résistance des matérieaux
TRANSCRIPT

R.D.M.Résistance des Matériaux
Institut de Technologie du Cambodge
2007-2008 Vong Seng
Plan du Cours1- Introduction
2- Actions
3- Contraintes
4- Déformation
5- Propriétés Mécaniques des Matériaux
6- Caractéristiques Géométriques d’une Section
7- Types d’Appuis
8- Eléments de Réduction
9- Traction et Compression Simple
10- Flexion pure
11- Flexion Cisaillante
12- Flexion Gauche
13- Flexion Composée
14- Flexion des Pièces Courbes
15- Comportement au-delà du Domaine Elastique
16- Calcul des Déplacements de la Poutre
17- Flambement des Pièces Longes
18- Torsion
19- Concentration des Contraintes
20- Critère de Défaillance et Contraintes Permises
1- Introduction1.1- Le but
L’étude de la résistance des matériaux a pour but d’assurer qu’on utilise dans une pièce donnée, une quantité minimale de matériau, tout en satisfaisant aux exigences suivantes :
- Résistance : la pièce doit pouvoir supporter et transmettre les charges externes qui lui sont imposées ;
- Rigidité : la pièce ne doit pas subir de déformation excessive lorsqu’elle est sollicitée ;
- Stabilité : la pièce doit conserver son intégrité géométrique afin que soient évitées des conditions d’instabilité(flambement) ;
- Endurance : la pièce, si elle est soumise à un chargement répété, doit pouvoir tolérer sans rupture un certain nombre de cycles de sollicitation variable (fatigue) ;
- Résilience : enfin, dans le cas où un chargement dynamique est à prévoir (impact), la pièce doit pouvoir absorber une certaine quantité d’énergie sans s’en trouver trop endommagée.
1- Introduction1.2- Hypothèses de base
Les hypothèses de bas que nous posons sont les suivantes :
- Un matériau continu n’a ni fissures ni cavités.
- Un matériau homogène a les mêmes propriétés en tout point.
- Un matériau isotrope a, en un point donné, les mêmes propriétés dans toutes les directions.
- Les forces internes à l’état initial, dites « résiduelle », sont souvent présentes dans les matériaux. Si ces forces ne sont pas suffisamment faibles pour être jugées négligeables, il faut soit tenir compte en les mesurant expérimentalement, soit les réduire par les techniques spéciales (par exemple le traitement thermique).
1.3- Méthode de résolutionOn résout un problème de résistance des matériaux selon une démarche systématique qui comporte les trois étapes fondamentales suivantes :
1- Introduction- L’étude des forces et des conditions d’équilibre ;
- L’étude des déplacements et de la compatibilité géométrique ;
- L’application des relations forces/déplacements
Les conditions d’exigences pour études des équilibres du
corps sont équilibre de translation et équilibre de
rotation
0F =∑0M =∑
Dans un système de coordonnées cartésiennes (axes des x, des y et des z), ces équations vectorielles sont équivalentes aux six scalaires ci-dessous:
Équilibres de translation :
Suivante axe X : ΣFx = 0
Suivante axe Y : ΣFy = 0
Suivante axe Z : ΣFz = 0
Équilibres de rotation :
Autour de l’axe X : ΣMx = 0
Autour de l’axe Y : ΣMy = 0
Autour de l’axe Z : ΣMz = 0
2- Actions2.1- Types des actions
On distingue les actions suivantes : a.) leur mode d’action : - Action direct : (les charges en général) forces concentrées ou réparties
- Actions indirectes : déformations imposées ou entravées
b.) leur variation dans le temps : - Actions permanentes, désignées par G ou g : poids propre des structures, poids propre des éléments non structuraux, poussée des terres, déformations imposées par leur mode de construction de la structure, tassements,...
- Actions variables, désignée par Q ou q : charge d’exploitation, poids de certains éléments en phase constructive, charge de montage, charge mobiles et leurs effets, vent, déformations imposées par les variations de températures,...
- Actions accidentelles : chocs et explosions, incendie, affaissements accidentels, tremblements de terre, ...
2- Actions2.2- Forces externes
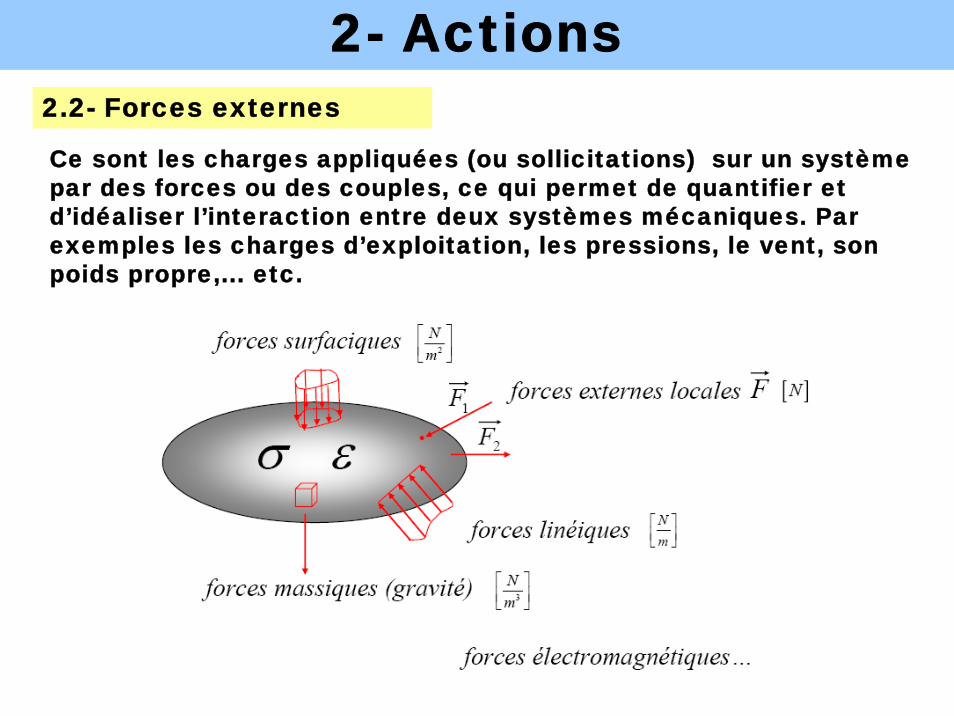
Ce sont les charges appliquées (ou sollicitations) sur un système par des forces ou des couples, ce qui permet de quantifier et d’idéaliser l’interaction entre deux systèmes mécaniques. Par exemples les charges d’exploitation, les pressions, le vent, son poids propre,... etc.
2- Actions- Forces de surface (ou forces surfaciques) :
Elles sont causées par le contact entre deux corps. Pour le cas particulier, la surface de contact est beaucoup plus petite par rapport à la surface totale du corps, on peut les idéaliser comme une force concentrée (ou charge concentrée) telle que cette force est appliquée en un point. Et on peut encore les idéaliser comme une force répartie linéaire (ou charge répartie linéaire) si la force est appliquée au long une surface étroite.
- Forces de volume (ou forces volumiques)
Un corps est exercé par une force sans contact physiquement en direct avec un autre corps. Cette force due à la gravité ou au champ électromagnétique et elle représente normalement une force concentrée exercée au centre de gravité du corps s’appelant le poids propre.
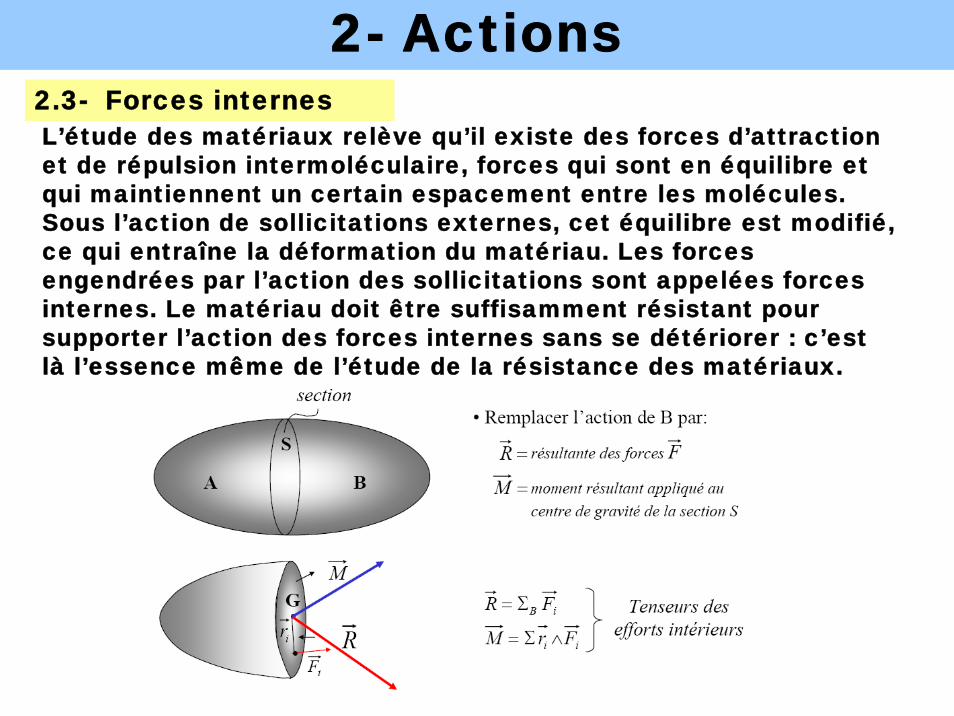
2- Actions2.3- Forces internesL’étude des matériaux relève qu’il existe des forces d’attraction et de répulsion intermoléculaire, forces qui sont en équilibre et qui maintiennent un certain espacement entre les molécules. Sous l’action de sollicitations externes, cet équilibre est modifié, ce qui entraîne la déformation du matériau. Les forces engendrées par l’action des sollicitations sont appelées forces internes. Le matériau doit être suffisamment résistant pour supporter l’action des forces internes sans se détériorer : c’est là l’essence même de l’étude de la résistance des matériaux.
2- Actions
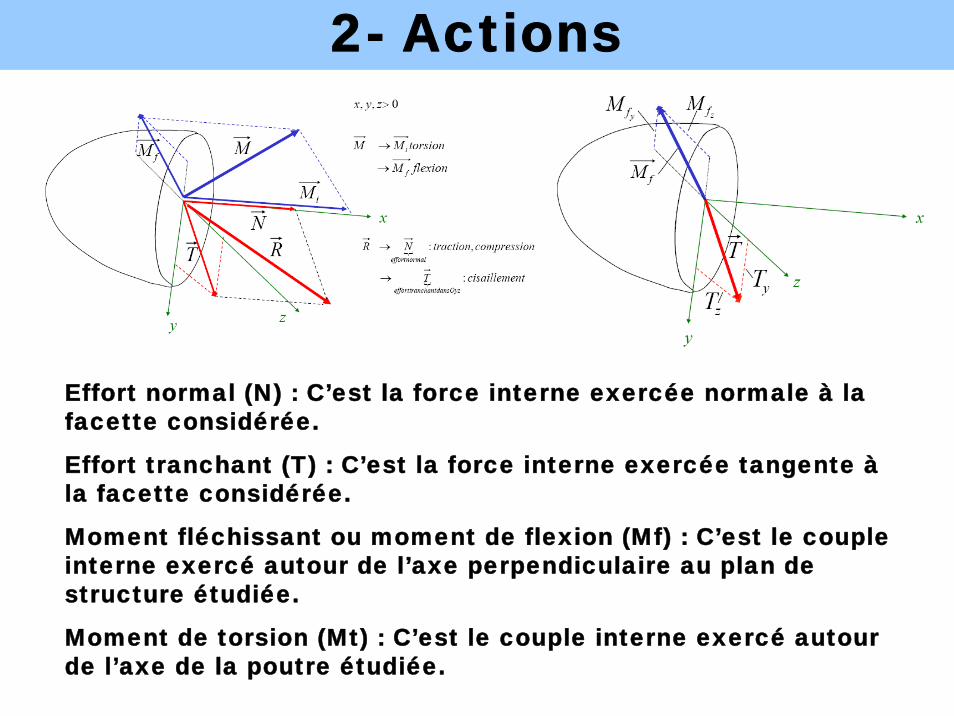
Effort normal (N) : C’est la force interne exercée normale à la facette considérée.
Effort tranchant (T) : C’est la force interne exercée tangente àla facette considérée.
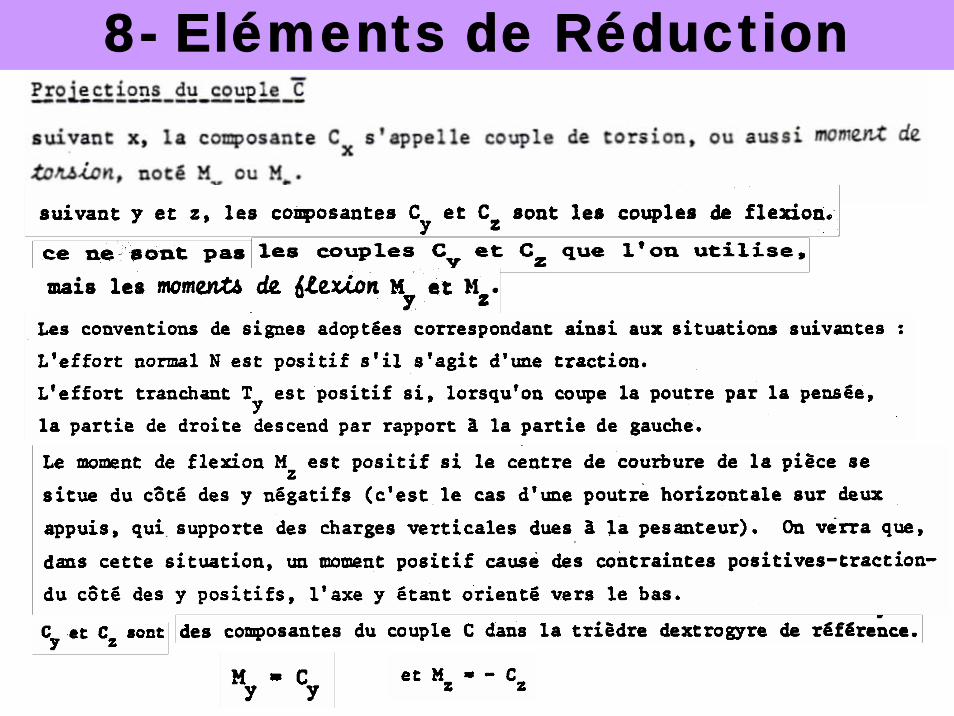
Moment fléchissant ou moment de flexion (Mf) : C’est le couple interne exercé autour de l’axe perpendiculaire au plan de structure étudiée.
Moment de torsion (Mt) : C’est le couple interne exercé autour de l’axe de la poutre étudiée.
3- Contraintes
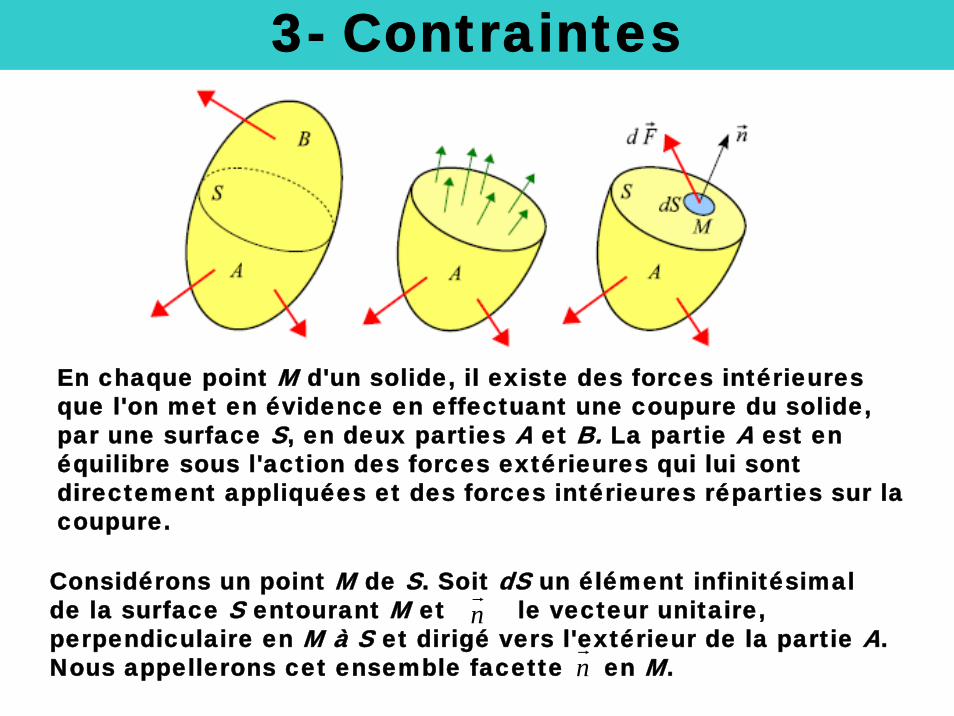
En chaque point M d'un solide, il existe des forces intérieures que l'on met en évidence en effectuant une coupure du solide, par une surface S, en deux parties A et B. La partie A est en équilibre sous l'action des forces extérieures qui lui sont directement appliquées et des forces intérieures réparties sur la coupure.
Considérons un point M de S. Soit dS un élément infinitésimal de la surface S entourant M et le vecteur unitaire, perpendiculaire en M à S et dirigé vers l'extérieur de la partie A. Nous appellerons cet ensemble facette en M.
n
n
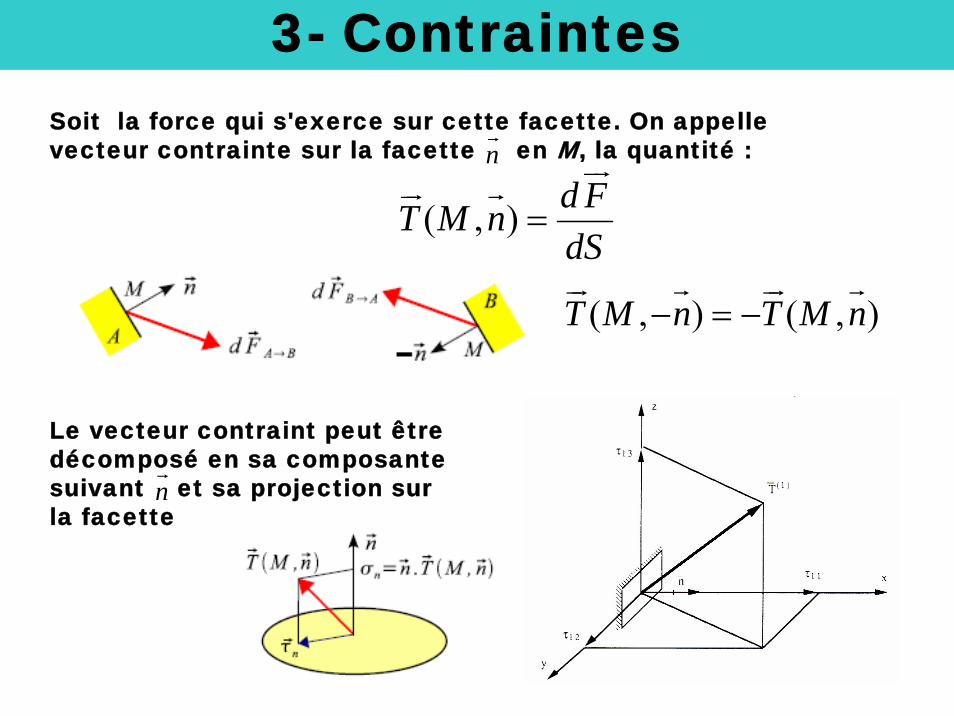
( , ) d FT M ndS
=
Soit la force qui s'exerce sur cette facette. On appelle vecteur contrainte sur la facette en M, la quantité : n
3- Contraintes
( , ) ( , )T M n T M n− = −
Le vecteur contraint peut être décomposé en sa composante suivant et sa projection sur la facette
n
3- Contraintes
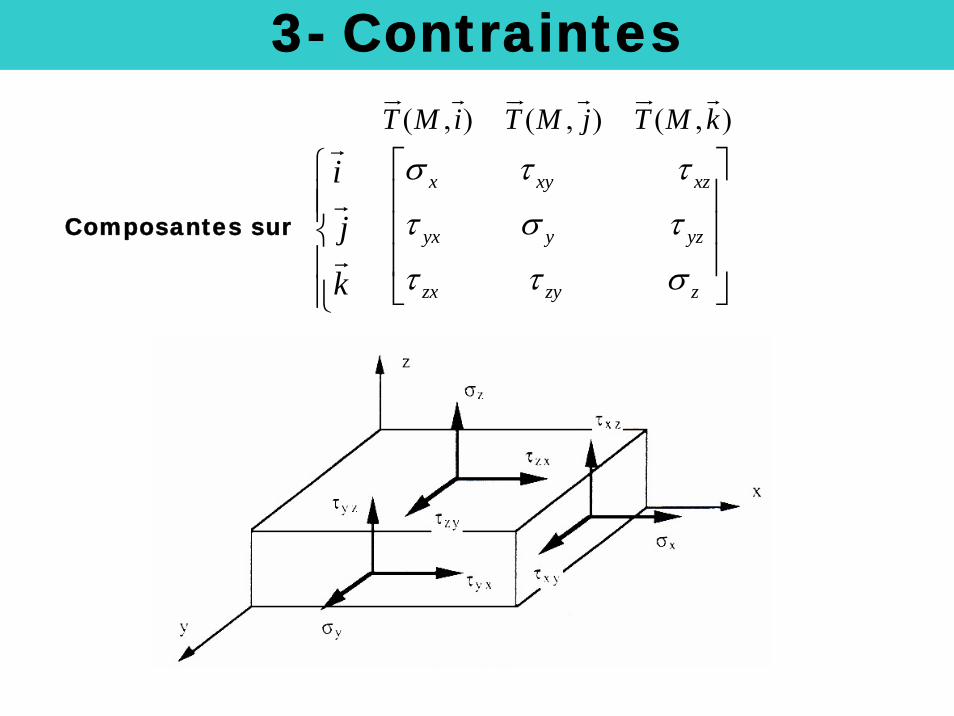
x xy xz
yx y yz
zx zy z
σ τ τ
τ σ τ
τ τ σ
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
i
j
k
⎧⎪⎪⎨⎪⎪⎩
( , ) ( , ) ( , )T M i T M j T M k
Composantes sur
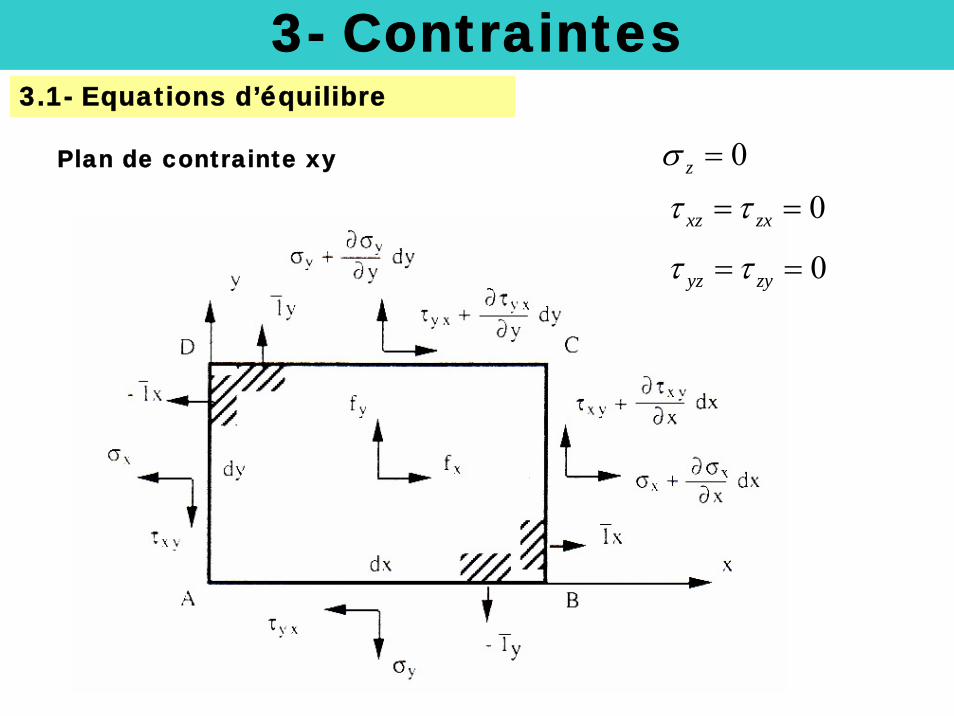
3- Contraintes3.1- Equations d’équilibre
Plan de contrainte xy
0xz zxτ τ= =
0yz zyτ τ= =
0zσ =
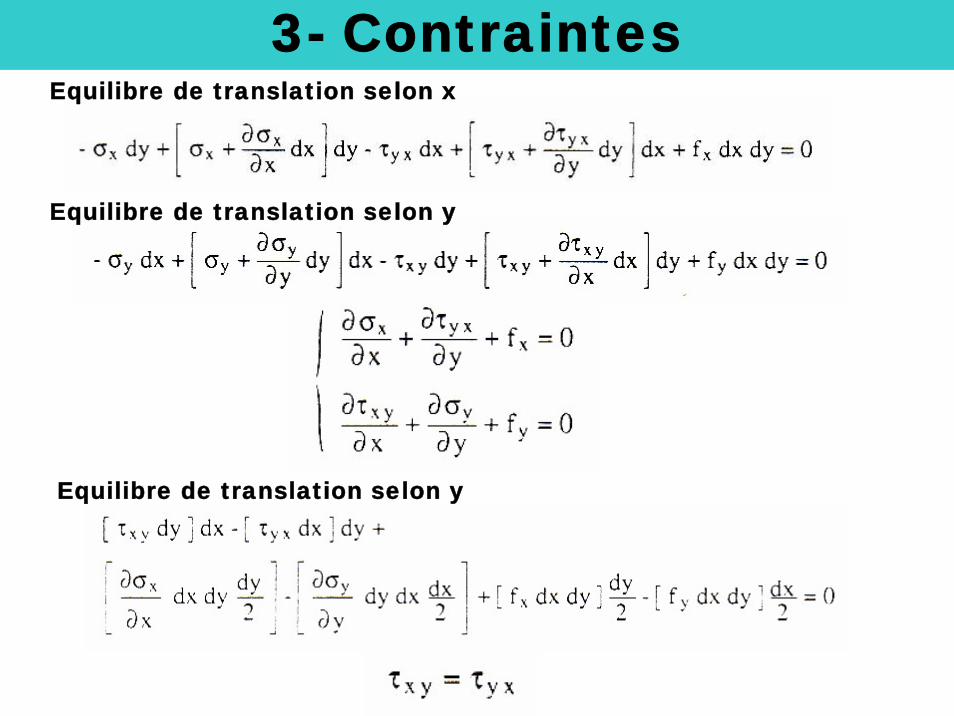
3- ContraintesEquilibre de translation selon x
Equilibre de translation selon y
Equilibre de translation selon y
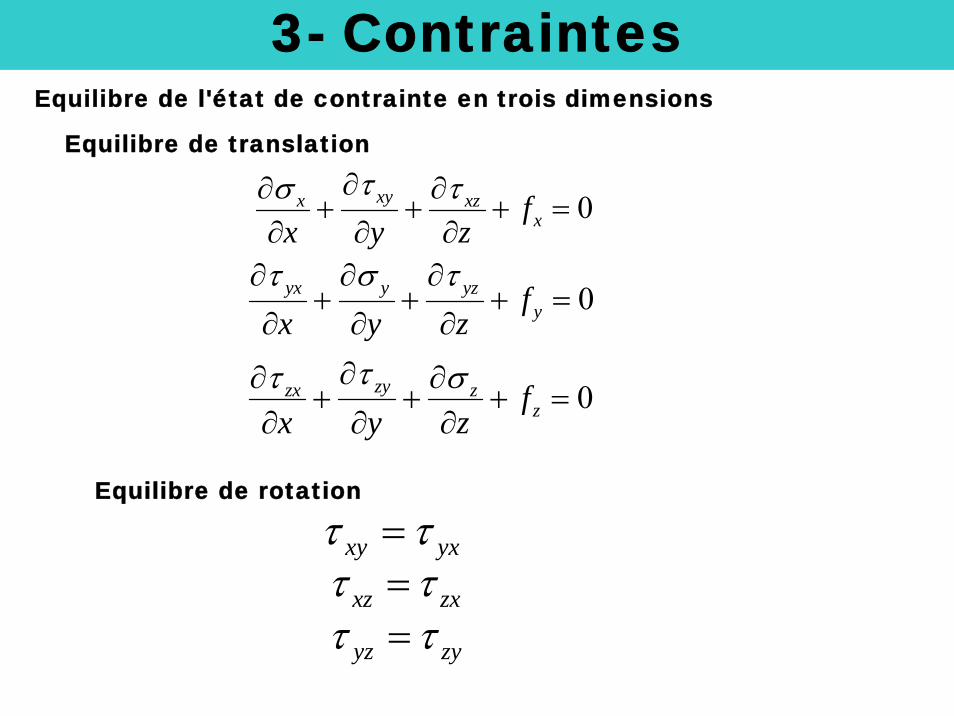
3- Contraintes
0xyx xzxfx y z
τσ τ∂∂ ∂+ + + =
∂ ∂ ∂
0yx y yzyfx y z
τ σ τ∂ ∂ ∂+ + + =
∂ ∂ ∂
0zyzx zzfx y z
ττ σ∂∂ ∂+ + + =
∂ ∂ ∂
xy yxτ τ=xz zxτ τ=yz zyτ τ=
Equilibre de l'état de contrainte en trois dimensions
Equilibre de translation
Equilibre de rotation
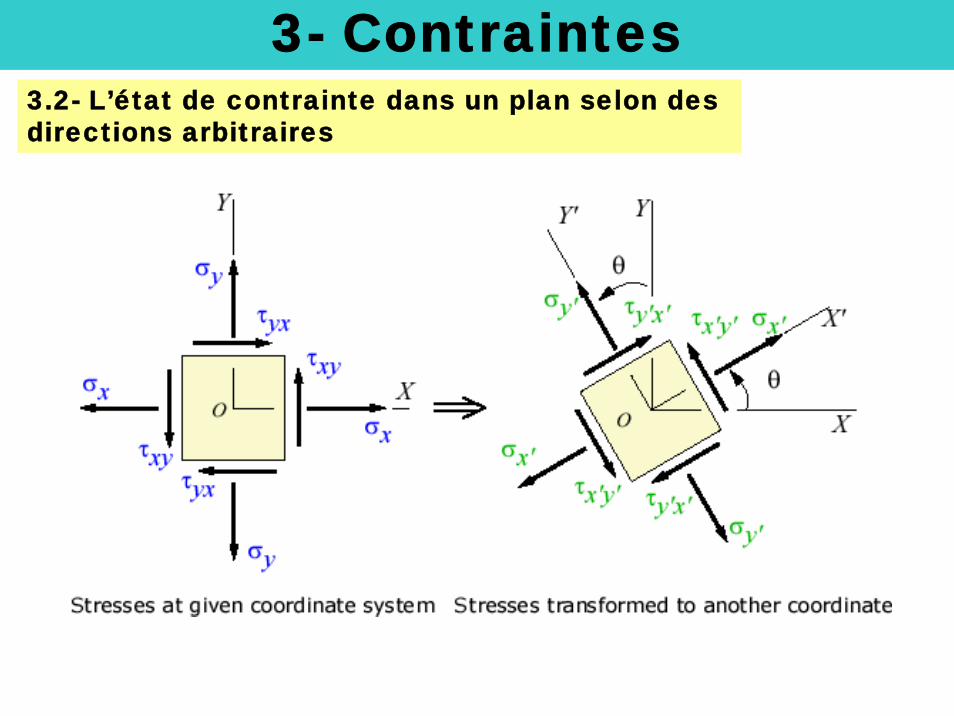
3- Contraintes3.2- L’état de contrainte dans un plan selon des directions arbitraires
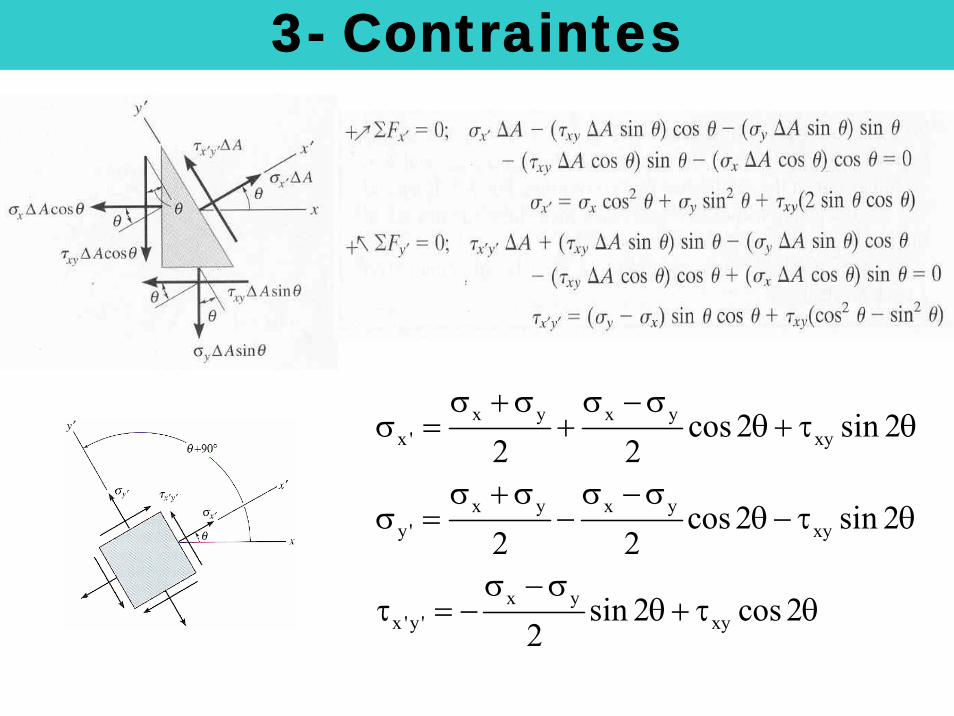
3- Contraintes
x y x yx ' xy
x y x yy ' xy
x yx 'y ' xy
cos 2 sin 22 2
cos 2 sin 22 2
sin 2 cos 22
σ +σ σ −σσ = + θ+ τ θ
σ +σ σ −σσ = − θ− τ θ
σ −στ = − θ+ τ θ
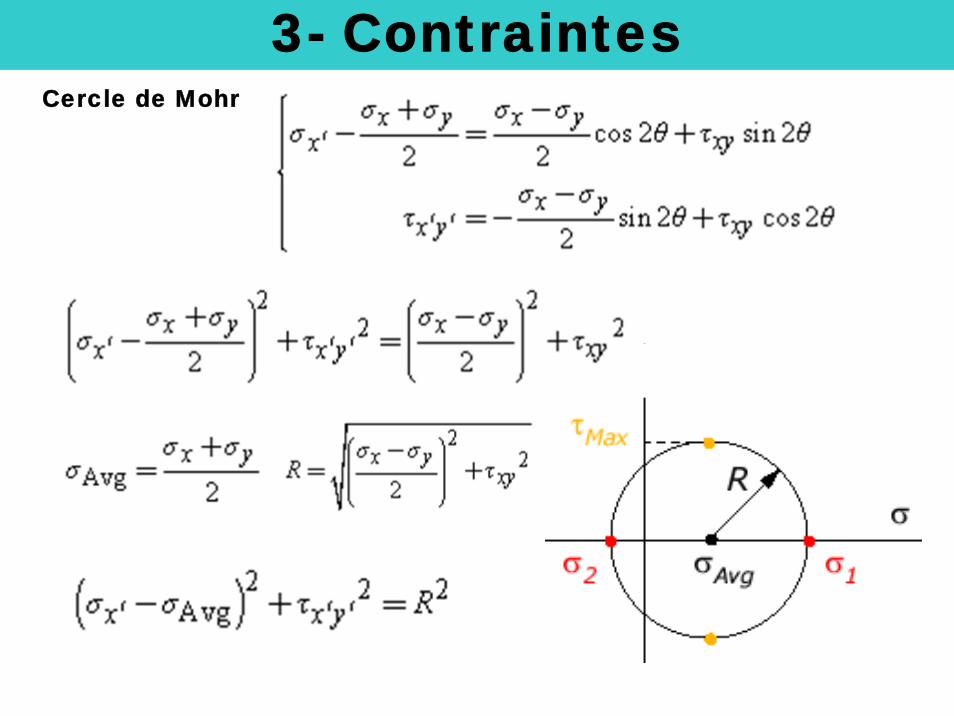
3- ContraintesCercle de Mohr
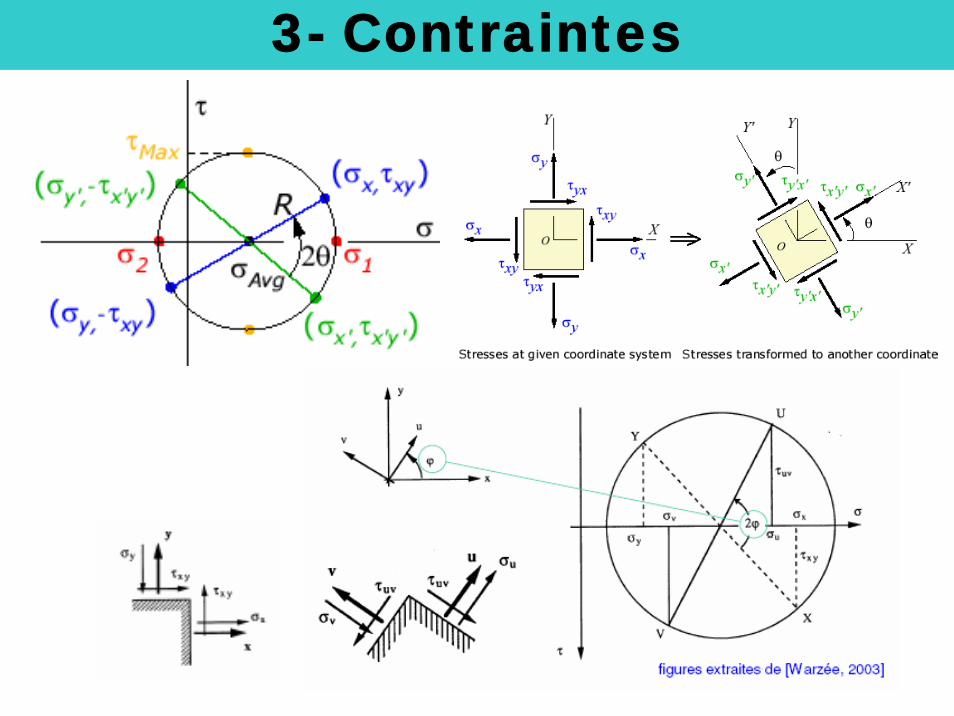
3- Contraintes
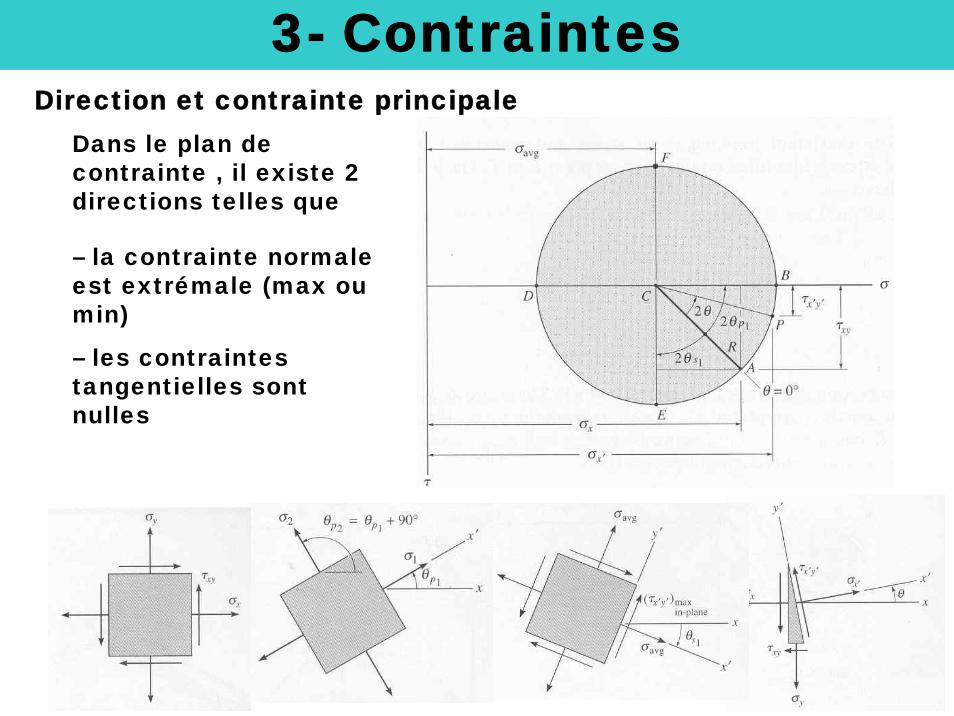
3- ContraintesDirection et contrainte principale
Dans le plan de contrainte , il existe 2 directions telles que
– la contrainte normale est extrémale (max ou min)
– les contraintes tangentielles sont nulles
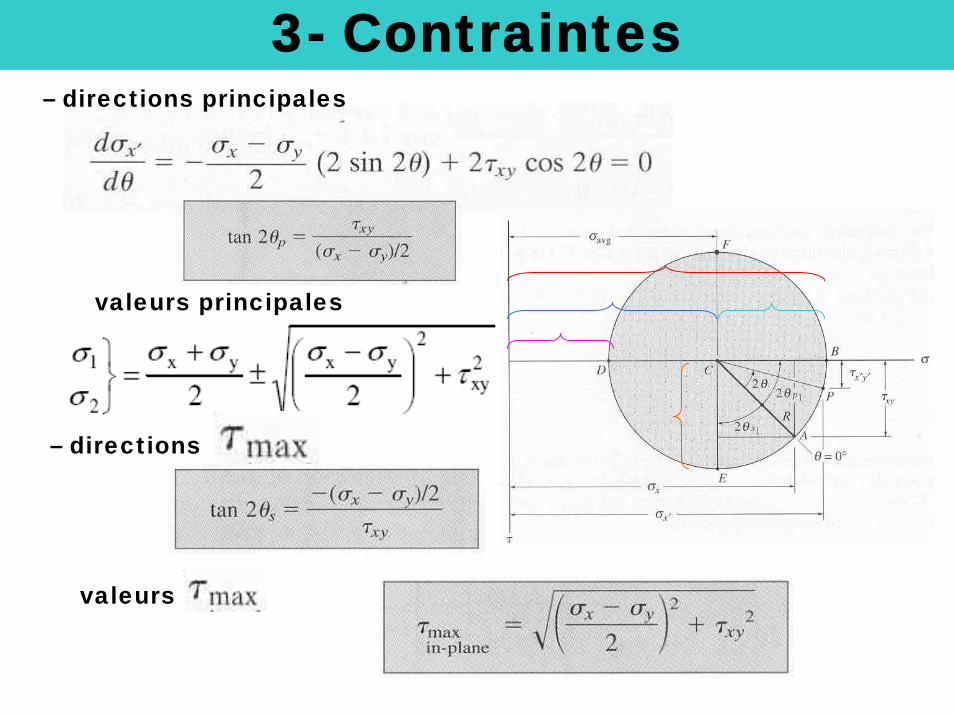
3- Contraintes– directions principales
valeurs principales
– directions
valeurs
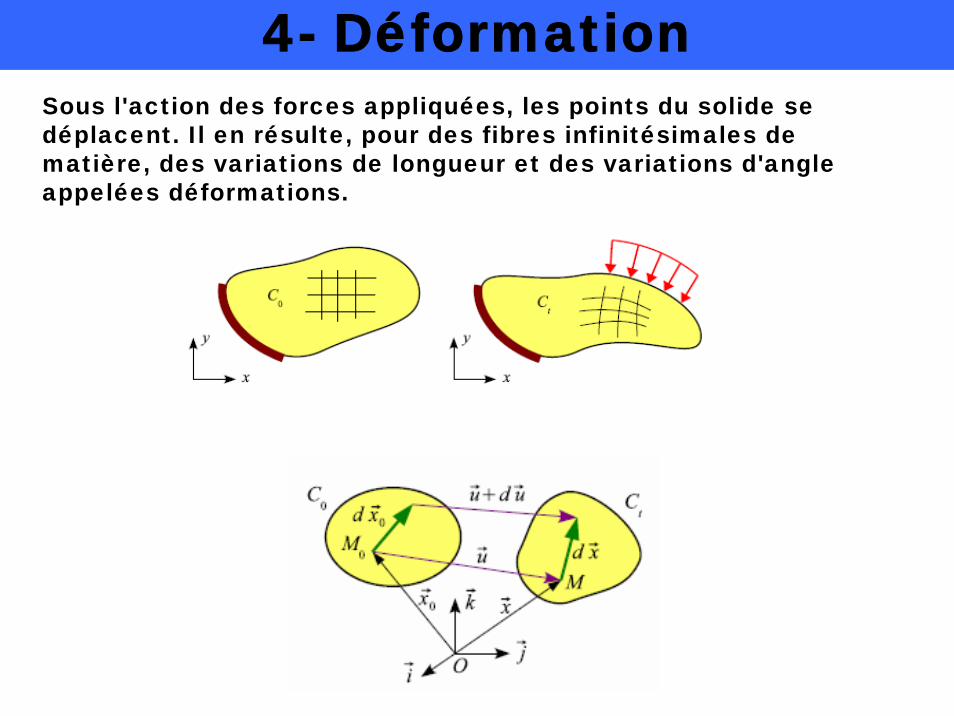
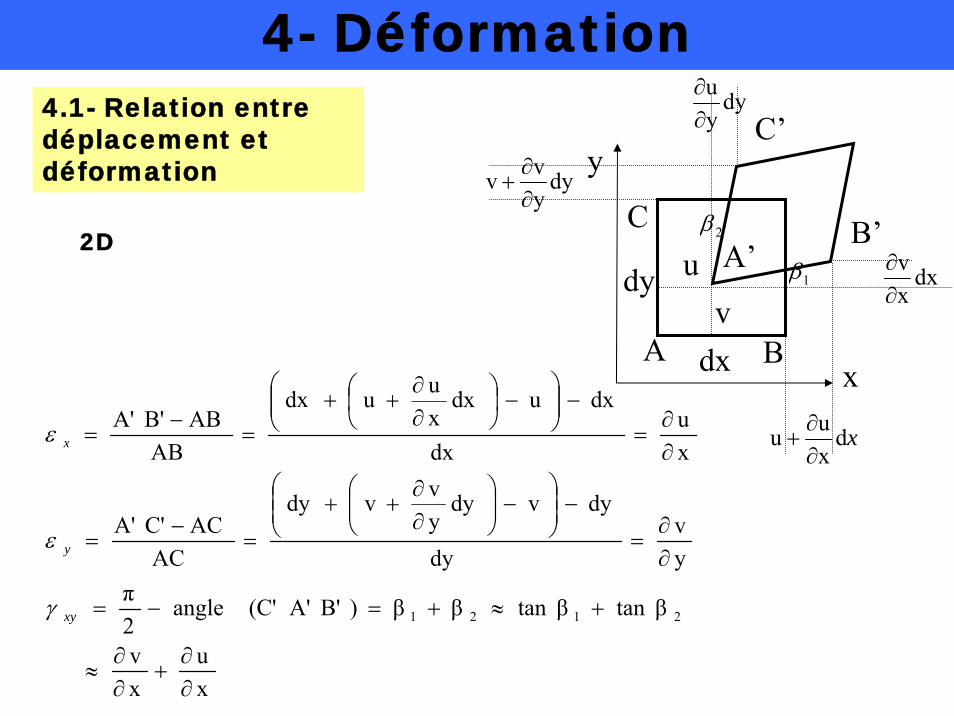
4- DéformationSous l'action des forces appliquées, les points du solide se déplacent. Il en résulte, pour des fibres infinitésimales de matière, des variations de longueur et des variations d'angle appelées déformations.
