robotique collaborative - carsat-nordpicardie.fr · collaborative cellule non collaborative absence...
TRANSCRIPT

Robotique collaborative
Prévention des TMS par les nouvelles technologies – 23/11/17
D. TIHAY

.2
Evolution du contexte de la robotique industrielle
23/11/2017
- Robot isolé - Espaces de travail distincts (hors maintenance…)
- Protection périmétriques physiques
- Arrêt du robot par coupure d’énergie
- Butées mécaniques
- Proximité de l’homme et du robot - Espace de travail commun
- Absence de protections périmétriques physiques
- Arrêt du robot sous énergie - Butées logicielles
.3
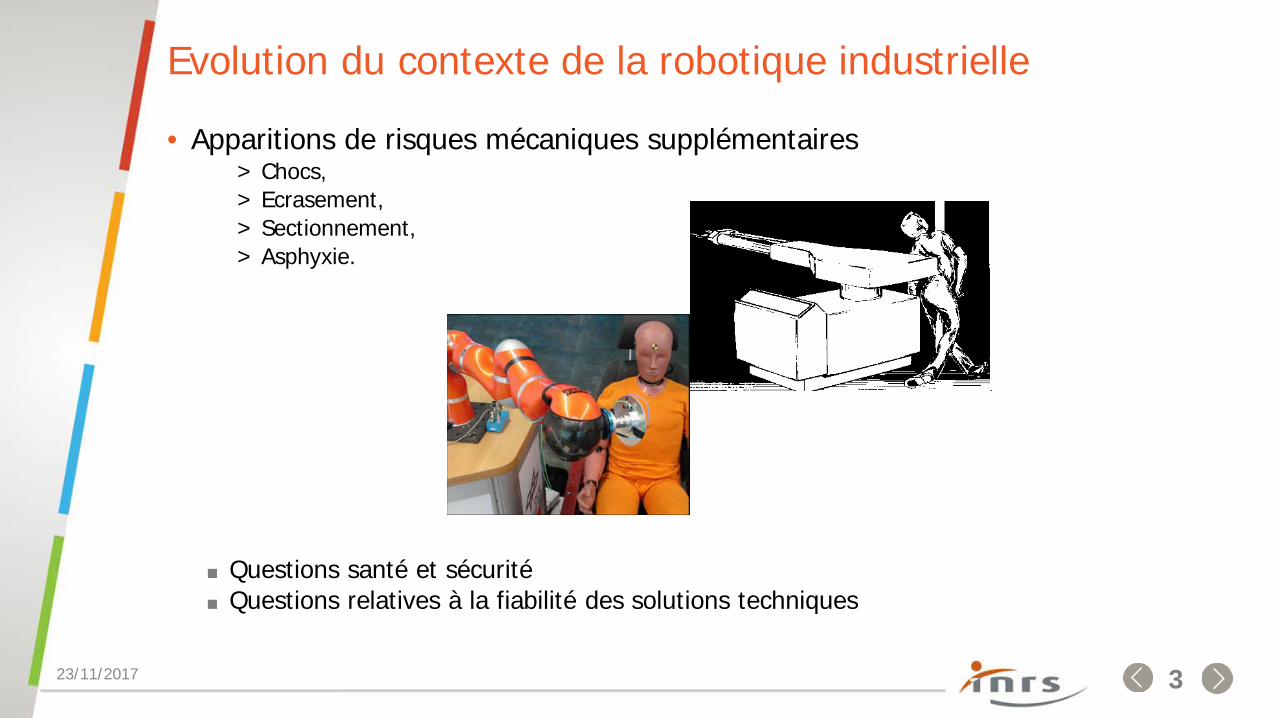
Evolution du contexte de la robotique industrielle
• Apparitions de risques mécaniques supplémentaires > Chocs, > Ecrasement, > Sectionnement, > Asphyxie.
Questions santé et sécurité Questions relatives à la fiabilité des solutions techniques
23/11/2017
.4
Contexte réglementaire et normatif
• Les robots industriels relèvent de la directive 2006/42/CE
Application des Exigences Essentielles de Santé et de Sécurité relatives à la conception et à la construction des machines
• Normes : NF EN ISO 10218-1 : Exigences de sécurité pour les robots industriels - Robots NF EN ISO 10218-2 : Exigences de sécurité pour les robots industriels – Systèmes
robots et intégration
ISO/TS 15066 : Spécification technique – Robots coopératifs
23/11/2017
.5
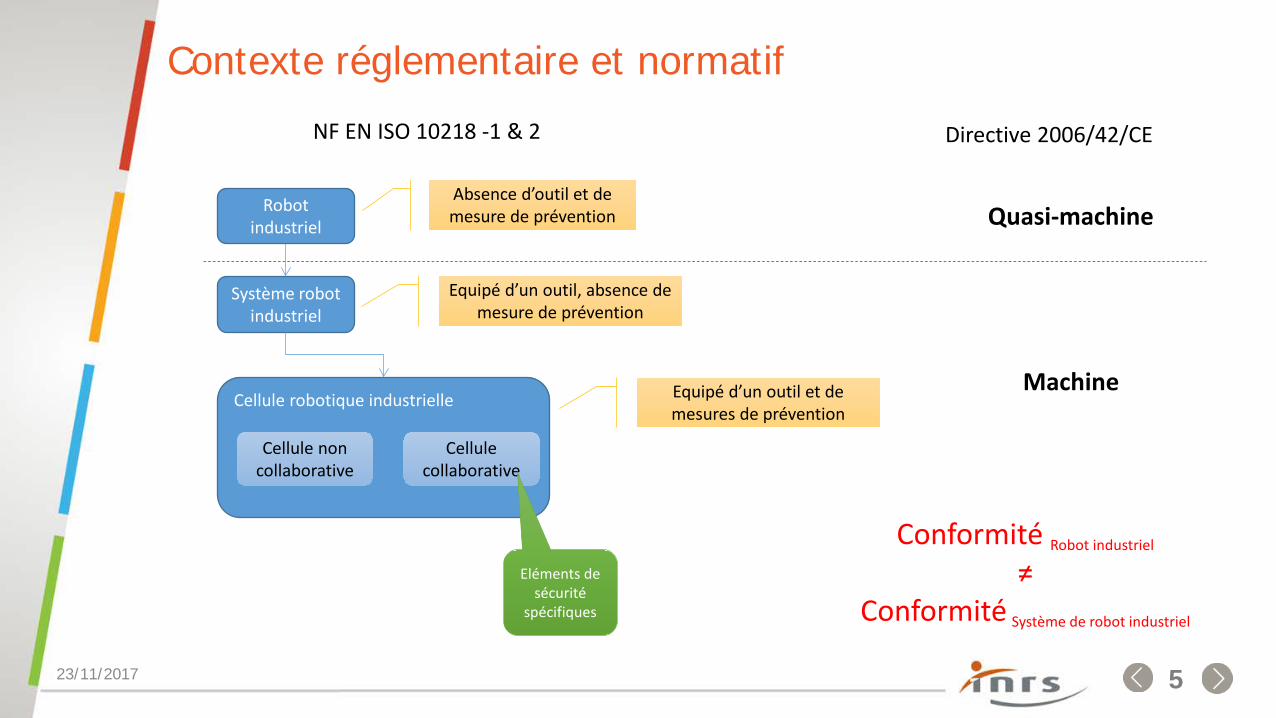
