robot sensors - seattle · pdf filerobot sensors - outline • what is a sensor? •...
TRANSCRIPT

Robot Sensors An Overview
By Steven D Kaehler - SRS SecretaryMeeting Organizer
Steve Kaehler - Who Am I bull EE at Boeing (BCA) bull Instrumentation Engineer bull Specialize in ldquomeasuring thingsrdquo bull gtgt25 yrs experience bull Design build amp use sensors signal
conditioning amp data acquisition systems bull SRS Sec amp Meeting Organizer bull SRS meetingevent attender since 1997 bull Hobby robot builder (time permitting)
Robot Sensors - Outline bull What is a sensor bull Why do robots need them bull Sensors layers on robots bull What kinds of thing can be sensed bull What sensors are out there bull What can they do bull How much do they cost bull Briefly on signal conditioninghellip
Robot Sensors - Objectives
bull Show a lot of examples bull Try to explain how they work bull Reference Encoder articles bull Point to vendor websites bull Encourage research bull Encourage sensor experimentation bull Move very quickly
What is a Sensor
bull A device that converts one thing to another
bull A device that produces an electrical response to some external stimulus
bull Something that responds to the environment
bull An electronic device that measures amp quantifies something by converting it into a measureable electronic signal
bull A transducer
Why Do Robots Need Sensors
bull Provides ldquoawarenessrdquo of surroundings ndash Whatrsquos ahead around ldquoout thererdquo
bull Allows interaction with environment ndash Robo-mower can ldquoseerdquo grass yard perimeter
bull Protection amp Self-Preservation ndash Safety Damage Prevention Stairwell sensor
bull Gives the robot capability to goal-seek ndash Find colorful objects seek goals explore
bull Makes robots ldquointerestingrdquo
Robot Sensor Layers bull Consider a Robotrsquos Functional Purpose
ndash Security extending human visibility cheap staff ndash Surveillance remote monitoring tele-presence ndash Exploration (dangerous or far away places) ndash Research amp development ndash Contests amusement fun ndash The Challenge of ldquoCan I do itrdquo
Robot Sensor Layers bull Lines of Defense (of the robot)
ndash Distant object detection (eg distance) ndash Area sensors (non-directional object presence) ndash Non-contact close proximity (a few inches) ndash Physical contact detection (collision detection)
Sensors - What Can Be Sensed
Just about anythinghellip But how
The Ideal Sensorhellip bull Responds from DC to light bull Detects all electrostatic amp electromagnetic radiation bull Can measure anything with infinite resolution
bull Is cheap plentiful easy to use indestructible
bull Can easily discriminatefilter anything desired
bull Produces data thatrsquos easy to analyze
bull Can measure everything with absolute accuracy
bull Does it allhellip
bull Is capable of analyzing its own data
The Ideal Sensorhellip
Unfortunately DOESNrsquoT EXISThellipYET
Sensors - What Can Be Sensed bull Light (visible amp invisible)
ndash Presence color intensity content (mod) direction bull Sound (audible amp inaudible)
ndash Presence frequency intensity content (mod) direction bull Heat (invisible light)
ndash Temperature wavelength magnitude direction bull Chemicals
ndash Presence concentration identity etc bull Object Proximity
ndash Presenceabsence distance bearing color etc bull Physical orientationattitudeposition
ndash Magnitude pitch roll yaw coordinates etc
Sensors - What Can Be Sensed
bull Magnetic (B-Field) amp Electric (E-Field) Fields ndash Presence magnitude (int) orientation content (mod)
bull ResistanceConductivity (indirectly via E or I) ndash Presence magnitude variation etc
bull Capacitance (indirectly via excitationoscillation) ndash Presence magnitude variationetc
bull Inductance (indirectly via excitationoscillation) ndash Presence magnitude variation etc
bull Other Things
Passive vs Active Sensors
bull Sensor are usually part of a ldquosystemrdquo ndash Electronics make them work
bull Passive ndash Sits (passively) amp listens or watches ndash Photo-sensors microphones etc
bull Active ndash emits something looks for reflections ndash Ultrasonic laser ranger etc
What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Steve Kaehler - Who Am I bull EE at Boeing (BCA) bull Instrumentation Engineer bull Specialize in ldquomeasuring thingsrdquo bull gtgt25 yrs experience bull Design build amp use sensors signal
conditioning amp data acquisition systems bull SRS Sec amp Meeting Organizer bull SRS meetingevent attender since 1997 bull Hobby robot builder (time permitting)
Robot Sensors - Outline bull What is a sensor bull Why do robots need them bull Sensors layers on robots bull What kinds of thing can be sensed bull What sensors are out there bull What can they do bull How much do they cost bull Briefly on signal conditioninghellip
Robot Sensors - Objectives
bull Show a lot of examples bull Try to explain how they work bull Reference Encoder articles bull Point to vendor websites bull Encourage research bull Encourage sensor experimentation bull Move very quickly
What is a Sensor
bull A device that converts one thing to another
bull A device that produces an electrical response to some external stimulus
bull Something that responds to the environment
bull An electronic device that measures amp quantifies something by converting it into a measureable electronic signal
bull A transducer
Why Do Robots Need Sensors
bull Provides ldquoawarenessrdquo of surroundings ndash Whatrsquos ahead around ldquoout thererdquo
bull Allows interaction with environment ndash Robo-mower can ldquoseerdquo grass yard perimeter
bull Protection amp Self-Preservation ndash Safety Damage Prevention Stairwell sensor
bull Gives the robot capability to goal-seek ndash Find colorful objects seek goals explore
bull Makes robots ldquointerestingrdquo
Robot Sensor Layers bull Consider a Robotrsquos Functional Purpose
