robust adaptive control of a sucker-rod pumping system of ...€¦ · robust adaptive control of a...
TRANSCRIPT

Robust Adaptive Control of a Sucker-Rod Pumping System of OilWells
LUIZ H. S. TORRES, LEIZER SCHNITMANUniversidade Federal da Bahia
Centro de Capacitacao Tecnologicaem Automacao Industrial (CTAI)
Rua Aristides Novis, n 02, Escola Politecnicasegundo andar, 40.210-630, Salvador, Bahia
[email protected], [email protected]
J. A. M FELIPPE DE SOUZAUniversity of Beira Interior
Electromechanical Engineering DepartmentCovilha (phone: +351 275 329 707)
Abstract: Several studies have shown that the satisfactory oil well operations with sucker-rod pumps is attributedto the techniques and methods which are able to control the performance of the well. However, the presence ofuncertainties in the sucker-rod dynamical models or parameter variations may jeopardize the desired performanceof the control system and the rod pump system productivity. These parameters are normally related to, for example,fluid characteristics in the well, environmental properties at the bottom of the hole, electrical components andmechanical assembly. The purpose of this paper is to use a robust adaptive controller (called IVS-MRAC) todeal with some uncertainties in the system model, unmodelled dynamics, parameter variations, and the presenceof perturbations in the automatic level control system of the annular well. The results obtained in simulatedenvironment have shown that the adaptive controller is able to deal satisfactorily with uncertainties and variations,such as for instance, in the pumped fluid composition (water, oil and/or gas), a very common situation in realproduction fields. The fast transitory with no oscillations (typical characteristic of variable structure systems) isalso observed in the plant output and control effort signals. The results are also compared with a conventional PIDcontroller.
Key–Words: Adaptive control, Control applications, Oil industry, Process automation, Production control, Robustcontrol, Sucker-Rod pump systems.
1 IntroductionThe sucker-rod pump system is the artificial liftmethod most used in the current on-shore petroleumindustry due to the simplicity of its equipments andfacilities [1]. This method is also considered as thefirst technique used to lift oil up from wells. Studieshave shown that its popularity is related to low cost ofinvestments and maintenance, deep and outflow flex-ibility, good energy efficiency and the possibility foroperating in different fluid compositions and viscosi-ties in a wide range of temperatures [2].
Although this lift method is already well-knownand widely used, there are still some circumstances inwhich improvements in the operational conditions arestill possible, especially when dealing with produc-tion control strategies of the pump unit for increasingthe system productivity. The development of low costsensors turned possible the measurement of bottom-hole variables that assists the production monitoring,application of new control strategies, and enhance-ment of the process automation [3, 4, 5].
In terms of production control of the pump unit,the presence of uncertainties in parameters, parametervariations, unmodelled dynamics, and perturbationsare challenges to the control system and they can jeop-ardize the good performance of a conventional con-troller, PID.
The aim of this paper is to use an Indirect VariableStructure Model Reference Adaptive Control (IVS-MRAC) based on [6] to deal with the challenges intothe automatic control of the fluid level in the annu-lar well. The negative effects caused by parametervariations and perturbations are related to some phys-ical parameters of the system or faults of electricaland mechanical components. These effects may riskthe satisfactory operation of the pump controller withconsequences in the system oil productivity.
