tostudy real-time dynamic optimization analysis and simulationcomplex mine logistics transportation hybrid system with beltand surge linksrdquo Discrete Dynamics in Nature and Society vol2015 Article ID 601578 8 pages 2015
[18] J T Betts Practical Methods for Optimal Control Using Nonlin-ear Programming SIAM 1st edition 2001
[19] F Fahroo and I M Ross ldquoCostate estimation by a Legendrepseudospectral methodrdquo Journal of Guidance Control andDynamics vol 24 no 2 pp 270ndash277 2001
[20] M M Khader N H Sweilam and W Y Kota ldquoCardinalfunctions for Legendre pseudo-spectral method for solving theintegro-differential equationsrdquo Journal of the Egyptian Mathe-matical Society vol 22 no 3 pp 511ndash516 2014
[21] C L Darby W W Hager and A V Rao ldquoDirect trajectoryoptimization using a variable low-order adaptive pseudospec-tral methodrdquo Journal of Spacecraft and Rockets vol 48 no 3pp 433ndash445 2011
[22] A Wachter and L T Biegler ldquoOn the implementation ofan interior-point filter line-search algorithm for large-scalenonlinear programmingrdquoMathematical Programming vol 106no 1 pp 25ndash57 2006
[23] L Bruyere B A Whitey and A Tsourdos ldquoDynamic inversionformissile lateral velocity control via polynomial eigenstructureassignmentrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference and Exhibit AIAA 2003-5792 AustinTex USA August 2003
[24] R S Sun C Ming and C J Sun ldquoTrajectory optimizationdesign for morphing wing missilerdquo Journal of Harbin Instituteof Technology vol 22 no 5 pp 48ndash53 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Discrete Dynamics in Nature and Society
the target should be switched on as well Otherwise if119891(Δ119881 Δ119877) is greater than zero the coning motion will berestarted
According to the control structure of themissile dynamicinversion theory [23] can be used to design the controlparameters 119870
119877and 119870
119881 The equation related to the velocity
shown in Figure 3 is expressed as
119898119872
= minus119902119878119862119909minus 119898119892 sin 120579 (13)
Replacing 119872with 119886
119909119888gives
119886119909119888
=
minus119902119878119862119909
119898
minus 119892 sin 120579 (14)
From the velocity control structure outlined in Figure 4transfer function 119881
119879to 119881119872becomes
119882(119904) =
119881119872 (119904)
119881119879 (
119904)
=
119870119881119904 + 119870119877
1199042+ 119870119881119904 + 119870119877
(15)
where the 2nd-order characteristic equation is
1199042+ 119870119881119904 + 119870119877= 0 (16)
Control gains 119870119881and 119870
119877are determined such that 119881
119872
may become its desiring velocity 119881119879 Apparently from the
linear system theory the stability of the system is ascertainedby the pole points and the system is stable only when all polepoints are located at the left of 119904 plane
(1) If 1198702119881
ge 4119870119877 since 119870
119881and 119870
119877are both over zero
the two characteristic roots of the system will be bothminus real numbers which can be written as
11990412
=
minus119870119881plusmn radic119870
2
119881minus 4119870119877
2
(17)
(2) If 1198702119881lt 4119870119877 11990412
changes to
11990412
=
minus119870119881plusmn 119894radic4119870
119877minus 1198702
119881
2
(18)
Apparently the nearer pole to the imaginary axis pri-marily determines the speed of output response of the abovesystem Therefore if the poles 119904
12have the same minus real
part that is when 1198702
119881le 4119870
119877 it is possible to obtain the
fastest output response Synchronously the imaginary partof the characteristic roots determines the magnitude of theovershoot In general the relative damping value of system isoptimally set toradic22 and then the equation
radic4119870119877minus 1198702
119881
119870119881
=
radic2
2
(19)
gives
119870119877=
3
8
1198702
119881 (20)
Let 119881119879(119904) = 1119904 substituting it into transfer function (15)
yields
119881119872 (119904) =
1
119904
sdot
119870119881119904 + 119870119877
1199042+ 119870119881119904 + 119870119877
=
1
119904
minus
1
119904 + 05119870119881
+
05119870119881
(119904 + 05119870119881)2
(21)
which can be described in the time-domain form by applyingLaplace inverse transform that is
119881119872 (119905) = 1 + 119890
minus05119870119881sdot119905(05119870
119881sdot 119905 minus 1) (22)
Besides by differentiating (22) it becomes
dd119905119881119872 (119905) =
1
2
119870119881119890minus(12)119870119881sdot119905
(2 minus
1
2
119870119881119905) (23)
Let (dd119905)119881119872(119905) = 0 and the settling time of the system can
be given as
119879119901=
4
119870119881
(24)
In order to ensure the performance of the system thesettling time 119879
119901is generally set to the triple of the time
constant of the missile 119879119889 namely
119879119901= 3119879119889 (25)
By combining (20) (24) and (25) the solution to thevelocity control law is
119870119881=
4
3119879119889
119870119877=
3
8
1198702
119881
(26)
When the missile does pure coning motion the acceler-ation commands in longitudinal and lateral plane 119886
120575119910119888and
119886120575119911119888
are
119886120575119910119888
= 119886120575sin120596119905
119886120575119911119888
= 119886120575cos120596119905
(27)
where 120596 represents a circular frequency and 119886120575is the accel-
eration command corresponding to command of AOA 120575 incondition of the pure coning motion
In accordance with the velocity control law shown in (12)drag force command119883
119888can be acquired as
minus119883119888= 119898119886119909119888+ 119898119892 sin 120579 (28)
which gives the lift force command
119884119888= 119901119883119888= 119901 sdot (119898119886
119909119888+ 119898119892 sin 120579) (29)
where 119901means lift-drag ratio So
119886120575=
119884119888
119898
=
119901119883119888
119898
=
119901 sdot (119898119886119909119888+ 119898119892 sin 120579)119898
asymp 119901 (119870119881Δ119881 + 119870
119877Δ119877)
(30)
Discrete Dynamics in Nature and Society 7
34 Integrated Design for Velocity Control and TrajectoryControl On the other hand in order to make the missile hitthe target precisely it is necessary to design an appropriatecontrol law under which the normal acceleration 119886
119898can be
formulated with the relative motion between the missile andthe target as follows
119886119898= 119891 (119903 120585) (31)
where 119903 denotes directive distance betweenmissile and targetand 120585 is angle of line-of-sight (LOS)
Traditional control laws are determined to approach theconvergence of the distance and the LOS rate between themissile and the target For instance in terms of classicproportional navigation (PN) method it is concluded thatmissile acceleration commands 119886
119898are in proportion to the
rate of LOS 120585
From (27) the integrated guidance commands can bewritten as follows
119886119910119888
= Δ119886119910119888+ 119886120575sin120596119905
119886119911119888= Δ119886119911119888+ 119886120575cos120596119905
(32)
where Δ119886119910119888
and Δ119886119911119888
denote the normal PN commands inlongitudinal and lateral plane respectively
As given in (32) if the velocity meets the anticipantrequirement that is 119886
120575= 0 the missile will stop coning
