september 2004 slide 1 of 49 dr. ir. w. jongkind ae4-s02 spacecraft mechatronics displacement...
Post on 21-Dec-2015
222 views
TRANSCRIPT

September 2004slide 1 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
AE4-S02 Spacecraft MechatronicsDisplacement Sensors
Dr. ir. W. Jongkind
TU-Delft2004 – 2005

September 2004slide 2 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Introduction (1)
Potentiometers. Linear as well as rotary potentiometer are applied.
– Potentiometers are used in situations where accuracy is not of major importance,
– Accuracies may vary from 0.3 % to 5 %. – Device is normally cheap.
Incremental Encoders.Linear and rotary incremental encoders are applied.
– Rather inexpensive devices.– The performance depends on the resolution of the encoder slit pattern. – They can can be very accurate indeed.

September 2004slide 3 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Introduction (2)
Absolute Encoders. Again linear and rotary absolute encoders exist
– The code pattern is in the majority of cases a Gray code pattern, binary code patterns are much less common
Electrical Transformers– For very accurate linear displacement measurements often Linear
Variable Differential Transformers (LVDT)are applied– The rotary displacement can be accurately measured with rotary electrical
transformer devices such as the Resolver or Synchro

September 2004slide 4 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Making the Right Choice
The following requirements and constraint should be addressed:
– Required resolution– Required accuracy– Environmental constraints– Integration aspects– Availability
The selected displacement sensor is the most important factor and deciding for overall performance of a system especially when the device forms part of a feedback loop

September 2004slide 5 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Potentiometer (1)
Operating range from 1 mm to 1m
xKxL
VV pout

September 2004slide 6 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Potentiometer (2)
pout KV
V max2
2

September 2004slide 7 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Encoders
Typically used as shaft angle encoders
The device output is in digital form– Digital output needs in general to be transformed with the aid of a
computing device to obtain magnitude and direction of movement as well as position or angle information
Consist of a pattern impressed upon a part of the system that characterizes the motion
Two main classes of optical encoders:– Absolute encoders and– Incremental encoders– For velocity measurement nearly always incremental encoders are
applied

September 2004slide 8 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Incremental Encoder

September 2004slide 9 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Readout System

September 2004slide 10 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Sense of Rotation

September 2004slide 11 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Linear Encoder Codes

September 2004slide 12 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Circular Encoder Codes

September 2004slide 13 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Gray Encoder Output

September 2004slide 14 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Encoder Construction

September 2004slide 15 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Incremental Encoder Construction

September 2004slide 16 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Gray EncoderConstruction

September 2004slide 18 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Transformer Based Displacement Sensors
Linear Variable Differential Transformer
Synchro’s and Resolvers

September 2004slide 19 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Linear Variable Differential Transformer

September 2004slide 20 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Coil Voltages

September 2004slide 21 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Coils in Series Opposition

September 2004slide 22 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
LVDT Animation

September 2004slide 23 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Coil Voltages

September 2004slide 24 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Amplitude versus Displacement

September 2004slide 25 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Output of an LVDT
Starting at the primary or excitation side of the LVDT:
kernel. theofnt displacemeith linearly w changes quantity The
)(
:are coilssecondary at the voltagesinduced The
21
2121
22
11
-MMdt
diMMvv
dt
diMv
dt
diMv
dt
diLRi v
pss
ps
ps
ppppp

September 2004slide 26 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Signal conditioning Scheme

September 2004slide 27 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Signal Conditioning of a LVDT (1)
Location of the displacement transducer coil– consider the phase of the output– as well as the magnitude
The output phase of the position sensor is compared with the excitation phase and it can be:
– In or out of phase with the excitation, depending upon which half of the coil the center of the armature is in

September 2004slide 28 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Signal Conditioning of a LVDT (2)
This type of signal conditioning systems is available in IC form.
The Analog Devices type AD 598 IC uses this technique.
21
210
ss
ss
vv
vvAv

September 2004slide 29 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Principle of a Resolver

September 2004slide 30 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Resolver Operation Principle (1)
The rotor of the resolver is exited by an AC reference voltage of 400 Hz typically
As the rotor turns and the stator remains static an angular difference in orientation between rotor and stator develops:
– va=Kvexitesinωt sinθ– vb=Kvexitesinωt cosθ
The shaft angle θ is obtained by first multiplying the original output signals by cosφ and sinφ respectively