2 The Sucker-Rod Pump SystemIn this artificial lift method a rotary movement ofprime mover (either an electric or a combustion mo-
Recent Advances in Circuits, Communications and Signal Processing
ISBN: 978-1-61804-164-7 273
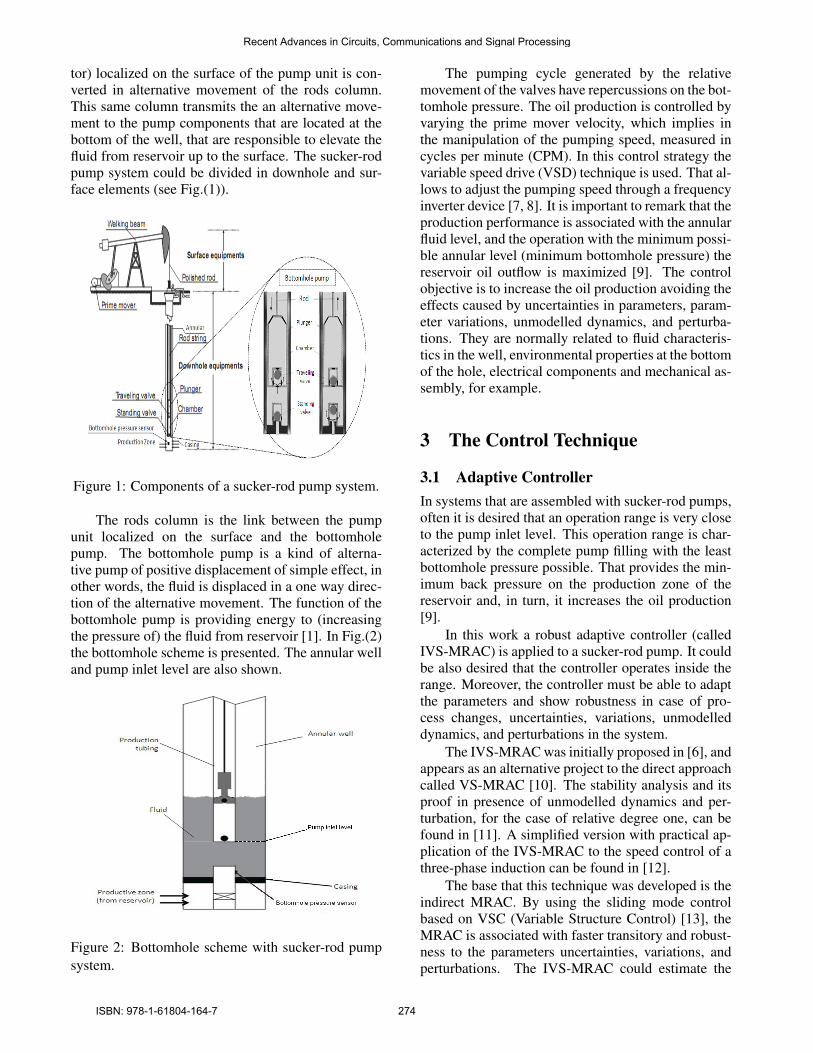
tor) localized on the surface of the pump unit is con-verted in alternative movement of the rods column.This same column transmits the an alternative move-ment to the pump components that are located at thebottom of the well, that are responsible to elevate thefluid from reservoir up to the surface. The sucker-rodpump system could be divided in downhole and sur-face elements (see Fig.(1)).
Figure 1: Components of a sucker-rod pump system.
