robot modeling and the forward kinematic solution me 4135 lecture series 4 – part 2 6 dof...
TRANSCRIPT

Robot Modeling and the Forward Kinematic Solution
ME 4135Lecture Series 4 – PART 26 DOF Articulating Arm

Another? 6dof Articulating Arm – (The Figure Contains Frame Skelton)
l2
l3l4

LP TableFrames Link Var d l S C S C
0 → 1 1 R 1 0 0 90 -1 0 S1 C1
1 → 2 2 R 2 0 a2 0 0 1 S2 C2
2 → 3 3 R 3 0 a3 0 0 1 S3 C3
3 → 4 4 R 4 0 a4 -90 -1 0 S4 C4
4 → 5 5 R 5 0 0 90 1 0 S5 C5
5 → 6 6 R 6* d6 0 0 0 1 S6 C6
* With End Frame in Better Kinematic Home, otherwise is (6 - 90), which is a problem!

Using MathCad:

A Matrices, in Robot shorthand
1
1 0 1 0
1 0 1 0
0 1 0 0
0 0 0 1
C S
S CA
2
22
2 2 0 2
2 2 0 2
0 0 1 0
0 0 0 1
C S l C
S C l SA
3
33
3 3 0 3
3 3 0 3
0 0 1 0
0 0 0 1
C S l C
S C l SA
4
44
4 0 4 4
4 0 4 4
0 1 0 0
0 0 0 1
C S l C
S C l SA

A Matrices, cont.
5
5 0 5 0
5 0 5 0
0 1 0 0
0 0 0 1
C S
S CA
66
6 6 0 0
6 6 0 0
0 0 1
0 0 0 1
C S
S CA
d

Leads To:
A FKS of:
01 2 3 4 5 6nT A A A A A A

Solving for FKSPre-process {A2*A3*A4} to collect
angular termsThey are the planer arm issue as
in the previous robot model
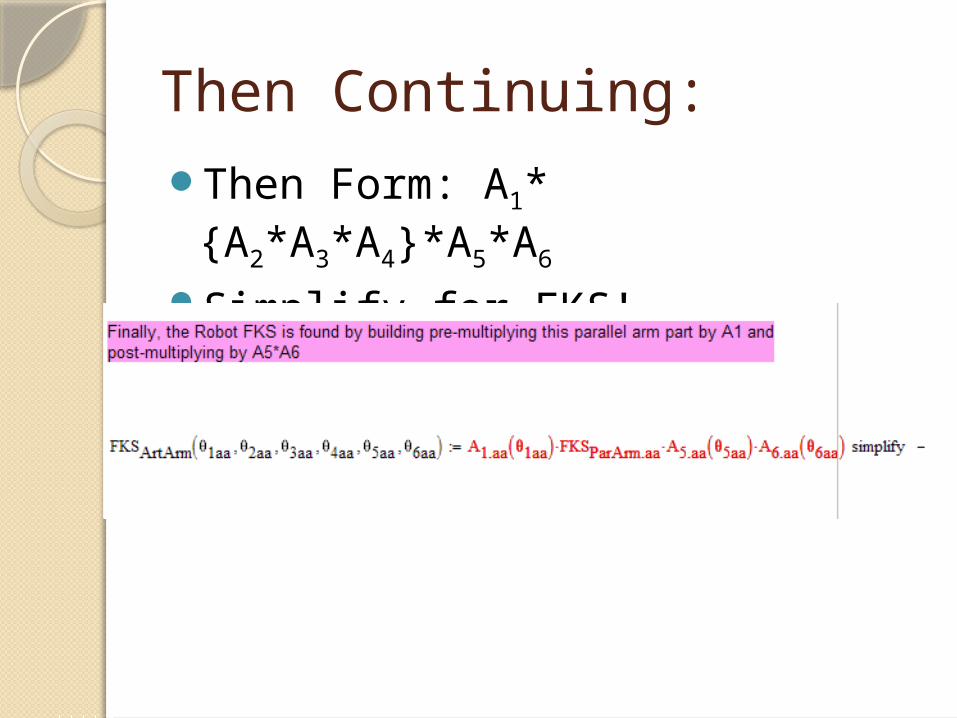
Then Continuing:Then Form: A1* {A2*A3*A4}*A5*A6
Simplify for FKS!

