robust alignment of the inner detector alignment meeting – 1 st june 2005 florian heinemann atlas ...
Post on 21-Dec-2015
221 views
TRANSCRIPT
Robust Alignment of the Inner Detector
Alignment Meeting – 1st June 2005Florian Heinemann
ATLAS
Alignment Challenge Robust Alignment Code
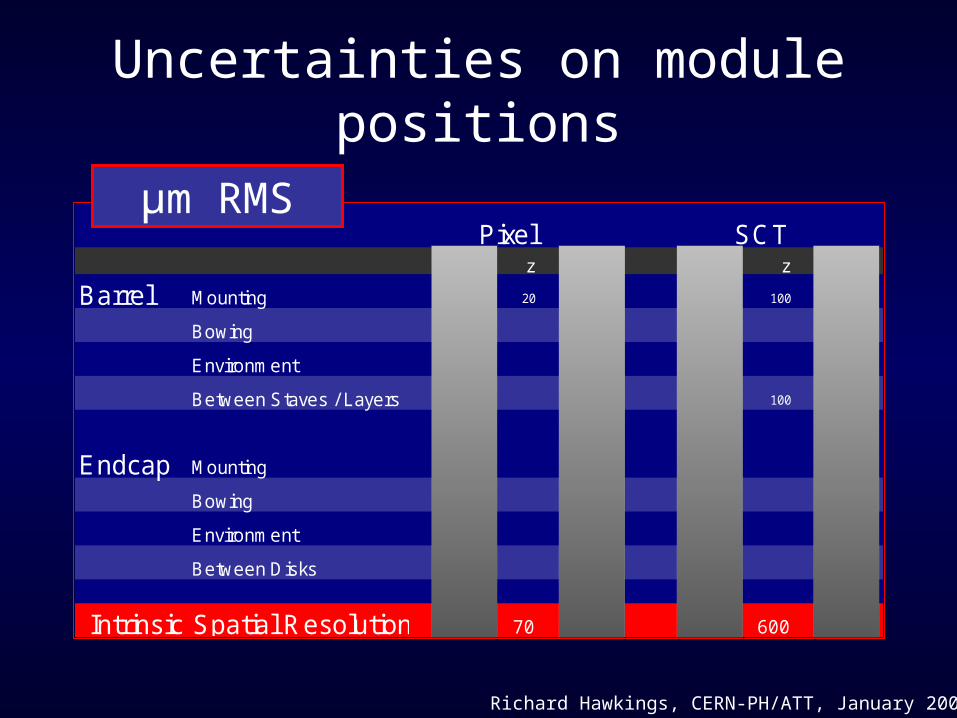
Uncertainties on module positions
Pixel SCTrphi z r rphi z r
Barrel Mounting 10 20 100 100 100
Bowing 100 100
Environment 50
Between Staves / Layers 5 5 100 100 100
Endcap Mounting 25 25 10 10
Bowing 50 50
Environment 20 20 50 50
Between Disks 100 100
Intrinsic Spatial Resolution 15 70 16 600
Richard Hawkings, CERN-PH/ATT, January 2005
µm RMS
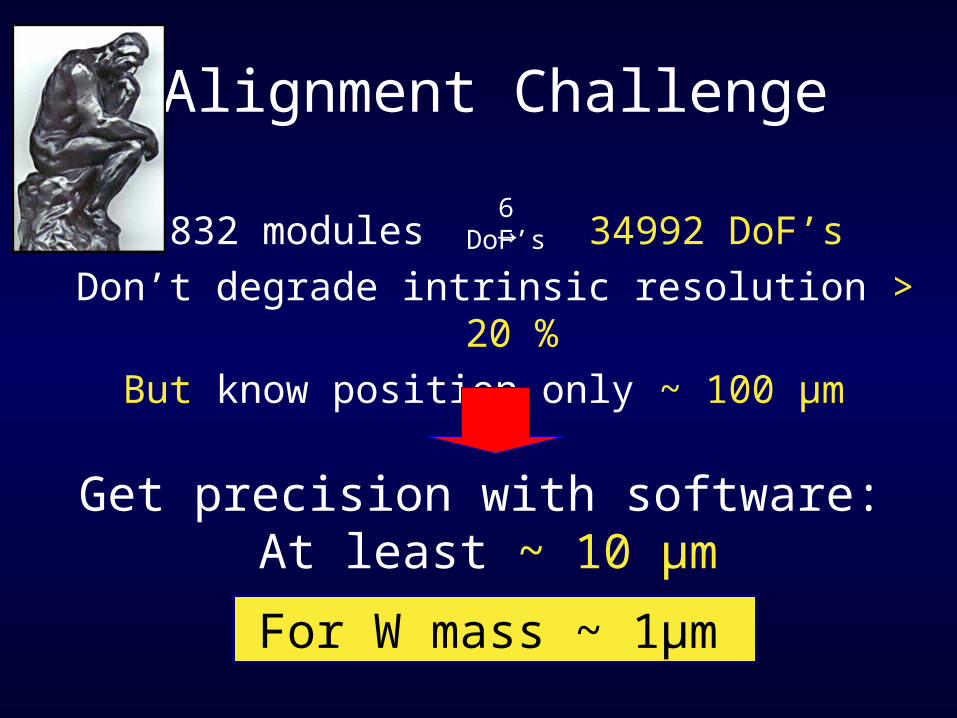
Alignment Challenge
5832 modules → 34992 DoF’s
Don’t degrade intrinsic resolution > 20 %
But know position only ~ 100 µm
Get precision with software: At least ~ 10 µm
