simetrije i algebra impulsa.ppt
TRANSCRIPT

Nuklearna fizika - vježbe -
1. Simetrije

Rotacije
u trodimenzionalnom euklidskom prostoru, rotacija se opisuje realnom, ortogonalnom matricom dimenzije 3x3:
rr
R' eksplicitan matrični zapis, u granici malih kutova:
10
02
1
02
1
100
0cossin
0sincos
)(
0
2
2
zR
Sakurai

Rotacije
21
210
001
cossin0
sincos0
001
)(2
2
0
xR
210
010
02
1
cos0sin
010
sin0cos
)(2
2
yR

Rotacije
2
22
2
1
21
02
1
)()(
yx RR
trivijalno se pokazuje:
2
2
22
1
210
21
)()(
xy RR
rotacije oko različitih osi ne komutiraju ako ne zanemarimo članove s drugom ili višim potencijama u :
000
00
00
)()()()( 2
2
xyyx RRRR

Rotacije
”1” se može zapisati kao rotacija oko bilo koje osi za 0o
(takav zapis će nam trebati kasnije za povlačenje analogije s algebrom momenta impulsa):
1)()()()()( 2 zxyyx RRRRR
dakle:
)0()()()()()( 2anyzxyyx RRRRRR

Rotacije u kvantnoj mehanici rotaciji, opisanoj matricom R, u kvantnoj mehanici se
pridružuje operator D(R), tako da vrijedi:
)(RDR
R
... stanje prije rotacije... stanje poslije rotacije
R – matrica, D(R) – operator koji se može reprezentirati matricom
dimenzija te matrice ovisi o dimenziji N prostora stanja |>
N=2 (spin=1/2) D(R) se opisuje matricom 2x2
N=3 (spin=1) D(R) se opisuje matricom 3x3
...

Rotacije u kvantnoj mehaniciOdređivanje matrice operatora D(R):
1) infinitezimalni operator može se u QM napisati kao:
gdje je G hermitski operator, a infinitezimalni pomak
2) za translaciju: G px/ħ, dx,
za pomak u vremenu: G H/ħ, dt,
za rotaciju: G Jz/ħ, d.
3) dakle:
4) konačna rotacija:
iGU 1
didzD zJ1),(
ZiJNz
NeizD N
J
1lim),(
(Jz-općenit operator momenta impulsa)

Rotacije u kvantnoj mehanici dakle, svakoj rotaciji (opisanoj matricom R) u kvantnoj
mehanici se pridružuje operator D(R) koji ima ista grupna svojstva kao R
budući da vrijedi: 1)()()()()( 2 zxyyx RRRRR
za D(R) dobiva se (zanemarivanjem članova manjih od 2):
1111112
2
22
2
22
2
22
2
22
2222
zxxyyyyxx JJJJJJJJJiiiii
2
2
2
2
22
2
22
2
2
2
22
2
22
222211
zxyxyxyyxyxyx JJJJJJJJJJJJJiiiii
zxyyx JiJJJJ
zyx JiJJ ],[d

