retireti global position system global position system...
TRANSCRIPT

Corso C111.01 - GeomaticaCorso C111.01 Geomatica
RetiReti Global Position System Global Position System (GPS) per(GPS) per ilil controllocontrollo didi(GPS) per (GPS) per ilil controllocontrollo didi
deformazionideformazioni localilocali
Massimiliano Cannata

IndiceIndice
• Parte I:Parte I:– teoria delle misure GPS
• Parte II:– aspetti pratici delle misure GPS
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

Sistema GPSSistema GPS
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
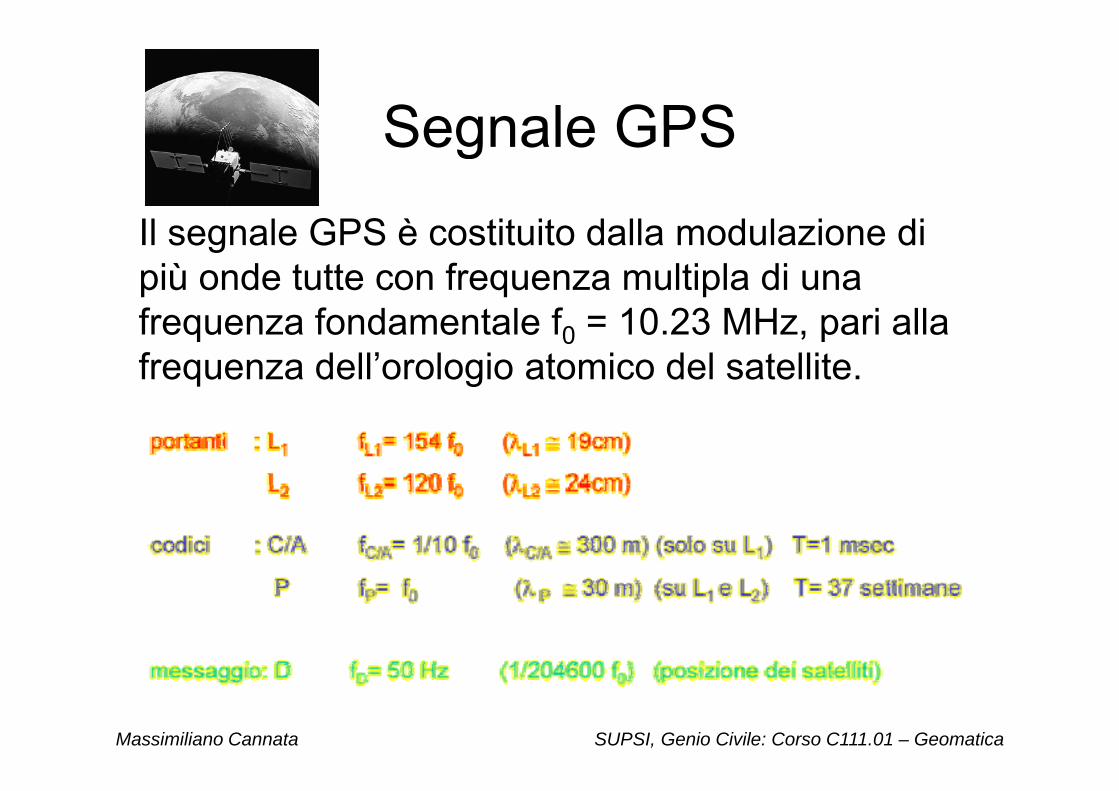
Segnale GPSSegnale GPS
Il segnale GPS è costituito dalla modulazione di più onde tutte con frequenza multipla di una frequenza fondamentale f0 = 10.23 MHz, pari alla frequenza dell’orologio atomico del satellite.
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

Modulazione delle ondeModulazione delle onde
((D+C/A)*L1)*P
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
(D+P)*L2

Modulazione delle ondeModulazione delle onde
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

Messaggio navigazionale DMessaggio navigazionale D
1 - Parametri per la correzione degli orologicorrezione degli orologi
2,3 - Effemeridi predette (coeff Parametri di(coeff. Parametri di Keplero)
4 Modello ionosferico4 - Modello ionosferico
5 - Almanacco dei satelliti (aiuta tracciamento)(aiuta tracciamento)
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

Tipi di misureTipi di misureMISURE DI PSEUDO RANGEMISURE DI PSEUDO RANGE•• MISURE DI PSEUDO RANGEMISURE DI PSEUDO RANGE
– (precisioni poco elevate 20 )~ max 20 cm)
• Misuro il tempo di volo• Calcolo D = c·∆tCalcolo D c ∆t
•• MISURE DI FASEMISURE DI FASEMISURE DI FASEMISURE DI FASE– (precisioni più elevate
~ max 2 mm) max 2 mm)• Misuro il numero di cicli• Calcolo D = (φ·λ)/(2·π)
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

Misure di pseudo rangeMisure di pseudo range
• Ricezione del segnale del satellite• Replica del segnaleReplica del segnale• Correlozione tra i due segnali e stima di ∆t
segnale
∆t
replica∆t
( ) ( ) ( )misuratonoto
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
( ) ( ) ( ) ( )222p
sp
sp
ssp ZZYYXXTct −+−+−=Δ⋅=ρ
notoincognito

Misure di pseudo rangeMisure di pseudo range3 incognite => 3 equazioni3 incognite > 3 equazioni
=> 3 satellitiEsistono diverse fonti sistematiche di errore che si traducono in errori di misura di posizione del punto:
- errori di sfasamento degli orologi:10 100~ 10-100m
- ritardi di propagazione del segnale nella troposfera (0 15 km) e ionosfera (50
WGS84
nella troposfera (0-15 km) e ionosfera (50-500 km):
~ 20-60m
- errori di posizione del satellite:~ 20-40m
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

Sfasamento degli orologiSfasamento degli orologi
Se gli orologi del satellite e del ricevitore non sono sincroni la misura del tempo di viaggio p ggdel segnale è affetta da errore.
(1 nanosecondo (10-9 sec) = 30 cm in distanza!)( ( ) )
∆t (misurato) = ∆t (vero) + dτ (sfasamento)∆t (misurato) = ∆t (vero) + dτ (sfasamento)
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

Ritardi di propagazioneRitardi di propagazione
Poiché l’onda non viaggia nel vuoto è soggetta a fenomeni di rifrazione e ggdiffrazione ed il percorso non è lineare.Si misurano due ritardi:Si misurano due ritardi:
dionosfera – dtroposfera
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