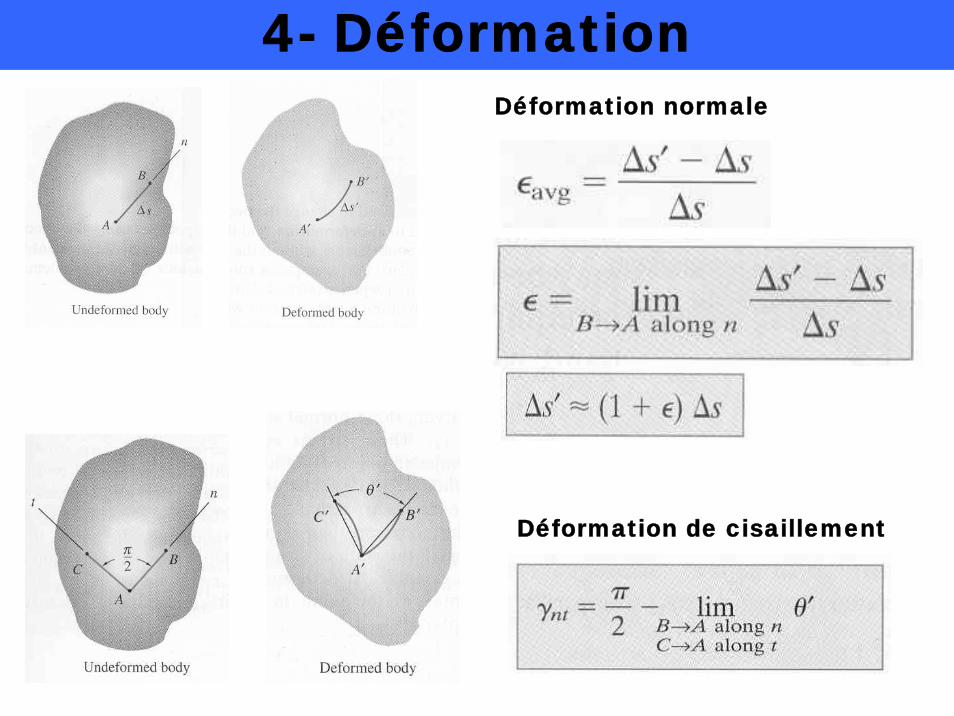
4- DéformationDéformation normale
Déformation de cisaillement
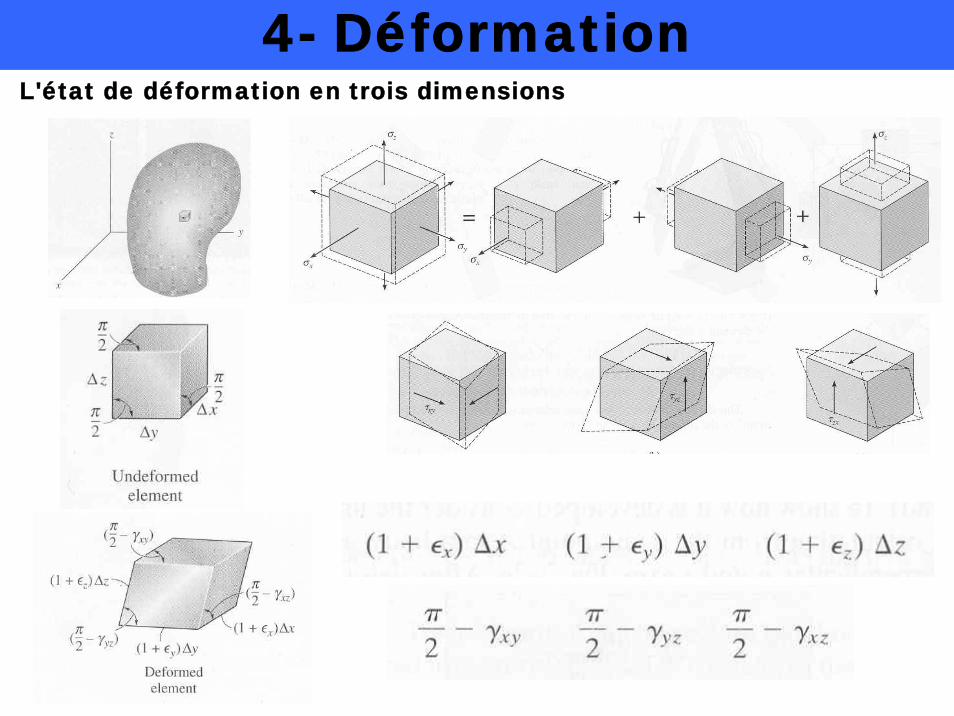
4- DéformationL'état de déformation en trois dimensions
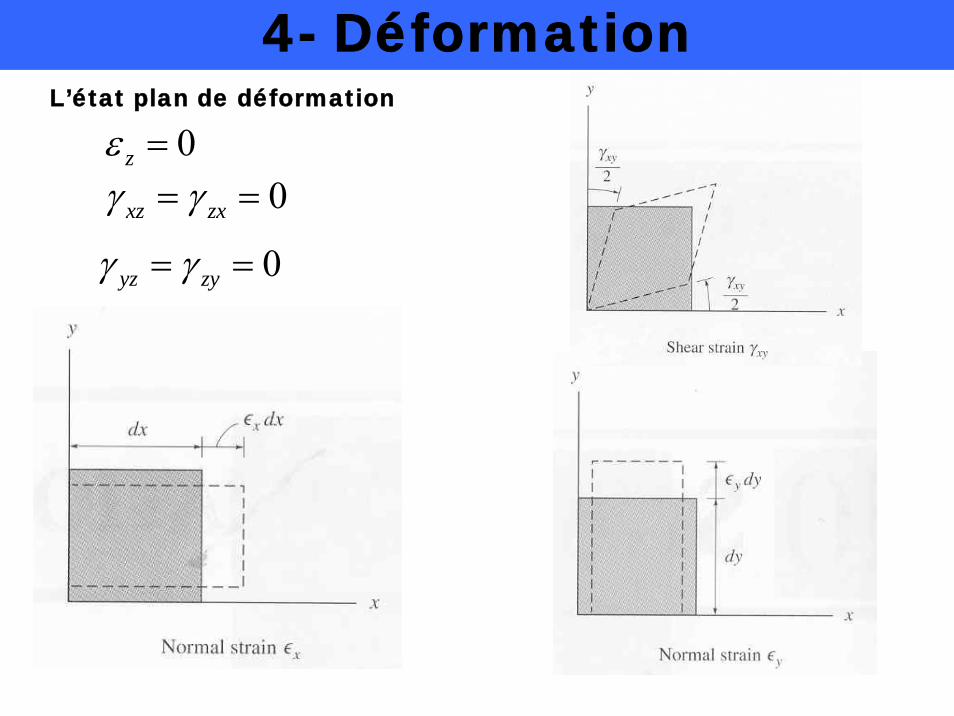
4- DéformationL’état plan de déformation
0zε =
0yz zyγ γ= =
0xz zxγ γ= =
4- Déformation
x
y
A B
CA’
B’
C’
vudy
dx
dxxv∂∂
xdxuu∂∂
+
dyyu∂∂
dyyvv∂∂
+
1β
2β
xu
xv
tan βtan βββ)B'A'(C'angle2π
yv
dy
dyvdyyvvdy
ACACC'A'
xu
dx
dxudxxuudx
ABABB'A'
2121
∂∂
+∂∂
≈
+≈+=−=
∂∂
=
−⎟⎟⎠
⎞⎜⎜⎝
⎛−⎟⎟
⎠
⎞⎜⎜⎝
⎛∂∂
++
=−
=
∂∂
=−⎟⎟
⎠
⎞⎜⎜⎝
⎛−⎟
⎠⎞
⎜⎝⎛
∂∂
++=
−=
xy
y
x
γ
ε
ε
4.1- Relation entre déplacement et déformation
2D
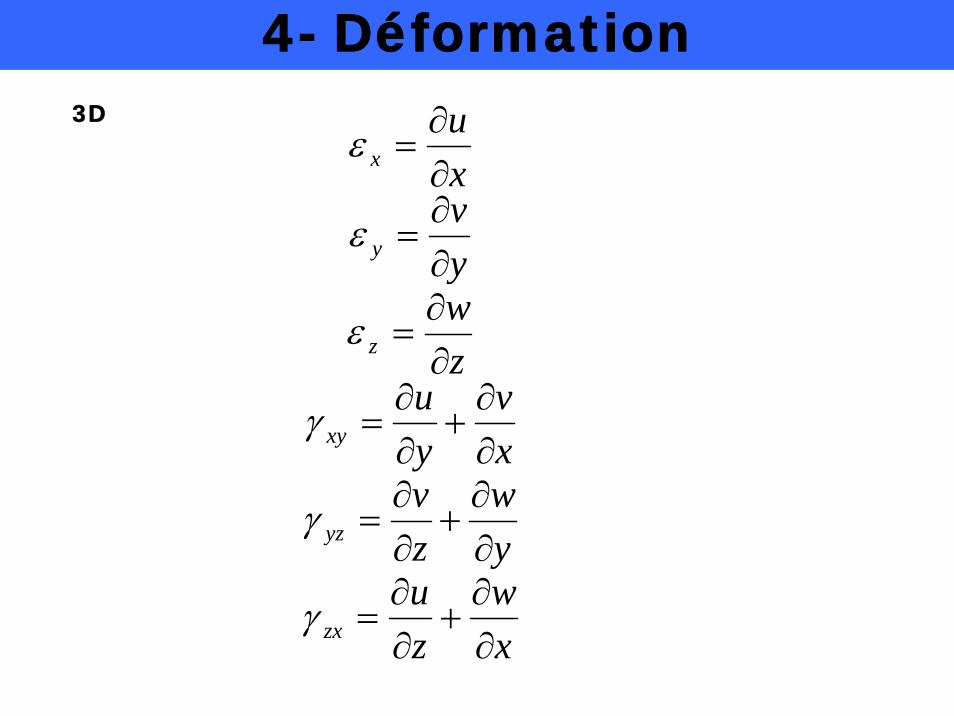
4- Déformation3D
xw
zu
yw
zv
xv
yu
zwyvxu
zx
yz
xy
z
y
x
∂∂
+∂∂
=
∂∂
+∂∂
=
∂∂
+∂∂
=
∂∂
=
∂∂
=
∂∂
=
γ
γ
γ
ε
ε
ε
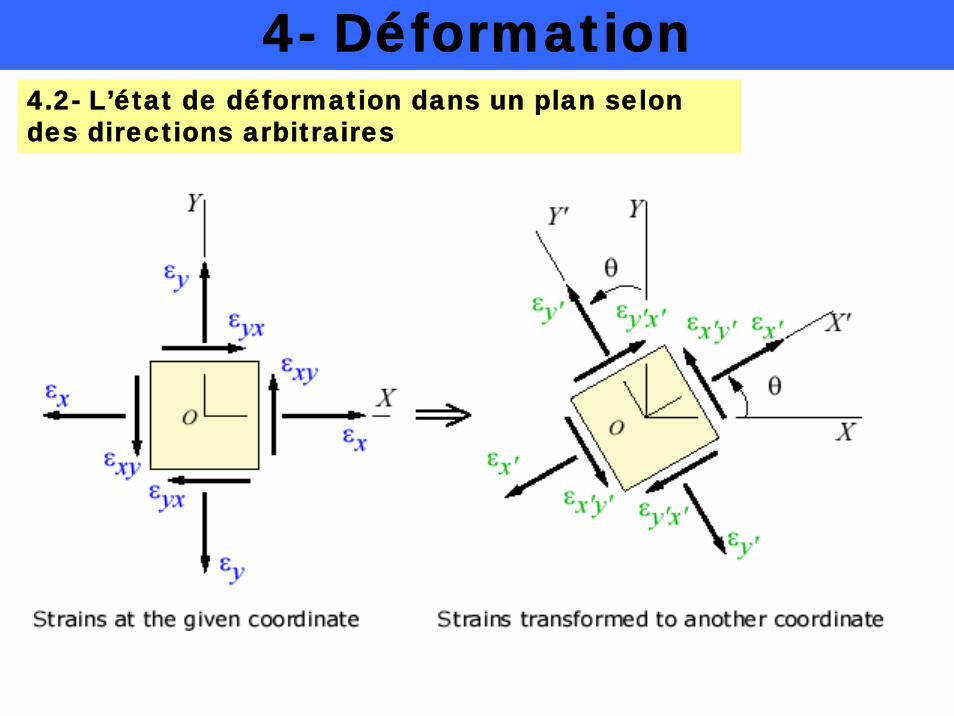
4- Déformation4.2- L’état de déformation dans un plan selon des directions arbitraires
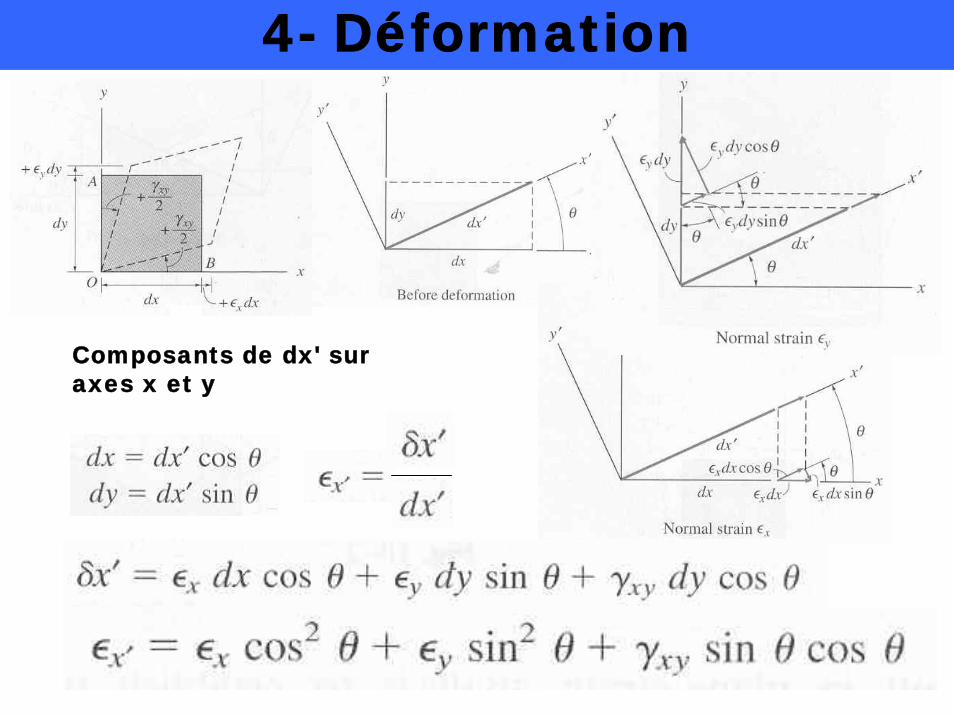
4- Déformation
Composants de dx' sur axes x et y
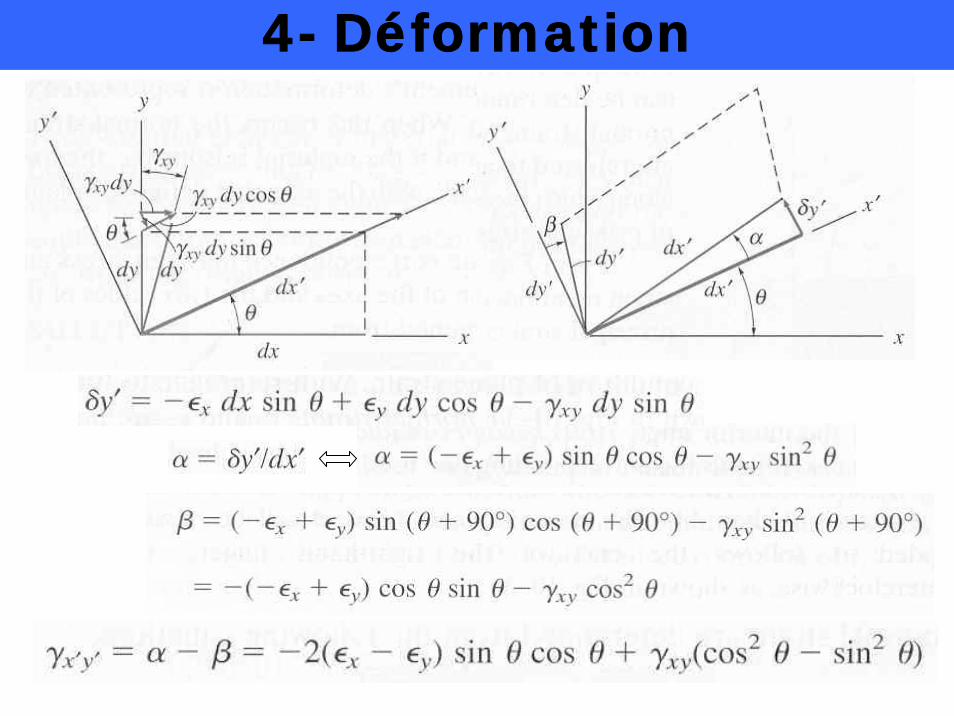
4- Déformation
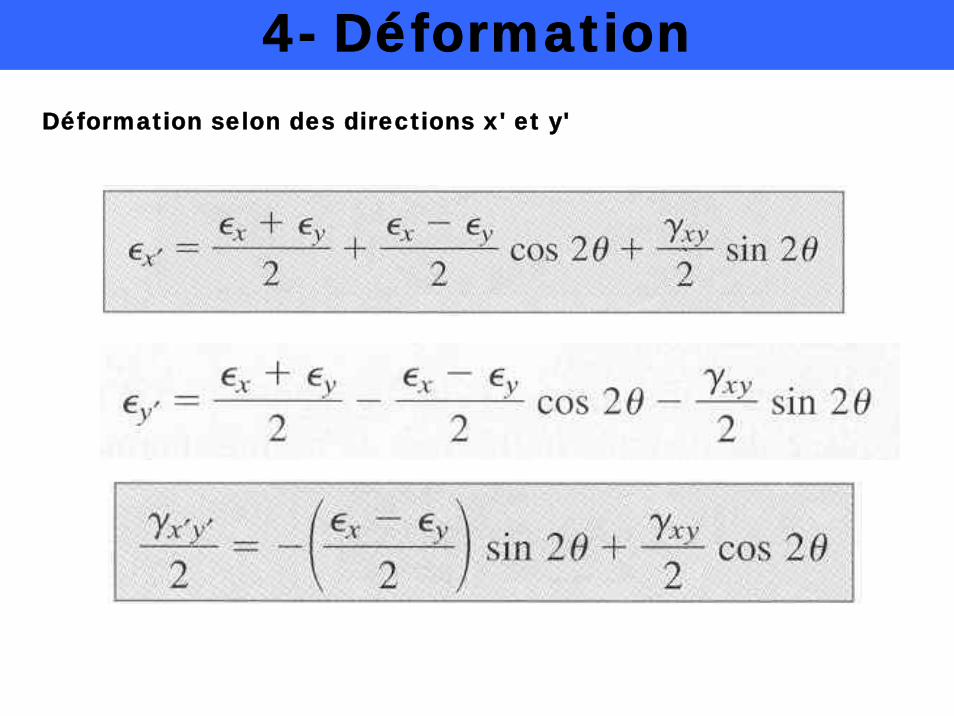
4- DéformationDéformation selon des directions x' et y'
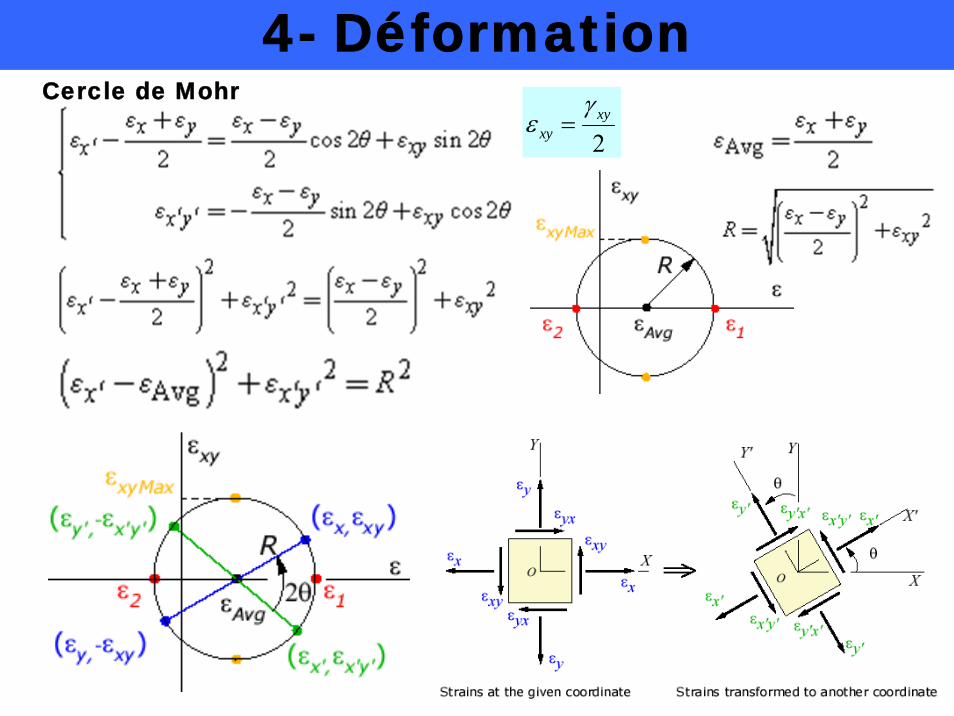
4- DéformationCercle de Mohr
2xy
xy
γε =
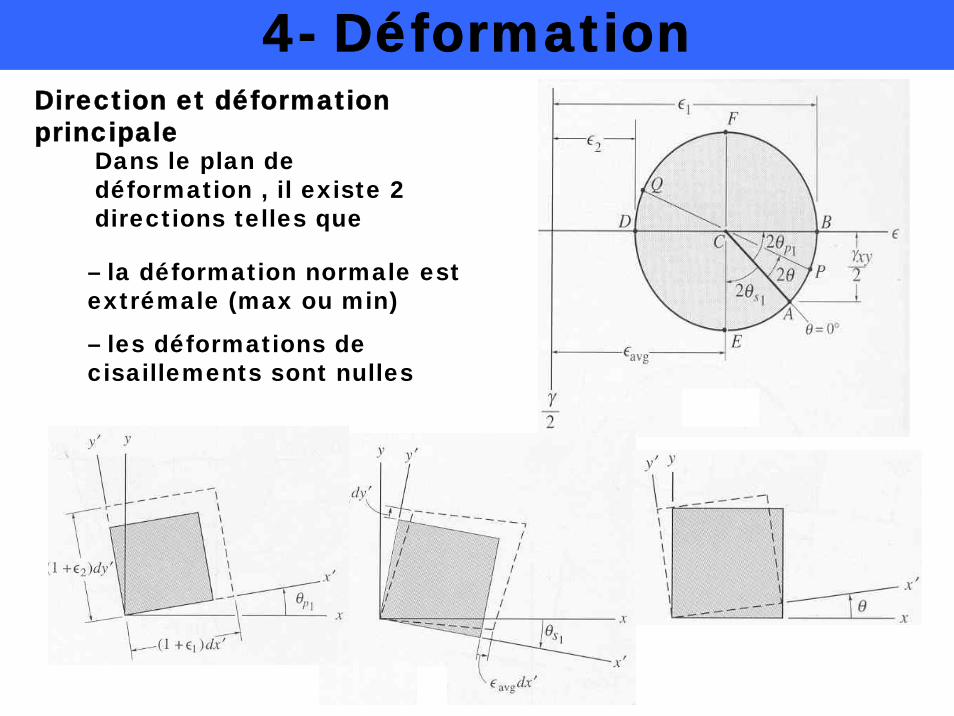
4- DéformationDirection et déformation principale
Dans le plan de déformation , il existe 2 directions telles que
– la déformation normale est extrémale (max ou min)
– les déformations de cisaillements sont nulles
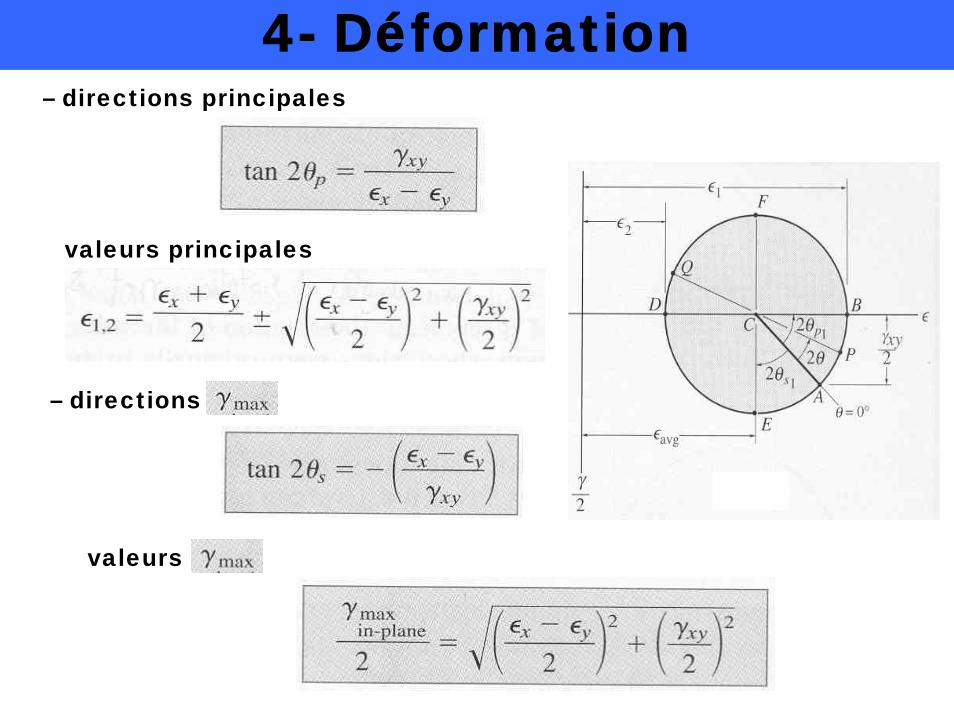
4- Déformation– directions principales
valeurs principales
– directions
valeurs
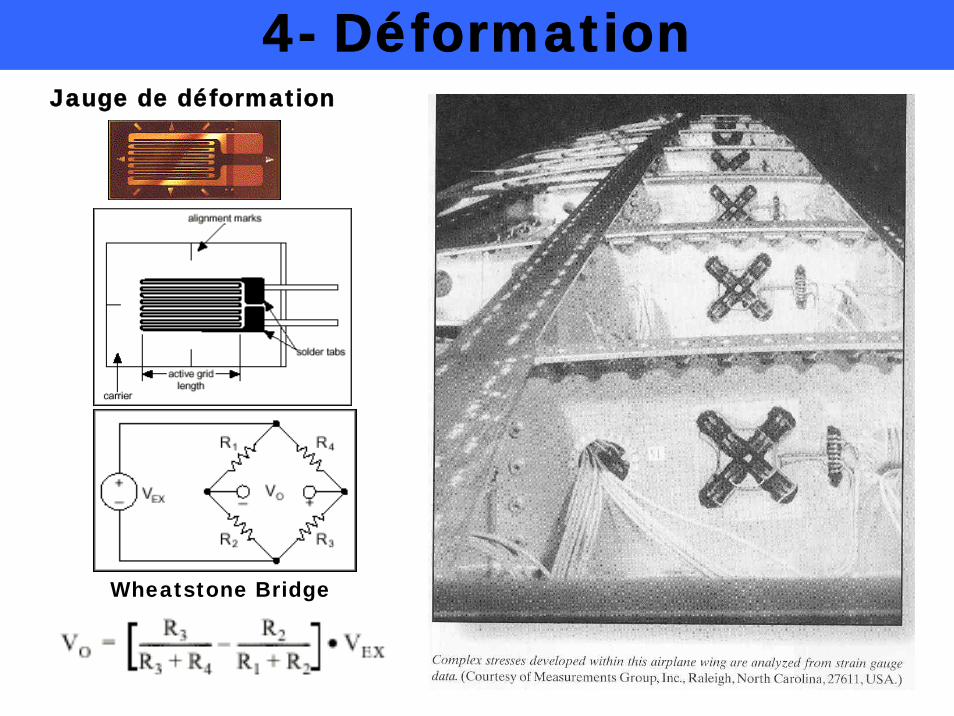
4- DéformationJauge de déformation
Wheatstone Bridge
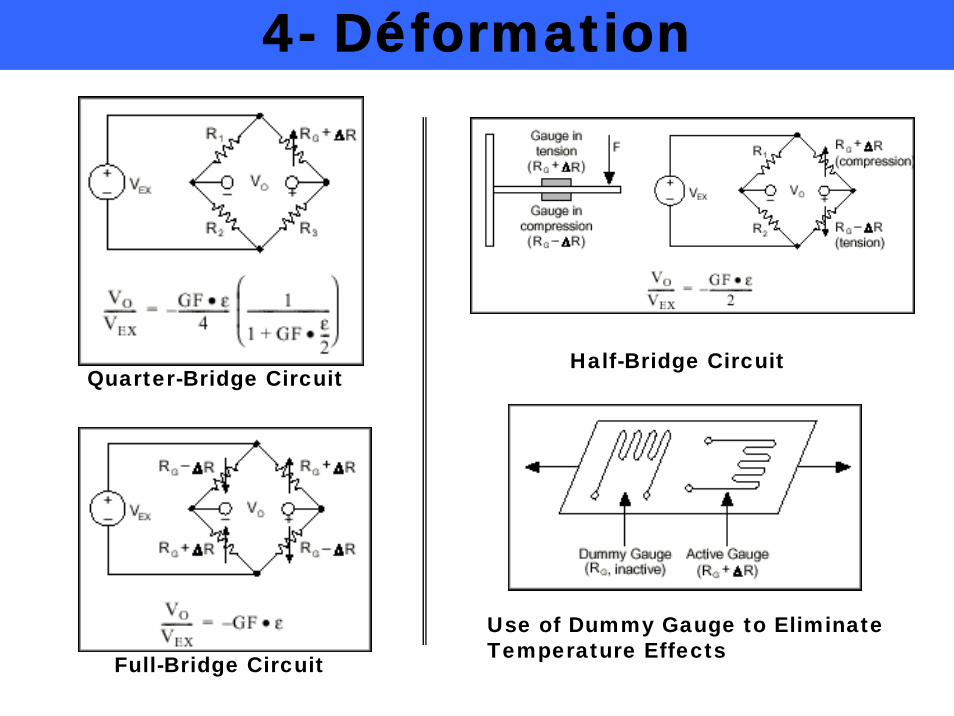
4- Déformation
Quarter-Bridge Circuit Half-Bridge Circuit
Full-Bridge Circuit
Use of Dummy Gauge to Eliminate Temperature Effects
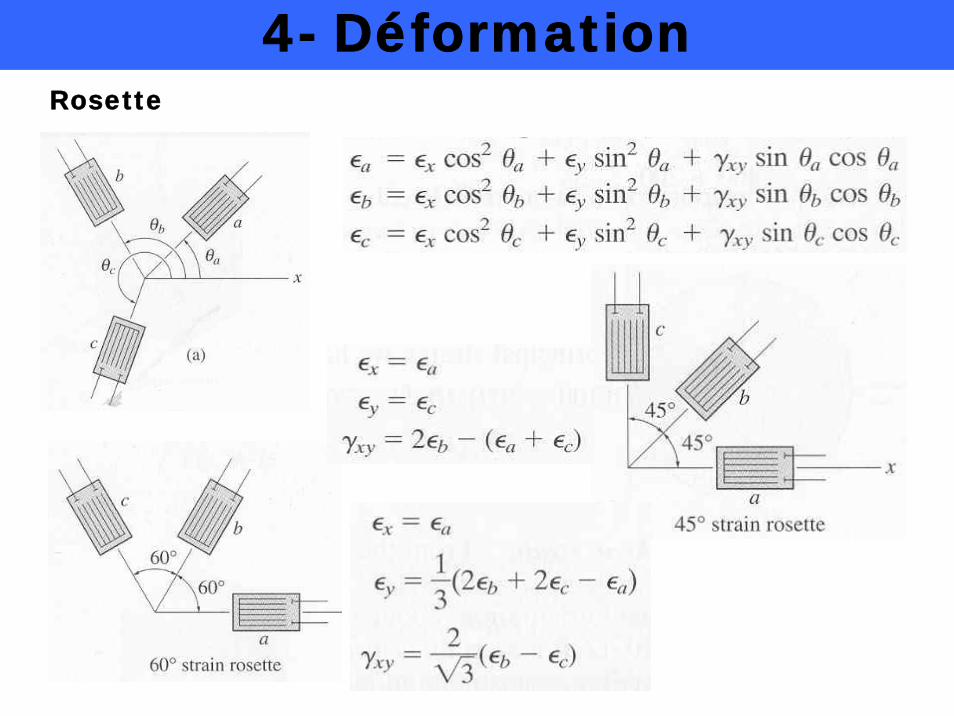
4- DéformationRosette
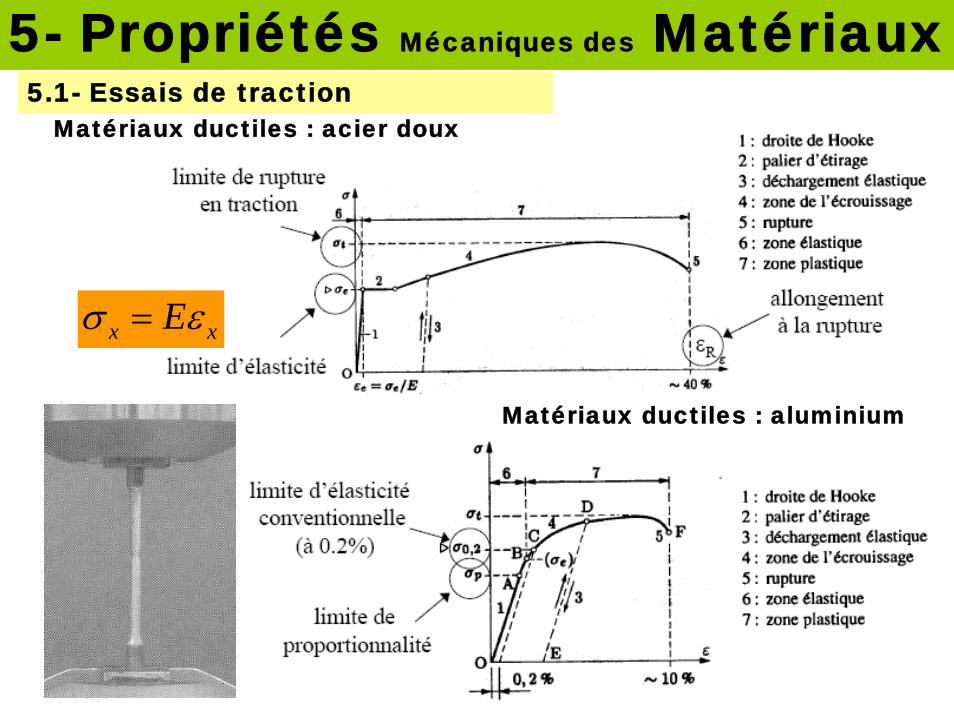
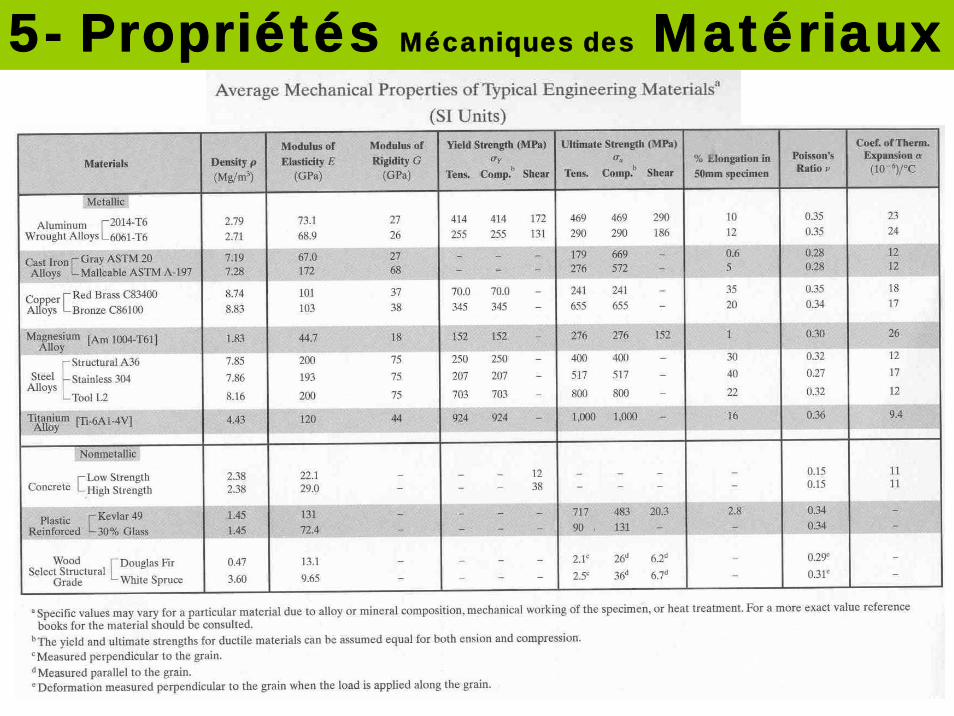
5- Propriétés Mécaniques des Matériaux5.1- Essais de traction
Matériaux ductiles : acier doux
Matériaux ductiles : aluminium
x xEσ ε=
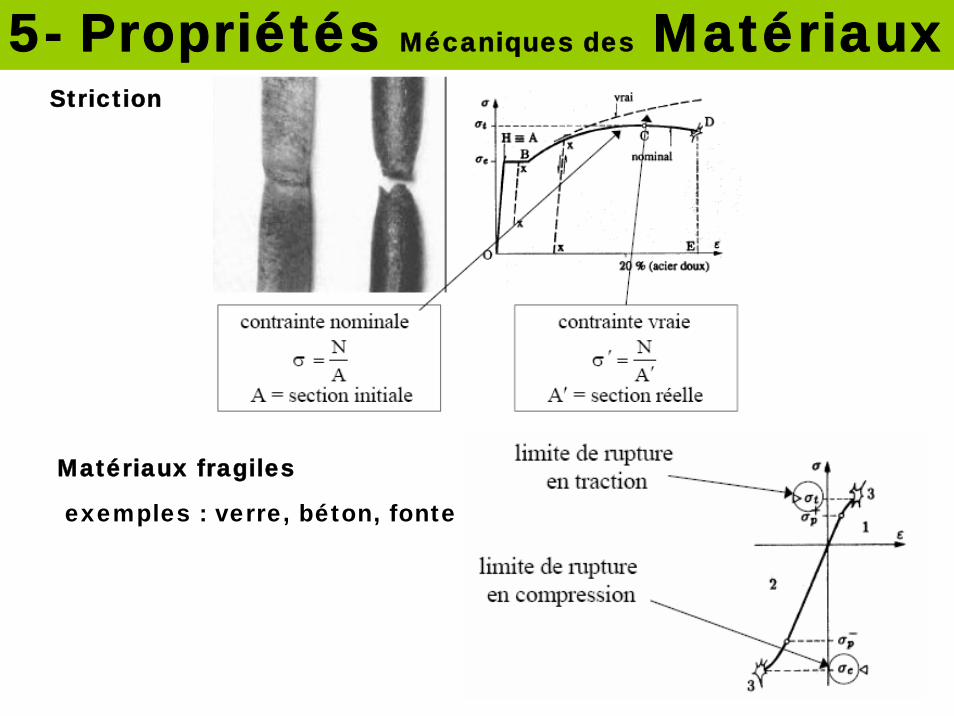
5- Propriétés Mécaniques des MatériauxStriction
Matériaux fragiles
exemples : verre, béton, fonte
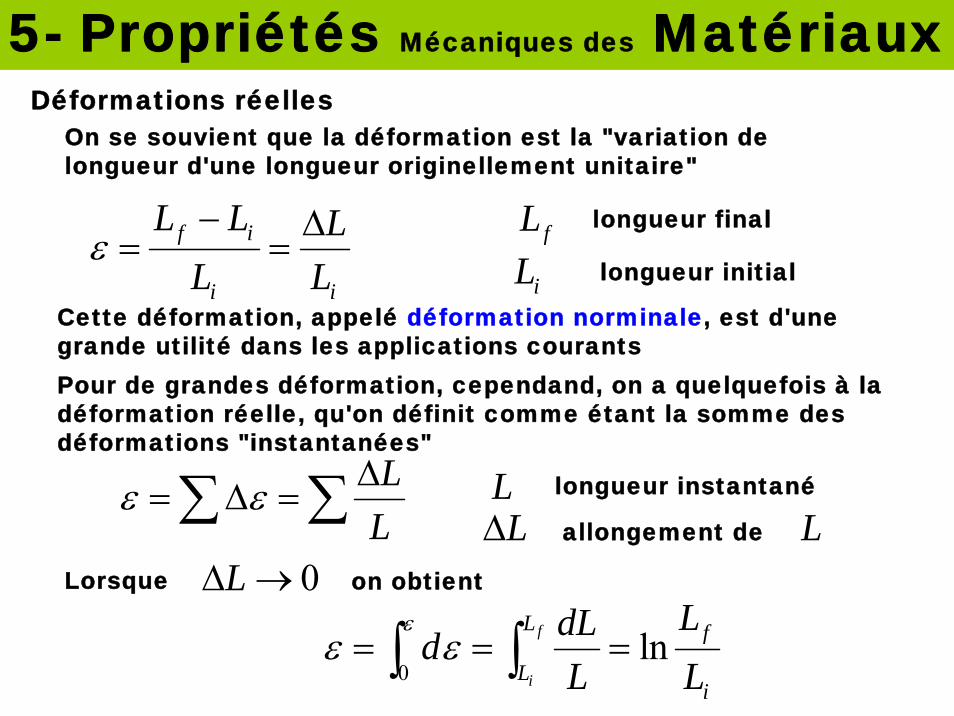
5- Propriétés Mécaniques des Matériaux
On se souvient que la déformation est la "variation de longueur d'une longueur originellement unitaire"
f i
i i
L L LL L
ε− Δ
= = fL
iLlongueur final
longueur initial
Cette déformation, appelé déformation norminale, est d'une grande utilité dans les applications courants
Déformations réelles
Pour de grandes déformation, cependand, on a quelquefois à la déformation réelle, qu'on définit comme étant la somme des déformations "instantanées"
LL
ε ε Δ= Δ =∑ ∑ L longueur instantané
LΔ Lallongement de
0LΔ →
0lnf
i
L f
Li
LdLdL L
εε ε= = =∫ ∫
on obtientLorsque
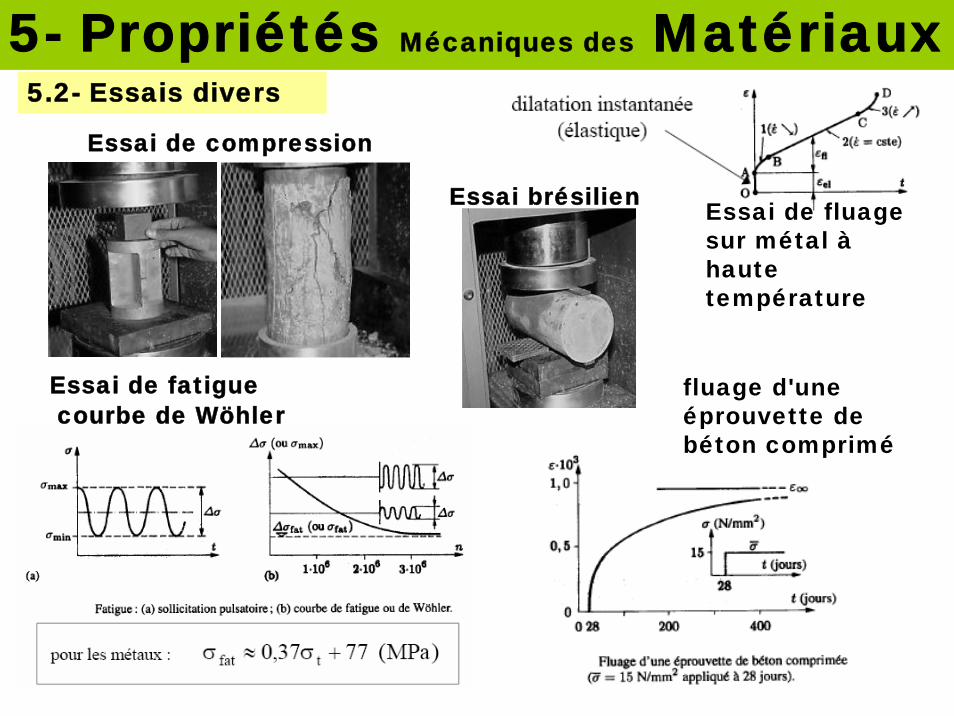
5- Propriétés Mécaniques des Matériaux5.2- Essais divers
Essai de compression
Essai de fatiguecourbe de Wöhler
Essai de fluage sur métal àhaute température
fluage d'une éprouvette de béton comprimé
Essai brésilien
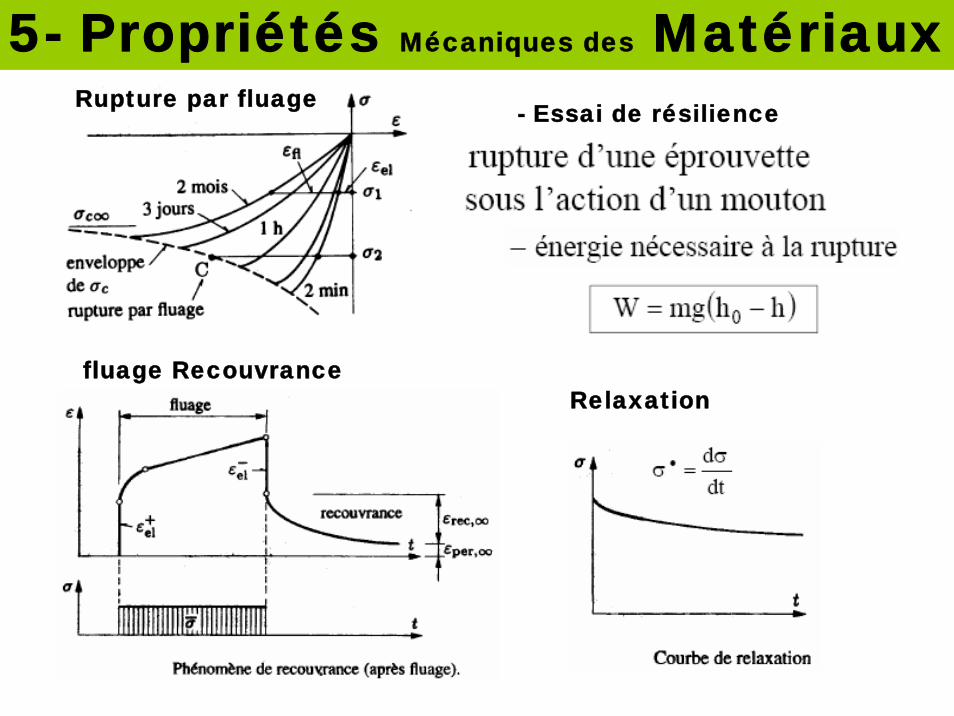
5- Propriétés Mécaniques des MatériauxRupture par fluage
fluage RecouvranceRelaxation
- Essai de résilience
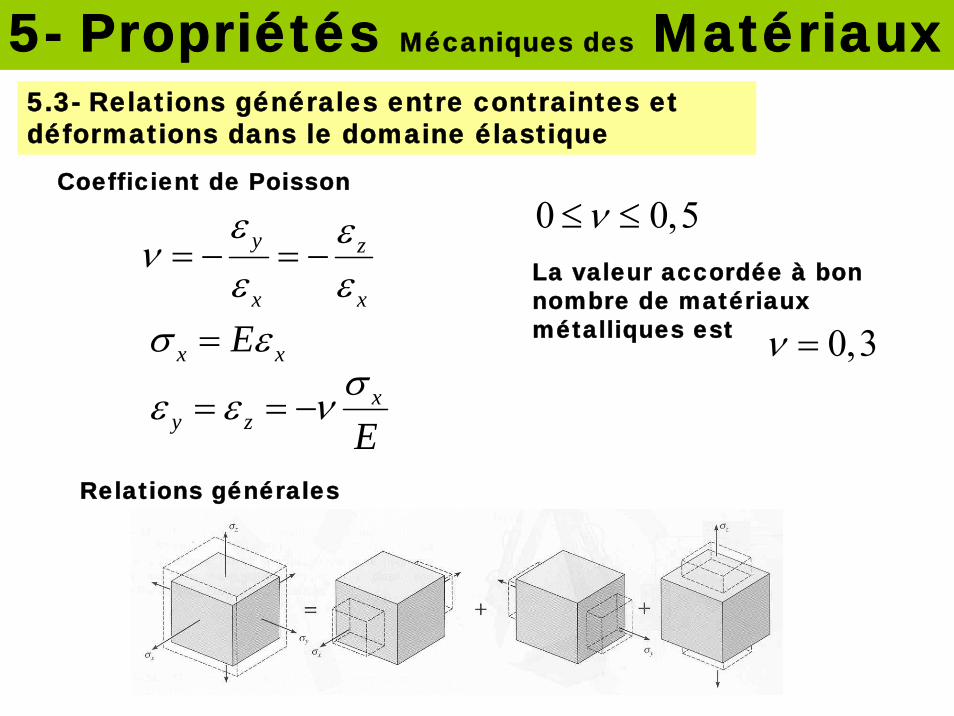
5- Propriétés Mécaniques des Matériaux5.3- Relations générales entre contraintes et déformations dans le domaine élastique
Coefficient de Poisson
y z
x x
ε ενε ε
= − = −
x xEσ ε=
0 0,5ν≤ ≤
0,3ν =
La valeur accordée à bon nombre de matériaux métalliques est
xy z E
σε ε ν= = −
Relations générales
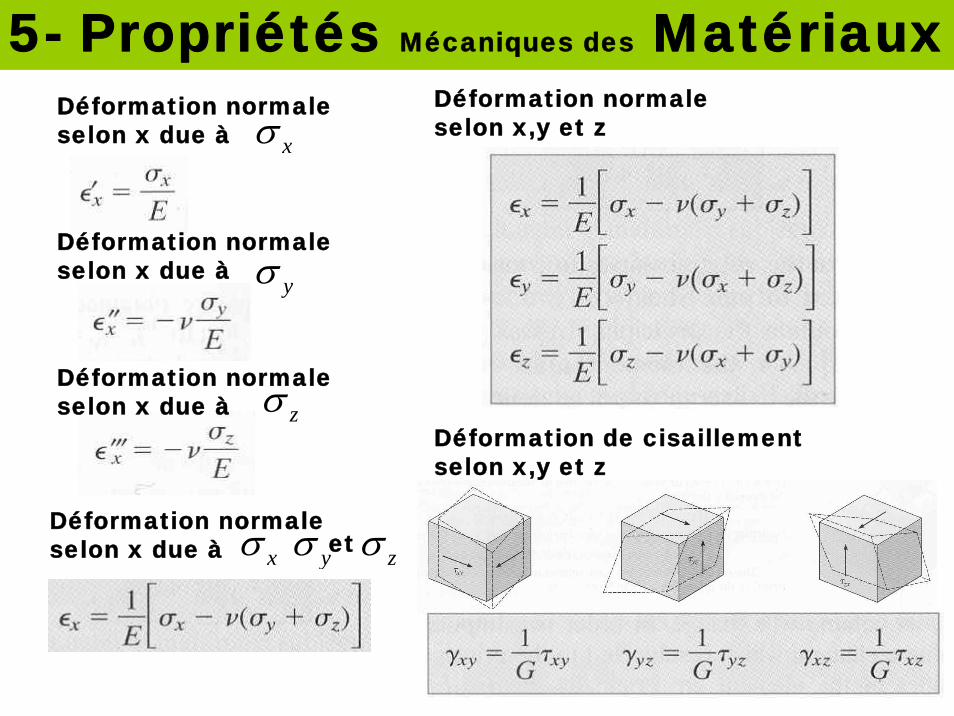
5- Propriétés Mécaniques des MatériauxDéformation normale selon x due à xσ
Déformation normale selon x due à yσ
Déformation normale selon x due à zσxσ
Déformation normale selon x due à zσ
yσ
Déformation normale selon x,y et z
et
Déformation de cisaillement selon x,y et z
5- Propriétés Mécaniques des Matériaux
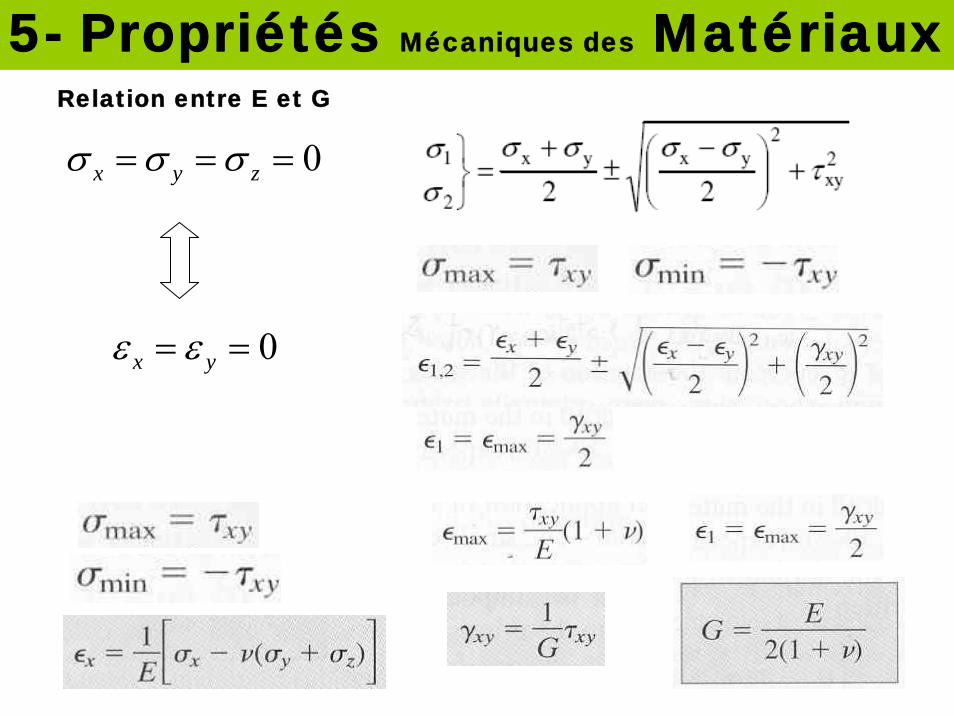
0x y zσ σ σ= = =
Relation entre E et G
0x yε ε= =
5- Propriétés Mécaniques des Matériaux
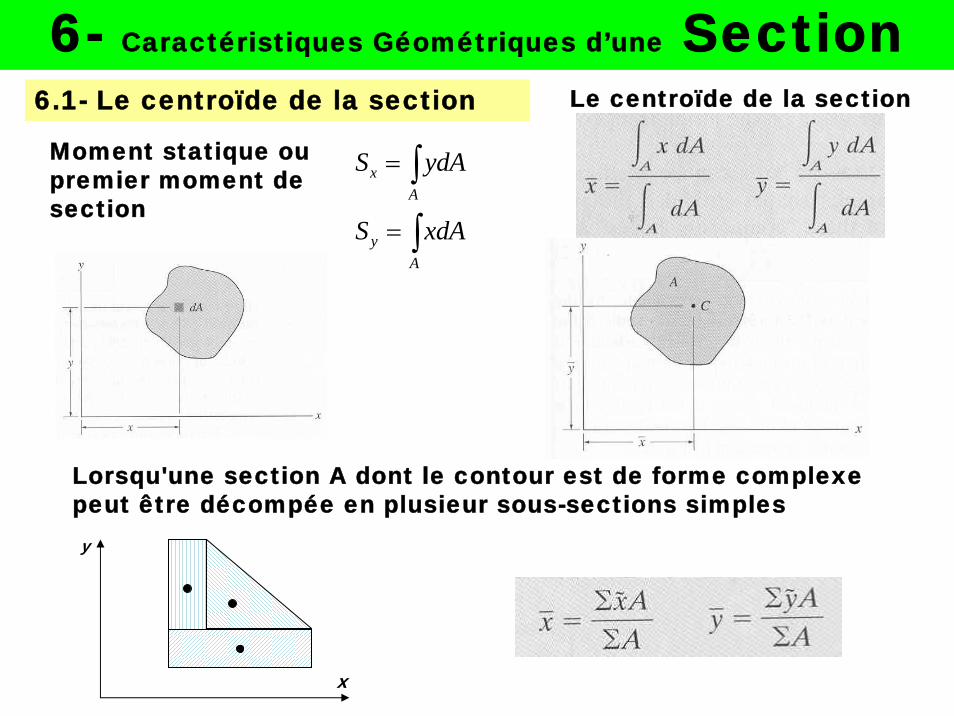
6- Caractéristiques Géométriques d’une Section6.1- Le centroïde de la section
xA
yA
S ydA
S xdA
=
=
∫
∫
Moment statique ou premier moment de section
Lorsqu'une section A dont le contour est de forme complexe peut être décompée en plusieur sous-sections simples
Le centroïde de la section
x
y
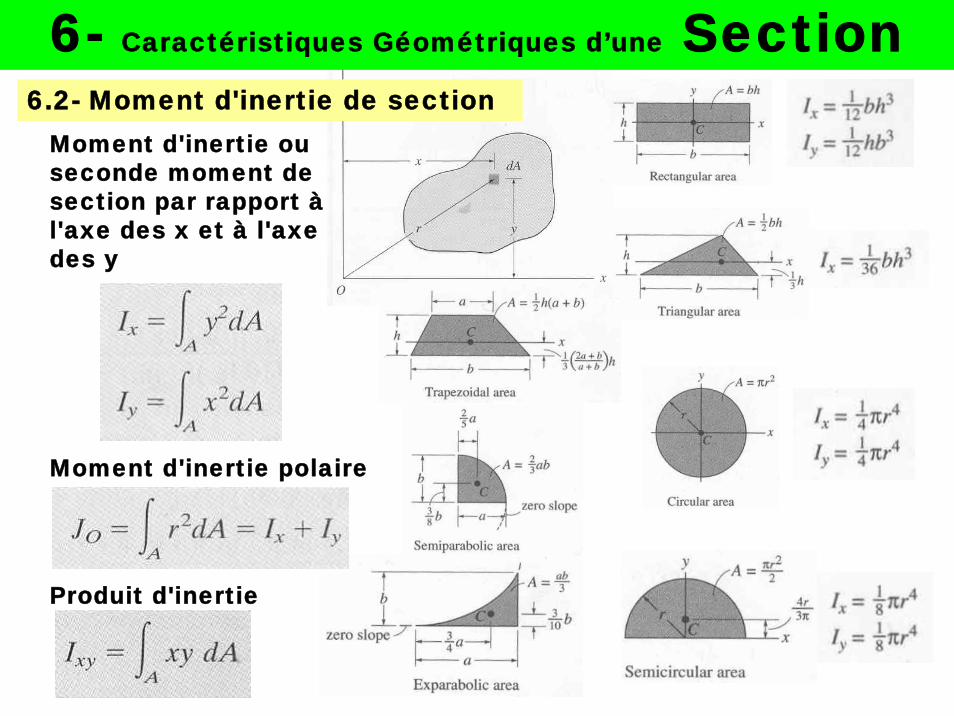
6- Caractéristiques Géométriques d’une Section6.2- Moment d'inertie de section
Moment d'inertie ou seconde moment de section par rapport àl'axe des x et à l'axe des y
Produit d'inertie
Moment d'inertie polaire
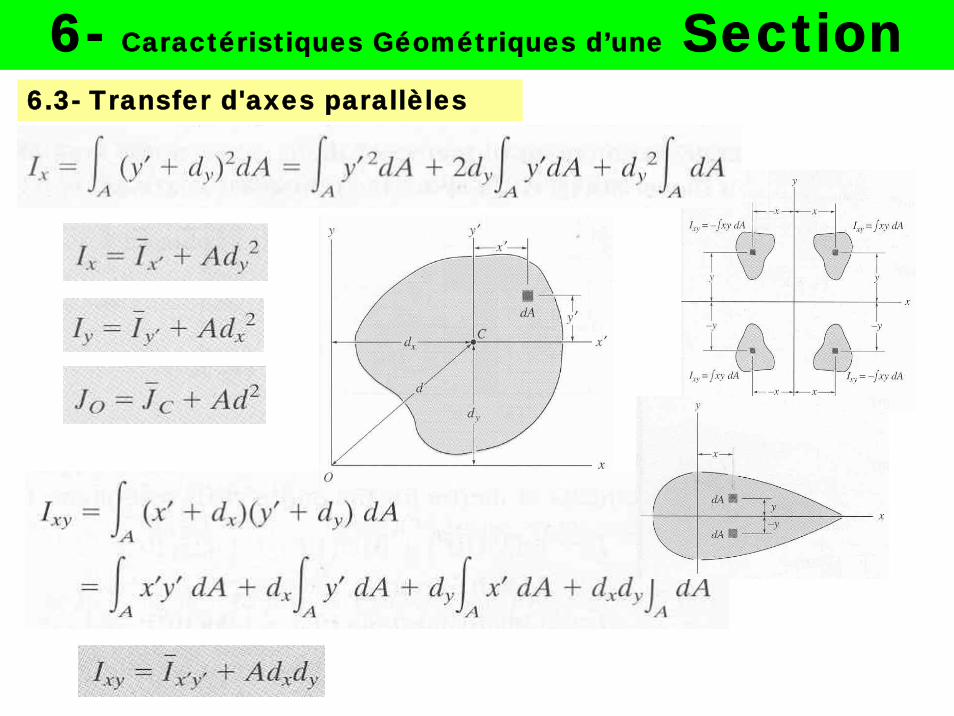
6- Caractéristiques Géométriques d’une Section6.3- Transfer d'axes parallèles
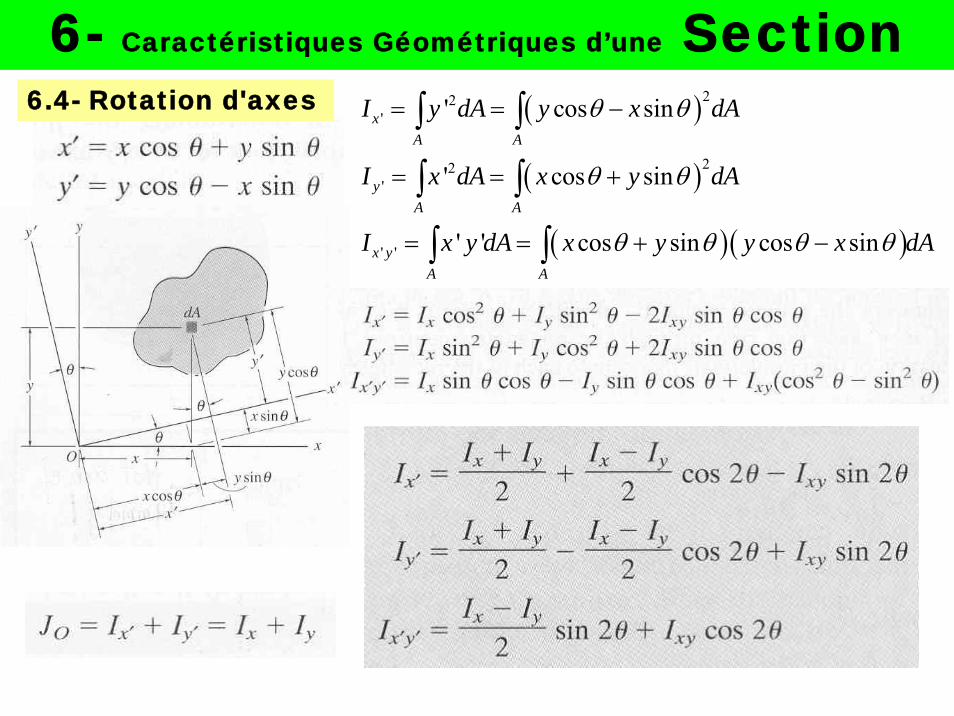
6- Caractéristiques Géométriques d’une Section( )
( )
( )( )
22'
22'
' '
' cos sin
' cos sin
' ' cos sin cos sin
xA A
yA A
x yA A
I y dA y x dA
I x dA x y dA
I x y dA x y y x dA
θ θ
θ θ
θ θ θ θ
= = −
= = +
= = + −
∫ ∫
∫ ∫
∫ ∫
6.4- Rotation d'axes
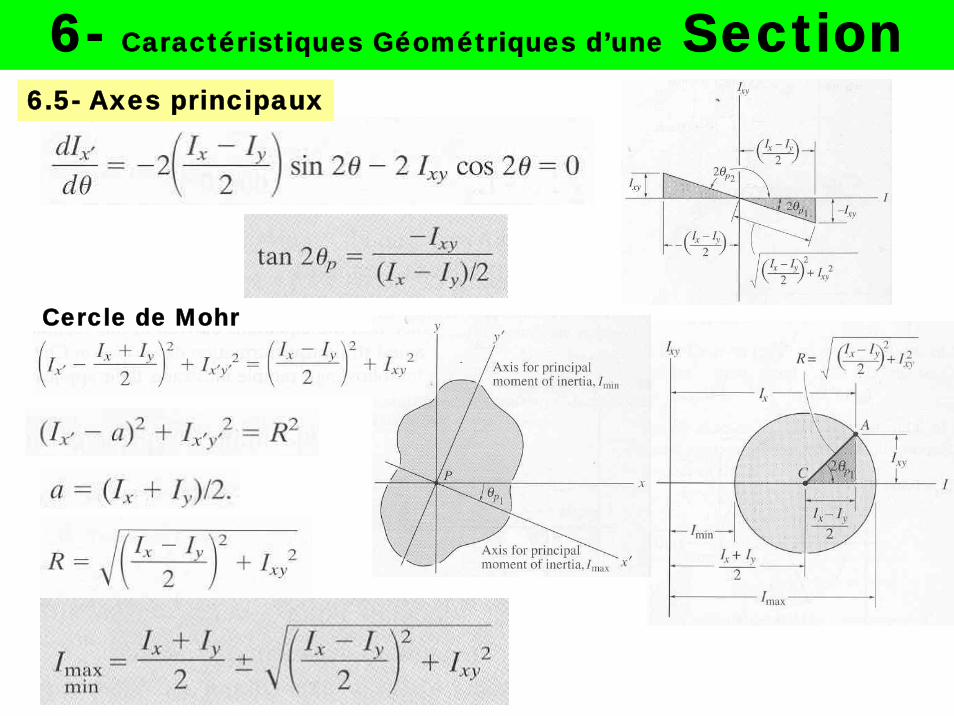
6- Caractéristiques Géométriques d’une Section6.5- Axes principaux
Cercle de Mohr
6- Caractéristiques Géométriques d’une Section
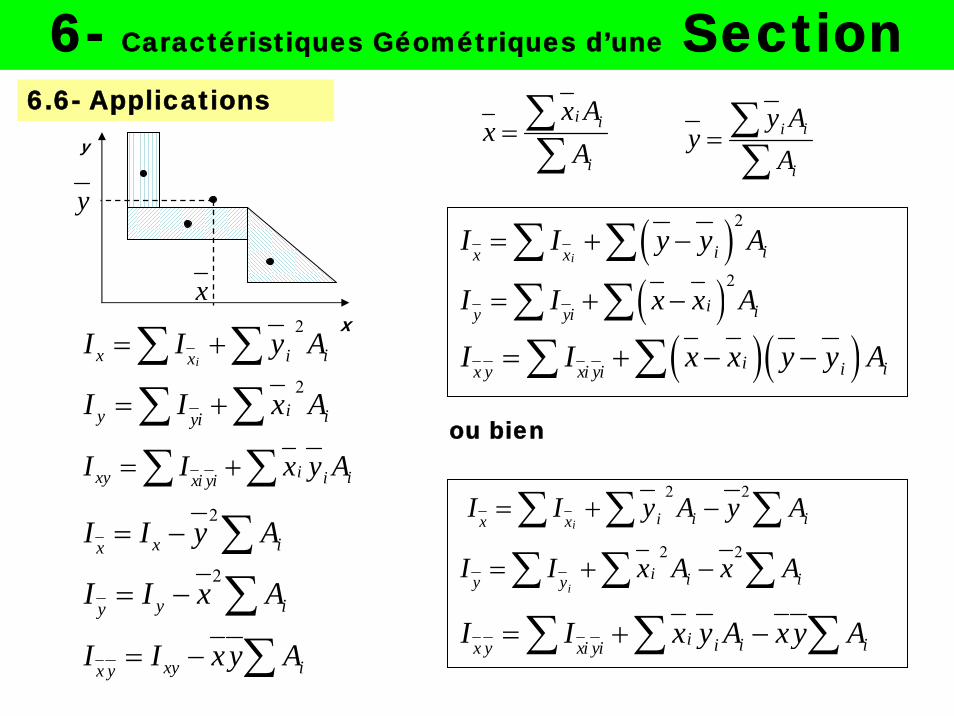
x
i i
i
x Ax
A= ∑∑
2
ix iixI I y A= +∑ ∑2
iy iyiI I x A= +∑ ∑ixy iixi yiI I x y A= +∑ ∑
ii
i
y Ay
A= ∑∑
2
x ixI I y A= − ∑2
y iyI I x A= − ∑xy ix yI I x y A= − ∑
6.6- Applications
( )2
i iix xI I y y A= + −∑ ∑( )2
i iy yiI I x x A= + −∑ ∑( )( )i iix y xi yiI I x x y y A= + − −∑ ∑
2 2
i i iix xI I y A y A= + −∑ ∑ ∑2 2
ii i iy yI I x A x A= + −∑ ∑ ∑
i i iix y xi yiI I x y A xy A= + −∑ ∑ ∑
ou bien
y
x
y
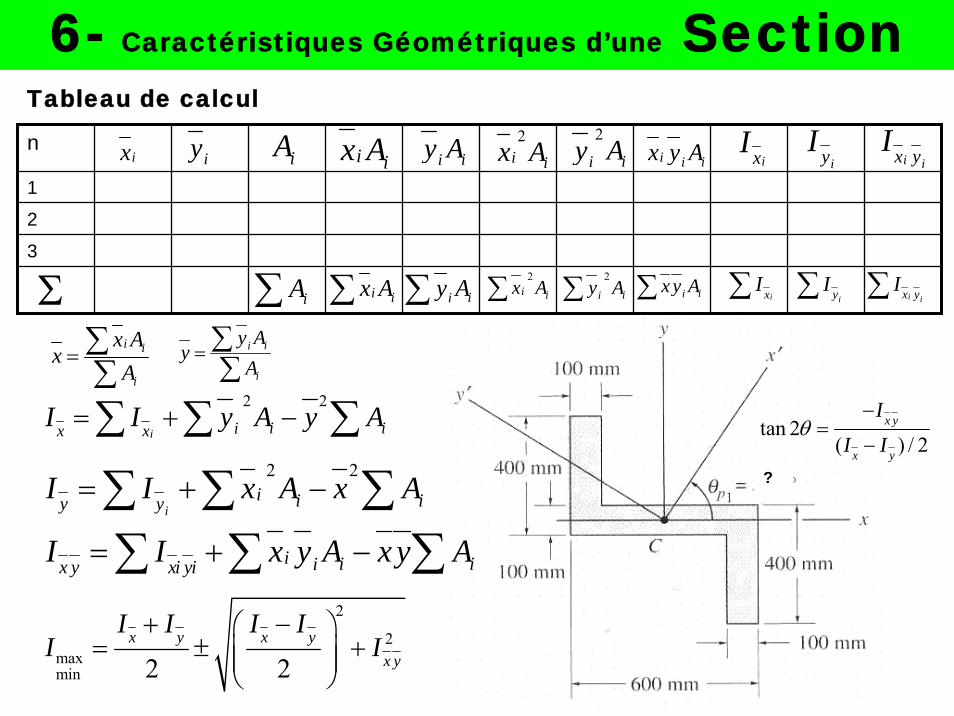
6- Caractéristiques Géométriques d’une Section
?