Contexte réglementaire et normatif
23/11/2017
Robot industriel
Système robot industriel
Cellule robotique industrielle
Cellule collaborative
Cellule non collaborative
Absence d’outil et de mesure de prévention
Equipé d’un outil, absence de mesure de prévention
Equipé d’un outil et de mesures de prévention
Eléments de sécurité
spécifiques
Directive 2006/42/CE
Quasi-machine
Machine
Conformité Robot industriel
≠ Conformité Système de robot industriel
NF EN ISO 10218 -1 & 2
.6
Robotique collaborative
• Norme NF EN ISO ISO 10218-1 envisage 4 modes de collaboration
Arrêt nominal de sécurité contrôlé (§5.10.2) Guidage Manuel (§5.10.3) Contrôle de la vitesse et de la distance de séparation (§5.10.4) Limitation de la puissance et de la force par conception ou par
commande (§5.10.5)
Combinaison possible de plusieurs modes
23/11/2017
.7
Robot collaboratif
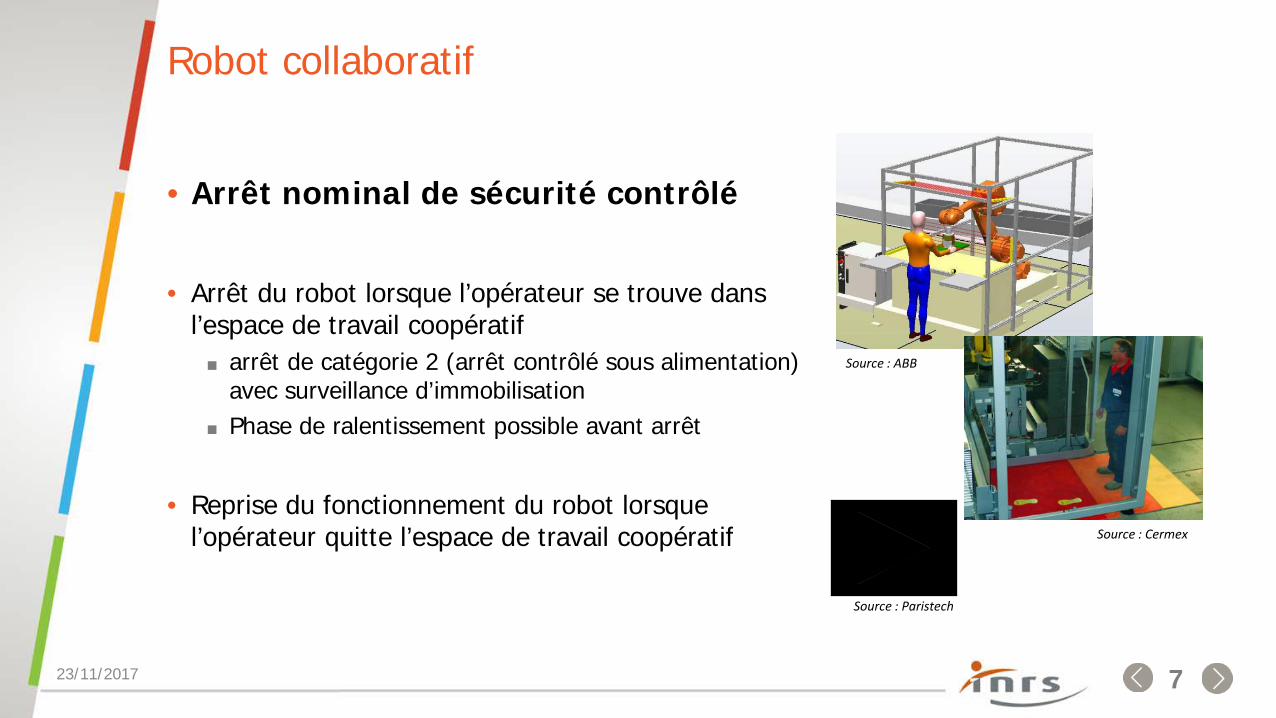
• Arrêt nominal de sécurité contrôlé
• Arrêt du robot lorsque l’opérateur se trouve dans
l’espace de travail coopératif arrêt de catégorie 2 (arrêt contrôlé sous alimentation)
avec surveillance d’immobilisation Phase de ralentissement possible avant arrêt
• Reprise du fonctionnement du robot lorsque l’opérateur quitte l’espace de travail coopératif
23/11/2017
Source : ABB
Source : Paristech
Source : Cermex
.8
Robot collaboratif
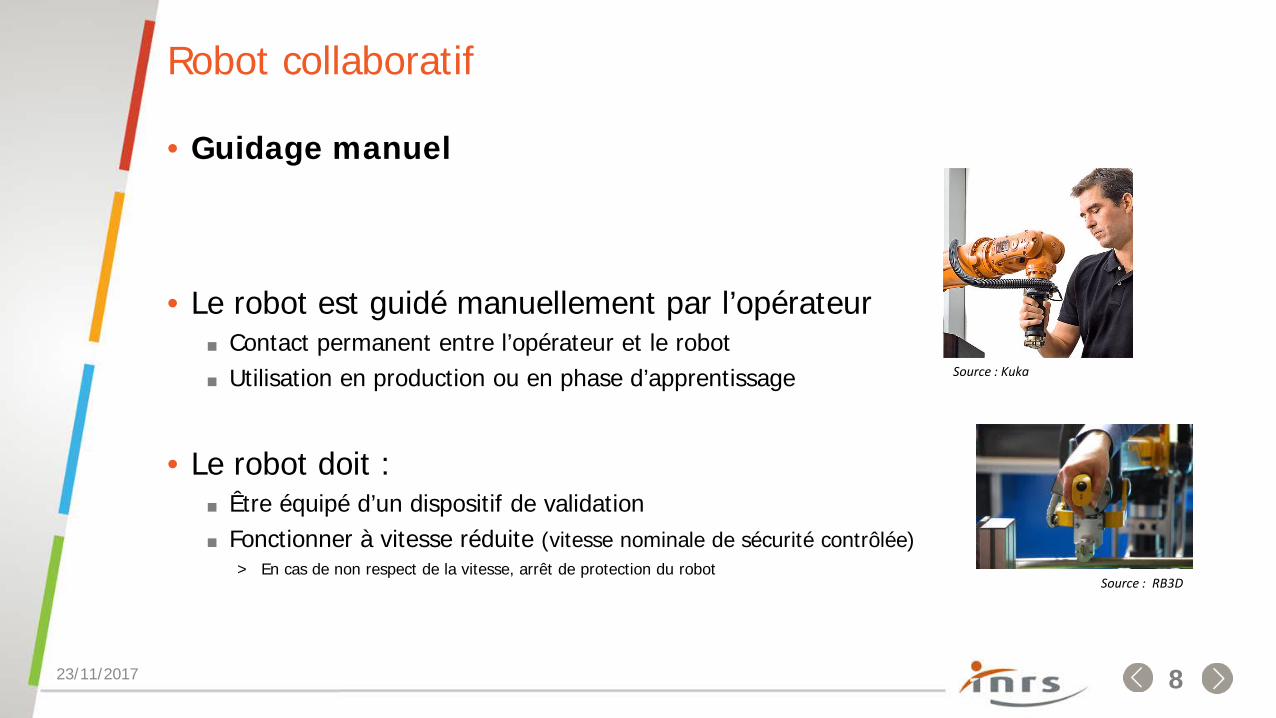
• Guidage manuel