September 2004slide 31 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
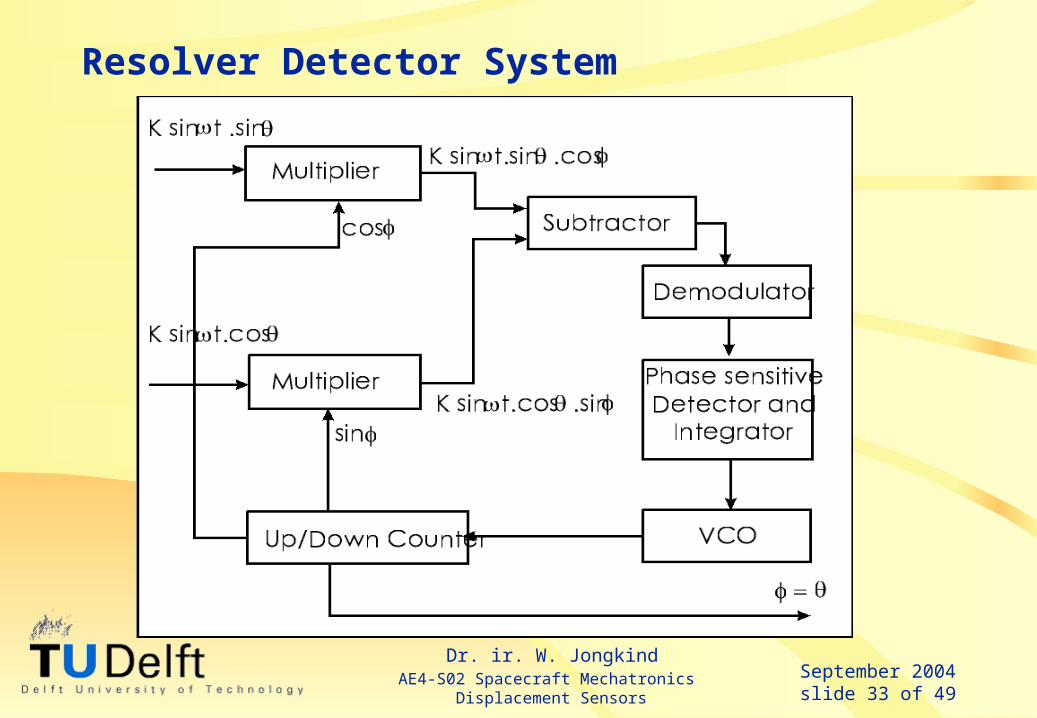
Resolver Detector System

September 2004slide 32 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Resolver Operation Principle (2)
Kvsinωt sinθ cosφ and Kvsinωt cosθ cosφ
Subtracting gives: Kvsinωt sin(θ-φ)
(θ-φ) is the angular error
Demodulated gives: A sin(θ-φ)
Signal to a phase sensitive detector followed by an integrator and a Voltage Controlled Oscillator (VCO)
Detection of angle θ is based on nulling the error angle (θ-φ)
September 2004slide 33 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
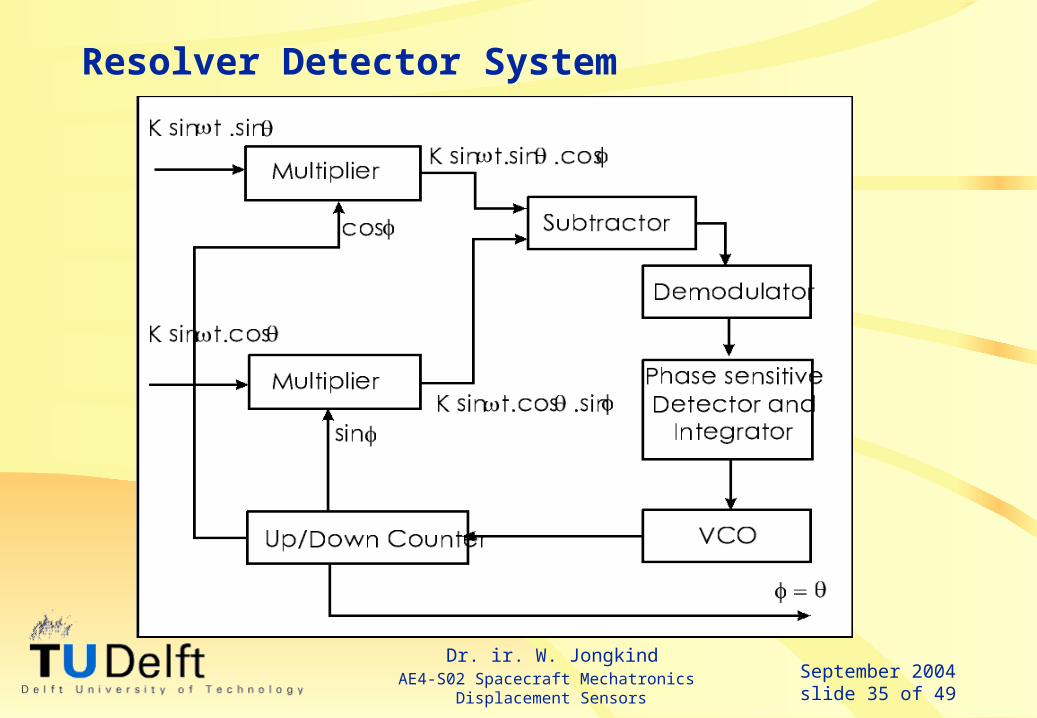
Resolver Detector System