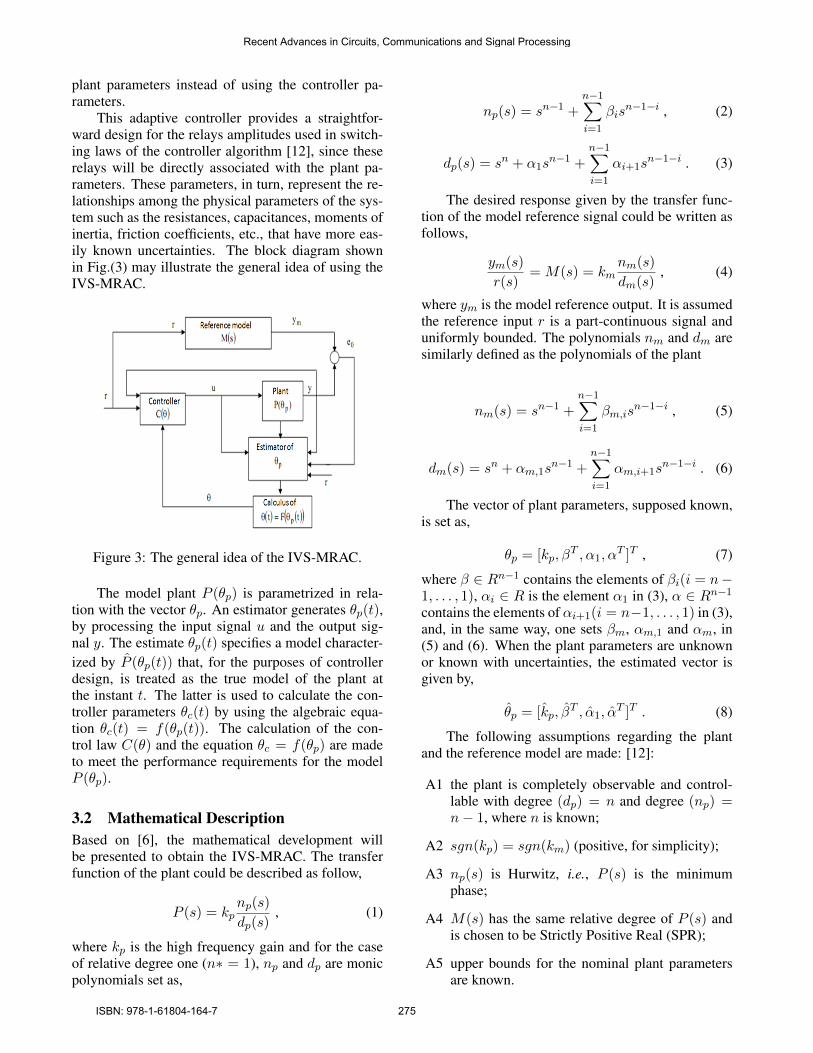
The rods column is the link between the pumpunit localized on the surface and the bottomholepump. The bottomhole pump is a kind of alterna-tive pump of positive displacement of simple effect, inother words, the fluid is displaced in a one way direc-tion of the alternative movement. The function of thebottomhole pump is providing energy to (increasingthe pressure of) the fluid from reservoir [1]. In Fig.(2)the bottomhole scheme is presented. The annular welland pump inlet level are also shown.
Figure 2: Bottomhole scheme with sucker-rod pumpsystem.
The pumping cycle generated by the relativemovement of the valves have repercussions on the bot-tomhole pressure. The oil production is controlled byvarying the prime mover velocity, which implies inthe manipulation of the pumping speed, measured incycles per minute (CPM). In this control strategy thevariable speed drive (VSD) technique is used. That al-lows to adjust the pumping speed through a frequencyinverter device [7, 8]. It is important to remark that theproduction performance is associated with the annularfluid level, and the operation with the minimum possi-ble annular level (minimum bottomhole pressure) thereservoir oil outflow is maximized [9]. The controlobjective is to increase the oil production avoiding theeffects caused by uncertainties in parameters, param-eter variations, unmodelled dynamics, and perturba-tions. They are normally related to fluid characteris-tics in the well, environmental properties at the bottomof the hole, electrical components and mechanical as-sembly, for example.
3 The Control Technique
3.1 Adaptive ControllerIn systems that are assembled with sucker-rod pumps,often it is desired that an operation range is very closeto the pump inlet level. This operation range is char-acterized by the complete pump filling with the leastbottomhole pressure possible. That provides the min-imum back pressure on the production zone of thereservoir and, in turn, it increases the oil production[9].
In this work a robust adaptive controller (calledIVS-MRAC) is applied to a sucker-rod pump. It couldbe also desired that the controller operates inside therange. Moreover, the controller must be able to adaptthe parameters and show robustness in case of pro-cess changes, uncertainties, variations, unmodelleddynamics, and perturbations in the system.
The IVS-MRAC was initially proposed in [6], andappears as an alternative project to the direct approachcalled VS-MRAC [10]. The stability analysis and itsproof in presence of unmodelled dynamics and per-turbation, for the case of relative degree one, can befound in [11]. A simplified version with practical ap-plication of the IVS-MRAC to the speed control of athree-phase induction can be found in [12].