• Le robot est guidé manuellement par l’opérateur Contact permanent entre l’opérateur et le robot Utilisation en production ou en phase d’apprentissage
• Le robot doit : Être équipé d’un dispositif de validation Fonctionner à vitesse réduite (vitesse nominale de sécurité contrôlée)
> En cas de non respect de la vitesse, arrêt de protection du robot
23/11/2017
Source : Kuka
Source : RB3D
.9
Robot collaboratif
• Contrôle de la vitesse et de la distance de séparation
• Maintien d’une vitesse déterminée
• Maintien d’une distance de séparation entre le robot et l’opérateur
En cas de non respect de la vitesse ou de la distance,
arrêt de protection du robot
23/11/2017
Source : Projet Saphari
• Aujourd’hui, pas de solutions industrielles fiables Détection de l’opérateur par module implanté sur le robot (technologie capacitive, ultrason …)
Détection et suivi de l’operateur par un module extérieur (caméra …)
.10
Robot collaboratif
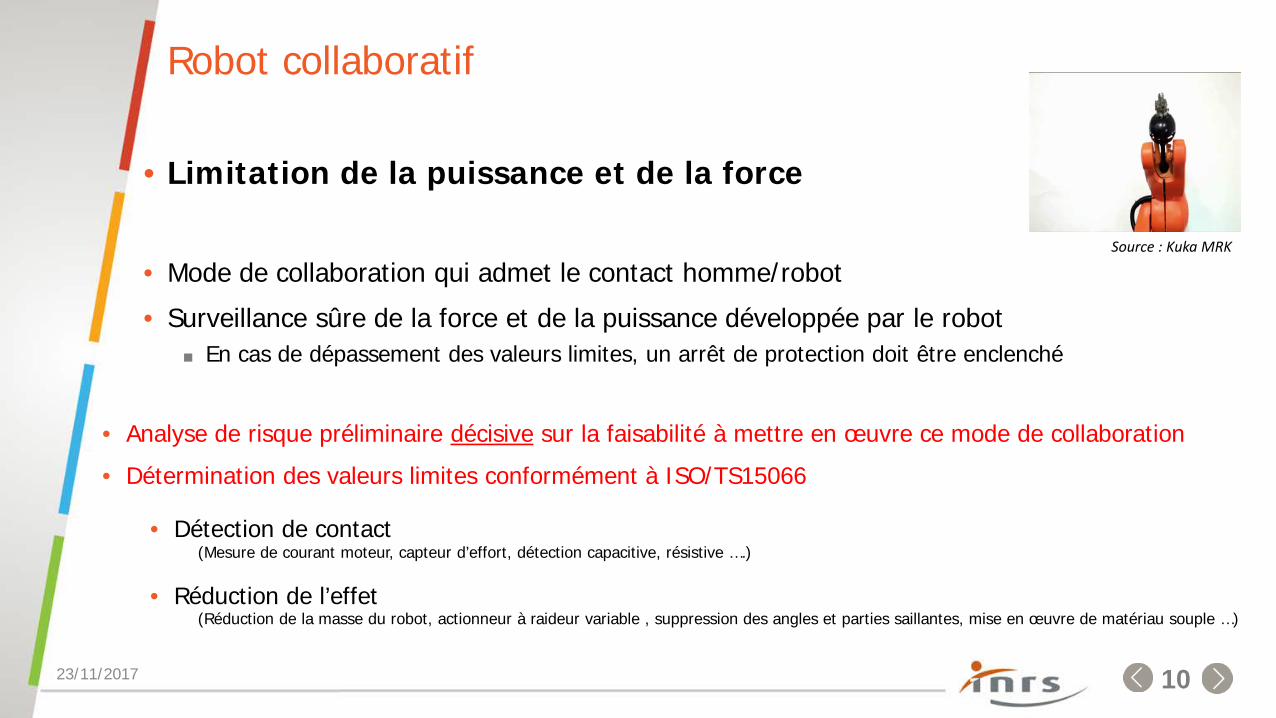
• Limitation de la puissance et de la force
• Mode de collaboration qui admet le contact homme/robot
• Surveillance sûre de la force et de la puissance développée par le robot En cas de dépassement des valeurs limites, un arrêt de protection doit être enclenché
23/11/2017
• Analyse de risque préliminaire décisive sur la faisabilité à mettre en œuvre ce mode de collaboration
• Détermination des valeurs limites conformément à ISO/TS15066