motion andwill fly through the proportion guidance law so asto hit the target accurately Otherwise the missile will do theconingmotion whichmakes a continuous alternate changingbetween the angle of attack 120575 sin120596119905 and sideslip angle120575 cos120596119905 respectively In an alternating cycle the equivalentlift force produced by the alternate AOA is equal to zero andthe same to the side force That is to say only the drag forceincreases during the period of coning motion
Additionally consistent with the normal control com-mands Δ119886
119910119888and Δ119886
119911119888 the total AOA of the missile can be
given as
Δ = radic1205722+ 1205732
= radic(Δ120572 + 120575 sin120596119905)2 + (Δ120573 + 120575 cos120596119905)2
= radicΔ1205722+ Δ1205732+ ℎ (120575 Δ120572 Δ120573) + 120575
2
(33)
where 120573 represents sideslip angle and ℎ(120575 Δ120572 Δ120573) =
2120575(Δ120572 sin120596119905 + Δ120573 cos120596119905)From (33) if the missile flies without coning motion that
is 120575 = 0 the total AOA will be simplified as
Δ = radicΔ1205722+ Δ1205732 (34)
Since ℎ(120575 Δ120572 Δ120573) changes periodically with time asshown in (33) it is possible that the missile with coningmotion produces less total AOA than that without coningmotion when the item ℎ(120575 Δ120572 Δ120573) + 120575
2lt 0 That is to
say coning motion control results in the missilersquos dragdecrease especially when the weight of the missile gravity
in the direction of the velocity is over the drag force that isminus119902119878119862119909minus 119898119892 sin 120579 gt 0 and it is concluded that the speed of
the missile will increase and not decrease Consequently toprevent this from happening the inequation can be supposedas
Δ120572 sin120596119905 + Δ120573 cos120596119905 gt 0 (35)
which gives
radicΔ1205722+ Δ1205732 sin (120596119905 + 120596
0) gt 0 (36)
where 1205960is equal to acos(Δ120572radicΔ120572
2+ Δ1205732)
In order to meet inequation (36) all along circularfrequency 120596 should satisfy
2120587119899 le 120596119905 + 1205960le 2120587119899 + 120587 119899 isin 119864 (37)
So2120587119899 minus 120596
0
119905
le 120596 le
2120587119899 + 120587 minus 1205960
119905
(38)
In view of the dynamic characteristics of the missile andthe performance of the actuator the bandwidth of the coiningmotion command must be less than that of the actuatorOtherwise it is difficult for the missile guidance system totrack the guidance commandThus the angular ratio 120596mustbe subject to 120596 lt 120596
119879 that is
2120587119899 + 120587 minus 1205960
119905
lt 120596119879
119899 = Round [120596119879119905 minus 120587 + 120596
0
2120587
] (39)
where 120596119879represents the bandwidth of the system
4 Simulation Example
In this section a simulation example of the velocity controlsystem by using coning motion technique is demonstratedfor a missile whose indexes include terminal speed terminalpath angle and miss distance In order to exhibit the velocitycontrol performance the conventional PN mode withoutthe coning motion and particle swarm optimization (PSO)approach are involved for comparing studyThe initial condi-tions that the missile makes coning motion are set as followsthe initial values of 119910 120579 119881 and Ψ
119881are set to be 119909(0) =
minus19 km 119910(0) = 10 km 120579(0) = minus20 deg 119881(0) = 500msand Ψ
119881(0) = 0 deg The initial position of the virtual target is
selected as (minus7292 9329 0)m besides the total flight time 119905119879
638 s The flight constraints are set as 120579low = minus30∘ 120579top = 30
∘119910low = 0 km 119910top = 10 km119881
119891= 250ms 120579
119891= minus25
∘ 120572down =minus20 deg 120572up = 20 deg 119886
119910down = minus50ms2 and 119886119910up = 50m
s2 Additionally the design process of PSO trajectory isreferred to [24] and the parameters of the adopted PSOmethod are 119898 = 50 119899 = 2 and 119888
1= 1198882= 18 Inertial weight
119908 is set to be reduced linearly from 10 to 04 and the searchwill be terminated if the fitness value is less than 04 or thenumber of iteration reaches 150
According to the above integrated design method forvelocity control and trajectory control the simulation results
8 Discrete Dynamics in Nature and Society
Table 1 Simulation results produced by different guidance laws
Guidance withvelocity control
Guidance withoutvelocity control
Optimizationtrajectory profile PSO trajectory profile
Final velocity (ms) 25409 28136 2550 2556Final flying path angle (deg) minus1565 minus2018 minus2146 minus2093Miss distance (m) 22 16 06 08
minus20minus15
minus10minus50
minus1minus05
005
1
0
2
4
6
8
10
x (km)
y(k
m)
z (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 6 3D curve of the flight trajectories with different modes
020
4060
80
minus10minus5
05
1015
minus10
minus5
0
5
10
15
B
A
Optimal trajectoryPSO trajectory
PN modeConing motion mode
t (s)
120572(d
eg)
120573 (deg)
Figure 7 History curve of the coning motion
are illustrated in Figures 6ndash13 Comparing the results of theoptimalmethod proposed in this paper with those of the PSOapproach it is concluded that the optimization solutions oftwo approaches are almost the same which implies the pre-sented direct discretizationmethod has sufficient precision ofoptimization stratifying the requirements of the constraintsas exhibited in Table 1
Additionally as the result shown in Figure 6 the velocitycontrol system has got the same normal control performance
minus15 minus10 minus5 0 5 10 15
minus10
minus5
0
5
10
A
B
120572(d
eg)
120573 (deg)
StartEnd
Figure 8 Variation of the nutation angle
minus20 minus15 minus10 minus5 0250
300
350
400
450
500
550
600
(m
s)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 9 Response of the velocity in different condition
to the conventional proportional navigation scheme FromFigures 7-8 where points A and B denote the start andend of the coning motion respectively the control systemimproves the magnitude amount of induced AOA whichmakes the missilersquos drag increase Therefore the speed of themissile decreases apparently in this period as illustrated in
Discrete Dynamics in Nature and Society 9
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120572(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 10 Variation of the angle of attack
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120573(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 11 Variation of the sideslip angle
Figure 9 Meanwhile Figures 10-11 indicate that the coningmotion control suspends at the range of 13 km and switchesinto the pure proportion guidance mode which suggeststhat the missile velocity is gradually moving to the indexof requirement because the magnitudes of the attack andsideslip angles are both getting smaller with the missileapproaching to the virtual target According to the path anglecurves outlined in Figures 12-13 it is helpful to suspendthe coning motion control before hitting the target becausethe coning motion reduces the tracking precision to theideal trajectory Finally as shown in Table 1 both guidancemodes meet the requirements of high guidance precision andterminal path angle but the coning motion control systemproduces lower amount of terminal velocity which is in linewith the desired velocity index
minus20 minus15 minus10 minus5 0minus40
minus35
minus30