For W mass ~ 1µm
6 DoF’s

Track based alignment
Robust AlignmentGobal 2
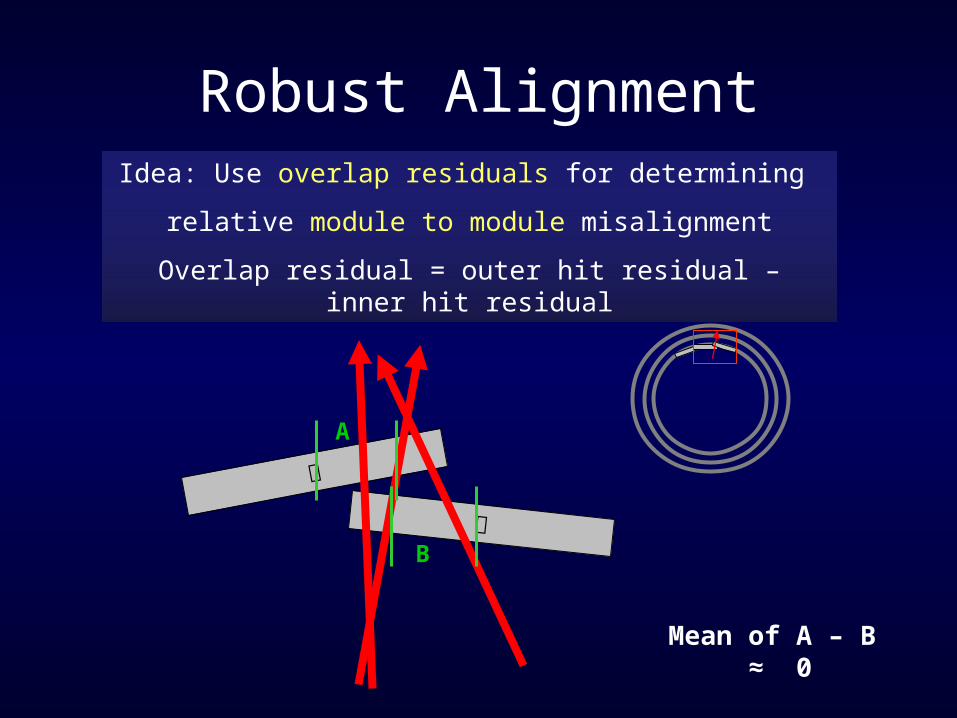
Robust Alignment
ס
ס
A
B
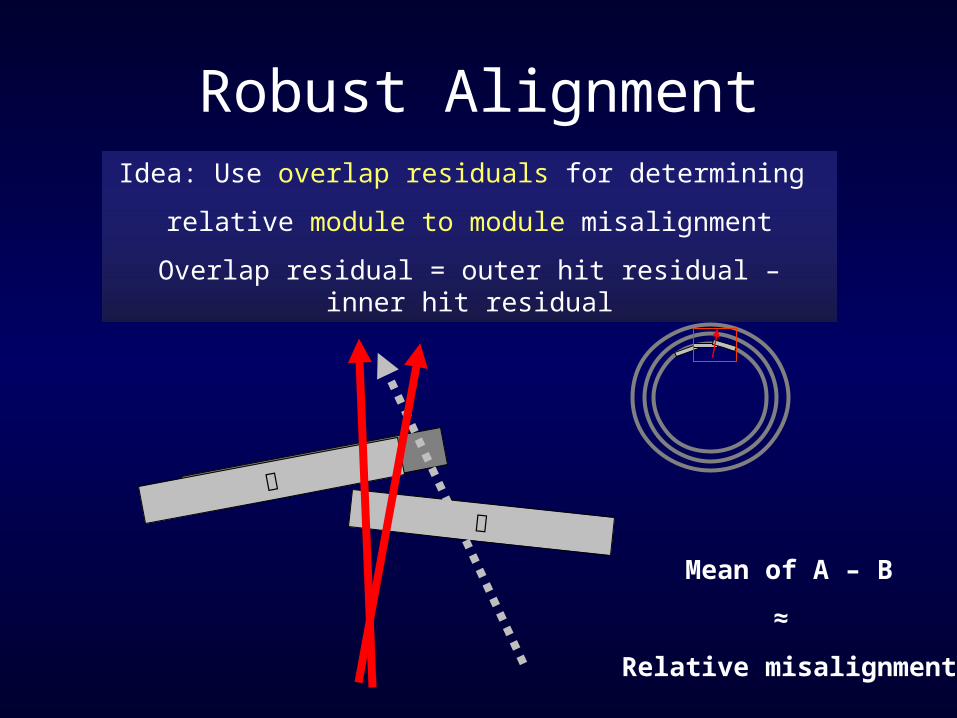
Mean of A – B ≈ 0
Idea: Use overlap residuals for determining
relative module to module misalignment
Overlap residual = outer hit residual – inner hit residual
Robust Alignment
Mean of A – B
≈
Relative misalignment
ס
ס
ס
Idea: Use overlap residuals for determining
relative module to module misalignment
Overlap residual = outer hit residual – inner hit residual
Robust Alignment
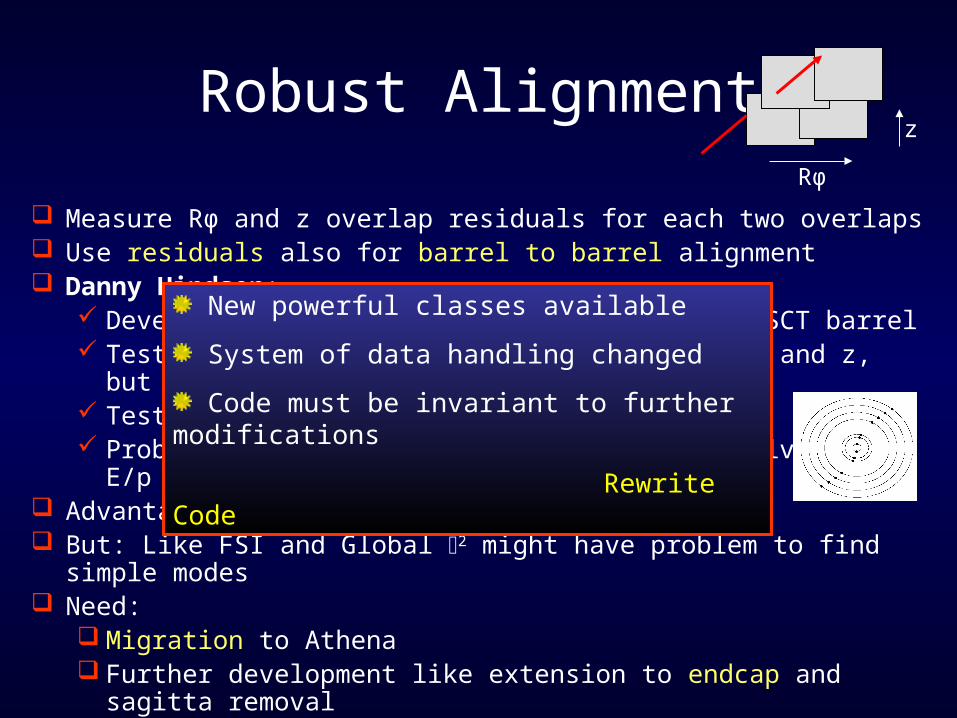
Measure Rφ and z overlap residuals for each two overlaps Use residuals also for barrel to barrel alignment Danny Hindson:
Developed software prototype for Pixel and SCT barrel Tested for inter-barrel module shifts in Rφ and z, but no rotations, no