Rotacije u kvantnoj mehanici
kijkji JiJJ ],[
jednakak j,i, indeksa 2 koja bilo za
kj,i,u permutacijneparnu za
kj,i,u permutacijparnu za
0
1
1
...
...
...
ijk
Jk-općenit operator momenta impulsa, generator rotacije oko k-te osi
nije definiran kao r × p !
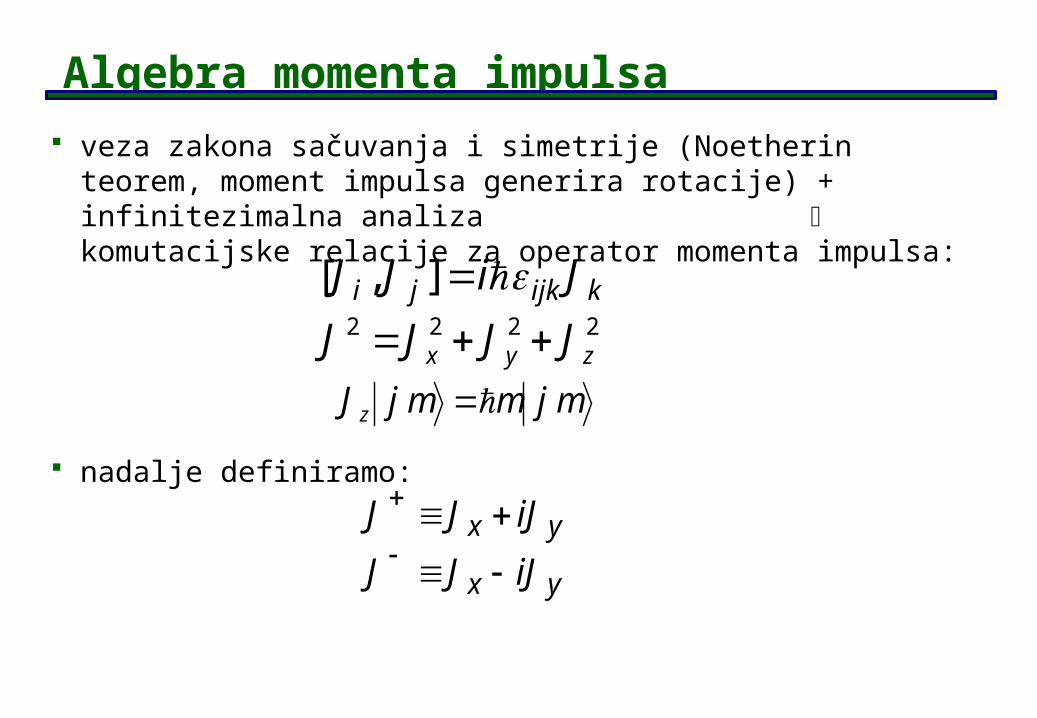
Algebra momenta impulsa veza zakona sačuvanja i simetrije (Noetherin teorem,
moment impulsa generira rotacije) + infinitezimalna analiza komutacijske relacije za operator momenta impulsa:
kijkji JiJJ ],[2222zyx JJJJ
mjmmjJ z
nadalje definiramo:
yx iJJJ
yx iJJJ
0,
)()()(,
,,,,,
,,,
,,,,
2
2
2
2222
x
yzzyzyyzx
zxzzzxyxyyyxx
zxyxxxx
JJ
JiJJJiJiJJJiJJ
JJJJJJJJJJJJJJ
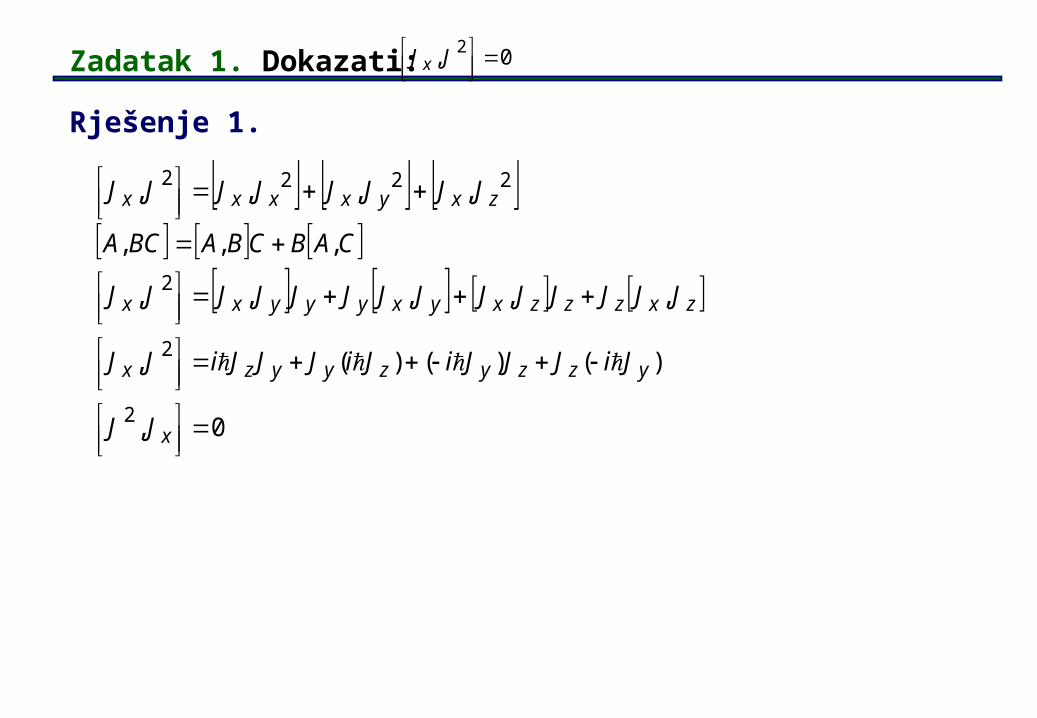
CABCBABCA
JJJJJJJJ
Zadatak 1. Dokazati: 0, 2
JJ x
Rješenje 1.