ndash Security extending human visibility cheap staff ndash Surveillance remote monitoring tele-presence ndash Exploration (dangerous or far away places) ndash Research amp development ndash Contests amusement fun ndash The Challenge of ldquoCan I do itrdquo
Robot Sensor Layers bull Lines of Defense (of the robot)
ndash Distant object detection (eg distance) ndash Area sensors (non-directional object presence) ndash Non-contact close proximity (a few inches) ndash Physical contact detection (collision detection)
Sensors - What Can Be Sensed
Just about anythinghellip But how
The Ideal Sensorhellip bull Responds from DC to light bull Detects all electrostatic amp electromagnetic radiation bull Can measure anything with infinite resolution
bull Is cheap plentiful easy to use indestructible
bull Can easily discriminatefilter anything desired
bull Produces data thatrsquos easy to analyze
bull Can measure everything with absolute accuracy
bull Does it allhellip
bull Is capable of analyzing its own data
The Ideal Sensorhellip
Unfortunately DOESNrsquoT EXISThellipYET
Sensors - What Can Be Sensed bull Light (visible amp invisible)
ndash Presence color intensity content (mod) direction bull Sound (audible amp inaudible)
ndash Presence frequency intensity content (mod) direction bull Heat (invisible light)
ndash Temperature wavelength magnitude direction bull Chemicals
ndash Presence concentration identity etc bull Object Proximity
ndash Presenceabsence distance bearing color etc bull Physical orientationattitudeposition
ndash Magnitude pitch roll yaw coordinates etc
Sensors - What Can Be Sensed
bull Magnetic (B-Field) amp Electric (E-Field) Fields ndash Presence magnitude (int) orientation content (mod)
bull ResistanceConductivity (indirectly via E or I) ndash Presence magnitude variation etc
bull Capacitance (indirectly via excitationoscillation) ndash Presence magnitude variationetc
bull Inductance (indirectly via excitationoscillation) ndash Presence magnitude variation etc
bull Other Things
Passive vs Active Sensors
bull Sensor are usually part of a ldquosystemrdquo ndash Electronics make them work
bull Passive ndash Sits (passively) amp listens or watches ndash Photo-sensors microphones etc
bull Active ndash emits something looks for reflections ndash Ultrasonic laser ranger etc
What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-
Robot Sensors - Outline bull What is a sensor bull Why do robots need them bull Sensors layers on robots bull What kinds of thing can be sensed bull What sensors are out there bull What can they do bull How much do they cost bull Briefly on signal conditioninghellip
Robot Sensors - Objectives
bull Show a lot of examples bull Try to explain how they work bull Reference Encoder articles bull Point to vendor websites bull Encourage research bull Encourage sensor experimentation bull Move very quickly
What is a Sensor
bull A device that converts one thing to another
bull A device that produces an electrical response to some external stimulus
bull Something that responds to the environment
bull An electronic device that measures amp quantifies something by converting it into a measureable electronic signal
bull A transducer
Why Do Robots Need Sensors
bull Provides ldquoawarenessrdquo of surroundings ndash Whatrsquos ahead around ldquoout thererdquo
bull Allows interaction with environment ndash Robo-mower can ldquoseerdquo grass yard perimeter
bull Protection amp Self-Preservation ndash Safety Damage Prevention Stairwell sensor
bull Gives the robot capability to goal-seek ndash Find colorful objects seek goals explore
bull Makes robots ldquointerestingrdquo
Robot Sensor Layers bull Consider a Robotrsquos Functional Purpose
ndash Security extending human visibility cheap staff ndash Surveillance remote monitoring tele-presence ndash Exploration (dangerous or far away places) ndash Research amp development ndash Contests amusement fun ndash The Challenge of ldquoCan I do itrdquo
Robot Sensor Layers bull Lines of Defense (of the robot)
ndash Distant object detection (eg distance) ndash Area sensors (non-directional object presence) ndash Non-contact close proximity (a few inches) ndash Physical contact detection (collision detection)
Sensors - What Can Be Sensed
Just about anythinghellip But how
The Ideal Sensorhellip bull Responds from DC to light bull Detects all electrostatic amp electromagnetic radiation bull Can measure anything with infinite resolution
bull Is cheap plentiful easy to use indestructible
bull Can easily discriminatefilter anything desired
bull Produces data thatrsquos easy to analyze
bull Can measure everything with absolute accuracy
bull Does it allhellip
bull Is capable of analyzing its own data
The Ideal Sensorhellip
Unfortunately DOESNrsquoT EXISThellipYET
Sensors - What Can Be Sensed bull Light (visible amp invisible)
ndash Presence color intensity content (mod) direction bull Sound (audible amp inaudible)
ndash Presence frequency intensity content (mod) direction bull Heat (invisible light)
ndash Temperature wavelength magnitude direction bull Chemicals
ndash Presence concentration identity etc bull Object Proximity
ndash Presenceabsence distance bearing color etc bull Physical orientationattitudeposition
ndash Magnitude pitch roll yaw coordinates etc
Sensors - What Can Be Sensed
bull Magnetic (B-Field) amp Electric (E-Field) Fields ndash Presence magnitude (int) orientation content (mod)
bull ResistanceConductivity (indirectly via E or I) ndash Presence magnitude variation etc
bull Capacitance (indirectly via excitationoscillation) ndash Presence magnitude variationetc
bull Inductance (indirectly via excitationoscillation) ndash Presence magnitude variation etc
bull Other Things
Passive vs Active Sensors
bull Sensor are usually part of a ldquosystemrdquo ndash Electronics make them work
bull Passive ndash Sits (passively) amp listens or watches ndash Photo-sensors microphones etc
bull Active ndash emits something looks for reflections ndash Ultrasonic laser ranger etc
What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Robot Sensors - Objectives
