saufbe 17. cilt 1. sayı
DESCRIPTION
Sakarya Üniversitesi Fen Bilimleri Enstitüsü DergisiTRANSCRIPT


© 2013 Sakarya Üniversitesi Fen Bilimleri Enstitüsü
YAYIN İLKELERİ / PRINCIPLES OF PUBLICATION
1. Sakarya Üniversitesi Fen Bilimleri Enstitüsü Dergisi, Ocak 1997’de kurulmuş bir dergidir. Dergimiz 2012 yılından itibaren fen, mühendislik ve doğa bilimleri alanlarında olmak üzere düzenli olarak Nisan, Ağustos ve Aralık aylarında yılda üç sayı halindeyayımlanan bir dergidir. Yayınlanmak üzere gönderilen bütün makaleler, editör, yayın danışma kurulu ve hakemlerce değerlendirilir.
2. Dergimizde Türkçe veya İngilizce yazılmış orijinal araştırma makalesi, teknik not, editöre mektup ve derleme türünde bilimselçalışmalar yayınlanır.
3. Yalnızca özgün niteliği olan bilimsel araştırma çalışmalarına yer verilir. Bilimsel çalışmada üretilen bilginin yeni olması, yeni bir yöntem öne sürmesi ya da daha önce var olan bilgiye yeni bir boyut kazandırmış olması gibi niteliklerin aranması esastır.
4. Yayımlanmak üzere gönderilen makaleler iki veya üç hakem tarafından değerlendirilir; kabul-ret kararı Yayın Kurulu tarafından verilir. Yazıları değerlendiren hakemlerin adları yazarlara bildirilmez. Hakemlerde yazarların adlarını göremez. Yeterli görülmeyen yazılarınhakem önerileri doğrultusunda geliştirilmesi genel esastır. Amaçlanan düzeye varamayan yazılar, bilimsel açıdan yeterli görülmeyen çalışmalar gerekçesi açıklanmadan reddedilir.
5. Yayınlanması istenilen eserlerin herhangi bir yerde yayınlanmamış veya yayınlanmak üzere herhangi bir dergiye gönderilmemiş olması zorunludur. Bunun için yazarlardan makaleyi gönderdiklerinde bu durumu açıklayıcı bir ön yazı talep edilir.
6. Eserlerin tüm sorumluluğu ilgili yazarlarına aittir. Eserler uluslararası kabul görmüş bilim etik kurallarına uygun olarak hazırlanmalıdır. Gerekli hallerde, Etik Kurul Raporu'nun bir kopyası eklenmelidir.
7. Dergimize yayınlanmak üzere gönderilen makaleler 01.08.2013 tarihinden itibaren bir benzerlik kontrol programı olan ithenticate ilekontrol edilecektir. Benzerlik raporu ilgili yayın danışma kurulu üyesine kontrol etmesi için gönderilecektir.
8. Dergimizde yayınlanması kabul edilen eserler için, imzalı Telif Hakkı Devir Formu sisteme yüklenmeli ya da [email protected] e-posta adresine gönderilmelidir.
9. Dergimizde yayımlanmak üzere gönderilen eserler dergi yazım kurallarına göre hazırlanmalıdır. Yazım kuralları ve ilgili şablon www.saujs.sakarya.edu.tr adresinde mevcuttur.
10. Yayınlanan her sayının ön kapağında, o sayıdaki makalelerden yayın danışma kurulunca belirlenen bir görsel bir şekil veya grafik yer alır.
Yazı İşleri Müdürü / Editorial Director Sekreterya / Secretary
Arzu ERSÜZ Caner ERDEN
[email protected] [email protected]
Teknik Sorumlu / Technical Assistants
Mehmet Ali YAR
Web Sorumlusu / Webmaster
Sümeyye ŞEN
Yazışma Adresi / Contact Address
Sakarya Üniversitesi, Fen Bilimleri Enstitüsü, 54187, Esentepe Kampüsü, Serdivan, Sakarya, [email protected]
Basılı / Printed ISSN: 1301-4048 Elektronik / Online ISSN: 2147-835X
SAKARYA HAZİRAN 2013 / JUNE 2013
Baskı / Printed at
Sakarya Gelişim Ofset, Adnan Menderes Cad. No.22/A Adapazarı, +90 264 273 52 53, www.sakaryagelisim.com
Dergimizin Nisan 2013 tarihli 17. Cilt 1. Sayısının kapak resmi yazarları A. ÜLGEN ve N. SÜNEL olan “SOLUTION OF MACROSCOPIC STATE EQUATIONS OF BLUME-MODEL USING NONLINEAR DYNAMICS CONCEPTS” isimli makaleden alınmıştır.

SAKARYA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ DERGİSİ
Sakarya University Journal of Science
Sahibi / Owner Muzaffer ELMAS Editör / Editor in Chief Emrah DOĞAN [email protected]
Genel Yayın Yönetmeni / General Publication Director
Ali Osman KURT Yardımcı Editörler / Associate Editors
Uğursoy OLGUN [email protected]
Cüneyt BAYILMIŞ [email protected]
Beytullah EREN [email protected]
Yayın Danışma Kurulu / Editorial Advisory Board*
A. AYAR Sakarya Uni. [email protected]
C. YİĞİT Sakarya Uni. [email protected]
M. BEKTAŞOĞLU Sakarya Uni. [email protected]
S. SALUR Rochester Uni. [email protected]
A. Ç. MEHMETOĞLU Sakarya Uni. [email protected]
E. ÇELEBİ Sakarya Uni. [email protected]
M. KURT Ahi Evran Uni. [email protected]
T. ENGİN Sakarya Uni. [email protected]
A. DEMİRİZ Sakarya Uni. [email protected]
H. AKBULUT Sakarya Uni. [email protected]
M. UTKUCU Sakarya Uni. [email protected]
T. OGRAS Tübitak [email protected]
A. PINAR Boğaziçi Uni. [email protected]
H. GÖÇMEZ Dumlupınar Uni. [email protected]
M. van de VENTER Nelson Mandela Metropol. Uni [email protected]
U. KULA Sakarya Uni. [email protected]
A. S. E. YAY Sakarya Uni. [email protected]
K. KÜÇÜK Kocaeli Uni. [email protected]
N. BALKAYA İstanbul Uni. [email protected]
Y. BECERİKLİ Yalova Uni. [email protected]
A. TUTAR Sakarya Uni. [email protected]
K. YILDIZ Sakarya Uni. [email protected]
N. YUMUŞAK Sakarya Uni. [email protected]
B. D. BOTOFTE Sakarya Uni. [email protected]
K. YILDIRIM Sakarya Uni. [email protected]
Ö. KELEŞ İTÜ [email protected]
B. T. TONGUÇ Sakarya Uni. [email protected]
L. GÜLEN Sakarya Uni. [email protected]
R. MERAL Bingöl Uni. [email protected]
C. YAVUZ Sakarya Uni. [email protected]
L. KALIN Auburn Uni. [email protected]
S. OKUR İzmir Katip Çelebi Uni. [email protected]
*Bilimsel danışma kurulu alfabetik olarak sıralanmıştır.


SAKARYA ÜNİVERSİTESİ FEN BİLİMLERİ ENSTİTÜSÜ DERGİSİ
Sakarya University Journal of Science
Cilt (Vol.): 17 Sayı (No): 1 Haziran (June) 2013 SAKARYA
İÇİNDEKİLER (Contents)
Malatya’da Hayvancılık Potansiyeli ve Biyogaz Üretimi
Cattle-Dealing Potential of Malatya and Biogas Production
Nilüfer Nacar KOÇER, Gizem KURT
Veri Madenciliği Kümeleme Algoritmaları Kullanarak Arıza Dayanımlı Denetim Sistemi Tasarımı
Fault tolerant control system design by using clustering algorithms of data mining
Umut ALTINIŞIK, Mehmet YILDIRIM
Oyuk (Hollow) Fiber Sıvı Faz Mikroekstraksiyon
Hollow Fiber Liquid Phase Microextraction
Erol ALVER, Ayla DEMİRCİ, Mustafa ÖZCİMDER
Fibromiyalji Hastalarında Sempatik Deri Cevabının Psikolojik Test Skorlarına Etkisinin YSA
Kullanılarak İncelenmesi
Investigating the Effect of Sympathetic Skin Response Parameters on the Psychological Test Scores in Patients
with Fibromyalgia Syndrome by Using ANNS
Murat YILDIZ, Özhan ÖZKAN, Etem KÖKLÜKAYA
İnternet Ortamındaki Tüketici Yorumlarından Özet Bilgi Çıkarımı
Abstract Information Extraction From Consumer's Comments On Internet Media
Kadriye ERGÜN, Cemalettin KUBAT, Gültekin ÇAĞILl, Raşit CESUR
Çalışma Duruşu Analiz Yöntemleri ve Çalışma Duruşunun Kas İskelet Sistemi Rahatsızlıklarına
Etkileri
Working Posture Analysis Methods and the Effects of Working Posture on Musculoskeletal Disorders
Hatice ESEN, Nilgün FIĞLALI
Blume Capel Modelinin Mikroskopik Durum Denklemlerini Nonlinear Dinamik Kavramları
Kullanilarak Çözülmesi
Solution of Macroscopic State Equations of Blume-Capel Model Using Nonlinear Dynamics Concepts
Asaf Tolga ÜLGEN, Naci SÜNEL
Yapay Sinir Ağı Yaklaşımıyla Çinko Kalınlığının Tahminlenmesi
Forecasting of Zinc Coating Thickness with Artificial Neural Network
Tuğçen HATİPOĞLU, Semra BORAN, Burcu ÖZCAN, Alpaslan FIĞLALI
Karboksinin Gökkuşağı Alabalıklarında (Oncorhynchus Mykiss) Gulutatyon Redüktaz Enzim
Aktivitesi Üzerine Etkisi
Effects Of Carboxin On Glutathione Reductase Enzyme Activity İn Rainbow Trout (Oncorhynchus Mykiss)
Gonca ALAK, Muhammed ATAMANALP, Esat Mahmut KOCAMAN, Arzu UÇAR
Bulanık Çok Yanıtlı Deneyler İçin Bulanık Pareto Çözüm Kümesinin Bulanık İlişkiye Dayalı
Sınıflandırma Yaklaşımı İle Değerlendirilmesi
Evaluation of Fuzzy Pareto Solution Set by Using Fuzzy Relation Based Clustering Approach For Fuzzy Multi-
Response Experiments
Özlem TÜRKŞEN, Ayşen APAYDIN
1- 8
9-16
17-26
27-32
33-40
41-51
53-60
61-69
71-74
75-84

Farklı Özellikteki Malzemelerin Tozaltı Ark Kaynak Yöntemi İle Birleştirilmesi ve Birleştirmelerin
Tahribatlı ve Tahribatsız Muayenesi
Joining of Materials with Diferent Properties Through Submerged Arc Welding Process and Destructive and
Non-Destructive Testing of the Joints
Ali Akın AKAY, Yakup KAYA, Nizamettin KAHRAMAN
İşçi Sağlığı Ve Güvenliği Yönetimi İle Toplam Kalite Yönetimi Sistemleri Veri Analizi İncelemesi
Data Analysis of Occupational Health and Safety Management and Total Quality Management Systems
Ahmet YAKUT, Rıfat AKBIYIKLI
Bisfenol A’nın Zebra Balıklarında (Danio Rerio) Teratolojik Etkileri
Teratologic Effects Of Bisphenol A On Zebrafish (Danio Rerio)
Cansu AKBULUT, Nazan Deniz YÖN
Sabit Olmayan Ortalama Eğrilikli Timelike Bonnet Yüzeyler
Timelike Bonnet surfaces with non-constant curvature
Seda HATİPOĞLU, Ebru Arıkan ÖZTÜRK
3.3 Ghz Mikroşerit Anten Tasarımı Ve Farklı Besleme Yöntemleri İçin Analizi
3.3 GHz microstip antenna design and analysis for different feeding methods
Haydar KÜTÜK, Ahmet Y.TEŞNELİ, N. Berna TEŞNELİ
Bazı Pell Denklemlerinin Temel Çözümleri
Fundamental Solutions to Some Pell Equations
Merve GÜNEY, Refik KESKİN
Bulanık Yapay Sinir Ağıyla Dört Serbestlik Dereceli Bir Robot Kolunun Kontrolü
Four Degree Freedom Robot Arm with Fuzzy Neural Network Control
Şinasi ARSLAN, Mehmet KORKMAZ
Azot Ve Fosfor’un Negatif İyonlarının Temel Hallerinin İnce Yapı Seviyeleri
The fine structure levels for ground states of negative ions of nitrogen and phosphorus
Leyla ÖZDEMİR, Nurgül ATİK, Gülay Günday KONAN
Fonksiyonel Özelliklere Sahip Probiyotik İncir Uyutması Tatlısı Üretimi
Production of Probiotic İncir Uyutması Dessert Whıch Has Functional Properties
Meryem HUT, Ahmet AYAR
5 Serbestlik Dereceli Robot Kolunun Modellenmesi ve Kontrolü
Modelling and Control of 5 dof Robotic Arm
Nurettin Gökhan ADAR, Hüseyin ÖREN, Recep KOZAN
85-96
97-103
105-111
113-118
119-124
125-129
131-138
139-146
147-153
155-160
SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 1-8, 2013 SAU J. Sci. Vol 17, No 1, p. 1-8, 2013
S 1
Malatya’da hayvancılık potansiyeli ve biyogaz üretimi
Nilüfer NACAR KOÇER1*, Gizem KURT2
1*Fırat Üniversitesi Mühendislik Fakültesi Çevre Mühendisliği Bölümü, ELAZIĞ, [email protected],
2Mimar Sinan Cad. Fatih Apt. 97/15, MALATYA, [email protected]
05.12.2011 Geliş/Received, 05.12.2012 Kabul/Accepted
ÖZET
Tarım ve hayvancılık sektöründe biyogazdan enerji elde edilmesi, yıllardır gelişmiş ülkelerde başarıyla
uygulanmaktadır. Bu uygulamanın ülkemizde ve özellikle Malatya’da da yaygınlaştırılmasına katkı sağlamak üzere,
farklı hayvan sayısına bağlı olarak elde edilebilecek biyogaz miktarları, bu çalışma kapsamında tablolar halinde
sunulmuştur. Ayrıca Malatya ili için biyokütle potansiyelinden etkin ve yaygın bir şekilde faydalanmak için önerilerde
bulunulmuştur.
Yapılan çalışmada; Malatya İli’nde bir yılda elde edilen ortalama kuru biyokütle miktarı ve kuru biyokütlenin ortalama
ısıl değeri hesaplanmıştır. Sonuçlar Malatya’da ki hayvan gübresinden biyogaz tesisleri kullanılarak yaklaşık olarak
87.645 m3/gün biyogaz üretilebileceğini göstermiştir.
Anahtar Kelimeler: Biyogaz potansiyeli, ısıl değer, kuru biyokütle miktarı.
Cattle-dealing potential of Malatya and biogas production
ABSTRACT
The manufacture of biogas in the agriculture and animal husbandry industry has been practiced successfully in
developed countries for years. In order to contribute to the popularization of this practice in our country, and especially
in the Malatya city. Depending on the number animals of different amount of biogas that can achieved within the
scope of this study are presented in tables. In addition, to benefit from biomass potential efficiently and broadly for
Malatya city we have made suggestions.
In this research, average dry biomass amount per year and thermal (calorific) value of average dry biomass were
calculated in Malatya city. The results shown that approximate 87.645 m3/day biogas will be produced by using biogas
systems from manure of animals in Malatya.
Keywords: Biogas potential, thermal value, dry biomass amount.
* Sorumlu Yazar / Corresponding Author

N. N. Koçer, G. Kurt Malatya’da Hayvancılık Potansiyeli Ve Biyogaz Üretimi
2 SAU J. Sci. Vol 17, No 1, p. 1-8, 2013
1. GİRİŞ
Artan nüfusa paralel olarak, büyüyen hayvancılık
sektöründe ortaya çıkan yüksek miktarlardaki hayvansal
ve evsel atıklar, çevre için tehlike oluşturmaktadır [2]. Bu
atıkların planlı bir şekilde kontrol altına alınmaya
çalışılması, bilinçsizce tarım alanlarına veya çevreye
atılması hem toprağın biyolojik yapısını tahrip etmekte
hem de yaz aylarındaki aşırı sıcaklarda, istenmeyen koku
ve sinek oluşumu sonucunda insan ve çevre sağlığını
tehdit etmektedir.
Dünya enerji tüketiminin sadece %14’lük bir kısmının
biyokütleden sağlandığı, ancak bu oranın gelişmekte olan
ülkelerde %43’lere ulaştığı bilinmektedir. Bu yüzyılın
ortalarında dünya nüfusunun %90’ının gelişmekte olan
ülkelerde yaşadığı varsayılırsa, yenilenebilir enerji
kaynakları içerisinde biyokütle enerjisi önemli bir yer
işgal edecektir [9]. Özellikle kırsal yerleşim bölgelerinde
bol miktarda açığa çıkan bu artık organik maddelerin
değerlendirilmesi açısından biyogaz ve organik gübre
üretimi önem taşımaktadır [2].
Ülkemiz kırsal kesiminde hayvan gübresi ısıtma ve
pişirme amacıyla yakılmaktadır. Hayvan gübresinin
tarımsal üretimde kullanılması, yakılarak enerjiye
dönüştürülmesinden daha ekonomiktir. Hayvan gübresi,
yapay gübrelere göre daha üstün özelliklere sahiptir.
Toprağa bitki besin maddelerini sağlamasının yanında
toprağın yapısını da iyileştirmektedir [2].
Hayvan gübresinin yakılmasının önlenerek, tarım
topraklarına kazandırılması, kırsal kesime bu enerjinin
yerine ikame edeceği yeni bir enerjinin verilmesi ile
mümkündür. Bu enerji, hayvan gübresinden elde
edilebilecek olan biyogazdır [2].
Biyogaz bakterilerin, organik maddeleri oksijensiz
ortamda atık biyolojik maddelerin fermantasyonu sonucu
açığa çıkan, metan ve karbondioksit gazlarının
karışımından meydana gelen yanıcı bir gazdır [3,17].
Biyogaz teknolojisi çiftçiler için çok ümit vericidir.
Çünkü geçerliliği değerini arttırmaktadır. Önceden
kullanılmayan atık materyaller şimdi enerji kaynağı
olmaktadır [3]. Dünyanın pek çok ülkesinde çözüm
olması bakımından değil sadece katkıda bulunması
maksadıyla birçok yerleşim yerinde pilot ya da ferdi
biyogaz tesisi yaygın bir şekilde kullanılmaktadır [10].
Biyogaz teknolojisi özellikle gelişmiş ve gelişmekte olan
ülkelerde sürekli gündemde kalan ve önemini artıran
alternatif enerji kaynağıdır [12].
Dünyada yüzün üzerinde farklı tipte biyogaz tesisi olup,
bunlar farklı koşullarda üretimde bulunmaktadırlar.
Değişik yapı çeşitlerinde, değişik organik materyalden ve
bunlara bağlı olarak çok farklı üretim ortamlarında
çalışan bu tesisler, yine kurulu bulundukları ülkelerin
iklim ve ekonomik koşullarına adapte edilmiş biyogaz
üreteçleridir [12].
Biyogaz, kuyulardan çıkartılan doğal gaz ile tamamen
benzerdir. Fakat doğal gaz yüksek kalorifik değere sahip
etan, propan ve bütan gibi çeşitli hidrokarbonları da
kapsamaktadır [3]. Fakat biyogazın diğer enerji
yakıtlarına nazaran belli değeri ve önemi vardır. Bunlar;
Küresel ısınmaya sebep olan metan gazı, çiftlik
hayvanları aracılığı ile atmosfere karışmaktadır. İşte bu
gaz, insan kullanımına sokabilir, ayrıca mevcut çiftlik
hayvanın atıklarını işleyerek, bir enerji kaynağı haline
dönüştürebilir.
Gübreler biyogaz üretmek amaçlı işlenerek, içlerinde
bitkisel üretim için istenmeyen yabancı ot tohumları ve
olası bitki hastalık ve zararlı etmenleri yok edilebilir.
Gübrenin bitki besleyicilik değeri en az %15 oranında
artarak, bitkisel üretimde kalite yükselir ve topraklar
korunur.
Üretilen gaz, bölgedeki çiftçilerin dışa bağımlılığını
azaltarak, sürdürülebilir yaşam imkânı sunabilir [6].
2. BİYOGAZIN KULLANIM ALANLARI
Biyogazın doğal gaza alternatif bir gaz yakıt olarak
kullanılabileceği pek çok alan bulunmaktadır. Doğrudan
yakma, aydınlatma ve ısıtmada kullanım, kimyasalların
üretiminde kullanım, yakıt pili olarak kullanım, motor
yakıtı olarak kullanım, türbin yakıtı olarak kullanım ile
elektrik enerjisine ve mekanik enerjiye çevrilerek
kullanımı bunlar arasında sayılabilir. Ayrıca biyogaz
üretimi sonucu ortaya çıkan yan ürünler de çeşitli
amaçlarla kullanılabilmektedir [13].
2.1. Isıtmada Kullanım
Biyogazın yanma özelliği bileşiminde bulunan metan
(CH4) gazından ileri gelmektedir. Biyogaz, hava ile
yaklaşık 1/7 oranında karıştığı zaman tam yanma
gerçekleşmektedir. Isıtma amacıyla gaz yakıtlarla çalışan
fırın ve ocaklardan yararlanılabileceği gibi termosifon ve
şofbenlerde biyogazla çalıştırılarak kullanılabilir.
Biyogaz, sıvılaştırılmış petrol gazı ile çalışan sobaların
meme çaplarında basınç ayarlaması yapılarak kolaylıkla
kullanılabilmektedir. Biyogaz, sobalarda kullanıldığında
bünyesinde bulunan hidrojen sülfür (H2S) gazının
yanmadan ortama yayılmasını önlemek üzere bir baca
sistemi gerekli olmaktadır. Bu nedenle, daha sağlıklı bir
ısınma için kalorifer sistemleri tercih edilmektedir [7].
Malatya’da Hayvancılık Potansiyeli Ve Biyogaz Üretimi N. N. Koçer, G. Kurt
SAU J. Sci. Vol 17, No 1, p. 1-8, 2013 3
2.2. Aydınlatmada Kullanım
Biyogaz, hem doğrudan yanma ile hem de elektrik
enerjisine çevrilerek aydınlatmada kullanılabilmektedir.
Biyogazın doğrudan aydınlatmada kullanımında
sıvılaştırılmış petrol gazları ile çalışan lambalardan
yararlanılmaktadır. Bu sistemde aydınlatma alevini
arttırmak üzere amyant gömlek ve cam fanus
kullanılmaktadır. Cam fanus ışığı sabitleştirdiği gibi
çıkan ısıyı geri vererek alevin daha fazla olmasını
sağlamaktadır [7].
2.3. Motorlarda Kullanım
Biyogaz, benzinle çalışan motorlarda hiçbir katkı
maddesine gerek kalmadan doğrudan kullanılabildiği
gibi içeriğindeki metan gazının saflaştırılmasıyla da
kullanılabilmektedir. Dizel motorlarda kullanılması
durumunda belirli oranda (% 18-20) motorin ile
karıştırılması gerekmektedir [7].
2.4. Yan Ürün Değerlendirme İmkânları
Biyogaz üretimi sonucu sıvı formda fermente organik
gübre elde edilmektedir. Elde edilen gübre tarlaya sıvı
olarak uygulanabilir, granül haline getirilebilir veya
beton ve toprak havuzlarda doğal kurumaya bırakılabilir.
Fermantasyon sonucu elde edilen organik gübrenin temel
avantajı anaerobik fermantasyon sonucunda patojen
mikroorganizmaların büyük bir bölümünün yok
olmasıdır. Bu özellik kullanılacak olan organik gübrenin
yaklaşık % 10 daha verimli olmasını sağlamaktadır [14].
3. BİYOGAZIN AVANTAJLARI
Biyogazın üretilmesi ve kullanılması doğrultusunda
çeşitli avantajları mevcuttur. Bu avantajlar;
1. Biyogazın üretilmesi ve kullanılması ekonomik
kazanç sağlamaktadır.
2. Gübre kullanımı iyileşerek, gaz üretiminden sonra
elde edilen gübre daha kolay kullanılabilir gübre haline
gelmektedir.
3. Sera gazlarını azaltmaktadır ki, metan gazı en kötü
sera gazlarından birisidir. İşlem sonucunda açığa çıkan
metan atmosfere yayılmaktadır. Oysa biyogaz
tesislerinde elde edilen metan yakılmaktadır.
4. Ucuz ve çevreci atık çevrimi sağlamaktadır. Evlerde
çıkan diğer evsel katı atıklar hayvan gübresiyle birlikte
biyogaz üretiminde kullanılabilmektedir.
5. Daha sağlıklı, hijyenik yaşam alanlarının yaratılmasını
sağlamaktadır.
6. Ülkemizde hayvancılığın gelişmesini teşvik edici
unsur olmaktadır. Dolayısıyla suni gübreye bağımlılığı
azaltarak, sürdürülebilir kalkınmaya katkıda
bulunmaktadır. Ayrıca ülkemizin dışarıya olan enerji
bağımlılığını da azaltmaktadır [8].
4. MALATYA İLİ MEVCUT HAYVAN VERİLERİ
Biyokütle enerjisinin öneminden yola çıkılarak, 2011
yılında Malatya ilinin ilçelere göre mevcut olan
büyükbaş, küçükbaş ve kanatlı hayvanlarının sayısı
Tablo 1’de gösterilmiştir. Veriler Türkiye İstatistik
Kurumu 2011 yılı istatistiklerinden alınmıştır.
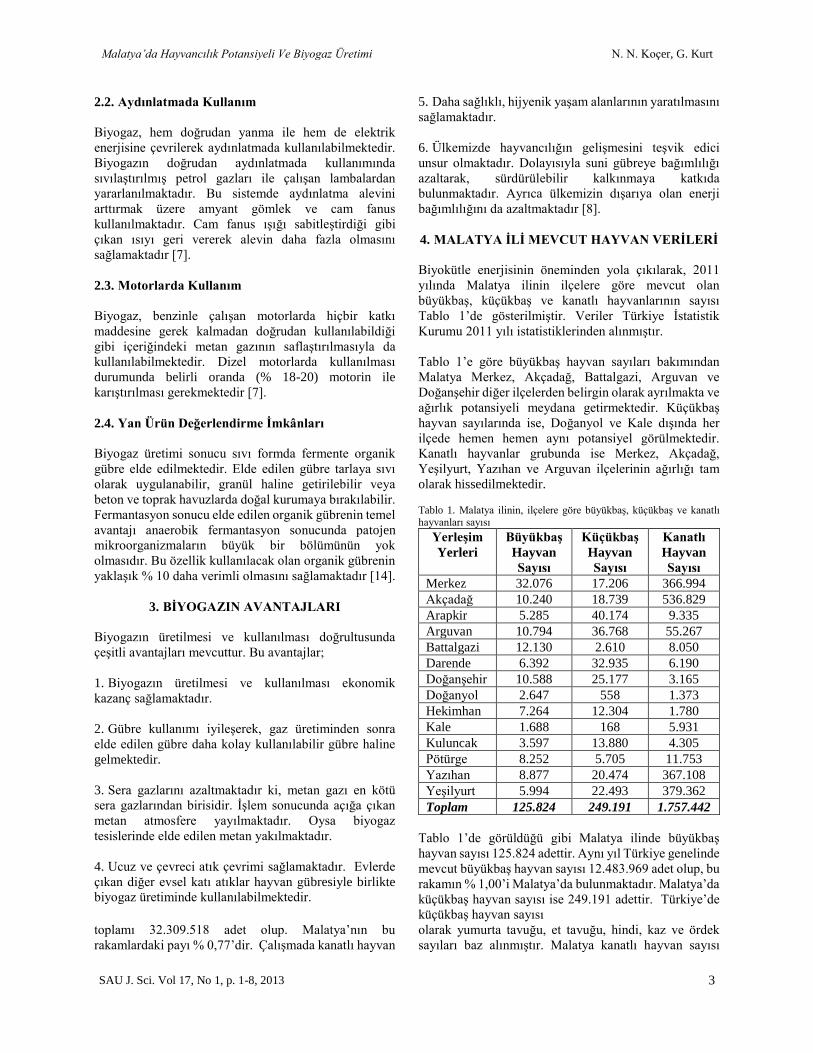
Tablo 1’e göre büyükbaş hayvan sayıları bakımından
Malatya Merkez, Akçadağ, Battalgazi, Arguvan ve
Doğanşehir diğer ilçelerden belirgin olarak ayrılmakta ve
ağırlık potansiyeli meydana getirmektedir. Küçükbaş
hayvan sayılarında ise, Doğanyol ve Kale dışında her
ilçede hemen hemen aynı potansiyel görülmektedir.
Kanatlı hayvanlar grubunda ise Merkez, Akçadağ,
Yeşilyurt, Yazıhan ve Arguvan ilçelerinin ağırlığı tam
olarak hissedilmektedir.
Tablo 1. Malatya ilinin, ilçelere göre büyükbaş, küçükbaş ve kanatlı hayvanları sayısı
Yerleşim
Yerleri
Büyükbaş
Hayvan
Sayısı
Küçükbaş
Hayvan
Sayısı
Kanatlı
Hayvan
Sayısı
Merkez 32.076 17.206 366.994
Akçadağ 10.240 18.739 536.829
Arapkir 5.285 40.174 9.335
Arguvan 10.794 36.768 55.267
Battalgazi 12.130 2.610 8.050
Darende 6.392 32.935 6.190
Doğanşehir 10.588 25.177 3.165
Doğanyol 2.647 558 1.373
Hekimhan 7.264 12.304 1.780
Kale 1.688 168 5.931
Kuluncak 3.597 13.880 4.305
Pötürge 8.252 5.705 11.753
Yazıhan 8.877 20.474 367.108
Yeşilyurt 5.994 22.493 379.362
Toplam 125.824 249.191 1.757.442
Tablo 1’de görüldüğü gibi Malatya ilinde büyükbaş
hayvan sayısı 125.824 adettir. Aynı yıl Türkiye genelinde
mevcut büyükbaş hayvan sayısı 12.483.969 adet olup, bu
rakamın % 1,00’i Malatya’da bulunmaktadır. Malatya’da
küçükbaş hayvan sayısı ise 249.191 adettir. Türkiye’de
küçükbaş hayvan sayısı
toplamı 32.309.518 adet olup. Malatya’nın bu
rakamlardaki payı % 0,77’dir. Çalışmada kanatlı hayvan
olarak yumurta tavuğu, et tavuğu, hindi, kaz ve ördek
sayıları baz alınmıştır. Malatya kanatlı hayvan sayısı

N. N. Koçer, G. Kurt Malatya’da Hayvancılık Potansiyeli Ve Biyogaz Üretimi
4 SAU J. Sci. Vol 17, No 1, p. 1-8, 2013
1.757.442’dir. Aynı yılda Türkiye’deki kanatlı hayvan
sayısı 241.498.538’dir. Malatya’nın kanatlı hayvan
sayısındaki üretim payı ise % 0,73’dür. Malatya’da
hayvansal üretim potansiyelinin Türkiye üretimindeki
payının hesaplanan değerleri Tablo 2’de verilmiştir.
Tablo 2. Malatya’da hayvansal üretim potansiyelinin Türkiye üretimindeki payı
Hayvan Cinsi Türkiye Potansiyeli Malatya Potansiyeli Üretimdeki Payı
Büyükbaş 12.483.969 125.824 % 1,00
Küçükbaş 32.309.518 249.191 % 0,77
Kanatlı 241.498.538 1.757.442 % 0,73
5. MALATYA İLİ MEVCUT HAYVANSAL ATIK
POTANSİYELİNİN ARAŞTIRILMASI
Malatya merkez ve ilçelerde mevcut hayvan
potansiyeline bağlı olarak büyükbaş, küçükbaş ve kanatlı
hayvan verileri bütün olarak değerlendirilmiştir.
Büyükbaş hayvan için günde 10 kg, küçükbaş hayvan
için günde 3 kg ve kanatlı hayvanlar için günde 0,08 kg
atık oluştuğu varsayılarak, bu atıklardan oluşan gaz
miktarı hacimsel olarak büyükbaş hayvanlar için 0,035
m3, küçükbaş hayvanlar için 0,050 m3 ve kanatlı
hayvanlar 0,044 m3 alınmıştır [16]. Malatya merkez ve
ilçelerde mevcut hayvan potansiyeline bağlı olarak
biyogaz üretim potansiyeli hesaplanarak sonuçlar Tablo
3’de verilmiştir.
6. MALATYA İLİ MEVCUT HAYVANSAL ATIK
POTANSİYELİNİN ARAŞTIRILMASI
Malatya merkez ve ilçelerde mevcut hayvan
potansiyeline bağlı olarak büyükbaş, küçükbaş ve kanatlı
hayvan verileri bütün olarak değerlendirilmiştir.
Büyükbaş hayvan için günde 10 kg, küçükbaş hayvan
için günde 3 kg ve kanatlı hayvanlar için günde 0,08 kg
atık oluştuğu varsayılarak, bu atıklardan oluşan gaz
miktarı hacimsel olarak büyükbaş hayvanlar için 0,035
m3, küçükbaş hayvanlar için 0,050 m3 ve kanatlı
hayvanlar 0,044 m3 alınmıştır [16]. Malatya merkez ve
ilçelerde mevcut hayvan potansiyeline bağlı olarak
biyogaz üretim potansiyeli hesaplanarak sonuçlar Tablo
4’de verilmiştir.
Tablo 4’e göre; mevcut hayvan potansiyelinden biyogaz
üretilecek olursa en yüksek ağırlık potansiyeline sahip
toplam gaz verimleri; Merkez ilçede, 15.100 m3/gün,
Arguvan ilçesinde ise 9.488 m3/gün olarak
hesaplanmıştır. Doğanyol ve Kale dışında diğer ilçeler de
ise gaz üretimleri hemen hemen aynı potansiyeli
göstermektedir.
7. SONUÇ VE ÖNERİLER
Günümüzde önemli çevre sorunlarından birini oluşturan
hayvansal atıkların biyogaz üretim tesislerinde
işlenerek, zararsız hale getirilmesi ve bu atıklardan enerji
elde edilmesi, yenilenebilir enerji kaynaklarının üretimi
açısından biyogaz teknolojisini ön plana çıkarmaktadır.
Ülkemizde değerlendirilebilecek organik atık
potansiyeline sahip bu atıkların gerektiği gibi
değerlendirilmesi halinde ekonomik açıdan büyük bir
girdi sağlanması söz konusudur.
Organik atık potansiyelinin değerlendirilmesi halinde
Malatya ilinin merkez ve ilçelerinde biyogaz tesisinin
inşa edilmesi ile elde edilebilecek toplam gaz verimi ile
bu sistemden faydalanacak kişi sayısı merkez ve ilçeler
bazında hesaplanmış ve sonuçlar Tablo 5’de
gösterilmiştir.
Günlük yemek pişirme ihtiyacı 0,35 m3/kişi.gün ve
günlük bir saat aydınlatma için kullanım 0,15
m3/saat.gün olarak bilindiğine göre bir ailenin beş kişiden
oluştuğu ve günlük 8 saat aydınlatma amaçlı kullanıldığı
düşünülürse toplam gaz ihtiyacı yaklaşık 3 m3/gün olarak
alınabilir [15].
Tablo 5’de görüldüğü gibi toplam faydalanacak kişi
sayısı 29.202’dir. Malatya İli ve ilçelerinde toplam
biyogaz verimi ise 87.605 m3/gün’dür. Biyogazın
optimum kullanılması ile faydalanacak nüfusun toplam
içerisindeki oranı Merkez’de % 17,24, Arguvan’da %
10,83, Yazıhan’da ise % 8,53’tür. Bu oran Doğanyol ve
Kale ilçelerinde çok düşük olmakla birlikte diğer
ilçelerde toplam içerisindeki yüzde oranı birbirleriyle
hemen hemen aynı potansiyele sahiptir.
Ülkemizin gayrisafi milli hâsılatı içerisinde büyük bir yer
teşkil eden enerji sektörü ülke adına büyük bir sorun
teşkil etmektedir. Bu nedenle enerji politikasında
değişikliklere gidilerek, bu sorun ortadan kaldırılmalı ve
ülkemizde mevcut enerji ham maddelerinden yola
çıkılarak yenilenebilir enerji kaynaklarına
yönelinmelidir.
Her şeyi devletten beklememek adına küçük yerleşim
bölgelerinde tarımla uğraşan ailelerin, en azından bir
günlük enerji ihtiyacını karşılamak, ülkenin enerji
ihtiyacını az da olsa gidermektedir. Bunun için biyogaz
üretimine ağırlık verilmeli ve bu sektörde çalışmalar
yapılarak, yeni teknolojiler geliştirilmelidir.

Malatya’da Hayvancılık Potansiyeli Ve Biyogaz Üretimi N. N. Koçer, G. Kurt
SAU J. Sci. Vol 17, No 1, p. 1-8, 2013 5
KAYNAKLAR
[1] S. Güner ve A. Albostan, “Türkiye’nin Enerji
Politikası”.
[2] Y. Ulusoy, H. Ünal ve K. Alibaş, “Biyogaz Üretimi
Prosesi”, Uludağ Üniversitesi, Bursa.
[3] N. Rajakovic and M. Knezevic, 2006. Biogas Energy
Instead of Waste, Sıxth Internatıonal Symposıum Nikola
Tesla, Belgrad, SASA, Serbıa.
[4] J. Gülen ve H. Arslan, “Biogas”, Mühendislik ve Fen
Bilimleri Dergisi, Davutpaşa, İstanbul (4/2005).
[5] K. Alibaş, Y. Ulusoy ve Y. Tekin, “Biyogaz Üretimi”.
[6] H. O. Erzincanlı, “Biyoteknolojik Enerji
Kaynaklarının Ülkemizdeki Durumu”, Biyogaz ve
Biyodizel. www.tarımsal.com
[7] N. Bilgin, “Biyogaz Nedir?”, Tarım ve Köyişleri
Bakanlığı, Köy Hizmetleri Genel Müdürlüğü, Ankara
Araştırma Enstitüsü (2003).
[8] M. Türker, “Anaerobik Biyoteknoloji: Türkiye ve
Dünya’daki Eğilimler”
[9] M. Demirtaş ve V. Gün, “Avrupa ve Türkiye’ deki
Biyokütle Enerjisi”, C.B.Ü. Fen Bilimleri Dergisi, 49
(2007).
[10] A. Akbulut ve A. Dikici, “Elazığ İlinin Biyogaz
Potansiyeli ve Maliyet Analizi”, Doğu Anadolu Bölgesi
Araştırmaları (2004).
[11] C. Tuluk, “Çeşitli Substratların Anaerobik Şartlar
Altında Metan ve Hidrojene Dönüşüm Potansiyellerinin
Belirlenmesi”, Yüksek Lisans Tezi, Çukurova
Üniversitesi, Fen Bilimleri Enstitüsü, Çevre
Mühendisliği Ana Bilim Dalı, Adana (2007).
[12] S. Sözer ve O. Yaldız, “Sığır Gübresi ve Peynir Altı
Suyu Karışımlarından Biyogaz Üretimi Üzerine Bir
Araştırma”, Akdeniz Üniversitesi Ziraat Fakültesi
Dergisi, 19(2), 179 (2006).
[13] S. Turan, “Yenilenebilir Enerji Kaynakları”, KTO-
Etüd Araştırma Servisi. www.kto.org.tr.
[14] Biyogaz ve Biyogaz Üretimi Yan Ürünlerinin
Kullanım Alanları, Elektrik İşleri Etüt İdaresi Genel
Müdürlüğü. www.eie.gov.tr.
[15] Koçer N. N. ve Saatçi Y., “Elazığ’daki Hayvansal
Atıkların Biyoenerji Potansiyeli”, Doğu Anadolu Bölgesi
Araştırmaları (2007).
[16] Kırımhan, S., 1981. Organik Atıklardan Biyogaz
Üretimi, Atatürk Üniversitesi, Çevre Sorunları Araştırma
Enstitüsü, Erzurum.
[17] Cheremisirof, P. ve Marresi, A., 1998. Generation
Of Methane in Sanitary Landfill, Energy From Solid
Wastes. Chapter 14, 327–343.

N. N. Koçer, G. Kurt Malatya’da Hayvancılık Potansiyeli Ve Biyogaz Üretimi
6 SAU J. Sci. Vol 17, No 1, p. 1-8, 2013
Tablo 3. Malatya’da hayvansal atıklardan elde edilebilecek biyogaz potansiyeli
Yerleşim
Birimleri
Hayvan
Cinsi
Hayvan
Sayısı
Hayvan
Başına Atık,
kg
1 kg Atıktan
Oluşan Gaz,
m3
1 Günlük
Atık,
kg/gün
1 Günlük
Gaz Verimi,
m3/gün
Toplam
Gaz
Verimi,
m3/gün
Merkez
Büyükbaş 32.076 10 0,035 320.760 11.227
15.100 Küçükbaş 17.206 3 0,050 51.618 2.581
Kanatlı 366.994 0,08 0,044 29.360 1.292
Akçadağ
Büyükbaş 10.240 10 0,035 102.400 3.584
8.285 Küçükbaş 18.739 3 0,050 56.217 2.811
Kanatlı 536.829 0,08 0,044 42.946 1.890
Arapkir
Büyükbaş 5.285 10 0,035 52.850 1.890
7.949 Küçükbaş 40.174 3 0,050 120.522 6.026
Kanatlı 9.335 0,08 0,044 747 33
Arguvan
Büyükbaş 10.794 10 0,035 107.940 3.778
9.488 Küçükbaş 36.768 3 0,050 110.304 5.515
Kanatlı 55.267 0,08 0,044 4.421 195
Battalgazi
Büyükbaş 12.130 10 0,035 121.300 4.246
4.666 Küçükbaş 2.610 3 0,050 7.830 392
Kanatlı 8.050 0,08 0,044 644 28
Darende
Büyükbaş 6.392 10 0,035 63.920 2.237
7.199 Küçükbaş 32.935 3 0,050 98.805 4.940
Kanatlı 6.190 0,08 0,044 495 22
Doğanşehir
Büyükbaş 10.588 10 0,035 105.880 3.706
7.494 Küçükbaş 25.177 3 0,050 75.531 3.777
Kanatlı 3.165 0,08 0,044 253 11
Doğanyol
Büyükbaş 2.647 10 0,035 26.470 926
1.015 Küçükbaş 558 3 0,050 1.674 84
Kanatlı 1.373 0,08 0,044 110 5
Hekimhan
Büyükbaş 7.264 10 0,035 72.640 2.542
4.394 Küçükbaş 12.304 3 0,050 36.912 1.846
Kanatlı 1.780 0,08 0,044 142 6
Kale
Büyükbaş 1.688 10 0,035 16.880 591
637 Küçükbaş 168 3 0,050 504 25
Kanatlı 5.931 0,08 0,044 474 21
Kuluncak
Büyükbaş 3.597 10 0,035 35.970 1.259
3.356 Küçükbaş 13.880 3 0,050 41.640 2.082
Kanatlı 4.305 0,08 0,044 344 15
Pötürge
Büyükbaş 8.252 10 0,035 82.520 2.888
3.785 Küçükbaş 5.705 3 0,050 17.115 856
Kanatlı 11.753 0,08 0,044 940 41
Yazıhan
Büyükbaş 8.877 10 0,035 88.770 3.107
7.470 Küçükbaş 20.474 3 0,050 61.422 3.071
Kanatlı 367.108 0,08 0,044 29.369 1.292
Yeşilyurt
Büyükbaş 5.994 10 0,035 59.940 2.098
6.807 Küçükbaş 22.493 3 0,050 67.479 3.374
Kanatlı 379.362 0,08 0,044 30.349 1.335

Malatya’da Hayvancılık Potansiyeli Ve Biyogaz Üretimi N. N. Koçer, G. Kurt
SAU J. Sci. Vol 17, No 1, p. 1-8, 2013 7
Tablo 4. Malatya’da hayvansal atıklardan elde edilebilecek biyogaz potansiyeli
Yerleşim
Birimleri
Hayvan
Cinsi
Hayvan
Sayısı
Hayvan
Başına Atık,
kg
1 kg Atıktan
Oluşan Gaz,
m3
1 Günlük
Atık,
kg/gün
1 Günlük
Gaz Verimi,
m3/gün
Toplam
Gaz
Verimi,
m3/gün
Merkez
Büyükbaş 32.076 10 0,035 320.760 11.227
15.100 Küçükbaş 17.206 3 0,050 51.618 2.581
Kanatlı 366.994 0,08 0,044 29.360 1.292
Akçadağ
Büyükbaş 10.240 10 0,035 102.400 3.584
8.285 Küçükbaş 18.739 3 0,050 56.217 2.811
Kanatlı 536.829 0,08 0,044 42.946 1.890
Arapkir
Büyükbaş 5.285 10 0,035 52.850 1.890
7.949 Küçükbaş 40.174 3 0,050 120.522 6.026
Kanatlı 9.335 0,08 0,044 747 33
Arguvan
Büyükbaş 10.794 10 0,035 107.940 3.778
9.488 Küçükbaş 36.768 3 0,050 110.304 5.515
Kanatlı 55.267 0,08 0,044 4.421 195
Battalgazi
Büyükbaş 12.130 10 0,035 121.300 4.246
4.666 Küçükbaş 2.610 3 0,050 7.830 392
Kanatlı 8.050 0,08 0,044 644 28
Darende
Büyükbaş 6.392 10 0,035 63.920 2.237
7.199 Küçükbaş 32.935 3 0,050 98.805 4.940
Kanatlı 6.190 0,08 0,044 495 22
Doğanşehir
Büyükbaş 10.588 10 0,035 105.880 3.706
7.494 Küçükbaş 25.177 3 0,050 75.531 3.777
Kanatlı 3.165 0,08 0,044 253 11
Doğanyol
Büyükbaş 2.647 10 0,035 26.470 926
1.015 Küçükbaş 558 3 0,050 1.674 84
Kanatlı 1.373 0,08 0,044 110 5
Hekimhan
Büyükbaş 7.264 10 0,035 72.640 2.542
4.394 Küçükbaş 12.304 3 0,050 36.912 1.846
Kanatlı 1.780 0,08 0,044 142 6
Kale
Büyükbaş 1.688 10 0,035 16.880 591
637 Küçükbaş 168 3 0,050 504 25
Kanatlı 5.931 0,08 0,044 474 21
Kuluncak
Büyükbaş 3.597 10 0,035 35.970 1.259
3.356 Küçükbaş 13.880 3 0,050 41.640 2.082
Kanatlı 4.305 0,08 0,044 344 15
Pötürge
Büyükbaş 8.252 10 0,035 82.520 2.888
3.785 Küçükbaş 5.705 3 0,050 17.115 856
Kanatlı 11.753 0,08 0,044 940 41
Yazıhan
Büyükbaş 8.877 10 0,035 88.770 3.107
7.470 Küçükbaş 20.474 3 0,050 61.422 3.071
Kanatlı 367.108 0,08 0,044 29.369 1.292
Yeşilyurt
Büyükbaş 5.994 10 0,035 59.940 2.098
6.807 Küçükbaş 22.493 3 0,050 67.479 3.374
Kanatlı 379.362 0,08 0,044 30.349 1.335

N. N. Koçer, G. Kurt Malatya’da Hayvancılık Potansiyeli Ve Biyogaz Üretimi
8 SAU J. Sci. Vol 17, No 1, p. 1-8, 2013
Tablo 5. Malatya’da biyogazdan faydalanabilecek kişi sayısı ve yüzde oranları
Yerleşim
Birimleri
Toplam Gaz
Verimi, m3/gün
Toplam Gaz
İhtiyacı, m3/gün
Faydalanacak
Kişi Sayısı
Toplam İçerisindeki
Yüzde, %
Merkez 15.100 3 5.033 17,23
Akçadağ 8.285 3 2.762 9,45
Arapkir 7.949 3 2.650 9,07
Arguvan 9.488 3 3.163 10,82
Battalgazi 4.666 3 1.555 5,32
Darende 7.199 3 2.400 8,21
Doğanşehir 7.494 3 2.498 8,55
Doğanyol 1.015 3 338 1,16
Hekimhan 4.394 3 1.465 5,01
Kale 637 3 212 0,73
Kuluncak 3.356 3 1.119 3,83
Pötürge 3.785 3 1.262 4,32
Yazıhan 7.470 3 2.490 8,52
Yeşilyurt 6.807 3 2.269 7,78
Toplam 87.645 - 29.216 100,00

SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 9-16, 2013 SAU J. Sci. Vol 17, No 1, p. 9-16, 2013
9
Veri madenciliği kümeleme algoritmaları kullanarak arıza dayanımlı denetim
sistemi tasarımı
Umut Altınışık1*, Mehmet Yıldırım2
1*Enformatik Bölümü, Kocaeli Üniversitesi, Umuttepe, 41380, Kocaeli/Türkiye
2Ağ Tabanlı Kontrol Sistemleri Laboratuvarı, Kocaeli Üniversitesi, Umuttepe, 41380, Kocaeli/Türkiye
[email protected] , [email protected]
24.04.2012 Geliş/Received, 18.12.2012 Kabul/Accepted
ÖZET
Bu çalışmada, geliştirmiş olduğumuz bir arıza dayanımlı denetim (ADD) sisteminde kullanmak üzere iki farklı
kümeleme algoritması incelenmiş ve arıza tanılama başarımları araştırılmıştır. Günümüzde kullanılmakta olan birçok
uygulamada, sistemin matematiksel modelinin tam olarak oluşturulamadığı görülmektedir. Bu nedenle bu çalışmada,
herhangi bir matematiksel modele gereksinim duyulmadan, bilgi tabanlı yöntemler kullanarak arıza tespit ve tanılaması
(ATT) yapılmıştır. ATT tarafından çevrimdışı olarak elde edilmiş tank verileri k-means algoritması ve en uzağı en
önce tara algoritması (EUEÖTA) ile ayrı ayrı kümelenerek bilgi tabanları oluşturulmuştur. Çalışmada, her iki
algoritmayla elde edilen sonuçlar karşılaştırılmış, EUEÖTA ile daha başarılı arıza dayanımı gerçekleştirilmiştir.
Anahtar Kelimeler: Arıza dayanımlı denetim, arıza tespit ve tanılama, k-means, üçlü tank, veri madenciliği
Fault tolerant control system design by using clustering algorithms of data
mining
ABSTRACT
In this study, two clustering algorithms and their success in fault isolation have been investigated in order to use in our
fault tolerant control (FTC) system. With so many applications used today, the mathematical model of the system
cannot be completely established. Therefore, in this study, fault detection and isolation (FDI) is realized by using
knowledg1e-based methods, without the need for any mathematical model. Sensor data, which are taken offline by
FDI, are clustered to create knowledge base by means of k-means and farthest first traversal algorithm (FFTA),
respectively. The results obtained by the two algorithms are compared and FFTA has found to be more successful in
fault tolerance.
Keywords: Fault tolerant control, fault detection and identification, k-means, three tank, data mining
* Sorumlu Yazar / Corresponding Author
U. Altınışık, M. Yıldırım Veri Madenciliği Kümeleme Algoritmaları Kullanarak Arıza
Dayanımlı Denetim Sistemi Tasarımı
10 SAU J. Sci. Vol 17, No 1, p. 9-16, 2013
1. GİRİŞ
Arıza dayanımlı denetim (ADD) sistemlerinin temel
amacı, algılayıcı ve eyleyici arızalarına rağmen sistemin
kararlı ve tatmin edici bir başarımla çalışmasını
sürdürmesi için uygun bir denetleyicinin tasarlanmasıdır.
ADD sistemleri, bileşen arızalarını otomatik olarak
düzeltme yeteneğine sahip denetim sistemleridir [1].
ADD sistemlerinde; sistemin güvenilirliği,
sürdürülebilirliği ve güvenlik çok önemlidir. Güvenirlik,
arıza oluşmasına rağmen sistemin başarılı bir şekilde
çalışmasıdır. Sürdürülebilirlik, arızanın kolayca
giderilebilmesi ve çalışmanın devam ettirilebilmesidir.
Güvenlik, insan sağlığı ve denetim sistemlerinin
tehlikeye atılmadan sistemin yürütülmesidir [2]. Arıza
tespit ve tanılamada (ATT) kullanılan yöntemler başlıca
iki sınıfa ayrılmaktadırlar. Bunlar, model tabanlı ve bilgi
tabanlı arıza tespit ve tanılama yöntemleridir. Doğrusal
ve doğrusal olmayan süreç yaklaşımlarında, arıza tespit
ve tanılamanın yapısı model tabanlı olarak
oluşturulurken, genellikle model öngörülü denetim (ing.
model predictive control) ve genelleştirilmiş olabilirlik
oranı (ing. generalized likelihood ratio) yöntemleri
birlikte kullanılmışlardır [3-6].
Günümüzde kullanılmakta olan birçok uygulamada,
sistemin matematiksel modelinin tam olarak
oluşturulamadığı görülmektedir. Bu nedenle,
performans ölçütünün karşılanabilmesi için, zaman
içerisinde bilgi tabanlı yöntemler geliştirilmiştir. Bilgi
tabanlı yöntemlerin kullanılmasının sağlamış olduğu en
büyük avantaj, herhangi bir matematiksel modele
gereksinim duyulmadan, arıza tespit ve tanılamasının
daha kolay yapılabilmesidir. Bilgi tabanlı arıza tespit ve
tanılamada analitik ve sezgisel bilgi tabanı yaklaşımları
söz konusudur. Analitik bilgi tabanı süreç içerisindeki
nicel ve analitik bilgilerin kullanılması ile oluşturulur.
Sezgisel bilgi tabanının oluşturulmasında ise nitel
bilgiler kullanılmaktadır [7].
Bu çalışmada, üçlü tank sıvı seviyesi denetim
sistemindeki algılayıcı arızaların tespiti ve tanılanması
yapılarak, ADD gerçekleştirilmesi amaçlanmaktadır.
Benzetim çalışmalarında kullanmak üzere PID
denetleyicili üçlü tank seviye denetim sisteminin
MatLab-Simulink modeli yapılmış, 7 adet toplamsal,
çarpımsal ve tıkama tipinde algılayıcı arızaları
oluşturulmuş, arızalar sisteme uygulanarak her bir arıza
durumuna ait sistem verileri elde edilmiştir. Kullanılan
bilgi tabanlı arıza dayanımlı denetim sistemi; ATT ve
bilgi tabanı kısımlarını içermektedir. ATT kendi
içerisinde, özellik çıkartımı ve kümeleme olmak üzere iki
aşamaya ayrılmaktadır. Geçmiş sistem verileri üzerinde
pencereleme ve varyans değişim oranı istatistiksel
teknikleri kullanılarak özellik çıkartımı yapılmaktadır.
ATT tarafından çevrimdışı olarak elde edilmiş tank
verileri k-means ve en uzağı en önce tara algoritması
(EUEÖTA) ile kümelenerek bilgi tabanı oluşturulmuş ve
her iki yöntemin başarım sonuçları karşılaştırılmıştır.
2. ARIZA DAYANIMLI DENETİM SİSTEMİ
TASARIMI
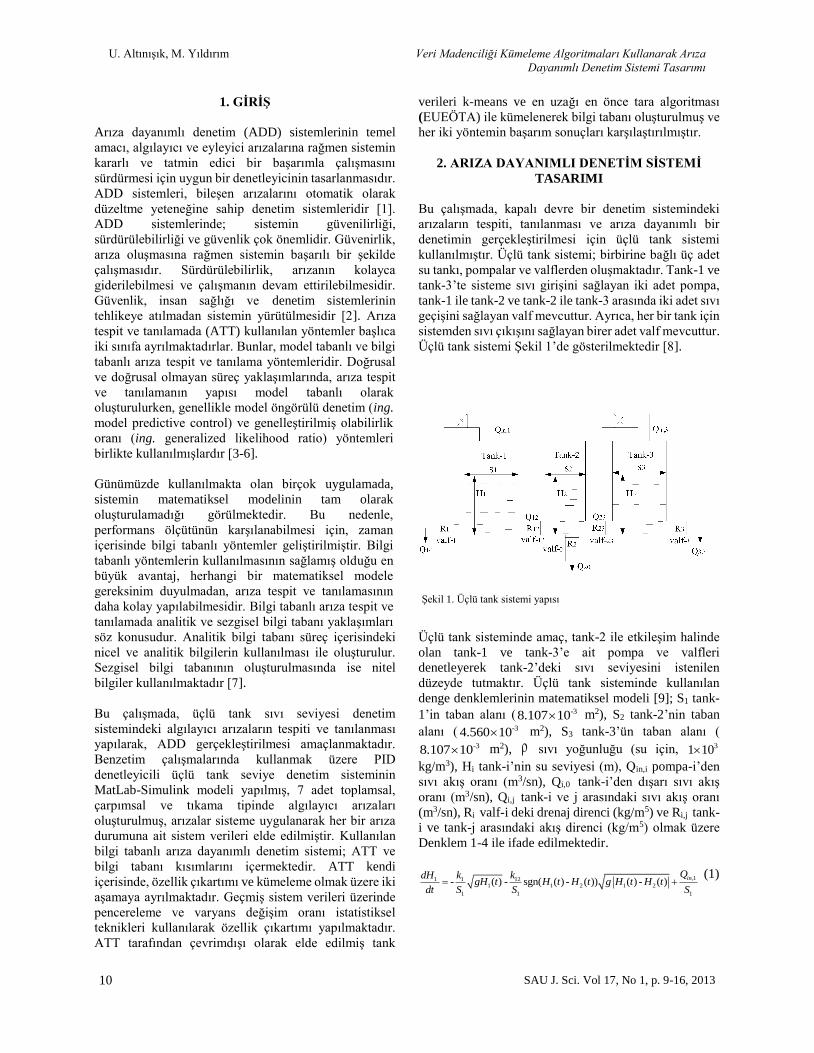
Bu çalışmada, kapalı devre bir denetim sistemindeki
arızaların tespiti, tanılanması ve arıza dayanımlı bir
denetimin gerçekleştirilmesi için üçlü tank sistemi
kullanılmıştır. Üçlü tank sistemi; birbirine bağlı üç adet
su tankı, pompalar ve valflerden oluşmaktadır. Tank-1 ve
tank-3’te sisteme sıvı girişini sağlayan iki adet pompa,
tank-1 ile tank-2 ve tank-2 ile tank-3 arasında iki adet sıvı
geçişini sağlayan valf mevcuttur. Ayrıca, her bir tank için
sistemden sıvı çıkışını sağlayan birer adet valf mevcuttur.
Üçlü tank sistemi Şekil 1’de gösterilmektedir [8].
Üçlü tank sisteminde amaç, tank-2 ile etkileşim halinde
olan tank-1 ve tank-3’e ait pompa ve valfleri
denetleyerek tank-2’deki sıvı seviyesini istenilen
düzeyde tutmaktır. Üçlü tank sisteminde kullanılan
denge denklemlerinin matematiksel modeli [9]; S1 tank-
1’in taban alanı ( -38.107 10 m2), S2 tank-2’nin taban
alanı ( -34.560 10 m2), S3 tank-3’ün taban alanı (-38.107 10 m2), sıvı yoğunluğu (su için, 31 10
kg/m3), Hi tank-i’nin su seviyesi (m), Qin,i pompa-i’den
sıvı akış oranı (m3/sn), Qi,0 tank-i’den dışarı sıvı akış
oranı (m3/sn), Qi,j tank-i ve j arasındaki sıvı akış oranı
(m3/sn), Ri valf-i deki drenaj direnci (kg/m5) ve Ri,j tank-
i ve tank-j arasındaki akış direnci (kg/m5) olmak üzere
Denklem 1-4 ile ifade edilmektedir.
,11 1 121 1 2 1 2
1 1 1
- ( ) - sgn( ( ) - ( )) ( ) - ( )inQdH k k
gH t H t H t g H t H tdt S S S
(1)
Şekil 1. Üçlü tank sistemi yapısı
Veri Madenciliği Kümeleme Algoritmaları Kullanarak Arıza
Dayanımlı Denetim Sistemi Tasarımı
U. Altınışık, M. Yıldırım
SAU J. Sci. Vol 17, No 1, p. 9-16, 2013 11
2 2 122 1 2 1 2
2 2
232 3 2 3
2
- ( ) sgn( ( ) - ( )) ( ) - ( )
- sgn( ( ) - ( )) ( ) - ( )
dH k kgH t H t H t g H t H t
dt S S
kH t H t g H t H t
S
(2)
,33 3 233 2 3 2 3
3 3 3
- ( ) sgn( ( ) - ( )) ( ) - ( )inQdH k k
gH t H t H t g H t H tdt S S S
(3)
1
1
kR
, 2
2
kR
, 3
3
kR
, 12
12
kR
, 23
23
kR
(4)
Üçlü tank sisteminde, tank-2 sıvı seviyesi bir denetleyici
ile istenilen seviyede tutulurken, tank-1 ve tank-3’e
pompalanan veya valflerle bu tanklardan dışarı atılan sıvı
akış oranları eşit kabul edilmektedir. Sıvı seviyesi, kapalı
çevrim bir denetim sisteminde, tank valflerinin PID
denetleyici ile kontrol edilmesiyle gerçekleştirilmektedir.
Benzetim çalışmalarının gerçekleştirildiği üçlü tank
sisteminin kapalı çevrim denetimi Şekil 2’de
gösterilmektedir. Sistem üzerinde kullanılan PID
denetleyicinin transfer fonksiyonu Denklem 5’de
gösterilmektedir.
Şekil 2. Üçlü tank sisteminin kapalı çevrim denetimi.
s.s
..C(s) 50
02084 (5)
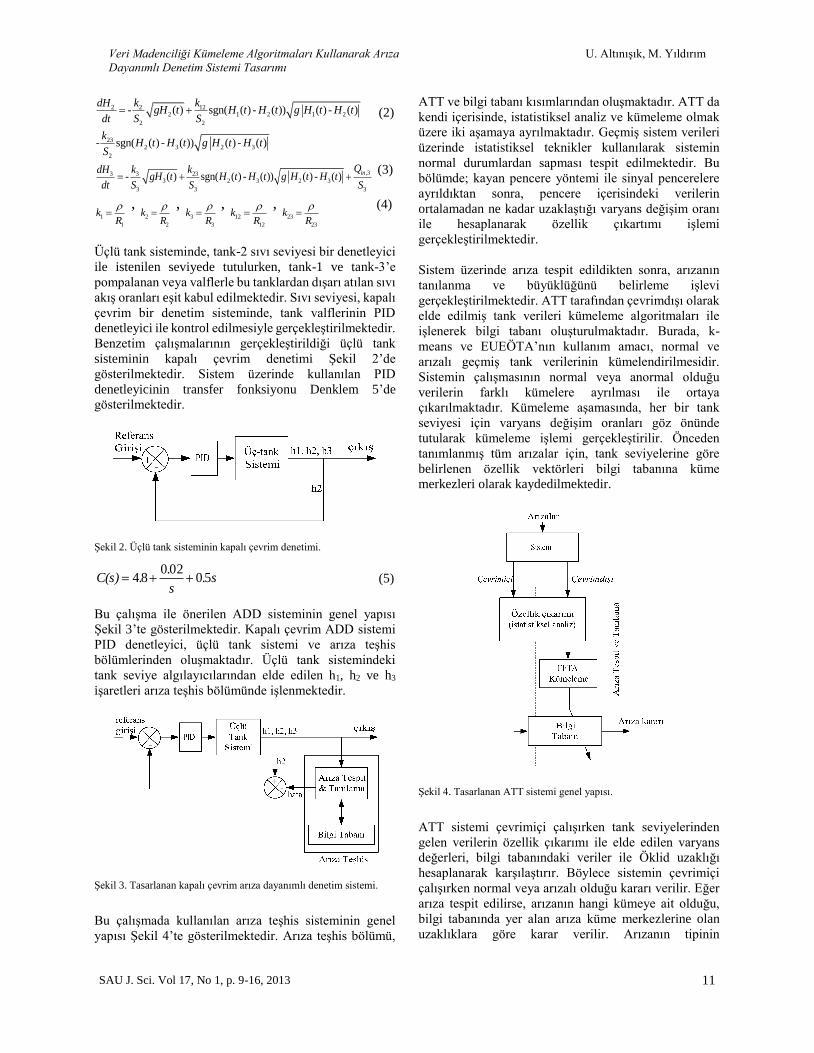
Bu çalışma ile önerilen ADD sisteminin genel yapısı
Şekil 3’te gösterilmektedir. Kapalı çevrim ADD sistemi
PID denetleyici, üçlü tank sistemi ve arıza teşhis
bölümlerinden oluşmaktadır. Üçlü tank sistemindeki
tank seviye algılayıcılarından elde edilen h1, h2 ve h3
işaretleri arıza teşhis bölümünde işlenmektedir.
Şekil 3. Tasarlanan kapalı çevrim arıza dayanımlı denetim sistemi.
Bu çalışmada kullanılan arıza teşhis sisteminin genel
yapısı Şekil 4’te gösterilmektedir. Arıza teşhis bölümü,
ATT ve bilgi tabanı kısımlarından oluşmaktadır. ATT da
kendi içerisinde, istatistiksel analiz ve kümeleme olmak
üzere iki aşamaya ayrılmaktadır. Geçmiş sistem verileri
üzerinde istatistiksel teknikler kullanılarak sistemin
normal durumlardan sapması tespit edilmektedir. Bu
bölümde; kayan pencere yöntemi ile sinyal pencerelere
ayrıldıktan sonra, pencere içerisindeki verilerin
ortalamadan ne kadar uzaklaştığı varyans değişim oranı
ile hesaplanarak özellik çıkartımı işlemi
gerçekleştirilmektedir.
Sistem üzerinde arıza tespit edildikten sonra, arızanın
tanılanma ve büyüklüğünü belirleme işlevi
gerçekleştirilmektedir. ATT tarafından çevrimdışı olarak
elde edilmiş tank verileri kümeleme algoritmaları ile
işlenerek bilgi tabanı oluşturulmaktadır. Burada, k-
means ve EUEÖTA’nın kullanım amacı, normal ve
arızalı geçmiş tank verilerinin kümelendirilmesidir.
Sistemin çalışmasının normal veya anormal olduğu
verilerin farklı kümelere ayrılması ile ortaya
çıkarılmaktadır. Kümeleme aşamasında, her bir tank
seviyesi için varyans değişim oranları göz önünde
tutularak kümeleme işlemi gerçekleştirilir. Önceden
tanımlanmış tüm arızalar için, tank seviyelerine göre
belirlenen özellik vektörleri bilgi tabanına küme
merkezleri olarak kaydedilmektedir.
Şekil 4. Tasarlanan ATT sistemi genel yapısı.
ATT sistemi çevrimiçi çalışırken tank seviyelerinden
gelen verilerin özellik çıkarımı ile elde edilen varyans
değerleri, bilgi tabanındaki veriler ile Öklid uzaklığı
hesaplanarak karşılaştırır. Böylece sistemin çevrimiçi
çalışırken normal veya arızalı olduğu kararı verilir. Eğer
arıza tespit edilirse, arızanın hangi kümeye ait olduğu,
bilgi tabanında yer alan arıza küme merkezlerine olan
uzaklıklara göre karar verilir. Arızanın tipinin

U. Altınışık, M. Yıldırım Veri Madenciliği Kümeleme Algoritmaları Kullanarak Arıza
Dayanımlı Denetim Sistemi Tasarımı
12 SAU J. Sci. Vol 17, No 1, p. 9-16, 2013
belirlenmesi işine arızanın tanılanması veya izolasyonu
adı verilmektedir. Arıza bir kez tanılandıktan sonra, o
kümedeki arızaları gidermek için önceden belirlenmiş
denetim değişikliği veya düzenlemesi işleme sokulur. Bu
aşamada genellikle anahtarlamalı denetim
kullanılmaktadır.
ATT sisteminde hem çevrimiçi hem de çevrimdışı olarak
gerçekleştirilen özellik çıkartımı, sisteminin genel
performansı üzerinde çok önemli bir role ve etkiye
sahiptir. Özellik çıkartımı kullanılarak normal ve arızalı
sistem durumlarının özellik vektörleri oluşturulur.
Özellik vektörleri çevrimdışı süreçte geçmiş sistem
verilerinin kullanılması ile elde edilirken, çevrimiçinde
ise gerçek zamanlı ölçümlerden elde edildiği dikkat
edilmesi gereken önemli bir husustur.
3. ÖZELLİK ÇIKARTIMI
Özellik çıkartımının gerçekleştirilmesinde ilk adım
olarak kayan pencere yöntemi kullanılmaktadır. Kayan
pencere yöntemi ile olası hataya bağlı geçici sinyal
değişimleri tespit edilmektedir. Bu yöntemde, sinyal
örnekleri önceden belirlenmiş boyutta pencerelere ayrılır
ve pencere içerisindeki sinyalde meydana gelen
değişiklikler gözlemlenir. Bu işlem bir süreç içerisinde
gerçekleştirilir iken, zaman ilerledikçe her bir pencere
önceden belirlenmiş boyutta kaydırılır ve yeni pencere ile
eski pencere içerisindeki özellikler karşılaştırılarak
arızalı durumlar tespit edilir. Kayan pencere yönteminin
çevrimiçi ve gerçek zamanlı uygulamalardaki kullanımı
Şekil 5’de gösterilmiştir.
Önceki pencere
Aktif pencere
Örnek veri
En son
veri bölgesi
Şekil 5. Kayan pencere tekniği.
Şekilde görüldüğü gibi, aynı uzunlukta ve birbiri ile
örtüşen iki adet veri penceresi bulunmaktadır. Bunlar,
önceki pencere ve aktif pencere olarak
isimlendirilmişlerdir. Önceki pencerede geçmiş zamanda
elde edilmiş olan veriler bulunurken, aktif pencerede son
zamanda elde edilen veriler bulunmaktadır. Kayan
pencere yönteminde, sinyalin en son örneklerinde
meydana gelen değişiklikleri içeren en güncel bilgiler,
aktif penceredeki en son veri bölgesinde barınmaktadır
[8].
Özellik çıkartımında, kayan pencere yöntemi ile sinyal
pencerelere ayrıldıktan sonra, pencere içerisindeki
verilerin ortalamadan ne kadar uzaklaştığı varyans ile
hesaplanır. Her iki pencere için de varyansların
belirlenmesinin ardından, varyansların değişim oranı (r)
Denklem 6’da gösterildiği gibi hesaplanarak özellik
çıkartımı gerçekleştirilmiş olunur. Denklemde, bölme
işleminin sonsuza gitmemesi için ε ile ifade edilen
küçük bir pozitif sayı denkleme eklenmektedir.
var var
var
Aktif pencere Önceki pencere
Önceki pencere
( ) - ( )r
( )=
+ (6)
4. ARIZALARIN KÜMELENMESİ
Bilgi tabanlı yöntemlerin, model tabanlı yönlerin yerine
kullanılması ile birlikte sistem üzerindeki geçmiş
verilerden maksimum oranda bilgi elde edilmektedir.
Veritabanlarında muhafaza edilmekte olan bu verilerden
faydalanarak her hangi bir konuda anlamlı sonuçlara
ulaşmak çok önemli bir süreçtir. Bu süreç içinde veri
madenciliği en önemli safhalardan birisidir. Veri
madenciliği, büyük ölçekli veriler arasından anlamlı
örüntülerin keşif ve analiz edilmesi süreci olarak
tanımlanmaktadır [10]. Veri madenciliği, çeşitli veri
analiz araçları kullanarak, veriler üzerinde gelecek ile
ilgili geçerli tahminler yapmamız için kullanılacak
örüntü ve ilişkilerin keşfedilmesi süreci olarak da
tanımlanmıştır [11].
Arıza tespit ve tanılamada, kümeleme yöntemleri ile veri
madenciliği yapılarak, arızanın meydana gelip gelmediği
saptanabilmektedir [12]. K-means ve türevleri yaygın
olarak kullanılan kümeleme algoritmalarıdır. Diğer
taraftan, kümeleme problemleri olan k-center ve k-
median problemlerinin çözümü için başka algoritmalar
da mevcuttur [13].
K-means algoritmasının işlem basamakları şöyledir:
1. Başlangıç küme merkezleri belirlenir. Bunun için iki
farklı yol vardır. Birinci yol nesneler arasından küme
sayısı olan k adet rasgele nokta seçilmesidir. İkinci
yol ise merkez noktaların tüm nesnelerin ortalaması
alınarak belirlenmesidir,
2. Her nesnenin seçilen küme merkez noktalarına olan
uzaklığı hesaplanır. Elde edilen sonuçlara göre tüm
nesneler k adet kümeden kendilerine en yakın olan
kümeye yerleştirilirler,
3. Oluşan kümelerin yeni merkez noktaları, o
kümedeki tüm nesnelerin ortalama değeri ile
değiştirilir,
4. Küme merkez noktaları sabitlenene kadar 2. ve 3.
adımlar tekrarlanır.
Gonzáles [14], k-center probleminin çözümü için
EUEÖTA adı verilen bir algoritma geliştirmiştir. Bu

Veri Madenciliği Kümeleme Algoritmaları Kullanarak Arıza
Dayanımlı Denetim Sistemi Tasarımı
U. Altınışık, M. Yıldırım
SAU J. Sci. Vol 17, No 1, p. 9-16, 2013 13
algoritma, maksimum küme yarıçapları maliyet
fonksiyonunu kullanarak, k adet optimum kümeyi
bulabilmektedir. EUEÖTA ile problem çözümü iki
aşamada gerçekleştirilir:
1. Herhangi bir veri noktası başlangıç noktası olarak
alınır ve bu noktaya en uzak nokta seçilir. Daha
sonra, ilk iki noktaya en uzak olan nokta seçilir ve
bu işlem k adet nokta seçilinceye kadar devam
ettirilir. Böylece, EUEÖTA k adet veri noktasını
sıralı küme merkezleri (μ1,…,μn) olarak
yapılandırmış olur.
2. Kalan diğer noktalar kendilerine en yakın k adet
seçilmiş küme merkezlerinden birine atanır. Şekil
6’da rasgele olarak belirlenmiş olan on noktanın
EUEÖTA kullanılarak üç kümeye ayrılmasının
sonucu gösterilmektedir.
Şekil 6. EUEÖTA ile on adet noktanın üç kümeye ayrıştırılması.
K-means veya EUEÖTA ile kümeleme aşamasında, her
bir tank seviyesi için varyans değişim oranları göz
önünde tutularak kümeleme işlemi gerçekleştirilir.
Önceden tanımlanmış tüm arızalar için, tank seviyelerine
göre belirlenen özellik vektörleri bilgi tabanına küme
merkezleri olarak kaydedilmektedir. ATT sistemi
çevrimiçi çalışırken, tank seviyelerinden gelen verilerin
özellik çıkarımı ile elde edilen varyans değerleri, bilgi
tabanındaki veriler ile Öklid uzaklığı hesaplanarak
karşılaştırır. Böylece sistemin çevrimiçi çalışırken
normal veya arızalı olduğu kararı verilir. Eğer arıza tespit
edilirse, arızanın hangi kümeye ait olduğu, bilgi
tabanında yer alan arıza küme merkezlerine olan
uzaklıklara göre belirlenir. Arızanın tipinin belirlenmesi
işine arızanın tanılanması veya izolasyonu adı
verilmektedir. Arıza bir kez tanılandıktan sonra, o
kümedeki arızaları gidermek için önceden belirlenmiş
denetim değişikliği veya düzenlemesi işleme sokulur.
5. ÜÇLÜ TANK SİSTEMİ İÇİN DENEYSEL
ÇALIŞMA
Üçlü tank sistem modeline, Tablo 1’de yer alan, yapay
algılayıcı arızaları [9] uygulanarak, arızaların sistem
üzerindeki etkileri gözlemlenmiş ve bilgi tabanı
oluşturmak üzere, her bir arıza durumuna ait sistemin
verileri elde edilmiştir. Tablodaki yapay algılayıcı
arızaları 30. saniyede birer birer üçlü tank sistemine
uygulanmış; her bir arıza durumunda tank-1, tank-2 ve
tank-3’ün gerçek seviyeleri, algılayıcılar vasıtasıyla
ölçülen seviyeleri ve PID denetleyicisinin ürettiği
denetim işaretleri 60 saniye süresince 6000 örnek olarak
sistemden alınmış ve analizleri yapılmıştır.
Tablo 1. Algılayıcı arızaları ve özellikleri
Tablo 1’deki tüm arıza durumları için benzetim çalışması
sonuçlarında elde edilen veriler pencerelenerek
gözlemleme işlemi gerçekleştirilmiştir. Pencereleme
safhasında, pencerelenen işaretin genişliği 60, son veri
bölgesi genişliği ise 20 örnek olarak alınmıştır.
Pencereleme işlemi gerçekleştirilirken, her bir pencere
son veri bölgesi genişliği kadar kaydırılmaktadır. Şekil
7’de, normal ve tüm arıza durumları için arızanın
görüldüğü pencereler gösterilmektedir.
Şekil 7. Tanklara ait seviye algılayıcılarından alınan işaretlerin
pencerelenmesi
Özellik çıkartımı yapılmasının ardından, kümeleme
yöntemi kullanılarak, sistemden alınan geçmiş veriler
kümelere ayrıştırılmakta ve küme merkezleri
bulunmaktadır. Tablo 1 ile verilen algılayıcı arızalarına
ait küme merkezleri k-means ve EUEÖTA ile sırasıyla

U. Altınışık, M. Yıldırım Veri Madenciliği Kümeleme Algoritmaları Kullanarak Arıza
Dayanımlı Denetim Sistemi Tasarımı
14 SAU J. Sci. Vol 17, No 1, p. 9-16, 2013
Tablo 2 ve Tablo 3’deki gibi belirlenmiştir. Sistem
üzerinde arızanın hangi kümeye ait olduğu, en kısa Öklid
uzaklığına göre tespit edildikten sonra, ilgili kümeye ait
önceden belirlenmiş arızanın düzeltilmesi işlemi
gerçekleştirilmektedir
Tablo 2. K-means ile bulunan arıza küme merkezleri.
Tablo 3. EUEÖTA ile bulunan arıza küme merkezleri.
Tasarlanan ADD sistemi ile tank-1, tank-2 ve tank-3
algılayıcı arızaları ile ilgili olarak; arızanın tipi,
büyüklüğü ve hangi tankta meydana geldiği tam olarak
tespit edilebilmektedir. Tablo 1’de verilmiş olan A2, A4,
A5 ve A6 numaralı arızalar tank-1 ve tank-3
algılayıcılarında meydana geldiği için, arıza öncesi ve
sonrası tankların gerçek seviyeleri değişmemektedir.
Bunun sebebi, üçlü tank sisteminde amaç tank-2’nin
seviyesini sabit tutmak olduğundan, tank-2 ölçülen
seviyesinde herhangi bir değişme olmadığı sürece
denetleyici tank-2 seviyesine müdahale etmek
maksadıyla tank-1 ve tank-3 seviyelerini
değiştirmemektedir.
Bu nedenle, tank-1 ve tank-3 algılayıcı arızaları tespit
edildiğinde, herhangi bir arıza düzeltme işlemi
yapılmamaktadır. Bu arızaların tümünde, sistemin arıza
dayanımlı ve dayanımsız olarak vermiş olduğu cevaplar
aynı olduğundan, örnek olarak sadece A5 numaralı tank-
3 arızası Şekil 8’de gösterilmektedir.
Şekil 8 (a). A5 numaralı arıza için arıza dayanımsız denetim.
(b). A5 numaralı arıza için arıza dayanımlı denetim.
Tablo 1’de verilmiş olan A1, A3 ve A7 numaralı tank-2
arızaları uygulandığında ise, tank-2 seviyesini korumak
amacıyla PID denetleyicisinin devreye girmesi
sonucunda, arıza dayanımsız denetimde tankların
tümünün gerçek seviyelerinin değiştiği
gözlemlenmektedir. Arıza dayanımlı denetimde ise, bu
arızalar, kümeleme algoritması ile tespit edilen arıza
kümelerine göre düzeltilmekte ve tankların seviyeleri
referans değeri ile aynı seviyede, doğru olarak
ölçülmektedir. A1 numaralı tank-2 arızasında, sistemin
arıza dayanımsız denetim ve arıza dayanımlı denetim
koşullarında vermiş olduğu cevaplar Şekil 9’da
gösterilmektedir.
Örnek olarak; Tank-2 üzerinde, A1 numaralı toplamsal -
0.1 arızası 30. saniyede uygulandığında, arıza
dayanımsız sistemde, Şekil 9.a’da görüldüğü gibi, gerçek
seviyede herhangi bir değişim olmamasına rağmen, tank-
2 algılayıcısı arıza sonrasında 0.2m ölçüm
göstermektedir. PID denetleyicisi arızalı 0.2m’lik ölçüm
değerini yeniden referans girişi ile aynı seviyeye
getirebilmek için tank-1 ve tank-3 seviyelerini dolayısı
ile de tank-2 seviyesini 0.1m artırmaktadır. Hatalı
düzeltme işleminden sonra, her üç tankın da gerçek
seviyeleri 0.4m olmasına rağmen, tank-1 ve tank-3
algılayıcıları 0.4m ölçüm gösterirken tank-2 algılayıcısı
0.3m ölçüm göstermektedir. Şekil 9.b’de ise, arıza
dayanımlı denetim ile arızanın tank-2 toplamsal -0.1
arıza kümesine ait olduğu yaklaşık 0.2 saniye içerisinde
tespit edilebilmektedir. Arıza sonrasında, tank-2 seviye
algılayıcısı 0.2m’lik hatalı ölçümü sürdürür iken, tank-1,
tank-2 ve tank-3 gerçek seviyeleri arıza düzeltme işlemi
sonucunda 0.3m’lik referans girişi ile aynı değerde ve
doğru olarak gözlenmektedir.
Veri Madenciliği Kümeleme Algoritmaları Kullanarak Arıza
Dayanımlı Denetim Sistemi Tasarımı
U. Altınışık, M. Yıldırım
SAU J. Sci. Vol 17, No 1, p. 9-16, 2013 15
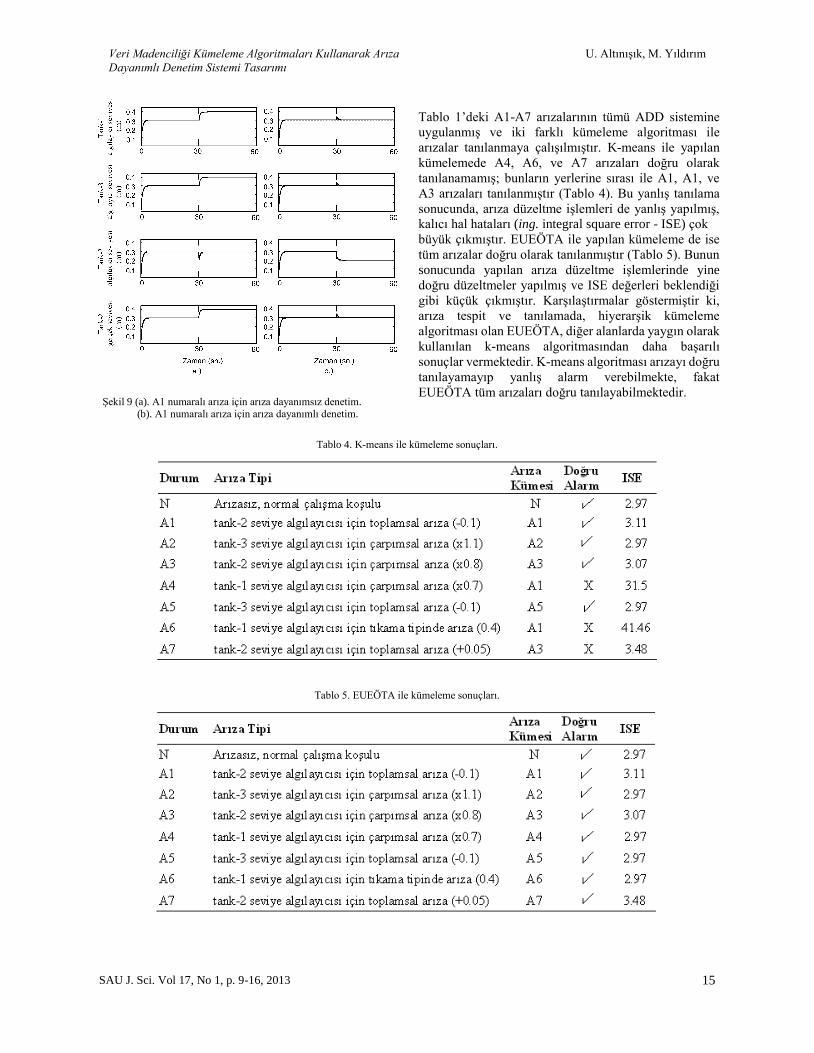
Şekil 9 (a). A1 numaralı arıza için arıza dayanımsız denetim. (b). A1 numaralı arıza için arıza dayanımlı denetim.
Tablo 1’deki A1-A7 arızalarının tümü ADD sistemine
uygulanmış ve iki farklı kümeleme algoritması ile
arızalar tanılanmaya çalışılmıştır. K-means ile yapılan
kümelemede A4, A6, ve A7 arızaları doğru olarak
tanılanamamış; bunların yerlerine sırası ile A1, A1, ve
A3 arızaları tanılanmıştır (Tablo 4). Bu yanlış tanılama
sonucunda, arıza düzeltme işlemleri de yanlış yapılmış,
kalıcı hal hataları (ing. integral square error - ISE) çok
büyük çıkmıştır. EUEÖTA ile yapılan kümeleme de ise
tüm arızalar doğru olarak tanılanmıştır (Tablo 5). Bunun
sonucunda yapılan arıza düzeltme işlemlerinde yine
doğru düzeltmeler yapılmış ve ISE değerleri beklendiği
gibi küçük çıkmıştır. Karşılaştırmalar göstermiştir ki,
arıza tespit ve tanılamada, hiyerarşik kümeleme
algoritması olan EUEÖTA, diğer alanlarda yaygın olarak
kullanılan k-means algoritmasından daha başarılı
sonuçlar vermektedir. K-means algoritması arızayı doğru
tanılayamayıp yanlış alarm verebilmekte, fakat
EUEÖTA tüm arızaları doğru tanılayabilmektedir.
Tablo 4. K-means ile kümeleme sonuçları.
Tablo 5. EUEÖTA ile kümeleme sonuçları.

U. Altınışık, M. Yıldırım Veri Madenciliği Kümeleme Algoritmaları Kullanarak Arıza
Dayanımlı Denetim Sistemi Tasarımı
16 SAU J. Sci. Vol 17, No 1, p. 9-16, 2013
6. SONUÇLAR VE TARTIŞMA
Bu çalışmada, üçlü tank sıvı seviyesi denetim
sistemindeki algılayıcı arızaların tespiti ve tanılanması
yapılarak, arıza dayanımlı denetim gerçekleştirilmiştir.
Üçlü tank sisteminin benzetimini yapabilmek ve ihtiyaç
duyulan arıza verilerini elde edebilmek için, PID
denetleyicili üçlü tank seviye denetim sisteminin
MatLab-Simulink modeli yapılmıştır. Çalışmada
kullanılmış olan ADD sisteminin genel yapısı PID
denetleyici, üçlü tank sistemi ve arıza teşhis
bölümlerinden oluşmaktadır. Arıza teşhis sistemi ATT ve
bilgi tabanı kısımlarını içermektedir. Geçmiş sistem
verileri üzerinde istatistiksel teknikler kullanılarak
özellik çıkartımı yapılmaktadır. ATT tarafından
çevrimdışı olarak elde edilmiş tank verileri, k-means ve
hiyerarşik bir kümeleme yöntemi olan EUEÖTA ile
kümelenerek bilgi tabanı oluşturulmuştur. ATT sistemi
çevrimiçi çalışırken, tank algılayıcılarından gelen
verilerin varyans değişim oranları ile bilgi tabanında yer
alan küme merkezleri arasındaki Öklid uzaklıkları
karşılaştırılarak, arıza tespit edilmekte ve
tanılanmaktadır. Çalışmada, farklı özelliklerde 7 adet
arıza üretilerek, ADD sistemine uygulanmış ve
kümeleme algoritmalarının başarımı belirlenmeye
çalışılmıştır. EUEÖTA, arıza tespit ve tanılamada,
yaygın olarak kullanılan k-means algoritmasından daha
başarılı sonuçlar vermiştir. K-means yanlış alarm
verebilmiş, fakat EUEÖTA tüm arızaları doğru
tanılayabilmiştir. Uygulamalar sonucunda, EUEÖTA ile
her bir arızanın yaklaşık olarak 0.2 saniye içerisinde
tespit edildiği gözlenmiştir.
Her bir arıza için özellik vektörünü oluşturan varyans
değişim oranları küme merkezi olarak kabul
edilmektedir. Ancak, k-means sabit kalması gereken
küme merkezlerini doğası gereği her iterasyonda
değiştirerek güncellemektedir. Bu nedenle, k-means
çevrimiçi olarak elde edilen özellik vektörlerini
güncellenmiş küme merkezleri ile karşılaştırdığı için
arızaları yanlış kümeleyebilmektedir.
KAYNAKLAR
[1] Zhang, Y., Jiang, J., “Bibliographical review on
reconfigurable fault-tolerant control systems”, Annual
Reviews in Control, Vol. 32-2, 229-252, (2008).
[2] Stengel, R., F., “Intelligent failure-tolerant control”,
IEEE Control Systems Magazine , Vol. 11-4, 14-23,
(1991).
[3] Patwardhan, S., C., Manuja, S., Narasimhan, S., Shah,
S., L., “From data to diagnosis and control using
generalized orthonormal basis filters, Part II: model
predictive and fault tolerant control”, Journal of Process
Control, Vol 16, 157-175, (2006).
[4] Prakash, J., Patwardhan, S., C., Narasimhan, S., “A
supervisory approach to fault tolerant control of linear
multivariable systems”, Industrial Engineering.
Chemistry Research, Vol 41, 2270–2281, (2002).
[5] Zhang, X., Parisini, T., Polycarpou, M., M.,
“Adaptive fault-tolerant control of nonlinear uncertain
systems: An information-based diagnostic approach”,
IEEE Transactions on automatic Control, Vol 49,
1259–1274, (2004).
[6] Deshpande, A., P., Patwardhan, S., C., Narasimhan,
S., “Intelligent state estimation for fault tolerant
nonlinear predictive control”, Journal of Process
Control, Vol 19, 187-204, (2009).
[7] Isermann, R., “On fuzzy logic applications for
automatic control, supervision, and fault diagnosis”,
IEEE Transactions on Systems, Man, and
Cybernetics- Part A: Systems and Humans, Vol. 28-2,
221-235, (1998).
[8] Xu, Z., “Design of Knowledge-based Fault Detection
and Identification for Dynamical Systems” Yüksek
Lisans Tezi, University of Alberta, Canada, (2002).
[9] Postalcioğlu, S., “İşaret İşleme ve Yapay Zeka
Tabanlı Arıza Dayanımlı Denetleyici Tasarımı”, Doktora
Tezi, Kocaeli Üniversitesi Fen Bilimleri Enstitüsü,
İzmit, (2007).
[10] Berry, M., J., A., Linoff, G.,. Data Mining
Techniques: For Marketing, Sales and Customer
Support, Second Edition, Wiley Publishing, ,165-209,
(1997).
[11] Introduction to Data Mining and Knowledge
Discovery [online], Third Edition, Two Crows
Corporation, USA, http://www.twocrows.com/intro-
dm.pdf, (Ziyaret Tarihi: 30 Mayıs 2011).
[12] Detroja, K., P., Gudi, R., D., Patwardhan, S., C., “A
possibilistic clustering approach to novel fault detection
and isolation”, Journal of Process Control, Vol. 16,
1055-73, (2006).
[13] Dasgupta, S., Long, P., M., “Performance
guarantees for hierarchical clustering”, Journal of
Computer System Sciences , Vol. 70, 555-569, (2005).
[14] Gonzalez, T., F., “Clustering to minimize the
maximum intercluster distance”, Theoretical Computer
Sciences , Vol. 38, 293-306, (1985).

SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 17-26, 2013 SAU J. Sci. Vol 17, No 1, p. 17-26, 2013
17
Oyuk (hollow) fiber sıvı faz mikroekstraksiyon
Erol ALVER1*, Ayla DEMİRCİ2, Mustafa ÖZCİMDER2
1*Hitit Üniversitesi Mühendislik Fakültesi Kimya Mühendisliği Bölümü 19030 ÇORUM
2Kırıkkale Üniversitesi, Fen-Edebiyat Fakültesi, Kimya Bölümü, 71450, Yahşihan, KIRIKKALE,
16.05.2012 Geliş/Received, 23.12.2012 Kabul/Accepted
ÖZET
Matriks örneklerdeki (biyolojik, çevresel, gıda vb.) madde veya maddelerin kalitatif veya kantitatif tayinlerinde yüksek
hassasiyetli analitik cihazlar geliştirilmesine rağmen, analitik cihaz çoğunlukla matriks ortamında tayinde başarısız
olmaktadır. Bundan dolayı matriks ortamdan maddenin alınması (saflaştırma) ve deriştirilmesi (zenginleştirme) için
genellikle ön işlem uygulanması gerekmektedir. Sıvı-sıvı ekstraksiyon (LLE) örnek hazırlamada yaygın bir şekilde
kullanılmaktadır. Son yıllarda sıvı-sıvı ekstraksiyonda kullanılan organik çözücü miktarını minimize eden, sıvı faz
mikroekstraksiyon (LPME) yöntemleri geliştirilmiştir. Bu yöntemlerden oyuk (hollow) fiber sıvı faz
mikroekstraksiyon (HF–LPME) yaygın bir şekilde kullanılmaktadır.
Anahtar Kelimeler: Oyuk (hollow)fiber sıvı faz mikroekstraksiyon, HF–LPME, Örnek hazırlama, Organik kirleticiler
Hollow fiber liquid phase microextraction
ABSTRACT
Even though high precision analytical devices are developed in qualitative and quantitative determination of substance
or substances in matrix samples (biological, environmental, food etc.), analytical devices mostly fail determining in
matrix environment. Due to such reasons, clean-up process is needed to take (purification) and concentrate
(enrichment) the substance in matrix environment. Liquid-liquid (LLE) extraction is commonly used in preparation of
the samples. In recent years, liquid phase micro extraction (LPME) methods minimizing organic solvent used in liquid-
liquid extraction are developed. Of these methods, hollow fiber liquid phase micro extraction (HF–LPME) is widely
used.
Keywords: Hollow fiber liquid phase microextraction, HF–LPME, Sample preparation, Organic pollutants
1. GİRİŞ
Gaz kromatograf (GC), yüksek basınç sıvı kromatograf
(HPLC) ve kapiler elektroforez (CE) gibi hassas analitik
cihazlar ile analiz öncesi örneğin hazırlanması önemli bir
basamaktır. Çoğu zaman örnek içindeki maddelerin
analiz öncesi saflaştırılması ve zenginleştirilmesi
gerekmektedir. Sıvı-sıvı ekstraksiyon (LLE) yöntemi
maddelerin bulundukları ortamdan geri kazanılmasında
* Sorumlu Yazar / Corresponding Author
(zenginleştirme) ve saflaştırılmasında yaygın bir şekilde
kullanılmaktadır [1,2]. Yöntem, maddelerin sulu
örneklerden, su ile
karışmayan organik çözücü yardımı ile ekstrakte
edilmesine dayanır. Örneğin ve toksik organik
çözücünün fazla kullanılması, çevre dostu olmaması,
zaman alıcı ve çok basamaklı olması gibi dezavantajlara
sahiptir [2,3]. Bir diğer örnek hazırlama yöntemi katı faz

E. Alver, A. Demirci, M. Özcimder Oyuk (Hollow) Fiber Sıvı Faz Mikroekstraksiyon
18 SAU J. Sci. Vol 17, No 1, p. 17-26, 2013
ekstraksiyondur (SPE). Katı bir adsorban üzerinde hedef
maddelerin alıkonması, ardından bu maddelerin uygun
bir çözücü yardımı ile geri alınması temeline dayanır.
Adsorban olarak silika, alumina, florosil, C8 ve C18 gibi
adsorbanlar kullanılır. SPE, LLE’ ye göre daha az çözücü
gerektirmesine rağmen kullanılan toksik çözücü yinede
önemli miktardadır. Ekstrakt hacmini azaltmak için ek
bir basamak gerekmektedir gereklidir. SPE ve LLE’ de
fazla kullanılan örnek ve organik çözücü miktarlarını
minimize etmek için yeni yöntemler geliştirilmiştir [4,5].
Bu amaçla 1990 yılında Pawliszyn ve arkadaşları
tarafından örneğin ekstraksiyonunda çözücü
gerektirmeyen, mikro düzeyde çözücü veya çözücü
kullanmadan desorpsiyona imkân sağlayan katı faz
mikroekstraksiyon (SPME) yöntemi geliştirilmiştir [6].
1993 yılında ise ticari olarak üretilmeye başlanmıştır [7].
SPME’de maddeler gaz veya sulu örneklerden “fused”
silika üzerine kaplı polimer fibere ekstrakte edilir. Fiber
olarak polidimetilsiloksan (PDMS), divinilbenzen
(DVB), poliakrilat (PA), carboxen (CAR) ve carbowax
(CW) gibi polimerler ya da bunların farklı bileşimlerdeki
karışımları kullanılabilir [7-9].
Yöntem basit, taşınabilir, hızlı, çözücüden bağımsız ve
otomasyona uygundur. Ancak fiberin kırılması,
kaplamasının sıyrılması, iğnesinin eğilmesi, pahalı oluşu
[10], kullanım sayısındaki sınırlama [11], termal
desorpsiyonda (GC) nispeten düşük sıcaklık aralığında
çalışma (genellikle 240–280˚C) gerektirmesi, HPLC ile
kullanımda fiberlerin organik çözücü ile temasta
kararsızlıkları, düşük tekrarlanabilirlik (repeatability) ve
seçicilik gibi dezavantajlara sahiptir [9].
Örnek hazırlamada yeni bir alternatif oluşturmak için
hızlı, ucuz, uygulaması basit, toksik ve pahalı organik
çözücü kullanımını minimize eden, sıvı faz
mikroekstraksiyon (LPME) yöntemleri geliştirilmiştir.
Sıvı faz mikroekstraksiyon yöntemlerinin ilk uygulaması
asılı damla mikroekstraksiyon (single drop
microextraction, SDME) şeklinde olmuştur [4,12-16].
SDME yöntemi ekstraksiyon fazının tek bir damla
olduğu LPME yöntemidir. Sıvı veya gaz fazdaki
maddeler mikro enjektör ucunda asılı duran ve su ile
karışmayan damla (1–10 µL) formundaki ekstraksiyon
fazına alınır. Ekstraksiyon sonrası organik damla mikro
enjektöre geri çekilerek GC, HPLC ve CE gibi analitik
cihazlar ile analiz edilir [4,12,14,17]. SDME;
Doğrudan Daldırma-Asılı Damla Mikroekstraksiyon
(Direct Immersion-Single Drop Microextraction, DI–
SDME), [12,18],
Tepede-Asılı Damla Mikroekstraksiyon (Headspace
Single Drop Microextraction HS–SDME) [19],
Üçlü Faz-Asılı Damla Mikroekstraksiyon (Three
Phase-Single Drop Microextraction, Three Phase–
SDME) [20],
Sürekli-Akış Mikroekstraksiyon (Continuous
Flow Microextraction, CFME) [21] olarak isimlendirilen
yöntemler şeklinde uygulanmaktadır.
SDME, uygulaması kolay, mikro düzeyde organik
çözücü kullanan düşük maliyetli ve hızlı bir ekstraksiyon
tekniği olmasına rağmen yüksek karıştırma hızlarında
damlanın kopması önemli bir dezavantajdır [13,22-24].
2. OYUK (HOLLOW) FİBER SIVI FAZ
MİKROEKSTRAKSİYON ( HF–LPME)
Oyuk (Hollow) Fiber Sıvı Faz Mikroekstraksiyon (HF–
LPME) yöntemi 1999 yılında Pedersen-Bjergaard and
Rasmussen tarafından geliştirilmiştir [25]. Yöntemde
sulu çözelti içerisindeki hedef maddeler, gözenekli
polipropilen hollow fiberin duvarlarına emdirilmiş
organik çözücü yardımıyla fiberin içerisindeki alıcı faza
ekstrakte edilir. Ekstraksiyon çözeltisi fiber içersine
hapsedilerek ekstraksiyon süresince ekstraksiyon
sıvısının kararlılığı artırılmıştır. Ekstraksiyon
işlemlerinde fiber olarak büyük çoğunlukla polipropilen
hollow fiber kullanılır. Literatürde fiber olarak
poliviniliden diflorürün de (PVDF) kullanıldığı
çalışmalar da bulunmaktadır[26-28]. Şekil 1’de
polipropilen fiberin duvar kesiti görülmektedir. Fiberin
çapı 600 µm, duvar kalınlığı 200 µm dir. % 70 oranında
gözenekli olan fiberin gözenek çapı 200µm dir.
Şekil 1. Polipropilen Hollow Fiberin Duvar Kesiti [29].
Ekstraksiyonda kullanılan fiber, ya çubuk şeklinde (Şekil
2) bir ucu kapalı, diğer ucu mikro enjektöre takılı ya da
her iki ucu mikro enjektör ile bağlantılı “U” şeklinde
(Şekil 3) hazırlanarak örnek içerisine yerleştirilebilir
[25,26].
Oyuk (Hollow) Fiber Sıvı Faz Mikroekstraksiyon E. Alver, A. Demirci, M. Özcimder
SAU J. Sci. Vol 17, No 1, p. 17-26, 2013 19
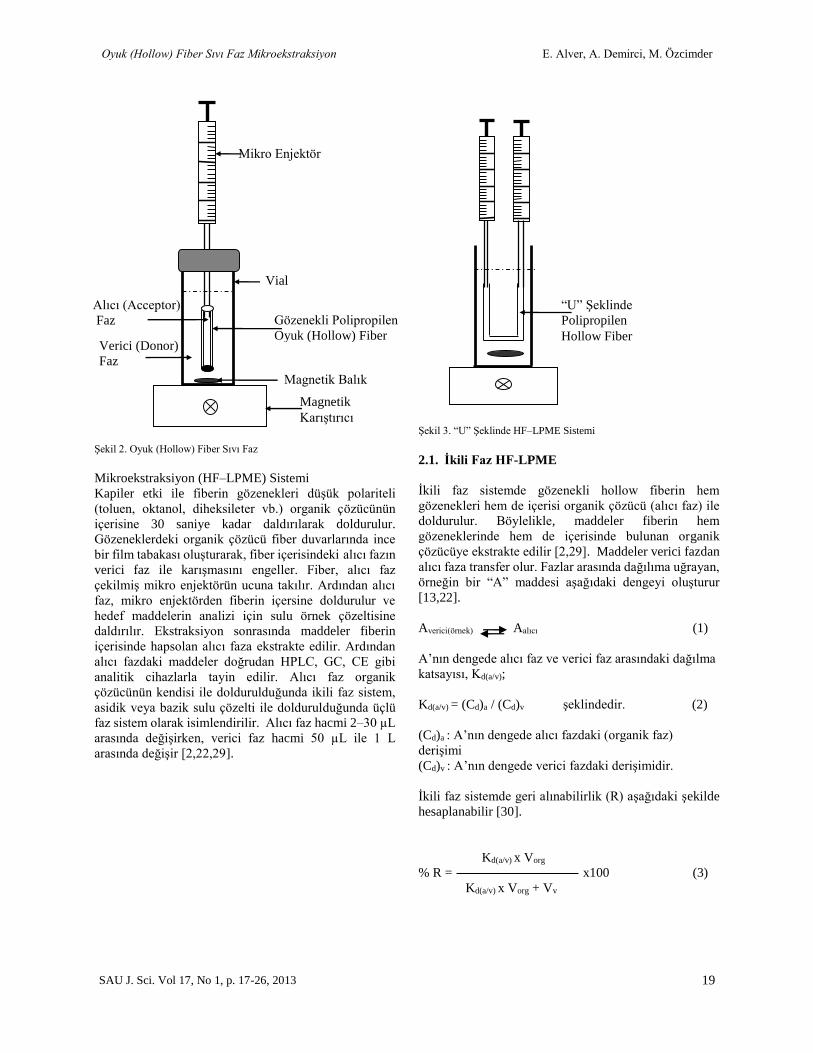
Şekil 2. Oyuk (Hollow) Fiber Sıvı Faz
Mikroekstraksiyon (HF–LPME) Sistemi
Kapiler etki ile fiberin gözenekleri düşük polariteli
(toluen, oktanol, diheksileter vb.) organik çözücünün
içerisine 30 saniye kadar daldırılarak doldurulur.
Gözeneklerdeki organik çözücü fiber duvarlarında ince
bir film tabakası oluşturarak, fiber içerisindeki alıcı fazın
verici faz ile karışmasını engeller. Fiber, alıcı faz
çekilmiş mikro enjektörün ucuna takılır. Ardından alıcı
faz, mikro enjektörden fiberin içersine doldurulur ve
hedef maddelerin analizi için sulu örnek çözeltisine
daldırılır. Ekstraksiyon sonrasında maddeler fiberin
içerisinde hapsolan alıcı faza ekstrakte edilir. Ardından
alıcı fazdaki maddeler doğrudan HPLC, GC, CE gibi
analitik cihazlarla tayin edilir. Alıcı faz organik
çözücünün kendisi ile doldurulduğunda ikili faz sistem,
asidik veya bazik sulu çözelti ile doldurulduğunda üçlü
faz sistem olarak isimlendirilir. Alıcı faz hacmi 2–30 µL
arasında değişirken, verici faz hacmi 50 µL ile 1 L
arasında değişir [2,22,29].
Şekil 3. “U” Şeklinde HF–LPME Sistemi
2.1. İkili Faz HF-LPME
İkili faz sistemde gözenekli hollow fiberin hem
gözenekleri hem de içerisi organik çözücü (alıcı faz) ile
doldurulur. Böylelikle, maddeler fiberin hem
gözeneklerinde hem de içerisinde bulunan organik
çözücüye ekstrakte edilir [2,29]. Maddeler verici fazdan
alıcı faza transfer olur. Fazlar arasında dağılıma uğrayan,
örneğin bir “A” maddesi aşağıdaki dengeyi oluşturur
[13,22].
Averici(örnek) Aalıcı (1)
A’nın dengede alıcı faz ve verici faz arasındaki dağılma
katsayısı, Kd(a/v);
Kd(a/v) = (Cd)a / (Cd)v şeklindedir. (2)
(Cd)a : A’nın dengede alıcı fazdaki (organik faz)
derişimi
(Cd)v : A’nın dengede verici fazdaki derişimidir.
İkili faz sistemde geri alınabilirlik (R) aşağıdaki şekilde
hesaplanabilir [30].
Kd(a/v) x Vorg
% R = x100 (3)
Kd(a/v) x Vorg + Vv
“U” Şeklinde
Polipropilen
Hollow Fiber
Gözenekli Polipropilen
Oyuk (Hollow) Fiber
Alıcı (Acceptor)
Faz
Magnetik
Karıştırıcı
Mikro Enjektör
Vial
Magnetik Balık
Verici (Donor)
Faz
E. Alver, A. Demirci, M. Özcimder Oyuk (Hollow) Fiber Sıvı Faz Mikroekstraksiyon
20 SAU J. Sci. Vol 17, No 1, p. 17-26, 2013
Vorg, fiberin içerisinde ve gözeneklerindeki toplam alıcı
faz hacmi, Vv ise verici faz hacmini göstermektedir.
Eşitlik 3’den de görüldüğü gibi geri alınabilirlik dağılma
katsayısı (K), verici faz hacmi ve alıcı faz hacmine
bağlıdır. Yüksek dağılma katsayısı ile yüksek geri
alınabilirlik elde edilebilir.
İkili faz sistemin ekstraksiyon kinetiği aşağıdaki gibi
tanımlanabilir [14].
Calıcı = Cd,alıcı(1 – e-kt) (4)
k (s-1) sabit bir oran olarak tanımlanır.
Ai
k = βo (Kalıcı/verici x Vorg/Vverici + 1) (5)
Vorganik
Calıcı : t zamanda A’nın alıcı fazdaki konsantrasyonu;
Cd,alıcı : Dengedeki konsantrasyon
Ai : Arayüzey alanı
βo : Organik fazla ilgili kütle transfer katsayısı
Burada hızlı bir ekstraksiyon için Ai, βo, maksimum
Vverici ise minimum olmalıdır. Ayrıca hızlı bir karıştırma
işlemi ile kütle transfer katsayısı maksimum yapılmalıdır
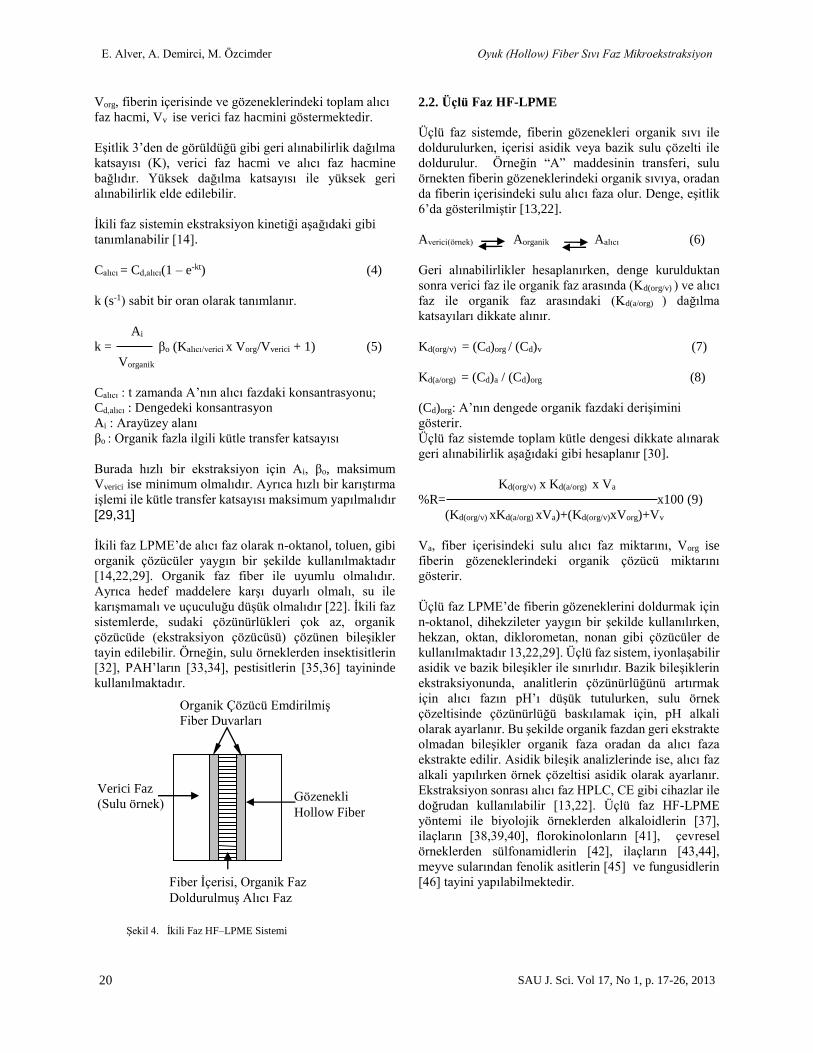
[29,31] İkili faz LPME’de alıcı faz olarak n-oktanol, toluen, gibi
organik çözücüler yaygın bir şekilde kullanılmaktadır
[14,22,29]. Organik faz fiber ile uyumlu olmalıdır.
Ayrıca hedef maddelere karşı duyarlı olmalı, su ile
karışmamalı ve uçuculuğu düşük olmalıdır [22]. İkili faz
sistemlerde, sudaki çözünürlükleri çok az, organik
çözücüde (ekstraksiyon çözücüsü) çözünen bileşikler
tayin edilebilir. Örneğin, sulu örneklerden insektisitlerin
[32], PAH’ların [33,34], pestisitlerin [35,36] tayininde
kullanılmaktadır.
Şekil 4. İkili Faz HF–LPME Sistemi
2.2. Üçlü Faz HF-LPME
Üçlü faz sistemde, fiberin gözenekleri organik sıvı ile
doldurulurken, içerisi asidik veya bazik sulu çözelti ile
doldurulur. Örneğin “A” maddesinin transferi, sulu
örnekten fiberin gözeneklerindeki organik sıvıya, oradan
da fiberin içerisindeki sulu alıcı faza olur. Denge, eşitlik
6’da gösterilmiştir [13,22].
Averici(örnek) Aorganik Aalıcı (6)
Geri alınabilirlikler hesaplanırken, denge kurulduktan
sonra verici faz ile organik faz arasında (Kd(org/v) ) ve alıcı
faz ile organik faz arasındaki (Kd(a/org) ) dağılma
katsayıları dikkate alınır.
Kd(org/v) = (Cd)org / (Cd)v (7)
Kd(a/org) = (Cd)a / (Cd)org (8)
(Cd)org: A’nın dengede organik fazdaki derişimini
gösterir.
Üçlü faz sistemde toplam kütle dengesi dikkate alınarak
geri alınabilirlik aşağıdaki gibi hesaplanır [30].
Kd(org/v) x Kd(a/org) x Va
%R= x100 (9)
(Kd(org/v) xKd(a/org) xVa)+(Kd(org/v)xVorg)+Vv
Va, fiber içerisindeki sulu alıcı faz miktarını, Vorg ise
fiberin gözeneklerindeki organik çözücü miktarını
gösterir.
Üçlü faz LPME’de fiberin gözeneklerini doldurmak için
n-oktanol, dihekzileter yaygın bir şekilde kullanılırken,
hekzan, oktan, diklorometan, nonan gibi çözücüler de
kullanılmaktadır 13,22,29]. Üçlü faz sistem, iyonlaşabilir
asidik ve bazik bileşikler ile sınırlıdır. Bazik bileşiklerin
ekstraksiyonunda, analitlerin çözünürlüğünü artırmak
için alıcı fazın pH’ı düşük tutulurken, sulu örnek
çözeltisinde çözünürlüğü baskılamak için, pH alkali
olarak ayarlanır. Bu şekilde organik fazdan geri ekstrakte
olmadan bileşikler organik faza oradan da alıcı faza
ekstrakte edilir. Asidik bileşik analizlerinde ise, alıcı faz
alkali yapılırken örnek çözeltisi asidik olarak ayarlanır.
Ekstraksiyon sonrası alıcı faz HPLC, CE gibi cihazlar ile
doğrudan kullanılabilir [13,22]. Üçlü faz HF-LPME
yöntemi ile biyolojik örneklerden alkaloidlerin [37],
ilaçların [38,39,40], florokinolonların [41], çevresel
örneklerden sülfonamidlerin [42], ilaçların [43,44],
meyve sularından fenolik asitlerin [45] ve fungusidlerin
[46] tayini yapılabilmektedir.
Gözenekli
Hollow Fiber
Organik Çözücü Emdirilmiş
Fiber Duvarları
Fiber İçerisi, Organik Faz
Doldurulmuş Alıcı Faz
Verici Faz
(Sulu örnek)

Oyuk (Hollow) Fiber Sıvı Faz Mikroekstraksiyon E. Alver, A. Demirci, M. Özcimder
SAU J. Sci. Vol 17, No 1, p. 17-26, 2013 21
Şekil 5. Üçlü Faz HF–LPME Sistemi
Hidrofobik analitler, organik çözücülerde çok iyi
çözünürler. Hidrofobik iyonlaşabilen analitler ise sulu
çözeltilerde farklı pH’ larda yüksek çözünürlüğe sahip
olurlar. Ancak metal iyonları gibi hidrofilik bileşiklerin
organik çözücülerde çözünürlüğü çok azdır ve sulu
çözeltinin farklı pH’larında da çözünürlük değişimleri
çok düşüktür. Bu bileşiklerin analizinde örnek çözeltisine
taşıyıcı eklenerek aktif taşıyıcı metot kullanılır. Taşıyıcı
kısmen hidrofobik, su ile karışabilen ve hedef madde ile
iyon çifti oluşturabilen bir reaktiftir. Maddeler taşıyıcı ile
iyon çifti veya kompleks oluşturarak hidrofobik hale
gelirler ve fiberin gözeneklerindeki organik faza
ekstrakte edilirler. [22,23]. Yöntem, çevresel ve biyolojik
örneklerdeki metalik bileşiklerin tayininde
kullanılmaktadır [47-49].
2.3. Statik ve Dinamik HF-LPME
HF–LPME statik ve dinamik metot olmak üzere iki
şekilde de uygulanabilir [35,50]. Statik metotta örnek
karıştırılarak maddelerin mikro enjektörün ucunda takılı
fiber içerisindeki alıcı faza difüzyonu sağlanır. Statik
metotta karıştırma hızı ve zaman ekstraksiyon veriminde
önemli etkiye sahiptir. Dinamik metotta ise mikro
şırınganın pistonu da maddelerin ekstraksiyonunda
etkilidir. Ekstraksiyon boyunca mikro enjektörün pistonu
hareket ettirilerek fiber içerisindeki alıcı faz enjektöre
geri çekilip tekrar fibere aktarılır. Böylece fiber içersine
giren verici fazdaki maddeler hızlı bir şekilde fiberin
yüzeyinde tabaka oluşturan alıcı faza ekstrakte olur.
Dinamik HF-LPME ikili faz ve üçlü faz sistemin her
ikisine de uygulanabilmektedir [13,33,35,51-54]. Statik
yöntem ile karşılaştırıldığında dinamik yöntem, daha iyi
ekstraksiyon etkinliği ve yinelenebilirlik sağlar
[13,29,51].
HF-LPME yönteminde fiber ekstraksiyon için doğrudan
örnek çözeltisine daldırılabildiği gibi örnek çözeltisi
üzerinde asılı tutularak uçucu bileşiklerin analizi
yapılabilir. Bu uygulama tepede asılı hollow fiber sıvı faz
mikroekstraksiyon (HS-HF-LPME) olarak isimlendirilir
[34,55,56].
HF–LPME yöntemi ile genellikle sulu örneklerden
maddelerin ekstraksiyonu yapılmaktadır. Ancak bazı
matriks ortamlarda, verici faz ortamının sadece su olması
yeterli olmamaktadır. Örneğin S. King vd. (2002)
toprakta PAH’ların analizinde [57], N. Ratola vd. (2008)
ise çam iğnelerinde PAH’ların analizinde [58] verici faz
olarak, aseton/su karışımını kullanmışlardır.
Verici Faz
(Sulu örnek)
Organik Çözücü Emdirilmiş
Fiber Duvarları
Fiber İçerisi, Sulu Çözeltili
Doldurulmuş Alıcı Faz
Gözenekli
Hollow Fiber

E. Alver, A. Demirci, M. Özcimder Oyuk (Hollow) Fiber Sıvı Faz Mikroekstraksiyon
22 SAU J. Sci. Vol 17, No 1, p. 17-26, 2013
Çizelge1. HF-LPME İle Yapılan Çalışmalar
Madde Matriks Ortam HF-LPME Sistemi Analitik Cihaz Kaynaklar
Pestisit Su İkili Faz GC-MS1 [35]
Pestisit Deniz suyu İkili Faz GC-MS [36]
Pestisit Sebze Üçlü Faz LC-MS2 [68]
İnsektisit Su İkili Sistem GC-FTD3 [32]
PAH Su İkili Faz GC-MS [33]
PAH Su Tepe Boşluklu GC-MS [34]
PAH Su, Toprak Üçlü Faz GC-FID4 [51]
PAH Toprak İkili Faz GC-FID [57]
PAH Çam İğnesi İkili Faz GC-MS [58]
PAH Atık Su İkili faz GC-MS [66]
Fenoksi Herbisit İnek Sütü Üçlü Faz HPLC-UV5 [61]
Triazin Herbisit Toprak İkili faz GC-MS [67]
Fungusit Portakal Suyu Üçlü Faz LC-MS [46]
Fenolik Asit Meyve Suyu Üçlü Faz HPLC-DAD6 [45]
Nitrofenol Deniz Suyu Üçlü Faz LC-UV [60]
Fenol Su Üçlü Faz CE(MEKC)7 [59]
Fenol Deniz suyu İkili faz GC-MS [65]
Aromatik amin Su Üçlü Faz CE [53]
Aromatik amin Su Üçlü Faz HPLC [64]
Florokinolon Su, Hayvan İdrarı Üçlü Faz HPLC-DAD/FD8 [41]
Sülfonamit Su Üçlü Faz HPLC-DAD/FD [42]
İlaç İdrar, Plazma Üçlü Faz HPLC-UV [38]
İlaç İdrar, Plazma Üçlü Faz ESI-IMS9 [39]
İlaç Kan Üçlü Faz LC-MS [40]
İlaç Arıtma Çamuru Üçlü Faz LC-MS [43]
İlaç Atık Su Üçlü Faz LC-MS-MS [44]
İlaç Su, Plazma Üçlü Faz CE [62]
İlaç İdrar, Plazma Üçlü Faz CE [63]
İlaç İdrar,Su Üçlü Faz CE-DAD/UV10 [70]
Pb, Ni Su İkili Faz ETAAS11 [47]
Cu, Zn, Pd, Cd,
Hg, Pb, Bi
Nehir Suyu, Göl Suyu,
Serum
İkili Faz ETV-ICP-MS12
[48]
As(III), As(V) İçme Suyu, Saç İkili Faz ETAAS [49]
Uçuçu Selenyum
Bileşikleri
Süt, yoğurt, meyve suyu,
Su, toprak Tepe Boşluklu GC-MS [55]
Metil-Hg Saç, Çamur İkili Faz GFAAS13 [69]
1) GC-MS: Gaz Kromatograf- Kütle Spektrometresi
2) LC-MS: Sıvı Kromatograf- Kütle Spektrometresi
3) GC-FTD: Gaz Kromatograf-Termiyonik Detektör (Nitrojen-Fosfor Detektör, NPD)
4) GC-FID: Gaz Kromatograf-Alev İyonlaşma Detektörü
5) HPLC-UV: Yüksek Basınç Sıvı Kromatograf-UV Detektör
6) HPLC-DAD: Yüksek Basınç Sıvı Kromatograf-Diode Array Detektör
7) MEKC: Misel Elektrokinetik Kromatografi
8) HPLC-DAD/FD: Yüksek Basınç Sıvı Kromatograf-Diode Array/Floresan Detektör
9) ESI-IMS: Elektrosprey İyonizasyon-İyon Mobilite Spektrometresi
10) CE-DAD/Kapiler Elektroforez- Diode Array/UV Detektör
11) ETAAS: Elektrotermal Atomik Absorpsion Spektrometresi
12) ETV-ICP/MS: Elektrotermal Buharlaşma-İndüktif Optik Plazma Kütle Spektrometresi
13) GFAAS: Grafit Fırınlı Atomik Absorpsion Spektrometresi

Oyuk (Hollow) Fiber Sıvı Faz Mikroekstraksiyon E. Alver, A. Demirci, M. Özcimder
SAU J. Sci. Vol 17, No 1, p. 17-26, 2013 23
3. SONUÇ
HF–LPME basit, hızlı, ucuz ve yüksek oranda seçici ve
yüksek zenginleştirme faktörüne sahip bir yöntemdir.
Oyuk fiber mikroekstraksiyon yöntemi çevresel,
biyolojik, gıda örneklerinde ve asidik ve bazik ilaç
analizlerinde zenginleştirmenin yanı sıra ön temizleme
işlemini de aynı anda yaparak kullanılabilir. Fiber, alıcı
fazın örnek çözelti ile doğrudan temasnı kestiğinden
dolayı, şiddetli karıştırma hızlarında ekstraksiyon
çözücüsü kaybını en az düzeylere indirir. Polipropilen
fiber çok ucuz bir maliyete sahiptir. Bu nedenle, her
analizde bir kez kullanılır. Fiberin her analizde bir kez
kullanılması, önceki analizlerden kirlilik gelmesini
engeller. Polipropilen hollow fiber küçük gözeneklere
sahip olduğu için, matriks ortamdaki büyük molekül
ağırlıklı kirliliklerin alıcı faza girmesini engelleyerek iyi
bir ön temizleme işlemi yapar [2,13,22,29,67,71].
Yöntem, alıcı faz ile verici faz arasındaki membran
bariyerin ekstraksiyon etkinliğini azaltması ve
ekstraksiyon süresini uzatması, fiberin yüzeyinde hava
kabarcıklarının oluşması ile ekstraksiyon etkinliği ve
yinelenebilirliğin azaltması, gerçek örnek analizlerinde
matriksin (kan, plazma, atık su) fiber üzerindeki
gözenekleri tıkayabilmesi gibi dezavantajlara sahiptir
[22,72,73].
KAYNAKLAR
[1] Krylov, V.A., Krylov, A.V, Mosyagin, P.V.,
Matkivskaya, Y.O., “Liquid–Phase
Microextraction Preconcentration of Impurities”,
Journal of Analytical Chemistry, 66, 331–350,
(2011).
[2] Psillakis, E., Kalogerakis, N., “Developments in
liquid-phase microextraction”, Trends Anal.
Chem., 22, 565–574, (2003).
[3] Pena-Pereira, F., Lavilla, I., Bendicho, C.,
“Miniaturized preconcentration methods based on
liquid-liquid extraction and their application in
inorganic ultratrace analysis and speciation”, A
review. Spectrochim. Acta, Part B 64, 1–15, (2009).
[4] Mahugo-Santana, C., Sosa-Ferrera, Z., , Torres-
Padrón, M.E., Santana-Rodríguez, J.J.,
“Application of new approaches to liquid-phase
microextraction for the determination of emerging
pollutants”, Trends Anal. Chem, 30, 731–748,
2011.
[5] C.F. Poole, “New trends in solid-phase extraction”,
Trends Anal. Chem. 22, 362–373, (2003).
[6] Arthur, C.L., Pawliszyn, J., “Solid phase
microextraction with thermal desorption using
fused silica optical fibers”, Anal. Chem., 62, 2145–
2148, (1990).
[7] Malik, A. K., Kaur, V., Verma, N., “A review on solid
phase microextraction—High performance liquid
chromatography as a novel tool for the analysis of
toxic metal ions”, Talanta, 68, 842–849, (2006).
[8] Olariu, R-I., Vione, D., Grinberg, N., Arsene, C.,
“Sample preparation for trace analysis by
chromatographic methods”, J. Liquid
Chromatography & Related Technologies, 33,
1174–1207, (2010).
[9] Dietz, C., Sanz, J., C´amara C., “Recent
developments in solid-phase microextraction
coatings and related techniques”, J. Chromatogr.
A, 1103, 183–192, (2006).
[10] Kumar, A., Gaurav, Malik, A.K., Tewary, D.K.,
Singh, . B., “A review on development of solid
phase microextraction fibers by sol-gel methods
and their applications” Anal. Chim. Acta, 610, 1–14
(2008).
[11] Psillakis, E., Kalogerakis, N., “Solid-phase
microextraction versus single-drop microextraction
for the analysis of nitroaromatic explosives in water
samples”, J. Chromatogr. A, 938, 113–120, (2001).
[12] H. Liu, P.K. Dasgupta, “Analytical Chemistry in a
Drop. Solvent Extraction in a Microdrop”, Anal.
Chem., 68, 1817-1826, (1996).
[13] Rasmussen, K.E., Pedersen-Bjergaard, S.,
“Developments in hollow fibre based, liquid-phase
microextraction”, Trends Anal. Chem., 23, 1–10,
(2004).
[14] Jeannot, M.A., Cantwell, F.F., “Solvent
microextraction into a single drop”, Anal. Chem.,
68, 2236-2240, (1996).
[15] He, Y., Lee, H.K., “Liquid phase microextraction in
a single drop of organic solvent by using a
conventional microsyringe”, Anal. Chem., 69,
4634–4640, (1997),
[16] L. Zhao, H.K. Lee, “Application of static liquid-
phase microextraction to the analysis of
organochlorine pesticides in water”, J.
Chromatogr. A, 919, 381–388, (2001).
[17] Pedersen-Bjergaard, S., Rasmussen, K.E., “Liquid-
phase microextraction with porous hollow fibers, a
miniaturized and highly flexible format for liquid-
liquid extraction”, J. Chromatogr. A, 1184, 132–
142, (2008).
[18] Jeannot, M.A., Cantwell, F.F., “Mass transfer
characteristics of solvent extraction into a single
drop at the tip of a syringe needle”, Anal. Chem.,
69, 235–239, (1997).
[19] Theis, A.L., Waldack, A.J., Hansen, S.M., Jeannot,
M.A., “Headspace solvent microextraction”, Anal.
Chem. 73, 5651–5654, (2001).
[20] Ma, M.H., Cantwell, F.F., “Solvent microextraction
with simultaneous back-extraction for sample
cleanup and preconcentration: Preconcentration
into a single microdrop”, Anal. Chem., 71, 388–
393, (1999).

E. Alver, A. Demirci, M. Özcimder Oyuk (Hollow) Fiber Sıvı Faz Mikroekstraksiyon
24 SAU J. Sci. Vol 17, No 1, p. 17-26, 2013
[21] Liu, W.P., Lee, H.K., “Continuous-flow
microextraction exceeding 1000-fold concentration
of dilute analytes”, Anal. Chem., 72, 4462–4467,
(2000).
[22] Sarafraz-Yazdi, A., Amiri, A., “Liquid-phase
microextraction”, Trends Anal. Chem., 29, 1–14,
(2010).
[23] Dadfarnia, S., Shabani, A.M.H., “Recent
development in liquid phase microextraction for
determination of trace level concentration of
metals—A review”, Anal. Chim. Acta, 658, 107–
119, (2010).
[24] K.E. Kramer, A.R.J. Andrews, “Screening method
for 11-nor-Δ9-tetrahydrocannabinol-9-carboxylic
acid in urine using hollow fiber membrane solvent
microextraction with in-tube derivatization”, J.
Chromatogr. B, 760, 27-36, (2001).
[25] Pedersen-Bjergaard, S., Rasmussen, K.E., “Liquid-
liquid-liquid microextraction for sample
preparation of biological fluids prior to capillary
electrophoresis”, Anal. Chem. 71, 2650–2656,
(1999).
[26] De Jager, L.S., Andrews, A.R.J., “Preliminary
studies of a fast screening method for cocaine and
cocaine metabolites in urine using hollow fibre
membrane solvent microextraction (HFMSME)”,
Analyst, 126, 1298–1303, (2001).
[27] Cuia, S., Tanb, S., Ouyang, G., Pawliszyn, J.,
“Automated polyvinylidene difluoride hollow fiber
liquid-phase microextraction of flunitrazepam in
plasma and urine samples for gas
chromatography/tandem mass spectrometry”, J.
Chromatogr. A, 1216, 2241–2247, (2009).
[28] Li,Y., Xiong, Y., Fang, J., Wang, L., Liang, Q.,
“Application of hollow fiber liquid-phase
microextraction in identification of oil spill
sources”, J. Chromatogr. A, 1216, 6155–6161,
(2009).
[29] Pedersen-Bjergaard, S., Rasmussen, K.E., “Liquid-
phase microextraction with porous hollow fibers, a
miniaturized and highly flexible format for liquid–
liquid extraction”, J. Chromatogr. A, 1184, 132–
142, (2008).
[30] Ho, T.S., Pedersen-Bjergaard, S., Rasmussen, K.E.,
“Recovery, enrichment and selectivity in liquid-
phase microextraction - Comparison with
conventional liquid-liquid extraction”, J.
Chromatogr. A, 963, 3-17, (2002).
[31] Pena-Pereira, F., Lavilla, I., Bendicho, C., “Liquid-
phase microextraction approaches combined with
atomic detection”, Anal. Chim. Acta, 669, 1–16,
(2010).
[32] Lambropoulou, D.A., Albanis, T.A., “Application
of hollow fiber liquid phase microextraction for the
determination of insecticides in water”, J.
Chromatogr. A, 1072, 55–61, (2005).
[33] Zhao, L., Lee, H.K., “Liquid-Phase Microextraction
Combined with Hollow Fiber as a Sample
Preparation Technique Prior to Gas
Chromatography/Mass Spectrometry”, Anal.
Chem., 74, 2486-2492, (2002).
[34] Jiang, X., Basheer, C., Zhang, J., Lee, H.K.,
“Dynamic hollow fiber-supported headspace
liquid-phase microextraction”, J. Chromatogr. A,
1087, 289–294, (2005).
[35] Hou, L., Shen, G., Lee, H.K., “Automated hollow
fiber-protected dynamic liquid-phase
microextraction of pesticides for gas
chromatography - Mass spectrometric analysis”, J.
Chromatogr. A, 985, 107–116, (2003).
[36] Basheer, C., Lee, H.K., Obbard, J.P.,
“Determination of organochlorine pesticides in
seawater using liquid-phase hollow fibre membrane
microextraction and gas chromatography–mass
spectrometry”, J. Chromatogr. A, 968, 191-199,
(2002).
[37] Yanga, Y., Chena, J., , Shia, Y.P., “Determination
of aconitine, hypaconitine and mesaconitine in
urine using hollow fiber liquid-phase
microextraction combined with high-performance
liquid chromatography”, J. Chromatogr. B, 878,
2811–2816, (2010).
[38] Ebrahimzadeh, H., Yamini, Y., Firozjaei, H.A.,
Kamarei, F., Tavassoli,N., Rouini, M.R., “Hollow
fiber-based liquid phase microextraction combined
with high-performance liquid chromatography for
the analysis of gabapentin in biological samples”,
Anal. Chim. Acta 665, 221–226, (2010).
[39] Saraji, M., Jafari, M.T., Sherafatmand, H., “Hollow
fiber-based liquid–liquid–liquid microextraction
combined with electrospray ionization-ion mobility
spectrometry for the determination of pentazocine
in biological samples”, J. Chromatogr. A, 1217,
5173–5178, (2010).
[40] Ugland, H.G., Krogh, M., Reubsaet, L., “Three-
phase liquid-phase microextraction of weakly basic
drugs from whole blood”, J. Chromatogr. B, 798,
127–135, (2003).
[41] Payẚn, M.R., Lὀpez, M.A.B.,Fernẚndez-Torres, R.,
Gonzẚlez, J.A.O., Mochὀn, M.C., “Hollow fiber-
based liquid phase microextraction (HF-LPME) as
a new approach for the HPLC determination of
fluoroquinolones in biological and environmental
matrices”, J. Pharmaceutical and Biomedical
Analysis, 55, 332–341, (2011).
[42] Payẚn, M.R., Lὀpez, M.A.B.,Fernẚndez-Torres, R.,
Navarro, M.V., Mochὀn, M.C., “Hollow fiber-
based liquid phase microextraction (HF-LPME) for
a highly sensitive HPLC determination of
sulfonamides and their main metabolites”, J.
Chromatogr. B, 879, 197–204, (2011).
[43] Saleh, A., Larsson, E., Yamini, Y., Jonsson, J.A.,

Oyuk (Hollow) Fiber Sıvı Faz Mikroekstraksiyon E. Alver, A. Demirci, M. Özcimder
SAU J. Sci. Vol 17, No 1, p. 17-26, 2013 25
“Hollow fiber liquid phase microextraction as a
preconcentration and clean-up step after
pressurized hot water extraction for the
determination of non-steroidal anti-inflammatory
drugs in sewage sludge”, J. Chromatogr. A, 1218,
1331–1339, (2011).
[44] Payẚn, M.R., Lὀpez, M.A.B.,Fernẚndez-Torres, R.,
Mochὀn, M.C., Ariza, J.L.G., “Application of
hollow fiber-based liquid-phase microextraction
(HF-LPME) for the determination of acidic
pharmaceuticals in wastewaters”, Talanta, 82,
854–858, (2010).
[45] Saraji, M., Mousavi, F., “Use of hollow fibre-based
liquid–liquid–liquid microextraction and high-
performance liquid chromatography–diode array
detection for the determination of phenolic acids in
fruit juices”, Food Chemistry 123, 1310–1317,
(2010).
[46] Barahona, F., Gjelstad, A., Pedersen-Bjergaard, S.,
Rasmussen, K.E., “Hollow fiber-liquid-phase
microextraction of fungicides from orange juices”,
J. Chromatogr. A, 1217, 1989–1994, (2010).
[47] Abulhassani, J., Manzoori, J.L., Amjadi, M.,
“Hollow fiber based-liquid phase microextraction
using ionic liquid solvent for preconcentration of
lead and nickel from environmental and biological
samples prior to determination by electrothermal
atomic absorption spectrometry”, J.Hazardous
Materials, 176, 481–486, (2010).
[48] Xia, L., Wu, Y., Hu, B., “Hollow-fiber liquid-phase
microextraction prior to low-temperature
electrothermal vaporization ICP-MS for trace
element analysis in environmental and biological
samples”, J. Mass Spectrom., 42, 803–810, (2007).
[49] Jiang, H., Hu, B., Chen, B., Xia, L., “Hollow fiber
liquid phase microextraction combined with
electrothermal atomic absorption spectrometry for
the speciation of arsenic (III) and arsenic (V) in
fresh waters and human hair extracts”, Anal. Chim.
Acta, 634, 15-21, (2009).
[49] Li, G., Zhang, L., Zhang, Z., “Determination of
polychlorinated biphenyls in water using dynamic
hollow fiber liquid-phase microextraction and gas
chromatography–mass spectrometry” J.
Chromatogr. A 1204, 119–122, (2008).
[50] Esrafili, A., Yamini, Y., Ghambarian, M., Moradi ,
M., “Dynamic three-phase hollow fiber
microextraction based on two immiscible organic
solvents with automated movement of the acceptor
phase”, J. Sep. Sci., 34, 98–106, (2011).
[51] Hou, L., Wen, X., Tu, C., Lee, H.K., “Combination
of liquid-phase microextraction and on-column
stacking for trace analysis of amino alcohols by
capillary electrophoresis”, J. Chromatogr. A, 979,
163-169, (2002).
[52] Hou, L., Lee, H.K., “Dynamic Three-Phase
Microextraction as a Sample Preparation Technique
Prior to Capillary Electrophoresis”, Anal. Chem.,
75, 2784–2789, (2003).
[53] Hansson, H., Nilsson, U., “Assessment of a
dynamic hollow-fibre liquid phase microextraction
system for human blood plasma samples”, Talanta,
77, 1309–1314, (2009).
[54] Ghasemi, E., Sillanpää, M., Najafi, N.M.,
“Headspace hollow fiber protected liquid-phase
microextraction combined with gas
chromatography–mass spectroscopy for speciation
and determination of volatile organic compounds of
selenium in environmental and biological samples”,
J. Chromatogr. A, 1218, 380–386, (2011).
[55] Huang, S.P., Huang, S.D., “Determination of
organochlorine pesticides in water using solvent
cooling assisted dynamic hollow-fiber-supported
headspace liquid-phase microextraction”, J.
Chromatogr. A, 1176, 19–25, (2007).
[56] King, S., Meyer, S.J., Andrews. A.R.J., “Screening
method for polycyclic aromatic hydrocarbons in
soil using hollow fiber membrane solvent
microextraction”, J. Chromatogr. A, 982, 201–208,
(2002).
[57] Ratola, N., Alvesa, A., Kalogerakisb, N., Psillakis,
E., “Hollow-fibre liquid-phase microextraction: A
simple and fast cleanup step used for PAHs
determination in pine needles”, Anal. Chim. Acta,
618, 70–78, (2008).
[58] Zhu, L., Tu, C., Lee, H.K. “Liquid-Phase
Microextraction of Phenolic Compounds Combined
with On-Line Preconcentration by Field-Amplified
Sample Injection at Low pH in Micellar
Electrokinetic Chromatography”, Anal. Chem., 73,
5655–5660, (2001).
[59] Zhu, L., Zhu, L., Lee, H.K., “Liquid–liquid–liquid
microextraction of nitrophenols with a hollow fiber
membrane prior to capillary liquid
chromatography”, J. Chromatogr. A, 924, 407–417,
(2001).
[60] Zhu, L., Ee, K.H., Zhao, L., L ee, H.K., “Analysis of
phenoxy herbicides in bovine milk by means of
liquid–liquid–liquid microextraction with a hollow-
fiber membrane”, J. Chromatogr. A, 963, 335–343,
(2002).
[61] Pedersen-Bjergaard, S., Rasmussen, K.E., Brekke,
A., Ho, T.S., Halvorsen, T.G., “Liquid-phase
microextraction of basic drugs – Selection of
extraction mode based on computer calculated
solubility data”, J. Sep. Sci., 28, 1195-1203, (2005).
[62] Ho, T.S., Halvorsen, T.G., Pedersen-Bjergaard, S.,
Rasmussen, K.E., “Liquid-phase microextraction of
hydrophilic drugs by carrier-mediated transport”, J.
Chromatogr. A, 998, 61–72, (2003).
[63] Yazdi, A.S., Es’haghi, Z., “Two-step hollow fiber-
based, liquid-phase microextraction combined with
E. Alver, A. Demirci, M. Özcimder Oyuk (Hollow) Fiber Sıvı Faz Mikroekstraksiyon
26 SAU J. Sci. Vol 17, No 1, p. 17-26, 2013
high-performance liquid chromatography: A new
approach to determination of aromatic amines in
water”, J. Chromatogr. A, 1082, 136–142, (2005).
[64] Basheer, C., Lee, H.K., “Analysis of endocrine
disrupting alkylphenols, chlorophenols and
bisphenol-A using hollow fiber-protected liquid-
phase microextraction coupled with injection port-
derivatization gas chromatography–mass
spectrometry”, J. Chromatogr. A, 1057, 163–169,
(2004).
[65] Charalabaki, M., Psillakis, E., Mantzavinos, D.,
Kalogerakis, N., “Analysis of polycyclic aromatic
hydrocarbons in wastewater treatment plant
effluents using hollow fibre liquid-phase
microextraction”, Chemosphere, 60, 690–698,
(2005).
[66] Shen, G., Lee, H.K., “Hollow fiber-protected liquid-
phase microextraction of triazine herbicides”, Anal.
Chem., 74, 648–654, (2002).
[67] Romero-Gonzẚlez, R., Pastor-Montoro, E.,
Martinez-Vidal, J.L., Garrido-Frenich, A.,
“Application of hollow fiber supported liquid
membrane extraction to the simultaneous
determination of pesticide residues in vegetables by
liquid chromatography/mass spectrometry”, Rapid
Commun. Mass Spectrom., 20, 2701-2708, (2006).
[68] Jiang, H., Hu, B., Chen, B., Zu, W., “Hollow fiber
liquid phase microextraction combined with
graphite furnace atomic absorption spectrometry
for the determination of methylmercury in human
hair and sludge samples”, Spectrochimica Acta
Part B, 63, 770–776, (2008).
[69] Pedersen-Bjergaard, S., Rasmussen, K.E., “Liquid-
phase microextraction and capillary electrophoresis
of acidic drugs”, Electrophoresis, 21, 579–585,
(2000).
[70] Psillakis, E., Kalogerakis, N., “Hollow-fibre liquid-
phase microextraction of phthalate esters from
water”, J. Chromatogr. A, 999, 145–153, (2003).
[71] Zanjani, M.R.K., Yamini, Y., Shariati, S., Jönsson,
J.A., “A new liquid-phase microextraction method
based on solidification of floating organic drop”,
Anal. Chim. Acta, 585, 286–293, (2007).
[72] Alver, E., Demirci, A., Özcimder.,
Mikroestraksiyon Yöntemleri, Sigma, 30, 75-90,
(2012)

SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 27-32, 2013 SAU J. Sci. Vol 17, No 1, p. 27-32, 2013
27
Investigating the effect of sympathetic skin response parameters on the
psychological test scores in patients with fibromyalgia syndrome by using anns
Murat YILDIZ1*, Özhan ÖZKAN1, Etem KÖKLÜKAYA1
1Sakarya Üniversitesi, Mühendislik Fakültesi, Elektrik Elektronik Mühendisliği, Sakarya
09.09.2012 Geliş/Received, 04.02.2013 Kabul/Accepted
ÖZET
Bu çalışmada, Süleyman Demirel Üniversitesi, Tıp Fakültesi, Fiziksel Tıp ve Rehabilitasyon Bölümü’nde seçilen hasta
ve sağlıklı deneklere Görsel Analog Ağrı Skalası, Verbal Ağrı Skalası, Beck Depresyon Envanteri, Beck Anksiyete
Envanteri, Hamilton Depresyon Değerlendirme Skalası ve Hamilton Anksiyete Değerlendirme Skalası gibi psikolojik
testler uygulandı ve skorları kaydedildi. Sempatik deri cevabı (SSR) ölçümlerinin yapılabilmesi için aynı bölüme bir
ölçüm sistemi kuruldu. SSR ölçümleri yapıldı ve kaydedildi. Kaydedilen SSR verilerinden gecikme süresi, maksimum
genlik ve iki uyartım arası geçen süre gibi parametreler, Matlab yazılımı kullanılarak hesaplandı. Analizde SSR
parametre değerleri psikolojik test skorlarına eklendi ve yapay sinir ağları kullanılarak fibromiyalji sendromu
(FMS)’na ilişkin teşhis doğruluk yüzdeleri hesaplandı. Elde edilen benzetim sonuçları SSR’nin seçilen parametreleri
ile FMS’nin ilişkili olduğunu ve SSR’nin FMS’de bir teşhis metodu olarak kullanılabileceğini göstermiştir.
Anahtar Kelimeler: Sempatik deri cevabı, fibromiyalji sendromu, YSA, fibromiyaljide psikolojik testler
Fibromiyalji hastalarında sempatik deri cevabı parametrelerinin psikolojik
test skorlarına etkisinin ysa kullanılarak incelenmesi
ABSTRACT
In this study, psychological tests such as Visual Analogue Pain Scale, Verbal Pain Scale, Beck Depression Inventory,
Beck Anxiety Inventory, Hamilton Depression Rating Scale and Hamilton Anxiety Scale were applied to the selected
healthy subjects and patients with Fibromyalgia Syndrome (FMS) in Suleyman Demirel University, Faculty of
Medicine, Department of Physical Medicine and Rehabilitation and the scores were recorded. A measurement system
was established in the same department of the university to measure the sympathetic skin response (SSR) from the
subjects. The SSR was measured and recorded. The parameters such as latency time, maximum amplitude and the
elapsed time were calculated by using Matlab software from the recorded SSR data. SSR parameters were added to
the scores and diagnosis accuracy percentages of the FMS calculated by using artificial neural networks. Obtained
results from the simulations showed that the specified parameters of the SSR and FMS were concerned and these
parameters can be used as a diagnostic method in FMS.
Keywords: Sympathetic skin response, fibromyalgia syndrome, ANN, psychological tests in fibromyalgia
* Sorumlu Yazar / Corresponding Author

M. Yıldız, ,Ö. Özkan, E. Köklükaya Investigating The Effect Of Sympathetic Skin Response Parameters
On The Psychological Test Scores In Patients With Fibromyalgia
Syndrome By Using Anns
28 SAU J. Sci. Vol 17, No 1, p. 27-32, 2013
1. INTRODUCTION
Fibromyalgia syndrome (FMS) whose symptoms are
appeared as widespread body pains and fatigue is a
chronic disease of the musculoskeletal system [1]. The
most characteristic feature is widespread muscle pain. In
this disease, beside complaints such as weakness, fatigue,
disinclination and sleep disorders, there are important
disease signs such as muscle function disorders, central
nervous system disorders and the neuroendocrine system
changes, immunological disorders and psychological
factors [2,3]. The disease complaints increase with the
seasonal changes, especially with cold weather. Patients
with these complaints, because of the pain which can not
be determined the origin, resort to various branches
doctors and the various treatments are applied to these
patients. However, because of the accurate diagnosis of
the disease can not be done, specific treatment methods
can not be applied to FMS. The complaints of pain
usually ignored with pain relief medications. This
method reduces the symptoms for certain time, but after
a while the symptoms appear again.
FMS is a widespread disease generally seen in women.
Cause of the disease is not fully known yet, but the
autonomic nervous system is significantly affected by the
disease [4]. Specific diagnosis of disease is only consists
of found pain zones and applied psychological tests to the
patient. However, FMS, associated with components of
several parameters. One of the most important of these
parameters is Sympathetic Skin Response (SSR) [5].
SSR is an electrophysiological method used in evaluation
sympathetic sudomotor fibers function by using the skin
resistance change. SSR is an instantaneous and
nonpersistent change given by the internal and/or
external stimulus in the electrical potential of the skin of
palm and sole [5]. Studies shows that latency time
obtained from SSR data of patients with FMS has been
affected dysfunction in the autonomic nervous system
[5,6]. FMS also significantly affects the autonomic
nervous system, a relationship between the SSR and FMS
is clear. Therefore, the use of SSR is very important in
the classification of FMS. In addition, the subsequent
studies in patients with the first symptoms of the disease
- of boundary values -, even prior to the onset of serious
clinical signs the relationships between autonomic
nervous system dysfunction and SSR can be detected.
2. SYMPATHETIC SKIN RESPONSE
SSR which a part of electrical impedance of the body is
defined by arising spontaneously depending on the
body's internal dynamics or by means of a stimulus is
applied externally to the body as a reflex that can occur
temporary electrical potential difference in the skin [5].
Although the SSR parameters that affect in the human
body is unknown exactly in many studies, investigation
the sympathetic nervous system function of SSR may be
a non-invasive approach have been proposed [6-8].
Measurements of SSR is easy, but they are not be safe
enough for diagnostic applications when valid
procedures are taken into account and autonomic and
sudomotor function disorders in particular are not found
an absolute accuracy relationship between the obtained
clinical findings and the measurements of SSR [7, 8].
Though SSR can be obtained easily and non-invasive,
many problems are available in application because of
variation in parameters such as latency time, maximum
amplitude, the elapsed time. As a result of clinical trials
the wave forms of the many parameters in the SSR
content were found.
In some of the studies, it has been determined that
changes were occurred in the SSR values in diseases that
are affected the autonomic nervous system [8]. As a
result of these investigations, it was concluded that
obtained measurement values could be brought more
clearly by using soft-computing techniques [6,9,10].
3. USED PARAMETERS IN SIMULATIONS
The SSR parameters such as latency time (LT),
maximum amplitude (MAXG), elapsed time (TT) and
psychological tests such as visual analogue pain scale
(VAS), verbal pain scale (VRS), Beck depression scale
(BDI), Beck anxiety scale (BAI), Hamilton depression
rating scale (Ham-D) and Hamilton anxiety scale
(HARS) are used as parameters in FMS classification.
Brief descriptions of these parameters are given below.
Obtained these SSR parameters and psychological test
scores were used in classification as a feature.
3.1. SSR Parameters
Latency time (LT): Latency time is used to mean any
delay from the start of the stimulus artifact to the first
deflexion of SSR as shown in figure 1. Latency time also
has the most significant results in SSR waveform analysis
and interpretation.
Maximum amplitude (MAXG): The maximum
amplitude value obtained from the SSR measurement is
taken as maximum potential changes between two
sequential stimulations.
Elapsed time (TT): It is the time between two sequential
stimulations that applied to measure SSR.

Investigating The Effect Of Sympathetic Skin Response Parameters
On The Psychological Test Scores In Patients With Fibromyalgia
Syndrome By Using Anns
M. Yıldız, ,Ö. Özkan, E. Köklükaya
SAU J. Sci. Vol 17, No 1, p. 27-32, 2013 29
Figure 1: Sample SSR waveform
3.2. Psychological Test Scores
Visual Analogue Pain Scale (VAS) score: Widely used
to assess the severity of pain, “0” value if no pain, “10”
indicating that unbearable pain the value of 10 cm with
the intensity scale is used [11].
Verbal pain scale (VRS) score: Widely used to assess the
severity of pain, 0: no pain, 1: mild pain, 2: moderate
pain, 3: severe pain, 4: unbearable pain. A likert-type
scale is also used [12].
Beck Depression Inventory (BDI) score: It is an
inventory measured the emotional, physical, cognitive
and motivational symptoms in depression. It is assessed
by a Likert-type scale and consists of 21 questions. Sum
of the scores obtained from the answers of questions
gives the Beck depression inventory score. Total score
ranges from 0-63. The complains are evaluated as 0-13
points no depression, 14-24 points mild depressive
symptoms, higher than 25 points intensive depressive
symptoms [13].
Beck Anxiety Inventory (BAI) score: An inventory
measures symptoms in the anxiety. It is evaluated by a
Likert-type scale and consists of 21 questions. Sum of the
scores obtained from the answers of questions gives the
Beck Anxiety Inventory score. Total score ranges from
0-63. The higher the total score shows the higher person's
anxiety level [14].
Hamilton Anxiety Rating Scale (HARS): It is a test
consists of 14 question and interrogated mental and
physical symptoms. A total score is obtained between 0-
56 points with 5 item Likert-type scale [15].
Hamilton Depression Rating Scale (Ham-D) score: One
of the scales is commonly used to determine the severity
of depressive symptoms. In the evaluation of 17
questions version of the test the interviewer assesses the
patient by using the structured interview guide and obtain
a score from 0-53 points. According to the obtained total
score is graded as <13: mild, 13-17: normal, > 17: severe
depression [16].
4. MATERIALS AND METHODS
Database used in this study were recorded in Suleyman
Demirel University, Faculty of Medicine, Department of
Physical Medicine and Rehabilitation. Database was
consisted of psychological test scores and SSR
measurements that were measured from 29 healthy
subjects and 57 patients who were diagnosed with FMS
according to the 1990 ACR criteria [17]. When
measurements are taken, it has been noted that the
subjects are lying on his/her back and in comfortable as
possible. The ambient of taken measurement is far from
the noise and electromagnetic environment. Before the
SSR measurements were obtained, some parameters of
the subjects which are more effective on SSR (height,
weight, age) were chosen between the specific limits
[18]. In the study, the measurements were taken of care
to stay the subjects' age, height and weight within these
limits. The boundaries of subjects and the mean of these
features are given in Table 1.
Table 1: Physical characteristics of subjects for patients and controls
Number Age Weight Height
Patients 57 45.5 72.3 161.1
Controls 29 42.8 69.6 158.3
Specified parameters of SSR were recorded from
subjects by using the measurement system consisted of
AD Instruments ML870/P PowerLab8/30, AD
Instruments PowerLab ML116 GSR Amplifier, AD
Instruments MLT116P GSR finger electrodes and
stimulator within 12m2 indoor area. Grounding of the
system was restructured to eliminate the noise factor.
Records were transferred to the computer via Lab Chart
Pro software.
For stimulation, 20μA of current was passed through the
FMS patients and healthy subjects by electrodes,
temporary potential changes as the response of this
current on the skin were measured and recorded. Data
analysis was performed using MATLAB® to determine
the latency time, maximum amplitude and elapsed time
between two stimulations.
5. ARTIFICIAL NEURAL NETWORKS
A multi-layer feed-forward neural network (MLFFNN)
was used in this study. It consists of three basic layers
such as input layer, hidden layer and output layer. A
layer's input is the output of the previous layer. Input
layer forward the input data to hidden layer without any

M. Yıldız, ,Ö. Özkan, E. Köklükaya Investigating The Effect Of Sympathetic Skin Response Parameters
On The Psychological Test Scores In Patients With Fibromyalgia
Syndrome By Using Anns
30 SAU J. Sci. Vol 17, No 1, p. 27-32, 2013
change. The data is processed only in the hidden layer
and output layer. The mission of input layer is only
multiplexing the input. When the structure of ANN is
created typically one or two hidden layers are sufficient.
This type of ANNs works according to supervised
learning strategy and back propagation learning
algorithm is used efficiently in training of these
networks. Therefore, these networks also referred to as
back propagation networks. Operating procedures of this
type network involve the following steps in generally.
Collecting Samples: Samples are collected for the
training set and test set. During the network training, only
training data are given to ANN. Thus, the learning
process of the network is provided. After learning
process is done the network performance is measured by
giving test data to the network. 100% of the training
results to be consistent in terms of training are important.
- Determining Topological Structure of the Network: The
numbers of input unit, hidden layers and neurons in
layers are determined in this section.
- Determining the training parameters: Parameters such
as learning coefficient of the network, the momentum
coefficient, collecting and activation functions is
determined.
-Training Stage: The test data is given to the network.
The network output corresponds to the given data to
Hidden and output layer is calculated. Until the expected
output value reaches to the acceptable error rate, training
is continued by updating the weight of the layers. The
weights updating process is done in accordance with the
selected learning rule. Training is completed by
calculating the output with an acceptable error.
-Test Stage: After training the network, the network
performance is measured with test data is not given
previously [19].
MLFFNN network which includes an input layer
consisting of 17 neurons and an output layer consisting
of one neuron was used in this study. Tansig activation
function was preferred in the hidden layer and purelin
linear activation function was preferred in the output
layer. The better results were obtained when between 20
and 40 neurons used in the hidden layer. The best result
was obtained when used 35 neurons. A single output is
seen as “0” for diseased subjects input and “1” for healthy
subjects input at the exit part. "Levenberg-Marquardt
(LM)” learning algorithm was chosen as the learning
algorithm.
NH =35Ni=17
-SSRLT(4)
-SSRMAXG(4)
-SSRTT(3)
-VAS(1)
-VRS(1)
-BDI(1)
-BAI(1)
-HAM-D(1)
-HARS(1)
0=Fibromyalgia
1=Healthy
Hidden Layer Output LayerInput Layer
IW 1,1 LW 2,1
b 2b
111
No =1
Figure 2: MLFFNN for SSR associated with the psychological test scores
6. SIMULATION RESULTS
Flow chart of this study was shown in Figure 3 and the
artificial neural network model was shown in Figure 4. In
the input layer, nine features which contain three features
of SSR and six features of psychological tests were used
as inputs.
42 of 57 FMS subjects were chosen to participate in
experiment one that its results to be used as the training
data, remaining 15 reserved for testing procedure and 22
of 29 control subjects were chosen to participate in
experiment one that its results to be used as the training
data, remaining 7 reserved for testing procedure.
The goal was 10-6 for a mean squared error. Levenberg-
Marquardt Algorithms reached the goal at 6 epochs as
seen figure 4.
Figure 3: Flow chart of the study
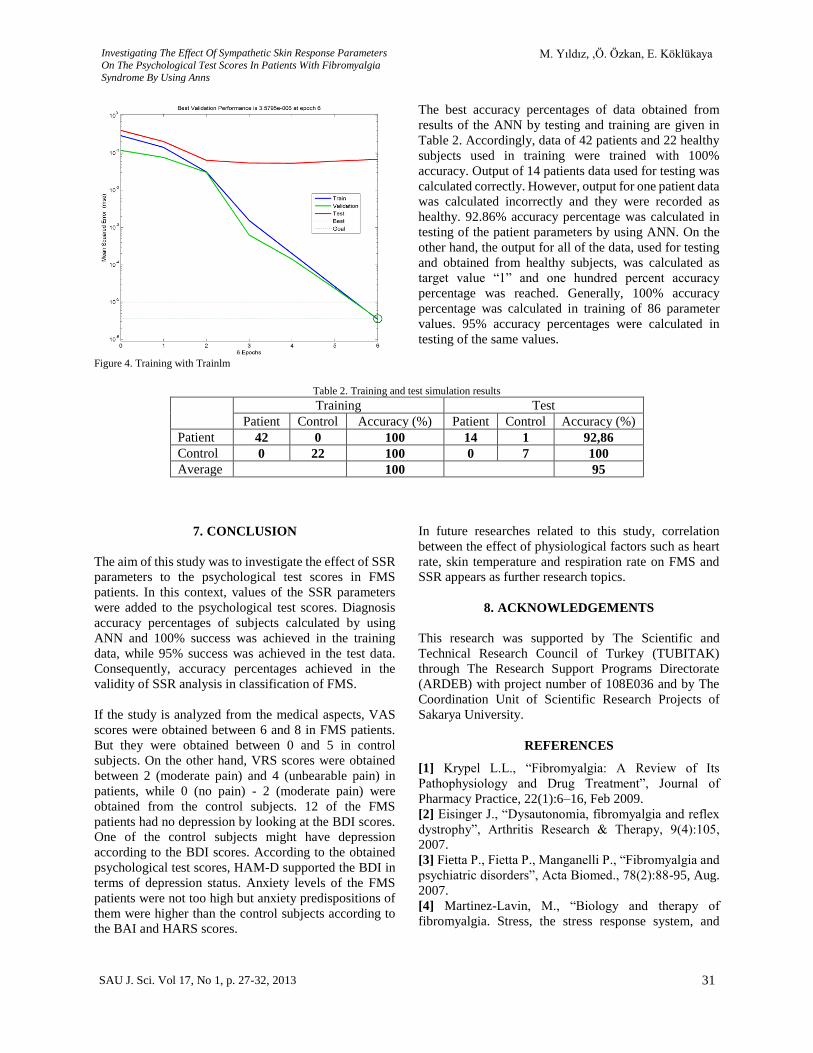
Investigating The Effect Of Sympathetic Skin Response Parameters
On The Psychological Test Scores In Patients With Fibromyalgia
Syndrome By Using Anns
M. Yıldız, ,Ö. Özkan, E. Köklükaya
SAU J. Sci. Vol 17, No 1, p. 27-32, 2013 31
Figure 4. Training with Trainlm
The best accuracy percentages of data obtained from
results of the ANN by testing and training are given in
Table 2. Accordingly, data of 42 patients and 22 healthy
subjects used in training were trained with 100%
accuracy. Output of 14 patients data used for testing was
calculated correctly. However, output for one patient data
was calculated incorrectly and they were recorded as
healthy. 92.86% accuracy percentage was calculated in
testing of the patient parameters by using ANN. On the
other hand, the output for all of the data, used for testing
and obtained from healthy subjects, was calculated as
target value “1” and one hundred percent accuracy
percentage was reached. Generally, 100% accuracy
percentage was calculated in training of 86 parameter
values. 95% accuracy percentages were calculated in
testing of the same values.
Table 2. Training and test simulation results
Training Test
Patient Control Accuracy (%) Patient Control Accuracy (%)
Patient 42 0 100 14 1 92,86
Control 0 22 100 0 7 100
Average 100 95
7. CONCLUSION
The aim of this study was to investigate the effect of SSR
parameters to the psychological test scores in FMS
patients. In this context, values of the SSR parameters
were added to the psychological test scores. Diagnosis
accuracy percentages of subjects calculated by using
ANN and 100% success was achieved in the training
data, while 95% success was achieved in the test data.
Consequently, accuracy percentages achieved in the
validity of SSR analysis in classification of FMS.
If the study is analyzed from the medical aspects, VAS
scores were obtained between 6 and 8 in FMS patients.
But they were obtained between 0 and 5 in control
subjects. On the other hand, VRS scores were obtained
between 2 (moderate pain) and 4 (unbearable pain) in
patients, while 0 (no pain) - 2 (moderate pain) were
obtained from the control subjects. 12 of the FMS
patients had no depression by looking at the BDI scores.
One of the control subjects might have depression
according to the BDI scores. According to the obtained
psychological test scores, HAM-D supported the BDI in
terms of depression status. Anxiety levels of the FMS
patients were not too high but anxiety predispositions of
them were higher than the control subjects according to
the BAI and HARS scores.
In future researches related to this study, correlation
between the effect of physiological factors such as heart
rate, skin temperature and respiration rate on FMS and
SSR appears as further research topics.
8. ACKNOWLEDGEMENTS
This research was supported by The Scientific and
Technical Research Council of Turkey (TUBITAK)
through The Research Support Programs Directorate
(ARDEB) with project number of 108E036 and by The
Coordination Unit of Scientific Research Projects of
Sakarya University.
REFERENCES
[1] Krypel L.L., “Fibromyalgia: A Review of Its
Pathophysiology and Drug Treatment”, Journal of
Pharmacy Practice, 22(1):6–16, Feb 2009.
[2] Eisinger J., “Dysautonomia, fibromyalgia and reflex
dystrophy”, Arthritis Research & Therapy, 9(4):105,
2007.
[3] Fietta P., Fietta P., Manganelli P., “Fibromyalgia and
psychiatric disorders”, Acta Biomed., 78(2):88-95, Aug.
2007.
[4] Martinez-Lavin, M., “Biology and therapy of
fibromyalgia. Stress, the stress response system, and

M. Yıldız, ,Ö. Özkan, E. Köklükaya Investigating The Effect Of Sympathetic Skin Response Parameters
On The Psychological Test Scores In Patients With Fibromyalgia
Syndrome By Using Anns
32 SAU J. Sci. Vol 17, No 1, p. 27-32, 2013
fibromyalgia”, Arthritis Research & Therapy, 9(4):216,
2007.
[5] Toyukara, M., “Sympathetic skin responses: the
influence of electrical stimulus intensity and habituation
on the waveform”, Clinical Autonomic Research,
16(2):130-135, 2006.
[6] Özkan Ö., Yildiz M., Köklükaya E., “The Correlation
Of Laboratory Tests And Sympathetic Skin Response
Parameters By Using Artificial Neural Networks In
Fibromyalgia Patients”, Journal of Medical Systems,
36(3):1841-1848, June 2012.
[7] Ahuja N.D., Agarwal A.K., Mahajan N.M., Mehta
N.H., Kapadia H.N., “GSR and HRV:Its Application in
Clinical Diagnosis”, Computer-Based Medical Systems,
2003, Proceedings, 16th IEEE Symposium, 279-283,
India, 26-27 June 2003,.
[8] Martinez-Lavin, M., Vargas, A., “Complex adaptive
systems allostasis in fibromyalgia”, Rheumatic Disease
Clinics of North America, 35(2):285-298, July 2009.
[9] Özkan, Ö., Yildiz, M., Bilgin, S., Köklükaya, E.,
“Measuring the Sympathetic Skin Response on Body and
Using as Diagnosis-Purposed for Lung Cancer Patients
by Artificial Neural Networks”, Journal of Medical
Systems, 34(3):407-412, June 2010.
[10] Özkan, Ö., Yıldız, M., Köklükaya, E., “Fibromiyalji
sendromunun teşhisinde kullanılan laboratuar testlerinin
sempatik deri cevabı parametreleriyle desteklenerek
teşhis doğruluğunun arttırılması", Sakarya Üniversitesi
Fen Bilimleri Enstitüsü Dergisi, 15(1): 1-7, Haziran
2011.
[11] Ries, A.L., Bauldoff, G.S., Carlin, B.W., Casaburi,
R., Emery, C.F., Mahler, D.A., Make, B., Rochester,
C.L., Zuwallack, R., Herrerias, C., “Pulmonary
rehabilitation: Joint ACCP/AACVPR evidence based
guidelines”, Chest., 131(5):4-42, May 2007.
[12] Perez-Higueras, A., Alvarez, L., Rossi, R.,
Quinones, D., Al-Assir, I., “Percutaneous vertebroplasty:
Long term clinical and radiological outcome”,
Interventional Neuroradiology, 44(11):950-954, 2002.
[13] Çakır, T., Evcik, D., Dündar, Ü., Yiğit, İ., Kavuncu,
V., “Evaluation of sympathetic skin response and F-wave
in fibromyalgia syndrome patients”, Turkish Journal of
Rheumatology, 26(1):38-43, 2011.
[14] Ulusoy M., Şahin N.H., Erkmen H., “Turkish
version of the Beck Anxiety Inventory: Psychometric
properties”, Journal of Cognitive Psychotherapy,
12(2):163-172, 1998
[15] Shear, M.K., Bilt, J.V., Rucci, P., Endicott, J.,
Lydiard, B., Otto, M.W., Pollack, M.H., Chandler, L.,
Williams, J., Ali, A., Frank, D.M., “Reliability and
validity of a structured interview guide for the Hamilton
Anxiety Rating Scale (SIGH-A)”, Depression and
Anxiety, 13(4):166-178, 2001.
[16] Aben, I., Verhey, F., Lousberg, R., Lodder, J.,
Honig, A., “Validity of the Beck depression inventory,
hospital anxiety and depression scale, SCL-90, and
Hamilton depression rating scale as screening
instruments for depression in stroke patients”,
Psychosomatics, 43(5):386-393, 2002.
[17] Wolfe, F., Smythe, H.A., Yunus, M.B., “The
American College of Rheumatology 1990 criteria for the
classification of fibromyalgia”, Report of the Multicenter
Criteria Committee., Arthritis Rheumatology, 33(2):160-
172, Feb. 1990.
[18] Chroni, E., Argyriou, A.A., Polychronopoulos, P.,
Sirrou, V., “The effect of stimulation technique on
sympathetic skin responses in healthy subjects”, Clinical
Autonomic Research, 16(6):96-400, 2006.
[19] Öztemel, E. , “Yapay Sinir Ağları”, Papatya
Yayıncılık, 2003.

SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 33-40, 2013 SAU J. Sci. Vol 17, No 1, p. 33-40, 2013
33
İnternet ortamındaki tüketici yorumlarından özet bilgi çıkarımı
Kadriye Ergün1*, Cemalettin Kubat2, Gültekin Çağıl2, Raşit Cesur2
1*Balıkesir Üniversitesi, Mühendislik Mimarlık Fakültesi, Endüstri Mühendisliği, Balıkesir
2Sakarya Üniversitesi, Mühendislik Fakültesi, Endüstri Mühendisliği, Sakarya
13.09.2012 Geliş/Received, 27.11.2012 Kabul/Accepted
ÖZET
Bu çalışmada, metin madenciliği tekniklerinden yararlanılarak bir ürün hakkındaki yorumları otomatik olarak
değerlendirip özetlemek için geliştirilmiş bir sistem tanıtılmıştır. İncelenen veriler doğal dilde yazılmış metinler
olduğundan öncelikle morfolojik analiz işleminden geçirilmiştir. Metinler içerisinde ürün özelliğini gösteren
kelimeler ve pozitif-negatif anlamlı sıfatlar belirlenmiştir. Niteleyen ve nitelenen kelimelerin tespiti için ise Türkçe
dilbilgisi kurallarına göre ağaç yapısı oluşturulmuştur. Ağaç yapısı üzerinde Derinlik Öncelikli Arama algoritması
kullanan bir yazılım geliştirilmiştir. Yazılımın çalıştırılması sonucunda elde edilen veriler SQL veritabanında
depolanmaktadır. Bu verilerden ürünün herhangi bir özelliğine göre sorgulama yapıldığında, o özellik hakkında
memnuniyet derecesini ifade eden sayısal bilgiler elde edilerek yorumlanmıştır.
Anahtar Kelimeler: Metin madenciliği, Bilgi çıkarımı, Doğal dil işleme
Abstract information extraction from consumer's comments on internet media
ABSTRACT
In this study, a system developed to summarize by automatically evaluating comments about product with using text
mining techniques will be described. The data has been primarily went through morphological analysis process,
because they are texts written in natural language. Words and adjectives meaning positive or negative are
determined. They show product features in texts. The tree structure is established according to Turkish grammar
rules as subordinate and modified words are designated. The software which uses the depth-first search algorithm on
the tree structure is developed. Data from result of software is stored in the SQL database. When any inquiry is made
from these data depending on any property of product, numerical information which indicates the degree of
satisfaction about this property is obtained. .
Keywords: Text Mining, Information Extraction, Natural Language Processing
* Sorumlu Yazar / Corresponding Author
K. Ergün, C. Kubat, G. Cağıl R. Cesur İnternet Ortamındaki Tüketici Yorumlarından Özet Bilgi
Çıkarımı
34 SAU J. Sci. Vol 17, No 1, p. 33-40, 2013
1. GİRİŞ
Teknolojinin gelişmesi tüketicilerin davranışlarında bazı
değişiklikler meydana getirmiştir. Bunlardan birisi de
alışveriş alışkanlıklarının kazandığı yeni boyuttur.
Gelişen teknoloji, tüketicilere internet ortamında da
alışveriş imkanı sağladığından bazı ürün veya
hizmetlerin satın alma işlemleri sanal ortamda daha çok
yapılır hale gelmiştir. Çünkü bu tür bir alışverişlerde
tüketicinin daha fazla bilgiye, daha kolay ulaşabilmesi,
ürün ve firmalar arasındaki karşılaştırmaları daha kolay
yapabilmesi ve coğrafi sınırların kalkması gibi
avantajlar bulunmaktadır [1]. İnternet kullanıcılarının
aynı zamanda potansiyel bir müşteri ya da tüketici
olduğu varsayıldığında satın alma davranışlarını
etkileyen faktörler arasında fiziksel alışverişlerde
olduğu gibi başkalarının görüşleri de yer almaktadır.
Tüketicilerin satın alma davranışlarını etkileyen en
önemli unsurlardan birinin başka tüketicilerin görüşleri
olduğu bilinmektedir. Ürün ve firma bilgileri gibi
tüketici görüşleri de elektronik ortam sayesinde, satın
alma işlemi gerçekleşsin ya da gerçekleşmesin geniş
kitlelere ulaşmaktadır. Ancak bunun başka bir sonucu
da ürün veya hizmetler hakkında yapılan yorumların
sayısının arttığı gerçeğidir. Artan sayıdaki yorumlar
içinde ürün ile ilgili memnuniyet derecesine ulaşmak
oldukça zaman alıcı ve zordur. Bu durum, en kısa
sürede istenilen bilgilere ulaşabilmek için otomatik
olarak özet bilgi çıkarılmasını zorunlu hale getirmiştir.
Bu çalışmada, internet ortamında yer alan ürün
yorumlarından olumlu ve olumsuz görüşlerin metin
madenciliği yöntemleri ile analiz edilmesi sonucu
tüketiciye özet bilgi sunulması amacıyla geliştirilmiş bir
sistem anlatılmıştır.
Çalışmanın devamında metin madenciliği hakkında
bilgi verilmiş olup geliştirilen sistem açıklanmaktadır.
Geliştirilen sistemin beklenen faydaları ve gelecek
çalışmalar sonuç bölümünde yer almaktadır.
2. METİN MADENCİLİĞİ
Veriler nitelikleri bakımından yapısal, yarı yapısal ve
yapısal olmayan olmak üzere üç grupta toplanmaktadır.
Yarı yapısal veriler, metin, resim, grafik vs. olan
belgelerden oluşmaktadır. Günlük hayata bakıldığında
gazeteler, makaleler, raporlar birer belgedirler. Veri
niteliği taşıyan bu belgeler çok önemli bilgiler
içermelerine rağmen çoğu zaman bu bilgilere
ulaşılamaz. Bu tür verilerin incelenmesinde metin
madenciliği teknikleri öne çıkmaktadır [2].
Metin madenciliği, belirli bir formatta olmayan yazı
tipindeki veriler içerisinde gizli olan nitelikli bilginin
çıkarılması, düzensiz haldeki verinin formatlanması
sürecini içermektedir [3].
Metin madenciliğinde veri kaynakları, işletme
dokümanları, müşteri yorumları, web sayfaları ve xml
dosyaları gibi yarı yapısal veya yapısal olmayan
verilerden oluşmaktadır. Buradan elde edilen
bilgilerden, analizi yapılmış metin kaynaklarında açık
olarak görülmeyen ilişkiler, hipotezler veya eğilimler
olduğu anlaşılır [4,5].
Metin madenciliği metotları dört grupta toplanabilir [6].
Bilgiye Erişim (Information Retrieval),
Bilgi Çıkarımı (Information Extraction),
Web Madenciliği (Web Mining),
Kümeleme (Clustering),
Bu yöntemler kısaca açıklanmak istenirse, Bilgiye
Erişim, metin madenciliğinde ilk adım olarak
nitelendirilmektedir. Bilgiye erişimin amacı
kullanıcıların bilgi ihtiyaçlarını karşılayacak olan
belgeleri bulmasına yardımcı olmaktır [7]. Bilgi
Çıkarımı, genellikle bir metin üzerinde doğal dil işleme
kullanılarak belirli kriterdeki bilgileri elde etmeyi
hedefler [8]. Web madenciliği, access log dosyaları,
kullanıcı kayıt bilgileri, oturum ve hareket bilgileri, site
yapısı ve içeriği gibi çeşitli yapıdaki web sayfaları
dokümanlarını ve kayıt bilgilerini incelemek, bunlardaki
kalıpları keşfetmek için veri madenciliği tekniklerinin
kullanılması olarak tanımlanabilir [9]. Kümeleme ise
önceden belirlenmiş bir kategoriler kümesine sahip
olmaksızın birbirine benzer belgelerin gruplandırılması
işlemi olarak tanımlanabilir [10].
Bu metotlara ait girdi kaynakları ve elde edilen çıktılar
Tablo 1.’de gösterilmiştir.
Tablo 1. Metin madenciliği metotlarının girdi kaynakları ve çıktıları [6]
Bilgiye
Erişim
Bilgi Çıkarımı Web
Madenciliği
Kümeleme
Girdi:
Metin Belgesi
Kaynağı,
Kullanıcı
sorgusu (metin tabanlı)
Çıktı:Sorgu ile ilişkili olan
sıralanmış
belgeler kümesi
Girdi:Metinsel belgeler
kaynağı
İyi tanımlanmış sınırlandırılmış sorgu
Çıktı: İlişkili bilgi
cümleleri İlişkili
bilginin çıkarımı ve
ilişkili olmayan bilginin yok sayılması
Önceden
belirlenmiş formatta çıktı ve ilgili bilgi
linki.
Webteki özel
bilginin
çıkarımı ve metinsel
belgelerin
erişimi ve indekslenmesi
Benzer metin
belgelerinin
toplanması
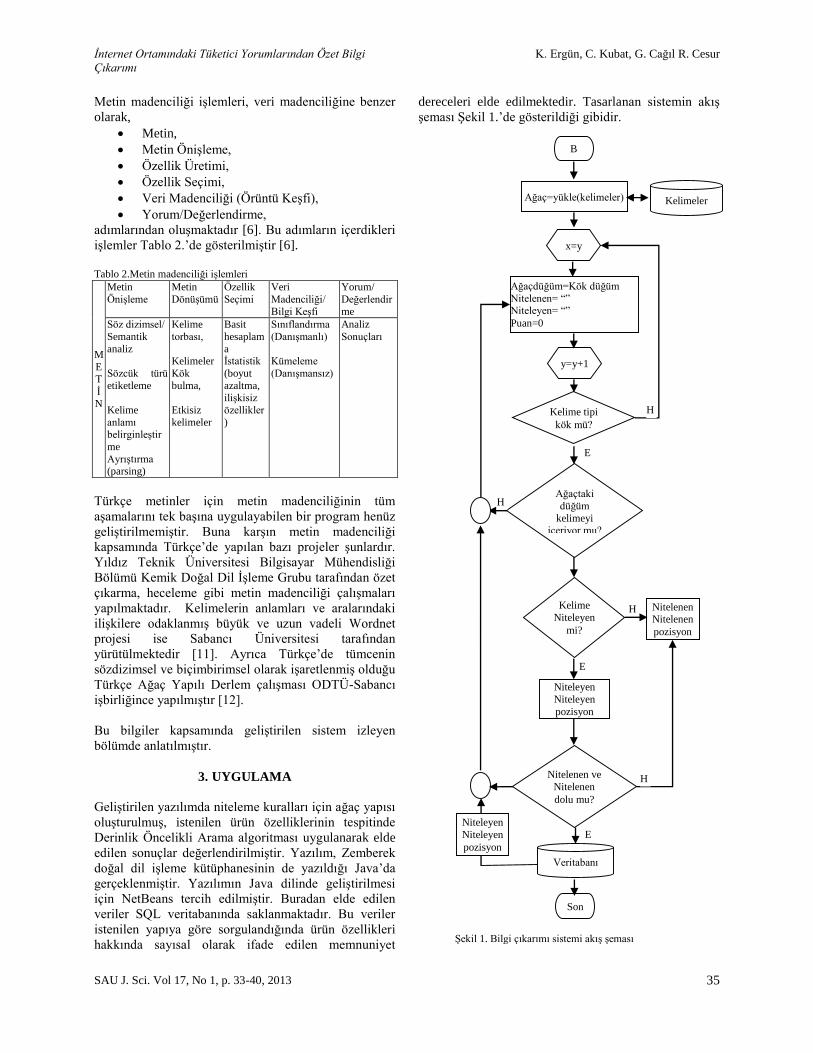
İnternet Ortamındaki Tüketici Yorumlarından Özet Bilgi
Çıkarımı
K. Ergün, C. Kubat, G. Cağıl R. Cesur
SAU J. Sci. Vol 17, No 1, p. 33-40, 2013 35
Metin madenciliği işlemleri, veri madenciliğine benzer
olarak,
Metin,
Metin Önişleme,
Özellik Üretimi,
Özellik Seçimi,
Veri Madenciliği (Örüntü Keşfi),
Yorum/Değerlendirme,
adımlarından oluşmaktadır [6]. Bu adımların içerdikleri
işlemler Tablo 2.’de gösterilmiştir [6].
Tablo 2.Metin madenciliği işlemleri
M
E T
İ
N
Metin
Önişleme
Metin
Dönüşümü
Özellik
Seçimi
Veri
Madenciliği/
Bilgi Keşfi
Yorum/
Değerlendir
me
Söz dizimsel/
Semantik
analiz
Sözcük türü
etiketleme
Kelime
anlamı belirginleştir
me
Ayrıştırma (parsing)
Kelime
torbası,
Kelimeler
Kök
bulma,
Etkisiz
kelimeler
Basit
hesaplam
a İstatistik
(boyut
azaltma, ilişkisiz
özellikler
)
Sınıflandırma
(Danışmanlı)
Kümeleme
(Danışmansız)
Analiz
Sonuçları
Türkçe metinler için metin madenciliğinin tüm
aşamalarını tek başına uygulayabilen bir program henüz
geliştirilmemiştir. Buna karşın metin madenciliği
kapsamında Türkçe’de yapılan bazı projeler şunlardır.
Yıldız Teknik Üniversitesi Bilgisayar Mühendisliği
Bölümü Kemik Doğal Dil İşleme Grubu tarafından özet
çıkarma, heceleme gibi metin madenciliği çalışmaları
yapılmaktadır. Kelimelerin anlamları ve aralarındaki
ilişkilere odaklanmış büyük ve uzun vadeli Wordnet
projesi ise Sabancı Üniversitesi tarafından
yürütülmektedir [11]. Ayrıca Türkçe’de tümcenin
sözdizimsel ve biçimbirimsel olarak işaretlenmiş olduğu
Türkçe Ağaç Yapılı Derlem çalışması ODTÜ-Sabancı
işbirliğince yapılmıştır [12].
Bu bilgiler kapsamında geliştirilen sistem izleyen
bölümde anlatılmıştır.
3. UYGULAMA
Geliştirilen yazılımda niteleme kuralları için ağaç yapısı
oluşturulmuş, istenilen ürün özelliklerinin tespitinde
Derinlik Öncelikli Arama algoritması uygulanarak elde
edilen sonuçlar değerlendirilmiştir. Yazılım, Zemberek
doğal dil işleme kütüphanesinin de yazıldığı Java’da
gerçeklenmiştir. Yazılımın Java dilinde geliştirilmesi
için NetBeans tercih edilmiştir. Buradan elde edilen
veriler SQL veritabanında saklanmaktadır. Bu veriler
istenilen yapıya göre sorgulandığında ürün özellikleri
hakkında sayısal olarak ifade edilen memnuniyet
dereceleri elde edilmektedir. Tasarlanan sistemin akış
şeması Şekil 1.’de gösterildiği gibidir.
B
Kelimeler Ağaç=yükle(kelimeler)
x=y
y=y+1
Nitelenen Nitelenen
pozisyon
Ağaçdüğüm=Kök düğüm
Nitelenen= “” Niteleyen= “”
Puan=0
Kelime tipi
kök mü?
Ağaçtaki
düğüm
kelimeyi içeriyor mu?
Son
H
E
H
E
H
H
H
E Niteleyen
Niteleyen
pozisyon
Nitelenen ve
Nitelenen
dolu mu?
Kelime
Niteleyen
mi?
Niteleyen
Niteleyen
pozisyon
Veritabanı
Şekil 1. Bilgi çıkarımı sistemi akış şeması

K. Ergün, C. Kubat, G. Cağıl R. Cesur İnternet Ortamındaki Tüketici Yorumlarından Özet Bilgi
Çıkarımı
36 SAU J. Sci. Vol 17, No 1, p. 33-40, 2013
Bu akışa göre geliştirilen sistemin aşamaları aşağıdaki
gibi özetlenebilir.
Seçilen telefon ürününe ait 100 adet yorum ve ürün
özellikleri hakkındaki bilgiler www.hepsiburada.com
adresinden hazırlanan özel bir yazılım ile elde
edilmiştir.
Geliştirilen yazılım yardımıyla Zemberek programı
kullanılarak cümlelerin Morfolojik Analizi yapılır.
Morfolojik Analiz sonucunda her bir kelimenin türü,
ekleri, ek türleri ve kökleri tespit edilmiş olur.
Sıfat-isim ilişkileri, Türkçe’nin dilbilgisi kurallarının
ağaç yapısına dönüştürülmesi sonucu ve derinlik
öncelikli arama algoritması yardımıyla otomatik olarak
belirlenir.
Niteleyen (sıfat) kelimeler anlamlarına göre
derecelendirilir. Anlamca olumlu kelimeler daha yüksek
bir puanla derecelendirilirken olumsuzluk içeren
kelimeler düşük puanla temsil edilir. Bu şekilde
niteleyen kelimeler artık rakamsal verilere
dönüştürülmüş olur.
Oluşturulan sıfat sözlüğünden niteleme dereceleri alınır.
Tüm yorumlar incelendiğinde ürünün aynı özelliğine ait
sıfatların olumluluk-olumsuzluk derecelerinin
ortalaması alınarak sayısal bir memnuniyet derecesine
ulaşılır. Bu bilgiler tablo şeklinde sunulur.
Bu çalışmada incelenen ürün telefondur. Telefona
ilişkin ürün özellik isimleri ve bu özellik isimlerini
içeren diğer kelimeler mevcut yorumlardan manuel
olarak tespit edilmiştir. Telefona ait ürün özelliği
tablosu ve bu özellikleri ifade eden eş veya benzer
kelimeler Tablo 3.’de yer almaktadır.
Tablo 3. Ürün Özellik İsimleri ve Eş veya Benzer Kelimeler
özellik eş-benzer içeren anlamlar
batarya şarj pil
tasarım dizayn görünüm ekran dokunmatik telefon ürün görünüş
kullanım kullanılabilirlik telefon tuş takımı renk
ses mp3 müzik kulaklık
kamera fotoğraf resim çekim zoom video Çözünürlük
fiyat fiyat/performans pahalı ucuz para fiyat
boyut ebat ağırlık ince kalın
Hafıza radyo tv video radyo mobil TV hafıza kartı GB Bayt
bağlantı
özellikleri bluetooth GPRS GPS internet wifi Navigasyon 3G
işletim sistemi symbian V30 yazılım sürüm
problem sorun eksi
Bu aşamaların açıklaması ve geliştirilen sisteme ait
kısıtlar ve kabuller izleyen bölümlerde yer almaktadır.
3.1. Uygulamaya Ait Kabuller
Metin madenciliğinin ilk aşaması olan ön işleme
sürecinin uygulanabilmesi için kullanılan dilin
özelliklerinin bilinmesi gerekmektedir. Buna göre,
Türkçe bitişken bir dildir. Her bir kelime, bir kök ve bu
kökün sonuna eklenmiş olan eklerden oluşur. Her ek
kelimeye yeni bir anlam kazandırır. Kelimelerin aldığı
ekler temelde yapım ve çekim ekleri olarak ikiye ayrılır.
Yapım ekleri kelime köklerine bitişerek kelimenin hem
anlamını hem de türünü değiştirirler. Çekim ekleri ise
kelimenin anlamını değiştirmemekle birlikte, türünü
değiştirebilmektedir.
Türkçe’de kelime türleri isim, sıfat, zamir, zarf, edat,
bağlaç, ünlem ve eylem olmak üzere 8 sınıfta
incelenirler. Bu çalışmada değerlendirme için isim ve
sıfatlar kullanıldığından sadece ürün özellik isimlerinin
çekim eki alıp almadığına bakılmıştır.
Geliştirilen sistemde öncelikli sorun, kelime türlerinin
tespitinden sonra hangi kelimenin ürünün hangi
özelliğini nitelediğini bulmaktır. Bir ürünün bir özelliği
hakkında olumlu ya da olumsuz düşünceyi cümle içinde
yer alan sıfatlar belirtmektedir. Sıfatlar, niteleme
sıfatları ve belirtme sıfatları olmak üzere ikiye ayrılır.
Niteleme sıfatları, varlıkların durumlarını biçimlerini
renklerini kısaca nasıl olduklarını bildiren kelimelere
verilen isimdir. Kısaca nasıl sorusunun karşılığı olan
sıfatlardır. Bu çalışmada bir ismin niteliği incelendiği
için niteleme sıfatları ile ilgilenilmiştir.