• Détection de contact (Mesure de courant moteur, capteur d’effort, détection capacitive, résistive ….)
• Réduction de l’effet (Réduction de la masse du robot, actionneur à raideur variable , suppression des angles et parties saillantes, mise en œuvre de matériau souple …)
Source : Kuka MRK
.11
Besoins des utilisateurs ?
• Recensement des pratiques industrielles Comment l’entreprise satisfait (ou pas) ses besoins de coactivité ?
• Identification des besoins de coactivité Origine du besoin Caractéristiques de la coactivité (nature, fréquence…)
• Analyse de la prise en compte des contraintes de l’entreprise L’entreprise a-t-elle identifié des contraintes inhérentes à la coactivité ? Est elle prête à les accepter ?
• Analyse de l’utilisabilité des moyens de préventions Confrontation des modes de collaboration et des besoins Confrontation des moyens de protection et des besoins
23/11/2017
.12
Besoins des utilisateurs ?
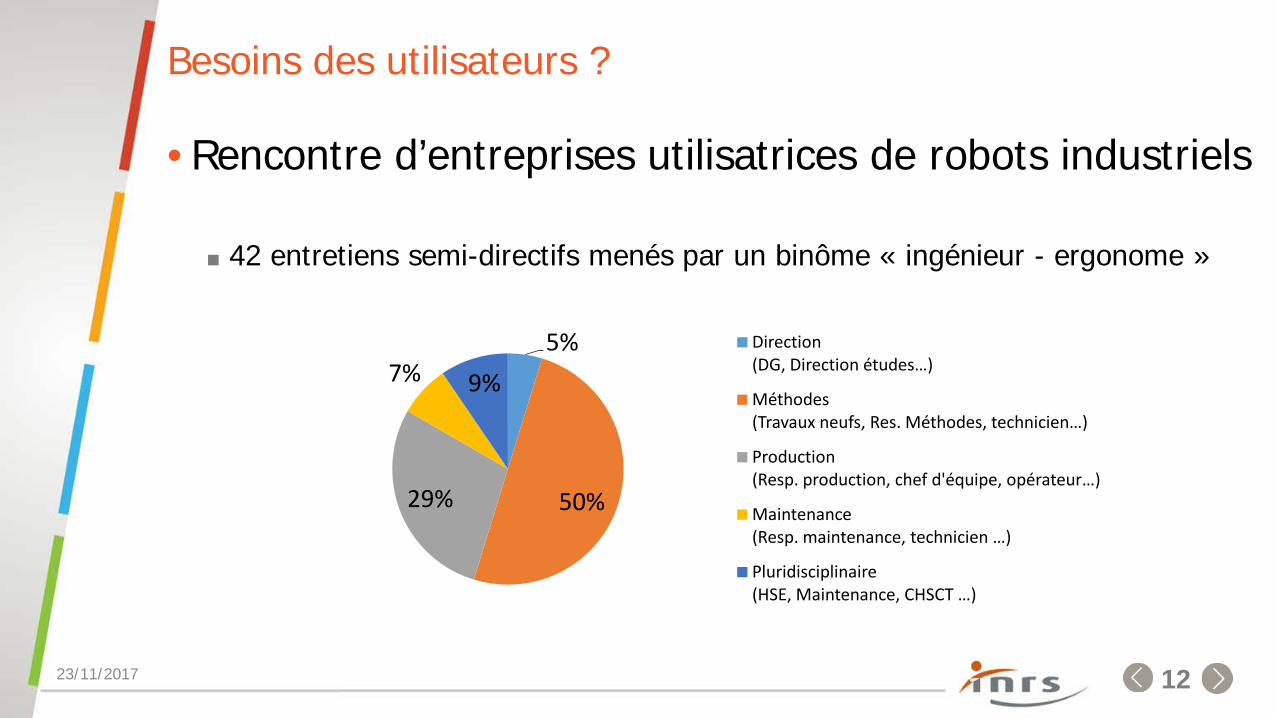
• Rencontre d’entreprises utilisatrices de robots industriels
42 entretiens semi-directifs menés par un binôme « ingénieur - ergonome »
23/11/2017
5%
50% 29%
7% 9%
Direction (DG, Direction études…)
Méthodes (Travaux neufs, Res. Méthodes, technicien…)
Production (Resp. production, chef d'équipe, opérateur…)
Maintenance (Resp. maintenance, technicien …)
Pluridisciplinaire (HSE, Maintenance, CHSCT …)

.13
Besoins des utilisateurs ?