minus25
minus20
minus15
minus10
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
120579(d
eg)
Figure 12 Curve of the trajectory inclination angle
minus20 minus15 minus10 minus5 0minus3
minus2
minus1
0
1
2
3
4
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
ΨV
(deg
)
Figure 13 Curve of the path angle versus range
5 Conclusions
In this paper a novel coning motion based guidance methodis proposed for the velocity control of missile system withterminal velocity constraint An ideal velocity profile is pre-sented by using nonlinear programming method in which avirtual moving target is put forward for missile to chase soas to perform the velocity control Moreover the dynamicinversion theory is applied to design the velocity controlsystem parameters To show the effectiveness of the controllaw comparative simulations of a missile in which pureproportional navigation mode has been taken into consid-eration are provided Simulation results demonstrate thatthe proposed velocity control law has a good performanceproviding reference to the design for velocity control system
10 Discrete Dynamics in Nature and Society
of the missileThe extensions of the presented coningmotioncontrol laws to a spinning missile and the inclusion of thedynamics in the velocity control system are possible areas offurther research
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Natural Science Founda-tion of China (NSFC) under Grant no 11176012 and theResearch Innovation Project for Graduate Student of Jiangsu-Provincial Ordinary University under Grant no KLYX15-0394
References
[1] K Enomoto T Yamasakiy H Taknoz and Y Baba ldquoA study ona velocity control system design using the dynamic inversionmethodrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference AIAA 2010-8204 Toronto Canada August2010
[2] V Istratie ldquoThree-dimensional optimal skip entrywith terminalmaximum velocityrdquo in Proceedings of the 22nd AtmosphericFlight Mechanics Conference AIAA 97-3483 New Orleans LaUSA August 1997
[3] A Saraf J A Leavitt D T Chen and K D Mease ldquoDesignand evaluation of an acceleration guidance algorithm for entryrdquoJournal of Spacecraft and Rockets vol 41 no 6 pp 986ndash9962004
[4] L Bruyere ldquoDynamic inversion for missile lateral velocity con-trol via polynomial eigenstructure assignmentrdquo in Proceedingsof the AIAA Guidance Navigation and Control Conference andExhibit Austin Tex USA August 2003
[5] D M Acosta and S S Joshi ldquoAdaptive nonlinear dynamicinversion control of an autonomous airship for the explorationof titanrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Hilton Head Island SC USAAugust 2007
[6] Y-X Jiang and J Cui ldquoEffectiveness of weaving maneuverstrategy of a missilerdquo Journal of Beijing University of Aeronauticsand Astronautics vol 28 no 2 pp 133ndash136 2002
[7] W H Curry and J F Reed ldquoMeasurement of Magnus effectson a sounding rocket model in a supersonic wind tunnelrdquo inProceedings of the Aerodynamic Testing Conference AmericanInstitute of Aeronautics and Astronautics Los Angeles CalifUSA September 1966
[8] X R Mao S X Yang and Y Xu ldquoConing motion stability ofwrap around fin rocketsrdquo Science in China Series E Technologi-cal Sciences vol 50 no 3 pp 343ndash350 2007
[9] J Morote and G Liano ldquoStability analysis and flight trials ofa clipped wrap around fin configurationrdquo in Proceedings ofthe Aiaa Atmospheric Flight Mechanics Conference and ExhibitAAAI 2004-5055 American Institute of Aeronautics andAstro-nautics Providence RI USA August 2004
[10] J Song ldquoA velocity control method of the reentry vehicle basedon flight simulationrdquoMissiles and Space Vehicles no 2 pp 5ndash72012
[11] FWang X Liu J Liang and X Fang ldquoVelocity control methodbased on terminal restraintrdquo Flight Dynamics vol 29 no 6 pp52ndash55 2011
[12] X R Mao S X Yang and Y Xu ldquoResearch on the coningmotion of wrap-around fin projectilesrdquo Canadian Aeronauticsand Space Journal vol 52 no 3 pp 119ndash125 2006
[13] K Y Li L Y Zhao andW Zhou ldquoStability of coning motion ofspinning rocket projectiles at high altituderdquo Journal ofDynamicsand Control vol 10 no 3 pp 239ndash243 2012
[14] X R Mao and S X Yang ldquoOptimal control of coning motionof spinning missilesrdquo Journal of Aerospace Engineering vol 28no 2 Article ID 04014068 pp 1ndash10 2015
[15] H-B Wang and J-S Wu ldquoConing motion of rockets itsnumerical simulation and restraintrdquo Transaction of BeijingInstitute of Technology vol 27 no 3 pp 196ndash199 2007
[16] P K A Menon V H L Cheng C A Lin and M MBriggs ldquoHigh-performance missile synthesis with trajectoryand propulsion system optimizationrdquo Journal of Spacecraft andRockets vol 24 no 6 pp 552ndash557 1987
[17] X-P Bai Y-H Zhao and Y-N Liu ldquoA novel approach tostudy real-time dynamic optimization analysis and simulationcomplex mine logistics transportation hybrid system with beltand surge linksrdquo Discrete Dynamics in Nature and Society vol2015 Article ID 601578 8 pages 2015
[18] J T Betts Practical Methods for Optimal Control Using Nonlin-ear Programming SIAM 1st edition 2001
[19] F Fahroo and I M Ross ldquoCostate estimation by a Legendrepseudospectral methodrdquo Journal of Guidance Control andDynamics vol 24 no 2 pp 270ndash277 2001
[20] M M Khader N H Sweilam and W Y Kota ldquoCardinalfunctions for Legendre pseudo-spectral method for solving theintegro-differential equationsrdquo Journal of the Egyptian Mathe-matical Society vol 22 no 3 pp 511ndash516 2014
[21] C L Darby W W Hager and A V Rao ldquoDirect trajectoryoptimization using a variable low-order adaptive pseudospec-tral methodrdquo Journal of Spacecraft and Rockets vol 48 no 3pp 433ndash445 2011
[22] A Wachter and L T Biegler ldquoOn the implementation ofan interior-point filter line-search algorithm for large-scalenonlinear programmingrdquoMathematical Programming vol 106no 1 pp 25ndash57 2006
[23] L Bruyere B A Whitey and A Tsourdos ldquoDynamic inversionformissile lateral velocity control via polynomial eigenstructureassignmentrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference and Exhibit AIAA 2003-5792 AustinTex USA August 2003
[24] R S Sun C Ming and C J Sun ldquoTrajectory optimizationdesign for morphing wing missilerdquo Journal of Harbin Instituteof Technology vol 22 no 5 pp 48ndash53 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 7
34 Integrated Design for Velocity Control and TrajectoryControl On the other hand in order to make the missile hitthe target precisely it is necessary to design an appropriatecontrol law under which the normal acceleration 119886
119898can be
formulated with the relative motion between the missile andthe target as follows
119886119898= 119891 (119903 120585) (31)
where 119903 denotes directive distance betweenmissile and targetand 120585 is angle of line-of-sight (LOS)
Traditional control laws are determined to approach theconvergence of the distance and the LOS rate between themissile and the target For instance in terms of classicproportional navigation (PN) method it is concluded thatmissile acceleration commands 119886
119898are in proportion to the
rate of LOS 120585
From (27) the integrated guidance commands can bewritten as follows
119886119910119888
= Δ119886119910119888+ 119886120575sin120596119905