bull Show a lot of examples bull Try to explain how they work bull Reference Encoder articles bull Point to vendor websites bull Encourage research bull Encourage sensor experimentation bull Move very quickly
What is a Sensor
bull A device that converts one thing to another
bull A device that produces an electrical response to some external stimulus
bull Something that responds to the environment
bull An electronic device that measures amp quantifies something by converting it into a measureable electronic signal
bull A transducer
Why Do Robots Need Sensors
bull Provides ldquoawarenessrdquo of surroundings ndash Whatrsquos ahead around ldquoout thererdquo
bull Allows interaction with environment ndash Robo-mower can ldquoseerdquo grass yard perimeter
bull Protection amp Self-Preservation ndash Safety Damage Prevention Stairwell sensor
bull Gives the robot capability to goal-seek ndash Find colorful objects seek goals explore
bull Makes robots ldquointerestingrdquo
Robot Sensor Layers bull Consider a Robotrsquos Functional Purpose
ndash Security extending human visibility cheap staff ndash Surveillance remote monitoring tele-presence ndash Exploration (dangerous or far away places) ndash Research amp development ndash Contests amusement fun ndash The Challenge of ldquoCan I do itrdquo
Robot Sensor Layers bull Lines of Defense (of the robot)
ndash Distant object detection (eg distance) ndash Area sensors (non-directional object presence) ndash Non-contact close proximity (a few inches) ndash Physical contact detection (collision detection)
Sensors - What Can Be Sensed
Just about anythinghellip But how
The Ideal Sensorhellip bull Responds from DC to light bull Detects all electrostatic amp electromagnetic radiation bull Can measure anything with infinite resolution
bull Is cheap plentiful easy to use indestructible
bull Can easily discriminatefilter anything desired
bull Produces data thatrsquos easy to analyze
bull Can measure everything with absolute accuracy
bull Does it allhellip
bull Is capable of analyzing its own data
The Ideal Sensorhellip
Unfortunately DOESNrsquoT EXISThellipYET
Sensors - What Can Be Sensed bull Light (visible amp invisible)
ndash Presence color intensity content (mod) direction bull Sound (audible amp inaudible)
ndash Presence frequency intensity content (mod) direction bull Heat (invisible light)
ndash Temperature wavelength magnitude direction bull Chemicals
ndash Presence concentration identity etc bull Object Proximity
ndash Presenceabsence distance bearing color etc bull Physical orientationattitudeposition
ndash Magnitude pitch roll yaw coordinates etc
Sensors - What Can Be Sensed
bull Magnetic (B-Field) amp Electric (E-Field) Fields ndash Presence magnitude (int) orientation content (mod)
bull ResistanceConductivity (indirectly via E or I) ndash Presence magnitude variation etc
bull Capacitance (indirectly via excitationoscillation) ndash Presence magnitude variationetc
bull Inductance (indirectly via excitationoscillation) ndash Presence magnitude variation etc
bull Other Things
Passive vs Active Sensors
bull Sensor are usually part of a ldquosystemrdquo ndash Electronics make them work
bull Passive ndash Sits (passively) amp listens or watches ndash Photo-sensors microphones etc
bull Active ndash emits something looks for reflections ndash Ultrasonic laser ranger etc
What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

What is a Sensor
bull A device that converts one thing to another
bull A device that produces an electrical response to some external stimulus
bull Something that responds to the environment
bull An electronic device that measures amp quantifies something by converting it into a measureable electronic signal
bull A transducer
Why Do Robots Need Sensors
bull Provides ldquoawarenessrdquo of surroundings ndash Whatrsquos ahead around ldquoout thererdquo
bull Allows interaction with environment ndash Robo-mower can ldquoseerdquo grass yard perimeter
bull Protection amp Self-Preservation ndash Safety Damage Prevention Stairwell sensor
bull Gives the robot capability to goal-seek ndash Find colorful objects seek goals explore
bull Makes robots ldquointerestingrdquo
Robot Sensor Layers bull Consider a Robotrsquos Functional Purpose
ndash Security extending human visibility cheap staff ndash Surveillance remote monitoring tele-presence ndash Exploration (dangerous or far away places) ndash Research amp development ndash Contests amusement fun ndash The Challenge of ldquoCan I do itrdquo
Robot Sensor Layers bull Lines of Defense (of the robot)
ndash Distant object detection (eg distance) ndash Area sensors (non-directional object presence) ndash Non-contact close proximity (a few inches) ndash Physical contact detection (collision detection)
Sensors - What Can Be Sensed
Just about anythinghellip But how
The Ideal Sensorhellip bull Responds from DC to light bull Detects all electrostatic amp electromagnetic radiation bull Can measure anything with infinite resolution
bull Is cheap plentiful easy to use indestructible
bull Can easily discriminatefilter anything desired
bull Produces data thatrsquos easy to analyze
bull Can measure everything with absolute accuracy
bull Does it allhellip
bull Is capable of analyzing its own data
The Ideal Sensorhellip
Unfortunately DOESNrsquoT EXISThellipYET
Sensors - What Can Be Sensed bull Light (visible amp invisible)
ndash Presence color intensity content (mod) direction bull Sound (audible amp inaudible)
ndash Presence frequency intensity content (mod) direction bull Heat (invisible light)
ndash Temperature wavelength magnitude direction bull Chemicals
ndash Presence concentration identity etc bull Object Proximity
ndash Presenceabsence distance bearing color etc bull Physical orientationattitudeposition
ndash Magnitude pitch roll yaw coordinates etc
Sensors - What Can Be Sensed
bull Magnetic (B-Field) amp Electric (E-Field) Fields ndash Presence magnitude (int) orientation content (mod)
bull ResistanceConductivity (indirectly via E or I) ndash Presence magnitude variation etc