Correzione degli erroriCorrezione degli errori
∆τ si stima come incognita osservando un 4° satellitedionosfera si stima modellizzandolod i ti d lli d ldtroposfera si stima modellizzandolo
( ) ( ) ( ) ( ) ( ) troposferaionosferaps
ps
pss
p ddcZZYYXXtctP ++Δ⋅+−+−+−=Δ⋅= τ222
misuratonotomodellato4 incognite => 4 equazioni
> 4 t lliti
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
incognito=> 4 satelliti
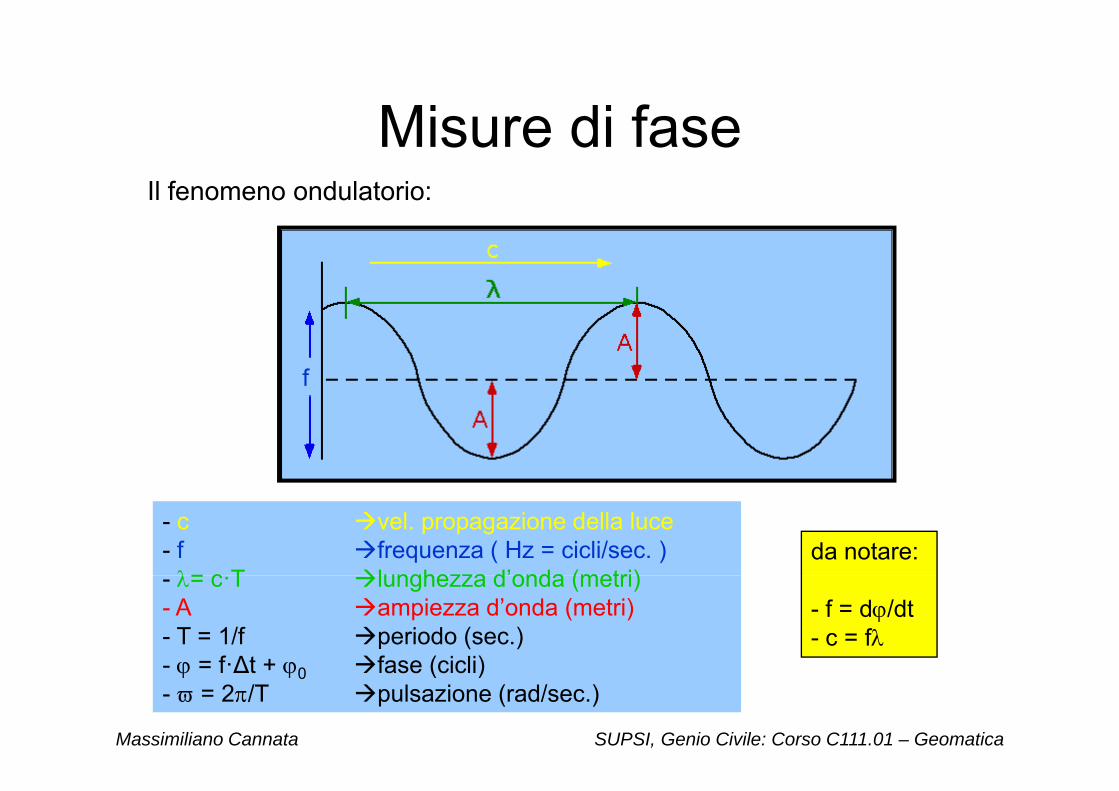
Misure di faseMisure di faseIl fenomeno ondulatorio:
f
- c vel. propagazione della luce- f frequenza ( Hz = cicli/sec. )λ= c T lunghezza d’onda (metri)
da notare:- λ= c·T lunghezza d onda (metri)- A ampiezza d’onda (metri)- T = 1/f periodo (sec.)ϕ = f·∆t + ϕ fase (cicli)
- f = dϕ/dt- c = fλ
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
- ϕ = f·∆t + ϕ0 fase (cicli)- ϖ = 2π/T pulsazione (rad/sec.)

Misure di faseMisure di faseequazioni:
( ) troposferaionosferasp ddctctP ++Δ⋅+=Δ⋅= τρ X
cf =
( )troposferaionosfera ddcf
cfc
cf
cftc +⋅+⋅Δ⋅+⋅=⋅Δ⋅ τρ =
( ) ( ) ( )troposferaionosferaRs
RsR dd
cfdTdtf
cfT +⋅+−⋅+⋅
=ρϕ
Q d d il i it l t T l iQuando accendo il ricevitore al tempo TR(0) posso solo misurare la parte fratta della differenza di fase tra il segnale ricevuto e quello replicato.
ϕ(TR(0))
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – GeomaticaTR(0)

Misure di faseMisure di faseequazioni:
( ) ( ) ( ) ( ))0(RsRtroposferaionosferaR
sR
sR TNdd
cfdTdtf
cfT −+⋅+−⋅+⋅
=ρϕ
cc
ambiguità iniziale
ϕ(TR(0))NsR(TR)
Anche in questo caso persistono le stesse problematiche:- sfasamento orologi
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
- ritardo tropo-ionosferico
Misure di fase: differenze singoleMisure di fase: differenze singoles
( ) ( ) sitroposferaionosferai
ssis
i NddcfdTdtf
cf
−+⋅+−⋅+⋅
=ρϕ
( ) ( )s ff ⋅ ρ ( ) ( ) s
jtroposferaionosferajsjs
j NddcfdTdtf
cf
−+⋅+−⋅+⋅
=ρ
ϕ
( ) ( ) ( )f ( ) ( ) ( )si
sjij
sj
si
sij NNdTdTf
cf
−−−⋅+−⋅= ρρϕij
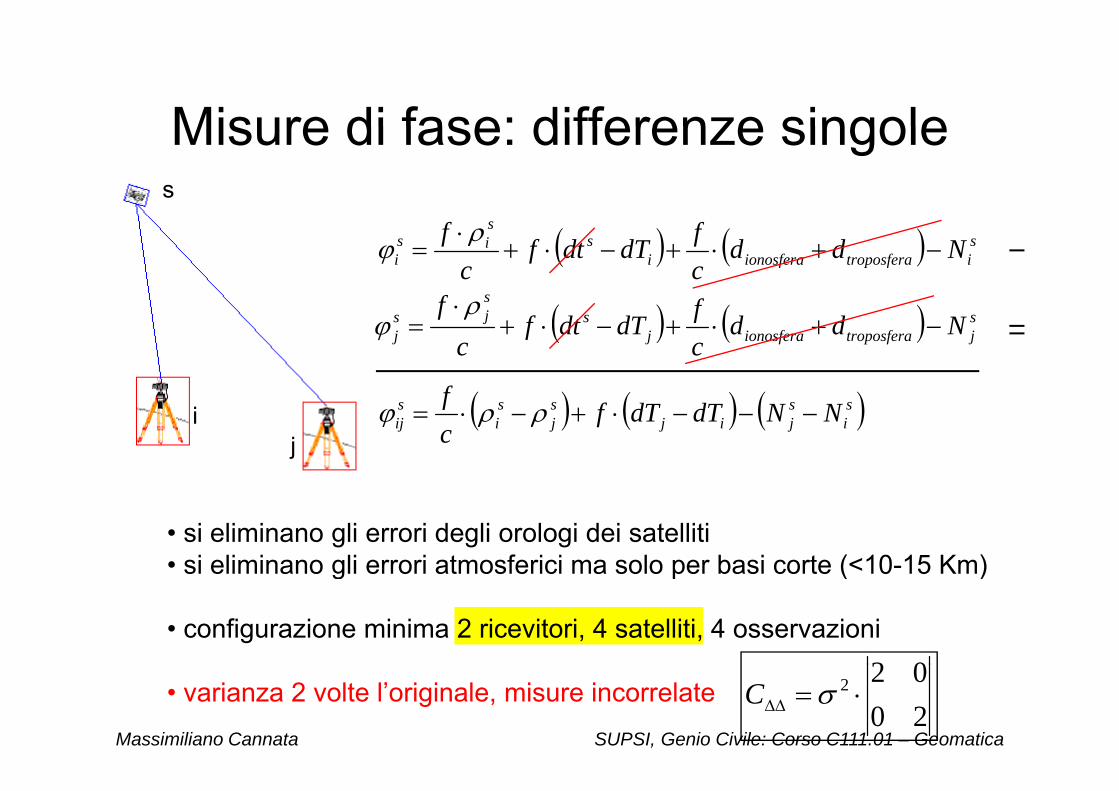
• si eliminano gli errori degli orologi dei satelliti• si eliminano gli errori atmosferici ma solo per basi corte (<10-15 Km)g p ( )
• configurazione minima 2 ricevitori, 4 satelliti, 4 osservazioni
02
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
• varianza 2 volte l’originale, misure incorrelate20022 ⋅=ΔΔ σC