The base that this technique was developed is theindirect MRAC. By using the sliding mode controlbased on VSC (Variable Structure Control) [13], theMRAC is associated with faster transitory and robust-ness to the parameters uncertainties, variations, andperturbations. The IVS-MRAC could estimate the
Recent Advances in Circuits, Communications and Signal Processing
ISBN: 978-1-61804-164-7 274
plant parameters instead of using the controller pa-rameters.
This adaptive controller provides a straightfor-ward design for the relays amplitudes used in switch-ing laws of the controller algorithm [12], since theserelays will be directly associated with the plant pa-rameters. These parameters, in turn, represent the re-lationships among the physical parameters of the sys-tem such as the resistances, capacitances, moments ofinertia, friction coefficients, etc., that have more eas-ily known uncertainties. The block diagram shownin Fig.(3) may illustrate the general idea of using theIVS-MRAC.
Figure 3: The general idea of the IVS-MRAC.
The model plant P (θp) is parametrized in rela-tion with the vector θp. An estimator generates θp(t),by processing the input signal u and the output sig-nal y. The estimate θp(t) specifies a model character-ized by P (θp(t)) that, for the purposes of controllerdesign, is treated as the true model of the plant atthe instant t. The latter is used to calculate the con-troller parameters θc(t) by using the algebraic equa-tion θc(t) = f(θp(t)). The calculation of the con-trol law C(θ) and the equation θc = f(θp) are madeto meet the performance requirements for the modelP (θp).
3.2 Mathematical DescriptionBased on [6], the mathematical development willbe presented to obtain the IVS-MRAC. The transferfunction of the plant could be described as follow,
P (s) = kpnp(s)
dp(s), (1)
where kp is the high frequency gain and for the caseof relative degree one (n∗ = 1), np and dp are monicpolynomials set as,
np(s) = sn−1 +n−1∑i=1
βisn−1−i , (2)
dp(s) = sn + α1sn−1 +
n−1∑i=1
αi+1sn−1−i . (3)
The desired response given by the transfer func-tion of the model reference signal could be written asfollows,
ym(s)
r(s)=M(s) = km
nm(s)
dm(s), (4)
where ym is the model reference output. It is assumedthe reference input r is a part-continuous signal anduniformly bounded. The polynomials nm and dm aresimilarly defined as the polynomials of the plant
nm(s) = sn−1 +n−1∑i=1
βm,isn−1−i , (5)
dm(s) = sn + αm,1sn−1 +
n−1∑i=1
αm,i+1sn−1−i . (6)
The vector of plant parameters, supposed known,is set as,
θp = [kp, βT , α1, α
T ]T , (7)
where β ∈ Rn−1 contains the elements of βi(i = n−1, . . . , 1), αi ∈ R is the element α1 in (3), α ∈ Rn−1
contains the elements of αi+1(i = n−1, . . . , 1) in (3),and, in the same way, one sets βm, αm,1 and αm, in(5) and (6). When the plant parameters are unknownor known with uncertainties, the estimated vector isgiven by,
θp = [kp, βT , α1, α
T ]T . (8)
The following assumptions regarding the plantand the reference model are made: [12]:
A1 the plant is completely observable and control-lable with degree (dp) = n and degree (np) =n− 1, where n is known;
A2 sgn(kp) = sgn(km) (positive, for simplicity);
A3 np(s) is Hurwitz, i.e., P (s) is the minimumphase;
A4 M(s) has the same relative degree of P (s) andis chosen to be Strictly Positive Real (SPR);
A5 upper bounds for the nominal plant parametersare known.