n
1
2
3
ix iy iA i ix A iiy A i iix y A2
i ix A2
iiy A ixIiyI
i ix yI
i i
i
x Ax
A= ∑∑
ii
i
y Ay
A= ∑∑
i ix A∑iA∑Σ 2i ix A∑iiy A∑ 2
iiy A∑ iix y A∑ ixI∑iyI∑ i ix yI∑
2 2
i i iix xI I y A y A= + −∑ ∑ ∑2 2
ii i iy yI I x A x A= + −∑ ∑ ∑
i i iix y xi yiI I x y A xy A= + −∑ ∑ ∑
tan 2( ) / 2
x y
x y
I
I Iθ
−=
−
2
2maxmin 2 2
x y x yx y
I I I II I
+ −⎛ ⎞= ± +⎜ ⎟⎜ ⎟
⎝ ⎠
Tableau de calcul
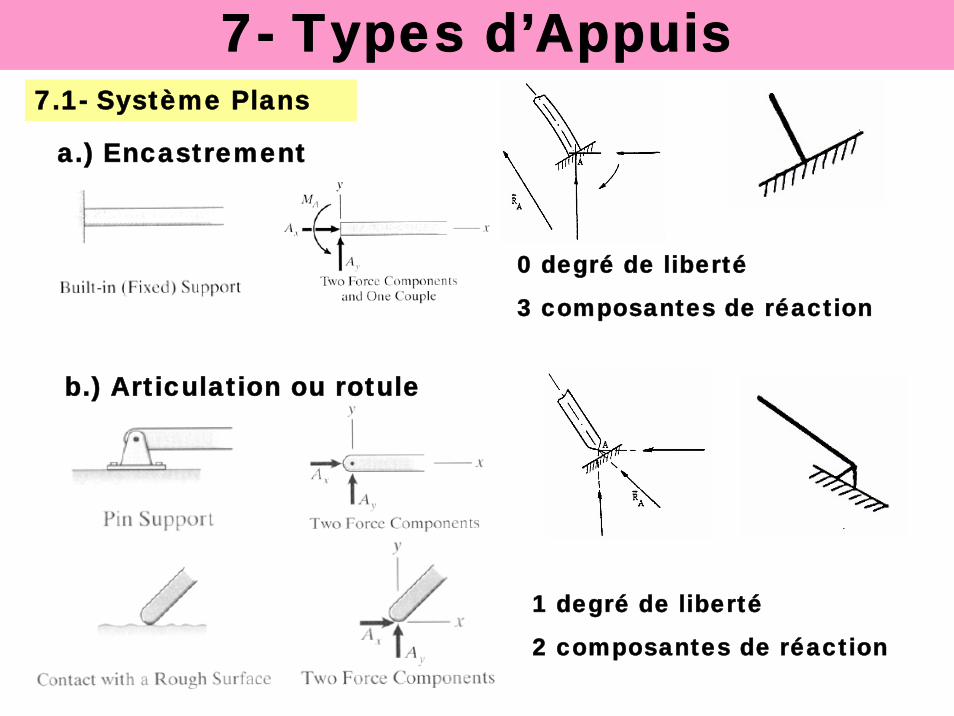
7- Types d’Appuis7.1- Système Plans
a.) Encastrement
b.) Articulation ou rotule
0 degré de liberté
3 composantes de réaction
1 degré de liberté
2 composantes de réaction
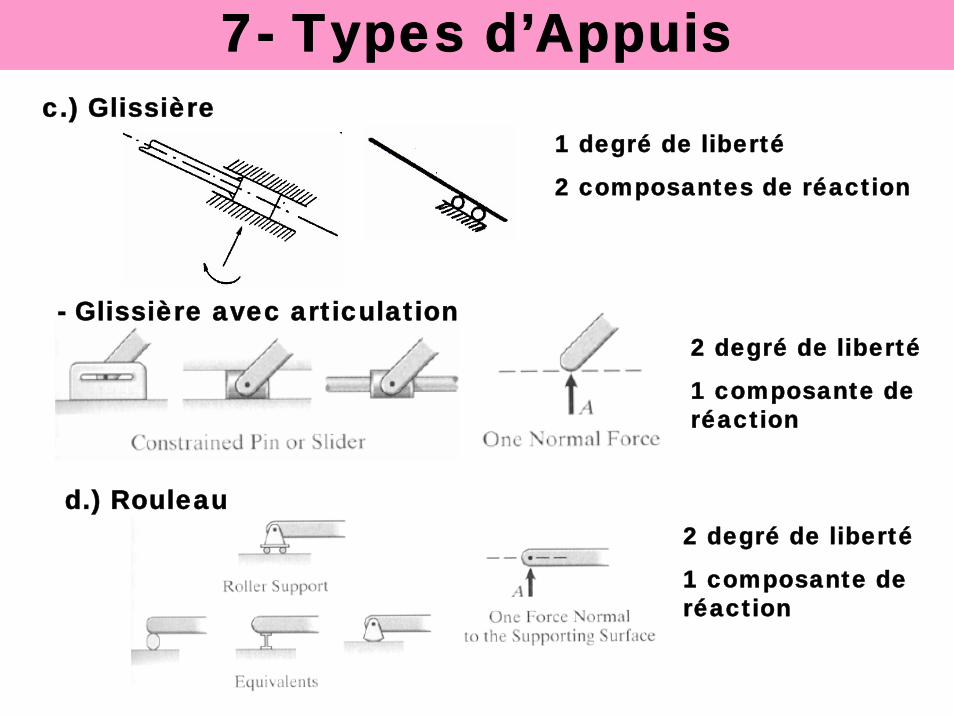
7- Types d’Appuisc.) Glissière
- Glissière avec articulation
d.) Rouleau
1 degré de liberté
2 composantes de réaction
2 degré de liberté
1 composante de réaction
2 degré de liberté
1 composante de réaction
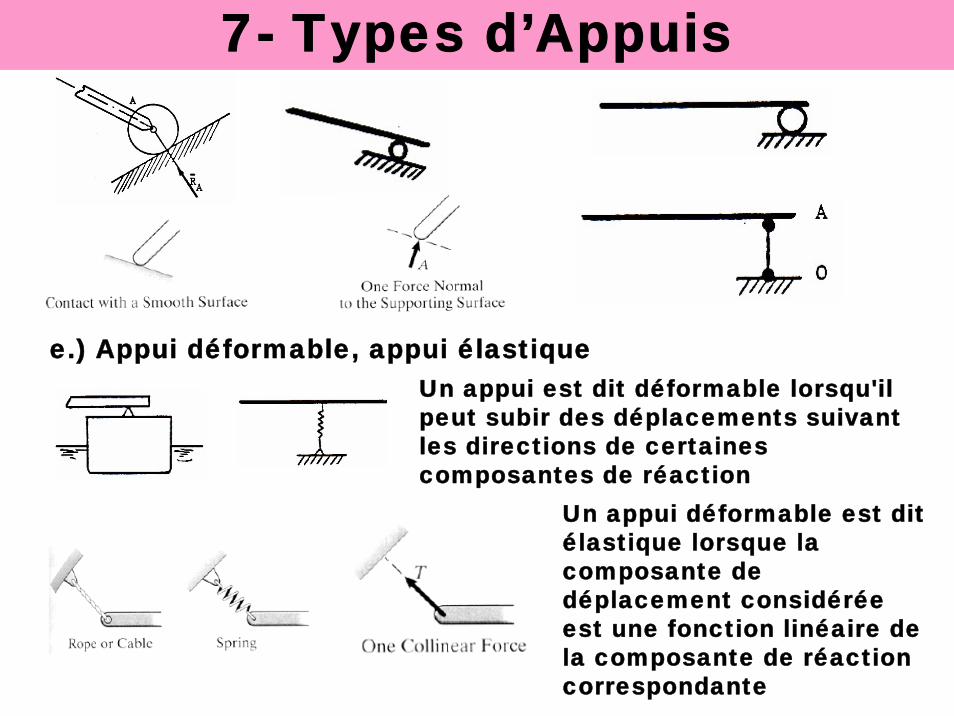
7- Types d’Appuis
e.) Appui déformable, appui élastiqueUn appui est dit déformable lorsqu'il peut subir des déplacements suivant les directions de certaines composantes de réaction
Un appui déformable est dit élastique lorsque la composante de déplacement considérée est une fonction linéaire de la composante de réaction correspondante
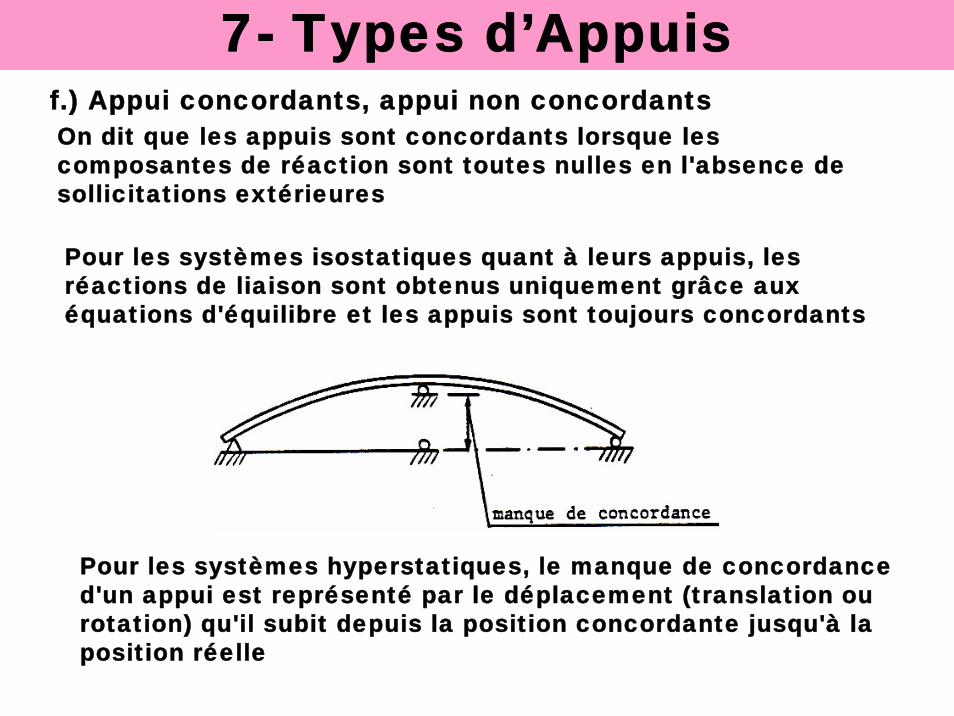
7- Types d’Appuisf.) Appui concordants, appui non concordantsOn dit que les appuis sont concordants lorsque les composantes de réaction sont toutes nulles en l'absence de sollicitations extérieures
Pour les systèmes hyperstatiques, le manque de concordance d'un appui est représenté par le déplacement (translation ou rotation) qu'il subit depuis la position concordante jusqu'à la position réelle
Pour les systèmes isostatiques quant à leurs appuis, les réactions de liaison sont obtenus uniquement grâce aux équations d'équilibre et les appuis sont toujours concordants
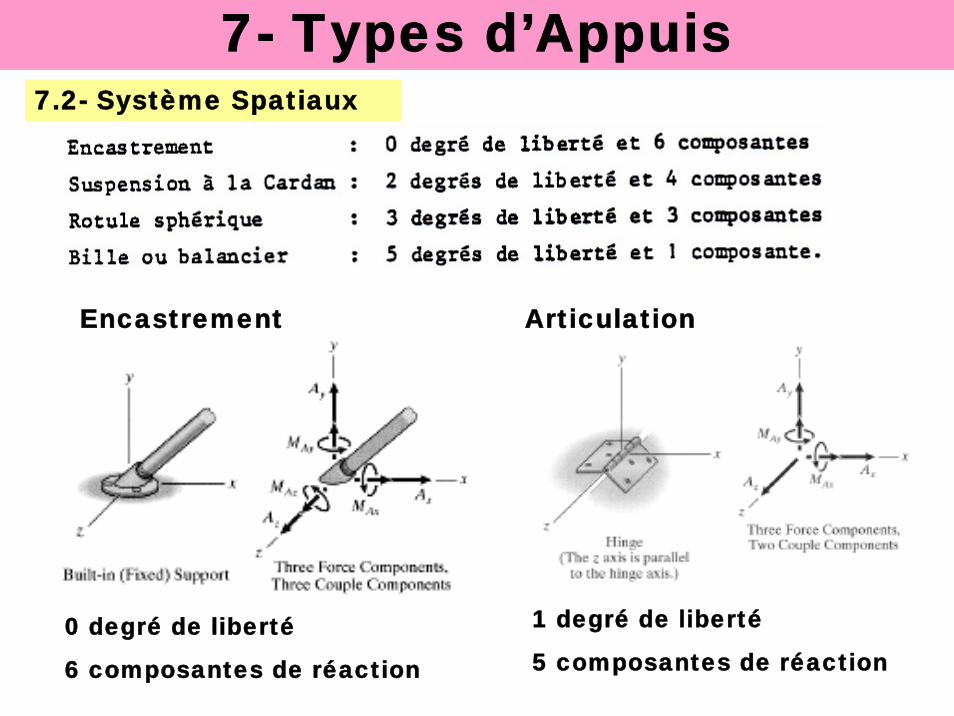
7- Types d’Appuis7.2- Système Spatiaux
Encastrement Articulation
0 degré de liberté
6 composantes de réaction
1 degré de liberté
5 composantes de réaction
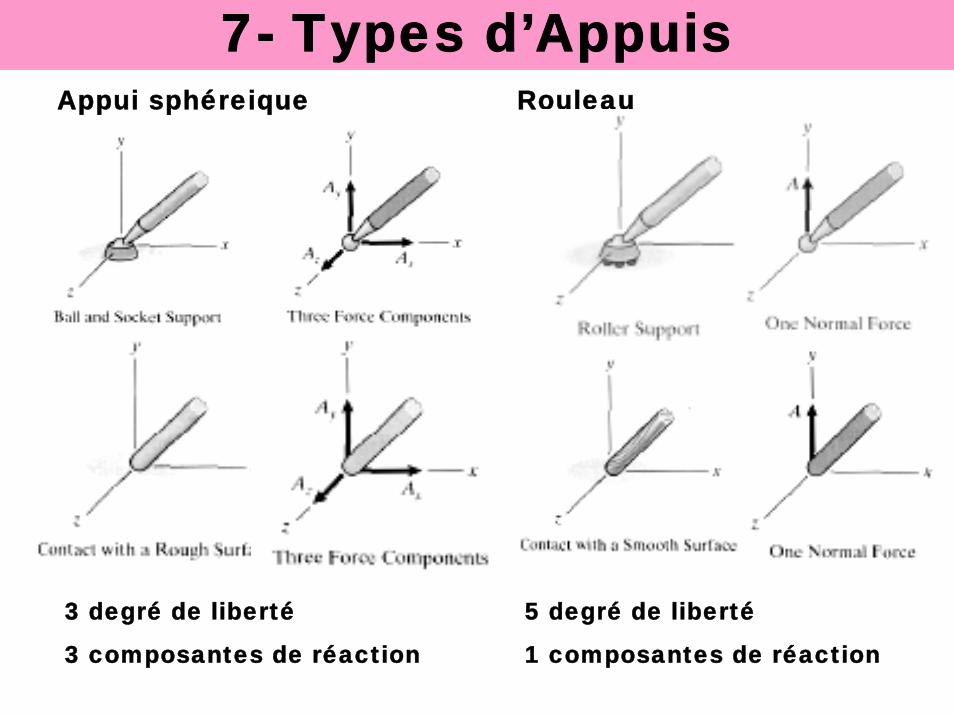
7- Types d’AppuisAppui sphéreique Rouleau
3 degré de liberté
3 composantes de réaction
5 degré de liberté
1 composantes de réaction
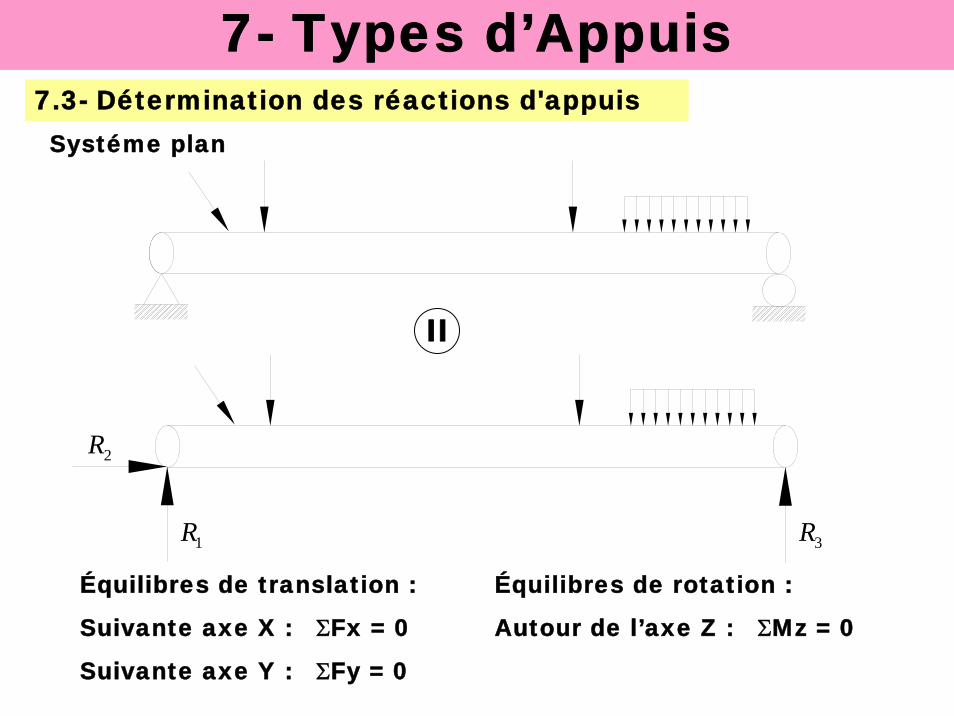
7- Types d’Appuis7.3- Détermination des réactions d'appuisSystéme plan
Équilibres de translation :
Suivante axe X : ΣFx = 0
Suivante axe Y : ΣFy = 0
Équilibres de rotation :
Autour de l’axe Z : ΣMz = 0
=1R
2R
3R
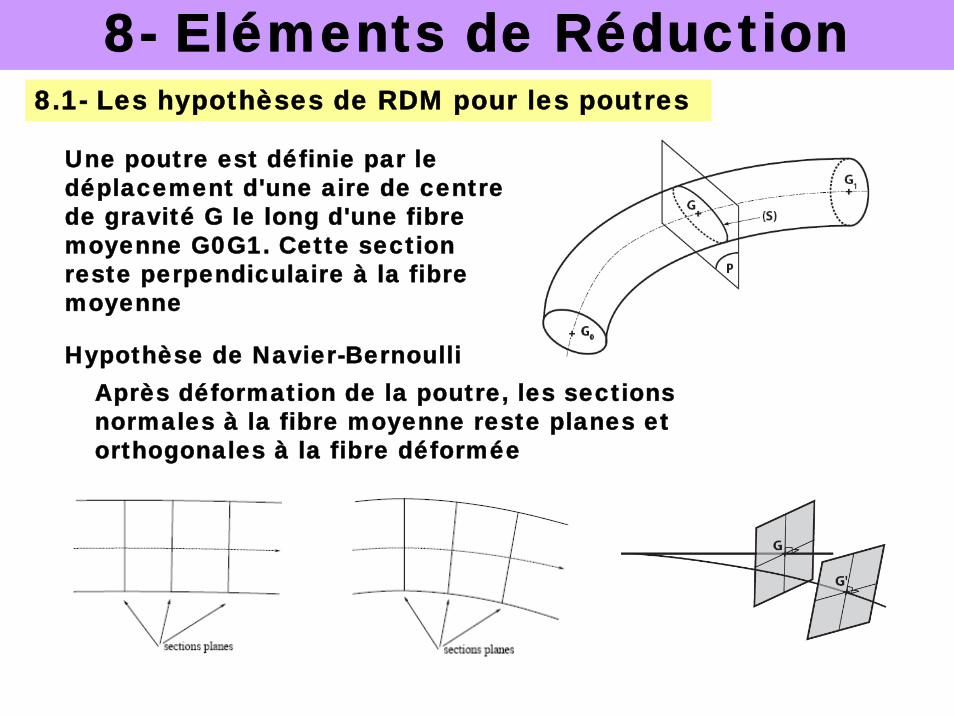
8- Eléments de Réduction8.1- Les hypothèses de RDM pour les poutres
Une poutre est définie par le déplacement d'une aire de centre de gravité G le long d'une fibre moyenne G0G1. Cette section reste perpendiculaire à la fibre moyenne