İnternet Ortamındaki Tüketici Yorumlarından Özet Bilgi
Çıkarımı
K. Ergün, C. Kubat, G. Cağıl R. Cesur
SAU J. Sci. Vol 17, No 1, p. 33-40, 2013 37
Türkçe’de sıfatların anlamca pozitif ya da negatiflikleri
eşit değildir. Dilimizde fiiller –ma ekiyle olumsuz hale
getirebilirler. Fakat isim veya sıfatların anlamca olumlu
olup olmadıkları aldıkları eke veya kelimenin köküne
bakılarak belirlenemez. Bu nedenle anlamca olumlu ve
olumsuz olan sıfatlar, yazarlar tarafından
belirlenmelidir. Örneğin “iyi” ve “kötü” kelimeleri
sıfattır. (Cümle içinde isim de olabilirler). “İyi” anlamca
olumlu iken “kötü” olumsuzdur. Bu yüzden sıfatlar
derecelendirilmelidir. Bu nedenle niteleme sıfatlarının
temsil ettikleri memnuniyet dereceleri 1 ve 5 arasında
negatiften pozitife doğru artan bir skala ile
puanlanmıştır. Türk Dil Kurumunca hazırlanan
sözlükler kaynak alınıp en çok kullanıldığı düşünülerek
derecelendirilen 500 adet sıfat ile ilgili örnek puanlama,
Tablo 4.’te verilmiştir. Bu tabloda sadece kesin yargı
belirttiği düşünülen sıfatlar derecelendirilmiştir. Bir sıfat
“değil” kelimesi ile birlikte kullanıldığında anlamda
değişim olduğundan değişen puanı da aynı tabloda yer
alarak sisteme dahil edilmiştir.
Tablo 4. Niteleme Sıfatları Puanları
sıfat puan değil
acayip 2 3
acemi 2 3
acı 1 4
adil 5 0
aksak 1 4
başarılı 5 0
başarısız 1 4
basit 3 2
berbat 1 4
beter 1 4
Yazılımdaki diğer bir kabul ise niteleme ilişkilerinin
belirlenmesinde görülmektedir. Buna göre nitelenen
kelime ile niteleyen kelime arasındaki kelime sayısının
ortalama 5 kelime olduğu varsayılmıştır. Bu
sınırlandırma olmadığı takdirde bir cümlede geçen
niteleyen başka bir cümledeki kelimeyi nitelemektedir.
3.2. Ürün Özellik İsimleri ve Niteleme İlişkilerinin
Belirlenmesi
Yorumlar ön işleme yöntemlerinden geçirilip işlenmeye
hazır hale getirilmelidir. Metin ön işleme, Doğal Dil
İşleme yöntemlerinin kullanımını gerektirir. Bu
aşamada Türkçe diline ilişkin çeşitli bilgi işlem
problemlerinin çözümlenmesi için oluşturulmuş açık
kaynak kodlu bağımsız bir kütüphane olan Zemberek
programından faydanılmıştır. Bu adımdan sonra elde
edilen çıktılar şu şekilde olmaktadır.
Sözcüklerin kökleri ve türleri bulunur.
Sözcüklerin aldıkları ekler ve türleri bulunur.
Bu çıktıya ait örnek Tablo 5.’teki gibidir.
Tablo 5. Cümlelerin morfolojik analizinin sonucu örneği
id
metin
_no
kelime
_no kelime incelenen tip tur
0 0 0 BEN ben <kok> ZAMIR
1 0 1 BU bu <kok> ZAMIR
2 0 2
ÜRÜN
Ü ürün <kok> ISIM
3 0 2
ÜRÜN
Ü I <ek>
ISIM_TAM
LAMA_I
4 0 3 BİR bir <kok> SAYI
5 0 4 YIL yıl <kok> FIIL
Bu adımdan sonra isimlerin hangi sıfatlar tarafından
nitelendiğini belirlemek gerekir. Bunu belirleyebilmek
için isme getirilen çekim ekleri göz önüne alınmıştır. Bu
çalışmada Cebiroğlu(2002) tarafından yapılan yüksek
lisans tezinde Sonlu Durum Makineleri ile ifade edilen
ek türleri ve tanımlamalar temel alınmış ve bunlara
Zemberek programında karşılık gelen tanımlamaları
belirlenmiştir [13].
3.3. Ağaç Yapısı ve Arama Algoritması
Bilgi çıkarımı için geliştirilen yazılımda en önemli kısıt,
daha önce de belirtildiği gibi yapılan yorumlarda hangi
ifadenin hangi özelliği nitelediğini bulmaktır. Bu işlemi
otomatik olarak gerçekleştirebilmek için bazı kurallara
ihtiyacımızın olduğu açıktır. Bir dilde herhangi bir
durum hakkındaki görüşü nasıl sorusuna verilen
cevaplar belirlemektedir. Nasıl sorusunun cevabı isim-
sıfat veya zarf-fiil ilişkilerinden oluşan bileşenlerdir. Bu
kelimeler arasındaki ilişkiler, dilin yapısına göre kelime
türü, kelime kökü ve kelimenin aldığı eklerden
faydanılarak oluşturulan kuralların ağaç yapısı haline
getirilmesi ve arama algoritması yardımıyla elde
edilmiştir. Ağaç yapısındaki niteleme kuralları Tablo
6.’da görülmektedir. Bu yapıda aynı sıfatın başka bir
cümledeki ismi nitelemesini engellemek için niteleme
çeşitleri puanlandırılmıştır. Buna göre en yüksek puanda
olan ilişkideki kelimeler niteleyen ve nitelenen olarak
belirlenmiştir. Niteleyen kelimeler 2, Nitelenen
kelimeler 1 ile ifade edilmiştir.

K. Ergün, C. Kubat, G. Cağıl R. Cesur İnternet Ortamındaki Tüketici Yorumlarından Özet Bilgi
Çıkarımı
38 SAU J. Sci. Vol 17, No 1, p. 33-40, 2013
Tablo 6. Ağaç Yapısında Niteleme Kuralları ve Puanları
agac tip Tur niteleme puan
1 kok SIFAT 2 1
1 kok ISIM 1 0
2 kok ISIM 1 1
2 ek ISIM_BELIRTME_I 0 0
2 kok SIFAT 2 1
2 ek
ISIM_TANIMLAMA_
DIR 0 0
3 kok ISIM 0 0
3 ek ISIM_TAMLAMA_IN 0 0
3 kok ISIM 1 1
3 ek ISIM_TAMLAMA_I 0 0
3 kok SIFAT 2 1
3 kok SIFAT 2 1
4 kok ISIM 0 0
4 ek ISIM_TAMLAMA_IN 0 0
4 kok SIFAT 2 1
4 kok SIFAT 2 1
4 kok ISIM 1 1
4 ek ISIM_BELIRTME_I 0 0
5 kok ISIM 1 1
5 kok BAGLAC 0 1
5 kok ISIM 1 1
5 kok SIFAT 2 1
6 kok ISIM 1 0
6 ek SIFAT 2 0
6 kok ISIM_BULUNMA_LI 0 1
6 kok ISIM 1 1
6 ek
ISIM_TANIMLAMA_
DIR 0 1
Ağaç yapısının oluşturulmasından sonra bu yapı
üzerinde kurallara uygun kalıpların belirlenebilmesi için
Derinlik Öncelikli Arama Algoritması kullanılmıştır.
Derinlik öncelikli arama (Depth-first search)
algoritmasında en son açılan düğüm takip edilerek yeni
durumlar oluşturulur. Derinlik öncelikli aramada daima
ağacın en derin düğümlerinden biri açılır. Potansiyel
çözümünün çok derinlerde olmadığı durumlarda yaygın
olarak kullanılmaktadır. Derinlik öncelikli aramada eğer
amaçlanmayan düğüme erişilmiş ise veya açılacak
düğüm kalmamış ise açma işlemine daha sığ
seviyelerden devam edilir [14]. Bu yapıya göre elde
edilen örnek çıktı Tablo 7.’de verilmiştir.
Tablo 7. Niteleme-Niteleyen İlişki Puanları
164 163 kötü görüntü 3
164 163 kötü görüntü 0
164 163 kötü görüntü 0
164 163 kötü görüntü 0
164 163 kötü görüntü 0
165 166 iyi değil 2
165 166 iyi değil 1
171 170 güzel telefon 0
171 174 güzel mesaj 0
177 175 kötü sesi 3
177 175 kötü sesi 1
177 178 kötü Telefonu 1
177 178 kötü Telefonu 1
185 180 güzel hafta 1
185 186 güzel telefon 1
185 186 güzel telefon 1
Tablo 7.’de son sütunda ilişki durumunun puanı yer
almaktadır. En yüksek puanlı ilişki durumu tespit
edildiğinde sonuç çıktı Tablo 8.’deki gibi olacaktır.
Burada dikkate alınan diğer husus ise sıfatın devamında
“değil” ifadesinin yer alıp almadığıdır. Çünkü değil
ifadesi belirtilen yargı tersine çevirmektedir. “iyi” ve
“iyi değil” kelimeleri aynı sıfatı içermekte fakat anlam
olarak farklılık göstermektedir. “iyi” kelimesi pozitif
olarak değerlendirilirken “değil” ifadesi ile birlikte yer
alması anlamı negatif yapar. Bu nedenle yukarıda da
belirtildiği gibi “değil” ifadesi geliştirilen sistemde
ayrıca tespit edilmiştir.
Tablo 8. Niteleme Durumu
Niteleyen
Id
Nitelenen
Id niteleyen nitelenen puan degil
164 163 kötü
çekimlerinde
görüntü 3 0
177 175 kötü mesaj sesi 3 0
891 889 güzel ve görünüşü 3 0
185 186 güzel telefon 1 0
203 204 güzel ve 1 0
211 212 yeter şarkı 1 0
484 485 iyi telefon 1 0
562 563 çok memnunum 1 0
Bu adımların sonucunda Şekil 2.’deki gibi bir özet bilgi
tablosu elde edilmektedir. Burada belirtilen değerlerden
“batarya” özelliği açıklanmak istenirse değerlendirilen
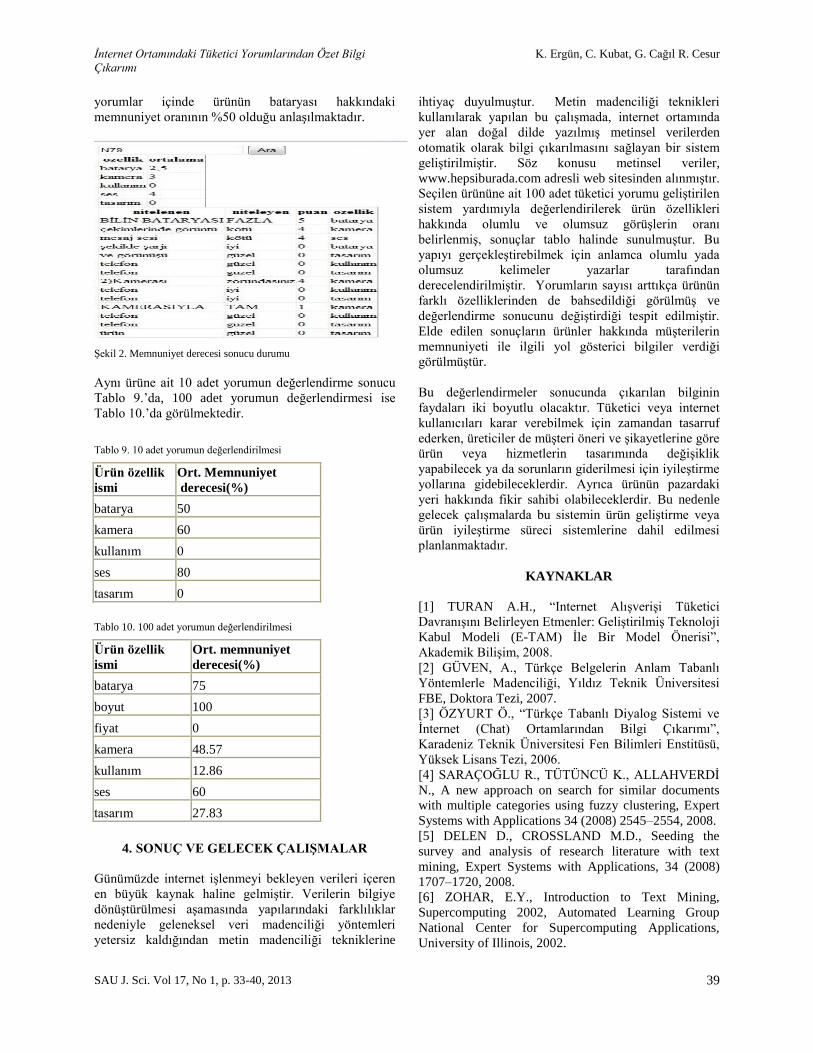
İnternet Ortamındaki Tüketici Yorumlarından Özet Bilgi
Çıkarımı
K. Ergün, C. Kubat, G. Cağıl R. Cesur
SAU J. Sci. Vol 17, No 1, p. 33-40, 2013 39
yorumlar içinde ürünün bataryası hakkındaki
memnuniyet oranının %50 olduğu anlaşılmaktadır.
Şekil 2. Memnuniyet derecesi sonucu durumu
Aynı ürüne ait 10 adet yorumun değerlendirme sonucu
Tablo 9.’da, 100 adet yorumun değerlendirmesi ise
Tablo 10.’da görülmektedir.
Tablo 9. 10 adet yorumun değerlendirilmesi
Ürün özellik
ismi
Ort. Memnuniyet
derecesi(%)
batarya 50
kamera 60
kullanım 0
ses 80
tasarım 0
Tablo 10. 100 adet yorumun değerlendirilmesi
Ürün özellik
ismi
Ort. memnuniyet
derecesi(%)
batarya 75
boyut 100
fiyat 0
kamera 48.57
kullanım 12.86
ses 60
tasarım 27.83
4. SONUÇ VE GELECEK ÇALIŞMALAR
Günümüzde internet işlenmeyi bekleyen verileri içeren
en büyük kaynak haline gelmiştir. Verilerin bilgiye
dönüştürülmesi aşamasında yapılarındaki farklılıklar
nedeniyle geleneksel veri madenciliği yöntemleri
yetersiz kaldığından metin madenciliği tekniklerine
ihtiyaç duyulmuştur. Metin madenciliği teknikleri
kullanılarak yapılan bu çalışmada, internet ortamında
yer alan doğal dilde yazılmış metinsel verilerden
otomatik olarak bilgi çıkarılmasını sağlayan bir sistem
geliştirilmiştir. Söz konusu metinsel veriler,
www.hepsiburada.com adresli web sitesinden alınmıştır.
Seçilen ürününe ait 100 adet tüketici yorumu geliştirilen
sistem yardımıyla değerlendirilerek ürün özellikleri
hakkında olumlu ve olumsuz görüşlerin oranı
belirlenmiş, sonuçlar tablo halinde sunulmuştur. Bu
yapıyı gerçekleştirebilmek için anlamca olumlu yada
olumsuz kelimeler yazarlar tarafından
derecelendirilmiştir. Yorumların sayısı arttıkça ürünün
farklı özelliklerinden de bahsedildiği görülmüş ve
değerlendirme sonucunu değiştirdiği tespit edilmiştir.
Elde edilen sonuçların ürünler hakkında müşterilerin
memnuniyeti ile ilgili yol gösterici bilgiler verdiği
görülmüştür.
Bu değerlendirmeler sonucunda çıkarılan bilginin
faydaları iki boyutlu olacaktır. Tüketici veya internet
kullanıcıları karar verebilmek için zamandan tasarruf
ederken, üreticiler de müşteri öneri ve şikayetlerine göre
ürün veya hizmetlerin tasarımında değişiklik
yapabilecek ya da sorunların giderilmesi için iyileştirme
yollarına gidebileceklerdir. Ayrıca ürünün pazardaki
yeri hakkında fikir sahibi olabileceklerdir. Bu nedenle
gelecek çalışmalarda bu sistemin ürün geliştirme veya
ürün iyileştirme süreci sistemlerine dahil edilmesi
planlanmaktadır.
KAYNAKLAR
[1] TURAN A.H., “Internet Alışverişi Tüketici
Davranışını Belirleyen Etmenler: Geliştirilmiş Teknoloji
Kabul Modeli (E-TAM) İle Bir Model Önerisi”,
Akademik Bilişim, 2008.
[2] GÜVEN, A., Türkçe Belgelerin Anlam Tabanlı
Yöntemlerle Madenciliği, Yıldız Teknik Üniversitesi
FBE, Doktora Tezi, 2007.
[3] ÖZYURT Ö., “Türkçe Tabanlı Diyalog Sistemi ve
İnternet (Chat) Ortamlarından Bilgi Çıkarımı”,
Karadeniz Teknik Üniversitesi Fen Bilimleri Enstitüsü,
Yüksek Lisans Tezi, 2006.
[4] SARAÇOĞLU R., TÜTÜNCÜ K., ALLAHVERDİ
N., A new approach on search for similar documents
with multiple categories using fuzzy clustering, Expert
Systems with Applications 34 (2008) 2545–2554, 2008.
[5] DELEN D., CROSSLAND M.D., Seeding the
survey and analysis of research literature with text
mining, Expert Systems with Applications, 34 (2008)
1707–1720, 2008.
[6] ZOHAR, E.Y., Introduction to Text Mining,
Supercomputing 2002, Automated Learning Group
National Center for Supercomputing Applications,
University of Illinois, 2002.

K. Ergün, C. Kubat, G. Cağıl R. Cesur İnternet Ortamındaki Tüketici Yorumlarından Özet Bilgi
Çıkarımı
40 SAU J. Sci. Vol 17, No 1, p. 33-40, 2013
[7] TÜRKEEŞ, M.K., Bilgi Erişiminde Tamlama
Temelli Dizinleme, İstanbul Teknik Üniversitesi FBE,
Yüksek Lisans Tezi, 2007.
[8] DAŞ, R., Web Kullanıcı Erişim Kütüklerinden Bilgi
Çıkarımı, Fırat Üniversitesi FBE, Doktora Tezi, 2008.
[9] BAYKAL A., ÇOŞKUN C., Web Madenciliği
Teknikleri, Akademik Bilişim, 2009.
[10] ÖZKAN, Y., Veri Madenciliği Yöntemleri,
Papatya Yayıncılık, İstanbul, 2008.
[11] OĞUZLAR, A., Temel Metin Madenciliği, Dora
Yayınları, Bursa, 2011.
[12] http://www.ii.metu.edu.tr/tr/category/tags/turkce-
derlem
[13] CEBİROĞLU, G., Sözlüksüz Köke Ulaşma
Yöntemi, Yüksek Lisans Tezi, İ.T.Ü. Fen Bilimleri
Enstitüsü, 2002.
[14] BENZER, A.İ., Yapay Zeka Uygulamalarında
Kullanılan Arama Algoritmalarının Kıyaslanması, Gazi
Üniversitesi Bilişim Enstitüsü, Yüksek Lisans Tezi,
2007.

SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 41-51, 2013 SAU J. Sci. Vol 17, No 1, p. 41-51, 2013
41
Çalışma duruşu analiz yöntemleri ve çalışma duruşunun kas-iskelet sistemi
rahatsızlıklarına etkileri
Hatice ESEN1*, Nilgün FIĞLALI1
1Kocaeli Üniversitesi, Mühendislik Fakültesi, Endüstri Mühendisliği Bölümü, Kocaeli
18.09.2012 Geliş/Received, 23.12.2012 Kabul/Accepted
ÖZET
Büyük sağlık problemlerine ve sosyal kaynak tüketimine neden olan Kas-İskelet Sistemi Rahatsızlıkları (KİSR),
çalışan nüfusu yaygın olarak etkileyen olumsuzluklardandır. Yaşanan sağlık problemleri, bu rahatsızlıklar için yapılan
harcamalar sıralamasında üst sıralarda yer alan ve çalışanı iş verimi, yaşam kalitesi, fiziksel ve sosyal fonksiyonlar
açısından olumsuz etkileyen KİSR önemli oranda, uygun olmayan çalışma duruşlarından kaynaklanmaktadır. Çalışma
duruşlarını bilimsel yöntemler ile incelemek, analiz etmek ve gerekli iyileştirme ve düzenlemeleri yapmak çalışma
performansının kontrol edilmesi ve KİSR’nin azaltılması konularında önemli katkılar sağlamaktadır. Bu çalışmada,
KİSR’nin ortaya çıkmasına neden olan risk faktörleri, rahatsızlık çeşitleri ve belirtileri özetlenmekte, bu rahatsızlıkları
önlemek için kullanılabilecek ana ilkeler sunulmakta ve risk faktörlerinin tespit edilmesinde kullanılan bilimsel
yöntemler sınıflandırılarak tanıtılmaktadır.
Anahtar Kelimeler: Ergonomi, Çalışma Duruşu Analizi, Kas-İskelet Sistemi Rahatsızlıkları
Working posture analysis methods and the effects of working posture on
musculoskeletal disorders
ABSTRACT
Musculoskeletal Disorders (MSDs) which cause great health problems and social resource consumption are common
problems which commonly influence working population. MSDs which is at the top of the list in the sense of health
problems, expenses made for these disorders and which has negative influences in the sense of employee labor
efficiency, quality of life, physical and social functions results from poor working postures. Observation, analysis of
working postures with scientific methods, and making necessary recoveries and arrangements bring important
contributions for control of working performance and decrease of MSDs. İn this study, risk factors which cause the
emergence of MSDs, types and symptoms of disorders are summarized, basic principles to be used in preventing these
disorders are presented and scientific methods used in determination of risk factors are classified and presented.
Keywords: Ergonomics, Working Posture Analysis, Musculoskeletal Disorders
* Sorumlu Yazar / Corresponding Author

H. Esen, N. Fığlalı Çalışma Duruşu Analiz Yöntemleri Ve Çalışma Duruşunun
Kas-İskelet Sistemi Rahatsızlıklarına Etkileri
42 SAU J. Sci. Vol 17, No 1, p. 41-51, 2013
1. GİRİŞ
İnsanin çalişmasi sirasindaki vücut duruşu ve
hareketlerinin doğruluğu, iş yaşamini ne kadar sağlikli ve
başarili geçirebileceği ile ilgili bir gösterge
oluşturmaktadir. Uygun ve doğru olmayan vücut duruş
ve hareketlerinin tekrarli olarak icra edilmesi neticesinde
KİSR ortaya çikmakta ve hem çalişan, hem işveren hem
de devlet açisindan, maddi ve manevi, ciddi kayiplara
neden olmaktadir.
Hem çalişma hayati boyunca sağliğini koruyarak
çalişanin moralini, motivasyonunu ve performansini
arttirabilmek hem de ülke endüstrisine ve ekonomisine
katkida bulunabilmek açisindan önemli bir yere sahip
olan KİSR’nin önlenmesi konusu; bilimsel yöntemler ile
incelenmesi ve analiz edilmesi gereken bir alan olarak
karşimiza çikmaktadir. KİSR’ye neden olan uygunsuz
çalişma duruşlarini ve bunlarin risk düzeylerini
belirleyebilmek ve bu konularda yapilacak iyileştirme ve
geliştirme planlarina işik tutmak amaciyla literatürde
birçok yöntem yer almaktadir.
Bu çalişma kapsaminda, KİSR’nin ortaya çikmasina
neden olan risk faktörleri, rahatsizlik çeşitleri ve
belirtileri özetlenmekte, bu rahatsizliklari önlemek için
kullanilabilecek ana ilkeler sunulmakta ve KİSR'ye
neden olan, farkli iş gruplarinda ve vücut bölümlerinde
rastlanan farkli çalişma duruşlarina ait risk düzeylerinin
belirlenmesinde kullanilan bilimsel yöntemler
siniflandirilarak tanitilmaktadir. Çalişmada ayrica
KİSR'nin dünyadaki ve ülkemizdeki görülme sikliklari
ile ilgili detayli bilgi verilerek sebep olduğu maliyetlere
değinilmektedir.
2. KAS-İSKELET SİSTEMİ
RAHATSİZLİKLARİ
Kas-İskelet Sistemi Rahatsizliklari (KİSR) Uluslararasi
İş Sağliği ve Güvenliği Komisyonu’nun da tanimladiği
gibi kas-iskelet sisteminde oluşan ve işten kaynaklanan
rahatsizliklar veya hastaliklardir. “İşten kaynaklanan”
terimi Dünya Sağlik Örgütü tarafindan iş performansi ve
iş çevresi gibi iki faktörün etkisiyle başlayan çok etkenli
bir hastaliğin bilimsel nedenini tanimlamak için
kullanilmaktadir [1].
Çalişma hayatinda KİSR; tendon, kas, sinir ve diğer
yumuşak dokularda hasara sebep olan bükme,
gerginleştirme, kavrama, tutma, döndürme, sikiştirma ve
uzanma gibi tekrarlayici fiziksel hareketler nedeniyle
oluşmaktadir [2]. Günlük yaşamin olağan
aktivitelerindeki bu yaygin hareketler zararli hareketler
değildir. Bu hareketleri zararli hale getiren hareketlerin
araliksiz tekrarlari, hizi ve toparlanma için iki hareket
arasindaki zaman yetersizliğidir [3].
KİSR’nin gelişmesinde fiziksel ve psikososyal
faktörlerin önemli rol oynadiği konusunda bilimsel
çalişmalar bulunmaktadir. KİSR’ye sebep olan bu risk
faktörleri aşağidaki gibi siniflandirilabilmektedir:
Vücut pozisyonu: Boynun ve omuzlarin sabit pozisyonda
olmasi kas iskelet sistemi rahatsizliklarinin oluşmasinda
etkili olan bir durumdur. Üst uzuvlarin kontrollü
hareketleri esnasinda çalişanlarin omuz-boyun
bölgesinin dengesini sağlamalari gerekmektedir. Omuz
ve boyundaki kaslar kasilmakta ve görevin gerektirdiği
süre boyunca sabit pozisyonda durabilmek için
kasilmaya devam etmektedir. Kasilan kaslar damarlari
sikiştirmakta bu da rahatsizliklara sebep olmaktadir.
Çalişma istasyonlarinin düzensiz yerleşimi ve uygun
olmayan araç ve ekipman seçimi de bu riskli vücut
hareketlerinin oluşmasinda etkilidir
Tekrar: Çalişanlarin yaptiği çok sayida tekrar içeren
görevler kas iskelet rahatsizliklari için büyük risk
oluşturmaktadir. Bu görevler genellikle sabit vücut
pozisyonu ve güç gibi diğer risk faktörlerini de içeren
tekrarli hareketlerdir. Bilek, dirsek ve omuz eklemlerinin
kabul edilebilir limitler dişindaki tekrarli hareketlerini
içeren görevler, bu bölgelerde ağrilarin oluşmasina sebep
olmaktadir. Tablo 1’de bu tür hareketlerin örnekleri yer
almaktadir.
Tablo 1: Vücut Hareketleri ve Etkiledikleri Bölgeler [3]
Vücut Hareketi Ağri
Bölgesi
Kabul edilebilir limitler dişinda bileğin
tekrarli, yatay veya düşey hareketleri Avuç içi
ve Bilek Bileğin kabul edilebilir limitler
dişindaki pozisyonlarinda parmaklarin
hareketi
Dirseğin nötral pozisyonundan tekrarli
olarak bükülmesi ve düzleştirilmesi Dirsek
Önkol ve bileğin döndürülmesi
Omuz seviyesinin yukarisina uzanma
Omuz ve
Boyun
Gövdenin arkasina uzanma
Vücudun önünde uzağa uzanmak
Kolun döndürülmesi
Mola vermeden uzun süre çalişma: Üst üste tekrarli
hareketleri içeren işler yorucu olmaktadir. Bundan dolayi
çalişan, görevler arasinda verilen kisa molalarda tam
anlamiyla dinlenememektedir. Tekrarli hareketler
minimum güç gerektirse bile bu hareketlerin zaman
içinde sürdürülmesi için gerekli çaba düzenli olarak
artmaktadir. Çalişma aktivitesine artan yorgunluğa
rağmen mola verilmeden devam edilmesi durumunda
incinmeler meydana gelmektedir.
Çalışma Duruşu Analiz Yöntemleri Ve Çalışma Duruşunun
Kas-İskelet Sistemi Rahatsızlıklarına Etkileri
H. Esen, N. Fığlalı
SAU J. Sci. Vol 17, No 1, p. 41-51, 2013 43
Güç: Elle ağir iş yapma, kaldirma, taşima vb. görevleri
yerine getirmek için gerekli olan güç kas iskelet sistemi
rahatsizliklarinin başlangicinda önemli bir rol
oynamaktadir. Daha fazla güç daha fazla çabaya eşit
olduğundan görevler arasinda dinlenmek için daha uzun
zamana ihtiyaç duyulmaktadir. Tekrarli hareketler içeren
işlerde dinlenmek için yeterli zaman olmadiğinda daha
fazla güç gerektiren hareketler yorgunluğun ve
rahatsizliklarin daha çabuk ortaya çikmasina sebep
olmaktadir.
İşin hizi: Yapilan işin hizi, görevdeki çevrimler arasinda
verilmesi gereken mola zamanini tespit etmekte
belirleyici olmaktadir. İşin yüksek hizlarda yapilmasi
durumunda dinlenmek için daha az zaman kalmakta bu
da stres düzeyini arttirmaktadir. Stres düzeyinin artmasi
ile ortaya çikan kas gerginliği de yorgunluğa sebep olarak
kas iskelet sistemi rahatsizliklarina temel
oluşturmaktadir.
Çalişma ortaminin isisi: Sicaklik ve nem tekrarli işlerde
çalişan performansini etkilemektedir. Eğer çalişma
ortami çok sicak ve çok nemli ise çalişanlar daha çabuk
yorulmakta ve bunun sonucunda da incinmelere daha
duyarli olmaktadirlar. Diğer taraftan düşük sicakliklarda
ise kas ve eklem esnekliği azalmakta bu da incinme
olasiliğini arttirmaktadir.
Tireşim: Tireşim; tendon, kas, eklem ve sinirleri
etkilemektedir. Çalişanlar titreşimli araçlar
kullandiklarinda parmaklarinda uyuşukluk, dokunma ve
kavrama kaybi ve ağri ile karşi karşiya kalmaktadirlar
[3].
Ayrica iş organizasyonunun yetersizliği, yüksek iş
talebi, iş üzerindeki kontrolün azliği, düşük iş
memnuniyeti, zaman baskisi, çalişma arkadaşi ve
yöneticilerden destek görememek, stres, mola vermeden
uzun süre çalişma da KİSR için işyerinde risk oluşturan
diğer faktörlerdir [2], [4].
İşyerindeki risk faktörlerinin yaninda fiziksel kapasite,
yaş, kondisyon yetersizliği, aşiri kilo alimi ve sigara
kullanimi gibi kişisel faktörler de KİSR oluşumda
etkilidir [4], [5].
Bu risk faktörlerinin hiçbiri tek başina kas iskelet sistemi
rahatsizliklarina sebep olmamaktadir. Kas iskelet sistemi
rahatsizliklari genellikle bu faktörlerin kombinasyonu ve
etkileşimi sonucunda meydana gelmektedir. Sayilan bu
risk faktörlerine maruz kalma sonucunda çalişanin
vücudunda kan akiminda azalma veya lokal kas
yorgunluğu gibi etkiler oluşmaktadir. Eğer uygun
dinlenme araliklari verilmez ve bu faktörlere sürekli
maruz kalinirsa kas iskelet sistemi rahatsizliklari
oluşmaktadir [3].
Yukarida sayilan risk faktörleri de dikkate alindiğinda
çiftçilik, ormancilik, balikçilik, madencilik, üretim ve
makine operatörlüğü, terzilik, yükleme ve boşaltma
işçiliği, inşaat işçiliği, bahçivanlik, şoförlük, hemşirelik,
temizlik işçiliği, perakende satiş işçiliği, otel ve restoran
işçiliği,sekreterlik KİSR’nin sik görüldüğü iş gruplaridir
[4].
KİSR; bel, boyun ve üst ekstremite (el bileği, el, dirsek
ve omuz) hastaliklari olarak siniflandirilmaktadir. [2].
Bel ve sirt ağrilari, kas zorlanmasi ve incinmesi, boyun
tutulmasi, boyun fitiği, bel fitiği, karpal tünel sendromu,
gergin boyun sendromu ve kas kuvveti dengesizlikleri
işten kaynaklanan başlica kas iskelet sistemi
rahatsizliklaridir [2], [6]. KİSR’de en sik tutulan bölgeler
bel, boyun, eller, el bilekleri, dirsekler ve omuzlardir [5].
Ağri, kas iskelet sistemi rahatsizliklarinda görülen en
yaygin semptomdur. Bazi durumlarda eklem sertliği, kas
gerginliği, kizariklik ve etkilenen bölgenin şişmesi gibi
semptomlara da rastlanmaktadir. Bazi çalişanlar
karincalanma duygusu, hissizlik, cilt renginde değişme
ve ellerin terlemesinde artiş yaşamaktadirlar. Tablo 2, üst
vücut bölgelerinde görülen bazi kas iskelet sistemi
rahatsizliklardaki mesleki risk faktörlerini ve
semptomlari göstermektedir.
KİSR’nin da içinde yer aldiği kronik hastaliklarin önemli
bir halk sağliği sorunu olmasinin temel nedeni
mortalitelerinin yüksek olmasindan ziyade, iş gücü
kaybina yol açmalari, kişinin yaşam kalitesini bozmalari
ve prevalanslarinin yüksek olmasidir. Bu faktörler
açisindan KİSR tüm dünyada morbiditenin önde gelen
nedenleri arasinda yer almaktadir ve hem kişiye, hem
topluma önemli olumsuz etkileri bulunmaktadir.
Özellikle kişinin yaşam kalitesini ve iş verimini
etkilemekte, sakatliklara yol açmakta ve sağlik sistemine
büyük ölçüde yük getirmektedir.

H. Esen, N. Fığlalı Çalışma Duruşu Analiz Yöntemleri Ve Çalışma Duruşunun
Kas-İskelet Sistemi Rahatsızlıklarına Etkileri
44 SAU J. Sci. Vol 17, No 1, p. 41-51, 2013
Tablo 2: Rahatsizliklara ait Mesleki Risk Faktörleri ve Semptomlar
[3]
Rahatsizlik Mesleki Risk
Faktörü Semptomlar
Tendon
İltihabi
Tekrarli bilek
hareketi
Tekrarli omuz
hareketi
Omuzlara uzun
süreli yüklenme
Ağri, güçsüzlük,
şişme, etkilenen
bölgenin
üzerinde yanma
hissi ve aci
Epikondilit
(Dirsek
Tendonu
İltihabi)
Önkolun zorlayici
veya tekrarli
rotasyonu
esnasinda bileğin
bükülmesi
Ağri, güçsüzlük,
şişme, etkilenen
bölgenin
üzerinde yanma
hissi ve aci
Karpal
Tünel
Sendromu
Tekrarli bilek
hareketleri
Ağri, hissizlik,
karincalanma,
yanma hissi,
avuç içinin
kurumasi,
Baş Parmak
Tendon
Sikişmasi
Tekrarli olarak
elin bükülmesi ve
güç sarf ederek
kavrama
Baş parmak
tabaninda ağri
Torasik
Outlet
Sendromu
Omuzlarin sürekli
bükülmesi
Omuz üzerinde
yük taşima
Kollarin omuz
hizasinin üzerine
uzanmasi
Ağri, hissizlik,
ellerde şişme
Gergin
Boyun
Sendromu
Kisitli vücut
duruşunda uzun
süreli bulunma
Ağri
Dünya ölçeğinde saptanan tüm KİSR’nin yaklaşik
%30’unun işe bağli olduğu belirtilmektedir. KİSR,
meslek hastaliklari ve iş kazalarinin neden olduğu tüm
işgünü kayiplarinin yaklaşik %34’ünü oluşturmaktadir
[7]. AB’de 46 bin kişiyle yapilan çalişmada
katilimcilarin %24’ünün sirt ağrisindan ve %22’sinin kas
ağrisindan yakindiği, ağrilarin en yaygin nedeninin %34
ile osteoartrit olduğu bildirilmiştir. Almanya’da KİSR
nedeniyle oluşan kayip gün sayisi, hastalik nedeniyle
kaybedilen tüm çalişma günlerinin nerdeyse % 30’una
karşilik gelirken Hollanda’da bu oran % 46’dir.
İngiltere’de her yil işle ilgili KİSR nedeniyle yaklaşik 10
milyon iş günü kaybedilmekte ve bunlarin, yaklaşik
%50’si sirt şikayetleri, %30’u boyun ve kollarla ilgili
şikayetler ve %20’si de bacaklarda görülen şikayetler
nedeniyle yitirilmektedir [8]. Avustralya’da yapilan
çalişmalarda ise osteoartrit erkeklerde %3,9 ile 9. sirada,
kadinlarda %5,7 ile 3. sirada yer almaktadir. ABD’de
meslek hastaliklarinin %42 gibi büyük bir oranini kas-
iskelet sistemi rahatsizliklari oluşturmakta [6], 45 yaş
üzeri 40 milyondan fazla insani etkilediği ve 2030 yilinda
nüfusun %22’sini etkileyeceği tahmin edilmektedir [9].
Türkiye’de Hacettepe Üniversitesi Sağlik Kontrolü
Ünitesi’nin 2003 Yili Sağlik Merkezleri Çalişma
Raporu’na göre; 40 – 65 yaş arasi akademik ve idari
personele uygulanan “Periyodik Sağlik Kontrolü”
sonuçlarina göre KİSR %13,5 ile ikinci sirada yer
almaktadir. Çimento fabrikasinda çalişan işçilerin sağlik
sorunlarinin belirlenmesi amaciyla yapilan çalişmada da
KİSR %16,3 ile üçüncü sirada bildirilmektedir [10].
Gelişmiş ülkelerde işe bağli KİSR sikliğinin ve
maliyetinin hizla artişi nedeniyle, risk etkenleri, iş günü
kaybi ve maliyeti konusunda çalişmalar son yillarda hiz
kazanmaktadir. Gelişmekte olan ülkelerde ise, travma ve
aşiri yüklenme, ağir ve ergonomik olmayan çalişma
koşullarinin yayginliği bilinmekte olup, KİSR’nin işe
bağli olup olmadiğinin tanisinda büyük güçlükler
yaşandiği gözlenmektedir.
KİSR’nin maliyeti üç grupta incelenmektedir: Bunlar
direk, dolayli ve görünmeyen maliyetlerdir. Direk
maliyetler: hekim muayenesi, tani testleri, ilaç kullanimi,
hastane yatişi gibi tibbi bakim maliyetlerini içermektedir.
ABD’de 1995 yilinda KİSR’ye bağli olarak ortaya çikan
215 milyar dolarlik maliyetin %37’sini de direk
maliyetler oluşturmaktadir. Dolayli maliyetler ise iş gücü
kayiplari ve aktivitelerdeki azalmanin maliyetini
göstermekte ve toplam maliyetin %52’si civarinda
olduğu bildirilmektedir. Görünmeyen maliyetler ise;
yaşam kalitesinin, fiziksel ve sosyal fonksiyonun
azalmasi olarak ifade edilmektedir [9].
İngiltere’de yapilan benzer bir çalişmada ise KİSR’nin
tibbi maliyetinin 84 milyon ile 254 milyon sterlin
arasinda olduğu tahmin edilmektedir. İşle ilgili sirt
problemlerinin maliyetinin 43 milyon ile 127 milyon
sterlin arasinda, kollarda ve boyunda görülen
rahatsizliklarin maliyetinin 32 milyon ile 104 milyon
sterlin arasinda ve alt uzuvlarda görülen işle ilgili
hastaliklarin maliyetinin de 17 milyon ile 55 milyon
sterlin arasinda olduğu düşünülmektedir [8].
Yaşanan sağlik problemleri, bu rahatsizliklar için yapilan
harcamalar siralamasinda üst siralarda yer alan ve
çalişani iş verimi, yaşam kalitesi, fiziksel ve sosyal
fonksiyonlar açisindan olumsuz etkileyen KİSR önemle
ele alinmasi gereken bir konudur.
Çalışma Duruşu Analiz Yöntemleri Ve Çalışma Duruşunun
Kas-İskelet Sistemi Rahatsızlıklarına Etkileri
H. Esen, N. Fığlalı
SAU J. Sci. Vol 17, No 1, p. 41-51, 2013 45
3. KİSR’NİN ÖNLENMESİNDE
UYGULANABİLECEK ANA İLKELER VE
BİLİMSEL YÖNTEMLER
Literatürde KİSR’nin oluşmasini önlemek amaciyla
uygun çalişma ortamlarinin tasarlanmasi ve ihtiyaç
duyulan iyileştirmelerin yapilmasinda yararlanilabilecek
ana ilkeler ve KİSR’ye sebep olan uygunsuz çalişma
duruşlarina ait risk düzeylerinin belirlenmesinde
kullanilan bilimsel yöntemler yer almaktadir. Çalişmanin
bu bölümünde hem ana ilkelere değinilmekte hem de
bilimsel yöntemler siniflandirilarak tanitilmaktadir.
3.1. Çalişma Ortamlarinin Tasarimi ve Etkin
Kullaniminda Dikkate Alinmasi Gereken Ana İlkeler
Risklerin kaynağinda yok edilmesi mesleki sağlik ve
güvenlik prensiplerinin temelini oluşturmaktadir.
KİSR’de en önemli risk kaynağini işlerin gereksiz
tekrarlari oluşturmaktadir. Uygulanan güç, sabit vücut
pozisyonlari, benzer hareketlerin defalarca tekrarini
gerektiren iş adimlari da KİSR’ye sebep olan
faktörlerdir. Çalişanlari bu rahatsizliklardan
koruyabilmek için alinacak önlemlerin amaci, uygun iş
tasarimi araciliğiyla işteki tekrarlarin azaltilmasi
olmalidir. İş tasarimlari; makineleştirme, iş rotasyonu, iş
zenginleştirme veya takim çalişmasi dikkate alinarak
yapilabilmektedir.
İş rotasyonu ile çalişanin farkli görevler yapmasi farkli
kas gruplarini çaliştirmasini sağlamaktadir. İş
zenginleştirme ile de işteki görevlerin çeşitliliği artmakta
bu da işteki monotonluğu ortadan kaldirarak vücudun
belli bölgelerindeki aşiri yüklenmeyi azaltmaktadir.
Takim çalişmasi kassal çalişmalarin dengeli bir şekilde
dağilimini ve çalişanlar arasindaki görev değişimleri
araciliğiyla çeşitlilik sağlamaktadir.
Uygun iş tasarimlari ile işteki tekrarlarin azaltilamamasi
durumunda ise işyeri düzenleme, kullanilan araç ve
ekipmanlarin tasarimi ve uygun iş çalişmalari gibi
önleyici stratejiler dikkate alinmalidir.
İş yeri tasarimindaki amaç çalişma yerinin çalişana
uygun hale getirilmesidir. Çalişma yerlerinin
değerlendirilmesi sonucunda KİSR’nin kaynaklari
belirlenebilmektedir. İş istasyonlarinin uygun tasarimi,
çalişma pozisyonu için gerekli olan gücün azaltilmasini
sağlamaktadir. İş istasyonlari; çalişana oturma veya
ayakta durma pozisyonlari için seçenekler sağlamali,
çalişanin vücut ölçülerine ve şekline uygun ve
ayarlanabilir olmalidir.
Araç ve ekipmanin uygun tasarimi görevi tamamlamak
için gerekli olan gücü önemli ölçüde azaltmaktadir.
Çalişanlara, görevleri için uygun bağlama düzenleri ve
şablonlarin sağlanmasi uygunsuz pozisyonlardaki kassal
çabayi azaltmaktadir.
İyi tasarlanmiş çalişma alani ve uygun araçlar ile
desteklenmiş bir iş çalişana gereksiz boyun, omuzlar ve
üst uzuv hareketlerinden korunabilmesini sağlamaktadir.
Tekrarli görevler içeren işleri yapan çalişanlar için eğitim
verilmelidir. Çalişanlarin, görev ve bireysel ihtiyaçlarina
göre iş istasyonlarini nasil ayarlayabileceklerini bilmeleri
gerekmektedir. Çalişanlara verilecek eğitimler, kaslari
rahatlatmak için görevler arasinda verilecek kisa süreli
molalarin ve dinlenme zamanlarinin önemini
vurgulayarak avantajlarini öğretmelidir. Eğitimlerde
ayrica çalişanlara bütün vardiya boyunca oluşabilecek
kas gerginliğini bilinçli bir şekilde nasil kontrol altina
alinabileceklerine dair bilgiler verilmelidir [3].
3.2. Çalişma Duruşu Analizinde Kullanilan Bilimsel
Yöntemler
KİSR’ye sebep olan uygun olmayan çalişma duruşlarini
bilimsel yöntemler ile incelemek, analiz etmek ve gerekli
iyileştirme ve düzenlemeleri yapmak çalişma
performansinin etkili bir şekilde kontrol edilmesi ve
KİSR’nin azaltilmasi konularinda önemli katkilar
sağlamaktadir. KİSR’ye neden olan uygunsuz çalişma
duruşlarini ve bunlarin risk düzeylerini belirleyebilmek
ve bu konularda yapilacak iyileştirme ve geliştirme
planlarina işik tutmak amaciyla literatürde de birçok
yöntem yer almaktadir.
Çalişma sirasinda hangi duruşlarin çalişan sağliği
açisindan daha riskli olduğunun belirlenmesi
Ergonominin önemli bir alanidir [11]. Zaman zaman
çalişanlar; antropometrik karakteristikler dikkate
alinmadan tasarlanmiş iş istasyonlarinda ve/veya
ergonomik prensipler doğrultusunda tasarlanmamiş
görevleri yerine getirmek üzere uygun olmayan vücut
duruşlari ile çalişmak zorunda kalmaktadirlar [12].
Çalişma duruşlarinin uygunluğu, çalişma performansinin
etkili bir şekilde kontrol edilmesini ve KİSR’nin
azaltilmasini sağlamaktadir [13].
En genel tanimiyla duruş; “vücudun, başin, gövdenin, kol
ve bacak bölümlerinin hareket esnasindaki konumlari”
olarak tanimlanmaktadir. Çalişma duruşu ise bu tanima
bağli olarak, vücudun, başin, gövdenin, kol ve bacaklarin
yapilan işe ve işin özelliklerine göre konumlanmasi
şeklinde tanimlanmaktadir [14]. Uygun olmayan
duruşlar ise bir veya birden fazla uzvun, hareketsiz vücut
duruşundan sapmasi olarak tanimlanmaktadir [15]. İyi
bir çalişma duruşunun önemi 18.yy’in başlarinda
Ramazzini’nin düzensiz ve tekrarli çalişma
hareketlerinin ve doğal olmayan vücut duruşlarinin,
çalişanlar için nasil zararli sonuçlar doğurduğunu
açiklamasiyla anlaşilmiştir. Bu çalişma ayrica çeşitli

H. Esen, N. Fığlalı Çalışma Duruşu Analiz Yöntemleri Ve Çalışma Duruşunun
Kas-İskelet Sistemi Rahatsızlıklarına Etkileri
46 SAU J. Sci. Vol 17, No 1, p. 41-51, 2013
KİSR’nin, yüksek oranda durağan görevler yapan
operatörlerde ortaya çiktiğini ve bunlarin uzun dönemde
ciddi rahatsizliklara sebep olacağini da belirtmektedir.
Çalişma sirasinda duyulan rahatsizliğin minimize
edilmesi, sağlikli ve güvenli bir çalişma ortami
tasarlanmasi, işin performans değeri kadar önemlidir.
Eğer duruş doğru değilse, bu operatöre yük, yorgunluk
ve ağri olarak geri dönmektedir. Çalişan kaslar kendini
yenileyene kadar çalişmasina ara vermek zorunda
kalmaktadir. Uygun olmayan çalişma duruşlarini
endüstride önemli kilan faktörler KİSR ve bu
rahatsizliklarin verimliliğe, kaliteye ve maliyete
yansimalaridir [16].
Verimlilik, kalite ve maliyet açisindan çeşitli kayiplara
sebep olan KİSR’nin azaltilabilmesi çalişma duruşlarinin
değişik bakiş açilarinda ele alinarak farkli yönlerinin
detayli bir şekilde analiz edilmesi ile mümkündür.
Literatürde bu amaçla kullanilan yöntemleri aşağidaki
gibi siniflandirmak mümkündür:
3.2.1 Yük Kaldirma İle İlgili Olan Yöntemler
Snook’un Tablolari (Snook’s Tables): Snook ve Ciriello
(1991) tarafindan geliştirilen yöntem Snook adi verilen
tablolar yardimiyla maksimum kabul edilebilir yük
ağirliklarini belirlemeye çalişmaktadir. Bu yöntemin
amaci, elle gerçekleştirilen yük kaldirma işleri için
güvenilir kaldirma limitlerini belirlemektir. Yöntem
çalişanlardan, kişisel algilamalarina göre ağirliği,
gerilme ve yorgunluğu belirlemelerini istemektedir.
Literatürde yöntemin; ambulans hizmeti, yemek
dağitimi, çamaşirhane, ev temizliği, hasta bakimi, kargo,
çöp toplama, bakim evleri gibi elle gerçekleştirilen
kaldirma işleri için uygulandiği görülmektedir [17]
Revize Edilmiş NİOSH Kaldirma Eşitliğ: ABD Ulusal
Mesleki Sağlik ve Güvenlik Enstitüsü tarafindan bir seri
değerin (yükün kaldirilmasi esnasinda kaldirmanin
başlangiç ve bitiş yüksekliği, yükün dikey kaldirilma
mesafesi, uzanma mesafesi, açisal yer değiştirme,
kaldirma sikliği, tutma şekli katsayisi) çarpilarak elde
edildiği ‘Önerilen Ağirlik Limiti’ni belirleyen
matematiksel bir eşitlik geliştirilmiştir. Bu eşitlik yük
kaldirma ve indirme işlemi içeren görevlerde, belde
oluşan zorlanmayi belirlemek amaciyla kullanilmaktadir.
Kaldirilan yükün önerilen ağirlik limitine bölümü ile elde
edilen Kaldirma İndeksi farkli görevler için
hesaplanabilmekte ve bu indeks yardimiyla hangi
kaldirma görevlerinin problemli olduğu
belirlenebilmektedir [18].
İndirme, İtme, Çekme ve Taşima Modeli (Lowering,
Pushing, Pulling and Carrying Model): Bu yöntemde
biyomekanik, fizyolojik ve psikofiziksel kriterleri
dikkate alan denklemler araciliğiyla indirme, itme,
çekme ve taşima için kapasiteler hesaplanmaktadir [19].
Yöntemin, eczacilarin ve kalfalarin ilaçlarin bulunduğu
soğuk depolardan girerken kapilari çekmesi,
hemşirelerin, hemşire yardimcilarinin ve hastabakicilarin
hastalari indirmesi, temizlik personelinin çöpleri
taşimasi, depo işçilerinin tibbi malzeme kutularini
taşimasi, çamaşirhane işçilerinin çamaşir arabalarini
itmesi vb. işlerde uygulamalarini görmek mümkündür.
3.2.2 Gözlem veya Ankete Dayali Yöntemler
OWAS (Ovako Working Posture Analysing System):
OWAS, çalişanin kas-iskelet sistemindeki yüklenmeyi
ve sistemin neden olduğu kötü duruşlari belirlemeye
yarayan, gözleme dayali bir çalişma duruşu analiz
metodudur. Ayrica, iş yerinin verimlilik, konfor ve
mesleki sağlik açisindan değerlendirilmesini ve insan
makine ara kesitinin sistematik bir biçimde
incelenmesini sağlamaktadir. Bu metoda göre duruşlar
siniflandirilmakta ve işgöreni rahatsiz edici unsurlari
ortadan kaldirmak amaci ile tasarima yönelik sistematik
iyileştirmeler ve geliştirmeler yapilmaktadir [16].
Literatürde yöntemin İnşaat işlerinde, tamir bakim
işlerinde, sağlik sektöründe, hayvancilikta, taşima ve
dağitim işçiliklerinde, imalat sektöründe ve tarimcilik
işlerinde uygulandiği görülmektedir.
RULA (Rapid Upper Limb Assessment): RULA, görev
için gerekli olan gücü ve tekrarli hareketleri dikkate
alarak işle ilgili üst uzuv rahatsizliklarini ortaya çikarmak
amaciyla geliştirilmiş çalişma duruşlarini analiz eden
subjektif gözlem metotlarindan biridir [20]. Bu metot, üst
uzuv (el-bilek-dirsek-alt kol-üst kol-omuz-boyun)
rahatsizliklarina neden olan kas-iskelet yüklenmelerine
maruz kalan çalişanlari değerlendirmek amaciyla
puanlandirma sistemine dayali olarak tasarlanmiştir.
Metoda göre üst organ, boyun, sirt ve bacak duruşlarinin
önceden belirlenmiş siniflandirmalari ve sayisal değerleri
gözlenen duruşun risk puanini belirlemek için
kullanilmaktadir [21]. Yöntem, az ekipman ve çevre
değişikliği ile hizlica sonuç vermesi amaciyla
tasarlanmiştir. Ayrica yöntemin kullaniminda gözlem
tekniklerine ait önceden kazanilmiş beceri gerekmeyip
yöntemin uygulanmasi kolayca öğrenilebilmektedir [20].
Yöntem; hastabakicilik, onarim işleri, kasiyer hizmetleri,
telefon operatörleri, ultrason teknisyenleri, diş
hekimlerine ait çalişma duruşlarinin
değerlendirilmesinde başarili bir şekilde
uygulanabilmektedir.
REBA (Rapid Entire Body Assessment): REBA yöntemi,
dinamik ve statik duruşlarda söz konusu olan
yüklenmeyi, insan-yük etkileşimini göz önüne alarak
işgörenin tüm vücudunun duruşsal riskini değerlendirir.
Bu analiz ayni zamanda, bir iyileştirme yapildiği zaman,

Çalışma Duruşu Analiz Yöntemleri Ve Çalışma Duruşunun
Kas-İskelet Sistemi Rahatsızlıklarına Etkileri
H. Esen, N. Fığlalı
SAU J. Sci. Vol 17, No 1, p. 41-51, 2013 47
iyileştirmenin öncesinde ve sonrasinda rahatsizlik
risklerinin azalip azalmadiğini değerlendirmek için de
kullanilir. REBA yöntemi, RULA yönteminden
türetilmiştir. Ancak REBA yöntemi tüm vücudu göz
önüne alir ve dolayisiyla sirt, bacaklar ve dizleri de
değerlendirir.
Hemşirelik hizmetleri, hastabakicilar, ev temizliği
hizmetleri, ultrason teknisyenleri, diş hekimlerinin
yaptiklari işler REBA yöntemi ile
değerlendirilebilmektedir [22].
İş Zorlanma İndeksi (Job Strain İndex): El, bilek ve
dirsek (Distal üst ekstremite) duruşlarini göz önüne alan
bu yöntem yapilan işleri; duruş şekilleri, hareket
sikliklari ve uygulanan kuvvete göre değerlendirmekte
fakat titreşimi ya da stres faktörlerini dikkate
almamaktadir. Yöntemde göreceli risk durumlari
indekslerle belirlenmektedir. Et paketlemede, küçük
parçalarin montajinda, klavye kullaniminda ve diğer
fazla tekrarli el hareketlerinin söz konusu olduğu işlerde
kullanilmaktadir. Özellikle karpal tünel sendromu gibi
kas-tendon rahatsizliklarinin oluşumunu belirlemek için
kullanilmaktadir [23].
Hizli Maruziyet Değerlendirme (Quick Exposure
Check): Hizli Maruziyet Değerlendirme, dört vücut
bölgesinin (bel, omuzlar ve kollar, eller ve el bilekleri ve
boyun) ergonomik girişim yapilmadan önce ve
yapildiktan sonra kas iskelet sistemi risk faktörlerine
maruz kalma sonucundaki değişiklikleri değerlendirmek
için kullanilan bir yöntemdir. Yöntem ayni işi yapan iki
veya daha fazla insan arasinda veya farkli işleri yapan
insanlar arasindaki maruziyeti karşilaştirmaktadir. Hem
çalişan hem de değerlendiren kişi için sorularin yer aldiği
ve bu sorulara verilen cevaplar sonucunda skorlarin
hesaplandiği bir yöntemdir. Yöntem, elle kaldirma
görevlerinin yapildiği birçok işe rahatça
uygulanabilmektedir [5].
OCRA indeksi, görevlerin analiziyle elde edilen mevcut
teknik hareketlerle referans teknik hareketler arasindaki
orana dayalidir. Referans teknik hareket değerleri,
hareketlerin sikliği ve tekrari, uygulanan güç, duruşun
çeşidi ve vibrasyon vb. ek faktörleri de dikkate alarak
elde edilmektedir. OCRA metodu vücudun sağ ve sol
tarafi için iki farkli indeks (omuz ve dirsek/bilek/el)
oluşturmaktadir [24].
3.2.3 Kontrol Listeleri
ACGİH El/Kol Titreşim Eşik Limit Değeri (Hand/Arm
Vibration Threshold Limit Values) : ACGİH yöntemi, iki
eli kullanarak, vücudu sağ ve sol yanlara ayiran sagittal
alandan 30 derece sapma ile gerçekleştirilen tek kişilik
kaldirma hareketlerine odaklanmiştir. ACGİH ayni
zamanda kaldirma hareketleri esnasinda saatte 360’dan
fazla kaldirma hareketi yapildiği, günde 8 saatten daha
fazla sürelerde çalişildiği ve kaldirma görevi yapildiği,
fazla asimetrik çalişildiği (sagital alandan 30 dereceden
fazla sapma ile), tek elle kaldirma yapildiği, oturarak ya
da dizler üzerine çökerek kaldirma hareketi yapildiği,
sivilar gibi dengede olmayan yükler kaldirildiği,
kaldirma hareketlerinde tutamaçlar kullanilmadiği ve
ayaklarin dengede olmadiği koşullar oluştuğu zaman da
profesyonel önerilerde bulunabilmektedir. Bu yöntem,
endüstriyel hijyen ile ilgilenenlerin, çalişma ortamindaki
farkli fiziksel etkenlerle karşi karşiya kalma
durumlarinda, bu etkenlerin güvenilir seviyelerini
belirleyen kararlarin verilebilmesi için bu etkenlerin eşik
limit değerlerini belirler ve bir kilavuz oluşturarak
yayinlar. Bu yöntem sadece el, kol titreşiminin söz
konusu olduğu işler için kullanilmaktadir [25].
Risk Faktör Kontrol Listesi (UAW-GM Risk Factor
Checklist): General Motor Merkezindeki, Oto İşçileri
Birliği tarafindan hazirlanan Ergonomik Risk Faktörü
Kontrol Listesi, tekrar sikliği, güç, uygunsuz duruşlar,
zorlanma, titreşim gibi faktörleri belirlemektedir. Bu
yöntem her ne kadar otomotiv işçileri için geliştirilmiş
olsa da yemek servisinde çalişanlar, çamaşirhane işçileri,
ev temizliğinde çalişanlar, hastabakicilar, depo işçileri,
hemşireler ve ambulans hizmetlerinde çalişanlar için de
kullanilmaktadir [26].
Washington Eyaleti Yasalari Ek-B (Washington State
Appendix-B): Bu yöntem, fiziksel risk faktörlerini içeren
tipik işçi aktivitelerini barindiran işler olarak tanimlanan
tehlikeli alanlarda yapilan işlerle ilgili yaralanmalara
sebep olan iş yeri risklerini siniflandirir. Bu işler,
ergonomik farkindalik ve iş kazasi analizi eğitimlerini
gerektirecek derecede riske sahip işlerdir. Her bir iş için
fiziksel risk faktörü bulunur. Bu yöntem, gözlemlenen
işlerde; biçimsiz duruşlar, ellerin maruz kaldiği aşiri
kuvvet, fazla tekrar gerektiren işler, tekrarlanan darbeler,
ağir, sik ve biçimsiz kaldirma gibi risk faktörleri
görüldüğü zaman kullanilabilir [27].
Finlandiya Meslek Sağlik Enstitüsü tarafindan
geliştirilen Ergonomik İşyeri Analiz Metodu; iş
istasyonu tasarimi, fiziksel iş yükü, kaldirma, çalişma
duruş ve hareketleri, kaza riski, görev içerikleri, görev
kisitlamalari, kişisel ilişki ve haberleşme, karar verme,
gereken ilgi, tekrar, aydinlatma, termal çevre ve gürültü
konularinda kapsamli bir ergonomik analiz
sağlamaktadir. Gözlemci her bir maddeyi için dört ya da
beş seviyeli skalada derecelendirmektedir. Skaladaki
yüksek seviyeler çalişan sağliği açisindan risk olduğunu
gösterirken düşük seviyeler kabul edilebilir ve güvenli
çalişma koşullarini ifade etmektedir [24].
H. Esen, N. Fığlalı Çalışma Duruşu Analiz Yöntemleri Ve Çalışma Duruşunun
Kas-İskelet Sistemi Rahatsızlıklarına Etkileri
48 SAU J. Sci. Vol 17, No 1, p. 41-51, 2013
3.2.4 Sayisal Biyomekanik Ölçüler
Sayisal biyomekanik ölçüler, diğer metotlara göre daha
güvenilir ve daha kesin sonuçlar vermektedir. Bu ölçüler
araciliğiyla yapilan direk ölçümler ile, farkli görevler
içeren işler için detayli ve kesin değerler elde
edilmektedir. Fakat bu ölçümlerde kullanilan cihazlarin
yapisi karmaşik olup bu cihazlar yapilan görevin
performansini etkileyebilmektedir. Ayrica ölçümler
sonucunda elde edilen verilerin miktari büyük olduğu
için bu bilgilerin yönetimi de zor olmaktadir.
Goniometre, Eğimölçer, Potansiyometrik
Elektrogoniometre ve Esnek Goniometre direk ölçüm
yapabilen cihazlardir. Goniometreler, çalişma duruş ve
hareketlerini ölçebilen en basit cihazlardir. Bu cihazlar
genellikle hareket araliklarini sayisallaştirmak amaciyla
1910 yilindan bu yana kullanilmaktadir. Goniometereler
tüm eklemlerin hareketlerini sayisallaştirabildikleri için
1949 yilinda universal goniometreler olarak
adlandirilmiştir. 1955 yilinda Leighton tarafindan ileri
sürülen Eğimölçer, omurga hareketlerini ölçmek
amaciyla kullanilmaktadir. Tekil veya çoğul eksene sahip
olan Potansiyometrik Elektrogoniometreler ise sürekli
hareketlerin kayit edilmesine olanak tanimaktadir. Esnek
Goniometreler de duruş ve hareketlerin sürekli olarak
kaydedilmesinde kullanilmaktadir. Eksen doğrultulariyla
ilgili biomekanik problemlere meydan vermemeleri için
bu cihazlarin eksenleri bulunmamaktadir. Bu durum
ölçümlerin doğruluğunu arttirmaktadir. Bu üstünlük bu
cihazlarin potansiyometrik goniometrelere tercih
edilmesini sağlamaktadir [28].
Direk ölçüm yapilmasina olanak sağlayan fotoğraf ve
video analiz sistemleri maliyet ve kullanim üstünlükleri
sebebiyle yillardan beri çalişma duruşlarinin analiz
edilmesinde kullanilmaktadir. Günümüzde gelişen
teknoloji ile erişilebilirlikleri ve avantajlari artan bu
araçlar, çalişmada belirtilen diğer tüm çalişma duruş
analiz metotlarinin uygulanmasina destek vermek
amaciyla yaygin bir şekilde kullanilmaktadir.
Çalişma duruşlarinin analizine ve risk düzeylerinin
belirlenmesine yönelik olarak literatürde yer alan ve
yukarida sayilan yöntemleri etkinleştirebilmek veya
çalişma duruşlarini incelemeyi bilgisayar destekli olarak
gerçekleştirmek üzere yapilmiş çalişmalar da aşağida
özetlenmektedir:
Woldstad ve Stewart, 1993 yilinda yaptiklari
çalişmalarinda, ergonomi alaninda kullanilmak üzere,
video çekimlerinden insan vücut duruşlarini 3 boyutlu
kaydetmeye olanak sağlayan bilgisayar tabanli “duruş
kayit metodunu” geliştirmişlerdir. Çalişmada 5 farkli
pozisyonda (oturma, itme, kaldirma, uzanma ve
çömelme) kayitlar alinmiştir. Çalişmalarinin sonuçlari bu
metotla kaydedilen duruşlarin doğruluğunda ve hizinda,
kayit aracinin ortami algilama yeteneğinin bir etkisi
bulunmadiğini göstermektedirler [29].
Wang ve diğerleri (1996), elle taşima yapilan
görevlerdeki risklerin değerlendirmesini bilgisayar
görüntü sistemini kullanarak yapmişlardir. Geliştirilen
sistem, çalişma duruşlarini belirlemek için bilgisayar
görüntü tekniklerini kullanmakta ve sonrasinda belde
oluşan baski kuvvetini hesaplamak için biyomekanik
model ve antropometrik verileri birleştirmektedir.
Sistem, elde edilen sonuçlari belirli standart limitler ile
karşilaştirarak görevin risk seviyesini
belirleyebilmektedir [30].
Murphy ve diğerleri, 2002 yilindaki çalişmalarinda, 11-
14 yaş arasi okul çaği çocuklarinda bel ağrisi görülme
oraninin yüksek olduğunu belirtmekte ve bu amaçla okul
çocuklarinin siniftaki oturma duruşlarinin yoğunluğu,
süresi ve sikliğini gözlemlemektedirler. Çalişmada, 18
çocuğa ait oturma duruşlari 3 farkli metot kullanilarak
kaydedilmekte ve metotlar kiyaslanmaktadir [31].
Van Der Beek ve diğerleri, 1992 yilindaki çalişmalarinda
kamyon şoförlerinin çalişma duruşlari için gözlemciler
arasi güvenilirliği istatistiksel olarak test etmektedirler.
Bu güvenilirlik çalişmasinin sonucunda TRAC (Task
Recording and Analysis on Computer) metodunun
geliştirilmiş uygulamasi önerilmektedir. TRAC metodu,
gözlemciye değişkenleri belirleme ve seçme olanaği
tanimaktadir. Bu metotta iş ortaminda herhangi bir
işaretleyici bulunmaksizin kayit alinmakta ve analizler
kayit sonrasinda yapilabilmektedir [32].
Zhang ve diğerleri, 2010 yilindaki çalişmalarinda ölçülen
vücut verisini, farkli duruşlar arasinda dönüştürmek için
kullanilabilecek bir yaklaşim sunmaktadirlar. Bu
çalişmada belirli vücut duruşlarini tanimlamak için veri
dönüştürücü olarak uygun işaretler seti kullanilmaktadir.
Çalişmada kullanilan Yapay Sinir Ağinin girdi seti,
demografik veri ve verilerin dönüşümünü tanimlayan
işaretlerin koordinatlaridir. Çikti seti ise dönüştürülen
duruşlari tanimlayan işaretlerdir. Çalişmanin sonuçlari
kümelemeye dayali dönüşüm metodunun, tüm vücuda
dayali duruş dönüşüm metoduna göre sayisal olarak daha
etkili olduğunu göstermektedir. Ayrica çalişmada
işaretlerin kümelenmesinin metodun güvenilirliğine de
katkida bulunduğu belirtilmektedir [33].
ERGONOM, Swat ve Krzychowicz’un 1996 yilindaki
çalişmalarinda kullandiklari, Nofer Mesleki Tip
Enstitüsü’nde geliştirilen, çalişma alanindaki duruşlarla
ilişkili ergonomik stres değerlendirme metodudur. Bu
bilgisayar programi önceden var olan yükün, tasarim
aşamasinda tahminine olanak sağlamaktadir.
ERGONOM sistemi 3 bilgisayar programini

Çalışma Duruşu Analiz Yöntemleri Ve Çalışma Duruşunun
Kas-İskelet Sistemi Rahatsızlıklarına Etkileri
H. Esen, N. Fığlalı
SAU J. Sci. Vol 17, No 1, p. 41-51, 2013 49
içermektedir: ERGONOM 1, antropometrik ölçüleri
bilinen herhangi bir çalişan grubu için duruş şekline bağli
bölgelerin sinirlarini (yükseklikler) tanimlamaktadir.
ERGONOM 2, tasarimin erken aşamalarinda bir makine
veya diğer bir teknik objenin ergonomik teşhisi için
kullanilan programdir. ERGONOM 3, çalişanin duruşsal
aktivitelerine ait tüm verilerin analizine dayanan, makine
prototiplerinin ergonomik testi için kullanilan çalişma
duruşu değerlendirme sistemidir. Bu sistemde tasarimci,
tatmin edici çözümleri ergonomik olarak elde etmek için
değişik manuel kontrolleri ve çalişma alani
düzenlemelerini test edebilmektedir. Sistem ayrica satin
alinan makinelerin ulusal çalişan nüfusun antropometrik
ölçülerine uygunluğunu test etmeye imkan vermektedir
[34].
Keyserling ve Budnick tarafindan 3 boyutlu vücut
açilarini ölçmek için 1987 yilinda geliştirilen sistem
çalişma duruşlarini analiz etmektedir. Çalişma duruşlari
videoteyp kullanilarak kaydedilmekte ve kaydedilen
duruşlarin vücut açilari bilgisayar destekli
sayisallaştirma sistemi araciliğiyla laboratuar ortaminda
elde edilmektedir. Çalişmanin sonuçlari hesaplanan çoğu
eklem açilari için ölçüm hatalarinin küçük olduğunu
göstermektedir. Ayrica çalişmada kullanilan sistem,
direk ölçümlerin mümkün olmadiği durumlarda 3
boyutlu vücut açilarini belirlemek için yararli bir araç
olarak sunulmaktadir [35].
4. SONUÇLAR
KİSR'de çalişma duruşu çok önemli bir yere sahiptir. Bu
nedenle, bedenin uygunsuz duruşlarinin oluşturduğu risk
seviyesinin ve alinmasi gereken önlemlerin ivedilik
derecelerinin belirlenmesi gerekmektedir. Ayrica tek bir
ideal pozisyon olmadiği da unutulmamalidir. Her
çalişanin yaptiği iş tek tek ele alinarak incelenmeli; işler
çalişanin fizyolojik ve antropometrik karakteristiklerine
uygun olarak tasarlanmalidir. İşle ilişkili KİSR'den
korunabilmek için öncelikle yönetimin bu konuda
duyarli olmasi gerekmektedir.
Gerçek çalişma ortamlarini ergonomik koşullara uygun
tasarlamak ve çalişanlarin daha sağlikli çalişma duruşlari
ile iş yapmalarini sağlamak amaciyla kullanilabilecek
çeşitli ilkeler mevcuttur. Bu ilkelerin işiğinda
gerçekleştirilecek ergonomik bir tasarimin getirebileceği
ek maliyet, bu ana ilkeler işiğinda tasarlanmamiş sağlik
ve güvenlik açisindan yetersiz koşullara sahip çalişma
ortamlarinda iş yapmaktan dolayi ortaya çikacak maliyet
ile karşilaştirildiğinda çok düşük ve önemsiz kalacaktir.
Çalişma ortamlarinda karşilaşilan sorunlarin birçoğu
mevcut sağlik ve güvenlik yönetmelikleriyle ve iyi
uygulama örneklerine ilişkin rehberlerin takip
edilmesiyle önlenebilmektedir. Bu kapsamda,
işyerindeki görevlerin değerlendirilmesi, önleyici
tedbirlerin alinmasi, bu tedbirlerin etkinliğinin ve
sürekliliğinin kontrol edilmesi önemli bir yere sahiptir.
Devlet ve işverenler çalişanlarini korumak için daha çok
çaba göstermeli ve çalişanlar da kendi sağliklarini
yakindan ilgilendiren KİSR'ye ilişkin riskler konusunda
daha bilinçli olmalidir.
KİSR’nin azaltilmasini amaçlayan çalişma duruşu analiz
yöntemlerinin bir kismi uygulamada tek başina
kullanilabildikleri gibi daha detayli ve güvenilir sonuçlar
elde etmek amaciyla bir arada da kullanilabilmektedir.
Ayrica günümüzde bilişim teknolojilerinin gelişimi bu
çalişmada sayilan yöntemlerin etkinlik, güvenilirlik ve
yaygin kullanimina katki sağlamakta gelecek için
potansiyel bir çalişma alani vaat etmektedir.
KAYNAKLAR
[1] COHEN, A.L., Gjessing, C.C., Fine, L.J., Bernard,
B.P., McGlothin, J.D., Elements of Ergonomics: A
Primer Based on Workplace Evaluations of
Musculoskeletal Disorders, DHHS (NİOSH)
Publication, 97-117, 1997.
[2] BERNACKİ, E.J., Guidera, J.A., Schaefer, J.A.,
Lavin,R.A., Tsai, S.P., An Ergonomics Program
Designed to Reduce the İncidence of Upper Extremity
Work Related Musculoskeletal Disorders, Ergonomics
Program for Work Related Musculoskeletal Disorders,
JOEM, 41, 12, 1032-1041, 1999.
[3] Canadian Centre for Occupational Safety and Health
(CCOHS),
http://www.ccohs.ca/oshanswers/diseases/rmirsi.html,
Erişim Tarihi 29 Kasim 2012
[4] Occupational Safety and Health Administration
(OSHA), Musculoskeletal Disorderes,
https://osha.europa.eu/en/topics/msds/index_html,
Erişim Tarihi 29 Kasim 2012
[5] T.C. Çalişma ve Sosyal Güvenlik Bakanliği İş Sağliği
ve Güvenliği Genel Müdürlüğü, “Kas İskelet Sistemi
Hastaliklarinda Risk Değerlendirme Rehberi-Hizli
Maruziyet Değerlendirme Yöntemi”, Yayin No:144,
Ankara, Mayis 2007.
[6] NİOSH, Musculoskeletal Disorders and Workplace
Factors: A Critical Review of Epidemiologic Evidence
for Work-Related Musculoskeletal Disorders of The
Neck, Upper Extremity and Low Back Pain, Cincinnati,
OH: U.S: Department of Health and Human Services,
Public Health Service, Centers for Disease Control and
Prevention, National İnstitute for Occupational Safety
and Health, DHHS, NİOSH Publication, No. 97-141,
1997.
[7] LEİGH J, Macaskill P, Kuosma E, Mandryk J. Global
Burden of Disease and İnjury Due to Occupational
Factors, Epidemiology, 10, 5, 626–630, 1999.
[8] İşle İlgili Kas ve İskelet Sistemi Hastaliklarina Giriş,
H. Esen, N. Fığlalı Çalışma Duruşu Analiz Yöntemleri Ve Çalışma Duruşunun
Kas-İskelet Sistemi Rahatsızlıklarına Etkileri
50 SAU J. Sci. Vol 17, No 1, p. 41-51, 2013
http://osha.europa.eu/fop/turkey/tr/publications/oshayay
in/cv_fs_71.pdf, Erişim tarihi: 15.04.2012. [9] LUBECK, D.P., The Costs of Musculoskeletal
Disease: Health Needs Assessment and Health
Economics, Best Practice & Research Clinical
Rheumatology, 17, 3, 529–539, 2003.
[10] BUDAKOĞLU, İ., Akgün, H.S., Mesleki Kas
İskelet Hastaliklarindan Korunma ve Ergonomi, İş
Sağliği ve Güvenliği Dergisi, 34, 20-23, 2007.
[11] SANTOS, J., Sarriegi, J.M., Serrano, N., Torres,
J.M., Using Ergonomic Software in Non-Repetitive
Manufacturing Processes: A Case Study, İnternational
Journal of İndustrial Ergonomics, 37, 267-275, 2007.
[12] VEDDER, J., İdentifying Postural Hazards with a
Video-based Occurrence Sampling Method,
İnternational Journal of İndustrial Ergonomics, 22, 373-
380, 1998.
[13] MATTİLA, M., Karwowski, W., Vilkki, M.,
Analysis of Working Postures in Hammering Tasks on
Building Construction Sites Using the Computerized
OWAS Method, Applied Ergonomics, 24, 6, 405-412,
1993.
[14] HASLEGRAVE, C.M., What Do We mean by a
Working Posture?, Ergonomics, 37, 4, 781-799, 1994.
[15] WESTGAARD, R.H., Aaras, A., Postural Muscle
Strain as a Casual Factor in the Development of
Muscolo-Skelatal İllness, Applied Ergonomics, 15, 3,
162-174, 1984.
[16] AKAY, D., Dağdeviren, M., Kurt, M., Çalişma
Duruşlarinin Ergonomik Analizi, Gazi Üniversitesi
Mühendislik Mimarlik Fakültesi Dergisi, 18, 3, 73-84,
2003.
[17] SNOOK, S.H., Ciriello, V.M., The Design of
Manual Handling Tasks: Revised Tables of Maximum
Acceptable Weights and Forces, Ergonomics, 34, 9,
1197-1213, 1991.
[18] WATERS, T.R., Putz-Anderson, V., Garg, A., Fine
L.J. Revised NİOSH Equation for the Design and
Evaluation of Manual Lifting Tasks, Ergonomics,
Vol.36, No.7, 749-776, 1993.
[19] SHOAF, C., Genaidy, A., Karwowski, W., Waters,
T., Christensen, D., Comprehensive Manual Handling
Limits for Lowering, Pushing, Pulling and Carrying
Activities, Ergonomics, 40, 11, 1183-1200, 1997.
[20] DOCKRELL, S., O’Grady, E., Bennett, K.,
Mullarkey, C., Mc Connell, R., Ruddy, R., Twomey, S.,
Flannery, C., An İnvestigation of the Reliability of Rapid
Upper Limb Assessment (RULA) as a Method of
Assessment of Children’s Computing Posture, Applied
Ergonomics, 43, 632-636, 2012
[21] HOY, J., Mubarak, N., Nelson, S., Sweerts de
Landas, M., Magnusson, M., Okunribido, O., Pope, M.,
Whole Body Vibration and Posture As Risk Factors for
Low Back Pain Among Forklift Truck Drivers, Journal
of Sound and Vibration, 284, 933-946, 2005.
[22] HİGNETT, S., Postural Analysis of Nursing Work,
Applied Ergonomics, 27, 3, 171-176, 1996.
[23] MOORE, J.S., Garg, A., The Strain İndex: A
Proposed Method to Analyze Jobs For Risk of Distal
Upper Extremity Disorders, American İndustrial
Hygiene Association Journal, 56, 5, 443-458, 1995.
[24] CHİASSON, M., İmbeau, D., Aubry, K., Delisle,
A., Comparing the Results of Eight Methods Used to
Evaluate Risk Factors Associated with Musculoskeletal
Disorders, İnternational Journal of İndustrial
Ergonomics, 42, 478-488, 2012.
[25] SHERGİLL, A.K., Asundi, K.R., Barr, A., Shah,
J.N., Ryan, J.C., McQuaid, K.R., Rempel, D., Pinch
Force and Forearm-Muscle Load During Routine
Colonoscopy: A Pilot Study, Gastrointestinal
Endoscopy, 69, 1, 142-146, 2009.
[26] LAVENDER, S. A., Oleske, D. M., Nicholson, L.,
Andersson, G. B. J. And Hahn, J., Comparison of Four
Methods Commonly Used to Determine Low-Back
Disorder Risk İn A Manufacturing Environment,
Proceedings of the Human Factors and Ergonomics
Society, 657-660, 1997.
[27]http://www.lni.wa.gov/wisha/ergo/rule_docs/PDFs/
AppendixBfinal5-19-00.PDF, Erişim Tarihi 10 Şubat
2009.
[28] VİEİRA, E. R., Kumar, S., Working Postures: A
Literature Review, Journal of Occupational
Rehabilitation, 14. 2, 2004.
[29] WOLDSTAD, J.C., Stewart, G.B., A Computer-
Based Method for Recording Three-Dimensional Body
Postures, Computers and İndustrial Engineering, 25, 1-4,
405-407, 1993.
[30] WANG, M.J., Huang, G.J, Yeh, W.Y., Lee, C.L.,
Manual Lifting Task Risk Evaluation Using Computer
Vision System, Computers İndustrial Engineering, 31, ¾,
657-660, 1996.
[31] MURPHY, S., Buckle, P., Stubbs, D., The Use of
the Portable Ergonomic Observation Method (PEO) to
Monitor the Sitting Posture of Schoolchildren in the
Classroom, Applied Ergonomics, 33, 365-370, 2002.
[32] VAN DER BEEK, A. J., Van Gaalen, L.C., Frings-
Dresen, M.H.W., Working Postures and Activities of
Lorry Drivers: A Reliability Study of On-site
Observation and Recording on a Pocket Computer,
Applied Ergonomics, 23(5), 331-336, 1992.
[33] ZHANG, B., Horvath, İ., Molenbroek, J.F.M,
Snijders, C., Using Artificial Neural Networks for
Human Body Posture Prediction, İnternational Journal of
İndustrial Ergonomics, 40, 414-424, 2010.
[34] SWAT, K., Krzychowicz, G., ERGONOM:
Computer-Aided Working Posture Analysis System for
Workplace Designers, İnternational Journal of İndustrial
Ergonomics, 18, 15-26, 1996.