Recent Advances in Circuits, Communications and Signal Processing
ISBN: 978-1-61804-164-7 275

For a first-order system, the vector of the esti-mated parameters could be rewritten as,
θp = [kp, α1, ]T . (9)
The error equation between the plant responseand the reference model output (desired response) isgiven by,
e = y − ym . (10)
If the previous assumptions are satisfied, one hasthe matching condition, i.e., y → ym. The control lawu could be rewritten as,
u = θny + θ2nr , (11)
θn =α1 − αm,1
kp, (12)
θ2n =km
kp. (13)
The controller parameters are updated by usingthe estimates of the plant parameters, characteristic ofthe approach of IVS-MRAC. The estimates, in turn,are obtained according to the original laws proposedin [6],
kp = knomp − kpsgn(vav) , (14)
α1 = −α1sgn(e0ζ1) , (15)
where sgn is called signal function and ζ1 is an aux-iliary signal. In this work this signal is defined asζ1 = y. The values of knomp , kp , and α1 are con-stants. The values kp and α1 are associated with therelays sizing in the switching laws in (14) and (15).From (14) the presence of knomp (positive and nominalvalue of kp) is justified to prevent that the estimate ofthe high frequency gain of the plant kp becomes neg-ative, situation that would violate the assumption A2.Finally, the sufficient conditions to design the relaysamplitudes and, in turn, to obtain the sliding mode,
kp > |kp − knomp | com knomp > kp , (16)
α1 > |α1| . (17)
The argument vav in (14) is a mean-value-first-order-filter with a time constant τ and that it is suffi-ciently small (i.e., τ → 0). It could be seen here as aninherent unmodelled dynamics that could influence inthe system stability. The stability proof of the IVS-MRAC that considers this fact can be found in [11].The function vav, therefore, could be set as,
vav =1
τs+ 1v , (18)
where v is an auxiliary signal defined as v = −e0uc.
4 Simulations and Analysis ResultsIn the present work, the Matlab Simulink was used tosimulate the proposed controller for the level controlof the fluid in the annular well of a sucker-rod pumpsystem.
From [14] one has the SISO transfer functions ofthe plant dynamical system and its reference model,respectively,
Plant P (s) = kpnp(s)dp(s)
= 3.522×10−5
s+6.973×10−4
⇒ kp = 3.522× 10−5 ; α1 = 6.973× 10−4
Reference Model M(s) = kmnm(s)dm(s) = 3.874×10−5
s+7.671×10−4
⇒ km = 3.874× 10−5 ; αm,1 = 7.671× 10−4
In these models the level in the annular well (mea-sured in meters) is considered as the process variable(PV), and the pumping speed (measured in cycles perminute - CPM) as the manipulated variable (MV).
The plant parameters kp and α1 used in the sim-ulations are with 10% of uncertainties around themodel reference parameters. The initial conditions ofthe plant and the reference model were different to fa-cilitate the observation of the tracking properties. Thesimulations were performed regarding the referenceinput r, a set of step signals. It was adopted knomp =
3, 522 × 10−5 and kp = 7, 044 × 10−7. The valueof α1 is chosen from the value |α1| = 6, 973× 10−4.It was adopted 10% plus of uncertainty and the valuewas α1 = 7, 671×10−4. The time constant τ was ad-justed along the simulation. It was adopted τ = 0, 01.In Fig.(4) the compared response between the refer-ence model output and the plant output is presented.In Fig.(5) and Fig.(6) show the error signal (in me-ters) and the control effort (related to the variation ofthe CPM - in percent).
It could be observed in Fig.(4) that the referencemodel (desired response) output given was tracked bythe plant output. The process variable (fluid level inthe annular well) could be observed in Fig.(4) withno oscillations in transitory and stable in steady state.The error in steady state is small and bounded accord-ing to Fig.(5) and the control effort is also boundedin Fig.(6). However, Fig.(6) indicates an input usagefor the proposed controller that in some cases wouldbe considered unacceptable. Thus, some strategies foralleviating the chattering phenomenon [12] should befurther studied.