Après déformation de la poutre, les sections normales à la fibre moyenne reste planes et orthogonales à la fibre déformée
Hypothèse de Navier-Bernoulli
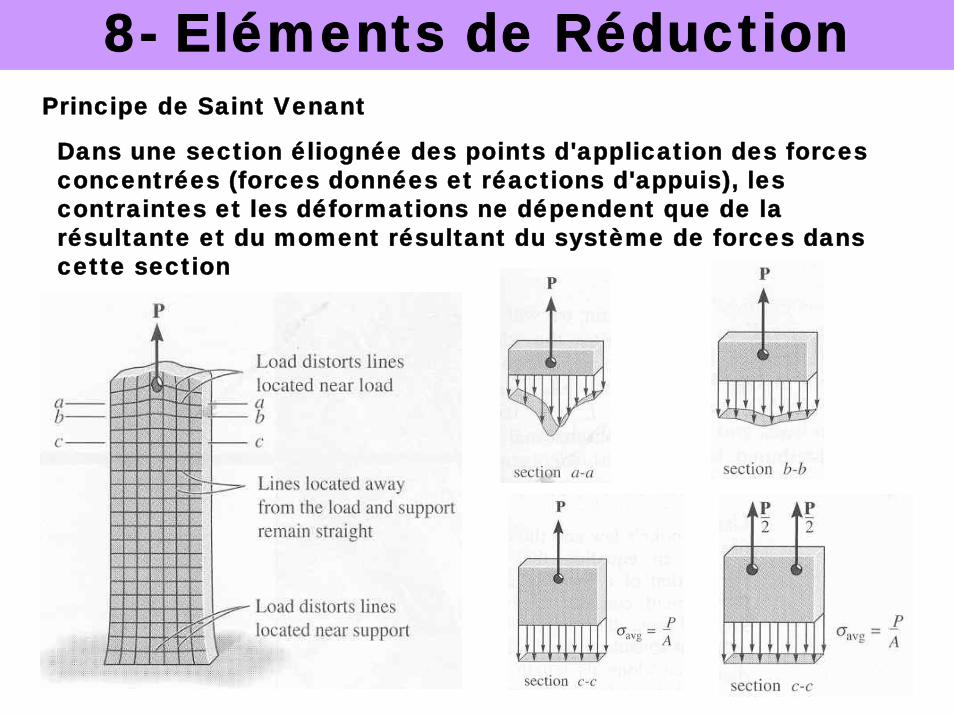
8- Eléments de Réduction
Dans une section éliognée des points d'application des forces concentrées (forces données et réactions d'appuis), les contraintes et les déformations ne dépendent que de la résultante et du moment résultant du système de forces dans cette section
Principe de Saint Venant
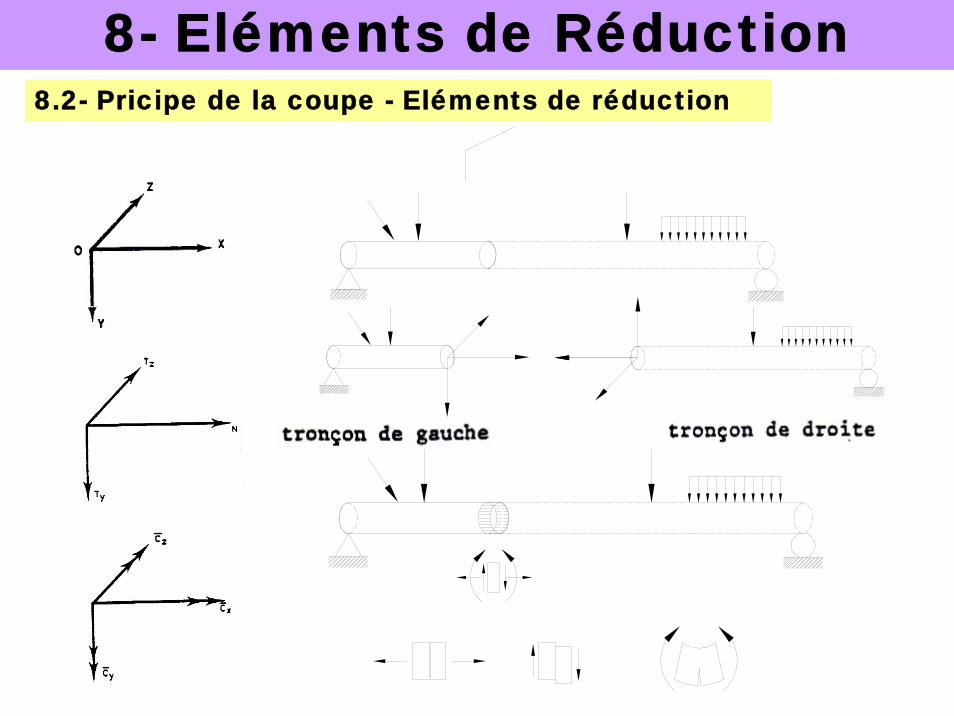
8- Eléments de Réduction8.2- Pricipe de la coupe - Eléments de réduction
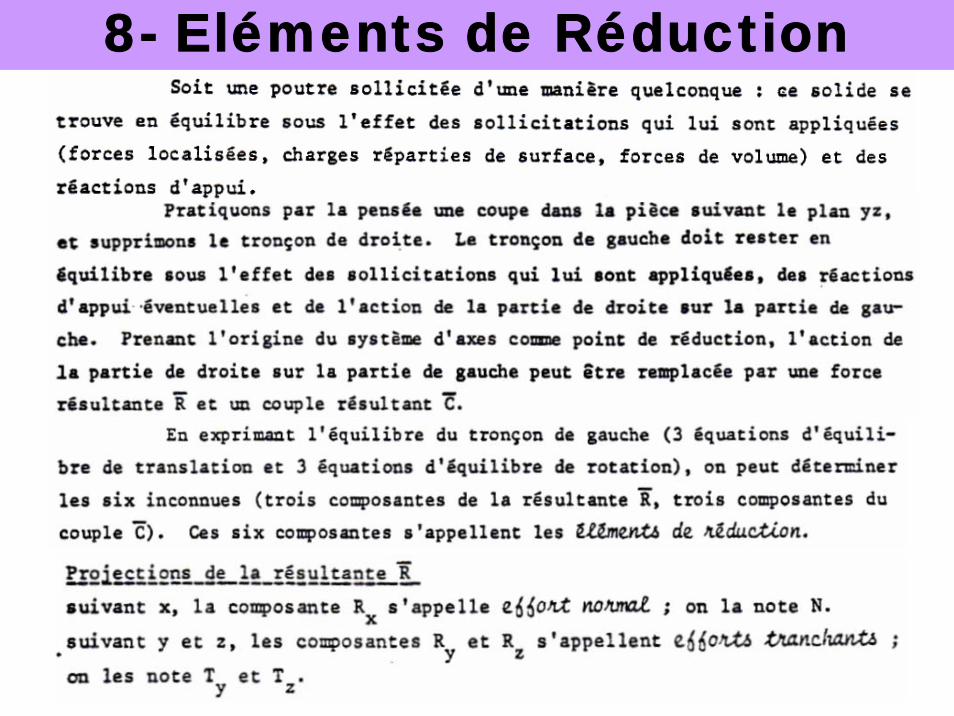
8- Eléments de Réduction
8- Eléments de Réduction
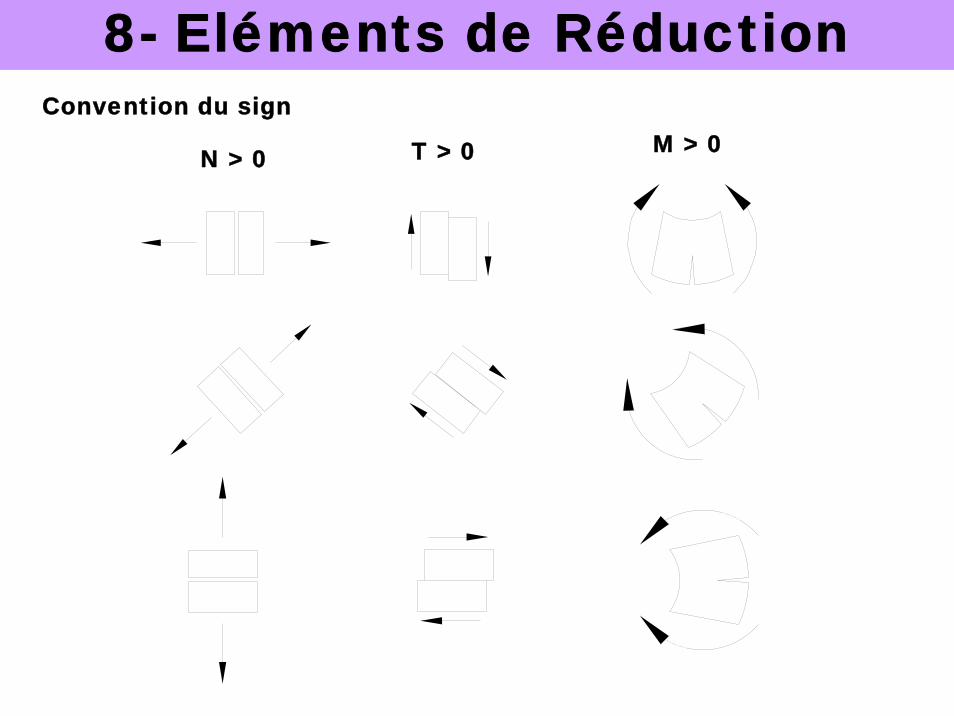
8- Eléments de RéductionConvention du sign
N > 0 T > 0 M > 0
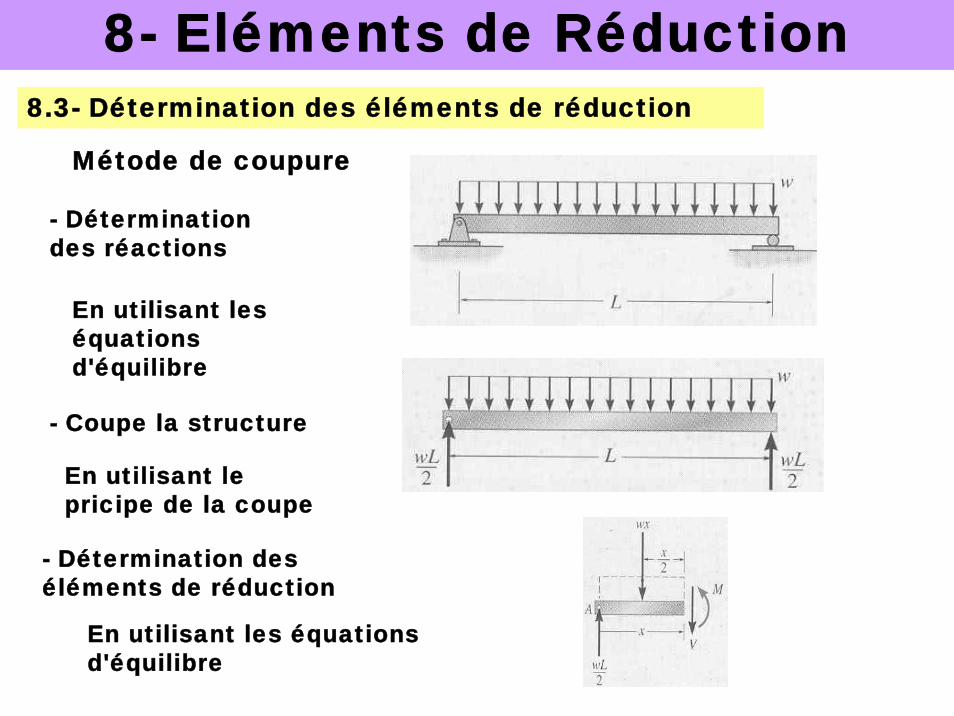
8- Eléments de Réduction8.3- Détermination des éléments de réduction
Métode de coupure
- Détermination des réactions
En utilisant les équations d'équilibre
- Coupe la structure
En utilisant le pricipe de la coupe
- Détermination des éléments de réduction
En utilisant les équations d'équilibre
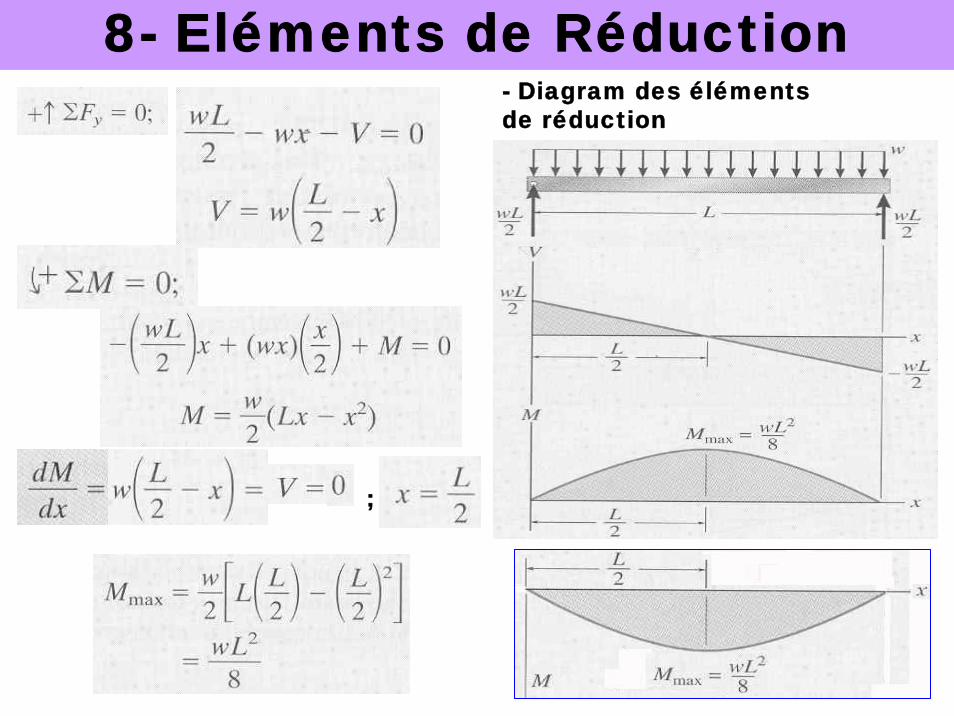
8- Eléments de Réduction
;
- Diagram des éléments de réduction
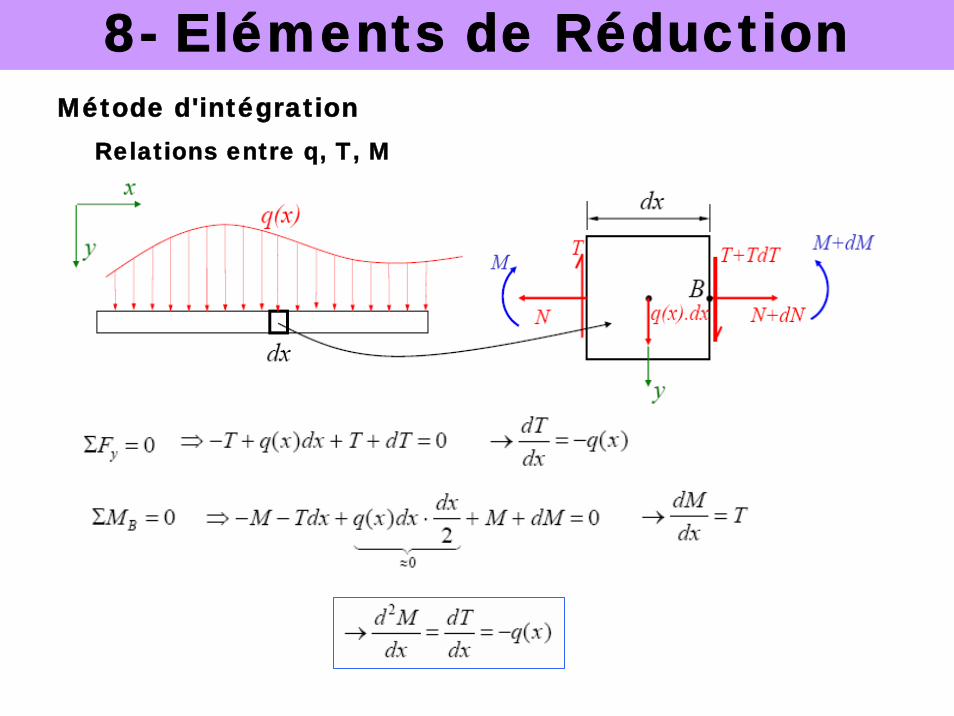
8- Eléments de RéductionMétode d'intégration
Relations entre q, T, M
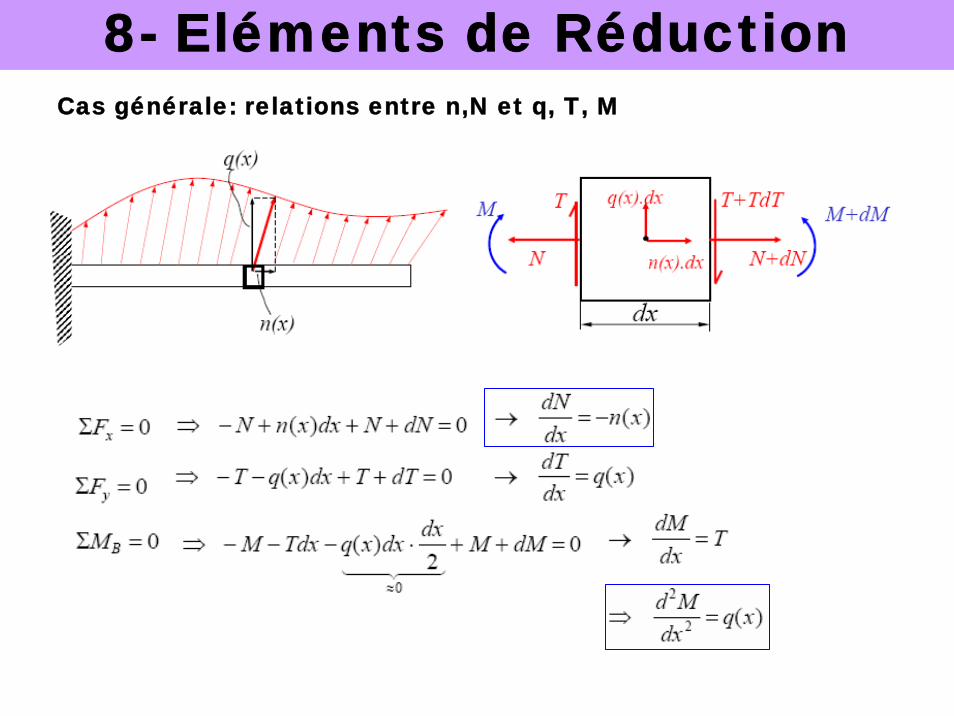
8- Eléments de RéductionCas générale: relations entre n,N et q, T, M
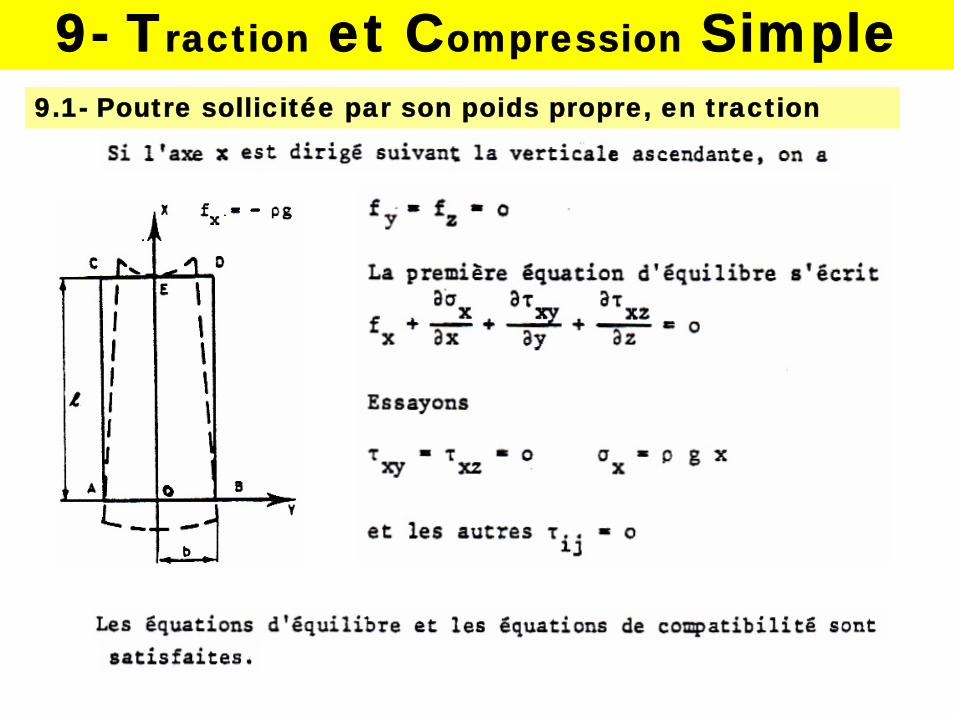
9- Traction et Compression Simple9.1- Poutre sollicitée par son poids propre, en traction
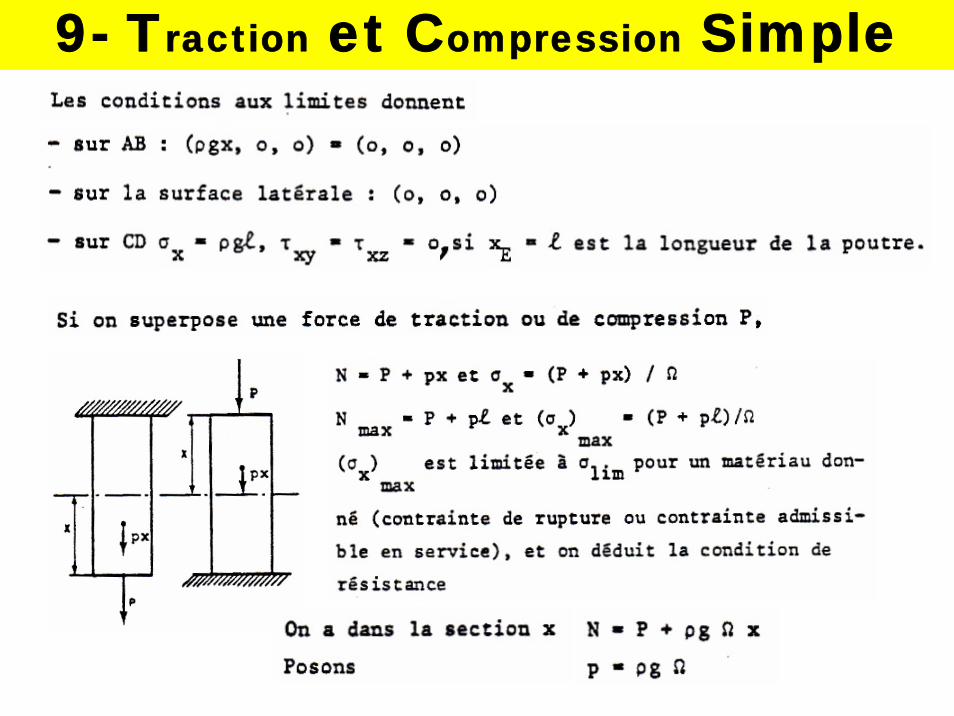
9- Traction et Compression Simple
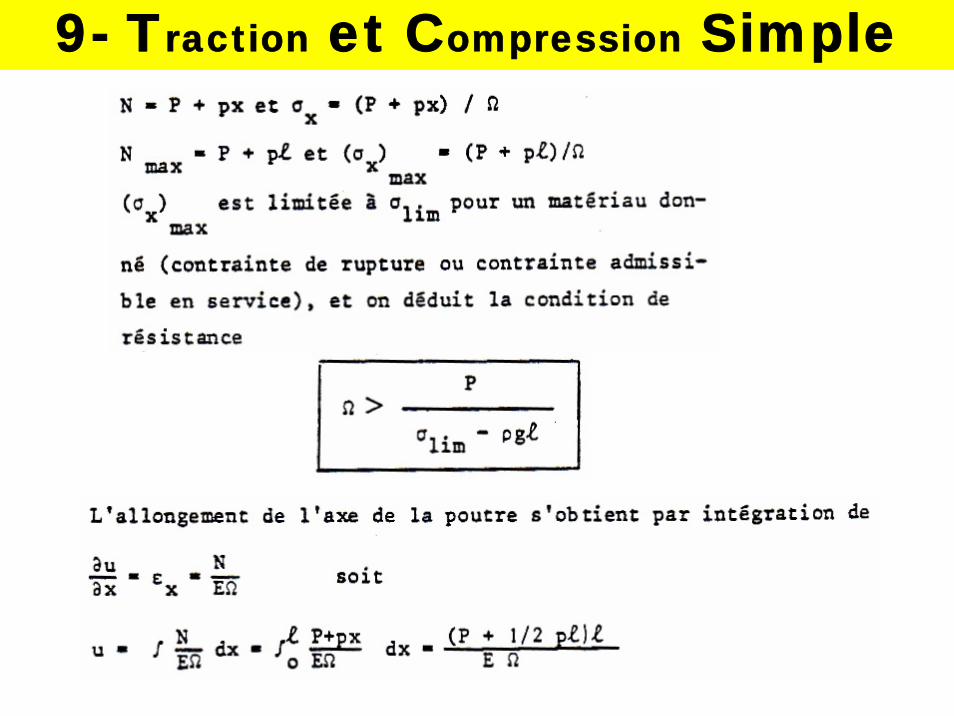
9- Traction et Compression Simple
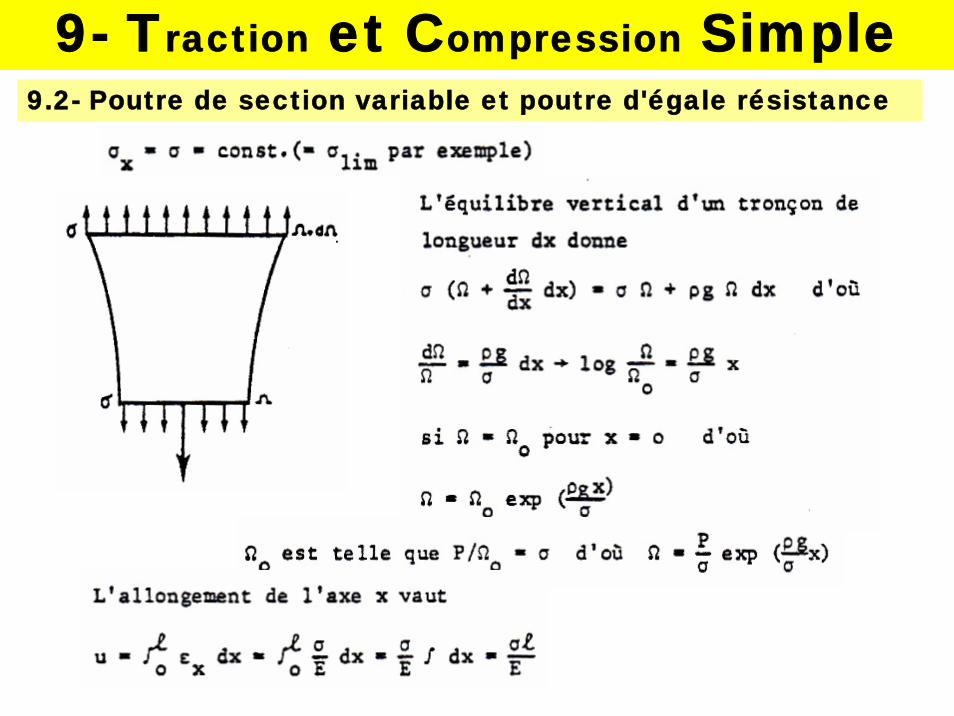
9- Traction et Compression Simple9.2- Poutre de section variable et poutre d'égale résistance
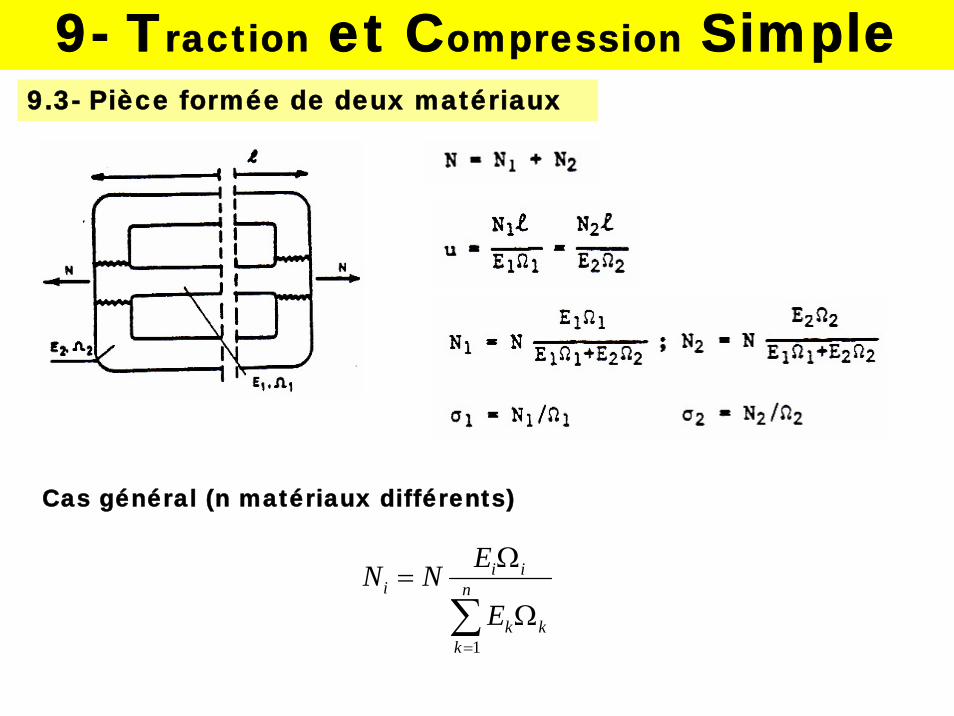
9- Traction et Compression Simple9.3- Pièce formée de deux matériaux
1
i ii n
k kk
EN NE
=
Ω=
Ω∑
Cas général (n matériaux différents)
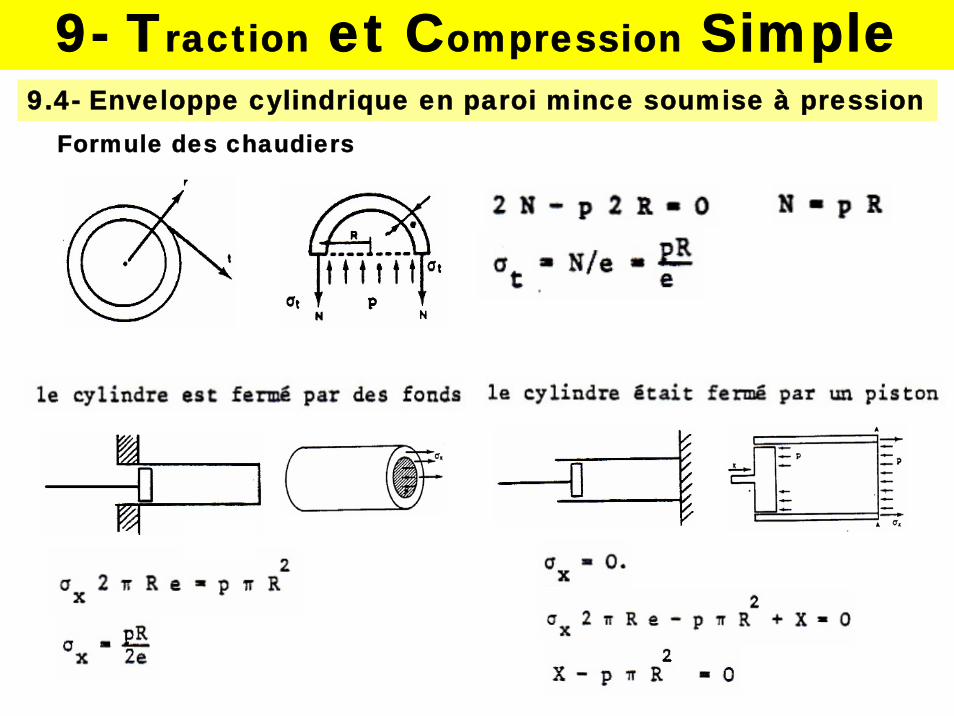
9- Traction et Compression Simple9.4- Enveloppe cylindrique en paroi mince soumise à pression
Formule des chaudiers
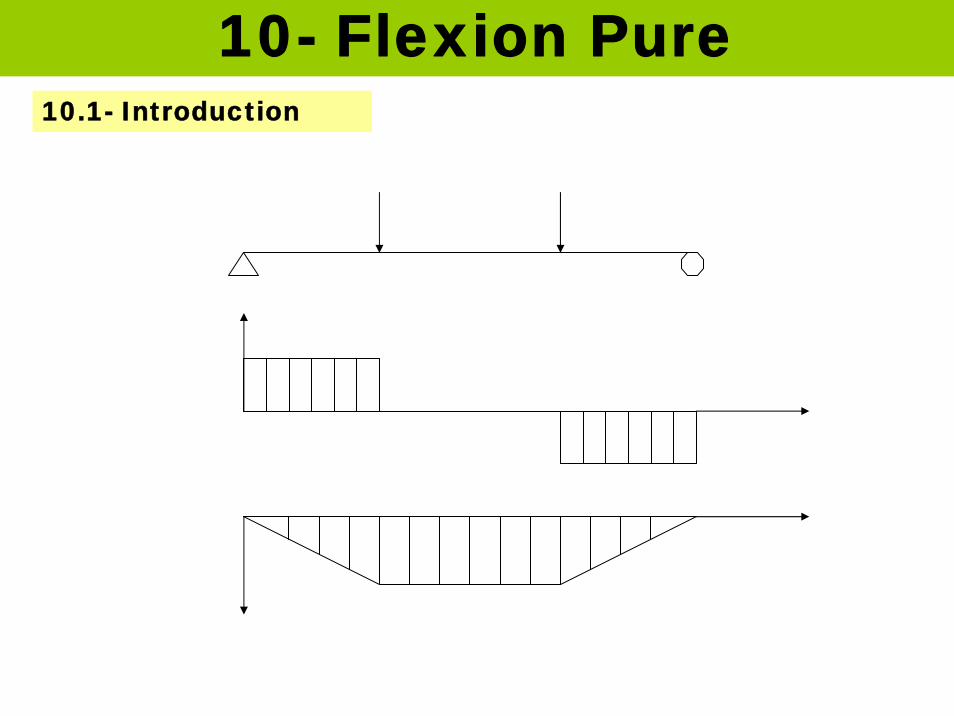
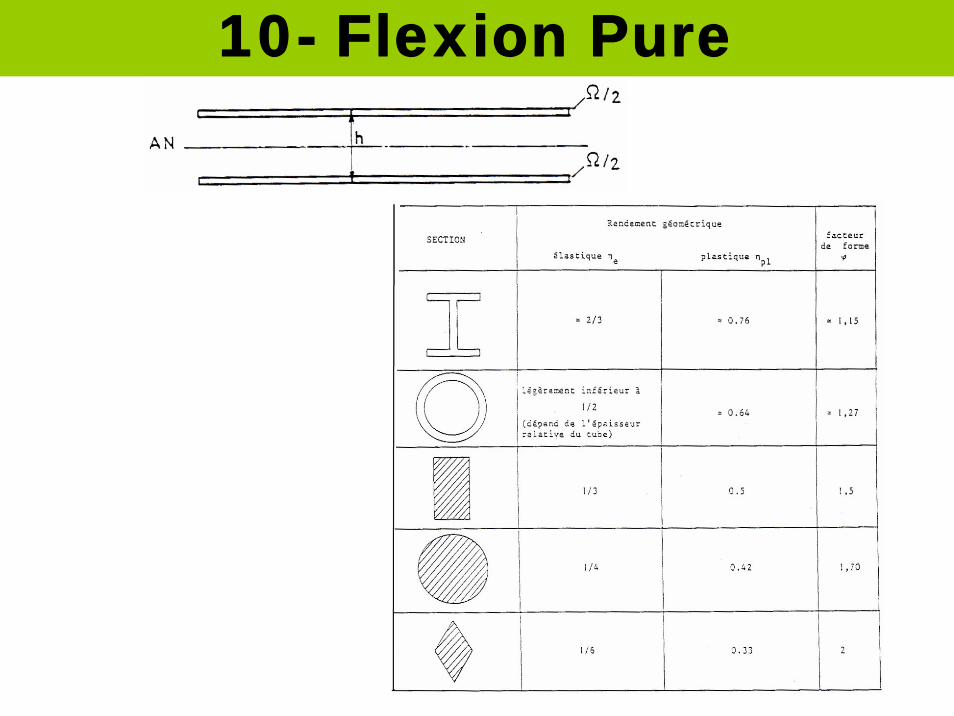
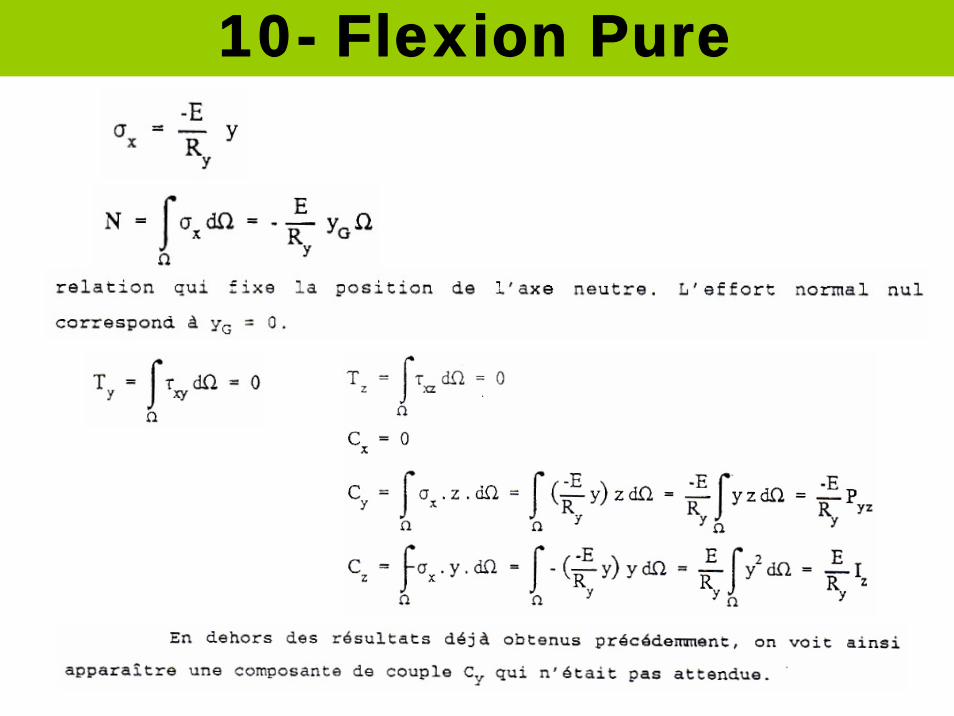
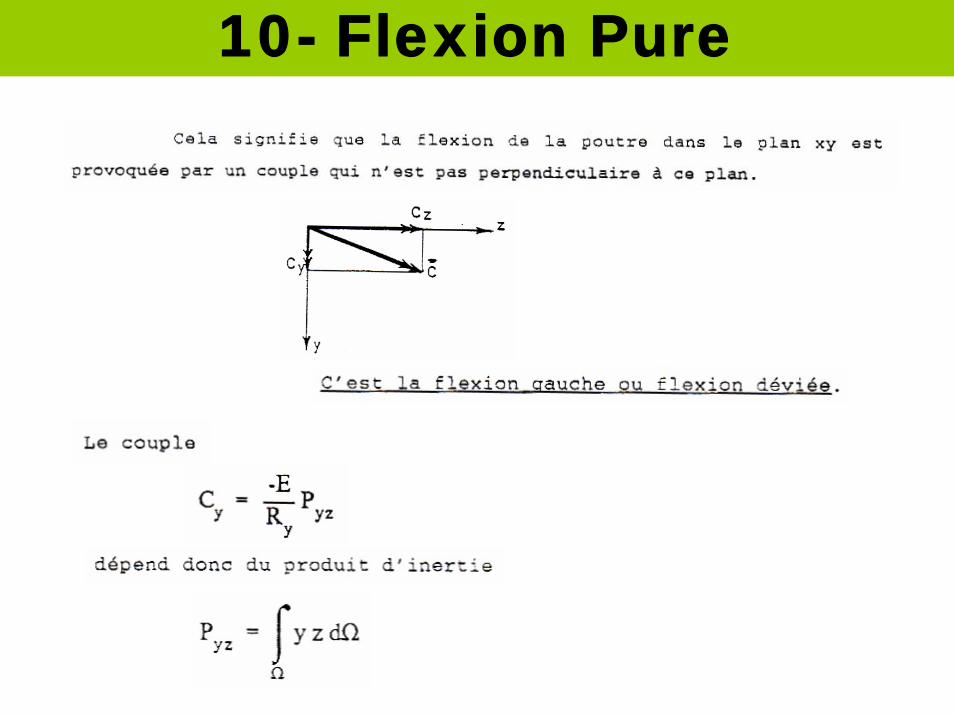
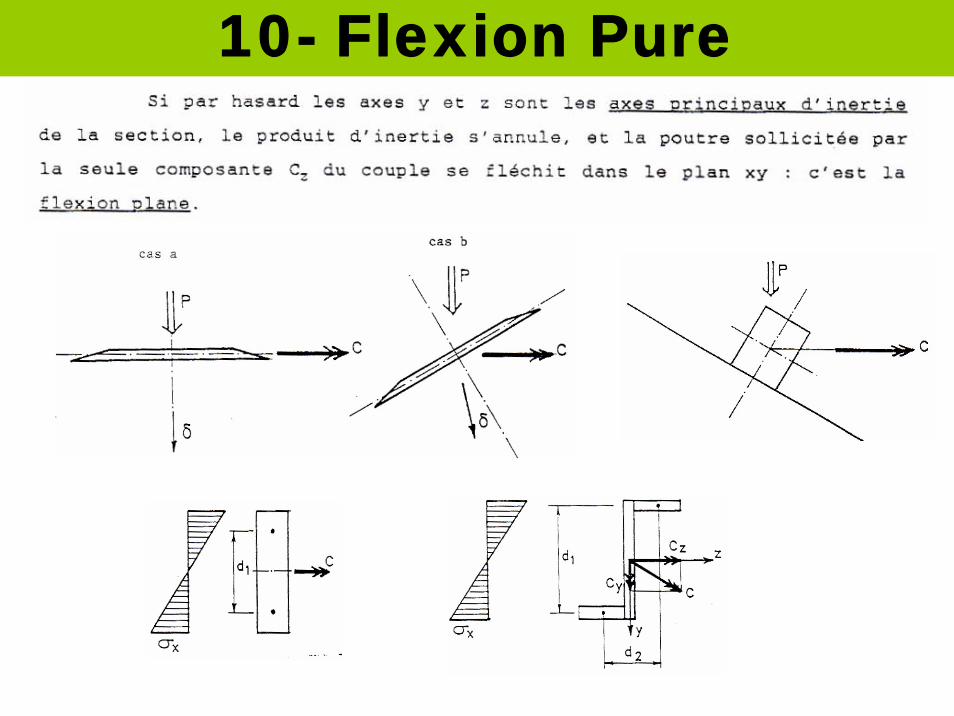
10- Flexion Pure10.1- Introduction
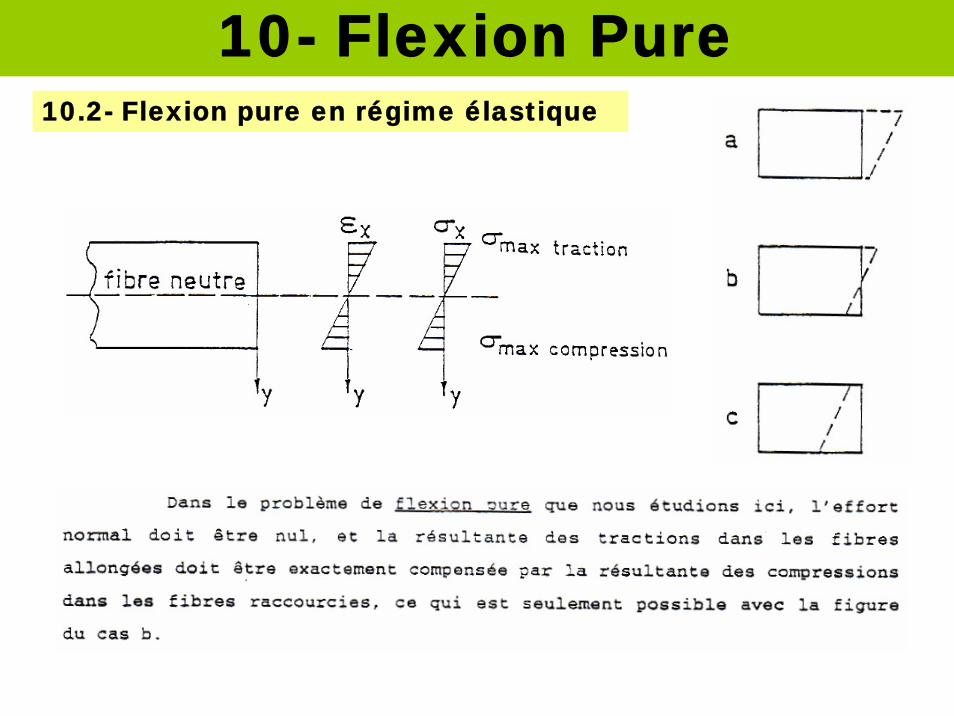
10- Flexion Pure10.2- Flexion pure en régime élastique
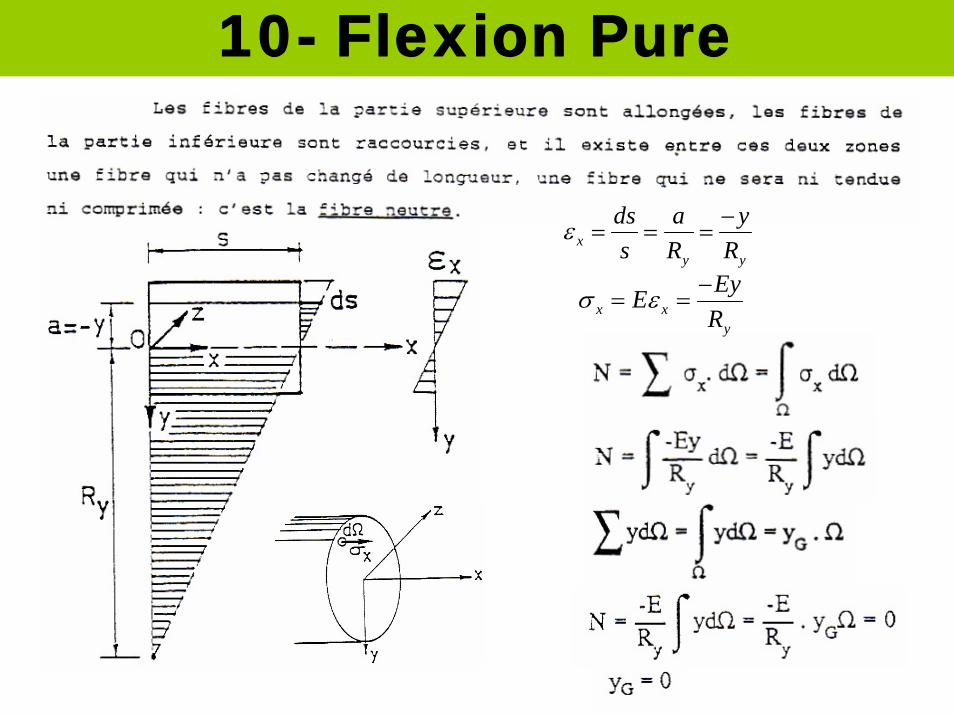
10- Flexion Pure
xy y
ds a ys R R
ε −= = =
x xy
EyER
σ ε −= =