Misure di fase: differenze doppieMisure di fase: differenze doppieh
k ( ) ( ) ( )fk ( ) ( ) ( )hi
hjij
hj
hi
hij NNdTdTf
cf
−−−⋅+−⋅= ρρϕ
( ) ( ) ( )kkkkk f
( ) ( )[ ] ( ) ( )[ ]f
( ) ( ) ( )ki
kjij
kj
ki
kij NNdTdTf
cf
−−−⋅+−⋅= ρρϕ
( ) ( )[ ] ( ) ( )[ ]ki
kj
hi
hj
kj
ki
hj
hi
hkij NNNN
cf
−−−−−−−⋅= ρρρρϕij
hkN∇Δ• si eliminano gli errori degli orologi dei ricevitori
hkijN∇Δ
• configurazione minima 2 ricevitori, 4 satelliti, 3 osservazioni
• varianza 4 volte l’originale misure correlate 012 −
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
varianza 4 volte l originale, misure correlate
2101212 2
−−−⋅=∇Δ∇Δ σC

Correzione degli erroriCorrezione degli errori
∆τ si elimina con differenze doppiedi f si elimina con differenze (basi corte)dionosfera si elimina con differenze (basi corte)dtroposfera si elimina con differenze (basi corte)
osservazioni (ϕih)
minimi quadrati
parametri stimati(∆X, ∆Y, ∆Z, )
precisione
hkijN∇Δ
precisione delle stimeprecisione
osservazioni (σ)
legame tra
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
legame tra osservate ed incognite (C)

Ambiguità di faseAmbiguità di faseN è un numero intero quindi scelgo l’intero piùN è un numero intero, quindi scelgo l intero più vicino al valore stimato dai minimi quadrati
fi l’ bi ità i i i l i ti l lfisso l’ambiguità iniziale e poi stimo solo le coordinate dei ricevitori.
33
+3σ-3σ
+3σ-3σ
ŇNi+1 Ni+2
Ni
S l il l di N i l i 3 è iù di il ti t t
Ň
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
Scelgo il valore di N incluso in ±3σ, se ce ne è più di uno uso il ratio test:(compenso usando tutti i valori di N compresi e poi scelgo quelli col σ minore)
Misure di fase: differenze tripleMisure di fase: differenze triplef
( ) ( )[ ] ( ) ( )[ ]f
( ) ( )[ ] ( ) ( )[ ]11 t
ki
kj
hi
hjt
kj
ki
hj
hi
hkij NNNN
cf
−−−−−−−⋅= ρρρρϕh k h’
k’ ( ) ( )[ ] ( ) ( )[ ]22 t
ki
kj
hi
hjt
kj
ki
hj
hi
hkij NNNN
cf
−−−−−−−⋅= ρρρρϕk
( ) ( )[ ] ( ) ( )[ ]ff
ji
( ) ( ) ( )[ ] ( ) ( )[ ]2121 t
kj
ki
hj
hit
kj
ki
hj
hi
hkij c
fcftt ρρρρρρρρϕ −−−⋅−−−−⋅=
j
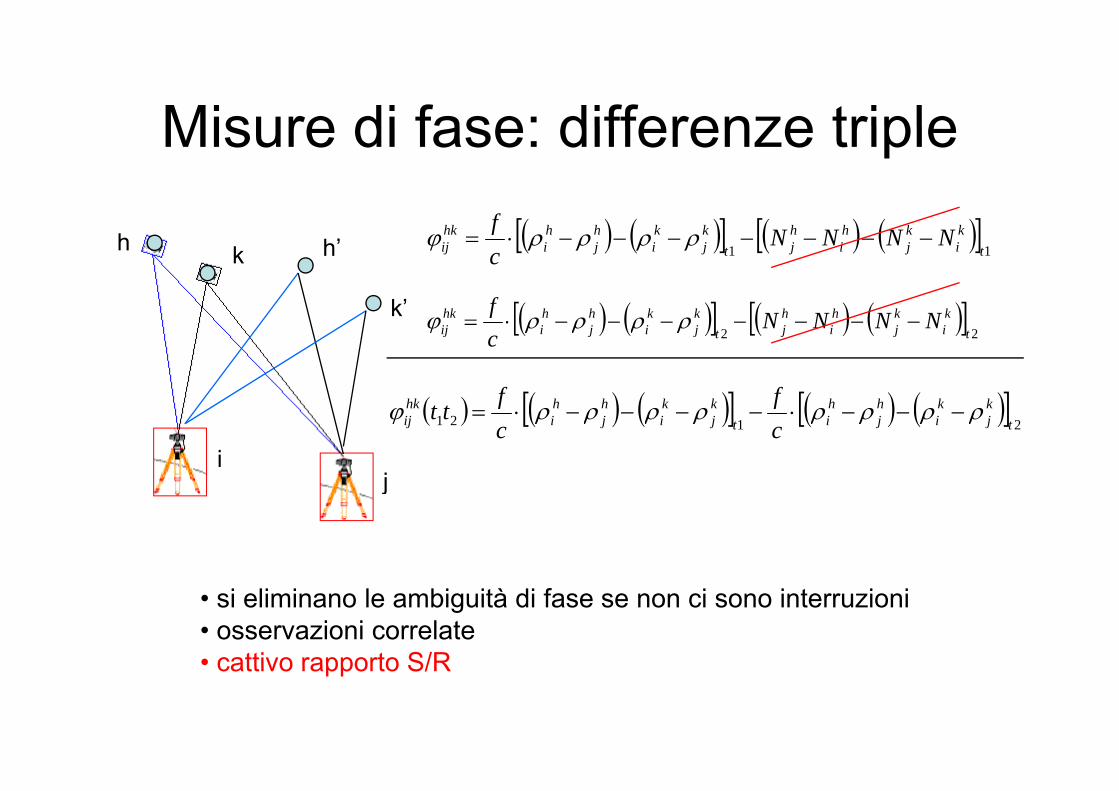
• si eliminano le ambiguità di fase se non ci sono interruzioni• osservazioni correlate• cattivo rapporto S/R• cattivo rapporto S/R