Simplifies to:nx = R11 = C1·(C5·C6·C234 - S6·S234) - S1·S5·C6ny = R21 = C1·S5·C6 + S1·(C5·C6·C234 - S6·S234)nz = R31 = S6·C234 + C5·C6·S234
ox = R12 = S1·S5·S6 - C1·(C5·S6·C234 + C6·S234)oy = R22 = - C1·S5·S6 - S1·(C5·S6·C234 + C6·S234)oz = R32 = C6·C234 - C5·S6·S234
ax = R13 = C1·S5·C234 + S1·C5ay = R23 = S1·S5·C234 - C1·C5az = R33 = S5·S234
dx = C1·(C234·(d6·S5 + l4) + l3·C23 + l2·C2) + d6·S1·C5
dy = S1·(C234·(d6·S5 + l4) + l3·C23 + l2·C2) - d6·C1·C5
dz = S234·(d6·S5 + l4) + l3·S23 + l2·S2
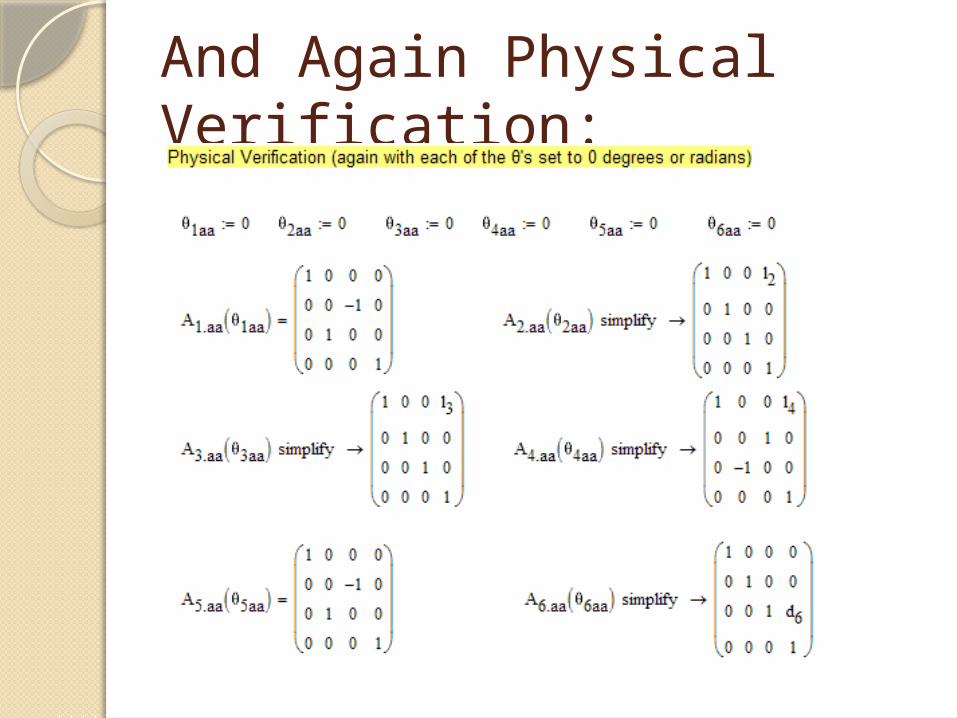
And Again Physical Verification:
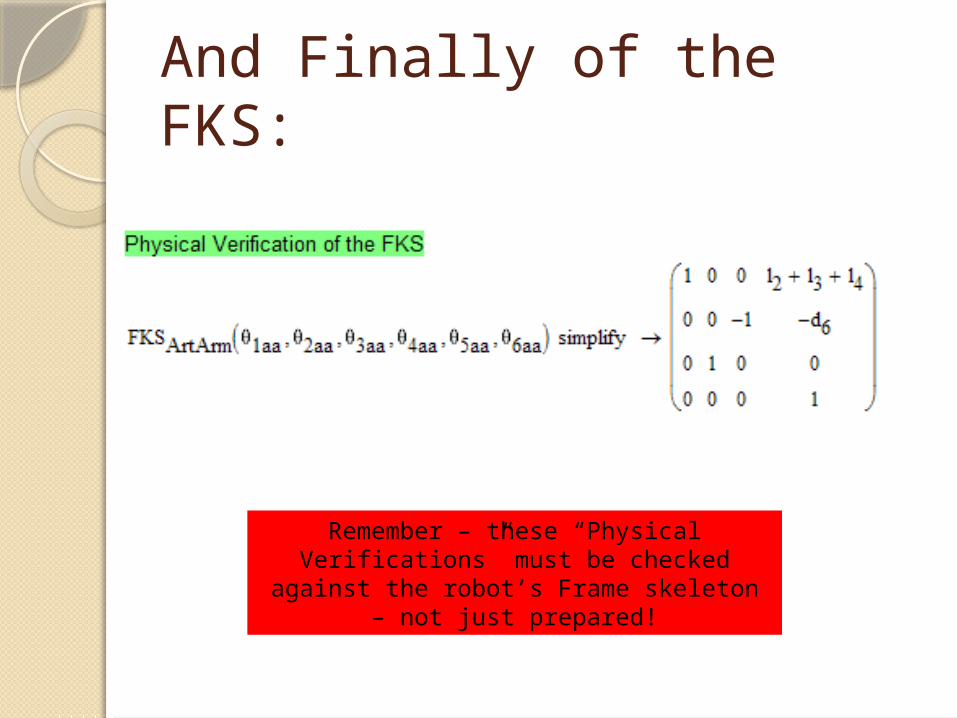
And Finally of the FKS:
Remember – these “Physical Verifications” must be checked against the robot’s Frame skeleton –
not just prepared!

You should Develop Frame Skeleton for each of the Various Arm TypesSCARACylindricalPrismatic
◦Gantry◦Cantilevered

And Proceeding from the text It is often possible to find that robots
are assembled from Arms and various Wrist
Thus Arms ‘control’ the Positional issues of POSE
And Wrist ‘adjust’ the Orientation Issues of POSE
Hence these POSE issues can be treated separately
See text for Wrist Details◦ Spherical◦ RPY of various arrangements