119886119911119888= Δ119886119911119888+ 119886120575cos120596119905
(32)
where Δ119886119910119888
and Δ119886119911119888
denote the normal PN commands inlongitudinal and lateral plane respectively
As given in (32) if the velocity meets the anticipantrequirement that is 119886
120575= 0 the missile will stop coning
motion andwill fly through the proportion guidance law so asto hit the target accurately Otherwise the missile will do theconingmotion whichmakes a continuous alternate changingbetween the angle of attack 120575 sin120596119905 and sideslip angle120575 cos120596119905 respectively In an alternating cycle the equivalentlift force produced by the alternate AOA is equal to zero andthe same to the side force That is to say only the drag forceincreases during the period of coning motion
Additionally consistent with the normal control com-mands Δ119886
119910119888and Δ119886
119911119888 the total AOA of the missile can be
given as
Δ = radic1205722+ 1205732
= radic(Δ120572 + 120575 sin120596119905)2 + (Δ120573 + 120575 cos120596119905)2
= radicΔ1205722+ Δ1205732+ ℎ (120575 Δ120572 Δ120573) + 120575
2
(33)
where 120573 represents sideslip angle and ℎ(120575 Δ120572 Δ120573) =
2120575(Δ120572 sin120596119905 + Δ120573 cos120596119905)From (33) if the missile flies without coning motion that
is 120575 = 0 the total AOA will be simplified as
Δ = radicΔ1205722+ Δ1205732 (34)
Since ℎ(120575 Δ120572 Δ120573) changes periodically with time asshown in (33) it is possible that the missile with coningmotion produces less total AOA than that without coningmotion when the item ℎ(120575 Δ120572 Δ120573) + 120575
2lt 0 That is to
say coning motion control results in the missilersquos dragdecrease especially when the weight of the missile gravity
in the direction of the velocity is over the drag force that isminus119902119878119862119909minus 119898119892 sin 120579 gt 0 and it is concluded that the speed of
the missile will increase and not decrease Consequently toprevent this from happening the inequation can be supposedas
Δ120572 sin120596119905 + Δ120573 cos120596119905 gt 0 (35)
which gives
radicΔ1205722+ Δ1205732 sin (120596119905 + 120596
0) gt 0 (36)
where 1205960is equal to acos(Δ120572radicΔ120572
2+ Δ1205732)
In order to meet inequation (36) all along circularfrequency 120596 should satisfy
2120587119899 le 120596119905 + 1205960le 2120587119899 + 120587 119899 isin 119864 (37)
So2120587119899 minus 120596
0
119905
le 120596 le
2120587119899 + 120587 minus 1205960
119905
(38)
In view of the dynamic characteristics of the missile andthe performance of the actuator the bandwidth of the coiningmotion command must be less than that of the actuatorOtherwise it is difficult for the missile guidance system totrack the guidance commandThus the angular ratio 120596mustbe subject to 120596 lt 120596
119879 that is
2120587119899 + 120587 minus 1205960
119905
lt 120596119879
119899 = Round [120596119879119905 minus 120587 + 120596
0
2120587
] (39)
where 120596119879represents the bandwidth of the system
4 Simulation Example
In this section a simulation example of the velocity controlsystem by using coning motion technique is demonstratedfor a missile whose indexes include terminal speed terminalpath angle and miss distance In order to exhibit the velocitycontrol performance the conventional PN mode withoutthe coning motion and particle swarm optimization (PSO)approach are involved for comparing studyThe initial condi-tions that the missile makes coning motion are set as followsthe initial values of 119910 120579 119881 and Ψ
119881are set to be 119909(0) =
minus19 km 119910(0) = 10 km 120579(0) = minus20 deg 119881(0) = 500msand Ψ
119881(0) = 0 deg The initial position of the virtual target is
selected as (minus7292 9329 0)m besides the total flight time 119905119879
638 s The flight constraints are set as 120579low = minus30∘ 120579top = 30
∘119910low = 0 km 119910top = 10 km119881
119891= 250ms 120579
119891= minus25
∘ 120572down =minus20 deg 120572up = 20 deg 119886
119910down = minus50ms2 and 119886119910up = 50m
s2 Additionally the design process of PSO trajectory isreferred to [24] and the parameters of the adopted PSOmethod are 119898 = 50 119899 = 2 and 119888
1= 1198882= 18 Inertial weight
119908 is set to be reduced linearly from 10 to 04 and the searchwill be terminated if the fitness value is less than 04 or thenumber of iteration reaches 150
According to the above integrated design method forvelocity control and trajectory control the simulation results
8 Discrete Dynamics in Nature and Society
Table 1 Simulation results produced by different guidance laws
Guidance withvelocity control
Guidance withoutvelocity control
Optimizationtrajectory profile PSO trajectory profile
Final velocity (ms) 25409 28136 2550 2556Final flying path angle (deg) minus1565 minus2018 minus2146 minus2093Miss distance (m) 22 16 06 08
minus20minus15
minus10minus50
minus1minus05
005
1
0
2
4
6
8
10
x (km)
y(k
m)
z (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 6 3D curve of the flight trajectories with different modes
020
4060
80
minus10minus5
05
1015
minus10
minus5
0
5
10
15
B
A
Optimal trajectoryPSO trajectory
PN modeConing motion mode
t (s)
120572(d
eg)
120573 (deg)
Figure 7 History curve of the coning motion
are illustrated in Figures 6ndash13 Comparing the results of theoptimalmethod proposed in this paper with those of the PSOapproach it is concluded that the optimization solutions oftwo approaches are almost the same which implies the pre-sented direct discretizationmethod has sufficient precision ofoptimization stratifying the requirements of the constraintsas exhibited in Table 1
Additionally as the result shown in Figure 6 the velocitycontrol system has got the same normal control performance
minus15 minus10 minus5 0 5 10 15
minus10
minus5
0
5
10
A
B
120572(d
eg)
120573 (deg)
StartEnd
Figure 8 Variation of the nutation angle
minus20 minus15 minus10 minus5 0250
300
350
400
450
500
550
600
(m
s)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 9 Response of the velocity in different condition
to the conventional proportional navigation scheme FromFigures 7-8 where points A and B denote the start andend of the coning motion respectively the control systemimproves the magnitude amount of induced AOA whichmakes the missilersquos drag increase Therefore the speed of themissile decreases apparently in this period as illustrated in
Discrete Dynamics in Nature and Society 9
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120572(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 10 Variation of the angle of attack
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120573(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 11 Variation of the sideslip angle
Figure 9 Meanwhile Figures 10-11 indicate that the coningmotion control suspends at the range of 13 km and switchesinto the pure proportion guidance mode which suggeststhat the missile velocity is gradually moving to the indexof requirement because the magnitudes of the attack andsideslip angles are both getting smaller with the missileapproaching to the virtual target According to the path anglecurves outlined in Figures 12-13 it is helpful to suspendthe coning motion control before hitting the target becausethe coning motion reduces the tracking precision to theideal trajectory Finally as shown in Table 1 both guidancemodes meet the requirements of high guidance precision andterminal path angle but the coning motion control systemproduces lower amount of terminal velocity which is in linewith the desired velocity index