Çalışma Duruşu Analiz Yöntemleri Ve Çalışma Duruşunun
Kas-İskelet Sistemi Rahatsızlıklarına Etkileri
H. Esen, N. Fığlalı
SAU J. Sci. Vol 17, No 1, p. 41-51, 2013 51
[35] KEYSERLİNG, W. M., Budnick, P.M., Non-
İnavasive Measurement of Three Dimensional Joint
Angles: Development and Evaluation of a Computer-
Aided System for Measuring Working Postures,
İnternational Journal of İndustrial Ergonomics, 1, 251-
263, 1987.


SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 53-60, 2013 SAU J. Sci. Vol 17, No 1, p. 53-60, 2013
53
Solution of macroscopic state equations of blume-capel model using nonlinear
dynamics concepts
Asaf Tolga ÜLGEN1*, Naci SÜNEL1
1Department of Physics, Abant Izzet Baysal University, 14280 Bolu, Turkey e-mail:[email protected]
19.09.2012 Geliş/Received, 06.11.2012 Kabul/Accepted
ABSTRACT
The macroscopic state equations of Blume-Capel Model were solved by using the concepts of nonlinear dynamics.
Negative and positive exchange constant values yield bifurcations of pitchfork and subcritical flip types, respectively.
Hence, we obtained bifurcations corresponding to second order phase transitions. The critical values of parameters
were calculated from the neutral stability condition and the 3-dimensional phase diagram was plotted.
Key Words: BC Models, Phase Transitions, Bifurcation, Phase diagram
Blume-capel modelinin mikroskopik durum denklemlerini nonlinear dinamik
kavramları kullanılarak çözümlenmesi
ÖZET
Blume-Capel Modelinin mikroskobik durum denklemleri nonlinear dinamik kavramları kullanılarak çözüldü. Negatif
ve pozitif değiş-tokuş sabitlerinin değeri sırasıyla pitchfork ve subcritical dallanmalarını verir. Böylece dallanmaların
ikinci dereceden faz geçişine karşılık geldiğini elde ettik. Parametrelerin kritik değerleri nötral kararlılık koşuluyla
hesaplandı ve 3-boyutlu faz diyagramları çizildi.
Anahtar Kelimeler: Blume-Capel Model, Faz Geçişleri, Dallanmalar, Faz Diyagramı
1. INTRODUCTION
Different phases of magnetic materials are the
macroscopic states corresponding to various
reorganizations of micro-structures. Hence their
investigation constitutes the cornerstone of the present
technology. Moreover, transitions between different
macroscopic states are important. In the early 1970s,
successive phase transitions were observed
experimentally in magnetic crystals [1, 2]. Blume-Capel
(BC) Ising model has been mainly used to explain these
* Sorumlu Yazar / Corresponding Author
transitions theoretically [3, 4]. In equilibrium statistics,
the BC model has been solved by means of various
methods, such as the mean-field approximation [3, 4],
effective field theory [5], Bethe approximation [6], series
expansion methods [7], renormalization-group theory
[8], Monte Carlo simulations [9], the constant-coupling
approximation [10] and cluster-variation method (CVM)
[11].
BC model includes a bilinear Ising spin-1 model with
exchange term and biquadratic terms with crystal field

A. T. Ülgen, N. Sünel Solution Of Macroscopic State Equations Of Blume-Capel
Model Using Nonlinear Dynamics Concepts
54 SAU J. Sci. Vol 17, No 1, p. 53-60, 2013
constant. In the CVM, coupled nonlinear equations
governing the order parameters which define the
macroscopic states were obtained. In the literature, these
equations have been solved by means of Newton-
Raphson (NR) algorithm and the solutions give the
magnetization and quadruple moments in the framework
of equilibrium statistics [12, 13]. These quantities show
different characteristic behaviors with temperature.
Temperature dependence of magnetization gives rise to
paramagnetic or ferromagnetic phases. At the phase
transition temperature, the widespread NR algorithm
cannot give a solution since the derivative of the
function, which gives rise to nonlinearity in the equation
governing the magnetization, vanishes. Therefore,
plotting magnetization curves versus temperature has not
been enough to find the phase transition temperature. In
order to find this phase transition temperature, roots of
Hessian determinant are calculated. Magnetization
solutions which are found from NR algorithm do not give
information whether they are stable or not. To get
information about stability, free energy surface contours
are plotted and from these plots, the stability of solutions
are determined [14, 15]. This way of working is very
cumbersome.
Macroscopic equations, which are found by BC model
and its CVM, have been solved in the literature. Besides,
non-linear dynamic concepts have been developed for 35
years. In this study, instead of NR algorithm, we solve
macroscopic equations by means of mapping and these
solutions are explained through non-linear dynamic
concepts such as attractor, bifurcations 1-cycle and 2-
cycle, neutral stable and super stable. Our method gives
directed results without Hessian determinant and free
energy surface contours.
2. THE MODEL AND ITS SOLUTIONS
2.1 The Model
The BC Ising model is defined by the following
Hamiltonian
𝐻 = 𝐽 ∑ 𝑠𝑖𝑠𝑗 + 𝐷 ∑ 𝑞𝑖
<𝑖𝑗>
,
where 𝑠𝑖 = 0, ±1 at each lattice site, < 𝑖𝑗 > indicates
summation over all pairs of nearest-neighbor sites and
𝑞𝑖 = 𝑠𝑖2. 𝐽 is the exchange constant and 𝐷 denotes the
single-ion crystal-field interaction. We have preferred to
choose the Hamiltonian with plus sign, so 𝐽 < 0
corresponds to ferromagnetic case and 𝐽 > 0 corresponds
to anti-ferromagnetic case and 𝐽 = 0 corresponds to non-
interacting spins, respectively.
According to the Ligand Field Theory (and Crystal Field
Theory), the orientation of wave functions of the guest d-
orbital in the ligand field causes an increase in the energy
of guest electron when it is located in a place with high
host electron density. Contrary to this, the orientation of
wave functions of the guest d-orbital in the ligand field
causes a decrease in its energy when it is located in a
place with low host electron density [16]. This
phenomenon is reflected by the second term in the above
Hamiltonian. Electron paramagnetic resonance
experiments show that 𝐷 < 0 for 𝑍𝑛𝑂: 𝑀𝑛+2 and 𝐷 > 0
for 𝐶𝑑𝑆𝑒: 𝑀𝑛+2 [17]. Numerical values of 𝐷 depend on
whether the ligand is octahedral, tetrahedral or cubic. As
the radius of ligand becomes smaller and its negative
charge becomes higher, 𝐷 receives higher values. 𝐷 can
also be increased by increasing the charge of the metal
(guest) atom and replacing metal atoms having 5dorbital
instead of 3d-orbital[16]. In our calculations we
considered 𝐷 ∈ (-3.0, +3.0)eV. To the lowest order, the CVM gives us [12-15]
𝑀 =2sinh (2𝛽𝐽𝑀)
𝑒−𝛽𝐷+2cosh (2𝛽𝐽𝑀)≡ 𝑓(𝑀) (1a)
and
𝑄 =2cosh (2𝛽𝐽𝑀)
𝑒−𝛽𝐷+2cosh (2𝛽𝐽𝑀) , (1b)
as the equations governing the magnetization and
quadruple moment for spin-1 system. Here 𝛽 = 1/𝑘𝐵𝑇
(𝑘𝐵 the Boltzmann constant), 𝑀 ≡< 𝑠𝑖 > and 𝑄 ≡<𝑠𝑖
2 >. Clearly, −1 ≤ 𝑀 ≤ 1 and 0 ≤ 𝑄 ≤ 1. External
parameters are 𝛽−1, 𝐽 and 𝐷. All of these parameters are
in the unit of eV.
Eq. (1a) has been solved by the NR algorithm which uses
𝑀𝑖 = 𝑀𝑖−1 −𝐹(𝑀𝑖−1)
𝐹′(𝑀𝑖−1) ,
where 𝐹 ≡ 𝑀 − 𝑓(𝑀) and 𝐹′ is the derivative of 𝐹 with
respect to 𝑀. We have already mentioned the deficiency
of this method in the introduction. Hence, in this work
we shall follow another method that is introduced below
[18].
2.2 Solution Technique
In this work, we use nonlinear dynamics; that is we
consider iteration as a map. Eq. (1a) yields the map
𝑀𝑖+1 = 𝑓(𝑀𝑖; 𝛽−1, 𝐽, 𝐷) (1a’)
and
𝑀𝑖+1 ≡ 𝑓(𝑓(… 𝑓(𝑀0, 𝛽−1, 𝐽, 𝐷) … ))
𝑖 = 1, 2, 3, … , 𝑁
constitute the orbit initiating from the arbitrary value 𝑀0
and belonging to the specified values of the control
parameters of Eq. (1a′).

Solution Of Macroscopic State Equations Of Blume-Capel
Model Using Nonlinear Dynamics Concepts
A. T. Ülgen, N. Sünel
SAU J. Sci. Vol 17, No 1, p. 53-60, 2013 55
For given values of the control parameters, all orbits
starting from arbitrary initial values may tend a certain
point. This point is called a fixed point, 𝑀∗or 1-cycle.
Some typical examples of 1-cycles are shown in Fig. 1.
For other control parameter values, the same or some
other fixed points might be obtained.
Figure 1. Orbit of the map given by Eq. (1a′). Parameter values are
𝛽−1 = 0.25 eV, 𝐷 = 2.2 eV, 𝐽 = ±2.1 eV. a) and b) for the initial value
0.5; c) and d) for initial value -0.5. The selected initial values are not
important. Any initial value yields the same fixed point. Therefore the whole interval is the attraction domain of the fixed point zero.
If |𝑓′(𝑀∗)| < 1, 𝑀∗ is stable; if |𝑓′(𝑀∗)| > 1, 𝑀∗ is
unstable; if |𝑓′(𝑀∗)| = 0, 𝑀∗ is super-stable and if
|𝑓′(𝑀∗)| = 1, 𝑀∗ is neutral stable [18].
In the BC model, for Eq. (1a)
𝑑𝑓(𝑀)
𝑑𝑀=
4𝛽𝐽cosh(2𝛽𝐽𝑀)
2cosh(2𝛽𝐽𝑀) + exp(−𝛽𝐷)
−8𝛽𝐽sinh2(2𝛽𝐽𝑀)
(2cosh(2𝛽𝐽𝑀) + exp (−𝛽𝐷))2 (2)
is the function that will be used for the stability of fixed
points. For some other values of the control parameters,
a 2-cycle may be obtained. This means that two points
alternatively appear: 𝑀1∗, 𝑀2
∗. Some typical examples of
2-cycles are shown in Fig. 2. These 2-cycles are obtained
from Eq. (1a′) for 𝐽 < 0. However, when we consider 𝐽 >0 with the same 𝛽−1 and 𝐷, we get orbits of different
character. This time, we have 2 fixed points having
different sub-domains, [-1, 0) and (0, +1]. These orbits
are shown in Fig.3. Stable fixed points and 2-cycles
represent the macroscopic states that are the solutions of
the dynamical equations so they determine magnetization
and the quadrupole moment.
Figure 2. Orbit of the map given by Eq. (1a′):
a) initiating from +0.001and b) initiating from -0.001. Values of the
parameters are 𝛽−1 = 0.5 eV, 𝐷 = 2.2 eV, 𝐽 = -2.1 eV. The selected initial values are not important. Now the orbits yield a 2-cycle and the
whole interval is the attraction domain of the 2-cycle.

A. T. Ülgen, N. Sünel Solution Of Macroscopic State Equations Of Blume-Capel
Model Using Nonlinear Dynamics Concepts
56 SAU J. Sci. Vol 17, No 1, p. 53-60, 2013
Figure 3. Orbit of the map given by Eq. (1a′):
a) initiating from +0.001 and b) initiating from -0.001. Parameters
values are 𝛽−1 = 0.5 eV, 𝐷 = 2.2 eV, 𝐽 = +2.1 eV. Orbits initiating
from any point in the interval (-1, 0) yield the fixed point -1. Orbits
initiating from any point in the interval (0, +1) yield the fixed point +1.
Since attraction domains of the fixed points ±1 are different, these points do not form a 2-cycle.
Bifurcation, that is change of behavior of the physical
system governed by the map, may occur when at least
one of the control parameters cross the critical value. The
notation 𝛽𝑐−1, 𝐽𝑐 and 𝐷𝑐 will be used to denote the critical
values. Bifurcation from 1-cycle to 2-cycle happens
when a fixed point becomes neutral stable, i.e. |𝑓′(𝑀∗)| = 1. As we remember, Figs. 1, 2 and 3 depict
the fixed points and two- cycles for a certain temperature
value. By repeating the same procedure for each
temperature value of 𝑘𝐵𝑇 (0.0 − 3.5)eV, we found all
the fixed points and two-cycles belonging to each value
of 𝑘𝐵𝑇. Fig. 4 is obtained by plotting the fixed points and
two-cycles versus 𝑘𝐵𝑇. Thus, Fig. 4 is depicting the
bifurcation diagrams of magnetization and macroscopic
quadruple moment when 𝐽 and 𝐷 are kept constant. These
are the diagrams showing the whole behavior of the
physical system and also the values of the control
parameter at which the system changes its behavior, i.e.,
phase transitions. Stable fixed points (black circles)
represent the states that the system prefers.
On the other hand, the unstable fixed points (dots)
correspond to the states that the system does not prefer.
When all of the spins are up, the magnetization of the
system is1. In the opposite case, the magnetization is -1.
When some of the spins are up and the rest are down, the
magnetization takes any value between 1 and -1. 𝑀∗ = 0
is a trivial solution for all parameter values. However, the
interesting point is that it is a stable solution only in the
A and C phases. At the bifurcation points the system
loses its behavior and reorganizes itself to attain a new
behavior.
Another sign of stability of a fixed point is the cycle
number𝑁∗. This number, as seen from Figs. 1 and 2, is
the number of iteration until the fixed point is reached. In
the A and C phases the stable fixed points are reached
after 10 to 300 cycles; whereas at the bifurcation points
the cycle number 𝑁∗ reaches enormous values, such as at
C-B transition 𝑁∗ ≈ 5000, and B-A transition 𝑁∗ ≫20 000.
In Fig. 4, the unstable solutions are depicted by dotted
curves. At the C-B phase transition, the system quits the

Solution Of Macroscopic State Equations Of Blume-Capel
Model Using Nonlinear Dynamics Concepts
A. T. Ülgen, N. Sünel
SAU J. Sci. Vol 17, No 1, p. 53-60, 2013 57
previous equilibrium and reorganizes itself. If 𝐽 < 0, at a
certain temperature, Eq. (1a′) accepts a 2-cycle solution.
Thus, a 0 < 𝑀∗ < 1 stable solution and a -1 < 𝑀∗ < 0
stable solution of Eq. (1a′) arise for each temperature
value in a certain interval. These solutions exist in the
𝛽−1 (or𝑘𝐵𝑇) range (0.5 − 1.5eV). While 𝛽−1 decreases
𝑀∗ values increase. In Fig. 4a, we mark the increasing
𝑀∗ values. At the first glance, one may fall a
misunderstanding by thinking that the system takes 2
different magnetization at a temperature. This is not so.
The system can prefer one of these two stable solutions.
What we want to show with this figure is only the
temperature dependence of system's magnetization. The
solution preferred by the system depends on the
fluctuations of the control parameters and Figure 4. Bifurcation diagrams for 𝑀∗ and 𝑄∗. a) for 𝐽 = -1.5, 𝐷 =-1.1; b) for 𝐽 = 1.5, 𝐷 = -1.1 in eV units. Bifurcation occurs at 1:4518
eV. The stable 𝑀𝑖∗, 𝑖 = 1, 2 curves are shown. The unstable solution is
the dotted curve. Vertical axis on the left side of the graphs a) and b)
represents magnetization (𝑀∗), and the right side axis represents the
iteration step numbers (𝑁∗) up to fixed points. 𝑄∗ curve deviates from
zero when 𝛽−1 approaches 𝛽𝐶𝐵−1 from below.
the initial conditions. If 𝐽 > 0, Eq. (1a′) does not accept
a 2-cycle stable solutions but 1-cycle (fixed point) stable
solutions (Fig. 3). Therefore in Fig. 4b in the B phase we
have only one curve showing again the 𝛽−1dependence
of 1-cycles. Dotted curves in Figs. 4a and 4b represent
the unstable solutions.
At the bifurcation points, Eq. (2) takes the form
𝑑𝑓(𝑀∗)
𝑑𝑀|
𝑀∗=0=
4𝛽𝐽
2 + exp (-𝛽𝐷) , (3)
which yields the following relations between the control
parameters: For stable 𝑀∗,
4𝛽|𝐽| < 2 + exp(-𝛽𝐷) ; (4a)
for unstable 𝑀∗(beginning of bifurcation),
4𝛽|𝐽| > 2 + exp(-𝛽𝐷) ; (4b)
for super stable 𝑀∗,
4𝛽|𝐽| = 0 (4c)
and for neutral stable 𝑀∗,
4𝛽|𝐽| = 2 + exp(-𝛽𝐷). (4d)
Condition (4c) is satisfied for either 𝛽 = 0, i.e. at the high
temperature limit, the system is super stable (𝑀∗=0) or
𝐽 = 0.
3. NUMERICAL RESULTS AND
DISCUSSION
In the 𝐽 < 0 case, as is seen from bifurcation diagram, the
bifurcation at 𝑇𝐵𝐴 is of pitchfork type. The first term in
the Hamiltonian is negative and the spins force each other
to align. But in 𝐽 > 0 case, the bifurcation at 𝑇𝐵𝐴is
subcritical flip [18], as is seen from Fig. 4b. This is the
ferromagnetism (phase B in Figs. 4a and 4b).
As is well known, the tangent and pitchfork bifurcations
are related to the second-order phase transitions [19].
Therefore the phase transition from phase A to phase B
is of second order. But a first order phase transition
includes discontinuity in magnetization. Therefore the B-
C transition is of first order (Fig. 4). Hence, for 𝐷 < 0,
two successive phase transitions (firstly second order and
secondly first order) appear while for 𝐷 > 0 only a
second order phase transition appears (Fig. 5). In our
work, the phase transition temperatures are the values
where the bifurcations occur. Hence, plotting
magnetization versus temperature using Eq.(1a′) gives us
precisely the phase transition temperatures. Moreover,
Eq. (4d) provides us with a more direct way of finding
the phase transition temperature without solving Eq.(1).
Fig. 4a gives evidence a pitchfork bifurcation in the
magnetization curve at 𝛽𝐵𝐴−1 = 𝑘𝐵𝑇𝐵𝐴. This is the phase
transition temperature from the paramagnetic phase to
the ferromagnetic phase. At 𝛽𝐶𝐵−1 = 𝑘𝐵𝑇𝐶𝐵, the period
doubling ends and we get zero fixed points. Therefore,
we may conclude that at 𝛽𝐶𝐵−1 a discontinuous bifurcation
happens. In Fig. 4b, a subcritical flip bifurcation occurs
just at 𝑇𝐵𝐴. The phase transition corresponding the
bifurcation at 𝑇𝐵𝐴 is a second order while the bifurcation
at 𝑇𝐶𝐵is of first order for both 𝐽 < 0 and 𝐽 > 0. As we
have found the temperature variation of magnetization
we easily deduce the temperature variation of 𝑄∗ by Eq.
(1b). 𝑄∗ bifurcates also at the same critical temperatures.
In Figs. 4a and 4b, the temperature region named A,
where the dipole moment vanishes but the quadruple
moment takes a non-zero value, is interpreted as a
representation of a disordered phase, the paramagnetic
phase. The region named B, where both the dipole and
quadruple moments are non-zero, clearly corresponds to
an ordered ferromagnetic phase. Phase C appears only if
𝐷 < 0. Because 𝑀∗ = 0, phase C is a paramagnetic
phase. However, this paramagnetic phase interpretation
does not seem acceptable since in the near vicinity of
absolute zero a complete disorder cannot be possible. At
the crossing of paramagnetic and ferromagnetic regions,
a second order phase transition is evident from Fig. 4a.
But if the phase C would represent a new magnetic
organization other than paramagnetic one, the transition

A. T. Ülgen, N. Sünel Solution Of Macroscopic State Equations Of Blume-Capel
Model Using Nonlinear Dynamics Concepts
58 SAU J. Sci. Vol 17, No 1, p. 53-60, 2013
at the crossing of ferromagnetic phase to phase C ought
to be of second order. However, because of the
discontinuity, the transition from B to C is of first order
(Fig. 4a). On the other hand, as mentioned above, first
order phase transition from B to C is a contradiction.
𝑄∗ curve has two pieces in region C: Up to 𝑇𝑞 it is zero
and above 𝑇𝑞 it shows a parabolic behavior (Fig. 4c).
Hence below 𝑇𝑞 the system is paramagnetic. However,
we want to repeat here our remarks that were mentioned
earlier: Above 𝑇𝑞, the phase is not paramagnetic because
𝑀∗ = 0 but 𝑄∗ ≠ 0. Fig. 5 shows the bifurcation
diagrams versus 𝐷 for various ±𝐽 values. With increasing
𝐷, the shift to higher values of the critical temperature
belonging to second order phase transition is clear for
both negative and positive 𝐽 interactions. First order
phase transitions occur for only negative values of 𝐷 but
disappear as 𝐷 → 0. Second order phase transitions
always exist independently of 𝐽, even for 𝐷 = 0.
Figure 5. Critical temperature shift as the crystal field increases. a) 𝐽 = ±0.4, b) 𝐽 = ±0.8, c) 𝐽 = ±1.4 and
d) 𝐽 = ±2.4 eV. Each graph consists of curves belonging to 𝐷 = 0.0, ±0.6, ±1.4, ±2.2 and ± 3.0 eV.

Solution Of Macroscopic State Equations Of Blume-Capel
Model Using Nonlinear Dynamics Concepts
A. T. Ülgen, N. Sünel
SAU J. Sci. Vol 17, No 1, p. 53-60, 2013 59
When the critical temperature is used instead of phase
transition 𝛽 value, Eq. (4d) can be rewritten as
𝑘𝐵𝑇𝐶 =4|𝐽|
2 + 𝑒−𝐷/𝑘𝐵𝑇𝐶 . (5)
We solve Eq. (5) using the graphical technique, that is we
plot the curves defined by both sides on the same axes
system and find the intersection points (Fig. 6).
Fig. 6 shows that for 𝐷 > 0, the second order phase
transition temperature increases with increasing 𝐷. But
for 𝐷 < 0 the first order phase transition temperature
reduces and the second order phase transition
temperature increases as 𝐷 → 0. For 𝐷 > 0, the first
order phase transition disappears. Besides, for 𝐷 = 0, a
second order phase transition appears. This last finding is
also supported by the magnetization curve plots in Fig. 5.
On the other hand, when 𝐷 = 0 the Hamiltonian consists
only the Ising term. For spin 1, according to our
investigation, a second order phase transition
theoretically exists (Fig. 5), i.e. spontaneous
magnetization can be observable.
Figure 6. Graphical solution of Eq. (5) for 𝐽 = |1.4| eV. For 𝐷 > 0 we have only one intersection point determining the second order phase
transition temperature; for 𝐷 < 0 we have either two or zero
intersection points depending on 𝐷 values. In the first case, the first intersection point determines the first order phase transition and the second intersection point determines the second order phase transition
temperatures, respectively.
In Fig. 7 we show the phase diagrams obtained by using
the numerical results derived from Fig. 6. In the
literature, the phase diagram is generally plotted in two
dimensions by defining the axes as 𝐷/𝐽 and 𝑘𝐵𝑇/𝐽, the
reduced parameters. In these phenomena, the sign of 𝐷
and 𝐽 play a role. By using 𝐷/𝐽 axis, we lost the signs of
𝐷 and 𝐽, e.g. 𝐷/𝐽 becomes positive for both +/+ and
−/− whereas 𝐷/𝐽 becomes negative for both +/− and
−/+. For this reason, information is partly lost. To
overcome this difficulty, we preferred to plot the phase
diagram in 3-dimensions. Our axes are 𝑘𝐵𝑇, 𝐽 and 𝐷.
Figure 7. Phase diagram obtained for the B-C model with spin 1. a) 𝐽 ∈(0.0, 3.0)eV, D ∈ (−3.0, 0.0)eV and 𝛽 ∈ (0.0, 3.5)eV. Red surface (C-B transition) is the surface on which first order phase transition occurs. Black surface (B-A transition) is the surface on which second order
phase transition occurs. b) 𝐽 ∈ (0.0, 3.0)eV, D ∈ (−3.0, 3.0)eV and
𝛽 ∈ (0.0, 3.5)eV.
In calculations done with reduced quantities, Boltzmann
constant is considered to be 1. One can approach to
absolute zero of temperature without considering the
investigated material. But in experiments, what is
reduced to absolute zero is temperature itself. The
important problem is to observe materials having
interesting magnetic behavior near absolute zero [20, 21].
Therefore we preferred using temperature instead of
reduced temperature.
In our numerical calculations due to the hyperbolic
functions in Eq. (1), we could not approach to absolute
zero and truncated at 40 K although double precision was
used (Real*8) in our fortran code. If the value of
temperature is taken below 40 K, an overflow error

A. T. Ülgen, N. Sünel Solution Of Macroscopic State Equations Of Blume-Capel
Model Using Nonlinear Dynamics Concepts
60 SAU J. Sci. Vol 17, No 1, p. 53-60, 2013
occurs. The temperature limit decreased to 32 K when
Real*16 precision was used. This temperature limit is
due to the numerical calculation of exponential terms.
From Figs. 4 and 5, we see that the phase transition points
remain the same under the 𝐽 → −𝐽 transformation. Using
this symmetry, we have plotted the phase diagram only
for 𝐽 > 0. Fig. 7a is depicting the phase diagram only for
the negative 𝐷 values. Concave upward surface
represents the first order phase transition where the
concave downward surface represents the second order
phase transition.
The left side domain of the concave downward surface
corresponds to paramagnetic state while the right side
domain corresponds to the ferromagnetic state. The
concave upward surface separates both the paramagnetic
and ferromagnetic domains. In the literature, these lower
parts are called as dense and the upper parts are named as
diluted paramagnetic/ferromagnetic domains [12,13].
The intersection curve of the concave upward surface
with the concave downward surface corresponds the
embryo of ferromagnetic phases. In 2-dimensions, this
curve is replaced by a certain point, called tricritical
point. For all values of 𝐷 second order phase transitions
are observed.
4. CONCLUSION
In this work, we propose to use the concepts of nonlinear
dynamics to calculate phase transitions in the spin-1 BC
model. Phase transition temperatures are related to the
bifurcation points. Second order phase transitions
correspond to pitchfork and subcritical flip bifurcations.
Moreover we obtained a simple equation from which we
directly find the phase transitions without using the
Hessian and free energy surfaces. Our method directly
gives both second and first order phase transitions. In the
literature, the second order phase transition can be
calculated from Eq.(1a) but the first order phase
transition is only obtained from free energy surface
contours. The thermodynamical phenomena is invariant
under 𝐽 → −𝐽. Even for 𝐷 = 0 case, a second order
phase transition has been observed at finite temperatures.
The phase C in Figs. 4 and 5 appears for only negative 𝐷
values. In this phase, both 𝑀∗ = 0 and 𝑄∗ → 0. When
both are zero, the phase is completely disordered. Here
we believe that there are three open questions: (a)
Transition from phase B to phase A is of second order. If
phase C is paramagnetic just like phase A, why must
phase C-B transition not be second order? But our
calculations give a first order magnetic phase transition.
(b) Can paramagnetic phase exist near vicinity of
absolute zero? (c) During the numerical solution of Eqs.
(1a) and (4d) at temperatures below 32 K we obtained an
overflow. What is the behavior below this temperature?
In future we hope that these questions will be figured out
at least partially.
ACKNOWLEDGMENTS
With great appreciation, we thank Dr. E. Rızaoğlu for
correcting the manuscript.
REFERENCES
[1] Cooke A H, Martin D and Wells M R, Solid State
Commun 9, 519 (1971).
[2] Sayetat F, Boucherle J X, Belakhovsky M, Kallel
A, Tcheou F and Fuess H, Phys. Letters 35A, 361
(1971).
[3] Capel H W, Physica 32, 966 (1966).
[4] Blume M, Phys. Rev. 141, 517 (1966).
[5] Siqueira A E, Fittipaldi I P, Physica A 138, 599
(1986).
[6] Tanaka Y, Uryˆu N, J. Phys. Soc. Japan 50, 1140
(1981).
[7] Saul D M, Wortis M, Stauffer D, Phys. Rev. B 9,
4964 (1974).
[8] Berker A N, Wortis M, Phys. Rev. B 14, 4946
(1976).
[9] Arora B L, Landau D P, Proc. AIP 5, 352 (1972).
[10]Takanaka M, Takahashi K, Phys. Stat. Sol. B 93,
K85 (1979).
[11]Ng W M, Barry J H, Phys Rev B 17, 3675
(1978).
[12]Ekiz C, Keskin M, Yalçın O, Physica A 293,
215 (2001).
[13]Keskin M, Ekiz C, Yalçın O, Physica A 267,
392 (1999).
[14]Keskin M, Özgan Ş, Physica Scriptia 42, 349
(1990).
[15]Özsoy O, Keskin M, Physica A 319, 404 (2003).
[16]Cotton F A, The Crystal Field Theory.
Chemical Applications of Group Theory, 3nd ed.
(John Wiley& Sons, New York, 1990).
[17]Kuang X Y, Phys. Lett. A 213, 89 (1996).
[18]Thompson J M T, Stewart H B, Nonlinear
Dynamics and Chaos, 2nd ed. (John Wiley&
Sons, 2002).
[19]Schuster H G, Just W, Deterministic Chaos,
(Wiley-VCH Verlag, Weinheim, 2005).
[20]Wigger G A, Felder E, Monnier R, and Ott H R,
Pham L, Fisk Z, Phys. Rev. B, 014419 (2005).
[21]Rößler S, Harikrishnan, Naveen Kumar C M,
Bhat H L, Elizabeth Suja, Rößler U K, Steglich
F, Wirth S, J Supercond Nov Magn 22, 205-
208 (2009).

SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 61-69, 2013 SAU J. Sci. Vol 17, No 1, p. 61-69, 2013
61
Yapay sinir ağı yaklaşımıyla çinko kalınlığının tahminlenmesi
Tuğçen Hatipoğlu1*, Semra Boran2, Burcu Özcan1, Alpaslan Fığlalı1
1*Kocaeli Üniversitesi, Mühendislik Fakültesi, Endüstri Mühendisliği, Kocaeli 2Sakarya Üniversitesi, Mühendislik Fakültesi, Endüstri Mühendisliği, Sakarya
03.10.2012 Geliş/Received, 24.12.2012 Kabul/Accepted
ÖZET
İşletmeler arasında artan rekabet nedeniyle müşterinin istediği kalitede ürün üretmek ve maliyetlerin düşürülmesi
öncelikli hedeflerdendir. Galvaniz sektöründe temel hammadde girdisi olan Çinko (Zn), en önemli maliyet kalemini
oluşturmaktadır. Hem müşteri tekliflerinin hazırlanması aşamasında kullanılacak çinko miktarının tahmin edilmesi,
hem de optimum kaplama kalınlığının elde edilebilmesi için uygun imalat koşullarının sağlanması gerekmektedir.
Çalışmada galvaniz sektöründe faaliyet gösteren bir firmada Yapay Sinir Ağı (YSA) yardımıyla galvaniz işlemi
sonucunda elde edilecek kaplama kalınlığı tahmin edilmeye çalışılmıştır. Tahmin edilen değerlerin gerçek verilerle
uygunluğunu test etmek açısından hipotez testi uygulanmış; modelden elde edilen değerlerle gerçek değerlerin
ortalaması arasında istatistiksel olarak anlamlı bir fark olmadığı görülmüştür.
Anahtar Kelimeler: Tahminleme, Metasezgisel, Yapay Sinir Ağları, Kaplama Kalınlığı
Forecasting of zinc coating thickness with artificial neural networks
ABSTRACT
Since the competition level among the companies is increasing day by day, meeting customer demands with
qualified products and cost reduction are primary goals of each company. And zinc, the main raw material in
galvanization sector, is the most important cost item. So it is required to forecast the amount of zinc to be spent. In
this study it is tried to forecast the amount of zinc consumption using the artificial neural network (ANN) method. To
evaluate the convenience of values hypothesis tests are done; and the results showed that there is no significant
difference between the predicted and real outputs statistically.
Keywords: Forecasting, Metaheuristics, Artificial Neural Networks, Coating Thickness
* Sorumlu Yazar / Corresponding Author

1. GİRİŞ
İşletmelerde güvenilir maliyet verilerine ulaşmak,
öncelikle yöneticilerin sağlıklı kararlar verebilmeleri
için bilgi gereksinimlerini karşılamak amacını taşır. Bu
temel amacın dışında doğru verilerin elde edilmesi kısa
dönemde ve uzun dönemde pek çok getiri sağlar.
Yapılan yatırım sonucunda istenen oranda kar elde
edilmesi, teklif fiyatlarının belirlenmesi, işletmede
başarının değerlendirilmesi, maliyet kontrolü vb.
çalışmalar bu getiriler arasında sayılabilir. Böylece her
bir ürün için planlanan başarının sağlanıp sağlanmadığı,
teklif fiyatlarından piyasa durumuna göre ne kadar
indirim yapılabileceği belirsizlikten kurtarılmış olur.
Sipariş maliyet yöntemi farklı malzeme ve işçilik
giderlerini ve farklı üretim yöntemlerini gerektiren
birden çok ürünün üretildiği işletmelerde uygulanır.
Uygulamanın gerçekleştirildiği işletmede bu yöntem
kullanılmakta ve direkt malzeme giderlerinin doğru
hesaplanmasına yönelik verilerin sağlanması çalışmanın
temelini oluşturmaktadır. Bu süreç işletmedeki ilgili
bilgilerin ham veri olarak toplanmasından başlayıp,
yöneticilere nihai işlenmiş verilerin sunulmasıyla sona
erer.
Çalışmada hedef üretim maliyetlerinden olan direkt
çinko maliyetinin hesaplanması için gerekli kaplama
kalınlığı bilgisinin tahmin edilmesidir. Bu maliyet
üretim hacmi ile aynı yönde değişim gösterir, yani
üretim miktarının bir fonksiyonudur. Maliyet
fonksiyonlarının tahmin edilmesinde iş ölçümü
yaklaşımı, en düşük ve en yüksek noktalar yöntemi,
basit ya da çoklu regresyon yöntemleri kullanılırken,
son dönemde yapay sinir ağları modeli de bu yöntemler
arasına katılmıştır. Çoklu regresyon yöntemi ile
yapılmış birçok tahmin etme çalışması vardır, ancak bu
yöntemde bazı koşullar sağlanmazsa sağlıklı maliyet
öngörüsü yapılamaz. Bu koşullardan bazıları bağımlı ve
bağımsız değişkenler arasında ekonomik mantığı olan
bir ilişkinin varlığı, bağımsız değişkenin bağımlı
değişkende gözlemlenen değişmelerin önemli bir
bölümünü açıklıyor olması, doğrusallık varsayımı, hata
terimlerinin bağımsızlığı ve normal dağıldığıdır. Bu
varsayımlar pratikte sağlanmıyorsa ve belirlenen
probleme uymuyorsa bu yöntemi kullanmak yersiz
olacaktır. Ancak yapay sinir ağları yönteminin bu
dezavantajları bulunmamakta, değişkenler arasındaki
belirsiz ilişkileri çözüp, güvenilir bir şekilde analiz
ederek yorumlamaktadır.
Literatürde üretim alanında tahmin etme amacıyla YSA
modeli kullanılan pek çok çalışmaya rastlamak
mümkündür.
Zhang ve Fuh (1998) ürün maliyetlerinin tasarım
aşaması boyunca etkin bir şekilde kontrol edilmesine
odaklanmıştır. Bu da üretimin proses planları tam olarak
netleşmeden ürünün maliyetinin tahmin edilmesini
gerektirir. Bu makalede geri yayılımlı yapay sinir ağı
kullanarak maliyet tahmini amaçlanmış ve yalnızca
tasarım bilgisinden yola çıkılarak ürün maliyetinin
tahmini için bir prototip geliştirilmiştir. Ürün
tasarımında maliyete ilişkin bütün unsurlar belirlenerek,
bu maliyete ilişkin unsurlar arasındaki korelasyon ve
ürünün nihai maliyeti geri yayılımlı sinir ağı eğitilerek
belirlenmiştir. Test örnekleri kullanarak sistemin
performansı da çalışmada verilmiştir[1]. Kermanshahi
ve Iwamiya (2002) Japonyada 2020 yılına kadar olan
elektrik yükünün tahmin edilmesi için 10 faktör ele
almıştır. (yerli ürünler, nüfus, hissedar sayısı, hava
koşulları, CO2 miktarı, endüstri üretim indeksi, benzin
fiyatları, enerji tüketimi ve elektrik fiyatları). Yapay
sinir ağı yaklaşımını kullanarak elektrik yükünü tahmin
etmişlerdir[2]. Benzer bir çalışmada yeni tipte fren diski
üretmeye başlayacak olan bir firmada üretim
maliyetlerinin tahmin edilmesini için yapay sinir ağları
kullanılmış ve yapay sinir ağları teorisinin geçerliliğini
göstermiştir[3]. Qing Wang’ta makalesinde yapay sinir
ağı kullanarak bir maliyet modeli geliştirmiştir[4].
Günaydın ve Doğan (2004) inşaat sektöründe
maliyetlerin tahmin edilmesinde yapay sinir ağları
yönteminden faydalanmışlar ve çalışma sonucunda %
93 başarıya ulaşmışlardır[5]. Pendharkar (2006) kaynak
kod dökümantasyonunu etkileyen faktörleri yapay sinir
ağı tahminleme modeli ve lineer regresyon modeliyle
araştırmıştır. Doğrusal olmayan değişkenlerin çoklu
girdileri ve çoklu çıktıları arasında ölçek ekonomisinin
var olduğu durumlarda yapay sinir ağlarının daha iyi
performans gösterdiği görülmüştür[6]. Bir diğer
uygulama alanı ise Ispanya’daki elektrik üretim
piyasasında enerji fiyatlarının tahmini için Box–Jenkins,
ARIMA ve ANN modeli kullanılmasıdır. Bu makalede
ANN modelinde hem çok katmanlı algılayıcı
kullanılmıştır[7]. Caputo ve Pelagagge (2008) ‘nin
araştırmalarında karmaşık tasarımlı ve büyük ölçekli
basınçlı kazan üretim maliyetlerinin tahmin edilmesi
için YSA ile parametrik yöntemler karşılaştırılmıştır.
Kazanın ölçü değişkenliğinin ve konfigurasyonun çok
olması, önceki siparişlere benzer özellikteki siparişlere
nadir rastlanması imalat maliyetlerinin tahmin
edilmesini zorlaştırmaktadır. Parametrik yöntemlerle
bulunan hata tahmini %12 iken, YSA yaklaşımı ile
bulunan hata yüzdesi %9 olarak bulunmuştur. YSA,
parametrik yaklaşıma göre daha iyi sonuçlar
vermiştir[8]. Artan rekabet koşulları, şirketleri metal
levha sektöründe kısa sürede doğru maliyet tahmini
yapacak yeni araçlar bulmaya zorlamıştır. Verlinden ve
diğerlerinin (2008) çalışmasında regresyon teknikleri ile
yapay sinir ağları teknikleri karşılaştırılmış,
gözlemlenen sonuçlar YSA’nın daha iyi sonuçlar

Yapay Sinir Ağı Yaklaşımıyla Çinko Kalınlığının
Tahminlenmesi
T. Hatipoğlu, S. Boran, B. Özcan, A. Fığlalı
SAU J. Sci. Vol 17, No 1, p. 61-69, 2013 63
verdiğini göstermiştir[9]. Çinko kaplama ile ilgili
Rešković ve Glavaš bir çalışma yapmış ve YSA
yöntemini tercih etmişlerdir. Girdi faktörleri olarak ise
çinko havuz sıcaklığı, bekleme süresi ve et kalınlığını
almışlardır[10].
2. YAPAY SİNİR AĞLARI
Yapay sinir ağları, insan beyninin özelliklerinden olan
öğrenme yolu ile yeni bilgiler türetebilme, yeni bilgiler
oluşturabilme ve keşfedebilme gibi yetenekleri,
herhangi bir yardım almadan otomatik olarak
gerçekleştirmek amacı ile geliştirilen bilgisayar
sistemleridir[11].
Yapay sinir ağı, basit işlem hücrelerinden oluşan,
bilgileri depolama ve kullanabilme yeteneğine sahip
yoğun paralellikte dağılmış yapıdaki bir işlemcidir. Bu
işlemci iki yönden beyin ile benzer özellik gösterir.
1) Bilgi, öğrenme yoluyla çevreden elde edilir.
2) Bilgi depolamak için, sinaptik ağırlıklar olarak ta
bilinen nöronlar arasındaki bağlantılar kullanılır[12].
Yapay sinir ağı, biyolojik sinir hücreleri ile ortak
performans özelliklerine sahip bir bilgi işleme
sistemidir[13,14].
Tipik olarak, Şekil 1’de görüldüğü üzere bir YSA’nın
mimarisi (veya yapısı) oluşturulur ve çeşitli transfer
fonksiyonları (doğrusal, sigmoid gibi) kullanılarak
üretilen çıktıların doğruluk seviyesinin artırılması için
gerekli olan ağırlık değerleri belirlenir. YSA’nın eğitimi
sayesinde önceki örnekleri kullanılarak ağırlıklar
belirlenir, giriş değişkenleri ile tahmin edilen
değişkenler arasındaki ilişki ortaya çıkartılır. Ağ
eğitildikten sonra, YSA yeni verilerle çalıştırılabilir ve
tahminler üretilebilir. Bir ağın performansı, amaçlanan
sinyal ve hata kriteri ile ölçülür. Ağın çıktısı, amaçlanan
çıktı ile karşılaştırılarak hata payı elde edilir. Geri
Yayılma algoritması ile hata payı azaltılması amaçlanır.
Bu işlem defalarca tekrar edilerek ağ eğitilir. Eğitme
işleminin amacı performans ölçümleri bazında optimum
çözüme ulaşmaktır.
Şekil 1. Yapay sinir ağı modeli
Böylece, örnekler genelleştirilerek daha önceden
görülmemiş örnekler için sonuç üretilmiş olur[15]. Ek
olarak matematiksel modele ihtiyaç duyulmaması en
önemli avantajlarındandır, kendi kendine öğrenme
yeteneğine sahiptir[16].
Yapay sinir ağları, tahmin etme[17-19], sınıflama[20-
22], görüntü tanıma[23] gibi çok çeşitli alanlarda
uygulama olanağı bulmuştur. Bu çalışmada yapay sinir
ağı tahmin etme alanında kullanılmıştır.
3. YAPAY SİNİR AĞI KULLANARAK ÇİNKO
MİKTARININ BELİRLENMESİ
Ürün kalitesinden ödün vermeden galvanizleme
prosesinin en büyük maliyet kalemini oluşturan
çinkonun kaplama kalınlığının tahminine yönelik bir
model kurulmuş ve elde edilen değerler sonuç kısmında
yorumlanmıştır. Sıcak daldırma galvaniz basit anlamda
tasarımı ve kimyasal kompozisyonu galvanizlemeye
uygun demir ve çelik ürünlerinin ergimiş çinko
banyosuna daldırılmasıyla oluşan difüzyon sonucu
meydana gelen metalik tepkimeyle oluşan kaplama
yöntemidir. Bu kaplama yöntemine olan talep her yıl
biraz daha artmaktadır.
Galvanizleme prosesinin adımları özet olarak şu şekilde
açıklanabilir.
a-İlk olarak galvanizlemeye uygun olan ya da
galvanizleme öncesi hazırlık işlemine tabi tutulan
ürünler dik, yatay veya açılı olmak üzere 3 tipte
askılama işlemi uygulanabilir.
b-Askılanan ürünler üzerlerindeki kirlilik, yağ ve
kimyasal artıkların temizlenmesi için alkali havuzuna
daldırılır. Banyoda tutma süresi ortalama olarak 3-7
dakikadır ve bu süre malzeme yüzeyinin temizliğine
bağlı olarak değişir.
c-Yağ alma havuzlarında ürünlerin sadece yüzeyindeki
kolay lekeler temizlenir, ancak ürünlerdeki pası
temizlemek için asit havuzlarında işlem görmeleri
gereklidir. Bu yüzden %18’lik konsantrasyona sahip
HCL asit banyolarına daldırılarak malzeme üzerindeki
pas temizleninceye kadar bekletilir. Ürün yüzeyinde pas
olmasa bile yüzeyin galvaniz için aktifleşmesi için asit
banyolarında tutulur.
d-Asit banyosundan çıkan ürünler su banyosuna
daldırılarak durulanır ve ergimiş çinkonun ürün
yüzeyine yapışması için 50-70 ºC sıcaklıkta %30
NH4CI-ZN CI2’den oluşan flaks banyosuna daldırılır.
e-Son olarak ise yüzeyi temizlenmiş ve flaks kaplanmış
ürünler 445-465 ºC sıcaklıkta “Ocak” denilen ergimiş
çinko banyosuna daldırılarak kaplanır. Galvaniz
ocağından çıkarılan deforme olabilecek ürünler havada
soğutulur, diğer ürünler su banyosunda soğutulur.
Proses sonucu galvaniz kaplanan ürünlerin kaplama
kalınlıkları dijital mikrometre ile ölçülür. Ölçüm
sonuçlarına göre kaplama hataları olan ürünler tamir

edilir veya yeniden işlenir. Varsa çinko akıntıları bir eğe
yardımıyla temizlenir. (Şekil 2)
Şekil 2 Proses Akış Diyagramı
Çalışmada yöntem olarak YSA tercih edilmiştir. Bunun
en önemli sebebi YSA’ların genelleştirme
yeteneklerinin bulunmasıdır. İşletme çok geniş bir ürün
yelpazesine sahiptir ve her ürün için ayrı bir model
kurulması imkânsızdır. Çünkü gerekli verilerin
toplanması hem zahmetli olacaktır, hem de daha sonra
aynı ürünün siparişinin gelmemesi durumu söz
konusudur. Bu nedenle gelen herhangi bir çelik
malzemenin kaplama kalınlığını verecek bir sisteme
ihtiyaç duyulmaktadır. YSA tanımadığı örnekler için de
çözüm üretebilme yeteneğine sahiptirler ve bu nedenle
bu yöntem tercih edilmiştir. Bunun dışında tahmin etme
çalışmalarındaki yüksek başarısı, veriler arasında ki
karmaşık ilişkilere cevap verebilmesi, kullanım
kolaylığı ve hızı da bu yöntemin kullanılmasının diğer
sebepleridir.
a. Kaplama Kalınlığına Etki Eden Faktörler
Bu çalışmada kullanılan ve ürün kaplama kalınlığına
etki eden parametreler konuyla ilgili uzmanlar
tarafından beyin fırtınası yöntemiyle belirlenmiştir. Bu
parametrelerin anlamları ve kurulacak yapay sinir ağı
modeline etkisi sırasıyla açıklanmıştır.
1.Ortalama et kalınlığı (OEK): Ortalama et kalınlığı
çinko sarfiyatını doğrudan etkileyen faktörlerden ilkidir.
Ortalama et kalınlığı artıkça diğer bütün parametrelerin
sabit tutulması durumunda kaplama kalınlığı artarken,%
Zn sarfiyatı düşmektedir. Ortalama et kalınlığı azaldıkça
ise kaplama kalınlığı azalır ve %Zn sarfiyatı artar.
Ancak bu artış ve azalışlar sabit bir oranda olmayıp
çeliğin cinsine göre değişmektedir.
2.Parça geometrisi: Bu parametrede ölçülmeye
çalışılan faktör parçanın sıcak daldırma galvaniz için
uygunluk derecesidir. Parça geometrisi toplanan bütün
verilerde aynı uzman kişi tarafından 1-10 ölçeğinde
takdir edilmiştir. Böylece farklı kişilerin farklı
değerlendirmeler yaparak çalışmanın objektifliğini
etkilemesinin önüne geçilmiştir. Parça geometrisi
değerlendirilirken dikkate alınması gereken alt başlıklar
havuza dalış sayısı, patlama riski, parçanın havuzda
yüzme durumu ve süzülme kolaylığıdır ve açıklamaları
aşağıda yer almaktadır:
- Havuza dalış sayısı: Küçük hacimli sac malzemeler,
boyu çok uzun olmayan borular gibi kimi parçalar
havuza tek dalış ile kaplanabilirken, hacmi çok büyük
profiller gibi kimi malzemeler ise çift dalış
gerektirmektedir. Bu ise hem operatörün işini
zorlaştırmakta hem de malzemenin askıda geçirdiği
süreyi iki katına çıkarmaktadır.
- Patlama riski olan malzemeler: Bu madde sıralanan
parametreler içinde en önemliler arasındadır. Doğrudan
geometriyle ilişkisiz gibi görünse de galvaniz
sektöründe parçanın geometrisinden kaynaklanan
sebepler iş güvenliği açısından tehlike yaratmaktadır.
Malzeme
kabul
Malzeme
Askılama
Yağ Alma
Asitte Yüzey
Temizleme
Durulama
Flaks
Kaplama
Galvanizleme
Defor
me
Olma Riski
Su ile Soğutma
Havada
Soğutma
Bakım ve
Kontrol
Sevkiyat
Ürün
Hatalı
mı?

Yapay Sinir Ağı Yaklaşımıyla Çinko Kalınlığının
Tahminlenmesi
T. Hatipoğlu, S. Boran, B. Özcan, A. Fığlalı
SAU J. Sci. Vol 17, No 1, p. 61-69, 2013 65
Örneğin birbirine kaynak ile birleştirilmiş 2 sac
malzemeyi ele alalım. Birleşim yerlerinde boşluk olması
durumunda havuza dalış esnasında patlama riski çok
yüksektir. Bu şekilde kapalı hacimli parçalarda kaza
riskini sıfırlamak için muhakkak çapraz konumlu “akar
delik” denilen delikler açılmalıdır. Bu sayede hava
tahliyesi ve çinko akışı sağlanabilir. Alınması gereken
diğer bir önlem olarak da vincin havuza dalış hızının
ayarlanmasıdır. Bu gruptaki parçaların dalışı esnasında
vinç minimum hızına ayarlanmalıdır.
- Parçanın havuz içinde yüzme durumu: Diğer bir zorluk
ise radyatör gibi dar hacimli ve yoğunluğu düşük olan,
havuza daldırıldığında batmak yerine yüzme eğiliminde
olan parçalarda görülmektedir. 2.2 maddesindeki
durumun aksine burada deformasyonu önlemek için
yapılması gereken vincin hızlı hareket ettirilerek havuza
dalış yapılmasıdır. İhtiyaç duyulması halinde parçanın
yüzmesinin önüne geçebilmek için daha ağır
malzemeler ile birlikte askılama işlemi
gerçekleştirilebilir, askılanan parçaların havuzda kalış
sürelerinin yakın olması ve hacimlerinin havuza tek
seferde sığabilecek büyüklükte olması yeterlidir. Yüzme
dışında değerlendirmede dikkat edilmesi gereken diğer
bir husus da geniş yüzeyli metallerdeki çarpılma,
burulma riskidir.
- Süzülme kolaylığı: Çinko havuzundan çıkan parça
askıda bir süre bekletilerek çinkonun akışı, süzülmesi
beklenir. Ek işlem (eğe ile çinko akıntılarının
temizlenmesi) gerektiren süzülmenin zor gerçekleştiği
parçaların geometrisini karmaşık yapılı sayabiliriz.
Bu dört faktörün de birlikte değerlendirilmesi sonucu
ölçekte 1 numara en basit geometriye sahip ürünü
gösterirken, 10 numara ile geometrisi en karmaşık olan
ürün ifade edilmektedir.
Bu skalada:
1-3: Düzgün yüzeye sahip, açık ve küçük hacimli, hafif,
tek parçalı, girinti çıkıntısı olmayan, hazırlık süresi sıfır
ya da çok düşük olan, hiçbir şekilde zarar
verilemeyecek parçalardır. Örnek olarak şase, ızgara,
profil, tek sac parçalar, kolon, çöp konteynırı, köşebent,
kazan vb parçaları gösterebiliriz.
4-7: Üzerinde akar delik bulunmayan ancak kısa sürede
ve kolaylıkla delik açılabilecek, orta hacimde ve
ağırlıkta, çok fazla dikkat gerektirmeyen patlamadan
ziyade sadece çarpma ve burulma riskine göre askılama
işlemi gerektiren parçalardır. Örnek: filtre, korkuluk,
boru, metal kasa, beton kalıbı vb.
8-10: Büyük hacimli ve ağır, düzensiz yapılı, patlama
riski yüksek olan, hazırlık süresi oldukça uzun, çok
fazla dikkat gerektiren, üzerinde akar delik açılması zor
olan ve uzun süren parçalardır. Bu parçalara
radyatörleri, kaynakla birleştirilmiş sac malzemeleri ve
kapalı büyük hacimli parçaları örnek verebiliriz.
Bu parametredeki farklılıklar nihai ürün kalitesini direkt
olarak etkilediğinden ve eğer arzulanan kalite elde
edilemezse yeniden işlemeye gerek duyulacağından ve
bu da çinko sarfını arttıracağından modelde yer almıştır.
3.Parçanın pürüzlülük derecesi: Malzeme yüzeyindeki
pasın neden olduğu girinti çıkıntı durumunun
derecesidir. Yüzey pürüzlülüğü asit havuzunda
giderilmeye çalışılan bir faktördür. Ancak parçanın
asitte deforme olmaması için havuz içerisinde sadece
belirli bir süre tutulabilir. Bu nedenle bazı malzemeler
asit havuzundan çıktıktan sonra bile pürüzlü kalabilir.
Bu parametre de nihai ürünün kalitesini etkiler.
Yüzeydeki pürüzlülük arttıkça çinko parçaya daha kolay
tutunabileceğinden % Zn sarfiyatı da artacaktır.
Derecelendirme için kirlilik parametresi ile aynı olan
1-3 skalası yeterli görülmüştür.
1: Hiç pürüzsüz yüzeyler
2: Pürüzlü ancak asit havuzunda bu problemin
giderilebileceği yüzeyler
3: Çok pürüzlü, paslı parçalar. Bu probleme
malzemenin kendi yapısının sebep olabileceği gibi
imalat sırasında oluşan hadde bozuklukları, çizilmeler
vb. de sebep olabilir.
Yüzey durumunun derecelendirilmesi işleminin
malzeme kabulünden hemen sonra yapılması sağlıklı
olmayacağından flaks banyosunun hemen ardından
yüzey pürüzlülük derecesinin belirlenmesi istenmiştir.
Çünkü çıplak gözle yüzeyinin kusursuz olduğunu
düşündüğümüz bir parçanın asit havuzundan çıktığında
aslında kusurlu olan yapısı ortaya çıkabilir. Gerçekten
yüzeyi pürüzsüz olan bir parça da asit ya da flaks
havuzunda deforme olup yüzeyi bozulabilir ve çinko
sarfı artar. Aksi durum da mümkündür. Yani çok
pürüzlü bir parça asit havuzu çıkışında pürüzsüz hale
gelebilir.
4.Asit banyosu sıcaklığı: Asit banyosunda kimyasal
açıdan en önemli olan faktör sıcaklıktır.
5.Malzemenin asitte bekleme süresi: Asitte bekleme
süresi ise malzeme pürüzlülüğü derecesinin bir
fonksiyonu olarak düşünülebilir ve bu değere göre
değişkenlik gösterir.
6.Flaks banyosu değerleri: Asit banyosunda sadece
sıcaklık değerleri ölçülürken, flaks banyosunda ise pH
değeri ölçülmektedir.
7.Çinko banyosunun sıcaklığı: Çinko banyosunda
çeliğin türüne göre belirli bir değere kadar sıcaklık
arttıkça kaplama kalınlığı da artmakta; o değere
ulaştıktan sonra azalmaya başlamaktadır.
8.Çinko banyosunda bekleme süresi: Çinko havuzunda
bekleme süresi kalınlığa etki eden en önemli
faktörlerden biridir.

9.Askılama tipi: Askılama işlemi ürün üzerine delik
açılarak ya da mapa kaynatılarak yapılır. Ürünler ağırlık
merkezine göre 3 tipte askılama işlemine tabi tutulur.
Aksi takdirde ürün kendi ağırlığından dolayı deforme
olabilir. Askılama tipinde etkili olan diğer faktörler de
havuz boyutları ve süzülme kolaylığıdır.
a)Dik askılama işlemi: Parçalar askıya dik şekilde
yerleştirilir. Çinko akışının en kolay olduğu askılama
tipidir. Havuzdan çıkan parça üzerinden çinko
kolaylıkla ve kısa sürede süzülür. Bu nedenle bu tipte
askılama işlemi modelde 1 değeri ile ifade edilir.
b)Açılı askılama işlemi: Şekil 3’de görüldüğü üzere
parçalar askıyla belirli bir açı yapacak şekilde
yerleştirilirler. Modelde süzülme kolaylığına bakılarak 2
değeri ile ifade edilir.
Şekil 3. Açılı askılama işlemi
c)Yan askılama işlemi: Parçalar askıya paralel şekilde
yerleştirilir. Süzülmenin en zor olduğu ve en fazla
zaman aldığı göz önünde bulundurularak modelde 3
değeri ile temsil edilmiştir.
Kaplama kalınlığı 45 ile 288 mikron arasında değişen
farklı numunelerden veriler rassal zaman aralıklarında
işletmeye gidilerek işletme şefi ile birlikte sistematik
şekilde toplanmıştır. Bu verileri toplamak üzere
işletmede yeni bir veri takip formu oluşturulmuştur.
Toplamda doldurulan form sayısı 230’dur. Verileri en
genel şekilde 2 grupta toplayabiliriz: sayısal ve sözel
veriler. Sayısal olan veriler direk ölçüm yoluyla elde
ettiğimiz nicel değerlerdir. Sayısal veri grubu OEK,
banyo sıcaklığı, banyolarda bekleme süreleri, banyo
bileşimleri( pH, demir oranı, bome değeri) ve kaplama
kalınlığıdır. Sözel veriler ise uzman görüş yardımıyla
sınıflara ayrılmış ve her grubu temsil eden bir sayısal
değer belirlenerek bu verilerin nicel hale gelmesi
sağlanmıştır. Her vardiyada aynı uzman tarafından
veriler yorumlanarak çalışmada objektif bir
değerlendirme sağlanmıştır. Bu veriler ise fiziksel kalite
derecesi, parça geometrisi ve yüzey durumu, çinko
havuzunun kirlilik derecesi, askılama açısıdır.
b. YSA Mimarisinin Kurulması
Modelde değişken sayısının çok olması, değişkenlerin
birbirleriyle olan ilişkileri, bu ilişkilerin hangi dağılıma
ve fonksiyona uygunluk gösterdiği gibi sebepler çoklu
doğrusal regresyon modelinin sağlıklı sonuçlar
vermesine engel teşkil ettiğinden çözümde YSA
yöntemi kullanılmıştır. Uygulamada kullanılan bağımsız
değişkenler OEK, askılama tipi, parça geometrisi,
kirlilik derecesi, pürüzlülük derecesi, yağ banyosunun
sıcaklığı, pH’ı ve süresi, asit banyosunun sıcaklığı,
bomesi (gr/lt) ve süresi, flaksın sıcaklığı, pH’ı, bomesi,
demir oranı(gr/lt) ve süresi, çinko banyosu sıcaklığı,
süresi ve havuz kirlilik derecesidir. Toplanan diğer beş
veri türü ise tamamlayıcı bilgi niteliğindeki ölçüm
numarası, tarih, parti numarası, müşteri firma ve
malzeme cinsi olup sayısal modelde yer almamıştır.
Modelleme yapısı geri yayılım ileri beslemeli ( Back-
Propagation) yapay sinir ağıdır. Bu ağın tercih edilme
sebebi kullanımının kolay olması, üretimde tahmin
çalışmalarında en çok kullanılan model olması ve
doğrusal olmayan modellerdeki yüksek tahmin etme
başarısıdır. Verilerin program tarafından işleme
girmeden önce normalizasyonu gerçekleştirilmiş, veriler
[0,1] aralığına indirgenmiştir. Daha sonra verilerin
eğitimi ve testi için veriler ikiye bölünmüştür. 230
verinin 43’ü test verisi olarak belirlenmiştir.
Uygulamadaki bağımlı değişken ürünün kaplama
kalınlığıdır ve ağ mimarileri Şekil 4'de gösterilmiştir.
Şekil 4. YSA mimarisi
Kaplama kalınlığı için kurulan model; 9 girdi
değişkenli, tek ara katmanı olan, tek çıktıya sahip ileri
beslemeli geri yayılım ağıdır (Şekil 5). Ara katmandaki
işlemci eleman sayısı için çok sayıda deneme yapılarak
en uygun değer 10 olarak belirlenmiştir.
Toplama fonksiyonu modelde de işlemci elemanların
birleştirme fonksiyonu, ara katmandaki ve çıktı
katmanındaki transfer fonksiyonları hiperbolik tanjant
ve performans fonksiyonu da Hataların Kareli

Yapay Sinir Ağı Yaklaşımıyla Çinko Kalınlığının
Tahminlenmesi
T. Hatipoğlu, S. Boran, B. Özcan, A. Fığlalı
SAU J. Sci. Vol 17, No 1, p. 61-69, 2013 67
Ortalaması (Mean Squared Errors, MSE) olarak
belirlenmiştir.
Modelde kullanılacak fonksiyonlar seçildikten sonra
model eğitilmiştir. Bunun için başlangıç ağırlık
değerleri program tarafından rassal olarak atanmıştır.
Eğitim için 100 iterasyon kullanılmıştır.
Şekil 5 Kaplama kalınlığı için ağ yapısı
c. Modelin Sonuçları
Tahmin edilen değerlerin gerçekleşen değerlere ne
kadar yaklaştığını ölçmek için, aralarındaki sapma e(t)=
x(t) – f(t) şeklinde hesaplanır. Kullanılabilecek diğer bir
ölçüt ise hata yüzdesi p(t)= e(t) / x(t) ‘dir. Doğruluk
ölçütleri ve formülleri Tablo 1'de gösterilmiştir.
Tablo 1. Doğruluk ölçütleri ve formülleri
𝑀𝐸 =1
𝑛∑ 𝑒(𝑡)
Ortalama Hata
𝑀𝑆𝐸=1
𝑛∑[𝑒(𝑡)]
2
Hataların Kareli Ortalaması (MSE),
𝑅𝑀𝑆𝐸 = √1
𝑛∑[𝑒(𝑡)]2
Hataların Kareli Ortalaması Karekökü
(RMSE)
𝑀𝐴𝐸 =1
𝑛∑|𝑒(𝑡)|
Ortalama Mutlak Hata (MAE)
𝑀𝑃𝐸 =1
𝑛∑ 𝑝(𝑡)
Ortalama Yüzde Hata (MPE),
𝑀𝑆𝑃𝐸 =1
𝑛∑[𝑝(𝑡)]2
Ortalama Yüzde Hata Kareleri (MSPE)
𝑅𝑀𝑆𝑃𝐸 = √1
𝑛∑[𝑝(𝑡)]2
Ortalama Yüzde Hata Kareleri Kökü
(RMSPE)
𝑀𝐴𝑃𝐸 =1
𝑛∑|𝑝(𝑡)|
Ortalama Mutlak Yüzde Hata
(MAPE)
Önerilen model için hesaplanan yüzde doğruluk
değerleri aşağıdaki gibidir. (Tablo 2)
Tablo 2. Yüzde Doğruluk Ölçüt Değerleri
MPE MSPE RMSPE MAPE
Kaplama Kalınlığı
Modeli -0,0827 0,059544 0,244017 0,170922
Alınan örneklerin her biri için gerçek ve tahmin
değerleri arasındaki sapma grafik üzerinde
gözlemlenebilmektedir. (Şekil 6)
Şekil 6. Gerçek değerlerle tahmin değerlerinin karşılaştırılması
d. İstatistiksel Analiz
Yapay sinir ağından elde edilen değerler ile gerçek
değerler arasında anlamlı fark bulunup bulunmadığını
ölçmek için hipotez testi yapılmıştır. Bu karşılaştırmayı
yapabilmek için gerekli formüller ve elde edilen
değerler sırasıyla Tablo 3 ve Tablo 4'de verilmiştir.
Tablo 3. Büyük örnekler için Z testi
Boş Hipotez H0: 21
= Boş Hipotez
Test İstatistiği
2
22
1
21
)21(21
n
s
n
s
xxz
Alternatif Hipotez Red Alanı
Ha:21
> Boş Hipotez
eğer z > z kritik değer H0 red
(sağ kuyruk testi)
Ha: 21 < Boş Hipotez
eğer -z < -z kritik değer H0 red
(sol kuyruk testi)
Ha: 21 ≠ Boş Hipotez
Eğer z >z kritik değer veya
–z < -z kritik değer H0 red

Tablo 4. Kaplama kalınlığı için örnek değerleri
Kaplama için test istatistiğinin hesaplaması;
H0 = µ1- µ2 = 0
Ha = µ 1- µ2 ≠ 0
097902,0)2/22()1/
21(/))21()21((z nsnsXX
%95 Güven aralığında H0 kabul edilir. Bu durum,
istatistiksel anlamda gerçek verilerin ve tahmin edilen
verilerin arasında anlamlı bir fark olmadığını, her iki
örnek grubunun aynı yığından geldiğini; dolayısıyla
tahmin edilen verilerin gerçek verileri temsil edebilecek
yeterlilikte olduğunu göstermektedir.
4. SONUÇ
Yapay sinir ağları yöntemi günümüzde pek çok alanda
uygulanmakta ve tahmin modellerinde de başarılı
sonuçlar elde edilmektedir. YSA kullanımının kolay
olması, esnekliği, hızlı ve başarılı sonuçlar elde etme
yeteneğinden dolayı çalışmada bu yöntem tercih
edilmiştir.
Galvaniz sektöründe çinko sarfiyatı en önemli maliyet
kalemleri arasındadır. Bu yüzden bu sektörde
kullanılacak çinko miktarının en az olması gerekmekte,
ancak kalite açısından bakıldığında belli bir değerin
altında olması durumunda galvaniz kaplamadan
beklenen fonksiyonları sağlamadığı da görülmektedir.
Bu hedef değerin öznel değerlendirmeler yerine bilimsel
bir yöntemle belirlenmesi gereklidir. Bu eksikliğin
giderilmesi amacıyla birçok uygulama alanı olan YSA
uygun bir yöntem olarak kullanılmıştır. YSA modelinin
giriş parametrelerinin belirlenmesi amacıyla uzman
kişilerin görüşlerinden yararlanılmıştır. Çinko
kalınlığına etki eden dokuz parametre belirlenmiştir.
Kalite ve maliyet açısından istenilen hedef değerler
çoklu regresyon ve yapay sinir ağıyla tahmin edilmiştir.
Çoklu regresyon modeliyle elde edilen sonuçlar çok
düşük performansla çalıştığı, YSA modelinin ise işletme
için kullanılabilir sonuçlar elde ettiği görülmüştür.
YSA'dan elde edilen sonuçlara göre, gerçek değerler ve
tahmini değerler arasındaki farklar hipotez testiyle
istatistiksel olarak karşılaştırılmış ve %95 güven
aralığında iki değer arasında anlamlı bir fark olmadığı
ortaya konmuştur.
KAYNAKLAR
[1] ZHANG,Y.F.,Fuh,J.Y.H., A Neural Network
Approach For Early Cost Estimation Of
Packaging Products, Computers ind.Engng,
34(2), 433-450, 1998.
[2] KERMANSHAHİ, B., IWAMİYA, H., Up to
year 2020 load forecasting using neural nets,
Electrical power and energy systems, 24, 789-
797, 2002.
[3] CAVALİERİ,S., MACCARRONE,P.,
PİNTO,R., Parametric vs. neural
networkmodels for the estimation of
production costs: A case study in the
automotive industry, Int. J. Production
Economics, 91, 165-177, 2004.
[4] WANG, Q., Artificial neural networks as cost
engineering methods in a collaborative
manufacturing environment , Int. J. Production
Economics, 109, 53-64, 2007.
[5] GUNAYDIN ,H.M., DOGAN ,S.Z., A neural
network approach for early cost estimation of
structural systems of buildings, International
Journal of Project Management, 22, 595–602,
2004.
[6] PARAG C. PENDHARKAR, Scale economies
and production function estimation for object-
oriented software component and source code
documentation size, European Journal of
Operational Research, 172, 1040–1050, 2006.
[7] PİNO, R., PARRENO, J., GOMEZ, A., Priore,
P., Forecasting next-day price of electricity in
the Spanish energy market using artificial
neural Networks, Engineering Applications of
Artificial Intelligence, 21, 53-62, 2008.
[8] CAPUTO , A.C., PELAGAGGE, P.M.,
Parametric and neural methods for cost
estimation of process vessels, Int. J. Production
Economics, 112, 934–954, 2008.
[9] VERLINDEN, B.,Duflou, J.R., Collin,P.,
Cattrysse,D., Cost estimation for sheet metal
parts using multiple regression and artificial
neural networks: A case study, Int. J.
Production Economics, 111, 484–492, 2008.
[10] RESKOVIC S., GLAVAS Z., The Applıcatıon
Of An Artıfıcıal Neural Network For
Determınıng The Influence Of The Parameters
For The Deposıtıon Of A Zınc Coatıng On
Steel Tubes, Materıalı In Tehnologıje, 43(4),
201-205, 2009.
[11] ÖZTEMEL, E., Yapay Sinir Ağları, Papatya
Yayıncılık, İstanbul, 2006.
[12] HAYKIN, S., Neural Network a
Comprehensive Foundation, MacMillan
College Publishing, New Jersey, 1999.
Ortalama değer Standart sapma
Gerçek değerler
85,458
40,16832
Tahmin değerleri 84,81288 23,61217

Yapay Sinir Ağı Yaklaşımıyla Çinko Kalınlığının
Tahminlenmesi
T. Hatipoğlu, S. Boran, B. Özcan, A. Fığlalı
SAU J. Sci. Vol 17, No 1, p. 61-69, 2013 69
[13] FAUSETT, L., Fundamentals of Neural
Networks Architectures, Algorithms, and
Applications, Prentice-Hall, New Jersey, 1994.
[14] NABIYEV, V., Yapay Zeka Problemler-
Yöntemler-Algoritma, Seçkin Yayıncılık,
Ankara, 2005.
[15] TAEHO Jo, The effect of mid-term estimation
on back propagation for time series prediction,
Neural Computing and Applications, 19, 1237-
1250, 2010.
[16] GRAUPE, D., Principles of Artificial Neural
Networks (2ndEdition),World Scientific, 2007.
[17] BADRI, A., AMELI, Z., BIRJANDI, A.M.,
Application of Artificial Neural Networks and
Fuzzy logic Methods for Short Term Load
Forecasting, Energy Procedia, 14, 1883–1888,
2012.
[18] GUO, Z., ZHAO, W., LU, H., WANG, J.,
Multi-step forecasting for wind speed using a
modified EMD-based artificial neural network
model,Renewable Energy, 37(1), 241–249,
2012.
[19] ABHISHEK, K., SINGHA, M.P., GHOSH, S.,
ANAND, A., Weather forecasting model using
Artificial Neural Network, Procedia
Technology 4, 311 – 318, 2212-0173, 2012.
[20] DEHURI, S., ROY, R., CHO, S., Ghosh, A.
,An improved swarm optimized functional link
artificial neural network (ISO-FLANN) for
classification, The Journal of Systems and
Software, 85, 1333– 1345, 2012.
[21] GHIASSI, M., OLSCHIMKE, M., MOON, B.,
ARNAUDO, P., Automated text classification
using a dynamic artificial neural network
model, Expert Systems with Applications, 39(
12), 10967–10976, 2012.
[22] RAEESI, M., MORADZADEH, A.,
ARDEJANI, F.D., RAHIMI, M.,
Classification and identification of
hydrocarbon reservoir lithofacies and their
heterogeneity using seismic attributes, logs
data and artificial neural networks,Journal of
Petroleum Science and Engineering, Volumes
82–83, 151–165, 2012.
[23] EL-MıDANY , T.T., EL-BAZ , M.A., ABD-
ELWAHED, M.S., A proposed framework for
control chart pattern recognition in multivariate
process using artificial neural networks Expert
Systems with Applications, 37, 1035–104,
2010.


SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 71-74, 2013 SAU J. Sci. Vol 17, No 1, p. 71-74, 2013
71
Karboksinin gökkuşağı alabalıklarında (oncorhynchus mykiss) gulutatyon
redüktaz enzim aktivitesi üzerine etkisi
Gonca ALAK1*, Muhammed ATAMANALP2, Esat Mahmut KOCAMAN2, Arzu UÇAR2
1Atatürk Üniversitesi, Ziraat Fakültesi, Tarımsal Biyoteknoloji Bölümü, Erzurum
2Atatürk Üniversitesi, Su Ürünleri Fakültesi, Su Ürünleri Yetiştiriciliği Bölümü, Erzurum
18.10.2012 Geliş/Received, 20.01.2013 Kabul/Accepted
ÖZET
Karboksin tarımsal üretimde sıkça kullanılan bir fungusit olmasına rağmen balıklardaki toksisitesi üzerine yeterli
sayıda çalışma bulunmamaktadır.
Bu çalışmada karboksin gökkuşağı alabalıkları (Oncorhynchus mykiss) antioksidant savunma sistemleri üzerindeki
etkisinin belirlenmesi amaçlanmıştır. Balıklar 7 gün boyunca bu toksik bileşiğin 3,85 ppm’ lik dozuna maruz
bırakılmış ve karaciğerlerden alınan örneklerde antioksidan parametrelerinden glutatyon redüktaz (GR), enzimi
ölçümü yapılmıştır. Araştırma bulguları; karboksine maruz bırakılan gökkuşağı alabalıklarının karaciğerlerinde GR
aktivitesinin önemli oranda (p< 0.01) artırdığını ve bu türde oksidatif strese neden olduğunu göstermiştir.
Anahtar Kelimeler: karboksin, gökkuşağı alabalığı, toksisite, antioksidan enzim, GR
Effects of carboxın on glutathıone reductase enzyme actıvıty ın raınbow trout
(oncorhynchus mykiss)
ABSTRACT
Carboxin is one of the most widely used fungicides in agriculture, but information about toxicity on fish is limited.
This study assessed the effects of exposure to to carboxin on the antioxidant defence system of rainbow trout
(Oncorhynchus mykiss). The fish were exposed to carboxin (3,85 ppm) for seven days. And antioxidant parameter
(glutathione reductase, (GR)) was measured in hepar. The results indicated that carboxin exposure significantly
affected the activity of GR in fish hepar (p< 0.01). Thus, it was assumed that carboxin caused oxidative stress in
rainbow trout and GR enzyme played a role in protection against carboxin toxicity.
Keywords: carboxin, rainbow trout, toxicity, antioxidant enzyme, GR
* Sorumlu Yazar / Corresponding Author
G. Alak, M. Atamanalp, E. M. Kocaman, A. Uçar Effects Of Carboxin On Glutathione Reductase Enzyme
Activity İn Rainbow Trout (Oncorhynchus Mykiss)
72 SAU J. Sci. Vol 17, No 1, p. 71-74, 2013
1. INTRODUCTION
Carboxin (5,6-dihydro-2-methyl-N-phenyl-1,4-oxathiin-
3-Carboxamide) is a member of the oxathiin class of
systemic fungicides. It is applied to seed prior to planting
for control of various fungi that cause seed and seedling
diseases (smut, rot, and blight). Carboxin may be used to
prevent the formation of these diseases or may be used to
cure existing plant diseases. Its mode of action is to
selectively concentrate in fungal cells, where it inhibits
succinic dehydrogenase, a respiratory enzyme in the
mitochondria. It is available in a variety of formulations,
including wettable powder, dust, flowable concentrate,
emulsifiable concentrate, and ready-to-use liquid.
Carboxin is applied both by commercial seed treaters and
on-farm applicators [1].
Many environmental pollutants are capable of inducing
oxidative stress in aquatic animals [2]. Living things are
equipped with an antioxidant defense system (ADS) in
order to be protected against oxidative stress. Chemical
toxic pollutants are important sources of ROS in
biological systems and inhibits the activity of some
enzymes of the antioxidative defense system. Oxidative
stress and damage to fundamental biomolecules and to
antioxidant defenses of organisms are an established field
in environmental toxicology and ecotoxicology[3].
Antioxidant enzymes (Superoxide dismutase (SOD),
Glutathione peroxidase (GSH-Px), Glutathione-S-
Transferase (GST), glutathione reductase (GR), Catalase
(CAT)) play a vital role in the regulation of cellular
balance and their induction is the result of a reaction
against contaminants [4], while antioxidant enzyme
activities and lipid peroxidation are important indicators
in analysing cellular damage in toxicological studies
[5,6,7].
This study was planned with the aim of determining the
effect of carboxin on the antioxidant defense systems of
rainbow trout (Oncorhynchus mykiss) and contributing to
such studies.
2. MATERIALS AND METHODS
2.1.Fish and Carboxin
The rainbow trout (Oncorhynchus mykiss), were obtained
from Ataturk University, Fisheries Faculty (with an
average weight of 125 ± 15 g). They were acclimatized
for 28 days before the experiments. The spring water
used for the experiments had a temperature of 10±1°C,
total hardness of 102mg as CaCO3/l, dissolved oxygen
8±0.5 ppm and pH 7.8. The research platforms were 780
l fiberglass circular tanks (100cm diameter, 100cm
depth) with a constant and fresh water flow
(1.5L/minute-1) with no recirculation and under natural
light conditions.
The tanks were aerated with air pumps. Twenty-four fish
were placed into three tanks, two tanks for testing the
carboxin (seven fish per tank), and the other one for the
control group with ten fish.
Fish were exposed to a liquid form of carboxin at
concentrations of 3.85 ppm for seven days. Enzyme
measurement and lipid peroxidation assays were carried
out by separate experiments, using three fish in each (n =
6) group.
2.2. Biochemical analysis
Glutathione reductase (GR) activity was analysed from
rainbow trout tissues. Extracts from liver tissue was
prepared from each individual in according to Wiegand
[8] with a little modifications. To prepare the tissue
homogenates, tissues were ground with liquid nitrogen in
a mortar. The samples were homogenized by KH2PO4
(30mM, pH=7,3) buffer. And than homogenates were
centrifuged at 13000 rpm, 2 hours at 4 °C. These
supernatants were used for the determination of the
enzymatic activities. All results were referred to the
protein content in the samples. Protein content of each
homogenate was measured according to Bradford with
Coomassie brilliant blue G-250 using bovine serum
albumin as a standard. All values were analyzed by
Student’s t-test at the p < 0.01 level.
3. RESULTS AND DISCUSSION
In the present study, it was observed that there were
significant differences (p < 0.01) between the enzyme
activities determined in the control group at seven days
for GR enzyme activity. Carboxin increased the GR (EU
mg protein-1) activities in rainbow trout at seven days as
compared to the control values. The GR enzyme activity
of the fish in the treatment group (0,59±0,08EU mg
protein-1) was induced more compared to the control
group (0,26 ±0,03EU mg protein-1). These alterations
were found to be statistically significant (p< 0.01). When
the organism is exposed to oxidative stress, ADS can
react by increasing the synthesis of antioxidant enzymes
in this system. Within the parameters regarding ADS,
GSH level and the activities of GR and GST are useful
indicators for determining the environmental pollution in
aquatic organisms [4].
The result abouth GR activity in present research were
parallel to prior reports [9,10,11]. Nile tilapia
(Oreochromis niloticus), exposed to oxyfluorfen in
different concentrations (0.3 and 0.6 mg/L) and for
different periods (7, 14 and 21 days) and the CAT, SOD,

Effects Of Carboxin On Glutathione Reductase Enzyme
Activity İn Rainbow Trout (Oncorhynchus Mykiss)
G. Alak, M. Atamanalp, E. M. Kocaman, A. Uçar
SAU J. Sci. Vol 17, No 1, p. 71-74, 2013 73
GR and GST activities were analysed, and it was reported
that there was an increase in all groups [12]. The other
study with propiconazole (PCZ), rainbow trout (O.
mykiss) were exposed to the aforementioned fungicide
for different periods (7, 20 and 30 days) and at sublethal
concentrations (0.2, 50 and 500 µg/l), the oxidative stress
indicators (LPO and ROS) and antioxidant (SOD, CAT,
GR and GPx) enzyme activities were analyzed, in the 7-
day study, the antioxidant defense system reacted to this
effect with adaptation, and in the 20-day and 30-day
periods, high levels of oxidative stress indicators and
inhibition of the antioxidant enzymes were noticed; long
term exposure caused severe oxidative damage [13].
Figueiredo-Fernandes [14] looked into the effects of
paraquate (PQ), which was applied at different
temperatures 17 and 27 oC) as a single dose (0.5 mg L-
1), on the antioxidant enzymes of Nile tilapia (O.
niloticus) and it was noted that the aforementioned
herbicide increased the activities of SOD, GST and GR.
GR has a crucial role in the maintaining of GSH/GSSG
homeostasis under stress conditions, however it is not
involved in direct antioxidant defence in the same way as
the SOD activity[12].
In the organisms which are chronically exposed to
contaminants, the contaminants may accumulate in the
tissues and organs and in the long term, cause irreversible
molecular changes which have harmful effects. In the
light of the present and prior studies, the parameters
regarding the antioxidant defense system are considered
useful in determining the effects of environmental
pollution on aquatic organisms [15].
In this study, GR enzyme activitie was presented in I.
National Interdisciplinary Environmental Congress, 14 -
16 MAY 2012, SAKARYA
REFERENCES
[1] EPA. Environmental Protection Agency and Toxic
Substances September 2004.
[2] CEYHUN, S.B., ŞENTÜRK, M., EKİNCİ, D.,
ERDOĞAN, O., ÇİLTAŞ, A., KOCAMAN, E.M.,
Deltamethrin attenuates antioxidant defense system and
induces the expression of heat shock protein 70 in
rainbow trout, Comp. Biochem. Physiol., 152, 215, 2010.
[3] TALAS, Z.S., ORUN, I., OZDEMİR, İ.,
ERDOĞAN, K., ALKAN, A., YILMAZ, I.,
Antioxidative role of selenium against the toxic effect of
heavy metals (Cd+2, Cr+3) on liver of rainbow trout
(Oncorhynchus mykiss Walbaum 1792), Fish. Physiol.
Biochem., 34, 217, 2008.
[4]DOYOTTE, A., COSSU, C., JACQUIN, M.C.,
BABUTB, M., VASEURAL, P., Antioxidant enzymes,
glutathione and lipid peroxidation as relevant biomarkers
of experimental or field exposure in the gills and the
digestive gland of the freshwater bivalve unio tumidus,
Aquat. Toxicol., 39, 93, 1997.
[5]ZWART, L.L.D., MEERMAN, J.H.N.,
COMMANDEUR, J.N.M., VERMEULEN, N.P.E.,
Biomarkers of free radical damage applications in
experimental animals and in humans, Free Radıcal. Bıo.
Med., 27, 202, 1999.
[6] ORUÇ, E.Ö., SEVGİLER, Y., ÜNER, N., Tissue-
specific oxidative stress responses in fish exposed to 2,4-
D and azinphosmethyl, Comp. Biochem. Phys., 137, 43,
2004.
[7] ÇINKILOĞLU, E. Cyprinus carpio’da beyin
dokusunda fenthionun antioksidant savunma sistemi,
lipid peroksidasyonu ve asetilkolinesteraz enzim
aktivitesine n-asetilsistein modülatörlüğünde etkileri.
Çukurova Üniversitesi, Fen Bilimleri Enstitüsü. 2007.
[8] WIEGAND, C., KRAUSE, E., STEINBERG C.,
PFLUGMACHER, S., Toxicokinetics of atrazine in
embryos of the zebrafish (Danio rerio), Ecotoxicol.
Environ. Safe.. 49, 199, 2001.
[9]RAO,J.V.,Sublethaleffectsofanorganophosphorusinse
cticide (RPR- I)onbiochemical parametersoftilapia,
Oreochromis mossambicus, Comp.Biochem. Physiol.,
143,492, 2006.
[10] SETH, V., BANERJEE, B.D., CHAKRAVORTY,
A.K., Lipid peroxidation, free radical scavenging
enzymes, and glutathione redox system in blood rats
exposed to propoxur, Pestıc. Bıochem. Phys., 71, 133,
2001.
[11] JOS, A., PICHARDO, S., PRIETO, A.I.,
REPETTO, G., VAZQUEZ, C.M., MORENO, I.,
CAMEAN, A.M., Toxic cyanobacterial cells containing
microcystins induce oxidative stress in exposed tilapia
fish (Oreochromis sp.) under laboratory conditions,
Aquat. Toxicol., 72, 261, 2005.
[12] PEIXOTO, F., ALVES-FERNANDES, D.,
SANTOS, D., FONTAÍNHASFERNANDES, A.,
Toxicological Effects of Oxyfluorfen on Oxidative Stress
Enzymes in Tilapia Oreochromis niloticus. Pestıc.
Bıochem. Phys., 85, 91, 2006.
[13] LI, Z., ZLABEKA, V., GRABICA, R., LIA, P.,
MACHOVAA, J., VELISEKA, J., RANDAK, T., Effects
of exposure to sublethal propiconazole on the antioxidant
defense system and Na+– K+-ATPase activity in brain of
rainbow trout, Oncorhynchus mykiss, Aquat. Toxicol.,98,
297,2010.
[14]FIGUEIREDO-FERNANDES,A.,FONTAI´NHAS-
FERNANDES, A., PEIXOTO, F., ROCHA, E., REIS-
HENRIQUES, M.A., Effects of gender and temperature
on oxidative stress enzymes in Nile tilapia (Oreochromis
niloticus) exposed to paraquat, Pestıc. Bıochem. Phys.,
85, 97, 2006.
[15] LOPES, P.A., PINHEIRO, T., SANTOS, M.C.,
MATHIAS, M.D.L., COLLARESPEREIRA, M.J.,
VIEGAS-CRESPO, A.M., Response of antioxidant
G. Alak, M. Atamanalp, E. M. Kocaman, A. Uçar Effects Of Carboxin On Glutathione Reductase Enzyme
Activity İn Rainbow Trout (Oncorhynchus Mykiss)
74 SAU J. Sci. Vol 17, No 1, p. 71-74, 2013
enzymes in freshwater fish populations (Leuciscus
alburnoides) to inorganic pollutants exposure, Sci. Total
Environ., 280, 153, 2001.

SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 75-84, 2013 SAU J. Sci. Vol 17, No 1, p. 75-84, 2013
75
Bulanık çok yanıtlı deneyler için bulanık pareto çözüm kümesinin bulanık
ilişkiye dayalı siniflandirma yaklaşimi ile değerlendirilmesi
Özlem Türkşen1*, Ayşen Apaydın1
1Ankara Üniversitesi, Fen Fakültesi, İstatistik Bölümü, 06100, Tandoğan, Ankara
20.11.2012 Geliş/Received, 25.12.2012 Kabul/Accepted
ÖZET
Çok yanıtlı bir deneyin çözüm kümesi Pareto çözüm kümesi ile karakterize edilir. Bu çalışmada, çok yanıtlı deney
bulanık çerçevede ele alınmıştır. Yanıtlar ve model parametreleri, veri setindeki belirsizliği tanımlayan üçgensel
bulanık sayılar olarak göz önünde bulundurulmuştur. Modelleme ve optimizasyon için sırasıyla bulanık en küçük
kareler yaklaşımı ve bulanık uyarlanmış BSGA-II (BBSGA-II) kullanılmıştır. Elde edilen bulanık Pareto çözüm
kümesi, bulanık ilişkili sınıflandırma yaklaşımı kullanılarak gruplandırılmıştır. Böylece, daha iyi karar verebilmek
için alternatif çözümlerin seçimi kolaylaştırılmıştır. Bulanık yanıt değerlerinden oluşan gerçek bir veri seti uygulama
olarak kullanılmıştır.
Anahtar Kelimeler: Bulanık çok yanıtlı problem, bulanık modelleme, bulanık BSGA-II, bulanık Pareto çözüm
kümesi, bulanık ilişkili sınıflandırma.
Evaluatıon of fuzzy pareto solutıon set by usıng fuzzy relatıon based clusterıng
approach for fuzzy multı-response experıments
ABSTRACT
The solution set of a multi-response experiment is characterized by Pareto solution set. In this paper, the multi-
response experiment is dealed in a fuzzy framework. The responses and model parameters are considered as
triangular fuzzy numbers which indicate the uncertainty of the data set. Fuzzy least square approach and fuzzy
modified NSGA-II (FNSGA-II) are used for modeling and optimization, respectively. The obtained fuzzy Pareto
solution set is grouped by using fuzzy relational clustering approach. Therefore, it could be easier to choose the
alternative solutions to make better decision. A fuzzy response valued real data set is used as an application.
Keywords: Fuzzy multi-response problem, fuzzy modeling, fuzzy NSGA-II, fuzzy Pareto solution set, fuzzy
relational clustering.
* Sorumlu Yazar / Corresponding Author

Ö. Türkşen, A. Apaydın Evaluation Of Fuzzy Pareto Solution Set By Using Fuzzy Relation
Based Clustering Approach For Fuzzy Multi-Response Experiments
76 SAU J. Sci. Vol 17, No 1, p. 75-84, 2013
1. INTRODUCTION
The analysis of data from a multi-response experiment,
in which a number of responses are measured
simultaneously, requires a careful consideration because
of the multiple response nature of the data. It is often
hard to find an optimal setting of the input variables that
provide the best compromise of the multiple responses
simultaneously which is called multi-response problem.
In general, a multi-response problem is evaluated in two
stages which are modeling and optimization. Response
surface methodology (RSM) is widely used for
modeling and optimizing the multi-response problems
[1-3]. The optimization stage is specifically called
multi-response optimization (MRO). In order to obtain
compromise solution set for multi-response problems,
the decision making stage can be considered as the third
stage to make better decision for the process.
The solutions of multi-response problems are mainly
depend on an approximating model of the unknown
responses. The approximating model is based on an
observed data from the process or system collected via a
multi-response experiment. Sometimes, however, it is
not possible to get exact numerical data because of the
complexity of the process. In fact, there are many cases
where observations cannot be known or quantified
exactly, and thus, it is possible to provide an
approximate description of them, or interval as close
them. And also, it can be difficult to find a probability
distribution of the responses in some situations. In
recent years, fuzzy sets, firstly introduced in [4], has
been used for modeling systems which are non-linear,
complex, ill-defined and not well understood due to its
ease of implementation, flexibility, tolerant nature to
imprecise data, and ability to model non-linear behavior
of arbitrary complexity [5]. The fuzzy set theory has
found many applications in multi-response problems. In
the studies of [6-9], fuzzy models are generated using if-
then fuzzy-rule based reasoning for tackling MRO. A
fuzzy modeling approach is proposed to optimize dual
response systems in [10]. In [11-12], fuzzy regression
models based on replicates of responses are constituted
and a fuzzy programming method is expressed to solve
the problem. In [13], a fuzzy regression model based on
possibility distribution is used and a fuzzy MRO
procedure is proposed to search an appropriate
combination of process parameter setting. In [14],
second order response surface model in fuzzy setting
has been derived for the modeling of the responses.
In this paper, the uncertainties of the collected data are
inserted into the modeling of the unknown responses by
means of fuzzy model coefficients. Firstly, fuzzy least
square method with Diamond’s distance metric is used
to compose the fuzzy response models in which the
response values and model coefficients are assumed as
triangular fuzzy numbers and input variables are
considered crisp. Secondly, multi-response problem
with fuzzy responses is considered as a multi-objective
optimization (MOO) problem with fuzzy objectives. In
order to achieve the optimization, without
dimensionality reduction of the objectives, a well-
known multi-objective algorithm, Non-dominated
Sorting Genetic Algorithm-II (NSGA-II), is used with
the modification of centroid index based fuzzy ranking
approach which makes easier to decide the domination
status between the fuzzy solutions. As a result, fuzzy
Pareto solution set is obtained by using proposed fuzzy
NSGA-II (FNSGA-II) which is firstly introduced in [15-
17]. Hence, a bigger objective space could be provided
with the fuzzy response values which bring flexibility to
the decision maker.
The evaluation of the solutions can be considered as a
final stage to make decision for the process. Since the
fuzzy Pareto solution set can have extremely large
number of solutions, the analysis of the fuzzy Pareto
solution set can provide better decision process. This
method is based on clustering methods. Recently, fuzzy
clustering approach is used for the evaluation of Pareto
solutions in the multi-objective framework. In [18],
NSGA-II is used to obtain Pareto solution set and the
solution set is clustered by using Fuzzy C-Means
(FCM), a fuzzy clustering approach, on a calibration
problem. Similarly in [19], NSGA-II is used for
optimization and two fuzzy clustering methods, FCM
and FLVQ (Fuzzy Learning Vector Quantization), are
used for clustering of the Pareto solution set of an
economic emission dispatch problem. In this work,
since there are some difficulties to define the optimal
cluster numbers, fuzzy relation based clustering
approach [20] is used to cluster the fuzzy Pareto
solution set. A case study in food engineering is used as
an application.
This paper is organized as follows. Section 2 presents a
brief description about fuzzy modeling, fuzzy MOO
problem and some explanations about fuzzy set theory.
Section 3 contains fuzzy clustering definitions and
information about fuzzy relational clustering approach
for fuzzy Pareto solution set. In Section 4, modeling,
optimization and clustering approaches are applied on a
fuzzy response valued data set in food engineering field
and the results are given. Some conclusions are
presented in Section 5.