Zadatak 2. Pokazati da je J- operator poništavanja!
Rješenje 2.
1
1)1(1
)1(
))(1(
)]()[(
)]()[(
)(
)(
mjcmjJ
mjmmjJ
mjJmmjJJ
mjiJJmmjJJ
mjJimJiJimJmjJJ
mjmmjJ
mjJiJJiJiJJmjJJ
JiJJJJ
jmJiJJJjmJJ
jmiJJJjmJJ
z
z
yxz
xyyxz
z
xzyyzxz
xzyyz
yzxzz
yxzz
-
--
-
-
-
-
-
)
)
)
:s m(usporedbo
:(koristimo
:(koristimo
c je ovdje neizračunata konstanta

Zadatak za domaću zadaću
1'')1)(('' mmjjmjmjmjJmj
pokazati:
krenuti od:
u slučaju problema, pogledati u skoro bilo koju knjigu iz kvantne mehanike (Messiah, Sakurai, ...)
zz JJJJJ 22-
i koristiti rezultat prošlog zadatka:
1 mjcmjJ
koristiti: JJ )( -†

Eulerovi kutovi u klasičnoj mehanici
rotiranje tijela se najopćenitije opisuje Eulerovim kutovima :
1) rotacija oko z-osi za kut
2)rotacija oko nove, y’-osi, za kut ,
3) rotacija oko nove, z’’–osi, za kut .
-sve rotacije vrše se u smjeru obrnutom od kazaljke na satu

D-funkcija u kvantnoj mehanici rotacija se opisuje s tri nezavisne
konstante gibanja – uvodi se tzv. D-funkcija (“D” dolazi od njemačkog izraza za rotaciju: Drehung)
D-funkcija je rotacijska valna funkcija, tj. vlastita funkcija operatora momenta impulsa
njima se također opisuju transformacije između različitih koordinatnih sistema
ovisno o području fizike, koriste se razne konvencije što se tiče faze i predzanka (na ovom kolegiju koristit će se standard uveden od Bohra i Mottelsona)...

D-funkcija
/// '''),,( zyz JiJiJi eeeD
za Eulerove kutove , i , D-funkcija se definira kao:
reducirana matrica rotacije definira se ovom relacijom:
MJeMJd JyiJMM
/' ')(
veza je, dakle, dana s:
)(),,( '')'( J
MMiJ
MM deD MM
),,(),,(' ' JMMDMJDMJ
njen efekt na valnu funkciju s kvantnim brojevima J i M dan je s:
dakle:'),,(),,(
'' MJDMJD
M
JMM

D-funkcija ako se neko stanje pri rotaciji transformira ovako:
i
jijii MJVMJRMJRDVRDMJMJVMJ '')()(' *
transformacija tenzorskih operatora?
MJRDMJ )(
onda se očekivana vrijednost vektorskog operatora V transformira ovako:

Wignerove D-matrice
DMM’ su također koeficijenti reprezentacije grupe rotacija:
),(),,()','( ''
' JMM
JMMJM YDY
JMM
JMM
JMM
JMMz
DJJDJ
MDDJ
''2
''
)1(
D-matrice su vlastite funkcije operatora momenta impulsa:
drugim riječima, D-funkcija ne mijenja vrijednost J:
MJDJJ
MJJDMJDJ
),,()1(
),,(),,( 22