minus20 minus15 minus10 minus5 0minus40
minus35
minus30
minus25
minus20
minus15
minus10
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
120579(d
eg)
Figure 12 Curve of the trajectory inclination angle
minus20 minus15 minus10 minus5 0minus3
minus2
minus1
0
1
2
3
4
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
ΨV
(deg
)
Figure 13 Curve of the path angle versus range
5 Conclusions
In this paper a novel coning motion based guidance methodis proposed for the velocity control of missile system withterminal velocity constraint An ideal velocity profile is pre-sented by using nonlinear programming method in which avirtual moving target is put forward for missile to chase soas to perform the velocity control Moreover the dynamicinversion theory is applied to design the velocity controlsystem parameters To show the effectiveness of the controllaw comparative simulations of a missile in which pureproportional navigation mode has been taken into consid-eration are provided Simulation results demonstrate thatthe proposed velocity control law has a good performanceproviding reference to the design for velocity control system
10 Discrete Dynamics in Nature and Society
of the missileThe extensions of the presented coningmotioncontrol laws to a spinning missile and the inclusion of thedynamics in the velocity control system are possible areas offurther research
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Natural Science Founda-tion of China (NSFC) under Grant no 11176012 and theResearch Innovation Project for Graduate Student of Jiangsu-Provincial Ordinary University under Grant no KLYX15-0394
References
[1] K Enomoto T Yamasakiy H Taknoz and Y Baba ldquoA study ona velocity control system design using the dynamic inversionmethodrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference AIAA 2010-8204 Toronto Canada August2010
[2] V Istratie ldquoThree-dimensional optimal skip entrywith terminalmaximum velocityrdquo in Proceedings of the 22nd AtmosphericFlight Mechanics Conference AIAA 97-3483 New Orleans LaUSA August 1997
[3] A Saraf J A Leavitt D T Chen and K D Mease ldquoDesignand evaluation of an acceleration guidance algorithm for entryrdquoJournal of Spacecraft and Rockets vol 41 no 6 pp 986ndash9962004
[4] L Bruyere ldquoDynamic inversion for missile lateral velocity con-trol via polynomial eigenstructure assignmentrdquo in Proceedingsof the AIAA Guidance Navigation and Control Conference andExhibit Austin Tex USA August 2003
[5] D M Acosta and S S Joshi ldquoAdaptive nonlinear dynamicinversion control of an autonomous airship for the explorationof titanrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Hilton Head Island SC USAAugust 2007
[6] Y-X Jiang and J Cui ldquoEffectiveness of weaving maneuverstrategy of a missilerdquo Journal of Beijing University of Aeronauticsand Astronautics vol 28 no 2 pp 133ndash136 2002
[7] W H Curry and J F Reed ldquoMeasurement of Magnus effectson a sounding rocket model in a supersonic wind tunnelrdquo inProceedings of the Aerodynamic Testing Conference AmericanInstitute of Aeronautics and Astronautics Los Angeles CalifUSA September 1966
[8] X R Mao S X Yang and Y Xu ldquoConing motion stability ofwrap around fin rocketsrdquo Science in China Series E Technologi-cal Sciences vol 50 no 3 pp 343ndash350 2007
[9] J Morote and G Liano ldquoStability analysis and flight trials ofa clipped wrap around fin configurationrdquo in Proceedings ofthe Aiaa Atmospheric Flight Mechanics Conference and ExhibitAAAI 2004-5055 American Institute of Aeronautics andAstro-nautics Providence RI USA August 2004
[10] J Song ldquoA velocity control method of the reentry vehicle basedon flight simulationrdquoMissiles and Space Vehicles no 2 pp 5ndash72012
[11] FWang X Liu J Liang and X Fang ldquoVelocity control methodbased on terminal restraintrdquo Flight Dynamics vol 29 no 6 pp52ndash55 2011
[12] X R Mao S X Yang and Y Xu ldquoResearch on the coningmotion of wrap-around fin projectilesrdquo Canadian Aeronauticsand Space Journal vol 52 no 3 pp 119ndash125 2006
[13] K Y Li L Y Zhao andW Zhou ldquoStability of coning motion ofspinning rocket projectiles at high altituderdquo Journal ofDynamicsand Control vol 10 no 3 pp 239ndash243 2012
[14] X R Mao and S X Yang ldquoOptimal control of coning motionof spinning missilesrdquo Journal of Aerospace Engineering vol 28no 2 Article ID 04014068 pp 1ndash10 2015
[15] H-B Wang and J-S Wu ldquoConing motion of rockets itsnumerical simulation and restraintrdquo Transaction of BeijingInstitute of Technology vol 27 no 3 pp 196ndash199 2007
[16] P K A Menon V H L Cheng C A Lin and M MBriggs ldquoHigh-performance missile synthesis with trajectoryand propulsion system optimizationrdquo Journal of Spacecraft andRockets vol 24 no 6 pp 552ndash557 1987
[17] X-P Bai Y-H Zhao and Y-N Liu ldquoA novel approach tostudy real-time dynamic optimization analysis and simulationcomplex mine logistics transportation hybrid system with beltand surge linksrdquo Discrete Dynamics in Nature and Society vol2015 Article ID 601578 8 pages 2015
[18] J T Betts Practical Methods for Optimal Control Using Nonlin-ear Programming SIAM 1st edition 2001
[19] F Fahroo and I M Ross ldquoCostate estimation by a Legendrepseudospectral methodrdquo Journal of Guidance Control andDynamics vol 24 no 2 pp 270ndash277 2001
[20] M M Khader N H Sweilam and W Y Kota ldquoCardinalfunctions for Legendre pseudo-spectral method for solving theintegro-differential equationsrdquo Journal of the Egyptian Mathe-matical Society vol 22 no 3 pp 511ndash516 2014
[21] C L Darby W W Hager and A V Rao ldquoDirect trajectoryoptimization using a variable low-order adaptive pseudospec-tral methodrdquo Journal of Spacecraft and Rockets vol 48 no 3pp 433ndash445 2011
[22] A Wachter and L T Biegler ldquoOn the implementation ofan interior-point filter line-search algorithm for large-scalenonlinear programmingrdquoMathematical Programming vol 106no 1 pp 25ndash57 2006
[23] L Bruyere B A Whitey and A Tsourdos ldquoDynamic inversionformissile lateral velocity control via polynomial eigenstructureassignmentrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference and Exhibit AIAA 2003-5792 AustinTex USA August 2003
[24] R S Sun C Ming and C J Sun ldquoTrajectory optimizationdesign for morphing wing missilerdquo Journal of Harbin Instituteof Technology vol 22 no 5 pp 48ndash53 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
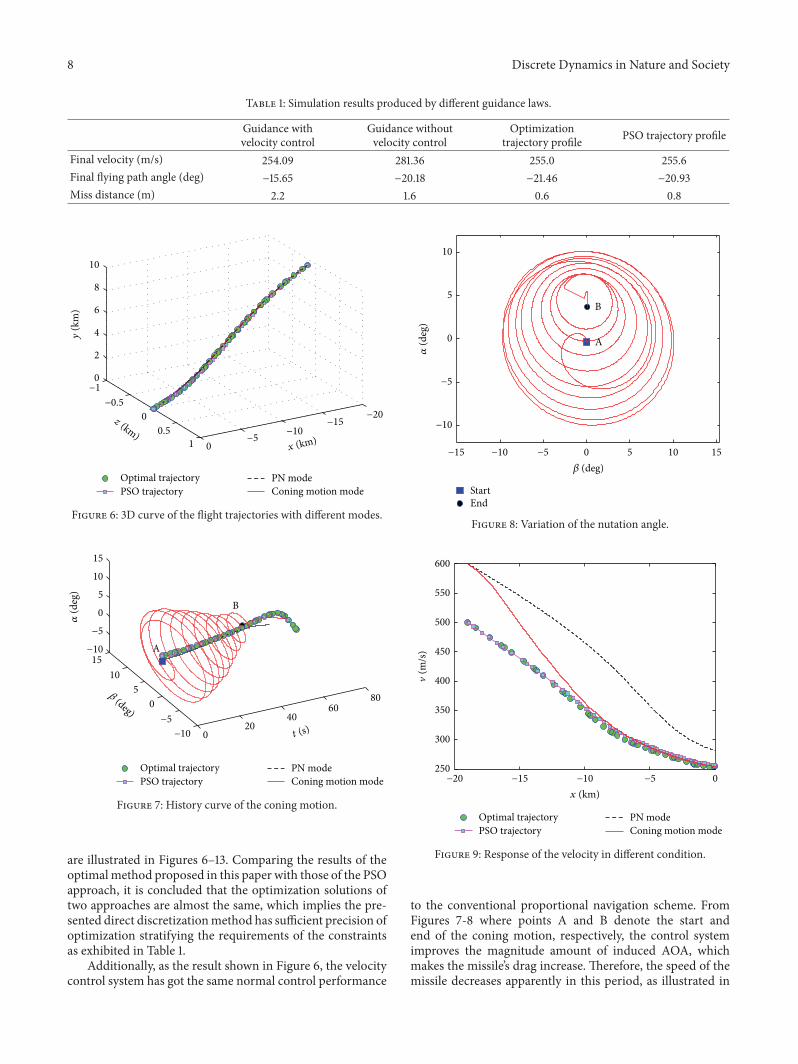
8 Discrete Dynamics in Nature and Society
Table 1 Simulation results produced by different guidance laws
Guidance withvelocity control
Guidance withoutvelocity control
Optimizationtrajectory profile PSO trajectory profile
Final velocity (ms) 25409 28136 2550 2556Final flying path angle (deg) minus1565 minus2018 minus2146 minus2093Miss distance (m) 22 16 06 08
minus20minus15
minus10minus50
minus1minus05
005
1
0
2
4
6
8
10
x (km)
y(k
m)
z (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 6 3D curve of the flight trajectories with different modes