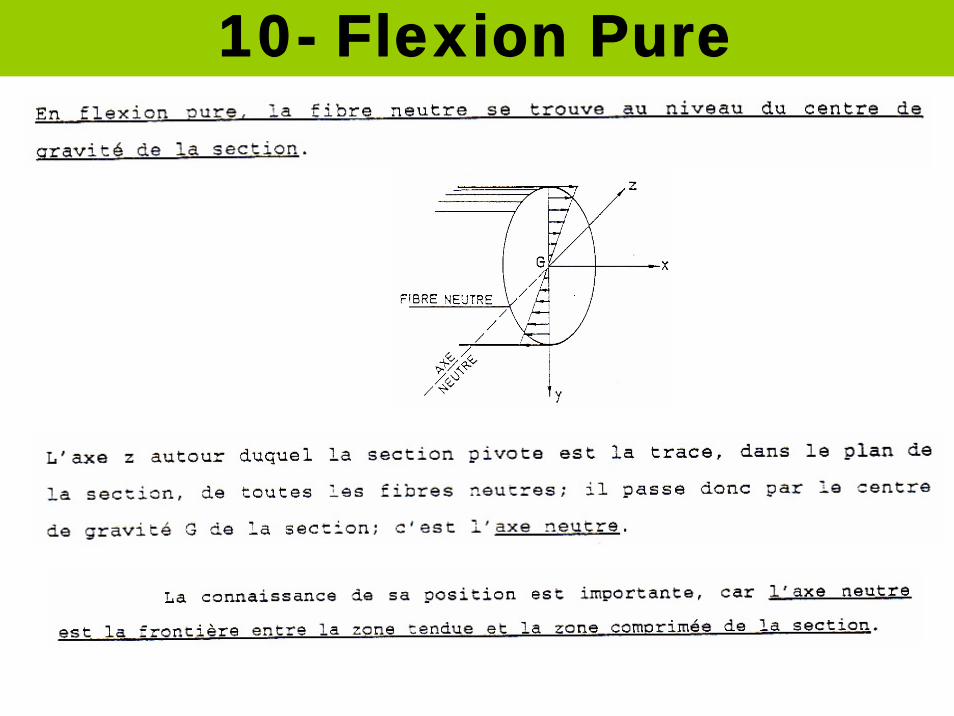
10- Flexion Pure
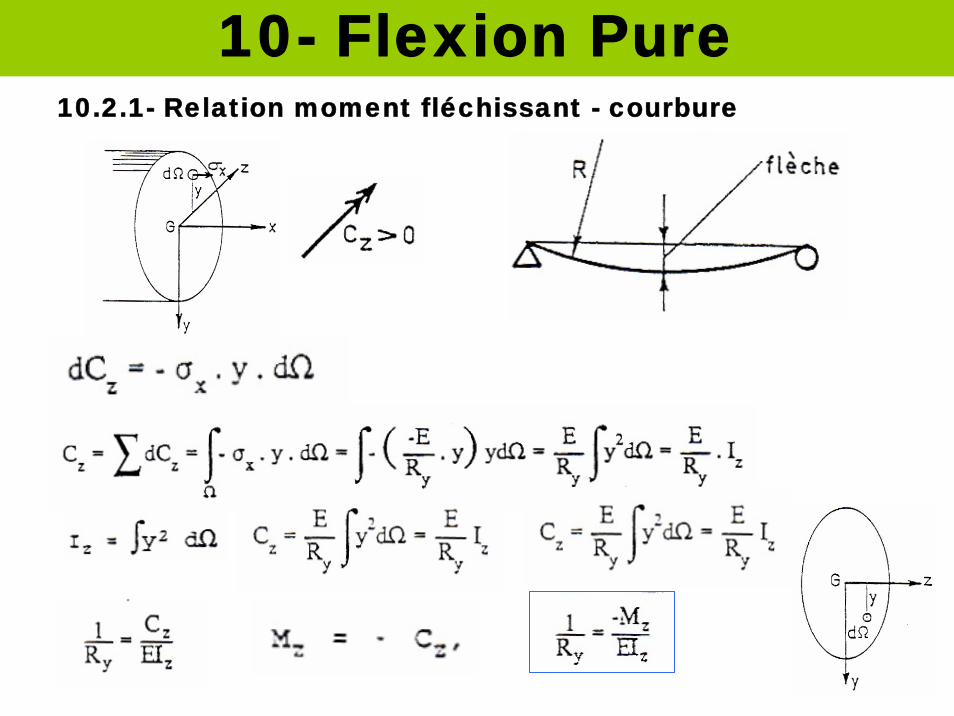
10- Flexion Pure10.2.1- Relation moment fléchissant - courbure
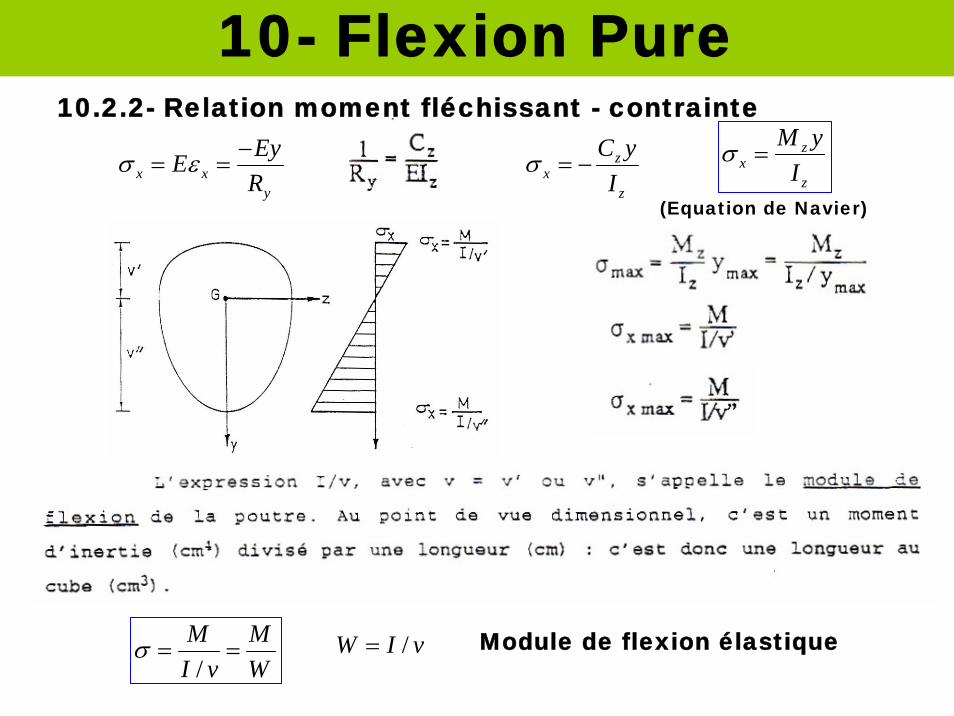
10- Flexion Pure10.2.2- Relation moment fléchissant - contrainte
x xy
EyER
σ ε −= = z
xz
C yI
σ = −z
xz
M yI
σ =
(Equation de Navier)
/M MI v W
σ = = /W I v= Module de flexion élastique
10- Flexion Pure
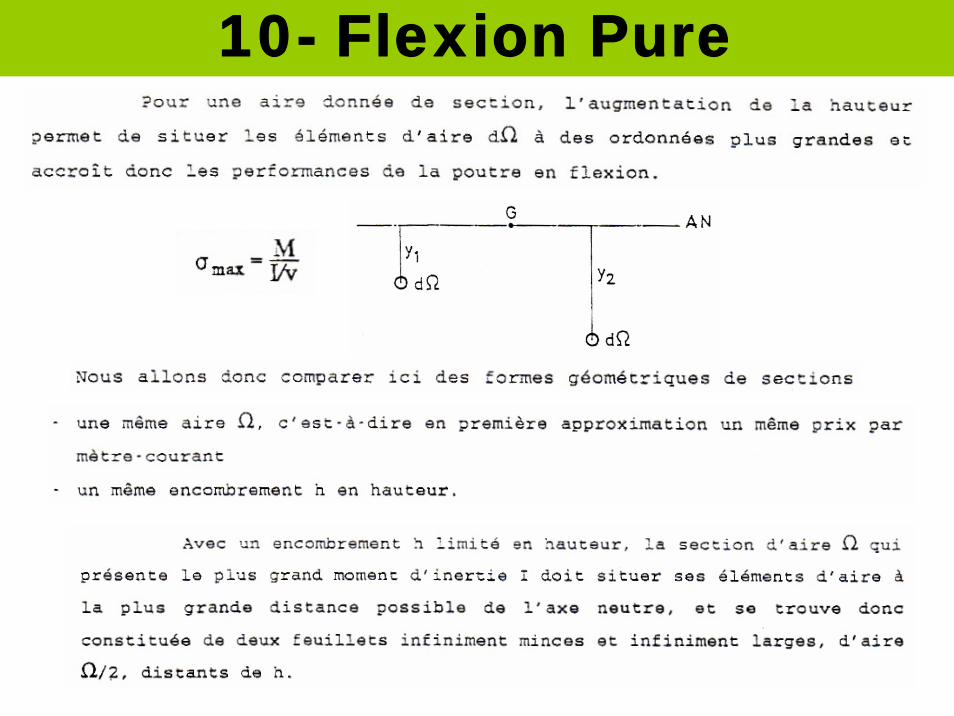
10- Flexion Pure
10- Flexion Pure
10- Flexion Pure
10- Flexion Pure
10- Flexion Pure
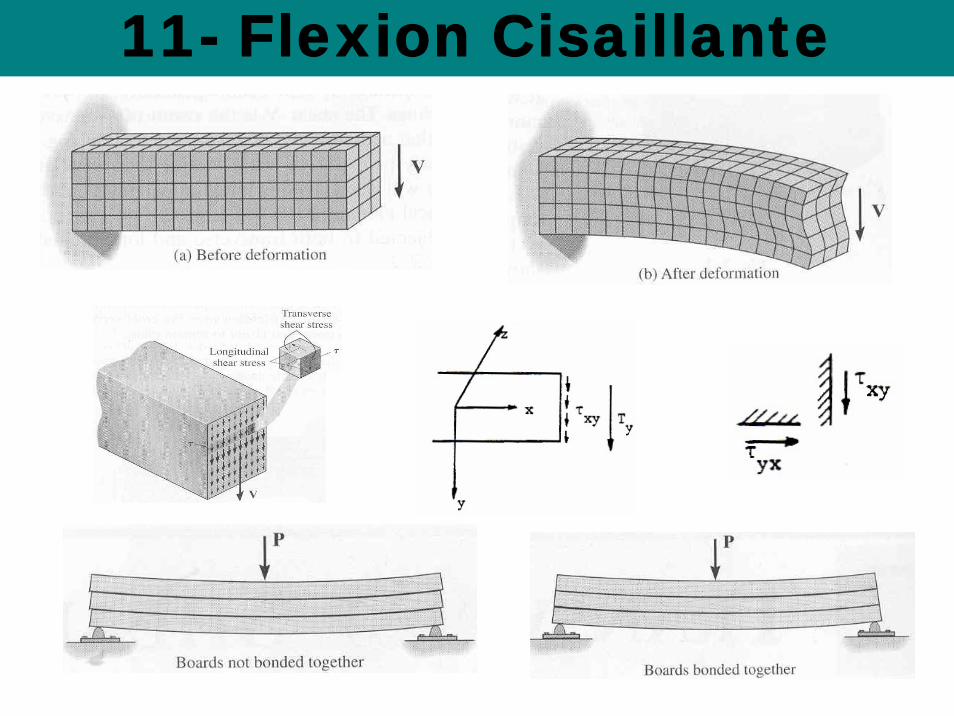
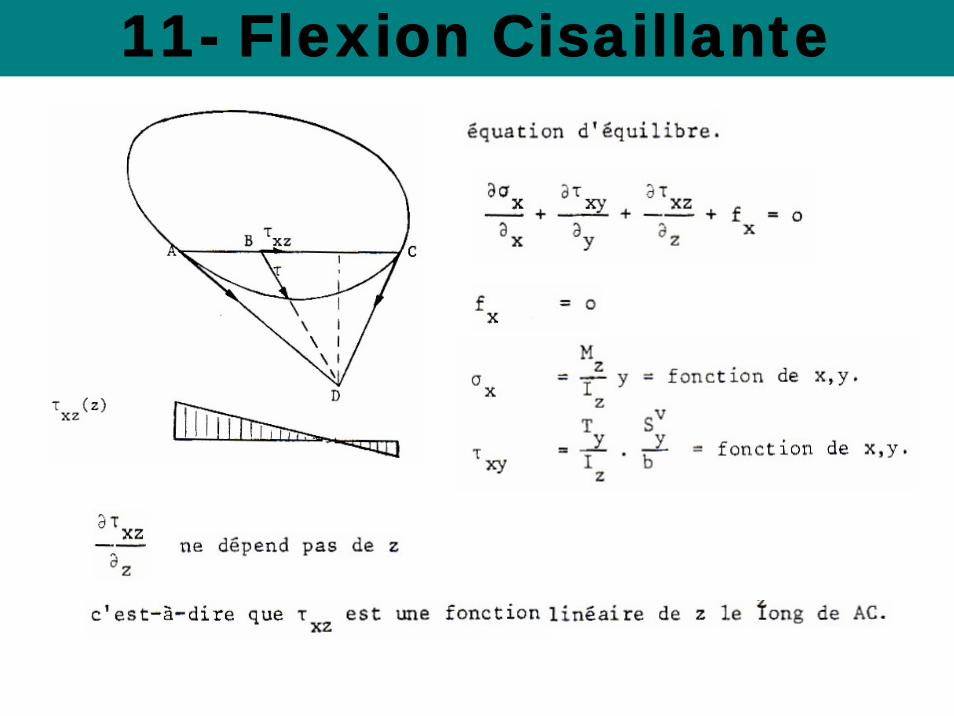
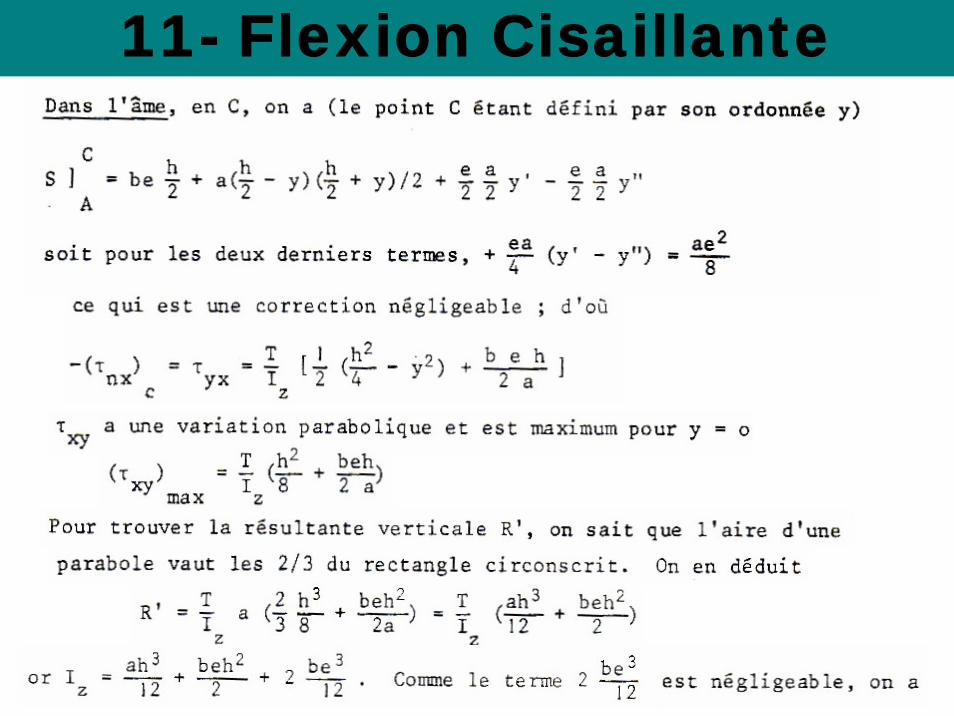
11- Flexion Cisaillante
11- Flexion Cisaillante
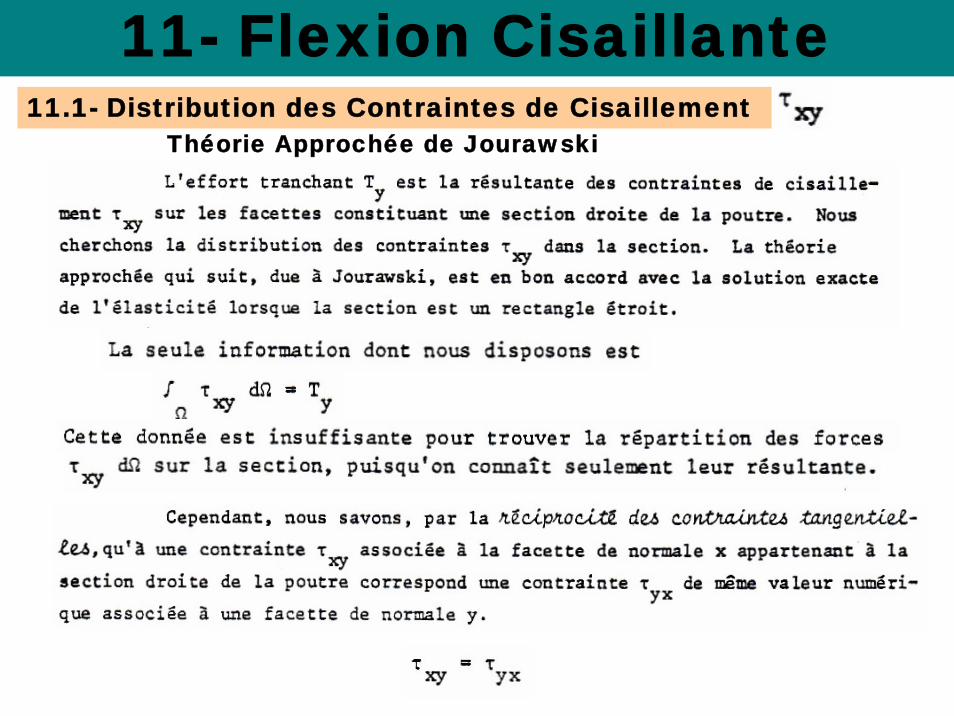
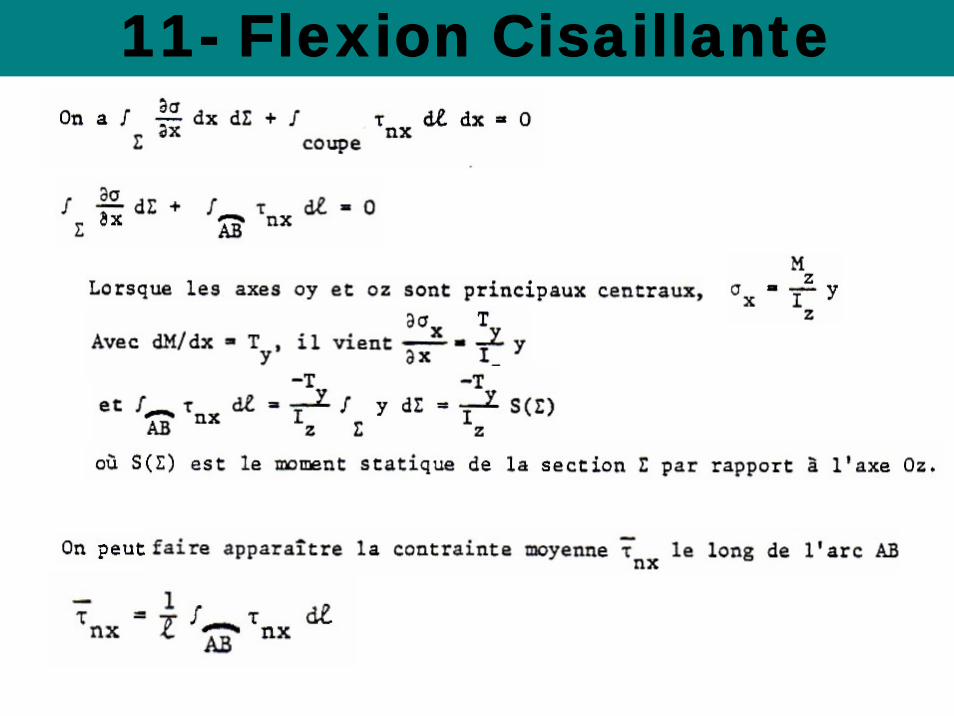
11- Flexion Cisaillante11.1- Distribution des Contraintes de Cisaillement
Théorie Approchée de Jourawski
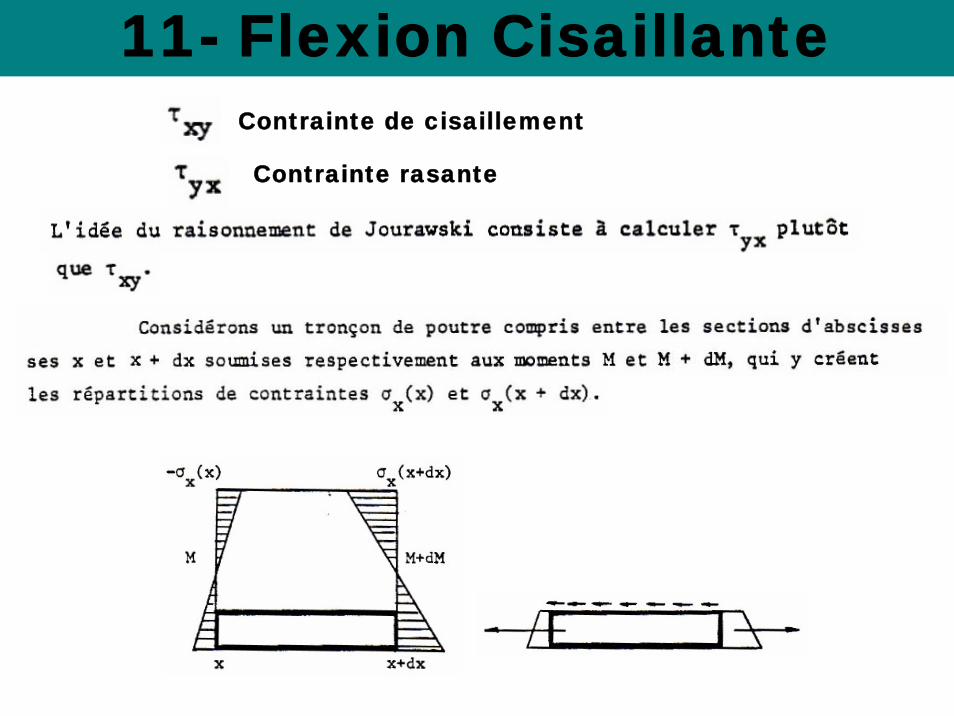
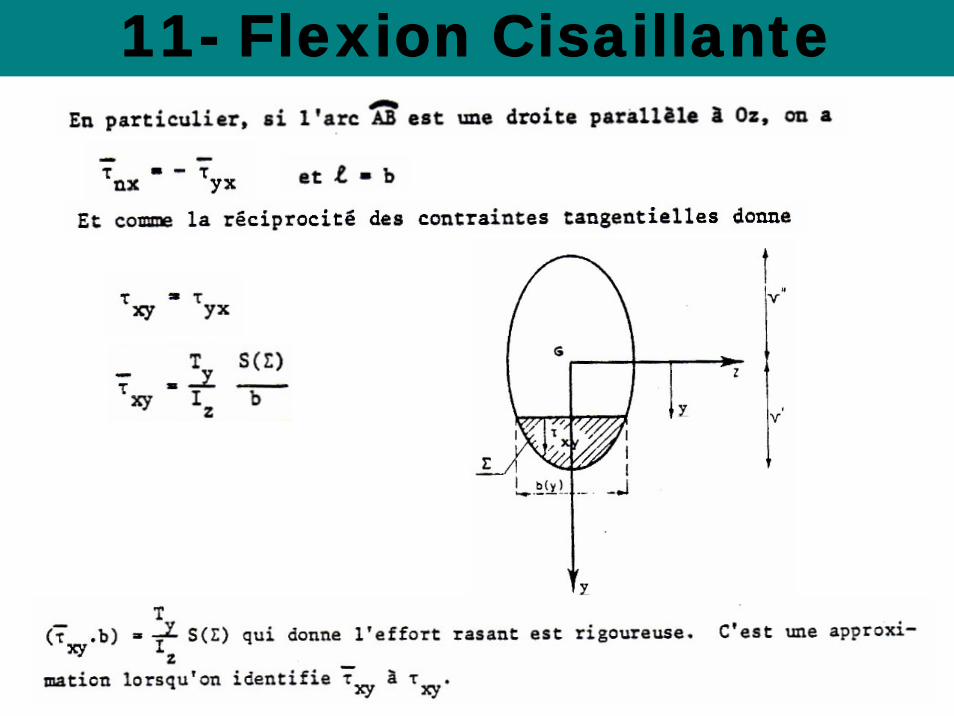
11- Flexion CisaillanteContrainte de cisaillement
Contrainte rasante
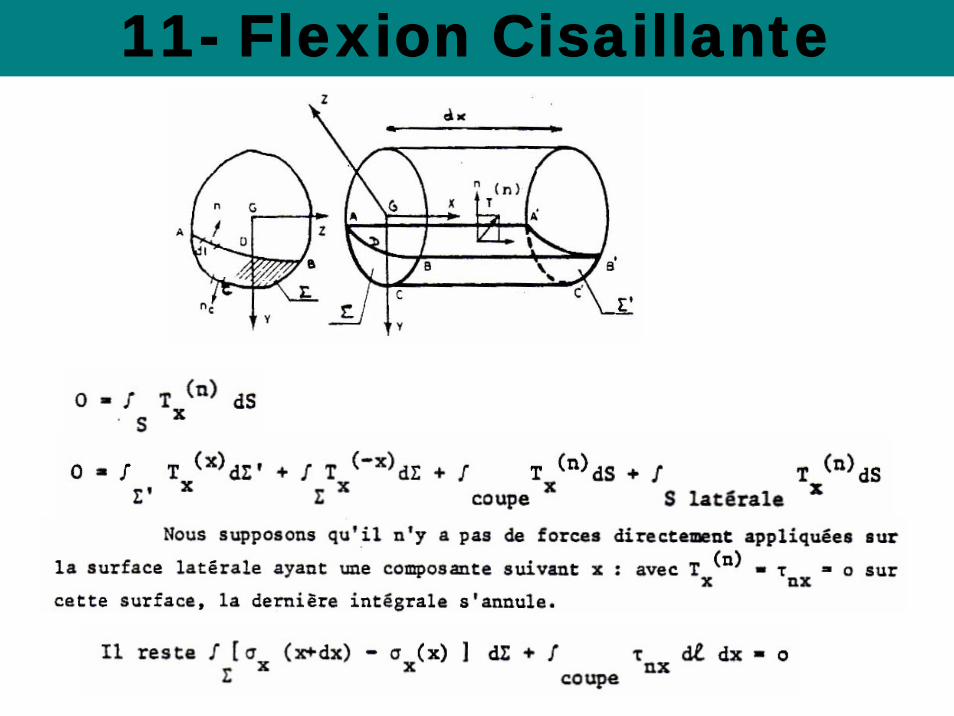
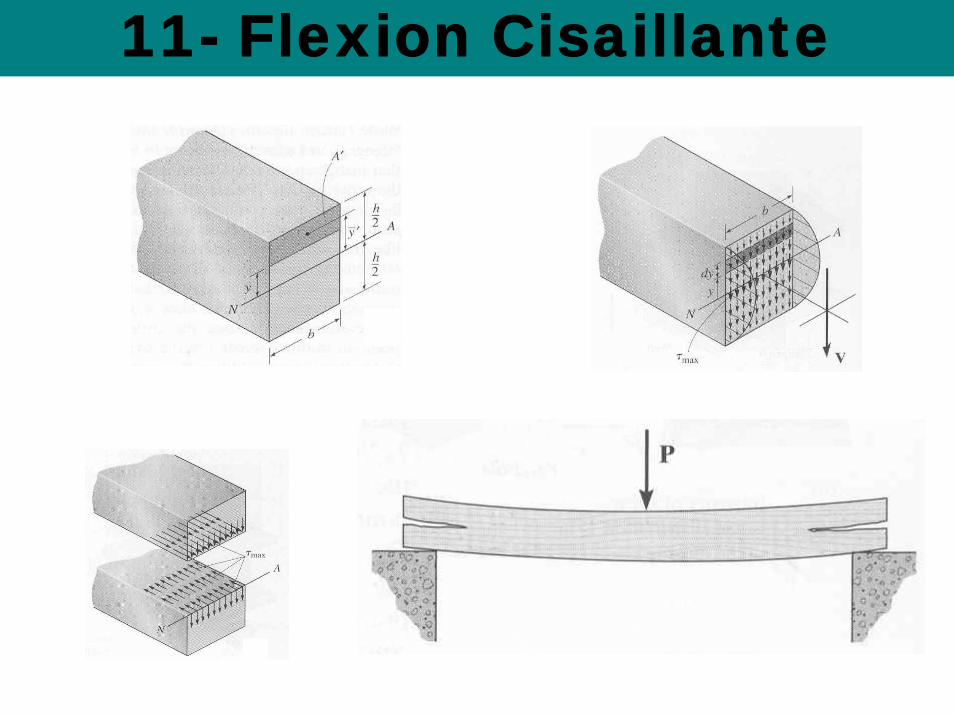
11- Flexion Cisaillante
11- Flexion Cisaillante
11- Flexion Cisaillante
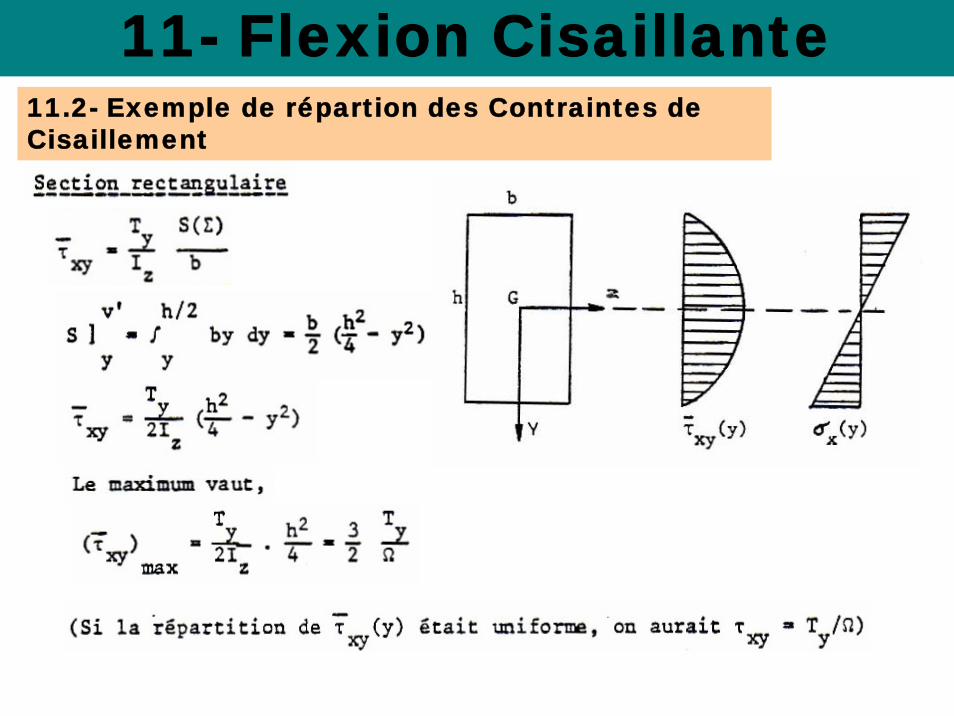
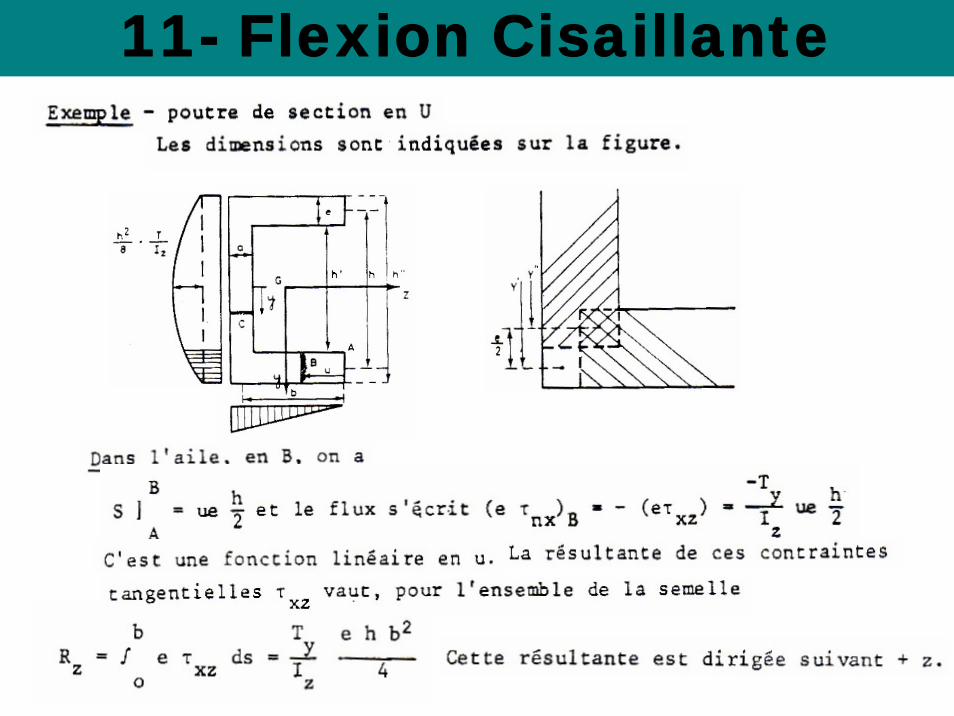
11- Flexion Cisaillante11.2- Exemple de répartion des Contraintes de Cisaillement
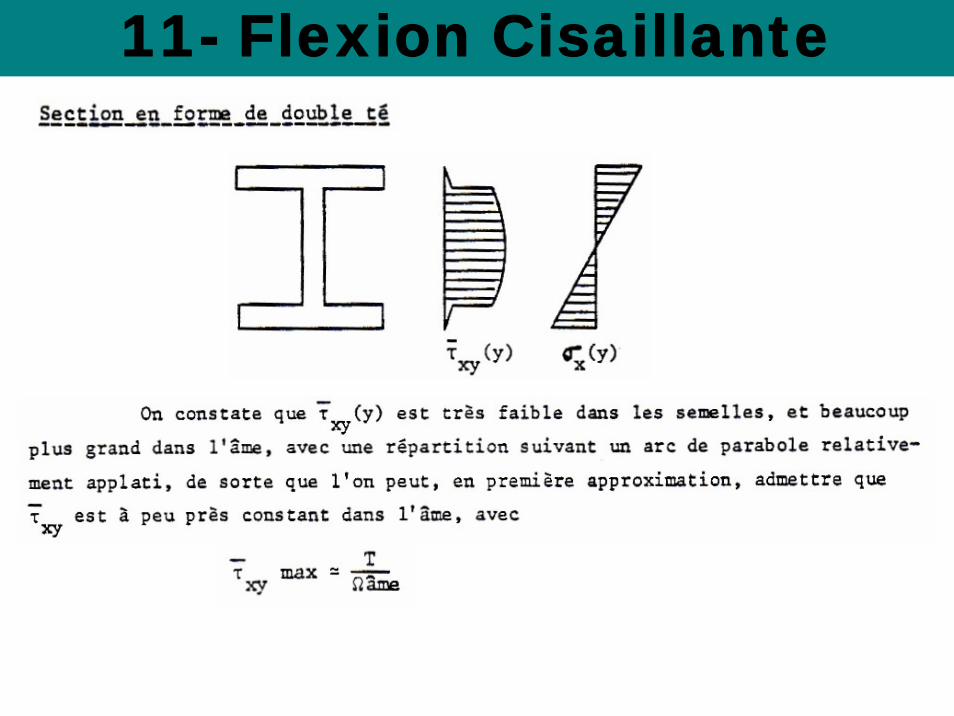
11- Flexion Cisaillante
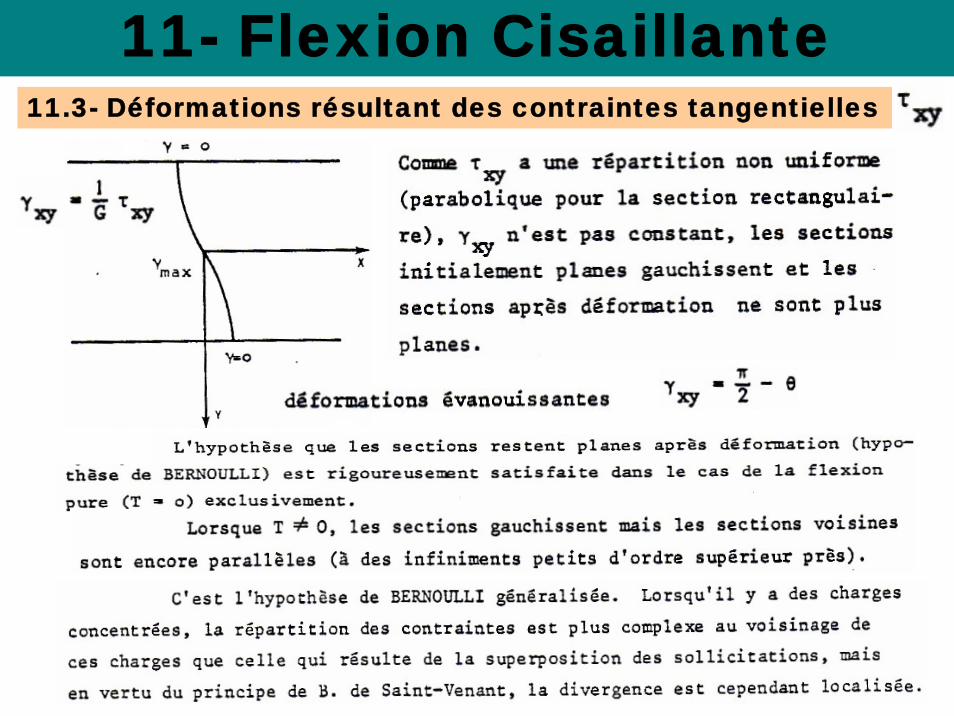
11- Flexion Cisaillante11.3- Déformations résultant des contraintes tangentielles
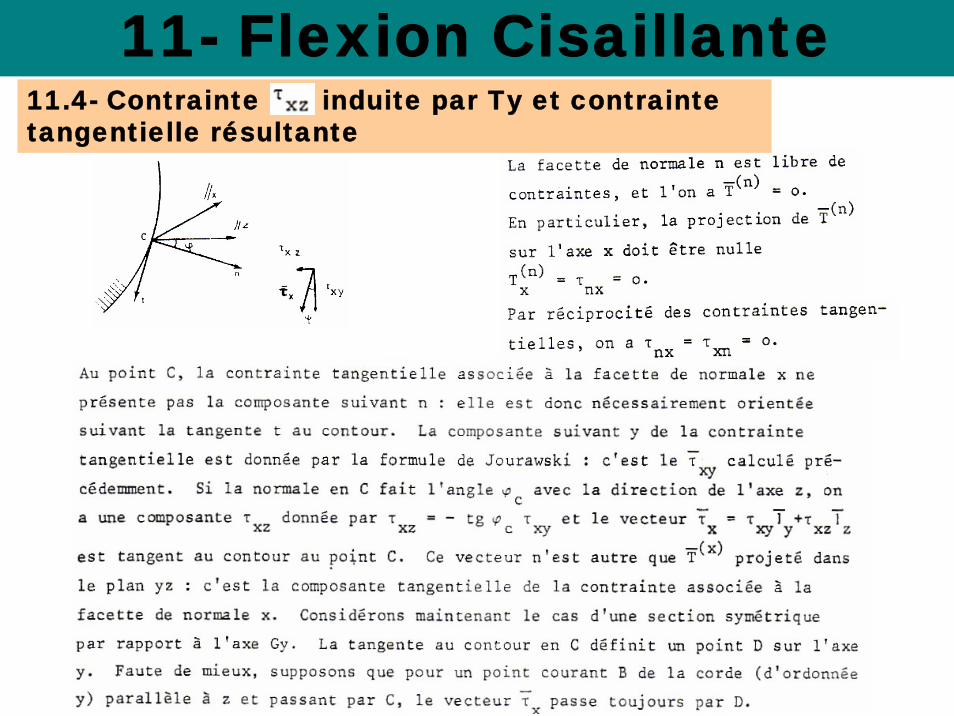
11- Flexion Cisaillante11.4- Contrainte induite par Ty et contrainte tangentielle résultante
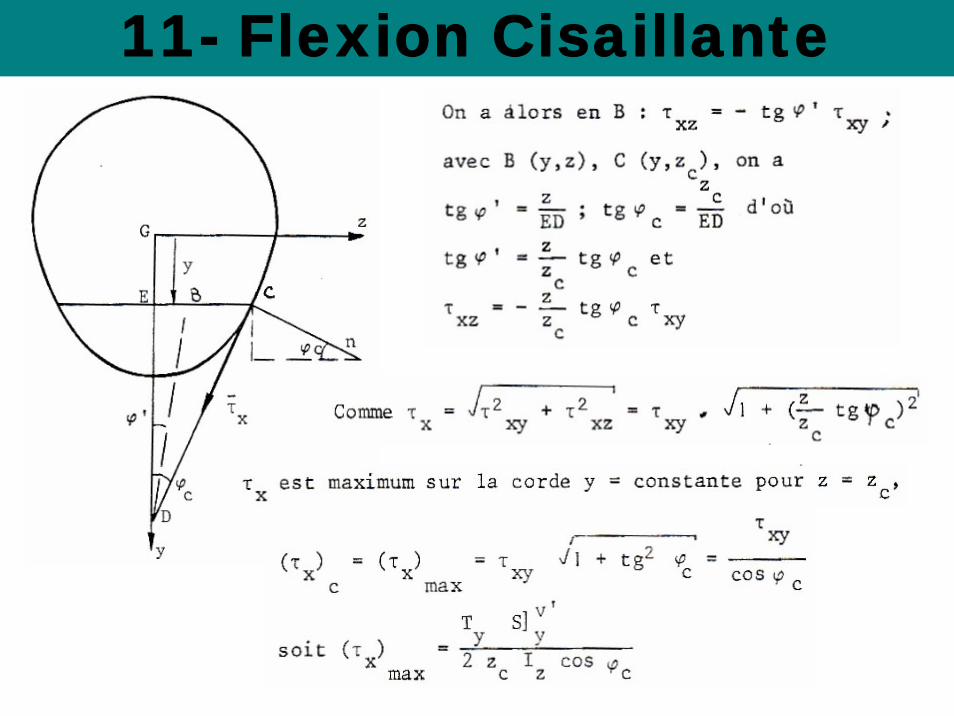
11- Flexion Cisaillante
11- Flexion Cisaillante

11- Flexion Cisaillante
11- Flexion Cisaillante
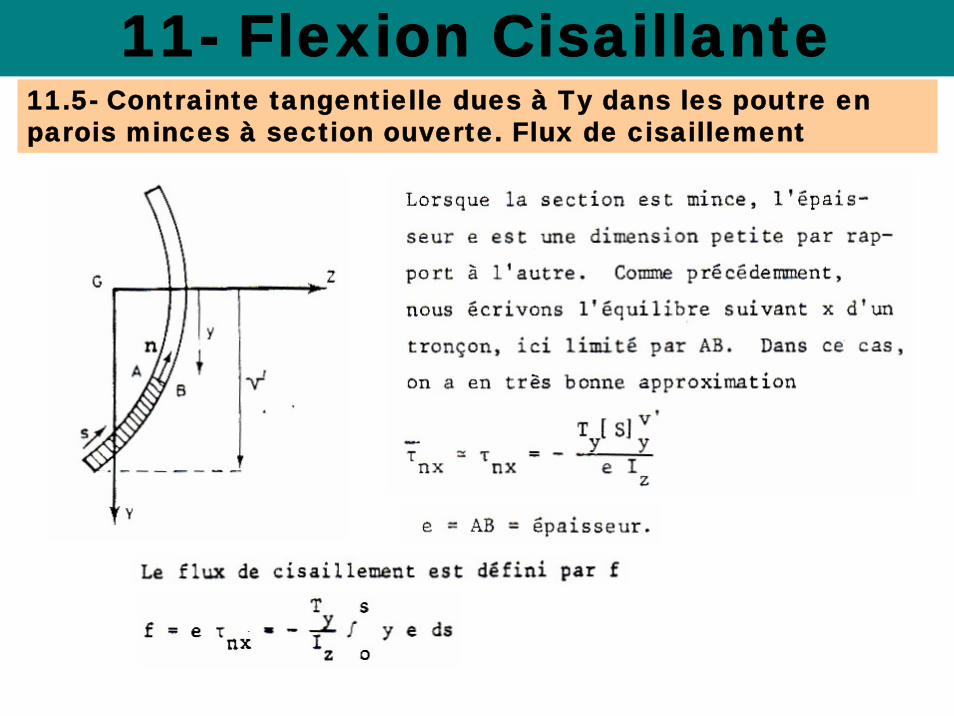
11- Flexion Cisaillante11.5- Contrainte tangentielle dues à Ty dans les poutre en parois minces à section ouverte. Flux de cisaillement
11- Flexion Cisaillante
11- Flexion Cisaillante
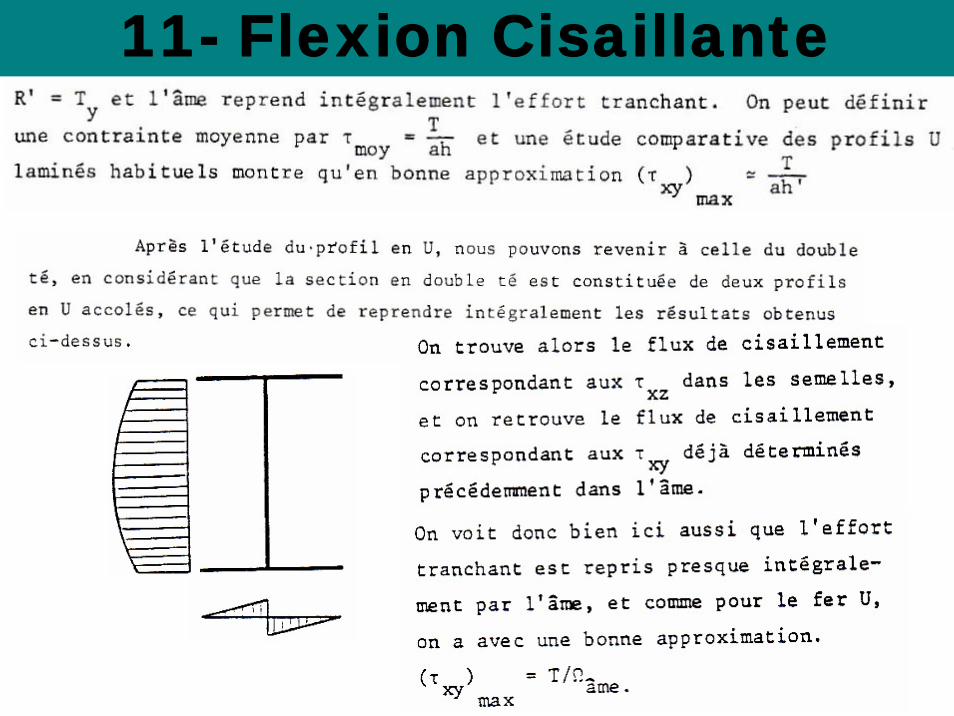
11- Flexion Cisaillante
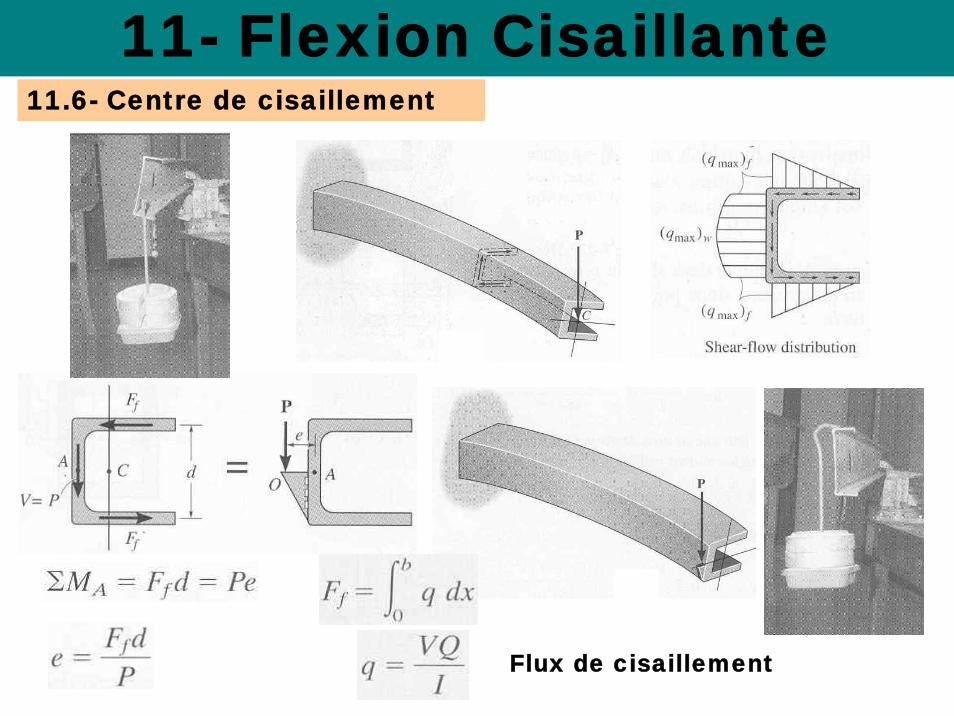
11- Flexion Cisaillante11.6- Centre de cisaillement
Flux de cisaillement
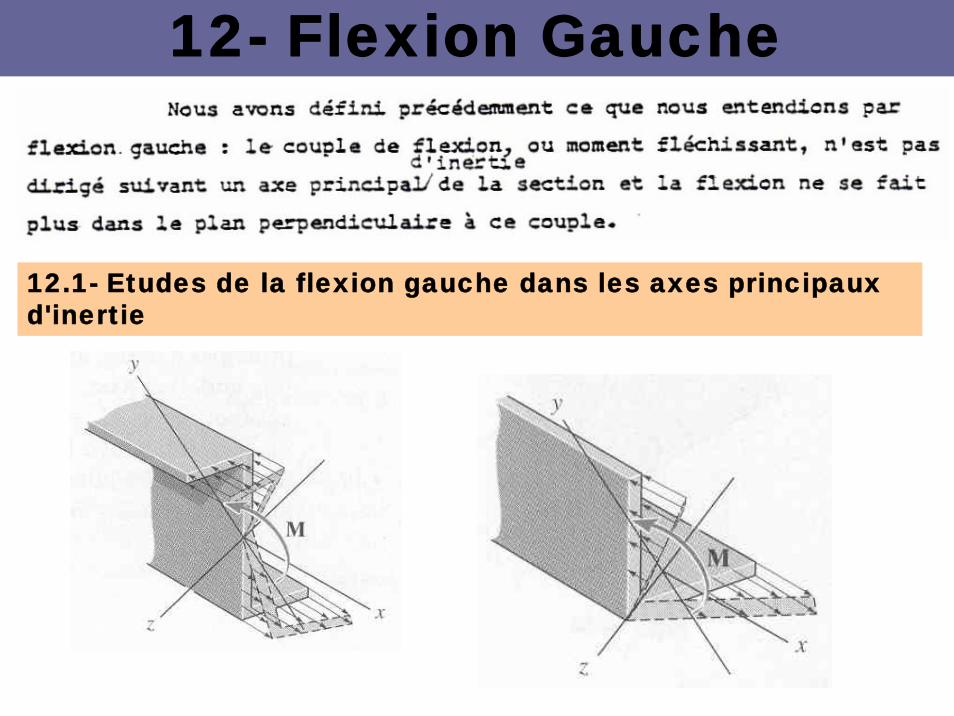
12- Flexion Gauche
12.1- Etudes de la flexion gauche dans les axes principaux d'inertie
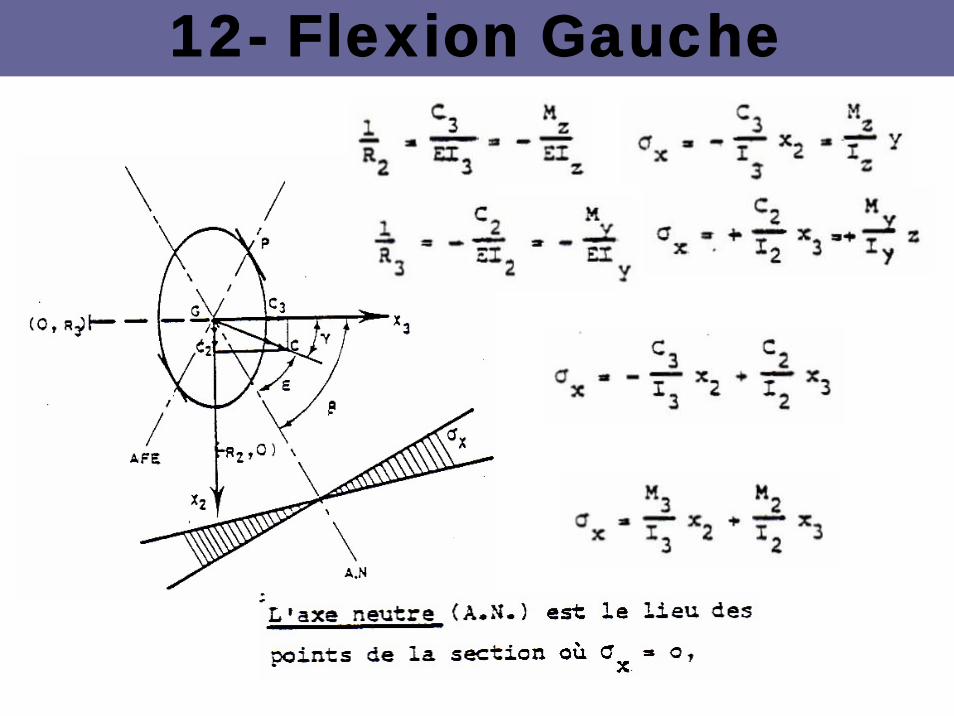
12- Flexion Gauche
12- Flexion Gauche
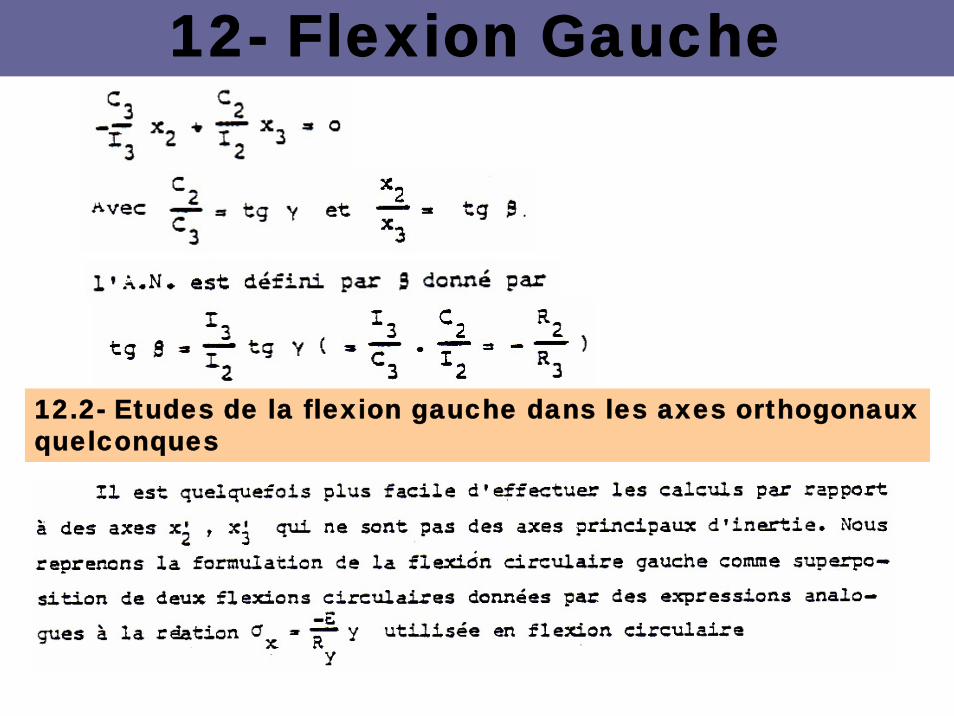
12.2- Etudes de la flexion gauche dans les axes orthogonaux quelconques
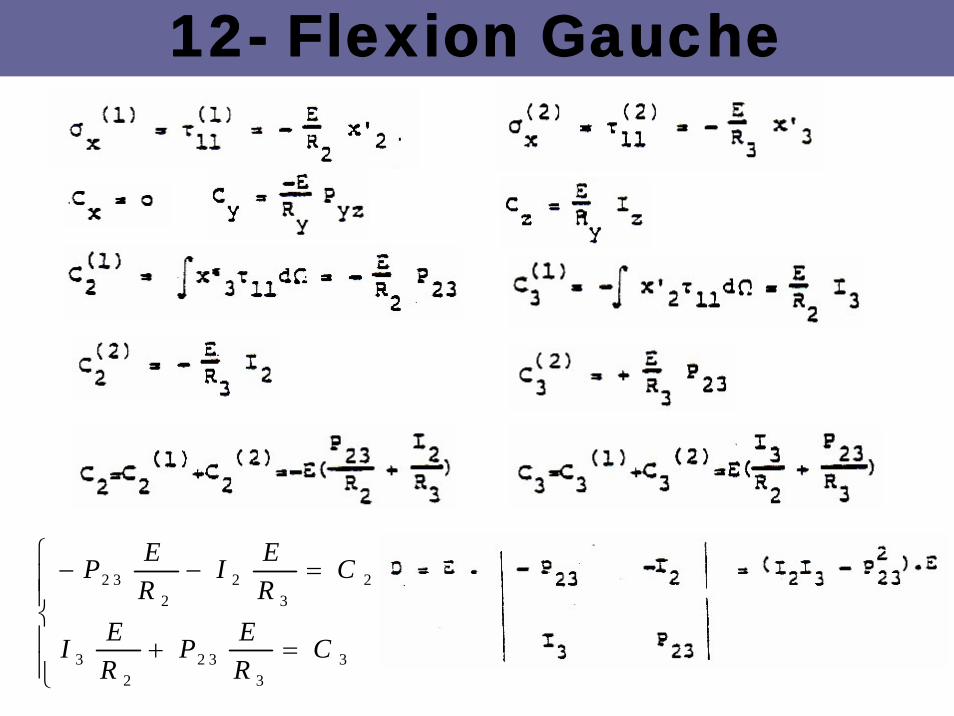
12- Flexion Gauche
2 3 2 22 3
3 2 3 32 3
E EP I CR R
E EI P CR R
⎧ − − =⎪⎪⎨⎪ + =⎪⎩
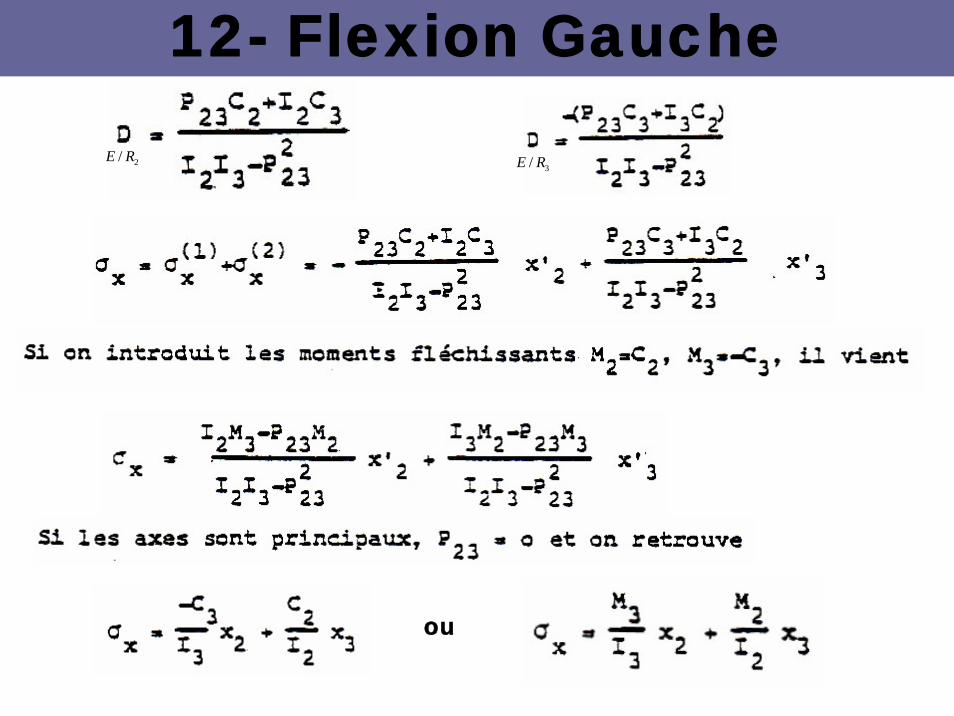