23/11/2017
• 21 entreprises > Toutes tailles : TPE, PME, ETI
> Secteur d’activités variés
• Automobile (3) • Médical • Aéronautique (2) • Télécommunications • Electroménager • Fabrication produits métalliques (2) • Fabrication produits plastiques (2) • Maroquinerie (2) • Industries alimentaires (3) • Industries du bois (3) • Bâtiment
.14
Besoins des utilisateurs ?
23/11/2017
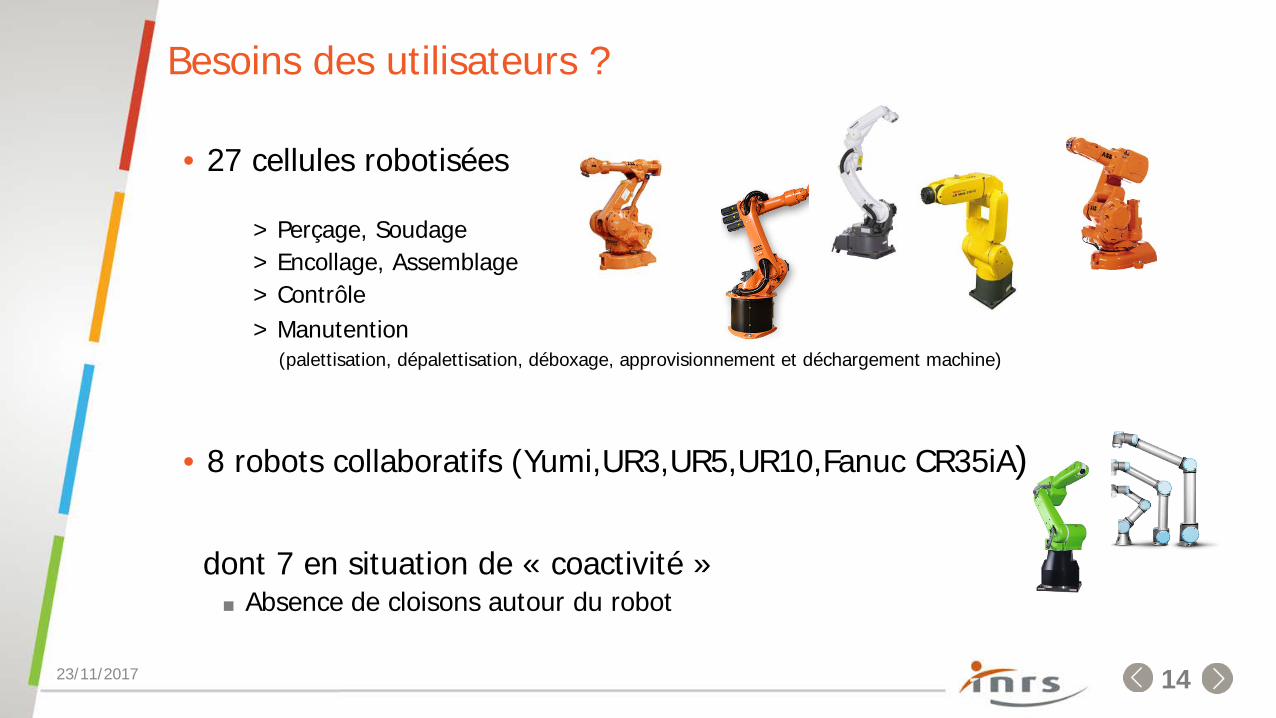
• 27 cellules robotisées
> Perçage, Soudage > Encollage, Assemblage > Contrôle > Manutention
(palettisation, dépalettisation, déboxage, approvisionnement et déchargement machine)
• 8 robots collaboratifs (Yumi,UR3,UR5,UR10,Fanuc CR35iA)
dont 7 en situation de « coactivité »
Absence de cloisons autour du robot

.15
Besoins des utilisateurs ?
• Intérêt pour la coactivité :
64 % des entreprises ont montré un intérêt pour la coactivité
23/11/2017
45%
19%
36%
Exprimé spontanément (Phase1)
Exprimé après suggestion (Phase2)
Absence d'intérêt
.16
Besoins des utilisateurs ?