bull Capacitance (indirectly via excitationoscillation) ndash Presence magnitude variationetc
bull Inductance (indirectly via excitationoscillation) ndash Presence magnitude variation etc
bull Other Things
Passive vs Active Sensors
bull Sensor are usually part of a ldquosystemrdquo ndash Electronics make them work
bull Passive ndash Sits (passively) amp listens or watches ndash Photo-sensors microphones etc
bull Active ndash emits something looks for reflections ndash Ultrasonic laser ranger etc
What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Why Do Robots Need Sensors
bull Provides ldquoawarenessrdquo of surroundings ndash Whatrsquos ahead around ldquoout thererdquo
bull Allows interaction with environment ndash Robo-mower can ldquoseerdquo grass yard perimeter
bull Protection amp Self-Preservation ndash Safety Damage Prevention Stairwell sensor
bull Gives the robot capability to goal-seek ndash Find colorful objects seek goals explore
bull Makes robots ldquointerestingrdquo
Robot Sensor Layers bull Consider a Robotrsquos Functional Purpose
ndash Security extending human visibility cheap staff ndash Surveillance remote monitoring tele-presence ndash Exploration (dangerous or far away places) ndash Research amp development ndash Contests amusement fun ndash The Challenge of ldquoCan I do itrdquo
Robot Sensor Layers bull Lines of Defense (of the robot)
ndash Distant object detection (eg distance) ndash Area sensors (non-directional object presence) ndash Non-contact close proximity (a few inches) ndash Physical contact detection (collision detection)
Sensors - What Can Be Sensed
Just about anythinghellip But how
The Ideal Sensorhellip bull Responds from DC to light bull Detects all electrostatic amp electromagnetic radiation bull Can measure anything with infinite resolution
bull Is cheap plentiful easy to use indestructible
bull Can easily discriminatefilter anything desired
bull Produces data thatrsquos easy to analyze
bull Can measure everything with absolute accuracy
bull Does it allhellip
bull Is capable of analyzing its own data
The Ideal Sensorhellip
Unfortunately DOESNrsquoT EXISThellipYET
Sensors - What Can Be Sensed bull Light (visible amp invisible)
ndash Presence color intensity content (mod) direction bull Sound (audible amp inaudible)
ndash Presence frequency intensity content (mod) direction bull Heat (invisible light)
ndash Temperature wavelength magnitude direction bull Chemicals
ndash Presence concentration identity etc bull Object Proximity
ndash Presenceabsence distance bearing color etc bull Physical orientationattitudeposition
ndash Magnitude pitch roll yaw coordinates etc
Sensors - What Can Be Sensed
bull Magnetic (B-Field) amp Electric (E-Field) Fields ndash Presence magnitude (int) orientation content (mod)
bull ResistanceConductivity (indirectly via E or I) ndash Presence magnitude variation etc
bull Capacitance (indirectly via excitationoscillation) ndash Presence magnitude variationetc
bull Inductance (indirectly via excitationoscillation) ndash Presence magnitude variation etc
bull Other Things
Passive vs Active Sensors
bull Sensor are usually part of a ldquosystemrdquo ndash Electronics make them work
bull Passive ndash Sits (passively) amp listens or watches ndash Photo-sensors microphones etc
bull Active ndash emits something looks for reflections ndash Ultrasonic laser ranger etc
What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Robot Sensor Layers bull Consider a Robotrsquos Functional Purpose
ndash Security extending human visibility cheap staff ndash Surveillance remote monitoring tele-presence ndash Exploration (dangerous or far away places) ndash Research amp development ndash Contests amusement fun ndash The Challenge of ldquoCan I do itrdquo
Robot Sensor Layers bull Lines of Defense (of the robot)
ndash Distant object detection (eg distance) ndash Area sensors (non-directional object presence) ndash Non-contact close proximity (a few inches) ndash Physical contact detection (collision detection)
Sensors - What Can Be Sensed
Just about anythinghellip But how
The Ideal Sensorhellip bull Responds from DC to light bull Detects all electrostatic amp electromagnetic radiation bull Can measure anything with infinite resolution
bull Is cheap plentiful easy to use indestructible
bull Can easily discriminatefilter anything desired
bull Produces data thatrsquos easy to analyze
bull Can measure everything with absolute accuracy
bull Does it allhellip
bull Is capable of analyzing its own data
The Ideal Sensorhellip
Unfortunately DOESNrsquoT EXISThellipYET
Sensors - What Can Be Sensed bull Light (visible amp invisible)
ndash Presence color intensity content (mod) direction bull Sound (audible amp inaudible)
ndash Presence frequency intensity content (mod) direction bull Heat (invisible light)
ndash Temperature wavelength magnitude direction bull Chemicals
ndash Presence concentration identity etc bull Object Proximity
ndash Presenceabsence distance bearing color etc bull Physical orientationattitudeposition
ndash Magnitude pitch roll yaw coordinates etc
Sensors - What Can Be Sensed
bull Magnetic (B-Field) amp Electric (E-Field) Fields ndash Presence magnitude (int) orientation content (mod)
bull ResistanceConductivity (indirectly via E or I) ndash Presence magnitude variation etc
bull Capacitance (indirectly via excitationoscillation) ndash Presence magnitude variationetc
bull Inductance (indirectly via excitationoscillation) ndash Presence magnitude variation etc
bull Other Things
Passive vs Active Sensors
bull Sensor are usually part of a ldquosystemrdquo ndash Electronics make them work
bull Passive ndash Sits (passively) amp listens or watches ndash Photo-sensors microphones etc
bull Active ndash emits something looks for reflections ndash Ultrasonic laser ranger etc
What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Robot Sensor Layers bull Lines of Defense (of the robot)