Svojstva Wignerovih D-matrica reducirana matrica rotacije je posve realna i ima svojstva:
'
1
1
'''
''
'
''
''
'
12
2)(cos)()(
)()1()(
)()(
)()1()(
JJJMM
JMM
JMM
MJJMM
JMM
JMM
JMM
MMJMM
Jddd
dd
dd
dd
k
kmmkmmjk
j
kmmkkmjkmjmjmjmjmjd
mm !)!'()!()!'(
)2
(sin)2
(cos)1(!)'()!'()!()!()(
2'2'2
može se pokazati (ali nije trivijalno – vidi Sakurai pp.221-223):
WIGNEROVA formula

Simetričan rotor
D-matrica je vlastita funkcija operatora Jz, J3 i J2:
JKM
JKM
JKM
JKM
JKM
JKMz
DJJDJ
KDDJ
MDDJ
)1(2
3
M – projekcija ukupnog impulsa vrtnje J u smjeru osi kvantizacije z (dakle, u laboratorijskom sustavu)
K – projekcija ukupnog impulsa vrtnje J u intrinsičnom koordinatnom sustavu (os x3)
(K u intrinsičnom sustavu ima istu ulogu kao M u laboratorijskom)

D-funkcija transformacija pariteta daje (shematski zapis):
proizvoljna D-funkcija nema, dakle, dobro definiran paritet
konstrukcija valne funkcije dobrog pariteta:
JKM
KJJKM DPD
)1(
),,()1(),,()1(16
12
02
JKM
KJJKM
Krot
DDJ
KMJ

Primjer 1. Spin 1/2
)()()(),,( zyz DDDD
2/2/2/ 323 iii eee
produkt operatora rotacije
se u reprezentaciji matricama 2x2 svodi na:
a to se može raspisati kao
)cos()sin(
)sin()cos(
0
0
)cos()sin(
)sin()cos(
0
0
2/2/
2/2/
2/2/
2/2/
2/)(2/)(
2/)(2/)(
2/
2/
2/
2/
ii
ii
i
i
i
i
ee
ee
e
e
e
e

Zadatak 3. Vlastita stanja momenta impulsa |j,m=mmax=j>
zarotirana su za infinitezimalni kut oko osi y. Bez upotrebe eksplicitnog izraza za , izračunajte vjerojatnost da se novo rotirano stanje nalazi u originalnom stanju do na kvadratične članove u . Rješenje 3.
JMM'd

Zadatak 3. Vlastita stanja momenta impulsa |j,m=mmax=j>
zarotirana su za infinitezimalni kut oko osi y. Bez upotrebe eksplicitnog izraza za , izračunajte vjerojatnost da se novo rotirano stanje nalazi u originalnom stanju do na kvadratične članove u . Rješenje 3. Zarotirano stanje dano je s:
jjJiiJ
jjiJ
jjdjjyRjj
yy
yjR
,2
)(1
,exp,)(,)ˆ,(,
22
22
JMM'd

Zadatak 3. Vlastita stanja momenta impulsa |j,m=mmax=j>
zarotirana su za infinitezimalni kut oko osi y. Bez upotrebe eksplicitnog izraza za , izračunajte vjerojatnost da se novo rotirano stanje nalazi u originalnom stanju do na kvadratične članove u . Rješenje 3. Zarotirano stanje dano je s:
Uvodimo:
jjJiiJ
jjiJ
jjdjjyRjj
yy
yjR
,2
)(1
,exp,)(,)ˆ,(,
22
22
yx iJJJ
JMM'd
yx iJJJ i
JJJ y 2

Rješenje 3. Dobivamo:
Koristimo poznate relacije:
odnosno:
jjJJJJi
jjR
,)(8
)(2
1, 22
2
1,)1)((,
1,)1)((,
mjmjmjmjJ
mjmjmjmjJ
1,2,,
1,2,
0,
jjjjjJjjJJ
jjjjjJ
jjJ