Cycles slipsCycles slipsSe si interrompe la ricezione del segnale del satellite il ricevitore perde il di i li i t i i t i t l’i t i d il i i ti d llil numero di cicli interi intercorsi tra l’interruzione ed il ripristino della ricezione nuova ambiguità di fase incognita
ϕ(TR(0))NsR(TR)
nuova incognita
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

Cycles slipsCycles slipsla rimozione di cycles slips avviene in y ppre-processamento utilizzando diverse tecniche:
– tecnica manuale
– tecnica automatica– tecnica automatica• ricevitore singolo
– misure fase-range– combinazione delle portanti– wide lane
• due ricevitori• due ricevitori– differenza singola di fase– differenza doppia di fase
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
– differenza tripla di fase

Cycles slips:Cycles slips:misure fase-range( ) ( )( ) ( ) ( )( ) NnoisettttttcPR Δ+=−−Δ−Δ⋅=− λϕϕλρρ ϕ 1212
∆N si può determinare con incertezza di 10 cicli
g
∆N si può determinare con incertezza di ~ 10 cicli
combinazione delle portanti( ) ( ) ( ) oionosfericeffettoN
ffNt
fftt LLLLion +−=−= 2
2
112
2
11 ϕϕϕ
combinazione delle portanti
ff 22
- effetto ionosferico è piccolo per basi corte- osservando ϕion nel tempo si evidenziano i cycles slip:
- salto = 1 per cycle slips solo in L1- salto = 1 per cycle slips solo in L1- salto = -1.28 per cycle slips solo in L2- salto = -0.28 per cycle slips in L1 e L2
- limite:
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
limite: - effetto ionosferico = rumore, - difficile ripartire salti > 1 ciclo sulle 2 portanti
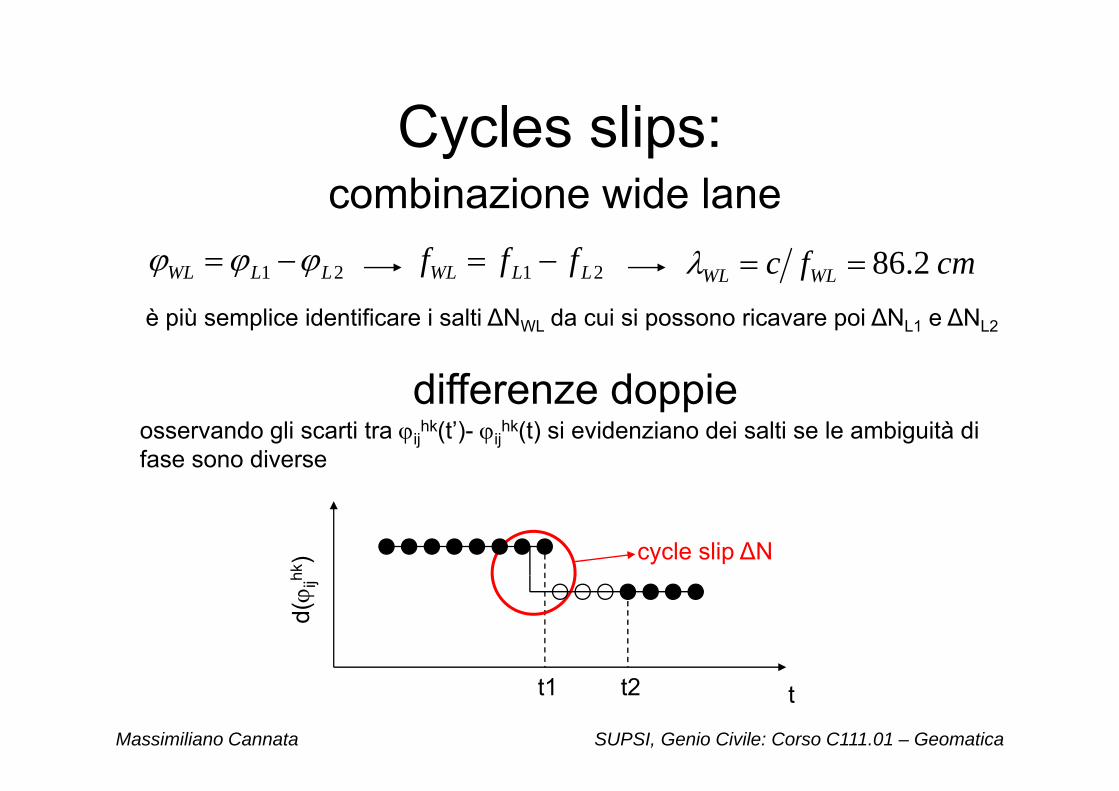
Cycles slips:Cycles slips:combinazione wide lane21 LLWL ϕϕϕ −= 21 LLWL fff −= cmfc WLWL 2.86==λ
differenze doppie
è più semplice identificare i salti ∆NWL da cui si possono ricavare poi ∆NL1 e ∆NL2
differenze doppieosservando gli scarti tra ϕij
hk(t’)- ϕijhk(t) si evidenziano dei salti se le ambiguità di
fase sono diverse
hk) cycle slip ∆N
d(ϕ i
jh
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
t1 tt2

Cycles slips:Cycles slips:
differenze tripleosservando gli scarti tra δϕij
hk(t’)- δϕijhk(t) si evidenziano dei salti se le ambiguità
di fase sono diversedi fase sono diverse)
cycle slip ∆Nd(δϕ
ijhk)
t1 t
y p
t2
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

MultipathMultipath
• Il segnale arriva al ricevitore dopo una riflessione e quindi la distanza misurata è qpiù lunga.
• Schermi per segnali provianenti dal basso o laterali
• Eliminazione di segnali con polarizzazione inversa (solo 1 ifl i )riflessione)
• Scelta di un punto di posizionamento opportuno
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
posizionamento opportuno

Errore di centro di fase dell’antennaErrore di centro di fase dell antenna
Il centro di fase dell’antenna non è noto con precisione assoluta.p
•CF=f(elevaz(Z),azimut(α),freq(f1/f2))
•Si suppone l’antenna isotropa e si usano parametri di calibrazione relativi e
l tiassoluti
•Si trovano su: NordNordhttp://www.ngs.noaa.gov/ANTCAL/
Per basi corte se le antenne sono orientate A Ad reale
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
allo stesso modo la base misurata è “uguale” a quella reale
B Bd misurata