ndash Distant object detection (eg distance) ndash Area sensors (non-directional object presence) ndash Non-contact close proximity (a few inches) ndash Physical contact detection (collision detection)
Sensors - What Can Be Sensed
Just about anythinghellip But how
The Ideal Sensorhellip bull Responds from DC to light bull Detects all electrostatic amp electromagnetic radiation bull Can measure anything with infinite resolution
bull Is cheap plentiful easy to use indestructible
bull Can easily discriminatefilter anything desired
bull Produces data thatrsquos easy to analyze
bull Can measure everything with absolute accuracy
bull Does it allhellip
bull Is capable of analyzing its own data
The Ideal Sensorhellip
Unfortunately DOESNrsquoT EXISThellipYET
Sensors - What Can Be Sensed bull Light (visible amp invisible)
ndash Presence color intensity content (mod) direction bull Sound (audible amp inaudible)
ndash Presence frequency intensity content (mod) direction bull Heat (invisible light)
ndash Temperature wavelength magnitude direction bull Chemicals
ndash Presence concentration identity etc bull Object Proximity
ndash Presenceabsence distance bearing color etc bull Physical orientationattitudeposition
ndash Magnitude pitch roll yaw coordinates etc
Sensors - What Can Be Sensed
bull Magnetic (B-Field) amp Electric (E-Field) Fields ndash Presence magnitude (int) orientation content (mod)
bull ResistanceConductivity (indirectly via E or I) ndash Presence magnitude variation etc
bull Capacitance (indirectly via excitationoscillation) ndash Presence magnitude variationetc
bull Inductance (indirectly via excitationoscillation) ndash Presence magnitude variation etc
bull Other Things
Passive vs Active Sensors
bull Sensor are usually part of a ldquosystemrdquo ndash Electronics make them work
bull Passive ndash Sits (passively) amp listens or watches ndash Photo-sensors microphones etc
bull Active ndash emits something looks for reflections ndash Ultrasonic laser ranger etc
What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors - What Can Be Sensed
Just about anythinghellip But how
The Ideal Sensorhellip bull Responds from DC to light bull Detects all electrostatic amp electromagnetic radiation bull Can measure anything with infinite resolution
bull Is cheap plentiful easy to use indestructible
bull Can easily discriminatefilter anything desired
bull Produces data thatrsquos easy to analyze
bull Can measure everything with absolute accuracy
bull Does it allhellip
bull Is capable of analyzing its own data
The Ideal Sensorhellip
Unfortunately DOESNrsquoT EXISThellipYET
Sensors - What Can Be Sensed bull Light (visible amp invisible)
ndash Presence color intensity content (mod) direction bull Sound (audible amp inaudible)
ndash Presence frequency intensity content (mod) direction bull Heat (invisible light)
ndash Temperature wavelength magnitude direction bull Chemicals
ndash Presence concentration identity etc bull Object Proximity
ndash Presenceabsence distance bearing color etc bull Physical orientationattitudeposition
ndash Magnitude pitch roll yaw coordinates etc
Sensors - What Can Be Sensed
bull Magnetic (B-Field) amp Electric (E-Field) Fields ndash Presence magnitude (int) orientation content (mod)
bull ResistanceConductivity (indirectly via E or I) ndash Presence magnitude variation etc
bull Capacitance (indirectly via excitationoscillation) ndash Presence magnitude variationetc
bull Inductance (indirectly via excitationoscillation) ndash Presence magnitude variation etc
bull Other Things
Passive vs Active Sensors
bull Sensor are usually part of a ldquosystemrdquo ndash Electronics make them work
bull Passive ndash Sits (passively) amp listens or watches ndash Photo-sensors microphones etc
bull Active ndash emits something looks for reflections ndash Ultrasonic laser ranger etc
What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

The Ideal Sensorhellip bull Responds from DC to light bull Detects all electrostatic amp electromagnetic radiation bull Can measure anything with infinite resolution
bull Is cheap plentiful easy to use indestructible
bull Can easily discriminatefilter anything desired
bull Produces data thatrsquos easy to analyze
bull Can measure everything with absolute accuracy
bull Does it allhellip
bull Is capable of analyzing its own data
The Ideal Sensorhellip
Unfortunately DOESNrsquoT EXISThellipYET
Sensors - What Can Be Sensed bull Light (visible amp invisible)
ndash Presence color intensity content (mod) direction bull Sound (audible amp inaudible)
ndash Presence frequency intensity content (mod) direction bull Heat (invisible light)
ndash Temperature wavelength magnitude direction bull Chemicals
ndash Presence concentration identity etc bull Object Proximity
ndash Presenceabsence distance bearing color etc bull Physical orientationattitudeposition
ndash Magnitude pitch roll yaw coordinates etc
Sensors - What Can Be Sensed
bull Magnetic (B-Field) amp Electric (E-Field) Fields ndash Presence magnitude (int) orientation content (mod)
bull ResistanceConductivity (indirectly via E or I) ndash Presence magnitude variation etc
bull Capacitance (indirectly via excitationoscillation) ndash Presence magnitude variationetc
bull Inductance (indirectly via excitationoscillation) ndash Presence magnitude variation etc
bull Other Things
Passive vs Active Sensors
bull Sensor are usually part of a ldquosystemrdquo ndash Electronics make them work
bull Passive ndash Sits (passively) amp listens or watches ndash Photo-sensors microphones etc
bull Active ndash emits something looks for reflections ndash Ultrasonic laser ranger etc
What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-
The Ideal Sensorhellip
Unfortunately DOESNrsquoT EXISThellipYET
Sensors - What Can Be Sensed bull Light (visible amp invisible)
ndash Presence color intensity content (mod) direction bull Sound (audible amp inaudible)
ndash Presence frequency intensity content (mod) direction bull Heat (invisible light)
ndash Temperature wavelength magnitude direction bull Chemicals
ndash Presence concentration identity etc bull Object Proximity