Rješenje 3.
Dobivamo:
Dakle, vjerojatnost da rotirano stanje nađemo u originalnom stanju je:
2,)12(2,22
1,1,2
1,2,2
jjjjjjj
jjJjjJj
jjJJjjjJJ
2,)12(4
1,22
,1
2,)12(28
,28
1,22
,,
2
4
2
22
jjjjjjjjjj
jjjjjjjjjjjjjjR
...2
22
4
2211,,
j
Rjjjjj
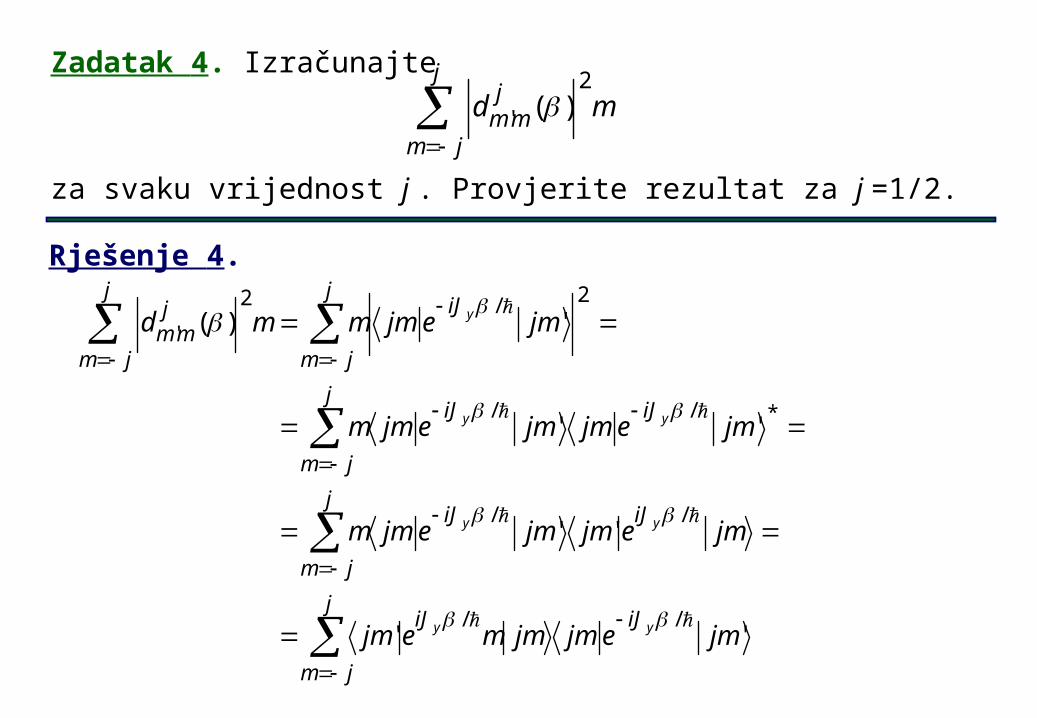
Zadatak 4. Izračunajte
za svaku vrijednost j . Provjerite rezultat za j =1/2.
Rješenje 4.
mdj
jm
jmm
2
' )(
''
''
''
')(
//
//
*//
2/2
'
jmejmjmmejm
jmejmjmejmm
jmejmjmejmm
jmejmmmd
yy
yy
yy
y
iJj
jm
iJ
iJiJj
jm
iJiJj
jm
iJj
jm
j
jm
jmm

Rješenje 4.
S druge strane vrijedi:
')ˆ,()ˆ,('1
''1
'')(
*
//
//2
'
jmyDJyDjm
jmeJejm
jmejmjmmejmmd
z
iJz
iJ
iJj
jm
iJj
jm
jmm
yy
yy
jj
zjz JyRyDJyD )ˆ,()ˆ,()ˆ,(*
cos0sin
010
sin0cos
)ˆ,( yR

Rješenje 4.
Za j =1/2 vrijedi:
a) za m’ =1/2
cos'
cos''2
'sin1
''cos''sin1
)(2
'
m
mjmJJ
jm
jmJjmjmJjmmd zx
j
jm
jmm
)2/cos()2/sin(
)2/sin()2/cos()(2/1
'
mmd
cos'cos2
1
2cos
2
1
2sin
2
1)( 22
2/1
2/1
22/12/1 mmd
mm