23/11/2017
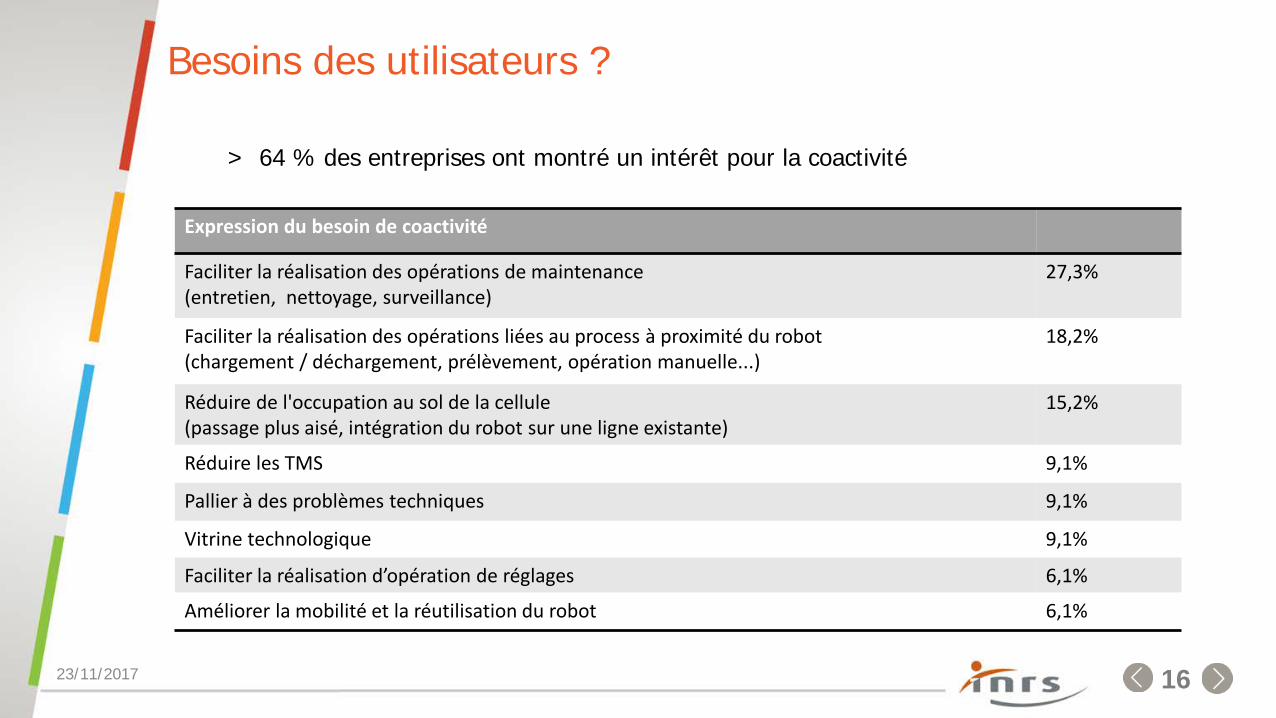
> 64 % des entreprises ont montré un intérêt pour la coactivité
Expression du besoin de coactivité
Faciliter la réalisation des opérations de maintenance (entretien, nettoyage, surveillance)
27,3%
Faciliter la réalisation des opérations liées au process à proximité du robot (chargement / déchargement, prélèvement, opération manuelle...)
18,2%
Réduire de l'occupation au sol de la cellule (passage plus aisé, intégration du robot sur une ligne existante)
15,2%
Réduire les TMS 9,1%
Pallier à des problèmes techniques 9,1%
Vitrine technologique 9,1%
Faciliter la réalisation d’opération de réglages 6,1%
Améliorer la mobilité et la réutilisation du robot 6,1%
.17
Besoins des utilisateurs ?
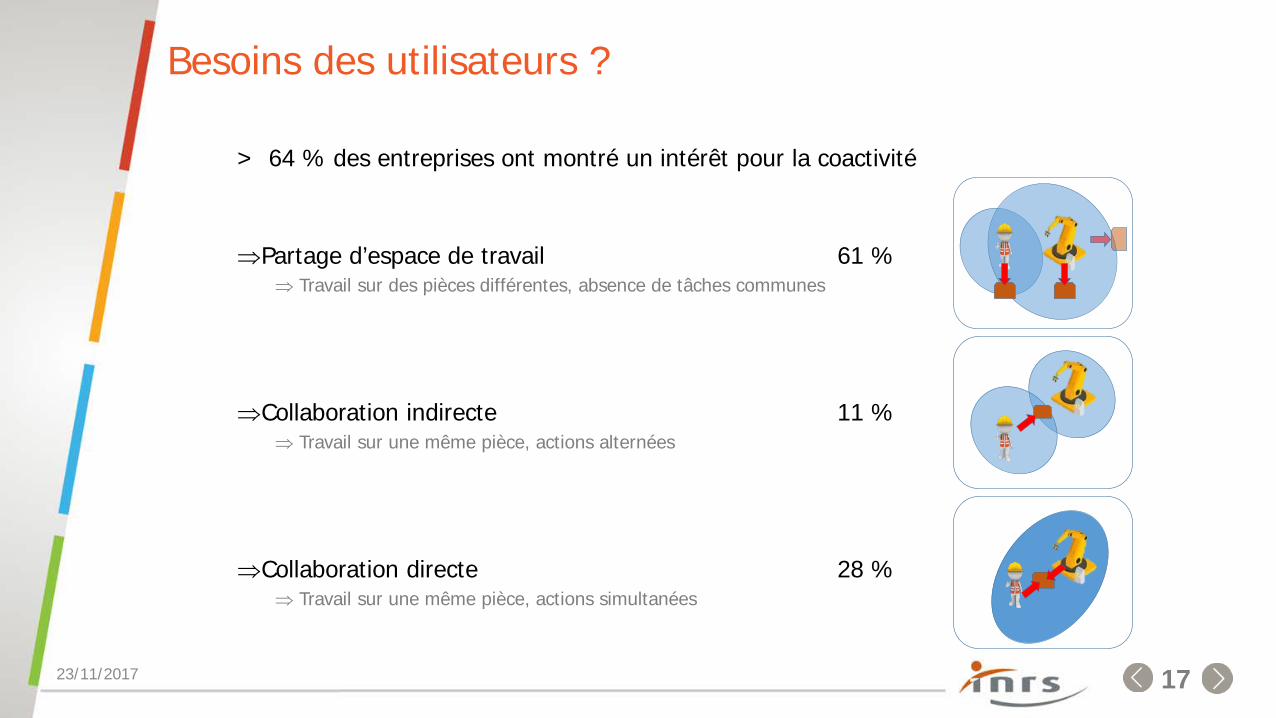
> 64 % des entreprises ont montré un intérêt pour la coactivité
⇒Partage d’espace de travail 61 % ⇒ Travail sur des pièces différentes, absence de tâches communes
⇒Collaboration indirecte 11 %
⇒ Travail sur une même pièce, actions alternées
⇒Collaboration directe 28 % ⇒ Travail sur une même pièce, actions simultanées
23/11/2017
.18
Besoins des utilisateurs ?