020
4060
80
minus10minus5
05
1015
minus10
minus5
0
5
10
15
B
A
Optimal trajectoryPSO trajectory
PN modeConing motion mode
t (s)
120572(d
eg)
120573 (deg)
Figure 7 History curve of the coning motion
are illustrated in Figures 6ndash13 Comparing the results of theoptimalmethod proposed in this paper with those of the PSOapproach it is concluded that the optimization solutions oftwo approaches are almost the same which implies the pre-sented direct discretizationmethod has sufficient precision ofoptimization stratifying the requirements of the constraintsas exhibited in Table 1
Additionally as the result shown in Figure 6 the velocitycontrol system has got the same normal control performance
minus15 minus10 minus5 0 5 10 15
minus10
minus5
0
5
10
A
B
120572(d
eg)
120573 (deg)
StartEnd
Figure 8 Variation of the nutation angle
minus20 minus15 minus10 minus5 0250
300
350
400
450
500
550
600
(m
s)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 9 Response of the velocity in different condition
to the conventional proportional navigation scheme FromFigures 7-8 where points A and B denote the start andend of the coning motion respectively the control systemimproves the magnitude amount of induced AOA whichmakes the missilersquos drag increase Therefore the speed of themissile decreases apparently in this period as illustrated in
Discrete Dynamics in Nature and Society 9
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120572(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 10 Variation of the angle of attack
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120573(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 11 Variation of the sideslip angle
Figure 9 Meanwhile Figures 10-11 indicate that the coningmotion control suspends at the range of 13 km and switchesinto the pure proportion guidance mode which suggeststhat the missile velocity is gradually moving to the indexof requirement because the magnitudes of the attack andsideslip angles are both getting smaller with the missileapproaching to the virtual target According to the path anglecurves outlined in Figures 12-13 it is helpful to suspendthe coning motion control before hitting the target becausethe coning motion reduces the tracking precision to theideal trajectory Finally as shown in Table 1 both guidancemodes meet the requirements of high guidance precision andterminal path angle but the coning motion control systemproduces lower amount of terminal velocity which is in linewith the desired velocity index
minus20 minus15 minus10 minus5 0minus40
minus35
minus30
minus25
minus20
minus15
minus10
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
120579(d
eg)
Figure 12 Curve of the trajectory inclination angle
minus20 minus15 minus10 minus5 0minus3
minus2
minus1
0
1
2
3
4
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
ΨV
(deg
)
Figure 13 Curve of the path angle versus range
5 Conclusions
In this paper a novel coning motion based guidance methodis proposed for the velocity control of missile system withterminal velocity constraint An ideal velocity profile is pre-sented by using nonlinear programming method in which avirtual moving target is put forward for missile to chase soas to perform the velocity control Moreover the dynamicinversion theory is applied to design the velocity controlsystem parameters To show the effectiveness of the controllaw comparative simulations of a missile in which pureproportional navigation mode has been taken into consid-eration are provided Simulation results demonstrate thatthe proposed velocity control law has a good performanceproviding reference to the design for velocity control system
10 Discrete Dynamics in Nature and Society
of the missileThe extensions of the presented coningmotioncontrol laws to a spinning missile and the inclusion of thedynamics in the velocity control system are possible areas offurther research
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Natural Science Founda-tion of China (NSFC) under Grant no 11176012 and theResearch Innovation Project for Graduate Student of Jiangsu-Provincial Ordinary University under Grant no KLYX15-0394
References
[1] K Enomoto T Yamasakiy H Taknoz and Y Baba ldquoA study ona velocity control system design using the dynamic inversionmethodrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference AIAA 2010-8204 Toronto Canada August2010
[2] V Istratie ldquoThree-dimensional optimal skip entrywith terminalmaximum velocityrdquo in Proceedings of the 22nd AtmosphericFlight Mechanics Conference AIAA 97-3483 New Orleans LaUSA August 1997
[3] A Saraf J A Leavitt D T Chen and K D Mease ldquoDesignand evaluation of an acceleration guidance algorithm for entryrdquoJournal of Spacecraft and Rockets vol 41 no 6 pp 986ndash9962004
[4] L Bruyere ldquoDynamic inversion for missile lateral velocity con-trol via polynomial eigenstructure assignmentrdquo in Proceedingsof the AIAA Guidance Navigation and Control Conference andExhibit Austin Tex USA August 2003
[5] D M Acosta and S S Joshi ldquoAdaptive nonlinear dynamicinversion control of an autonomous airship for the explorationof titanrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Hilton Head Island SC USAAugust 2007
[6] Y-X Jiang and J Cui ldquoEffectiveness of weaving maneuverstrategy of a missilerdquo Journal of Beijing University of Aeronauticsand Astronautics vol 28 no 2 pp 133ndash136 2002
[7] W H Curry and J F Reed ldquoMeasurement of Magnus effectson a sounding rocket model in a supersonic wind tunnelrdquo inProceedings of the Aerodynamic Testing Conference AmericanInstitute of Aeronautics and Astronautics Los Angeles CalifUSA September 1966
[8] X R Mao S X Yang and Y Xu ldquoConing motion stability ofwrap around fin rocketsrdquo Science in China Series E Technologi-cal Sciences vol 50 no 3 pp 343ndash350 2007
[9] J Morote and G Liano ldquoStability analysis and flight trials ofa clipped wrap around fin configurationrdquo in Proceedings ofthe Aiaa Atmospheric Flight Mechanics Conference and ExhibitAAAI 2004-5055 American Institute of Aeronautics andAstro-nautics Providence RI USA August 2004
[10] J Song ldquoA velocity control method of the reentry vehicle basedon flight simulationrdquoMissiles and Space Vehicles no 2 pp 5ndash72012
[11] FWang X Liu J Liang and X Fang ldquoVelocity control methodbased on terminal restraintrdquo Flight Dynamics vol 29 no 6 pp52ndash55 2011
[12] X R Mao S X Yang and Y Xu ldquoResearch on the coningmotion of wrap-around fin projectilesrdquo Canadian Aeronauticsand Space Journal vol 52 no 3 pp 119ndash125 2006
[13] K Y Li L Y Zhao andW Zhou ldquoStability of coning motion ofspinning rocket projectiles at high altituderdquo Journal ofDynamicsand Control vol 10 no 3 pp 239ndash243 2012
[14] X R Mao and S X Yang ldquoOptimal control of coning motionof spinning missilesrdquo Journal of Aerospace Engineering vol 28no 2 Article ID 04014068 pp 1ndash10 2015
[15] H-B Wang and J-S Wu ldquoConing motion of rockets itsnumerical simulation and restraintrdquo Transaction of BeijingInstitute of Technology vol 27 no 3 pp 196ndash199 2007
[16] P K A Menon V H L Cheng C A Lin and M MBriggs ldquoHigh-performance missile synthesis with trajectoryand propulsion system optimizationrdquo Journal of Spacecraft andRockets vol 24 no 6 pp 552ndash557 1987