riassumendoriassumendo( ) MPCVONTITd ssss δδδλδδδδλ ( ) MPCVONTITtcd s
RRss
RmissR δδδλδδδδϕλϕ ++++++−⋅+=⋅=
distanzaric-sat errore
orologierrore
ionosfericoambiguità
di fase
errore centro antennag
erroretroposferico
errore di orbita
antenna
errore multipathp
si eliminacon differenze
si eliminacon modelli e differenzesi stima quella
si usano effemeride posizionee differenze
iniziale e quella dovutaa cycles slips
precise e basi corte
si usano parametri
di staz.opportuna
basi corte ~ 10 Km
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
si usano parametricalibraz e orientamento
uguale su basi corte
basi corte ~ 10 Km
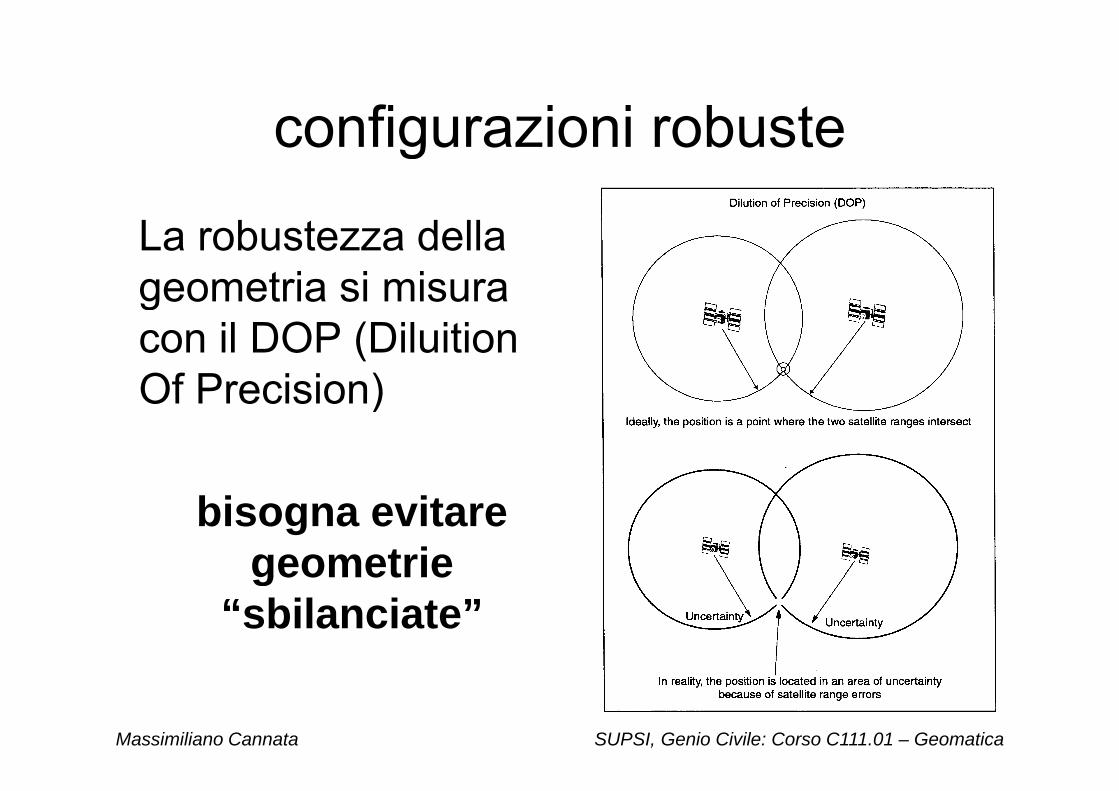
configurazioni robusteconfigurazioni robuste
La robustezza della geometria si misura gcon il DOP (Diluition Of Precision)Of Precision)
bisogna evitare geometriegeometrie
“sbilanciate”
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

configurazioni robusteconfigurazioni robuste
• In particolare si definisce il PDOP (Position Diluition Of Precision) che si ( )suddivide in:
• HDOP (Horizontal dilution of precision)HDOP (Horizontal dilution of precision)• VDOP (Vertical dilution of precision)
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

configurazioni robusteconfigurazioni robuste
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
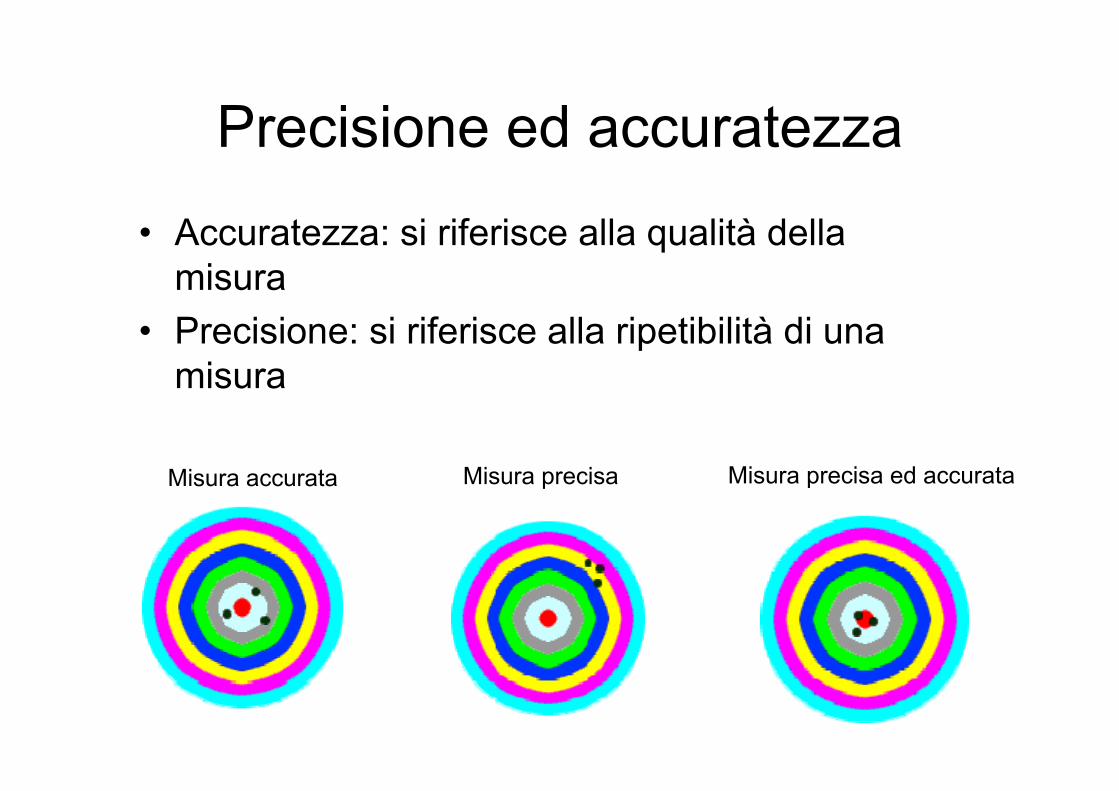
Precisione ed accuratezzaPrecisione ed accuratezza
• Accuratezza: si riferisce alla qualità della misura
• Precisione: si riferisce alla ripetibilità di una misura
Misura accurata Misura precisa Misura precisa ed accurataMisura accurata p p