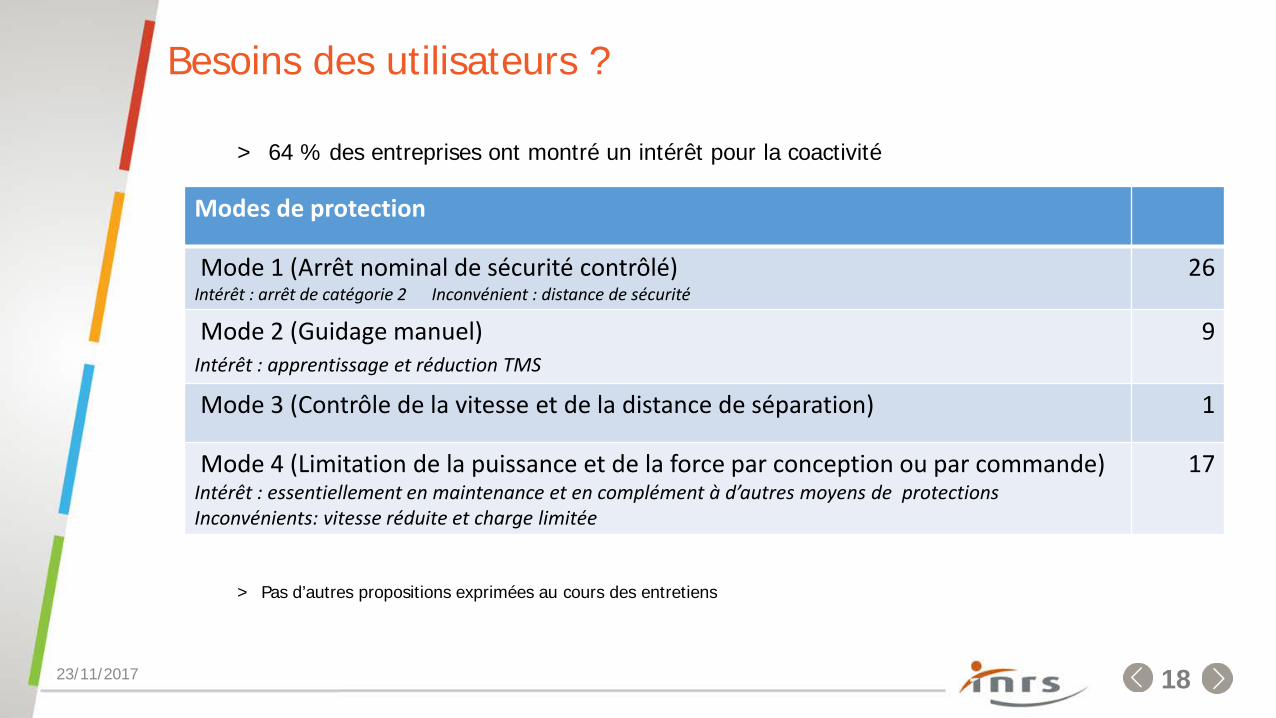
> 64 % des entreprises ont montré un intérêt pour la coactivité
> Pas d’autres propositions exprimées au cours des entretiens
23/11/2017
Modes de protection
Mode 1 (Arrêt nominal de sécurité contrôlé) Intérêt : arrêt de catégorie 2 Inconvénient : distance de sécurité
26
Mode 2 (Guidage manuel) Intérêt : apprentissage et réduction TMS
9
Mode 3 (Contrôle de la vitesse et de la distance de séparation) 1
Mode 4 (Limitation de la puissance et de la force par conception ou par commande) Intérêt : essentiellement en maintenance et en complément à d’autres moyens de protections Inconvénients: vitesse réduite et charge limitée
17
.19
Besoins des utilisateurs ?