A new set of simulations is performed to com-pare the IVS-MRAC designed with a conventionalPID controller. By this time the objective is to eval-uate the robustness and adaptation properties of the
Recent Advances in Circuits, Communications and Signal Processing
ISBN: 978-1-61804-164-7 276
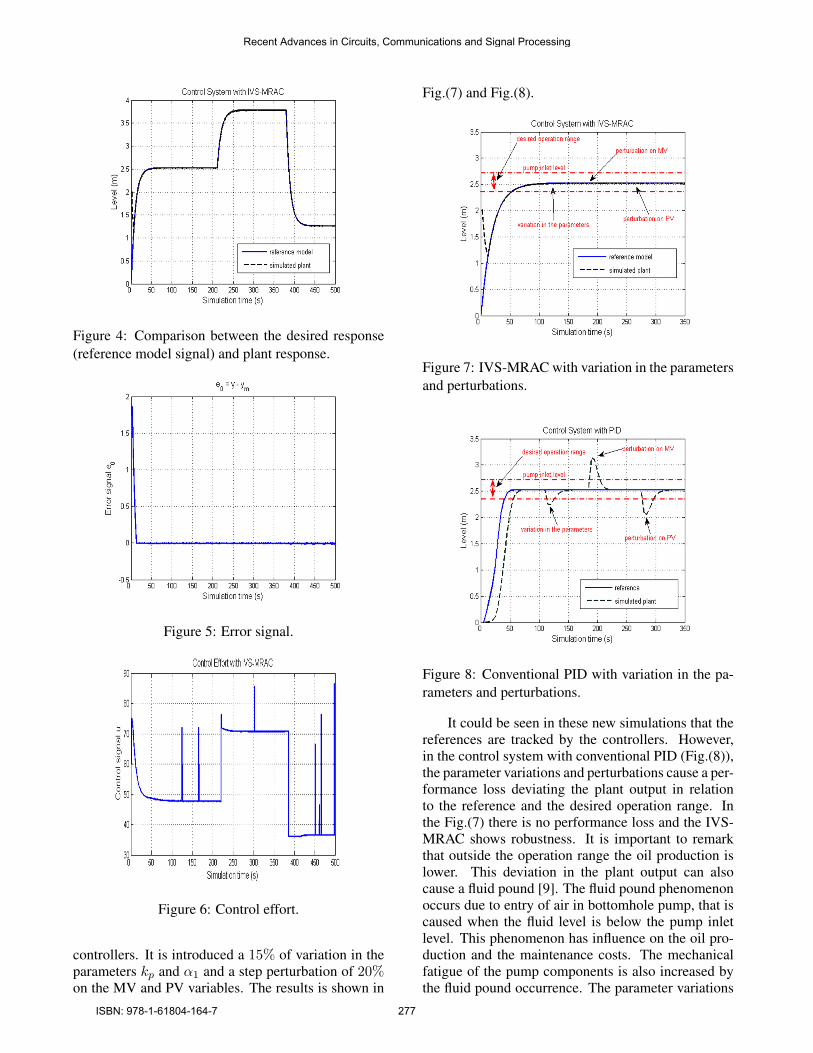
Figure 4: Comparison between the desired response(reference model signal) and plant response.
Figure 5: Error signal.
Figure 6: Control effort.
controllers. It is introduced a 15% of variation in theparameters kp and α1 and a step perturbation of 20%on the MV and PV variables. The results is shown in
Fig.(7) and Fig.(8).
Figure 7: IVS-MRAC with variation in the parametersand perturbations.
Figure 8: Conventional PID with variation in the pa-rameters and perturbations.