Aspetti pratici delle misure GPSp pProgramma della presentazione
Metodologie di rilievo GPS e precisioni
Trasformazione di coordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento delle misure effettuate
Pianificazione e realizzazione di una campagna GPS
Analisi dei risultati ottenuti
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Schema riassuntivoMETODOLOGIE GPSMETODOLOGIE GPS
CODICE FASETipo d’osservazione
(quale segnale GPS?)
Tempo reale Post-trattamento Tempo reale Post-trattamento
(quale segnale GPS?)
Assoluto Relativo Assoluto Relativo Assoluto Relativo Assoluto Relativo
Modo di posizionamento(strategia adottata)
3 - 15 m 0.3 - 1.5 m 2 - 5 m 0.2 - 1.5 m Nessunaapplicazione 1 - 10 cm Nessuna
applicazione 0.1 - 10 cm
DGPS RTK-GPS
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Posizionamento assoluto o relativo ?Il i t GPS d t i l i i d l i it t it i t iIl sistema GPS determina la posizione del ricevitore tramite intersezionedi distanze. Queste sono misurate tramite osservazioni sul CODICE o Sulla FASE
Possiamo quindi calcolare :
La posizione del ricevitore in modoassoluto (posizionamento assoluto)
1 solo ricevitore
La differenza di coordinate tra 2 o più
1 solo ricevitore,minimo 4 satelliti
pricevitori (posizionamento relativo o differenziale)
minimo 2 ricevitori,i i lt
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
misure simultaneesugli stessi satelliti

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Metodologie di rilievo più utilizzate (1) M d di i i t l tl t i lModo di posizionamento assolutoassoluto, in generale [CODICE]
Precisione max 2 mmax 2 m: insufficiente per il pmonitoraggio geologico
M d di i i t l til ti DGPSDGPSModo di posizionamento relativorelativo – DGPSDGPS [CODICE]
Precisione max 0.3max 0.3 m : insufficiente per il monitoraggiomonitoraggio geologico
PRC (PseudoRange Correction)PRC (PseudoRange Correction)==
• 2 ricevitori, misure simultanee di stessi satellitiInvia
correzioni
==PR Osservate PR Osservate –– PR CalcolatePR Calcolate
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
• comunicazione radio (UHF, VHF, FM, ecc.), natel (GSM, GPRS, ecc.), Internet
Riceve correzioni

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Metodologie di rilievo più utilizzate (2) Modo di posizionamento relativorelativo RTKRTKModo di posizionamento relativorelativo – RTK RTK [FASE]
Precisione ancora insufficiente per il monitoraggio
Risoluzione delle ambiguità di ciclo sul terrenoed ottenimento delle coordinate del ricevitore monitoraggio
geologico
anche in questo caso come DGPS :
ed ottenimento delle coordinate del ricevitoreitinerante (rover) in tempo reale con precisione 1 1 –– 2 cm + 2 ppm2 cm + 2 ppm
anche in questo caso, come DGPS :
PRC (PseudoRange Correction)PRC (PseudoRange Correction)==
PR OsservatePR Osservate –– PR CalcolatePR Calcolatei(N ) t
i(f )
Satellite i Ricevitore k
PR Osservate PR Osservate PR CalcolatePR Calcolate(N )k tb(f )
k tb
Servizio AGNESAGNES – Swisstopo(Automatisches GPS Netz Schweiz)(Automatisches GPS Netz Schweiz)
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
M d di i i t l til ti P t T tt tP t T tt t
Metodologie di rilievo più utilizzate (3)
Precisione OK per il monitoraggio
Modo di posizionamento relativorelativo – Post Trattamento Post Trattamento [FASE]
Risoluzione delle ambiguità di ciclo in ufficiocon programmi specifici (esempio SKI Pro Leica) gg
geologicocon programmi specifici (esempio SKI Pro Leica)ed ottenimento delle coordinate del ricevitoreitinerante (rover) dopo il Post Trattamentocon precisione 2 mm + 1 ppm2 mm + 1 ppmcon precisione 2 mm + 1 ppm2 mm + 1 ppm
Si differenzia da RTK per il fatto che :
lo stazionamento sui punti misurati é prolungato per cui, mododi posizionamento STATICOSTATICO o STATICOSTATICO--RAPIDORAPIDO
non é necessaria la comunicazione (radio, natel, ecc.) tra Referenza e Rover
Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
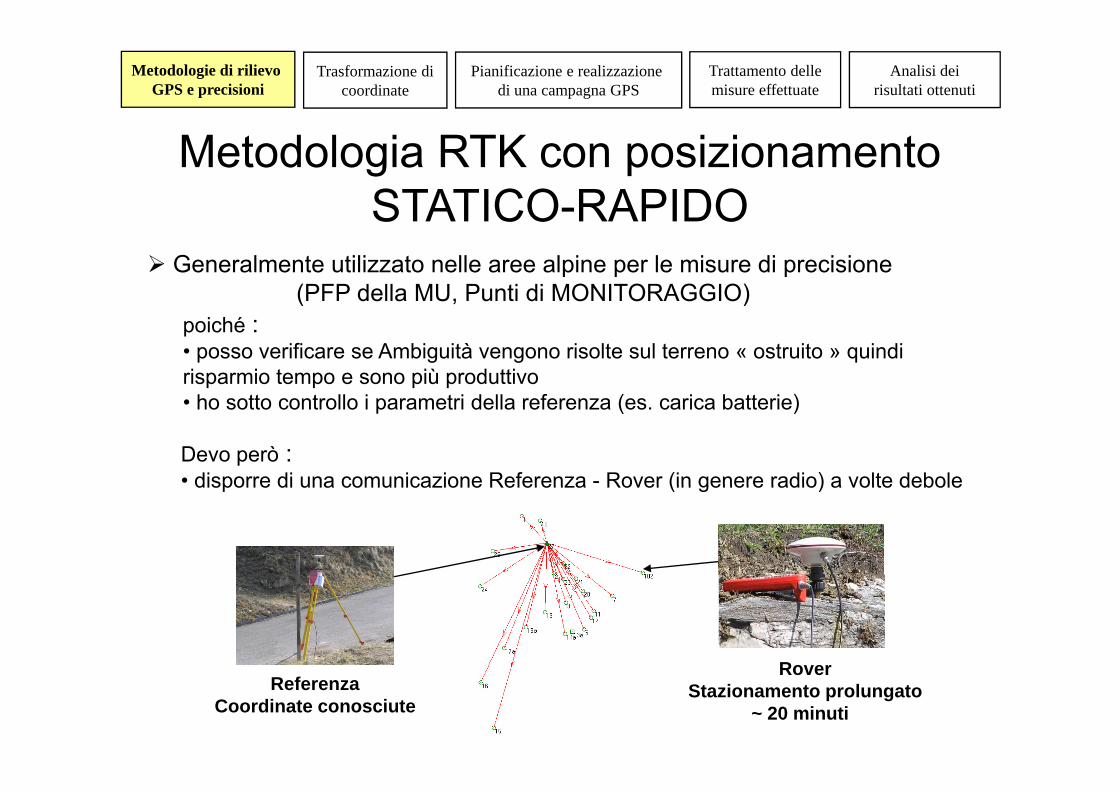
Metodologia RTK con posizionamento STATICO-RAPIDOSTATICO RAPIDO
Generalmente utilizzato nelle aree alpine per le misure di precisione (PFP della MU, Punti di MONITORAGGIO)( )
poiché :• posso verificare se Ambiguità vengono risolte sul terreno « ostruito » quindi risparmio tempo e sono più produttivo
h tt t ll i t i d ll f ( i b tt i )• ho sotto controllo i parametri della referenza (es. carica batterie)
Devo però :• disporre di una comunicazione Referenza - Rover (in genere radio) a volte deboledisporre di una comunicazione Referenza Rover (in genere radio) a volte debole
RReferenza
Coordinate conosciute
RoverStazionamento prolungato
~ 20 minuti