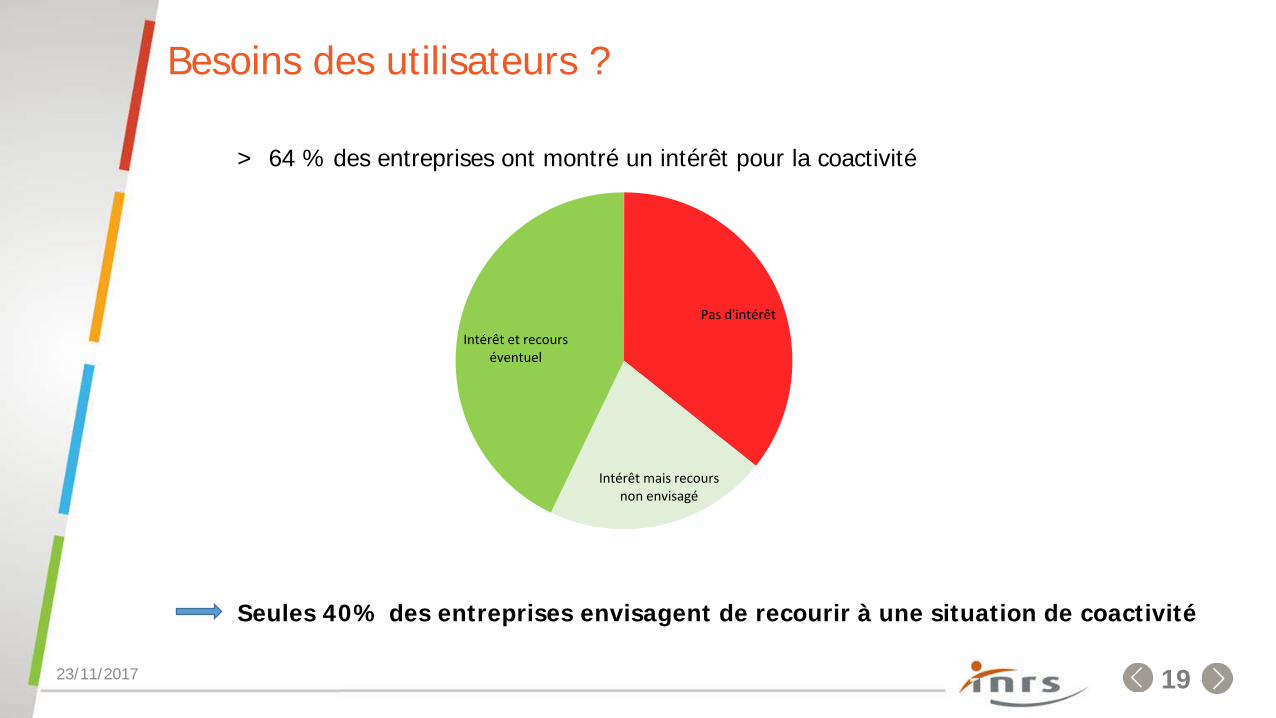
> 64 % des entreprises ont montré un intérêt pour la coactivité
Seules 40% des entreprises envisagent de recourir à une situation de coactivité
23/11/2017
Pas d'intérêt
Intérêt mais recours non envisagé
Intérêt et recours éventuel
.20
Besoins des utilisateurs ?
23/11/2017
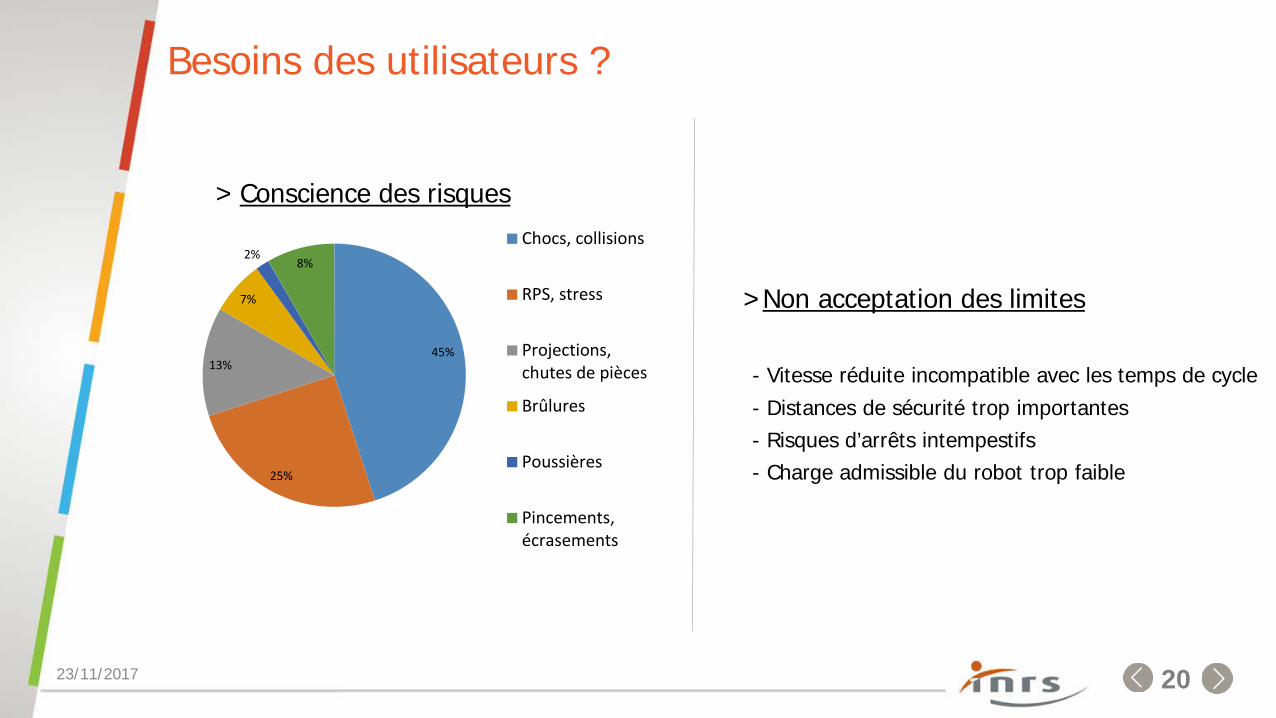
45%
25%
13%
7%
2% 8%
Chocs, collisions
RPS, stress
Projections,chutes de pièces
Brûlures
Poussières
Pincements,écrasements
>Non acceptation des limites
- Vitesse réduite incompatible avec les temps de cycle - Distances de sécurité trop importantes - Risques d’arrêts intempestifs - Charge admissible du robot trop faible
> Conscience des risques
.21
Conclusion / Perspective
Besoin de coactivité exprimé dans 64% des cas
Attentes > Gain de productivité (optimisation, pallier à des problèmes techniques…)
> Gain de flexibilité (intégration, mobilité, adaptabilité, réactivité …)
> Amélioration des conditions de travail
Coactivité envisagée par 40% des personnes interviewées
Mode de protection envisagés > Mode 1 et mode 4
Mise en œuvre délicate => Ouverture en 2018 d’une étude sur la mise en œuvre d’un îlot flexible avec robot mobile.
23/11/2017

Notre métier, rendre le vôtre plus sûr Merci de votre attention