It could be seen in these new simulations that thereferences are tracked by the controllers. However,in the control system with conventional PID (Fig.(8)),the parameter variations and perturbations cause a per-formance loss deviating the plant output in relationto the reference and the desired operation range. Inthe Fig.(7) there is no performance loss and the IVS-MRAC shows robustness. It is important to remarkthat outside the operation range the oil production islower. This deviation in the plant output can alsocause a fluid pound [9]. The fluid pound phenomenonoccurs due to entry of air in bottomhole pump, that iscaused when the fluid level is below the pump inletlevel. This phenomenon has influence on the oil pro-duction and the maintenance costs. The mechanicalfatigue of the pump components is also increased bythe fluid pound occurrence. The parameter variations
Recent Advances in Circuits, Communications and Signal Processing
ISBN: 978-1-61804-164-7 277
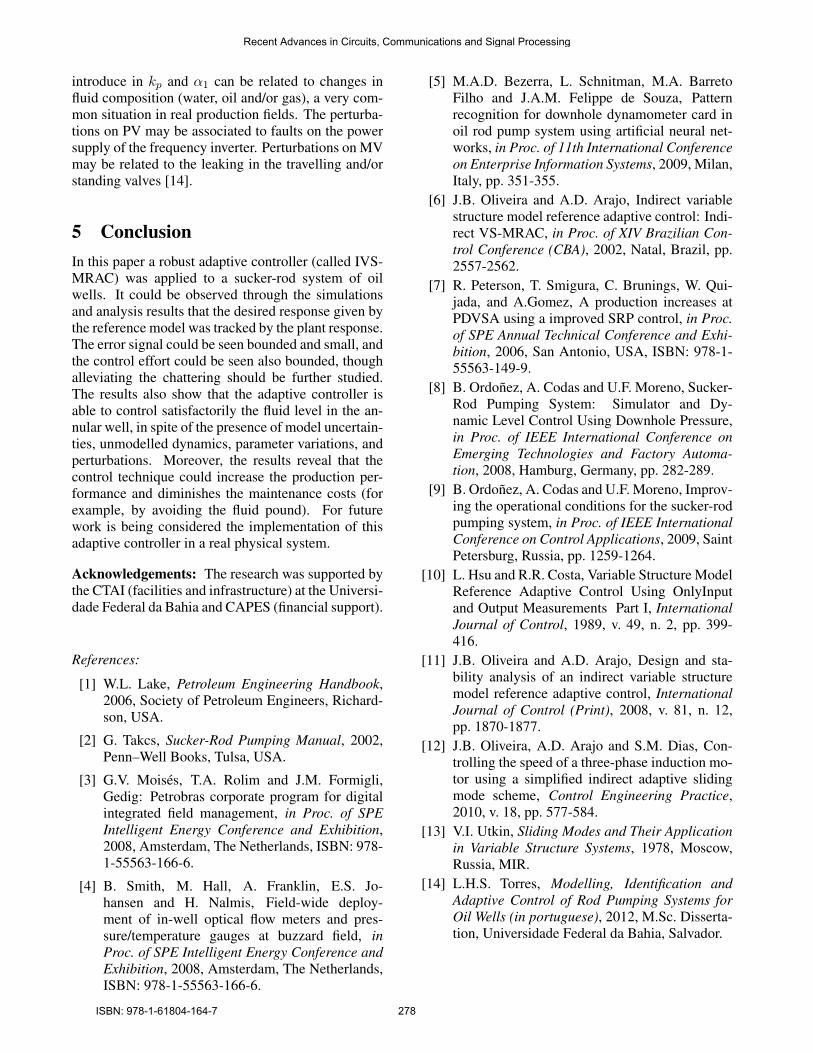
introduce in kp and α1 can be related to changes influid composition (water, oil and/or gas), a very com-mon situation in real production fields. The perturba-tions on PV may be associated to faults on the powersupply of the frequency inverter. Perturbations on MVmay be related to the leaking in the travelling and/orstanding valves [14].
5 ConclusionIn this paper a robust adaptive controller (called IVS-MRAC) was applied to a sucker-rod system of oilwells. It could be observed through the simulationsand analysis results that the desired response given bythe reference model was tracked by the plant response.The error signal could be seen bounded and small, andthe control effort could be seen also bounded, thoughalleviating the chattering should be further studied.The results also show that the adaptive controller isable to control satisfactorily the fluid level in the an-nular well, in spite of the presence of model uncertain-ties, unmodelled dynamics, parameter variations, andperturbations. Moreover, the results reveal that thecontrol technique could increase the production per-formance and diminishes the maintenance costs (forexample, by avoiding the fluid pound). For futurework is being considered the implementation of thisadaptive controller in a real physical system.