[17] X-P Bai Y-H Zhao and Y-N Liu ldquoA novel approach tostudy real-time dynamic optimization analysis and simulationcomplex mine logistics transportation hybrid system with beltand surge linksrdquo Discrete Dynamics in Nature and Society vol2015 Article ID 601578 8 pages 2015
[18] J T Betts Practical Methods for Optimal Control Using Nonlin-ear Programming SIAM 1st edition 2001
[19] F Fahroo and I M Ross ldquoCostate estimation by a Legendrepseudospectral methodrdquo Journal of Guidance Control andDynamics vol 24 no 2 pp 270ndash277 2001
[20] M M Khader N H Sweilam and W Y Kota ldquoCardinalfunctions for Legendre pseudo-spectral method for solving theintegro-differential equationsrdquo Journal of the Egyptian Mathe-matical Society vol 22 no 3 pp 511ndash516 2014
[21] C L Darby W W Hager and A V Rao ldquoDirect trajectoryoptimization using a variable low-order adaptive pseudospec-tral methodrdquo Journal of Spacecraft and Rockets vol 48 no 3pp 433ndash445 2011
[22] A Wachter and L T Biegler ldquoOn the implementation ofan interior-point filter line-search algorithm for large-scalenonlinear programmingrdquoMathematical Programming vol 106no 1 pp 25ndash57 2006
[23] L Bruyere B A Whitey and A Tsourdos ldquoDynamic inversionformissile lateral velocity control via polynomial eigenstructureassignmentrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference and Exhibit AIAA 2003-5792 AustinTex USA August 2003
[24] R S Sun C Ming and C J Sun ldquoTrajectory optimizationdesign for morphing wing missilerdquo Journal of Harbin Instituteof Technology vol 22 no 5 pp 48ndash53 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 9
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120572(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 10 Variation of the angle of attack
minus20 minus15 minus10 minus5 0minus10
minus5
0
5
10
15
120573(d
eg)
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
Figure 11 Variation of the sideslip angle
Figure 9 Meanwhile Figures 10-11 indicate that the coningmotion control suspends at the range of 13 km and switchesinto the pure proportion guidance mode which suggeststhat the missile velocity is gradually moving to the indexof requirement because the magnitudes of the attack andsideslip angles are both getting smaller with the missileapproaching to the virtual target According to the path anglecurves outlined in Figures 12-13 it is helpful to suspendthe coning motion control before hitting the target becausethe coning motion reduces the tracking precision to theideal trajectory Finally as shown in Table 1 both guidancemodes meet the requirements of high guidance precision andterminal path angle but the coning motion control systemproduces lower amount of terminal velocity which is in linewith the desired velocity index
minus20 minus15 minus10 minus5 0minus40
minus35
minus30
minus25
minus20
minus15
minus10
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
120579(d
eg)
Figure 12 Curve of the trajectory inclination angle
minus20 minus15 minus10 minus5 0minus3
minus2
minus1
0
1
2
3
4
x (km)
Optimal trajectoryPSO trajectory
PN modeConing motion mode
ΨV
(deg
)
Figure 13 Curve of the path angle versus range
5 Conclusions
In this paper a novel coning motion based guidance methodis proposed for the velocity control of missile system withterminal velocity constraint An ideal velocity profile is pre-sented by using nonlinear programming method in which avirtual moving target is put forward for missile to chase soas to perform the velocity control Moreover the dynamicinversion theory is applied to design the velocity controlsystem parameters To show the effectiveness of the controllaw comparative simulations of a missile in which pureproportional navigation mode has been taken into consid-eration are provided Simulation results demonstrate thatthe proposed velocity control law has a good performanceproviding reference to the design for velocity control system
10 Discrete Dynamics in Nature and Society
of the missileThe extensions of the presented coningmotioncontrol laws to a spinning missile and the inclusion of thedynamics in the velocity control system are possible areas offurther research
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Natural Science Founda-tion of China (NSFC) under Grant no 11176012 and theResearch Innovation Project for Graduate Student of Jiangsu-Provincial Ordinary University under Grant no KLYX15-0394
References
[1] K Enomoto T Yamasakiy H Taknoz and Y Baba ldquoA study ona velocity control system design using the dynamic inversionmethodrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference AIAA 2010-8204 Toronto Canada August2010
[2] V Istratie ldquoThree-dimensional optimal skip entrywith terminalmaximum velocityrdquo in Proceedings of the 22nd AtmosphericFlight Mechanics Conference AIAA 97-3483 New Orleans LaUSA August 1997
[3] A Saraf J A Leavitt D T Chen and K D Mease ldquoDesignand evaluation of an acceleration guidance algorithm for entryrdquoJournal of Spacecraft and Rockets vol 41 no 6 pp 986ndash9962004
[4] L Bruyere ldquoDynamic inversion for missile lateral velocity con-trol via polynomial eigenstructure assignmentrdquo in Proceedingsof the AIAA Guidance Navigation and Control Conference andExhibit Austin Tex USA August 2003
[5] D M Acosta and S S Joshi ldquoAdaptive nonlinear dynamicinversion control of an autonomous airship for the explorationof titanrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Hilton Head Island SC USAAugust 2007
[6] Y-X Jiang and J Cui ldquoEffectiveness of weaving maneuverstrategy of a missilerdquo Journal of Beijing University of Aeronauticsand Astronautics vol 28 no 2 pp 133ndash136 2002
[7] W H Curry and J F Reed ldquoMeasurement of Magnus effectson a sounding rocket model in a supersonic wind tunnelrdquo inProceedings of the Aerodynamic Testing Conference AmericanInstitute of Aeronautics and Astronautics Los Angeles CalifUSA September 1966
[8] X R Mao S X Yang and Y Xu ldquoConing motion stability ofwrap around fin rocketsrdquo Science in China Series E Technologi-cal Sciences vol 50 no 3 pp 343ndash350 2007
[9] J Morote and G Liano ldquoStability analysis and flight trials ofa clipped wrap around fin configurationrdquo in Proceedings ofthe Aiaa Atmospheric Flight Mechanics Conference and ExhibitAAAI 2004-5055 American Institute of Aeronautics andAstro-nautics Providence RI USA August 2004
[10] J Song ldquoA velocity control method of the reentry vehicle basedon flight simulationrdquoMissiles and Space Vehicles no 2 pp 5ndash72012
[11] FWang X Liu J Liang and X Fang ldquoVelocity control methodbased on terminal restraintrdquo Flight Dynamics vol 29 no 6 pp52ndash55 2011
[12] X R Mao S X Yang and Y Xu ldquoResearch on the coningmotion of wrap-around fin projectilesrdquo Canadian Aeronauticsand Space Journal vol 52 no 3 pp 119ndash125 2006
[13] K Y Li L Y Zhao andW Zhou ldquoStability of coning motion ofspinning rocket projectiles at high altituderdquo Journal ofDynamicsand Control vol 10 no 3 pp 239ndash243 2012
[14] X R Mao and S X Yang ldquoOptimal control of coning motionof spinning missilesrdquo Journal of Aerospace Engineering vol 28no 2 Article ID 04014068 pp 1ndash10 2015