Evaluation Of Fuzzy Pareto Solution Set By Using Fuzzy Relation
Based Clustering Approach For Fuzzy Multi-Response Experiments Ö. Türkşen, A. Apaydın
SAU J. Sci. Vol 17, No 1, p. 75-84, 2013 77
2.MODELING AND OPTIMIZING OF A FUZZY
MULTI-RESPONSE PROBLEM
Assume that the multi-response problem involves fuzzy
responses , 1,2,...,jY j r which depend on the given
k input variables 1 2, ,...., kX X X . Each fuzzy
response variable is considered as a triangular fuzzy
number and denoted as , ,t t t t t tY Y Y Y Y Y ,
1,2,...,t n , in which tY and tY are left and right
spreads, respectively. The input variables are considered
crisp numbers and n denotes the number of
experiments.
The relation between inputs and responses can be
defined with a polynomial regression model which is
used as an approximation function to an unknown
response surface. Taking into account that the response
surface problems have non-linear structure, second
order polynomial models have an important place in the
modeling strategy of the responses [2]. The second
order predicted fuzzy response surface model can be
written in the form
20 1 1 1
ˆ,
1,2,..., , 1,2,..., 1
k k k kt t t tt i i ii i ij i ji i i i j
Y X X X X
t n s r
where 0 , , ,i ii and ij are triangular fuzzy numbers,
denoting , ,i i i i i i and
, ,ij ij ij ij ij ij where ,i ij are center
values with left spreads ,i ij and right spreads
,i ij . The modeling error is incorporated into the
fuzzy model coefficients, 0 , , ,i ii ij β instead of
random error term. The main aim of the fitting is to
determine the fuzzy coefficients with the minimization
of the distances, d , between the observed and predicted
fuzzy response values. Hence, the minimization
problem can be defined as
2
1
ˆmin min , .
n
t ttd Y Y
β (2)
The fuzzy least square (FLS) method with the
Diamond’s distance metric [21] is used and the
optimization problem is transformed into
2
1
2 ' ' '
1
22 '
1
22
' ' ' '
ˆmin min ,
min , , , , ,
min 3
n
D t tt
n
D t t t t t tt
n
D t tt
t t t t t t t t
d Y Y
d Y Y Y
d Y
Y Y Y Y
β
X β X β X β
X β
X β X β X β X β
in which fuzzy parameters are defined in a vector form,
, , β β β β β β . Assuming '
1
n
t tt X X
is non-
singular, the parameter values are given by
1'
1 1
1'
1 1
1'
1 1.
n n
t t t tt t
n n
t t t tt t
n n
t t t tt t
Y
Y
Y
β X X X
β X X X
β X X X
(4)
The parameter vector, 0 , , ,i ii ij β , can be
easily obtained by using (4). Hence, a multi-response
problem is converted to a fuzzy multi-response problem
with fuzzy response functions.
Since the multi-response problems often involve
incommensurate and conflicting responses, it is
necessary to take into account all responses
simultaneously to obtain satisfactory compromise
solution set. Therefore, a fuzzy MRO problem can be
formulated as following
1 2ˆ ˆ ˆ
, ,...,
. .
roptimize Y Y Y
s t S
X X X
X (5)
where ˆjY X denotes the j th fuzzy response,
1,2,...,j r , X is an input vector, and S is an
experimental region. By using (5), a fuzzy MOO
problem can be formulated as
1 2, ,...,
. . .roptimize f f f
s t S
X X X
X (6)
where each , 1,2,...,jf j r represents fuzzy response
function as a fuzzy objective function. In order to
optimize the fuzzy MOO given in (6), fuzzy modified
NSGA-II (FNSGA-II) is used. The FNSGA-II is created

Ö. Türkşen, A. Apaydın Evaluation Of Fuzzy Pareto Solution Set By Using Fuzzy Relation
Based Clustering Approach For Fuzzy Multi-Response Experiments
78 SAU J. Sci. Vol 17, No 1, p. 75-84, 2013
by the modification of NSGA-II with centroid index
based fuzzy ranking approach. The detailed explanation
and algorithmic steps of the FNSGA-II are given in
[15]. The solution set of the (6) is composed of fuzzy
non-dominated solutions which are represented by
triangular fuzzy numbers denoted as , ,l c uf f f f
shown in Figure 1.
The fuzzy number is a subset of the real line R with the
membership function f
is defined as
,
1 ,
,
0 ,
L l ct tf
ct
f R c ut tf
x f x f
x fx
x f x f
otherwise
(7)
where l
l
c lf
x fx
f f
and
uu
u cf
f xx
f f
.
A fuzzy number can be represented as a family of sets
called -level set. Let f denotes the -level set
defined as
:f
f x R x (8)
where f
x is given in (7). Every -cut of a fuzzy
number is a closed interval, defined as ,L Uf f f
where inf :L
ff x R x and
sup :U
ff x R x
[22]. Assume that the
fuzzy MOO problem involves two fuzzy objective
functions. The -cut representation of a fuzzy non-
dominated solution for this problem will be a
rectangular as in Figure 2. The Figure 2 shows a
triangular fuzzy solution, obtained for several -cut
values, e.g. 0;0.80;1 . It is clear from the Figure 2
that if the -cut values gets closer to 1, the fuzzy non-
dominated solution becomes crisp valued.
3. EVALUATING OF THE FUZZY PARETO
SOLUTION SET WITH A FUZZY CLUSTERING
APPROACH
The fuzzy Pareto set consists of many fuzzy non-
dominated solutions. Each solution can be considered an
important element of fuzzy set since it gives a different
solution options for the decision making analysis. It is
most common that the fuzzy Pareto set can be
composed of similar valued fuzzy solutions. A decision
maker can need to determine the reasonable Pareto
solution groups which have the similar fuzzy values.
Hence, a grouped set will have some alternative
solutions and the dimension of solution set will be
reduced which helps for decision making. It can be
easily said that the grouping of fuzzy Pareto solutions
can be derived as a fuzzy clustering problem.
3.1 Fuzzy Clustering
In a clustering problem, the main goal is determining
the optimal number of clusters. The fuzzy clusterings
can be roughly divided into two categories. One
category, based on objective functions, is an effective
and studied popularly in the literature. Fuzzy C-Means
(FCM) algorithm is one of the most popular objective
function based fuzzy clustering algorithm which is first
developed by [20] and improved by [23]. The FCM
algorithm has many assumptions for the data set. It can
perform well only when the clusters in the data have
approximately the same size and shape. It has difficulty
in discovering small clusters. Many algorithms have
been developed to solve these problems which are
Gustafson-Kessel (GK) algorithm [24], adaptive fuzzy
c-varieties (AFC) algorithm [25], and fuzzy clustering
with volume prototypes algorithm [26] which extends
f
1
x lf cf uf
Figure 1. A triangular fuzzy number f
0.80
1f
1f
x 1
0
Figure 2. Representation of a triangular fuzzy solution on an objective
space with the -cut values

Evaluation Of Fuzzy Pareto Solution Set By Using Fuzzy Relation
Based Clustering Approach For Fuzzy Multi-Response Experiments Ö. Türkşen, A. Apaydın
SAU J. Sci. Vol 17, No 1, p. 75-84, 2013 79
FCM and GK algorithm with volume prototypes [27].
Most of the proposed algorithms use cluster validity
measure such as the compactness of the clusters [28].
Since in different data set clusters can be of different
shapes, sizes and densities, it is difficult to devise a
unique measure that is suitable for all different cases.
Moreover, these procedures are computationally
expensive because they require solving the optimization
problems repeatedly for different values of the number
of clusters over a pre-specified range.
Another category is based on a relation matrix such as
correlation coefficient, equivalence relation, similarity
relation, and fuzzy relation, etc. [29]. In this type of
fuzzy clustering, the clustering starts with a large number of clusters and the compatible clusters are
iteratively merged until the correct number of clusters
are determined [26]. Clusters can be merged in several
ways.
One of the merging method is based on fuzzy relational
clustering which is used in this study. In fuzzy relational
clustering method, a matrix of similarity measures is
converged to a solution by employing the well-known
max-min composition several times. A threshold value
is used for merging the clusters. After cluster merging
one has obtained the optimal number of clusters [20,
30].
3.2 Fuzzy Relational Clustering for Fuzzy Pareto
Solution Set
Assume that the fuzzy Pareto solution set contains n
number of fuzzy non-dominated solutions. A similarity
relation between the fuzzy solutions is obtained in two
steps: First, a n n fuzzy compatibility relation matrix
S is calculated. The elements ijS of S are given by
,
0 ,
i j
ij i j
s A Bi j
S s A B
i j
(9)
where , 1,2,...,i j n ; iA and jB are the fuzzy solutions
in the fuzzy Pareto set defined by -cut values shown
with rectangular in Figure 3. The and operators,
given in Equation (9), are the intersection and the union,
respectively.
The i js A B , , 1,2,...,i j n denotes the similarity
between two fuzzy solutions by the calculation of
intersection area. Hence, ijS reflects the closeness
amount between the two fuzzy solutions. The similarity
value 0,1ijS . The compatibility matrix S is
symmetric and diagonal elements of S are equal to 1
by definition. The next step is to determine which
solutions one to be merged, given the similarity matrix
S . This is done by using the fuzzy relational clustering
method. In this method, the matrix S is converged to a
solution by employing the max-min composition several
times. When max-min composition and the max
operator for set union are used, the resulting matrix is
called transitive max-min closure. The transitive closure
of a fuzzy relation S is the smallest relation that is
transitive and contains S . Given a fuzzy relation S , its
max-min transitive closure TS can be calculated by
using the following iterative algorithm.
1. Let 0
TS S
2. Repeat for iteration number 1,2,...l
1 1 1l l l l
TS S S S
until 1l l
T TS S
where denotes the max-min composition of fuzzy
relations [31]. The transitive matrix, TS , indicates the
groups of solutions that are similar at least to the degree
denoted by the matrix elements. The matrix TS is
thresholded with pre-determined and problem
dependent threshold value 0,1 . Hence, the
groups of solutions that need to be merged are
identified.
2y
2t
1y
1t
1f
B
A
1x 1z 2x 2z
2f
Figure 3. Representation of two fuzzy non-dominated solutions with
rectangulars
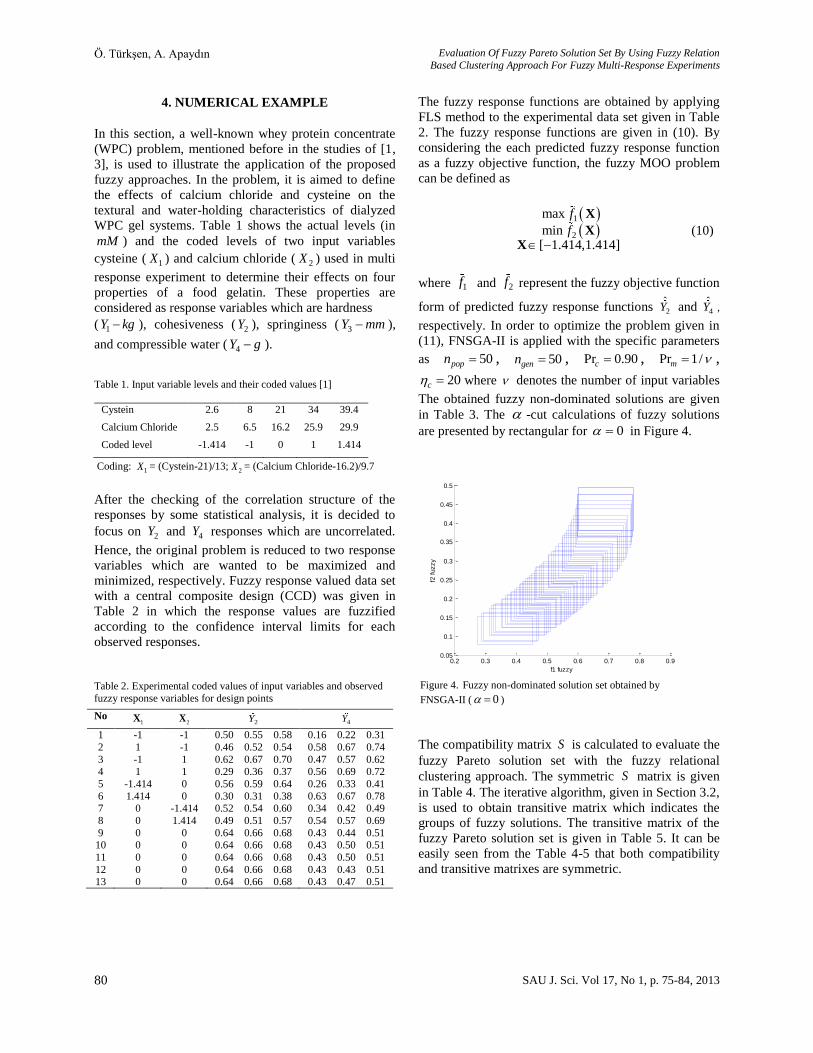
Ö. Türkşen, A. Apaydın Evaluation Of Fuzzy Pareto Solution Set By Using Fuzzy Relation
Based Clustering Approach For Fuzzy Multi-Response Experiments
80 SAU J. Sci. Vol 17, No 1, p. 75-84, 2013
4. NUMERICAL EXAMPLE
In this section, a well-known whey protein concentrate
(WPC) problem, mentioned before in the studies of [1,
3], is used to illustrate the application of the proposed
fuzzy approaches. In the problem, it is aimed to define
the effects of calcium chloride and cysteine on the
textural and water-holding characteristics of dialyzed
WPC gel systems. Table 1 shows the actual levels (in
mM ) and the coded levels of two input variables
cysteine ( 1X ) and calcium chloride ( 2X ) used in multi
response experiment to determine their effects on four
properties of a food gelatin. These properties are
considered as response variables which are hardness
( 1Y kg ), cohesiveness ( 2Y ), springiness ( 3Y mm ),
and compressible water ( 4Y g ).
Table 1. Input variable levels and their coded values [1]
Cystein 2.6 8 21 34 39.4
Calcium Chloride 2.5 6.5 16.2 25.9 29.9
Coded level -1.414 -1 0 1 1.414
Coding: 1X = (Cystein-21)/13; 2X = (Calcium Chloride-16.2)/9.7
After the checking of the correlation structure of the
responses by some statistical analysis, it is decided to
focus on 2Y and 4Y responses which are uncorrelated.
Hence, the original problem is reduced to two response
variables which are wanted to be maximized and
minimized, respectively. Fuzzy response valued data set
with a central composite design (CCD) was given in
Table 2 in which the response values are fuzzified
according to the confidence interval limits for each
observed responses.
Table 2. Experimental coded values of input variables and observed
fuzzy response variables for design points
The fuzzy response functions are obtained by applying
FLS method to the experimental data set given in Table
2. The fuzzy response functions are given in (10). By
considering the each predicted fuzzy response function
as a fuzzy objective function, the fuzzy MOO problem
can be defined as
1
2
max
min[ 1.414,1.414]
f
f
X
XX
(10)
where and represent the fuzzy objective function
form of predicted fuzzy response functions and ,
respectively. In order to optimize the problem given in
(11), FNSGA-II is applied with the specific parameters
as 50popn , 50genn , Pr 0.90c , Pr 1/m ,
20c where denotes the number of input variables
The obtained fuzzy non-dominated solutions are given
in Table 3. The -cut calculations of fuzzy solutions
are presented by rectangular for 0 in Figure 4.
The compatibility matrix S is calculated to evaluate the
fuzzy Pareto solution set with the fuzzy relational
clustering approach. The symmetric S matrix is given
in Table 4. The iterative algorithm, given in Section 3.2,
is used to obtain transitive matrix which indicates the
groups of fuzzy solutions. The transitive matrix of the
fuzzy Pareto solution set is given in Table 5. It can be
easily seen from the Table 4-5 that both compatibility
and transitive matrixes are symmetric.
1f 2f
2ˆ
Y 4ˆ
Y
0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
f1 fuzzy
f2 f
uzzy
No 1X
2X 2Y 4Y
1
2
3
4
5
6 7
8
9 10
11
12 13
-1
1
-1
1
-1.414
1.414 0
0
0 0
0
0 0
-1
-1
1
1
0
0 -1.414
1.414
0 0
0
0 0
0.50 0.55 0.58
0.46 0.52 0.54
0.62 0.67 0.70
0.29 0.36 0.37
0.56 0.59 0.64
0.30 0.31 0.38 0.52 0.54 0.60
0.49 0.51 0.57
0.64 0.66 0.68 0.64 0.66 0.68
0.64 0.66 0.68
0.64 0.66 0.68 0.64 0.66 0.68
0.16 0.22 0.31
0.58 0.67 0.74
0.47 0.57 0.62
0.56 0.69 0.72
0.26 0.33 0.41
0.63 0.67 0.78 0.34 0.42 0.49
0.54 0.57 0.69
0.43 0.44 0.51 0.43 0.50 0.51
0.43 0.50 0.51
0.43 0.43 0.51 0.43 0.47 0.51
Figure 4. Fuzzy non-dominated solution set obtained by
FNSGA-II ( 0 )

Evaluation Of Fuzzy Pareto Solution Set By Using Fuzzy Relation
Based Clustering Approach For Fuzzy Multi-Response Experiments Ö. Türkşen, A. Apaydın
SAU J. Sci. Vol 17, No 1, p. 75-84, 2013 81
2 1 2
2 21 2 1 2
4
ˆ( ) (0.6373,0.6600,0.6826) ( 0.092, 0.092, 0.092) ( 0.0103, 0.0103, 0.0103)
( 0.0956, 0.0956, 0.0956) ( 0.0581, 0.0581, 0.0581) ( 0.07, 0.07, 0.07)
ˆ( ) (0.4250,0.4680,0.5110) (0.1
Y X X
X X X X
Y
X
X 1 2
2 21 2 1 2
294,0.1314,0.1354) (0.0727,0.0728,0.0729)
(0.0095,0.0260,0.0425) (0.007,0.0235,0.04) ( 0.0825, 0.0825, 0.0825) .
X X
X X X X
(11)
Table 3. The fuzzy non-dominated solution set obtained by FNSGA-II and input variable values
Number 1f 2f x
1
2 3
4
5
6
7
8 9
10
11 12
13 14
15
16 17
18
19 20
21
22 23
24
25 26
27
28 29
30
31 32
33
34 35
36
37 38
39
40 41
42
43 44
45
46 47
48
49 50
0.2749 0.3574 0.4517
0.2898 0.3723 0.4666 0.2945 0.3770 0.4713
0.3161 0.3986 0.4929
0.3225 0.4050 0.4993
0.3286 0.4111 0.5054
0.3345 0.4170 0.5113
0.3522 0.4347 0.5290 0.3549 0.4374 0.5317
0.3675 0.4500 0.5443
0.3725 0.4550 0.5493 0.3810 0.4635 0.5578
0.3863 0.4688 0.5631 0.3946 0.4771 0.5714
0.4014 0.4839 0.5782
0.4115 0.4940 0.5883 0.4135 0.4960 0.5903
0.4209 0.5034 0.5977
0.4232 0.5057 0.6000 0.4319 0.5144 0.6087
0.4378 0.5203 0.6146
0.4428 0.5253 0.6196 0.4510 0.5335 0.6278
0.4582 0.5407 0.6350
0.4642 0.5467 0.6410 0.4672 0.5497 0.6440
0.4761 0.5586 0.6529
0.4829 0.5654 0.6597 0.4892 0.5717 0.6660
0.5036 0.5861 0.6804
0.5062 0.5887 0.6830 0.5142 0.5967 0.6910
0.5203 0.6028 0.6971
0.5296 0.6121 0.7064 0.5372 0.6197 0.7140
0.5511 0.6336 0.7279
0.5531 0.6356 0.7299 0.5582 0.6407 0.7350
0.5639 0.6464 0.7407
0.5718 0.6543 0.7486 0.5769 0.6594 0.7537
0.5805 0.6630 0.7573
0.5860 0.6685 0.7628 0.5936 0.6761 0.7704
0.5962 0.6787 0.7730
0.5987 0.6812 0.7755 0.6016 0.6841 0.7784
0.6016 0.6841 0.7784
0.6026 0.6851 0.7794 0.6027 0.6852 0.7795
0.0788 0.1133 0.1532
0.0863 0.1210 0.1610 0.0892 0.1239 0.1641
0.1001 0.1348 0.1750
0.1045 0.1396 0.1803
0.1080 0.1432 0.1839
0.1117 0.1472 0.1881
0.1213 0.1569 0.1981 0.1225 0.1579 0.1987
0.1301 0.1657 0.2068
0.1341 0.1696 0.2105 0.1389 0.1746 0.2159
0.1416 0.1777 0.2193 0.1470 0.1832 0.2249
0.1518 0.1880 0.2299
0.1583 0.1948 0.2370 0.1598 0.1970 0.2399
0.1639 0.2010 0.2438
0.1655 0.2028 0.2457 0.1715 0.2088 0.2517
0.1756 0.2130 0.2561
0.1809 0.2183 0.2613 0.1846 0.2227 0.2666
0.1901 0.2286 0.2730
0.1985 0.2365 0.2803 0.2020 0.2401 0.2840
0.2033 0.2425 0.2875
0.2090 0.2480 0.2929 0.2141 0.2534 0.2986
0.2281 0.2679 0.3137
0.2312 0.2711 0.3170 0.2383 0.2786 0.3250
0.2398 0.2810 0.3284
0.2485 0.2904 0.3384 0.2560 0.2980 0.3463
0.2704 0.3136 0.3631
0.2727 0.3161 0.3659 0.2789 0.3228 0.3733
0.2858 0.3299 0.3806
0.2961 0.3412 0.3928 0.3036 0.3492 0.4015
0.3094 0.3554 0.4082
0.3189 0.3661 0.4202 0.3353 0.3835 0.4389
0.3436 0.3925 0.4484
0.3519 0.4015 0.4584 0.3653 0.4166 0.4754
0.3650 0.4162 0.4749
0.3809 0.4336 0.4939 0.3810 0.4336 0.4939
2.6180 2.4842
2.7220 2.9779 2.9469 2.9770
2.6180 4.1274
3.4409 3.7074
3.5683 3.8567
3.8777 3.8558
3.9245 4.5765 3.2017 5.3059
3.4968 5.6251
2.8871 6.3904 3.3369 6.3991
4.0129 6.0674 4.0363 6.4496
3.8569 6.9433
4.1637 7.1897 5.7809 5.9442
5.2882 6.7202
5.5261 6.6436 4.9697 7.5641
5.1179 7.7600
4.4796 8.6020 6.3256 7.4875
6.8677 7.4661
4.6395 9.7320 4.5017 10.0560
7.3214 8.1665
6.3698 9.3644 6.5518 9.6234
6.3503 10.7990
6.2736 11.0648 6.5401 11.4218
8.8645 9.9328
9.3390 10.2917 8.9841 11.1890
9.9526 11.6759
10.2139 11.6759 10.8171 11.7409
10.1879 12.7924
10.8782 13.1872 11.0641 13.6916
11.1746 14.1038
12.5136 14.0272 12.1600 15.6578
11.9884 16.4270
12.3459 16.9071 13.5562 17.4096
13.5237 17.3941
13.6680 18.6328 13.5094 18.7084

Ö. Türkşen, A. Apaydın Evaluation Of Fuzzy Pareto Solution Set By Using Fuzzy Relation
Based Clustering Approach For Fuzzy Multi-Response Experiments
82 SAU J. Sci. Vol 17, No 1, p. 75-84, 2013
Table 4. Compatibility matrix of fuzzy non-dominated solutions
Number of
solutions
1 2 3 4 5 6 ... 48 49 50
1 1 0.69744 0.61589 0.3751 0.31051 0.26485 ... 0 0 0
2 1 0.87683 0.53029 0.44088 0.37873 ... 0 0 0
3 1 0.6001 0.49892 0.42911 ... 0 0 0
4 1 0.8211 0.70324 ... 0 0 0
5 1 0.85238 ... 0 0 0
6 1 ... 0 0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
48 1 0.72214 0.72067
49 1 0.99799
50 1
Table 5. Transitive matrix of fuzzy non-dominated solutions
Number of
solutions
1 2 3 4 5 6 ... 48 49 50
1 1 0.69744 0.69744 0.6001 0.6001 0.6001 ... 0.6001 0.6001 0.6001
2 1 0.87683 0.6001 0.6001 0.6001 ... 0.6001 0.6001 0.6001
3 1 0.6001 0.6001 0.6001 ... 0.6001 0.6001 0.6001
4 1 0.8211 0.8211 ... 0.61474 0.61474 0.61474
5 1 0.85238 ... 0.61474 0.61474 0.61474
6 1 ... 0.61474 0.61474 0.61474
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
48 1 0.72766 0.72766
49 1 0.99799
50 1
Table 6. Clustering results of the fuzzy non-dominated solutions for different threshold values
No 0.6 0.70 0.75 0.80 0.85 0.90 1
1
2
3
4
5
6
7
{1,2,…,50} {1}
{2,3}
{4,5,6,7}
{8,9,…,29}
{30,31,…,35}
{36,37,…,43}
{44,45,…,50}
{1}
{2,3}
{4,5,6,7}
{8,9}
{10,11,…,29}
{30,31,32,33}
{34,35}
{36,37,38,39}
{40,41,42,43}
{44,45,46}
{47,48}
{49,50}
{1}
{2,3}
{4,5,6,7}
{8,9},
{10,11},
{12,13}, {14,15},
{16,17,18,19},
{20,21,…,24},
{25,26,…,29}
{30,31},{32,33},
{34},{35}
{36,37,38,39}
{40,41,42},{43}
{44,45,46}
{47,48}
{49,50}
{1}
{2,3}
{4},{5,6},{7}
{8,9},
{10,11},
{12,13}, {14},
{15},
{16,17}, {18,19},
{20},{21},
{22},{23},{24}, {25,26,27},{28},{29}
{30,31},{32,33},
{34},{35}
{36,37},{38},{39},
{40},{41},{42},{43}
{44},{45},{46},
{47,48}
{49,50}
{1}
{2},{3}
{4},…,{7}
{8,9},
{10},
{11}, {14},
{15},
{16,17}, {18,19},
{20},{21},
{22},{23},{24}, {25},{26},{27},
{28},
{29}
{30,31},{32},{33},
{34},{35}
{36,37},{38},{39},
{40},{41},{42},{43}
{44},{45},{46},
{47,48}
{49,50}
{1}
{2},{3}
{4},…,{7}
{8},…,{29}
{30},…,{35}
{36},…,{43}
{44},…,{48}
{49},{50}
Evaluation Of Fuzzy Pareto Solution Set By Using Fuzzy Relation
Based Clustering Approach For Fuzzy Multi-Response Experiments Ö. Türkşen, A. Apaydın
SAU J. Sci. Vol 17, No 1, p. 75-84, 2013 83
Merging of the solutions depend on the threshold values
. In order to see the fuzzy relation clusters, by using
the transitive matrix given in Table 5, different
threshold values are chosen for the clustering of fuzzy
non-dominated solutions such as
0.60;0.70;0.75;0.80;0.85;0.90;1. The obtained
clustering results are given in Table 6.
It can be seen from the Table 6 that if the threshold
value is chosen equal to 0.70, basically the fuzzy Pareto
solution set can be divided into seven clusters. The
clustering results are shown in Figure 5 with different
colours for 0.70 . Hence, it is clear to see from
Figure 5 that 50 fuzzy non-dominated solutions are
reduced into the solution groups which are represented
with 7 clusters for 0.70 . If the threshold value is
chosen equal to 0.80, the fourth group of the fuzzy non-
dominated solutions, which is shown with the sub-figure
of Figure 5, can divide different clusters, too.
5. CONCLUSION AND DISCUSSION
In this study, a multi-response experiment is considered
as a fuzzy response valued experiment with crisp
experiment conditions. The fuzzy response values are
represented as triangular fuzzy numbers. The fuzzy
responses are modeled by using fuzzy least squares
method and triangular fuzzy model parameters are
estimated. The problem with fuzzy response functions is
considered as a fuzzy MOO problem where the fuzzy
objective functions are conflicting. In order to optimize
the fuzzy MOO problem, FNSGA-II is used and fuzzy
non-dominated solutions are obtained. Each fuzzy non-
dominated solution is represented with rectangulars by
using - cut calculations where many of the fuzzy
response values are covered by the rectangulars.
Therefore, it could be possible to say that the fuzzy
Pareto set brings flexibility for the evaluation of the
fuzzy responses.
Decision making is an important step to obtain
compromise solution set among many of the fuzzy
alternative solutions. Clustering of the fuzzy non-
dominated solutions can be considered as a final stage
for the evaluation of the fuzzy multi-response problem.
In this work, fuzzy non-dominated solutions are
clustered by using fuzzy relational clustering approach.
The clustering of the fuzzy non-dominated solutions
makes easy to choose the similar fuzzy response values.
Therefore, each cluster, composed with alternative
solutions, can be used as a solution group of the
problem. Hence, it becomes easier to decide the
experimental conditions for the multi-response
experiment.
REFERENCES
[1] KHURI, A.I., CORNELL, M., Response Surfaces,
Marcel Dekker Inc., New-York, 1996.
[2] MYERS, R.H., MONTGOMERY, D.C., Response
Surface Methodology: Process and Product
Optimization Using Designed Experiments, John Wiley
and Sons, New York, 2002.
[3] BOX, G.E.P., DRAPER, N.R., Response Surface
Mixtures and Ridge Analysis, John Wiley and Sons,
New Jersey, 2007.
[4] ZADEH, L.A., Fuzzy Sets, Information and Control,
Vol.8, 338-353, 1965.
[5] SILVA, R.C., YAMAKAMI, A., Definition of fuzzy
Pareto-optimality by using possibility theory, IFSA-
EUSFLAT 2009, 1234-1239, 2009.
[6] XIE, H., LEE, Y.C., Process Optimization Using a
Fuzzy Logic Response Surface Method, IEEE
Transactions on Components, Packaging, and
Manufacturing Technology-Part A, Vol.17, No.2, 1994.
[7] PRASAD, K., NATH, N., Comparison of Sugarcane
Juice Based Beverage Optimisation Using Response
Surface Methodology with Fuzzy Method, Sugar Tech,
Vol.4, No.3-4, 109-115, 2002.
[8] LU, D., ANTONY, J., Optimization of multiple
responses using a fuzzy-rule based inference system,
International Journal of Production Research, Vol.40,
No.7, 1613-1625, 2002.
[9] SHARMA, V., Multi Response Optimization of
Process Parameters Based on Taguchi-Fuzzy Model for
Coal Cutting by Water Jet Technology, International
Journal on Design and Manufacturing Technologies,
Vol.4, No.1, 10-14, 2010.
0.2 0.3 0.4 0.5 0.6 0.7 0.8
f1 fuzzy
f2 f
uzzy
Figure 5. Clustering results of fuzzy non-dominated solutions for
0.70

Ö. Türkşen, A. Apaydın Evaluation Of Fuzzy Pareto Solution Set By Using Fuzzy Relation
Based Clustering Approach For Fuzzy Multi-Response Experiments
84 SAU J. Sci. Vol 17, No 1, p. 75-84, 2013
[10] KIM, K.J., LIN, D.K.J., Dual response surface
optimization: A Fuzzy modeling approach, Journal of
Quality Technology, Vol.30, No.1, 1-10, 1998.
[11] BASHIRI, M., HOSSEININEZHAD, S.J., A Fuzzy
Programming for Optimizing Multi Response Surface in
Robust Designs, Journal of Uncertain Systems, Vol.3,
No.3, 163-173, 2009.
[12] BASHIRI, M., RAMEZANI, M., An interactive
fuzzy group decision making approach to multiple
response problems considering least significant
difference, International Journal of Management
Science and Engineering Management, Vol.5, No.4,
243-251, 2010.
[13] LAI, Y.J., CHANG, S., A fuzzy approach for
multiresponse optimization: An off-line quality
engineering problem, Fuzzy Sets and Systems, Vol.63,
117-129, 1994.
[14] XU, R., DONG, Z., Fuzzy Modeling in Response
Surface Method for Complex Computer Model Based
Design Optimization, Mechatronic and Embedded
Systems and Applications Proceedings of the 2nd
IEEE/ASME International Conference, 1-6, 2006.
[15] TÜRKŞEN, Ö., Fuzzy and Heuristic Approach to
the Solution of Multi-Response Surface Problems, PhD
Thesis, Ankara University, Ankara, 2011.
[16] APAYDIN, A., TÜRKŞEN, Ö., Evaluation of the
Fuzzy Pareto Solution Set by Fuzzy Decision Making
Approach in Multi-Response Surface Problems, 12.
EYİ, Proceedings of the 12th International Symposium
on Econometrics Statistics and Operational Research,
70-81, 2011.
[17] TÜRKŞEN, Ö., APAYDIN, A., Modeling and
Optimization of Multi-Response Surface Problems with
Fuzzy Approach, Anadolu University Journal of
Science and Technology, Vol.13, No.1, 65-79, 2012.
[18] NAZEMI, A., CHAN, A.H., YAO, X., Selecting
representative parameters of rainfall-runoff models
using multi-objective calibration results and a fuzzy
clustering algorithm, BHS 10th National Hydrology
Symposium, Exeter, 13-20, 2008.
[19] BUDITJAHJANTO, I.G.P.A., Fuzzy Clustering
Based on Multi-Objective Optimization Problem for
Design an Intelligent Agent in Serious Game, Journal of
Theoretical and Applied Information Technology,
Vol.28, No.1, 54-62, 2011.
[20] DUNN, J.C., A graph theoretic analysis for
pattern classification via tamura’s fuzzy relation,
IEEE Transactions on Systems, Man and Cybernetics,
Vol.4, No.3, 10-313, 1974.
[21] DİAMOND, P., Fuzzy least squares, Information
Sciences, Vol.46, 214-219, 1988.
[22] LAI, Y.J., HWANG, C.L., Fuzzy Mathematical
Programming, Springer-Verlag, Berlin, 1992.
[23] BEZDEK, J.C., Pattern Recognition With Fuzzy
Objective Function, New York, Plenum, 1981.
[24] GUSTAFSON, D.E., KESSEL, W.C., Fuzzy
clustering with a fuzzy covariance matrix, IEEE Conf.
Decision Contr. in Proc., San Diego, CA, 1979.
[25] DAVE, R.N., Use of the adaptive fuzzy clustering
algorithm to detect lines in digital images, Intell. Robots
Comput. Vision VIII, Vol.1192, No.2, 600-611, 1989.
[26] KAYMAK, U., SETNES, M., Fuzzy clustering
with volume prototypes and adaptive cluster merging,
IEEE Transactions on Fuzzy Systems, Vol.10, No.6,
2002.
[27] ZHANG, H., A Note on Fuzzy Clustering, Paper
Review Report, Department of Computer Science and
Engineering, 1-19, 2005.
[28] XIE, X.L., BENI, G., A validity measure for fuzzy
clustering, IEEE Trans. Pattern Anal. Machine Intell.,
Vol.13, 841–847, 1991.
[29] YANG, M.S., SHİH, H.M., Cluster analysis based
on fuzzy relations, Fuzzy Sets and Systems, Vol.120,
197-212, 2001.
[30] YANG, M.S., A Survey of Fuzzy Clustering,
Mathematical Computing and Modeling, Vol.18, No.11,
1-16, 1993.
[31] SOUSA, J.M.C., KAYMAK, U., Fuzzy Decision
Making in Modeling and Control, World Scientific,
2002.

SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 85-96, 2013 SAU J. Sci. Vol 17, No 1, p. 85-96, 2013
85
Farklı özellikteki malzemelerin tozaltı ark kaynak yöntemi ile birleştirilmesi
ve birleştirmelerin tahribatlı ve tahribatsız muayenesi
Ali Akın AKAY1, Yakup KAYA2*, Nizamettin KAHRAMAN2
1Emek Boru Makine Sanayi ve Ticaret A.Ş., Ankara
2Karabük Üniversitesi, Teknoloji Fakültesi, İmalat Mühendisliği, Karabük *[email protected]
27.12.2012 Geliş/Received,s 26.01.2013 Kabul/Accepted
ÖZET
Bu çalışmada, petrol ve doğal gaz hatlarında kullanılan, X60, X65 ve X70 çelikleri, tozaltı ark kaynak yöntemi ile
farklı tel (S1 ve S2Mo) ve tozlar (LN761 ve P223) kullanılarak birleştirilmiştir. Kaynaklı birleştirmelere, öncelikle
yüzey ve yüzey altı kusurların belirlenebilmesi için tahribatsız muayene yöntemlerinden gözle ve radyografik
muayeneye teknikleri uygulanmış, sonrasında kaynaklı bölgede tel-toz-ana malzeme kompozisyonlarını belirlemek
için, spektral analiz çalışmaları yapılmıştır. Kaynaklı birleştirmelerin tokluk özelliklerini belirlemek amacıyla, çentik
darbe testi yapılmıştır. Ayrıca numuneler üzerinde sertlik ve mikroyapı çalışmaları gerçekleştirilmiştir. Kaynaklı
numuneler üzerinde yapılan gözle ve radyografik muayeneler sonucunda, kaynak bölgesinde herhangi bir kaynak
hatasına rastlanılmamıştır. Spektral analiz sonuçlarına göre, kaynak metali kimyasal bileşimi içerisindeki C oranının,
ana malzemeden yüksek, ilave metalden daha düşük olduğu belirlenmiştir. Çentik darbe test sonuçlarına göre, S2Mo
teli ve P223 tozu ile birleştirilen numuneler, S1 teli ve LN 761 tozu kullanılan birleştirmelere göre daha iyi tokluk
dayanımına sahip oldukları görülmüştür. Yapılan sertlik testleri sonucunda, en yüksek sertlik değerleri kaynak
metalinden ölçülmüştür. Mikroyapı görüntüleri incelendiğinde, tüm birleştirmelerde, ısı girdisi sabit olduğundan,
kaynak metalleri, ITAB’lar ve kaynak ergime sınırına bitişik bölgelerin birbirlerine benzer görüntüler sergilediği
belirlenmiştir.
Anahtar Kelimeler: Tozaltı ark kaynak, X60-X65-X70 çeliği, radyografik muayene, çentik darbe testi
Joınıng of materıals wıth dıferent propertıes through submerged arc weldıng
process and destructıve and non-destructıve testıng of the joınts
ABSTRACT
In this study, X60, X65 and X70 steels used in petroleum and natural gas pipeline were joined with Submerged Arc
Welding by using different type of welding fluxes (LN761 and P223) and wires (S1 and S2Mo). Initially, visual and
radiographic inspection techniques were subjected to welded joints for determining surface and subsurface defects.
After that, spectral analyses were carried out in order to determine the compositions of wire-flux-base metal on the
joints. Impact toughness test were performed for determining toughness properties the joints. Furthermore, hardness
and microstructure studies were also
* Sorumlu Yazar / Corresponding Author

A. A. Akay, Y. Kaya, N. Kahraman Farklı Özellikteki Malzemelerin Tozaltı Ark Kaynak Yöntemi İle
Birleştirilmesi Ve Birleştirmelerin Tahribatlı Ve Tahribatsız Muayenesi
86 SAU J. Sci. Vol 17, No 1, p. 85-96, 2013
carried out on the samples. As a result of the visual and radiographic inspection on the welded samples, there were
no weld defects on joints were observed. It was clearly understood that carbon ratio in the compositions of weld
metal higher than base metal but lower than filler metal in terms of spectral analyses results. According to impact
toughness test results, the joints obtained by using S2Mo welding wire and P223 welding flux had better impact
toughness value than the joints obtained by S1 welding wire and LN 761 welding flux. With respect to hardness test,
the highest hardness values were measured on weld metal. When the microstructure images were examined, it is
clearly understood that similar images for all the joints were shown adjacent zones to weld metals heat affected
zones and welding boundary, due to heat input constant.
Keywords: Submerged arc welding, X60-X65-X70 steels, radiographic inspection, impact toughness test
1. GİRİŞ
Gelişmiş boru hattı sistemleri dünyanın her yerinde
üretim alanlarından tüketicilere petrol, petrol ürünleri ve
doğal gaz taşımaktadır. Uzak mesafelere petrol ve gaz
ürünlerini taşımak için faydalanılabilmek en kolay ve en
ucuz yolun boru hatlarını kullanmak olduğu herkes
tarafından bilinmektedir. Boru hatlarının uzunluğunun
ve boru çaplarının artması kaynak teknolojisine olan
ihtiyacı arttırmaktadır [1]. Gaz ve petrol iletim
hatlarında çoğunlukla tozaltı kaynak yöntemi ile
üretilen spiral veya düz dikişli borular kullanılmaktadır
[1,2].
Tozaltı kaynağı, kaynak için gerekli ısının, eriyen
elektrod (veya elektrodlar) ile iş parçası arasında oluşan
ark (veya arklar) sayesinde ortaya çıktığı bir ark kaynak
yöntemidir. Ark bölgesi kaynak tozu tabakası ile kaynak
metali ve kaynağa yakın ana metal de ergiyen kaynak
tozu (cüruf) ve kaynak dikişi tarafından korunur.
Koruyucu görevi yapan kaynak tozu ayrıca kaynak
banyosu ile reaksiyona girerek kaynak metalini
deokside eder. Alaşımlı çelikleri kaynak yaparken
kullanılan kaynak tozlarında, kaynak metalinin
kimyasal kompozisyonunu dengeleyen alaşım
elementleri bulunabilir [2,3].
Bu çalışmada; petrol ve doğal gaz hatları için üretilmiş
API 5L (American Petroleum Institue) standardında,
X60, X65 ve X70 kalitesindeki çelik malzemeler, tozaltı
ark kaynak yöntemi ile farklı kimyasal kompozisyona
sahip iki ayrı tel (S1 ve S2Mo) ve toz (LN761 ve P223)
kullanılarak birleştirilmiştir. Kaynak işlemi tamamlanan
numunelere, öncelikle gözle muayene ve radyografik
muayene teknikleri uygulanmış, daha sonra ise spektral
analiz çalışmaları yapılmıştır. Kaynaklı birleştirmelerin
tokluk özelliklerini belirlemek amacıyla, çentik darbe
testi yapılmıştır. Ayrıca numuneler üzerinde sertlik ve
mikroyapı çalışmaları gerçekleştirilmiştir.
2. DENEYSEL ÇALIŞMALAR
Bu çalışmada, API 5L standardında, petrol ve doğalgaz
boru hatlarında kullanılan, düşük alaşımlı, ince taneli,
yüksek mukavemetli X60, X65 ve X70 malzemeler
kullanılmıştır. Çalışmada kullanılan malzemelerin
kimyasal bileşimleri Tablo 1’de verilmiştir. Birleştirme
işlemlerinde, S1 ve S2Mo (Tablo 2) olmak üzere iki
farklı kaynak teli ile LN 761 ve P223 (Tablo 3) kaynak
tozu kullanılmıştır.
Tablo 1. Deneylerde kullanılan malzemelerin kimyasal analizleri
Malzeme Kimyasal Bileşim
C Si Mn P S Cr Ni Mo Cu Al Ti V Nb Fe
X60 0,065 0,191 1,260 0,009 0,005 0,032 0,011 0,034 0,013 0,039 0,019 0,045 0,044
Kalan X65 0,073 0,161 1,265 0,011 0,005 0,100 0,013 0,077 0,019 0,036 0,017 0,037 0,042
X70 0,074 0,188 1,413 0,009 0,003 0,172 0,169 <0,0001 0,012 0,027 0,012 0,044 0,034
Tablo 2. Deneylerde kullanılan tellerin kimyasal analizleri
Kullanılan t e l Kimyasal Bileşim
C Mn Si P S Cr Ni Mo Cu Sn Al V Fe
OE S1 0,075 0,56 0,05 0,007 0,003 0,08 0,02 0,009 0,05 0,001 0,002 0,02 Kalan
OE S2Mo 0,09 1,115 0,12 0,006 0,007 0,07 0,05 0,48 0,08 0,003 0,003 0,01

Farklı Özellikteki Malzemelerin Tozaltı Ark Kaynak Yöntemi İle
Birleştirilmesi Ve Birleştirmelerin Tahribatlı Ve Tahribatsız Muayenesi A. A. Akay, Y. Kaya, N. Kahraman
SAU J. Sci. Vol 17, No 1, p. 85-96, 2013 87
Tablo 3. Deneylerde kullanılan kaynak tozlarının kimyasal kompozisyonu
Kullanılan toz Kimyasal Bileşim (%)
LN 761 SiO2 MnO MgO CaF2 Na2O Al2O3 TiO2 FeO Metal Alaşımı
45 19 22 5 2 2 2 1 6 max
P 223 SiO2 MnO MgO CaF2 Al2O3 CaO TiO2 K2O FeO NaO Metal Alaşımı
23 4 21 21 20 4 2 1 1 2 3 max.
500x175x14.3 mm boyutlarında kesilen X60, X65 ve
X70 malzemelere 45º kaynak ağzı açılmıştır. Parçalar,
aralarında 2 mm boşluk bırakılarak, örtülü elektrik ark
kaynak yöntemi ile puntalanmıştır. Birleştirme
işlemlerinde kullanılan kaynak parametreleri Tablo 4’te
verilmiştir. Kaynak esnasında, kaynaklı parçalara
verilen ısı girdisinin sabit olması için, tel ve tozlar hariç
diğer kaynak parametreleri sabit tutulmuştur. Kaynak
işlemlerinde bakır altlık kullanılmış ve birleştirilen
numuneler, kaynak sonrasında açık havada soğumaya
bırakılmıştır.
Tablo 4. Kaynak esnasında kullanılan kaynak parametreleri
Malzeme Akımı
(A) Voltaj
(V) Kaynak Hızı
(cm/dk) Tel çapı
(mm) Akım
tipi
İlave
tel
Kaynak
tozu
Isı girdisi
(KJ/mm)
X60
800 29.5 15 4.0 DC + S1 LN 761 9.44 X65
X70
X60
800 29.5 15 4.0 DC + S2Mo P 223 9.44 X65
X70
Kaynak işlemleri tamamlanan numunelerin, öncelikle
uzman bir personel tarafından gözle muayenesi
yapılmıştır. Ayrıca kaynaklı numunelerin tümü,
radyografik teste tabi tutulmuştur. Parçaların
radyografik muayenesinde, YXLON marka floroskopik
muayene sistemi (Şekil 1) kullanılmıştır. Muayene,
Emek Boru AŞ’de APL 5L normları gözetilerek, konu
hakkında gerekli belgeye sahip (NDT Level 2)
radyografik muayene uzmanı tarafından yapılmış ve
değerlendirilmiştir. Tahribatsız muayenesi tamamlanan
numunelerden, her parametreden 18 adet çentik darbe (9
adet ITAB ve 9 adet kaynak dikişi) test numunesi
hazırlanmıştır. Ayrıca sertlik ve mikroyapı çalışmaları
ile elementel analiz çalışmaları için, her bir numuneden
1’er adet olmak üzere toplam 6 numune alınmıştır.
Şekil 1. Floroskopik muayene sistemi
Tozaltı ark kaynak yöntemi ile farklı tel ve tozlar
kullanılarak yapılan birleştirmelerin kaynak metalinden
elementel analizler yapılmış ve kaynak esnasında
kullanılan tel ve toz kompozisyonunun kaynak metaline
etkileri belirlenmeye çalışılmıştır. Çentik darbe
numuneleri charpy olarak 300 J, izod olarak 165 J test
yapabilme kapasitesine sahip Heckert marka cihaz ile
charpy yöntemi kullanılarak, -20°C, 0°C ve 20°C
sıcaklarında gerçekleştirilmiştir. Şekil 2’de çentik darbe
numune örneği ve deneyin yapıldığı cihaz verilmiştir.

A. A. Akay, Y. Kaya, N. Kahraman Farklı Özellikteki Malzemelerin Tozaltı Ark Kaynak Yöntemi İle
Birleştirilmesi Ve Birleştirmelerin Tahribatlı Ve Tahribatsız Muayenesi
88 SAU J. Sci. Vol 17, No 1, p. 85-96, 2013
Şekil 2. Çentik darbe numune örneği ve cihazın görüntüsü
Sertlik deneyleri, Struers marka Duramin A300 model,
Vickers, Brinell, Rockwell cinsinden makro ve mikro
ölçümler yapabilen bir cihaz yardımıyla yapılmıştır.
Sertlik ölçme işleminde Vickers sertlik ölçme metodu
kullanılmış ve ölçme esnasında 10 kg yük
uygulanmıştır. Kaynaklı numunelerin sertlik ölçümleri,
kaynak metali, ITAB ve ana malzemeyi kapsayacak
şekilde, kaynak kesitinden gerçekleştirilmiştir. Sertlik
ölçümleri çift yönlü olarak (kaynak metali ve kaynak
bölgesi), Şekil 3’de gösterilen noktalardan alınmıştır.
Şekil 3. Sertlik ölçme testine ait numune şekli ve sertlik ölçüm noktaları
Mikroyapı fotoğrafları için alınan numuneler standart
metalografik numune hazırlanma kurallarına uygun
olarak sırasıyla 200, 400, 600, 800, 1000 ve 1200 gritlik
zımparalarla zımparalanmış, 3 mikron elmas solüsyonu
ile parlatılmış daha sonra % 3 Nital çözeltisiyle
dağlanmıştır. Numunelerin mikro yapıların
görüntülenmesinde Leica DFC320 dijital kamera
bağlantılı Leica DM4000M optik mikroskop
kullanılmıştır.
3. DENEYSEL SONUÇLAR VE TARTIŞMA
3.1. Gözle Muayene
Tozaltı ark kaynak yöntemi ile farklı tel ve tozlar
kullanılarak yapılan birleştirmeler, yüzey kusurlarının
tespiti için gözle muayeneye tabi tutulmuşlardır. Gözle
muayene işlemleri, standartlar için gerekli şartları
sağlayan bir ortamda ve uzman bir personel tarafından
yapılmıştır. Muayene sonucunda, kaynak yüzeyinde
çatlak, yetersiz nüfuziyet ve kökte çökme gibi kaynak
hatalarının bulunmadığı tespit edilmiştir. Kaynaklarda,
kısmen yanma oluklarının oluştuğu, ancak bu hataların
kabul standardının izin verdiği sınırlar içinde olduğu
belirlenmiştir.
3.2. Radyografik Muayene
Şekil 4’te radyografik film görüntüleri verilmiştir.
Ayrıca, Şekil 5’de radyografik muayene protokolü (film
parametreleri) ve tüm numuneler için hazırlanmış NDT
uzman raporu verilmiştir. Radyografik muayene
sonucunda, tozaltı ark kaynağında oluşabilecek
nüfuziyet yetersizliği, yanma olukları, gözenek
oluşumu, kalıntılar, çatlaklar vb. hatalar
gözlemlenmemiş ve gözetilen normlar dâhilinde kabul
edilmiştir.

Farklı Özellikteki Malzemelerin Tozaltı Ark Kaynak Yöntemi İle
Birleştirilmesi Ve Birleştirmelerin Tahribatlı Ve Tahribatsız Muayenesi A. A. Akay, Y. Kaya, N. Kahraman
SAU J. Sci. Vol 17, No 1, p. 85-96, 2013 89
Şekil 4. Radyografik filmler
Şekil 5. Radyografik muayene a) protokolü b) sertifikası
3.3. Kimyasal Analiz
Kaynaklı numunelerdeki, kaynak dikişinden alınan
spektral analiz sonuçları Tablo 5’de verilmiştir. Ayrıca,
analiz sonuçlarının daha anlaşılabilir olması açısından,
elementlerden sadece C (karbon) ve Mn (mangan) için
ayrı ayrı grafikler çizilmiştir. Şekil 6.a’da C
elementinin, kaynak metali içerisindeki miktarı, Şekil
6.b’de ise Mn elementinin kaynak metali içerisindeki
miktarını göstermektedir.
Analiz sonuçlarına göre % C oranı genel olarak ana
malzemeye göre kaynak metalinde artmıştır. X60
malzemede C oranı % 0.065, S1 ilave metalinde C oranı
a) b)

A. A. Akay, Y. Kaya, N. Kahraman Farklı Özellikteki Malzemelerin Tozaltı Ark Kaynak Yöntemi İle
Birleştirilmesi Ve Birleştirmelerin Tahribatlı Ve Tahribatsız Muayenesi
90 SAU J. Sci. Vol 17, No 1, p. 85-96, 2013
% 0.075 iken, kaynak sonrasında bu bileşim % 0,068
olarak ölçülmüştür. Buradan, kaynak metali kimyasal
bileşimi içerisindeki C oranının, ana malzemeden
yüksek, ilave metalden daha düşük olduğu
anlaşılmaktadır. Kaynak metalinin, ana malzeme ile
ilave metalin karışımından oluştuğu düşünüldüğünde,
bulunan sonuç ile beklenen sonucun, uyum içerisinde
olduğu görülmüştür. Aynı durum, X65 ve X70
malzemelerin kaynak metalleri içinde geçerlidir.
Kaynak metali içerisindeki Mn oranı incelendiğinde %
1.019 olduğu görülmektedir. Mn oranı X60 ana
malzemede %1.26 (Tablo1), ilave metalde ise % 0.56
olarak verilmiştir (Tablo 2). Bu durumda, C için geçerli
olan durum, Mn için de geçerli olmuştur.
% Mn oranı ise S1 teli ve LN 761 tozu kullanılan
numunelerde azalma, S2Mo teli ve P223 tozu kullanılan
numuneler de ise artma eğilimi göstermiştir. Kullanılan
tellerin kimyasal yapısındaki % Mn oranları Tablo 2’de
görüldüğü gibi farklılık göstermektedir. S2Mo teli %
Mn açısından S1 teline göre oldukça zengin bir bileşime
sahiptir. Ayrıca P223 tozunun kaynak metaline, LN 761
tozuna nazaran çok daha yüksek oranlarda Mn
elementini ihtiva ettiği bilinmektedir. Göze çarpan bir
diğer element ise Mo’dir. S2Mo telinin yüksek oranda
Mo elementi içermesi, kullanıldığı kaynaklı
birleştirmelerin kimyasal bileşiminde % Mo oranını
önemli ölçüde arttırmıştır.
Tablo 5. Kaynak dikişinden alınan kimyasal bileşim analizleri (Ağırlıkça %)
C Mn Si P S Cr Ni Mo Cu Al Ti V Nb Fe
X60-S1 0,068 1,019 0,231 0,009 0,007 0,022 0,014 0,020 0,064 0,008 0,005 0,024 0,015
Kalan
X65-S1 0,074 1,061 0,273 0,011 0,007 0,062 0,025 0,044 0,062 0,010 0,006 0,020 0,016
X70-S1 0,079 1,112 0,223 0,010 0,006 0,095 0,106 0,002 0,041 0,005 0,003 0,023 0,011
X60-S2Mo 0,072 1,313 0,261 0,015 0,007 0,021 0,027 0,204 0,054 0,014 0,006 0,027 0,019
X65-S2Mo 0,078 1,321 0,228 0,015 0,006 0,025 0,030 0,195 0,060 0,012 0,005 0,019 0,014
X70-S2Mo 0,084 1,331 0,234 0,016 0,007 0,026 0,033 0,198 0,062 0,012 0,005 0,020 0,016
Şekil 6. Kaynak metalindeki a) % C oranı b) % Mn oranı grafiği (ağırlıkça %)
3.4. Sertlik Testi
Düşük karbonlu, az alaşımlı çeliklerin kaynağında
ITAB’da çatlamaya karşı emniyet için sertliğin 350 HV
sertlik değerini geçmemesi tavsiye edilmektedir. Tüm
kaynaklı numunelerden, bu kritik değerin altında sertlik
değerleri ölçülmüştür. Sertlik ölçümleri, Şekil 3’de
belirtilen noktalardan alınmıştır. Şekil 7’deki kaynaklı
numunelerin sertlik grafikleri incelendiğinde, genel
olarak kaynak metalinin ITAB ve ana malzemeden daha
sert olduğu görülmektedir. Ana malzemede en yüksek
sertlik X70 malzemesinde 222 HV olarak ölçülmüştür.
En düşük sertlik ise X60 malzemesinde 186 HV olarak
ölçülmüştür. Kaynak metalinde ise en yüksek sertlik
değeri S2Mo teli ile kaynatılan X70 malzemesinde 246
HV, en düşük sertlik değer ise S1 teli ile kaynatılan X60
malzemesinde 200 HV olarak ölçülmüştür. Tablo 5’de,
kaynak metalinden ölçülen % C oranının, ana
malzemeye ait olan ITAB ve ana malzemeden yüksek
olması bu sonucu doğrulamaktadır.
0
0,2
0,4
0,6
0,8
1
1,2
1,4
X60-S1
X65-S1
X70-S1
X60-S2
X65-S2
X70-S2
Ma
ng
an
(%
)
Numuneler
0
0,02
0,04
0,06
0,08
0,1
X60-S1
X65-S1
X70-S1
X60-S2
X65-S2
X70-S2
Ka
rbo
n (
%)
Numuneler a) b)
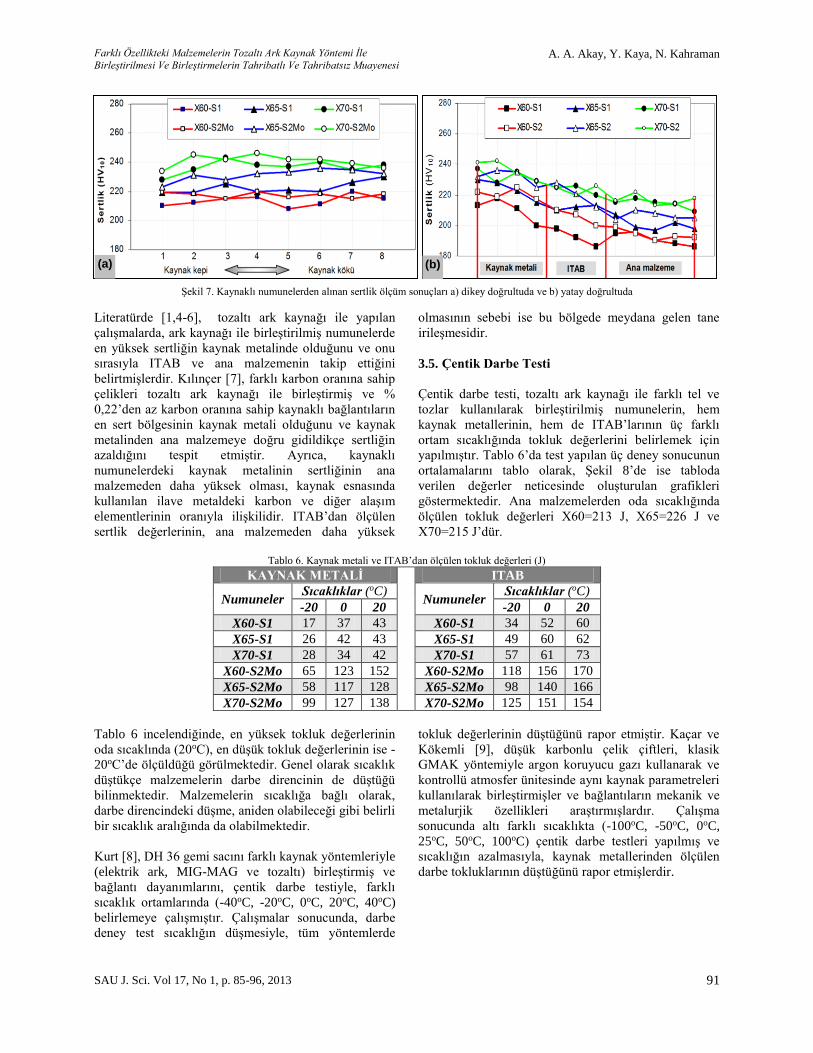
Farklı Özellikteki Malzemelerin Tozaltı Ark Kaynak Yöntemi İle
Birleştirilmesi Ve Birleştirmelerin Tahribatlı Ve Tahribatsız Muayenesi A. A. Akay, Y. Kaya, N. Kahraman
SAU J. Sci. Vol 17, No 1, p. 85-96, 2013 91
Şekil 7. Kaynaklı numunelerden alınan sertlik ölçüm sonuçları a) dikey doğrultuda ve b) yatay doğrultuda
Literatürde [1,4-6], tozaltı ark kaynağı ile yapılan
çalışmalarda, ark kaynağı ile birleştirilmiş numunelerde
en yüksek sertliğin kaynak metalinde olduğunu ve onu
sırasıyla ITAB ve ana malzemenin takip ettiğini
belirtmişlerdir. Kılınçer [7], farklı karbon oranına sahip
çelikleri tozaltı ark kaynağı ile birleştirmiş ve %
0,22’den az karbon oranına sahip kaynaklı bağlantıların
en sert bölgesinin kaynak metali olduğunu ve kaynak
metalinden ana malzemeye doğru gidildikçe sertliğin
azaldığını tespit etmiştir. Ayrıca, kaynaklı
numunelerdeki kaynak metalinin sertliğinin ana
malzemeden daha yüksek olması, kaynak esnasında
kullanılan ilave metaldeki karbon ve diğer alaşım
elementlerinin oranıyla ilişkilidir. ITAB’dan ölçülen
sertlik değerlerinin, ana malzemeden daha yüksek
olmasının sebebi ise bu bölgede meydana gelen tane
irileşmesidir.
3.5. Çentik Darbe Testi
Çentik darbe testi, tozaltı ark kaynağı ile farklı tel ve
tozlar kullanılarak birleştirilmiş numunelerin, hem
kaynak metallerinin, hem de ITAB’larının üç farklı
ortam sıcaklığında tokluk değerlerini belirlemek için
yapılmıştır. Tablo 6’da test yapılan üç deney sonucunun
ortalamalarını tablo olarak, Şekil 8’de ise tabloda
verilen değerler neticesinde oluşturulan grafikleri
göstermektedir. Ana malzemelerden oda sıcaklığında
ölçülen tokluk değerleri X60=213 J, X65=226 J ve
X70=215 J’dür.
Tablo 6. Kaynak metali ve ITAB’dan ölçülen tokluk değerleri (J)
KAYNAK METALİ ITAB
Numuneler Sıcaklıklar (oC)
Numuneler Sıcaklıklar (oC)
-20 0 20 -20 0 20
X60-S1 17 37 43 X60-S1 34 52 60
X65-S1 26 42 43 X65-S1 49 60 62
X70-S1 28 34 42 X70-S1 57 61 73
X60-S2Mo 65 123 152 X60-S2Mo 118 156 170
X65-S2Mo 58 117 128 X65-S2Mo 98 140 166
X70-S2Mo 99 127 138 X70-S2Mo 125 151 154
Tablo 6 incelendiğinde, en yüksek tokluk değerlerinin
oda sıcaklında (20oC), en düşük tokluk değerlerinin ise -
20oC’de ölçüldüğü görülmektedir. Genel olarak sıcaklık
düştükçe malzemelerin darbe direncinin de düştüğü
bilinmektedir. Malzemelerin sıcaklığa bağlı olarak,
darbe direncindeki düşme, aniden olabileceği gibi belirli
bir sıcaklık aralığında da olabilmektedir.
Kurt [8], DH 36 gemi sacını farklı kaynak yöntemleriyle
(elektrik ark, MIG-MAG ve tozaltı) birleştirmiş ve
bağlantı dayanımlarını, çentik darbe testiyle, farklı
sıcaklık ortamlarında (-40oC, -20oC, 0oC, 20oC, 40oC)
belirlemeye çalışmıştır. Çalışmalar sonucunda, darbe
deney test sıcaklığın düşmesiyle, tüm yöntemlerde
tokluk değerlerinin düştüğünü rapor etmiştir. Kaçar ve
Kökemli [9], düşük karbonlu çelik çiftleri, klasik
GMAK yöntemiyle argon koruyucu gazı kullanarak ve
kontrollü atmosfer ünitesinde aynı kaynak parametreleri
kullanılarak birleştirmişler ve bağlantıların mekanik ve
metalurjik özellikleri araştırmışlardır. Çalışma
sonucunda altı farklı sıcaklıkta (-100oC, -50oC, 0oC,
25oC, 50oC, 100oC) çentik darbe testleri yapılmış ve
sıcaklığın azalmasıyla, kaynak metallerinden ölçülen
darbe tokluklarının düştüğünü rapor etmişlerdir.
(a) (b)

A. A. Akay, Y. Kaya, N. Kahraman Farklı Özellikteki Malzemelerin Tozaltı Ark Kaynak Yöntemi İle
Birleştirilmesi Ve Birleştirmelerin Tahribatlı Ve Tahribatsız Muayenesi
92 SAU J. Sci. Vol 17, No 1, p. 85-96, 2013
Şekil 8. Çentik darbe test grafikleri a)Kaynak metali b) ITAB
Grafikler incelendiğinde, S2Mo teli ve P223 tozu
kullanılarak birleştirilen numunelerden alınan değerler,
S1 teli ve LN 761 tozu kullanılarak birleştirilen
numunelerden alınan değerlerden daha yüksek
bulunmuştur. Çentik darbe test sonuçlarında S2Mo tel
ve P223 toz kullanılan kaynaklı numunelerin
değerlerinin yüksek çıkmasının sebeplerinden biriside
P223 tozunun bazik karakterli olması ile ilgili olduğu
düşünülmektedir. P223 tozunun bazik karakterli olması,
kaynak esnasında kaynak banyosundaki serbest haldeki
oksijen elementini yüksek oranda redüklemesini
sağlamaktadır [10]. LN 761 tozu ise rutil karakterli
olması sebebiyle oksijen elementini P223 tozu kadar
redükleyememektedir. Bilindiği üzere oksijen elementi
kaynaklı bölgede istenmeyen bir elementtir. Oksijen
elementinin kaynaklı bölgede yüzde oran olarak düşük
olması çentik darbe dayanımını arttırmaktadır. Durgutlu
vd. yaptıkları çalışmada, tozaltı ark kaynağı ile düşük
karbonlu çelik malzemeleri farklı özelliğe sahip kaynak
tozları ile birleştirmiş, yapılan birleştirmelerin
incelenmesi sonucunda en iyi tokluk değerlerinin P223
tozu ile kaynaklanmış numunelerde olduğu saptanmıştır
[5].
Çentik darbe test sonuçları incelendiğinde, en yüksek
çentik darbe enerjilerini ana malzeme gösterirken, bunu
sırayla ITAB ve kaynak metalinin takip ettiği
görülmektedir. Buradan anlaşılmaktadır ki, ana
malzeme, ITAB ve kaynak metalinden ölçülen tokluk
değerleri, aynı bölgelerden ölçülen sertlik değerleriyle
paralellik göstermektedir. Yani sertlik arttıkça, tokluk
azalmaktadır. Çetinkaya [11] yaptığı bir araştırmada,
sertliğin artmasıyla tokluğun azaldığını rapor
etmektedir. Burada kaynak metalinden elde edilen
çentik darbe mukavemetleri ITAB’den elde edilen
değerlerden daha düşük bulunmuştur. Düşük karbonlu
çeliklerin kaynağında ITAB’nin kırılma davranışları
üzerine yapılan bir araştırmada [12] ITAB’daki iri taneli
bölgenin tokluğunun, kaynak metalinden daha yüksek
olduğu belirtilmiştir. Ayrıca ITAB’ın sertliğinin kaynak
metali sertliğinden düşük olmasının bu sonucu
doğruladığı belirtilmiştir.
Kaya ve arkadaşları [4], tozaltı ark kaynağı ile
birleştirilen farklı kalınlıktaki Grade A gemi saclarının
mekanik özellikleri üzerine yaptıkları çalışmada
ITAB’ın tokluğunun kaynak metalinden daha yüksek
olduğu ve ITAB’ın sertliğinin kaynak metalinden daha
düşük olmasının bu sonucu doğurduğunu
belirtmişlerdir. Elde edilen çentik darbe sonuçları,
sertlik sonuçları ile kıyaslandığında, sertliğin yüksek
olduğu kaynak metallerinde tokluk değerleri düşük,
sertliğin düşük olduğu ITAB’da ise tokluk değerleri
yüksek çıkmıştır. Ayrıca çalışmada, özellikle tozaltı ark
kaynağı gibi yüksek ısı girdisine sahip bir yöntemde,
kaynak metali gevrek bir davranış gösterirken, ITAB’ın,
kaynak metaline nazaran daha tok yapıda olduğu
vurgulanmıştır.
Karbon miktarı malzeme sertliğini arttırıcı
mekanizmaların en önemlilerinden biridir. Karbon
miktarı arttıkça malzemenin sertliği artar, çentik darbe
dayanımı ise düşer [1]. Kimyasal analiz sonuçlarından
da anlaşılacağı üzere kaynak metalinde karbon oranı ana
malzemeye göre artmıştır. Bu da kaynak metalinde
sertliğin artmasına ve çentik darbe dayanımının ITAB’a
göre düşük olmasına neden olmuştur. Tozaltı kaynak
metalinde tokluğun yüksek olması için mangan oranının
%1,2'den fazla olması gerektiği önerilmektedir. Bu
oranın üzerine çıkıldığında asiküler ferrit hacim oranı
arttığından tokluk artmaktadır. Tokluktaki artış
manganın optimum değerine ulaşmasına kadar devam
etmektedir [10]. S1 tel ve LN 761 toz kullanılan
numunelerde ana malzemeye göre % Mn oranı azalmış
ve S2Mo tel ve P223 toz kullanılan numunelerde ise %
Mn oranı artmıştır (Tablo 5). S2Mo tel kullanılan
numunelerde tokluğun yüksek çıkmasının sebeplerinden
birinin de kaynak metali bileşimindeki yüksek % Mn
oranı olduğu düşünülmektedir.
Molibdenin örtülü elektrot kaynak metaline ilave
edilmesinin ana amacı, kaynak mukavemetini
arttırmaktır. Molibden östenit dönüşümünü önler ve
dönüşüm sıcaklığını biraz düşürür. Molibden
karbürlerin çökelmesi östenit tane sınırlarında ferrit
0
40
80
120
160
200
X60-S1 X65-S1 X70-S1 X60-S2Mo X65-S2Mo X70-S2Mo
-20 0 20
0
40
80
120
160
X60-S1 X65-S1 X70-S1 X60-S2Mo X65-S2Mo X70-S2Mo
-20 0 20
a) b)
Da
rbe
da
ya
nım
ı (J
)
Numuneler
Da
rbe
da
ya
nım
ı (J
)
Numuneler

Farklı Özellikteki Malzemelerin Tozaltı Ark Kaynak Yöntemi İle
Birleştirilmesi Ve Birleştirmelerin Tahribatlı Ve Tahribatsız Muayenesi A. A. Akay, Y. Kaya, N. Kahraman
SAU J. Sci. Vol 17, No 1, p. 85-96, 2013 93
dönüşümünü engeller. Bu nedenle asiküler ferrit hacim
oranında artışa sebep olur [10]. Tablo 5’de kaynak
metalinden alınan kimyasal analiz sonuçlarında S2Mo
tel kullanılan numunelerde % Mo oranın, S1 tel
kullanılan numunelerden fazla olduğu görülmektedir.
Sonuç olarak % Mo oranın, S2Mo teli kullanılan
numunelerde yüksek olması asiküler ferrit hacim
oranında artışa ve darbe çentik testlerinde yüksek tokluk
elde edilmesine neden olmuştur.
3.6. Mikroyapı İncelemeleri
Şekil 9’da kaynak işlemlerinde kullanılan ana
malzemelerin (X60, X65 ve X70) mikroyapı fotoğrafları
verilmiştir. Ana malzeme mikro yapı fotoğraflarına
bakıldığında malzemelerin tipik eş eksenli, perlit ve
ferritten oluşan, ince taneli bir yapıya sahip olduğu
gözlenmektedir. Ayrıca, kaynak için seçilen
malzemelerden X70 malzemesi en ince tane yapısına
sahip iken, bu malzemeyi sırasıyla X65 ve X60
malzemeleri takip etmektedir.
Şekil 9. Ana malzeme mikro yapı görüntüleri a) X60, b) X65 ve c) X70
Şekil 10-15’da ITAB, kaynak metali ve ITAB-kaynak
metali geçiş bölgelerinin mikroyapı görüntüleri
verilmiştir. Görüntüler genel olarak
değerlendirildiğinde, tüm birleştirmelerde kaynak
metalleri, ITAB’lar ve kaynak ergime sınırına bitişik
bölgelerin birbirlerine benzer görüntüler sergilediği
belirlenmiştir. Ayrıca, tel ve toz bileşimi etkileri hariç,
tüm numunelerdeki ısı girdisi sabit olduğundan, gerek
kaynak metalleri, gerekse ITAB tane boyutlarının
birbirlerine yakın olduğu tespit edilmiştir. Numunelerin
(a) ve (b) kodlu ITAB ve kaynak metali görüntüleri
incelendiğinde kaynak metaline doğru incelen ferritik ve
perlitik yapılar görülmektedir. Görülen beyaz alanlar
“ferrit”, siyah olarak görülen alanlar ise ince taneli
“perlitik” yapılardır. Ayrıca (a) ve (b) kodlu ITAB ve
kaynak metali mikroyapı fotoğraflarında değişik
oranlarda görülen ötektoid öncesi ferrit fazı, tane
sınırlarında uzun ve/veya geniş boyutlarda
widmanstatten yapılar ile tane içi widmanstatten yapılar
görülmektedir
.
Şekil 10. X60-S1 numunenin mikro yapı fotoğrafları a) ITAB b) kaynak metali c) ITAB–kaynak metali geçiş bölgesi
(a) (b) (c)
(a) (b) (c)

A. A. Akay, Y. Kaya, N. Kahraman Farklı Özellikteki Malzemelerin Tozaltı Ark Kaynak Yöntemi İle
Birleştirilmesi Ve Birleştirmelerin Tahribatlı Ve Tahribatsız Muayenesi
94 SAU J. Sci. Vol 17, No 1, p. 85-96, 2013
Şekil 11. X65-S1 numunenin mikro yapı fotoğrafları a) ITAB b) kaynak metali c) ITAB–kaynak metali geçiş bölgesi
Şekil 12. X70-S1 numunenin mikro yapı fotoğrafları a) ITAB b) kaynak metali c) ITAB–kaynak metali geçiş bölgesi
Şekil 13. X60-S2Mo numunenin mikro yapı fotoğrafları a) ITAB b) kaynak metali c) ITAB–kaynak metali geçiş bölgesi
Şekil 14. X65-S2Mo numunenin mikro yapı fotoğrafları a) ITAB b) kaynak metali c) ITAB–kaynak metali geçiş bölgesi
(a) (b) (c)
(a) (b) (c)
(a) (b) (c)
(a) (b) (c)
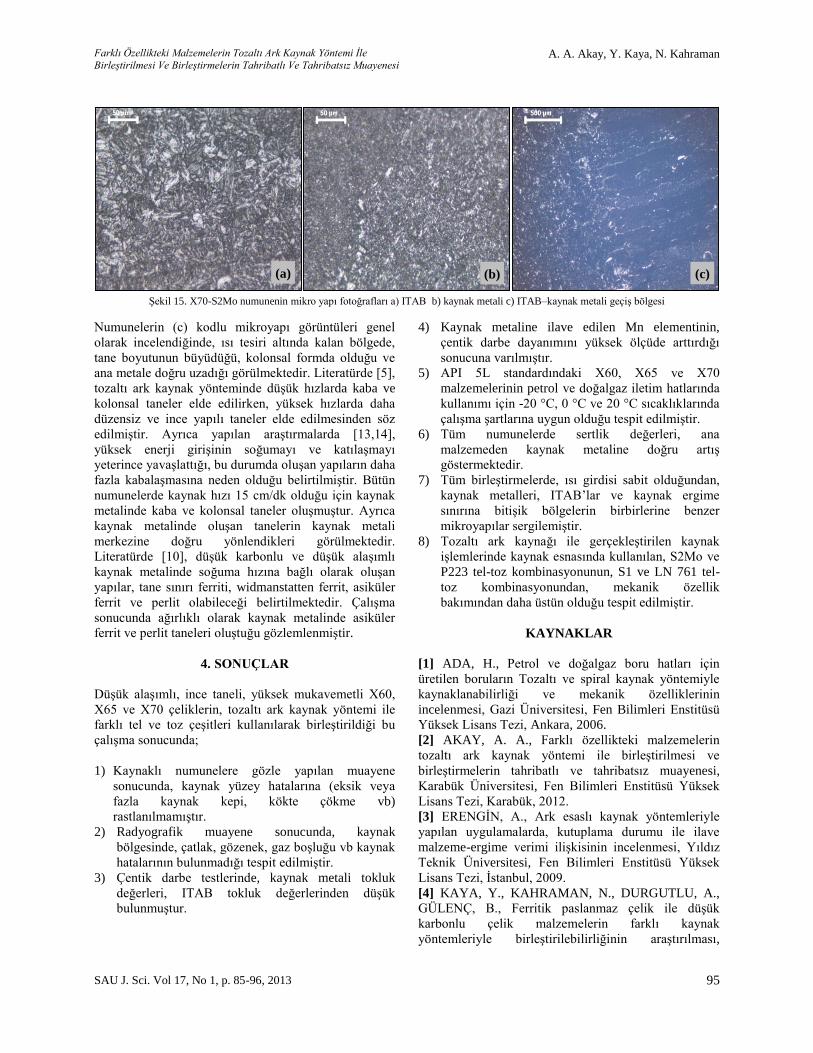
Farklı Özellikteki Malzemelerin Tozaltı Ark Kaynak Yöntemi İle
Birleştirilmesi Ve Birleştirmelerin Tahribatlı Ve Tahribatsız Muayenesi A. A. Akay, Y. Kaya, N. Kahraman
SAU J. Sci. Vol 17, No 1, p. 85-96, 2013 95
Şekil 15. X70-S2Mo numunenin mikro yapı fotoğrafları a) ITAB b) kaynak metali c) ITAB–kaynak metali geçiş bölgesi
Numunelerin (c) kodlu mikroyapı görüntüleri genel
olarak incelendiğinde, ısı tesiri altında kalan bölgede,
tane boyutunun büyüdüğü, kolonsal formda olduğu ve
ana metale doğru uzadığı görülmektedir. Literatürde [5],
tozaltı ark kaynak yönteminde düşük hızlarda kaba ve
kolonsal taneler elde edilirken, yüksek hızlarda daha
düzensiz ve ince yapılı taneler elde edilmesinden söz
edilmiştir. Ayrıca yapılan araştırmalarda [13,14],
yüksek enerji girişinin soğumayı ve katılaşmayı
yeterince yavaşlattığı, bu durumda oluşan yapıların daha
fazla kabalaşmasına neden olduğu belirtilmiştir. Bütün
numunelerde kaynak hızı 15 cm/dk olduğu için kaynak
metalinde kaba ve kolonsal taneler oluşmuştur. Ayrıca
kaynak metalinde oluşan tanelerin kaynak metali
merkezine doğru yönlendikleri görülmektedir.
Literatürde [10], düşük karbonlu ve düşük alaşımlı
kaynak metalinde soğuma hızına bağlı olarak oluşan
yapılar, tane sınırı ferriti, widmanstatten ferrit, asiküler
ferrit ve perlit olabileceği belirtilmektedir. Çalışma
sonucunda ağırlıklı olarak kaynak metalinde asiküler
ferrit ve perlit taneleri oluştuğu gözlemlenmiştir.
4. SONUÇLAR
Düşük alaşımlı, ince taneli, yüksek mukavemetli X60,
X65 ve X70 çeliklerin, tozaltı ark kaynak yöntemi ile
farklı tel ve toz çeşitleri kullanılarak birleştirildiği bu
çalışma sonucunda;
1) Kaynaklı numunelere gözle yapılan muayene
sonucunda, kaynak yüzey hatalarına (eksik veya
fazla kaynak kepi, kökte çökme vb)
rastlanılmamıştır.
2) Radyografik muayene sonucunda, kaynak
bölgesinde, çatlak, gözenek, gaz boşluğu vb kaynak
hatalarının bulunmadığı tespit edilmiştir.
3) Çentik darbe testlerinde, kaynak metali tokluk
değerleri, ITAB tokluk değerlerinden düşük
bulunmuştur.
4) Kaynak metaline ilave edilen Mn elementinin,
çentik darbe dayanımını yüksek ölçüde arttırdığı
sonucuna varılmıştır.
5) API 5L standardındaki X60, X65 ve X70
malzemelerinin petrol ve doğalgaz iletim hatlarında
kullanımı için -20 °C, 0 °C ve 20 °C sıcaklıklarında
çalışma şartlarına uygun olduğu tespit edilmiştir.
6) Tüm numunelerde sertlik değerleri, ana
malzemeden kaynak metaline doğru artış
göstermektedir.
7) Tüm birleştirmelerde, ısı girdisi sabit olduğundan,
kaynak metalleri, ITAB’lar ve kaynak ergime
sınırına bitişik bölgelerin birbirlerine benzer
mikroyapılar sergilemiştir.
8) Tozaltı ark kaynağı ile gerçekleştirilen kaynak
işlemlerinde kaynak esnasında kullanılan, S2Mo ve
P223 tel-toz kombinasyonunun, S1 ve LN 761 tel-
toz kombinasyonundan, mekanik özellik
bakımından daha üstün olduğu tespit edilmiştir.
KAYNAKLAR
[1] ADA, H., Petrol ve doğalgaz boru hatları için
üretilen boruların Tozaltı ve spiral kaynak yöntemiyle
kaynaklanabilirliği ve mekanik özelliklerinin
incelenmesi, Gazi Üniversitesi, Fen Bilimleri Enstitüsü
Yüksek Lisans Tezi, Ankara, 2006.
[2] AKAY, A. A., Farklı özellikteki malzemelerin
tozaltı ark kaynak yöntemi ile birleştirilmesi ve
birleştirmelerin tahribatlı ve tahribatsız muayenesi,
Karabük Üniversitesi, Fen Bilimleri Enstitüsü Yüksek
Lisans Tezi, Karabük, 2012.
[3] ERENGİN, A., Ark esaslı kaynak yöntemleriyle
yapılan uygulamalarda, kutuplama durumu ile ilave
malzeme-ergime verimi ilişkisinin incelenmesi, Yıldız
Teknik Üniversitesi, Fen Bilimleri Enstitüsü Yüksek
Lisans Tezi, İstanbul, 2009.
[4] KAYA, Y., KAHRAMAN, N., DURGUTLU, A.,
GÜLENÇ, B., Ferritik paslanmaz çelik ile düşük
karbonlu çelik malzemelerin farklı kaynak
yöntemleriyle birleştirilebilirliğinin araştırılması,
(a) (b) (c)

A. A. Akay, Y. Kaya, N. Kahraman Farklı Özellikteki Malzemelerin Tozaltı Ark Kaynak Yöntemi İle
Birleştirilmesi Ve Birleştirmelerin Tahribatlı Ve Tahribatsız Muayenesi
96 SAU J. Sci. Vol 17, No 1, p. 85-96, 2013
International Iron & Steel Symposium, 2-4 Nisan 2012,
779-788, Karabük, Türkiye.
[5] DURGUTLU., A, KAHRAMAN., N, GÜLENÇ, B.,
Tozaltı ark kaynağında kaynak tozunun mikroyapı ve
mekanik özelliklere etkisinin incelenmesi, Gazi
Üniversitesi Endüstriyel Sanatlar Eğitim Fakültesi
Dergisi, 10, 11, 1-8, 2002.
[6] ASARKAYA, M., Gemi inşasında kullanılan
kaynak yöntemlerinin mekanik özelliklere etkisi,
Sakarya Üniversitesi, Fen Bilimleri Enstitüsü, Yüksek
Lisans Tezi, Sakarya, 54-86, 2006.
[7] KILINÇER, S., Düşük karbonlu çeliklerin tozaltı ark
kaynak yöntemi ile kaynak edilebilirliğinin ve mekanik
özelliklerinin incelenmesi, Gazi Üniversitesi, Fen
Bilimleri Enstitüsü, Yüksek Lisans Tezi, 1998.
[8] KURT, K., DH 36 gemi sacının farklı kaynak
yöntemleri ile mekanik özelliklerinin incelenmesi,
Sakarya Üniversitesi, Fen Bilimleri Enstitüsü, Yüksek
Lisans Tezi, Sakarya, 21-32, 2008.
[9] KAÇAR, R., KÖKEMLİ, K., Effect of controlled
atmosphere on the Mig-Mag arc weldment properties,
Materials & Design, 26, 6, 508-516, 2005.
[10] YÜKLER, İ., Kaynak Metali, Marmara
Üniversitesi, Teknik Eğitim Fakültesi Matbaası,
İstanbul, 52-64, 1994.
[11] ÇETİNKAYA, C., Düşük karbonlu çeliklerin
tozaltı ark kaynak yöntemi ile kaynak edilebilirliği ve
mekanik özelliklerinin incelenmesi, Gazi Üniversitesi,
Fen Bilimleri Enstitüsü Dergisi, 12, 2, 279-293, 1999.
[12] KİM, J. H., OH, Y. J., HWANG, II S., KİM, D. J.,
KİM, JEONG T., Fracture behavior of heat-affected
zone in low alloy steels, Journal of Nuclear Materials,
299, 132-139, 2001.
[13] EROĞLU, M., AKSOY M., Enerji girişinin kaynak
metali mikroyapısı ve mekanik özellikleri üzerine etkisi,
Bilim Günleri Bildiriler Kitabı Makine Mühendisleri
Odası, Denizli, 434-439, 1999.
[14] KILINÇER, S., KAHRAMAN, N., AISI 409 ve
Ç1010 çeliğin östenitik elektrod kullanarak MIG
kaynak yöntemi ile birleştirilmesi ve mekanik
özelliklerinin araştırılması, Gazi Üniversitesi
Mühendislik Mimarlık Fakültesi Dergisi, 24, 1, 23-31,
2009.

SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 97-103, 2013 SAU J. Sci. Vol 17, No 1, p. 97-103, 2013
97
İşçi sağlığı ve güvenliği yönetimi ile toplam kalite yönetimi sistemleri veri
analizi incelemesi
Ahmet YAKUT1*, Rıfat AKBIYIKLI1
1Sakarya Üniversitesi, Fen Bilimleri Enstitüsü, İnşaat Mühendisliği, Yapı A.B.D., Sakarya
27.04.2012 Geliş/Received, 29.11.2012 Kabul/Accepted
ÖZET
Çalışmamızda İşçi Sağlığı ve Güvenliği ile Toplam Kalite Yönetiminin inşaat sektörü üzerinde etkileri, İstanbul ili
şantiyelerinde yapılan 25 adet firma anketi sonuçları ile değerlendirilmiştir. İşçi Sağlığı ve Güvenliği programının
sağlıklı yürüyebilmesi; eğitimin artması ve çalışanların aktif rol almasıyla önemini arttıracaktır. Ülkemizde İSG
sisteminin yeterince uygulanmamasından ötürü, iş kazaları ve söz konusu kazalar sonucu meydana gelen ölüm ve
yaralanmalar oldukça fazladır. Yapılan analizler sonucunda firmalar, sağlık ve güvenlik sorumluluklarını yerine
getirebilmeleri için etkili bir yönetim sistemine ihtiyaç duymaktadır. Bu sistem OHSAS 18001 İş Sağlığı ve
Güvenliği Yönetim Sistemi olarak belirlenmiş ve inşaat sektörünün olmazsa olmazlarından olduğu kanısına
varılmıştır.
Anahtar Kelimeler: İSG, TKY, OHSAS 18001
Data analysis of occupational health and safety management and total quality
management systems
ABSTRACT
In our study, Total Quality Management, Occupational Health and Safety on the effects of the construction industry,
building sites of Istanbul evaluated with the results of the survey of 25 firms. For Occupational Health and Safety
program, walked healthy, active employees in her role increased and will increase the importance of education. Due
to non-implementation of the OHS system in our country enough, work-related accidents and deaths and injuries
resulting from these accidents is very high. Firms as a result of the analysis, an effective health and safety
management system needs to be able to fulfill their responsibilities. This system is designated as OHSAS 18001
Occupational Health and Safety Management System and the construction industry can be regarded as the
imperatives.
Keywords: OHSAS, TQM, OHSAS 18001
* Sorumlu Yazar / Corresponding Author
A. Yakut, R. Akbıyıklı İşçi Sağlığı Ve Güvenliği Yönetimi İle Toplam Kalite Yönetimi
Sistemleri Veri Analizi İncelemesi
98 SAU J. Sci. Vol 17, No 1, p. 97-103, 2013
1.GİRİŞ
Şantiyelerde çalışmaların aksamadan devam edebilmesi,
tehlikelerin arındırılması ve sağlığı olumsuz yönde
etkileyen nedenlerden korunmak amacıyla İşçi Sağlığı
ve İşçi Güvenliği ve bu sistemin yönetim süreci Toplam
Kalite Yönetimi geliştirilmiştir. İSG nin genel amacı
kazaların önlenmesinin yanı sıra oluşabilecek kaza ve
meslek hastalığı sonucu maddi manevi zarar gören
işçinin tazminatı ile de ilgilenir. Bunu SGK (Sosyal
Güvenlik Kurumu) yüklenmektedir.
Günümüzde şantiyelerde yüksek oranda yaralanma ve
ölümle sonuçlanan iş kazaları olmaktadır. Bu SGK’yı
doğal olarak ülke ekonomisini olumsuz etkileyecektir.
İş Sağlığı ve İş Güvenliği; işçiyi, işçi yakınlarını ve
işvereni doğabilecek kazalardan, OHSAS 18001 kalite
yönetim sisteminin gelişmesiyle güvence altına almıştır.
İşçi Sağlığı ve Güvenliği Yönetimi’nin sitemli işlemesi,
çevresel ve diğer faktörlerin kontrol altında
tutulmasında büyük önem arz etmektedir. Bazı
durumlarda çevresel nedenlerin kontrolü, yönetimin
kazaları önlemeye olan isteğini iş görenlere kanıtlaması
açısından çok yararlıdır. Çünkü bir işletmede kaza
önlemeye yönelik yapılacak çalışmalar, üst yönetimin
tutumu ile alakalıdır. İşçi Sağlığı ve Güvenliği sistemi
Toplam Kalite Yönetimi sistemi ile ilişkilidir. Toplam
kalite yönetimi, üretim verimliliğini arttırmak amacıyla
kullanılan yaklaşımdır. Belirtildiği gibi toplam kalite
yönetimi verimliliği, memnuniyeti arttırmak için
yapılmış bir teknik olmakla beraber İşçi Sağlığı ve İş
Güvenliği yönetimi amacıyla da uygulanmaktadır.
Toplam kalite yönetimi yöntemi iş sağlığı ve
güvenliğine hem destek hem dayanak hem de ikisini bir
arada sunarak kalitenin artmasını amaçlamaktadır.
2. İŞÇİ SAĞLIĞI ve İŞ GÜVENLİĞİ İLE İLGİLİ
TEMEL KAVRAMLAR
2.1. İşçi Sağlığı ve İş Güvenliği
İş sağlığı ve güvenliği; işin yapılması sırasında
işyerindeki fiziki çevre şartları sebebiyle işçilerin maruz
kaldıkları sağlık sorunları ve mesleki risklerin ortadan
kaldırılması veya azaltılması ile ilgilenen bilim dalıdır.
2.2. İş Kazası
İş kazaları için zamanı tahmin edilemeyen durumlarda,
önlemlerin alınmaması sonucunda gerek maddi gerekse
manevi hasarlar oluşturabilen kazaların tümüdür
diyebiliriz. Bedensel ve manevi hasar oluşturan
durumlarda zararı karşılamak üzere kusurlu taraflardan
tazmini konusu ilerleyen başlıklarda detaylı bir şekilde
incelenip analiz edilmiştir.
2.3. İş Kazalarının Temel Nedenleri
Bir kaza beş adet temel nedenin arka arkaya dizilmesi
sonucu meydana gelir. Bunlardan biri olmadıkça bir
sonraki meydana gelmez ve dizi tamamlanmadıkça kaza
ve yaralanma olmaz. Bu beş faktöre "kaza zinciri" denir
[3].
1. İnsanın doğa ya da sosyal yapı içindeki
zayıflığı
2. Kişisel özürler
3. Güvensiz hareketler ve şartlar
4. Kaza olayı
5. Yaralanma [1]
İlk üç faktörün arka arkaya dizilmesi de kazanın olması
için yeterli olmaz. Önceden planlanmayan ve
bilinmeyen, zarar vermesi muhtemel bir olayın da
meydana gelmesi gereklidir. Şu halde yaralanma ya da
zararın meydana gelmesi, yani kazanın bütün unsurları
ile gerçekleşmesi için "bir kaza olayı" da mevcut
olmalıdır.
2.4. İş Kazalarının Önlenmesi
Kaza önleme çalışmaları tanım olarak iş gücü
performansının, alet, cihaz, makine performansının ve
fiziki çevrenin kontrol altında tutulabilmesi anlamına
gelmektedir. Kontrol sözcüğünün kullanılmasındaki
amaç; Onun, önleme ve güvenli olmayan koşulların ve
olayların düzeltilmesi olgularının her ikisini de içeriyor
olmasıdır. Kaza önleme, her inşaat firması ve
endüstriyel kuruluş için yaşamsal bir öneme sahiptir.
Kazalarla yeterince ilgilenilmemesi halinde yaralanma,
ölüm ve maddi kayıplara yol açacağından işletmeyi
olumsuz yönde etkileyecektir. Ayrıca kaza önleme
çalışmaları; Üretim ya da hizmetin sürekliliği, üretimin
artırılması, verimliliğin iyileştirilmesi ve işçi-işveren
arasındaki ilişkilerin İyileştirilmesi konularında olumlu
ve yararlı sonuçları beraberinde getirmektedir [4].
İş kazalarını önleme teknikleri:
1. Emniyetsiz Durumları Ortadan Kaldırma :
2. Emniyetsiz Davranışları Önlemek :
3. Çalışmada İyi Yöntemlerin Uygulanması :
4. Kişisel Koruyucular Kullanma [5].
Kazaları önlemek için İşçi Sağlığı ve Güvenliği sistemi
çevresel ve diğer faktörlerin kontrol altında
tutulmasında büyük önem teşkil etmektedir. Bazı
durumlarda çevresel nedenlerin kontrolü, yönetimin
kazaları önlemeye olan isteğini iş görenlere kanıtlaması
açısından çok yararlıdır. Çünkü bir işletmede kaza
önlemeye yönelik yapılacak çalışmalar, üst yönetimin
tutumu ile alakalıdır.

İşçi Sağlığı Ve Güvenliği Yönetimi İle Toplam Kalite Yönetimi
Sistemleri Veri Analizi İncelemesi
A. Yakut, R. Akbıyıklı
SAU J. Sci. Vol 17, No 1, p. 97-103, 2013 99
2.5. İş Güvenliği
İş güvenliği, iş yerlerinde iş kazaları ve meslek
hastalıklarının önlenmesi, çalışma ortam ve şartlarının
sağlığa uygun hale getirilmesi, insan kaynaklarının
değerlendirilmesi, geliştirilmesi ve güvensiz
hareketlerin önlenmesi amacıyla bir plan dahilinde yapı
sürekli çalışmaların metodik ve sürekli çalışmaların
tümüdür.
3. OHSAS 18001 ISG YÖNETİM SİSTEMİ VE
TOPLAM KALİTE KALİTE YÖNETİM SİSTEMİ
3.1. OHSAS 18001
OHSAS 18001, BSI (British Standards Institute)
tarafından yayınlanmış olan "İş Sağlığı ve Güvenliği"
standardıdır. OHSAS 18001; ISO 9000 ve ISO 14000
gibi diğer uluslararası standartlardan farklı olarak bazı
ulusal standart kuruluşları ve belgelendirme
kuruluşlarının birlikte çalışmasıyla gerçekleştirilmiştir
ve bir ISO standardı değildir. OHSAS 18001, bir işçi
sağlığı ve iş güvenliği yönetim sisteminin içerisinde
bulunması gereken kritik yönetim elemanlarını
tanımlayan ve Avrupa’da Nisan 1999’dan beri
kullanılan bir spesifikasyondur. OHSAS 18001
kuruluşların ürün ve hizmetlerinin güvenliğinden çok
çalışanın sağlığına ve işin güvenliğine yönelik bir
standarttır.
OHSAS 18001 ve TS 18001 iş güvenliği denetim serisi
standartları, organizasyonun işçi sağlığı ve iş güvenliği
risklerini kontrol etmesi ve performansını geliştirmesini
sağlamak için; işçi sağlığı ve iş güvenliği yönetim
sistemi şartlarını verir. Bu standartlar iş güvenliği
performans kriterleri veya bir yönetim sisteminin
tasarlanması için gerekli ayrıntılı maddeleri kapsamaz
[6].
3.1.1. OHSAS 18000'in yararları
OHSAS18001 İş Sağlığı ve Güvenliği Yönetim
Sistemi'nin sağladığı yararlar şunlardır:
1. Çalışanları işyerinin olumsuz etkilerinden ve
kazalardan koruyarak, rahat ve güvenli bir
ortamda çalışmalarını sağlamak,
2. Çalışan motivasyonu ve çalışan katılımını
arttırmak,
3. İş kazaları ve meslek hastalıkları sebebiyle
oluşabilecek iş ve iş gücü kayıplarını en aza
indirgeyerek, iş veriminde artışın sağlanması ve
maliyetlerin düşürülmesi, Çalışma ortamlarında
alınan tedbirlerle, işletmeyi tehlikeye
sokabilecek yangın, patlama, makine arızaları
vb. durumların ortadan kaldırılması neticesinde
işletme güvenliğinin sağlanması,
4. Ulusal ve uluslararası yasa ve standartlara uyum
sağlamak,
5. İş performansını arttırmak [2].
3.2. Toplam Kalite Yönetimi
Toplam kalite yönetimi verimliliği, memnuniyeti
arttırmak için yapılmış bir teknik olmakla beraber işçi
sağlığı ve iş güvenliği yönetimi amacıyla
uygulanmaktadır. Toplam kalite yönetimi yöntemi iş
sağlığı ve güvenliğine hem destek hem dayanak hem de
ikisini bir arada sunarak kalitenin artmasını
amaçlamaktadır.
İş güvenliği kimilerine göre işverenin tek başına
sağlamak zorunda olduğu güvenli bir çalışma ortamı,
kimilerine göre ise uyulmadığı takdirde işvereni sadece
maddi zarara uğratacak bir yasaklar zinciri olarak
görülmüştür. Bu nedenlerdir ki iş güvenliği uzunca bir
süre yalnızca devletin yasal düzenlemeleri kadar
gelişebilmiştir. Oysaki çağdaş işletmelerde “Toplam
Kalite Yönetimi’’ ilkelerine entegre olmuş İş güvenliği
kavramı kalite ve Verimlilik ilkeleri ile birlikte
işletmeyi başarıya götüren üçlü sac ayağını
oluşturmuştur. Böylece müşterinin, iş görenin ve
toplumun beklentilerini hep bir arada karşılamayı
hedefleyen Toplam Kalite felsefesinin en önemli
unsurlarından birisi haline gelen iş güvenliği; ölçme ve
sürekli iyileştirme yaklaşımları sonucu, kayda değer
ilerlemeler göstermiştir.
TKY’de verimlilik kavramı genelde elde edilen üretim
ile bu üretimi sağlayan üretim faktörleri arasındaki
oransal ilişkidir şeklinde tanımlanmaktadırlar. Bu tanım
olayın sadece ekonomik boyutunu dikkate almaktadır.
Konuya Toplam Kalite yönetimi esprisi içinde
bakılacak olursa verimlilik, bir düşünce biçimi bir hayat
tarzı ve bir tutum olarak düşünülmelidir. Buna uygun
bir ortamı yaratan işletmeler sonuçta insan faktörünün
işe devamını arttıracak, iş kazaları en aza inecek ve
insanın daha verimli çalışması sağlanacaktır. Sonuçta
uluslararası rekabette söz sahibi olma şansı artacak,
maliyetlerin düşürülmesiyle kar maksimizasyonu
sağlanarak üretimin kısa sürede ve kaliteli olması
gerçekleşecektir.
Toplam kalite yönetimi çerçevesinde kalite yönetimi
fonksiyonunun geniş bir yelpazeye dağıldığı herhangi
bir sınır ve kısıtlamaya uğramadığı tespit edilmiştir.
Kalite yönetim amacı müşteri odaklı olup sıkıntı halinde
müdahale etme, sorunları çözme ve memnuniyet amacı
gütmektedir.
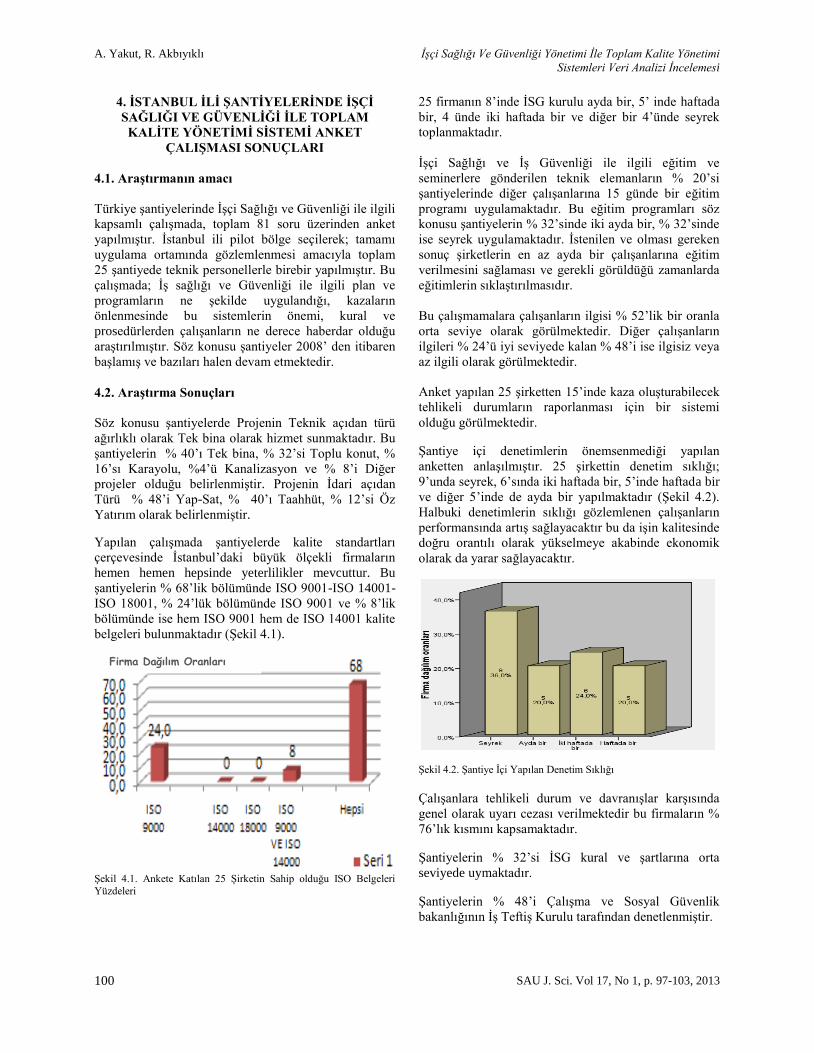
A. Yakut, R. Akbıyıklı İşçi Sağlığı Ve Güvenliği Yönetimi İle Toplam Kalite Yönetimi
Sistemleri Veri Analizi İncelemesi
100 SAU J. Sci. Vol 17, No 1, p. 97-103, 2013
4. İSTANBUL İLİ ŞANTİYELERİNDE İŞÇİ
SAĞLIĞI VE GÜVENLİĞİ İLE TOPLAM
KALİTE YÖNETİMİ SİSTEMİ ANKET
ÇALIŞMASI SONUÇLARI
4.1. Araştırmanın amacı
Türkiye şantiyelerinde İşçi Sağlığı ve Güvenliği ile ilgili
kapsamlı çalışmada, toplam 81 soru üzerinden anket
yapılmıştır. İstanbul ili pilot bölge seçilerek; tamamı
uygulama ortamında gözlemlenmesi amacıyla toplam
25 şantiyede teknik personellerle birebir yapılmıştır. Bu
çalışmada; İş sağlığı ve Güvenliği ile ilgili plan ve
programların ne şekilde uygulandığı, kazaların
önlenmesinde bu sistemlerin önemi, kural ve
prosedürlerden çalışanların ne derece haberdar olduğu
araştırılmıştır. Söz konusu şantiyeler 2008’ den itibaren
başlamış ve bazıları halen devam etmektedir.
4.2. Araştırma Sonuçları
Söz konusu şantiyelerde Projenin Teknik açıdan türü
ağırlıklı olarak Tek bina olarak hizmet sunmaktadır. Bu
şantiyelerin % 40’ı Tek bina, % 32’si Toplu konut, %
16’sı Karayolu, %4’ü Kanalizasyon ve % 8’i Diğer
projeler olduğu belirlenmiştir. Projenin İdari açıdan
Türü % 48’i Yap-Sat, % 40’ı Taahhüt, % 12’si Öz
Yatırım olarak belirlenmiştir.
Yapılan çalışmada şantiyelerde kalite standartları
çerçevesinde İstanbul’daki büyük ölçekli firmaların
hemen hemen hepsinde yeterlilikler mevcuttur. Bu
şantiyelerin % 68’lik bölümünde ISO 9001-ISO 14001-
ISO 18001, % 24’lük bölümünde ISO 9001 ve % 8’lik
bölümünde ise hem ISO 9001 hem de ISO 14001 kalite
belgeleri bulunmaktadır (Şekil 4.1).
Şekil 4.1. Ankete Katılan 25 Şirketin Sahip olduğu ISO Belgeleri
Yüzdeleri
25 firmanın 8’inde İSG kurulu ayda bir, 5’ inde haftada
bir, 4 ünde iki haftada bir ve diğer bir 4’ünde seyrek
toplanmaktadır.
İşçi Sağlığı ve İş Güvenliği ile ilgili eğitim ve
seminerlere gönderilen teknik elemanların % 20’si
şantiyelerinde diğer çalışanlarına 15 günde bir eğitim
programı uygulamaktadır. Bu eğitim programları söz
konusu şantiyelerin % 32’sinde iki ayda bir, % 32’sinde
ise seyrek uygulamaktadır. İstenilen ve olması gereken
sonuç şirketlerin en az ayda bir çalışanlarına eğitim
verilmesini sağlaması ve gerekli görüldüğü zamanlarda
eğitimlerin sıklaştırılmasıdır.
Bu çalışmamalara çalışanların ilgisi % 52’lik bir oranla
orta seviye olarak görülmektedir. Diğer çalışanların
ilgileri % 24’ü iyi seviyede kalan % 48’i ise ilgisiz veya
az ilgili olarak görülmektedir.
Anket yapılan 25 şirketten 15’inde kaza oluşturabilecek
tehlikeli durumların raporlanması için bir sistemi
olduğu görülmektedir.
Şantiye içi denetimlerin önemsenmediği yapılan
anketten anlaşılmıştır. 25 şirkettin denetim sıklığı;
9’unda seyrek, 6’sında iki haftada bir, 5’inde haftada bir
ve diğer 5’inde de ayda bir yapılmaktadır (Şekil 4.2).
Halbuki denetimlerin sıklığı gözlemlenen çalışanların
performansında artış sağlayacaktır bu da işin kalitesinde
doğru orantılı olarak yükselmeye akabinde ekonomik
olarak da yarar sağlayacaktır.
Şekil 4.2. Şantiye İçi Yapılan Denetim Sıklığı
Çalışanlara tehlikeli durum ve davranışlar karşısında
genel olarak uyarı cezası verilmektedir bu firmaların %
76’lık kısmını kapsamaktadır.
Şantiyelerin % 32’si İSG kural ve şartlarına orta
seviyede uymaktadır.
Şantiyelerin % 48’i Çalışma ve Sosyal Güvenlik
bakanlığının İş Teftiş Kurulu tarafından denetlenmiştir.
Firma Dağılım Oranları

İşçi Sağlığı Ve Güvenliği Yönetimi İle Toplam Kalite Yönetimi
Sistemleri Veri Analizi İncelemesi
A. Yakut, R. Akbıyıklı
SAU J. Sci. Vol 17, No 1, p. 97-103, 2013 101
Bu şantiyelerin % 32’si rutin tarama sonucu
denetlenmiştir, % 16’sı kaza sonucu denetlenmiştir, %
52’si ise hiç denetlenmediğini belirtmektedir.
Şantiyelerin çoğunluğu kendi İSG kurul yönetimleri
tarafından denetlenmektedir. Devlet tarafından yapılan
denetimler tam randımanlı değildir. Geçmiş yılara göre
artan denetimler ve bu denetimlerin getirdiği
sorumluluklar firmaları İSG konusunda kaliteli ve daha
dikkatli olmaya yöneltmektedir.
Şantiyeler; İSG kurallarına uymanın temel nedenlerine
% 16 acelecilik, %52 eğitimsizlik, % 8 maliyet, % 20
hepsi olarak cevaplandırmışlardır (Şekil 4.3).
Şekil 4.3. İSG Kurallarına Uymama Nedeni
Yapılan anket sonuçlarına göre İstanbul ilindeki büyük,
orta ve küçük ölçekli inşaat firmalarının %8'i İSG
yönetim sistemini hukuki nedenlerden, %68'i etik ve
ahlaki nedenlerden, %24'ü ise diğer nedenlerden dolayı
uygulamaktadır (Şekil 4.4).
Şekil 4.4. Firma Yetkililerine Göre İSG Yönetimi Sistemi Uygulanma Nedeni
5. SONUÇLAR VE ÖNERİLER
Tarihten bu yana iş kazaları ve meslek hastalıkları hep
gündem konusu olmuştur. İş kazaları ve meslek
hastalıkları nedeniyle her gün binlerce insanın yaşamını
yitirdiği, binlercesinin de sakatlandığı gerçeği ile karşı
karşıya kalınmaktadır. Bilimsel ve teknolojik gelişmeler
de işçi sağlığı ve güvenliğinin sağlanması için tek
başına yeterli olmamaktadır. İş yaşamına kolaylık ve hız
katan bilimsel gelişmeler, daha ölümcül kazaları da
beraberinde getirmektedir. Çünkü kapitalist sistemin iş
koşullarında bilim ve teknolojiye sermayeyi elinde
bulunduran işverenler lehine kullanılmakta, işçi sağlığı
ve güvenliği göz ardı edilmektedir.
Şantiyelerde en üst tabakada ki yöneticilerden en alt
tabakadaki çalışan işçilere kadar tüm çalışanların İşçi
Sağlığı ve Güvenliği bilincinde olması gerekmektedir.
Aralarındaki koordinasyon sayesinde şantiye içi
denetimler aktif olacaktır bu ise kaza sıklık oranını
minimize edecektir. Bu bağlamda koordinasyon İSG
yönetim sisteminin kendiliğinden yürümesini
sağlayacaktır. Amaç kontrol mekanizmasının şantiyede
olası kaza risklerini önceden tespit etmek ve bunların
önlenmesi adına çalışmalar yapmaktır. Böylelikle
şantiyelerdeki bilinen güvensiz çalışma koşullarının da
önüne geçilmiş olacaktır. Yapılan çalışmalarda da
görüldüğü gibi iş kazalarının % 52’si eğitimsizlik
sonucunda oluşmaktadır (bkz. Şekil 4.3). Eğitimsizlik
ise teknolojinin varlığıyla çözümlenmeye
çalışılmaktadır. Bununla birlikte işçiler eğitim
sıkıntısını az da olsa üzerlerinden atmıştır.
İnşaat sektöründe çalışanlara eğitim veren ve vermeyen
firmalarda; çalışanların memnuniyeti açısından bir fark
çıkmamıştır fakat eğitime katılımının sağlanması
açısından bir fark çıkmıştır.
Çalışma yapılan şantiyelerin genelinde İSG ile ilgili
birim ve bu birimlerin görev ve sorumluluklarının
belirtildiği dokümanlar bulunmaktadır. Resmi olarak
çalışanlar ile yapılan iş sözleşmelerinin çoğunda
sorumluluklarının açıklandığı bilinmektedir.
İncelenen şantiyelerin geneline bakıldığında, İSG ile
ilgili bir plan ve programın hazırlanmış olduğu
saptanmıştır. Ancak bazılarında uygulamaya yönelik
eksiklikler görülmektedir. Sorumluluklarını yerine
getirmeyip kurallara uymayanlara verilen cezaların da
yetersiz olduğu görülmüştür.
Sağlık personeli bulundurması zorunlu şantiyelerin
tümünde sağlık personeli bulunmakta ve haftada 1 veya
2 gün çalışmaktadırlar. Bu çalışmaların yeterli olmadığı
yapılan görüşmelerde saptanmıştır.
A. Yakut, R. Akbıyıklı İşçi Sağlığı Ve Güvenliği Yönetimi İle Toplam Kalite Yönetimi
Sistemleri Veri Analizi İncelemesi
102 SAU J. Sci. Vol 17, No 1, p. 97-103, 2013
Şantiyelerde uyarı levhalarının yeterince bulunduğu,
fakat teknik personelin de uyarmasına rağmen
çalışanların aksi davranışlar sergilediği saptanmıştır.
Teknolojinin gelişimiyle beraber müşterilerin
beklentilerinde de artışlar görülmektedir. Beklentileri
karşılamak, isteklere cevap vermek, geçmişten
günümüze kadar süre gelen rekabet ortamında daha iyi
bir yer edinmek için, Toplam Kalite Yönetim ve İşçi
Sağlığı ve Güvenliği kavramından uzak kalmak bir yana
dursun birçok sektör bu yönetim sistemlerini yaygın
olarak kullanmaktadır. İnşaat sektöründe de artan
rekabet, müşteri memnuniyetini bununla beraber
kaliteyi ön koşul olarak ortaya çıkarmıştır. Dolayısı ile
kaliteye ulaşabilmek için izlenecek yolun iyi bir şekilde
tanımlanması gerekir.
TKY sistemi, firmaların üretim sürecinin kalitesini
arttırmaya yöneliktir. Üretim süreci kalitesinin ürün
kalitesini etkileyeceği aşikârdır. Yaşam alanları inşa
edilirken elde edilen kalite seviyesi, tasarım aşamasında
inşaat aşamasında ve yapım süreçlerindeki kalite ile
ilişkilidir. İSG sistemi, meydana gelebilecek kazaların
nedenlerini bu nedenlerin doğrultusunda alınabilecek
önlemleri, işçiden teknik personele kadar tüm çalışanın
koordineli çalışması gerektiğini şantiyelerde kaza sıklık
oranlarının düşürülmesini amaçlar.
TKY ve İSG sisteminin bir inşaat firmasına
uygulanabilmesi için konuyla ilgili uzaman
danışmanların olması gereklidir. Bu sistemden yeterince
verim alabilmek için firmada çalışan tüm personelin
uzman kişi ile beraber çalışmalara katılması gereklidir.
Kalite artışının proje maliyetini, iş kazalarını ve
bunlardan doğabilecek meslek hastalıklarını aşağıya
çektiği ortadadır.
Bazı bilgiler ve kurallar hemen davranışa
aktarılamazlar. Bu davranışların alışkanlık haline
gelmesi için eğitim gereklidir. Örneğin tehlikeye karşı
kişisel koruyucu kullanılması gerekiyorsa, kişisel
koruyucunun kullanılması uzun bir eğitim gerektirir. Bu
yapılmazsa tehlikeyle temas olacak ve kaza vuku
bulacaktır.
Çalışanların bilgilendirilmesi ve eğitilmesinin
arkasından düzenli saha denetim programlanması
gerekir. Bu denetimlere boyunca güvenli davranışlar ve
güvenli koşullar sorgulanacaktır. Bir yerde kaza
olmuşsa ve daha önce yapılan denetimlerde kazaya
sebepleri tespit edilememişse saha denetimleri etkinliği
sorgulanır. Denetim programının geliştirilmesi veya
daha önceden bilinmeyen tehlikeli koşulların mevcut
denetim kontrol listesine eklenmesi gerekebilir.
Denetimlerin ayrıca daha sık yürütülmesi gerekebilir
ve/veya bozuklukların yok edilmesi veya doğru kontrol
edilmesini sağlayacak bir işlemin zamanında yapılması
gerekir [7].
Türk İnşaat sektöründe sonuçlardan da çıkarıldığı üzere
eksikliklerin giderilebilmesi için İSG Yönetim sistemini
en iyi bir şekilde uygulayarak, asıl öğenin müşteri
olduğunu iyice kavrayıp, çalışanların da birer müşteri
olduğunu kabul ederek, müşteri tatminini en üst
düzeyde tutan kültür değişimi sağlanmalıdır. Çalışanlar
İş yerinde olabilecek kazalardan ötürü kaygı duyup
korku içerisinde olmamalıdırlar.
Türkiye’de İşçi Sağlığı ve Güvenliği hukuki boyutu
düzenlemelerinin hukuki boşluklardan dolayı yeterli
olmadığı aynı zamanda iş kazalarının eğitimsizlik
sonucu ortaya çıkan güvensiz davranışlardan ve
hatalardan kaynaklandığı söylenebilir (bkz. Şekil 4.3).
Sadece kanun çıkarmakla konu çözümlenemez. Kanun
maddelerinin hayata geçirilmesi, denetim fonksiyonu ile
ilgilidir. Denetimi de sadece ceza kesmek olarak
algılamamalı, eğitim, uyarı ve bilinçlendirmeye çaba
sarf edilmeli, toplumda iş sağlığı ve iş emniyeti kültürü
geliştirilmelidir.
Toplumda İş Sağlığı ve İş Güvenliği kültürünün
geliştirilmesi de sadece devletten beklenilmemeli, basın
medya konuya daha duyarlı olmalı, özellikle sendikalar
üyelerine bu konuda yeterli eğitimi vermelidirler, iş
kolu sendikaları, toplu iş sözleşmelerinde bu konuya
dikkat etmelidirler. Önlem almak daha az masraflı ve de
sonuçları itibarı ile daha insancıldır.
Görüldüğü üzere hukuki düzenlemeler tek başına yeterli
olmayıp, bunların İşçi Sağlığı ve Güvenliği ve Toplam
Kalite Yönetimi sistemi ile bir arada ve uyum içerisinde
olması da sağlanmalıdır. Öyle ki bu mekanizmaların
beraber çalışmasıyla arzu edilen iş emniyeti kültürü
yerine oturacaktır. Türkiye’ de bulunan şantiyelerin İşçi
Sağlığı ve Güvenliği hususunu, tam anlamıyla idrak
edebilmeleri ve uygulamaya dökebilmeleri için;
çalışanların kalifiye olması gerekmektedir. Bu ise inşaat
sektörüne yeni bir boyut kazandırılıp, çalışanların belirli
eğitimlerden geçip yeterliliği almasından sonra
alanlarında çalışmalarına müsaade edilmesi ile mümkün
olacaktır. Sonuç olarak, inşaat işkolu, iş güvenliği
açısından bütün dünyada yüksek riskli bir sektördür,
ülkemizin risk seviyesi gelişmiş ülkelere göre çok daha
yüksektir. Bu nedenle, risk seviyesinin kabul edilebilir
seviyelere çekilerek, inşaat iş kolundaki rekabet
gücümüzün arttırabilmesi için, yasal düzenleme ve
bilinçlendirme bağlamında gerekli çalışmalar yapılarak
bunların zaman kaybetmeden hayata geçirilmesi katkı
sağlayacaktır.
İşçi Sağlığı Ve Güvenliği Yönetimi İle Toplam Kalite Yönetimi
Sistemleri Veri Analizi İncelemesi
A. Yakut, R. Akbıyıklı
SAU J. Sci. Vol 17, No 1, p. 97-103, 2013 103
KAYNAKLAR
[1] TMMOB İnşaat Mühendisleri Odası İşçi Sağlığı ve
İş Güvenliği Sempozyumu notları, Çanakkale, 21-
23 Ekim 2011.
[2] İSO kalite Yönetim Sistemleri,
http://www.avrupapatent.com/marka.php?tescili=i
sokaliteyonetimsistemleri / Erişim Tarihi:
10.03.2012.
[3] Akyüz, N. İş Güvenliği, Sakarya D M M
Akademisi Ders Notları, sayı:28, Sakarya, 1982.
[4] Güyagüler, T. Bozkurt, R., İş Kazalarının Modern
Yöntemlerle Önlenmesi İşçi Sağlığı ve İş
Güvenliği Kongresi, Ankara, 1992.
[5] İş Kazalarını Önleme Teknikleri, Erişim Tarihi:
23.11.2012.
[6] Gürcanlı G.E., Müngen U., OHSAS 18001 İş
Sağlığı ve Güvenliği Yönetim Sistemi ve Bir
Uygulama Örneği, 3. Yapı İşletmesi Kongresi,
İzmir, 2005.
[7] Baradan S., Türkiye İnşaat Sektöründe İş
Güvenliğinin Yeri ve Gelişmiş Ülkelerle
Kıyaslanması, Deü Mühendislik Fakültesi Dergisi,
sayı:1, İzmir, 2006.


SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 105-111, 2013 SAU J. Sci. Vol 17, No 1, p. 105-111, 2013
105
Bisfenol a’nın zebra balıklarında (danio rerio) teratolojik etkileri
Cansu AKBULUT1*, Nazan Deniz YÖN1
1Sakarya Üniversitesi Fen Edebiyat Fakültesi Biyoloji Bölümü SAKARYA, [email protected]
29.04.2012 Geliş/Received, 13.12.2012 Kabul/Accepted
ÖZET
Zebra balığı (Danio rerio), kolay üreme kapasitesine ve şeffaf embriyolara sahip olan ve bu yüzden bilimsel
çalışmalarda sıkca tercih edilen bir omurgalı modelidir. Bisfenol A günümüzde oldukça fazla üretilen ve plastik
yapısında bulunan bir madde olduğu için insanlar da dahil olmak üzere pek çok canlı grubu bu maddeye maruz
kalmaktadır. Bisfenol A östrojenik aktiviteye sahiptir ve bu yüzden üremeyi de yakından etkilemektedir. Bu
bağlamda çalışmamızda düşük dozlardaki (4 mg/L ve 8 mg/L) Bisfenol A’nın zebra balığı embriyo ve larva
gelişimine olan etkisi incelenmiştir.
Anahtar Kelimeler: Bisfenol A, zebra balığı, embriyo
Teratologıc effects of bısphenol a on zebrafısh (danio rerio)
ABSTRACT
Zebrafish (Danio rerio) has easy reproductive capacity and transparent embryos and therefore generally preffered for
scientific studies as a vertebrate model. Because of bisphenol A is produced too much and used for making plastics,
many organisms including human are exposed to this substance. Bisphenol A has estrogenic activity and thus it
effects fertility. So, in our study, effects of low doses of bisphenol A (4mg/L and 8 mg/L) on embryo and larva
development was investigated.
Key words: Bisphenol A, zebrafish, embryo
* Sorumlu Yazar / Corresponding Author

C. Akbulut, N. D. Yön Bisfenol A’nın Zebra Balıklarında (Danio Rerio) Teratolojik
Etkileri
106 SAU J. Sci. Vol 17, No 1, p. 105-111, 2013
1. GİRİŞ
Cyprinidae familyasına ait olan zebra balığı, doğal
yaşama ortamı Hindistan, Pakistan, Bangladeş ve
Güneydoğu Himalayalar olan tropikal bir balıktır.
Genellikle durgun ve temiz ve bol oksijenli sularda
yaşarlar. Gövdelerinde 7-9 adet gümüş rengi ve mavi
çizgiler vardır. Zebra balıkları su sıcaklığı bakımından
geniş bir yelpazede yaşayabilir. 18-30°C aralığında bir
sorun olmadan hayatını sürdürebilmektedir. Zebra
balıklarının üremeleri oldukça kolaydır. Üremeleri için
ideal sıcaklık 26-28°C’dir.
Zebra balığında embriyo gelişimi; zigot, segmentasyon
(yarıklanma), blastula, gastrula, faringula (geçiş evresi)
ile kuluçka ve larval evreler olmak üzere 7 evredir.
Polilesital tipteki zebra balığı yumurtası döllendikten
sonra 45. dakikaya kadar olan evre zigot evresidir.
Zigottaki ilk bölünme 45. dakika itibariyle gerçekleşir.
Bölünme gerçekleştikten sonra blastomerler her 15
dakikada bir bölünürler. Yani fertilizasyondan 1 saat
sonra 4 blastomer vardır. Bölünmeler meroblastik
tiptedir [1].
Blastula, blastodiskin top gibi küre halinde gözüktüğü
aşamada embriyoya verilen isimdir. Bu aşama,
embriyonun 128 blastomerli aşaması ya da diğer bir
değişle 8. zigotik hücre döngüsünün gerçekleştiği
aşamadır. Blastula aşaması gastrula başlangıcına kadar
devam eder. Gastrula evresi, döllenmeden sonra 5. ve
24. saatler arasında gerçekleşen evredir. Gastrula
evresinde epiboli şeklinde gastrulasyon gözlenir.
İnvolüsyon, gastrulasyonun başlangıcı olarak kabul
edilir. Gastrulasyonda gerçekleşen en önemli olaylar
kuyruk tomurcuğu ve germ halkasının oluşmasıdır.
Gastrulasyonda baş bölgesi belirginleşir ve vitellus
küçülmeye başlar. Bu evre sonunda somitlerin oluşumu
tamamlanır. Döllenmenin gerçekleşmesinden sonraki
24. ve 48. saatler arasındaki evre faringula evresidir. Bu
evrede yüzgeçler şekillenmeye başlar, pigment hücreleri
farklılaşır, beyin taslağı oluşur. Dolaşım sistemi oluşur
ve kalp atmaya başlar. Zebra balığında kuluçka evresi
48. saatten itibaren başlar. Gittikçe gelişimini
tamamlayan embriyoda vitellus kesesi küçülür [1].
Zebra balığı embriyoları 3. günden itibaren koryondan
çıkar ve bu evre larval evre olarak adlandırılır. Zebra
balığı, gelişiminin 3. ayında ergin döneme ulaşır.
Endokrin bozucu kimyasallar (EDCs); sağlıklı bir
organizmada veya onun gelecekteki neslinde endokrin
sistemine dahil olarak ve onun çalışmasını değiştirerek
endokrin sistemin fonksiyonunu bozan, gelişim, üreme,
sinir ve immün sistem üzerine olumsuz etkilere sebep
olup sağlık sorunlarına neden olan dışarıdan alınan
madde veya madde karışımlarıdır.
Endokrin bozucu bileşikler, doğal hormonlar ve yapay
endokrin bozucular olmak üzere 2 başlık altında
incelenebilir. Doğal endokrin bozucular, yarı ömürleri
kısa olduğundan organizmadan kolayca atılabilen ve
genellikle önemli yan etkilere sahip olmayan
bileşiklerdir. Doğal endokrin bozuculara fitoöstrojenler
örnek verilebilir. Yapay endokrin bozucular ise tarım ve
endüstride oldukça fazla kullanılan bileşiklerdir.
Bunlara örnek olarak dietilstilbesterol (DES), bisfenol A
(2,2-bis(4-hidroksifenil) propan) (BPA), oktilfenol,
fitalatlar, dioksin ve dioksin benzeri bileşikler,
poliklorine bifeniller, DDT ve bazı pestisitler örnek
verilebilir. Bu kimyasallar evsel ve endüstriyel atıklarla
sucul ortama katılmaktadır [2,3].
Endokrin bozucular, her zaman aynı etkiye neden
olmamaktadır. Örneğin düşük dozda östrojen
reseptörlerine bağlanarak etki gösteren bir bozucu,
yüksek dozda ise androjen reseptörlerine bağlanarak
antiandrojenik etki gösterebilir [4]. Endokrin bozucu ile
karşılaşma süresine, miktarına, tek veya karışım
maddeler ile karşılaşma durumuna göre endokrin
bozucuların etkileri değişebilmektedir. Bu açıdan en
hassas dönemler gebelik, çocukluk ve ergenliktir.
Gebelikte endokrin sistemin işlevini bozan çeşitli
kimyasal maddelerle karşılaşma; fetusun endokrin
sistemini etkileyerek, çok sayıda gelişme bozukluğuna
sebep olmaktadır. Bu kimyasal maddelerin çoğu
plasentada etkisiz hale getirilemezler. Kimyasal
maddelerin miktarı ne kadar fazla olursa, ortaya çıkan
gelişim bozukluğunun derecesi de o kadar ağır
olmaktadır [5].
Bisfenol A’daki “A” harfi asetondan gelir [6]. İlk olarak
Dodds ve Lawson tarafından 1930’lu yıllarda pek çok
organik bileşik ratlara subkutanöz (cilt altı) enjeksiyon
uygulamasıyla verilmiş ve böylece BPA’nın sentetik
östrojen olduğu belirlenmiştir. Bu çalışma sonucunda
araştırıcılar alifatik bir grupla bağlı 2 fenolik halka
içeren kimyasalların östrojenik aktiviteye sahip
olduğunu (Şekil 1.) tespit etmişlerdir [7].
Şekil 1. Bisfenol A’nın yapısı

Bisfenol A’nın Zebra Balıklarında (Danio Rerio) Teratolojik
Etkileri
C. Akbulut, N. D. Yön
SAU J. Sci. Vol 17, No 1, p. 105-111, 2013 107
En önemli endokrin bozuculardan biri olan 2,2 bis(4-
hidroksifenil) propan yani Bisfenol A (BPA), 2 mol
fenol ve 1 mol asetonun asit kataliz reaksiyonu sonucu
oluşan ve 2 tane doymamış fenol halkasına sahip olan
bir bileşiktir (Şekil 2.) [8].
Şekil 2. Bisfenol A’nın fenol ve asetondan kondensasyonu
BPA, katı, beyaz renkte kristal yapıda fenolik bir
maddedir. Molekül formülü C15H16O2’dir.
Dimetilsülfoksit (DMSO), etanol ve aseton gibi
çözücülerde iyi çözünür. 25ºC’deki suda 120 mg/L
oranında çözünür [9,10].
BPA, konserve ve plastik ürünlerde bulunan, epoksi ve
polistiren reçine üretiminde ve kimyasal endüstride
oldukça fazla kullanılan endokrin bozucu bir maddedir.
BPA, endüstriyel olarak, polimer, epoksi rezin,
polisülfon, kauçuk, fungusit, antioksidan ve boya
imalatında ara bileşik olarak kullanılmaktadır ve bu
amaçla üretilen BPA’nın %95’i polikarbonat
plastiklerin imalatında kullanılmaktadır [11]. Artan
polikarbonat üretimine paralel olarak BPA üretimi de
günümüzde hızla artmaktadır. BPA, polikarbonatın
hidrolizi sonucu ortama salınmaktadır. Diğer bir değişle
BPA, bir polikarbonat monomeridir. polikarbonat ve
rezinlerde BPA monomerleri birbirine ester bağı ile
bağlıdır. Epoksi rezinler, metal maddeleri kaplamada,
konservelerde ve diş dolgularında bulunmaktadır.
Bunun yanı sıra BPA, konservelerin iç yüzeylerinde,
bebek biberonlarında, plastik su şişelerinde ve
damacanalarda, bebek şampuan ve kremlerinde, çoğu
oyuncakların yapısında, parfümeri ve kozmetik
ürünlerde, optik lenslerde, CD’lerin dış film
kaplamasında, baskılı kıyafetlerde ve oda parfümlerinde
bulunmaktadır. [8,12,13].
BPA günümüzde oldukça fazla üretilen ve plastik
yapısında bulunan bir madde olduğu için insanlar da
dahil olmak üzere pek çok canlı grubu bu maddeye
maruz kalmaktadır. Buna bağlı olarak sucul sisteme
BPA girişi de hızla artmakta ve pek çok sucul
organizma bu östrojenik maddeden etkilenmektedir.
Çalışmamızda düşük dozlardaki BPA’nın zebra balığı
embriyo ve larvaları üzerine olan teratolojik etkilerinin
incelenmesi hedeflenmiştir.
2. MATERYAL VE METOD
2.1 Zebra balığı (Danio rerio)
Zebra balığı, gelişim biyolojisi çalışmalarında
kullanılan önemli bir omurgalı modelidir ve zebra balığı
ile çalışmanın pek çok avantajı vardır. Bu organizmaları
laboratuvar ortamında üretmek ve üretimlerini devam
ettirmek kolaydır ve dikkate değer deneysel avantajlar
sunar. Ayrıca bu organizmaların üretimi de ucuzdur. Bir
zebra balığı 50 ila 200 arasında yumurta bırakır.
Döllendikten sonra hızlı bir şekilde gelişen embriyo
şeffaf olduğundan gelişimin her aşamasını mikroskop
altında görmek mümkündür. Ayrıca insanla pek çok
ortak gene sahip olan zebra balıklarının erginleşme
süreleri de diğer omurgalılara göre oldukça kısadır.
Yumurtalar elverişli ortam şartlarında 3 ayda cinsel
olgunluğa erişirler [14]. Model organizmalar, üzerinde
çalışılması zor olan diğer türler hakkında (insan da
dahil) biyolojik olayların araştırılması ve bilgi edinmek
için kullanılır. Bu yüzden çalışmada model organizma
olarak zebra balığı seçilmiştir.
2.2 Ortam Koşulları
Sakarya Üniversitesi Fen Edebiyat Fakültesi Biyoloji
Bölümü Araştırma Laboratuvarı içerisine zebra balığı
ile yapılacak deneyler için 10x20x35 cm boyutlarında
akvaryumlar kuruldu. Akvaryumların içerisine içme
suyu konulup sıcaklık, termostatlar ile 26 - 28 ºC ’ye
sabitlendi. Akvaryum içerisindeki sular, hava motorları
ile oksijenlendirildi. Ayrıca oda içerisine 14 saat
aydınlık, 10 saat karanlık olacak şekilde aydınlatma
sistemi kurularak balıkların üremesi için gereken
sirkadien ritm oluşturuldu. Üreyebilecek olgunluğa
ulaşan balıklar akşam yumurtlama kaplarına alındı ve
sabah embriyolar toplanarak stereo mikroskop altında
incelendi.
2.3 BPA Uygulaması
Döllenmiş olan zebra balığı yumurtaları, yumurtlama
kaplarından alınarak kontrol, çözücü kontrol ve deney
grupları oluşturuldu. Kontrol grubuna hiçbir uygulama
yapılmazken, çözücü kontrol grubuna BPA’nın
çözücüsü olan dimetilsülfoksit (DMSO) %1 oranında
embriyoların bulunduğu 25x45x15 cm boyutlarındaki
yavrular için kullanılan akvaryum ortamına eklendi. 4
mg/L ve 8 mg/L BPA olmak üzere 2 deney grubu
oluşturuldu. 4 mg/L ve 8 mg/L oranındaki BPA dozları
%1 DMSO içerisinde çözülerek akvaryum ortamına
verildi. Tüm bu DMSO ve BPA uygulamaları
embriyolara gelişimin ilk 1 saatlik periyodu içerisinde
uygulandı. Embriyoların gelişimi her gün stereo
mikroskop altında gözlenerek fotoğraflandı.

C. Akbulut, N. D. Yön Bisfenol A’nın Zebra Balıklarında (Danio Rerio) Teratolojik
Etkileri
108 SAU J. Sci. Vol 17, No 1, p. 105-111, 2013
3. SONUÇLAR
3.1 Kontrol Grubu
Döllenmiş yumurtalar stereo mikroskop altında şeffaf
görünürken, döllenmemiş yumurtalar opak bir
görünüme sahipti (Şekil 3a). Döllenmiş zebra balığı
embriyolarında koryon kolaylıkla seçilebiliyordu. Zebra
balığı embriyolarında döllenmeden sonra ilk yarım saat
içerisinde blastodisk oluşum gözlendi. (Şekil 3b.) İlk
bölünme döllenmeden sonra 45. dakikada izlendi. İlk
bölünmeden sonra blastomerlerin 15 dakikada bir
bölündüğü gözlendi. Blastomerler bu şekilde
bölünmelerine devam ettiler. Segmentasyon
aşamalarından sonra gastrulasyonun epiboli şeklinde
gerçekleştiği gözlendi. Gelişimin 1. Gününde somit
oluşumunun tamamlandığı, baş ve kuyruk bölgelerinin
oluştuğu gözlendi (Şekil 4). Döllenmeden sonra 2.
günde pigmentasyon oluşumu gözlendi. Embriyonun
kalp atışları stereo mikroskop altında izlendi (Şekil 5).
Şekil 3. a) Döllenmemiş zebra balığı yumurtası b) Döllenmiş zebra
balığı yumurtası
Şekil 4. a) Kontrol grubu, dekoryonize edilmemiş 1 günlük zebra
balığı embriyosu; b: baş bölgesi s: somitler, k: kuyruk, ko: koryon v:
vitellüs b) Bouin ile fikse edilip dekoryonize edilmiş 1 günlük zebra
balığı embriyosu; b: baş bölgesi, k: kuyruk, v: vitellüs
Şekil 5. 2 günlük zebra balığı embriyosu
3.2 Çözücü Kontrol Grubu
Morfolojik açıdan incelendiğinde gelişim sürecinde
kontrol ve çözücü kontrol grupları arasında fark
gözlenmedi. Çözücü kontrol grubunda da kontrol
grubundaki gibi normal bir gelişim izlendi (Şekil 6).
Şekil 6. Çözücü kontrol grubu, a) 1 günlük embriyo (Bouin ile fiske
edilip fotoğraflanmıştır) b) 2 günlük embriyo (Bouin ile fiske edilip
fotoğraflanmıştır) c) 3 günlük embriyo (Bouin ile fiske edilip fotoğraflanmıştır) d) 6 günlük prelarva
3.3 4 mg/L BPA Uygulaması Yapılmış Grup
Kontrol grupları gelişimlerini normal bir şekilde
sürdürürken 4 mg/L BPA uygulaması yapılan gruptaki
embriyo ve larvalar ancak 13 gün boyunca yaşadı. 4
mg/L BPA uygulaması yapılmış zebra balığı
embriyoları kontrol ve çözücü kontrol grupları ile
karşılaştırıldığında gelişimin 1. gününde baş ve kuyruk
oluşumunda gecikmeler (Şekil 7a), 2. gününde
pigmentasyon oluşumunda gecikmeler görüldü (Şekil
7b). Aynı zamanda bu embriyoların koryondan çıkış
zamanlarında da gecikmeler görüldü (Şekil 7c). Bazı
embriyoların gelişimin 5.ve 6. günlerinde koryondan
çıkabildikleri tespit edildi. Bunun yanında birçok
larvada anormal kuyruk oluşumları gözlendi (Şekil 7d).
Buna paralel olarak kuyruk şeklinde kıvrılmalar olduğu
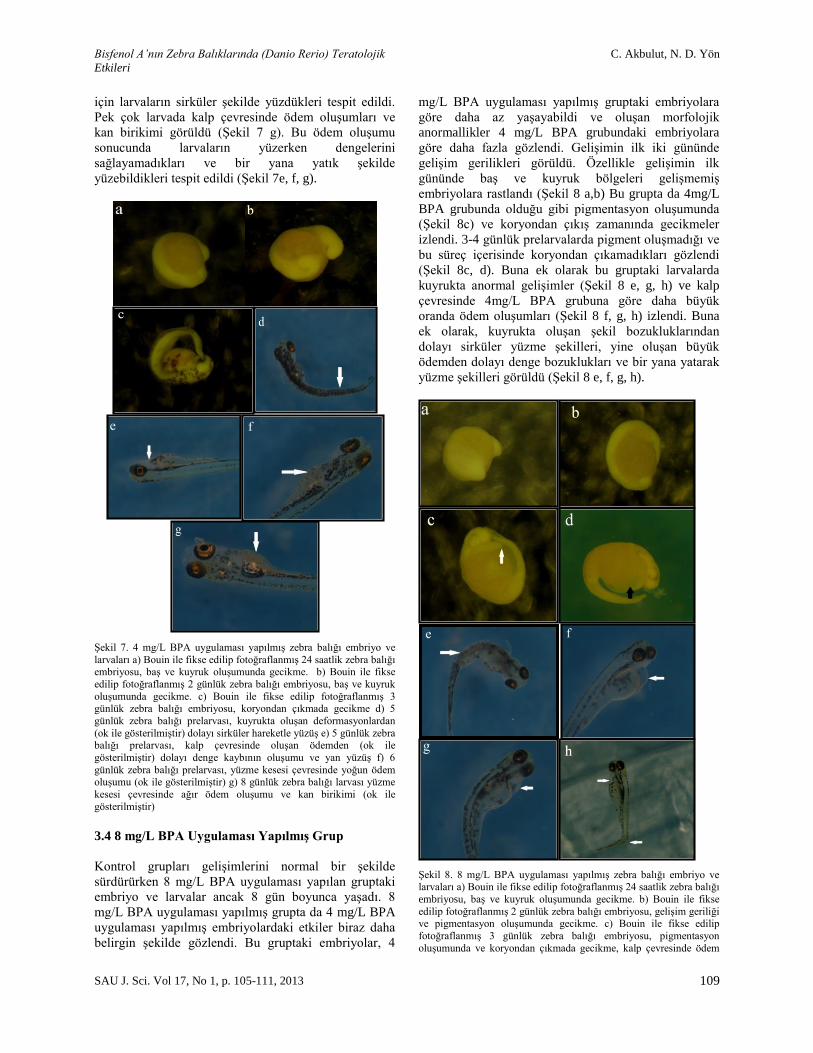
Bisfenol A’nın Zebra Balıklarında (Danio Rerio) Teratolojik
Etkileri
C. Akbulut, N. D. Yön
SAU J. Sci. Vol 17, No 1, p. 105-111, 2013 109
için larvaların sirküler şekilde yüzdükleri tespit edildi.
Pek çok larvada kalp çevresinde ödem oluşumları ve
kan birikimi görüldü (Şekil 7 g). Bu ödem oluşumu
sonucunda larvaların yüzerken dengelerini
sağlayamadıkları ve bir yana yatık şekilde
yüzebildikleri tespit edildi (Şekil 7e, f, g).
Şekil 7. 4 mg/L BPA uygulaması yapılmış zebra balığı embriyo ve
larvaları a) Bouin ile fikse edilip fotoğraflanmış 24 saatlik zebra balığı embriyosu, baş ve kuyruk oluşumunda gecikme. b) Bouin ile fikse
edilip fotoğraflanmış 2 günlük zebra balığı embriyosu, baş ve kuyruk
oluşumunda gecikme. c) Bouin ile fikse edilip fotoğraflanmış 3 günlük zebra balığı embriyosu, koryondan çıkmada gecikme d) 5
günlük zebra balığı prelarvası, kuyrukta oluşan deformasyonlardan
(ok ile gösterilmiştir) dolayı sirküler hareketle yüzüş e) 5 günlük zebra balığı prelarvası, kalp çevresinde oluşan ödemden (ok ile
gösterilmiştir) dolayı denge kaybının oluşumu ve yan yüzüş f) 6
günlük zebra balığı prelarvası, yüzme kesesi çevresinde yoğun ödem oluşumu (ok ile gösterilmiştir) g) 8 günlük zebra balığı larvası yüzme
kesesi çevresinde ağır ödem oluşumu ve kan birikimi (ok ile
gösterilmiştir)
3.4 8 mg/L BPA Uygulaması Yapılmış Grup
Kontrol grupları gelişimlerini normal bir şekilde
sürdürürken 8 mg/L BPA uygulaması yapılan gruptaki
embriyo ve larvalar ancak 8 gün boyunca yaşadı. 8
mg/L BPA uygulaması yapılmış grupta da 4 mg/L BPA
uygulaması yapılmış embriyolardaki etkiler biraz daha
belirgin şekilde gözlendi. Bu gruptaki embriyolar, 4
mg/L BPA uygulaması yapılmış gruptaki embriyolara
göre daha az yaşayabildi ve oluşan morfolojik
anormallikler 4 mg/L BPA grubundaki embriyolara
göre daha fazla gözlendi. Gelişimin ilk iki gününde
gelişim gerilikleri görüldü. Özellikle gelişimin ilk
gününde baş ve kuyruk bölgeleri gelişmemiş
embriyolara rastlandı (Şekil 8 a,b) Bu grupta da 4mg/L
BPA grubunda olduğu gibi pigmentasyon oluşumunda
(Şekil 8c) ve koryondan çıkış zamanında gecikmeler
izlendi. 3-4 günlük prelarvalarda pigment oluşmadığı ve
bu süreç içerisinde koryondan çıkamadıkları gözlendi
(Şekil 8c, d). Buna ek olarak bu gruptaki larvalarda
kuyrukta anormal gelişimler (Şekil 8 e, g, h) ve kalp
çevresinde 4mg/L BPA grubuna göre daha büyük
oranda ödem oluşumları (Şekil 8 f, g, h) izlendi. Buna
ek olarak, kuyrukta oluşan şekil bozukluklarından
dolayı sirküler yüzme şekilleri, yine oluşan büyük
ödemden dolayı denge bozuklukları ve bir yana yatarak
yüzme şekilleri görüldü (Şekil 8 e, f, g, h).
Şekil 8. 8 mg/L BPA uygulaması yapılmış zebra balığı embriyo ve larvaları a) Bouin ile fikse edilip fotoğraflanmış 24 saatlik zebra balığı
embriyosu, baş ve kuyruk oluşumunda gecikme. b) Bouin ile fikse
edilip fotoğraflanmış 2 günlük zebra balığı embriyosu, gelişim geriliği ve pigmentasyon oluşumunda gecikme. c) Bouin ile fikse edilip
fotoğraflanmış 3 günlük zebra balığı embriyosu, pigmentasyon
oluşumunda ve koryondan çıkmada gecikme, kalp çevresinde ödem

C. Akbulut, N. D. Yön Bisfenol A’nın Zebra Balıklarında (Danio Rerio) Teratolojik
Etkileri
110 SAU J. Sci. Vol 17, No 1, p. 105-111, 2013
oluşumu (ok ile gösterilmiştir) d) Bouin ile fikse edilip fotoğraflanmış
4 günlük zebra balığı prelarvası, kalp çevresinde ödem oluşumu (ok
ile gösterilmiştir) e) 5 günlük zebra balığı prelarvası, kuyrukta
bükülmeler (ok ile gösterilmiştir) f) 5 günlük zebra balığı prelarvası, kalp çevresinde oluşan ödem (ok ile gösterilmiştir) g) 6 günlük zebra
balığı prelarvası, kalp çevresinde oluşan ödem (ok ile gösterilmiştir h)
7 günlük zebra balığı prelarvası, kalp çevresinde oluşan ödem (ok ile gösterilmiştir)ve kuyrukta bükülme (ok ile gösterilmiştir)
4. TARTIŞMA
Bu çalışmada çevresel östrojenlerden BPA’nın zebra
balığı embriyo ve larvalarındaki teratolojik etkileri
incelenmiştir. Laboratuvar koşullarında yetiştirilip anaç
balıklardan elde edilen embriyolara düşük dozlarda
BPA uygulanmıştır. BPA uygulaması zigotlara ilk 1
saatlik zaman diliminde uygulanmıştır. Embriyo
gelişimleri her gün stereo mikroskop altında
gözlemlenerek fotoğraflanmıştır.
Duan ve Zhu [15] tarafından yapılan çalışmada 2, 4, 6,
8, 10, 15, 18, 22 ve 25 mg/L lik dozlarda BPA zebra
balığı embriyolarına uygulanmış ve embriyolar 72 saat
boyunca gözlemlenerek toksik etkileri saptanmıştır.
Çalışma 3 kısma bölünmüş ve BPA uygulaması 0. saat,
8. saat ve 24. saatte yapılmıştır. 0. ve 8. saat itibari ile
BPA uygulaması yapılan gruplar arasında toksik etki
olarak bir fark bulunmazken 24. saat itibariyle BPA
uygulaması yapılan gruplarda 0. ve 8. saatte uygulama
yapılan gruplara göre toksik etkinin daha az olduğu
gözlenmiştir. Bu çalışmada BPA, etanol içerisinde
çözülerek embriyo ortamına uygulanmıştır. Bu çalışma
sonucunda 24 saatlik zebra balığı embriyoları için letal
konsantrasyon (LC50) değeri 16,36 ± 0,60 mg/L olarak
tespit edilmiştir. Düşük dozlarda koryondan çıkmada
gecikmeler ve kan birikimleri gözlemlenirken, yüksek
dozlarda kist oluşumları, eksen eğirlikleri, kuyruk
malformasyonları ve ölümler gözlenmiştir. Bizim
çalışmamızda düşük doz olan 4 ve 8 mg/L lik dozlar
seçilmiş ve bu çalışmadan farklı olarak BPA etanol
içerisinde değil %1 oranında DMSO içerisinde
çözülerek embriyo ortamına verilmiştir. Bizim
çalışmamızda düşük doz uygulanmasına rağmen Duan
ve Zhu [15]’ nun yaptığı çalışmadan farklı olarak 4
mg/L ve 8 mg/L BPA uygulanmış dozlarda kuyrukta
deformasyonlar, ölümler, kalp çevresinde ve vitellus
kesesinde ödem oluşumları, koryondan çıkma
sürelerinde gecikmeler ve pigmentasyon oluşumlarında
gecikmeler tespit edilmiştir.
BPA’nın gelişim ve üreme üzerine olan toksik etkileri
uzun yıllar boyunca bilim insanlarının en çok merak
ettiği araştırma konuları arasında yerini almıştır ve
farklı canlılarda da BPA’nın gelişim üzerine etkisi
incelenmiştir. BPA’nın östrojen reseptörüne bağlanma
afinitesi estradiole göre 1000-5000 kez daha düşüktür
[16]. Bu nedenle BPA, in vitro koşullarda zayıf bir
östrojen olarak davranır. BPA’nın in vivo etkileri
üzerine de araştırmalar yapılmıştır. F344 ratlara 3 gün
boyunca 0,3 mg/kg BPA içeren tabletler verilmiş ve 3
gün sonunda bu ratlarda aşırı büyüme, uterusta
hiperplazi ve mukus salgısında artış ve vajina epitelinde
keratinleşme tespit etmişlerdir [17]. Lawson ve
arkadaşlarının [18] yaptığı çalışmada C57BL/6J ırkı
hamile farelere, hamileliğin 11. gününden itibaren her
gün 20 ng BPA/g ağız yoluyla verilmiştir. BPA’nın 12.,
12,5., 13,5. ve 14,5. günlerdeki fetal ovaryuma olan
etkilerini gözlemlemek için hamile fareler BPA
uygulamasının 1., 1,5., 2,5., ve 3,5. günlerinde
öldürülmüş, fetüsler uterustan alınmış ve fetal
ovaryumlar izole edilmiştir. Bu çalışma sonucunda
hamile bireylere BPA uygulamasının gelişmekte olan
fetal ovaryumunda oogenezi etkilediği, mayotik
hasarlara ve kromozom anomalilerine sebep olduğu
bulunmuştur.
2,3,7,8-Tetraklorodibenzo-p-dioksinin (TCDD) zebra
balığı embriyoları üzerine oluşturduğu etkiyi araştıran
bir araştırmada 24 saatlik zebra balığı embriyolarına
0.1, 0.3, 0.5 ve 1.0 ppb oranında TCDD uygulaması
yapılmış ve TCDD uygulamasının beyin damarlarında
kan akışını ciddi ölçüde yavaşlattığı tespit edilmiştir.
Yapılan TUNEL deneyleriyle TCDD’nin 24 saatlik
zebra balığı embriyolarının orta beyin kısmında
apoptoza sebep olduğu gösterilmiştir [19].
Willey ve Krone [20] tarafından yapılan çalışmada
zebra balığı embriyolarına yüksek dozda (10-7 M)
endosülfan ve nonilfenol uygulaması yapılarak zebra
balığı embriyo ve prelarvalarındaki değişimler
gözlenmiştir. Endosülfan ve nonilfenol uygulamaları
döllenmeden sonraki 2. saatte yapılmıştır. Endosülfan
uygulaması sonucunda 3-4 günlük zebra balığı
prelarvalarında anormal dairesel yüzüş, omurgada
anormallikler ve gövde ekseninde eğrilmeler tespit
edilmiştir. Hem endosülfan hem nonilfenol uygulaması
sonucunda prelarvalarda ödem oluşumları, mikrosephali
(baş oluşumunun normalden küçük olması) ve harekette
yavaşlama tespit edilmiştir. Bu çalışmada görülen ödem
oluşumları, dairesel yüzüş şekilleri, omurgada
anormallikler ve gövde ekseninde eğrilmeler bizim
çalışmamızda elde ettiğimiz bulgularla benzerlik
göstermektedir.
Sonuç olarak, endokrin bozucuların düşük dozlarının
bile canlılarda üreme üzerine olan olumsuz etkileri
çeşitli çalışmalarla ispatlanmıştır. Düşük dozlarda olsa
bile BPA’nın ekosisteme girmesi pek çok canlıya zarar
vermektedir. Bu bağlamda BPA maruziyetinden
mümkün olduğunca kaçınılmalıdır.

Bisfenol A’nın Zebra Balıklarında (Danio Rerio) Teratolojik
Etkileri
C. Akbulut, N. D. Yön
SAU J. Sci. Vol 17, No 1, p. 105-111, 2013 111
KAYNAKLAR
[1] KIMMEL, C.B., BALLARD W.W., KIMMEL S.R.,
ULLMANN B., SCHILLING T.F., Stages of
Embryonic Development of Zebrafish, Developmental
Dynamics, 203: 253-310, 1995.
[2] GOLDMAN, JM., LAWS, SC., BALCHAK, SK.,
COOPER, RL., KAVLOCK, RJ., Endocrine-disrupting
Chemicals: Pre-pubertal Exposures and Effects on
Sexual Maturation and Thyroid Activity in the Female
Rat. A Focus on the Edstac Recommendations, Critical
Reviews in Toxicology, 30: 135-196, 2000.
[3] STOKER, TE., PARKS, LG., GRAY,
LE., COOPER, RL., Endocrine-disrupting chemicals:
Prepubertal exposures and effects on sexual maturation
and thyroid function in the male rat, A focus on the
EDSTAC recommendations, Endocrine Disrupter
Screening and Testing Advisory Committee, Critical
Reviews in Toxicology, 30: 197–252, 2000.
[4] LEE, MM., Endocrine Disrupters, A Current Review
of Pediatric Endocrinology, 109-118, 2007.
[5] DURMAZ, E., ÖZMERT, EN., Fitalatlar ve Çocuk
Sağlığı, Çocuk Sağlığı ve Hastalıkları Dergisi, 53: 305-
317, 2010.
[6] DIANIN, AP., Zhurnal russkogo fiziko-
khimicheskogo obshchestva. 23, 492, 1891.
[7] DODDS, E., LAWSON, W., Synthetic, oestrogenic
agents without the phenanthrene nucleus, Nature, 137:
996, 1936.
[8] STAPLES, CA., DORN, PB., KLECKA, GM.,
O’BLOCK, ST., A Review of The Environmental Fate,
Effects and Exposures of Bisphenol A, Chemosphere,
36(10): 2149- 2173, 1998.
[9] JOHNSON, I., HARVEY, P., Study on The
Scientific Evaluation of 12 Substances In The Context
of Endocrine Disrupter Priority List of Actions
European Commission, Wrc-Nsf Ref: Uc 6052, 2002.
[10] KOSKY, P.E., GUGGENHEİM, E.K., The
Aqueous Phase in the Interfacial Sythesis of
Polycarbonates. 1. Ionic Equilibra and Experhnental
Solubilities in the BPA-NaOH-H2O System Industrial
and. Engineering. Chemistry. Research. 30(3): 462-467,
1991.
[11] MIHAICH, E.M., FRIDERICH, U., CASPERS, N.,
HALL, A.T., KLECKA, G.M., DIMOND, S.S,
STAPLES, C.A., ORTEGO, L.S., HENTGES, S.G.,
Acute and chronic toxicity testing of bisphenol A with
aquatic invertebratas and plants, Ecotoxicology and
Environmental Safety, 72: 1392-1399, 2009.
[12] HENGSTLER, J G., FOTH, H., GEBEL, T.,
KRAMER, PJ., LILIENBLUM, W.,
SCHWEINFURTH, H., VÖLKEL, W., WOLLIN, KM.,
GUNDERT-REMY, U., Critical Evaluation of Eey
evidence on The Human Health Hazards of Exposure to
Bisphenol A, Critical Reviews in Toxicology, 41(4):
263-291,2011.
[13] WELSHONS, WV., NAGEL, SC., VOM SAAL,
FS., Large Effects from Small Exposures. III. Endocrine
Mechanisms Mediating Effects of Bisphenol A at
Levels of Human Exposure, Endocrinology 147(6): 56-
69, 2006.
[14] MILLS, D., Akvaryum Bakımı, İnkılap Kitabevi,
İstanbul, Türkiye, 1994.
[15] DUAN, ZH., ZHU, L., Toxicity of Bisphenol A on
the Growth of zebrafish Embryos, Acta Hydrobiologica
Sinica, 30:6, 638-642, 2006.
[16] DODGE, JA., GLASEBROOK, AL., MAGEE,
DE., ve ark., Environmental estrogens: effects on
cholesterol lowering and bone in the ovariectomized rat,
The Journal of Steroid Biochemistry and Molecular
Biology, 59: 155-161, 1996.
[17] COLERANGLE, JB., ROY, D., Profound effects
of the weak environmental estrogen-like chemical
bisphenol a on the growth of the mammary gland of
Noble rats, The Journal of Steroid Biochemistry and
Molecular Biology, 60: 153-160, 1997.
[18] LAWSON, C., GIESKE, M., MURDOCH, B., YE,
P., LI, Y., HASSOLD, T., HUNT, P., Gene expression
in the fetal Mouse ovary is altered by exposure to low
doses of bisphenol A, Biology of Reproduction, 84(1):
79-86, 2010.
[19] DONG, W., TERAOKA, H., YAMAZAKİ, K.,
TSUKİYAMA, S., IMANİ, S., IMAGAWA, T.,
STEGEMAN, JJ., PETERSON, RE., HİRAGA, T.,
2,3,7,8-Tetrachlorodibenzo-p-dioxin Toxicity in the
Zebrafish Embryo: Local Circulation Failure in the
Dorsal Midbrain Is Associated with Increased
Apoptosis, Toxicological Sciences, 69(1): 191-201,
2002.
[20] WILLEY, JB., KRONE PH., Effects of endosulfan
and nonylphenol on the primordial germ cell population
in pre-larval zebrafish embryos, Aquatic Toxicology,
54(1-2): 113-123, 2001.


SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 113-118, 2013 SAU J. Sci. Vol 17, No 1, p. 113-118, 2013
113
Sabit olmayan ortalama eğrilikli timelike bonnet yüzeyler
Soley ERSOY*, Kemal EREN2
1*Sakarya Üniversitesi, Fen Edebiyat Fakültesi,Matematik Bölümü, SAKARYA
2Kabataş Lisesi, ORDU
02.05.2012 Geliş/Received, 13.12.2012 Kabul/Accepted
ÖZET
Bu çalışmada, 3-boyutlu Minkowski uzayında [11]’de verilen bir timelike yüzeyin Bonnet yüzey olma kriteri göz
önüne alındı ve [6]’da I. M. Roussos’un Öklid uzayında yaptığı sınıflandırmaya benzer şekilde Minkowski uzayında
Bonnet yüzey olan timelike yüzeyler 1C , 2C ve 3C olmak üzere üç farklı sınıfta incelendi. 1C de verilen timelike
yüzeyler sabit ortalama eğrilikli olup bu durum [11]’de ayrıntılı olarak incelenmiştir. Bu çalışmada ise 2C ve 3C
durumları incelerek sabit olmayan ortalama eğrilikli timelike yüzeylerin Bonnet yüzey olma kriteri belirlendi.
Anahtar Kelimeler: Timelike Bonnet yüzeyler, ortalama eğrilik, Gauss eğriliği, izometri
Timelike bonnet surfaces with non-constant curvature
ABSTRACT
In this study, the criterion of a timelike surface being Bonnet surface in 3-dimensional Minkowski space given by
[11] is taken into consideration and by a similar manner of the classification of surfaces in Euclidean space done by
I. M. Roussos in [6], timelike surfaces as Bonnet surfaces are investigated in three class as 1C , 2C and 3C . Timelike
surfaces given in the case of 1C have constant mean curvature and were investigated by a detailed way in [11]. In the
present study, by investigating the cases of 2C and 3C , a criterion of the timelike surfaces with non-constant mean
curvature being Bonnet surfaces is determined.
Keywords: Timelike Bonnet surfaces, mean curvature, Gaussian curvature, isometry
* Sorumlu Yazar / Corresponding Author

S. Ersoy, K. Eren Sabit Olmayan Ortalama Eğrilikli Timelike Bonnet Yüzeyler
114 SAU J. Sci. Vol 17, No 1, p. 113-118, 2013
1. GİRİŞ
3-boyutlu Öklid uzayında ortalama eğriliği koruyan bir
izometrik deformasyon kabul eden yüzeye Bonnet
yüzey adı verilir. Literatürde konu ile ilgili pek çok
çalışma var olup ilk çalışma 1987 de O. Bonnet
tarafından yapılmıştır. O. Bonnet, [1] de yüzeyin
ortalama eğrilik korunarak izometrik olarak tasvir
edilmesi probleminin genel halde çözülebilir olmadığını
sabit ortalama eğrilikli yüzeylerin birbirine izometrik
olarak tasvir edilebildiğini göstermiştir. Bu nitelikteki
yüzeylerle ilgili daha detaylı sonuçları ise E.Cartan [2]
çalışmasında elde etmiştir.
B. H. Lawson, Bonnet’in sonuçlarını sabit eğrilikli
Riemann uzayında sabit ortalama eğrilikli yüzeylere
genişletmiş ve sabit olmayan ortalama eğrilikli Bonnet
yüzeylerin altı keyfi sabite bağlı olduğunu göstermiştir
[3].
S. S. Chern asli eğrilikleri koruyan yüzeylerin izometrik
deformasyonu için diferansiyel formlar yardımıyla bir
karakterizasyon elde etmiştir [4].
Konu ile ilgili pek çok çalışması olan I. M. Roussos,
sırasıyla, [5], [6] ve [7] çalışmalarında helikodial yüzey
olan Bonnet yüzeyleri, tanjant açılabilir olan Bonnet
yüzeyleri ve Bonnet yüzeyler üzerinde global sonuçları
araştırmıştır. I. M. Roussos, Chern’in yöntemini
kullanarak ortalama eğriliği koruyan izometri için bir
karakterizasyon verilmiştir.
Z. Soyuçok bir yüzeyin Bonnet yüzey olması için özel
bir izotermal parametreli sisteme sahip olmasının gerek
ve yeter koşul olduğunu göstermiştir [8].
Ayrıca Z. Soyuçok bir diğer çalışmasında 4-boyutlu
Öklid uzayında 3-boyutlu bir hiperyüzeyin Bonnet
yüzeyi olması için gerek ve yeter koşulun ortogonal
şebekeye sahip olması gerektiğini kanıtlamıştır [9].
Z. Soyuçok danışmanlığında H. Bağdatlı, bir
hiperyüzeyin ortalama eğriliğini koruyan izometrisi
problemini [10] doktora tezinde ele almıştır ve 1n
de
bir hiperyüzeyin bir Bonnet hiperyüzeyi olması için
gerek ve yeter koşulun A-şebekesi adı verilen özel bir
ortogonal şebekeye sahip olması gerektiğini
göstermiştir.
2. TEMEL KAVRAMLAR
i3
1, 3-boyutlu Minkowski uzayı ve M de umbilik nokta
içermeyen timelike yüzey olsun. p M noktasında
1 2 3{ , , }e e e ortonormal vektörler olmak üzere 1e
timelike vektör, 2e spacelike vektör ve 3e yüzeyin
normal vektörü olsun. i3
1,, 3-boyutlu Minkowski
uzayında 1 2 3, , e e e çatı alanının bağ formları i
jw ,
1 , 3i j ve dual 1-formları iw , 1 3i , olmak
üzere
1 2
1 2
2 3
1 1 2 1 3
1 3
2 2 1 2 3
1 2
3 3 1 3 2
dx w e w e
de w e w e
de w e w e
de w e w e
(2.1)
dır öyle ki 3 1 3 2 2 1
1 3 2 3 1 2, ,w w w w w w eşitlikleri vardır
[11].
M timelike yüzeyinin şekil operatörü : p pA T M T M
şeklinde verilsin. Bu durumda 1 1 2Ae ae be ,
2 1 2Ae be ce yazılabilir. M timelike yüzeyin şekil
operatörüne karşılık gelen matrisin reel öz vektörlerinin
var olması için gerek ve yeter şart
22( )
( ) 04
a cac b
ve
22 2( )
04
a cH K b
olmasıdır, öyle ki 2
a cH
ve
2K ac b , sırasıyla,
ortalama eğrilik ve Gauss eğriliğidir [11].
Çalışmamızda aksi belirtilmedikçe 2H K ve 1 2,e e
asli vektörler kabul edeceğiz. Dolayısıyla b 0 ve
2 1 2
1
3 1
1
3 2
2
w hw kw
w aw
w cw
(2.2)
olur. Burada açıkça görebiliriz ki 1e ve 2e boyunca a
ve c asli eğriliklerdir.
02
a cJ
olsun. Ayrıca M
yüzeyinin ortalama ve Gauss eğrilikleri, sırasıyla,
ve2
a cH K ac
(2.3)
dir. i3
1, de 1 2 3, ,e e e çatı alanının bağ formları
i
jw ve
dual 1-formları iw olmak üzere birinci ve ikinci tür
Cartan yapı denklemleri

Sabit Olmayan Ortalama Eğrilikli Timelike Bonnet Yüzeyler S. Ersoy, K. Eren
SAU J. Sci. Vol 17, No 1, p. 113-118, 2013 115
1 2 1
2
2 1 2
1
dw w w
dw w w
(2.4)
ve
2 3 2 1 2
1 1 3dw w w Kw w (2.5)
3 2 3 3 1 3
1 1 2 2 2 1,dw w w dw w w (2.6)
dir. Bu denklemler, sırasıyla, Gauss ve Codazzi
denklemleri olarak adlandırılır [11].
Codazzi denklemlerinde (2.2) denklemleri yerine
yazılırsa
3 1 2
1dw hcw w (2.7)
elde edilir. Ayrıca (2.2) nin ikinci denkleminin dış
türevinde (2.2) ve (2.4) ün ilk eşitlikleri yerine
yazıldığında
3 1 2 1
1dw da w ahw w (2.8)
bulunur. Benzer şekilde
3 2 1
2dw akw w (2.9)
ve
3 2 1 2
2dw dc w ckw w
(2.10)
elde edilir. Sırasıyla (2.7) ile (2.8) ve (2.9) ile (2.10)
denklemleri eşitlenerek
2 1
1 2
0,
0
da a c hw w
dc c a kw w
(2.11)
bulunur. Bu son denklem düzenlenirse
1 2
1 2
,
( )
da c a pw hw
dc a c kw qw
(2.12)
eşitlikleri elde edilir. 2
da dcdH
olduğu göz önüne
alınarak son iki eşitlikten
1 22 ( ) ( )dH a c k p w q h w
elde edilir. Burada u ve v fonksiyonları u k p ve
v q h şeklinde tanımlanırsa
1 22 ( )dH a c uw vw (2.13)
veya 1 2( )dH J uw vw bulunur. Ayrıca (2.12) de
verilen eşitlikler
1 2
1 2( )
,da
u k w hwa c
dckw v h w
a c
(2.14)
olarak düzenlenebilir. Böylece son iki eşitlik yardımıyla
1 2ln 2 ( 2 )d a c u k w v h w
(2.15)
bulunur. (2.13) denklemi dikkate alınırsa ve H nin
gradiyenti
1 2( )2
a cH gradH ue ve
olur. Buradan
2
2 2, ( )2
a cH H u v
elde edilir, öyle ki
2 2 24 , ( )H H a c u v (2.16)
veya
2 2 2, ( )H H H K u v
yazılabilir. Burada u v olsun yani, H null
olmasın. , 1sgn H H olmak üzere
2 2 2
2
,H Hu v A
H K
şeklinde yazılabilir. Hodge operatörü
2 11 2 2 1, ,w w w w (2.17)
olarak tanımlıdır. Böylece (2.2) de verilen 2
1w bağ
formuna Hodge operatörü uygulanırsa

S. Ersoy, K. Eren Sabit Olmayan Ortalama Eğrilikli Timelike Bonnet Yüzeyler
116 SAU J. Sci. Vol 17, No 1, p. 113-118, 2013
2 1 2 1 2
1w h w k w kw hw
(2.18)
bulunur.
1 1 2
2 1 2
,uw vw
vw uw
(2.19)
1 1 2
2 1 2
,uw vw
vw uw
(2.20)
olmak üzere
1 1 2 1 2 2
2 1 2 1 2 1
,u w v w vw uw
v w u w uw vw
(2.21)
ve
1 1 2 1 2 2
2 1 2 1 2 1
,u w v w vw uw
v w u w uw vw
(2.22)
eşitlikleri elde edilir. (2.21) nin ikinci eşitliği göz önüne
alınarak (2.13) denklemi yeniden düzenlenirse
12dH a c (2.23)
olarak yazılabilir. Benzer şekilde (2.18) ve (2.20)
yardımıyla (2.15) denklemi de
1 2 1 2ln 2( )d a c uw vw kw hw
olarak düzenlenir. Dolayısıyla
1 2
1ln 2d a c w (2.24)
elde edilir.
3. MİNKOWSKİ UZAYINDA TİMELİKE
BONNET YÜZEYLER
i3
1, , Minkowski uzayında asli doğrultulara sahip olan
bir diğer timelike yüzey M olsun öyle ki M , M nin
asli eğriliklerini koruyan bir izometrik deformasyonu
olduğunu kabul edelim. M üzerinde ortonormal asli
çatı alanı 1 2 3, , e e e ve 1 2, e e çatı alanına karşılık
gelen dual asli çatı 1 2,w w olmak üzere M nin
birinci temel formu
2 2 2 2
1 2 1 2w ww w (3.1)
dır. 1e ve
2e boyunca asli eğrilikler, sırasıyla
,a a c c (3.2)
olup 0b dır. (3.1) denklemi ile verilen birinci temel
formdan görülür ki M üzerinde
1 1 2
2 1 2
cosh sinh ,
sinh cosh
w w w
w w w
(3.3)
olacak şekilde bir dönüşümü vardır. (3.3)
denkleminin dış türevi alındığında
1 2 2
1( )dw w d w
ve
2 1 2
1( )dw w d w
elde edilir. Birinci tür Cartan yapı denklemleri
yardımıyla
2 1 2
1 2 1w w w d (3.4)
elde edilir. (2.24) denkleminden
1 2
1ln 2d a c w
yazılabilir. (3.2) denkleminden a a ve c c
olduğundan (2.24) ve son denklem yardımıyla 1 2 1 2
1 12 2w w elde edilmiş olur. Bu son
eşitliğe operatörü uygulandığında
1 2 1 2
1 12 2w w
elde edilir. Burada 1 2 2 1 2*, 1, ,
olduğundan 2 2 2 2
1 12 2w w bulunur. Gerekli
düzenlemeler yapılırsa 2 2 2 2
1 1 2 w w yani
2 2 2 2
1 1
1
2w w eşitliği elde edilir. Buradan
(3.4) göz önüne alınırsa
2 21
2d (3.5)
bulunur. (2.23) denklemine benzer şekilde M için 12 ( )cdH verilebilir. (3.2) de göz önüne
alınarak bu son eşitlik ile (2.23) karşılaştırılırsa 1 1

Sabit Olmayan Ortalama Eğrilikli Timelike Bonnet Yüzeyler S. Ersoy, K. Eren
SAU J. Sci. Vol 17, No 1, p. 113-118, 2013 117
bulunur. Böylece 1 2 1 2u w ww uwv v yazılabilir.
(3.3) denklemi dikkate alınarak
cosh sinh ,
sinh cosh
u u v
v u v
(3.6)
bulunur. (2.20) eşitliği dikkate alınarak 2 1 2v w u w denkleminde (3.3) ve (3.6)
denklemleri yerine yazılırsa
2 1 2sinh 2 cosh 2 (3.7)
elde edilir. cothT olsun. T nin diferansiyeli
alınırsa
1 2dT T (3.8)
bulunur. Bu toplam diferansiyel denklem izometrik
deformasyonlar sonucu asli doğrultuların açısı kadar
hiperbolik dönmesiyle sağlanır. Deformasyonun aşikâr
olmaması için gerek ve yeter şart (3.8) denkleminin tam
olarak integrallenebilir olmasıdır [11].
[11] de W. Chen ve H. Li tarafından timelike yüzeyin
ortalama eğriliğini sabit kabul edilerek böyle bir
yüzeyin timelike Bonnet yüzey olması ile ilgili
aşağıdaki teoremi vermiştir.
Teorem 3.1. i3
1, de
2H K olmak üzere sabit
ortalama eğrilikli tüm timelike yüzeyler bir parametreli
aşikâr olmayan izometrik deformasyon ailesi altında
ortalama eğriliği koruyorsa bu yüzeyler timelike Bonnet
yüzey olur [11].
Şimdi H nin sabit olma ve olmama durumlarını ayrı
ayrı incelemek üzere
1 1 2
2 1 2
,d P
d Q
(3.9)
olacak şekilde P ve Q tanımlayalım. (3.8)
denkleminin dış türevinde (3.9) eşitlikleri yazılırsa
1 21 0TP Q
(3.10)
bulunur. Böylece yüzeyler
1 :C H sabit olma durumu,
2 :C H sabit, 0P ve 1Q olma durumu,
3 :C H sabit, 0P ve 1Q olma durumu,
olacak şekilde sınıflandırmalar yapılarak üç farklı
kategoride incelenebilir. Bu durumla ayrı ayrı
incelenirse 1 ,C 2C
ve 3C
de durum aşağıdaki gibi olur.
1C
de ortalama eğrilik sabit olduğundan (2.13)
denkleminden 0u v olduğu açıktır.
Dolayısıyla (2.20) dan 1 2 0 dır. Sonuç olarak
(3.8) denkleminden T nin sabit olduğu görülür. H nin
sabit olması durumunda Bonnet’in 3E de verdiği
Bonnet teoreminin benzeri timelike Bonnet yüzeyler
için [11] de incelenmiştir.
2C de ortalama eğriliğin sabitten farklı olup eğer,
0P ve 1Q ise (3.10) denklemi her T için
sağlanır.
3C de ise ortalama eğrilik sabitten farklı iken 0P ve
1Q ise (3.10) denkleminde
1 QT
P
(3.11)
elde edilir. Böylece (3.8) denkleminin bir tek çözümü
vardır.
Şimdi sabit olmayan ortalama eğrilikli ve gradH null
olmayan timelike yüzeyleri incelemek üzere 3C
durumunu göz önüne alalım. (3.11) denklemindeki T ,
umbilik nokta olmayan yani 2H K olan herhangi
timelike yüzey için tam anlamıyla hesaplanabilir. Ancak
ortalama eğriliği koruyan Φ non-trivial izometriyi elde
etmek için T nin (3.8) denklemini sağlaması gerekir.
Şöyle ki (3.11) denklemi (3.8) de yerine yazılırsa
1 21 1Q Q
dP P
(3.12)
elde edilir. Bu denklem 3C deki timelike Bonnet
yüzeyler için bir kriter oluşturur.

S. Ersoy, K. Eren Sabit Olmayan Ortalama Eğrilikli Timelike Bonnet Yüzeyler
118 SAU J. Sci. Vol 17, No 1, p. 113-118, 2013
KAYNAKLAR
[1] BONNET, O., Mémoire sur la théorie des surfaces
applicables, J. École Polytech. 42 (1867), 72-92.
[2] CARTAN, E., Sur les couples de surfaces
applicables avec conservation des courbures principales,
Bull. Sc. Math. 66 (1942), 1-30; reprinted in: Oeuvres
Completes, Partie III, vol.2, 1591-1620.
[3] LAWSON, H. B., Complete minimal surface in S3,
Ann. of Math. (2), 92 (1970), 335-374.
[4] CHERN, S. S., Deformation of surfaces preserving
principal curvature, Differ. Geo. and Complex Anal., H.
E. Rauch Memorial volume, Springer-Verlag (1985)
155-163.
[5] ROUSSOS, I. M., The helicoidal surfaces as Bonnet
surfaces, Tohoku Math. J. (2) 40 (1988), no. 3, 485–
490.
[6] ROUSSOS, I. M., Tangent developable surfaces as
Bonnet surfaces, Acta Math. Sin. (Engl. Ser.) 15 (1999),
no. 2, 269–276.
[7] ROUSSOS, I. M., Global results on Bonnet surfaces,
J. Geom. 65 (1999), no. 1-2, 151–168.
[8] SOYUÇOK, Z., The problem of non-trivial
isometries of surfaces preserving principal curvatures, J.
Geom. 52 (1995), no. 1-2, 173–188.
[9] SOYUÇOK, Z., The problem of isometric
deformations of a Euclidean hypersurface preserving
mean curvature, Bull. Tech. Univ. 49 (1996), no. 3-4,
551–562.
[10] BAĞDATLI, H., SOYUÇOK, Z., On the problem
of isometry of a hypersurface preserving mean
curvature, Proc. Indian Acad. Sci. Math. Sci. 117
(2007), no. 1, 49–59.
[11] CHEN, W., LI, H., On the classification of the
timelike Bonnet surfaces, in: Geometry and Topology of
Submanifolds, 10, Chern, S. Chen, W., Shelton Street,
Covent Garden, London, (1999), 18-31.

SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 119-124, 2013 SAU J. Sci. Vol 17, No 1, p. 119-124, 2013
119
3.3 ghz mikroşerit anten tasarımı ve farklı besleme yöntemleri için analizi
Haydar KÜTÜK1, Ahmet Y. TEŞNELİ1, N. Berna TEŞNELİ2*
1 Sakarya Üniversitesi , Mühendislik Fakültesi, Elektrik ve Elektronik Mühendisliği Bölümü, Sakarya
2 İstanbul Büyükşehir Belediyesi, Bilgi İşlem Müdürlüğü, İstanbul
03.05.2012 Geliş/Received, 05.09.2012 Kabul/Accepted
ÖZET
Bu çalışmada yakın gelecekte yaygınlaşması beklenen WiMax ve benzeri yeni nesil kablosuz haberleşme
teknolojisinde kullanılabilecek 3.3 GHz frekanslı mikroşerit anten tasarlanmış ve beş temel besleme yöntemi için bu
antenin analizi yapılmıştır. Tasarımda antenin yama boyutları, dielektrik malzeme ve alt tabaka kalınlığı sabit
tutularak sadece besleme yöntemleri ve besleme hattı boyutları değiştirilmiştir. Böylece besleme yöntemlerinin
performansları karşılaştırılarak geniş bantlı mikroşerit anten tasarımı gerçekleştirilmiştir. Ansoft-HFSS programı
kullanılarak antenlerin simülasyonları yapılmış ve bant genişliği %60’lara ulaşan antenler tasarlanmıştır.
Anahtar Kelimeler: Mikroşerit anten, Dikdörtgensel yama, Geniş bant, Besleme yöntemleri
3.3 ghz microstrip antenna design and analysis for different feeding methods
ABSTRACT
This work presents design of microstrip patch antenna for operation at 3.3 GHz using five basic feeding techniques.
The antenna was intended for use next generation wireless application such as WiMax. When the proposed antenna
design, patch size, dielectric material and thickness of substrate were fixed, only feeding techniques and dimensions
of transmission line were changed. In this way, performance of feeding techniques was compared and was tried to
design of wideband microstrip antenna. Ansoft – HFSS was used for the simulation of antenna and up to %60
wideband microstrip antennas were designed.
Keywords: Microstrip antenna, Rectangular patch, Wideband, Feeding methods
* Sorumlu Yazar / Corresponding Author
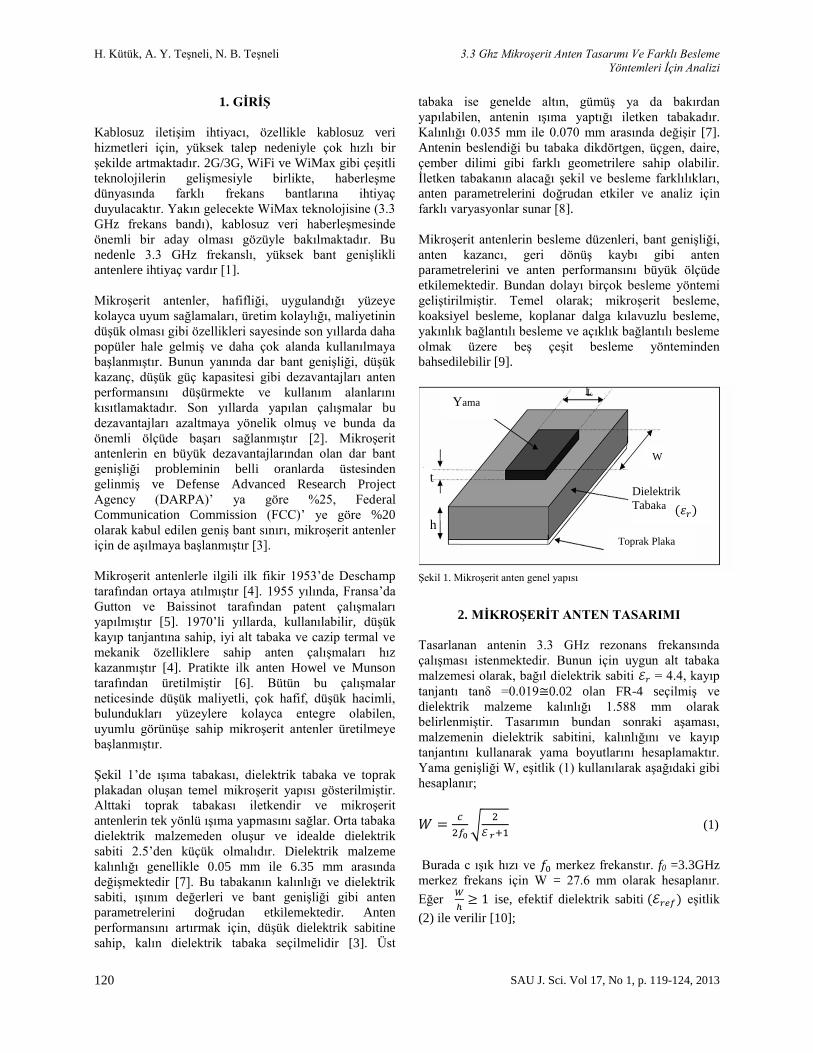
H. Kütük, A. Y. Teşneli, N. B. Teşneli 3.3 Ghz Mikroşerit Anten Tasarımı Ve Farklı Besleme
Yöntemleri İçin Analizi
120 SAU J. Sci. Vol 17, No 1, p. 119-124, 2013
1. GİRİŞ
Kablosuz iletişim ihtiyacı, özellikle kablosuz veri
hizmetleri için, yüksek talep nedeniyle çok hızlı bir
şekilde artmaktadır. 2G/3G, WiFi ve WiMax gibi çeşitli
teknolojilerin gelişmesiyle birlikte, haberleşme
dünyasında farklı frekans bantlarına ihtiyaç
duyulacaktır. Yakın gelecekte WiMax teknolojisine (3.3
GHz frekans bandı), kablosuz veri haberleşmesinde
önemli bir aday olması gözüyle bakılmaktadır. Bu
nedenle 3.3 GHz frekanslı, yüksek bant genişlikli
antenlere ihtiyaç vardır [1].
Mikroşerit antenler, hafifliği, uygulandığı yüzeye
kolayca uyum sağlamaları, üretim kolaylığı, maliyetinin
düşük olması gibi özellikleri sayesinde son yıllarda daha
popüler hale gelmiş ve daha çok alanda kullanılmaya
başlanmıştır. Bunun yanında dar bant genişliği, düşük
kazanç, düşük güç kapasitesi gibi dezavantajları anten
performansını düşürmekte ve kullanım alanlarını
kısıtlamaktadır. Son yıllarda yapılan çalışmalar bu
dezavantajları azaltmaya yönelik olmuş ve bunda da
önemli ölçüde başarı sağlanmıştır [2]. Mikroşerit
antenlerin en büyük dezavantajlarından olan dar bant
genişliği probleminin belli oranlarda üstesinden
gelinmiş ve Defense Advanced Research Project
Agency (DARPA)’ ya göre %25, Federal
Communication Commission (FCC)’ ye göre %20
olarak kabul edilen geniş bant sınırı, mikroşerit antenler
için de aşılmaya başlanmıştır [3].
Mikroşerit antenlerle ilgili ilk fikir 1953’de Deschamp
tarafından ortaya atılmıştır [4]. 1955 yılında, Fransa’da
Gutton ve Baissinot tarafından patent çalışmaları
yapılmıştır [5]. 1970’li yıllarda, kullanılabilir, düşük
kayıp tanjantına sahip, iyi alt tabaka ve cazip termal ve
mekanik özelliklere sahip anten çalışmaları hız
kazanmıştır [4]. Pratikte ilk anten Howel ve Munson
tarafından üretilmiştir [6]. Bütün bu çalışmalar
neticesinde düşük maliyetli, çok hafif, düşük hacimli,
bulundukları yüzeylere kolayca entegre olabilen,
uyumlu görünüşe sahip mikroşerit antenler üretilmeye
başlanmıştır.
Şekil 1’de ışıma tabakası, dielektrik tabaka ve toprak
plakadan oluşan temel mikroşerit yapısı gösterilmiştir.
Alttaki toprak tabakası iletkendir ve mikroşerit
antenlerin tek yönlü ışıma yapmasını sağlar. Orta tabaka
dielektrik malzemeden oluşur ve idealde dielektrik
sabiti 2.5’den küçük olmalıdır. Dielektrik malzeme
kalınlığı genellikle 0.05 mm ile 6.35 mm arasında
değişmektedir [7]. Bu tabakanın kalınlığı ve dielektrik
sabiti, ışınım değerleri ve bant genişliği gibi anten
parametrelerini doğrudan etkilemektedir. Anten
performansını artırmak için, düşük dielektrik sabitine
sahip, kalın dielektrik tabaka seçilmelidir [3]. Üst
tabaka ise genelde altın, gümüş ya da bakırdan
yapılabilen, antenin ışıma yaptığı iletken tabakadır.
Kalınlığı 0.035 mm ile 0.070 mm arasında değişir [7].
Antenin beslendiği bu tabaka dikdörtgen, üçgen, daire,
çember dilimi gibi farklı geometrilere sahip olabilir.
İletken tabakanın alacağı şekil ve besleme farklılıkları,
anten parametrelerini doğrudan etkiler ve analiz için
farklı varyasyonlar sunar [8].
Mikroşerit antenlerin besleme düzenleri, bant genişliği,
anten kazancı, geri dönüş kaybı gibi anten
parametrelerini ve anten performansını büyük ölçüde
etkilemektedir. Bundan dolayı birçok besleme yöntemi
geliştirilmiştir. Temel olarak; mikroşerit besleme,
koaksiyel besleme, koplanar dalga kılavuzlu besleme,
yakınlık bağlantılı besleme ve açıklık bağlantılı besleme
olmak üzere beş çeşit besleme yönteminden
bahsedilebilir [9].
Şekil 1. Mikroşerit anten genel yapısı
2. MİKROŞERİT ANTEN TASARIMI
Tasarlanan antenin 3.3 GHz rezonans frekansında
çalışması istenmektedir. Bunun için uygun alt tabaka
malzemesi olarak, bağıl dielektrik sabiti ℰ𝑟 = 4.4, kayıp
tanjantı tanδ =0.019≅0.02 olan FR-4 seçilmiş ve
dielektrik malzeme kalınlığı 1.588 mm olarak
belirlenmiştir. Tasarımın bundan sonraki aşaması,
malzemenin dielektrik sabitini, kalınlığını ve kayıp
tanjantını kullanarak yama boyutlarını hesaplamaktır.
Yama genişliği W, eşitlik (1) kullanılarak aşağıdaki gibi
hesaplanır;
𝑊 =𝑐
2𝑓0√
2
ℰ 𝑟+1 (1)
Burada c ışık hızı ve 𝑓0 merkez frekanstır. f0 =3.3GHz
merkez frekans için W = 27.6 mm olarak hesaplanır.
Eğer 𝑊
ℎ≥ 1 ise, efektif dielektrik sabiti (ℰ𝑟𝑒𝑓) eşitlik
(2) ile verilir [10];
Dielektrik
Tabaka (𝜀𝑟)
Toprak Plaka
W
L Yama
h
t
3.3 Ghz Mikroşerit Anten Tasarımı Ve Farklı Besleme
Yöntemleri İçin Analizi
H. Kütük, A. Y. Teşneli, N. B. Teşneli
SAU J. Sci. Vol 17, No 1, p. 119-124, 2013 121
ℰ𝑟𝑒𝑓 = ℰ𝑟+1
2+
ℰ𝑟−1
2[
1
√1+12ℎ
𝑊
] (2)
ℰ𝑟 = 4.4, h=1.588 mm ve W = 27.6 mm değerleri için
ℰ𝑟𝑒𝑓 = 4.008 olarak elde edilir.
𝐿𝑒𝑓𝑓 = c
2fo√ℰref (3)
Eşitlik (3) ile verilen efektif uzunluk (Leff ) c =3x108
m/s, ℰ𝑟𝑒𝑓 = 4.008 ve 𝑓𝑜 =3.3 GHz değerleri kullanılarak,
22.7 mm bulunur. Saçak değeri ΔL ve yama boyu L ise
eşitlik (4) ve (5) yardımıyla sırasıyla 0.72 mm ve 21.3
mm şeklinde elde edilir.
L = 0.412ℎ(ℰ𝑟𝑒𝑓+0,3)(
𝑊
ℎ+0,264)
(ℰ𝑟𝑒𝑓−0,258)(𝑊
ℎ+0,8)
(4)
L = Leff -2ΔL (5)
Sonuç olarak yama boyutları W =27.6 mm ve L = 21.3
mm olarak belirlenir.
3. BESLEME YÖNTEMLERİ VE ANALİZLERİ
Bu çalışmada tasarlanan anten mikroşerit, koplanar
dalga kılavuzlu, koaksiyel, açıklık bağlantılı ve yakınlık
bağlantılı besleme olmak üzere beş farklı yöntem ile
beslenerek analizler yapılmıştır. Mikroşerit antenler için
dielektrik sabiti (ℰ𝑟=4.4), alt tabaka kalınlığı (h=1.588
mm) ve yama boyutları (W=27.6 mm, L= 21.3 mm) gibi
parametreler sabit tutulup sadece besleme çeşidi ve
beslemeyle ilgili parametreler değiştirilerek elde edilen
sonuçlar değerlendirilmiştir. Antenin besleme
düzenlerine ait besleme hattı boyutları, açıklık boyutları,
ikinci alt tabaka kalınlığı ve ikinci tabakaya ait
dielektrik sabiti gibi parametreler belirlenirken
simülasyon programında denemeler yapılarak elde
edilen en uygun değerler kullanılmıştır.
3.1. Mikroşerit Besleme
İlk uygulanan yöntem mikroşerit beslemedir. HFSS
programı kullanılarak tasarlanan anten şekil 2’de
gösterilmiştir. Anten için iletim hattı uzunluğu 17 mm
ve eni 1 mm olarak belirlenmiştir. S11 parametresi
grafiği şekil 3’deki gibi elde edilir. Şekilde açıkça
görüldüğü gibi, anten 3.3 GHz frekansında rezonansa
girmekte olup 2.7-3.74 GHz frekans aralığında
çalışmaktadır. %25.5 bant genişliği ile mikroşerit
besleme için iyi bir sonuç elde edilmiştir. Antenin geri
dönüş kaybı -22.94 dB ve kazancı -4.6 dB olarak
ölçülmüştür.
Şekil 3 Tasarlanan yama antenin S11 parametresi grafiği
3.1.1. Yamanın Beslendiği Noktadan Yarıklar Açma
Mikroşerit antenin bant genişliğini artırmak için Şekil
4’te görüldüğü gibi yama ile besleme hattının birleştiği
noktadan simetrik olarak yama üzerinde yarıklar
açılmıştır. Yarık eni 0.1 mm, yarık boyu 0.5 mm
hassasiyetle değiştirilerek anten parametrelerindeki
değişim gözlenmiştir. Yarık boyutları 0.5 mm x 8 mm
olduğunda, bant genişliğinde artış görülmüş ve bant
genişliğinin %28 seviyesine çıktığı gözlenmiştir.
Rezonans frekansında ise bir değişiklik olmamış ve
anten 3.3 GHz frekansında rezonansa girmiştir. Antende
yarık olmadığı duruma göre daha iyi bir geri dönüş
kaybı elde edilmiş ve değerin -24.27 dB seviyesine
düştüğü görülmüştür.
Şekil 4. Besleme noktasından yarık açılmış yama anten
2.00 2.50 3.00 3.50 4.00 4.50 5.00Freq [GHz]
-25.00
-20.00
-15.00
-10.00
-5.00
0.00
dB
(S(W
av
eP
ort
1,W
av
eP
ort
1))
Ansoft Corporation HFSSDesign1XY Plot 1
m1 m2
m3
Curve Info
dB(S(WavePort1,WavePort1))
Setup1 : Sw eep1
Name X Y
m1 2.9200 -10.1760
m2 3.7600 -9.9803
m3 3.3000 -23.8084
Şekil 2. Tasarlanan antenin HFSS görüntüsü

H. Kütük, A. Y. Teşneli, N. B. Teşneli 3.3 Ghz Mikroşerit Anten Tasarımı Ve Farklı Besleme
Yöntemleri İçin Analizi
122 SAU J. Sci. Vol 17, No 1, p. 119-124, 2013
3.2. Koplanar Dalga Kılavuzlu Besleme
Tasarlanan anten için ikinci olarak koplanar dalga
kılavuzlu besleme yöntemi incelenmiştir. Koplanar
dalga kılavuzu için taban düzlemi kare olarak seçilmiş
ve kenar uzunluğu 72 mm olarak belirlenmiştir. Kare
düzlem içindeki boşluğun boyutu ise 44 mm olarak
belirlenmiştir. Tasarlanan antenin geometrisi şekil 5’de
verilmektedir. İletim hattı ile koplanar dalga kılavuzu
arasındaki boşluk 0.25 mm olarak seçilmiştir. Antenin
S11 parametre grafiği şekil 6’daki gibidir. Anten tasarlandığı gibi 3.3 GHz’ de rezonansa girmekte ve
2.4-3.9 GHz frekans aralığında çalışmaktadır. Buna
göre bant genişliği %45.6 olarak ölçülmüştür. Bu da
yama antenler için çok iyi bir sonuçtur. Tasarlanan
anten için sadece besleme yapısı değiştirildiğinde, bant
genişliğinin önemli ölçüde değiştiği ve neredeyse iki
katına çıktığı görülmektedir. Bu sonuca göre koplanar
beslemenin mikroşerit beslemeye göre daha iyi olduğu
yorumu yapılabilir. Antenin geri dönüş kaybı -18.93 dB,
antenin kazancı ise 4.9 dB olarak ölçülmüştür.
Şekil 5. Koplanar dalga kılavuzlu beslenmiş mikroşerit anten
Şekil 6. Tasarlanan antenin S11 parametresi grafiği
3.2.2. İletim Hattı ile Düzlem Arasındaki Boşluğu
Değiştirme
Bu bölümde tasarladığımız antenin iletim hattı ile
koplanar dalga kılavuzu arasındaki boşluk değiştirilerek,
anten parametrelerindeki değişim gözlenmiştir. Boşluk
0.1 mm hassasiyetle arttırılarak yapılan simülasyon
sonuçları tablo 1’de sunulmaktadır. Boşluktaki küçük
değişiklikler anten parametrelerinde önemli değişimlere
sebep olmaktadır. Bu sonuç anten üretim sürecinde
hassas davranılması ve antenin sıcaklık değerlerinin
sabit tutulması gerektiğini göstermektedir. Bunun
dışında söz konusu boşluk toleransı kullanılarak, anten
rezonans frekansında değişiklikler yapılabilir ve anten
istenilen çalışma frekansına ayarlanabilir. Yapılan
simülasyon sonuçlarına göre Tablo 1’de görülen en
önemli değer %60’lık bant genişliği değeridir. Antende
boşluk ayarı yapılarak, bant genişliğinin önemli ölçüde
değiştirilebileceği görülmektedir.
Tablo 1. Boşluk boyutu değişen antenin parametre değişim tablosu
Boşluk 𝑓1 𝑓2 𝑓0
Bant
Genişliği
Kazanç
Geri
Dönüş Kaybı
0.25 2.40 3.90 3.29 45.6 4.90 -18.93
0.1 3.14 3.92 3.56 21.9 4.83 -29.62
0.2 2,50 3,94 3,46 41.6 4.86 -21,66
0.3 2.36 3.84 3.16 46.8 4.88 -20.09
0.4 2.28 3.96 2.80 60 4.92 -17.73
0.5 2.30 3.48 3.02 39.1 4.96 -53.14
0.6 2.22 3.52 2.88 45.1 5.01 -33.21
0.7 2.32 3.30 3.02 32.5 4.92 -18.03
0.8 2.26 3.28 2.98 34.2 4.92 -17.32
0.9 2.34 3.22 3.00 29.3 4.99 -14.33
1 2.18 3.18 2.48 40.3 5.02 -17.96
3.3. Koaksiyel Besleme
Koaksiyel besleme yöntemi kullanıldığında anteni
besleyen sondanın çapı 2.4 mm, uzunluğu 26.5 mm,
sondayı saran koaksiyel kablonun çapı 3 mm, boyu ise
26.5 mm olarak seçilmiştir.
Şekil 7. Koaksiyel beslemeli 3.3 GHz mikroşerit anten geometrisi
Antenin geometrisinin verildiği Şekil 7’de görüldüğü
gibi, toprak plaka ile alt taban arası 10 mm boyunca
hava ile doldurulmuştur. Şekil 8’de antenin S11
parametresi grafiği verilmiştir. Buradan da görüldüğü
gibi anten 3.3 GHz merkez frekansta ve 3.04-3.64 GHz
arasında çalışmaktadır. Bant genişliği %18.2 olarak
bulunmuştur. Ancak besleme noktaları değiştirilerek
bant genişliği izlenmiş ve bu yolla bant genişliğinin
2.00 2.50 3.00 3.50 4.00 4.50 5.00Freq [GHz]
-20.00
-18.00
-16.00
-14.00
-12.00
-10.00
-8.00
-6.00
-4.00
-2.00
dB
(S(W
av
eP
ort
1,W
av
eP
ort
1))
Ansoft Corporation HFSSDesign1XY Plot 1
m1 m2
m3
Curve Info
dB(S(WavePort1,WavePort1))
Setup1 : Sw eep1Name X Y
m1 2.4200 -10.0211
m2 3.9000 -9.8384
m3 3.2800 -19.5493

3.3 Ghz Mikroşerit Anten Tasarımı Ve Farklı Besleme
Yöntemleri İçin Analizi
H. Kütük, A. Y. Teşneli, N. B. Teşneli
SAU J. Sci. Vol 17, No 1, p. 119-124, 2013 123
artması sağlanmıştır. Besleme noktası değiştirilerek elde
edilebilen en iyi bant genişliği değeri %25.7 olarak
belirlenmiştir. Geri dönüş kaybı -15.22 dB, kazancı ise
7.7 dB olarak ölçülmüştür. Mikroşerit anten için
optimum besleme noktası belirlenerek ulaşılan
%25.7’lik bant genişliğinin iyi bir sonuç olduğu
görülmektedir. Bunun yanında mikroşerit antenlerin
genel bir eksikliği olan düşük kazanç problemi burada
da mevcuttur.
Şekil 8. Tasarlanan antenin S11 parametresi grafiği
3.4. Açıklık Bağlantılı Besleme
Tasarlanan anten için sonuçları incelenen dördüncü
besleme yöntemi açıklık bağlantılı beslemedir. Bu
yöntemde ihtiyaç duyulan ikinci taban için de FR-4
malzemesi kullanılmış ve malzeme kalınlığı 17.42 mm
olarak seçilmiştir. Kullanılan besleme yöntemi besleme
hattının boyutlarının değiştirilmesini gerektirdiğinden
Şekil 9. Açıklık Bağlantılı Mikroşerit Anten Geometrisi
besleme hattı boyutları 50 mm ve 3.2 mm olarak
yeniden düzenlenmiştir. Toprak plaka üzerinde açılan
açıklığın boyutları ise 40-6 mm olarak belirlenmiştir.
HFSS ile tasarlanan antenin geometrisi Şekil 9’da,
antenin S11 parametresi grafiği ise Şekil 10’da
verilmektedir. Anten 3.16 GHz ile 3.40 GHz bandında
çalışmakta ve merkez frekansı 3.30 GHz’tedir. Burada
kullanılan besleme yöntemi ile istenilen merkez
frekansına sahip anten tasarlanmış, fakat bant genişliği
%8 civarında elde edilmiştir. Bu değer daha önce
uygulanan besleme yöntemlerinde ulaşılan bant
genişliklerine göre oldukça düşüktür. Burada da
koaksiyel besleme yönteminde yapıldığı gibi besleme
noktaları değiştirilerek bant genişliği artırılmaya
çalışılmış ve elde edilen %13’lük en iyi bant genişliği
değeri için geri dönüş kaybı -21.27 dB ve anten kazancı
2.26 dB olmuştur.
Şekil 10. Tasarlanan antenin S11 parametresi grafiği (Açıklık
Bağlantılı Besleme)
3.5. Yakınlık Bağlantılı Besleme
Tasarlanan anten için son olarak yakınlık bağlantılı
besleme yöntemi incelenmiştir. İletim hattı boyutları
için 1 mm ve 13.385 mm değerleri seçilmiş ve ikinci alt
tabaka için yine kalınlığı 1.588 mm ve dielektrik sabiti
4.4 olan FR-4 malzemesi kullanılmıştır. Yama, besleme
hattının 5 mm noktasından itibaren konumlandırılmıştır.
Şekil 12’deki S11 parametresi grafiğinde görüldüğü gibi
anten 2.68 GHz ve 3.32 GHz olmak üzere iki merkez
frekansta çalışmaktadır ve bant genişliği % 28.3’tür.
Bant genişliği besleme noktaları değiştirilerek % 37.5’e
kadar çıkartılmıştır. Burada elde edilen bant genişliği
değeri, uluslararası kriterlere göre oldukça iyidir. Geri
dönüş kaybı -27 dB civarı olup anten kazancı ise -3.5
dB civarındadır.
Şekil 11. Yakınlık bağlantılı mikroşerit anten geometrisi
2.00 2.50 3.00 3.50 4.00 4.50Freq [GHz]
-16.00
-14.00
-12.00
-10.00
-8.00
-6.00
-4.00
-2.00
0.00
dB
(S(W
aveP
ort
1,W
aveP
ort
1))
Ansoft Corporation HFSSDesign1XY Plot 1
m3m4
m5
Curve Info
dB(S(WavePort1,WavePort1))
Setup1 : Sw eep1Name X Y
m3 3.0400 -10.1548
m4 3.6400 -9.8788
m5 3.3000 -15.2202
1.50 2.00 2.50 3.00 3.50 4.00Freq [GHz]
-25.00
-20.00
-15.00
-10.00
-5.00
0.00
dB
(St(
Feed
_T
1,F
eed
_T
1))
Ansoft Corporation HFSSDesign1XY Plot 1
m2
m3
m1
Curve Info
dB(St(Feed_T1,Feed_T1))
Setup1 : Sw eep1
Name X Y
m1 3.1500 -9.9746
m2 3.4000 -10.0003
m3 3.3000 -21.2719

H. Kütük, A. Y. Teşneli, N. B. Teşneli 3.3 Ghz Mikroşerit Anten Tasarımı Ve Farklı Besleme
Yöntemleri İçin Analizi
124 SAU J. Sci. Vol 17, No 1, p. 119-124, 2013
Şekil 12. Antenin S11 parametresi grafiği (yakınlık bağlantılı)
4. SONUÇ VE DEĞERLENDİRME
Mikroşerit antenler için dielektrik sabiti, alt tabaka
boyutları ve yama boyutları gibi parametreler sabit
tutulup sadece besleme çeşidi ve beslemeyle ilgili
parametreler değiştirilerek elde edilen sonuçlar
değerlendirilmiştir. Şekil 13’de besleme yöntemleri için
bant genişliği karşılaştırma grafiği verilmiştir. En
yüksek bant genişliği %60 ile koplanar dalga kılavuzlu
(CPW) beslemeye aittir. Yakınlık bağlantılı besleme
için elde edilen %37.52 ’lik band genişliği oranı da
DARPA’ın ve FCC’nin geniş bant kabul ettiği
uluslararası standartlarla kıyaslandığında oldukça iyi bir
sonuçtur.
Şekil 13. Besleme çeşitleri bant genişliği karşılaştırması
Bu çalışmada analizi yapılan 5 farklı besleme
yönteminden dördünde uluslar arası kriterlere göre geniş
band kabul edilen değerlere ulaşılmıştır. Bu kriterler
altında kalan tek değer açıklık bağlantılı besleme
yöntemi ile ulaşılan %13’lük band genişliği değeridir.
Ancak bu değer de geniş bant olmamasına karşın
mikroşerit antenler için kabul edilebilir bir bant
genişliği değeridir.
Bant genişliğinde olduğu gibi, kazanç değerlerinde de
en iyi sonuca 4.92 dB değeri ile koplanar dalga
kılavuzlu besleme yönteminde ulaşılmıştır. İkinci olarak
ulaşılan en iyi sonuç ise açıklık bağlantılı besleme
yöntemi ile elde edilen 1.24 dB kazanç değeridir. Giriş
bölümünde belirtildiği gibi mikroşerit antenler -6 dB
gibi düşük bir kazanca sahiptirler. Koaksiyel besleme
yöntemi dışında kullanılan tüm besleme yöntemleri için
tasarlanan antenler, -6 dB’nin üzerinde kazançlara
sahiptir. Geri dönüş kaybı için ise tüm besleme
yöntemleri ile elde edilen değerler oldukça düşük kabul
edilebilir. En iyi değer yine koplanar dalga kılavuzlu
besleme ile elde edilmiştir.
Sonuç olarak, en iyi performansı koplanar dalga
kılavuzlu besleme göstermiştir. Yeni nesil haberleşme
için bu besleme yöntemi önerilebilir. Mikroşerit
antenlerin dar bant genişliği problemi, büyük oranda
aşılmış ve gelecekte daha geniş bantlı antenler
üretilebileceği görülmüştür. Ayrıca anten boyutlarındaki
küçük değişimlerin, anten performansında önemli
değişikliklere neden olduğu gözlenmiştir. Bu nedenle
mikroşerit antenler için üretim toleransının çok hassas
olması gerektiği görülmüştür. Ayrıca antenin, çalışma
ortamındaki sıcaklık ve basınç gibi dış etkenlerden
etkilenmemesine dikkat edilmelidir.
TEŞEKKÜR
Bu çalışma SAÜ Bilimsel Araştırma Projeleri
Komisyonu tarafından desteklenmiştir. (Proje no: 2012-
50-01-029)
KAYNAKLAR
[1] KURNIAWAN, A., MUKTI, P.H., A 2.3/3.3 dual
band microstrip antenna design for WiMax
Applications, ITB J. ICT, Vol. 4, No. 2, 67-78, 2011.
[2] GARG, R., PRAKASH, B., INDER B., APİSAK, I.,
Microstrip Antenna Design Handbook, Artech House;
pages: 1-2, 11.2000.
[3] SAFRAN, M.I., K, AYDIN, E., Pek Geniş Bant
Anten Tasarımı ve İmalatı, Atılım Üniversitesi, Ankara.
[4] BAZAN, G. A. S., Design of a Circularly Polarized
Patch Antenna for Satellite Mobile Communications in
l-Band, Polytechnic University of Cataluña, December
2010.
[5] H. GUTTON AND G. BAISSINOT, Flat Aerial for
Ultra High Frequencies, French Patent No. 703113,
1995.
[6] YILDIRIM, A., YAĞCI, H. B., PAKER S., 2.4 GHz
High Power Microstrip Patch Antenna Design and
Realization, Telenetronics n.p.sh, Mbreti Zog 61,
Prizren, Kosova, 2000.
[7] BALANIS C.A., Antenna Theory Analysis and
Design, John Wiley and Sons , Arizona State University
,pages: 4-6, 1982.
[8] SAINATI, R. A., CAD of Microstrip Antenna for
Wireless Application, Artech House, London, 1996.
[9] REDDY, C.V.V., RANA, R., Design of Linearly
Polarized Rectangular Microstrip Patch Antenna Using
IE3D/PSO, National Institute of Technology, Rourkela,
2009.
[10] SCHNEIDER, M., Microstrip Lines for Microwave
Integrated Circuits, Bell. Syst. Tech. J., 48.,1968.
1.00 1.50 2.00 2.50 3.00 3.50 4.00 4.50Freq [GHz]
-30.00
-25.00
-20.00
-15.00
-10.00
-5.00
0.00dB
(S(W
aveP
ort1
,Wav
ePor
t1))
Ansoft Corporation HFSSDesign1XY Plot 1
m2
m3m4
m5
m1
Curve Info
dB(S(WavePort1,WavePort1))
Setup1 : Sw eep1
Name X Y
m1 2.8800 -10.3466
m2 3.3200 -27.7507
m3 3.9000 -9.7947
m4 2.0600 -9.9712
m5 2.6400 -17.4599
27,8
60
25,713
37,5
0
20
40
60
80
Mikroşerit CPW Koaksiyel Açıklık Yakınlık
Ban
t G
eniş
liği
(%
)
Besleme Yöntemleri

SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 125-129, 2013 SAU J. Sci. Vol 17, No 1, p. 125-129, 2013
125
Bazı pell denklemlerinin temel çözümleri
Merve GÜNEY1*, Refik KESKİN1
1Sakarya Üniversitesi, Fen Edebiyat Fakültesi, Matematik Bölümü, Sakarya
03.05.2012 Geliş/Received, 20.07.2012 Kabul/Accepted
ÖZET
𝑎, 𝑏 pozitif tamsayılar olsun. Makalede, 𝑑 = 𝑎2𝑏2 + 2𝑏, 𝑎2𝑏2 + 𝑏, 𝑎2 ± 2, 𝑎2 ± 𝑎 olmak üzere √d′ nin sürekli kesir
açılımı bulundu. 𝑑 = 𝑎2𝑏2 + 2𝑏, 𝑎2𝑏2 + 𝑏, 𝑎2 ± 2, 𝑎2 ± 𝑎 olmak üzere √d′ nin sürekli kesir yaklaşımları kullanılarak
𝑥² − 𝑑𝑦² = ±1 denklemlerinin fundamental çözümleri elde edildi.
Anahtar Kelimeler: Diofant Denklemleri, Pell Denklemleri, Sürekli Kesirler.
Fundamental solutions to some pell equations
ABSTRACT
Let 𝒂, 𝒃 be positive integers. In this paper, we find continued fraction expansion of √𝐝 when 𝒅 = 𝒂𝟐𝒃𝟐 + 𝟐𝒃, 𝒂𝟐𝒃𝟐 +
𝒃, 𝒂𝟐 ± 𝟐, 𝒂𝟐 ± 𝒂. We will use continued fraction expansion of √𝐝 in order to get the fundamental solutions of the
equations 𝒙² − 𝒅𝒚² = ±𝟏 when 𝒅 = 𝒂𝟐𝒃𝟐 + 𝟐𝒃, 𝒂𝟐𝒃𝟐 + 𝒃, 𝒂𝟐 ± 𝟐, 𝒂𝟐 ± 𝒂.
Keywords: Diophantine Equations, Pell Equations, Continued Fractions.
1. INTRODUCTİON
Let 𝑑 be a positive integer which is not a perfect square
and 𝑁 be any nonzero fixed integer. Then the equation
𝑥² − 𝑑𝑦² = 𝑁 is known as Pell equation. For 𝑁 = ±1,
the equations 𝑥² − 𝑑𝑦² = 1 and 𝑥² − 𝑑𝑦² = −1 are
known as classical Pell equations. If 𝑎² − 𝑑𝑏² = 𝑁, we
say that (𝑎, 𝑏) is a solution to the Pell equation 𝑥² −
𝑑𝑦² = 𝑁. We use the notations (𝑎, 𝑏) and 𝑎 + 𝑏√𝑑
interchangeably to denote solutions of the equation 𝑥² −
𝑑𝑦² = 𝑁. Also, if 𝑎 and 𝑏 are both positive, then 𝑎 + 𝑏√d
is a positive solution to the equation 𝑥² − 𝑑𝑦² = 𝑁.
The Pell equation 𝑥² − 𝑑𝑦² = 1 has always positive
integer solutions. When 𝑁 ≠ 1, the Pell equation 𝑥² −
* Sorumlu Yazar / Corresponding Author
𝑑𝑦² = 𝑁 may not have any positive integer solutions. It
can be seen that the equations 𝑥² − 3𝑦² = −1 and 𝑥² −7𝑦² = −4 have no positive integer solutions. Whether or
not there exists a positive integer solution to the equation
𝑥² − 𝑑𝑦² = −1 depends on the period length of the
continued fraction expansion of √d (See section 2 for
more detailed information).
In the next section, we give some well known theorems
and then we give main theorems in the third section.
2. PRELIMINARIES
If we know fundamental solution to the equations 𝑥² −𝑑𝑦² = ±1, then we can give all positive integer solutions
to these equations. Our theorems are as follows. For more

M. Güney, R. Keskin Fundamental Solutions To Some Pell Equations
126 SAU J. Sci. Vol 17, No 1, p. 125-129, 2013
information about Pell equation, one can consult [1], [2]
and [3].
Let 𝑥1 + 𝑦1√𝑑 be a positive solution to the equation
𝑥² − 𝑑𝑦² = 𝑁. We say that 𝑥1 + 𝑦1√𝑑 is the
fundamental solution to the equation 𝑥² − 𝑑𝑦² = 𝑁, if
𝑥2 + 𝑦2√𝑑 is a different solution to the equation 𝑥² −
𝑑𝑦² = 𝑁, then 𝑥1 + 𝑦1√𝑑 < 𝑥2 + 𝑦2√𝑑.
Recall that if 𝑎 + 𝑏√d and 𝑟 + 𝑠√d are two solutions to
the equation 𝑥² − 𝑑𝑦² = 𝑁, then 𝑎 = 𝑟 if and only if 𝑏 =
𝑠, and 𝑎 + 𝑏√d < 𝑟 + 𝑠√d if and only if 𝑎 < 𝑟 and 𝑏 <𝑠.
Theorem 2.1: Let 𝑑 be a positive integer that is not a
perfect square. Then there is a continued fraction
expansion of √d such that
√𝑑 = [𝑎0, 𝑎1, 𝑎2, . . 𝑎𝑛−1, 2𝑎0 ]
where 𝑙 is the period length and for 0 ≤ 𝑛 ≤ 𝑛 − 1, 𝑎𝑗 is
given by the recussion formulas;
α0 = √d, 𝑎𝑘 = ⟦𝛼𝑘⟧ and 𝛼𝑘+1 =1
𝛼𝑘−𝑎𝑘 ,
𝑘 = 0,1,2,3, …
Recall that 𝑎𝑙 = 2𝑎0 and 𝑎𝑙+𝑘 = 𝑎𝑘 for 𝑘 ≥ 1. The 𝑛𝑡ℎ
convergence of √𝑑 for 𝑛 ≥ 0 is given by 𝑝𝑛
𝑞𝑛= [𝑎0, 𝑎1, … , 𝑎𝑛] = 𝑎0 +
1
𝑎1+1
1+⋱
𝑎𝑛
.
By means of the 𝑘𝑡ℎ convergence of √d, we can give the
fundamental solution to the equations 𝑥² − 𝑑𝑦² = 1 and
𝑥² − 𝑑𝑦² = −1.
Now we give the fundamental solution to the equations
𝑥² − 𝑑𝑦² = ±1 by means of the period length of the
continued fraction expansion of √𝑑.
Lemma 2.2 Let 𝑙 be the period length of continued
fraction expansion of √d. If 𝑙 is even, then the
fundamental solution to the equation 𝑥² − 𝑑𝑦² = 1 is
given by
𝑥1 + 𝑦1√𝑑 = 𝑝𝑙−1 + 𝑞𝑙−1√d
and the equation 𝑥² − 𝑑𝑦² = −1 has no positive integer
solutions. If 𝑙 is odd, then the fundamental solution to the
equation 𝑥² − 𝑑𝑦² = 1 is given by
𝑥1 + 𝑦1√𝑑 = 𝑝2𝑙−1 + 𝑞2𝑙−1√𝑑
and the fundamental solution to the equation 𝑥² − 𝑑𝑦² =−1 is given by
𝑥1 + 𝑦1√𝑑 = 𝑝𝑙−1 + 𝑞𝑙−1√𝑑.
Theorem 2.3: Let 𝑥1 + 𝑦1√𝑑 be the fundamental
solution to the equation 𝑥² − 𝑑𝑦² = 1. Then all positive
integer solutions of the equation 𝑥² − 𝑑𝑦² = 1 are given
by
𝑥𝑛 + 𝑦𝑛√𝑑 = (𝑥1 + 𝑦1√𝑑)𝑛
with 𝑛 ≥ 1.
Theorem 2.4: Let 𝑥1 + 𝑦1√𝑑 be the fundamental
solution to the equation 𝑥² − 𝑑𝑦² = −1. Then all
positive integer solutions of the equation 𝑥² − 𝑑𝑦² = −1
are given by
𝑥𝑛 + 𝑦𝑛√𝑑 = (𝑥1 + 𝑦1√𝑑)2𝑛−1
with 𝑛 ≥ 1.
3. MAIN THEOREMS
From now on, we will assume that 𝑎 and 𝑏 are positive
integers. We give continued fraction expansion of √𝑑 for
𝑑 = 𝑎2𝑏2 + 2𝑏, 𝑎2𝑏2 + 𝑏, 𝑎2 ± 2, 𝑎2 ± 𝑎.
Theorem 3.1: Let 𝑑 = 𝑎2𝑏2 + 2𝑏. Then
√𝑑 = [𝑎𝑏, 𝑎, 2𝑎𝑏 ].
Proof: Let 𝛼0 = 𝑎2𝑏2 + 2𝑏. It can be seen that
(𝑎𝑏)2 < 𝑎2𝑏2 + 2𝑏 < (𝑎𝑏 + 1)2.
Then, by Theorem 2.1, we get
𝑎0 = ⟦√𝑎2𝑏2 + 2𝑏⟧ = 𝑎𝑏
and therefore
𝛼1 =1
√𝑎2𝑏2+2𝑏−𝑎𝑏=
√𝑎2𝑏2+2𝑏+𝑎𝑏
2𝑏.
On the other hand, since 𝑎𝑏 < √𝑎2𝑏2 + 2𝑏, it follows
that
𝑎𝑏 + 𝑎𝑏
2𝑏= 𝑎 <
√𝑎2𝑏2 + 2𝑏 + 𝑎𝑏
2𝑏< 𝑎 + 1.
Then, by Theorem 2.1, we get
𝑎1 = ⟦𝛼1⟧ = ⟦√𝑎2𝑏2+2𝑏+𝑎𝑏
2𝑏⟧ = 𝑎.
It can be seen that
𝛼2 =1
√𝑎2𝑏2+2𝑏+𝑎𝑏
2𝑏−𝑎
= √𝑎2𝑏2 + 2𝑏 + 𝑎𝑏
and therefore
𝑎2 = ⟦𝛼2⟧ = ⟦√𝑎2𝑏2 + 2𝑏 + 𝑎𝑏⟧ = 2𝑎𝑏
= 2𝑎0.
Thus, by Theorem 2.1, it follows that

Fundamental Solutions To Some Pell Equations M. Güney, R. Keskin
SAU J. Sci. Vol 17, No 1, p. 125-129, 2013 127
√𝑎2𝑏2 + 2𝑏 = [𝑎𝑏, 𝑎, 2𝑎𝑏 ].
Then the proof follows.
Theorem 3.2: Let 𝑑 = 𝑎2𝑏2 + 𝑏. Then
√𝑑 = [𝑎𝑏, 2𝑎, 2𝑎𝑏 ].
Proof: Let 𝛼0 = 𝑎2𝑏2 + 𝑏. It can be seen that
(𝑎𝑏)2 < 𝑎2𝑏2 + 𝑏 < (𝑎𝑏 + 1)2.
Then by Theorem 2.1, we get
𝑎0 = ⟦√𝑎2𝑏2 + 𝑏⟧ = 𝑎𝑏,
and therefore
𝛼1 =1
√𝑎2𝑏2+𝑏−𝑎𝑏=
√𝑎2𝑏2+𝑏+𝑎𝑏
𝑏.
On the other hand, since 𝑎𝑏 < √𝑎2𝑏2 + 𝑏, it follows that
𝑎𝑏+𝑎𝑏
𝑏= 2𝑎 <
√𝑎2𝑏2+𝑏+𝑎𝑏
𝑏< 2𝑎 + 1.
Then, by Theorem 2.1, we get
𝑎1 = ⟦𝛼1⟧ = ⟦√𝑎2𝑏2 + 𝑏 + 𝑎𝑏
𝑏⟧ = 2𝑎
and therefore
𝛼2 =1
√𝑎2𝑏2+𝑏+𝑎𝑏
𝑏− 2𝑎
= √𝑎2𝑏2 + 𝑏 + 𝑎𝑏.
Since 2𝑎𝑏 < √𝑎2𝑏2 + 𝑏 + 𝑎𝑏 < 2𝑎𝑏 + 1, it follows
that
𝑎2 = ⟦𝛼2⟧ = ⟦√𝑎2𝑏2 + 𝑏 + 𝑎𝑏⟧
= 2𝑎𝑏 = 2𝑎0.
Thus, by Theorem 2.1, we get.
√𝑎2𝑏2 + 𝑏 = [𝑎𝑏, 2𝑎, 2𝑎𝑏 ]
This completes the proof.
Theorem 3.3: Let 𝑑 = 𝑎2 + 𝑎. Then
√𝑑 = [𝑎, 2,2𝑎 ].
Proof: Let 𝛼0 = 𝑎2 + 𝑎. Since 𝑎2 < 𝑎2 + 𝑎 < (𝑎 +1)2, it follows that
𝑎0 = ⟦𝛼0⟧ = ⟦√𝑎2 + 𝑎⟧ = 𝑎,
and therefore
𝛼1 =1
√𝑎2 + 𝑎 − 𝑎=
√𝑎2 + 𝑎 + 𝑎
𝑎.
Since 𝑎+𝑎
𝑎= 2 <
√𝑎2+𝑎+𝑎
𝑎< 3, it follows that
𝑎1 = ⟦√𝑎2 + 𝑎 + 𝑎
𝑎⟧ = 2
and therefore
𝛼2 =1
√𝑎2+𝑎+𝑎
𝑎− 2
= √𝑎2 + 𝑎 + 𝑎.
Since 2𝑎 < √𝑎2 + 𝑎 + 𝑎 < 2𝑎 + 1, we get
𝑎2 = ⟦√𝑎2 + 𝑎 + 𝑎⟧ = 2𝑎 = 2𝑎0.
Thus, by Theorem 2.1, we get
√𝑎2 + 𝑎 = [𝑎, 2,2𝑎 ].
This completes the proof.
Theorem 3.4: Let 𝑑 = 𝑎2 − 𝑎. Then
√𝑎2 − 𝑎 = [𝑎 − 1, 2,2(𝑎 − 1) ].
Proof: Let 𝛼0 = 𝑎2 − 𝑎. It can be seen that
(𝑎 − 1)2 < (𝑎2 − 𝑎) < 𝑎2.
Then, by Theorem 2.1, we get
𝑎0 = ⟦√𝑎2 − 𝑎⟧ = 𝑎 − 1
and therefore
𝛼1 =1
√𝑎2−𝑎−(𝑎−1)=
√𝑎2−𝑎+(𝑎−1)
𝑎−1.
Since 𝑎−1+𝑎−1
𝑎−1= 2 <
√𝑎2−𝑎+𝑎−1
𝑎−1< 3, it follows that
𝑎1 = ⟦√𝑎2 − 𝑎 + 𝑎 − 1
𝑎 − 1⟧ = 2

M. Güney, R. Keskin Fundamental Solutions To Some Pell Equations
128 SAU J. Sci. Vol 17, No 1, p. 125-129, 2013
and therefore
𝛼2 =1
√𝑎2−𝑎+𝑎−1
𝑎−1− 2
= √𝑎2 − 𝑎 + (𝑎 − 1).
Since 2(𝑎 − 1) < √𝑎2 − 𝑎 + 𝑎 − 1 < 2𝑎 − 1, it
follows that
𝑎2 = ⟦√𝑎2 − 𝑎 + 𝑎 − 1⟧
= 2(𝑎 − 1) = 2𝑎0.
Thus, by Theorem 2.1, we get
√𝑎2 − 𝑎 = [𝑎 − 1, 2,2(𝑎 − 1) ].
This completes the proof.
Theorem 3.5: Let 𝑑 = 𝑎2 + 2. Then
√𝑎2 + 2 = [𝑎, 𝑎, 2𝑎 ].
Proof: Let 𝛼0 = 𝑎2 + 2. It can be seen that
𝑎2 < (𝑎2 + 2) < (𝑎 + 1)2 .
Then, by Theorem 2.1, we get
𝑎0 = ⟦√𝑎2 + 2⟧ = 𝑎
and therefore
𝛼1 =1
√𝑎2+2−𝑎=
√𝑎2+2+𝑎
2.
Since 𝑎 <√𝑎2+2+𝑎
2< 𝑎 + 1, it follows that
𝑎1 = ⟦√𝑎2 + 2 + 𝑎
2⟧ = 𝑎
and therefore
𝛼2 =1
√𝑎2+2+𝑎
2− 𝑎
= √𝑎2 + 2 + 𝑎.
Thus 𝑎2 = ⟦√𝑎2 + 2 + 𝑎⟧ = 2𝑎 = 2𝑎0. Then, by Theorem 2.1, it follows that
√𝑎2 + 2 = [𝑎, 𝑎, 2𝑎 ].
This completes the proof.
Theorem 3.6: Let 𝑑 = 𝑎2 − 2. Then
√𝑎2 − 2 = [𝑎 − 1, 1, 𝑎 − 2,1,2(𝑎 − 1) ].
Proof: Let 𝛼0 = 𝑎2 − 2. It can be seen that
(𝑎 − 1)2 < (𝑎2 − 2) < 𝑎2.
Then, by Theorem 2.1, we get
𝑎0 = ⟦√𝑎2 − 2⟧ = 𝑎 − 1
and therefore
𝛼1 =1
√𝑎2−2−(𝑎−1)=
√𝑎−2+(𝑎−1)
2𝑎−3.
Since 1 +1
2𝑎−3<
√𝑎2−2+(𝑎−1)
2𝑎−3< 1 +
2
2𝑎−3 , it follows
that
𝑎1 = ⟦√𝑎2 − 2 + (𝑎 − 1)
2𝑎 − 3⟧ = 1
and therefore
𝛼2 =1
√𝑎2−2+(𝑎−1)
2𝑎−3− 1
=√𝑎2−2+(𝑎−2)
2.
Since 𝑎 − 2 +1
2<
√𝑎2−2+(𝑎−2)
2< 𝑎 − 1, it follows that
𝑎2 = ⟦√𝑎2 − 2 + 𝑎 − 2
2⟧ = 𝑎 − 2
and therefore
𝛼3 =1
√𝑎2−2+(𝑎−2)
2− (𝑎 − 2)
=√𝑎2−2+(𝑎−2)
2𝑎−3.
Since 1 <√𝑎2−2+(𝑎−2)
2𝑎−3< 1 +
1
2𝑎−3, we get
𝑎3 = ⟦√𝑎 − 2 + (𝑎 − 2)
2𝑎 − 3⟧ = 1

Fundamental Solutions To Some Pell Equations M. Güney, R. Keskin
SAU J. Sci. Vol 17, No 1, p. 125-129, 2013 129
and therefore
𝛼3 = √𝑎2 − 2 + (𝑎 − 1).
Since 2(𝑎 − 1) < √𝑎2 − 2 + (𝑎 − 1) < 2𝑎 − 1, it
follows that
𝑎3 = ⟦√𝑎2 − 2 + (𝑎 − 1)⟧ = 2(𝑎 − 1)
= 2𝑎𝑜
Thus, by Theorem 2.1, we get
√𝑎2 − 2 = [𝑎 − 1, 1, 𝑎 − 2,1,2(𝑎 − 1) ].
This completes the proof.
Now we give the fundamental solution to the equation
𝑥² − 𝑑𝑦² = 1 when 𝑑 ∈ {𝑎2𝑏2 + 2𝑏, 𝑎2𝑏2 + 𝑏, 𝑎2 ±2, 𝑎2 ± 𝑎}.
Corollary 1: Let 𝑑 = 𝑎2𝑏2 + 2𝑏. Then the fundamental
solution to the equation 𝑥² − 𝑑𝑦² = 1 is
𝑥1 + 𝑦1√𝑑 = 𝑎2𝑏 + 1 + 𝑎 √𝑑.
Proof: The period of length of continued fraction of
√𝑎2𝑏2 + 2𝑏 is 2 by Theorem 3.1. Therefore the
fundamental solution to the equation 𝑥² − 𝑑𝑦² = 1 is
𝑝1 + 𝑞1√𝑑 by Lemma 2.2. Since
𝑝1
𝑞1
= 𝑎0 +1
𝑎1
= 𝑎𝑏 +1
𝑎=
𝑎2𝑏 + 1
𝑎,
the proof follows.
Since the proofs of the following corollaries are similar,
we omit them.
Corollary 2: Let 𝑑 = 𝑎2𝑏2 + 𝑏. Then the fundamental
solution to the equation 𝑥² − 𝑑𝑦² = 1 is
𝑥1 + 𝑦1√𝑑 = 2𝑎2𝑏 + 1 + 2𝑎 √𝑑.
Corollary 3: Let 𝑑 = 𝑎2 + 2. Then the fundamental
solution to the equation 𝑥² − 𝑑𝑦² = 1 is
𝑥1 + 𝑦1√𝑑 = 𝑎2 + 1 + 𝑎 √𝑑.
Corollary 4: Let 𝑑 = 𝑎2 + 𝑎. Then the fundamental
solution to the equation 𝑥² − 𝑑𝑦² = 1 is
𝑥1 + 𝑦1√𝑑 = 2𝑎 + 1 + 2 √𝑑.
Corollary 5: Let 𝑑 = 𝑎2 − 𝑎. Then the fundamental
solution to the equation 𝑥² − 𝑑𝑦² = 1 is
𝑥1 + 𝑦1√𝑑 = 2𝑎 − 1 + 2 √𝑑.
Corollary 6: Let 𝑑 = 𝑎2 − 2. Then the fundamental
solution to the equation 𝑥² − 𝑑𝑦² = 1 is
𝑥1 + 𝑦1√𝑑 = 𝑎2 − 1 + 𝑎 √𝑑.
Proof: The period of length of continued fraction of
√𝑎2 − 2 is 4 by Theorem 3.6. Therefore the fundamental
solution to the equation 𝑥² − 𝑑𝑦² = 1 is 𝑝3 + 𝑞3√𝑑 by
Lemma 2.2. Since
𝑝𝟑
𝑞𝟑= (𝑎 − 1) +
1
1+1
(𝑎−2)+11
=𝑎2−1
𝑎,
the proof follows.
From Lemma 2.2, we can give the following corollary.
Corollary 7: Let 𝑑 ∈ {𝑎2𝑏2 + 2𝑏, 𝑎2𝑏2 + 𝑏, 𝑎2 ±2, 𝑎2 ± 𝑎}. Then the equation 𝑥² − 𝑑𝑦² = −1 has no
integer solutions.
REFERENCES
[1] Adler, A. and Coury, J. E., The Theory of Numbers:
A Text and Source Book of Problems, Jones and Bartlett
Publishers, Boston, MA, 1995.
[2] R. Mollin, Fundamental Number Theory with
Applications, Crc Press, 1998.
[3] T. Nagell, Introduction to Number Theory, Chelsea
Publishing Company, New York, 1981.
[4] Don Redmond, Number Theory: An Introduction,
Markel Dekker, Inc, 1996.
[5] John P. Robertson, Solving the generalized Pell
equation 𝑥2 − 𝐷𝑦2 = 𝑁, http://hometown.aol.com/jpr2718/pell .pdf, May 2003.


SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 131-138, 2013 SAU J. Sci. Vol 17, No 1, p. 131-138, 2013
131
Bulanık yapay sinir ağıyla dört serbestlik dereceli bir robot kolunun kontrolü
Şinasi ARSLAN1*, Mehmet KORKMAZ1 1Sakarya Üniversitesi, Makine Mühendisliği Bölümü, SAKARYA
07.05.2012 Geliş/Received, 15.11.2012 Kabul/Accepted
ÖZET
Bu çalışmada, dört serbestlik dereceli bir robot kolu için bulanık yapay sinir ağ tabanlı hesaplanan tork kontrolü
önerilmiştir. Bu tür dört mafsallı robot kolları çoğunlukla endüstriyel uygulamalarda kullanıldığından yüksek hareket
ve hassasiyetlik kabiliyetlerine sahip olup yüksek performanslı olmaları istenir. Bunun yanı sıra yüksek hızda
çalışma ve robot kollarına uygulanan dış yükler, robot kontrolünde önemli bir rol oynamaktadır. Bu amaçla, robotun
verilen yörüngeleri en iyi şekilde takip edebilmesi için hesaplanan tork yöntemi geliştirilmiş ve bu yöntemin bulanık
yapay sinir ağıyla birleşimi olan kontrolörün geri beslemeli kontrolünün iyileştirilmesi sağlanmıştır. Elde edilen
simülasyon sonuçları, önerilen kontrol yönteminin oldukça başarılı olduğunu ispatlamıştır.
Anahtar kelimeler: Bulanık yapay sinir ağları, dört serbestlik dereceli robot kolu, hesaplanan tork yöntemi, düz ve
ters kinematik, geri beslemeli kontrol.
Four degree freedom robot arm with fuzzy neural network control
ABSTRACT
In this study, the control of four degree freedom robot arm has been realized with the computed torque control
method.. It is usually required that the four jointed robot arm has high precision capability and good maneuverability
for using in industrial applications. Besides, high speed working and external applied loads have been acting as
important roles. For those purposes, the computed torque control method has been developed in a good manner that
the robot arm can track the given trajectory, which has been able to enhance the feedback control together with fuzzy
neural network control. The simulation results have proved that the computed torque control with the neural network
has been so successful in robot control.
Key words: Fuzzy neural networks, four degree freedom robot arm, computed torque control, forward and inverse
kinematics, feedback control.
* Sorumlu Yazar / Corresponding Author
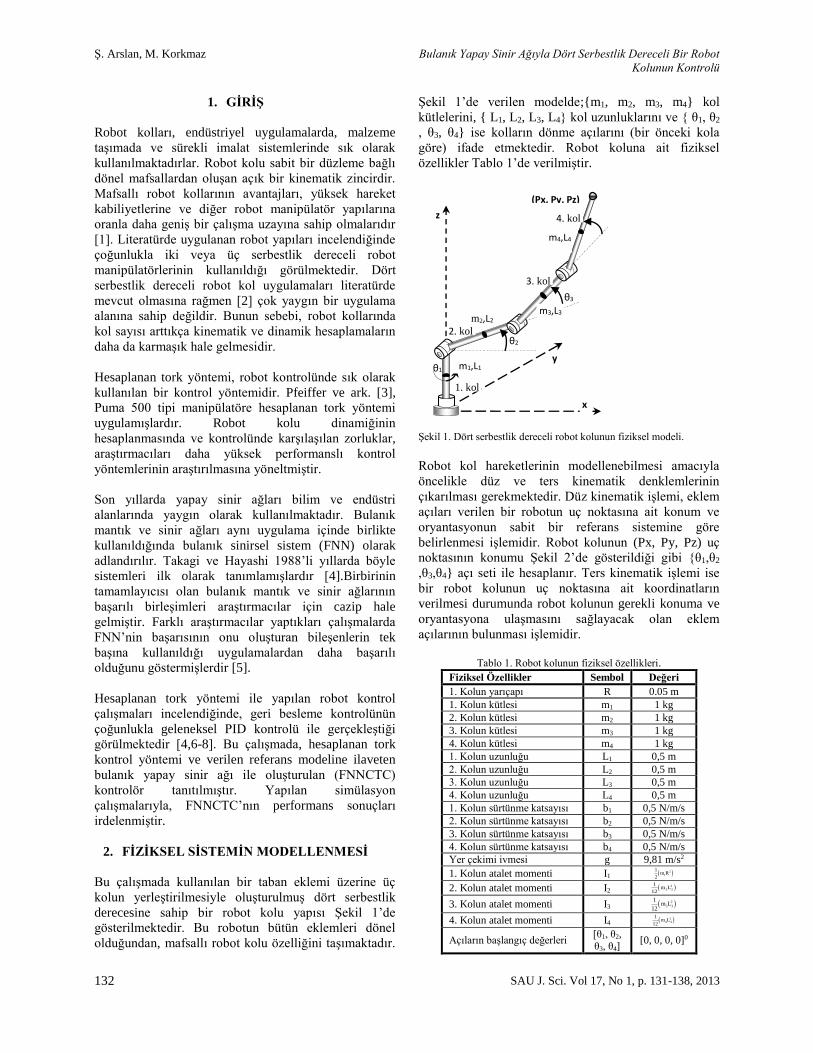
Ş. Arslan, M. Korkmaz Bulanık Yapay Sinir Ağıyla Dört Serbestlik Dereceli Bir Robot
Kolunun Kontrolü
132 SAU J. Sci. Vol 17, No 1, p. 131-138, 2013
1. GİRİŞ
Robot kolları, endüstriyel uygulamalarda, malzeme
taşımada ve sürekli imalat sistemlerinde sık olarak
kullanılmaktadırlar. Robot kolu sabit bir düzleme bağlı
dönel mafsallardan oluşan açık bir kinematik zincirdir.
Mafsallı robot kollarının avantajları, yüksek hareket
kabiliyetlerine ve diğer robot manipülatör yapılarına
oranla daha geniş bir çalışma uzayına sahip olmalarıdır
[1]. Literatürde uygulanan robot yapıları incelendiğinde
çoğunlukla iki veya üç serbestlik dereceli robot
manipülatörlerinin kullanıldığı görülmektedir. Dört
serbestlik dereceli robot kol uygulamaları literatürde
mevcut olmasına rağmen [2] çok yaygın bir uygulama
alanına sahip değildir. Bunun sebebi, robot kollarında
kol sayısı arttıkça kinematik ve dinamik hesaplamaların
daha da karmaşık hale gelmesidir.
Hesaplanan tork yöntemi, robot kontrolünde sık olarak
kullanılan bir kontrol yöntemidir. Pfeiffer ve ark. [3],
Puma 500 tipi manipülatöre hesaplanan tork yöntemi
uygulamışlardır. Robot kolu dinamiğinin
hesaplanmasında ve kontrolünde karşılaşılan zorluklar,
araştırmacıları daha yüksek performanslı kontrol
yöntemlerinin araştırılmasına yöneltmiştir.
Son yıllarda yapay sinir ağları bilim ve endüstri
alanlarında yaygın olarak kullanılmaktadır. Bulanık
mantık ve sinir ağları aynı uygulama içinde birlikte
kullanıldığında bulanık sinirsel sistem (FNN) olarak
adlandırılır. Takagi ve Hayashi 1988’li yıllarda böyle
sistemleri ilk olarak tanımlamışlardır [4].Birbirinin
tamamlayıcısı olan bulanık mantık ve sinir ağlarının
başarılı birleşimleri araştırmacılar için cazip hale
gelmiştir. Farklı araştırmacılar yaptıkları çalışmalarda
FNN’nin başarısının onu oluşturan bileşenlerin tek
başına kullanıldığı uygulamalardan daha başarılı
olduğunu göstermişlerdir [5].
Hesaplanan tork yöntemi ile yapılan robot kontrol
çalışmaları incelendiğinde, geri besleme kontrolünün
çoğunlukla geleneksel PID kontrolü ile gerçekleştiği
görülmektedir [4,6-8]. Bu çalışmada, hesaplanan tork
kontrol yöntemi ve verilen referans modeline ilaveten
bulanık yapay sinir ağı ile oluşturulan (FNNCTC)
kontrolör tanıtılmıştır. Yapılan simülasyon
çalışmalarıyla, FNNCTC’nın performans sonuçları
irdelenmiştir.
2. FİZİKSEL SİSTEMİN MODELLENMESİ
Bu çalışmada kullanılan bir taban eklemi üzerine üç
kolun yerleştirilmesiyle oluşturulmuş dört serbestlik
derecesine sahip bir robot kolu yapısı Şekil 1’de
gösterilmektedir. Bu robotun bütün eklemleri dönel
olduğundan, mafsallı robot kolu özelliğini taşımaktadır.
Şekil 1’de verilen modelde;{m1, m2, m3, m4} kol
kütlelerini, { L1, L2, L3, L4} kol uzunluklarını ve { θ1, θ2
, θ3, θ4} ise kolların dönme açılarını (bir önceki kola
göre) ifade etmektedir. Robot koluna ait fiziksel
özellikler Tablo 1’de verilmiştir.
Şekil 1. Dört serbestlik dereceli robot kolunun fiziksel modeli.
Robot kol hareketlerinin modellenebilmesi amacıyla
öncelikle düz ve ters kinematik denklemlerinin
çıkarılması gerekmektedir. Düz kinematik işlemi, eklem
açıları verilen bir robotun uç noktasına ait konum ve
oryantasyonun sabit bir referans sistemine göre
belirlenmesi işlemidir. Robot kolunun (Px, Py, Pz) uç
noktasının konumu Şekil 2’de gösterildiği gibi {θ1,θ2
,θ3,θ4} açı seti ile hesaplanır. Ters kinematik işlemi ise
bir robot kolunun uç noktasına ait koordinatların
verilmesi durumunda robot kolunun gerekli konuma ve
oryantasyona ulaşmasını sağlayacak olan eklem
açılarının bulunması işlemidir.
Tablo 1. Robot kolunun fiziksel özellikleri.
Fiziksel Özellikler Sembol Değeri
1. Kolun yarıçapı R 0.05 m
1. Kolun kütlesi m1 1 kg
2. Kolun kütlesi m2 1 kg
3. Kolun kütlesi m3 1 kg
4. Kolun kütlesi m4 1 kg
1. Kolun uzunluğu L1 0,5 m
2. Kolun uzunluğu L2 0,5 m
3. Kolun uzunluğu L3 0,5 m
4. Kolun uzunluğu L4 0,5 m
1. Kolun sürtünme katsayısı b1 0,5 N/m/s
2. Kolun sürtünme katsayısı b2 0,5 N/m/s
3. Kolun sürtünme katsayısı b3 0,5 N/m/s
4. Kolun sürtünme katsayısı b4 0,5 N/m/s
Yer çekimi ivmesi g 9,81 m/s2
1. Kolun atalet momenti I1 2
1
1m R
2
2. Kolun atalet momenti I2 2
2 2
1m L
12
3. Kolun atalet momenti I3 2
3 3
1m L
12
4. Kolun atalet momenti I4 2
4 4
1m L
12
Açıların başlangıç değerleri [θ1, θ2, θ3, θ4]
[0, 0, 0, 0]0
θ1
θ2
θ3
m3,L3
m4,L4
m2,L2
m1,L1
1. kol
2. kol
3. kol
4. kol
(Px, Py, Pz)
y
x
z

Bulanık Yapay Sinir Ağıyla Dört Serbestlik Dereceli Bir Robot
Kolunun Kontrolü
Ş. Arslan, M. Korkmaz
SAU J. Sci. Vol 17, No 1, p. 131-138, 2013 133
Şekil 2’de verilen robot kolu aşırı serbestlik dereceli bir
robot kolu olduğundan verilen bir P(x,y,z) konumu için
sonsuz sayıda çözüm üretilebilir. Bu sebeple, kollardan
birinin kontrol kolu olarak seçilmesi ve açısal
değerlerinin kullanıcı tarafından yerine getirilmek
istenen göreve göre tayin edilmesi gerekmektedir. Bu
çalışmada 4. kol, kontrol kolu olarak seçilmiştir.
Şekil 2. Dört serbestlik dereceli robot kolunun verilen noktaya
ulaşması.
Dört serbestlik dereceli robot kolunun dinamik
modelinin çıkarılmasında Lagrange-Euler yöntemi
kullanılmıştır. Bu yöntem, bir sistemin toplam
enerjisinden yola çıkarak hareket denklemlerinin elde
edilmesini amaçlar [13]. Lagrange-Euler denklemi,
i
i i i
d L L DQ = - + , i=1, 2, ... ,n ;
dt q q q
L K P
(1)
ifade edilir. Burada; iq (i) inci eklemin genelleştirilmiş
koordinatları, iq (i) inci eklemin genelleştirilmiş hızları,
iQ genelleştirilmiş (i) inci kuvvet, L Lagrange
fonksiyonu, K toplam kinetik enerjiyi, P toplam
potansiyel enerjiyi ve D toplam kayıp enerjiyi gösterir.
Robotun toplam kinetik enerjisi, 4
2 2
i i i
i=1
1 1K= m v + Iω
2 2
(2)
denklemi ile elde edilir. Burada; i (i) inci eklemin
açısal hızı, iv (i) inci eklemin ağırlık merkezinin
doğrusal hızı ve im (i) inci eklemin kütlesidir. Robot
kolunun toplam potansiyel enerjisi,
22 1 2 3 1 2 2
33 4 1 2 2
43 3 4
LP=m g(L + sinθ )+m g(L +L sinθ
2
L + sinθ )+m g(L +L sinθ +
2
LL sinθ + sinθ )
2
(3)
denklemi ile bulunur. Robot kolunun toplam sürtünme
kayıp enerjisi,
2 2 2 2
1 1 2 2 3 3 4 4
1 1 1 1D= b θ + b θ + b θ + b θ
2 2 2 2
(4)
denklem takımı ile ifade edilir. Burada; ib (i) inci
eklemin sürtünme katsayısıdır. Elde edilen enerji
ifadeler Denklem 1’de kullanarak,
dτ=M(q)q+H(q,q)q+F(q)+G(q)+τ ;
dN(q,q)=H(q,q)q+F(q)+G(q)+τ ;
τ=M(q)q+N(q,q)q;
(5)
doğrusal olmayan bir diferansiyel denklem takımı elde
edilir. Burada; M(q) nxn boyutlu kütle matrisini,
H(q,q) nx1 boyutlu merkezkaç ve Coriolis matrisini,
F(q) nx1 boyutlu sürtünme matrisini, G(q) nx1
boyutlu yerçekimi matrisini, d bozucu etkileri ve
kollara uygulanan torku ifade etmektedir.
3. HESAPLANAN TORK KONTROL YÖNTEMİ
Tasarlanan kontrolör, kolun hareketi boyunca referans
modelden gelen her bir dönel mafsala ait referans
yörüngeleri takip edecek mafsallara ait torkları
üretmektedir. Kontrolörler, referans yörünge ve robot
kolu dinamik modelinden elde edilen mafsal açı
değerlerini girdi olarak alır ve mafsallara uygulanacak
tork değerlerini çıktı olarak üretir.
Hesaplanan tork kontrol (CTC) bir model tabanlı
kontrol sistemidir. Robot kolunun her bir mafsalı için
gerekli olan torklar Denklem 5’den hesaplanır. Sistemin
ters kinematiğinden elde edilen dq istenen ivmenin
kontrolör ile düzetilmesi sonucu uq birim atalet ivmesi
oluşur. Her bir mafsala uygulanan torklar bu kontrol
sinyali ile ayarlanan hesaplanan tork sistemine giriş
sinyali olarak verilir.
Burada strateji iki kademelidir. İlk olarak doğrusal
sistem tasarım teknikleri kullanılarak takip hatasını
Hedef konum
(Px, Py, Pz)
x
Ѳ1
Ѳ2
Ѳ3 Ѳ4

Ş. Arslan, M. Korkmaz Bulanık Yapay Sinir Ağıyla Dört Serbestlik Dereceli Bir Robot
Kolunun Kontrolü
134 SAU J. Sci. Vol 17, No 1, p. 131-138, 2013
iyileştirecek bir u t bulunacak ve daha sonra gerekli
kol torkları hesaplanacaktır. Bu durum,
dτ=M q q +u +N q,q
(6)
ifade edilir. Bu arzu edilen yörüngenin takibini
garantileyen, doğrusal olmayan bir kontrol kuralıdır.
Robot kolunun takip etmesi istenen yörüngenin önceden
tanımlanacağı gerçeğinden yola çıkarak takip hatası,
de t =q t -q t
(7)
hesaplanır. Denklem 7’de verilen ifadenin iki kere
türevi alınırsa, Brunovsky kanonik formu [8], T
T Tx e e ifadesine bağlı olarak,
e 0 1 e 0d= + u
e 0 0 e 1dt
(8)
elde edilebilir. Denklem 6’dan yola çıkarak kontrol
sinyali,
-1
du=q +M q N q,q -τ
(9)
yazılabilir. Denklem5’de verilen ve doğrusal olmayan
ifadenin, Denklem8’de verilen doğrusal dinamik
denkleme eşdeğer kılan ( ) torkun hesaplanmasına
dayanır.
3.1 PID Tabanlı Hesaplanan Tork Yöntemi
u t kontrol sinyalinin hesaplanması için PID tabanlı
hesaplanan tork kontrol (PIDCTC) yöntemi
kullanılırsa, kol torkları,
d v p iτ=M q q +K e+K e+K edt +N q,q ;
d v p iτ'=M q q +K e+K e+K edt
(10)
ifade edilebilir. Buradan yola çıkarak takip hatası,
v p iu= K e+K e+K edt
(11)
elde edilir.
PIDCTC yöntemi üzerine yapılan bazı çalışmalar[6],
PID kontrolünün yüksek hata takibinde yüksek kazanç
değerleri gerektirdiğini ve sistemi zorladığını
göstermiştir. Bu sebeple, PID dışında robot kontrolünde
sık olarak tercih edilen bulanık sinirsel ağ tabanlı
kontrol yöntemi uygulanacaktır.
3.2. Bulanık Sinirsel Ağ Tabanlı Hesaplanan Tork
Kontrol Yöntemi
Bu çalışmada, bulanık yapay sinirsel ağ tabanlı
hesaplanan tork kontrol yönteminde bulanık mantık ve
yapay sinir ağların birleşimine referans model yapısı [8]
ilavesi ile dörtlü yeni bir (FNNCTC) kontrolör
önerilmiştir. Robot kolu kontrolünde bu dörtlü
birleşimin, kendi aralarındaki etkileşim ile birbirlerinin
eksiklerini tamamlamaları sayesinde daha yetenekli yeni
bir kontrolör yaklaşımı getireceği düşünülmektedir.
Sinir ağları ile sunulan bilgideki anlaşılma zorluğu,
bulanık mantığın sözel terimleri ve eğer–o halde
kuralları ile ortadan kaldırılabilir. Bu sayede anlaşılırlığı
kolay, sözel dille ifade edilebilen çıktılar elde edilerek
bulanık mantık yardımıyla sinirsel ağlara öğrenme
yeteneği kazandırılabilir[9].Özetle, FNNCTC’de
bulanık mantık kavramları ile klasik sinir ağlarının bilgi
sunum yetenekleri zenginleştirilmektedir.
Sadece robot dinamiğine bağlı olan hesaplanan tork
kontrol yöntemi (CTC) ile geleneksel kontrolörün
istenen performansı yakalaması zordur. Bu çalışmada,
FNN ile CTC birleşiminden ortaya çıkan sinerjiyle Şekil
3’de gösterilen bir FNNCTC kontrolörü ile robot
kolunun yörünge kontrolü gerçekleştirilmiştir. FNN gibi
öğrenebilen kontrolörün yörünge takibinde kullanımı
giderek artmaktadır [10].
Şekil 3. Hesaplanan tork kontrol sistemi.
q
FNN
+
N q,q
q M(q) Robot Sistemi
Referans Model
dq
dq
q
+
uq
+
+
+
e
-
u
TersKinematik
d/dt
d/dt
rq
+ -

Bulanık Yapay Sinir Ağıyla Dört Serbestlik Dereceli Bir Robot
Kolunun Kontrolü
Ş. Arslan, M. Korkmaz
SAU J. Sci. Vol 17, No 1, p. 131-138, 2013 135
Bulanık mantık sisteminin yapay sinir ağı kullanılarak
ifade edilmesi, yapay sinir ağının öğrenme yeteneği
sayesinde bulanık mantık parametrelerinin otomatik
olarak ayarlanması avantajını sağlar. Robot kolu
kontrolü amacı ile referans model ve CTC yapısı
altındaki FNN kontrolörü, sistemin ters
kinematiğinden ve ters dinamiğinden robot kolunun
her bir mafsalına ait dönme açısının hatasını ve hata
değişimini giriş olarak alıp u(t) düzeltici kontrol
çıktısını oluşturmaktadır. Bu önerilen FNN yaklaşımı
Şekil 4’de verilmektedir.
Şekilde görüldüğü gibi burada bir giriş, bir çıkış ve
iki gizli katman mevcuttur. İlk katmanda giriş değeri
bulanıklaştırılır. Bulanıklaştırma işlemi için
bulanıklaştırıcı sinirsel bulanık ağ yapısı
kullanılmaktadır. Daha sonra bulanık girişler sinirsel
bulanık ağa uygulanmaktadır. İkinci katman kural
katmanı olarak kullanılmaktadır. Üçüncü katman
kural sonuç katmanıdır. Dördüncü katman ise
durulaştırma katmanıdır. Önerilen FNN yaklaşımının
açıklanması her bir katman için aşağıdaki gibidir:
1. Katman: Robotun her bir mafsalı için {e}
konum hatası ve {e} konum hatası değişimi olmak
üzere hem CTC hem de referans modele ait dört
tane düğüm (nöron) vardır. Her düğüm bir giriş
değerine karşılık gelmektedir. Bu katmanda alınan
veriler herhangi bir işleme veya değişikliğe tabi
tutulmaksızın ikinci katmana iletilirler. Bu
katmana giriş katmanı adı verilir.
2. Katman: Her bir düğüm, katman 1’deki her bir
giriş değerinin sözel ifadesine karşılık
gelmektedir. Çıkış bağlantıları her bir giriş
değerinin bulanık kümedeki derecesi olan üyelik
değerlerini temsil etmektedir. Her bir bulanık
verinin hangi kümeye ait olduğunu belirler. Her
bir düğüm için bulanık işlevci olarak,
2
i ji
2ji
ji
x -m
σ
Aμ =e
(12)
Gauss tipi üyelik fonksiyonu seçilmiştir. Burada; 2.
katmandaki( i ) inci düğümün i d d m mx e ,e ,e ,e
giriş değişkeni ile 3. Katmandaki ( j) inci düğümün
jim Gauss fonksiyonunun merkezini ve ij Gauss
fonksiyonunun genişliğini ifade eder. jim ve ij
terimleri değiştirilerek aynı düğüm için farklı sayıda
üyelik fonksiyonu elde etmek mümkündür. Bu
katman bulanıklaştırma katmanıdır.
Şekil 4. Bulanık mantık tabanlı yapay sinir ağı yapısı.
3. Katman:Her bir düğüm bir bulanık mantık
kuralının ön koşul kısmını temsil eder. Girişlerine
gelen işaretleri çarpıp çarpım sonuçlarını bir veri
seti içerisinde en küçük olanı,
ji
j iAO =min μ x
(13)
ile bulunur. j ’inci düğümünün çıkışını temsil
etmek şartıyla kuralın ateşleme gücü,
ji
j iAi
O = μ x
(14)
ile ifade edilir. Bu katman kural çıkış katmanıdır.
4. Katman:Tek düğüme gelen işaretler
toplanarak kontrol işareti oluşturulur. İşlevi
durulamadır. FNN çıkışı,
n
k jk j
j=1
O = w O
(15)
ile ifade edilir. Burada; jkw bağlantı ağırlığını j inci
kuralın çıkış etki gücüdür. Bu katman kural sonuç
katmanıdır.
Giriş Katmanı
1
1
A
de
Gizli Katman Çıkış Katmanı
me
me
de
1
n 1
A
4
1
A
1
n
A
4
n
A
4
2
A
4
n 1
A
1O
4w
nO
k
i
j
kOu
1w
2w
3w

Ş. Arslan, M. Korkmaz Bulanık Yapay Sinir Ağıyla Dört Serbestlik Dereceli Bir Robot
Kolunun Kontrolü
136 SAU J. Sci. Vol 17, No 1, p. 131-138, 2013
FNN’deki her katmandaki işlem ağırlık katsayıları
çıkış başarımına bağlı olarak giriş katmanlarına doğru
geriye yayılma öğrenme kuralı ile yapılır. Gözlemcili
eğim düşüşü yöntemi kullanarak yapılan geriye
yayılma öğrenmesi için önce performans ölçütü,
2
m m
1J = θ -θ ;
2
2
d d
1J = θ -θ
2
(16)
tanımlanır. Burada; m dθ ,θ ,θ herhangi bir mafsala
ait mθ referans modelden, dθ ters kinematikten ve
θ ters dinamikten gelen dönme açıları seti;
m de ,e referans modelden ve ters kinematikten gelen
dönme açılarının hataları seti, m dJ ,J referans
modeli ve ters kinematik için performans ölçütü
setleridir. Genel olarak performans ölçütü J ve
mafsal açılarındaki hata e ile gösterilirse, FNN’de
gerçek zamanda parametre güncelleme algoritmasını
elde etmek için performans ölçütü,
21J= e
2
(17)
olarak tanımlanabilir. 4. katmanda hatanın geriye
doğru yayılımı,
4
k
k k k
J J e J e θ=- =- =-
O e O e θ O
(18)
ile ifade edilir. 4. katmandan başlayarak her
defasında bir katman geriye giderek ilk katmana
doğru işlem tekrarlanır. Bu durumda ağırlıklar,
4
jw k+1 =w k -ηδ O
(19)
ile güncellenebilir. Denklem 19’da verilen; öğrenme
oranı olarak ifade edilir. 3.katmanda hata,
3 4kj j
j k j
OJ J=- =- = w
O O O
(20)
hesaplanır ve yayılır. 2.katmanda ise hata,
(21)
ile hesaplanır. Üyelik işlevinin sırasıyla, jim
merkezini ve ji genişliğini belirleyen parametreleri,
2
i ji2
ji ji m ji 2
ji
x -mm k+1 =m k -η δ
2 σ
(22)
2
i ji2
ji ji σ ji 2
ji
x -mσ k+1 =σ k -η δ
2 σ
(23)
ile güncellenerek alacağı yeni değerler hesaplanabilir.
Burada; m öğrenme oranı,jim parametreleri ve
öğrenme oranı,ji
parametreleri için tayin edilir.
Dördüncü katmandaki hata delta uyarlama kuralı ile
bulunur. Bu çalışmada hatanın,
4 eAe B
t
(24)
ile bulunması önerilmiştir [8]. Burada; A ve B kazanç
katsayıları, {e} hatadır.
Giriş katmanında her bir mafsal için giriş işareti
olarak { e, e} mafsal açı hatası ve hatasının türevini
alan FNN, çıkış katmanında {u } kontrol sinyalini
üretir. Ağırlık değiştirme denklemleri ağdaki ortalama
hata karesini en küçük yapacak şekilde ayarlanır. Bu
çalışmada eğim düşüşü hesabında tanjant hiperbolik
fonksiyonu kullanılmıştır.
4. SİMÜLASYON ÇALIŞMALARI
Robot kolu için önerilen kontrolörlerin performans
değerlendirmeleri tek nokta hedef ve çember yörünge
takipleri ile gerçekleştirilmiştir. Yapılan hareket
analizleri, MATLAB Simulink ortamında
gerçekleştirilmiştir. Şekil 5 ve 6’da tek nokta hedef
hareketleri ve Şekil 7 ve 8’de çember yörünge
takipleri verilmiştir.
Şekil 5. PIDCTC-tek nokta hedef hareketi.
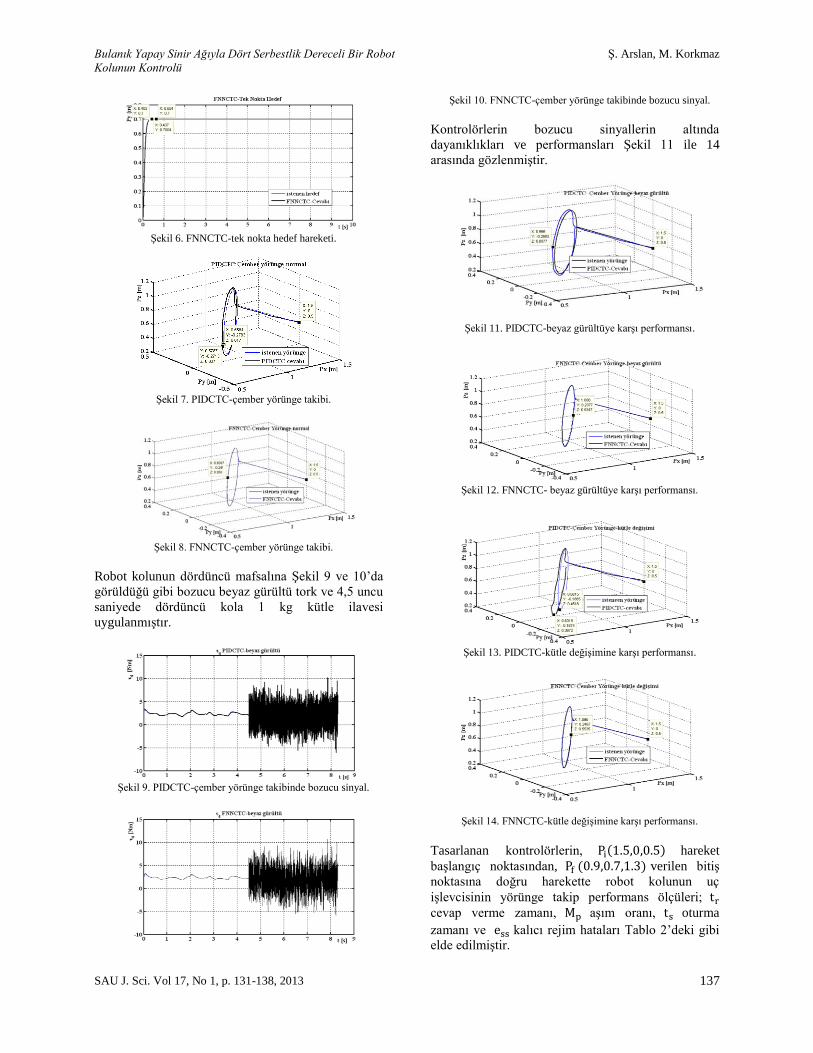
Bulanık Yapay Sinir Ağıyla Dört Serbestlik Dereceli Bir Robot
Kolunun Kontrolü
Ş. Arslan, M. Korkmaz
SAU J. Sci. Vol 17, No 1, p. 131-138, 2013 137
Şekil 6. FNNCTC-tek nokta hedef hareketi.
Şekil 7. PIDCTC-çember yörünge takibi.
Şekil 8. FNNCTC-çember yörünge takibi.
Robot kolunun dördüncü mafsalına Şekil 9 ve 10’da
görüldüğü gibi bozucu beyaz gürültü tork ve 4,5 uncu
saniyede dördüncü kola 1 kg kütle ilavesi
uygulanmıştır.
Şekil 9. PIDCTC-çember yörünge takibinde bozucu sinyal.
Şekil 10. FNNCTC-çember yörünge takibinde bozucu sinyal.
Kontrolörlerin bozucu sinyallerin altında
dayanıklıkları ve performansları Şekil 11 ile 14
arasında gözlenmiştir.
Şekil 11. PIDCTC-beyaz gürültüye karşı performansı.
Şekil 12. FNNCTC- beyaz gürültüye karşı performansı.
Şekil 13. PIDCTC-kütle değişimine karşı performansı.
Şekil 14. FNNCTC-kütle değişimine karşı performansı.
Tasarlanan kontrolörlerin, Pi(1.5,0,0.5) hareket
başlangıç noktasından, Pf (0.9,0.7,1.3) verilen bitiş
noktasına doğru harekette robot kolunun uç
işlevcisinin yörünge takip performans ölçüleri; tr
cevap verme zamanı, Mp aşım oranı, ts oturma
zamanı ve ess kalıcı rejim hataları Tablo 2’deki gibi
elde edilmiştir.