radius change Tested for barrel to barrel alignment Problems with sagitta distortions partly solved with E/p
Advantage: Simple, stable and covers most DoF But: Like FSI and Global 2 might have problem to find simple modes Need:
Migration to Athena Further development like extension to endcap and sagitta removal
Rφ
z
New powerful classes available
System of data handling changed
Code must be invariant to further modifications
Rewrite Code
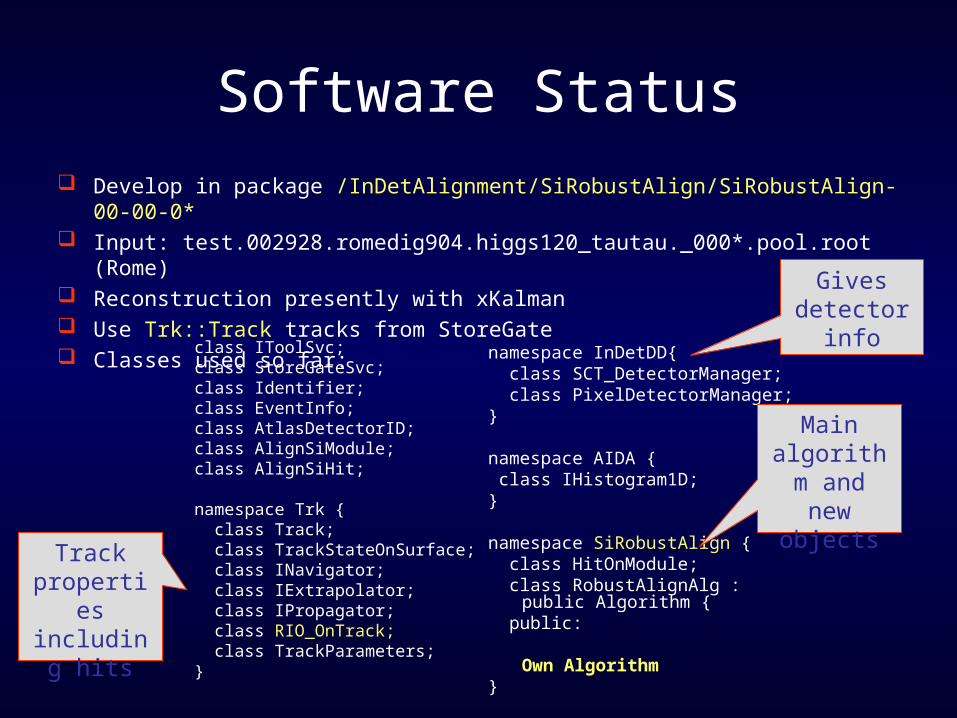
Software Status Develop in package /InDetAlignment/SiRobustAlign/SiRobustAlign-00-00-0* Input: test.002928.romedig904.higgs120_tautau._000*.pool.root (Rome) Reconstruction presently with xKalman Use Trk::Track tracks from StoreGate Classes used so far:
class IToolSvc;class StoreGateSvc;class Identifier; class EventInfo;class AtlasDetectorID;class AlignSiModule;class AlignSiHit;