[15] H-B Wang and J-S Wu ldquoConing motion of rockets itsnumerical simulation and restraintrdquo Transaction of BeijingInstitute of Technology vol 27 no 3 pp 196ndash199 2007
[16] P K A Menon V H L Cheng C A Lin and M MBriggs ldquoHigh-performance missile synthesis with trajectoryand propulsion system optimizationrdquo Journal of Spacecraft andRockets vol 24 no 6 pp 552ndash557 1987
[17] X-P Bai Y-H Zhao and Y-N Liu ldquoA novel approach tostudy real-time dynamic optimization analysis and simulationcomplex mine logistics transportation hybrid system with beltand surge linksrdquo Discrete Dynamics in Nature and Society vol2015 Article ID 601578 8 pages 2015
[18] J T Betts Practical Methods for Optimal Control Using Nonlin-ear Programming SIAM 1st edition 2001
[19] F Fahroo and I M Ross ldquoCostate estimation by a Legendrepseudospectral methodrdquo Journal of Guidance Control andDynamics vol 24 no 2 pp 270ndash277 2001
[20] M M Khader N H Sweilam and W Y Kota ldquoCardinalfunctions for Legendre pseudo-spectral method for solving theintegro-differential equationsrdquo Journal of the Egyptian Mathe-matical Society vol 22 no 3 pp 511ndash516 2014
[21] C L Darby W W Hager and A V Rao ldquoDirect trajectoryoptimization using a variable low-order adaptive pseudospec-tral methodrdquo Journal of Spacecraft and Rockets vol 48 no 3pp 433ndash445 2011
[22] A Wachter and L T Biegler ldquoOn the implementation ofan interior-point filter line-search algorithm for large-scalenonlinear programmingrdquoMathematical Programming vol 106no 1 pp 25ndash57 2006
[23] L Bruyere B A Whitey and A Tsourdos ldquoDynamic inversionformissile lateral velocity control via polynomial eigenstructureassignmentrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference and Exhibit AIAA 2003-5792 AustinTex USA August 2003
[24] R S Sun C Ming and C J Sun ldquoTrajectory optimizationdesign for morphing wing missilerdquo Journal of Harbin Instituteof Technology vol 22 no 5 pp 48ndash53 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Discrete Dynamics in Nature and Society
of the missileThe extensions of the presented coningmotioncontrol laws to a spinning missile and the inclusion of thedynamics in the velocity control system are possible areas offurther research
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by the Natural Science Founda-tion of China (NSFC) under Grant no 11176012 and theResearch Innovation Project for Graduate Student of Jiangsu-Provincial Ordinary University under Grant no KLYX15-0394
References
[1] K Enomoto T Yamasakiy H Taknoz and Y Baba ldquoA study ona velocity control system design using the dynamic inversionmethodrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference AIAA 2010-8204 Toronto Canada August2010
[2] V Istratie ldquoThree-dimensional optimal skip entrywith terminalmaximum velocityrdquo in Proceedings of the 22nd AtmosphericFlight Mechanics Conference AIAA 97-3483 New Orleans LaUSA August 1997
[3] A Saraf J A Leavitt D T Chen and K D Mease ldquoDesignand evaluation of an acceleration guidance algorithm for entryrdquoJournal of Spacecraft and Rockets vol 41 no 6 pp 986ndash9962004
[4] L Bruyere ldquoDynamic inversion for missile lateral velocity con-trol via polynomial eigenstructure assignmentrdquo in Proceedingsof the AIAA Guidance Navigation and Control Conference andExhibit Austin Tex USA August 2003
[5] D M Acosta and S S Joshi ldquoAdaptive nonlinear dynamicinversion control of an autonomous airship for the explorationof titanrdquo in Proceedings of the AIAA Guidance Navigation andControl Conference and Exhibit Hilton Head Island SC USAAugust 2007
[6] Y-X Jiang and J Cui ldquoEffectiveness of weaving maneuverstrategy of a missilerdquo Journal of Beijing University of Aeronauticsand Astronautics vol 28 no 2 pp 133ndash136 2002
[7] W H Curry and J F Reed ldquoMeasurement of Magnus effectson a sounding rocket model in a supersonic wind tunnelrdquo inProceedings of the Aerodynamic Testing Conference AmericanInstitute of Aeronautics and Astronautics Los Angeles CalifUSA September 1966
[8] X R Mao S X Yang and Y Xu ldquoConing motion stability ofwrap around fin rocketsrdquo Science in China Series E Technologi-cal Sciences vol 50 no 3 pp 343ndash350 2007
[9] J Morote and G Liano ldquoStability analysis and flight trials ofa clipped wrap around fin configurationrdquo in Proceedings ofthe Aiaa Atmospheric Flight Mechanics Conference and ExhibitAAAI 2004-5055 American Institute of Aeronautics andAstro-nautics Providence RI USA August 2004
[10] J Song ldquoA velocity control method of the reentry vehicle basedon flight simulationrdquoMissiles and Space Vehicles no 2 pp 5ndash72012
[11] FWang X Liu J Liang and X Fang ldquoVelocity control methodbased on terminal restraintrdquo Flight Dynamics vol 29 no 6 pp52ndash55 2011
[12] X R Mao S X Yang and Y Xu ldquoResearch on the coningmotion of wrap-around fin projectilesrdquo Canadian Aeronauticsand Space Journal vol 52 no 3 pp 119ndash125 2006
[13] K Y Li L Y Zhao andW Zhou ldquoStability of coning motion ofspinning rocket projectiles at high altituderdquo Journal ofDynamicsand Control vol 10 no 3 pp 239ndash243 2012
[14] X R Mao and S X Yang ldquoOptimal control of coning motionof spinning missilesrdquo Journal of Aerospace Engineering vol 28no 2 Article ID 04014068 pp 1ndash10 2015
[15] H-B Wang and J-S Wu ldquoConing motion of rockets itsnumerical simulation and restraintrdquo Transaction of BeijingInstitute of Technology vol 27 no 3 pp 196ndash199 2007
[16] P K A Menon V H L Cheng C A Lin and M MBriggs ldquoHigh-performance missile synthesis with trajectoryand propulsion system optimizationrdquo Journal of Spacecraft andRockets vol 24 no 6 pp 552ndash557 1987
[17] X-P Bai Y-H Zhao and Y-N Liu ldquoA novel approach tostudy real-time dynamic optimization analysis and simulationcomplex mine logistics transportation hybrid system with beltand surge linksrdquo Discrete Dynamics in Nature and Society vol2015 Article ID 601578 8 pages 2015
[18] J T Betts Practical Methods for Optimal Control Using Nonlin-ear Programming SIAM 1st edition 2001
[19] F Fahroo and I M Ross ldquoCostate estimation by a Legendrepseudospectral methodrdquo Journal of Guidance Control andDynamics vol 24 no 2 pp 270ndash277 2001
[20] M M Khader N H Sweilam and W Y Kota ldquoCardinalfunctions for Legendre pseudo-spectral method for solving theintegro-differential equationsrdquo Journal of the Egyptian Mathe-matical Society vol 22 no 3 pp 511ndash516 2014
[21] C L Darby W W Hager and A V Rao ldquoDirect trajectoryoptimization using a variable low-order adaptive pseudospec-tral methodrdquo Journal of Spacecraft and Rockets vol 48 no 3pp 433ndash445 2011
[22] A Wachter and L T Biegler ldquoOn the implementation ofan interior-point filter line-search algorithm for large-scalenonlinear programmingrdquoMathematical Programming vol 106no 1 pp 25ndash57 2006
[23] L Bruyere B A Whitey and A Tsourdos ldquoDynamic inversionformissile lateral velocity control via polynomial eigenstructureassignmentrdquo in Proceedings of the AIAA Guidance Navigationand Control Conference and Exhibit AIAA 2003-5792 AustinTex USA August 2003
[24] R S Sun C Ming and C J Sun ldquoTrajectory optimizationdesign for morphing wing missilerdquo Journal of Harbin Instituteof Technology vol 22 no 5 pp 48ndash53 2015
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of