Ş. Arslan, M. Korkmaz Bulanık Yapay Sinir Ağıyla Dört Serbestlik Dereceli Bir Robot
Kolunun Kontrolü
138 SAU J. Sci. Vol 17, No 1, p. 131-138, 2013
Tablo 2. Tek noktaya ulaşmada kontrolörlerin performansı.
Kontrolör tr [s] Mp (%) ts [s] ess [m]
PIDCTC 1.036 0.0016 2.866 4x10-4
FNNCTC 0.463 0.0004 0.654 0
5. SONUÇLAR
Simülasyon şekillerinden görüldüğü gibi, hesaplanan
tork yönteminde geri besleme doğrusallaştırmasında
uygulanan iki farklı kontrol yönteminde, FNNCTC
yöntemi daha başarılı performans göstermiştir.
PIDCTC’nin geri besleme kontrol uygulamasında,
hedefin başarılı bir şekilde takip edildiği, ancak
referans yörünge ile çıkan sonuçlar arasında kısmi
farklar oluştuğu tespit edilmiştir. Ayrıca, tek nokta
takibi performans tablosundan da görüldüğü gibi
PIDCTC’de oturma zamanı, FNNCTC’ne göre
oldukça uzundur. Bozucu sinyalsiz yapılan geri
besleme kontrolünde, FNNCTC’nin PID kontrolüne
oranla daha başarılı bir hata takibi sergilediği ve
oturma zamanının PID kontrolüne oranla çok daha
kısa olduğu, simülasyon sonuçlarından ve performans
tablosundan anlaşılmaktadır.
FNNCTC uygulamasında takip hatasının sıfıra daha
çok yaklaştırılabildiği ve bu sebeple PID kontrolörüne
oranla daha düşük olması da FNNCTC’nü daha
kullanışlı hale getirmektedir.
FNNCTC öğrenebilme yetenekleri, hata takibinin
minimize edilmesinde önemli bir avantajdır. Ancak
hareketin başlangıcında yapay sinir ağı nöronlarını
birbirine bağlayan ağırlıkların güncellenmesi sistemin
kısmi bir salınıma maruz kalmasına sebep olmaktadır.
Bu da yapay sinir ağlarının, gerçekleştirilecek olan
harekete göre kendini adapte etmesine kadar geçen
süreye bağlı olarak beklenen performansı
gerçekleştirmesini zorlaştırmaktadır. Sürekli değişken
yörüngeli sistemlerde ise bu durum, performansın
düşmesine sebep olmakta ve hata takibinin sıfıra
indirgenmesini daha da zorlaştırmaktadır.
Elde edilen sonuçlar, geleneksel kontrolör olan
PID’ye alternatif olarak, FNNCTC yöntemiyle robot
kolu kontrolü gibi önceden bilinen referans
yörüngelerinin uygulamalarında daha başarılı ve
dayanıklı olacağı düşünülmektedir.
KAYNAKLAR
[1]
N-Nagy, F., and Siegler, A., “Engineering
Foundations of Robotics”, Prentice-Hall
International, 1987.
[2]
Chen K., Zhang L., and Zhang Y., “Cyclic Motion
Generation of Multi-Link Planar Robot Performing
Square End-Effector Trajectory Analyzed via
Gradient-Descent and Zhang et al.’s Neural-
Dynamic Methods”, Sun Vat-Sen University,
Guangzhou, China, 2008.
[3] Pfeiffer L.E., Khatib O., and Hake. J., “'Joint
Torque Sensory Feedback in the Control of a Puma
Manipulator." IEEE Transactions Robotics and
Automation, vol. 5, no. 4, 1989.
[4] Takagi, H., “Fusion Technology of Neural
Networks and Fuzzy Systems: A Chronicled
Progression from the Laboratory to Our daily
Lives”, International Journal of Applied
Mathematics and Computer Science, Vol. 10, No.
4, pp. 647-673, 2000.
[5] Pedrycz, W., “Computational Intelligence: An
Introduction”, CRC-Press, 1999.
[6]
Sankaran J., “Real-Time Computed Torque
Control of Flexible-Joint Robots”, Master of
Applied Sicence, Department of Mechanical,
University of Toronto, 1997.
[7] Asada H., Kanade T., and Takeyama I., “Control of
a Direct Drive Arm”, Transactions of ASME, vol.
105, 1983.
[8] Canberi, O., ve Kuzucu, A., “Bulanık Yapay Sinir
Ağıyla Model Referans Robot Denetimi”, İTÜ
Makine Fakültesi, Makine Mühendisliği Bölümü,
Gümüşsuyu, İstanbul, 2005.
[9] Baykal, N., Beyan, T., “Bulanık Mantık Uzman
Sistemler ve Denetleyiciler”, Bıçaklar kitapevi,
Ankara, 2004.
[10] Koo, T. J., “Stable model reference adaptive fuzzy
control of a class of nonlinear systems”, IEEE
Transactions on Fuzzy Systems, Vol. 9, No. 4,
2001.

SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 139-146, 2013 SAU J. Sci. Vol 17, No 1, p. 139-146, 2013
139
The fine structure levels for ground states of negative ions of nitrogen and
phosphorus
Leyla ÖZDEMİR1*, Nurgül ATİK1, Gülay GÜNDAY KONAN1
1Sakarya University, Department of Physics, 54187, Sakarya, Turkey
E mail: [email protected]
10.05.2012 Geliş/Received, 13.12.2012 Kabul/Accepted
ABSTRACT
The fine structure levels for negative ions (anions) of nitrogen and phosphorus have been investigated using
multiconfiguration Hartree-Fock method within the framework of Breit-Pauli Hamiltonian (MCHF+BP). Nitrogen
and phosphorus have half-filled outer shell in ground state 1s22s22p3 4S and 1s22s22p33s23p3 4S, respectively. It has
been stated in most works that the negative ion of nitrogen is instable whereas the negative ion of phosphorus is
stable. The results obtained have been compared with other works.
Key words: MCHF method, Breit-Pauli Hamiltonian, electron affinity, fine structure levels
Azot ve fosfor’un negatif iyonlarinin temel hallerinin ince yapi seviyeleri
ÖZET
Azot ve Fosfor’un negatif iyonları için ince yapı seviyeleri, Breit-Pauli Hamiltonyenini içeren çok konfigürasyonlu
Hartree-Fock yöntemi (MCHF+BP) kullanılarak incelendi. Azot ve fosfor temel halde (azot için 1s22s22p3 4S ve
fosfor için 1s22s22p33s23p3 4S) yarı dolu dış tabakaya sahiptirler. Çoğu çalışmalarda azotun negatif iyonunun kararsız
fosforun ise kararlı olduğu belirtilmektedir. Elde edilen sonuçlar diğer çalışmalarla karşılaştırılmaktadır.
Anahtar Kelimeler: MCHF yöntemi, Breit-Pauli Hamiltonyeni, elektron ilgisi, ince yapı seviyeleri
* Sorumlu Yazar / Corresponding Author

L. Özdemir, N. Atik, G. G. Konan The Fine Structure Levels For Ground States Of Negative İons
Of Nitrogen And Phosphorus
140 SAU J. Sci. Vol 17, No 1, p. 139-146, 2013
1. INTRODUCTION
Investigations for the level structures of negative ions
provide valuable insight into the fundamental problem
of many-body. Negative ions are ideal systems for
studies of electron correlation effects. Structural
differences between a negative ion and an atom or
positive ion originate from the nature of the force
binding extra electron due to the polarization and
exchange [1]. The electron affinity (EA) is often the
difference in the correlation energies of the atom and its
negative ion,
( ) ( )EA E neutral E anion (1)
Electron affinity has been regarded as one of the hardest
atomic or molecular property to produce an ab initio
quantum mechanical calculation.
The electron affinity of an atom is a measure of the
stability of the corresponding negative ion [1].
The data for half-filled subshell negative ions can be
found in NIST website [2]. Some of these works for the
negative nitrogen and negative phosphorus are given.
Binding energy and fine-structure splitting in atomic
negative nitrogen ion was reported by Hotop and
Lineberger [3]. Davidson et al [4] presented ground-
state correlation energy of nitrogen. A theoretical study
of N- ion of interest to accelerator mass spectrometry
was reported by Wijesundera and Litherland [5].
Atomic ionization potential and electron affinity with
relativistic and mass corrections of N- ion was
calculated by Koga et al [6]. Cowan et al [7] calculated
energy levels and lifetimes of negative nitrogen ion.
Gutsev et al [8] calculated electron affinity of nitrogen
with coupled-cluster method. The electron affinity of
nitrogen was reported with the density function theory
(DFT) by Chen et al [9]. Wijesundera and Parpia [10]
estimated the electron affinity of negative nitrogen
using the multi-configuration Dirac-Fock method.
Piangos and Nicolaides [11] presented very highly
excited bound states of N- ion. Biémont et al [12]
calculated ionization energy of N with the relativistic
multi-configuration Hartree-Fock method. Binding
energy and electron affinity of negative nitrogen was
presented by Andersen et al [13]. Klopper et al [14]
computed the ionization potentials and electron
affinities of the atoms H through Ne including N using
coupled-cluster method. The electron affinity of
phosphorus was performed with multireference single
and double excitation configuration interaction
calculations (MRSD-Cl) by Woon and Dunning [15].
Wang and Smith [16] reported the electron affinity of
phosphorus. Atomic ionization potential and electron
affinity with relativistic and mass corrections of P- ion
were calculated by Koga et al [6]. Gutsev et al [8]
computed the electron affinity of phosphorus using
coupled-cluster method. The electron affinity results of
phosphorus were reported using density function theory
(DFT) by Chen et al [9]. The electron affinity of
negative phosphorus ion was calculated using multi-
configuration Dirac-Fock method by Wijesundera and
Parpia [10]. Biémont et al [12] calculated the ionization
energy of phosphorus using relativistic multi-
configuration Hartree-Fock method. Binding energy and
electron affinity of negative phosphorus ion were
presented by Andersen et al [13]. Andersson et al [1]
measured the energies of fine structure components of
negative phosphorus ion using laser photodetachment
threshold spectroscopy. Peláez et al [17] studied the
electron affinity and an excited spectral term of
phosphorus with the photodetachment microscope.
In this work we have investigated the electron affinities
of nitrogen and phosphorus, and the fine structure of
negative ions of these atoms. It is known that the
negative ion of nitrogen is instable while the negative
ion of phosphorus is stable. Nitrogen and phosphorus
have half-filled outer shell in ground state (1s22s22p3
and 1s22s22p33s23p3, respectively). An extra electron is
bound to 2p and 3p subshell of nitrogen and
phosphorus, respectively, in their anions. The
calculations on electron affinities and fine structure of
ground state of negative ions of nitrogen and
phosphorus have been performed using
multiconfiguration Hartree-Fock (MCHF) method
developed by Fischer [18]. We have previously
investigated the electron affinities for nitrogen and
phosphorus. We have also considered correlation and
relativistic effects within the framework of the Breit-
Pauli approximation. For considering correlation effects
we have taken various configuration sets. A set of
orbitals (or active set) determines the set of all possible
configuration state functions (CSFs). The CSFs grow
rapidly with the number of electrons and with the size
of active set. For these reasons most MCHF expansions
are limited to restricted active space (RAS). In this work
we have taken the configurations according to single
and double excitations together (sd replacements).
2. CALCULATION METHOD
In the multiconfiguration Hartree-Fock (MCHF)
approximation [18], Hamiltonian is used for obtaining
the best radial functions for the set of non-relativistic
energies of the interacting terms. The wave function is
expressed as a linear combination of orthonormal
configuration state functions (CSFs) so that
, 2
1
1M
ii
c
. (2)
1
( ) ( )M
i ii
LS c LS

The Fine Structure Levels For Ground States Of Negative İons
Of Nitrogen And Phosphorus
L. Özdemir, N. Atik, G. G. Konan
SAU J. Sci. Vol 17, No 1, p. 139-146, 2013 141
In this expansion )( LSi , i , and ic represent
configuration state function in LS coupling,
configurations, and mixing coefficients of
configurations, respectively. Then the non-relativistic
energy expression becomes
1 1
( ) ( ) ( )M M
i j i j
i j
LS c c LS LS
H
M
j
ijji
M
i
Hcc11
M
i
M
ji
ijjiiii HccHc1
2 2 . (3)
If the interaction matrix ( )ijHH and a column
vector of the expansion coefficients (or mixing
coefficients) 1( ,..., )tMc cc , the energy of system is
tE c Hc (4)
The energy functional will depend on both P (the
column vector of radial functions) and c, since Hij
depends on the radial functions. A solution of the
MCHF problem requires simultaneously the solution of
the secular equation and variational radial equations.
Only if the secular problem is solved, it is called a
configuration interaction (CI) calculation. If any radial
function is optimized, it is called a multiconfiguration
Hartree-Fock calculation. Therefore it is taken into
account in the correlation effects.
The Breit-Pauli Hamiltonian includes relativistic effects.
This Hamiltonian can be written as
FSRSNRBP HHHH , (5)
where HNR is the non-relativistic many-electron
Hamiltonian, and HRS is the relativistic shift operator
including mass correction, one-and two-body Darwin
terms, spin-spin contact term and orbit-orbit term and is
given by
1 2RS MC D D OO SSCH H H H H H . (6)
Fine structure Hamiltonian HFS consists of the spin-
orbit, spin-other-orbit, and spin-spin terms,
FS SO SOO SSH H H H . (7)
The Breit-Pauli wavefunctions are obtained as a linear
combination of the form
1
( ) ( )M
i i i i
i
JM c L S JM
(8)
where ( )LSJM are LSJ coupled configuration
state functions (CSFs), that is,
( ) ( )L S
L S L S
M M
LSJM LM SM LSJM LM SM , (9)
and i denotes configurations; the orbital Li and the
spin Si angular momenta are coupled to give the total
angular momentum J. The mixing (or expansion)
coefficients ci are obtained by diagonalizing the Breit-
Pauli Hamiltonian. The radial functions building the
CSFs are taken from a previous non-relativistic MCHF
calculation and only the expansion coefficients are
optimized. The matrix eigenvalue problem becomes
Hc Ec, (10)
where H is the Hamiltonian matrix with elements
ij i i i BP j j jH L S JM H L S JM (11)
and t
Mccc ),...,( 1 is the column vector of the
expansion coefficients. The Breit-Pauli Hamiltonian is a
first-order perturbation correction to the non-relativistic
Hamiltonian.
3. RESULTS AND DISCUSSION
We have here studied the fine structure levels of ground
state of nitrogen and phosphorus anions (N- and P-)
using the MCHF atomic structure code [19] based on
multiconfiguration Hartree-Fock method within the
framework of Breit-Pauli Hamiltonian for relativistic
effects in addition to the correlation effects. It is noted
in [5] that the relativity must be included in theoretical
calculations, especially for negative ions. The electron
affinity of a neutral atom is the difference between the
binding energy of the neutral atom and the negative ion.
We have here reported the fine structure levels
including both correlation and relativistic effects.
Different calculations according to various
configuration sets have been presented in tables. The
excited states of negative nitrogen ion were studied by
Cowan et al [7] with different configuration set using
MCHF method. They also applied to the study of the
electron affinities of the 2p4 1D and 1S states of N-
relative to the 2p3 2D neutral nitrogen parent state. We
have here considered the state 2p4 3P for N- and 2p3 4S
for N; in similar 3p4 3P for P- and 3p3 4S for P.

L. Özdemir, N. Atik, G. G. Konan The Fine Structure Levels For Ground States Of Negative İons
Of Nitrogen And Phosphorus
142 SAU J. Sci. Vol 17, No 1, p. 139-146, 2013
In Table 1, the ground state energies (in au) for the
neutral nitrogen (N) and negative ion of nitrogen (N-),
and electron affinity (in eV) are reported. Energies have
been presented as nonrelativistic, EMCHF, and in addition
to Breit-Pauli relativistic effects, EMCHF+BP. The
superscripts A, B, C and D, and 1, 2, 3, 4 and 5
represent the calculations performed according to four
different configuration set for N and N-, respectively.
All of the configuration sets have been selected as
single (s) and double (d) excitations from subshells. We
have taken 2s, 2p, 3s, 3p, 3d in calculation A, +4s, 4p,
4d, 4f in calculation B, +5s, 5p, 5d, 5f in calculation C
as virtual orbitals. In calculation D the configurations
have been produced as active set approach. In this
calculation 2s, 2p, 3s, 3p, 3d virtual orbitals have been
selected. In the calculations on N, 1s2 have been fixed.
In same way 2s, 2p, 2d, 3s, 3p, 4p, 4f, in calculation 1;
active set approach in calculation 3 with same orbitals
in 1; 2s, 2p, 3p, 4p, 5p, 4f, 5f active set orbitals in
calculation 4; 2s, 2p, 3s, 3p, 3d, 4s, 4p, 4d, 4f virtual set
orbitals in calculation 5 have been selected for nitrogen
anion. In calculation 2 we have only taken the
excitations from 1s core. There are no more differences
between EMCHF and EMCHF+BP. For the atoms with lower
Z, it is known that the relativistic effects are not
essentially important. Although so, the electron affinity
values have been given according to different
configuration sets in last column include the correlation
and in addition to the relativistic corrections. In
literature the electron affinity values for nitrogen are
very scarce and generally negative. For this reason
negative ion of nitrogen has been determined as
instable. As seen Table 1, we also obtained some
negative values besides the positive ones in some
calculations. Good agreement has been obtained when
compared to the other works [3, 9, 20, 21].
Table 2 exhibits the ground state energy levels and
electron affinity values for phosphorus. Same
systematic calculations have been made for this atom
and its anion. The configurations have been performed
by the virtual sets 3s, 3p, 3d, 4s, 4p in calculation A;
+4d in calculation B; 2p, 3s, 3p, 3d in calculation C; 3s,
3p, 4s, 4p, 5s, 5p, 6s in calculation D for neutral
phosphorus. The 1s22s22p6 have been taken core in all
calculations except calculation C because of the
investigation core correlation. In same way, considering
1s22s22p6 as core (except calculation 3 and calculation
4), the virtual sets 3s, 3p, 3d, 4s, 4p in calculation 1,
+4f, 5s, 5p in calculation 2, 2p, 3s, 3p, 3d, 4s in
calculation 3, and +2p, 4p in calculation 4 have been
selected for phosphorus anion. In calculations 3 and 4
core is 1s22s2. The electron affinity values obtained
from different configuration sets for phosphorus show
good agreement according to nitrogen. In neutral
phosphorus and its anion the relativistic energies are
somewhat different according to the nitrogen and its
anion.
Table 3 shows the transition energies from fine structure
levels for negative ions of nitrogen and phosphorus. We
have only compared the fine structure levels of negative
ion of phosphorus. As stressed before, there are no data
on fine structure levels on negative ion of nitrogen. For
phosphorus, transition energies in the levels of ground
state show good agreement with other work [1, 13, 17,
24].

The Fine Structure Levels For Ground States Of Negative İons
Of Nitrogen And Phosphorus
L. Özdemir, N. Atik, G. G. Konan
SAU J. Sci. Vol 17, No 1, p. 139-146, 2013 143
Table 1. Ground state energies, EMCHF and EMCHF+BP (in au) of N and N- and electron affinity, EA (in eV). The total energies of the 1s22s22p3 4So 3/2
ground ( first lowest) state for N and the 1s22s22p4 3Pe 2 ground (first lowest) state for N- are taken.
N N- EA (eV)
EMCHF EMCHF+BP EMCHF EMCHF+BP MCHF MCHF+BP
-54.4496357A -54.4496373A -54.35642751 -54.35655141 -2.535A-1 -2.532A-1
-54.39580492 -54.39591472 -1.464A-2 -1.461A-2
-54.39410603 -54.39423003 -1.510A-3 -1.507A-3
-54.39406414 -54.39418824 -1.512A-4 -1.508A-4
-54.52127595 -54.52127595 1.949A-5 1.949A-5
-54.52007486 -54.52007486 1.916A-6 1.916A-6
-54.4856334B -54.4856343B -54.35642751 -54.35655141 -3.514B-1 -3.511B-1
-54.39580492 -54.39591472 -2.443B-2 -2.440B-2
-54.39410603 -54.39423003 -2.490B-3 -2.486B-3
-54.39406414 -54.39418824 -2.491B-4 -2.487B-4
-54.52127595 -54.52127595 0.969B-5 0.969B-5
-54.52007486 -54.52007486 0.937B-6 0.938B-6
-54.4851636C -54.4851647C -54.35642751 -54.35655141 -3.502C-1 -3.498C-1
-54.39580492 -54.39591472 -2.431C-2 -2.428C-2
-54.39410603 -54.39423003 -2.477C-3 -2.473C-3
-54.39406414 -54.39418824 -2.478C-4 -2.475C-4
-54.52127595 -54.52127595 0.982C-5 0.982C-5
-54.52007486 -54.52007486 0.950C-6 0.950C-6
-54.4248177D -54.4248186D -54.35642751 -54.35655141 -1.860D-1 -1.857D-1
-54.39580492 -54.39591472 -0.789D-2 -0.786D-2
-54.39410603 -54.39423003 -0.835D-3 -0.832D-3
-54.39406414 -54.39418824 -0.836D-4 -0.833D-4
-54.52127595 -54.52127595 2.624D-5 2.624D-5
Diğer Çalışmalar EA (eV) -0.067a; -0.27b; -0.07c; 0.05d
aChen et al [9]; bPekeris[20]; c Hotop and Lineberger [3]; dEdlén[21]

L. Özdemir, N. Atik, G. G. Konan The Fine Structure Levels For Ground States Of Negative İons
Of Nitrogen And Phosphorus
144 SAU J. Sci. Vol 17, No 1, p. 139-146, 2013
Table 2. Ground state energies, EMCHF and EMCHF+BP (in au) of P and P- and electron affinity, EA (in eV). The total energies of the 1s22s22p43s23p3
4So3/2 ground ( first lowest) state for P and the 1s22s22p43s23p4 3Pe 2 ground (first lowest) state for P- are taken.
P P- EA (eV)
EMCHF EMCHF+BP EMCHF EMCHF+BP MCHF MCHF+BP
-341.5953742A -341.5953742A -341.61627291 -341.61663511 0.568A-1 0.578A-1
-341.62089662 -341.62126912 0.694A-2 0.704A-2
-341.59171563 -341.59212543 -0.099A-3 -0.088A-3
-341.56066684 -341.56114494 -0.944A-4 -0.931A-4
-341.5947962B -341.5947962B -341.61627291 -341.61663511 0.584B-1 0.94B-1
-341.62089662 -341.62126912 0.710B-2 0.720B-2
-341.59171563 -341.59212543 -0.084B-3 -0,073B-3
-341.56066684 -341.56114494 -0.928B-4 -0.915B-4
-341.6052196C -341.6052196C -341.61627291 -341.61663511 0.301C-1 0.311C-1
-341.62089662 -341.62126912 0.426C-2 0.437C-2
-341.59171563 -341.59212543 -0.367C-3 -0.356C-3
-341.56066684 -341.56114494 -1.212C-4 -1.199C-4
-341.5729046D -341.5729229D -341.61627291 -341.61663511 1.180D-1 1.189D-1
-341.62089662 -341.62126912 1.305D-2 1.315D-2
-341.59171563 -341.59212543 0.512D-3 0.522D-3
-341.56066684 -341.56114494 -0.333D-4 -0.320D-4
Diğer Çalışmalar EA (eV)
0.748a; 0.7465b; 0.7468c; 0.7464d; 0.7465e; 0.7467f
aChen et al [9]; bHotop and Lineberger [3]; c Feldman [22] ; d Slater ve Lineberger [23]; e
Andersen et al [13]; f Andersson et al [1]
Table 3. The transition energies, E (meV), in fine structure levels for ground state of nitrogen anion (N-) and phosphorus anion (P-).
aOliveria et al[24]; bAndersson et al[1]; cPelaez et al[17]; dAndersen et al [13]
Term
N- P-
E This work E Other works E This work E Other works
3P0 − 3P1 2.931 − 9.711 12.29a
2.562 10.062 10.25b
2.933 11.023 10.29c
2.924 10.964 3P1 − 3P2 6.821 − 19.691 24.57a
6.032 20.242 22.48b
6.803 22.303 22.43c
6.814 25.054 22.40d
3P0 − 3P2 9.751 − 29.401 36.86a
8.592 30.302 32.73b
9.733 33.323 32.72c
9.734 36.014 32.60d

The Fine Structure Levels For Ground States Of Negative İons
Of Nitrogen And Phosphorus
L. Özdemir, N. Atik, G. G. Konan
SAU J. Sci. Vol 17, No 1, p. 139-146, 2013 145
4. CONCLUSION
In this work it is aimed to investigate the correlation and
relativistic effects on the behavior of electron affinities
of nitrogen and phosphorus. We also worked the ground
state fine structure levels of the nitrogen and
phosphorus anions. The ground state configuration of
neutral nitrogen is 2p3 half-filled shell and highest
multiplicity from this configuration is 4So. The ground
state of nitrogen anion is 2p4 and highest multiplicity
from this configuration is 3Pe. Generally the ground
state energy of N- ion in our calculations is larger than
that in N. The reason for this case can be explained as
larger the Coulomb repulsion between four outer
electrons in nitrogen anion (for example, in [5]). This
case is different in phosphorus which also occupies the
same column of Periodic Table. The electron affinity of
phosphorus is higher than that of nitrogen. The neutral
phosphorus has eight more electrons relative to the
nitrogen. It is supposed that three outer electrons (3p3)
reduced the screening effect due to the inner electrons.
And the effective additional attraction of electrons in
different orbits is well explained in [25]. The 2p shell in
neutral nitrogen unlike 3p shell in neutral phosphorus is
compact. In addition the transition energies in ground
state fine structure levels of N- ion are very small than
those in P-.
REFERENCES
[1] ANDERSSON, P., LINDAHL, A.O.,
ALFREDSSON, C., ROGSTRÖM, L., DIEHL, C.,
PEGG, D.J., HANSTORP, D., The electron affinity of
phosphorus, J. Phys. B: At. Mol. Opt. Phys., 40. 4097–
4107, 2007
[2]NIST(http://physics.nist.gov/PhysRefData/ASD/inde
x.html)
[3] HOTOP, H., LINEBERGER, W.C., Binding
energies in atomic negative ions, J. Phys. Chem. Ref.
Data, 4, 539–576, 1975
[4] DAVIDSON, E.R., HAGSTROM, S.A.,
CHAKRAVORTY, S.J., UMAR, V.M., FISCHER,
C.F., Ground-state correlation energies for two- to ten-
electron atomic ions, Phys. Rev. A, 44, 7071–7083,
1991
[5] WIJUSUNDERA, W.P., LITHERLAND, A.E., A
theoretical study of some negative ions of interest to
accelerator mass spectrometry, Nuclear Instruments and
Methods in Physics Research B, 123, 527-531,1997
[6] KOGA, T., AOKI, H., DE LA VEGA, G., J.M.,
TATEWAKI, H., Atomic ionization potentials and
electron affinities with relativistic and mass corrections,
Theor. Chem. Acc., 96, 248-255, 1997
[7] COWAN, R.D., FISCHER, C.F., HANSEN, J.E.,
KEMPTER V., Excited states of the negative nitrogen
ion: energies and lifetimes, J. Phys. B: At. Mol. Opt.
Phys. 30, 1457–1466, 1997
[8] GUTSEV, G.L., JENA, P., BARLETT, R.J., Electric
quadrupole moments and electron affinities of atoms
from H to Cl: a coupled-cluster study, Chemical Physics
Letters, 291, 547–552, 1998
[9] CHEN, G., ONG, P.P., TING,L., DFT approach for
electron affinity of negative atomic ions, Chemical
Physics Letters, 290, 211–215,1998
[10] WIJESUNDERA, W. P., PARPIA, F. A., Negative
ions of carbon, nitrogen, and phosphorus, Phys. Rev. A,
57, 3462–3468, 1998
[11] PIANGOS, N.A., NICOLAIDESY, C.A., Very
highly excited bound states of atomic negative ions
having all their electrons with unpaired spins, J. Phys.
B: At. Mol. Opt. Phys., 31, L147–L154, 1998
[12] BIÉMONT, E. , FRÉMAT, Y. , QUINET, P. ,
Ionization potentials of atoms and ions from lithium to
tin (Z=50), Atomic Data and Nuclear Data Tables, 71,
117–146 ,1999
[13] ANDERSEN, T., HAUGEN, H.K., HOTOP, H.,
Binding Energies in Atomic Negative Ions: III, J. Phys.
Chem. Ref. Data, 28, 1511-1533, 1999
[14] KLOPPER, W. , BACHORZ, R.A., Sub-meV
accuracy in first-principles computations of the
ionization potentials and electron affinities of the atoms
H to Ne, Physical Review A, 81, 022503, 2010
[15] WOON, D.E., DUNNING,JR, T.H., Calculation of
the Electron Affinities of the Second Row Atoms: Al–
Cl, J. Chem. Phys. 99, 3730–3737, 1993
[16] WANG, J., SMITH, JR,V.H., 1/Z Expansions for
isoelectronic systems from He through Ar, Phys. Rev.
A, 52, 1060–1066, 1995
[17] PELÁEZ, R.J., BLONDEL, C., VANDEVRAYE,
M., DRAG, C., DELSART, C., Photodetachment
microscopy to an excited spectral term and the electron
affinity of phosphorus, J. Phys. B: At. Mol. Opt. Phys.,
44, 195009, 2011
[18] FISCHER, C.F., BRAGE, T., JÖNSSON, P.,
Computational atomic structure-an MCHF approach,
(Bristol and Philadelphia), 1997
[19] FISCHER, C.F., The atomic structure package,
Comp.Phy. Commun., 128,635-636, 2000
[20] PEKERIS C.L., Ground state of two-electron
atoms, Phys. Rev., 112, 1649-1658, 1958
[21] EDLEN, B., Isoelectronic extrapolation of electron
affinities, J. Chem. Phys. 33, 98-105, 1960
[22] FELDMAN, D., Infrared photodetachment
thereshold measurements: Li- and P-, Z. Phys. A:
Hadrons and Nuclei, 277, 19-25, 1976
[23] SLATER , J., LINEBERGER, W.C., High-
resolution photodetachment studies of P- and Te-, Phys.
Rev. A, 15, 22772282, 1977
[24] OLIVERIA, DE G., MARTIN, J.M.L., PRAFT,
D.E. F., GEERLINGS, P., Electron affinities of the first
L. Özdemir, N. Atik, G. G. Konan The Fine Structure Levels For Ground States Of Negative İons
Of Nitrogen And Phosphorus
146 SAU J. Sci. Vol 17, No 1, p. 139-146, 2013
and second-row atoms: benchmark ab initio and
density-functional calculations, Phys., Rev. A, 60,
1034-1045, 1999
[25] LINDGREN, L., MORRISON, J., Atomic Many-
body Theory. (Springer-Verlag, Berlin), 1982

SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 147-153, 2013 SAU J. Sci. Vol 17, No 1, p. 147-153, 2013
147
Fonksiyonel özelliklere sahip probiyotik incir uyutması tatlısı üretimi
Meryem HUT1*, Ahmet AYAR1
1Sakarya Üniversitesi, Mühendislik Fakültesi, Gıda Mühendisliği Bölümü, Sakarya
E mail: [email protected]
20.01.2011 Geliş/Received, 29.01.2012 Kabul/Accepted
ÖZET
Bu çalışmada, yöresel bir süt tatlısı olan “İncir Uyutması” farklı probiyotik kültür kombinasyonları ve prebiyotik
olarak da inülin ilave edilerek üretilmiştir. Üretilen tatlılar 5ºC’ de 20 gün süreyle depolanmış, depolama esnasında
fiziksel, kimyasal ve mikrobiyolojik özelliklerinde meydana gelen değişiklikler belirlenmiştir. Mikrobiyolojik sayım
sonuçlarına göre kültür ilave edilen bütün tatlı örnekleri probiyotik özellik kazanmış ve bu özellikler depolama
süresince korunmuştur. Depolama süresince süt tatlılarının kurumadde, serum ayrılması ve viskozitesinde önemli bir
değişiklik olmazken, pH’sında ise önemli azalma meydana gelmiştir. Elde edilen sonuçlara göre; İncir uyutmasına
nitelik kazandırmak amacıyla kullanılan probiyotik kültürler, tatlıların fiziksel, kimyasal ve mikrobiyolojik
özelliklerini olumlu yönde etkilemiştir.
Anahtar Kelimeler: İncir uyutması, probiyotik, prebiyotik, reolojik özellik.
Production of probiotic “incir uyutması” dessert which has functional
properties
ABSTRACT
In this research, traditional dairy dessert “İncir Uyutması” was produced with different probiotic culture
combinations and adding inülin as prebiotic. Produced dessert samples were stored at 5°C for 20 days and
determined physical, chemical and microbiological changes during storage. All of the dairy dessert samples had
probiotic properties according to microbiological count results and those properties were preserved during storage.
During storage, while an important difference didn’t become in the dry matter, whey separation and viscosity,
important decrease occured in pH. According to the results in this research, probiotic cultures affected physical,
chemical and microbiological properties of desserts as positive.
Keywords: İncir uyutması, probiotic, prebiotic, rheological properties
* Sorumlu Yazar / Corresponding Author

M. Hut, A. Ayar Fonksiyonel Özelliklere Sahip Probiyotik İncir Uyutması
Tatlısı Üretimi
148 SAU J. Sci. Vol 17, No 1, p. 147-153, 2013
1. GİRİŞ
Türkiye’de değişik hammadde, katkı, proses ve
depolama koşulları uygulanarak üretilen pek çok tatlı
çeşidi bulunmaktadır. Bunlar arasında sütlü tatlılar en
önemli yeri tutmaktadır. Türk mutfağının zengin
çeşitlerinden olan sütlü tatlılar hamur ve şuruplu
tatlılara göre daha hafif, sindirimi kolay ve besin değeri
daha yüksek olan tatlılardır. Bunlar içerisinde dikkat
çeken ve henüz ticari olarak üretimi gerçekleştirilmeyen
tatlılardan biri de İncir uyutmasıdır. İncir uyutması,
Anadolu ve Orta Asya’daki Türkler tarafından üretilen
bir süt tatlısıdır. Bileşimini yoğunluklu olarak süt ve
incir oluşturmaktadır. [1].
İncir uyutmasının geleneksel üretiminde: İncir önce ince
dilimlere parçalanır, süt ise ayrı bir kapta kaynatılır,
parçalanan incirler yayvan bir kap içerisinde az bir
miktar kaynamış süt ile birlikte iyice ezilir, ezme
işleminin ortalarında isteğe bağlı olarak bir miktar şeker
ilave edilir. Şeker ve incirlerin süt içerisinde homojen
bir şekilde dağılmasını sağlamak için karıştırma
işlemine devam edilir. Sonra kalan süt ilave edilir ve
karışım yaklaşık 40 ºC’de 60 dk kadar bekletilir. Bu
süre sonunda kıvamlı bir yapı kazanmış olan süt tatlısı
buzdolabında soğumaya bırakılır. Yaklaşık 4-5 saatlik
soğumadan sonra İncir uyutması servis yapmaya hazır
hale gelir.
Bilindiği gibi, süt beslenme ve sağlık yönünden önemli
bir gıda maddesidir. Ancak, tek başına bir insanın tüm
besin ihtiyaçlarını karşılayabilecek yeterlilikte değildir.
İncir uyutmasına ilave edilen incirler sütün bu eksik
besin elementlerini tamamlayıcı rol oynamaktadır. Yani
İncir uyutması tatlısı süte göre daha besleyicidir.
Sağlıklı beslenmedeki yeri nedeniyle, doğal gıdaların
her geçen gün önem kazandığı günümüzde, besin değeri
yüksek olan kuru incirden değişik şekillerde
yararlanmak önemli bir husustur. Hele de incirin süt
gibi diğer bir değerli besin maddesi ile birlikte
değerlendirilmesi elde edilen ürünü çok daha
fonksiyonel hale getirmektedir.
Sağlıklı beslenme bilincinin giderek artması, bireylerin
fonksiyonel besinlere ve besin desteklerine yönelmesine
neden olmuştur. Fonksiyonel besinler içerisinde
probiyotikler ve prebiyotik önemli yer tutmaktadır.
Probiyotikler, endojen mikrofloranın özelliklerini
geliştirerek konakçı sağlığını olumlu yönde etkileyen
canlı mikroorganizmalardır. Probiyotik gıdalar da bu
mikroorganizmaları yeterli sayıda içeren besinlerdir.
Prebiyotikler ise mikroorganizma niteliğinde olmayan
ve probiyotik mikroorganizmaların gelişmesine destek
olan organik komponentlerdir. Genellikle
sindirilemeyen karbonhidrat türündeki ajanlar olan
prebiyotikler kalın bağırsakta bulunan bir veya sınırlı
sayıdaki bakterilerin gelişimini ve aktivitesini uyarmak
suretiyle sağlığı koruyucu ve hastalıkları önleyici etki
gösterirler. Probiyotik ve prebiyotiklerden elde edilen
gıdalar ise gün geçtikçe dünya fonksiyonel gıda
pazarındaki yerini sağlamlaştırmaktadır. [2,3].
Bu bilgiler ışığında, bu çalışmanın amacı; yüksek
besleyicilik özelliğine sahip yöresel bir süt tatlısı olan
İncir uyutmasının probiyotik bakteriler ilave edilerek
fonksiyonel bir gıda özelliği kazanmasını sağlamaktır.
Bu amaçla bu tatlıya değişik kombinasyonlarda
probiyotik kültürler ile bunların gelişmesini teşvik
edecek inülin ilave edilmiş ve bu kültürlerin tatlıdaki
gelişme durumu ile tatlıların bazı özellikleri üzerine
olan etkileri araştırılmıştır.
2. MATERYAL VE METOT
2.1. Materyal
“İncir uyutması” üretiminde, Adamenekşe Süt
İşletmesinden temin edilen çiğ inek sütü kullanılmıştır.
Kullanılan süt %3.79 yağ, %8.79 yağsız kurumadde,
kurumaddede %28.7 protein içermektedir. Yoğunluğu
ise 1.033 g/cm³’tür. Kuru incir Simbat Firmasından
temin edilmiş olup, kullanılan incirler 100 gr
kurumaddede; 4 gr protein, 55.3 gr şeker, 1.2 gr yağ, 6.7
gr diyet lifi, 138 mg kalsiyum 163 mg fosfor, 91.5 mg
magnezyum, 4.2 mg demir, 0.072 mg vitamin B1 ve
0.072 mg vitamin B2 içermektedir. Prebiyotik olarak
Orafti HPX Firmasından temin edilen inülin
kullanılmıştır. Kullanılan inulinin saflığı %99.5’tir.
Sütlü tatlı üretiminde kültür olarak kullanılan
Lactobacillus acidophilus Sakarya Üniversitesi
Mühendislik Fakültesi Gıda Mühendisliği Bölümü Gıda
mikrobiyoloji laboratuarından, Streptococcus
thermophilus- Lactobacillus lactis (Yo-mıxtmyogurt
cultures 204), S.thermophilus-Lactobacillus bulgaricus-
L. acidophilus-Bifidobacterium lactis (Yo-mıxtmyogurt
cultures 205) suşları Danisco firmasının İstanbul’da
bulunan yetkili distribütöründen temin edilmiştir.
2.2. Metot
2.2.1. İncir uyutması tatlısı üretimi
İncir uyutması üretimi için çiğ sütten 6 litre alınmış
başlangıçta 90 °C de 10 dk ısıl işleme tabi tutulmuştur.
İncirler ise iyice temizlenip ayıklanmış ve küçük
dilimlere parçalanmıştır. Sütün bir kısmı yayvan bir
tepsiye aktarılmış ve % 10 oranında olacak şekilde
tepsiye incir ilave edilmiştir. Ağaçtan yapılmış geniş bir
kaşık ile incirler süt içerinde iyice ezilmiştir. Daha sonra
da sütün kalanı tepsiye aktarılmış ve formülasyona
uygun oranlarda şeker ve inülin ilave edilip sütle
karıştırılmıştır. Probiyotik kültür veya kültür karışımları

Fonksiyonel Özelliklere Sahip Probiyotik İncir Uyutması
Tatlısı Üretimi
M. Hut, A. Ayar
SAU J. Sci. Vol 17, No 1, p. 147-153, 2013 149
ilave edildikten sonra örnekler alüminyum folyodan
yapılmış sup kaselere alınıp 40ºC’de 1 saat bekletilmiş,
oda koşullarında yarım saat dinlendirildikten sonra 5ºC’
deki buzdolabına konmuştur. Üretilen İncir uyutması
örneklerine ilave edilen probiyotik kültürler ve diğer
katkıların miktarları Tablo 1’de verilmiştir. Üretilen süt
tatlısı örnekleri 1, 10 ve 20 günlük 3 farklı depolama
aşamasında 2 tekerrürlü olarak fiziksel, kimyasal ve
mikrobiyolojik analizlere tabi tutulmuştur.
2.3. Fiziksel ve Kimyasal Analiz Metotları
2.3.1. Viskozite tayini
Tatlı örneklerinin viskoziteleri RVT Brookfield
Viscometer kullanılarak ölçülmüştür. Okumalarda 7
numaralı spindle kullanılmış, okuma işlemi 100 rpm’de
30. saniyelerde gerçekleştirilmiştir.
2.3.2. Serum ayrılması tayini
25 gram tatlı örneği alınarak 4±1 º C’de 2 saat süreyle
basit filtre kâğıdından süzülmüş ve elde edilen serum
miktarı volumetrik olarak ölçülmüştür. [4].
2.3.3. pH tayini
pH ölçümü dijital pH metre ile (Hanna Instruments pH
Meter 211 microprocessor pH meter)
gerçekleştirilmiştir. [5].
2.3.4. Kurumadde tayini
Tatlıların nemi, yaklaşık 1 g örnekte AND MX-50 nem
tayin cihazı kullanılarak ölçülmüştür. Aşağıdaki
formülle kurumadde hesaplanmıştır.
% Kurumadde miktarı = % 100 - % nem miktarı
(Cihazda okunan değer)
Tablo 1. İncir uyutması tatlısı üretiminde kullanılan deneme deseni
Örnek Probiyotik kültür
çeşidi Şeker İncir Prebiyotik
(inülin)
1 L.acidophilus 5 15 3 2 L.acidophilus 5 15 -
3 S. thermophilus L. lactis 5 15 3
4 S. thermophilus L. lactis 5 15 -
5 L. acidophilus S.thermophilus L. lactis
5 15 3
6 L. acidophilus S.thermophilus L. lactis
5 15 -
7
L. acidophilus B. lactis L.bulgaricus S.thermophilus
5 15 3
8
L.acidophilus B.lactis L.bulgaricus S.thermophilus
5 15 -
2.4. Mikrobiyolojik Analiz Metotları
2.4.1. Dilüsyon hazırlama
Seyreltme sıvısı olarak %0.85 NaCl ve % 0.1 pepton
içeren steril fizyolojik çözelti kullanılmıştır. Başlangıçta
örneklerden 10 g alınıp 90 ml’lik fizyolojik çözelti
içerisinde homojenize edilerek ilk dilüsyon (10–1) ve bu
dilüsyondan desimal seyreltmelerle diğer dilüsyonlar
hazırlanmıştır. Daha sonra uygun dilüsyonlardan ekim
gerçekleştirilmiştir. Sayım sonuçları dilüsyon faktörü ve
seyreltme sıvısı miktarı göz önünde tutularak
hesaplanmıştır.
2.4.2. Streptococcus thermophilus sayımı
S. thermophilus sayımında M 17 agar (Merck)
kullanılmıştır. M17 agar içerisine thermophilus için
seçicilik sağlayan laktozdan 1000 ml de 10 gr olacak
şekilde ilave edilmiştir. Dökme plak yöntemi
uygulanarak, uygun dilüsyonlardan 1’er ml çift petri
plağına ilave edilmiş ve rotasyon hareketi ile besiyeri ve
sıvı karıştırılmıştır. Petriler 40 ºC’ de 48 saat inkübe
edilmiş ve inkübasyon sonrası oluşan koloniler
sayılmıştır. [6, 7].
2.4.3. Lactobacillus acidophilus sayımı
L. acidophilus sayımında MRS agar (Merck)
kullanılmış ve hazırlanırken L.acidophilus için seçicilik
sağlayan her 1000 mL de 10 gr olacak şekilde glikoz
ilave edilmiştir. Dökme plak yöntemi uygulanarak,
uygun dilüsyonlardan 1’er ml çift petri plağına eklenmiş
ve rotasyon hareketi ile besiyeri ve sıvı karıştırılmıştır.
Petri plakları, Anaerocult A (Merck) ile birlikte
anaerobik jarlara (Merck) konularak oluşturulan
anaerobik ortamda 40 ºC’de 48 saat inkübe edilmiş ve
inkübasyon sonrası oluşan koloniler sayılmıştır.[8].
2.4.4. Lactobacillus bulgaricus sayımı
L. bulgaricus sayımı için 1.0 M HCl ile pH’sı 5.2’ye
ayarlanmış MRS-Agar (Merck, Germany)
kullanılmıştır. Dökme plak yöntemi uygulanarak, uygun
dilüsyonlardan 1’er ml çift petri plağına ilave edilmiş ve
rotasyon hareketi ile besiyeri ve sıvı karıştırılmıştır.
Besiyeri katılaştıktan sonra petri kutuları ters çevrilmiş,
40 ºC’ de 3 gün anaerobik inkübasyona tabi tutulmuştur.
Anaerobik inkübasyonu sağlamak için Anaerobentopf
(Merck, Germany) adı verilen 2.5 L’lik plastik
kavanozlar ve oksijeni uzaklaştırmak amacıyla da
AnaeroGen (Oxoid, England) adı verilen sistem
kullanılmıştır. İnkübasyondan sonra oluşan düzensiz
beyaz renkteki koloniler (30-300) sayılarak gramda
L.bulgaricus sayısı adet olarak saptanmıştır. İstatistiksel

M. Hut, A. Ayar Fonksiyonel Özelliklere Sahip Probiyotik İncir Uyutması
Tatlısı Üretimi
150 SAU J. Sci. Vol 17, No 1, p. 147-153, 2013
değerlendirmede sonuçlar logaritmik olarak
verilmiştir.[9].
2.4.5. Lactobacillus lactis sayımı
Bu sayımda M17 Agar hazırlanıp 121 ºC’de 15 dakika
sterilize edilmiş daha sonra dökme plak yöntemine göre
ekim yapılmıştır. Dökme plak yöntemi uygulanarak,
uygun dilüsyonlardan 1’er ml çift petri plağına ilave
edilmiş ve rotasyon hareketi ile besiyeri ve sıvı
karıştırılmıştır. Daha sonra karışım petri kapları ters
çevrilerek 40 ºC’ de 3 gün Anaerobentopf (Merck,
Germany) adı verilen 2.5 L’lik plastik kavanozlar ve
oksijeni uzaklaştırmak amacıyla da AnaeroGen (Oxoid,
England) adı verilen sistem kullanılarak anaerobik
inkübasyona bırakılmıştır. İnkübasyondan sonra oluşan
düzensiz sarımsı koloniler (30-300) sayılarak gramda L.
lactis sayısı adet olarak saptanmıştır. Değerlendirmede
sonuçlar logaritmik olarak verilmiştir.[10].
2.4.6. Bifidobacterium lactis sayımı
B. lactis sayımı için BSM-agar tartılıp saf suda
çözündürüldükten sonra 121 ºC’de 15 dakika sterilize
edilmiş ve 40 – 45 ºC’ye soğutulmuştur. Daha sonra bu
besiyerinden, önceden hazırlanarak homojen hale
getirilmiş dilüsyonların 1’er mL halinde inoküle edildiği
paralel steril petri kaplarına yaklaşık 15 - 20 mL
dökülmüş ve 37 ºC’de 3 gün Anaerobentopf 2.5 L’ lik
plastik kavanozlar ve oksijeni uzaklaştırmak amacıyla
da AnaeroGen sistem kullanılarak anaerobik
inkübasyona bırakıldıktan sonra, oluşan küçük kremsi
renkteki kolonilerin sayımı (30-300) yapılmıştır.
Değerlendirmede sonuçlar logaritmik olarak verilmiştir.
[8,11].
2.4.7. Maya ve küf sayımı
Süt tatlısı örneklerinde maya ve küf sayımı için Potato
Dextrose Agar besiyeri kullanılmıştır. pH'sı, steril
%10'luk tartarik asit ile 3.5'e ayarlanmış PDA
besiyerine yayma yöntemiyle ekim yapılmıştır. 22-25
°C de 4-5 günlük inkübasyondan sonra kolonileri
sayılmıştır. [12].
2.5. İstatistiksel Analiz Metotları
Araştırmada, probiyotik İncir uyutması üzerinde yapılan
fizikokimyasal ve mikrobiyolojik analiz sonuçlarına,
kullanılan probiyotik kültür farklılığının, prebiyotik
varlığının ve depolama süresinin etkilerini belirlemek
amacıyla varyans analizi (ANOVA) uygulanmıştır.
ANOVA sonucunda önemli çıkan veriler Duncan Çoklu
Karşılaştırma testine göre p<0.01 düzeyinde test edilmiş
ve uygulamalar arasındaki farklılıklar tespit edilmiştir.
3. SONUÇLAR VE TARTIŞMA
3.1. Süt Tatlılarının Fiziksel ve Kimyasal Özellikleri
Tatlı örneklerine ait bazı fiziksel ve kimyasal özellikler
ve bu özellikler üzerine kültür, prebiyotik ve depolama
süresinin etkisi sırasıyla Tablo 2, 3 ve 4’de verilmiştir.
Tablo 2. Kullanılan farklı kültürlerin süt tatlılarının bazı
fizikokimyasal özellikleri üzerine etkisi
Kültür
Kurumadde
(%)
pH
Serum
ayrılması
(ml/25
g)
Viskozite
(Poise)
L.acidophilus 27.92±2.60
a
5.92±0.14
c
2.12±0.37
b
3.78±0.39
a
S. thermophilus
L. lactis
27.13±2.29
a
6.15±0.07
a
2.75±0.39
a
2.58±0.23
c
L.acidophilus
S. thermophilus
L. lactis
27.50±1.87
a
6.11±0.03
b
2.50±0.63
a
2.59±1.41
c
L.acidophilus
B.lactis
L.bulgaricus
S.thermophilus
27.18±2.26
a
6.15±0.12
a
2.16±0.53
b
3.34±0.72
b
Farklı kültür kombinasyonlarının kullanılması süt
tatlılarının kurumadde miktarını etkilememiş (P>0.01),
pH, serum ayrılması ve viskozite değerlerinde ise
önemli değişikliklere sebep olmuştur (P<0.01). En
düşük pH’ya 5.92 ile L.acidophilus ilaveli tatlı örneği
sahip olurken en yüksek pH 6.15 ile S. thermophilus-L.
lactis ve L.acidophilus-B.lactis-L.bulgaricus-
S.thermophilus kültür kombinasyonu içeren süt tatlısı
örneklerinde belirlenmiştir. Serum ayrılması değerleri
acidophilus ilaveli yoğurtlarda daha düşük bulunmuştur.
Bu da serum ayrılmasının pH ile doğrudan ilişkili
olmadığını göstermektedir. Çünkü L.acidophilus ilaveli
örneklerde viskozite de diğer örneklere göre önemli
oranda daha yüksektir. Bunun L. acidophilus’un
tatlılarda gerçekleştirdiği metabolik olaylarla ilgili
olduğu söylenebilir. Yapılan bir araştırmada, yoğurtta
bulunan L. acidophilus exopolisakkarit salgılamış ve
depolama esnasında su salmaya olan eğilimin
azalmasıyla pıhtıda daha iyi bir tekstür sağlamış, S.
thermophilus ise böyle özellik göstermemiştir. [13].
İnülin ilavesi kurumadde miktarında önemli değişime
neden olmuştur (P<0.01). İnülinli süt tatlısı örneklerinde
kurumadde miktarı %28.66 iken inülinsiz örneklerde bu
değer %26.19’dur. pH, serum ayrılması ve viskozite
değerlerinde de inülin ilavesine bağlı olarak önemli
değişiklikler meydana gelmiştir (P<0.01). Viskozite ve
pH artarken serum ayrılmasında azalma meydana
gelmiştir. Meyvelerde bulunan pektinin şişerek
viskoziteyi arttırdığı bilinmektedir. [14]. Çalışmamızda
elde edilen sonuçlar bu görüşü destekler şekildedir. Süt
tatlısı üretiminde kullandığımız incir de içerdiği pektin
nedeniyle viskozite üzerine olumlu etkide bulunmuştur.
Yapılan bir çalışmada, inülinin dondurma örneklerinde
laktik asit bakterilerinin gelişimi üzerine etkisi

Fonksiyonel Özelliklere Sahip Probiyotik İncir Uyutması
Tatlısı Üretimi
M. Hut, A. Ayar
SAU J. Sci. Vol 17, No 1, p. 147-153, 2013 151
araştırılmış, bu çalışmada %3 inülin miktarının
viskoziteyi önemli ölçüde arttırdığı saptamıştır [15].
İnülinli süt tatlısı örneklerinde kurumadde miktarı
%28.66 iken inülinsiz örneklerde bu değer %26.19
olarak tespit edilmiştir.
Probiyotik süt tatlısı içerisindeki başta kuru incir olmak
üzere şeker ve inülin varlığı kurumadde oranının önemli
ölçüde artmasına neden olmuştur. Yapılan bir İncir
uyutması çalışmasında aynı oranda (%5) şeker ve incir
kullanılmış ve kurumadde değerlerinin %22.79-25.42
arasında değiştiği gözlenmiştir.[1]. Bizim çalışmamızda
elde edilen değerler daha yüksek olup bu farklılık da
kullanılan hammaddelerden ve inülinden
kaynaklanmaktadır. Bir diğer araştırmacı çalışmasında,
serum ayrılmasını muzlu probiyotik yoğurtlarda 3.45–
4.95 mL/25 g, sade probiyotik yoğurtta ise 5.27 ile 5.88
mL/25 g arasında tespit etmiştir.[16]. Kuşburnu
marmelatlı ve muzlu yoğurtlarda belirlenen değerlerin
bizim değerlerimizden daha yüksek olduğu
görülmektedir. Bunun sebebi süt tatlısı örneklerimizde
bulunan kuru incirin pektince zengin olması ve tatlıya
ilave edilen meyve oranının yüksek olmasıdır. Nitekim
bazı meyvelerin ilavesinin serum ayrılmasını azalttığı,
yüksek oranda starter kültür ilavesi ve yağsız süt
kullanımı gibi faktörlerin serum ayrılmasını
hızlandırabildiği bazı araştırıcılar tarafından
bildirilmektedir. [17, 18].
Tablo 3. İnülin ilavesinin süt tatlısının bazı fizikokimyasal özellikleri üzerine etkisi
Prebiyotik
Kurumadde
(%)
pH
Serum
ayrılması
(ml/25 gr)
Viskozite
(Poise)
İnülinsiz 26.19±2.08 b 6.05±0.15
b 2.66±0.40 b
2.53±0.97
b
İnülinli 28.66±1.59 a 6.11±0.11
a 2.10±0.53 a
3.62±0.50
a
Depolama süresince süt tatlılarının kurumadde, serum
ayrılması ve viskozitesinde önemli değişiklikler
meydana gelmezken (P>0.01), pH’da ise önemli azalma
meydana gelmiştir (P<0.01) (Tablo 4). Yani süt
tatlılarının depolama süresi ile kurumadde arasında
doğru; pH değerleri ve viskozite ile ters orantı vardır.
pH değerlerinin ortalama 1. gün ortalama 6.16; 10. gün
6.06 ve 20. gün 6.02 olduğu belirlenmiştir. Yani,
depolama süresi pH değerlerinde önemli bir azalmaya
sebep olmuştur (P<0.01). Bu azalma genel olarak
probiyotik kültürlerin laktozu laktik aside
dönüştürmelerinden kaynaklanmaktadır.
Tablo 4. Depolama süresinin süt tatlısının bazı fizikokimyasal
özellikleri üzerine etkisi
Depolama
süresi
Kurumadde
(%) Ph
Serum
ayrılması
(ml/25 gr)
Viskozite
(Poise)
1.Gün 27.00±2.30
a
6.16±0.08
a
2.31±0.51
a
3.09±0.99
a
10.Gün 27.53±1.54
a
6.06±0.14
b
2.46±0.59
a -
20.Gün 27.77±2.72
a
6.02±0.14
c
2.37±0.56
a
3.06±0.91
a
3.2. Süt tatlılarının mikrobiyolojik özellikleri
Tatlı örneklerine ait mikrobiyolojik özellikler üzerine
kültür, prebiyotik ilavesi ve depolama süresinin etkisi
sırasıyla Tablo 5,6 ve 7’de verilmiştir. Farklı kültür
kombinasyonları ilave edilen tatlılar incelendiğinde
L.acidophilus, L.lactis ve S. thermophilus’un birlikte
kullanıldığı tatlılarda acidophilus’un daha düşük sayıda
geliştiği görülmüştür. Farklı kültür
kombinasyonlarından oluşan örneklerde
L.acidophilus’un aktivitesi incelendiğinde canlılığını en
fazla L.acidophilus-B.lactis-L.bulgaricus-
S.thermophilus kültür kombinasyonunu içeren örnekte
sürdürdüğü saptanırken bunu sırasıyla L.acidophilus ve
L.acidophilus-S. thermophilus-L. lactis içeren örnekler
izlemiştir. L.acidophilus’un, B.lactis, L.bulgaricus,
S.thermophilus kültür kombinasyonu ile üretilen tatlıda
canlılığını en fazla koruması, kültür kombinasyonunda
yer alan B. lactis’in L. acidophilus’un gelişmesi üzerine
sinerjist etkide bulunması ile açıklanabilir.
S. thermophilus, L.lactis kombinasyonu ile oluşturulan
tatlı örneklerinde, S. thermophilus diğer bakterilere göre
ortama daha fazla uyum sağlamıştır ve probiyotik
bakteri sayısı daha fazladır. S. thermophilus, L.lactis’in
birlikte kullanıldıkları tatlı örneğinde en yüksek
probiyotik aktivite gözlenmiştir. Bu durum ortam
pH’sının S. thermophilus ve L.lactis’un optimum
gelişme pH’sına yakın olmasından kaynaklanmaktadır.
B.lactis ve L.bulgaricus birlikte kullanıldıkları tatlı
örneğinde benzer sayıda aktivite göstermişlerdir. Maya
ve küf sayısı acidophilus’un tek başına kullanıldığı
örnekte en yüksek olmuş, çoklu kombinasyon
uygulanan örnekte ise en düşük kalmıştır (Tablo 5).

M. Hut, A. Ayar Fonksiyonel Özelliklere Sahip Probiyotik İncir Uyutması
Tatlısı Üretimi
152 SAU J. Sci. Vol 17, No 1, p. 147-153, 2013
İnülin ilavesi S.thermophilus, B.lactis, L.bulgaricus ile
küf ve maya sayısında önemli değişikliğe sebep
olmamıştır (P>0.01). Ancak, L.acidophilus ve L.lactis
sayısında önemli oranda azalma görülmüştür (P<0.01).
Tablo 6. İnülin ilavesinin süt tatlılarının mikrobiyolojik özellikleri
üzerine etkisi (log kob/g)
Prebiyotik
L.acid
ophilu
s
S.ther
mophi
lus
L.lacti
s
B.lacti
s
L.bulg
aricus
Küf ve
Maya
İnülinsiz 6.73±0
.21 a
6.97±0
.31 a
7.03±0
.05 a
6.58±0
.19 a
6.69±0
.27 a
2.29±0
.84 a
İnülinli 6.66±0
.12 b
6.92±0
.28 a
6.94±0
.17 b
6.62±0
.08 a
6.73±0
.28 a
2.38±0
.80 a
İnülinin probiyotik dondurma üretimi üzerine etkisi ile
ilgili yapılan bir araştırmada. %1.5 ve %3 inülin
kullanılan dondurma örneklerindeki laktik asit
bakterilerinin sayısında önemli bir değişiklik tespit
edilmemiştir.[15]. Çalışmamızda probiyotik süt tatlısı
örneklerinde benzer sonuç elde edilmiştir (Tablo 6).
Tablo 7’de de görüldüğü gibi tatlıların depolama
süresine bağlı olarak tüm probiyotik bakteri türlerinde
önemli azalmalar meydana gelmiştir (P<0.01). Bu
azalma L.lactis ve L. bulgaricus’da daha düşük
olmuştur. Yapılan bir çalışmada yoğurt benzeri
fermente süt ürünlerinin üretiminde farklı kültür
kombinasyonları kullanılmış ve çalışmada ortalama L.
acidophilus sayılarının depolama esnasında 8.13 log
kob/g’dan 6.28 log kob/g’a azaldığı saptanmıştır.[19].
Depolama esnasında küf ve maya sayısında önemli artış
meydana gelmiştir (P<0.01). Küf ve maya sayısı, 1.gün
1.26 log kob/g, 10. gün 2.62 log kob/g iken en yüksek
küf maya sayısına 20. günde ulaşılmıştır.
Tablo 7. Depolama süresinin süt tatlısının mikrobiyolojik özellikleri
üzerine etkisi (log kob/g)
Depola
ma
süresi
L.acid
ophilus
S.ther
mophil
us
L.lactis B.lacti
s
L.bulg
aricus
Küf ve
Maya
1.gün 6.80±0.
22 a
7.27±0.
17 a
7.06±0.
05 a
6.77±0.
07 a
7.07±0.
04 a
1.26±0.
17 a
10.gün 6.69±0.
07 b
6.89±0.
23 b
7.00±0.
11 a
6.57±0.
06 b
6.55±0.
05 b
2.62±0.
20 b
20.gün 6.60±0.
15 c
6.68±0.
06 c
6.90±0.
17 b
6.47±0.
07 c
6.51±0.
02 b
3.13±0.
12 c
Üretilen süt tatlısı örneklerinde probiyotik
mikroorganizma sayısı probiyotik ürünler için sınır
değer olan 6 log kob/g’ın üzerinde bulunmuştur. Bu
yönüyle bütün tatlı örnekleri probiyotik özellik
taşımaktadır. Ürünlerdeki kültür kombinasyonuna bağlı
olarak probiyotik bakteri sayısı 6.55-7.03 log kob/g
arasında değişmiştir. İnülin ilavesi bakteri sayısında
önemli bir artışa sebep olmazken, depolama süresince
tatlı örneklerindeki bakteri sayısında önemli azalma
meydana gelmiştir.
4. SONUÇLAR
Üretilen tatlı örneklerinde probiyotik mikroorganizma
sayısı probiyotik ürünler için sınır değer olan 6 log
kob/g’ın üzerinde bulunmuştur. Bu yönüyle bütün tatlı
örnekleri probiyotik özellik taşımaktadır. İnülin ilavesi
probiyotik bakteri sayısında önemli bir artışa sebep
olmazken, depolama süresi tatlı örneklerindeki bakteri
sayısında önemli oranda azalmaya sebep olmuştur.
Depolama süresince süt tatlılarının kurumadde, serum
ayrılması ve viskozitesinde önemli bir değişiklik
olmazken, pH’sında ise önemli azalma meydana
gelmiştir. Elde edilen sonuçlara göre; incir uyutmasına
nitelik kazandırmak amacıyla kullanılan probiyotik
kültürler, tatlıların fiziksel, kimyasal ve mikrobiyolojik
özelliklerini olumlu yönde etkilemiştir.
Türkiye’de geleneksel olarak üretilen ve henüz ticari
üretime dahil olmamış pek çok fonksiyonel ürün
mevcuttur ve yöresel gıdalara ilgi sürekli artmaktadır.
Genel olarak bileşim bakımından zengin bir besin
içeriğine sahip olmanın yanında, farklı bir damak tadı
vermesi de ilgi çekici özellikleri arasında olan İncir
uyutması da bunlardan biridir. Çalışmamızda probiyotik
Tablo 5. Kullanılan farklı kültürlerin süt tatlılarının mikrobiyolojik özellikleri üzerine etkisi (log kob/g)
Kültür L.acidophilus S.thermophilus L.lactis B.lactis L.bulgaricus Küf ve Maya
L.acidophilus 6.76±0.06 a - - - - 2.34±0.86 a
S. thermophilus
L. lactis
-
6.98±0.3 a
7.03±0.06 a
-
-
2.45±0.76 ab
L.acidophilus
S. thermophilus
L. lactis
6.55±0.11 b
6.92±0.28 a
6.94±0.18 b
-
-
2.27±0.85 b
L.acidophilus
B.lactis
L.bulgaricus
S.thermophilus
6.78±0.22 a
6.93±0.31 a
-
6.60±0.14
6.71±0.26
2.26±0.86 b
Fonksiyonel Özelliklere Sahip Probiyotik İncir Uyutması
Tatlısı Üretimi
M. Hut, A. Ayar
SAU J. Sci. Vol 17, No 1, p. 147-153, 2013 153
kültür ilave edilerek üretilen İncir uyutması tatlıları
probiyotik özellik kazanmıştır. Bu özellik sayesinde
hem tatlıya fonksiyonel özellik kazandırılmış hem de
üründe çeşitlilik artmıştır. Yöresel bir ürüne böyle bir
özellik kazandırmak ürünün ticari olarak
değerlendirilmesinde de önemli rol oynayacaktır.
KAYNAKLAR
[1] AYAR, A., SERT, D., AKBULUT, M., Effect of
salep as a hydrocolloid on strorage stability of “İncir
uyutması” dessert. Food Hydrocolloids, 23, 62-71,
2008.
[2] ISOLAURI, E., Probiotics in human diseases. Am.
J. Clin. Nutr., 73 (Suppl):1142-1146, 2001.
[3] RENARD,A.C., Ultra-fresh yoghurt or dessert.
Reveu Laitiere Francaise, 555, 12-14, 1996.
[4] ATAMER, M., SEZGİN, E., Yoğurtlarda
kurumadde artımının pıhtının fiziksel özellikleri üzerine
etkisi. Gıda, 11 (6), 327–331,1986.
[5] DAVE, R.I.,SHAH, N.P., Viability of yoghurt and
probiotic bacteria in yoghurts made from commercial
starter cultures. Int. Dairy J., 7, 31–41, 1997.
[6] DAVE, R.I., SHAH, N.P., Evaluation of media for
selective enumeration of Streptococcus thermophilus,
Lactobacillus delbrueckii, ssp. bulgaricus,
Lactobacillus acidophilus and Bifidobacteria. J. Dairy
Sci., 79:1529-1536, 1996.
[7] DONKOR, O. N., HENRIKSSON, A.,
VASILJEVIC, T., SHAH, N. P., Effect of acidification
on the activity of probiotics in yoghurt during cold
storage. Int. Dairy J., 16:1181-1189, 2006.
[8] VINDEROLA, C.G., BAILO, N., REINHEIMER,
J.A., Culture media for the enumaration of
Bifidobacterium bifidum and Lactobacillus acidophilus
in the presence of yoghurt bacteria. Int. Dairy J., 9, 497–
505, 1999.
[9] THARMARAJ, N., SHAH, N. P., Selective
Enumeration of Lactobacillus delburueckii ssp.
vulgaricus, Streptococcus thermophilus, Lactobacillus
acidophilus, Bifidobacteria, Lactobacillus casei,
Lactobacillus rhamnosus and Propionibacteria. J. Dairy
Sci., 86:2288-2296, 2003.
[10] ZIMBRO, M. J., POWER, D. A., Difco & BBL
Manual. Manual of Microbiological Culture Media.
205-206, 2003.
[11] LAPIERRE, L., UNDELAND, P., COX, L. J.,
Lithium chloride-sodium propionate agar for the
enumeration of bifidobacteria in fermented dairy
products. J. Dairy Sci., 75:1192-1196, 1992.
[12] ÖZKAYA, D.F., KULEASAN, H., Maya ve Küf.
Gıda Mikrobiyolojisi ve Uygulamaları. Sim Matbaacılık
Ltd. Sti., 522 s., Ankara, 2000.
[13] HADDADIN, J.S.Y., Kinetic studies and sensory
analysis of lactic acid bacteria isolated from white
cheese made from sheep raw milk. Pak. J. Nutr., 4:78 -
84. 2005.
[14] YAYGIN, H., Yoğurt Teknolojisi. Akdeniz
Üniversitesi Basımevi, Antalya, 331s, 1999.
[15] BOUGHIDA, N., Effect of ınulin on the survival of
lactic acid and probiotic bacteria in ıcecream. university
of wisconsin, MS Food and Nutritional Sciences,
Master of Science Degree, Stout, 2011.
[16] KAVAZ, A., Ticari Probiyotik Kültür ile Üretilen
Muzlu Yoğurtların Depolama Süresince Çeşitli
Niteliklerinin İncelenmesi. Yüksek Lisans Tezi. Atatürk
Üniversitesi Fen Bilimleri Enstitüsü Gıda Mühendisliği
Anabilim Dalı, Erzurum, 2006.
[17] LUCEY, J.A., SINGH, H., Formation and
physical properties of acid milk gels: A Review. Food
Res. Int., 30 (7), 529-542, 1998.
[18] ÇELİK, Ş., BAKIRCI, İ., Some properties of
yoghurt produced by adding mulberry pekmez
(concentrated juice). Int. J. Dairy Tech., 56 (1), 26–29,
2003.
[19] YILMAZ, L., Yoğurt Benzeri Fermente Süt
Ürünleri Üretiminde Farklı Probiyotik Kültür
Kombinasyonlarının Kullanımı. Doktora Tezi, Uludağ
Üniversitesi, Fen Bilimleri Enstitüsü, Bursa, 2006.


SAÜ. Fen Bil. Der. 17. Cilt, 1. Sayı, s. 155-160, 2013 SAU J. Sci. Vol 17, No 1, p. 155-160, 2013
155
5 serbestlik dereceli robot kolunun modellenmesi ve kontrolü
Nurettin Gökhan ADAR1, Hüseyin ÖREN1, Recep KOZAN1*
1Sakarya Üniversitesi, Mühendislik Fakültesi, Makine Mühendisliği, Sakarya
03.04.2013 Geliş/Received, 04.04.2013 Kabul/Accepted
ÖZET
Bu çalışmada 5 serbestlik dereceli bir robot kolunun dinamik modellenmesi gerçekleştirilmiştir. Modellemesi
yapılacak robot kolu 3 uzuvlu her biri dönel 5 eklemli toplam 5 serbestlik derecesine sahip uzaysal bir koldur.
Dinamik modelleme için Lagrange-Euler denklemlerinden yardım alınarak hareket denklemleri çıkarılmıştır.
Çıkarılan bu denklemler matris-vektör formuna çevrilmiştir.
Elde edilen hareket denklemlerinin doğruluğunu görmek için uzuvların serbest düşme hareketi yapması sağlanarak
her bir eklemin konum grafikleri elde edilmiştir. Gerçekleştirilmesi istenen senaryoya karşılık gelen eklem
konumlarının elde edilebilmesi için bir kontrol algoritması tasarlanmıştır. Bu çalışmada PID tip kontrol algoritması
kullanılmıştır. Yapılan simülasyon çalışmaları sonucunda verilen kübik eklem konum yörüngelerinin gayet başarılı
bir şekilde takip edildiği görülmüştür.
Anahtar Kelimeler: Robot kolu, Dinamik denklemler, Yörünge, Konum kontrölü, PID kontrol
Modelling and control of 5 dof robotic arm
ABSTRACT
In this paper, dynamic modeling of a 5 DOF Robotic Arm was carried out. The Robotic Arm totally had 5 DOF
spatial articulated arm which consist of 3 parts. The modeling of dynamic equations of motion were based on
Lagrange-Euler equations. The equations were taked into matrix-vector form. The parts of Robotic Arm had been in
free fall to see the accuracy of the equations of motion and each joint graphs were obtained. A control algorithm was
designed to achieve the position of the joint corresponding to the desired scenario. PID control algorithm is used in
this study. As a result of the simulation of the orbits of the cubic joint position had been followed up successfully.
Keywords: Robotic arm, Dynamic Equations, Trajectory, Position Control, PID control
* Sorumlu Yazar / Corresponding Author

N. G. Adar, H. Ören, R. Kozan 5 Serbestlik Dereceli Robot Kolunun Modellenmesi Ve
Kontrolü
156 SAU J. Sci. Vol 17, No 1, p. 155-160, 2013
1. GİRİŞ
İnsansı robotlar ve bu robotlara ait uzuvların tasarımı,
imalatı ve kontrolü son yılların önemli araştırma
konularını oluşturmaktadır. İnsan için tehlike arz eden
yerlerde, zor koşullarda ve ağır görevleri yerine
getirebilmek için insan kol ve bacak yapısına benzer
yapıya sahip insansı kol ve bacak ile ilgili çalışmalar hız
kazanmıştır. Daha önceleri sanayide kullanılmak üzere
alt platformu sabit manipülatörler kullanılıyordu. Ancak
insan, bacakları sayesinde hareket edebilen ve kol-
eklem yapısı sayesinde birçok hareketi rahatlıkla yerine
getirebilen bir canlıdır. Sabit platformlu
manipülatörlerdeki bu kısıtları ortadan kaldırabilmek
için insansı robot tasarımları gerçekleştirmeye
başlanmıştır. Bu çalışmada alt platformu paletli üst
kısmı insan üst gövdesine benzer bir robot platforma ait
olan kolun dinamiği üzerine durulmuş olup kontrol
algoritması geliştirilmiştir.
Literatüre baktığımızda birçok başarılı insansı robot
tasarımı bulunmaktadır. Özelikle insan kol hareket
kabiliyetine yakın olduğundan dolayı 5 serbestlik ve 7
serbestlik dereceli insansı robot kol tasarımı üzerine
durulmuştur. Waseda Üniversitesi (Japonya) tarafından
Wabian insansı robotu ve Wendy mobil robotu tasarımı
gerçekleştirilmiştir. Arnold isimli Ruhr Üniversitesi
tarafından 1997 yılında tek kolla sahip mobil insansı
robot tasarımı gerçekleştirmiştir. 1999 yılında Hermes
isimli mobil robot platformu tasarlanmıştır. Michigan
Üniversitesi (ABD) tarafından 2002 yılında “DAV”
isimli gezgin insansı robot geliştirilmiştir. Bu robot
tasarım ve maliyet göz önünde tutularak tasarlanmıştır
[1]. İmalatı gerçekleştirilen bu robotun ana boyutları
750(l) x 750 (w) x 1700(h) (mm) şeklindedir. Robot
toplam 43 serbestlik derecesine sahiptir. Bunlardan 4
adedi gövdenin hareketini sağlayan tekerleklere, 2 adedi
gövdeye, 7 adedi kollara, 8 adedi ellere ve 8 adedi başa
aittir. Ayrıca robot birbirinden bağımsız çalışan 2 adet
kameraya sahiptir [1]. Wakayama Üniversitesi
(Japonya) tarafında 2002 yılında “Robovie” isimli
gezgin insansı robot geliştirilmiştir. Üst bedeni insana
benzeyen görüntüye sahip olan bu robot insanlarla
iletişim amacıyla tasarlanmıştır. İşitme, görme ve
dokunma gibi insana ait olan duyuların fonksiyonlarını
yerine getirmek için değişik algılayıcılara sahiptir [2].
Shenyang Üniversitesi (Çin) tarafından 2005 yılında
“YIREN” isimli gezgin insansı robot geliştirilmiştir [3].
Gezgin insansı robotun tekerlekleri karışık alanda tüm
yönlü hareketini sağlamak için tasarlanmıştır. Robot
toplam 23 serbestlik derecesine sahiptir. Bunlardan 3
adedi gövdenin hareketini sağlayan tekerleklere (2 adedi
sürücü teker, 1 adedi gezgin teker), 7 adedi kollara, 1
adedi el, 2 adedi bel ve 2 adedi boyun bölgesine aittir
[3]. 2000-2006 yılları arasında Forschungszentrum
Informatik Karlsruhe (Almanya) tarafından “ARMAR”
isimli 3 adet gezgin insansı robot geliştirilmiştir [4-5-6].
Bu çalışmada geniş çalışma uzayına sahip bir robot
kolunun tasarımı, analizi ve simülasyonu
gerçekleştirmektir. Dinamik analiz ve simülasyonlarını
gerçekleştirmek için Matlab/Simulink programından
yararlanılmıştır.
2. ROBOT KOLUNUN KİNEMATİĞİ
Bu çalışmada beş serbestlik dereceli insansı robot kolu
kinematik ve dinamik acıdan incelenmiştir. beş
serbestlik dereceli insansı robot kolu birçok değişik
tasarıma sahiplerdir. Bunlardan en çok kullanılanları
şekil-1‘de verilmiştir [7].
Şekil 1 Beş serbestlik dereceli kolun değişik tasarımları
Bu çalışmada şekil-1b’deki kol yapısı seçilmiştir.
Seçilen kol yapısına uygun olarak referans koordinat
sistemi ve her bir uzva ait referans sistemi şekil-2’de
gösterilmiştir. Hareket zenginliğini ve çalışma uzayını
artırmak için uzuvlara döner eklem yerleştirilmiştir.
Mekanizmanın eksen takımları aynı olacak şekilde
yerleştirilerek kinematik çözümü kolaylaştırılmıştır.
Şekil 2 Seçilen kol yapısı ve referans eksen takımı

5 Serbestlik Dereceli Robot Kolunun Modellenmesi Ve
Kontrolü
N. G. Adar, H. Ören, R. Kozan
SAU J. Sci. Vol 17, No 1, p. 155-160, 2013 157
Şekil-2 de gösterilen mekanizmada θ’lar (theta) her bir
eklemin açısal yer değiştirmesini göstermektedir.
İnsansı robot kolumuz beş serbestlik dereceli
olduğundan beş farklı θ açısı vardır. C_m’ler de
uzuvların ağırlık merkezini göstermektedir. Her bir
uzuv kare kesitli dikdörtgen prizma olarak seçilmiştir.
Robot kolunun referans koordinat sistemine göre i
eklemi ile i-1 eklemi arasındaki koordinat dönüşümü
homojen dönüşüm matrisleriyle temsil edilmiştir.
Homojen dönüşüm matrisi;
𝜏𝑖𝑖−1 = [
𝑐𝜃𝑖 −𝑐𝛼𝑖𝑠𝜃𝑖 𝑠𝛼𝑖𝑠𝜃𝑖 𝛼𝑖𝑐𝜃𝑖
𝑠𝜃𝑖 𝑐𝛼𝑖𝑐𝜃𝑖 −𝑠𝛼𝑖𝑐𝜃𝑖 𝛼𝑖𝑠𝜃𝑖
0 𝑠𝛼𝑖 𝑐𝛼𝑖 𝑑𝑖
0 0 0 1
] (1)
şeklinde tanımlanmıştır.
Robot kolunun uç noktasının yönelimi ve pozisyonu her
bir ilişkili eklemin homojen dönüşüm matrislerinin sıra
ile çarpımı sonucu elde edilir.
𝑇(𝜃) = ∏ 𝑇𝑖(𝜃𝑖)7𝑖=1 = [
�� �� �� ��0 0 0 1
] (2)
3. ROBOT KOLUNUN DİNAMİĞİ
Bir robot kolun dinamik modeli, robot kolun dinamik
davranışların belirleyen hareket denklemlerinden oluşur.
Bu denklemlerin bilgisayar yardım ile çözümü robot ve
robot kontrol tasarım açısından büyük kolaylık sağlar.
Robot kolunun dinamik analizi, eklemlere tahrik
elemanlar tarafından uygulanan moment veya kuvvet
büyüklükleri ile robot kolunun zamana göre konumu,
hız ve ivmesi arasındaki ilişkilerin incelenmesi
demektir. Böyle bir analiz için, robot kolun dinamik
davranışların tanımlayan lineer olmayan diferansiyel
denklem takımlarının elde edilmesi ve çözülmesi
gerekmektedir.
Robot kolunun dinamik denklemlerini elde etmek için
bilinen birçok metot vardır. Bunlar Lagrange-Euler (L-
E), Recursive Lagrange (R-L), Newton-Euler (N-E),
Genelleştirilmiş D'Alambert (G-D) prensibi gibi
yaklaşımlardır. Bu yöntemlerden en çok kullanılanlar L-
E ve N-E yaklaşımlarıdır [8]. Bu çalışmada robot kolun
dinamik modelinin çıkarılmasında, iyi planlanmış bir
yapıya sahip ve çıkarılması N-E yaklaşımındakinden
daha basit ve sistematik olan L-E yaklaşım ile elde
edilmiş denklemler kullanılmıştır [9].
𝐾𝑖 =1
2(𝑚𝑖𝜈𝐶𝑖
𝑇 𝜈𝐶𝑖+ i T
iCi
iIi
i ) (3)
𝐾 = ∑ 𝐾𝑖
𝑛𝑖 (4)
𝑈𝑖 = −𝑚𝑖0 Tg 0
CiP + 𝑈𝑟𝑒𝑓 (5)
𝑈 = ∑ 𝑈𝑖
𝑛𝑖 (6)
L=K-P (7)
şeklinde yazılır.
Burada
U=Robot kolunun toplam potansiyel enerjisi
K= Robot kolunun toplam kinetik enerjisi
L= Langrange fonksiyonu tanımlamaktadır.
sistemin tork/kuvvet ifadesini bulmak için
𝜏 =𝑑
𝑑𝑡(
𝜕𝐿
𝜕��) −
𝜕𝐿
𝜕𝜃 (8)
ifadesi kullanılır.
Robot kolunun dinamik davranışını analiz etmek için
kullanılan Euler-Lagrange denklemleri matris-vektör
formunda aşağıdaki şekilde yazılır.
𝜏 = 𝑀(𝜃)�� + 𝑉(𝜃, ��) + 𝐺(𝜃) (9)
𝜏 = 𝑀(𝜃)�� + 𝐵(𝜃)[����] + 𝐶(𝜃)[��2] + 𝐺(𝜃) (10)
Burada B coriolis matrisidir ve [nx n(n-1)/2]
boyutundadır. , hızların ortak vektörü olup boyutu [n(n-
1)/2x1] dir.
[����] = [��1��2 ��1��3 …… …… … . ��𝑛−1��𝑛]𝑇 (11)
C merkezkaç matrisidir ve [nxn] boyutundadır. , [nx1]
boyutunda vektördür.
[��12��2
2 …… . ��𝑛
2]𝑇 (12)
τ: Tork/kuvvet vektörü[n×1]
M: Kütle matrisi[n×n]
G:Ağırlık vektörü[n×1]
[ 𝜏1
𝜏2
𝜏3
𝜏4
𝜏5]
= 𝑀5×5.
[ 𝛼1
𝛼2
𝛼3
𝛼4
𝛼5]
+ 𝐵5×10.
[ ��1��2
��1��3
��1��4
��1��5
��2��3
��2��4
��2��5
��3��4
��3��5
��4��5]
+
[ ��1
2
��2
2
��3
2
��4
2
��5
2]
+ 𝐺5×1(13)

N. G. Adar, H. Ören, R. Kozan 5 Serbestlik Dereceli Robot Kolunun Modellenmesi Ve
Kontrolü
158 SAU J. Sci. Vol 17, No 1, p. 155-160, 2013
Modellenmesi yapılan robotik kolun teknik özellikleri
aşağıdaki Tablo 2’de verilmiştir.
Tablo 1 Kolun teknik özellikleri
uzuv 1.uzuv 2.uzuv 3.uzuv
Ağırlık[kg] 1.9625 6.86875 6.86875
Uzunluk[m] 0.1 0.35 0.35
Genişlik[m] 0.05 0.05 0.05
Yükseklik[m] 0.05 0.05 0.05
Euler-Lagrange denklemleri ile elde edilen dinamik
denklemlerin sağlamasını yapmak için her bir uzva
serbest düşme hareketi verilmiştir. Robot kolunun
dinamik denklemlerinin yazılması ve her bir eklemin
dinamik davranışını gözlemleyebilmek için
Matlab/Simulink programından yararlanılmıştır. Robot
kolunun Matlab/Simulink blok diyagramı şekil-3’de
gösterilmiştir.
Şekil 3 Matlab/Simulink blok diyagramı
Her bir eklemin serbest düşme hareketi sonucu elde
edilen eklem konum grafikleri aşağıda verilmiştir.
a) θ1 grafiği
b) θ2 grafiği
c) θ3 grafiği
d) θ4 grafiği
e) θ5 grafiği
Şekil 4 Serbest düşme hareketi sonucu elde edilen eklem konum
grafikleri
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-0.7
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
zaman[sn]
thet
a-1[
rad]
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 150
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
zaman[sn]
thet
a-2[
rad]
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
zaman[sn]
theta
-3[r
ad]
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
zaman[sn]
theta
-4[r
ad]
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15-0.4
-0.35
-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
zaman[sn]
theta
-5[r
ad]

5 Serbestlik Dereceli Robot Kolunun Modellenmesi Ve
Kontrolü
N. G. Adar, H. Ören, R. Kozan
SAU J. Sci. Vol 17, No 1, p. 155-160, 2013 159
4. ROBOT KOLUNUN KONTROLÜ
Robot kontrol probleminde amaç, robotun uç noktasının
verilen yörüngeyi en uygun şekilde izlemesini
sağlamaktır. Bunun için sistemin matematiksel olarak
ifadesi elde edilmeli ve sistem için uygun bir kontrolcü
dizayn edilmelidir. Bugünkü robot kolu kontrol
sistemlerinde genel yaklaşım, her bir kolun birbirinden
bağımsız servo mekanizmalar olarak düşünülmesi
üzerine yapılmaktadır [10]. Robot kollarının kontrolüyle
ilgili hız kontrolü, tork kontrolü gibi çeşitli yaklaşımlar
üzerinde çalışmalar yapılmaktadır.
Endüstriyel çevrelerde PID kontrolcü hala en çok
kullanılan geri beslemeli kontrolcüdür. Pratikte edinilen
tecrübeler bu kontrolcünün bir çok proses kontrol
problemi ile son derece iyi bir şekilde baş edebildiğini
göstermiştir. PID yönteminin diğer avantajları ise az
sayıdaki tasarım parametresinin olması ve bunların
performans ölçüleri ile kolayca ilişkilendirilebilmesidir.
Şekil 5 Yörünge planlama blok diyagramı
PID kontrolcü lineer bir kontrolcüdür. Hata sinyali e(t),
kontrol sinyali u(t)' ye çevirir. Lineer bir kontrolcü
olduğundan zaman ve frekans domenlerinde
incelenebilir. Zaman domeninde kontrol sinyali şu
şekildedir:
𝑢(𝑡) = 𝐾𝑝 ( 𝑒(𝑡) +1
𝑇𝑖∫𝑒(𝑡)𝑑𝑡 + 𝑇𝑑
𝑑
𝑑𝑡𝑒(𝑡)) (14)
PID kontrolde en önemli nokta kontrolcü katsayıları
olan orantı kazancını (Kp), integral zamanını (Ti) ve
türev zamanını (Td ) ayarlamaktır. Bunun için deneysel
ve teorik birçok yöntem geliştirilmiştir.
Robot kolunun kontrolü için herbir eklemi kontrol
edebilmek için PID kontrol kullanılmıştır. Elde edilen
matematiksel denklemler ile PID kontrolleri Matlab-
Simulink ortamına uygun şekilde aktarılmıştır (Şekil
10).
Şekil 6 PID kontrol blok diyagramı
Burada sitemin çıkışları her bir eklemin açısal yer
değiştirmesi θ1, θ2, θ3, θ4, θ5 ve sistem girişi bu
eklemlere uygulanması gereken moment değeridir.
Robot kolunun her bir ekleminin açısal yer değiştirmesi
için 3. mertebe polinomlardan yararlanılmış ve her bir
eklem yörüngesi aşağıda verilmiştir.
𝜃(𝑡) = 𝑎 + 𝑏 𝑡 + 𝑐 𝑡2 + 𝑑 𝑡3 (15)
Kullanılan her bir eklem yörünge katsayıları aşağıdaki
başlangıç ve bitiş şartları kullanılarak hesaplanmıştır.
θ1 0 π
2
θ2 0 π
4
θ3 0 π
3
θ4 0 π
2
θ5 0 π
6
Hesapla bulunan katsayılar aşağıdaki şekildedir.
θ1 a=0, b=0, c=0.0209, d=-9.3084x10-4
θ2 a=0, b=0, c=0.0105, d=-4.6542x10-4 θ3 a=0, b=0, c=0.0140, d=-6.2056x10-4 θ4 a=0, b=0, c=0.0209, d=-9.3084x10-4 θ5 a=0, b=0, c=0.0070, d=-3.1028x10-4
Her bir eklemin PID kontrolü sonucu elde edilen eklem
yörüngesi referans ve gerçekleştrilen değer grafikleri
aşağıda verilmiştir.
a) θ1 grafiği
0 5 10 150
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
zaman [sn]
teta
2 [
rad]

N. G. Adar, H. Ören, R. Kozan 5 Serbestlik Dereceli Robot Kolunun Modellenmesi Ve
Kontrolü
160 SAU J. Sci. Vol 17, No 1, p. 155-160, 2013
b) θ2 grafiği
c) θ3 grafiği
d) θ4 grafiği
e) θ5 grafiği
Şekil 7 Eklem konum referansları ve kontrol sonucu gerçekleştirilen
değerleri
5. SONUÇ
Bu çalışmada beş eklemli bir robot kolunun
eklemlerinin PID algoritması ile konum kontrolü
gerçekleştirilmiştir. Bu amaçla her bir eklem için farklı
senaryolar hazırlanmıştır. 15 saniyelik bir çalışma süresi
içerisinde her bir eklemin konum yörüngelerinin
gerçekleştirilmesi istenmiştir. Şekil-7’den de görüldüğü
gibi başlangıçtaki küçük bir salınımdan sonra eklem
konum yörüngelerinin gayet kapalı bir şekilde takip
edildiği anlaşılmaktadır. Klasik bir kontrol algoritması
olan PID ile kontrol işlemi başarılı bir şekilde
gerçekleştirilmektedir.
KAYNAKLAR
[1] Han J.D., Zeng S.Q., Tham K.Y., Badgero M.,
Weng J.Y., Dav: A Humanoid Robot Platform for
Autonomous Mental Development, ICDL, 2002.
[2] Kanda T., Ishiguro H., Ono T., Imai M., Nakatsu R.,
Development and Evaluation of an Interactive
Humanoid Robot “Robovie”, IEEE International
Conference on Robotics Automation, 2002.
[3] Tiejun Z., Dalong T., Mingyang Z., The
Development of a Mobile Humanoid Robot with
Varying Joint Stiffness Waist, IEEE International
Conference on Robotics Automation , 2005.
[4] Asfour T., Berns K., Dillmann R., The Humanoid
Robot ARMAR Design and Control, IEEE, 2000.
[5] Ly D.N., Regenstein K., Asfour T., Dillmann R., A
Modular and Distributed Embedded Control
Architecture for Humanoid Robots, IEEE International
Conference on Robotics Automation, 2004.
[6] Albers A., Brudniok S., Ottnad J., Sauter C.,
Sedchaicharn K., Armar III – Design of the uper body.
[7] Zhao T., Yuan J., Zhao M., Tan D., Research on the
Kinematics and Dynamics of a 7-DOF Arm of
Humanoid Robot, International Conference on Robotics
and Biomimetics, 2006.
[8] Eğrisöğüt A., Kozan R., Scara Robot Dinamiğinin
Yapay Sinir Ağları Kullanılarak Modellenmesi,
Mühendis ve Makina Dergisi, cilt 46, Sayı 550.
[9] John J. Craig, Introduction to Robotics Mechanics
and Control, 2004
[10] Fu, K.S., González, R.C.; Lee, C.S.G., Robótica:
Control, detección, visión e inteligencia", Ed. McGraw-
Hill, Madrid, 1998.
0 5 10 150
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
zaman [sn]
teta
2 [
rad]
0 5 10 15-0.2
0
0.2
0.4
0.6
0.8
1
1.2
zaman [sn]
teta
3 [
rad]
0 5 10 15-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
zaman [sn]
teta
4 [
rad]
0 5 10 15-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
zaman [sn]
teta
5 [
rad]