ndash Presenceabsence distance bearing color etc bull Physical orientationattitudeposition
ndash Magnitude pitch roll yaw coordinates etc
Sensors - What Can Be Sensed
bull Magnetic (B-Field) amp Electric (E-Field) Fields ndash Presence magnitude (int) orientation content (mod)
bull ResistanceConductivity (indirectly via E or I) ndash Presence magnitude variation etc
bull Capacitance (indirectly via excitationoscillation) ndash Presence magnitude variationetc
bull Inductance (indirectly via excitationoscillation) ndash Presence magnitude variation etc
bull Other Things
Passive vs Active Sensors
bull Sensor are usually part of a ldquosystemrdquo ndash Electronics make them work
bull Passive ndash Sits (passively) amp listens or watches ndash Photo-sensors microphones etc
bull Active ndash emits something looks for reflections ndash Ultrasonic laser ranger etc
What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-
Sensors - What Can Be Sensed bull Light (visible amp invisible)
ndash Presence color intensity content (mod) direction bull Sound (audible amp inaudible)
ndash Presence frequency intensity content (mod) direction bull Heat (invisible light)
ndash Temperature wavelength magnitude direction bull Chemicals
ndash Presence concentration identity etc bull Object Proximity
ndash Presenceabsence distance bearing color etc bull Physical orientationattitudeposition
ndash Magnitude pitch roll yaw coordinates etc
Sensors - What Can Be Sensed
bull Magnetic (B-Field) amp Electric (E-Field) Fields ndash Presence magnitude (int) orientation content (mod)
bull ResistanceConductivity (indirectly via E or I) ndash Presence magnitude variation etc
bull Capacitance (indirectly via excitationoscillation) ndash Presence magnitude variationetc
bull Inductance (indirectly via excitationoscillation) ndash Presence magnitude variation etc
bull Other Things
Passive vs Active Sensors
bull Sensor are usually part of a ldquosystemrdquo ndash Electronics make them work
bull Passive ndash Sits (passively) amp listens or watches ndash Photo-sensors microphones etc
bull Active ndash emits something looks for reflections ndash Ultrasonic laser ranger etc
What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors - What Can Be Sensed
bull Magnetic (B-Field) amp Electric (E-Field) Fields ndash Presence magnitude (int) orientation content (mod)
bull ResistanceConductivity (indirectly via E or I) ndash Presence magnitude variation etc
bull Capacitance (indirectly via excitationoscillation) ndash Presence magnitude variationetc
bull Inductance (indirectly via excitationoscillation) ndash Presence magnitude variation etc
bull Other Things
Passive vs Active Sensors
bull Sensor are usually part of a ldquosystemrdquo ndash Electronics make them work
bull Passive ndash Sits (passively) amp listens or watches ndash Photo-sensors microphones etc
bull Active ndash emits something looks for reflections ndash Ultrasonic laser ranger etc
What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Passive vs Active Sensors
bull Sensor are usually part of a ldquosystemrdquo ndash Electronics make them work
bull Passive ndash Sits (passively) amp listens or watches ndash Photo-sensors microphones etc
bull Active ndash emits something looks for reflections ndash Ultrasonic laser ranger etc
What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

What Sensors Are Out There
bull Feelers (Whiskers Bumpers) ndash Mechanical bull ResistiveCapacitiveInductive ndash Active amp Passive bull Photoelectric (Visible) ndash Active amp Passive bull Infrared (light) ndash Active amp Passive bull Ultrasonic (sound) ndash Active amp Passive bull Sonic ndash Active amp Passive
What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

What Sensors Are Out There bull Visual ndash Cameras amp Arrays (Active amp Passive) bull Color Sensors (Active amp Passive) bull Magnetic (Active amp Passive) bull Inertial (Pitch Roll Yaw) bull Position (GPS location altitude) bull Compass (orientation bearing) bull Voltage ndash Electric Field Sensors bull Current ndash Magnetic Field Sensors bull Chemical ndash Smoke Detectors Gas Sensors
A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

A Closer Lookhellip
Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Feelers - Bumpers amp Guards
From Kevin Rossrsquos ldquoGetting Started Articlerdquo (SRS Website)
Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Feelers - Bumpers amp Guards
Specifications bullPhosphors bronze springs bullFeather touch operation bullOperates on any voltage bullMaximum current limit 330mA bull8 pin Dual in line MampF BERG sockets included
From Nex-Roboticscom
Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Feelers - Bumpers amp Guards
bullOutput response approximately logarithmic bullStandard sensor is very flexible bullSimple interface circuits bufferamplifylinearize bullDirect connection to uC ADC input feasible
From FlexPointcom
Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash IR bull Active (emitting)
ndash Oscillator generates IR reflections off objects ndash Optical amp electrical filtering of reflections ndash Pulses may be encoded for better discrimination ndash Typically frequencies around 40KHz ndash Doesnrsquot work well with dark flat-colored objects ndash Light easily reflects away from sensor
bull Passive (sensor only)
ndash Pyro-electric (heat sensor) ndash Look for IR emissions from people amp animals ndash Used in security systems amp motion detectors
Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Infrared - Active
$30 from Lynxmotion
July 99 Encoder
Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Linear Array IR Range Sensors bull Sharp GP2Dxx (one of many) bull ~few to gt500cm Ranges bull Fixed range wdiscrete or analog output bull Non-linear output-to-distance bull Use 1distance to linearize bull Easy to Use wSRSWR
$20 from Acronamecom
Also Nex-Roboticscom
Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Laser Range Sensors