September 2004slide 34 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Resolver Operation Principle (3)
The VCO controls an up/down counter containing the digital equivalent of angle θ
The whole manipulation is performed in closed loop fashion
Since the difference between θ and φ is nulled, the up/down counter supplies θ
In practice all calculations are performed on--chip such as the AD2S90 from Analog Devices
September 2004slide 35 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Resolver Detector System

September 2004slide 36 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Excitation and Read-Out Chipset

September 2004slide 37 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Principle of a Synchro

September 2004slide 38 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Application of Displacement Sensors (1)
Application of LVDT's– On SOHO the LASCO experiment is flown– The device requires very accurate positioning measurement. This
accurate position measurement is obtained by applying LVDT's– The LVDT's were able to measure with a resolution of 0.01 μm over a
range of 30 m
An other experiment on board of SOHO, the SUMER EUV Spectrometer also applies a LVDT for linear position measurement. This sensor has a resolution of 12 bits

September 2004slide 39 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
LASCO

September 2004slide 40 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
SOHO-LASCO Experiment

September 2004slide 41 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
SOHO-LASCO Experiment

September 2004slide 42 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
SOHO LASCO LVDT Characteristics
Stroke in micrometers

September 2004slide 43 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Application of Displacement Sensors (2)
Application of Resistive Encoders– The CAPS instrument on the Cassini spacecraft is equipped with a resistive
encoder to measure the angular position of the instrument

September 2004slide 44 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Application of Displacement Sensors (3)
Application of Optical Encoders:– In the pointing and scanning mechanism for ATLID and SPOT5 an optical
encoder is applied to obtained angular position. The resolution is 21 bits, its static accuracy is 15 μ rad and its bandwidth is a few hundred Hz
– For angular position measurement of a tether reel use of an incremental encoder generates 4000 pulses per revolution on two channels in quadrature.
– In the scan mechanism for the Master Limb Sounding Instrument it is proposed to measure the angle of the elevation axis with an incremental encoder

September 2004slide 45 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Application of Displacement Sensors (4)
– Scanning mechanism of the MIPAS Interferometer on board ENVISAT an incremental encoder is used. The outer diameter of the encoder is 182 mm containing 18000 equally spaced lines. The accuracy is 1 arcsec
– An 21 bits optical encoder is applied in a pointing mechanism for a Earth Observation Satellite. The resolution is 3 μrad, precision over a range of 3600 is better than 15 μrad
– The scan mechanism of the Atmospheric Lidar Instrument makes use of an encoder
– In the scanning mechanism for SPOT5 a high resolution pointing and scanning mechanism was required. The encoder applied had 21 bit resolution

September 2004slide 46 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Encoder

September 2004slide 47 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Application of Displacement Sensors (5)
Resolver Applications– The Infrared Atmospheric Sounder Interferometer contains the IASI
instrument. Part of the instrument is a scan sub-system for a mirror. The shaft angle is measured by a Resolver
– The resolver assembly accuracy is 10-4 rad– The Global Ozone Scan Monitoring Experiment also contains a resolver
– Accuracy is 10 arcsec– European Robotic Arm (ERA) is equipped with a 6040 Rotasyn

September 2004slide 48 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Resolver

September 2004slide 49 of 49
Dr. ir. W. JongkindAE4-S02 Spacecraft Mechatronics
Displacement Sensors
Rotasyn Resolver