namespace Trk { class Track; class TrackStateOnSurface; class INavigator; class IExtrapolator; class IPropagator; class RIO_OnTrack; class TrackParameters;}
namespace InDetDD{ class SCT_DetectorManager; class PixelDetectorManager;}
namespace AIDA { class IHistogram1D;}
namespace SiRobustAlign { class HitOnModule; class RobustAlignAlg : public
Algorithm { public:
Own Algorithm}
Track properties including
hits
Main algorithm and new objects
Gives detector
info
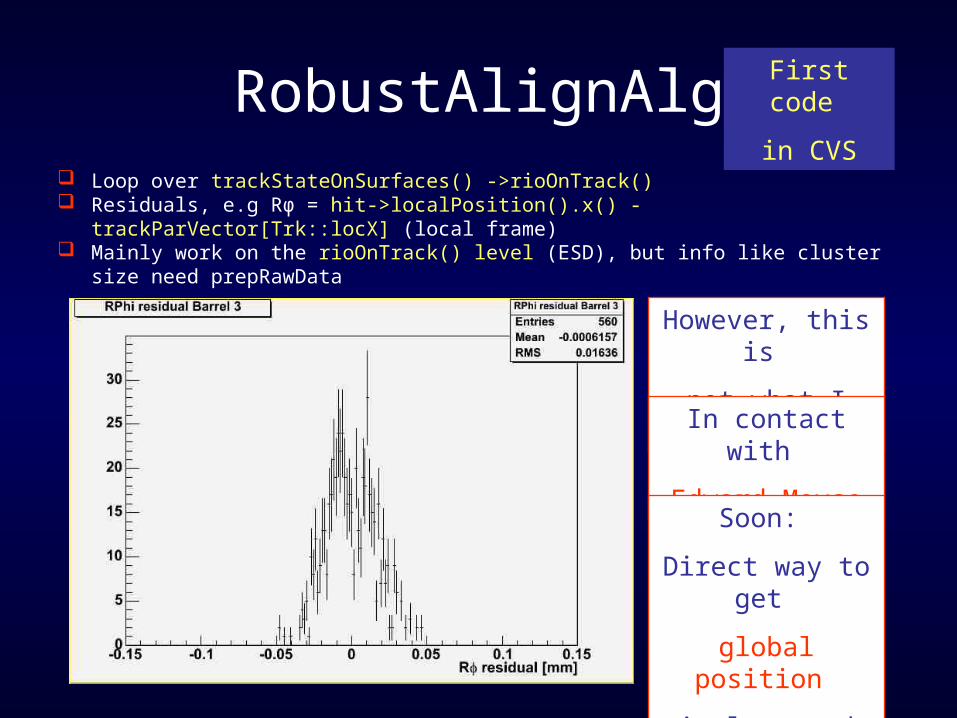
RobustAlignAlg Loop over trackStateOnSurfaces() ->rioOnTrack() Residuals, e.g Rφ = hit->localPosition().x() - trackParVector[Trk::locX] (local frame) Mainly work on the rioOnTrack() level (ESD), but info like cluster size need
prepRawData
First code
in CVS
However, this is
not what I want
In contact with
Edward Moyse
Soon:
Direct way to get