bull USB amp RS232 Interfaces bull 240ordm Field of View bull 036ordm Angular Resolution bull 10Hz Refresh Rate bull 20mm to 4m bull $2375 (cool but pricey)
from Acronamecom
Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Passive IR ndash Pyro-Electric $20 from ElectronicKitscom
Also Nex-Roboticscom Specifications bullL 3 W 1-78 H 1-12 bullPower 9 - 12 VDC 300 mA bullRange Up to 18 feet bullMovement Sensitivity Adj bullLight sensitivity Adj for DayNight use bullExit delay option bullAlarm on-time Adj bullLED indicator when motion is detected
Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Ultrasonic bull Active
ndash Emit pulses amp listen for echos ndash Times round trip sound travel (~1ftmS) ndash Reaches far fairly beyond robot (inches to 30-50rsquo) ndash Relatively simple not cheap analog output ndash Directional not everything reflects sound well
bull Passive (listens only)
ndash Sensor listens for ultrasonic sounds ndash Electronics may translate frequency or modulation ndash Software may perform signal analysis (FFTs etc)
Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Ultrasonic - Active
$27
$134 $49
acronamecom for more information about these amp other products
Search the web for ldquopolaroid ultrasonic sensorrdquo for hacking info on these circuits
Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Resistance
bull Passive (sensor only) ndash Measures elec resistance between objects ndash Measure sensor that varies resistance ndash Use absolute values ndash Use differential readings (from reference) ndash Other ideas
Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Capacitive
bull Passive ndash Only detects ldquoenergizedldquo sources or objects ndash Sensor needs amplification amp filtering
bull Active (emitting)
ndash Generate AC or DC voltage ndash Apply to external environment ndash Measure current to determine Resistance ndash Short range applications
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors -Capaciflector
httpwwwedcheungcomjobhrsdmcaphtm
Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors - Inductive bull Passive
ndash Only detects energized (current flow) ldquosourcesrdquo
ndash Sensor needs ampl amp filtering ndash Sens to B-field orientation
bull Active (emitting) ndash Metals affect sensor ndash Current flows through inductor ndash Magnetic field mostly ignores non-metals ndash Inductance changes with metallic proximity ndash Short range applications (~cm or mm)
Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Visual
bull Active (emitting) ndash Camera with field of view illumination ndash Looks for particular reflections ndash Filter removes non-significant light sources ndash Linear array senses single axis of motion
bull Passive (camera only)
ndash Scans field of interest ndash Looks for objects artifacts features of interest ndash Processes digital data to simplified interpretation
Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Visual
bull CMUCam bull Linear Optical Array
Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Visual
Kinect bull Color Camera bull IR EmitterDetector bull Four Microphones bull DC Accelerometer
Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Visual - Kinect Inside the case
bullAn RGB camera stores three channel data at 1280x960 resolution
bullAn infrared (IR) emitter and an IR depth sensor
bullA multi-array microphone (four provide source direction)
bullA 3-axis accelerometer to determine the current orientation of the Kinect
Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Visual - Kinect
Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Color bull Active (emitting)
ndash Selective field illumination (specific color(s)) ndash Sensor is calibrated for each color ndash Sensor filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
bull Passive (sensors only)
ndash Different sensors for different colors ndash Color filter removes extraneous light sources ndash Output can be analog (prop) or digital (onoff)
Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Color
httprobotroomcomColorSensorhtml
bullActivate one LED at a time bullMeasure the photocell resp to reflection bullRepeat for all LEDs bullCompare individual readings with table
Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Magnetic
bull Active (emitting) ndash Metal detectors ndash Follows metallic strips on or under the floor ndash Magnetometer ndash Magnetic Resonance Imaging (MRI)
bull Passive (sensors only) ndash Compass ndash Magnetic field sensor (rarroscillating current) ndash Coil
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-
Sensors ndash Orientation
bull Rate Gyros ndash Output proportional to angular rotational speed ndash Integrate to get position ndash Differentiate to get angular acceleration ndash Use to control dynamic motion (eg balance)
bull DC Accelerometer
ndash Minimum output when perpendicular to gravity ndash Maximum output when parallel to gravity ndash Output proportional to sine of vertical angle
Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Motion Rate Gyro ndash Silicon Sensing Systems Servo Accel ndash SensorLandcom
Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash PositionLocation bull Rotary Sensors amp Encoders
ndash Relative amp absolute position amp motion ndash Quadrature outputs for speed amp direction ndash IntegrateDifferentiate for other parameters ndash RVDTs (analog output proportional to angle)
httpwebstoremelexiscommlxstoreaspfamily=MLX90316
Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Wheel Encoders
bull Nuboticscom $27 bull Jun 98 Oct 2000 Encoder
Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash PositionLocation bull Global Positioning System
ndash Absolute positionlocationelevation on earth ndash Local differential error correction ndash IntegrateDifferentiate for other parameters ndash Use compass for static orientation
Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Compass (Orientation)
bull Track bearing amp distance to determine position bull L Parallaxcom $30 bull R DinsmoreSensorscom $13-$37
Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Compass (Orientation)
bull Measure bearing to determine position bull From Robot-Electronicscouk bull From RoboticsConnectioncom
bullVoltage 5V only Required bullCurrent 20 mA Typical bullResolution 01 Degree bullAccuracy 3-4ordm approx after cal bullOutput 1 Timing Pulse 1mS to 37mS in 01mS inc bullOutput 2 I2C Interface 0-255 (0-3599) bullSCL speed up to 1MHz bullSize 126 x 138 in bull32 x 35 mm
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-
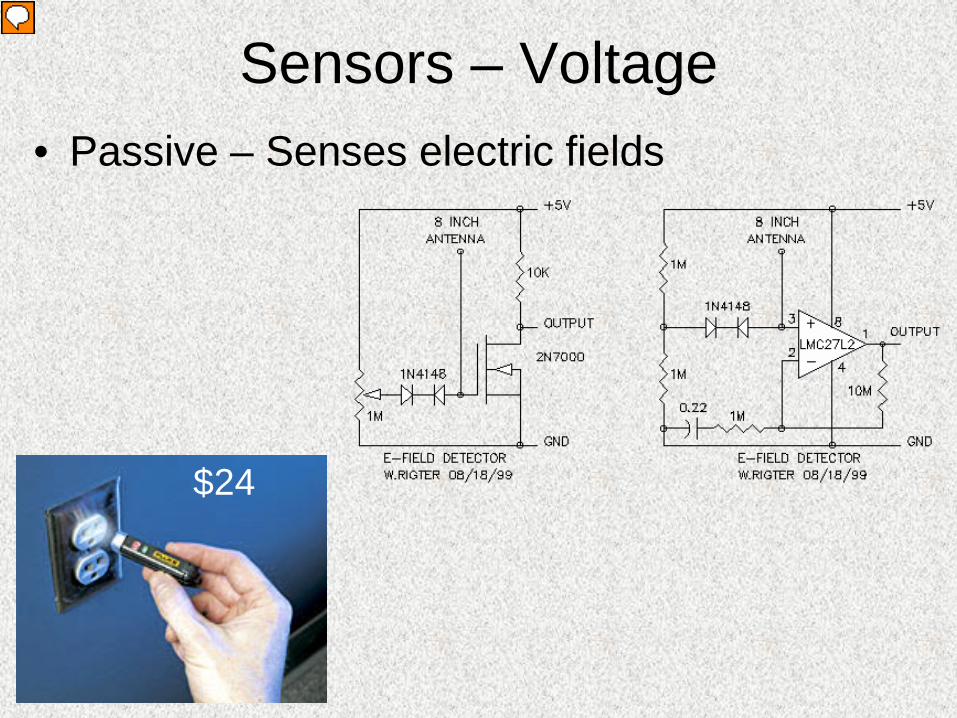
Sensors ndash Voltage bull Passive ndash Senses electric fields
$24
Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Current
Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Current
Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Chemical
bull Passive (sensors only) ndash Sensor must be energize amp amplified ndash Requires flow of chemical past sensor ndash Carbonizes gas as it passes
bull Active (optical emitterphoto sensor)
ndash Emits beam into path of chemicalparticles ndash Requires flow of chemical past sensor
Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Chemical bull Detect ammonia CO methane combustible gasses bull Conductivity increases with gas concentration in the air bull Sensors that detect carbon atoms bull Use a heater to ldquoburnrdquo gas bull Downside Eventually ldquoplugs uprdquo
Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Chemical
Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors ndash Chemical bull Smoke Detectors - Cheap readily available $5 bull Can use radioactive to ionize smoke particles in the air bull Can use optical reflection from smoke particles in the air bull Oxygen concentration sensors - CO H4S CH4 pricey bull See HowStuffWorkscom
Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Parallax Sensor Sampler - $159 bull Memsic 2125 Accelerometer bull Sensirion Temperature and Humidity Sensor bull Flexiforce Demo Kit bull PING))) Ultrasonic Sensor bull PIR Sensor (ldquoheatrdquo sensor) bull Hitachi HM55B Compass Module bull Hitachi H48C Tri-Axis Accelerometer Module bull Piezo Film Vibra-Tab Mass bull TCS230-DB Color Sensor
bull Parallaxcom
Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Parallax Sensor Sampler - $159
Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Interfacing to Analog Sensors bull Wire to sensors amp electronics bull Energize sensor electronics (locally or remotely) bull Route analog signal controlled by sensor bull Buffer amp amplify analog signal bull Isolate remove DC offsets single-end signal bull Feed to ADC or uController analog input
bull Atmelcom
Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Instrumentation Amplifiers
bull Gain=1+(2R1)Rgain
bull Linearcom amp Maxim-iccom (free to $$)
Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Instrumentation Amplifiers
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-
Robot Sensors - Summary bull What are sensors bull Why do robots need them bull Implementing sensor layers bull What can be sensed bull What sensors are out there (some) bull How do they work bull How much they cost bull How to interface to them
Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensorshellip Conclusion bull There are lots of them bull Almost anything can be sensed bull Provide for human amp robot protection bull Enable goal-seeking (finding things) bull Enable closed-loop interaction (approaching) bull Make robots interesting (amp fun) bull Make programming ldquochallengingrdquo bull Lots of data to process amp interpret bull Are pretty cool
Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensor VendorInfo Links
httpwwwacronamecom httpwwwdinsmoresensorscom httpwwwelectronickitscom httpwwwflukecom httpwwwhowstuffworkscom http wwwlynxmotioncom httpwwwmagnetometerorg httpwwwnex-roboticscom http wwwnuboticscom httpwwwraztecconz
Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensor VendorInfo Links
http wwwroboticscom httpwwwroboticsconnectioncom httpwwwrobotroomcom httpwwwsensorlandcom httpwwwsensorsmagcom httpwwwseattleroboticsorgencoder httpwwwseattleroboticsorgencoderindex-oldhtml httpwwwsolarboticscom httpwwwsynkeracom httpwwwtedlarsoncom
Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-

Sensors
QampA Comments amp Discussion
- Robot SensorsAn Overview
- Steve Kaehler - Who Am I
- Robot Sensors - Outline
- Robot Sensors - Objectives
- What is a Sensor
- Why Do Robots Need Sensors
- Robot Sensor Layers
- Robot Sensor Layers
- Sensors - What Can Be Sensed
- The Ideal Sensorhellip
- The Ideal Sensorhellip
- Sensors - What Can Be Sensed
- Sensors - What Can Be Sensed
- Passive vs Active Sensors
- What Sensors Are Out There
- What Sensors Are Out There
- A Closer Lookhellip
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Feelers - Bumpers amp Guards
- Sensors ndash IR
- Infrared - Active
- Linear Array IR Range Sensors
- Laser Range Sensors
- Passive IR ndash Pyro-Electric
- Sensors ndash Ultrasonic
- Ultrasonic - Active
- Sensors ndash Resistance
- Sensors ndash Capacitive
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors -Capaciflector
- Sensors - Inductive
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual
- Sensors ndash Visual - Kinect
- Sensors ndash Visual - Kinect
- Sensors ndash Color
- Sensors ndash Color
- Sensors ndash Magnetic
- Sensors ndash Orientation
- Sensors ndash Motion
- Sensors ndash PositionLocation
- Wheel Encoders
- Sensors ndash PositionLocation
- Sensors ndash Compass (Orientation)
- Sensors ndash Compass (Orientation)
- Sensors ndash Voltage
- Sensors ndash Current
- Sensors ndash Current
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Sensors ndash Chemical
- Parallax Sensor Sampler - $159
- Parallax Sensor Sampler - $159
- Interfacing to Analog Sensors
- Instrumentation Amplifiers
- Instrumentation Amplifiers
- Robot Sensors - Summary
- Sensorshellip Conclusion
- Sensor VendorInfo Links
- Sensor VendorInfo Links
- SensorsQampAComments amp Discussion
-