Acknowledgements: The research was supported bythe CTAI (facilities and infrastructure) at the Universi-dade Federal da Bahia and CAPES (financial support).
References:
[1] W.L. Lake, Petroleum Engineering Handbook,2006, Society of Petroleum Engineers, Richard-son, USA.
[2] G. Takcs, Sucker-Rod Pumping Manual, 2002,Penn–Well Books, Tulsa, USA.
[3] G.V. Moises, T.A. Rolim and J.M. Formigli,Gedig: Petrobras corporate program for digitalintegrated field management, in Proc. of SPEIntelligent Energy Conference and Exhibition,2008, Amsterdam, The Netherlands, ISBN: 978-1-55563-166-6.
[4] B. Smith, M. Hall, A. Franklin, E.S. Jo-hansen and H. Nalmis, Field-wide deploy-ment of in-well optical flow meters and pres-sure/temperature gauges at buzzard field, inProc. of SPE Intelligent Energy Conference andExhibition, 2008, Amsterdam, The Netherlands,ISBN: 978-1-55563-166-6.
[5] M.A.D. Bezerra, L. Schnitman, M.A. BarretoFilho and J.A.M. Felippe de Souza, Patternrecognition for downhole dynamometer card inoil rod pump system using artificial neural net-works, in Proc. of 11th International Conferenceon Enterprise Information Systems, 2009, Milan,Italy, pp. 351-355.
[6] J.B. Oliveira and A.D. Arajo, Indirect variablestructure model reference adaptive control: Indi-rect VS-MRAC, in Proc. of XIV Brazilian Con-trol Conference (CBA), 2002, Natal, Brazil, pp.2557-2562.
[7] R. Peterson, T. Smigura, C. Brunings, W. Qui-jada, and A.Gomez, A production increases atPDVSA using a improved SRP control, in Proc.of SPE Annual Technical Conference and Exhi-bition, 2006, San Antonio, USA, ISBN: 978-1-55563-149-9.
[8] B. Ordonez, A. Codas and U.F. Moreno, Sucker-Rod Pumping System: Simulator and Dy-namic Level Control Using Downhole Pressure,in Proc. of IEEE International Conference onEmerging Technologies and Factory Automa-tion, 2008, Hamburg, Germany, pp. 282-289.
[9] B. Ordonez, A. Codas and U.F. Moreno, Improv-ing the operational conditions for the sucker-rodpumping system, in Proc. of IEEE InternationalConference on Control Applications, 2009, SaintPetersburg, Russia, pp. 1259-1264.
[10] L. Hsu and R.R. Costa, Variable Structure ModelReference Adaptive Control Using OnlyInputand Output Measurements Part I, InternationalJournal of Control, 1989, v. 49, n. 2, pp. 399-416.
[11] J.B. Oliveira and A.D. Arajo, Design and sta-bility analysis of an indirect variable structuremodel reference adaptive control, InternationalJournal of Control (Print), 2008, v. 81, n. 12,pp. 1870-1877.
[12] J.B. Oliveira, A.D. Arajo and S.M. Dias, Con-trolling the speed of a three-phase induction mo-tor using a simplified indirect adaptive slidingmode scheme, Control Engineering Practice,2010, v. 18, pp. 577-584.
[13] V.I. Utkin, Sliding Modes and Their Applicationin Variable Structure Systems, 1978, Moscow,Russia, MIR.
[14] L.H.S. Torres, Modelling, Identification andAdaptive Control of Rod Pumping Systems forOil Wells (in portuguese), 2012, M.Sc. Disserta-tion, Universidade Federal da Bahia, Salvador.
Recent Advances in Circuits, Communications and Signal Processing
ISBN: 978-1-61804-164-7 278