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Riassumendo Tipo
d’osservazioneModo di
posizionamentoMetodologia di
rilievoPrecisione
CODICE Assoluto navigazione 2 – 10 m
CODICE Relativo DGPS 0.3 – 1.5 m
FASE Relativo Statico 2 mm + 1 ppm2 mm + 1 ppm
FASE Relativo Statico-rapido 2 mm + 2 ppm2 mm + 2 ppm
FASE R l ti RTK 1 2 2FASE Relativo RTK 1 a 2 cm + 2 ppm

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Sistemi di riferimento geodeticiZ Z Z
Y
Z
Y
Z
Y
Z
GlobaleX
Y
ContinentaleX
Y
RegionaleX
Y
WGS 84WGS 84 ~ WGS 84 ~ WGS 84
MN95MN953 Traslazioni3 Traslazioni
GRANITGRANIT7 Parametri7 Parametri
Z
A
YBessel
FINELTRA
SV
IZZE
RA
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
LocaleCH1903+ / MN95XLocale
CH1903 / MN03
S

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
T l t f i di di tTappe per la trasformazione di coordinate(caso CH)
Trovo : long, lat e HWGS84 (sull’ellissoide globale)
Tasformo in : Y, X e Hellips Bessel (sull’ellissoide locale), ellips. Bessel ( )
Correggo in : HGeoide = Hellips. Bessel + N (quota geoide)
Geoide: forma
geoide)
Geoide: forma fisica della terra.N
Ellissoide di rivoluzione: forma della
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
Ellissoide di rivoluzione: forma della terra descritta da equazioni matematiche.

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Tappe per la trasformazione di coordinate(caso CH nel dettaglio)
Scopo : da coordinate WGS 84WGS 84 a coordinate nazionali con altezze usualicoordinate nazionali con altezze usuali
Coordinate geocentriche cartesiane WGS 84WGS 84X, Y, Z
GRANIT P i l li ( f d)
Coordinate geocentriche cartesiane CH1903CH1903X’, Y’, Z’
GRANIT o Parametri locali (trasf. coord)
GPS
REF
, ,
Coordinate nazionali ed altezze ellissoidali
Proiezione svizzera o locale
G
y, x, h
C di t i li d lt li
Quota del geoide
Geo
98
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
Coordinate nazionali ed altezze usualiy, x, HC
H

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Esempi praticiProgrammi specificiProgrammi specifici
Esempio : GPSREF (Swisstopo)Esempio : GPSREF (Swisstopo)SKI-Pro (Leica)CHGeo98 (Swisstopo)…
Portali onPortali on--lineline
Esempio : GPSREF e CHGeo98 on-line
TransCoCo (EPFL)http://www.swisstopo.ch/fr/online/calculation/georef/
http://topo.epfl.ch/documents/transcoco/transcoco.php
…

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Tappe principaliScelta della metodologia GPSSopprattutto in funzione : 1.Precisione finale richiesta1.Precisione finale richiesta, 2.Equipaggiamento a disposizione2.Equipaggiamento a disposizione
[FASE], relativo : es. Statico Rapido
F t i i ifi i d ll GPSFase preparatoria o pianificazione della campagna GPS• Raccolta dati e materiale (carte, coordinate indicative dei punti, ecc.)
• Ricognizione (conoscenza terreno, ostruzioni, scelta Referenza, ecc.)Ricognizione (conoscenza terreno, ostruzioni, scelta Referenza, ecc.)
• Pianificazione dettagliata delle misure (liste di passaggio sui punti)
• Configurazione degli strumenti (Jog, Configure, Stake Out, ecc.)
C l li GPS + t f i di t
Misure sul terreno o osservazioni GPS
Calcoli GPS + trasformazione coordinate
Calcoli di compensazione ed ottenimento delle coordinate definitive
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
Spostamento del punto = T Spostamento del punto = T NN –– T T NN--11
Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
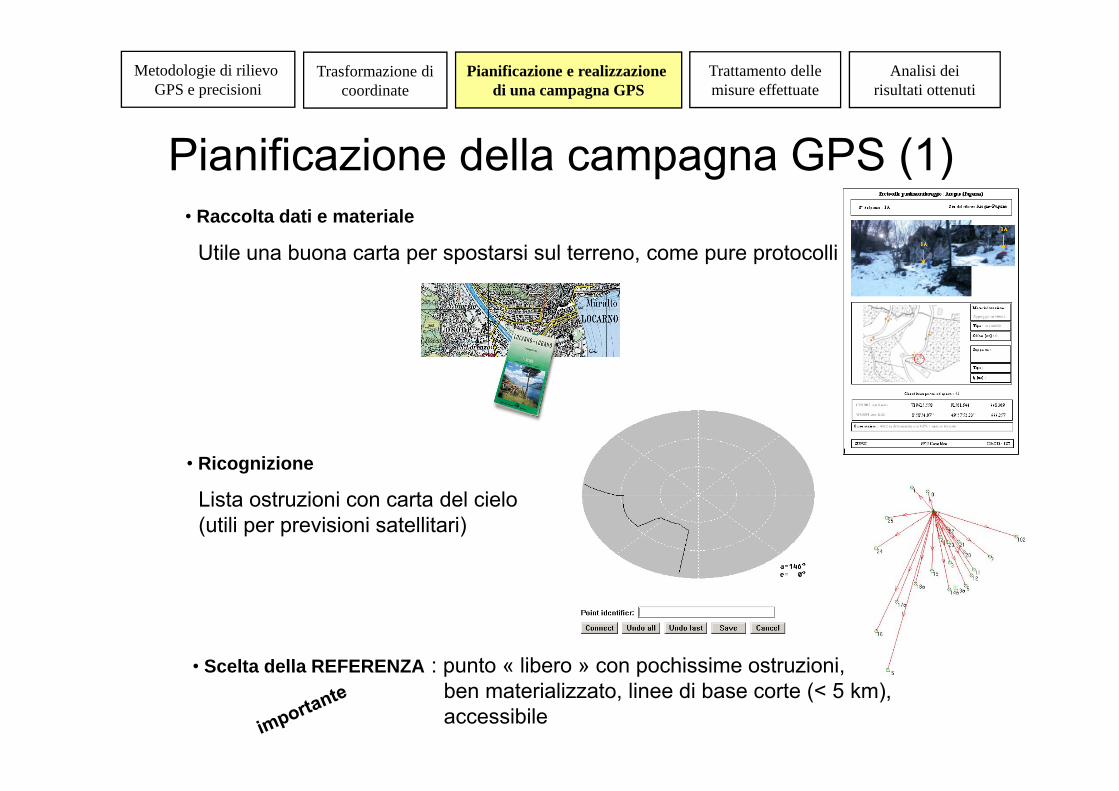
Pianificazione della campagna GPS (1)• Raccolta dati e materiale• Raccolta dati e materiale
Utile una buona carta per spostarsi sul terreno, come pure protocolli
• Ricognizione
Lista ostruzioni con carta del cielo(utili per previsioni satellitari)
• Scelta della REFERENZA : punto « libero » con pochissime ostruzioni• Scelta della REFERENZA : punto « libero » con pochissime ostruzioni, ben materializzato, linee di base corte (< 5 km),accessibile