12- Flexion Gauche
ou
2/E R3/E R
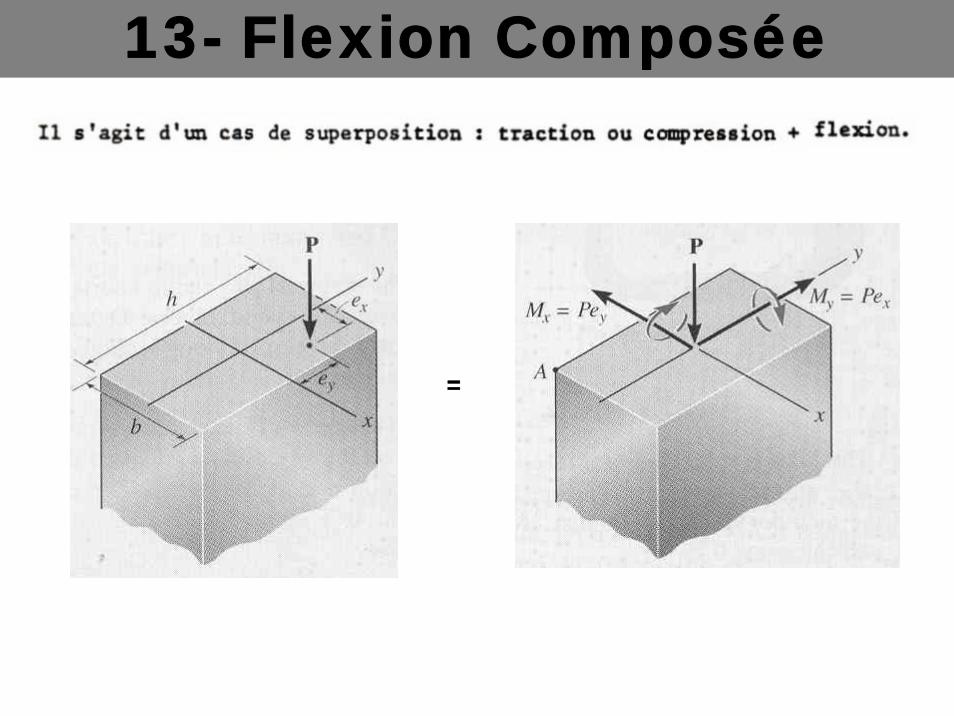
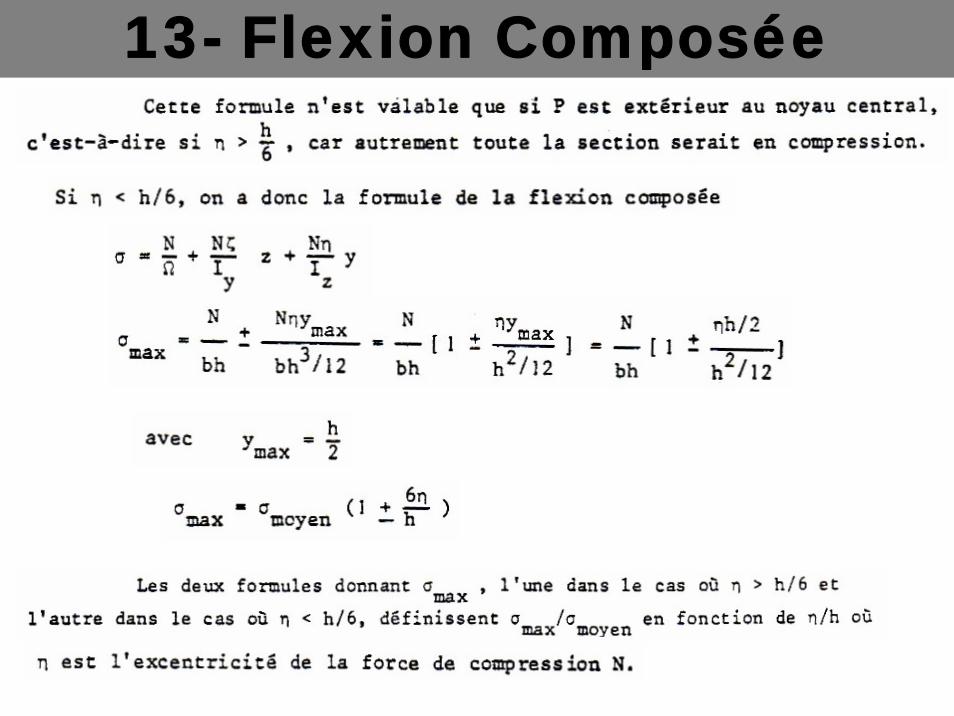
13- Flexion Composée
=
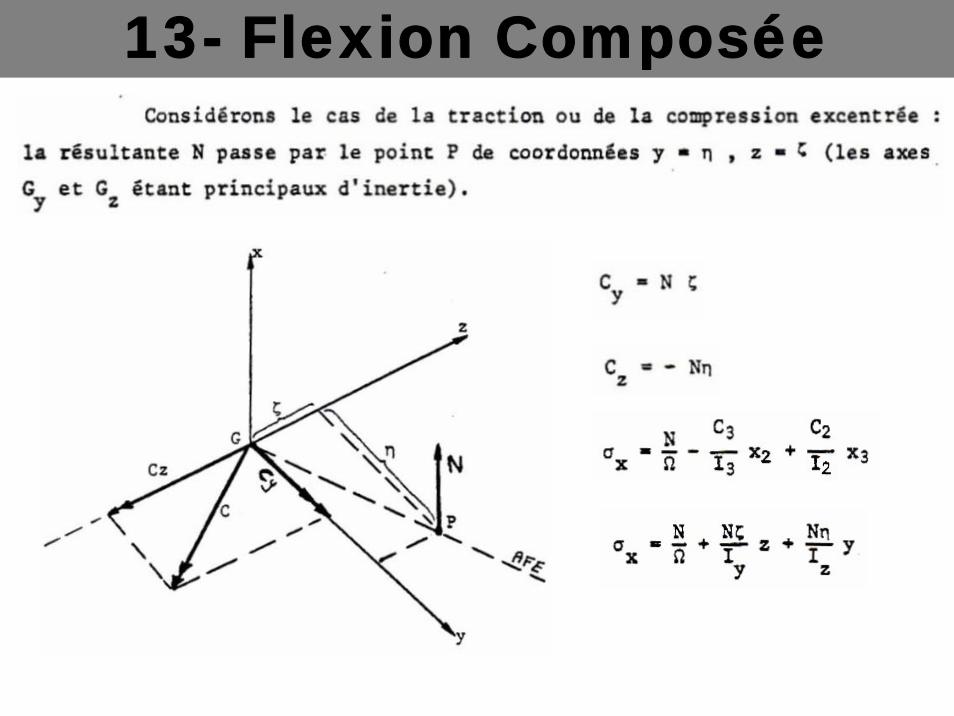
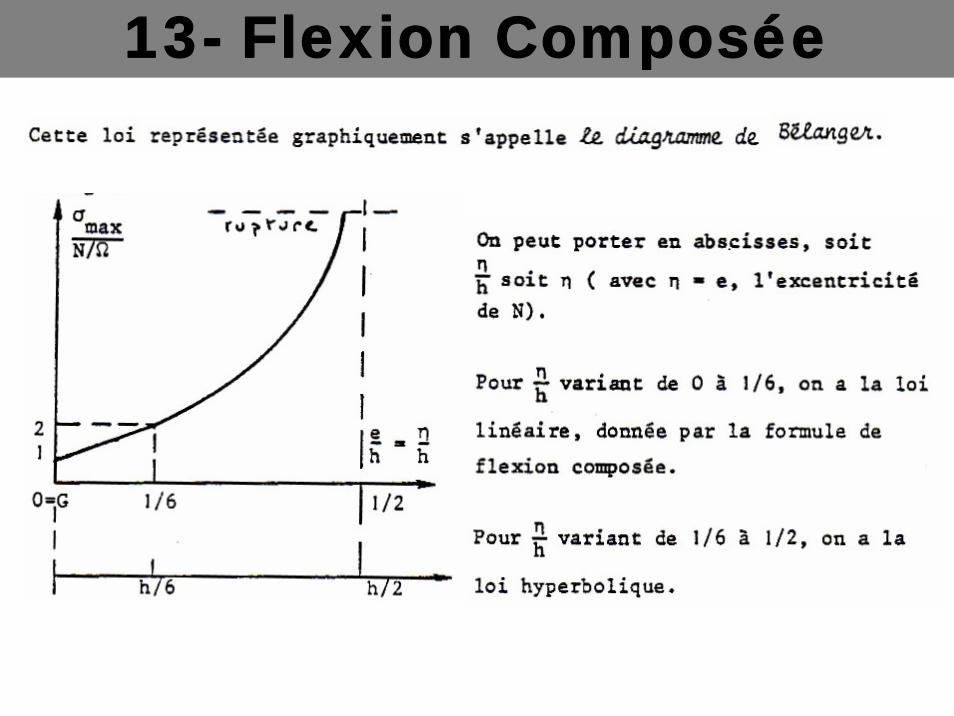
13- Flexion Composée
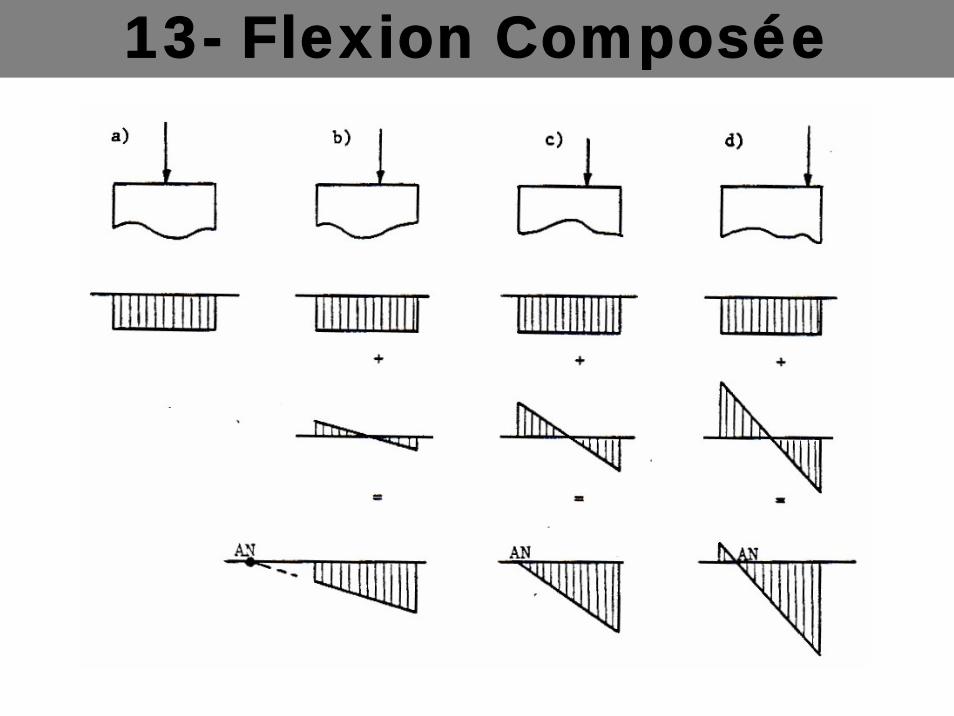
13- Flexion Composée
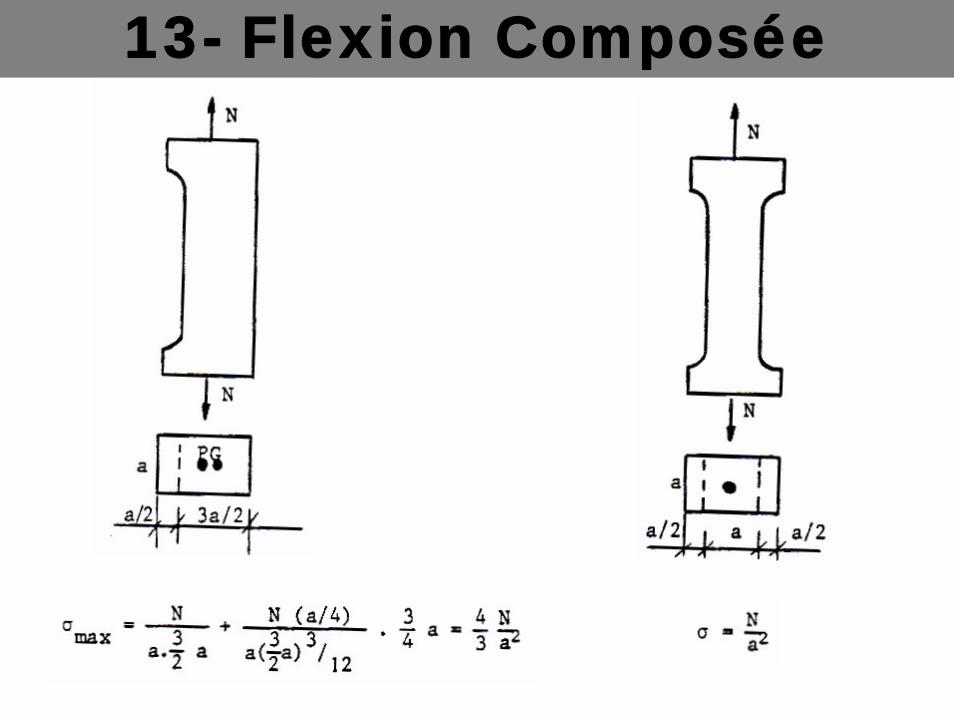
13- Flexion Composée
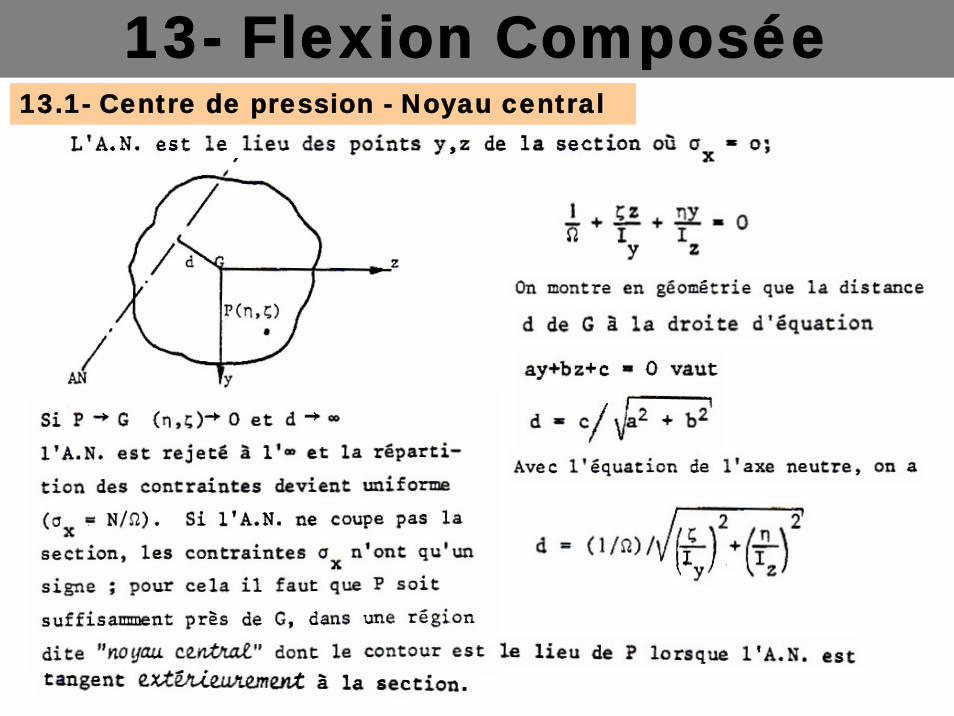
13- Flexion Composée13.1- Centre de pression - Noyau central
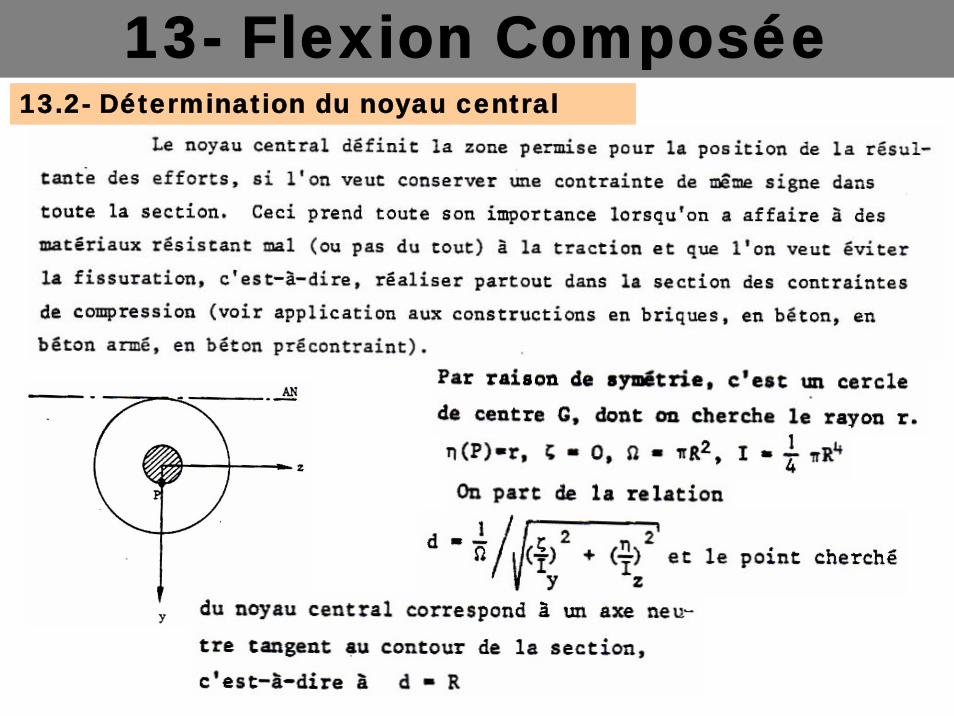
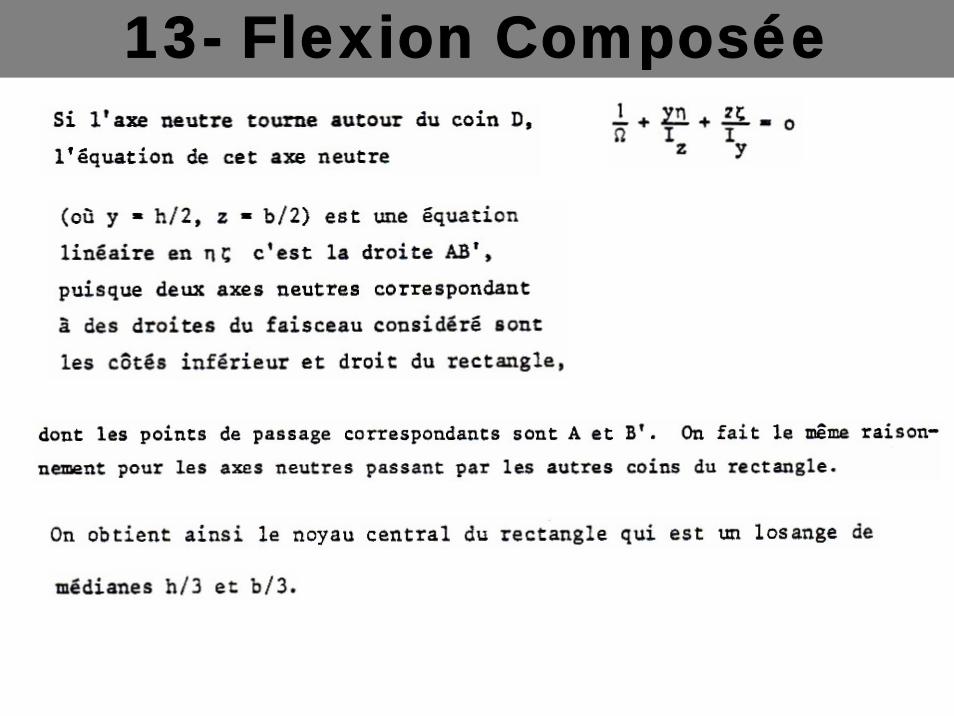
13- Flexion Composée13.2- Détermination du noyau central
13- Flexion Composée
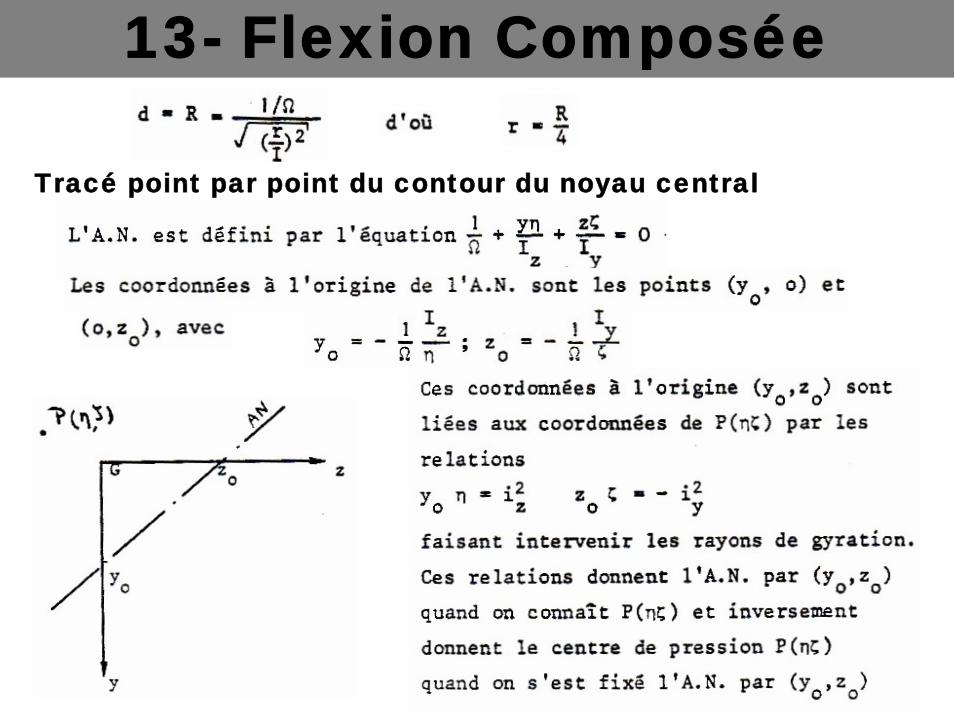
Tracé point par point du contour du noyau central
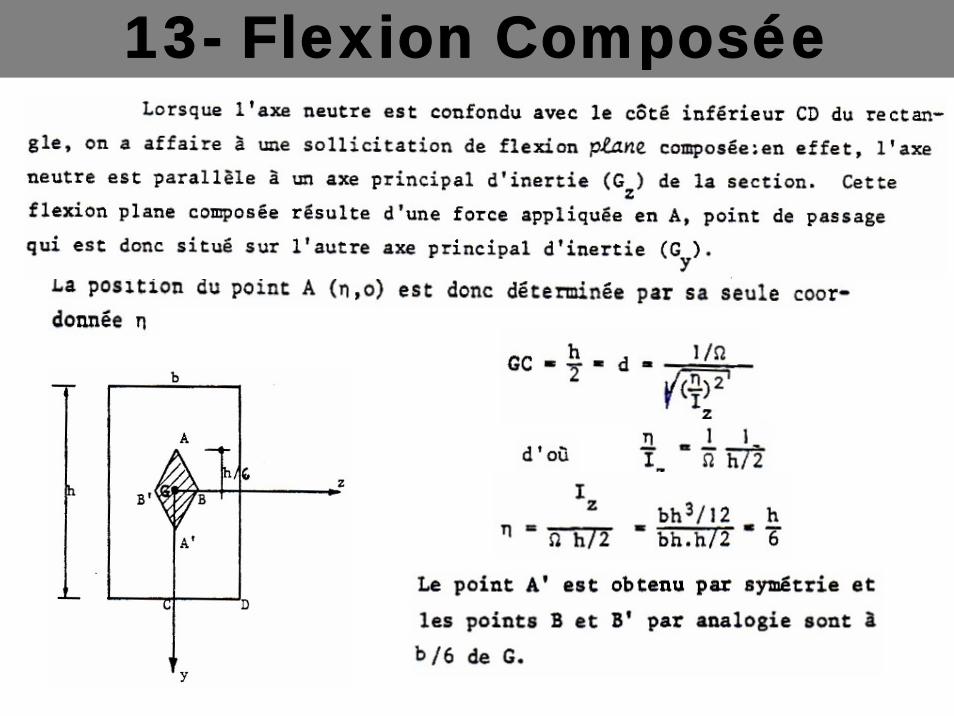
13- Flexion Composée
13- Flexion Composée
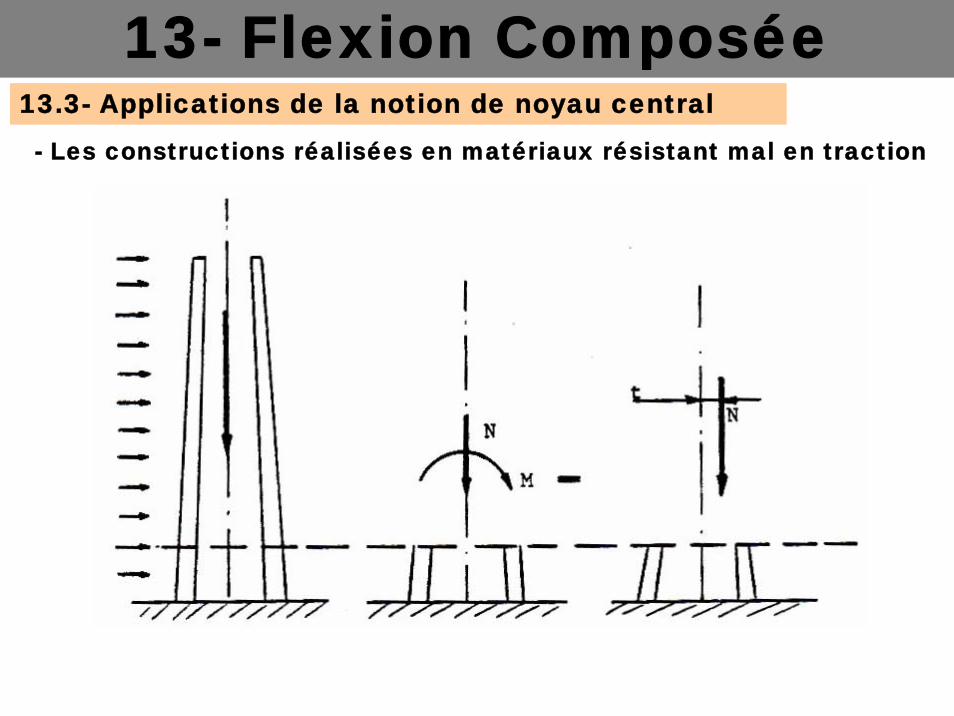
13- Flexion Composée13.3- Applications de la notion de noyau central
- Les constructions réalisées en matériaux résistant mal en traction
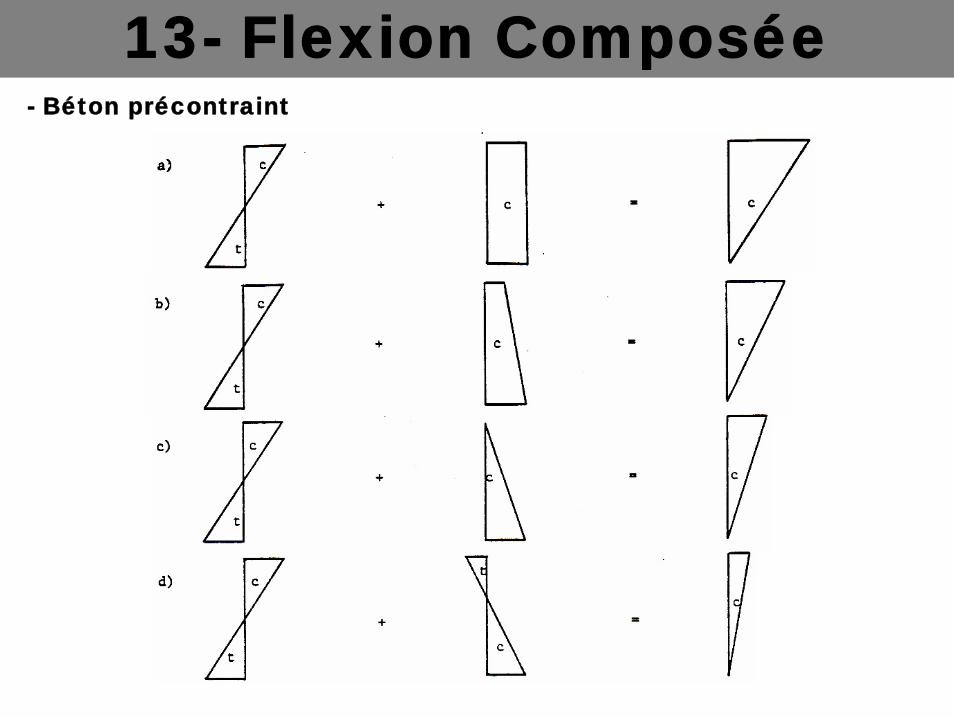
13- Flexion Composée- Béton précontraint
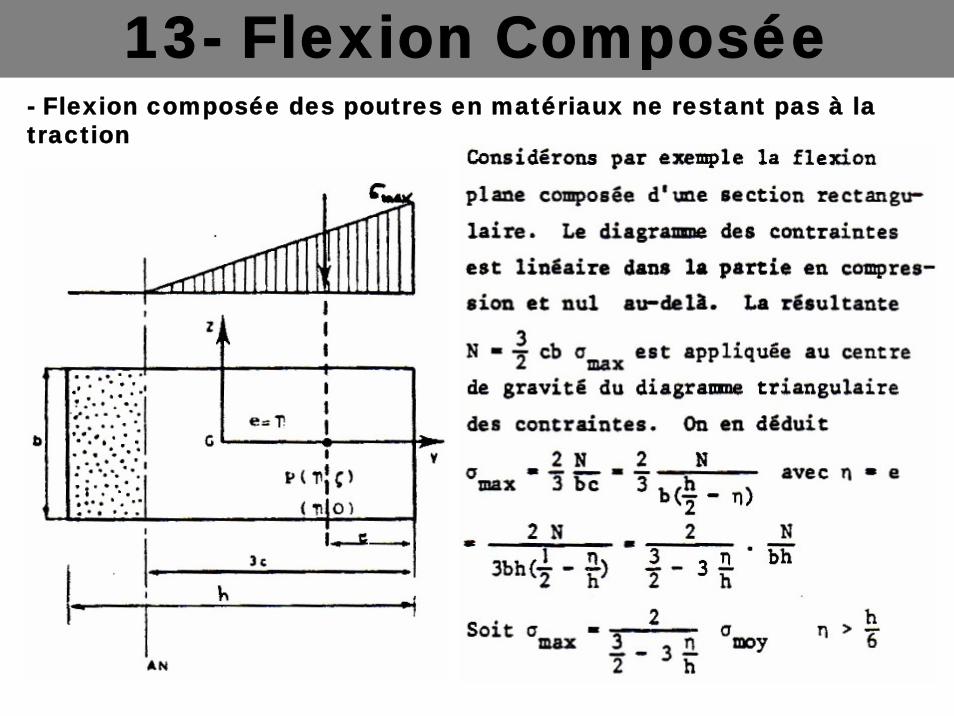
13- Flexion Composée- Flexion composée des poutres en matériaux ne restant pas à la traction
13- Flexion Composée
13- Flexion Composée
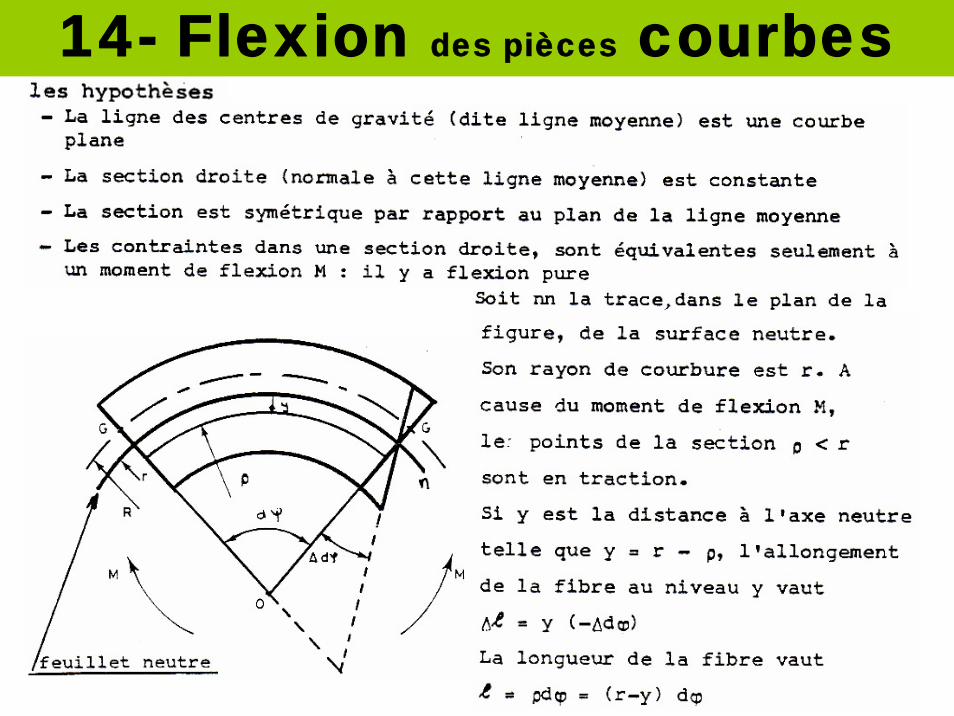
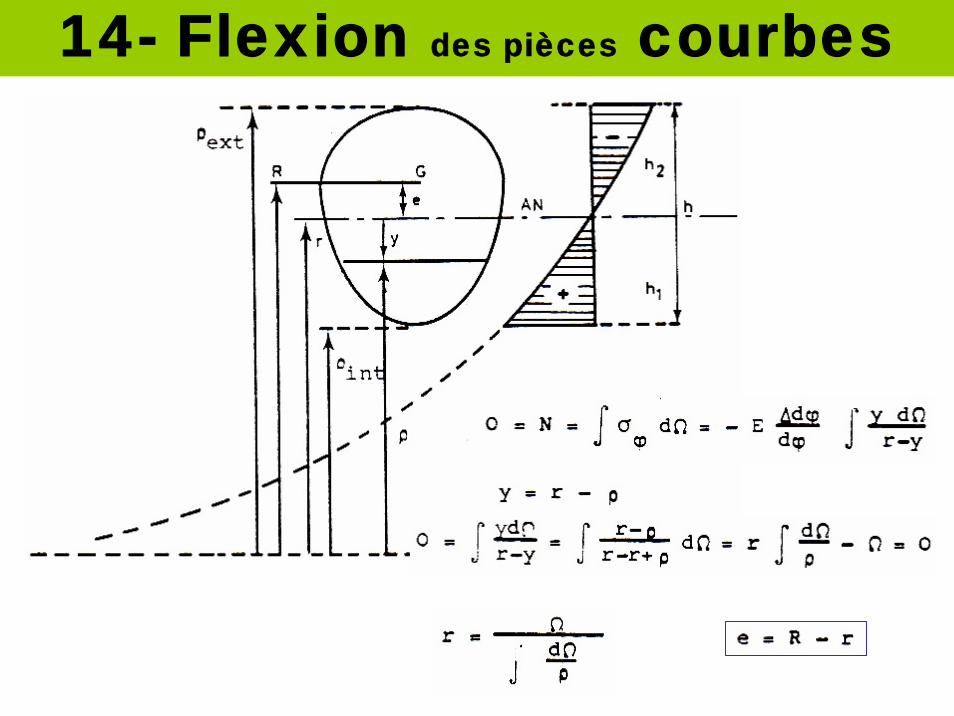
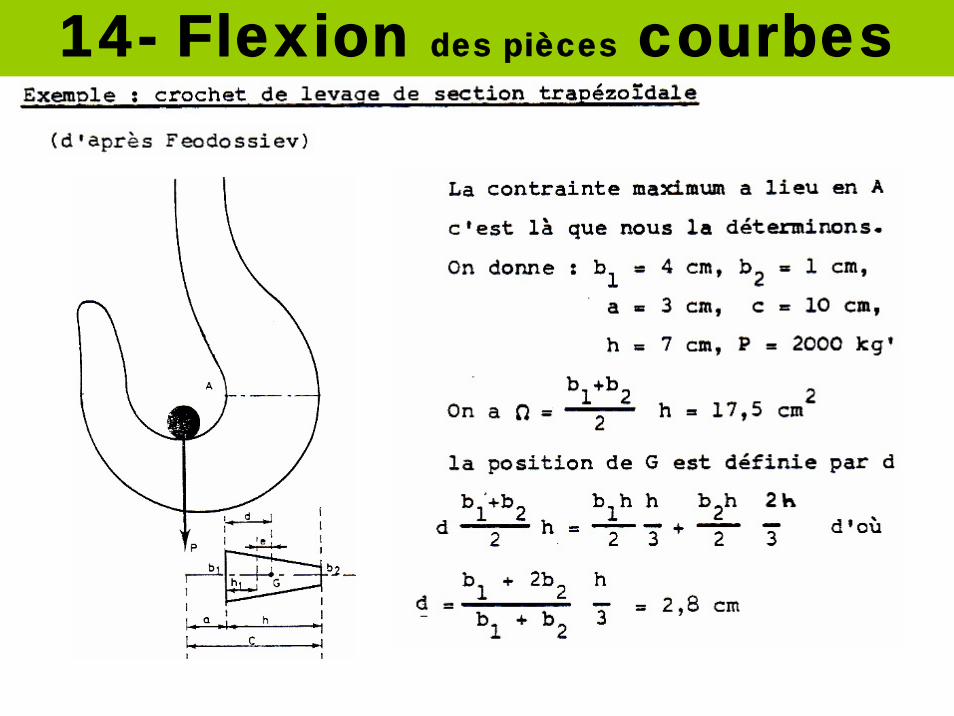
14- Flexion des pièces courbes
14- Flexion des pièces courbes
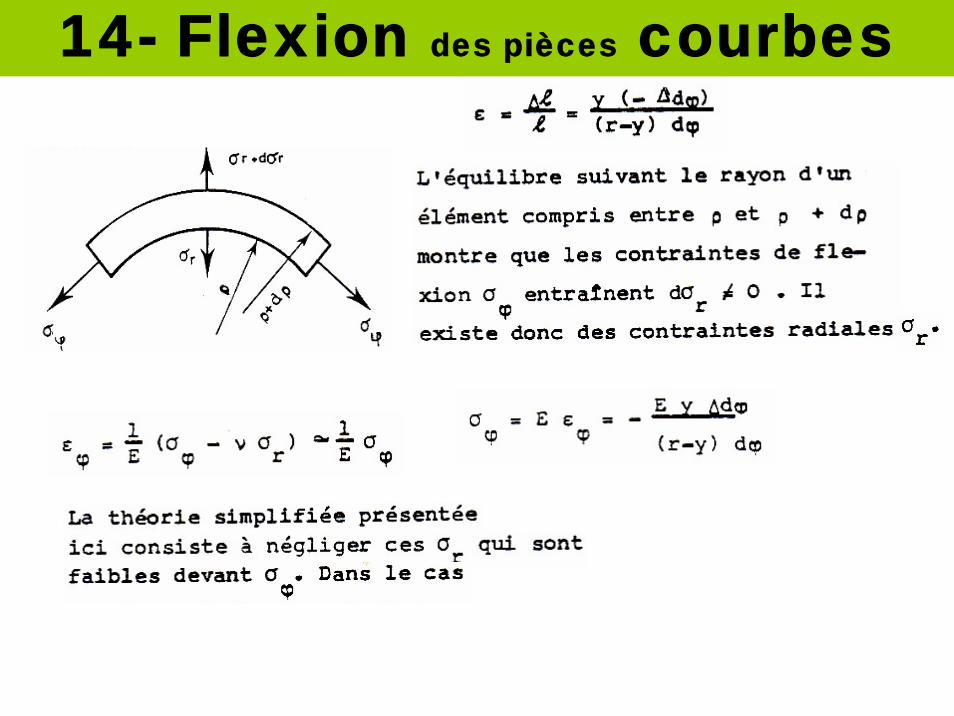
14- Flexion des pièces courbes
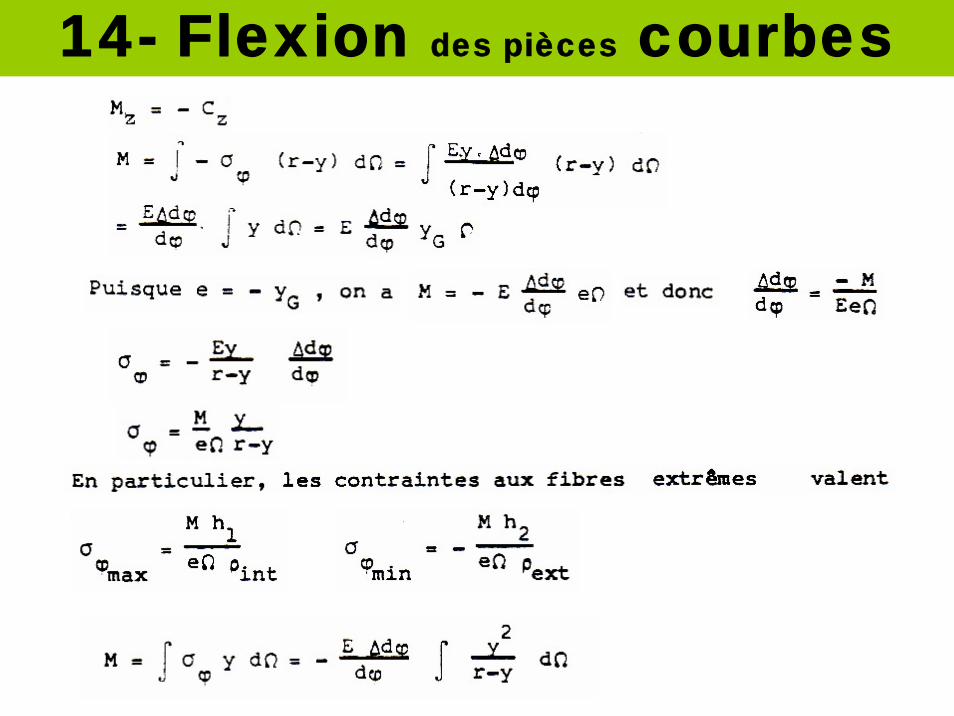
14- Flexion des pièces courbes
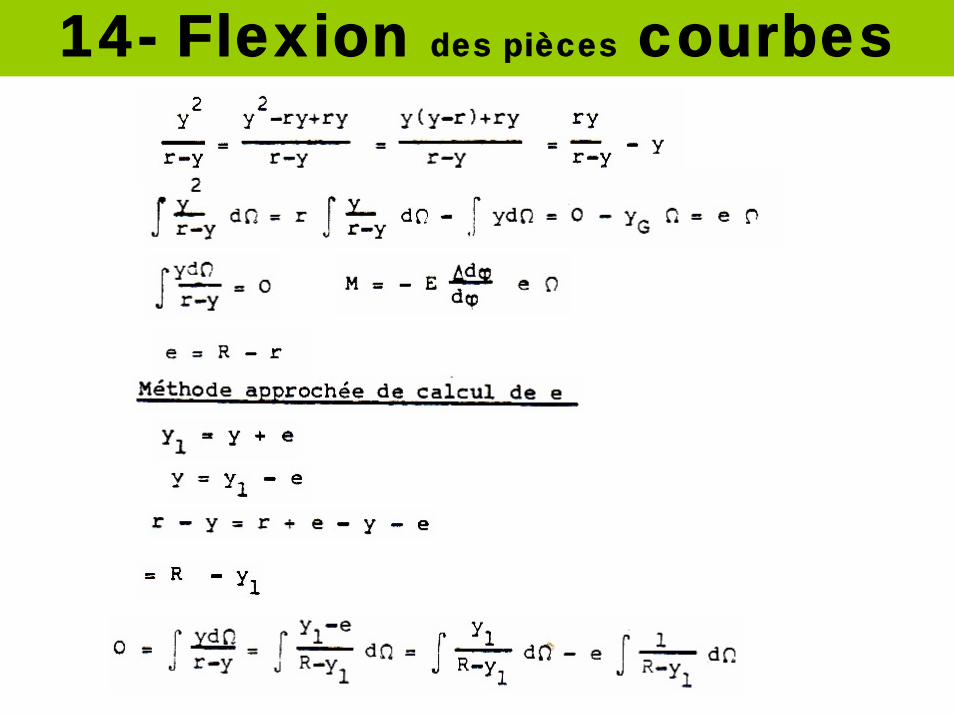
14- Flexion des pièces courbes
14- Flexion des pièces courbes
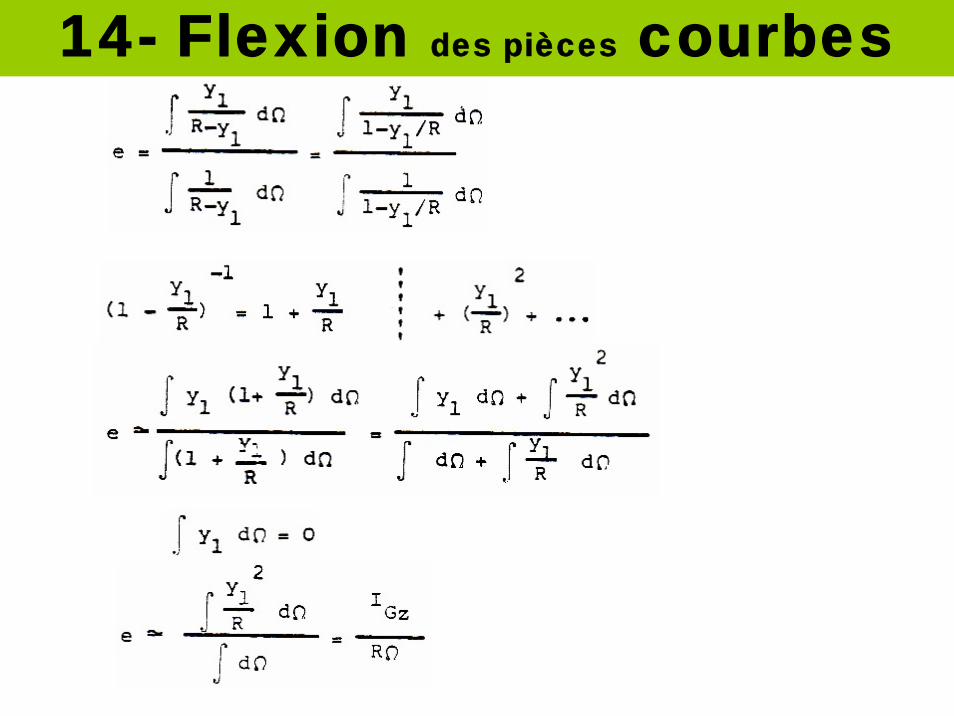
14- Flexion des pièces courbes
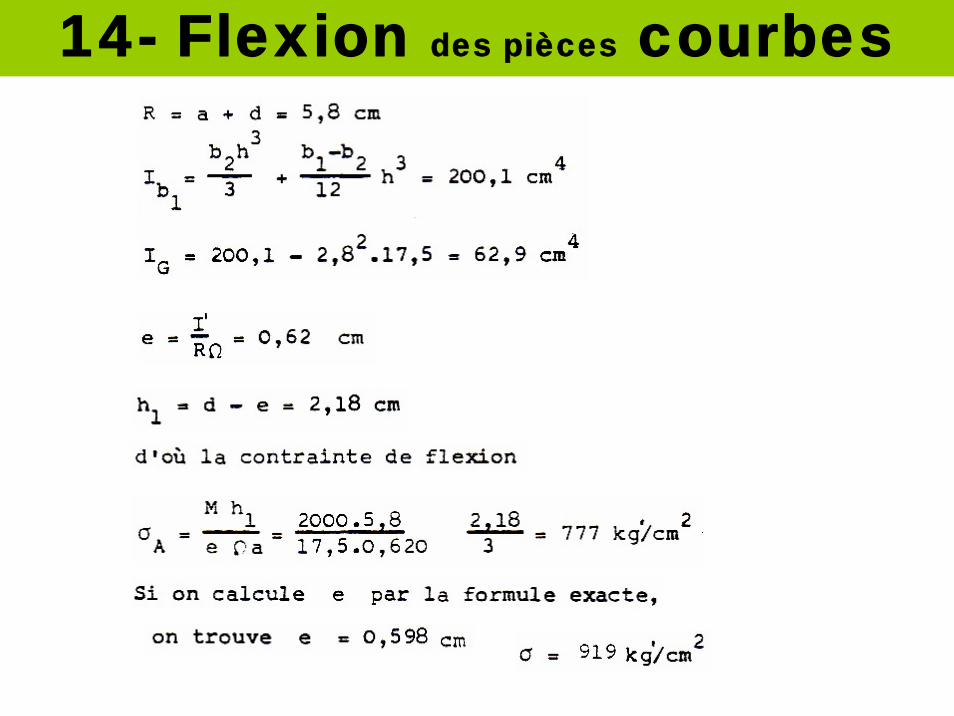
14- Flexion des pièces courbes
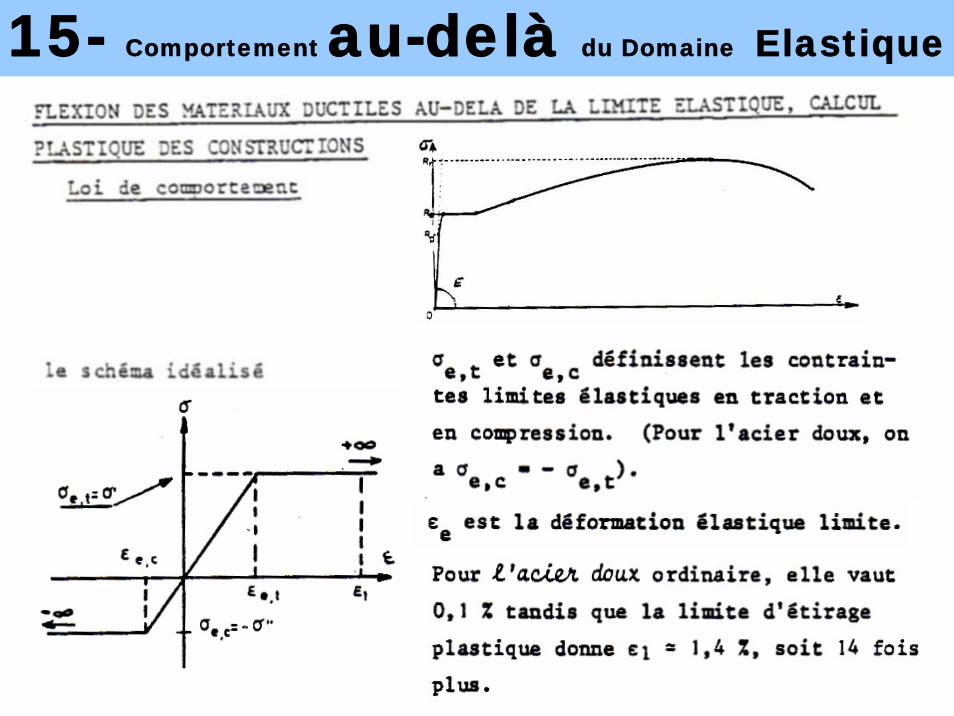
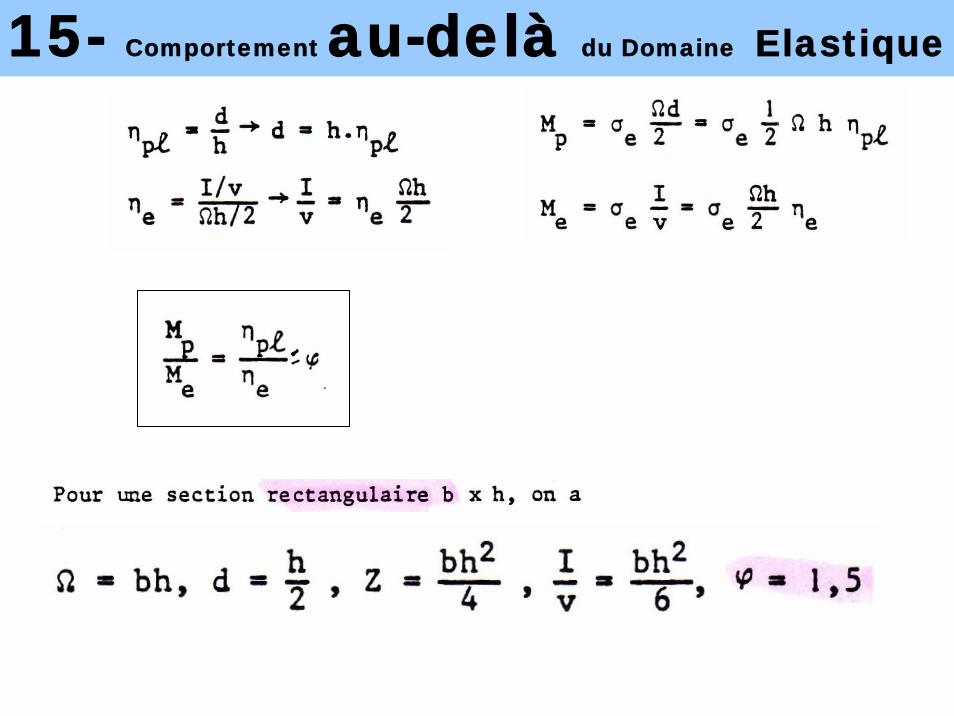
15- Comportement au-delà du Domaine Elastique
15- Comportement au-delà du Domaine Elastique
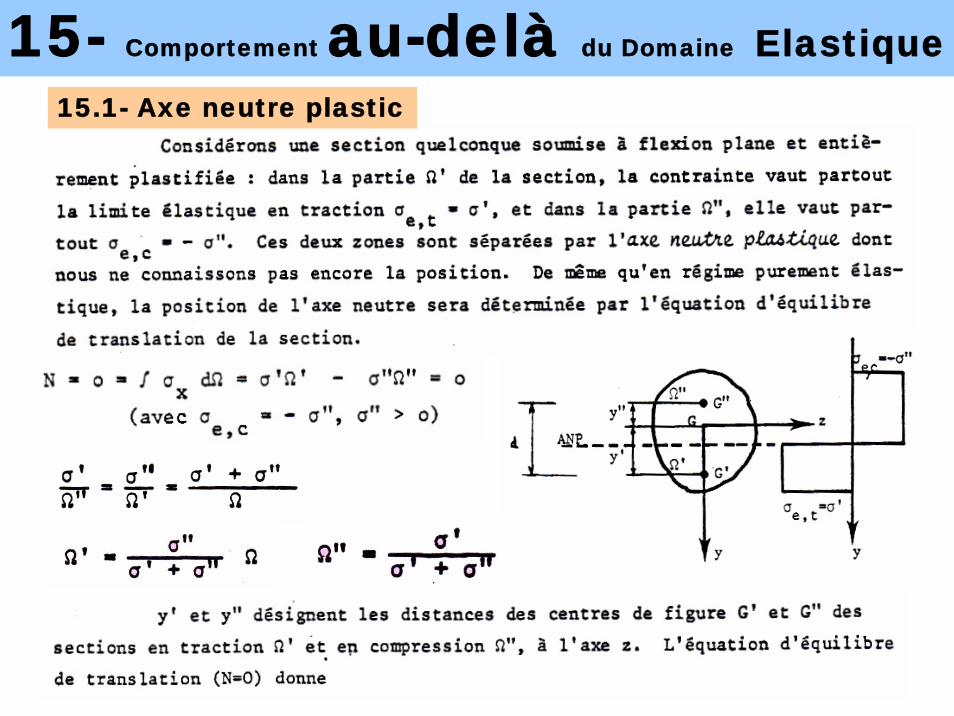
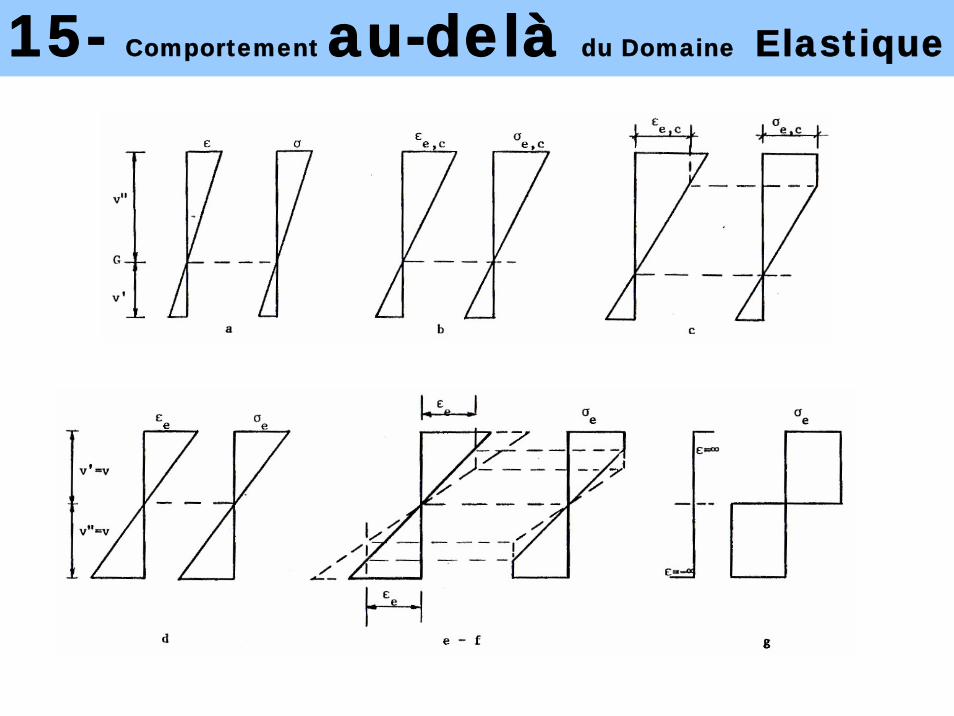
15- Comportement au-delà du Domaine Elastique15.1- Axe neutre plastic
15- Comportement au-delà du Domaine Elastique
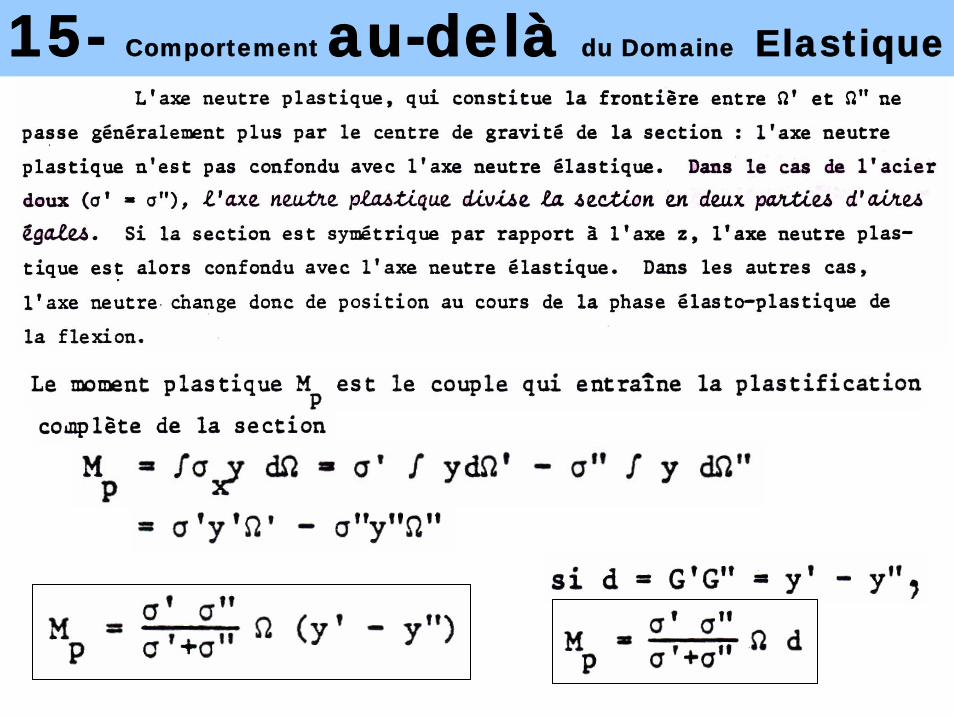
15- Comportement au-delà du Domaine Elastique
15- Comportement au-delà du Domaine Elastique
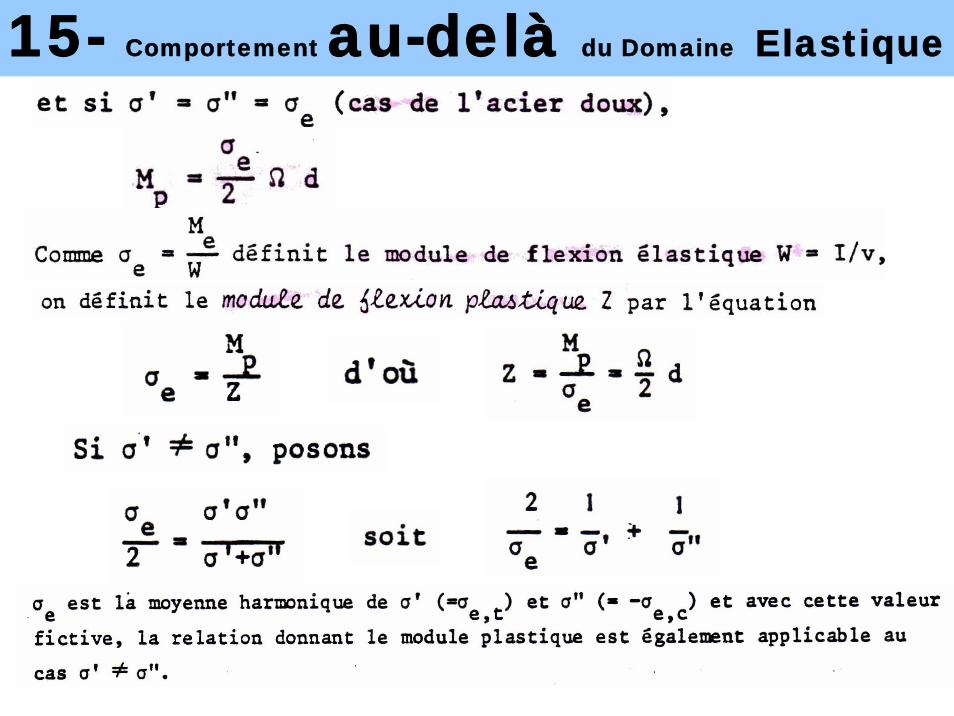
15- Comportement au-delà du Domaine Elastique
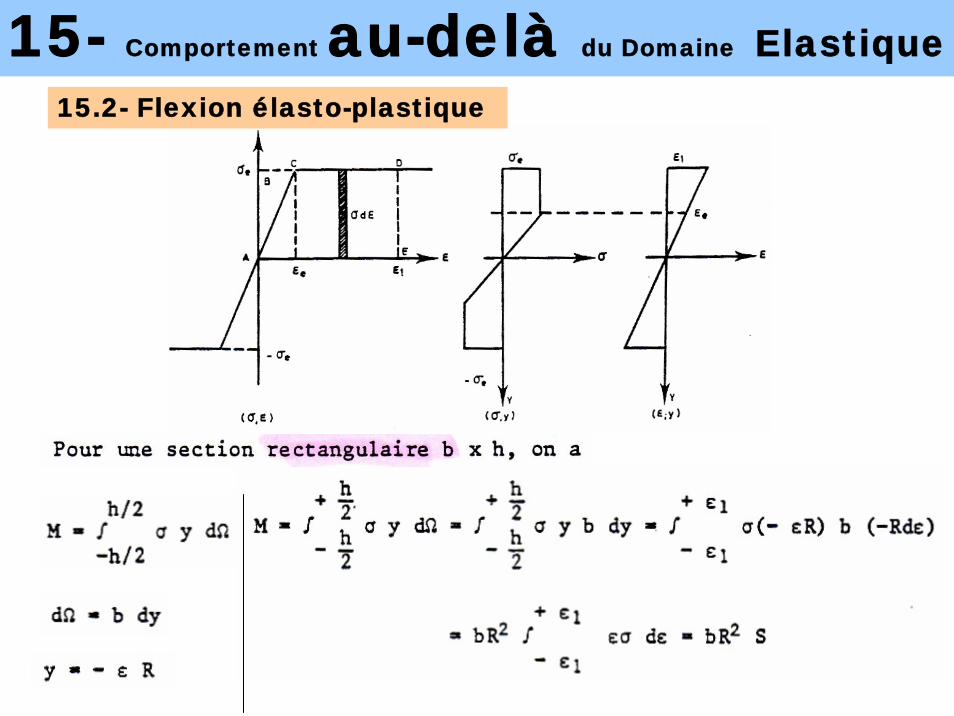
15- Comportement au-delà du Domaine Elastique15.2- Flexion élasto-plastique
15- Comportement au-delà du Domaine Elastique
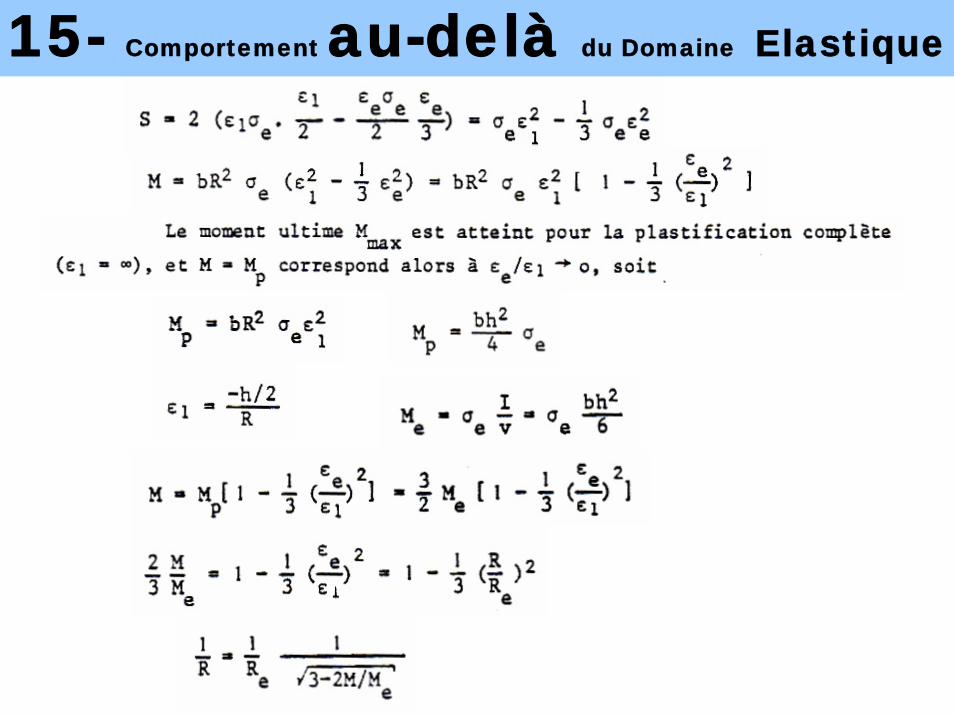
15- Comportement au-delà du Domaine Elastique
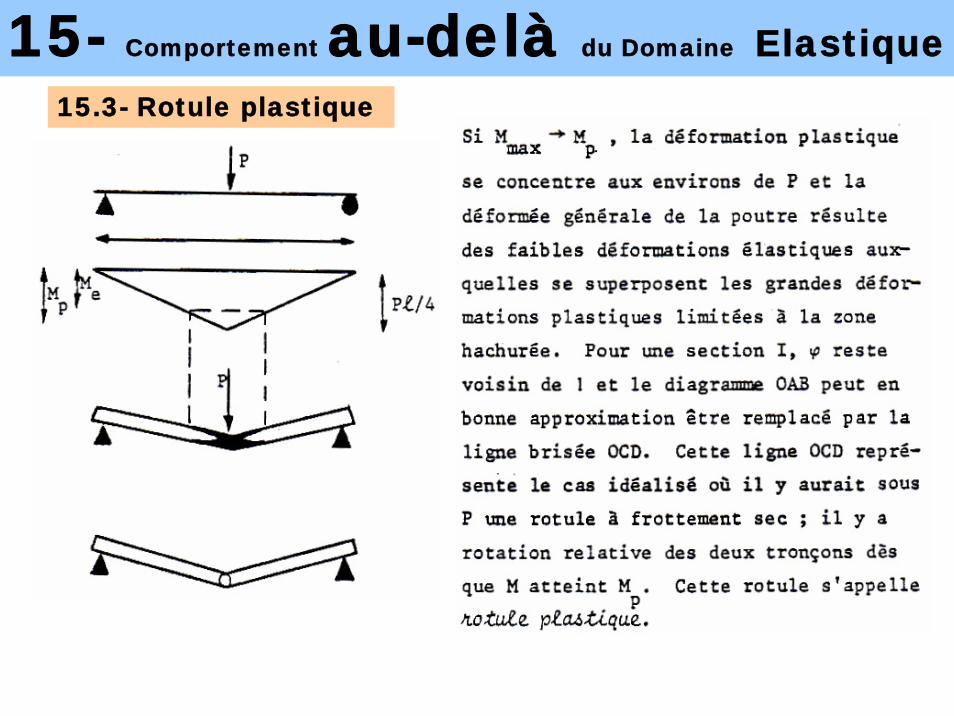