global position
implemented
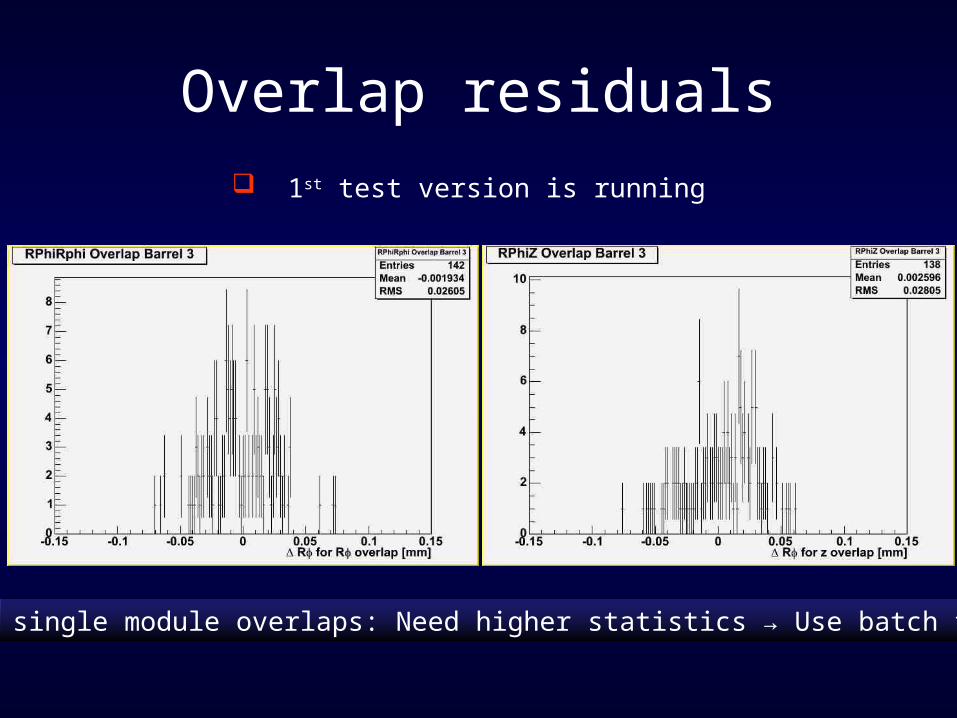
Overlap residuals 1st test version is running
For single module overlaps: Need higher statistics → Use batch farm
Next steps
Test with misalignment Solve management of histograms Get local misalignment for every module Get uncertainties Perform iterating and refitting Extend to endcaps
Wait for Tool in InDetAlignDBTool
(Richard)
Munich contribution
3D residual – distance of closest approach (DOCA)Calculate local 2 – sum over all tracksCalculate derivatives by moving modulesMinimise 1st order approximation of 2
Go one step in the right directionNo knowledge about achievable precision yet
DOCA
Possible help for
iteration and refitting
Summary - Outlook Migration started Work together with Munich First code is running Aim: Barrel version running and tested in September Still lots to do!