Rješenje 4.
b) za m’ = -1/2
cos'cos2
1
2sin
2
1
2cos
2
1)( 22
2/1
2/1
22/12/1 mmd
mm

Zadatak 5. Izračunati:
Rješenje 5.
)(1' mmd
za J=1 moramo korisiti matričnu reprezentaciju dimenzije 3x3
za reducirane Wignerove matrice trebamo samo Jy, zato koristimo:
i
JJJ y 2
)(
020
202
020
2)1(
i
ii
i
J jy
m=1 m=0 m=-1
m’=1
m’=0
m’=-1
da bi dobili:
1'')1)(('' mmjjmjmjmjJmj
koristimo:

Zadatak 5. Izračunati:
Rješenje 5.
)(1' mmd
primjer: m=0 i m’=1
10111)101)(01(0111 J
2)101)(01(0111 10111 J
0)101)(01(0111 10111 J
22
2
02
2
)( i
ii
JJJ y

Zadatak 5. Izračunati:
Rješenje 5.
)(1' mmd
sljedeći korak: razvoj u red /yiJ
e
...!3
1
!2
11
32/
yyyiJ iJiJiJ
e y
202
040
202
2
020
202
020
020
202
020
2
2
2)1(
i
ii
i
i
ii
i
J jy
2

Zadatak 5. Izračunati:
Rješenje 5.
)(1' mmd
)1(22
3
2)1(
020
202
020
2
0240
24024
0240
2
020
202
020
2202
040
202
2
jy
jy
J
i
ii
i
i
ii
i
i
ii
i
J
3

Zadatak 5. Izračunati:
Rješenje 5.
)(1' mmd
1cossin1
...!4
)(
!2
)(...
!3
)(1
...)(!4
1)(
!3
1
!2
11
...!4
1
!3
1
!2
11
2
4223
4232
432/
yy
yy
yyyy
yyyyiJ
JJi
iiJii
J
iJiJiJiJ
iJiJiJiJe y

Zadatak 5. Izračunati:
Rješenje 5.
)(1' mmd
)cos1(2
1sin
2
1)cos1(
2
1
sin2
1cossin
2
1
)cos1(2
1sin
2
1)cos1(
2
1
1cos
202
040
202
4
1sin
020
202
020
21)(1
i
ii
ii
d

Zbrajanje dva momenta impulsa
21ˆˆˆ jjJ
0],[ 21 ji jj
kijkji jijj 111 ],[ kijkji jijj 222 ],[
zbrajamo dva operatora momenta impulsa ( , ) koji zadovoljavaju uobičajene komutacijske relacije (u različitim potprostorima):
1j 2j
za bilo koji par operatora iz različitih potprostora vrijedi:
kijkji JiJJ ],[
važno - sumirani moment impulsa zadovoljava iste komutacijske relacije:

Zbrajanje dva momenta impulsa
22112211 mjmjmjmj
MJjjMJ 21–
Clebsch-Gordanov problem
moguća su dva izbora baze čitavog sistema:
zz jjjj 2122
21 ,,,
zJjjJ ,,, 22
21
2
unitarna transformacija koja povezuje dvije baze:

Zbrajanje dva momenta impulsa
22112211
1
11
2
22
mjmjMJmjmjMJj
jm
j
jm
Clebsch-Gordanovi koeficijenti
standardni izbor faze:
realni) (i 02211 JJjjjj
MJMJmjmjmjmjjj
jjJ
J
JM
21
21
22112211 obrat:

Clebsch-Gordanovi koeficijenti
Mmm 21
svojstva:
1) za
2) također za:
3)
4)
5)
6)
100 mjmj
02211 MJmjmj
2121 jjJjjJ ili
121212211 jjjjjjjj
''22112211 ''1
11
2
22
MMJJ
j
jm
j
jm
MJmjmjMJmjmj
''22112211 2211
21
21
21
21
'' mmmm
jj
jjJ
jj
jjM
MJmjmjMJmjmj

3j-simboli
MJmjmjJMmm
Jjj Mjj
221121
21
12
)1( 21
definicija:
svojstva:
1)
2)
3)
132
132
213
213
321
321
mmm
jjj
mmm
jjj
mmm
jjj
312
312
321
321 321)1(mmm
jjj
mmm
jjj jjj
321
321
321
321 321)1(mmm
jjj
mmm
jjj jjj