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Pianificazione della campagna GPS (2)• Pianificazione dettagliata delle misure• Pianificazione dettagliata delle misure
Lista di passaggio o orari di stazionamento sui punti, previsioni satellitari sui punti perGDOP (< 3) per ottimizzare la misura
Satellite Availability
• Configurazione degli strumentiREFERENZA + ROVERREFERENZA + ROVER jobjob
configureIntroduzione coordinate della REFERENZA

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Misure o osservazioni GPS (1)DIRETTIVEDIRETTIVE CHCH
É come misurare i punti fissi della MUÉ come misurare i punti fissi della MUDirettive federali su reti 1996Direttive federali su reti 1996
DIRETTIVEDIRETTIVE
Misurare la rete 2 volte : • 1 Andata (una o più sessioni)
1 Rit ( iù i i)• 1 Ritorno (una o più sessioni)
Possibilmente cambiamento REFERENZA tra andata e ritorno

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Misure o osservazioni GPS (2)MATERIALIZZAZIONE DEI PUNTI DI MONITORAGGIOMATERIALIZZAZIONE DEI PUNTI DI MONITORAGGIOMATERIALIZZAZIONE DEI PUNTI DI MONITORAGGIOMATERIALIZZAZIONE DEI PUNTI DI MONITORAGGIO
Per una maggior precisione di posizionamento,Ideale la Vite in ottone
Centro del punto
Posizionatabile per esempio su rocce affioranti o elementi costruiti
Ideale anche per posizionamento di altri strumenti

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Calcoli GPS + trasformazione coordinate Per ogni sessione, misurata con metodo differenziale :Per ogni sessione, misurata con metodo differenziale :
1. Definisco i parametri di Post-trattamento(es. modello atmosferico, definire Ref e Rover, ecc.)
2. Ottenimento delle linee di base,quindi coordinate precise
CalcoloCalcolo
Calcolo
3. Trasformazione coordinatenel sistema voluto ed export

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Calcolo di compensazione edottenimento delle coordinate definitive
Leggermente differenti
Anche se stessa rete
Misure ANDATA Misure RITORNO
gg
Costellazione, condizioni atmosferiche, ecc. DIFFERENTI
Calcolo di compensazioneminimi quadrati : Sv2 = min
C di t d fi iti d i ti di it iC di t d fi iti d i ti di it i
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
Coordinate definitive dei punti di monitoraggioCoordinate definitive dei punti di monitoraggio

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Esempio di calcolo compensatorio Listato di calcolo con parametri di precisione ed affidabilità dei puntiListato di calcolo con parametri di precisione ed affidabilità dei puntidi monitoraggio
Precisioni

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Vettori di spostamento dei punti di monitoraggiomonitoraggio
Spostamento del punto = coordinateT Spostamento del punto = coordinateT NN –– coordinateT coordinateT NN--11
T T NN--11 : Campagna di misura ad epoca T : Campagna di misura ad epoca T NN--11
T T NN : Campagna di misura ad epoca T : Campagna di misura ad epoca T NN
Lunghezza NONLunghezza NONinferiore alla precisioneinferiore alla precisione
di determinazionedi determinazionedi determinazionedi determinazionese accade
Movimento non certoMovimento non certo
Per esperienza errore medio di determinazione del vettoredi spostamento: ~ 10 mm in planimetria e ~ 15 mm in altimetria
Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
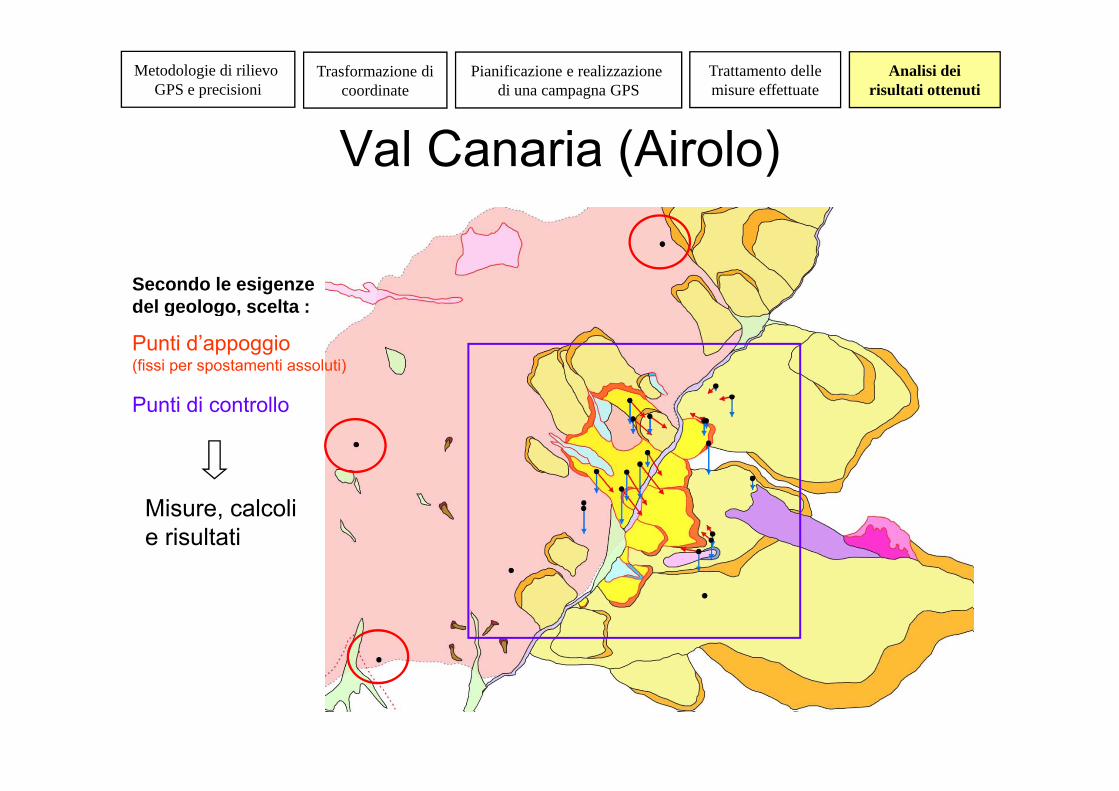
Val Canaria (Airolo)
Secondo le esigenze del geologo scelta :del geologo, scelta :
Punti d’appoggio(fissi per spostamenti assoluti)
Punti di controllo
Misure, calcolie risultati

Metodologie di rilievo GPS e precisioni
Trasformazione dicoordinate
Pianificazione e realizzazione di una campagna GPS
Trattamento dellemisure effettuate
Analisi deirisultati ottenuti
Cerentino
• 24 punti misurati• 1 referenza + 3 rover• 32 ore di lavoro32 ore di lavoro(1 andata e 1 ritorno)
• 5 mm planim. 8 mm altim.• Spostam. tot. ~ 3 - 4 cm
100 CHf t
Massimiliano Cannata SUPSI, Genio Civile: Corso C111.01 – Geomatica
~ 100 CHfr a punto