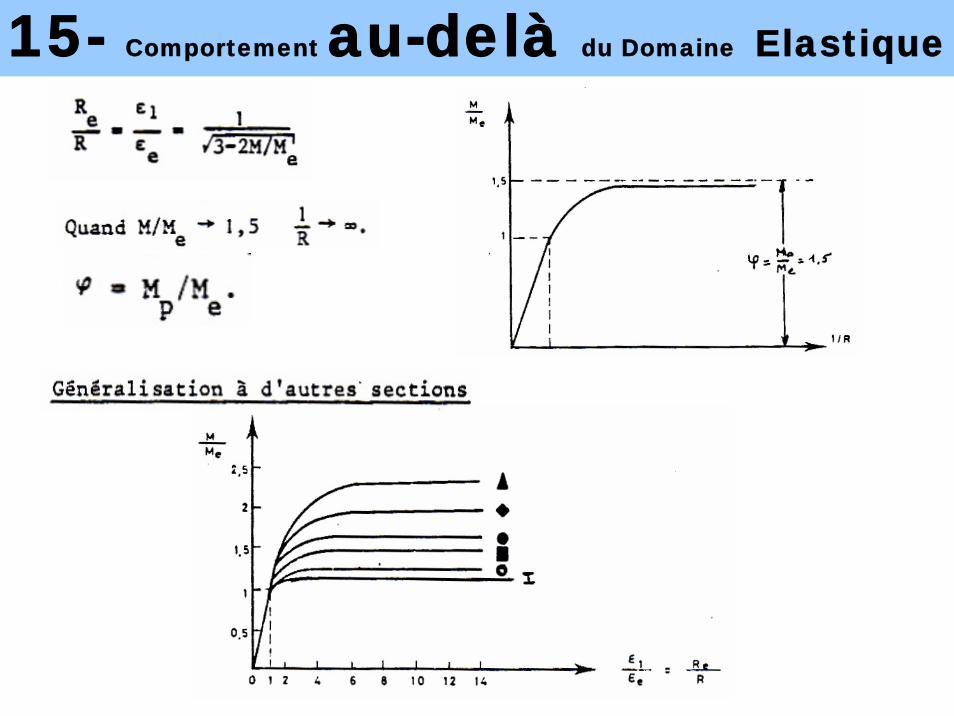
15- Comportement au-delà du Domaine Elastique15.3- Rotule plastique
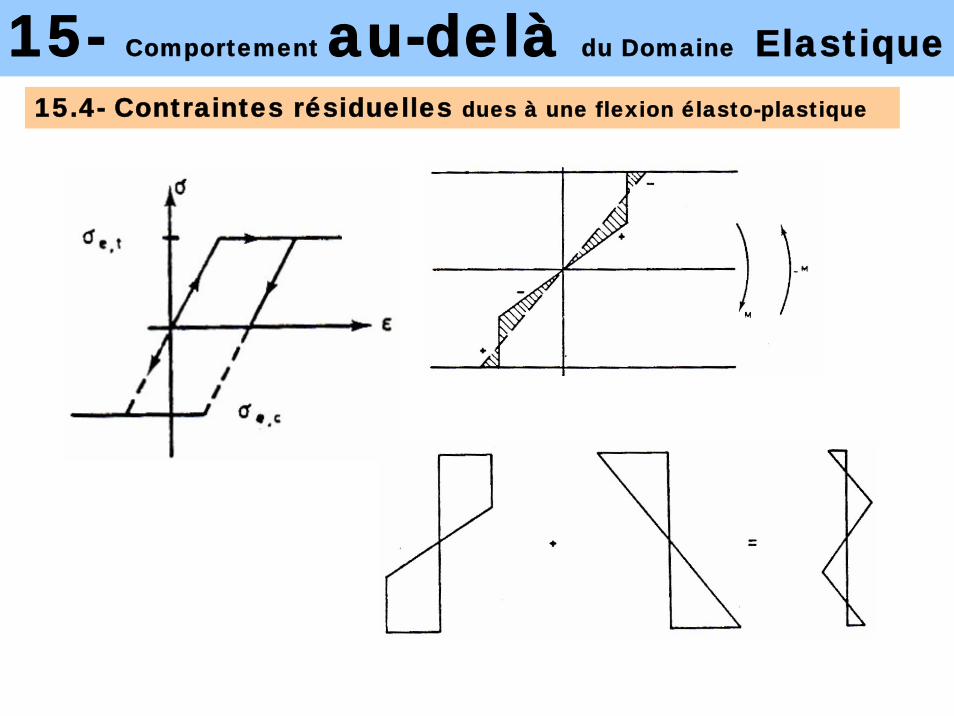
15- Comportement au-delà du Domaine Elastique15.4- Contraintes résiduelles dues à une flexion élasto-plastique
16- Calcul des Déplacements de la Poutre
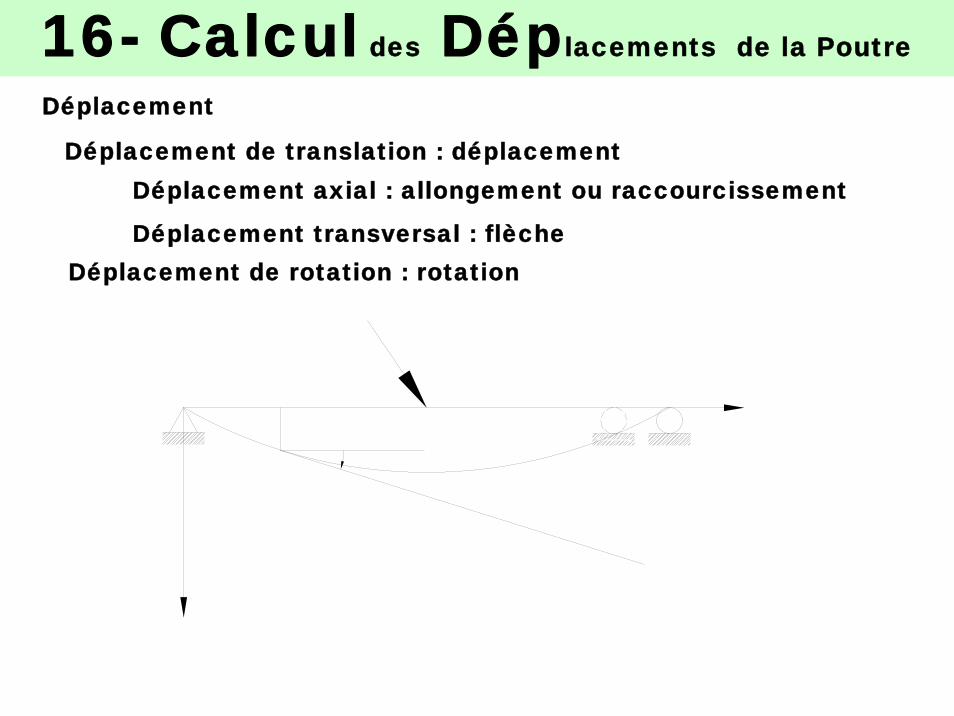
Déplacement de translation : déplacement
Déplacement
Déplacement axial : allongement ou raccourcissement
Déplacement transversal : flècheDéplacement de rotation : rotation
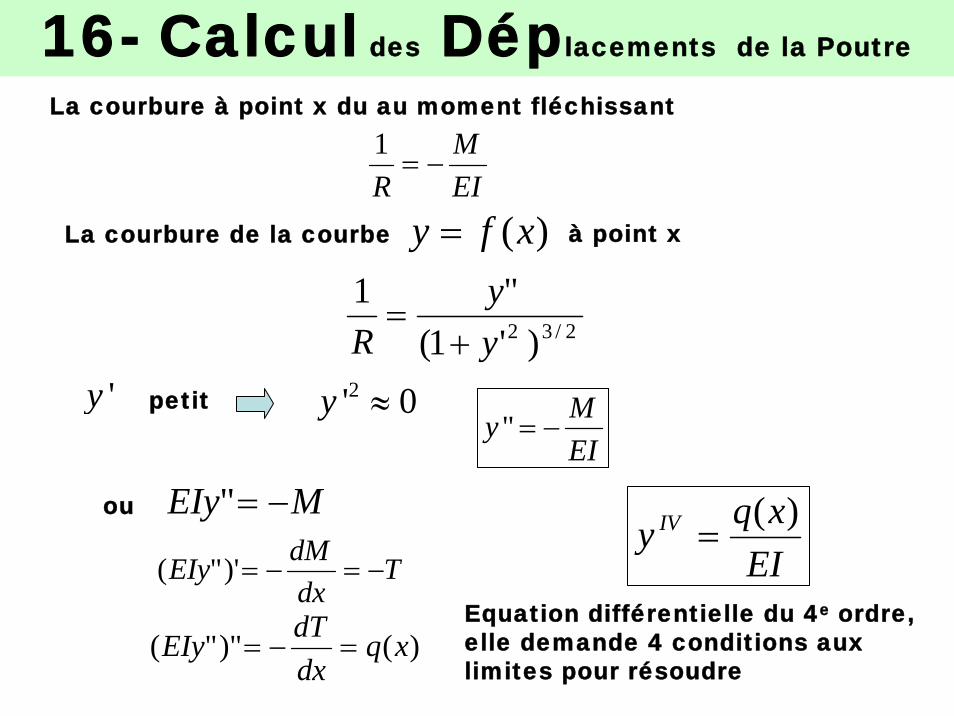
La courbure à point x du au moment fléchissant1 MR EI= −
La courbure de la courbe )(xfy = à point x
2/32 )'1("1
yy
R +=
'y 2' 0y ≈petit
MEIy −="
" MyEI
= −
ou
TdxdMEIy −=−=)'"(
)()""( xqdxdTEIy =−=
EIxqy IV )(
=
Equation différentielle du 4e ordre, elle demande 4 conditions aux limites pour résoudre
16- Calcul des Déplacements de la Poutre
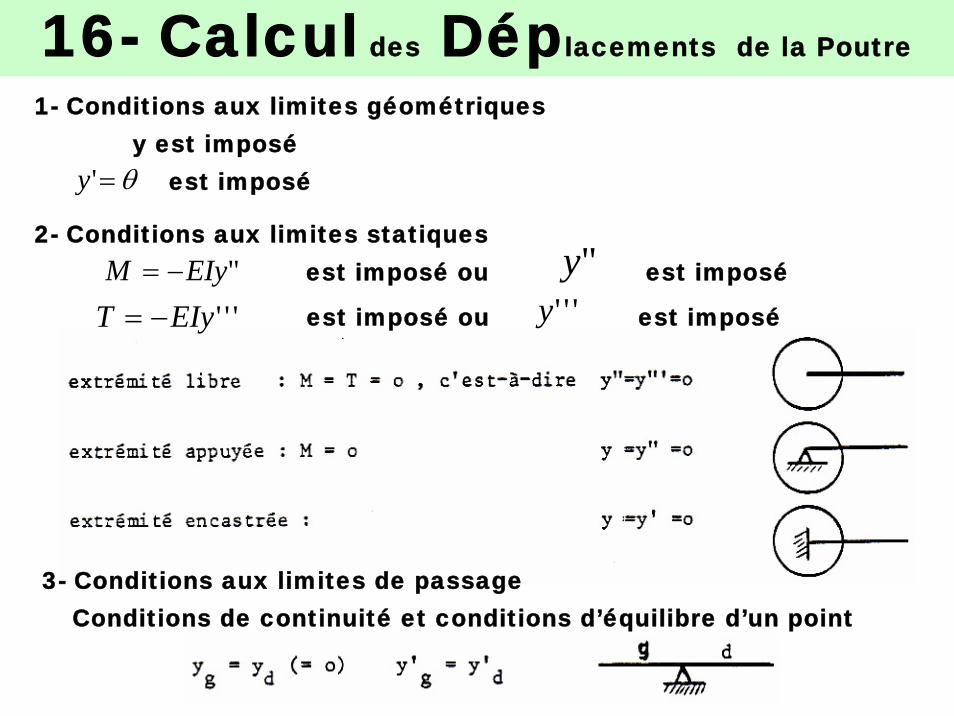
1- Conditions aux limites géométriques y est imposéθ='y est imposé
2- Conditions aux limites statiques"EIyM −= est imposé ou "y est imposé
'''EIyT −= '''yest imposé ou est imposé
3- Conditions aux limites de passageConditions de continuité et conditions d’équilibre d’un point
16- Calcul des Déplacements de la Poutre
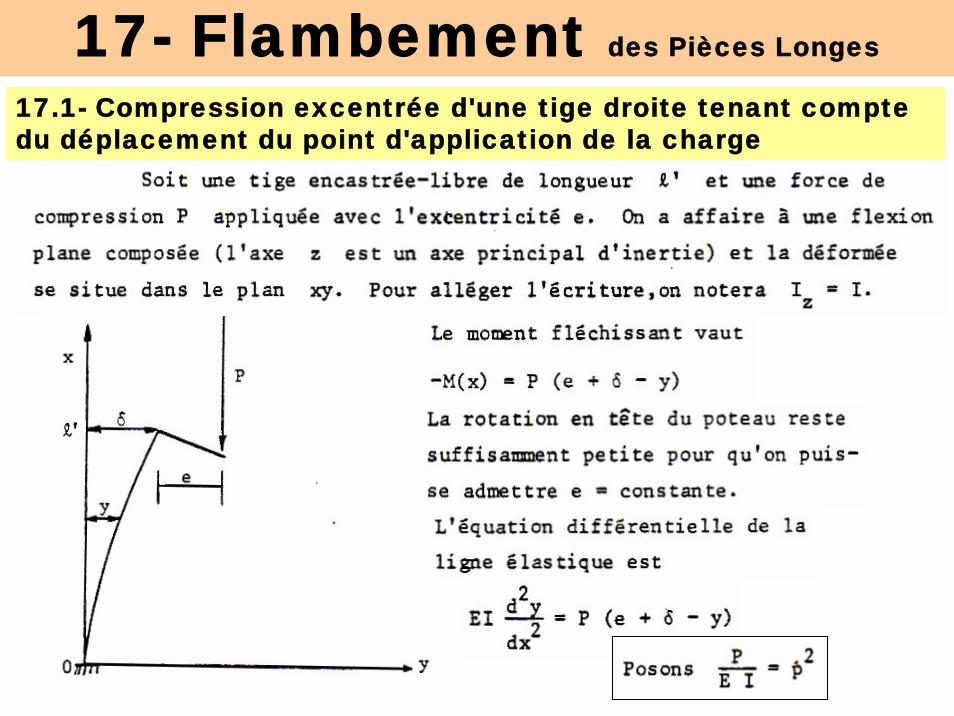
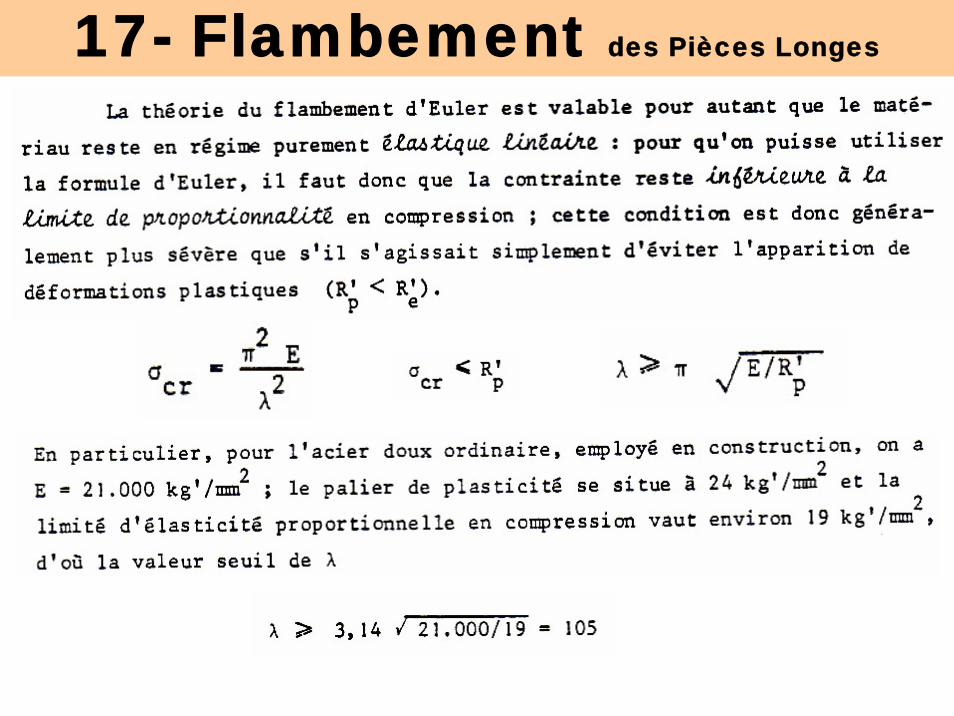
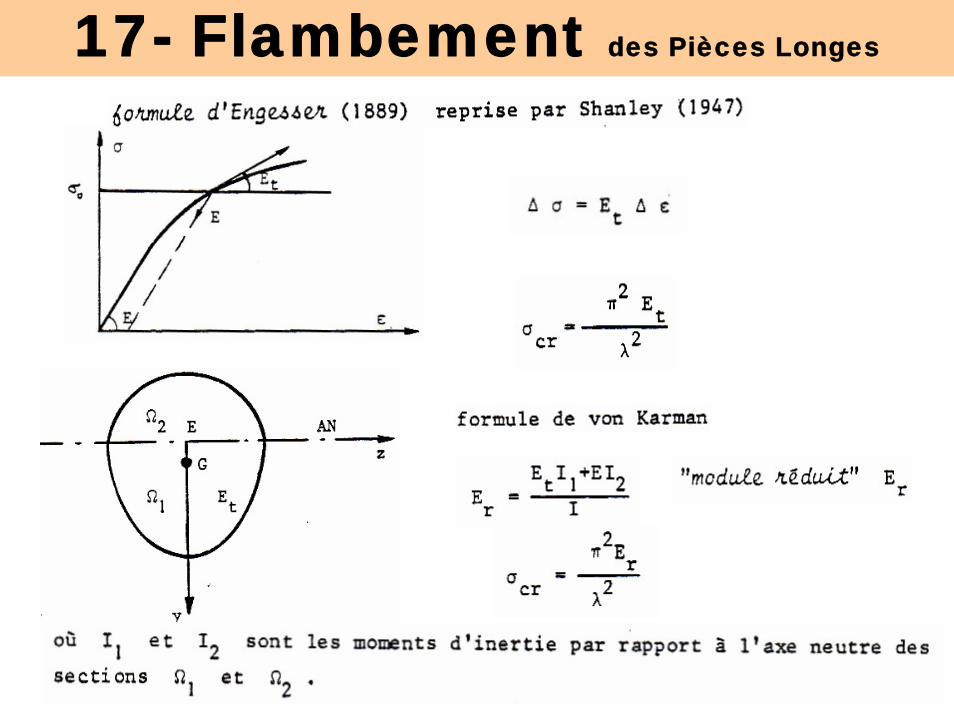
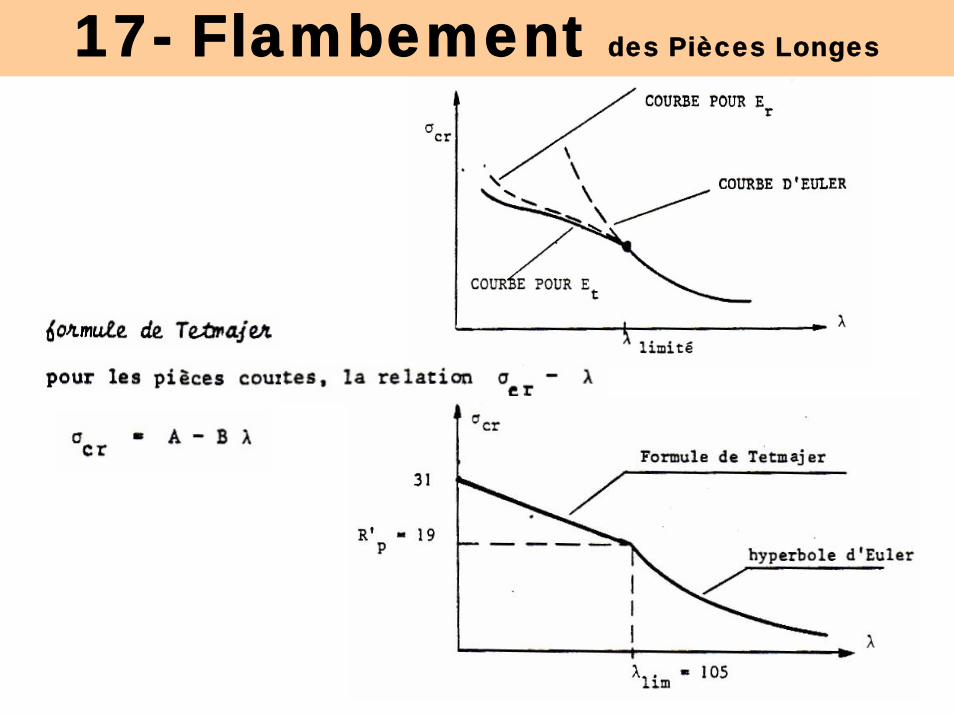
17- Flambement des Pièces Longes
17.1- Compression excentrée d'une tige droite tenant compte du déplacement du point d'application de la charge
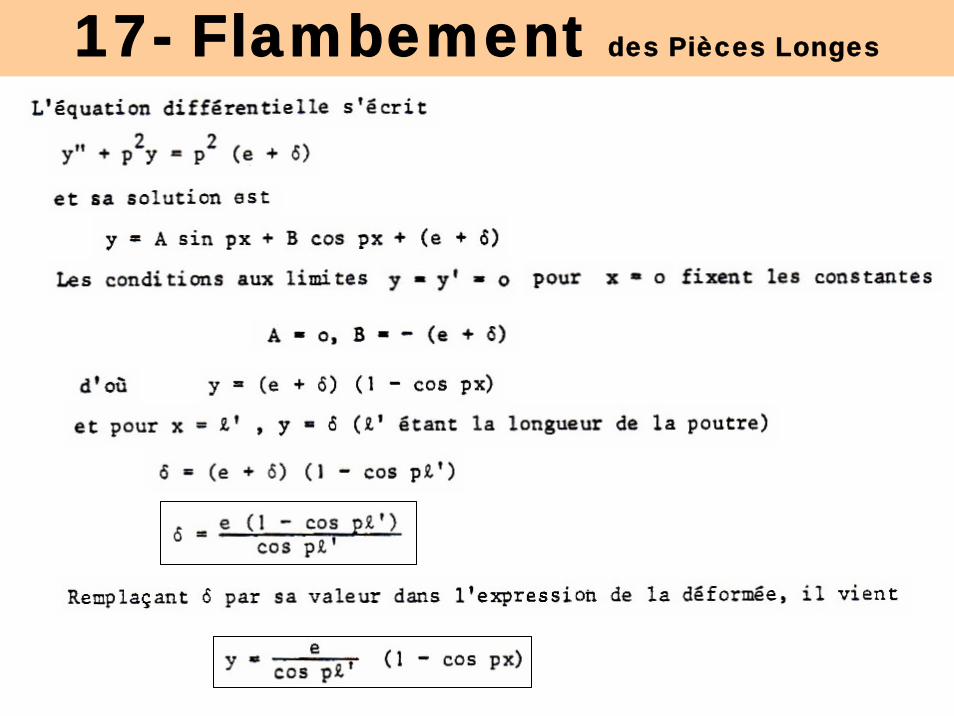
17- Flambement des Pièces Longes
17- Flambement des Pièces Longes
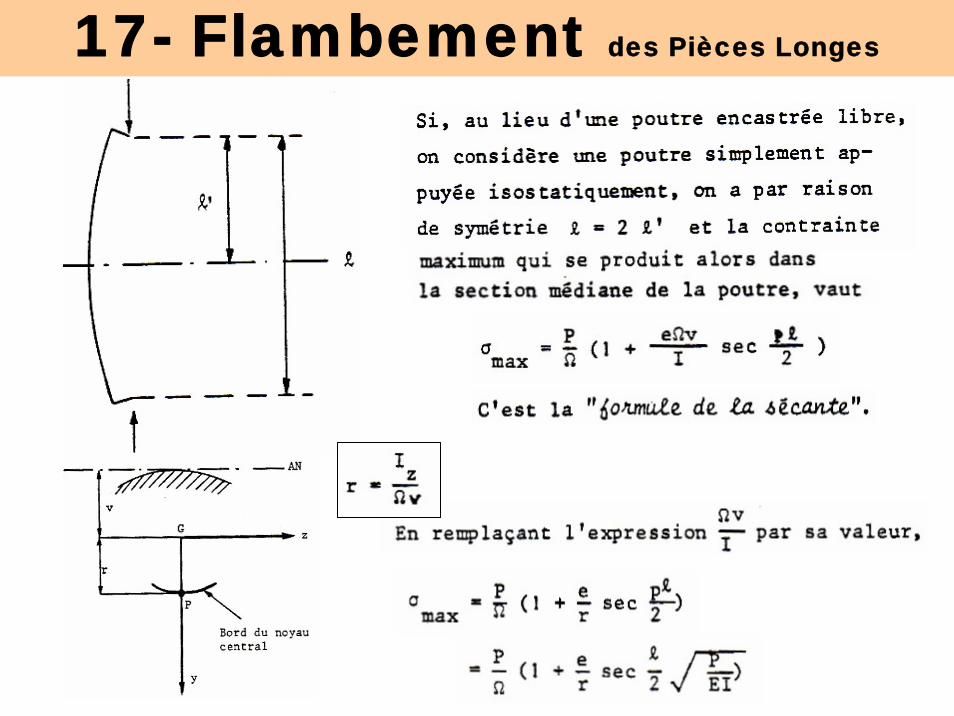
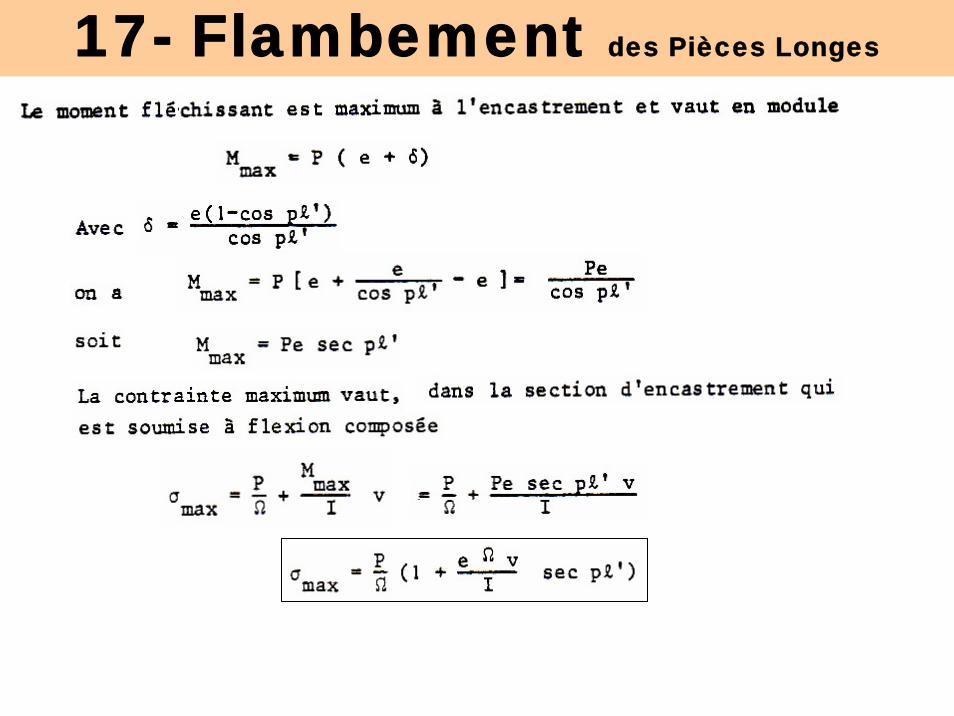
17- Flambement des Pièces Longes
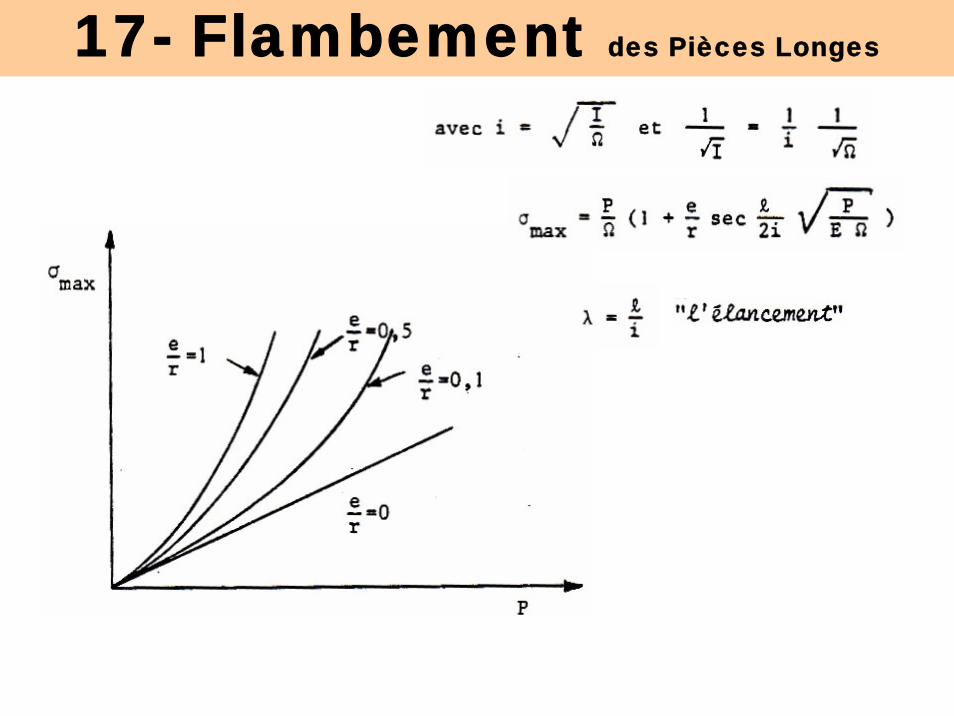
17- Flambement des Pièces Longes
17- Flambement des Pièces Longes
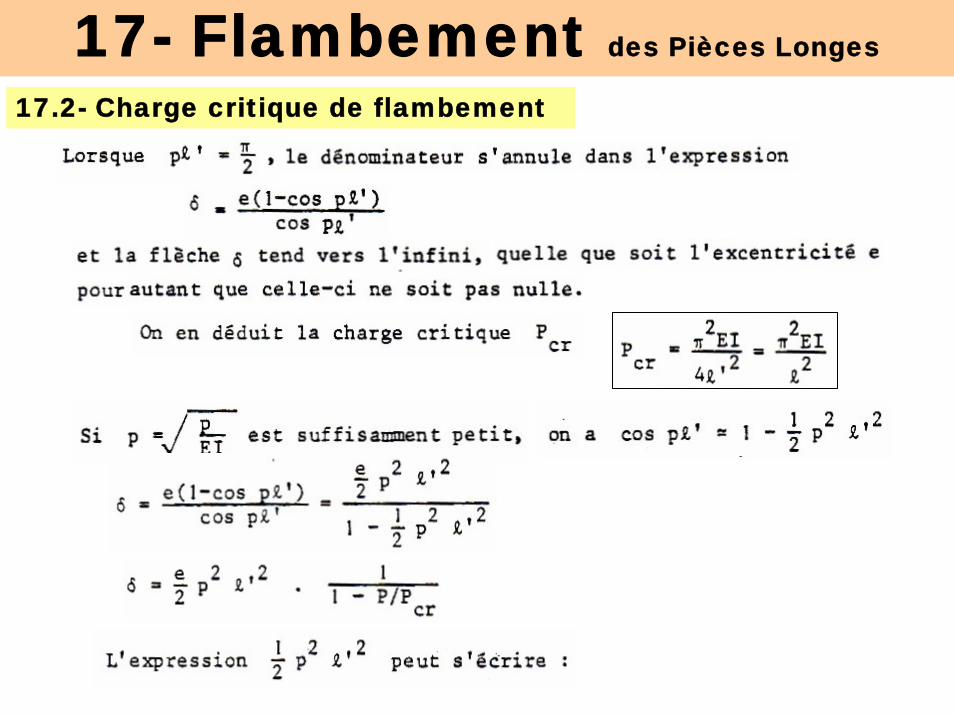
17.2- Charge critique de flambement
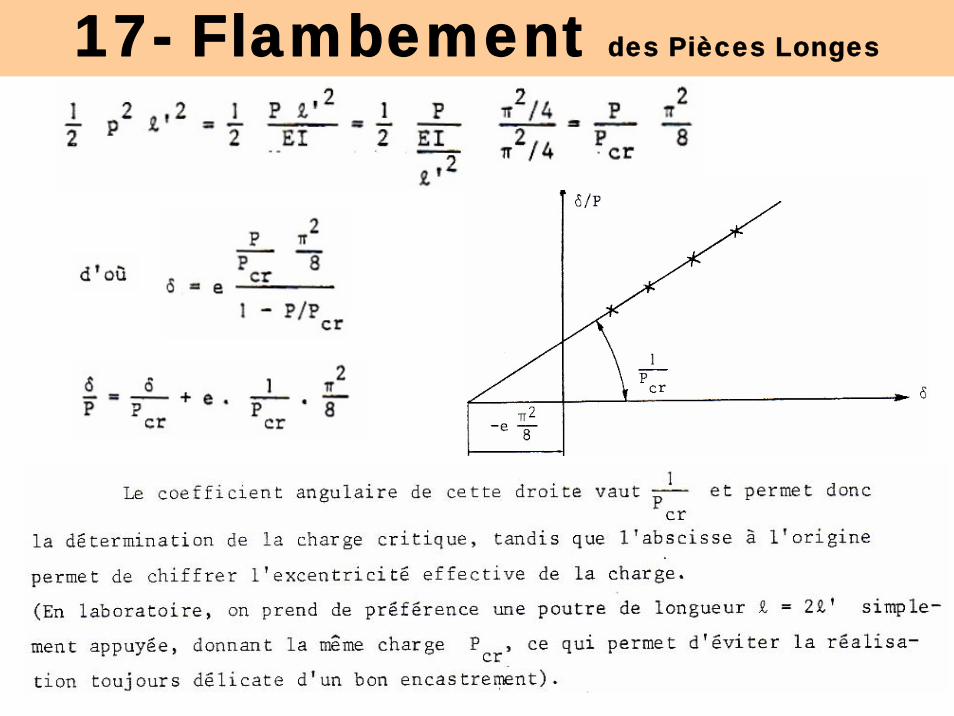
17- Flambement des Pièces Longes
17- Flambement des Pièces Longes
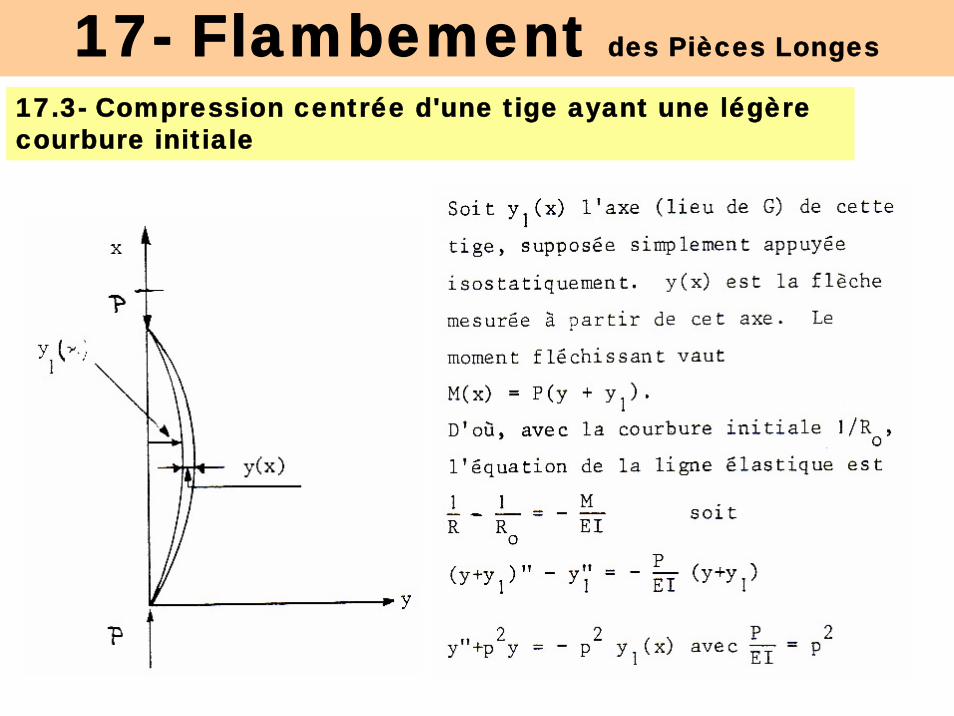
17.3- Compression centrée d'une tige ayant une légère courbure initiale
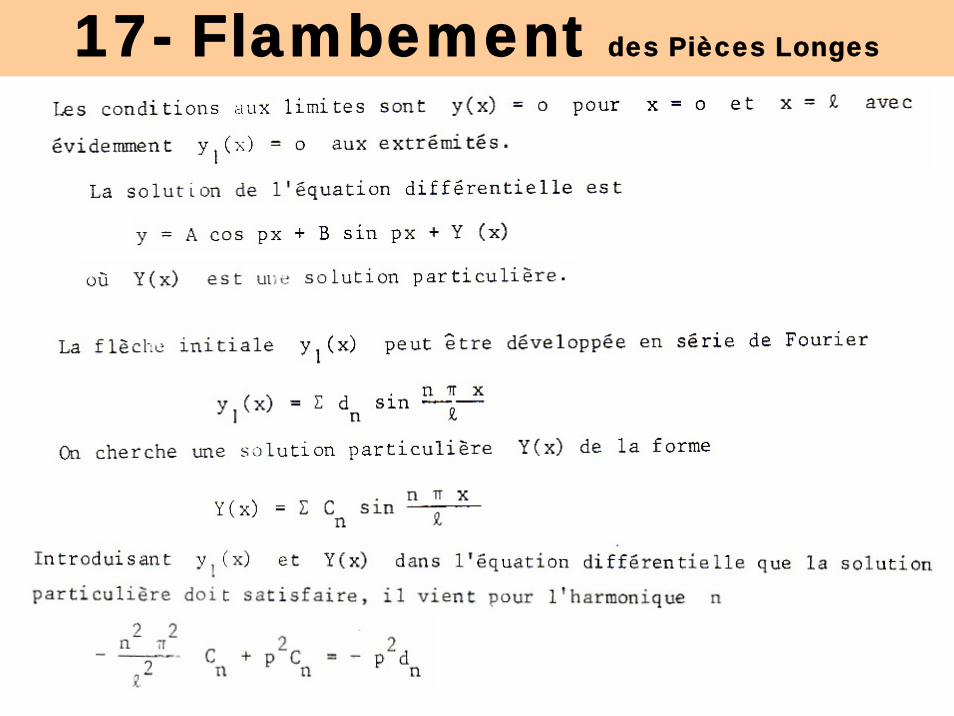
17- Flambement des Pièces Longes
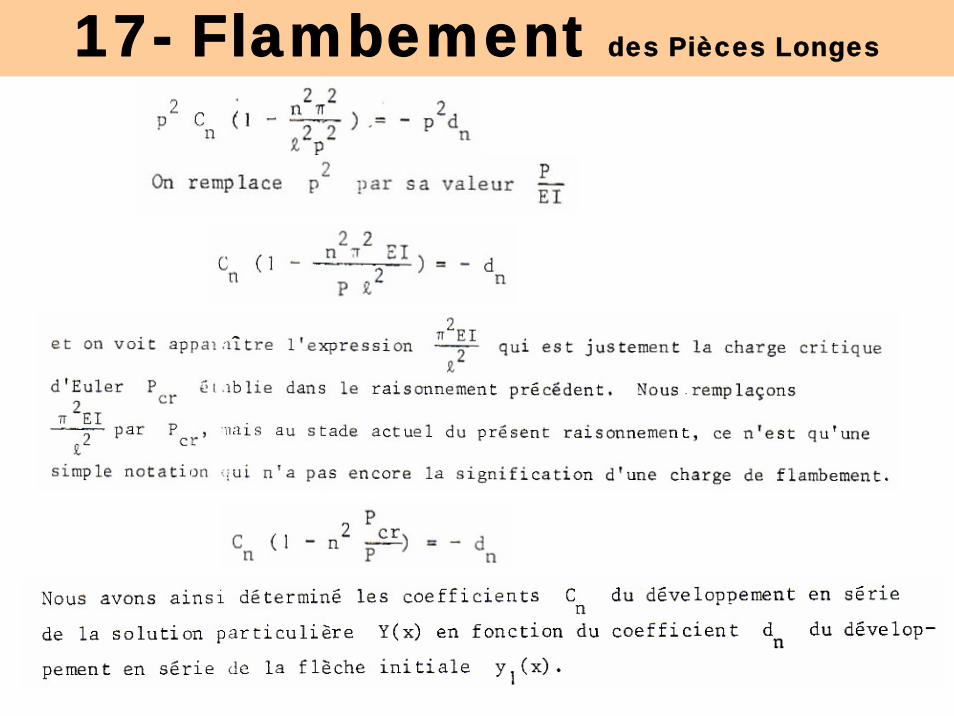
17- Flambement des Pièces Longes
17- Flambement des Pièces Longes
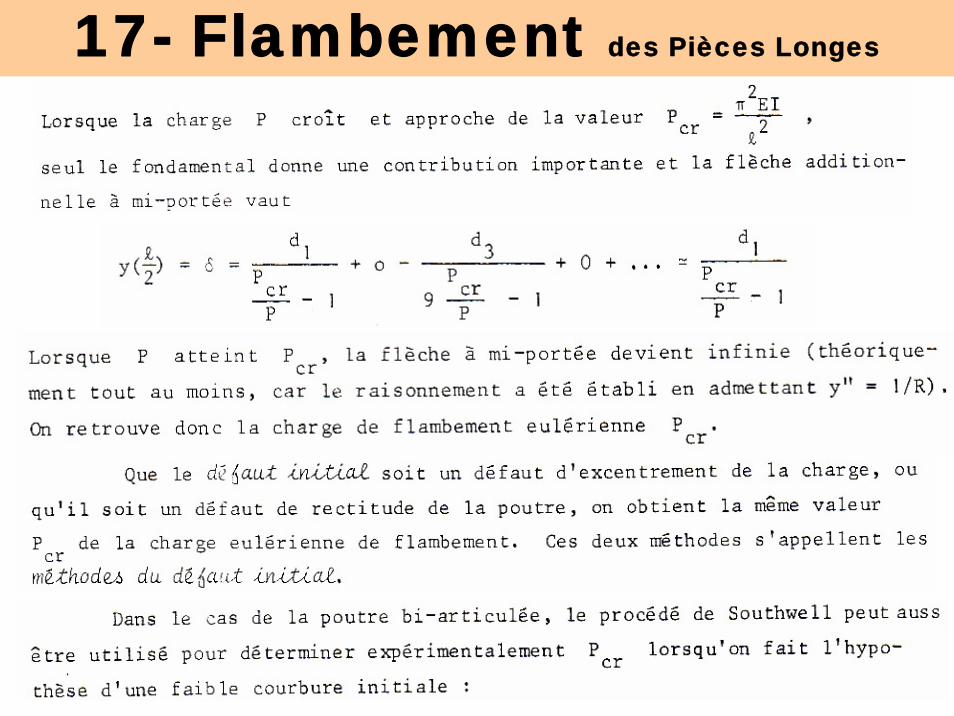
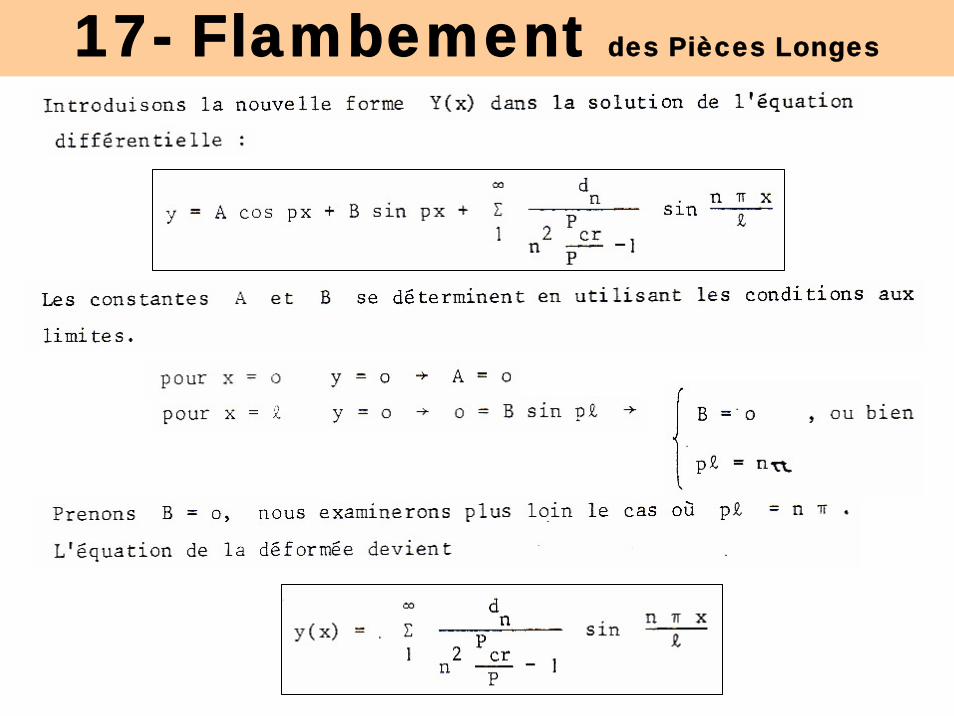
17- Flambement des Pièces Longes
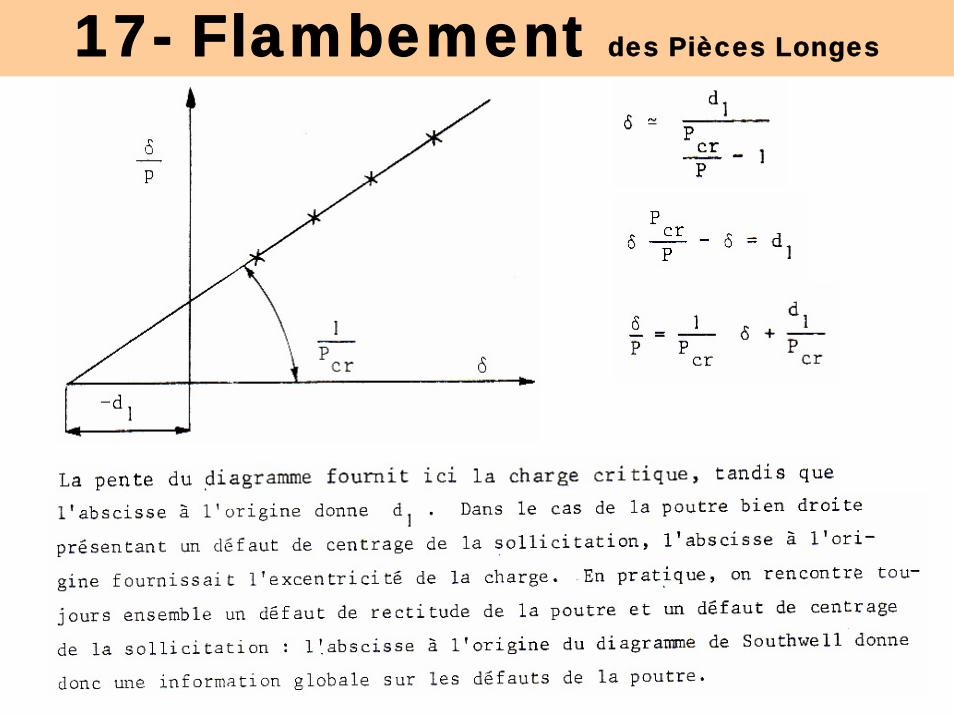
17- Flambement des Pièces Longes
17- Flambement des Pièces Longes
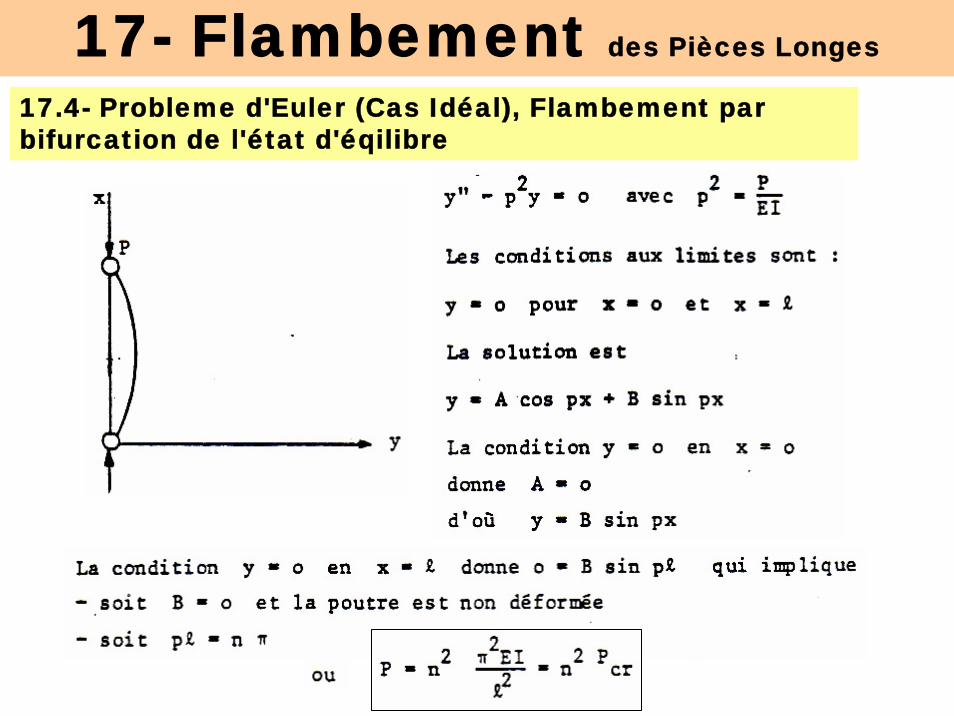
17.4- Probleme d'Euler (Cas Idéal), Flambement par bifurcation de l'état d'éqilibre