Zadatak 6. Krećući od definicije 3j-simbola “prevedite” svojstva 1)-3) na Clebsch-Gordanove
koeficijenteRješenje 6. (uzimamo j3=J, m3=-M)
2)
MJmjmjMJmjmjJjj
1122221121)1(
1)
22112
221112
)1(
12
)1( 2121
mjmjMJj
MJmjmjJ
mjJMjj
22112
221112
12)1( 12 mjmjMJ
j
JMJmjmj
mjJ
MJmjmjJ
MJmjmjJ
MjjJjj
Mjj
1122221112
)1()1(
12
)1( 12
21
21

Zadatak 6. Krećući od definicije 3j-simbola “prevedite” svojstva 1)-3) na Clebsch-Gordanove
koeficijenteRješenje 6. (uzimamo j3=J, m3=-M)
3)
MJmjmjMJmjmjJjj
2211221121)1(
MJmjmjJ
MJmjmjJ
MjjJjj
Mjj
2211221112
)1()1(
12
)1( 21
21
21

Zadatak 7. Pokažite:
Rješenje 7.
221112
122211
2
12)1( mjMJmjMJmjmjj
JmjJ
Mmm
Jjj
Mmm
Jjj Jjj
21
21
21
21 21)1(3)
2)
21
21
21
21 21)1(mMm
jJj
Mmm
Jjj Jjj
21
21
21
21
mMm
jJj
Mmm
Jjj
def
22112
221112
)1(
12
)1( 2121
mjMJmjj
MJmjmjJ
mJjMjj

Zadatak 7. Pokažite:
Rješenje 7.
221112
122211
2
12)1( mjMJmjMJmjmjj
JmjJ
22112
)(2211
12
12)1( 2121 mjMJmj
j
JMJmjmj
MjjmJj
22112
221112
12)1( 12 mjMJmj
j
JMJmjmj
mjJ
Mmm 21uz

3j-simboli daljnja svojstva (relacije ortogonalnosti):
4)
5)
,33
,33
1
11
2
2212
1
3,321
,321
321
321mmjj
j
jm
j
jm jmmm
jjjmmm
jjj
,22
,11
21
213
3
33
,3
,2
,1
321
321
3213 )12(
mmmm
jj
jjj
j
jmmmm
jjj
mmm
jjjj

3j-simboli specijalni slučajevi:
1)
2)
2211 jmjm i 2121 jjJjjM i
1)(2
1
1)(2
)1(
)(
21
21212211212121
21212121
jj
jjjjjjjjjjjjjj
jjjj jjjj
021 jjj i jJmM i
021 i mmm
12
)1(00
12
)1(
0
0 0
jmjmj
jmm
jj mjmj
}

Racahova formula za 3j-simbole
općenita formula za bilo koji 3j-koeficijent:
t
t
fba
etbdtatcbaetacdtbct
cbafed
cbafcfcebebdada
)!()!()!()!()!(!
)1(
),,()1( )!()!()!()!()!()!(
)!1(
)!()!()!(),,(
cba
bacacbcbacba

Zadatak 8. Izračunati:
Rješenje 8.
'0
1
mm
jj
'mm mora biti:
mogući t-ovi:
mfemdjcbja , , , , , 01
t
t
mj
tmtjtmtjt
mjmjmjmjjjmm
jj
)!1()!()!1()!1(!
)1(
)!()!()!()!(),1,()1('0
1 1
010 tt i 1,0 t
)!22(
)!12(!1!1),1,(
j
jjj
)!1()!(
1
)!()!1(
1)!()!(
)!22(
)!12()1(
'0
1 1
mjmjmjmjmjmj
j
j
mm
jj mj

Zadatak 8. Izračunati:
Rješenje 8.
'0
1
mm
jj
)1)(12()1(
)2()1)(12(
1
2
1)1(
)!()!(
)()!()!(
)22)(12(2)!12(
)!12()1(
'0
1
1
1
jjj
m
mjjj
mjmj
mjmjmjmj
jjjj
j
mm
jj
mj
mj
mj
')1)(12(
)1('0
1mm
mj
jjj
m
mm
jj

Zbrajanje tri momenta impulsa
321ˆˆˆˆ jjjJ
moguća su tri izbora baze čitavog sistema, ovisno o
redoslijedu zbrajanja:
332211 mjmjmj
312321ˆˆˆ)ˆˆ(ˆ jjjjjJ
231321ˆˆ)ˆˆ(ˆˆ jjjjjJ
213231ˆˆˆ)ˆˆ(ˆ jjjjjJ

Zbrajanje tri momenta impulsa tri baze su međusobno povezane, npr.:
MJjjMJjjMJjjMJjjj
312231312231
12
''''
''233
12212312
''23123212312231312
)12)(12()1(
);()12)(12(''
321
MMJJJjjj
MMJJ
jJj
jjjjj
jjjJjjWjjMJjjMJjj
W je “Racahov W-koeficijent”, a vitičasta zagrada označava “Wignerov 6j-simbol” (ili koeficijent)
6j-koeficijent se mogu raspisati preko 3j-koeficijenata (netrivijalno, po potrebi pogledati Supek II, str. 629)

Sferični tenzorski operatori sferičnim tenzorskim operatorom ranga k zovemo skup
2k+1 veličina koje se pri rotaciji koordinatnog sustava transformiraju ovako:
k
kq
kqq
kq
kq
kq DTDTDT
''' ),,(),,(),,('
kqT
†
osnovna razlika u odnosu na npr. Kartezijeve tenzore je u njihovoj ireducibilnosti
raspisujući gornji izraz za infinitezimalne rotacije, može se pokazati (vidi npr. Sakurai, str. 236):
1)
2)
kq
kqz qTTJ ],[
kq
kq TqkqkTJ 1)1)((],[
ova dva izraza ponekad se koriste i kao definicija sferičnih tenzorskih operatora (vidi Greiner, str. 162)

Wigner-Eckartov teorem matrični elementi sferičnog tenzorskog operatora u bazi
momenta impulsa mogu se uvijek napisati kao:
gdje je s dvostrukom crtom označen “reducirani” matrični element koji je neovisan o “magnetskim” kvantnim brojevima m, m’ i q
prvi član – orijentacija sistema s obzirom na z-os (geometrija + simetrija!)
smisao teorema: za neku vrijednost m, m’ i q izračunati reducirani matrični element i zatim ga koristiti za računanje matričnih elemenata za svaki m, m’ i q
12'','','
,','
jmjqkmjmjTmj
jTj kkq

Wigner-Eckartov teorem primjer: j'j''JT m
kq i
1
1'2''1'''''','''','
',''',' 11
jmjmmjmjJmj
jj Jm
biramo: 0m znajući:
''''''10 '''','''',' mmmmjJmj
i:
)1'('
'''01''' '''
jj
mmjmj mm
'0''
'1'1'2)1(''01''' '1'
mm
jjjmjmj mj
'''''
)1')(1'2('
')1(
'0''
'1'mm
mj
jjj
m
mm
jj
JJJJ z , 2
111
10

Wigner-Eckartov teorem primjer:
)1'2)(1'('
1'2'
)1'(''
''''''
''''''1 ',''','
jjj
jm
jjm
mm
mmjj J
)1'('''1'''
1'2
)1'2)(1'('''1'''
1'2''1'''''','''','
''''''
''''''
11 ',''','
jjmjmmj
j
jjjmjmmj
j
JmjmmjmjJmj
mm
mm
m
jj
j'j''JT mkq i
1

Projekcijski teorem specijalan slučaj Wigner-Eckartovog teorema za vektorske
operatore (za slučaj j’=j):
mjJmjmjVmj qjj
mjjmjq ',','
)1(2
,Vˆ,'
primjer: magnetski dipolni moment neparne jezgre
slglgV NsNlsl ˆˆˆˆˆˆ
)1(
')1(
'
ˆˆ'
ˆˆ
jj
mjjmjjj
mjmj
mjjmjm
mjjmjzz
... Schmidtove granice