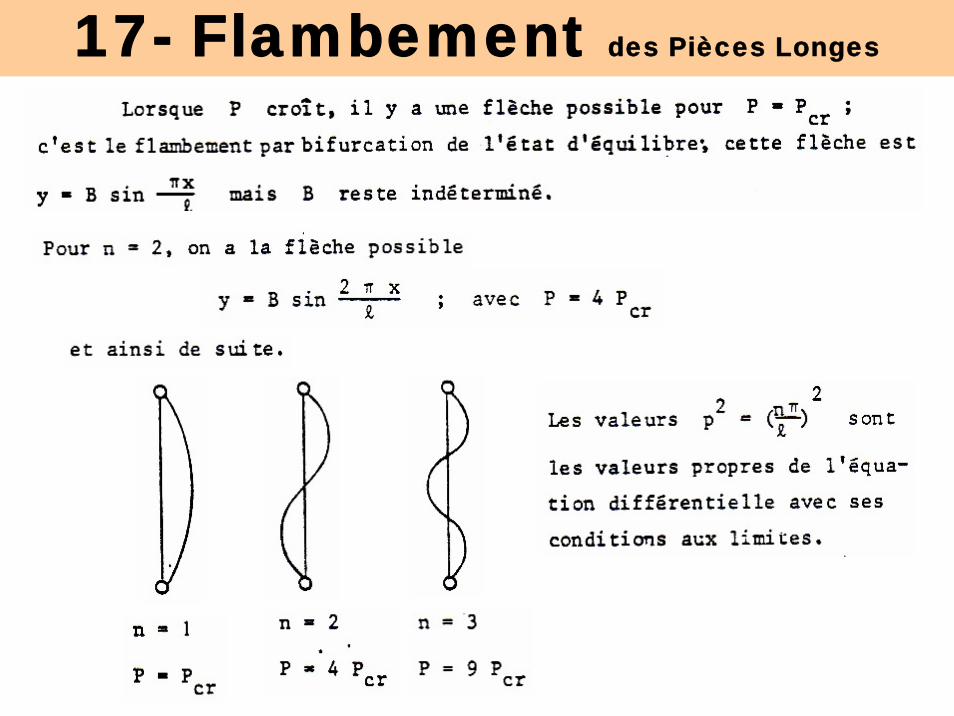
17- Flambement des Pièces Longes
17- Flambement des Pièces Longes
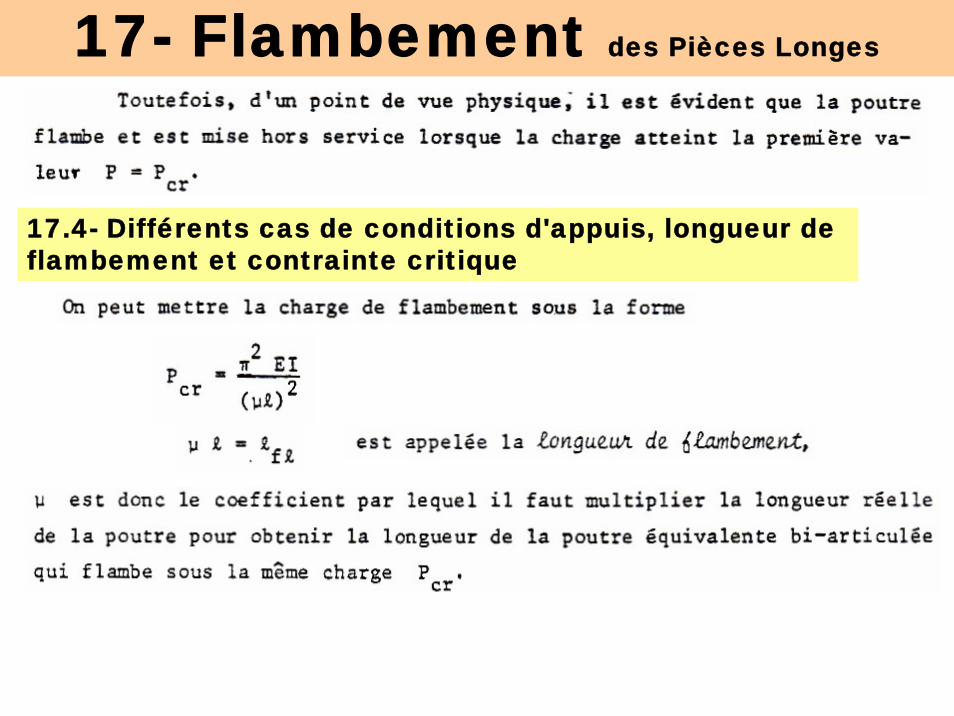
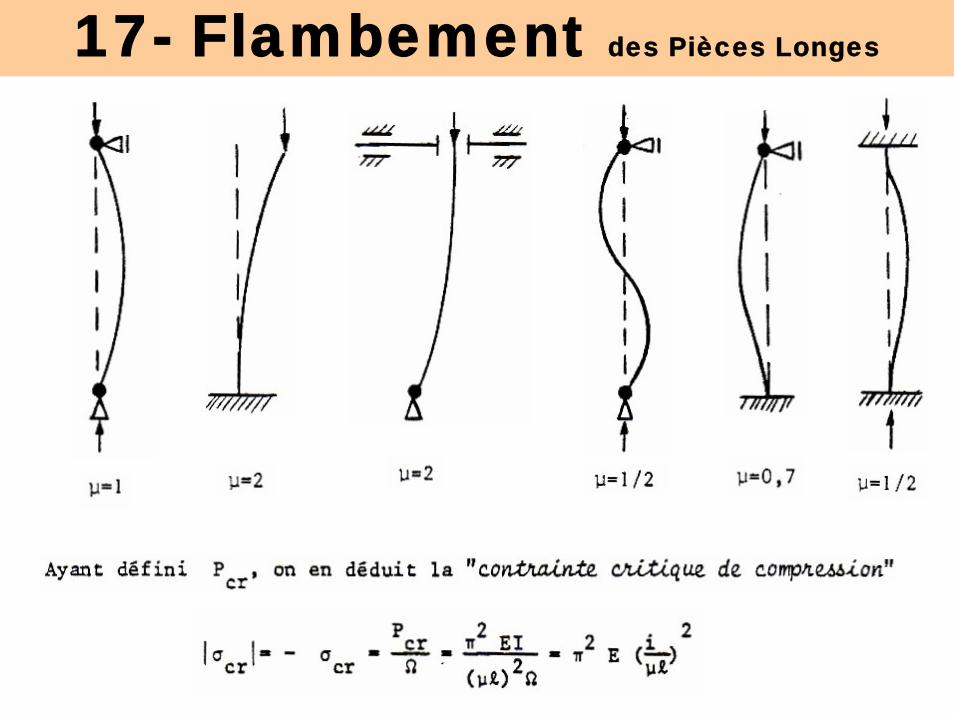
17.4- Différents cas de conditions d'appuis, longueur de flambement et contrainte critique
17- Flambement des Pièces Longes
17- Flambement des Pièces Longes
17- Flambement des Pièces Longes
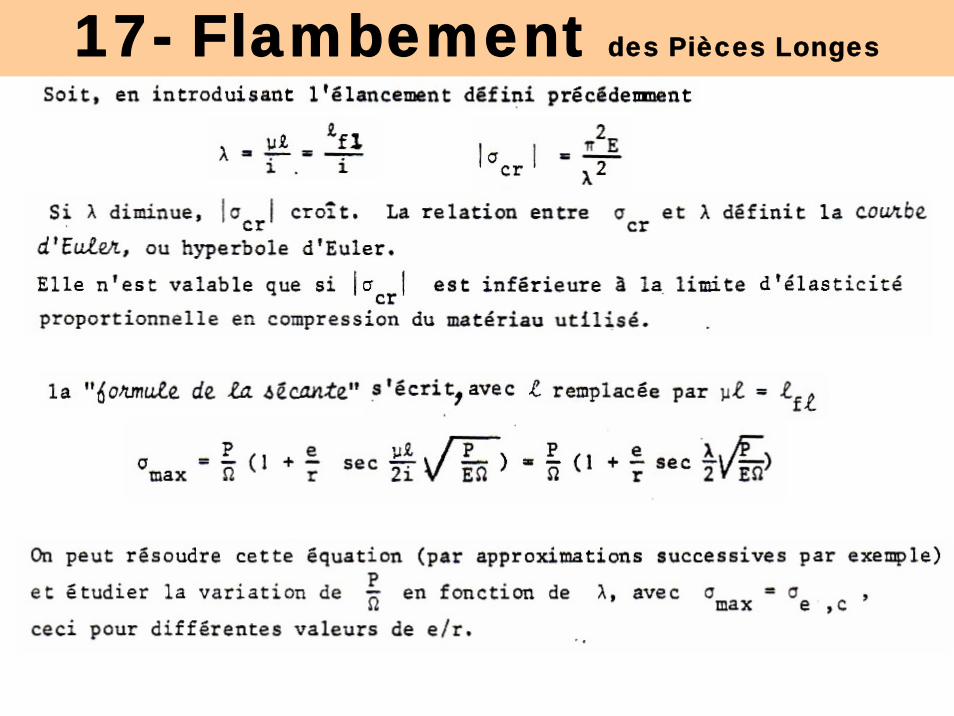
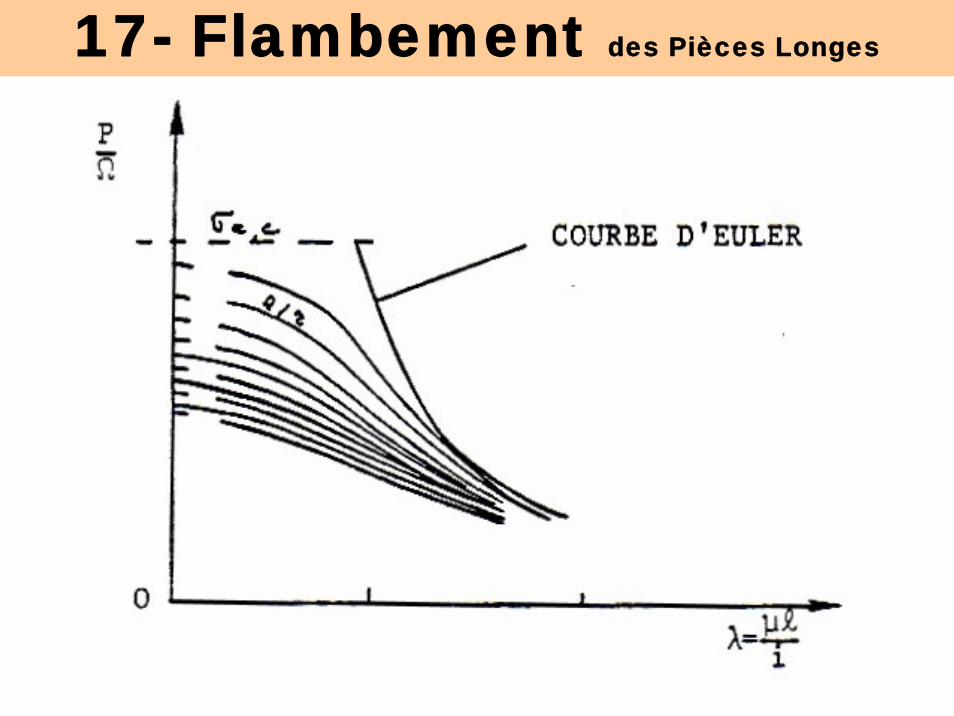
17- Flambement des Pièces Longes
17- Flambement des Pièces Longes
17- Flambement des Pièces Longes
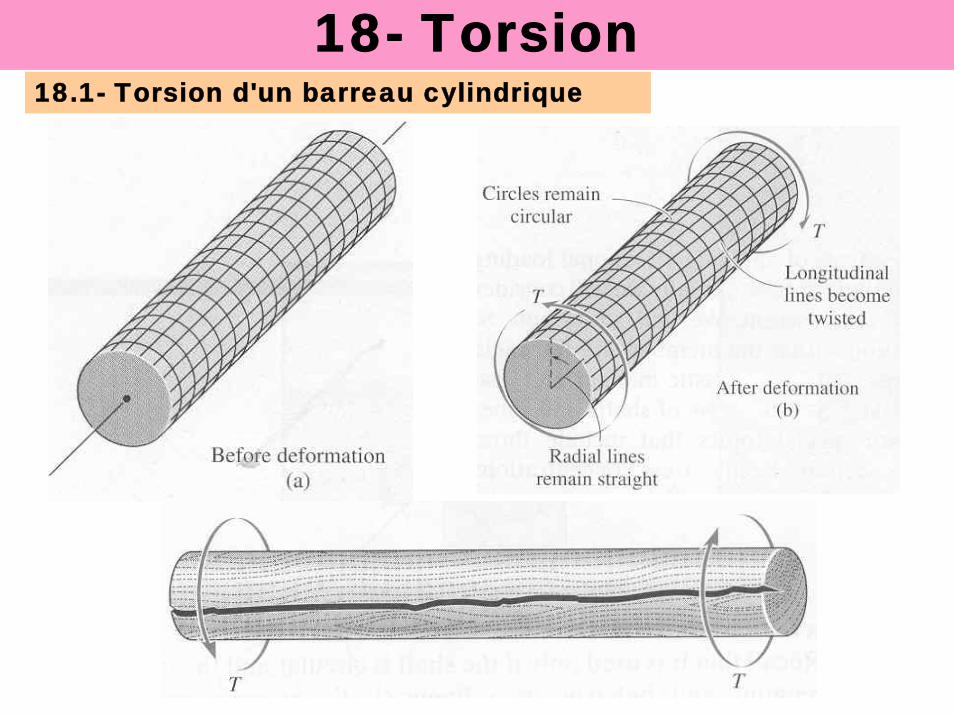
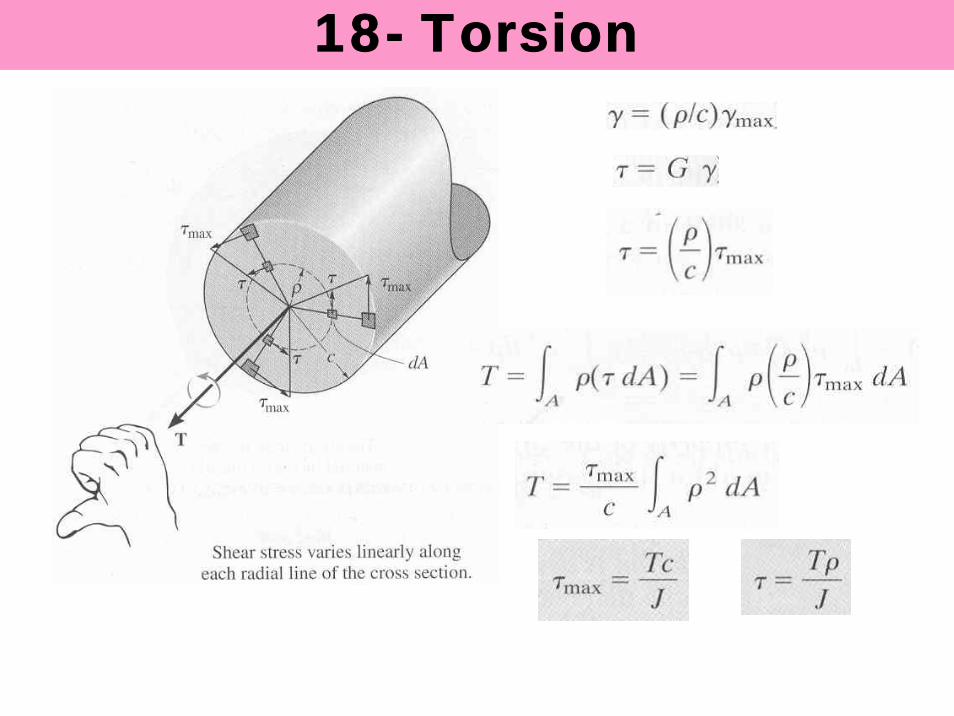
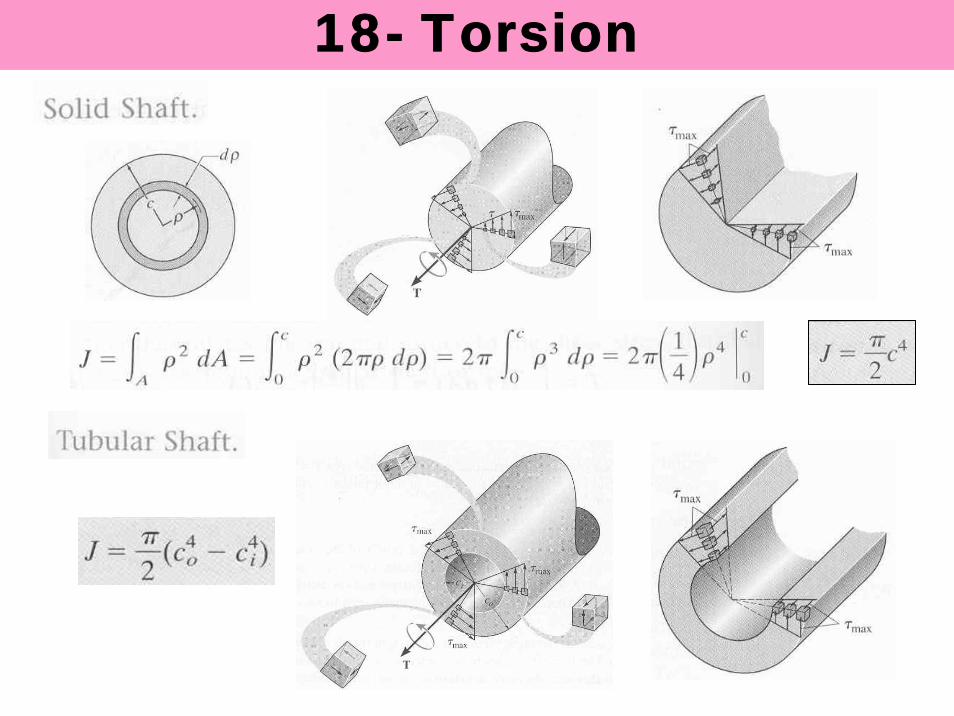
18- Torsion18.1- Torsion d'un barreau cylindrique
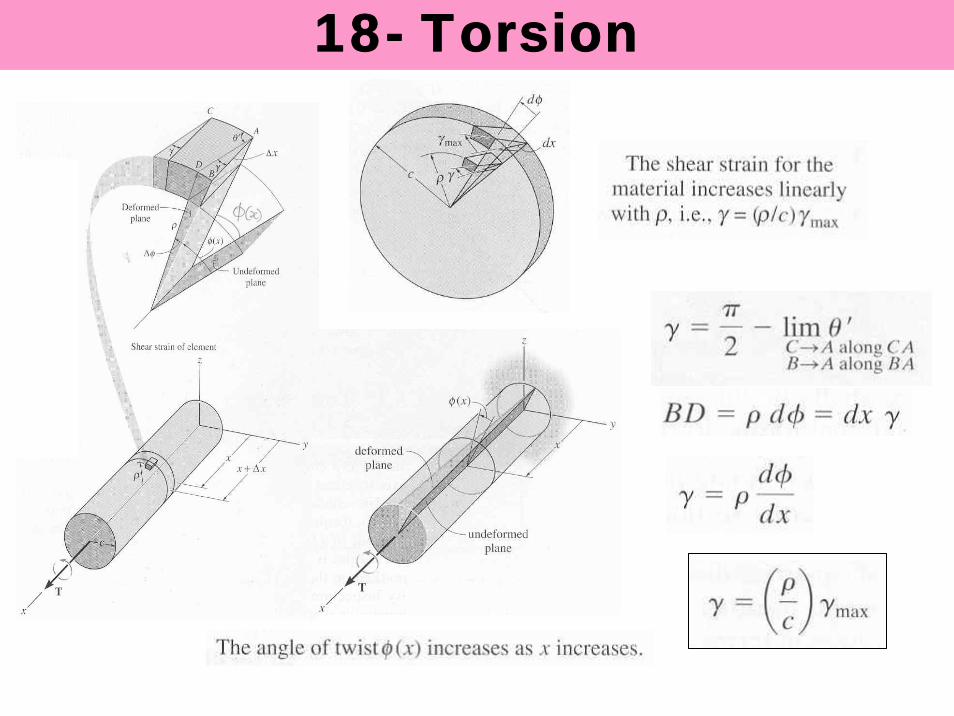
18- Torsion
18- Torsion
18- Torsion
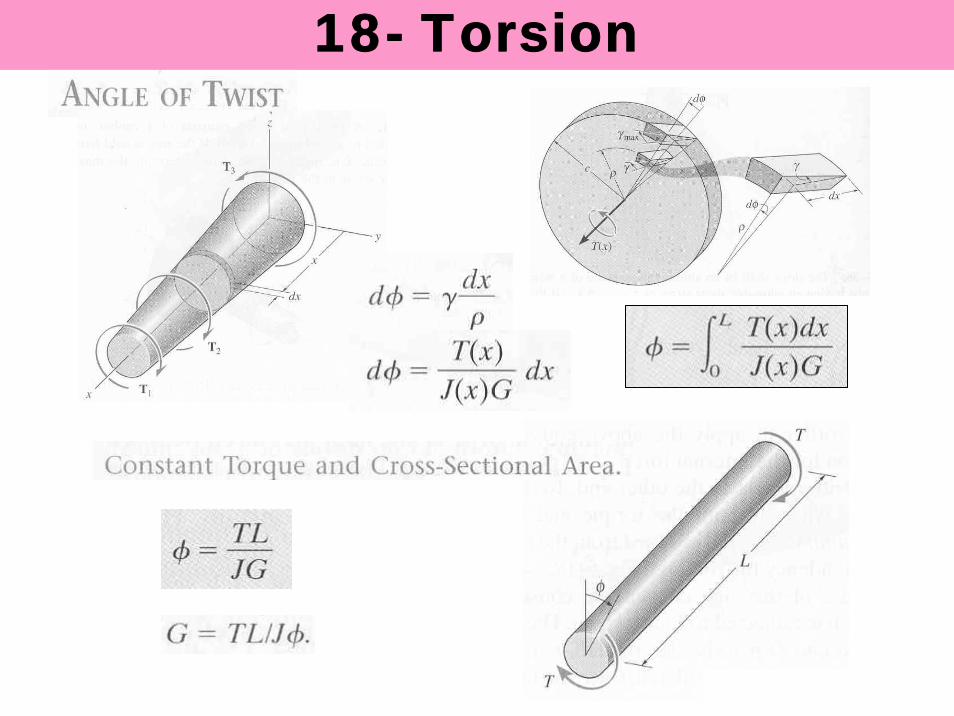
18- Torsion
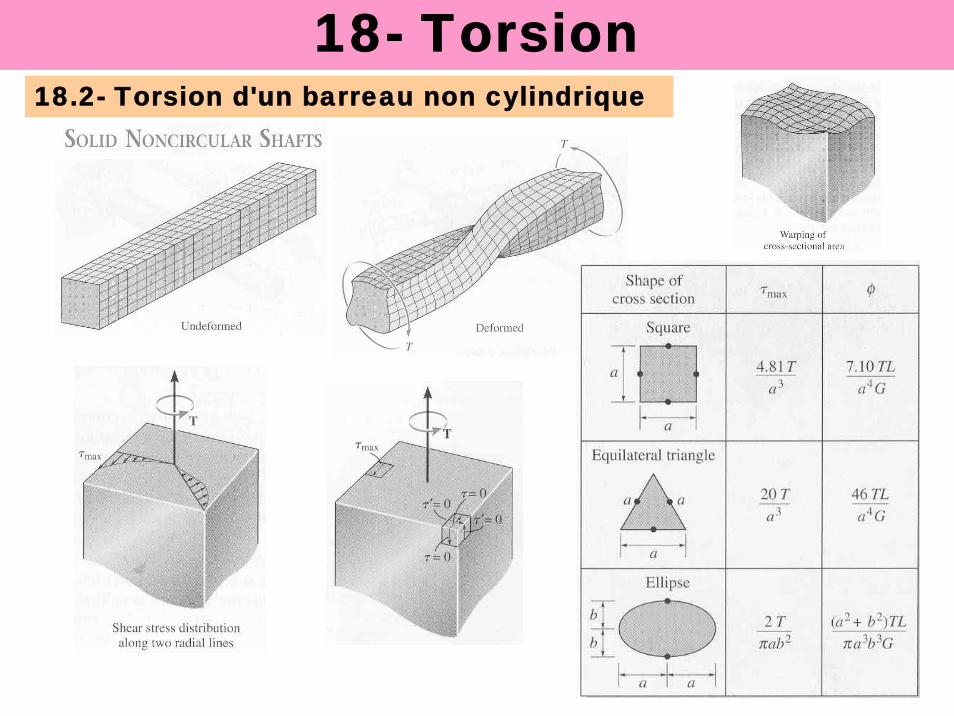
18- Torsion18.2- Torsion d'un barreau non cylindrique
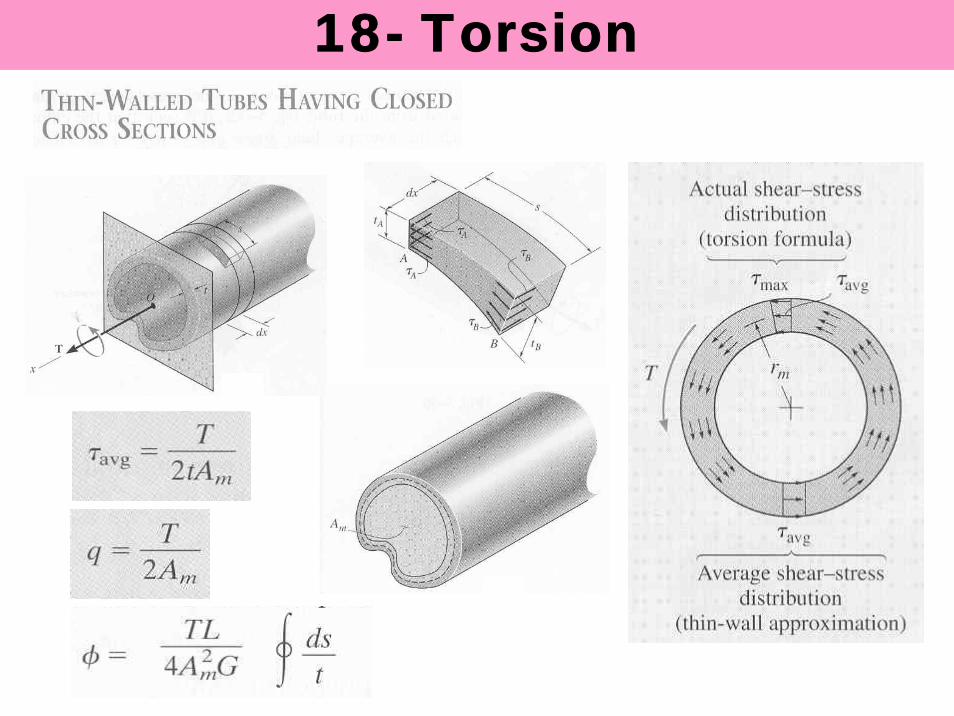
18- Torsion
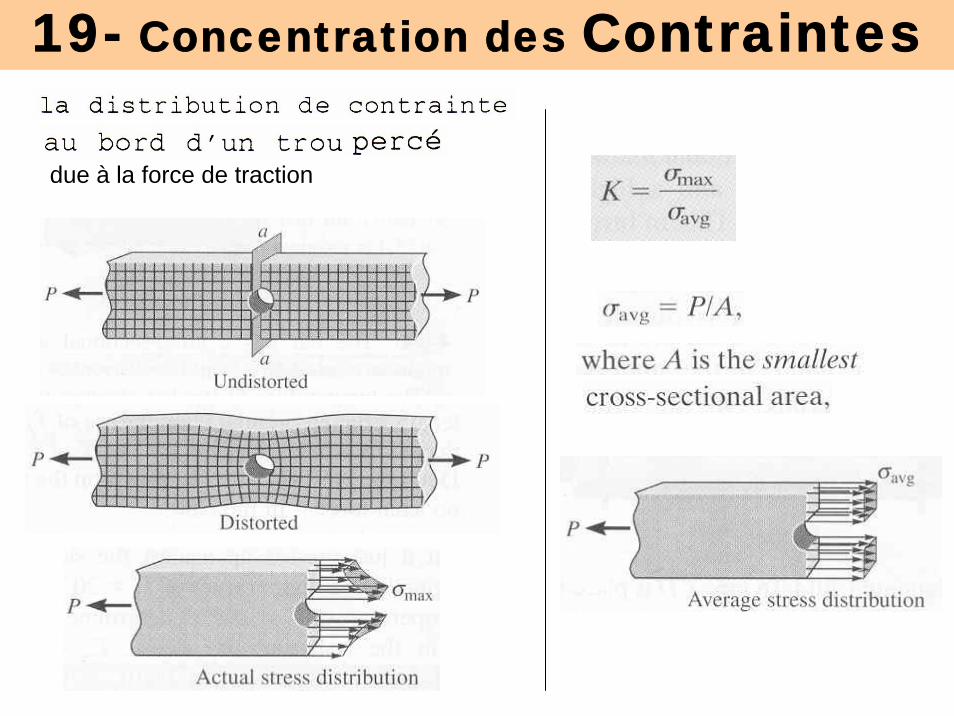
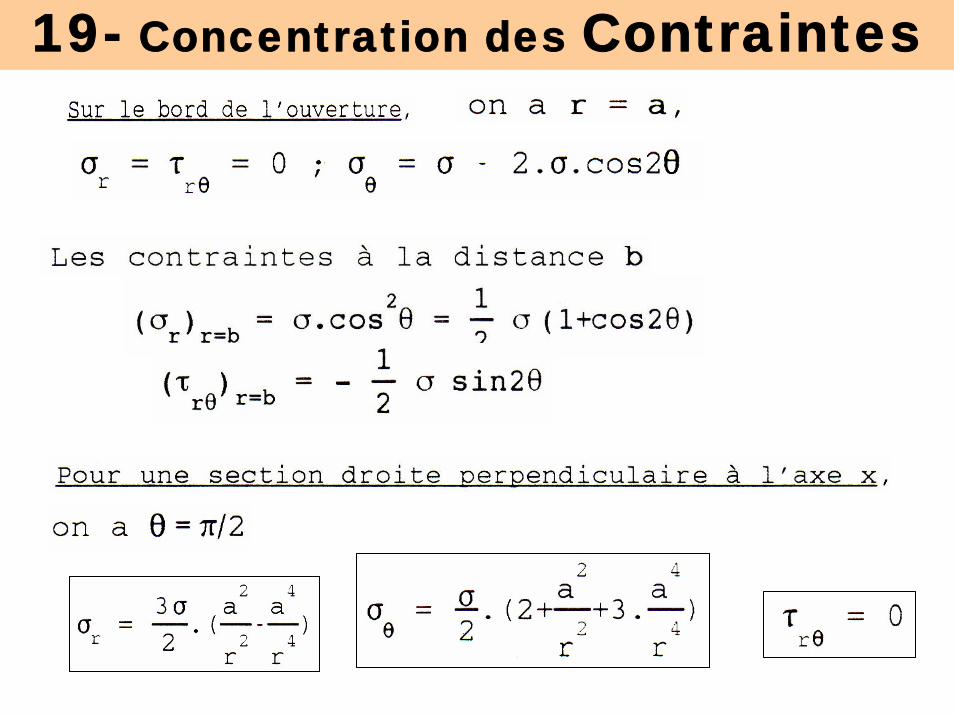
19- Concentration des Contraintes
due à la force de traction
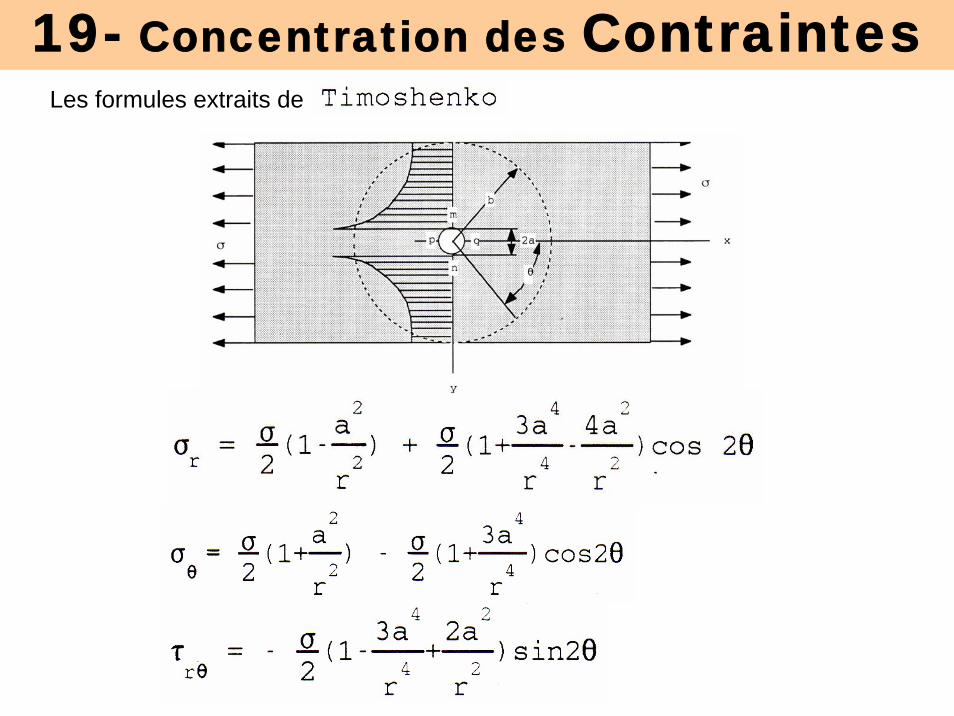
19- Concentration des ContraintesLes formules extraits de
19- Concentration des Contraintes
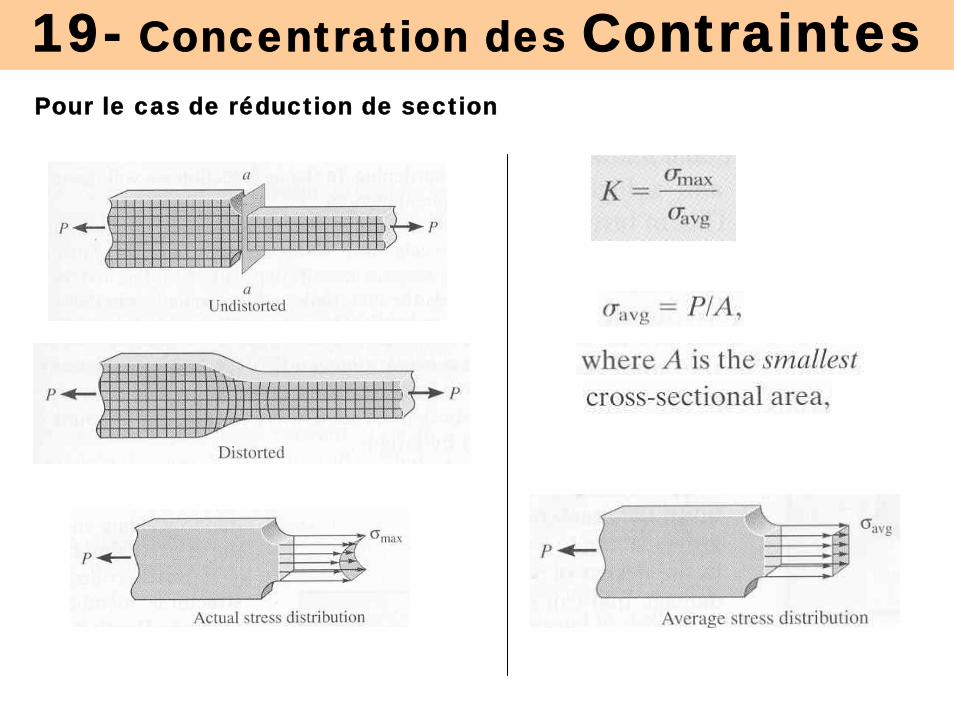
19- Concentration des ContraintesPour le cas de réduction de section
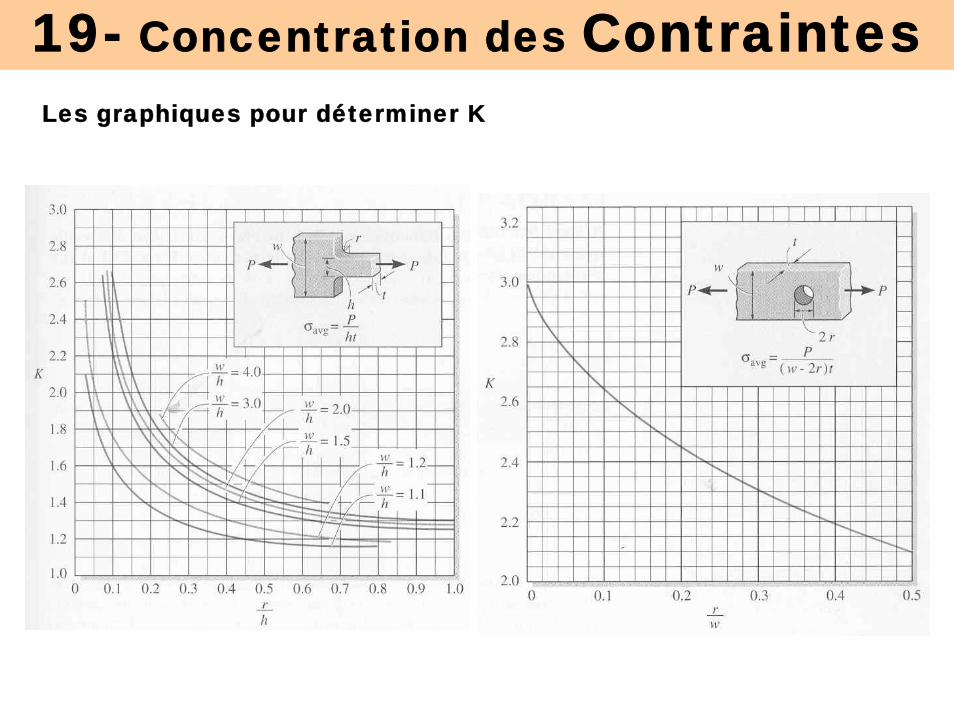
19- Concentration des ContraintesLes graphiques pour déterminer K
19- Concentration des Contraintes
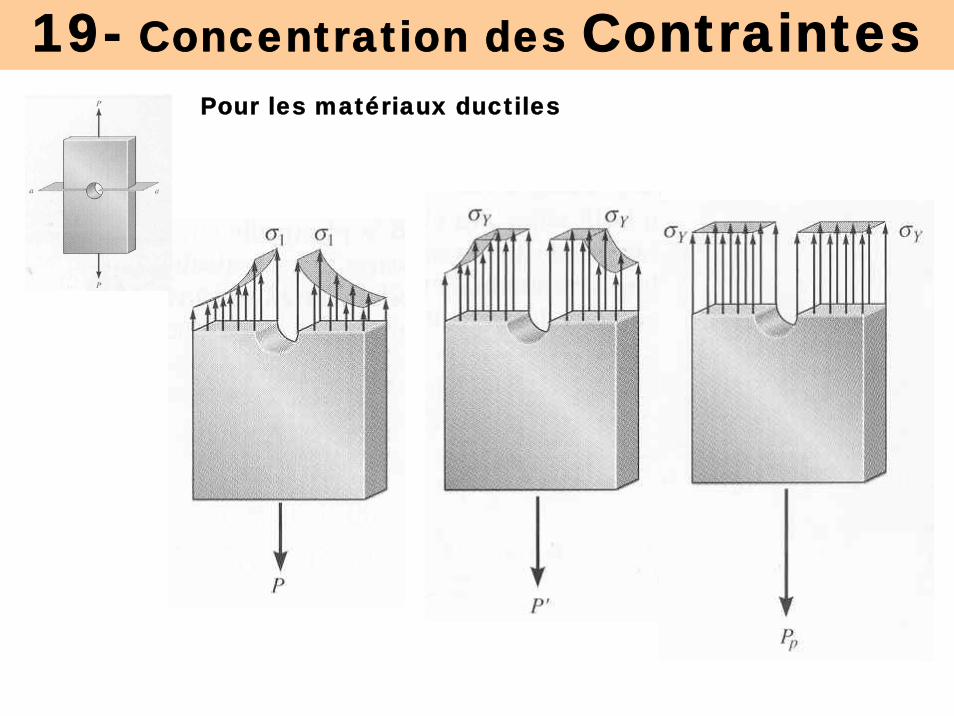
19- Concentration des ContraintesPour les matériaux ductiles
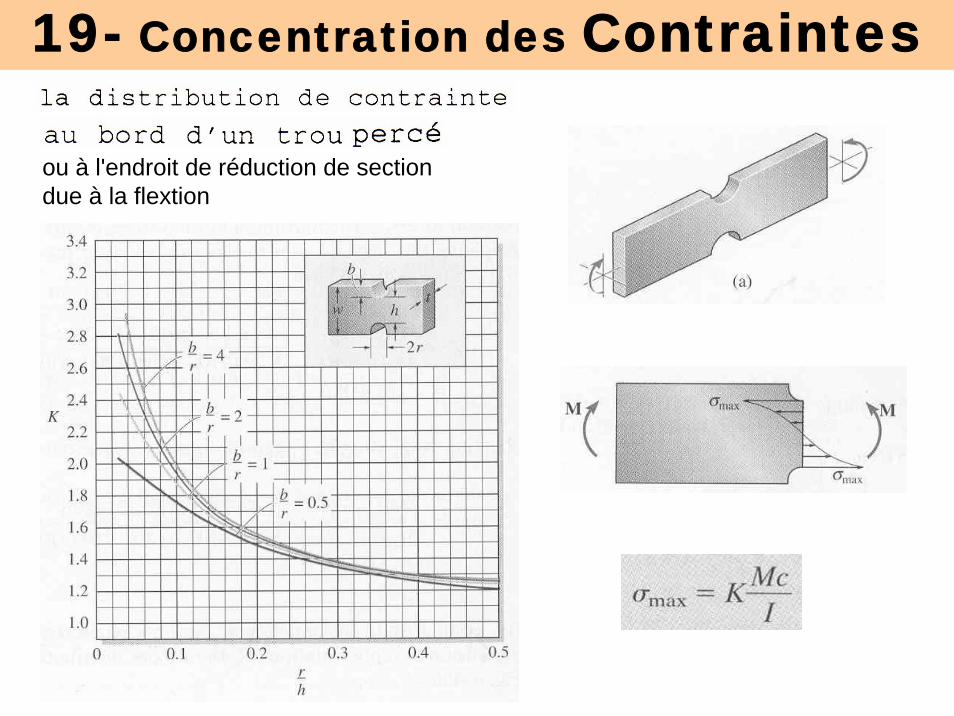
19- Concentration des Contraintes
ou à l'endroit de réduction de section due à la flextion
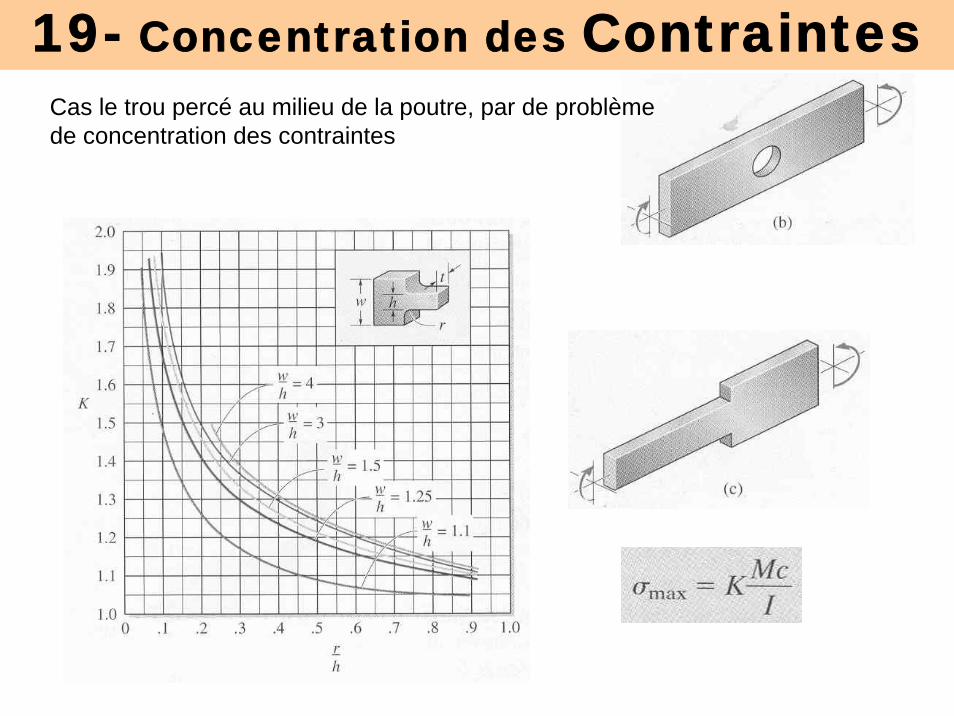
19- Concentration des ContraintesCas le trou percé au milieu de la poutre, par de problème de concentration des contraintes
19- Concentration des Contraintes
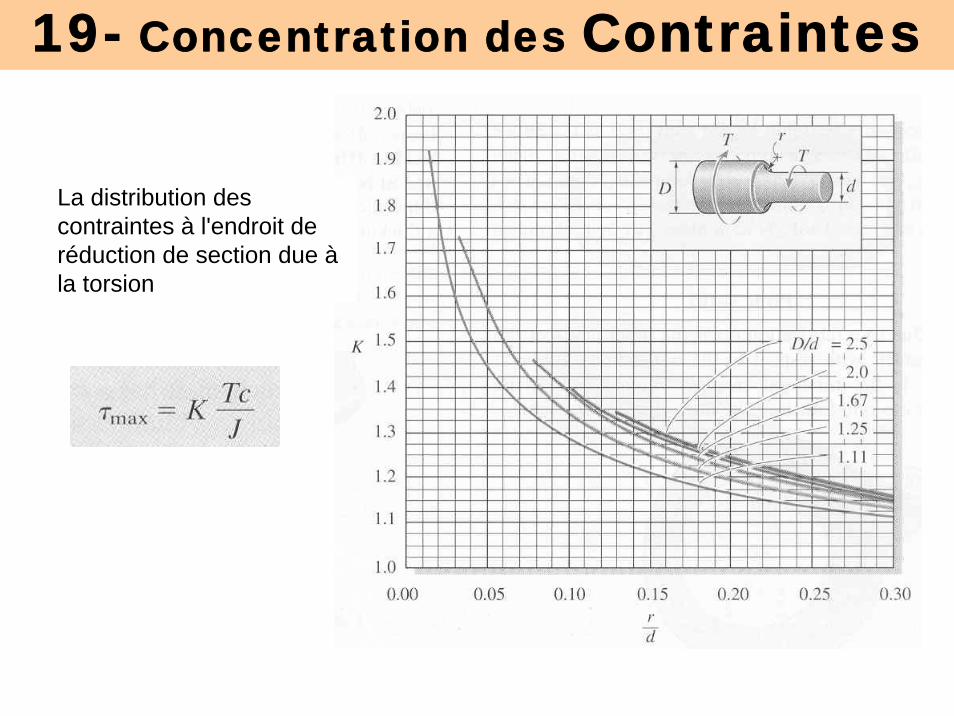
La distribution des contraintes à l'endroit de réduction de section due àla torsion
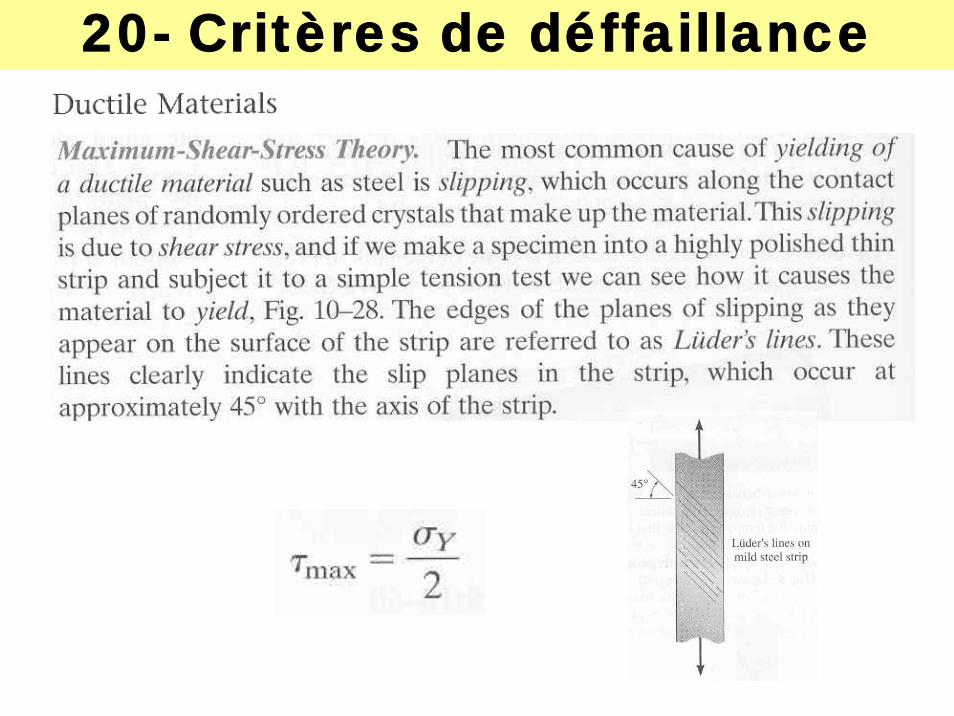
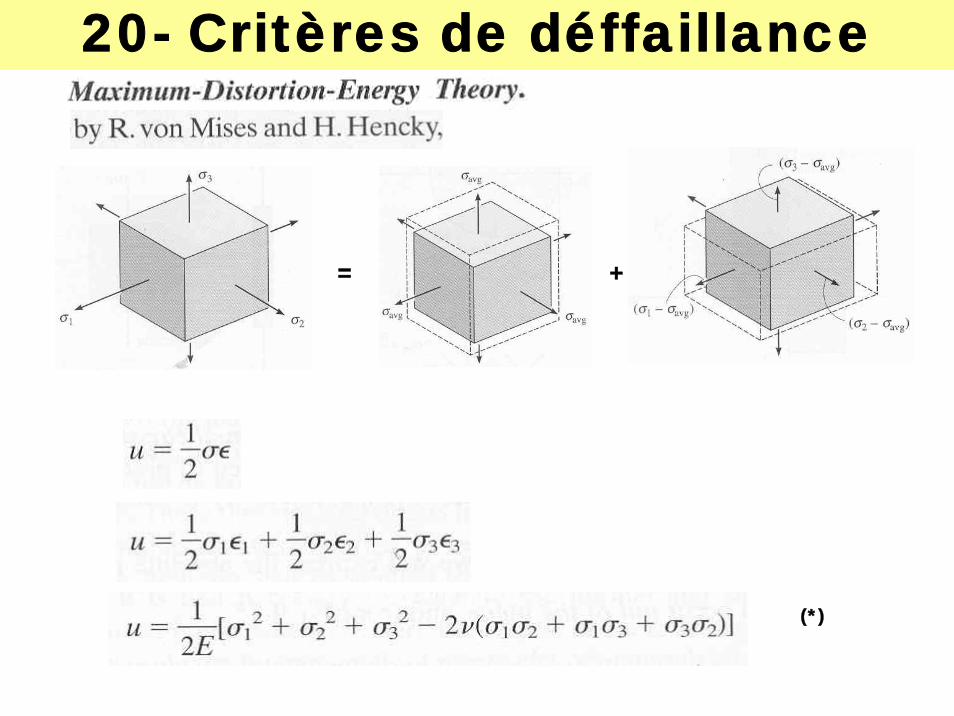
20- Critères de déffaillance
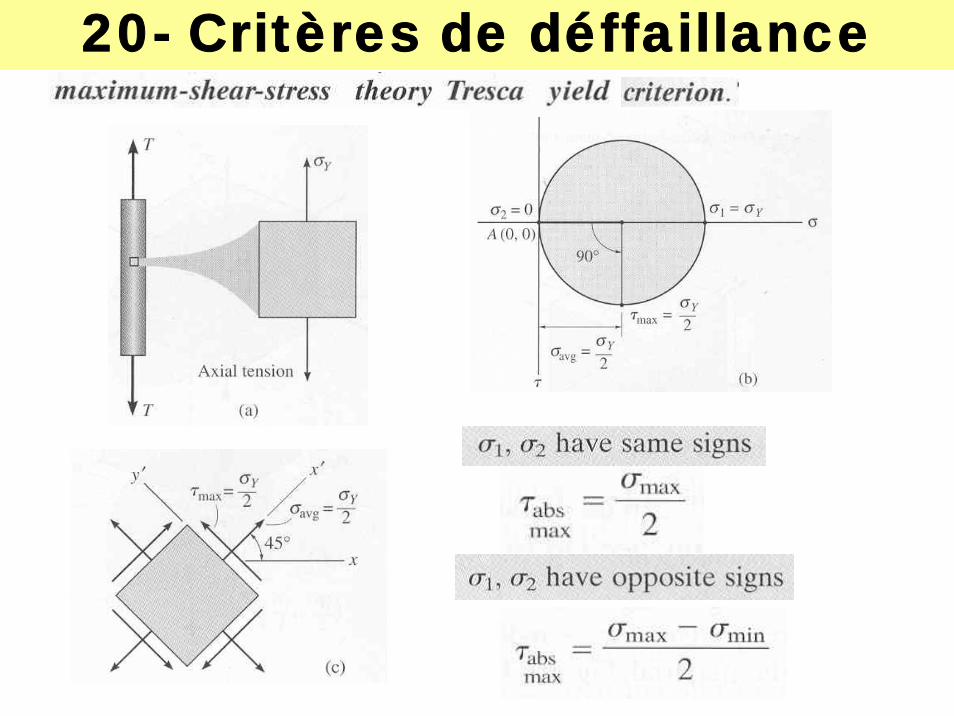
20- Critères de déffaillance
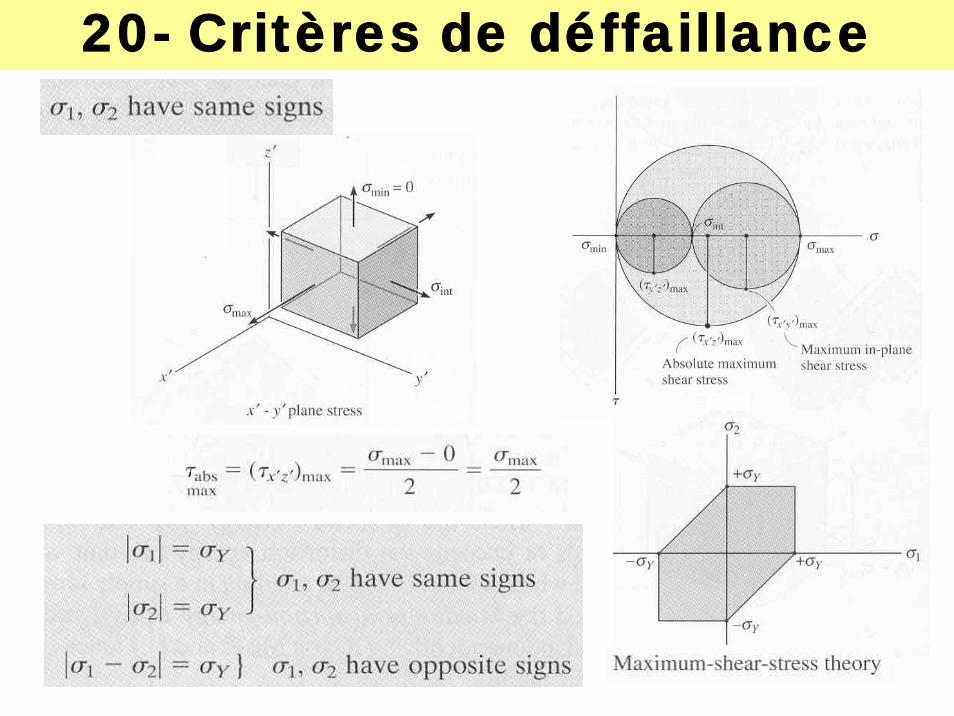
20- Critères de déffaillance
20- Critères de déffaillance
+=
(*)
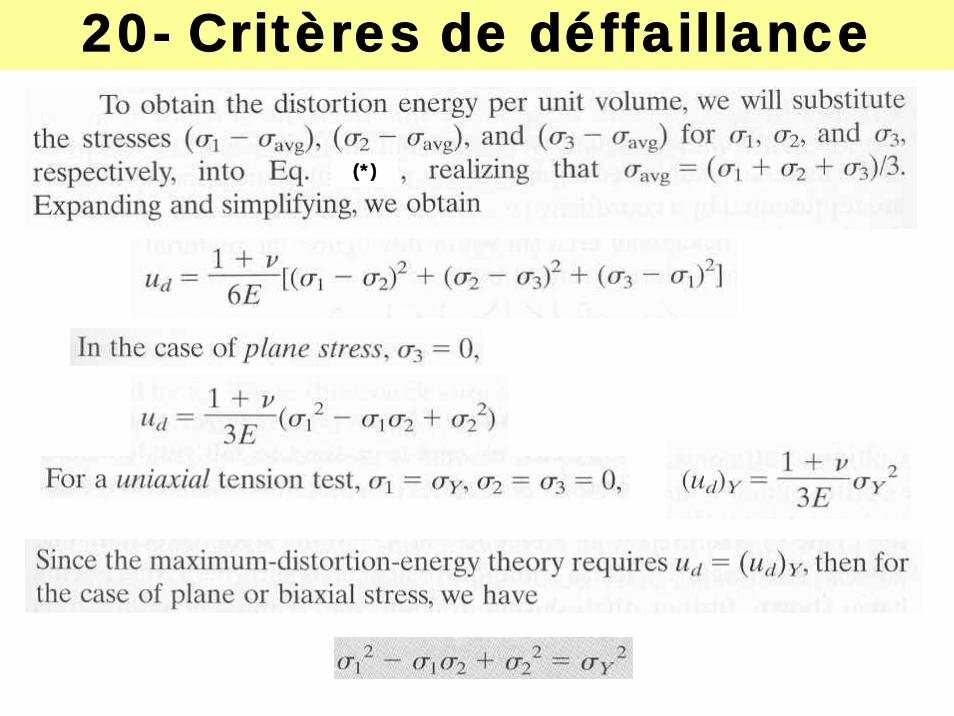
20- Critères de déffaillance
(*)
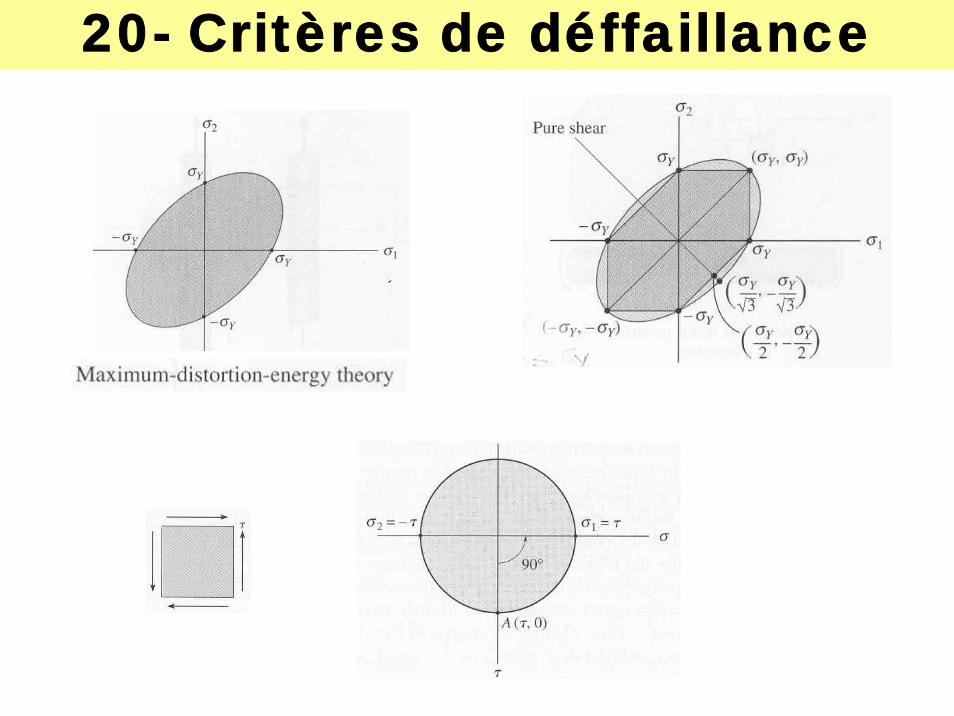
20- Critères de déffaillance
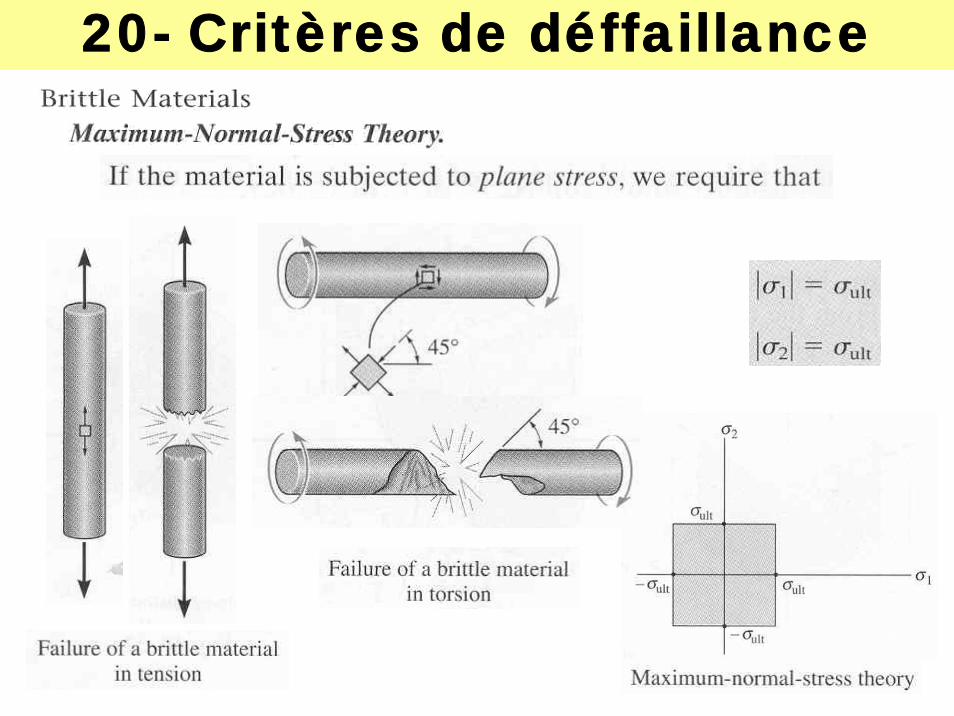
20- Critères de déffaillance
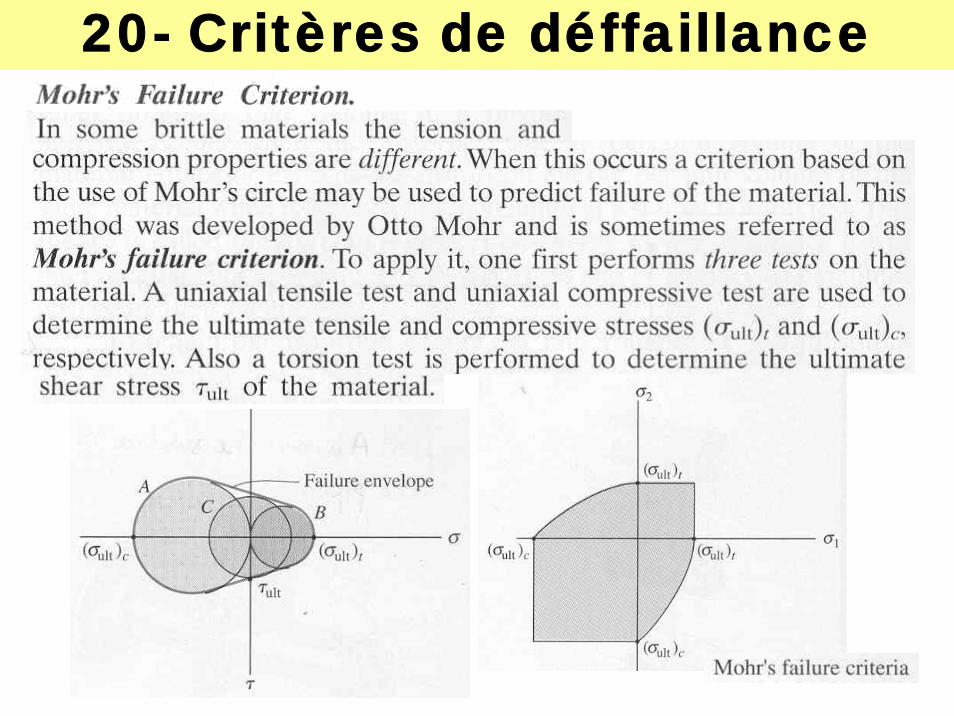
20- Critères de déffaillance